

L6245
5V HARD DISK DRIVE POWER COMBO
PRODUCT PREVIEW
General
+5V OPERATION
REGISTERBASEDARCHITECTURE
MINIMUMEXTERNALCOMPONENTS
SLEEP AND IDLE MODES FOR LOW
POWERCONSUMPTION
SELECTABLE GAINS FOR BOTH VCM AND
SPINDLEGm LOOP
LINEAR CURRENT CONTROL LOOPS FOR
BOTH VCM AND SPINDLE
8 BIT D/A FOR ACTUATOR DRIVER AND
SPINDLEDRIVER
VCM Driver
CURRENT SENSE CONTROL (VOLTAGE
PROPORTIONALTO CURRENT)
VOLTAGE SENSE CONTROL (VOLTAGE
PROPORTIONAL TO THE VOLTAGE
ACROSSTHE VCM)
TWO CURRENT RANGES FOR SEEKING
ANDTRACKING
INTERNAL REGISTER FOR POWER AMP
CONTROLLINES
SPEED OUTPUT (VOLTAGE PROPORTIONALTO BEMF)
Spindle Driver
BEMF PROCESSING FOR SENSORLESS
MOTORCOMMUTATION
PROGRAMMABLE COMMUTATION PHASE
DELAY
PROGRAMMABLE SLEW-RATE FOR REDUCEDEMI
0.7Ω TYP. FOR ANY HALF BRIDGE
CROSS CONDUCTION PROTECTION
SYNTHESIZEDHALL OUTPUT
OtherFunctions
POWER UP SEQUENCING
POWER DOWN SEQUENCING
LOW VOLTAGE SENSE
ACTUATOR RETRACTION
DYNAMICBRAKE
THERMAL SHUTDOWN
MULTIPOWERBCD TECHNOLOGY
PQFP64
ORDERING NUMBER: L6245
DESCRIPTION
