

Page 1

User Manual
Segway® Robotics Mobility Platform
210/220
Page 2

RMP 210/220
Contents
Copyright, Disclaimer, Trademarks, Patent, and Contact Information .................................................................... 6
Introduction
Safety.......................................................................................................................................................................... 8
Abbreviations ........................................................................................................................................................... 10
RMP 210 and 220
Included Components............................................................................................................................................... 11
Capabilities ................................................................................................................................................................12
Coordinate System ...................................................................................................................................................13
Physical Characteristics – 210 .................................................................................................................................14
Physical Characteristics – 220 ................................................................................................................................15
Mounting Locations — 210 .......................................................................................................................................16
Mounting Locations — 220 .......................................................................................................................................16
Turn Envelope ............................................................................................................................................................ 17
User Interface Panel ..................................................................................................................................................18
Powerbase Connections ...........................................................................................................................................19
Performance Specifications .................................................................................................................................... 20
Environmental Specifications..................................................................................................................................20
Transportation and Shipping ....................................................................................................................................21
Balancing
Payload Gain Schedules .......................................................................................................................................... 23
Balance Mode Requirements .................................................................................................................................. 24
Entering Balance Mode ............................................................................................................................................ 24
Exiting Balance Mode............................................................................................................................................... 25
Performance Limits ................................................................................................................................................. 25
Interaction With The Environment .......................................................................................................................... 27
Balance Mode Faults .................................................................................................................................................31
Hardware Balance Request ......................................................................................................................................31
Velocity Filter .............................................................................................................................................................31
Electrical Overview
System Architecture ................................................................................................................................................32
System Power ........................................................................................................................................................... 32
System Components ............................................................................................................................................... 33
Copyright © 2014 Segway Inc. All rights reserved.
2
Page 3

RMP 210/220
Operational Model
Operational States ................................................................................................................................................... 35
Faults ........................................................................................................................................................................36
Initialization ..............................................................................................................................................................36
Diagnostic Mode ...................................................................................................................................................... 37
Bootloader Mode...................................................................................................................................................... 37
Standby Mode .......................................................................................................................................................... 37
Tractor Mode ............................................................................................................................................................ 37
Balance Mode ........................................................................................................................................................... 37
Disable Mode ............................................................................................................................................................38
Decel To Zero (DTZ) Mode .......................................................................................................................................38
Charging
Using the External Power Supply ............................................................................................................................39
Charge Status LEDs .................................................................................................................................................39
Powering On/Off
Powering On .............................................................................................................................................................40
Powering Off ............................................................................................................................................................. 40
Connecting
Connector I ................................................................................................................................................................41
Starter Breakout Harness ........................................................................................................................................42
Connector II ..............................................................................................................................................................43
Disable Button ..........................................................................................................................................................43
Additional Signals ....................................................................................................................................................43
Connector IV.............................................................................................................................................................44
Connecting To the RMP ............................................................................................................................................ 45
Communication
General Command Structure ..................................................................................................................................48
Standard Motion Commands ..................................................................................................................................50
Configuration Commands ........................................................................................................................................51
Standard Input Mapping .......................................................................................................................................... 62
RMP Response .........................................................................................................................................................66
IEEE754 32-bit Floating Point and Integer Representation .................................................................................... 77
Cyclic Redundancy Check (CRC)-16 ....................................................................................................................... 78
Fault Status Definitions ...........................................................................................................................................82
Copyright © 2014 Segway Inc. All rights reserved.
3
Page 4

RMP 210/220
Internal Connections
Centralized Control Unit ..........................................................................................................................................88
Auxiliary Battery Board ............................................................................................................................................89
Smart Charger Board ............................................................................................................................................... 90
Communication.........................................................................................................................................................91
Hardware Controls ................................................................................................................................................... 97
Mode Selection ........................................................................................................................................................98
Status Indicators ...................................................................................................................................................... 98
CCU Input Power ...................................................................................................................................................... 99
CCU Battery Supply ................................................................................................................................................. 99
Coin Cell Battery ......................................................................................................................................................99
Included Software
Installing the Software ........................................................................................................................................... 100
RMP CCU Bootloader Application ..........................................................................................................................101
OCU Demo Application .......................................................................................................................................... 102
Software License Agreement .................................................................................................................................107
Maintenance
Fastener Torque ...................................................................................................................................................... 108
Tire Pressure .......................................................................................................................................................... 108
Parts List — 210 .....................................................................................................................................................109
Use the diagram and table below to identify part names and numbers. ............................................................. 109
Parts List — 220 ......................................................................................................................................................110
Use the diagram and table below to identify part names and numbers. .............................................................. 110
Removing Wheel Assemblies ...................................................................................................................................111
Replacing Wheel Assemblies ...................................................................................................................................111
Cleaning ....................................................................................................................................................................111
Software Updates .....................................................................................................................................................111
Batteries
Replacing Batteries ................................................................................................................................................. 112
Installation and Removal Instructions ...................................................................................................................113
Transportation and Shipping .................................................................................................................................. 113
Proper Disposal ....................................................................................................................................................... 113
Copyright © 2014 Segway Inc. All rights reserved.
4
Page 5

RMP 210/220
Troubleshooting
Reporting Problems to Segway .............................................................................................................................. 114
Extracting the Faultlog ............................................................................................................................................ 114
Reading the Faultlog ............................................................................................................................................... 115
Faults .......................................................................................................................................................................116
Charging Faults ...................................................................................................................................................... 120
Other Issues ........................................................................................................................................................... 120
Copyright © 2014 Segway Inc. All rights reserved.
5
Page 6

RMP 210/220
Copyright, Disclaimer, Trademarks, Patent, and Contact Information
Copyright © 2014 Segway Inc. All rights reserved.
Disclaimer
The Segway RMP is not a consumer product. Usage examples shown on rmp.segway.com have not necessarily been reviewed nor
approved by Segway Inc. ("Segway"). Segway is not responsible for end customer modifications or additions.
Trademarks
Segway owns a number of trademarks including, but not limited to, Segway and the Segway "Rider Design" logo that have been registered
in the United States and in other countries. Those trademarks followed by ® are registered trademarks of Segway. All other marks are
trademarks or common law marks of Segway. Failure of a mark to appear in this guide does not mean that Segway does not use the mark,
nor does it mean that the product is not actively marketed or is not significant within its relevant market. Segway reserves all rights in its
trademarks. All other trademarks are the property of their respective companies.
Xbox® is a registered trademark of Microsoft Corporation.
Logitech® is a registered trademark of Logitech International SA.
Segway Patent Information
The Segway RMP is covered by U.S. and foreign patents. For a patent listing, see http://rmp.segway.com/RMPPatents.pdf.
Contact Information
For support, please contact Segway Customer Care or use the RMP forum at http://rmp.segway.com/forum.
Segway Customer Care: 866-4SEGWAY (866-473-4929)
Fax: 603-222-6001
E-mail: technicalsupport@segway.com
Website: http://rmp.segway.com
Copyright © 2014 Segway Inc. All rights reserved.
6
Page 7
RMP 210/220
Introduction
The Segway Robotics Mobility Platform (RMP) is a robotic vehicle chassis and power-train designed to be integrated with additional
components to create robotic products. It is intended to be the mobility component for any number of robotic applications and as such
was designed with versatility, durability, and performance in mind.
Segway engineers have led the way with electric drive propulsion systems in the fields of battery management, advanced sensing, driveby-wire control, and dynamic stabilization. The RMP benefits from some of the same proprietary technology that has been deployed and
proven around the world as part of the Segway Personal Transporter (Segway PT) line of products.
The RMP can handle high payloads, a variety of environmental conditions, and a wide range of operational scenarios. The chassis is
designed to handle a certain amount of abuse consistent with operation over rough terrain and in industrial environments. Control
parameters can be tweaked to make it easy to drive slowly around obstacles, at high speed in open spaces, or in any environment in
between.
Control of the RMP occurs via command and response messages sent over Ethernet, CAN, or USB interfaces. Commands are used to
control movement, set configuration parameters, and control response data. Response messages provide detailed information about
the current status of the RMP. Segway has chosen to allow users to control overall RMP movement, but not individual wheels/motors.
This frees users to treat the RMP as a single unit rather than a collection of components, and allows Segway to provide a more robust,
predictable mobility platform.
To allow for the greatest possible control over the RMP's behavior, a variety of configuration parameters can be modified. However, it is
possible to set these parameters to unsafe values, so care must be taken when setting parameters to reduce the risk of damage or injury.
It is the user's responsibility to set configuration parameters to safe values. Be sure to follow all safety instructions in this document.
This manual describes the capabilities of the RMP and explains how to communicate with it. Integrators and engineers can use this
information to mount equipment on the RMP and write software for controlling the RMP.
Copyright © 2014 Segway Inc. All rights reserved.
7
Page 8
RMP 210/220
Safety
Improper use of the RMP can cause personal injury, death and/or property damage from loss of control, collision, and falls. To reduce risk
of injury, read and follow all instructions and warnings in this manual.
The following safety messaging conventions are used throughout this document:
WARNING!
CAUTION!
NOTICE
WARNING!
• Keep out of reach of children and pets. Unanticipated movement by the RMP could result in death or serious injury.
• Do not sit, stand, or ride on the RMP. Doing so could result in death or serious injury.
• Do not drive the RMP at people or animals. A collision could result in death or serious injury.
• Always alert people in the vicinity when an RMP is operating. An unexpected collision with the RMP could result in death or
serious injury.
• Avoid powering off on a slope. The RMP cannot hold its position when powered off and may roll downhill, causing serious
injury, death, or property damage.
• The RMP can accelerate rapidly. It is recommended that the RMP be securely raised so the wheels are off the ground (or
remove the wheels) until the user becomes familiar with the controls. Unanticipated movement by the RMP could result in
death or serious injury.
• Be careful when working with the DC power connections. You could shock yourself and/or damage the RMP.
• Remove batteries before working inside the RMP. You risk serious bodily injury from electric shock as well as damage to the
RMP.
• Do not submerge the RMP, batteries, or powerbases, in water. Do not use a power washer or high-pressure hose to clean
a RMP. Avoid getting water into any of the connectors. If you suspect the batteries or powerbase have been submerged or
experienced water intrusion, call Segway Technical Support immediately at 1-866-473-4929, prompt #2. Until you receive
further instructions, store the RMP upright, outdoors, and away from flammable objects. Failure to do so could expose you
to electric shock, injury, burns, or cause a fire.
• Unplug or disconnect the RMP from AC power before removing or installing batteries or performing any service. Never work
on any part of the RMP when it is plugged into AC power. You risk serious bodily injury from electric shock as well as damage
to the RMP.
• The cells within the batteries contain toxic substances. Do not attempt to open batteries. Do not insert any object into the
batteries or use any device to pry at the battery casing. If you insert an object into any of the battery's ports or openings
you could suffer electric shock, injury, burns, or cause a fire. Attempting to open the battery casing will damage the casing
and could release toxic and harmful substances, and will render the battery unusable.
• As with all rechargeable batteries, do not charge near flammable materials. When charging, the batteries heat up and could
ignite a fire.
• Do not use a battery if the battery casing is broken or if the battery emits an unusual odor, smoke, or excessive heat or leaks
any substance. Avoid contact with any substance seeping from the battery. Batteries contain toxic and corrosive matrials
that could cause serious injury.
• Observe and follow all safety information on the warning label found on the battery. Failure to do so could result in death,
serious injury, or property damage.
• Do not use cables that are frayed or damaged. You could shock yourself and/or damage the RMP.
• Use only Segway approved fasteners on the RMP. Other fasteners may not perform as expected and may come loose. Failure
to do so could expose you to risk of personal injury or property damage.
• Use assistance when moving or lifting the RMP. Single person lifting could result in serious injury.
Warns you about actions that could result in death or serious injury.
Warns you about actions that could result in minor or moderate injury.
Indicates information considered important, but not related to personal injury. Examples include
messages regarding possible damage to the RMP or other property, or usage tips.
Copyright © 2014 Segway Inc. All rights reserved.
8
Page 9

