

SG-MOTOMAN NX100 User Manual
NX100
使用说明书
请务必确保本使用说明书到达本产品的最终使用者手中。
MOTOMAN 使用说明书一览
MOTOMAN- 机器人使用说明书
NX100 使用说明书
NX100 操作要领书
NX100 维护保养要领书
SG-MOTOMAN
NX100 操作要领书根据用途不同内容有异,
请确认与用途是否相同
SGM
SG-MOTOMAN
资料编号: SGM-CTO-A211
ᔎࠊ
• 本说明书对 NX100 的示教、再现、程序及文件编辑操作、作业管理等内容进行了全面的说
明。请务必在认真阅读并充分理解的基础上操作机器人。
• 另外,有关安全的一般事项,在 《NX100 使用说明书》的 “1 安全”中有详细描述,阅读
本说明书前请务必熟读,以确保正确使用。
• 说明书中的图解,有的为了说明细节取下盖子或安全罩进行绘制,运转此类部件时,务必
按规定将盖子或安全罩还原后,再按说明书要求运转。
• 说明书中的图及照片,为代表性示例,可能与所购买产品不同。
• 说明书有时由于产品改进、规格变更及说明书自身更便于使用等原因而进行适当的修改。
修改后的说明书将更新封面右下角的资料号,并以修订版发行。
• 由于破损、丢失等原因需订购说明书时,请与本公司销售部联系,按封面的资料号订购。
• 客户擅自进行产品改造,不在本公司保修范围之内,本公司概不负责。
ii
安全注意事项
使用前 (安装、运转、保养、检修),请务必熟读并全部掌握本说明书和其他附属资料,在熟
知全部设备知识、安全知识及注意事项后再开始使用。
本说明书中的安全注意事项分为 “危险”、“注意”、“强制”、“禁止”四类分别记载。
误操作时有危险,可能发生死亡或重伤事故。
误操作时有危险,可能发生中等程度伤害、轻伤事故或物件损
坏。
ᔎࠊ
⽕ℶ
即使是属于 “注意”类的事项,也会因情况不同而产生严重后果,故任何一条 “注意”事项
都极为重要,请务必严格遵守。 .
虽然不符合 “注意”或 “危险”的内容,但为了确保安全和有效的操作,用户也必须遵守
的事项,将会在相关处加以叙述。
必须遵守的事项
禁止的事项
iii
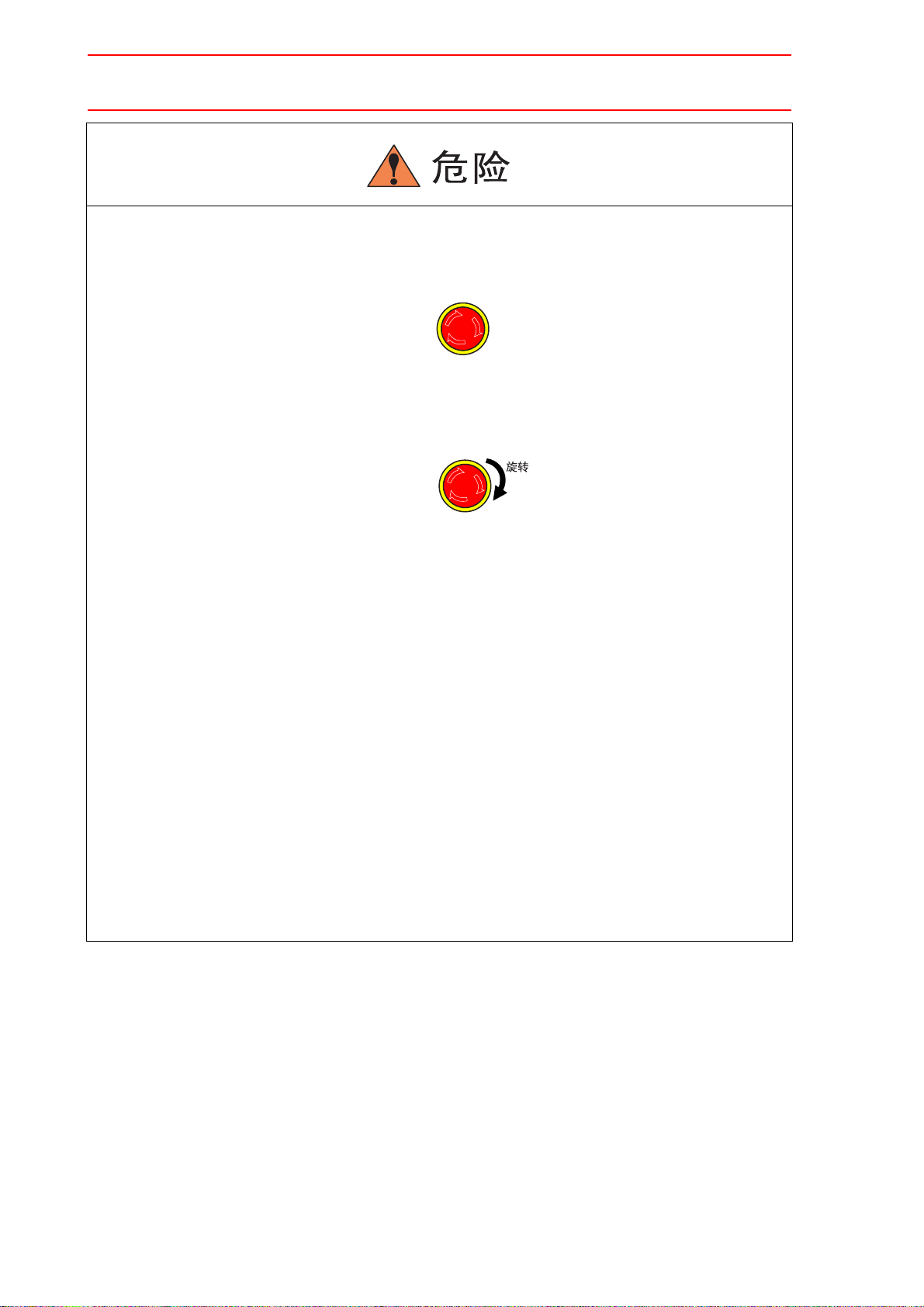
• 操作机器人前,按下 NX100 前门及示教编程器上的急停键,并确认伺服电源被切断。伺服
电源切断后,示教编程器上的伺服通的灯熄灭。
紧急情况下,若不能及时制动 机器人,则可能引发人身伤害或设备损坏事故。
急停键
• 解除急停后再接通伺服电源时,要解除造成急停的事故后再接通伺服电源。
由于误操作造成的机器人动作,可能引发人身伤害事故。
急停状态解除
• 在机器人动作范围内示教时,请遵守以下事项:
- 保持从正面观看机器人。
- 遵守操作步骤。
- 考虑机器人突然向自己所处方位运动时的应变方案。
- 确保设置躲避场所,以防万一。
由于误操作造成的机器人动作,可能引发人身伤害事故。
• 进行以下作业时,请确认机器人的动作范围内没人,并且操作者处于安全位置操作:
- NX100 接通电源时。
- 用示教编程器操作机器人时。
- 试运行时。
- 自动再现时。
不慎进入机器人动作范围内或与机器人发生接触,都有可能引发人身伤害事故。另外,发
生异常时,请立即按下急停键。
急停键位于 NX100 前门及示教编程器的右侧。
iv
• 进行机器人示教作业前要检查以下事项,有异常则应及时修理或采取其他必要措施。
- 机器人动作有无异常。
- 外部电线遮盖物及外包装有无破损。
• 示教编程器用完后须放回原处。
如不慎将示教编程器放在机器人、夹具或地上,当机器人运动时,示教编程器可能与机器
人或夹具发生碰撞,从而引发人身伤害或设备损坏事故。
• 在理解 NX100 使用说明书的 “警告标志”的基础上,使用机器人。
本书常用词汇定义
“MOTOMAN”是安川电机工业机器人的商品名。
MOTOMAN 由机器人本体 “机器人”、机器人控制柜 “NX100”、“NX100 示教编程器”和 “供电
电缆”构成。
在本书中,这些部分如下表表示。
设 备 本 书 表 示 法
NX100 控制柜 NX100
NX100 示教编程器 示教编程器
机器人与控制柜间的电缆 供电电缆
v
另外,示教编程器的键、按钮、画面的表示方法如下所示:
操作设备 本书表示方法
示教编程器
文字键 文字键名用 [ ]表示。
例: [ 回车 ]
图形键 图形键不用 [ ] ,在键名后直接用图形表示。
例:翻页键
GO BACK
PAGE
只有光标键例外,不用图形表示。
轴操作键和数
值键
轴操作键、数值键总体称呼时,分别称作轴操作键、
数值键。
同时按键 同时按两个键时,如[转换 ]+[坐标]键,在两个键
之间加上 “+”号。
画面 画面中的菜单用 { }表示。
例:{程序 }
操作步骤的表达方式的定义
操作步骤的说明中,“选择 • • • ”表示的操作方法,是把光标移到选择对象上,再按 [ 选择 ]
键。
vi
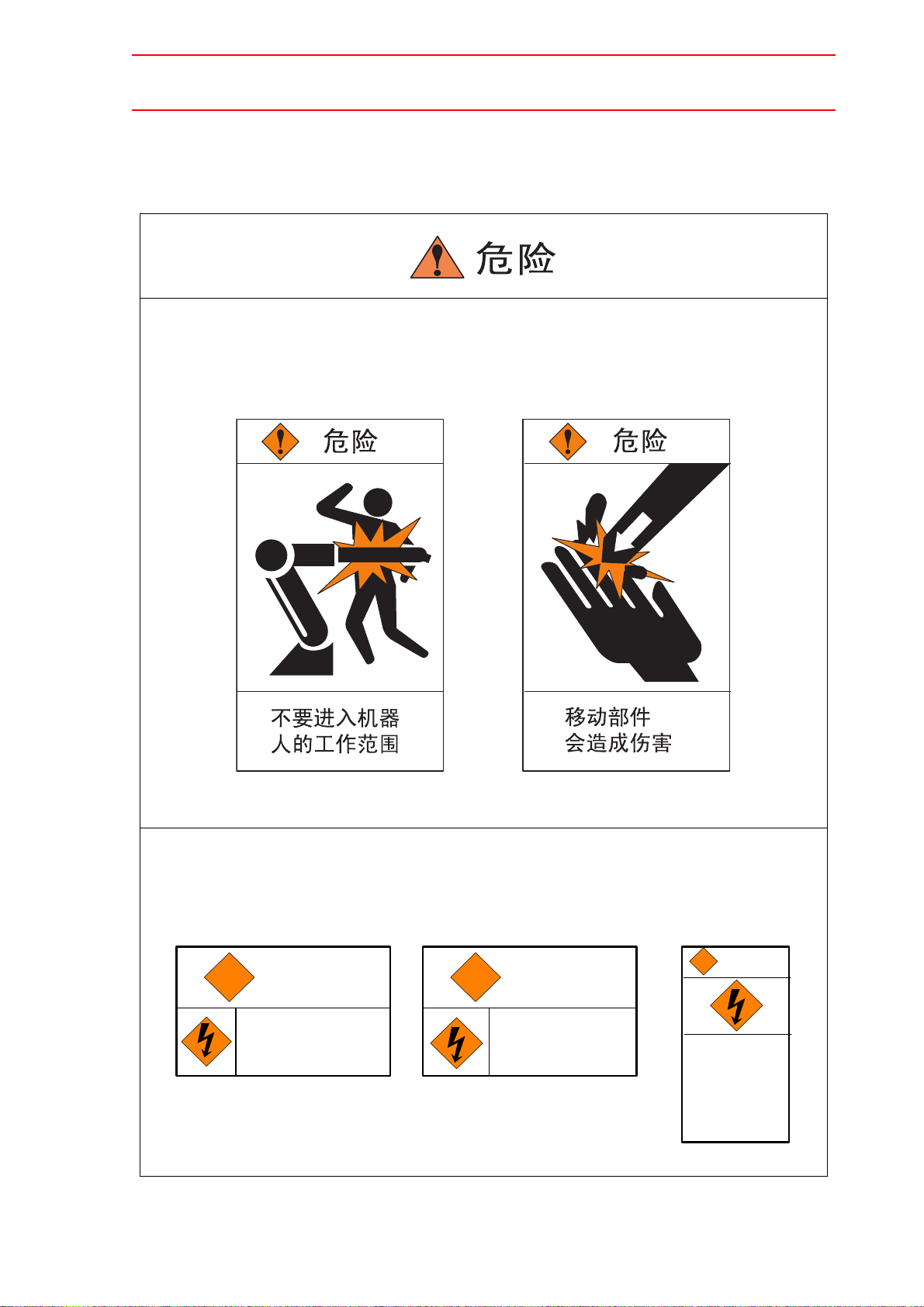
警示牌的说明
下列警示牌牌贴在机器人及 NX100 上。
要完全遵照警示牌执行。
• 下列的警示牌牌贴在机器人上。
遵照警示牌执行。
忽视此警示可能会造成人身伤害和设备损坏。
这些警示牌的固定位置参见机器人使用说明书。
• 下列的警示牌贴在
遵照警示牌执行。
忽视此警示可能会造成人身伤害和设备损坏。
!
高压
电源接通时不要打开
柜门