The L6245 contains in a single chip all the functions to operate a sensorlessbrushless (DC) motor and a voice coil motor, suitable for hard disk
drive applications.
The device is configured to interface directly to
an 8 bit parallel microprocessor bus, and has a
register based architecture to reduce number of
interconnection lines. All the positioning loop for
sensorless spindle is integrated, including BEMF
sensing, digital masking, digital delay and sequencing. All timing function are performed digitally, thus no external filtering componentsare required.
The VCM driver is a transconductanceamplifier,
able to provide2 differentcurrentranges, suitable
for seeking or tracking of the head actuator.
When a low voltage is detected, a monitor, in sequence, resets the internal registers, puts in tristate the spindle powers, retractsthe actuator, and
appliesthe dynamic brake ofthe spindle.
The L6245 is realized in Multipower-BCD 2 technology, which combine isolate DMOS power transistors with CMOS and Bipolar circuits in the
same monolithic layer, and is assembled in a 64pin PQFP.
October 1992
This is advanced information on a new product now indevelopment or undergoing evaluation. Details are subject to change without notice.
1/15
L6245
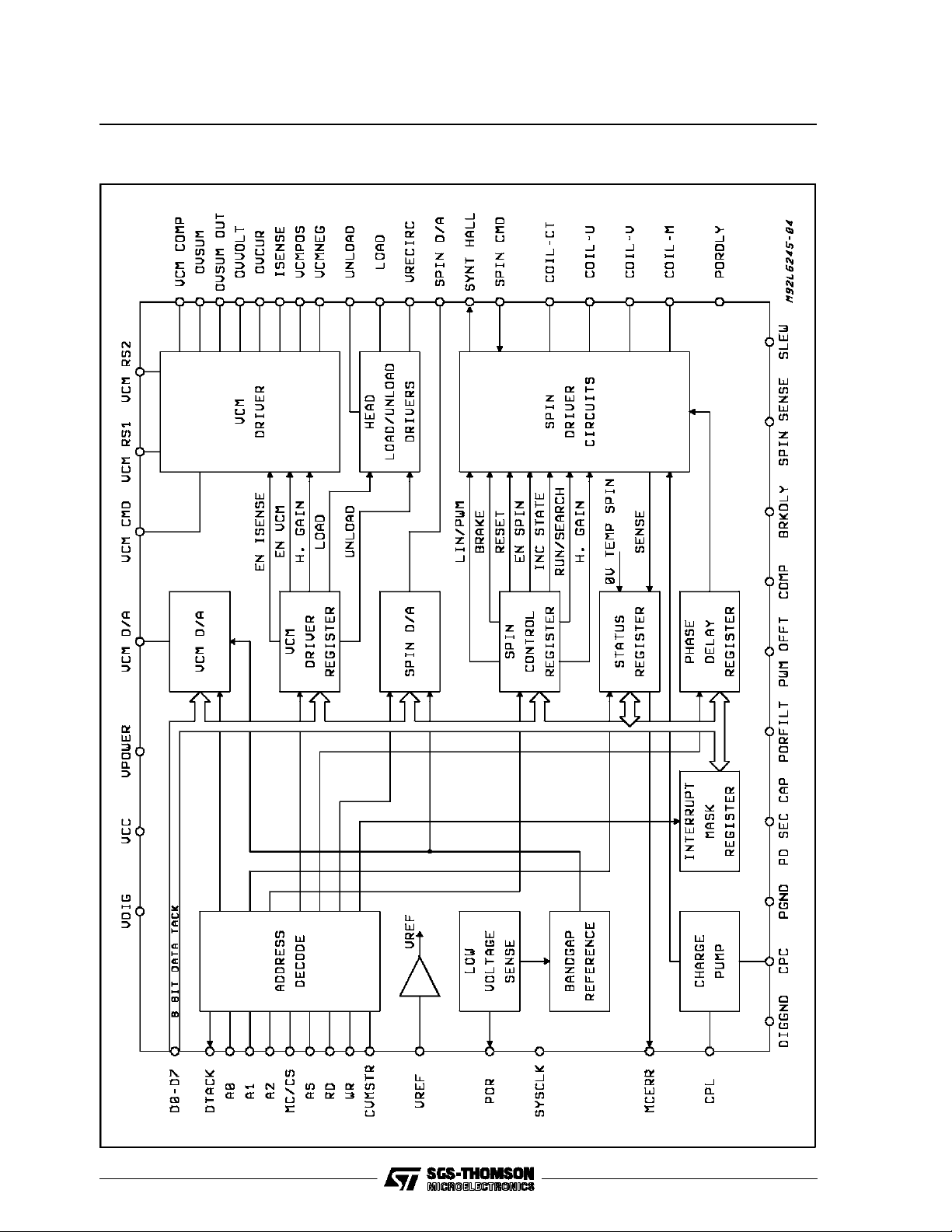
BLOCK DIAGRAM
2/15
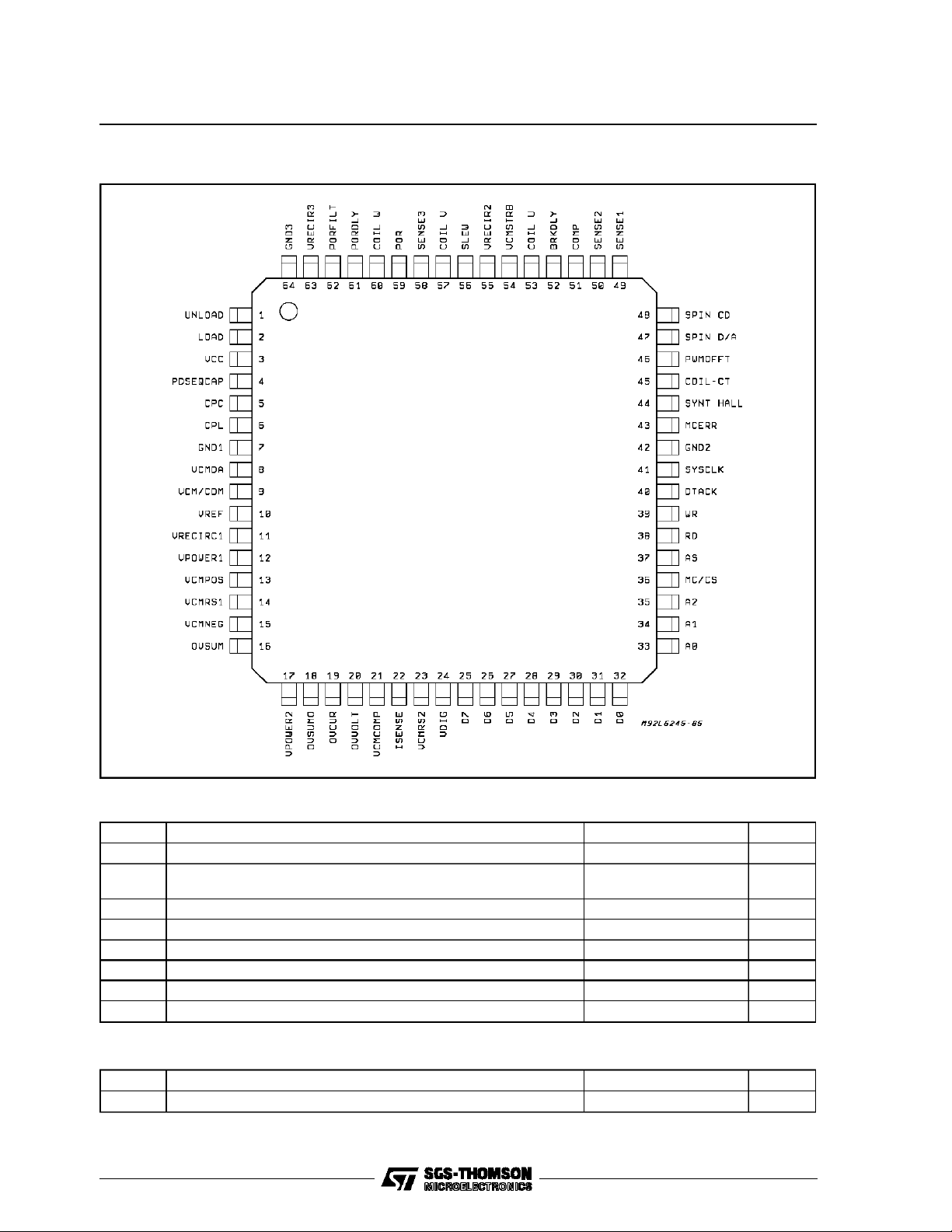
PIN CONNECTION (Top view)
L6245
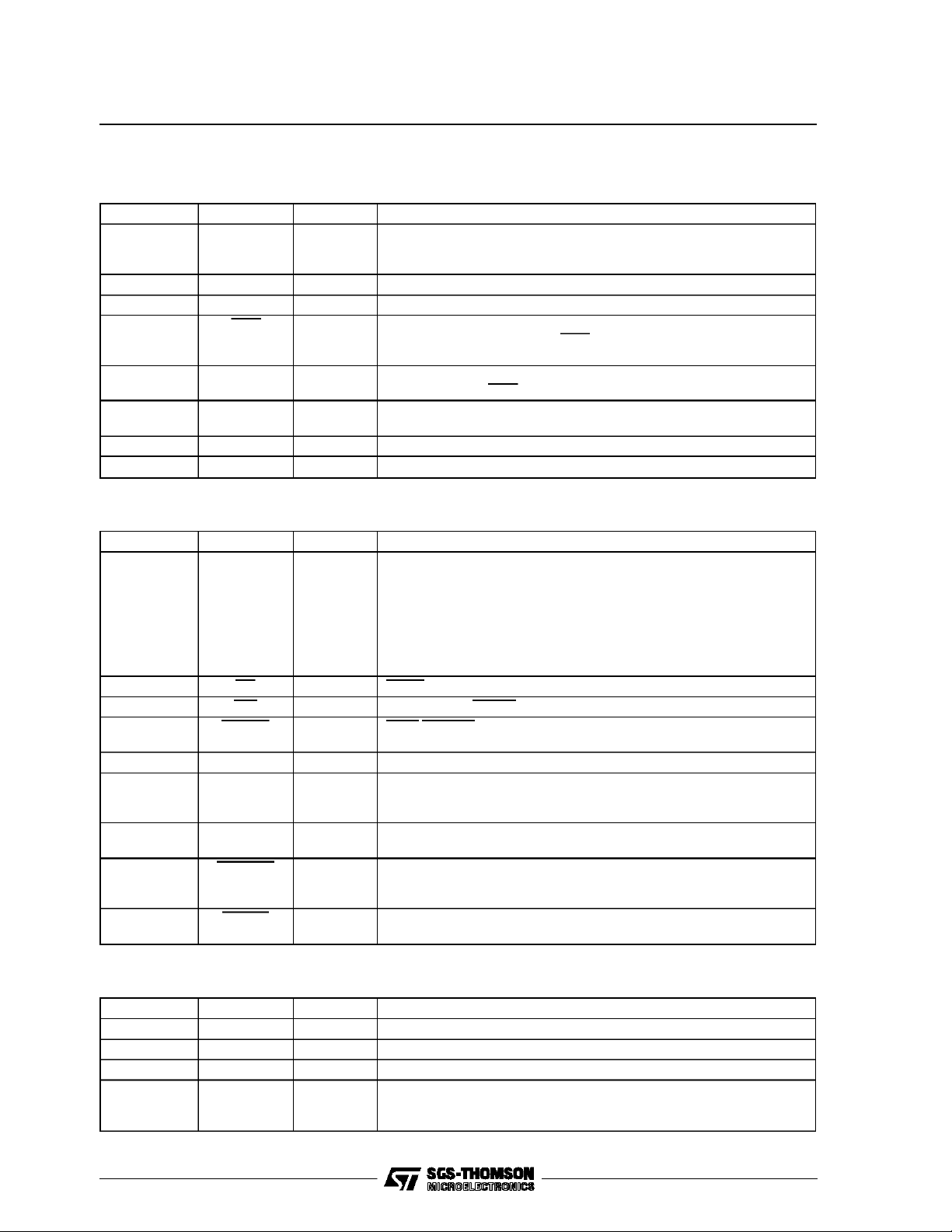
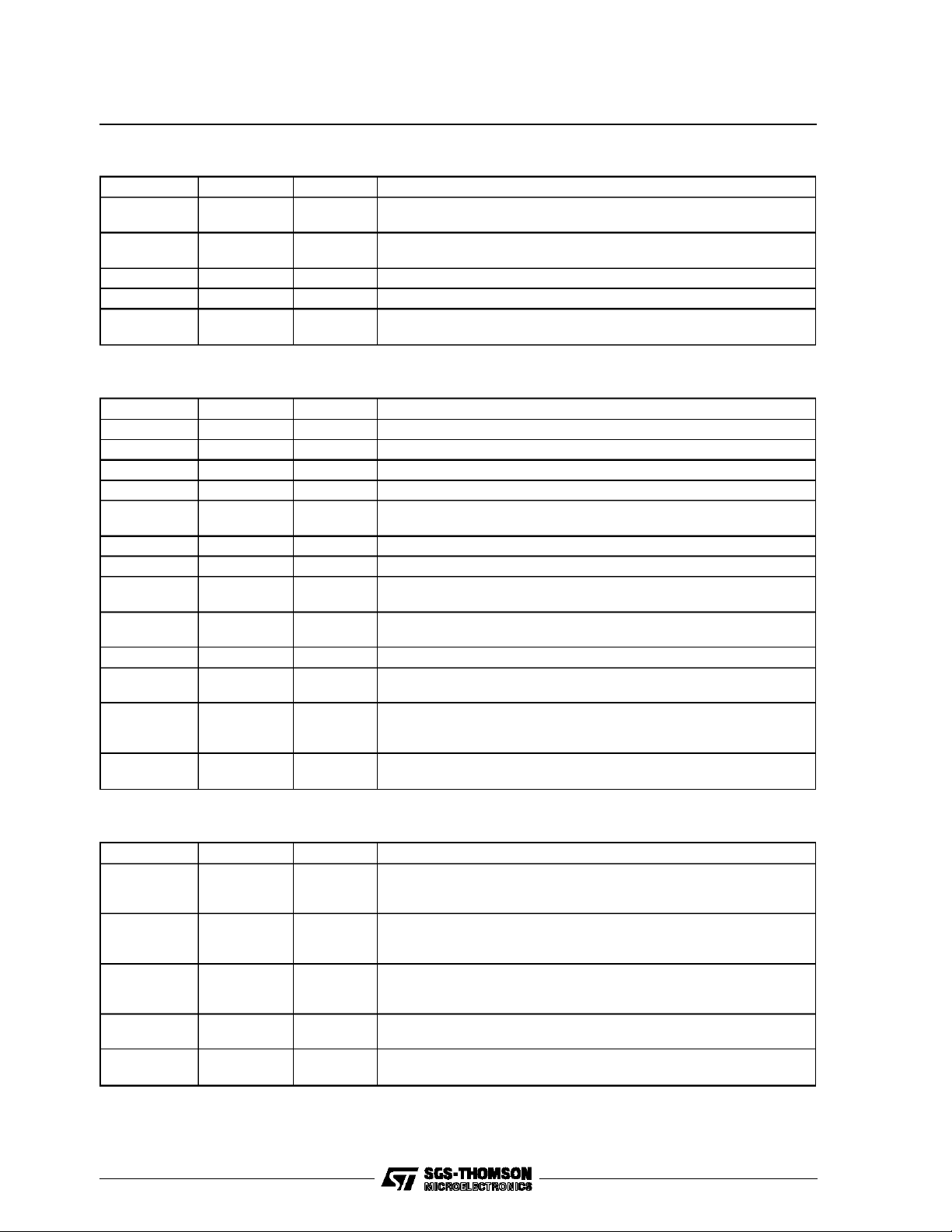
ABSOLUTE MAXIMUM RATINGS
Symbol Parameter Value Unit
V
ds sus
; Vcc Supply Voltage Power (VP)
V
P
V
V
I
I
P
T
stg,Tj
Peak Output SustainingVoltage 14 V
8
Logic(V
Logic input Voltage 0 to 6 V
i
Charge Pump Input Voltage 18 V
cp
Sink-Source Peak Output Current 1.5 A
p
Sink-Source DC OutputCurrent 1 A
O
Total Power Dissipation (T
tot
=60°C) 1 W
amb
CC
)
6
Storage and Junction Temperature –40 to 150 °C
THERMAL DATA
Symbol Parameter Value Unit
R
thj-amb
(*) Mounted on a typical PCB layout (see Fig. 7)
Thermal Resistance Junction-ambient (*) max. 90 °C/W
V
V
3/15
L6245
PIN DESCRIPTION [Pin Types:I =Input, O =Output, P =Power, A= Analog (passive)]
Power
Pin Number Pin Name Pin Type Description
12, 17
24,
3
7, 42, 64 GND P Ground.
