

L6246
12V VOICE COIL MOTOR DRIVER
12V (±10%) OPERATION
3A MAXIMUMCURRENT CAPABILITY
0.3ΩMAXIMUM ON RESISTANCE OF EACH
POWER DMOS AT A JUNCTION TEMPERATAUREOF25°C
CLASS ABPOWER AMPLIFIERS
LOGICAND POWERSUPPLYMONITOR
POWERONRESET
PARKING FUNCTION WITH SELECTABLE
RETRACT VOLTAGE AND DYNAMIC BRAKE
BEFOREPARKING
ENABLEFUNCTION
GATE DRIVER FOR EXTERNAL BLOCKING
N-MOSFET
OVERTEMPERATUREPROTECTION
OVERTEMPERATUREWARNING OUTPUT
PQFP44PACKAGE
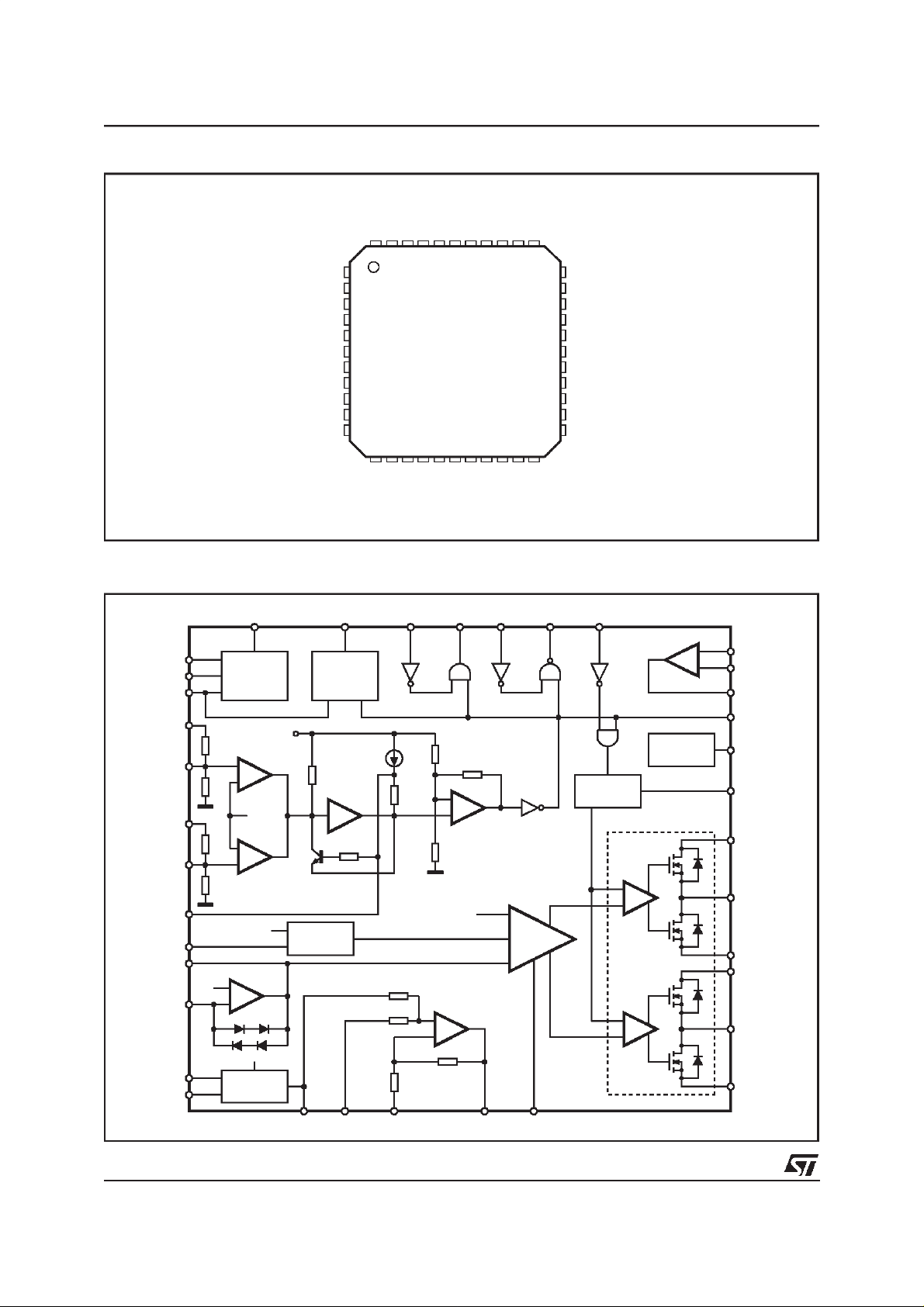
DESCRIPTION
The voice coil driver L6246 is a linear power amplifier designed to drive single phase bipolar DC
motors for hard disk drive applications. The device contains a selectable transconductanceloop,
which allows high precision for head positioning.