RMP 210/220
CAUTION!
• Be responsible about setting performance parameters. Read the relevant sections of this manual before changing any
performance parameters. The RMP follows commands issued to it, and it is the responsibility of the user to properly
safeguard their controls.
• Read and understand the Balancing chapter of this manual before operating the RMP in Balance Mode. The RMP's behavior
while balancing is not always intuitive and may result in unexpected or undesired motion.
• Failure to charge the batteries could result in permanent damage to them. Left unplugged, the batteries could fully
discharge over time, causing permanent damage.
• Use only charging devices approved by Segway and never attempt to bypass or override their charging protection circuits.
• Always protect against electrostatic discharge (ESD) when working inside the RMP. The RMP could become damaged.
NOTICE
• This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to Part 15 of
the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential
installation. This equipment generates, uses and can radiate radio frequency energy and, if not installed and used in
accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee
that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or
television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct
the interference by one or more of the following measures:
• Reorient or relocate the receiving antenna.
• Increase the separation between the equipment and receiver.
• Connect the equipment into an output on a circuit different from that to which the receiver is connected.
• Consult the dealer or an experienced radio/TV technician for help.
• This Class B digital apparatus complies with Canadian ICES-003.
Cet appareil numérique de la classe b est conforme à la norme NMB-003 du Canada.
• Modifications not expressly approved by Segway may void the user's authority to operate this device under FCC regulations
and must not be made.
Copyright © 2014 Segway Inc. All rights reserved.
9
Page 10

RMP 210/220
Abbreviations
ABB Auxiliary Battery Board — a PCB used to gather and report performance information from the auxiliary battery.
BCU Battery Control Unit — a PCB inside the battery pack that manages the charge of the individual cells.
BSA Balance Sensor Assembly — a group of PCBs used to obtain information about the vehicle's orientation.
CAN Controller Area Network — a message-based protocol used for communication between microcontrollers.
CCU Centralized Control Unit — a PCB that houses the SP, UIP, and NVM; it controls the RMP and handles communication.
CRC Cyclic Redundancy Check — a type of error-detection used to verify the accuracy of transmitted data.
DLC Data Length Code — a part of the CAN message header that specifies the size of the data packet being sent.
DTZ Decelerate To Zero — an operational mode in which the RMP comes to a stop and powers down.
LE Large Enclosure — a unified chassis/enclosure for 4-wheeled RMP models.
MCU Motor Control Unit — a PCB that controls the electric motors that turn the wheels.
NVM Non-Volatile Memory — a type of digital memory that can retain the stored information even when not powered.
OCU Operator Control Unit — software and hardware that provide an interface between the user and the RMP.
PCB Printed Circuit Board — a thin board with conductive pathways and electronic components mounted on it.
PSE Pitch State Estimate — a 3-axis inertial estimate of the orientation of the RMP.
RMP Robotics Mobility Platform — a propulsion system that can be used as a platform for making mobile robots.
SCB Smart Charger Board — a PCB that controls battery charging functions.
SE Small Enclosure — a box that contains all of the electrical components of the RMP.
SID Standard ID — a CAN identifier that indicates the type of message being sent.
SOC State Of Charge — a measurement of battery charge from 0% (empty) to 100% (full).
SP Segway Processor — a microcontroller on the CCU that contains proprietary Segway code for controlling the RMP.
SPI Serial Peripheral Interface — a synchronous serial data link standard that operates in full duplex mode.
UDP User Datagram Protocol — a simple, transaction-oriented network protocol on top of TCP/IP.
UDFB User Defined Feedback Bitmap — a stored value that indicates what feedback data should be sent to the user.
UI User Interface — the means by which an operator interacts with a device.
UIP User Interface Processor — a microcontroller on the CCU that communicates with the OCU.
USB Universal Serial Bus — an industry-standard bus for communication and power supply between computers and peripherals.
VAB Vicor Adapter Board — a PCB that interfaces with Vicor DC-DC converters.
Copyright © 2014 Segway Inc. All rights reserved.
10
Page 11

RMP 210/220
RMP 210 and 220
The RMP 210 and RMP 220 are battery-powered Robotics Mobility Platforms (RMPs) meant to be used as the propulsion systems for
robotic products. The major difference between the two models is the number of Motor Control Units (MCUs) in the powerbase and the
presence or absence of a Balance Sensor Assembly (BSA). The RMP 210 has one MCU, one propulsion battery, and no BSA. The RMP
220 has two MCUs, two propulsion batteries, and a BSA. The second MCU provides component-level redundancy: one MCU can fail and
the platform will continue to operate. The second battery provides additional range and operational time. The BSA contains sensors that
provide the orientation data necessary for balancing.
The RMP 210 is a compact, non-balancing platform with three wheels: two propulsion wheels and one caster wheel. It has only one Motor
Control Unit (MCU) and one propulsion battery, making it suitable for low payload applications that don't require redundancy.
The RMP 220 is taller than the 210 and is capable of running in either Tractor Mode (with a third wheel) or in Balance Mode (balancing
on two wheels). When in Balance Mode it operates much like the Segway PT, leaning slightly in the direction of movement. The platform
has two MCUs and two propulsion batteries, allowing it to operate at higher payloads and over longer distances. With two MCUs the
propulsion system is completely redundant, allowing one MCU to fail without losing control of the platform. At the top of the RMP 220 is a
mounting plate with drilled and tapped holes for users to mount their equipment.
The powerbase contains the MCUs and Balance Sensor Assembly (BSA). Additional electrical components are mounted inside a User
Interface (UI) box located above the powerbase. Propulsion batteries are mounted to the bottom of the powerbase. The auxiliary battery
is mounted to the top of the UI box.
The on/off switch, external connectors, and indicator lights are mounted on an interface panel at the front of the machine.
Communication with the RMP can occur over Ethernet, CAN, and USB.
Inside the UI box are the Centralized Control Unit (CCU), Auxiliary Battery Board (ABB), Smart Charger Board (SCB), and Power
Converter(s). A cable runs from the UI box to the powerbase.
Figure 2: RMP 220Figure 1: RMP 210
Included Components
The RMP 220 comes with a Disable Button, Starter Breakout Harness, and External Power Supply. The Disable Button must be connected
for the RMP to power on and enter Standby Mode. When pressed, the Disable Button will cause the RMP to immediately shut down. The
Starter Breakout Harness provides Ethernet, CAN, and USB connectors as well as leads for DC power. The External Power Supply is used
to charge the RMP. When connected, indicator lights on the UI box show the charge status of each battery.
Figure 3: Disable Button Figure 4: Starter Breakout Harness Figure 5: External Power Supply
Copyright © 2014 Segway Inc. All rights reserved.
11
Page 12

RMP 210/220
Capabilities
The RMP is meant to be used by integrators when creating mobile robotic products. As such, the RMP was designed with flexibility and
expandability in mind.
Driving
The RMP can drive forward, reverse, and can turn in place. A variety of parameters can be adjusted for easier driving in different
circumstances, making it possible to have fine control at slow speeds and at high speeds. Adjustable parameters include maximum
velocity, maximum acceleration, maximum deceleration, maximum turn rate, and maximum turn acceleration.
Velocity control can either be velocity-based (m/s) or acceleration-based (m/s2). With velocity-based control the user continually
sends the desired velocity command (e.g. by holding a joystick steady to achieve a steady velocity). With acceleration-based control,
acceleration commands are sent until the RMP reaches the desired speed. Then an acceleration of zero is commanded in order to
maintain that speed. This is similar to using cruise control on the highway. See "Standard Input Mapping," p. 62, for more information
on the different types of control.
For safety, a disable button is provided with the RMP. When pressed, the disable button will cause the RMP to shut down. A Decel To Zero
(DTZ) command can also be sent, either by hardware button (not supplied) or by software command. This command causes the RMP to
decelerate and come to a stop before powering down.
Payload
Users can mount equipment to the rails along the sides of the RMP. Mounting holes are provided along the tops of the rails and on the
ends of the rails. On the RMP 220, users can mount equipment to the mounting plate at the top of the RMP.
The maximum total payload is 180 kg (400 lbs), evenly distributed.
Communication
Communication with the RMP can occur over Ethernet, CAN, or USB. If using Ethernet the IP address, port number, subnet mask, and
gateway can all be configured. For both Ethernet and USB communications, a Cyclic Redundancy Check (CRC) is performed, which
verifies the accuracy of the transmitted data.
The RMP communicates via a polling method: the user sends a command and the RMP responds. Commands can be either motion
commands (that tell the RMP to move) or configuration commands (that set user-configurable parameters). Some of these parameters —
the User Defined Feedback Bitmaps — control what information is sent in the RMP response, allowing the user to receive only the relevant
data.
The RMP expects to receive commands within a frequency range (0.5 Hz - 100 Hz). If commands are issued too frequently the RMP will
ignore them. If commands are updated too slowly the RMP will slew the commands to zero.
Power
With the auxiliary battery, the RMP can provide power for additional equipment. Each RMP has space for two Power Converters. For more
information see "Power Converter," p. 34.
Control Interface
The user is responsible for creating an interface for communicating with and controlling the RMP. Details on how to communicate with
the RMP and interpret its responses are described later in this document (see "Communication," p. 47).
To make this process easier, Segway provides an OCU Demo Application and source code (see "OCU Demo Application," p. 102). This
application is fully functional, but is not intended to be an end solution. Instead it is meant to be used as a functional example of how to
interface with the RMP.
Copyright © 2014 Segway Inc. All rights reserved.
12
Page 13