10 V
59 POR 0 POWER ON RESET - Goes lowwhen the supplyvoltage is below the
61 POR_DLY A POR DELAY. An external parallel RC networkfrom thispin to ground
62 POR_FILT A An external capacitor from this pinto ground provides filtering for the
5 CPC A Charge pump capacitor
6 CPL A Charge pump inductor
VPOWER
VDIG
V
CC
REF
MicroprocessorInterface
Pin Number Pin Name Pin Type Description
25
26
27
28
29
30
31
32
38 RD I READ A low level on thispin allows the busto be driven by the IC.
39 WR I A low level on WRITE allows the ICto read data from thesystem bus.
35 MC_CS I CHIP SELECT A low level on this pin selects the IC for bus
41 SYSCLK I Microprocessor clock used forinternal timing.
33
34
35
37 AS I ADDRESS STROBE The address appearing on A [0:2] is latchedon
43 MC_ERR O A maskable interrupt signal which isasserted low when anerror flag in
40 DTACK O An open drain, activelow signal used for asynchronousbus
D7
D6
D5
D4
D3
D2
D1
D0
A0
A1
A2
P Positive supply, nominally 5V.
I All analog signals are referenced to thisvoltage, nominally 2V.
VOLTAGE GOOD threshold.POR is anopen collector output with an
internal 20kΩ pull-up.
sets the time thePOR signal staysactive after voltage good.
V
sense inputof the POR circuit.
CC
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I
I
I
An 8-bit bidirectional databus which is connected to the internal
registers.
transactions.
The lowest three bits of thesystem addressbus; used to address
internal registers
the falling edge of the AS pulse.
the Status Registeris set. The output is open-drain with an internal
20KΩ pull-up.
transactions.
Brushless,SensorlessMotor Driver and 8 bit D/A
Pin Number Pin Name Pin Type Description
47 SPIN_DAC O The output ofan 8 bit D/A used for the command to thespindle driver.
48 SPIN_CMD I The input to the spindledriver transconductance amplifier.
45 COIL_CT I The center tap of the motor is connected to this pin.
O The motor coilsare drivenby these outputs. Back EMF isalso sensed
at these pins.
4/15
53
57
60
COIL_U
COIL_V
COIL_W
PIN DESCRIPTION (continued)
Pin Number Pin Name Pin Type Description
44 SYNTH_HALL O A TTL compatible signal thatemulates one ofthe Hall signals.
SYNTH_HALL is an opendrain output with an internal20KΩ pull-up.
49, 50,
58
SPIN SENSE
1,2,3
A The current sensing resistors is connectedfrom these pinsto ground.
46 PWM_OFFT A A parallelR-C from thispin to ground sets the PWM mode OFF time.
56 SLEW A A resistor from thispin to ground setsthe slew rate of the driver.
51 S_COMP A An R-C network from this pin to GND setsthe spin driver
compensation.
VCM Driver and8 bit D/A
Pin Number Pin Name Pin Type Description
8 VCM_DAC O The output of an 8 bit D/A usedto command the VCM driver.
9 VCM_CMD I VCM driver input command which is relativeto V
21 VCM_COMP A An R-C network from this pin to ground compensates theVCM driver.
14 VCM_RS1 A The highgain current sense resistor is attached from this pin to ground.
23 VCM_RS2 A The low gain current sense resistor isconnected from this pin to
VCM_RS1
13 VCM+ O One end ofthe load is attached to this pin (Positive).
15 VCM- O The other end of the load is attached to this pin (Negative).
20 OV_VOLT O A voltagewhich is proportional to the voltage across the load,
referenced to V
REF
.
19 OV_CUR O A voltagewhich is proportional to the current through the load,
referenced to V
REF
.
16 OV_SUM– I Over-velocity summing op-amp inverting input.
18 OV_SUM_OUT O Over-velocity summing op-amp output.
REF
.
L6245
22 ISENSE O A voltagewhich is proportional to the current through the VCM load as
sensed by thesense resistor. This signal isenabled bysetting bit 2 in
the VCM ControlRegister.
54 VCM_STRB I The 8 bitinput to the VCM D/A is updated on therising edge of
VCM_STRB.