The power stage is composedof 2 power amplifiers, in AB class, with 4 DMOSs, with Rdson of
0.5Ω (Sink+Source)maximum, in a H-bridge con-
MULTIPOWER BCD TECHNOLOGY
PQFP44(10x10)
figuration. Drive voltage for the upper DMOS
FETs is provided by a charge pump circuit to ensure low Rdson.
Automaticbrake and parking of the head actuator
is performed by logic or when a failure condition
is detectedby power supply monitors.An external
resistor programs the parking voltage that enables the head retract. In addition, a 5V stable
output is provided for the external usage, and a
gate driver circuit enables an external power supply isolation N-MOSFET.
This device is built in BCD II technologyallowing
dense digital circuitry to be combined with high
power bipolar power devices and is assembled in
PQFP44.
February 1998
1/12
L6246
PIN CONNECTION (Top view)
BLOCK DIAGRAM
C1
C2
VCP
V
CC
+12
FILTER CAP
V
DD
+5
FILTER CAP
T_CAP
RPARK
ERR_OUT
V
CC/2
ERR-
+5V REF
+5V REF_GND
N.C.
FILTER_CAP
BRAKE DELAY
-THERMAL SD
SENSE-IN+
SENSE-IN-
GND
ERR-OUT
ERR-
SENSE-OUT
N.C.
CP_GND GATE DRIVE
CHARGE
PUMP
GATE
DRIVER
+5
+
-
10K
REF1
-
10K
+
REF1
PARKING
ERROR
AMPL.
+
-
REF1
REF. VOLT.
GENERATOR
SENSE
V
CC/2
_IN+
GND
OUT-
VIN-
VIN+
-SPINDLE
START
10K
CC
V
C2
VCPC1VCCOUT+
171118 19 20 21 22
DDVCC
-AE_W_GATE
MOTOR START
MOTOR
START
V
-W_GATE
CC/2
V
30K
25K
+
GATE DRIVE
44 43 42 41 3940 38 37 36 35 34
1
2
3
4
5
6
7
8
9
10
12 13 14 15 16
VIN_OUT
4µA
-
20K
V
SENSE
AMPLIFIER
+
CC/2
VPARK
-
SENSE
_IN-
SENSE_
OUT
-POR
GND
CPGND
T_CAP
+5V REF
W_GATE
VBEMF
N.C.
33
ENABLE
32
31
-SPINDLE START
30
VCM PARK
29
-W_GATE
28
RPARK
27
VBEMF
26
+12SETPT
+5SETPT
25
24
+5V REF_GND
N.C.
23
D95IN241B
-AE
+
-
VCM
PARK
INPUT
AMPLIFIER
BRAKE
CIRCUIT
POWER AMPLIFIERS
VINVIN+
VIN_OUT
-POR
THERMAL -THERMAL SD
BRAKE DELAY
V
CC
+
-
OUT+
GND
V
CC
+
-
OUT-
GND
D95IN242B
2/12
L6246
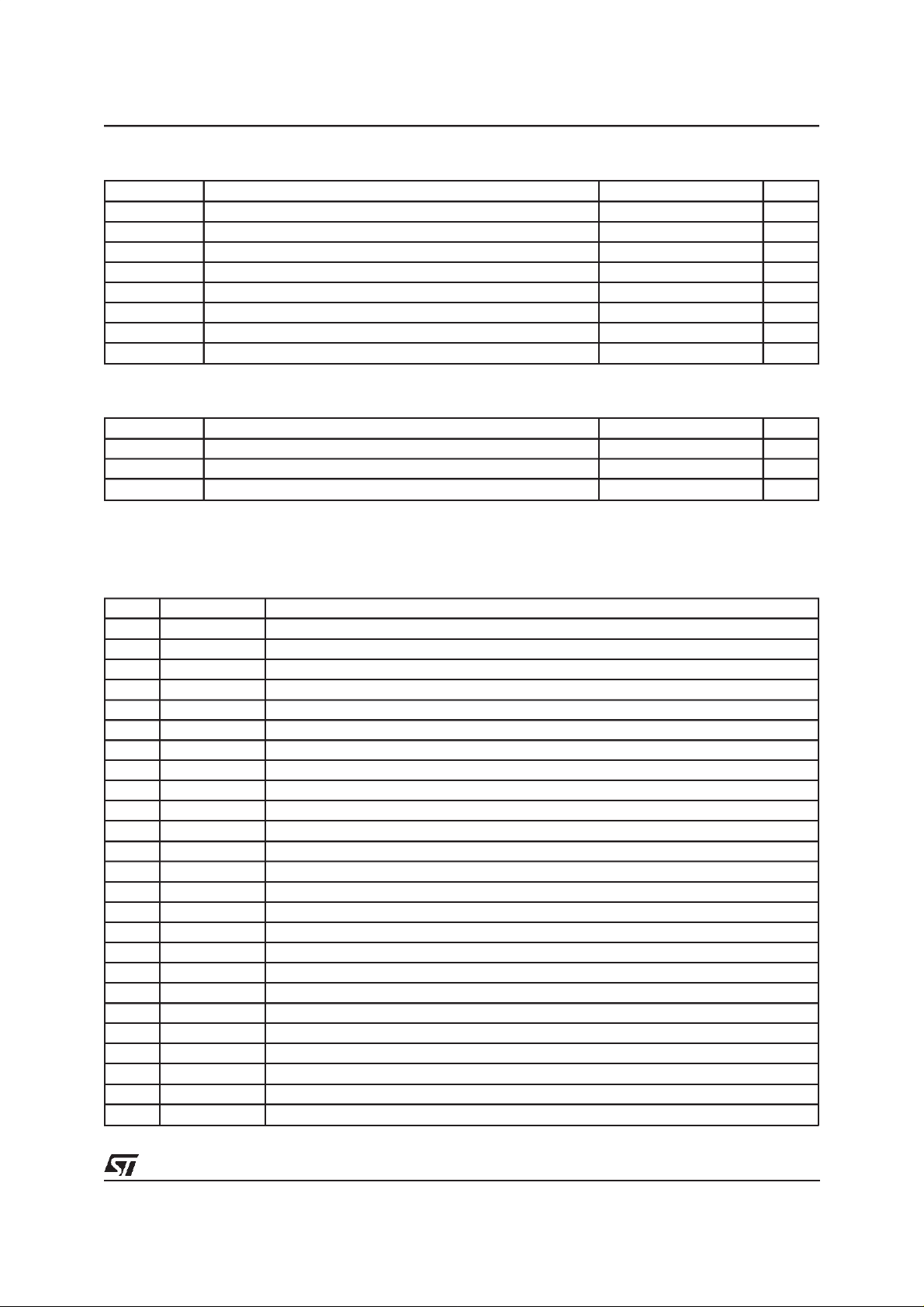
ABSOLUTE MAXIMUM RATINGS
Symbol Parameter Value Unit
V
pow. max.
V
digital max.