RMP 210/220
Coordinate System
The Balance Sensor Assembly (BSA) uses accelerometers and gyroscopes to determine the position and movement of the RMP, all of
which are used to create the Pitch State Estimate (PSE). This data is available to the user.
The RMP has a coordinate system relative to forward/reverse, pitch, roll, and yaw. This coordinate system is used when controlling the
RMP. The diagrams below show the RMP's axes and coordinate system.
Both the RMP 210 and 220 share the same coordinate system. An RMP 210 is pictured below.
Z
Ψ'
Figure 7: RMP Roll Axis, Rear View
Figure 6: RMP Axes
Φ
Φ'
Θ'
Figure 8: RMP Pitch Axis, Right Side View
Y
(Forward)
X
Θ
The variables listed below provide momentary information about the state of the RMP. For information on how to receive this data see
"User Defined Feedback Bitmaps," p. 66.
Table 1: BSA and PSE Variables
UDFB Variable Symbol Measurement Units
inertial_x_acc_g X Linear Acceleration g
inertial_y_acc_g Y Linear Acceleration g
inertial_x_rate_rps X Angular Velocity rad/s
inertial_y_rate_rps Y Angular Velocity rad/s
inertial_z_rate_rps Z Angular Velocity rad/s
pse_pitch_deg
pse_pitch_rate_dps
pse_roll_deg
pse_roll_rate_dps
pse_yaw_rate_dps
Copyright © 2014 Segway Inc. All rights reserved.
Θ
Θ'
Φ
Φ'
Ψ'
Angle (From Normal) deg
Angular Velocity deg/s
Angle (From Normal) deg
Angular Velocity deg/s
Angular Velocity deg/s
13
Page 14
RMP 210/220
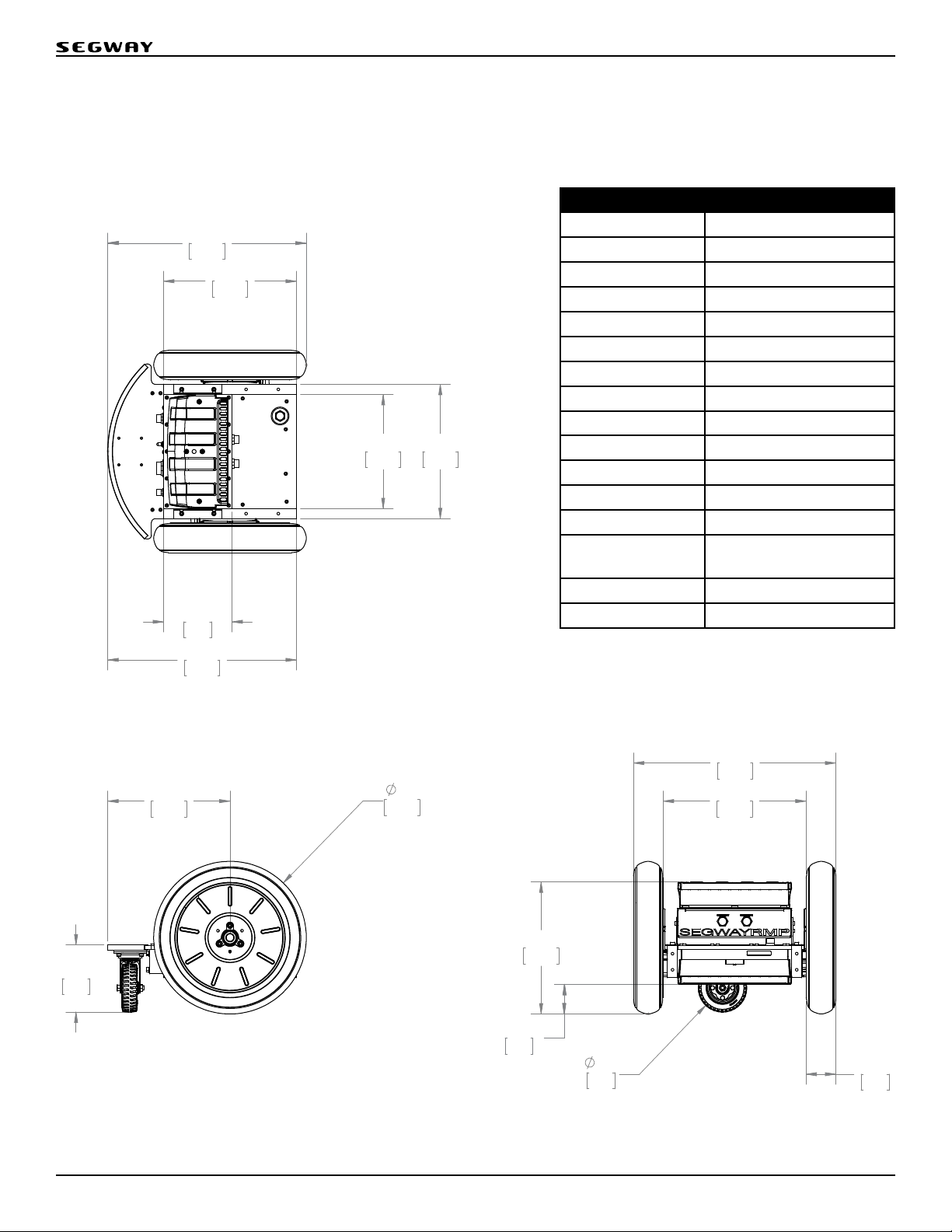
Physical Characteristics – 210
For product dimensions, please refer to the diagrams below. A summary of the major dimensions is provided in Table 2.
NOTICE
Product options may change the characteristics of the RMP.
625
24.6
419
16.5
360
14.2
216
8.5
594
23.4
423
16.7
Table 2: RMP 210 Physical Characteristics
Characteristic Value
Overall
Length 625 mm (24.6 in)
Width 637 mm (25.1 in)
Height 481 mm (18.9 in)
Chassis
Length 419 mm (16.5 in)
Width 423 mm (16.7 in)
Height 212 mm (8.3 in)
Clearance 93 mm (3.7 in)
Tires
Tire Size 19 in Segway i2 Tire
Wheel Base N/A
Track Width 544 mm (21.4 in)
Recommended
Tire Pressure
6–15 psi
Other
Weight 52 kg (115 lbs)
Figure 9: RMP 210 Top View
637
25.1
385
15.2
212
8.3
Figure 10: RMP 210 Side View Figure 11: RMP 210 Rear View
481
18.9
450
17.7
416
16.4
93
3.7
152
6.0
94
3.7
Copyright © 2014 Segway Inc. All rights reserved.
14
Page 15