这些警示牌的固定位置参见
NX100 上。
危险
!
NX100 使用说明书。
vii
危险
高压
不要打开盖子
危险
!
要接地
否则有触电危险

1 安全
1.1 保障安全 . . . . . . . . . . . . . . . . . . . . . . . . 1-1
1.2 专门培训. . . . . . . . . . . . . . . . . . . . . . . . 1-3
1.3 机器人使用说明书清单 . . . . . . . . . . . . . . . . 1-3
1.4 操作人员安全注意事项 . . . . . . . . . . . . . . . . 1-4
1.5 机器人的安全注意事项 . . . . . . . . . . . . . . . . 1-6
1.6 移动及转让机器人的注意事项 . . . . . . . . . . . 1-14
1.7 废弃机器人的注意事项. . . . . . . . . . . . . . . 1-15
2 产品确认
1.5.1 安装及配线安全 . . . . . . . . . . . . . . . . . . . . 1-6
1.5.2 作业区安全 . . . . . . . . . . . . . . . . . . . . . 1-10
1.5.3 操作安全 . . . . . . . . . . . . . . . . . . . . . . 1-11
3 安装
4 配线
2.1 装箱内容确认 . . . . . . . . . . . . . . . . . . . . . 2-1
2.2 订货号确认 . . . . . . . . . . . . . . . . . . . . . . 2-2
3.1 搬运方法. . . . . . . . . . . . . . . . . . . . . . . . 3-1
3.1.1 用吊车搬运控制柜 . . . . . . . . . . . . . . . . . . . 3-1
3.1.2 用叉车搬运控制柜 . . . . . . . . . . . . . . . . . . . 3-2
3.2 安装场所和环境 . . . . . . . . . . . . . . . . . . . . 3-2
3.3 安装位置. . . . . . . . . . . . . . . . . . . . . . . . 3-3
3.4 安装方法. . . . . . . . . . . . . . . . . . . . . . . . 3-5
4.1 电缆连接的注意事项 . . . . . . . . . . . . . . . . . 4-2
4.2 供电电源. . . . . . . . . . . . . . . . . . . . . . . . 4-3
4.2.1 三相电源 . . . . . . . . . . . . . . . . . . . . . . . 4-3
4.2.2 噪声滤波器的安装 . . . . . . . . . . . . . . . . . . . 4-4
4.2.3 漏电断路器的安装 . . . . . . . . . . . . . . . . . . . 4-4
4.2.4 一次侧电源开关的安装 . . . . . . . . . . . . . . . . . 4-5
4.3 连接方法. . . . . . . . . . . . . . . . . . . . . . . . 4-6
4.3.1 一次侧电源的连接 . . . . . . . . . . . . . . . . . . . 4-6
4.3.2 连接供电电缆 . . . . . . . . . . . . . . . . . . . . 4-10
4.3.3 连接示教编程器 . . . . . . . . . . . . . . . . . . . 4-11
viii

5 电源的接通与切断
5.1 接通主电源 . . . . . . . . . . . . . . . . . . . . . . .5-1
5.1.1 初始化诊断 . . . . . . . . . . . . . . . . . . . . . .5-2
5.1.2 初始化诊断完成时的状态 . . . . . . . . . . . . . . . .5-2
5.2 接通伺服电源. . . . . . . . . . . . . . . . . . . . . .5-3
5.2.1 再现模式时 . . . . . . . . . . . . . . . . . . . . . .5-3
5.2.2 示教模式时 . . . . . . . . . . . . . . . . . . . . . .5-3
5.3 切断电源 . . . . . . . . . . . . . . . . . . . . . . . .5-5
5.3.1 切断伺服电源 ( 急停 ) . . . . . . . . . . . . . . . . . .5-5
5.3.2
切断主电源 . . . . . . . . . . . . . . . . . . . . . .5-5
6 动作确认
6.1 轴的动作 . . . . . . . . . . . . . . . . . . . . . . . .6-3
ix

7 系统升级概要
8 安全系统