V
in max.
V
in min.
I
peak
I
dc
P
tot
T
op
THERMAL DATA
Symbol Parameter Value Unit
R
th j-case
R
th j-amb
R
th j-amb
(*) Standard boardconstruction: single layer (1S 0P); size 100mm long by 100mm wide.
(**) The board constructionincludes: a 6 layer board (2S 4P,with power planes ≅80%); size 136mm longby 99mm wide; package location
near middle pointof lenght and onethird of width.
Maximum supply voltage 15 V
Maximum supply voltage 7 V
Maximum input voltage V
±0.3 V
digital
Minimum input voltage GND - 0.3 V
Peak sink/source output current 3 A
DC sink/source output current 1.7 A
Maximum total power dissipation ≅1.7 W
Operative temperature range 0 to 80 °C
Thermal resistance junction to case ≅20 °C/W
Thermalresistancejunction toambientmountedon standard PCB(*) ≅66 °C/W
Thermal resistance junction to ambient mounted on PCB (**) ≅35 °C/W
PIN FUNCTIONS
Pin Name Description
1 N.C. Not Connected.
2 Filter_cap Filter capacitor for 10V internal regulator. The capacitor is optional.
3 Brake Delay Voice Coil Motor brake delay capacitor.
4 -Thermal SD Pre Thermal Shut Down indication Output.
5 Sense_in+ Non invertingInput of Sense Amplifier.
6 Sense_in- Inverting Input of Sense Amplifier.
7 Gnd Ground.
8 Err_out Error Amplifier Output.
9 Err- InvertingInput of Error Amplifier.
10 Sense_out Output of Sense Amplifier.
11 N.C. Not Connected.
12 Vin_out Output of Input Amplifier.
13 Vin- Inverting Input of Input Amplifier.
14 Vin+ Non invertingInput of Input Amplifier.
15 +Vcc/2 Half Supply Voltage reference.
16 +Motor start Motor start Output to Spindle Controller.
17 -AE_W_Gate Write Gate Output to AE.
18 +Vdd +5V Supply.
19 +Vcc +12V Supply.
20 -POR Power On Reset. Low willsignal thefailureof thelogic supply or 12V supply
21 +5V Ref +5V Reference Output from the Voltage Reference Regulator.
22 T_cap Power On Reset Timing Capacitor. The capacitor sets the POR delay.
23 N.C. Not Connected.
24 +5V Ref Gnd Ground for VoltageReference Generator.