SolenoidPre-drivers and Power Down Sequencing
Pin Number Pin Name Pin Type Description
11,55,
63
2 LOAD_SOL O When a logic one is writtento bit 3 ofthe VCM Control Register,
1 UNLOAD_SOL O When alogic one is writtento bit 4 of the VCM Control Register,
4 PD_SEQ_CAP A When power is removed, the chargestored on thiscapacitor keeps
52 BRK_DLY A An external parallel RC network from thispoint toground delays
V_RECIR P Under normal conditions, power is supplied to variousblocks via the
V_RECIR pin. When externalpower is removed, energy stored in the
rotating spindle is converted toa voltage which suppliesthe park circuit.
current is sourced from the LOAD_SOL pin. Otherwise, the pin is high
impedance.
current is sourced from the UNLOAD_SOL pin. Otherwise, the pin is
high impedance.
selected blocks alive long enough toeffect an orderlypower down.
activation of the dynamic brake after power is removed.
5/15

L6245
ELECTRICALCHARACTERISTICS (VS= 5V, Tj=25°C; unlessotherwisespecified)
PowerSupply Characteristics
Symbol Parameter Test Condition Min. Typ. Max. Units
V
S
ID-READY
Supply Voltage VS=VP=V
Quiescent Current Dissipation No load attached VCM andSpin
ID_IDLE
ID_SLEEP
VCM Driver (Notes1, 2)
CC
drivers enab.
VCM driver disabled Spin driver
enabled
VCM and Spin driversdisabled
4.5 5.5 V
25
20
4
mA
mA
mA
I
OS
Maximum Load Current
Output Devices A, B, E, F (Fig. 1) 0.3 A
(Seeking)
I
OT
Maximum Load Current
Output Devices C, D (Fig. 1) 0.1 A
(Traking)
R
R
DS(on)
DS(on)
Source & Sink OutON
Resistance
Output Devices A, B, E, F
T
= 125°C (Fig. 1)
j
Sink Out On Resistance Output Devices C, D
1 Ω
2.4 Ω
Tj = 125°C (Fig.1)
R
DS(on)
V
F
V
jump
V
DB
V
CMOS
(*) The range of input voltages applied tothe VCM_CMD pin (with respectto V
deadband voltage (VDB) canbe expressed either in mV or in LSBs, where one LSBis equal to11.7mV.
(**) A condition in which the transfer characteristic (i.e., load current vs. VCM_CMD-V
desired value. The range of currents for which this condition exists is termed IJUMP. This current is referred o the VCM_CMD inputaccording
to the following equation: VJUMP = IJUMP x 3 x RSENSE
In this document, RSENSEis assumed to be2.01Ω. VJUMP can be expressed either in mV or in LSBs, where one LSBis equal to11.7mV.
(***) The value of VCM_CMD (with respect to V
offset is defined to be at the midpoint of the deadband region. RSENSE is assumed to br 2.01Ω.
VCM Current sense amplifier(I
V
off
Sink Out On Resistance Parking Device Tj = 125°C12Ω
Body Diode Forward Drop I = 0.3A 1.5 V
Jump Discontinuity (**) R
Deadband Discontinuity (*) R
Offset (***) R
) for which the load current is zero. In parts which exihibit a DEADBAND dicontinuity, the
REF
)
SENSE
Output Offset Voltage VCM_RS2 Shorted to GND O/Sis
= 2.01Ω 30 mV
sense
= 2.01Ω 6mV
sense
= 2.01Ω 40 mV
sense
) for which only negligible current is presentin the load. This
REF
) exhibits a slope which is significantly graterthan the
REF
–50 50 mV
V
(Isense)-Vref
G Closed Loop Voltage Gain 3V/V nominal 2.85 3.15 V/V
PSRR Power Supply RejectionRatio at DC 50 dB
BW Banwwidth 200 KHz
V
OR
Output Range VCC= 4.5V (note 4) –0.2 3.5 V
VCM Full waverectifying amplifier
I
B
I
imp
G Closed Loop Gain 0.320 0.347 V/V
PSRR Power Supply RejectionRatio at DC 50 dB
GBW Unity Gain Bandwidth 200 KHz
CMR Input Common ModeRange VCM_CMD pin 0.3 3.7 V
V
OR
6/15
Input Bias Current VCM_CMD = V
ref
Input Impedance Impedance seen at VCM_CMD
wrtV
ref
5KΩ
2 µA
Output Range 0 1 V

ELECTRICALCHARACTERISTICS (Continued)
VCM DAC (Notes5, 6)
Symbol Parameter Test Condition Min. Typ. Max. Units
Res Resolution 8 bit
N.L. Differential Nonlinearity ±0.5 LSB
I.N.L. Integral Nonlinearity ±0.5 LSB
CT Conversion Time From 50% pointof WR fallingto
2 µs
1% settling
Z
O
Output Z 100 Ω
FSTC Full Scale Temp. Coeff. 200 ppm/°C
V
OH
V
OL
V
ZSO
High Output Voltage Relative to V
Low OutputVoltage Relative to Vref Input Code = 80h –1.53 –1.47 V
Zero Scale Offset Relative to V
Input Code = 7Fh 1.46 1.52 V
ref
Input Code = 00 ±10 mV
ref
Over velocity detector,coil voltage sense amplifier
Symbol Parameter Test Condition Min. Typ. Max. Units
V
O
Output Offset Voltage VCM+ = VCM–, within input
common mode range.
Measure wrt to V
I
BC
Input Bias Current (Note 3) 10 µA
ref
G Closed Loop Voltage Gain Av = 0.25V/V nominal 0.242 0.258 V/V
PSRR Power Supply RejectionRatio at DC 50 dB
BW Bandwidth 200 KHz
CMR Input Common ModeRange Above and below these values
the op amp will be in saturation
and will not invert sign.