RMP 210/220
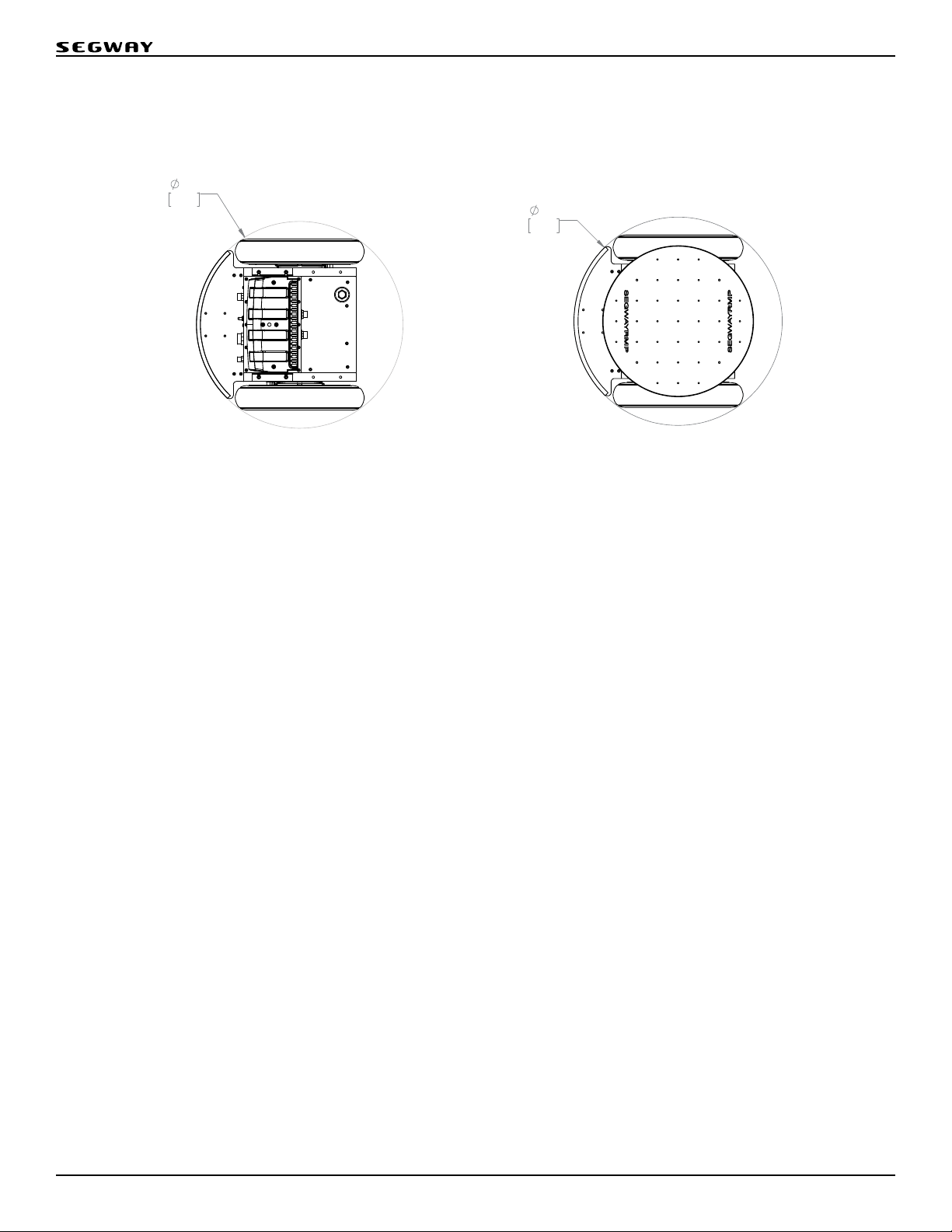
Physical Characteristics – 220
For product dimensions, please refer to the diagrams below. A summary of the major dimensions is provided in Table 3. The RMP is shown
here with a caster plate attached; the caster plate is an optional accessory for non-balancing RMPs.
NOTICE
Product options may change the characteristics of the RMP.
665
26.2
626
24.6
76
3.0
76
3.0
559
22.0
419
16.5
Figure 12: RMP 220 Top View
423
16.7
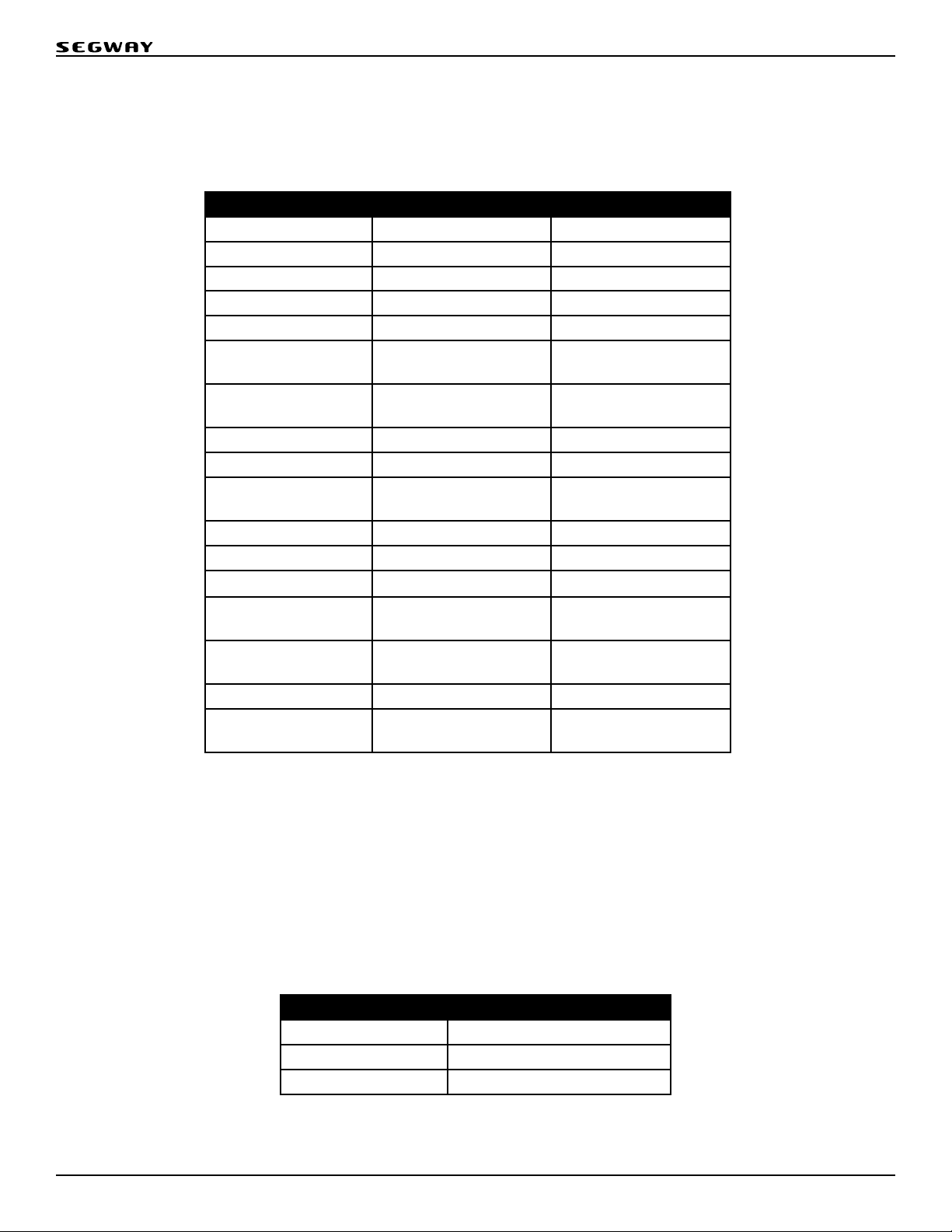
Table 3: RMP 220 Physical Characteristics
Characteristic Value
Overall
Length 664 mm (26.1 in)
Width 637 mm (25.1 in)
Height 761 mm (30.0 in)
Chassis
Length 419 mm (16.5 in)
Width 423 mm (16.7 in)
Height 212 mm (8.3 in)
Clearance 93 mm (3.7 in)
Tires
Tire Size 19 in Segway i2 Tire
Wheel Base N/A
Track Width 544 mm (21.4 in)
Recommended
Tire Pressure
6–15 psi
Other
Weight 73 kg (161 lbs)
481
18.9
212
8.3
385
15.2
Figure 13: RMP 220 Side View
343
13.5
279
11.0
761
30.0
555
21.8
Figure 14: RMP 220 Rear View
6.0
152
430
16.9
366
14.4
450
17.7
637
25.1
215
8.5
93
3.7
Copyright © 2014 Segway Inc. All rights reserved.
15
Page 16
RMP 210/220
419
229
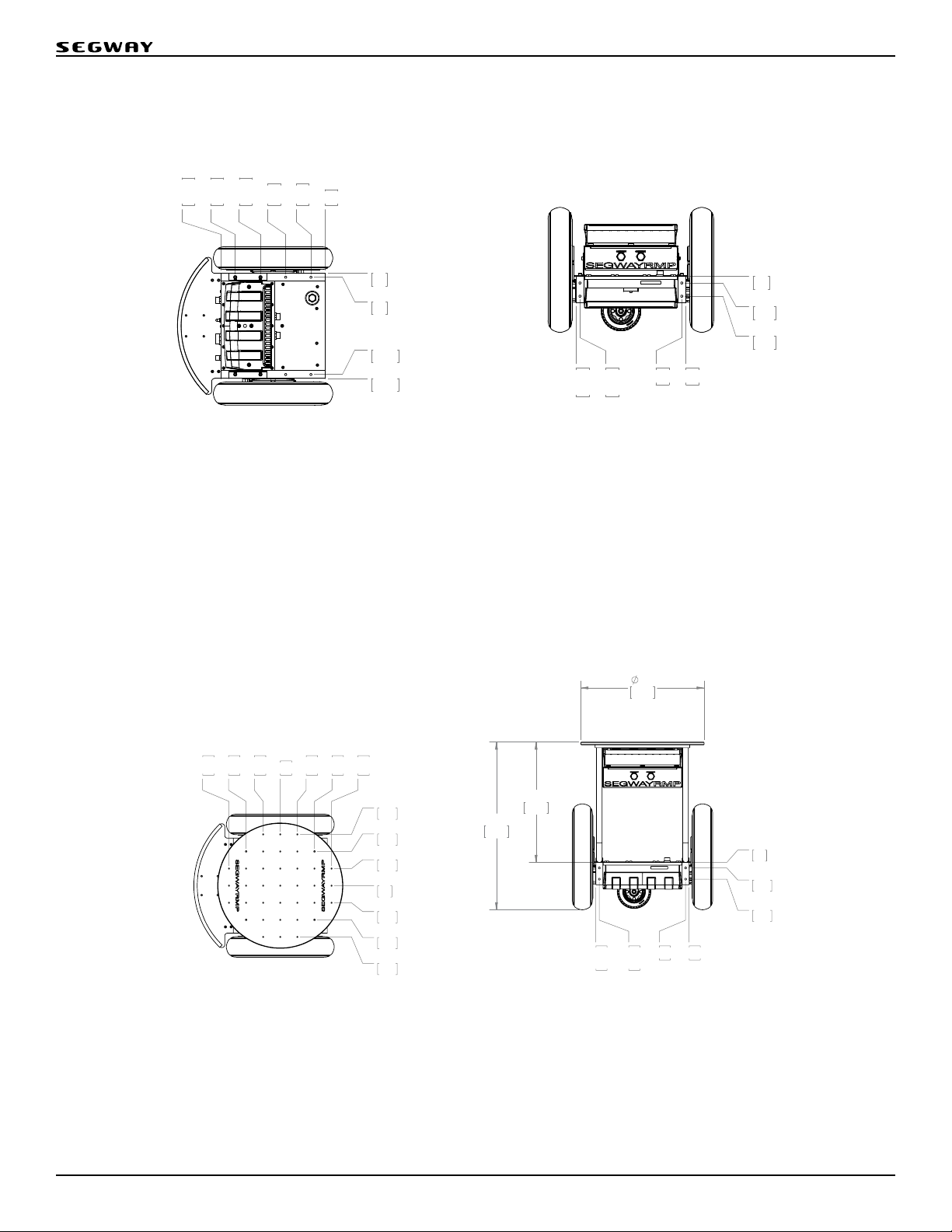
Mounting Locations — 210
Equipment can be mounted to the RMP using the provided mounting locations. Tapped holes are located on the tops and ends of the rails.
Tapped holes are M8x12. Dimensions are mm [in].
260
362
14.3
16.5
Figure 15: Top Mounting Holes
NOTICE
Only mount equipment via the provided mounting locations. Drilling holes in the enclosure or other modifications to the RMP may
adversely affect the FCC rating, IP rating, and/or structural integrity of the RMP.
10.3
159
6.3
0
57
.0
2.3
0
.0
16
.6
407
16.0
423
16.7
16.0
0
.6
.0
16
423
16.7
407
0
.0
25
1.0
76
3.0
Figure 16: End Mounting Holes
Mounting Locations — 220
The RMP 220 has all the same mounting locations as the 210. In addition, it includes a mounting plate at 761 mm (30.0 in) high. Tapped
holes are M8 through holes. Dimensions are in mm [in].
559
22.0
3.0
152
6.0
229
9.0
761
30.0
546
21.5
0
.0
25
1.0
76
3.0
423
16.7
407
16.0
0
.6
.0
16
229
9.0
152
6.0
76
3.0
0
0
.0
.0
76
3.0
152
6.0
229
9.0
Figure 18: End Mounting Holes
9.0
152
6.0
0
76
0
.0
3.0
.0
Figure 17: Mounting Plate
76
Copyright © 2014 Segway Inc. All rights reserved.
16
Page 17
Turn Envelope
771
The RMP can turn in place, so its turn envelope is very small. Both the 210 and the 220 have the same turn envelope.
The caster plate is designed to fit within the turn envelope.
RMP 210/220
30.4
Figure 19: Turn Envelope, RMP 210
771
30.4
Figure 20: Turn Envelope, RMP 220
Copyright © 2014 Segway Inc. All rights reserved.
17
Page 18

RMP 210/220
User Interface Panel
The power switch, LEDs, and external connectors for the RMP are all located on the User Interface Panel on the rear of the RMP. Users
should familiarize themselves with the various connectors and LEDs. For information on the connectors and what plugs into them see
"Connecting," p. 41.
Figure 21: Interface Panel
ON/OFF Switch
Use this switch to power on and off the RMP.
Power and Status LEDs
These two LEDs indicate what mode the RMP is in. They can be used to troubleshoot startup issues. See "Powering On/Off," p. 40, for a
list of what the LEDs indicate.
Connector I
This connector is used for communication and for auxiliary power. Communication available through this connector includes Ethernet,
USB, and CAN. Auxiliary power available depends on the Power Converters installed. Up to two different DC voltages can be made
available. The Starter Breakout Harness connects here.
Connector II
The Disable Button connects here. The Disable signal must be sent for normal operation. Other signals include: the Decel Request, used
to initiate a Decel to Zero (DTZ); the Boot1 signal, used to enter Diagnostic mode; and the Boot2 signal, used to enter Bootloader mode.
Connector IV
This connector is used in conjunction with the External Power Supply for charging the batteries of the RMP. For more information on
charging see "Charging," p. 39.
Charge Status LEDs
When charging the batteries, the Charge Status LEDs will light up, indicating the status of each of the batteries. Each LED corresponds to
a specific battery. For more information see "Charging," p. 39.
Auxiliary Battery
Auxiliary Battery
Front
Figure 22: Battery Locations, 210
Copyright © 2014 Segway Inc. All rights reserved.
Battery 0
Front
NOTICE
Caster Plate is not
standard on the RMP 220.
Battery 0 Battery 1
Figure 23: Battery Locations, 220
18
Page 19