8.1 根据安全模式设定的保护. . . . . . . . . . . . . . . 8-1
8.1.1 安全模式 . . . . . . . . . . . . . . . . . . . . . . . 8-1
安全模式的变更 . . . . . . . . . . . . . . . . . . . 8-5
8.1.2 用户口令 . . . . . . . . . . . . . . . . . . . . . . . 8-6
用户口令的变更 . . . . . . . . . . . . . . . . . . . 8-6
系统升级
9 系统设定
9.1 原点位置校准 . . . . . . . . . . . . . . . . . . . . . 9-1
9.2 设定第二原点位置 ( 检查点 ) . . . . . . . . . . . . 9-8
9.3 时间的设定 . . . . . . . . . . . . . . . . . . . . . 9-14
9.4 设定再现速度 . . . . . . . . . . . . . . . . . . . . 9-15
9.5 解除全部极限功能. . . . . . . . . . . . . . . . . . 9-16
9.6 解除超程 / 解除防碰撞传感器 . . . . . . . . . . . 9-18
9.7 干涉区 . . . . . . . . . . . . . . . . . . . . . . . . 9-20
9.1.1 原点位置校准 . . . . . . . . . . . . . . . . . . . . . 9-2
9.1.2 操作方法 . . . . . . . . . . . . . . . . . . . . . . . 9-3
进行全轴登录 . . . . . . . . . . . . . . . . . . . . 9-3
进行各轴单独登录 . . . . . . . . . . . . . . . . . . 9-4
变更绝对原点数据 . . . . . . . . . . . . . . . . . . 9-5
清除绝对原点数据 . . . . . . . . . . . . . . . . . . 9-6
9.1.3 机器人的原点位置姿态 . . . . . . . . . . . . . . . . . 9-7
9.2.1 操作目的 . . . . . . . . . . . . . . . . . . . . . . 9-10
9.2.2 第二原点位置 ( 位置点 ) 的设定方法. . . . . . . . . . 9-12
9.2.3 报警后的处置 . . . . . . . . . . . . . . . . . . . . 9-13
9.7.1 干涉区 . . . . . . . . . . . . . . . . . . . . . . . 9-20
9.7.2 立方体干涉区 . . . . . . . . . . . . . . . . . . . . 9-20
立方体干涉区 . . . . . . . . . . . . . . . . . . . 9-20
设定方法的种类 . . . . . . . . . . . . . . . . . . 9-21
设定操作 . . . . . . . . . . . . . . . . . . . . . 9-22
9.7.3 轴干涉区 . . . . . . . . . . . . . . . . . . . . . . 9-27
轴干涉区 . . . . . . . . . . . . . . . . . . . . . 9-27
设定操作 . . . . . . . . . . . . . . . . . . . . . 9-27
9.7.4 干涉区的数据清除 . . . . . . . . . . . . . . . . . . 9-30
x

9.8 作业原点位置. . . . . . . . . . . . . . . . . . . . . 9-31
9.8.1 作业原点 . . . . . . . . . . . . . . . . . . . . . . 9-31
9.8.2 设置作业原点 . . . . . . . . . . . . . . . . . . . . 9-31
作业原点位置的显示 . . . . . . . . . . . . . . . . 9-31
作业原点的输入 / 变更 . . . . . . . . . . . . . . . 9-32
回到作业原点位置 . . . . . . . . . . . . . . . . . 9-32
作业原点信号的输出 . . . . . . . . . . . . . . . . 9-32
9.9 工具尺寸的设定 . . . . . . . . . . . . . . . . . . . 9-33
9.9.1 工具文件的登录 . . . . . . . . . . . . . . . . . . . 9-33
工具文件的个数 . . . . . . . . . . . . . . . . . . 9-33
输入坐标值 . . . . . . . . . . . . . . . . . . . . 9-33
输入工具姿态数据 . . . . . . . . . . . . . . . . . 9-36