25 +5Setpt +5V Monitor Set Point and filtering
3/12
L6246
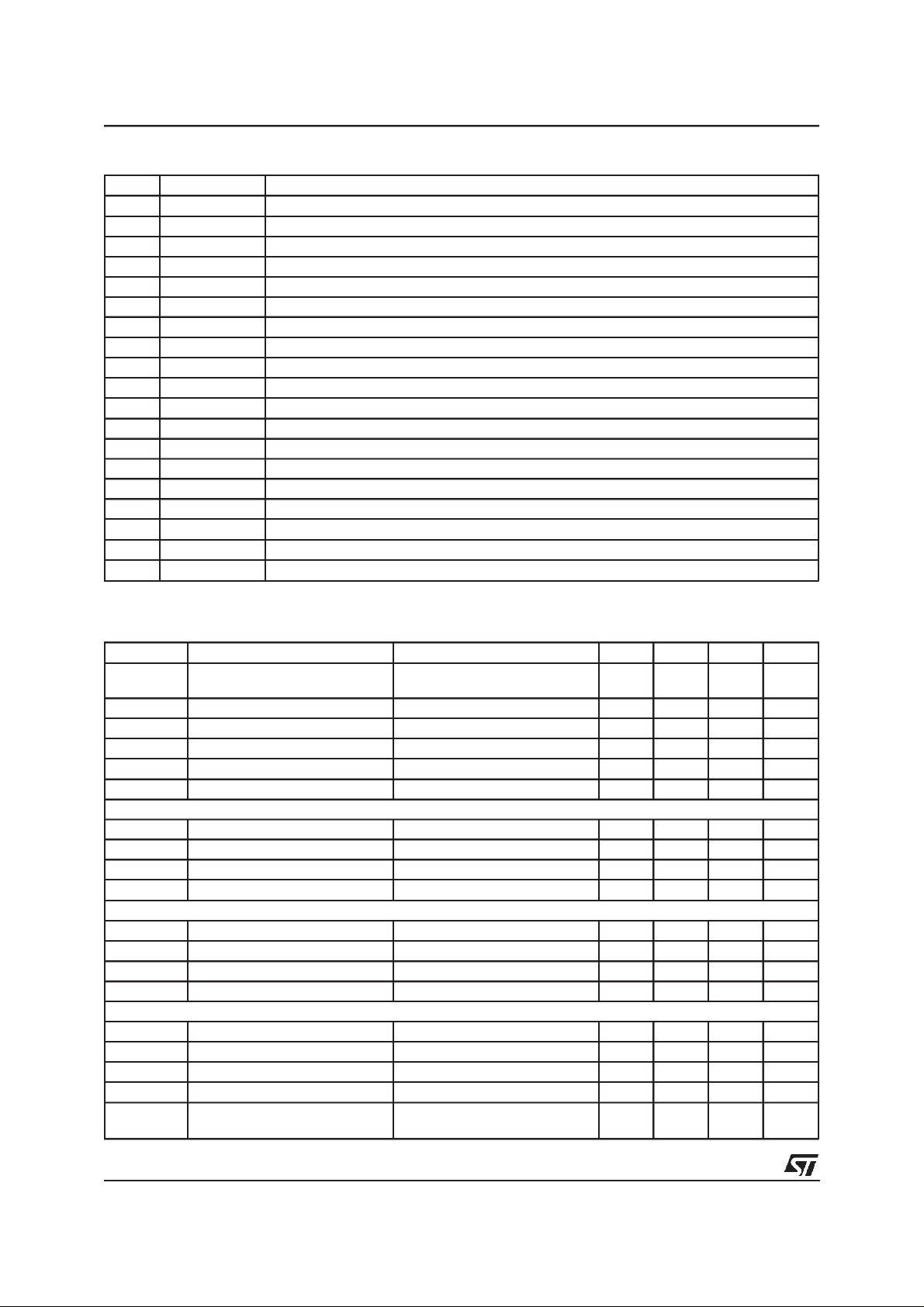
PIN FUNCTIONS (continued)
Pin Name Description
26 +12Setpt +12V Monitor Set Point and filtering
27 Vbemf Input BEMF from spindle motor for parking circuit.
28 Rpark Resistor for setting the park voltage.
29 -W_Gate Write Gate Input.
30 +VCM park External input for parking. High will activate the park procedure.
31 -Spindle_start Spindle Start input.
32 +Enable Input. logic low will disable only the IC.
33 N.C. Not Connected.
34 Cpgnd Charge Pump Ground.
35 Gnd Ground.
36 Out+ Power Amplifier Output.
37 Vcc +12V Power Supply.
38 C1 Charge Pump Oscillator Output.
39 C2 Input for external Charge Pump Capacitor.
40 Vcp Output for Charge Pump Storage Capacitor.
41 Vcc +12V Power Supply.
42 Out- Power Amplifier Output.
43 Gnd Ground.
44 Gate Drive Gate Drive for External Isolation N-MOSFETS.
ELECTRICALCHARACTERISTICS (Tj=25°C,Vdd= 5V, Vcc= 12V; unless otherwise specified.)