RMP 210/220
Powerbase Connections
On the side of the enclosure there are two powerbase connectors. The left-hand connector goes to the powerbase; the right-hand one
is unused. If two powerbases are used, the right-hand connector goes to the rear powerbase. The powerbase must be plugged into the
proper connector for the charge status LEDs to be correct.
Figure 24: Powerbase Connections
Connector V
Connect the powerbase to this jack.
Connector VI
Cover this jack with the protective cap.
Copyright © 2014 Segway Inc. All rights reserved.
19
Page 20
RMP 210/220
Performance Specifications
The RMP is driven by two independent and fully redundant brushless DC drive motors. It can operate both outdoors and indoors.
Traversable terrain includes asphalt, sand, grass, rocks, and snow.
Table 4: Performance Specications
Characteristic 210 220
Mobility
Max. Speed 8.0 m/s (18 mph) 8.0 m/s (18 mph)
Max. Speed Balancing N/A 4.5 m/s (10 mph)
Turn Radius 0 minimum 0 minimum
Turn Envelope 771 mm (30.4 in) 771 mm (30.4 in)
Max. Slope
Peak Torque
1
20°
50 N-m (37 lb-ft) 100 N-m (74 lb-ft)
(Each Wheel)
Maximum Range
2
25 km (15 mi) 50 km (30 mi)
Power
Batteries
Run Time
3
1 Propulsion Battery
1 Auxiliary Battery
Up to 24 hours Up to 24 hours
Charge Time 2-3 hours 2-3 hours
Battery Chemistry LiFePO
Propulsion Battery
4
380 Wh each 380 Wh each
Capacity
Auxiliary Battery
380 Wh 380 Wh
Capacity
Payload
Max. Payload 400 lbs
10° non-balancing
5° balancing
2 Propulsion Batteries
1 Auxiliary Battery
LiFePO
4
100 lbs4 (Balance Mode)
400 lbs (Tractor Mode)
1
Based on an unloaded platform.
2
Based on an unloaded platform with 15 psi tires travelling in a straight line on level pavement. Actual performance may vary.
3
Run time based on a stationary RMP running on internal battery power. Extended run time is possible with charger connected.
4
Maximum payload in Balance Mode is determined by the gain schedule (page 23). It is possible to use higher payloads with custom gain schedules.
Environmental Specifications
The Segway RMP was designed to withstand environmental conditions both indoors and outdoors.
Table 5: Environmental Specications
Characteristic Value
Operating Temp. Range 0°–50° C
Storage Temp. Range -20°–50° C
Ingress Protection
4
Batteries must be installed in order for enclosure to be fully sealed.
Copyright © 2014 Segway Inc. All rights reserved.
4
Designed to meet IP66 / NEMA 4
20
Page 21

RMP 210/220
Transportation and Shipping
NOTICE
Lithium-ion batteries are regulated as "Hazardous Materials" by the U.S. Department of Transportation. For more information, contact the
U.S. Department of Transportation at http://www.phmsa.dot.gov/hazmat/regs or call 1-800-467-4922.
To prevent damage to your RMP, always ship it in the original crate it came in. The crate disassembles for storage. If you do not have the
original crate, contact Segway for a replacement (see "Contact Information," p. 6).
Copyright © 2014 Segway Inc. All rights reserved.
21
Page 22
RMP 210/220
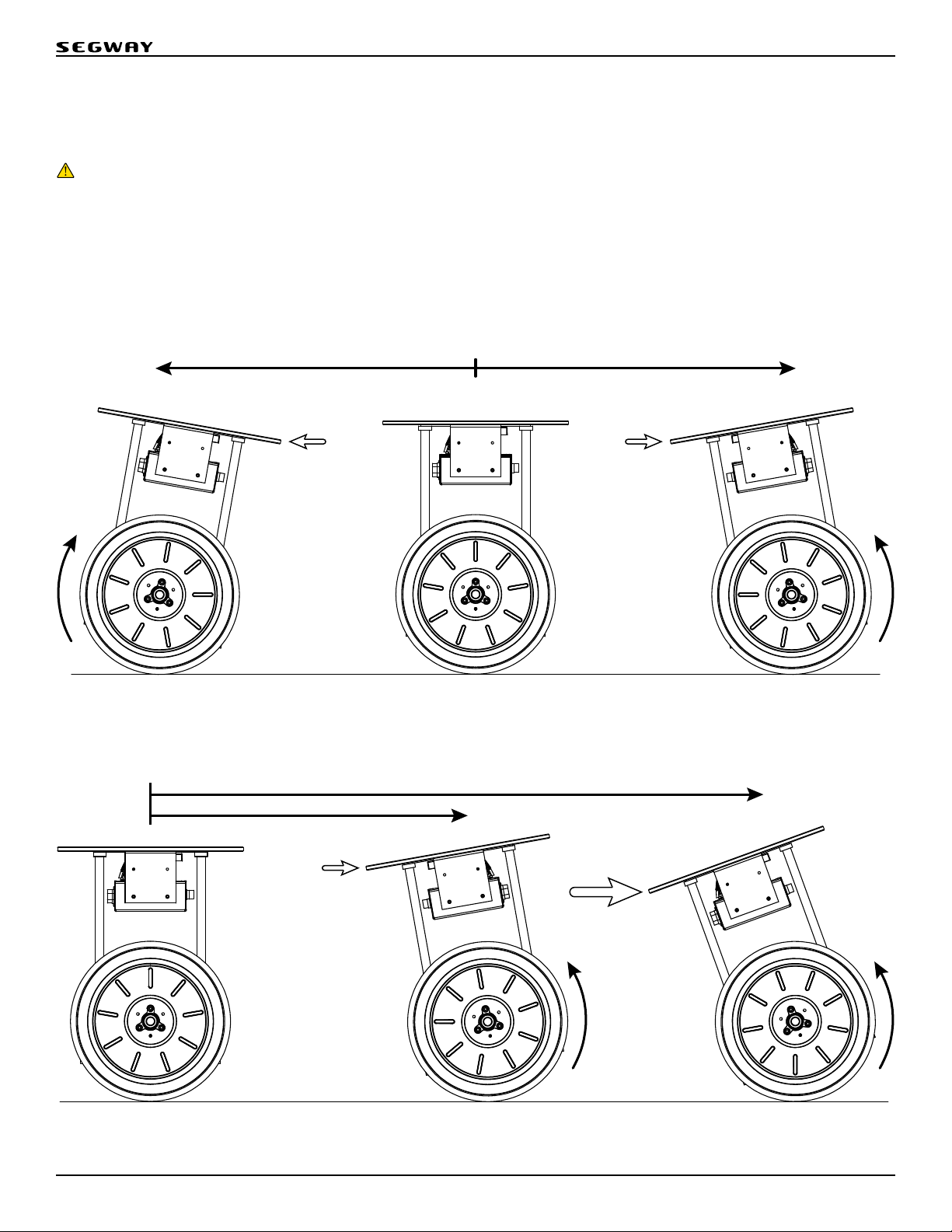
Balancing
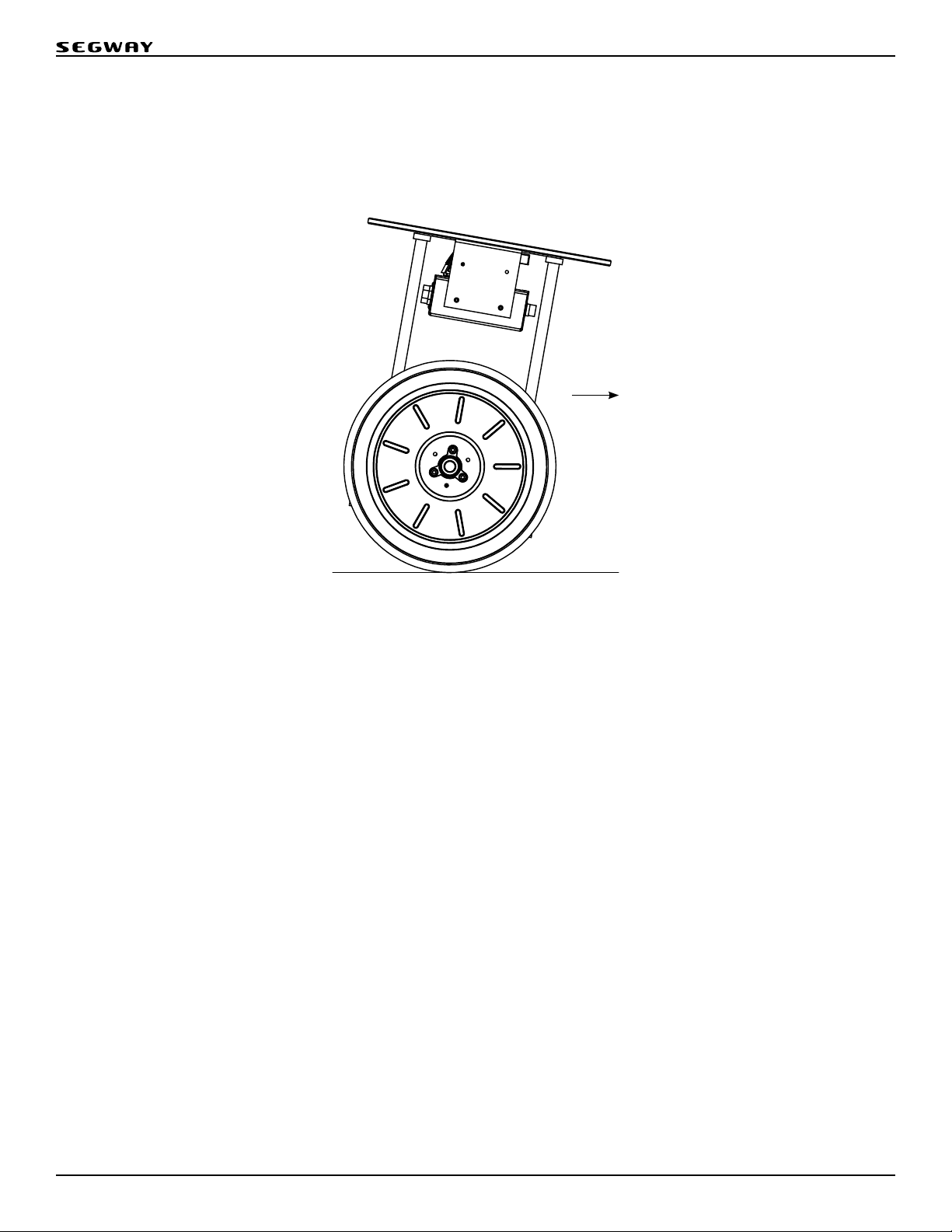
In Balance Mode the RMP balances on two wheels and accepts motion commands. As in Tractor Mode, it can be commanded to drive
forward, backward, and turn left/right. When moving, the RMP tilts slightly in the direction of motion (see Figure 25).
Figure 25: Driving to the Right
In order to enter Balance Mode a mode transition is commanded (see "RMP_CMD_SET_OPERATIONAL_MODE," p. 59). Then the RMP
is tipped upright. When it is vertical, the RMP will begin balancing. At this point the RMP may rock back and forth as it gains its balance.
Do not hold onto the RMP or restrict its movement in any way. Allow it to balance on its own.
NOTICE
When standing still, the RMP may rock forward and backward slightly. This is normal. The RMP is simply maintaining its balance.
Any outside force applied to the RMP while it is balancing will cause it to react. For example, if the RMP is standing still and you press
down on the front of the mounting plate the RMP will tilt. The RMP will push back, attempting to drive forward and tipping the front of the
mounting plate up. For more information on how the RMP will act in a variety of situations, read the rest of this chapter.
Copyright © 2014 Segway Inc. All rights reserved.
22
Page 23