设定工具重量信息 . . . . . . . . . . . . . . . . . 9-37
9.9.2 工具校验. . . . . . . . . . . . . . . . . . . . . . . 9-38
工具校验 . . . . . . . . . . . . . . . . . . . . . 9-38
示教 . . . . . . . . . . . . . . . . . . . . . . . 9-38
校验数据的清除 . . . . . . . . . . . . . . . . . . 9-42
控制点的确认 . . . . . . . . . . . . . . . . . . . 9-43
9.9.3 工具重量和重心自动测定功能 . . . . . . . . . . . . . 9-44
关于工具负量和重心自动测定功能 . . . . . . . . . . 9-44
重量、重心位置的测定 . . . . . . . . . . . . . . . 9-44
9.10 用户坐标的设定 . . . . . . . . . . . . . . . . . . 9-48
9.10.1 用户坐标 . . . . . . . . . . . . . . . . . . . . . . 9-48
用户坐标的定义 . . . . . . . . . . . . . . . . . . 9-48
用户坐标文件个数 . . . . . . . . . . . . . . . . . 9-48
9.10.2 用户坐标的设定 . . . . . . . . . . . . . . . . . . . 9-49
用户坐标文件的选择 . . . . . . . . . . . . . . . . 9-49
用户坐标的示教 . . . . . . . . . . . . . . . . . . 9-50
用户坐标数据的清除 . . . . . . . . . . . . . . . . 9-52
9.11 ARM 控制的设定. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9-53
9.11.1 ARM 控制 . . . . . . . . . . . . . . . . . . . . . . 9-53
9.11.2 ARM 控制设定画面 . . . . . . . . . . . . . . . . . . 9-53
机器人设置条件 . . . . . . . . . . . . . . . . . . 9-54
设定操作 . . . . . . . . . . . . . . . . . . . . . 9-57
9.11.3 设定工具重量信息 . . . . . . . . . . . . . . . . . . 9-58
工具重量信息 . . . . . . . . . . . . . . . . . . . 9-58
计算工具重量信息的方法 . . . . . . . . . . . . . . 9-58
登录工具重量信息 . . . . . . . . . . . . . . . . . 9-65
9.12 碰撞检测功能 . . . . . . . . . . . . . . . . . . . 9-67
9.12.1
9.12.2
碰撞检测功能 . . . . . . . . . . . . . . . . . . . 9-67
设定碰撞检测功能 . . . . . . . . . . . . . . . . . 9-67
检测等级的设定 . . . . . . . . . . . . . . . . . . . 9-67
工具重量信息的设定. . . . . . . . . . . . . . . . . 9-70
碰撞检测功能的命令 . . . . . . . . . . . . . . . . . 9-72
碰撞检测状态的复位 . . . . . . . . . . . . . . . . . 9-77
xi

9.13 命令显示等级的设定 . . . . . . . . . . . . . . . 9-78
9.13.1 显示项目 . . . . . . . . . . . . . . . . . . . . . 9-78
命令集 . . . . . . . . . . . . . . . . . . . . . . 9-78
命令的学习功能 . . . . . . . . . . . . . . . . . . 9-79
9.13.2 命令集的设定操作 . . . . . . . . . . . . . . . . . 9-80
9.14 数值键的用户化功能 . . . . . . . . . . . . . . . 9-81
9.14.1 关于数值键的用户化功能 . . . . . . . . . . . . . . 9-81
9.14.2 定义功能 . . . . . . . . . . . . . . . . . . . . . 9-81
单独键定义 . . . . . . . . . . . . . . . . . . . . 9-81
同时按键定义 . . . . . . . . . . . . . . . . . . . 9-82
9.14.3 键定义的操作方法 . . . . . . . . . . . . . . . . . 9-83