V
DR
V
OR
I
O
Input Differential Range 0 V
Output Range 0.3 3.5 V
Output Current æ400 µA
–50 +50 mV
0V
POWER
POWER
L6245
V
V
Over velocity detector,coil currentsense amplifier
Symbol Parameter Test Condition Min. Typ. Max. Units
V
O
Output Offset Voltage VCM_RS1 shorted to GND for:
(a) VCM_CMD < V
b) VCM_CMD > V
V
ref
and
ref
. Measure wrt
ref
G Closed Loop Voltage Gain Av = 2.5V/V nominal 2.425 2.575 V/V
PSRR Power Supply RejectionRatio at DC 50 dB
Bw Bandwidth 200 KHz
CMR Input Common ModeRange –0.1 2 V
V
R
I
O
Output Range 0.5 3.5 V
Output Current +400 mA
–50 +50 mV
7/15

L6245
ELECTRICALCHARACTERISTICS (Continued)
Over velocity detector,summingamplifier
Symbol Parameter Test Condition Min. Typ. Max. Units
V
O
I
BC
G Open Loop Gain 60 dB
PSRR Power Supply RejectionRatio at DC 50 dB
GBW Unity Gain Bandwidth 200 KHz
V
R
I
O
Over velocity detector,window comparator
Symbol Parameter Test Condition Min. Typ. Max. Units
t
S
V
TL
V
TH
Solenoidpre-driver (Note 7)
Symbol Parameter Test Condition Min. Typ. Max. Units
I
OH
Three phase sensorless motor driver
Input Offset Voltage 10 mV
Input Bias Current 1 µA
Output Range 0.5 3.5 V
Output Current +400 µA
Switching Time 50 µs
Low Threshold Relative to V
ref
–1.32 –1.18 V
High Threshold Relative to Vref 1.18 1.32 V
Output Current VOH= 1.5V, VCC= 4.4V 10 mA
Symbol Parameter Test Condition Min. Typ. Max. Units
Max. Load Current 0.5 A
Out OnResistance Tj= 125°C 0.75 Ω
R
I
O
DS(on)
dV/dt Slew Rate 0.05 V/µs
V
F
Body Diode Forward Drop I = 0.5A 1.2 V
Motor Current Sense Amplifier
Symbol Parameter Test Condition Min. Typ. Max. Units
I
BC
G Closed Loop Voltage Gain Low Gain mode
Input Bias Current 1 µA
High Gain mode
19.4
4.85
20.6
5.15
PSRR Power Supply RejectionRate at DC 50 dB
BW Bandwidth 200 KHz
I
O
Output Range 0 3.2 V
Spin DAC (Notes8, 9)
Symbol Parameter Test Condition Min. Typ. Max. Units
Res Resolution 8 bit
NL Differential Nonlinearity ±0.5 LSB
INL Integral Nonlinearity ±0.5 LSB
CT Conversion Time From 50% pointof –WR falling to
1% settling
Zo Output Z 14 KΩ
FSTC Full Scale Temp. Coeff. 200 ppm/°C
V
OH
V
OL
High Output Voltage 2.85 3.15 V
Low OutputVoltage Unloaded 0 20 mV
5 µs
V/V
V/V
8/15

ELECTRICALCHARACTERISTICS (Continued)
Step-upconverter
Symbol Parameter Test Condition Min. Typ. Max. Units
V
SU
Step-up Voltage Relative to V
CC
711V
Microprocessorinterface (Note 10)
Symbol Parameter Test Condition Min. Typ. Max. Units
V
IH
V
IL
V
OH
V
OL1
High Level Input Voltage 3 V
Low Level Input Voltage 0.8 V
High Level Output Voltage VCC = 5V, IOH= 400µA 4.4 V
Low Level Output Voltage –MCERR, –POR, –DTACK
0.4 V
IOL = 4mA
V
OL2
Low Level Output Voltage SYNT_ALL
0.4 V
IOL = 0.5mA
I
IN1
Input Leakage Current –RD, –WR, AS, –MC_CS,
1 µA
SYSCLK, A [0:2]
I
IN2
Input Leakage Current D [0:7] 10 µA
Microprocessorinterface timing
Trddh Read Data Hold 5 40 ns
Trddt –RD High to –DTACK high 40 ns
Twrdt –WR High to –DTACK High 40 ns
Power on reset
L6245
V
CCHL
V
CCHL
T
PLH
R
T
Notes:
1) The minimum voltage available from thebrushless DC motor after power has beenremoved is 2.7V
2) The voltage available for actuator etraction shall be greater than 0.7V.
3) Sum of I
4) Minimum output voltage is set to V
5) The VCM DAC shallbe monotonic over its full range.
6) The coding of thedigital input shall be 2’s complement.
7) The voltage available for solenoid operation shall be greater than 1.9V.
8) The Spin DAC shall be monotonicover its full range.
9) The coding of thedigital input shall be uniplar (unsigned binary).
10) SYNTH_HALL, MC_ERR, DTACKand POR shall have open drain (collector) outputs and internal pull-up resistors. The minimum value of
these pull-up resistors shall be 20KΩ..
FUNCTIONAL DESCRIPTION
Inside the systemis the sensorlessSpindle driver
(Spin), the Voice Coil Motor driver (VCM), the
Head load/unload predrivers, power sequencing,
actuator over-velocity detection, actuator retraction and dynamicbraking. The architecture of the
system is configured to interface directly to an 8
bit, parallel, microprocessorbus.
During the application of power to the system
(power-on),the outputdriversareheldin a disabled
state until the appliedvoltage reaches the Voltage
Good Threshold (VGT). During this period of time
the output driversare disabled,the internalregister
are set to predeterminedstates,and the Power On
VCCGood, HL VCCfalling 4.2 4.4 V
VCCGood, LH VCCrising 4.26 4.5 V
Rise Time C
= 100pF 200 ns
Load
Response Time 50 µs
/internal resistor + power leakage).
bias+(Vref
bya resistor network.
ref
Reset(POR) signal is held low. The PORsignal is
held low from the time the applied voltage
reaches 0.7V and the VGT. The POR delay is
programmable changing the value of a capacitor.