RMP 210/220
Payload Gain Schedules
In order to balance safely and accurately the controller's gain schedules must be precisely tuned for a given payload and weight
distribution. Four pre-defined gain schedules can be selected, and Segway can create custom gain schedules for specific applications.
CAUTION!
The Tall configuration requires extra care. Small tilt angles can result in large relative displacements of the wheel and upper payload.
Each gain schedule has been optimized for a particular payload at a particular height. For best performance, the user should endeavor to
combine their payload with ballast to reproduce mass properties that are close to the configurations defined below.
In general, all gain schedules operate with a wide range of payloads. Choosing the gain schedule that best fits a user's payload has one
main advantage: the handling and dynamics of the RMP will be better damped and more predictable. While each of the gain schedules
can balance a wide variation in payload, the degree of oscillation and control activity will change as the payload is altered. For example,
both the Light and Heavy gain schedules can handle a 75 lb payload on the mounting plate, however the response of each controller will
be slightly different in the presence of disturbances. Note that the Tall payload configuration will not balance with the Light or Heavy gain
schedules.
The gain schedule is assigned when the RMP enters Balance Mode. Changes to the gain schedule cannot be performed while in Balance
Mode. The RMP will have to enter Tractor Mode for the gain schedule to change.
25 lbs
750 mm
25 lbs
Figure 26: Unloaded Figure 27: Light Figure 28: Tall Figure 29: Heavy
Unloaded (Default)
Use this gain schedule for an RMP with no additional mass loaded
onto it. This is the default gain schedule.
NOTICE
This physical playform configuration represents the minimum
mass ballast required for safe operation in Balance Mode.
Light
Use this gain schedule for an RMP with a 50 lb (22.7 kg) payload
mounted directly on the mounting plate.
Tall
Use this gain schedule for an RMP with 25 lbs (11.3 kg) mounted
on the mounting plate and an additional 25 lbs (11.3 kg) mounted
Custom
Custom gain schedules can be created for specific applications
and payloads. The gain schedule parameters are stored in NVRAM
so they will not be forgotten across reboots. Contact Segway for
more information ("Contact Information," p. 6).
750 mm (29.5 in) above the mounting plate.
Heavy
Use this gain schedule for an RMP with 100 lbs (45.4 kg) mounted
directly on the mounting plate.
100 lbs50 lbs
Copyright © 2014 Segway Inc. All rights reserved.
23
Page 24
RMP 210/220
Balance Mode Requirements
In order to safely balance, the RMP must meet the following requirements.
• Ability to tip to 45° (to safely allow the RMP full maneuverability).
• Correct weight distribution as per the gain schedule selected (see "Payload Gain Schedules," p. 23).
CAUTION!
The Balance Frame Assembly (Tube Frame, U-Bracket for high mounting of User Interface Box, and Mounting Plate) provides the
minimum mass ballast required for operating in Balance Mode and must be installed as shown before entering Balance Mode. Optional
brackets for mounting the User Interface Box low are available, but are not compatible with Balance Mode operation.
Also, before entering Balance Mode the Balance Enable Bit must be set to 1. See "RMP_CMD_SET_INPUT_CONFIG_BITMAP," p. 55. The
purpose of this bit is to lock out Balance Mode in situations where it would be unsafe to enter Balance Mode.
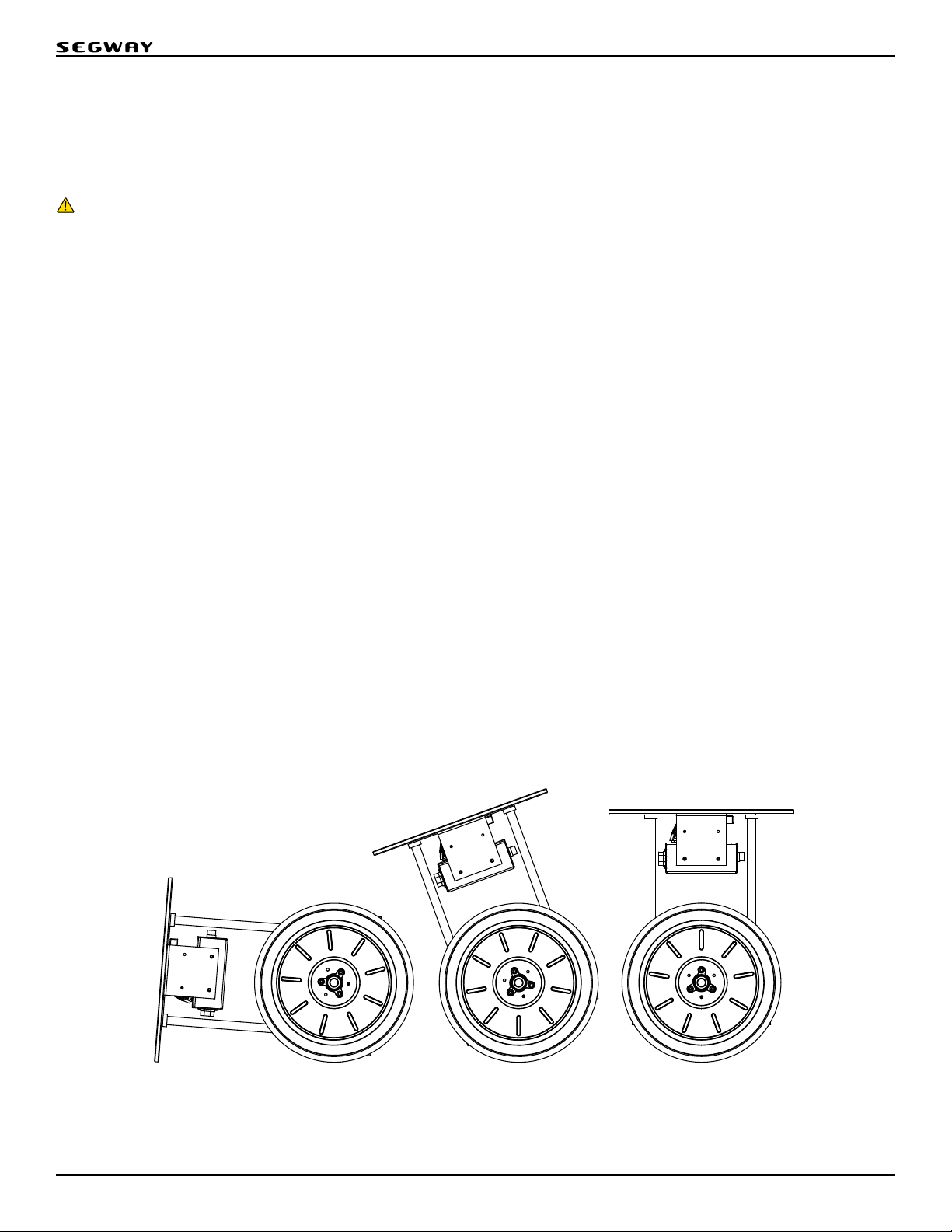
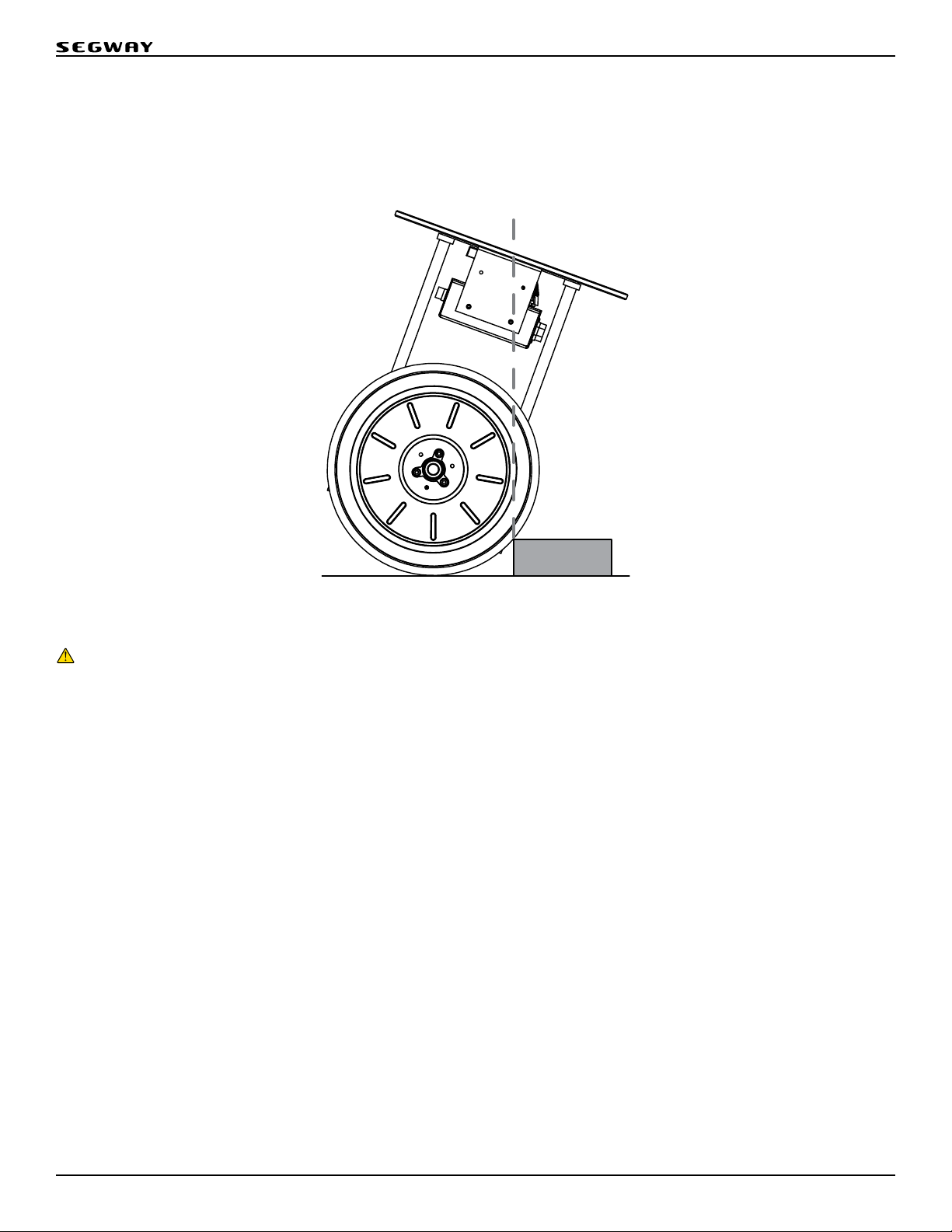
Entering Balance Mode
The RMP will enter Balance Mode if:
• Balance Mode is enabled (see "RMP_CMD_SET_INPUT_CONFIG_BITMAP," p. 55).
• A Balance Mode transition is commanded.
• The BSA is initialized.
• The RMP crosses the vertical axis.
The BSA initializes when the RMP is within 30° of vertical and takes a few seconds to occur. During this time the RMP should remain
stationary.
1. Verify that the RMP meets the Balance Mode Requirements.
2. Turn on the RMP.
3. Command a transition to Balance Mode (see "Hardware Balance Request," p. 31 and
"RMP_CMD_SET_OPERATIONAL_MODE," p. 59).
The RMP will make a emit a beep-beep sound if the BSA is not initialized.
4. Tip the RMP upright until it is vertical (see Figure 30).
Once the BSA initializes, the beep-beep sound will change to a repeating beep.
The RMP will beep with increasing frequency as it approaches vertical.
5. Allow the RMP to balance on its own.
You can now send motion commands.
Copyright © 2014 Segway Inc. All rights reserved.
Figure 30: Tip the RMP Upright When Entering Balance Mode
24
Page 25
RMP 210/220
Exiting Balance Mode
When exiting Balance Mode the RMP will stop balancing and will tip over. Be prepared to catch the RMP if you do not want it to slam into
the ground.
1. Bring the RMP to a stop.
2. Exit Balance Mode by commanding a mode transition (see "RMP_CMD_SET_OPERATIONAL_MODE," p. 59).
3. Catch the RMP as it begins to tip over.
WARNING!
Do not let the RMP fall onto your foot or other part of your body. The mounting plate is heavy and could cause injury.
The RMP can exit Balance Mode in a variety of ways. Any mode transition out of Balance Mode will cause the RMP to stop Balancing
(transitioning to Standby Mode, Tractor Mode, Disable Mode, etc.). Also, toggling the Power Switch OFF will cause the RMP to stop
balancing.
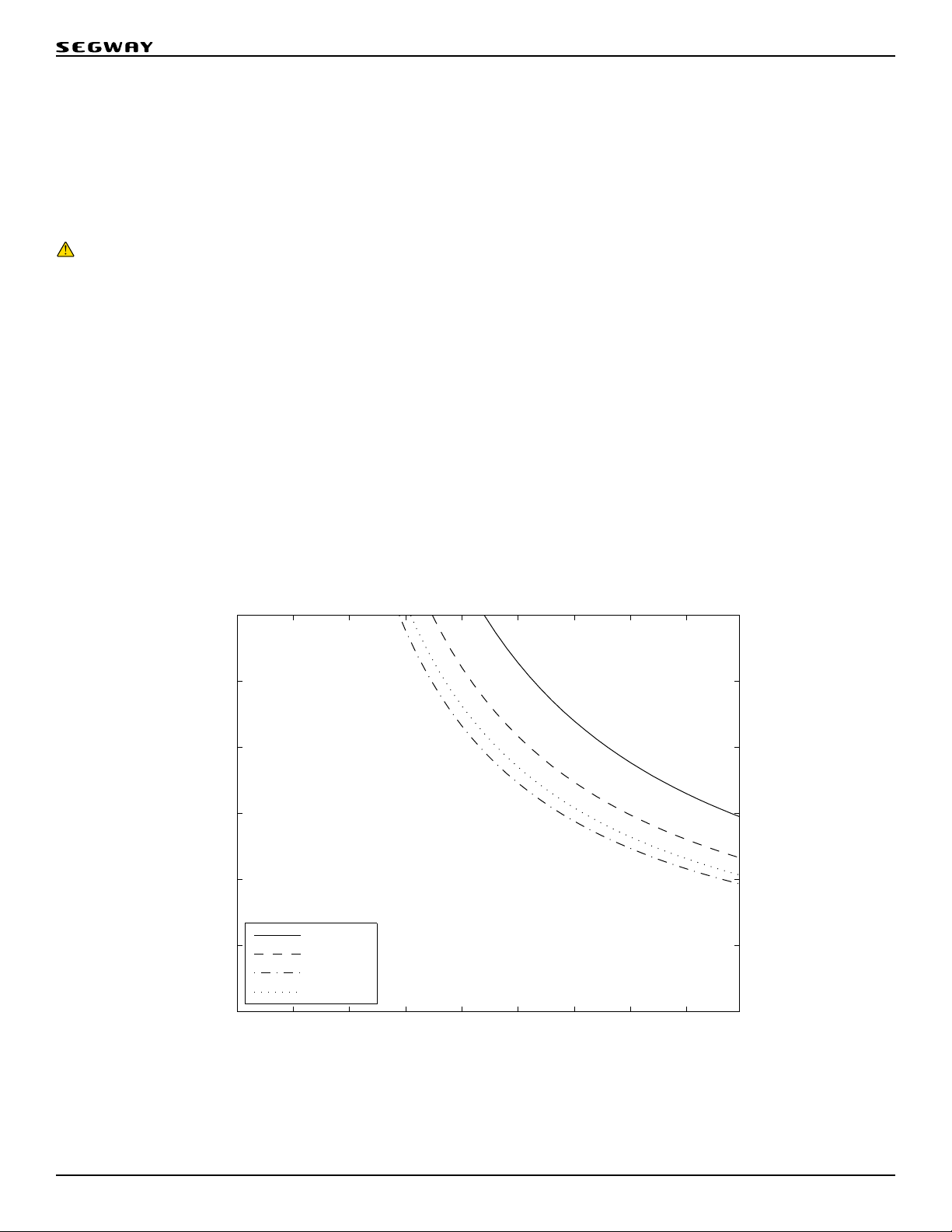
Performance Limits
Roll Over
In order to balance the RMP needs to have its payload mounted relatively high. This is because the RMP operates as an inverted
pendulum while balancing. Unfotunately, the property that helps the RMP to balance (a high center of mass) also makes the RMP more
likely to roll over.
Figure 31 shows how velocity and yaw rate combine to make the RMP roll over. The area above the curve(s) is where the RMP is likely to
roll over. This graph assumes that the RMP is operating on level ground. Any slope, however slight, will increase the likelihood of roll-over.
Roll Over Performance Limits
3
2.5
2
1.5
yaw rate [rad/s]
1
0.5
0
0 0.5 1 1.5 2 2.5 3 3.5 4
Unloaded
Light
Tall
Heavy
velocity [m/s]
4.5
Copyright © 2014 Segway Inc. All rights reserved.
Figure 31: Roll Over Performance Limits
25
Page 26