键定义画面 . . . . . . . . . . . . . . . . . . . . 9-83
命令定义 . . . . . . . . . . . . . . . . . . . . . 9-84
程序调用定义 . . . . . . . . . . . . . . . . . . . 9-86
显示定义 . . . . . . . . . . . . . . . . . . . . . 9-87
交替输出定义 . . . . . . . . . . . . . . . . . . . 9-88
瞬间输出定义 . . . . . . . . . . . . . . . . . . . 9-89
脉冲输出定义 . . . . . . . . . . . . . . . . . . . 9-89
(4 位 /8 位 ) 输出组定义 . . . . . . . . . . . . . . 9-90
模拟输出定义 . . . . . . . . . . . . . . . . . . . 9-91
模拟增量输出定义 . . . . . . . . . . . . . . . . . 9-92
9.14.4 I/O 控制命令的定义. . . . . . . . . . . . . . . . . 9-93
9.14.5 定义的执行 . . . . . . . . . . . . . . . . . . . . 9-95
命令 / 输出控制定义的执行 . . . . . . . . . . . . . 9-95
程序调用定义的执行 . . . . . . . . . . . . . . . . 9-95
显示定义的执行 . . . . . . . . . . . . . . . . . . 9-95
I/O 控制定义的执行 . . . . . . . . . . . . . . . . 9-95
9.15 输出状态的修改 . . . . . . . . . . . . . . . . . . 9-96
9.16 暂时解除软极限功能 . . . . . . . . . . . . . . . 9-98
9.17 参数的变更. . . . . . . . . . . . . . . . . . . . . 9-99
9.18 文件初始化. . . . . . . . . . . . . . . . . . . . . 9-101
9.18.1 程序初始化 . . . . . . . . . . . . . . . . . . . . 9-101
9.18.2 条件文件初始化 . . . . . . . . . . . . . . . . . . 9-102
9.18.3 参数初始化 . . . . . . . . . . . . . . . . . . . . 9-103
9.18.4 I/O 数据初始化. . . . . . . . . . . . . . . . . . . 9-104
9.18.5 系统数据初始化 . . . . . . . . . . . . . . . . . . 9-105
10 系统配置的修改
10.1 追加 I/O 单元 . . . . . . . . . . . . . . . . . . . 10-1
10.2 追加基座轴和工装轴 . . . . . . . . . . . . . . . 10-4
10.2.1 基座轴的设定 . . . . . . . . . . . . . . . . . . . 10-7
10.2.2 工装轴的设定 . . . . . . . . . . . . . . . . . . . 10-15
xii

11 NX100 技术规范
11.1 NX100 的技术规格 . . . . . . . . . . . . . . . . . 11-2
11.2 NX100 的功能 . . . . . . . . . . . . . . . . . . . . 11-3
11.3 示教编程器 . . . . . . . . . . . . . . . . . . . . . 11-4
11.4 设备配置 . . . . . . . . . . . . . . . . . . . . . . 11-5
11.4.1 单元及基板的配置 . . . . . . . . . . . . . . . . . . 11-5
配置 . . . . . . . . . . . . . . . . . . . . . . . 11-5
11.4.2 控制柜内的冷却系统 . . . . . . . . . . . . . . . . . 11-7
12 单元及基板的说明
12.1 电源接通单元. . . . . . . . . . . . . . . . . . . . 12-2
12.2 电源接通顺序基板 (JANCD-NTU01-) . . . . . . . 12-4
防碰撞传感器的连接 (SHOCK) . . . . . . . . . . . . . 12-4
外部轴超程信号的连接 (EXOT) . . . . . . . . . . . . 12-6
伺服接通可能输入信号的连接 (ON_EN1 和 ON_EN2) . . . 12-7
12.3 CPU 单元. . . . . . . . . . . . . . . . . . . . . . . 12-8
12.3.1 CPU 单元的构成 . . . . . . . . . . . . . . . . . . . 12-8