Symbol Parameter Test Condition Min. Typ. Max. Unit
Vcc Analog/Power supply voltage
range
Vdd Digital supplyvoltage range 4.5 5 5.5 V
Idd Digital supply quiescent current Output ENABLED 5 mA
Idd Digital supply quiescent current Output DISABLED 5 mA
Icc Power supply quiescent current Output ENABLED 20 mA
Icc Power supply quiescent current Output DISABLED 10 mA
THERMAL SHUT DOWN DATA
T
h_SD
T
h_SD_H
T
h_Warn
Shut down Temperature 135 160 °C
Shut down hysteresys 25 °C
Pre Shut down alarm 115 140 °C
Pre Shut down alarm hysteresys 15 °C
EXTERNAL N-MOSFET GATE DRIVER
Vll Low level voltage 500 mV
Vhl High level voltage Vcc+4 V
Isink Current sinking capability 4 mA
Isource Current source capability 0.5 mA
POWER ON RESET AND GATE SPECIFICATION
V
dd_und_th
V
cc_und_th
POR
POR
_delay
V
dd_POR_T_R
Digital undervoltage threshold 3.8 4.1 4.45 V
Power undervoltage threshold 8.5 9.25 10.0 V
POR timeout Cpor = 1µF 375 500 625 ms
_to
Time delay forPOR Active 1
Power supply POR thereshold
Resistance
10.8 12 13.2 V
10 K
s
µ
Ω
4/12

ELECTRICALCHARACTERISTICS (continued)
Symbol Parameter Test Condition Min. Typ. Max. Unit
V
CC_POR_T_R
Logic supply POR thereshold
Resistance
I
_POR_O
POR output current drive 4 mA
LOGIC INTERFACE VOLTAGE LEVEL (All digital inputs are CMOS compatible)
Voh CMOS high level output voltage Iout = 1.0mA 4.10 V
Vol CMOS low level output voltage Iout = 1.0mA 0.40 V
Vih TTL high level input voltage 2 V
Vil TTL low level input voltage 0.80 V
5V REFERENCE GENERATOR
Vref Voltage reference at Power On 4.75 5.00 5.25 V
Drift Drift from Power On -2 +2 %
loref Current output 10 mA
INPUT AMPLIFIER
Vi Input voltage range Vref (-) Vref (+) V
Vcm Input common mode voltage
range
Vds Input differentialvoltage swing -5 +5 V
Vos Input offset voltage -5 +5 mV
Ib Input Bias current -500 +500 nA
Gv Open Loop voltage Gain 80 dB
SR Output slew rate 0.6 V/µs
GBW Gain bandwidth product 1 MHz
PSRR Power supply rejection ratio 80 dB
Vo Output voltage swing 9 V
ERROR AMPLIFIER
Vi Input voltage range V
Vos Input offset voltage -5 +5 mV
Ib Input Bias current -500 +500 nA
Gv Open Loop voltage Gain 80 dB
SR Output slew rate 0.6 V/µs
GBW Gain bandwidth product 1 MHz
PSRR Power supply rejection ratio 80 dB
Vo Output voltage swing V
SENSE AMPLIFIER
Vi Input voltage range Gnd Vcc V
Vos Input offset voltage -6 +6 mV
Ii Input sink and source current -1.5 +1.5 mA
PSRR Power supply rejection ratio 50 dB
Gv Vloltage gain 9.9 10 10.1 V/V
Rin Differential input resistance 3 KΩ
GBW Gain bandwidth product 1 MHz
Vli Linear differential input voltage
Gv = 10(V/V) -0.35 +0.55 V
range
CMRR Common mode rejection ratio 56 dB
10 K
0 5.00 V
CC
-0.5
CC
-2Vbe
/2
/2
VCC/2
+0.5
VCC/2
+2Vbe
L6246
Ω
V
V
5/12

L6246
ELECTRICALCHARACTERISTICS (continued)
Symbol Parameter Test Condition Min. Typ. Max. Unit
POWER AMPLIFIER
Rdson DMOS on resistance at 25°C 0.3 Ω
Gdv Differential voltage gain 32 V/V
Iol Output current leakage 500 µA
SR Output slew rate 0.4 V/µs
Tsr Saturation recovery time 5 µs
GBW Gain bandwidth product 100 KHz
RETRACT
Vr Max. retract voltage Vcc shorted to GND 300 mV
Vr Max. retract voltage Vcc Normal 1 V
CHARGE PUMP
Cs Storage capacitor 1 µF
Vs Storage voltage Vcc +4 V
Cp Pump capacitor 0.2 µF
RETRACT TRUTH TABLE
Input Input Output Output
-Retract +Enable Bridge Enable +Retract
Brake and Retract 0 X 0 1
Run 1110
Disable 1000
BLOCK DESCRIPTION
POWERAMPLIFIERS
The two power amplifiers are connected in bridge
configurationworking in AB class.