RMP 210/220
Turn Radius
The RMP's speed and yaw rate can be used to calculate the turn radius. Higher speeds increase the turn radius while higher yaw rates
decrease it. Be sure not to exceed the Roll Over limit described above.
R =
V
Y
Where,
R = Turn Radius (m)
V = Velocity (m/s)
Y = Yaw Rate (rad/s)
This equation provides the turn radius to the center of the RMP. To calculate the radius to the outside of the RMP just add half of the
RMP's width (~0.32 m) to the final radius.
Using this equation and the Roll Over limit, the minimum safe turn radius can be determined for a variety of speeds.
Stopping Distance
Changing the deceleration limit can have a big effect on how far the RMP travels as it slows to a stop. If the RMP cannot stop soon enough
it may collide with obstacles. If it stops too quickly it may tip far enough and fast enough to jostle equipment or startle bystanders.
Because of this it is important to reach a balance between stopping distance and tip angle.
These same principles also apply to the DTZ deceleration limit and the acceleration limit. The DTZ decleration limit controls the rate at
which the RMP will come to a stop when a DTZ command is issued or when a fault triggers a DTZ response. The acceleration limit affects
how far the RMP travels while coming up to speed. Remember to set the DTZ deceleration limit high enough to stop the RMP quickly in
case of an emergency.
To calculate the stopping distance from the velocity and deceleration rate, use the following formula:
2
D =
Where,
D = Distance Travelled (m)
V = Initial Velocity (m/s)
A = Acceleration/Deceleration Rate (m/s2)
V
2A
Copyright © 2014 Segway Inc. All rights reserved.
26
Page 27
RMP 210/220
Interaction With The Environment
When the RMP makes contact with other objects in the environment, the results can be counter-intuitive at first. For recommended tire
pressure please refer to page 108.
WARNING!
Read and understand this section before operating an RMP in Balance Mode. Proper understanding of how the RMP will act is necessary
to avoid personal injury and property damage.
Displacement
If the RMP is displaced from its desired position, it will lean against the displacement force, creating a new equilibrium position. The
harder it is pushed, the more it will lean.
∆X ∆X
Desired Position
Desired Position
Figure 32: Displacement Direction
2∆X
∆X
Copyright © 2014 Segway Inc. All rights reserved.
Figure 33: Displacement Magnitude
27
Page 28

RMP 210/220
Unable to Right Itself
If an external force causes the RMP to tip forward or backward, the RMP will attempt to right itself. This simple concept can have some
surprising consequences.
If a downward force is applied to the mounting plate, the RMP will drive in the direction that it is tipped. This could occur if someone
presses down on the mounting plate, or if the payload center of gravity is off-center. See Figure 34.
Figure 34: Downward Force
Something similar happens when the RMP gets caught under something, as is shown in Figure 35 where the mounting plate is caught
under a table. In this case the RMP will push up against the table in an attempt to right itself. The force applied by the RMP can be quite
strong, lifting the table or tipping it over.
Copyright © 2014 Segway Inc. All rights reserved.
Figure 35: Caught Under a Table
28
Page 29

RMP 210/220
Unable to Right Itself (cont.)
The situation shown in Figure 36 is very different from a dynamic standpoint, but the controller cannot differentiate between this
configuration and the ones in Figure 34 and Figure 35. In this case the RMP will accelerate faster and faster to the right trying to bring the
machine to a level equilibrium. It will quickly trip the position error limit of 12 feet and Disable.
Figure 36: Caster Wheel
A caster wheel can cause the RMP to accelerate rapidly even if it does not normally contact the ground. If the RMP hits an obstacle or
encounters a slope, the caster wheel will tip the RMP and start it accelerating in the opposite direction.
Copyright © 2014 Segway Inc. All rights reserved.
Figure 37: Caster Wheel on a Slope
29
Page 30
RMP 210/220
Obstacles
When the RMP needs to roll over an obstacle, the CG of the RMP must tilt forward over the contact point. When the tire makes contact
with the obstacle, it stops rolling and the frame tilts forward. Once the CG is over the contact point with the obstacle, the RMP will roll over
the obstacle (provided the obstacle is small and sufficient traction exists). Because torque is required to hold the tilted position, there is a
tendency to overshoot the obstacle. Approaching obstacles with a small initial velocity typically helps in traversing obstacles.
Figure 38: Crossing an Obstacle
WARNING!
• If the RMP is traveling too fast over an obstacle, the wheels could leave the ground. When this happens the RMP will have
difficulty maintaining its balance and will move very quickly trying to right itself. This could result in death or serious injury to
bystanders, or property damage.
• If there are multiple obstacles in a row, the RMP must be able to catch its balance after each one. When obstacles are too close
together the RMP will not be able to maintain its balance and will move very quickly trying to right itself. This could result in
death or serious injury to bystanders, or property damage.
Copyright © 2014 Segway Inc. All rights reserved.
30
Page 31