12.3.2 CPU 单元中的组件及基板 . . . . . . . . . . . . . . . 12-9
控制基板 (JANCD-NCP01) . . . . . . . . . . . . . . 12-9
控制电源 (CPS-420F) . . . . . . . . . . . . . . . . 12-9
WAGO 插座配线要领 . . . . . . . . . . . . . . . . .12-11
轴控制基板 (SGDR-AXA01A) . . . . . . . . . . . . .12-12
机器人 I/F 单元 (JZNC-NIF01) . . . . . . . . . . . .12-12
机器人通用输入 / 输出插座的连接 (CN07, 08, 09, 10) .12-13
有关启动、停止的输入 / 输 出信号 . . . . . . . . . .12-14
输入 / 输出用外部电源的连接方法 . . . . . . . . . .12-16
机器人专用输入端子台 (MXT) . . . . . . . . . . . .12-17
外部急停 . . . . . . . . . . . . . . . . . . . . .12-17
安全插销 . . . . . . . . . . . . . . . . . . . . .12-18
维护输入 . . . . . . . . . . . . . . . . . . . . .12-20
全速试运行 . . . . . . . . . . . . . . . . . . . .12-20
安全速度模式的选择 . . . . . . . . . . . . . . . .12-21
外部伺服电源接通 . . . . . . . . . . . . . . . . .12-21
外部暂停 . . . . . . . . . . . . . . . . . . . . .12-22
外部安全开关 . . . . . . . . . . . . . . . . . . .12-23
直接输入 1 ~ 4 ( 选项 ) . . . . . . . . . . . . . .12-23
直接输入 ( 伺服 ) 1 ~ 5. . . . . . . . . . . . . . .12-24
12.4 急停键的触点输出 . . . . . . . . . . . . . . . . .12-27
xiii

12.5 伺服单元 . . . . . . . . . . . . . . . . . . . . . . 12-28
12.5.1 各个单元的说明 . . . . . . . . . . . . . . . . . . 12-28
整流器 . . . . . . . . . . . . . . . . . . . . . . 12-28
放大器 . . . . . . . . . . . . . . . . . . . . . . 12-28
12.5.2 伺服单元的构成 . . . . . . . . . . . . . . . . . . 12-28
12.6 通用输入 / 输出信号分配 . . . . . . . . . . . . . 12-32
12.6.1 弧焊 . . . . . . . . . . . . . . . . . . . . . . . 12-32
12.6.2 搬运 . . . . . . . . . . . . . . . . . . . . . . . 12-38
12.6.3 通用用途 . . . . . . . . . . . . . . . . . . . . . 12-44
12.6.4 点焊. . . . . . . . . . . . . . . . . . . . . . . . 12-50
12.6.5 JANCD-XEW02 基板 ( 标准 ) . . . . . . . . . . . . . 12-58
弧焊 . . . . . . . . . . . . . . . . . . . . . . . 12-58
xiv

1.1 保障安全
1 安全
1.1 保障安全
机器人与其他机械设备的要求通常不同 , 如它的大运动范围、 快速的操作、手臂的快速运动
等,这些都会造成安全隐患。
阅读和理解使用说明书及相关的文件,并遵循各种规程,以免造成人身伤害或设备事故。用户
有责任保证其安全的操作环境符合和遵守地方及国家有关安全性的法令、法规及条例。
1-1
1.1 保障安全
• 机器人的示教维护必须遵照下列法规 :
- 有关工业安全和健康的法律。
- 有关工业安全和健康法律的强制性命令。
- 有关工业安全和健康法律的相应条例。
其他有关法律是 :
- 美国的职业安全与健康法。
- 德国的工厂法。
- 英国的工作安全与健康法。
- 欧盟的 89/392 机械行业指令和欧共体的 91/368 。
• 准备
- 安全技术规则
根据符合有关法规的具体政策进行安全管理。
• 遵守
- 工业机器人的安全操作 (ISO 10218)。
机器人的安全操作 ( 仅限日本 ) (JIS B 8433)。
• 增补
- 安全管理系统
指定授权的操作者及安全管理人员,并给予进一步的安全教育。
• 示教和维修机器人的工作被列入工业安全和健康法律中的 “危险操作”。
( 仅限中国 )
操作人员需参加由首钢莫托曼机器人有限公司提供的专门培训。