The VCM driver is drivenvia a D/Aand it can be
enabled through the VCM driver register. The
VCM driver has a gain capability too. This function is to be accomplishedby switchingthe sense
resistor used such that the current sensing feedback in the VCMdriver has more information and
therefore results in lower deadband, offset current, and gain error. An actuator over velocity
sensing circuit is incorporated in the system,
which is accomplished by measuring BEMF voltage and comparingto a threshold.
9/15

L6245
The head load /unload mechanisms are just buffers for driving external power transistors. Controlled internally by Bit 3 andBit 4 of the VCM Driver
Register,each output has a current surcing capability of 10mA.
The Sensorless Spindle Driver function can be
accessed from the microprocessor over the data
bus to the Spin Register and Spin D/A. The Spin
D/A is in Binary format.The operationof the Spindle system is controlled entirely by the microprocessor from start-up to speed regulaton. The spin
systemis accessibleby selecting the Spin Control
Register with the address 011 on the 3 bit addressbus andhas thefollowing functions:
1)Enable(Bit 0): high to enable the spin system, while a low asserts braking of the
spindle motor (if VCRenable is low.)
2)Sense amplifier gain (Bit 1): high implies
high current mode which is equivalentto
low sense amp gain, while a low selects
low current mode or high sense amp
gain.
3)Unipolar/Bipolar (Bit 2): High selects the
Unipolardriving mode.
4)Run/Search Mode (Bit 3): high selects the
run mode whereby the Hall synthesizer
output gives speed information while a low
asserts the search mode whereby the sequencer is under µP control (stepper function).
5)Reset State (Bit 4): a low level resets the
commutationstate sequencer.
6)Incrementalstate (Bit 5): toggling of the bit
increments the sequencer to drive the
output stage when search mode is selected.
7)Linear/PWM (Bit 6): high selects linear
mode of driving for current (speed) regulation while a low sets to PWM mode used
during start-up.
Start-up current limiting is accomplished by the
output of the microprocessor commanded D/A
value. Jammed or stuck rotor detection is also
done as part of the microprocessor algorithm. Integrated diode are present in the power bridge for
BEMF rectification. This rectified voltage is used
to retract the actuator and unload or latch the
head assembly.
A conventional Bandgap is used to generate internal biasing for the device as well as the referencevoltage for theD/A converters.
A Step-up Converter is used to generate a 15V
internal supply to drive the upper DMOSs and a
regulated 11.6V internal supply to power internal
circuits which have voltage head room problem,
aswell as to drive the lowerDMOSs.
A Low Voltage Detector (LVD) is incorporated to
sense a severely low value of applied voltage so
as to shunt-down the VCM and Spindle drivers.
The LVD is activated when the applied voltage
drops below 4.3V (+/-0.1V). When a voltage drop
issensed, the LVD:
1.assertsPOR,whichresetstheinternalregister;
2. retractsthe actuator;
3.applies thedynamic brake.
When a severe low value of applied voltage is
sensed, the motor control system goes into reset
mode and also asserts the POR line to reset
other circuits. The sub-circuit which get affected
bythe reset mode in the motor control system are
the Spin Control Register, the VCM Driver Register, the Spindle D/A and the VCM D/A. This effectively disables the spin driver, VCM driver, head
load/unloaddriver and initializes the D/A’s at zero
output command value.
An Over Velocity Detector circuit is integrated to
sense when head arms are moving at a speed
which could cause a damaging condition. When
an over velocity condition is detected sensing the
actuatorBEMF, the actuator driver is shut off and
held off until the microprocessorhas detectedthis
conditionand then resets the error and retries the
access.
The microprocessor has the possibility to put the
device in sleep mode, which is asserted when
both the VCM and Spindle drivers are disabled
through the internal registers (Enable VCM and
Enable Spindle). Under this condition, only the
POR circuit is kept ”alive”, thus power consumption is kept at minimal. Before sleepmode is activated, the microprocessor must move the actuator to the unload zone, unload the recording
heads, andapply dynamicbraking.
All bits of all the registersare readable by the microprocessorinterface. Also there are certainbits
of the internal registers which are writable as defined in the Register Definition Tables (Tables 1 -
7).
An internal register monitors the internal work of
the system and latchescertain error condition that
aredetected.
10/15

L6245
REGISTERDEFINITIONand3bit AddressCode
Table 1: Status Register (A.C.001)
Bit Name
NC
7
NC
6
NC
5
NC
4
REVERSE SPIN
3
OVER TEMP.