SENSEAMPLIFIER
The open loop gain and bandwith of this amplifier
are similar to the sense amplifier.
The negative input and the output of the error amplifier are accessible externally in order to have
the current loop compensationuser configurable.
The dynamic of the output is limited at +/- 2Vbe to
have a faster responseof the outputvoltage.
This stage senses the voltage drop across the
Rsense.
The input stage is supplied by the charge pump
voltage to have an high dynamic, while the other
sections of the amplifier are supplied by the voltage of 10.5V internally regulated to have an high
power supply rejection (this voltage,suppliesalso
the error amplifier, the input amplifier and the operational amplifier which generatesthe Vcc/2 volt-
INPUTAMPLIFIER
The inputs and the output pins are externally ac-
cessible to have the possibility to configure the
transconductance gain of the current control loop
selectingthe voltagegain of this amplifier.
The open loop gain and bandwith of this amplifier
are similar to the sense amplifier.
age).
The open loop gain is around 80dB and the bandwith is more than 1MHz.
The voltage gain is fixedinternallyat 10 V/V.
ERRORAMPLIFIER
This is the stage which compares the input volt-
age and the sense voltage, generatingthe control
voltage for the power section.
REFERENCE VOLTAGEGENERATOR
This block generates the two reference voltage
Vcc/2 and +5VREF.
The Vcc/2 voltage is used as reference by the
currentcontrolloop.
The +5VREF is a very stable voltage generator
that can be used as reference voltage of an exter-
nal DAC.
6/12

L6246
POWERSUPPLYMONITOR
This circuit monitors the logic supply (5V) and the
power supply (12V) and activates the power on
reset output (POR) and the VCM PARK circuit.
After both logic and power supply reach their
nominal value a timing capacitor (T_CAP) has to
be charge before the POR output change from
low to high level.
POR delay=
where:
C ⋅ V
I
C is the capacitor value connected at pin
T_CAP
V is delta voltage that capacitor have to be
charged(2.3V)
I is the costant current charging the capacitor
(4µA typ.)
At the two input pins, +12 FILTER CAP and + 5
FILTER CAP, can be connected two capacitors
for filtering the noise on the power supply, avoiding in this case undesired commutations of the
POR signal becauseof some fast negative spikes
on theline.
BRAKEAND PARKINGCIRCUITS
The voice coil driver is switched into the parking
condition through the VCM PARK input or when
the POR signal is low. In such condition immediately the output stage turns on the two lower
DMOS of the power bridge to activatethe BRAKE
of the voice coil motor.
After a delay generated by the capacitor at the
BRAKE DELAY pin, only one of the two lower
DMOS stays on while the opposite half bridge is
tristated.
BRAKEdelay=
where:
C ⋅ V
I
C is the capacitor value connected at pin
BRAKEDELAY
V is delta voltage that capacitor have to be
charged(3V)
I is the costant current charging the capacitor
(5µA typ.)
The parking voltage is then supplied by the
PARKINGcircuit connected to the output that has
been tristated.
The value of such a voltage is set by connecting
an external resistor between the RPARK pin and
ground.
Vbandgap⋅
=
V
r
Rpark
10
4
where:
Vr is the retract voltagefor parkingthe heads
Vbandgap is the internal bandgap reference
voltageof 1.4V
Rpark is value of the resistor connected at
RPARKpin
The parking circuit takes the power supply from
the spindle driver through the VBEMF pin, so that
in case of power fail the retract of the heads is
possible using the rectified BEMF voltage coming
from the spindle motor.
CHARGEPUMP
The charge pump circuit is usedas a means of al-
most doubling the power supply voltage (12V) in
order to drive the upper DMOS of the power
bridge.
The energy stored in the in the capacitor connected at VCP pin is also used to drive the gate
of the externalN-MOSFET.
GATE DRIVER
This circuit provide the voltage driving the gate of
the external isolation N-MOSFET, and it is controlledby thePOR signal.
THERMAL
The thermal protection circuit has two threshold,
the first if the pre shut down alarm that activates
the THERMAL SD signal and the second is the
shut down temperature that tristates the output
stage when the junction temperature increases
over thislevel.
APPLICATIONINFORMATION
Example of calculation of the error amplifier compansation for the stability of the current control
loop. As can be seen from the draw of the current
control loop circuit of the next page, the voltage
across the load is:
#1
CPW ⋅ACERR ⋅(ACINP ⋅
=A
V
L
V
=Rs⋅I
sense
L
VL=(ZL+ Rs)⋅ I
L
CENSE ⋅
-A
V
IN
V
sense
where AC... is the closed loop gain of Power, Error, Sense and Input Amplifier.