1-2
1.2 专门培训
• 示教和维护机器人的人员必须事先经过培训。
• 关于培训的更多信息请咨询首钢莫托曼机器人有限公司。
1.3 机器人使用说明书清单
1.2 专门培训
• 拥有并熟悉有关机器人的所有说明书是至关重要的。
您应具有下列说明书 :
-MOTOMAN- 机器人使用说明书
-NX100 使用说明书
-NX100 操作要领书
确认您拥有上述所有说明书。
如缺少上述任何说明书 , 请通过销售人员与首钢莫托曼机器人有限公司联系 。
1-3
1.4 操作人员安全注意事项
1.4 操作人员安全注意事项
整个机器人的最大动作范围内均具有潜在的危险性。
为机器人工作的所有人员 ( 安全管理员、安装人员、操作人员和维修人员 ) 必须时刻树立安全
第一的思想 , 以确保所有人员的安全。
• 机器人的安装区域内禁止进行任何的危险作业。
如任意触动机器人及其外围设备,将会有造成伤害的危险。
• 请采取严格的安全预防措施 , 在工厂的相关区域内应安放 , 如“易燃”、“高压”、“止步”
或 “闲人免进”等相应警示牌。
忽视这些警示可能会引起火警、电击或由于任意触动机器人和其他设备会造成伤害。
严格遵守下列条款:
- 穿着工作服 ( 不穿宽松的衣服 )。
- 操作机器人时不许戴手套。
- 内衣裤、衬衫和领带不要从工作服内露出。
- 不佩戴大的首饰,如耳环、戒指或垂饰等。
必要时穿戴相应的安全防护用品,如安全帽、安全鞋 ( 带防滑底的 )、面罩、防护镜和手
套。
不合适的衣服可能会造成人身伤害。
• 未经许可的人员不得接近机器人和其外围的辅助设备。
不遵守此提示可能会由于触动 NX100 控制柜、工件、定位装置等而造成伤害。
1-4
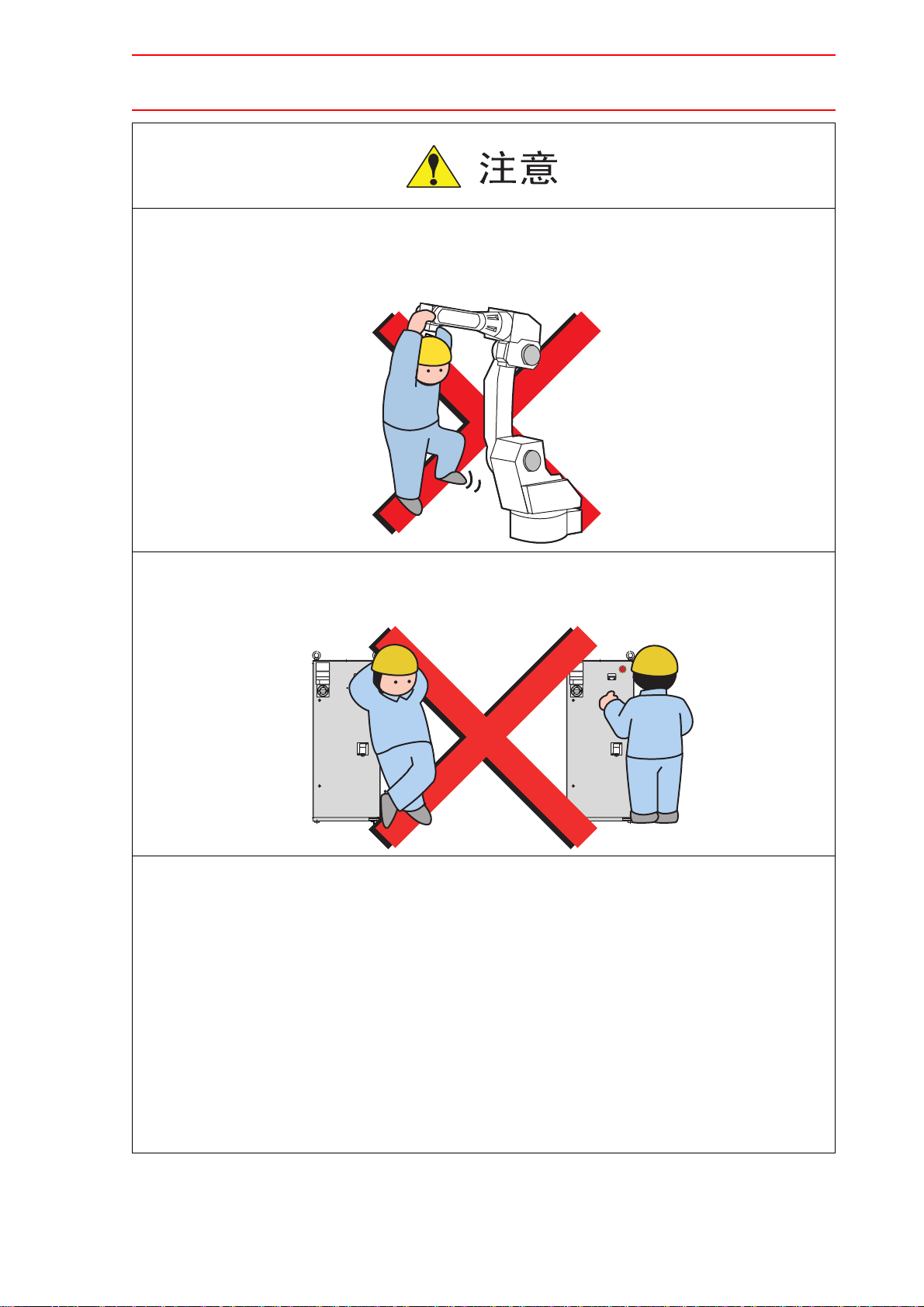
• 绝不要强制地扳动机器人的轴。
否则可能会造成人身伤害和设备损坏。
1.4 操作人员安全注意事项
• 绝不要倚靠在 NX100 或其他控制柜上;不要随意地按动操作键。
否则可能会造成机器人产生未预料的动作,从而引起人身伤害和设备损坏。
O
N
ESET
R
O
N
ET
ES
R
• 在操作期间,绝不允许非工作人员触动 NX100。
否则可能会造成机器人产生未预料的动作,从而引起人身伤害和设备损坏。
1-5
1.5 机器人的安全注意事项
1.5 机器人的安全注意事项
1.5.1 安装及配线安全
安装和配线时从 MOTOMAN- 机器人使用说明书和 NX100 使用说明书中查阅详细资料,
在计划性的安装中,制定易行的措施来保证安全。当规划安装时,要考虑到安全性。当安装机
器人时,要遵守下列事项:
• 选择一个区域安装机器人,并确认此区域足够大,以确保装有工具的机器人转动时不会碰
着墙、安全围栏或控制柜。
否则可能会因机器人产生未预料的动作而引起人身伤害或设备损坏。
1000 mm
1000 mm
1000 mm
• 接地工程要遵守电气设备标准及内线规章制度。
否则会有触电、火灾的危险。
NX100
1000 mm
1-6
1.5 机器人的安全注意事项
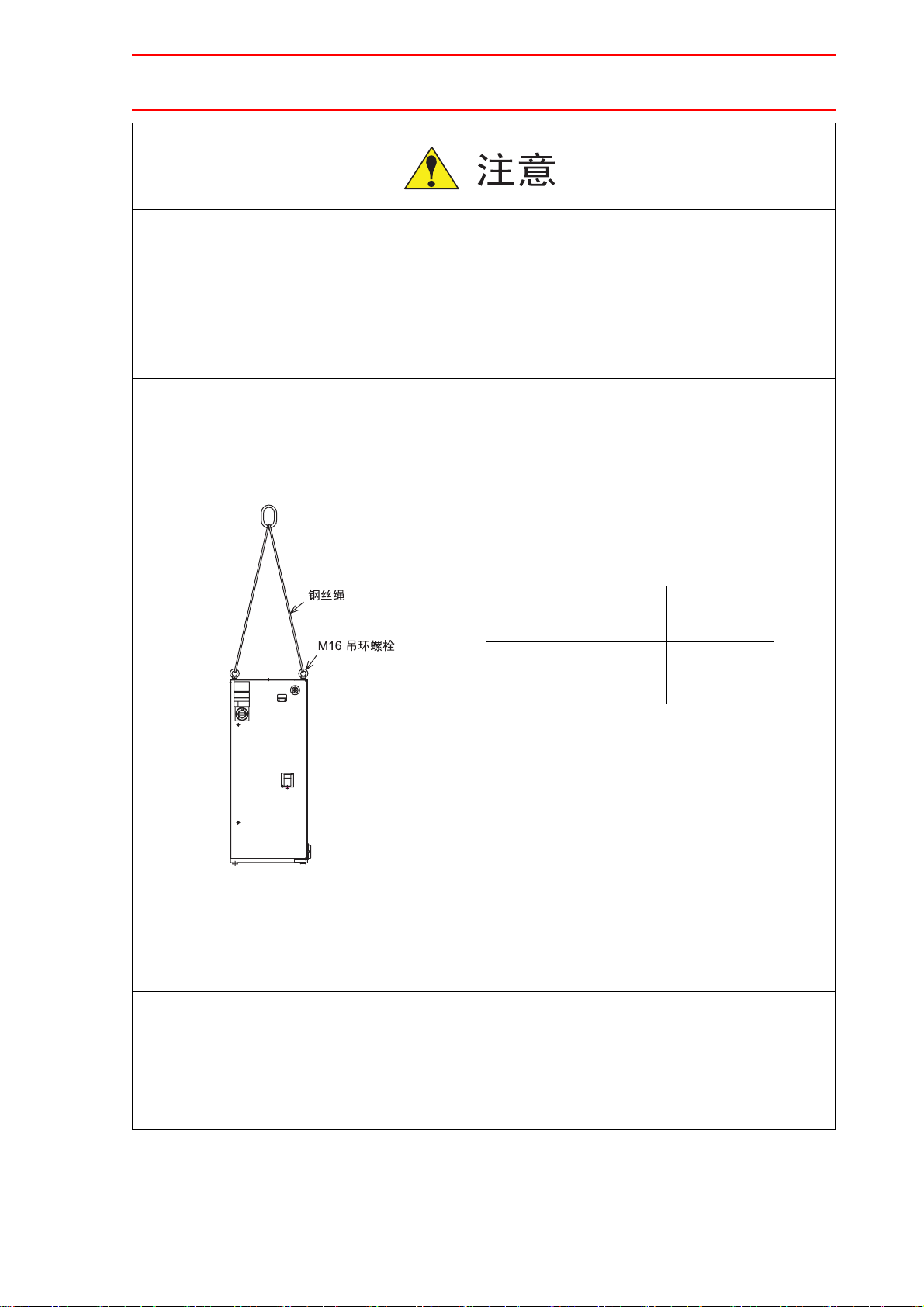
• 吊车、吊具或叉车应由经授权的人员进行操作。
否则可能会造成人身伤害和设备损坏。
机器人用穿过吊环的钢丝绳和定位装置使其本体保持垂直,用天车按机器人说明书中的
说明进行起吊。
否则可能会造成机器人向下倾翻 , 从而引起人身伤害或设备损坏。
• 起吊 NX100 时,请检查下列事项 :
- 通常起吊 NX100 必须使用固定在其上的吊环螺栓,穿好钢丝绳由天车进行起吊。
确认钢丝绳足够坚固,以能承受 NX100 的重量。
NX100 的重量 ( 大约 )
NX100 及相应类型
大约重量
(kg)
HP6, HP20, EA1400N 100
EH50, HP165, ES165N 150
ON
RESET
NX100
• 确保吊环螺栓固定牢固。
否则可能会造成人身伤害和设备损坏。
• 如果在安装前需临时保管机器人,则应将其放在稳固的平面上,并采取措施以防非工作人
员随意触动。
否则可能会造成人身伤害和设备损坏。
1-7
1.5 机器人的安全注意事项
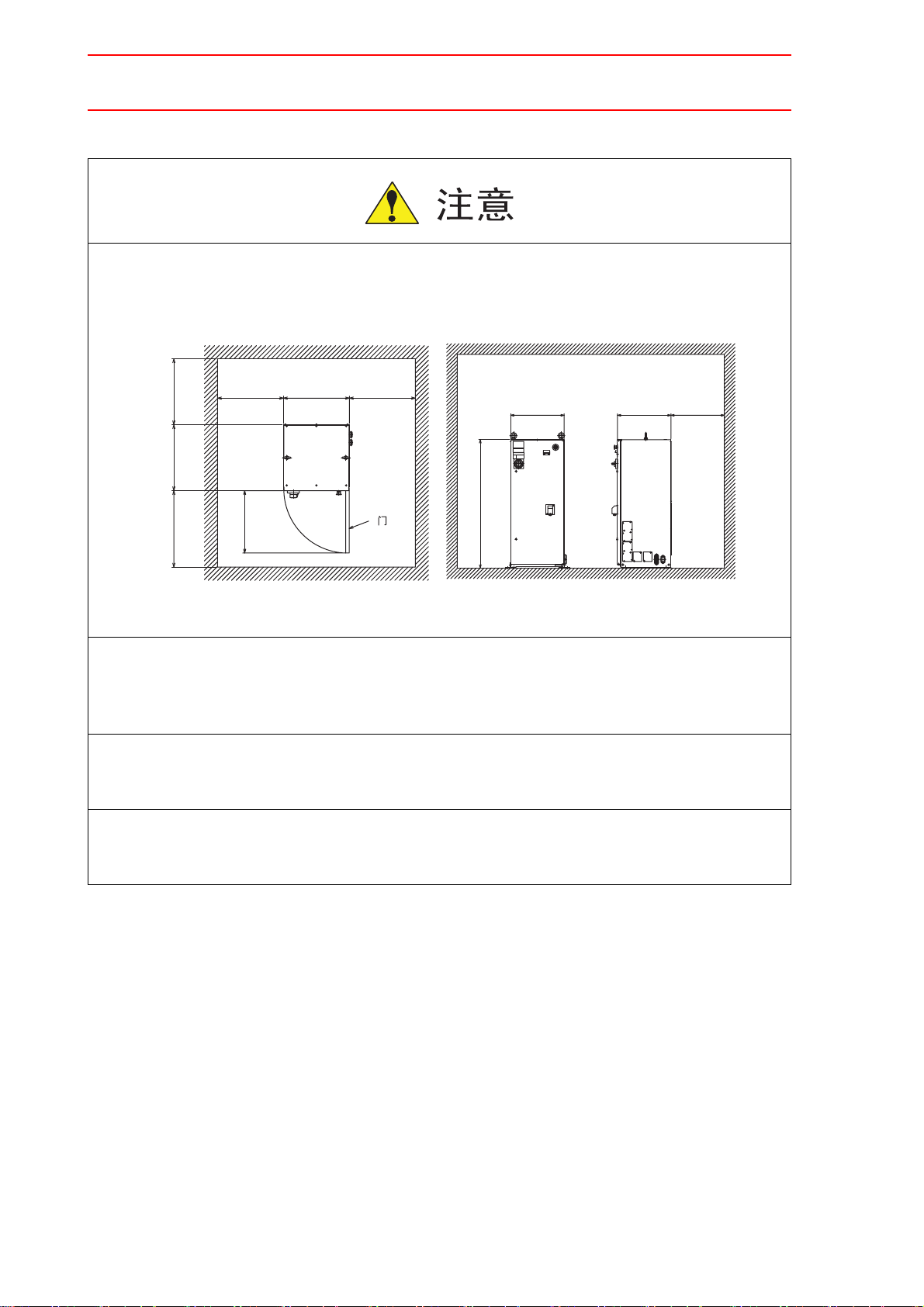
• 确认有足够的空间来维修机器人、 NX100 和其它外围设备。
否则可能会在维修期间造成伤害事故。
500
500
(550)
580
(680)
安全距离 (mm)
500
473
(573)
(600)
500
NX100
500
(600)
1200
外形尺寸 (mm)
500
NX100
(550)
500
NX100
• 机器人是由 NX100 控制柜或夹具用控制柜进行控制的。
为了确保安全 , 一定要在能看得见机器人的位置进行操作。
未经授权的人员操作可能会造成人身伤害或设备损坏。
• NX100 应安装在机器人动作范围的安全围栏之外。
否则可能会由于接触机器人而造成人身伤害和设备损坏。
• 针对各种机器人,应按说明书中规定的螺栓大小及类型来安装机器人 .
500
否则可能会造成人身伤害和设备损坏。
1-8
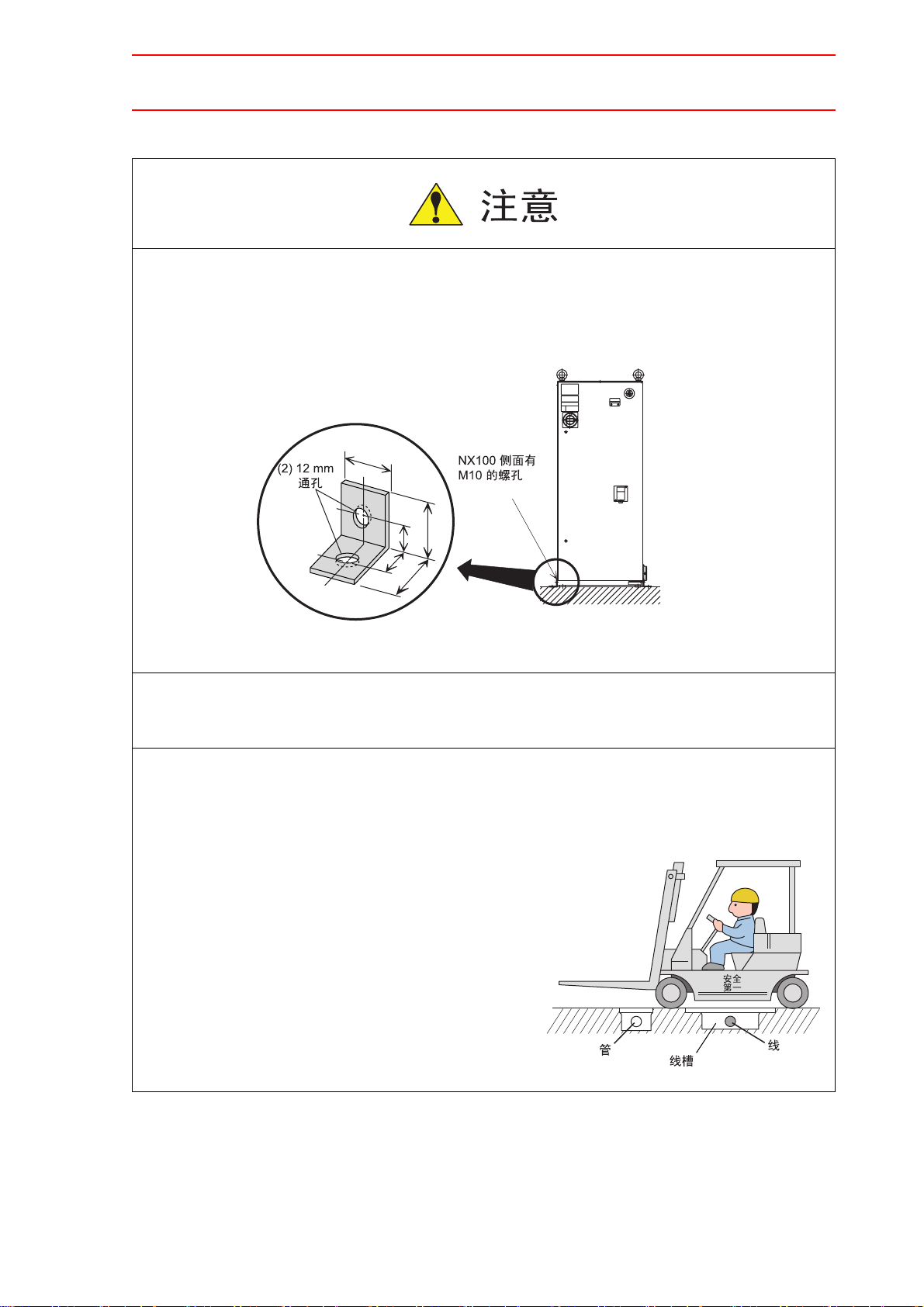
• 设定后将 NX100 的位置固定。
使用 NX100 底部的螺栓孔用螺栓将其固定在地面或台架等其他物体上。
NX100
40
1.5 机器人的安全注意事项
50
30