2
SPIN SENSE
1
OVER VEL SET
0
POR Initial
Value
1
1
0
1
Table 2: VCMDriver Register(A.C. 010)
Bit Name
NC
7
NC
6
NC
5
UNLOAD HD
4
LOAD HD
3
ENABLE ISENSE
2
HIGH GAIN VCM
1
ENABLE VCM
0
POR Initial
Value
0
0
0
0
0
Table 5: Spin D/ARegister (A.C. 101)
Bit Name
Most SignificantBit
7
6
5
4
3
2
1
0
Least Significant Bit
POR Initial
Value
0
0
0
0
0
0
0
0
Table 6: InterruptMask Register(A.C. 110)
Bit Name
NC
7
NC
6
NC
5
NC
4
NC
3
MASK REVSpin
2
MASKOVERTEMPERROR
1
MASK OVERVEL ERROR
0
POR Initial
Value
0
0
0
Table 3: Spin Control Register (A.C. 011)
Bit Name
NC
7
LINEAR/PWM
6
INCREMENT STATE
5
RESET STATE
4
RUN/SEARCH
3
UNI/BI
2
HIGH GAIN SPIN
1
ENABLE Spin
0
POR Initial
Value
Table 4: VCM D/A Register (A.C.100)
Bit Name
Most Significant Bit
7
6
5
4
3
2
1
0
Least Significant Bit
POR Initial
Value
Table 7: PhaseDelay Register (A.C. 111)
Bit Name
NC
7
NC
0
0
0
0
0
0
0
0
6
NC
5
NC
4
Most SignificantBit
3
2
1
Least Significant Bit
0
POR Initial
Value
0
0
0
0
SYSTEMBUS DESCRIPTION
The system bus is designed as a data acknowledge handshanking bus. At the beginning of the
bus cycle the address and chip select are decoded transparently and qualified with read or
write going low. On a read operation, data must
0
0
0
0
0
0
0
0
not be driven for 5nsec after read goes low to allow the bus to clear. Once datais driven,data acknowledge is driven low to notify the processor
that data is on the bus and ready to be read. The
processorreads thedata and respondsby raising
read. This is an indication that the processor has
compleated the read and cycle is complete. Data
acknowledge and data must go to high impedence within 20ns to clear the bus for the next
11/15

L6245
cycle. On a write operation, following write going
low and whatever setup time required to latch
data, data acknwledgeis driven low. This notifies
the processorthat thecycle canend. Thisprocessor responds by raising write, indicating the end
of the cycle. Data acknowledge must go to high
impedance within 20nsec to clear the bus for the
next cycle.
This handshaking design allows a peripheral to
controlthe lengthof the buscycle. The peripheral
Figure1: SystemBus Timing(see Table 8)
can take as much time as it needs to drive data
onto the bus, then drive DTACK low. Likewise,
the peripheral can wait as long as it needs to set
up data and latch it (or set up data if WRis used
to latch), then drive DTACK low. However, performance is an issue, so even though this control
has been given to the peripheral, it must not be
abused. All delays are minimized to assure optimum system speed, infact the bus can be driven
synchronously(E.G. has regarding DTACK) when
procesorclocks below 12MHz are used.
Table 8: System Bus Timing
Symbol Description
TAS Address SetupTime (nonMUX bus; (MUX bus)
TCS System Selectto Address Strobe
TASW Address StrobeWidth
TASRD Address Strobeto RD
TRDDV RD to Data Driven
TRDDH Read Data Hold
TRDCS RD High to CS High
TDVDT Data Valid toDTACK
TDTRD DTACK to RD High
TRDDT RD Highto DTACH High
TASWR Address Strobeto WR
TDVWR Write Data Validto WR
TWRDTL WR to DTACK
TDTWR DTACK toWR High
TWRCS WR High to CS High
TWRDT WR Highto DTACKHigh
TWRDH Write Data Hold
12/15

L6245
THERMAL CHARACTERISTICS
On the application, the L6245 must be soldered
on a PCB system. The Traks Area, dependingon
the lenght and the width of each track, must be
between 2 to 10 square mm. An area of 10 mm
can give a typ. Thermal Resistance Junction-toAmbient value of 85°C/W (See Fig. 2): this value
refer3 to a Total Power Dissipated Power of 1W.
Figure2: TypicalR
vs. Tracks Area on PCB
th j-amb
Fig. 9 shows the increase of the Rth j-amb when
the Dissipated Power decreases.
Practically, very useful information is the change
of the thermal resistance (Thermal Impedance)
2
versusa singlepulse of powerwidth or versusthe
time the dissipationbegins.
Fig.4 showsthis Thermal Impedancetrend.
Figure3: TypicalJunction-to-AmbientThermal
Resistancevs. Total Dissipated
Power.(L6245 mounted on atypical
PCB)
Figure4: TypicalTransientThermal Impedance
vs. Time orPulse Width.(L6245
mountedon a typical PCB)
13/15

L6245
PQFP64PACKAGE MECHANICAL DATA
DIM.
mm inch
MIN. TYP. MAX. MIN. TYP. MAX.
A 3.40 0.134
A1 0.25 0.010
A2 2.55 2.80 3.05 0.100 0.110 0.120
B 0.30 0.45 0.0118 0.0177
C 0.13 0.23 0.005 0.009
D 16.95 17.20 17.45 0.667 0.677 0.687
D1 13.90 14.00 14.10 0.547 0.551 0.555
D3 12.00 0.472
e 0.80 0.0315
E 16.95 17.20 17.45 0.667 0.677 0.687
E1 13.90 14.00 14.10 0.547 0.551 0.555
E3 12.00 0.472
K 0°(min.), 7°(max.)
L 0.65 0.80 0.95 0.026 0.0315 0.0374
L1 1.60 0.063
D
D1
PQFP64
3348
32
E3D3E1
17
16
E
L1
L
K
0.10mm
Seating Plane
49
B
64
1
e
A1
A
A2
B
C
14/15

L6245
Information furnished is believed to be accurate and reliable. However, SGS-THOMSON Microelectronics assumes no responsibility for the
consequences of use of such information nor forany infringement of patents or otherrights of third parties which may result from its use. No
license is granted by implication or otherwise under any patent or patent rights of SGS-THOMSON Microelectronics. Specifications mentioned in this publication are subject to change withoutnotice. This publication supersedes and replaces all informationpreviously supplied.
SGS-THOMSON Microelectronics products are not authorized for use as critical components in life support devices or systems without express written approval of SGS-THOMSON Microelectronics.
1994 SGS-THOMSON Microelectronics - All RightsReserved
SGS-THOMSON Microelectronics GROUP OF COMPANIES
Australia - Brazil - France - Germany -Hong Kong - Italy - Japan - Korea -Malaysia - Malta - Morocco - The Netherlands - Singapore -
Spain - Sweden - Switzerland - Taiwan - Thaliand - United Kingdom - U.S.A.
15/15
 Loading...
Loading...