Changing in the #1 the transfer function between
the load currentand the V
is:
IN
#2
I
L
V
IN
=
ZL+ RS+ A
A
CPW
CPW
⋅
A
⋅ A
CERR
CERR
⋅
A
⋅ A
CINP
CSENSE
⋅ R
S
)
7/12

L6246
TypicalApplicationCircuit
V
CTL
V
REF
V
CC/2
10.5V
INT.REG.
1K
10K
10K
10K
10K
AE WGATE
MOTOR START
THERMAL SHTD
POR
(*)
Rs 0.2
OUT_ SENSE_IN- SENSE_IN+ OUT+
SENSE_OUT
ERR_OUT
1M1K
VIN_OUT
FILTER_CAP
42 6 5 36
10
8
1K
100nF
9
ERR-
12
VIN-
13
VIN+
14
V
CC/2
15
CPGND
34
GND
7,35,43
17
16
4
20 32 ENABLE
2
FILTER CAPACITORS TO BESET IN APPLICATION
VOICE COIL
MOTOR
LL RL
L6246
PQFP44
V
DD
100nF
10nF
V
18
DD
C1 C2
38 39
V
CC
19
V
CC
41
V
CC
37
44
27
40
28
21
24
26
25
22
3
30 VCM PARK
31 SPINDLE START
29 W GATE
GATE DRV
V
BEMF
V
CP
R
PARK
5V
REF
5V
GND
REF
12S
EPT
5S
SEPT
12S
EPT
5S
SEPT
D95IN268
22µF 100nF
1µF
51K
1µF
1µF
V
CC
S
P322
G
D
FROM
100nF
5V
REF
(*)
(*)
GND
SPINDLE
DRIVER
Current Control Loop Circuit
V
+ 10V
CC/2
SENSE
20K
V
2K
SENSE
2K
RB
VIN
RB
20K
RA
-
+
SENSE
AMPL.
V
CC/2
RA
-
+
INPUT
AMPL.
V
V
CC/2
- (RA-RB) VIN
CC/2
V
+ (RA/RB)(ZC/RC) VIN-10 (ZC/R1) V
CC/2
ERROR
AMPL.
V
CC/2
+
-
R1
R2
C
R3
1.1K
V
RC (=R1)
VL=32 ( (ZC/RC) VIN - 10 (ZC/R1) V
=A
D95IN269B
SENSE
TO
SENSE
Z
CC/2
AMPLIFIER
17.5K
C
+
-+
POWER
AMPL.
+-
LL
R
S
LOAD
VL
)
SENSE
RL
POWER
AMPL.
CPW*ACERR(ACIMP * VIN-ACSENSE*VSENSE
16.5K
)
-
+
1.1K
V
CC/2
8/12

L6246
If Now We Define:
#3
Aloop = A
CPW
⋅ A
CERR
⋅ A
CSENSE
⋅
RS+ Z
R
S
L
we obtain:
#4
Aloop⋅
I
L
=
V
IN
A
CINP
A
CSENSE
1+ Aloo p
1
⋅
R
S
Atlowfrequencyis:
Aloop = 32 ⋅
if R2 = 1M, R1 = 1K, R
R2
⋅ 10 ⋅
R1
S
=0.2, RL=7
(R
R
S
S
+ ZL)
then Aloop = 8889 = 80dB.
Being Aloop very high we can simplify the #4 in
this way:
I
A
L
V
IN
=
CINP
A
CSENSE
1
⋅
R
S
=
1
10 ⋅
0.2
1
=
2
and its pole is at frequency
1
2π L
(RS+ R
so around 1KHz if L = 1.2mH.
So considering:
Ax |
dB
= Aloop |dBA
dB
+ACSENSE |dB+
CERR
R
S
RS+ R
|dBA
dB
L
CPW
|
we have these Bode diagrams:
ACPW
30dB 130KHz
ACSENSE
20dB
)
L
210KHz
For the stability we have to study the stability of
Aloop, that as we can see from the #3 is a multiplication,so in dB is a sum:
Aloop |
+
dB
R
=ACPW |dB+ACERR |dB+ACSENSE |
dB
R
S
dB
+
Z
S
L
So we can take in consideration the BODE diagrams of the each operational amplifier, with particular attentionto the Error amplifier.
1)The Power amplifier is actually composed by
two operational amplifiers in the way to have
a gain of +16 and -16 (in voltage) respectevely,for a totalof 32 = 30dB.
The point at -3dB is around 130KHz.
2)The Sense amplifier has a gain of 20dB with
the point at -3dB around 210KHz.