30
50
(mm)
否则可能会引起 NX100 移位或倾倒,从而造成人身伤害和设备损坏。
• 为 NX100 配线前须熟悉配线图,配线须按配线图进行。
错误的配线或零、部件的不正确移位,将会产生设备损坏或人身伤害。
• 在进行 NX100 与机器人、外围设备间的配线及配管时须采取防护措施,如将管、线或电缆
从坑内穿过或加保护盖予以遮盖,以免被人踩坏或被叉车辗压而坏。
操作者和其他人员可能会被明线、电缆或管路绊住
而将其损坏,从而会造成机器人的非正常动作,以致
引起人身伤害或设备损坏。
1-9
1.5 机器人的安全注意事项
1.5.2 作业区安全
在作业区内工作时粗心大意会造成严重的事故,因此强令执行下列防范措施:
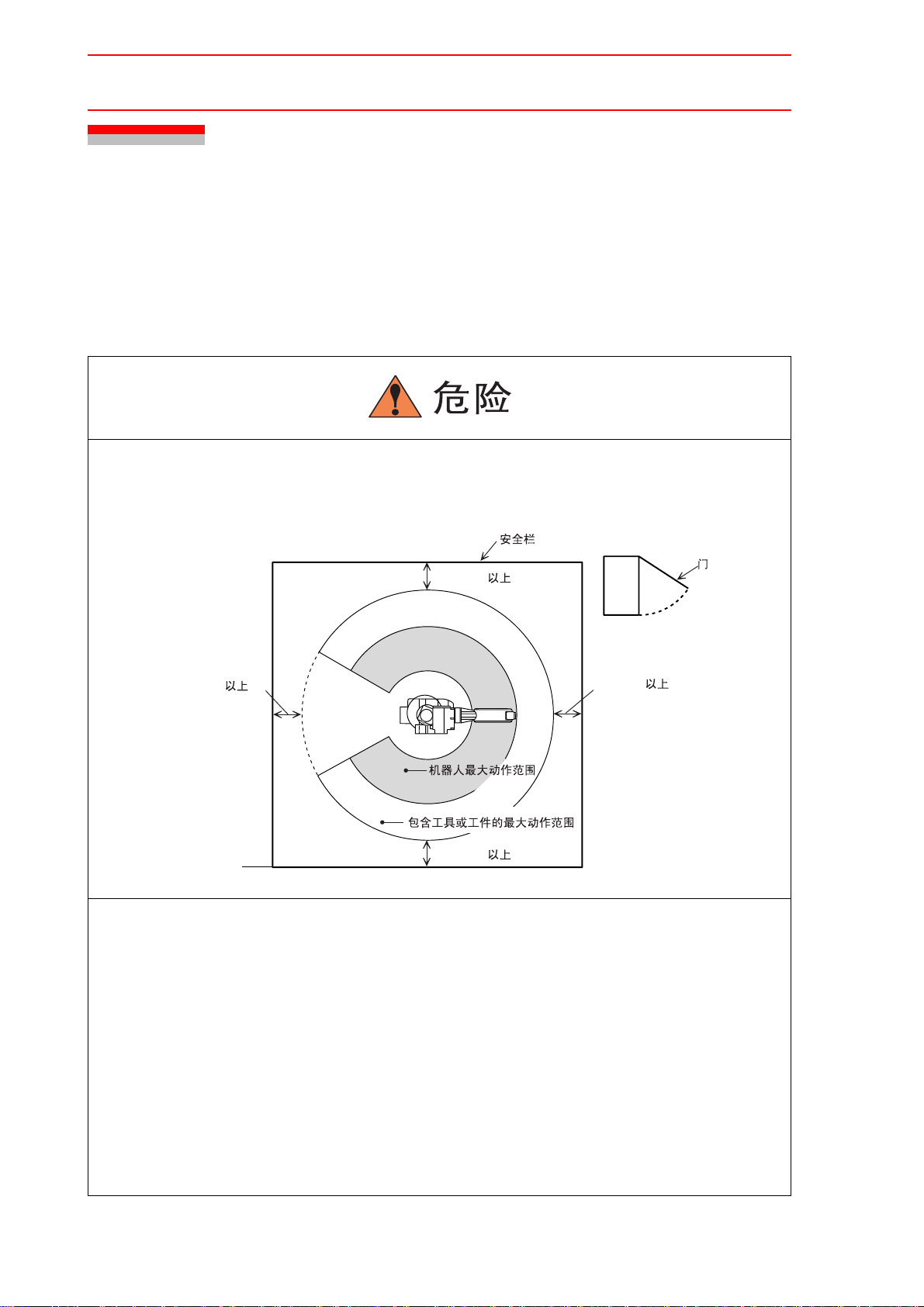
• 在机器人周围设置安全围栏,以防造成与已通电的机器人发生意外的接触。 在安全围栏的
入口处要张贴一个 “远离作业区”的警示牌。安全围栏的门必须加装可靠的安全联锁装
置。
忽视此警示会由于接触机器人而可能造成严重的事故。
• 备用工具及类似的器材应放在安全围栏外的合适地区内。
工具和散乱的器材不要遗留在机器人、NX100 或系统 ( 如焊接夹具)等周围,如果机器人
撞击到作业区中这些遗留物品,即会发生人身伤害或设备事故。
1-10
1.5 机器人的安全注意事项
1.5.3 操作安全
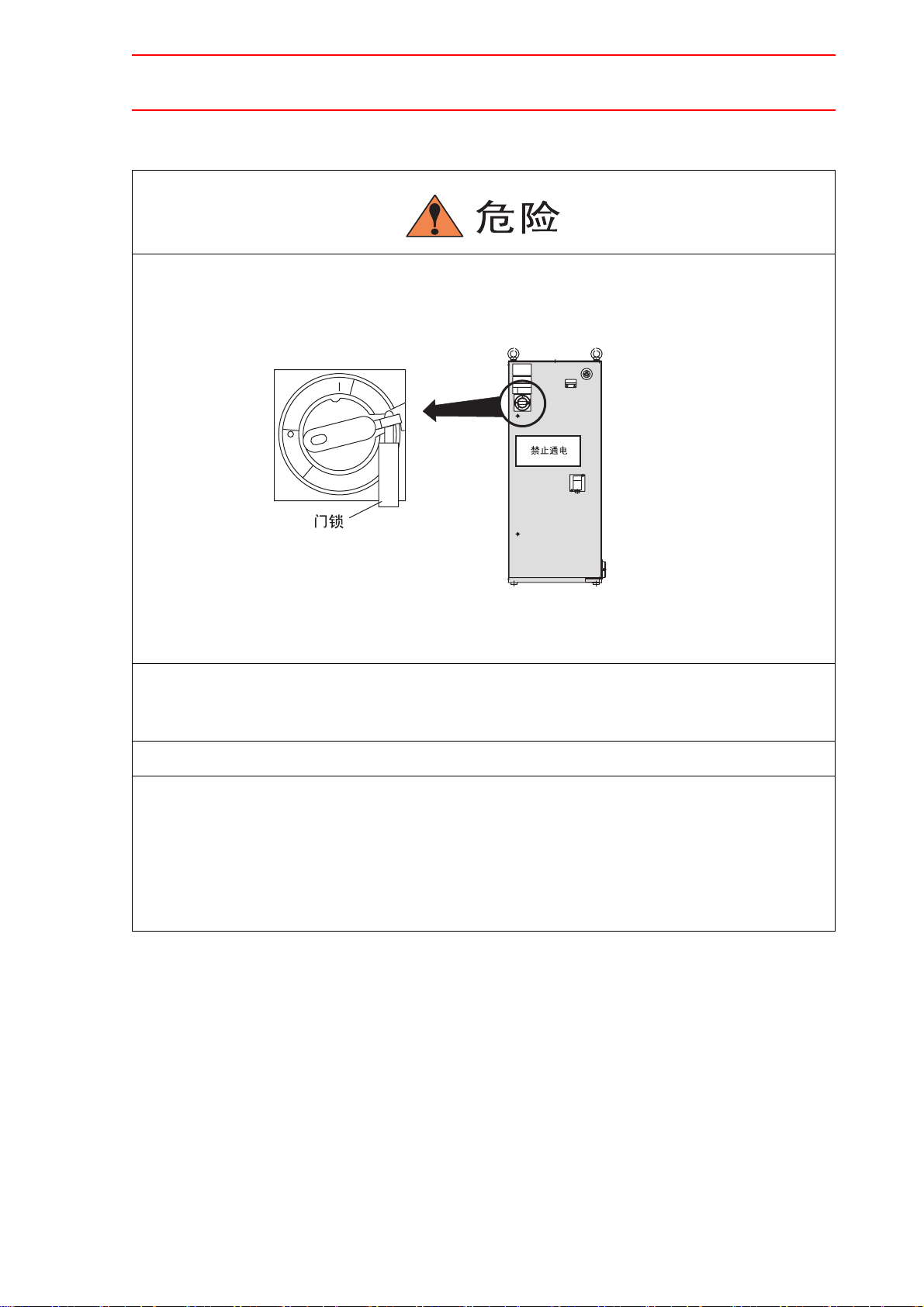
• 当往机器人上安装一个工具时,务必先切断 (OFF) 控制柜及所装工具上的电源并锁住其电
源开关,而且要挂一个警示牌。
TRIPPED
OFF
T
E
S
E
R
ON
ON
ESET
R
NX100
安装过程中如接通电源 , 可能会因此造成电击 , 或会产生机器人的非正常运动,从而引起
伤害。
• 绝不要超过机器人的允许范围 ( 机器人的允许范围请参见说明书中的技术规范部分)。
否则可能会造成人身伤害和设备损坏。
• 无论何时如有可能的话 , 应在作业区外进行示教工作。
• 当在机器人动作范围内进行示教工作时,则应遵守下列警示 :
- 始终从机器人的前方进行观察。
- 始终按预先制定好的操作程序进行操作。
- 始终具有一个当机器人万一发生未预料的动作而进行躲避的想法。
- 确保您自己在紧急的情况下有退路。
否则可能误操作机器人,造成伤害事故。
1-11

1.5 机器人的安全注意事项
• 在操作机器人前,应先按 NX100 前门及示教编程器右上方的急停键,以检查 “伺服准备”
的指示灯是否熄灭,并确认其电源确已关闭。
如果紧急情况下不能使机器人停止,则会造成机械的损害。
• 在执行下列操作前,应确认机器人动作范围内无任何人:
- 接通 NX100 的电源时
。
- 用示教编程器移动机器人时。
- 试远行时。
- 再现操作时。
如果人员进入机器人动作范围,可能会因与机器人接触而引起伤害。
如发生问题,则应立即按动急停键。
急停键位于 NX100 控制柜前门及示教编程器的右上方 ( 见下图所示 )。
REMOTE
TEACH
PLAY
HOLDSTART
ON
RESET
NX100
1-12
1.5 机器人的安全注意事项
• 示教机器人前先执行下列检查步骤,如发现问题则应立即更正,并确认所有其他必须做的
工作均已完成。
- 检查机器人运动方面的问题。
- 检查外部电缆的绝缘及护罩是否损害。
• 示教编程器使用完毕后 , 务必挂回到 NX100 控制柜的钩子上。
如示教编程器遗留在机器人上、系统夹具上或地面上,则机器人或装载其上的工具将会碰
撞它,因此可能引起人身伤害或设备损坏。
• 机器人的操作或检查人员必须接受有关法规及公司策略的培训。
( 参见 1.2 节的专门培训 )
1-13
1.6 移动及转让机器人的注意事项
1.6 移动及转让机器人的注意事项
移动及转让机器人时,应遵照下列安全防范事项:
• 移动或转让机器人时,应附带机器人的有关说明书 ( 见 1.3 节中的说明书清单 ) 以便所有用
户有权使用这些必须的说明书。
如缺少任何说明书,请与首钢莫托曼机器人有限公司联系。
• 如果机器人及 NX100 上的警示牌模糊不清,请清理此警示牌,以便能被正确辨认。另请注
意某些地方法规的规定,如安全警示牌不在适当的位置上,可能会被禁止该设备的使用。
如果您需要新的警示牌,请与首钢莫托曼机器人有限公司联系。
• 移动或转让机器人时,建议请首钢莫托曼机器人有限公司派员进行检查。
错误的安装及配线会造成人身伤害和设备事故。
• 绝不要对机器人或 NX100 做任何改动。
不遵守此警示会引起火警、电力故障或操作错误,以致造成设备损坏及人身伤亡。
1-14

1.7 废弃机器人的注意事项
• 废弃机器人必须遵照国家及地方的法律和有关规定。
• 废弃前即使是作临时的保管 , 也应将机器人固定牢靠以防止倾倒。
否则可能会由于机器人摔倒而造成伤害。
1.7 废弃机器人的注意事项
1-15
2.1 装箱内容确认
2 产品确认
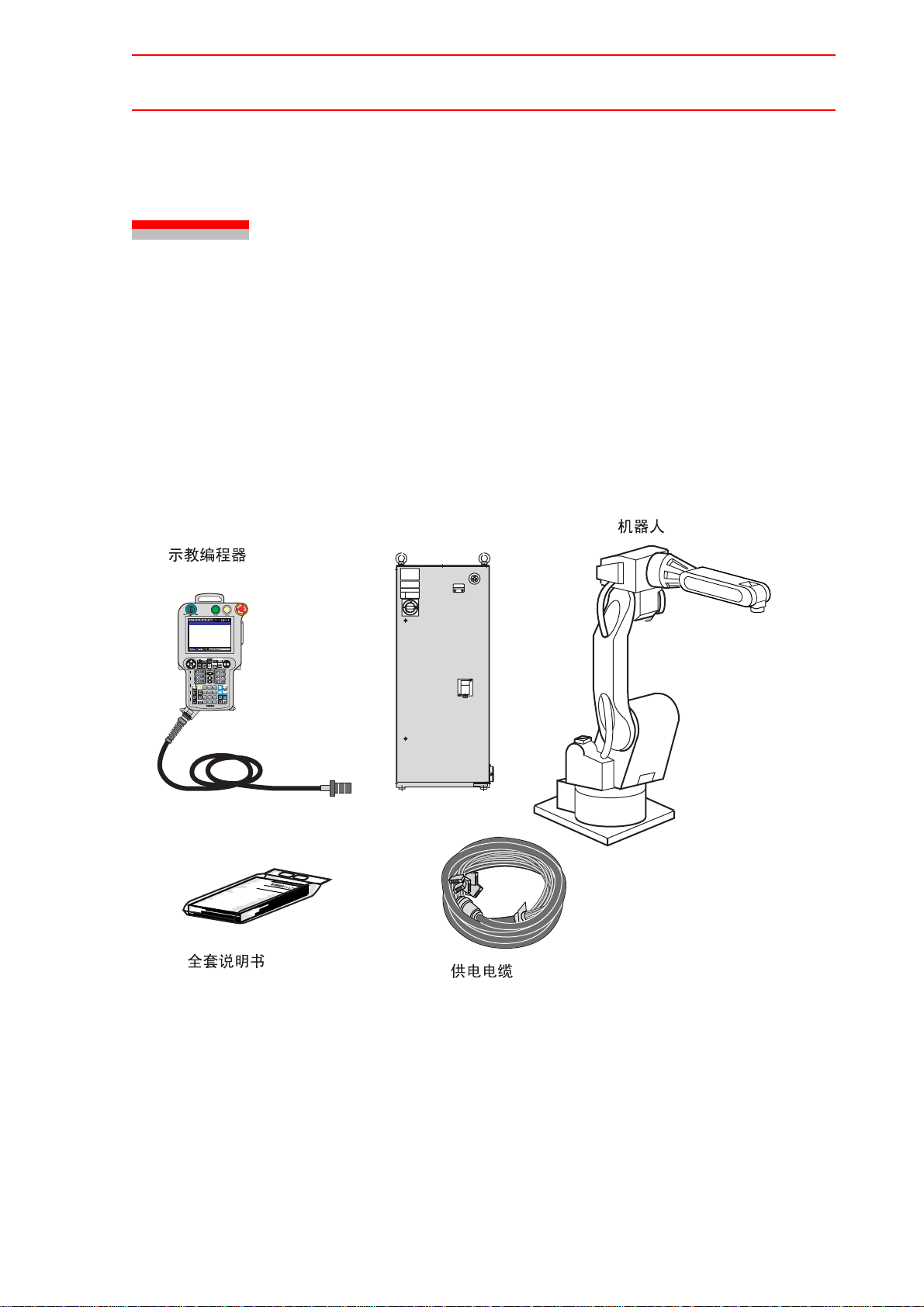
2.1 装箱内容确认
产品到达后请清点其发货清单,标准的发货清单中包括下列 5 项内容:( 有关选项货物内容的
信息将单独提供 )
• 机器人
• NX100 控制柜
• 示教编程器
• 供电电缆 ( 机器人与 NX100 间的电缆 )
• 全套说明书
NX100
2-1
 Loading...
Loading...