3)The load introduce an attenuationof:
R
S
20log
RS+ R
= -31dBwith RS = 0.2 and RL =7
L
-31dB
LOAD
AX
19dB
1K 10K 100K
D95IN270A
As can be easily see the bandwith is narrow and
the gain is low. It is possible to increase both
choosing an appropriatecompensation of the Error amplifier.
The total bandwith should be, of course, at least a
decade lower of the 130KHz to avoid instability
problem. The bandwith guaranteed by the Error
amplifier has a Gmax of 80dB and a gain of 0dB
at 1MHz approximately, the real is some dB more
with a largerbandwith.
9/12

L6246
ERROR AMPL.
120
100
80
60
40
20
D95IN271
Using the compensation network of the draw of
pag.8, we have a error amplifier transfer function
of:
GAIN
(dB)
OPEN LOOP GAIN
1 10 100 1M 10M
1K 10K 100K
As can be seen the choice of the pole influence
overall in fixing the gain at high frequency.
The gain at high frequency must be choosen in
order to not create instability problem, because
more higher is this gain and lower is the second
pole that we have at high frequency.
If this pole is taken close to the other that we
have already seen at 130KHz and 210KHz, instabilityproblemscan arise.
Adding together AX |
dB
and A
CERR|dB
we ob-
taine the Aloop:
ACERR
(dB)
COMPENSATION AT 3Hz
60
40
20
AX(dB)
COMPENSATION AT 100Hz
V
V
so:
Gmax (DC) =
ZC
O
=−
R1
I
R2
R1
R2
=−
R1
= 1000= 60dB
with R1 = 1MΩand R2 = 1K
zero =
pole =
Note: Fpole is lower thanFzero
1
2 π R3C
1
2 π(R3 + R2) C
1+scR3
⋅
1 + sc (R3 + R2)
Ω
The best choice is to cancel the pole of the load
(at around 1KHz) with the zero of the compensation.
ACERR (dB)
120
100
80
60
40
20
D95IN272
X
CLOSED
LOOP
ACERR
1 10 100 1M 10M
1K 10K 100K
X
X
DIFFERENTS
POLES
EXAMPLES
19
A
(dB)
LOOP
79
60
40
20
D95IN273
10 100 1K 10K 100K 1M 10M
IS STABLE
IS NOT STABLE
So the choice of the compensation network must
be done in order to fix at thebeginning the Gmax
of the error amplifier dependingon the ratio
R2
R1
.
To calculate the R3 and C values satisfying the
followingsystem:
2 π R3C
1
=
R
2 π L
+ R
L
1
sense
Erroramplifierzeroequal to load pole
1
2 π(R3 + R2)C
AdmissibleBandwith
=
Gloop
=
130KHz
10
=
8912
=
1.5Hz
This example is for crossing the 0dB one decade
before the first pole of the Power Amplifier
(130KHz),startingwitha Gloop max of 79dB.
10/12

PQFP44 (10x10) PACKAGE MECHANICAL DATA
L6246
DIM.
mm inch
MIN. TYP. MAX. MIN. TYP. MAX.
A 2.45 0.096
A1 0.25 0.010
A2 1.95 2.00 2.10 0.077 0.079 0.083
B 0.30 0.45 0.012 0.018
c 0.13 0.23 0.005 0.009
D 12.95 13.20 13.45 0.51 0.52 0.53
D1 9.90 10.00 10.10 0.390 0.394 0.398
D3 8.00 0.315
e 0.80 0.031
E 12.95 13.20 13.45 0.510 0.520 0.530
E1 9.90 10.00 10.10 0.390 0.394 0.398
E3 8.00 0.315
L 0.65 0.80 0.95 0.026 0.031 0.037
L1 1.60 0.063
K0
(min.), 7°(max.)
°
D
D1
33
34
B
44
1
e
23
11
PQFP44
22
L1
E
L
E3D3E1
12
0.10mm
.004
Seating Plane
K
A1
A
A2
B
C
11/12

L6246
Information furnished is believed to be accurate and reliable. However, SGS-THOMSON Microelectronics assumes no responsibility for the
consequences of use of such information nor for any infringement of patents or other rights of third parties which may result from its use. No
license is granted by implicationor otherwise under any patentor patent rights of SGS-THOMSON Microelectronics. Specificationmentioned
in this publication are subject to change without notice. This publication supersedes and replaces all information previously supplied. SGSTHOMSON Microelectronics products are not authorized for use as critical components in life support devices or systems without express
written approval ofSGS-THOMSON Microelectronics.
1998 SGS-THOMSON Microelectronics – Printed in Italy– All Rights Reserved
SGS-THOMSON Microelectronics GROUPOF COMPANIES
Australia - Brazil - Canada - China - France- Germany - Italy- Japan - Korea - Malaysia - Malta - Morocco - TheNetherlands -
Singapore - Spain - Sweden - Switzerland- Taiwan - Thailand - UnitedKingdom - U.S.A.
12/12
 Loading...
Loading...