RMP 210/220
Balance Mode Faults
There are some faults that occur only in Balance Mode. For information on how the RMP will respond to other faults, see "Faults," p. 36
and "Fault Status Definitions," p. 82.
Pitch Angle Exceeded
If the RMP tips forward or backward greater than 30° from normal (see Θ, page 13), the RMP will Disable and power off. This is
because the BSA's Pitch State Estimate is only accurate within this range. Furthermore, if the RMP tips past 30° it is likely that it will be
difficult or impossible for it to right itself.
Roll Angle Exceeded
If the RMP tips sideways greater than 30° from normal (see Φ, page 13), the RMP will Disable and power off. This is because the RMP
will not be able to right itself and is in the process of falling over.
Speed Limiter Hazard
In order to maintain its balance the RMP must sometimes move very quickly. Usually this is acceptable, however if the RMP tries to move
too fast it is an indicator that the RMP is having difficulty righting itself. When the actual speed exceeds the the speed limiter value, the
RMP will Disable and power off.
Position Control Failed
During normal operation, the RMP will attempt to hold position when no movement is commanded. If the RMP is unable to hold position
for any reason and the wheels rotate too far from the original resting location (an equivalent of 12 feet of displacement), the RMP will
Disable and power off. This could happen if the wheels are slipping, a force pushes the RMP away from the equilibrium position, or some
other condition is preventing the RMP from reaching its equilibrium position (e.g. the RMP is lifted off the ground).
Velocity Control Failed
During normal operation, the RMP will attempt to match the commanded velocity (or hold position if no velocity is commanded). If the
RMP's actual velocity moves outside of the acceptable range, the RMP will Disable and power off. This could occur if the RMP is trying to
regain its balance after losing traction, or if some condition is preventing the RMP from reaching its equilibrium position (e.g. the RMP is
lifted off the ground).
Hardware Balance Request
A Balance Mode transition can also be commanded via a hardware button. While in Standby Mode or Tractor Mode, momentarily sending
a Boot1 signal will initiate the Balance Mode request.
A Boot1 signal is sent by connecting pins D and E on Connector II. See "Connector II," p. 43.
Sending a Boot1 signal while in Balance Mode will not cause a transition out of Balance Mode. Instead a mode request must be made to
transition to Standby Mode, Tractor Mode, Disable Mode, or DTZ.
Velocity Filter
When in Balance Mode the RMP can tip quite suddenly, especially when large changes in velocity are commanded. To mitigate this a
velocity filter can be applied that smooths velocity transitions by limiting the rate at which the acceleration rate can change. For more
information see "Velocity Filter," p. 65.
Copyright © 2014 Segway Inc. All rights reserved.
31
Page 32

RMP 210/220
Electrical Overview
This section describes the components of the RMP and shows how they interact.
System Architecture
The RMP combines the robustness of the Segway powerbase with a versatile Centralized Control Unit (CCU). The powerbase is the same
proven technology used in the Segway PT. It controls the wheels, senses the RMP's orientation, and provides a mounting location for the
batteries. The Centralized Control Unit coordinates the RMP's movement and controls communication among all the components. It acts
as the interface between the RMP and the outside world. The diagram below shows how these components communicate with each other.
Figure 39: System Architecture Diagram
System Power
The RMP runs on rechargeable batteries. Power is routed from the batteries to the various components of the system. DC power is
available for customer use.
Figure 40: System Power Diagram
Copyright © 2014 Segway Inc. All rights reserved.
32
Page 33

RMP 210/220
Front
System Components
A brief overview of each component is provided to help you become familiar with these components and their functions.
Centralized Control Unit
The Centralized Control Unit (CCU) contains the Segway Processor (SP)
and the User Interface Processor (UIP). These processors use synchronized
timing to control the RMP in real time. They communicate via a Serial
Peripheral Interface (SPI) link.
Segway Processor
The SP controls essential system functions including timing
management, control algorithms, safety kernel functions, redundancy
management, estimation algorithms, and Segway hardware interfaces.
In addition, a real time clock and Non-Volatile Memory (NVM) allow for
diagnostic fault logging.
User Interface Processor
Figure 41: Centralized Control Unit
The UIP controls the interaction between the user and the RMP. It allows the user to command RMP motion, configure machine
parameters, and access faultlog information.
The UIP consists of four layers: System layer, I/O layer, Toolkit layer, and Application layer.
1. The System layer manages hardware-specific functionality like interrupts and timing.
2. The I/O layer manages all processor I/O including GPIO, ADC, DAC, CCP, USB, UDP, CAN, RS232, TTL Serial, and the SPI link.
The I/O layer is responsible for gathering all raw UIP data and presenting it to the Toolkit layer.
3. The Toolkit layer abstracts the information gathered by the I/O layer and interprets it into meaningful system level data. The
Toolkit layer then relays that information to various interfaces for consumption by the user.
4. The Application layer consists of an application stump for future expansion and development of the system.
Powerbase
The powerbase is one of the main components of the Segway PT and has been leveraged for use as the propulsion unit of the RMP.
Each RMP 220 has one powerbase that controls both wheels. Inside the powerbase are two Motor Control Units (MCUs) and a BSA. The
powerbase is not serviceable by the user; this information is provided for completeness only.
Motor Control Unit
The MCU is a Segway motor drive. It utilizes the robustness of the
Segway PT propulsion system as a motor drive. Each MCU has two motor
drives that drive half of a dual hemisphere Segway motor. Each MCU
performs its own internal fault detection and communicates with the SP
via CAN interface. The user does not have access to the MCU interface.
MCU 0
Balance Sensor Assembly
The BSA provides redundant raw three-axis inertial data to the SP. The
SP uses this information to compute the Pitch State Estimate (PSE). The
PSE algorithm estimates the machine orientation and movement based
on the combined raw inertial information and wheel odometry.
BSA
MCU 1
Copyright © 2014 Segway Inc. All rights reserved.
Figure 42: Segway Powerbase
NOTICE
Caster Plate is not standard on the RMP 220.
33
Page 34

Smart Charger Board
The Smart Charger Board (SCB) distributes charging current from the
External Power Supply to the ABB and both powerbases. It controls multiple
high current smart chargers and manages charging. It has 5 monitored
channels at 100 VDC each and can perform fault detection down to the level
of the power supply, board, and battery.
Auxiliary Battery Board
The Auxiliary Battery Board (ABB) monitors voltage, current, state of charge,
and battery flags of the auxiliary battery pack. It has software protected
outputs to prevent over-discharge of the battery. The board can act as a
standalone unit or can connect to the CCU. It interfaces with the UIP via CAN
and provides real-time battery data and status information for the auxiliary
battery pack. The ABB can communicate via CAN, USB, and RS232.
If the fuse blows, the entire board must be replaced.
RMP 210/220
Figure 43: Smart Charger Board
Power Converter
The RMP 220 accommodates up to two Power Converters. Each Power
Converter accepts 72 VDC input power and provides DC output power at a
different voltage. One Power Converter provides 12 VDC power for internal
use and customer use. The other Power Converter is selectable at time of
purchase. Output voltage options include 5 VDC, 12 VDC, 24 VDC, 36 VDC,
and 48 VDC.
Figure 44: Auxiliary Battery Board
Figure 45: Power Converter
Copyright © 2014 Segway Inc. All rights reserved.
34
Page 35

Operational Model
This chapter describes powering on, powering off, and the various modes of operation.
Operational States
At any given time, the RMP will be in one of the following operational states:
• Initialization
• Diagnostic Mode
• Bootloader Mode
• Standby Mode
• Tractor Mode
• Balance Mode
• Disable Mode
• DTZ Mode
• Off
Figure 46 shows how these states interact. Each of these states is discussed in more depth on the following pages.
RMP 210/220
Figure 46: System State Diagram
Copyright © 2014 Segway Inc. All rights reserved.
35
Page 36

RMP 210/220
Faults
Faults occur in response to events that impact the RMP. This could include anything from receiving a user-commanded DTZ signal
to detecting a failed battery. Sometimes faults are the result of a problem that needs to be resolved. Other times they are merely
informative.
In response to a fault the RMP may simply log the fault or it may take an action. There are four types of fault responses:
• No fault response — fault is logged. No change in RMP behavior.
• DTZ response — fault initiates a Decel To Zero. RMP comes to a stop, logs the fault, and maintains position. Transitions to
Balance Mode or Tractor Mode are disabled.
• Disable response — fault causes RMP to power off. RMP logs the fault and powers off immediately.
• Disable MCU response — fault causes a single MCU to go down. RMP will continue to balance (if applicable) and hold position.
Initialization
Initialization is composed of three sub-states: Init Hardware, Init Propulsion, and Check Startup Issues. First, the hardware is initialized;
this includes the CCU and ABB. Then, propulsion is initialized (the MCUs and BSA). If there are no issues with the system, the RMP
transitions to Standby Mode. Otherwise it shuts down.
If the BOOT1 or BOOT2 signal is pulled low the RMP will enter Diagnostic Mode or Bootloader Mode, respectively.
Init Hardware
During Init Hardware, the following steps are performed:
1. UIP and SP initialize hardware, interrupts, and software.
2. UIP and SP synchronize their timing.
3. UIP-SP communication is established.
4. SP reads configuration parameters from NVM, initializes dependent data, and passes the parameters to the UIP for UIP
dependent data initialization.
5. UIP and SP verify configuration validity.
6. SP extracts the faultlog from NVM and relays the faultlog array to the UIP for user access.
Init Propulsion
During Init Propulsion the SP initializes each MCU using a state machine. Each state verifies a certain MCU operational status. If any MCU
is not operating as expected, the RMP will transition to Disable Mode and power off. Information regarding the failure is stored in the
faultlog
Check Startup Issues
In this sub-state the SP checks for various parameters that will gate entry to Standby Mode. When the RMP detects an issue, Standby
Mode entry is gated and the RMP will emit a tone and blink the LEDs for five seconds before failing initialization. If the issue is corrected in
this time, the transition to Standby Mode will be allowed.
The following issues will gate transition to Standby Mode:
• An MCU declares a fault.
• The RMP is charging (this can be overridden: see "RMP_CMD_SET_INPUT_CONFIG_BITMAP," p. 55).
• An MCU battery open circuit voltage is below the operational threshold.
• An MCU battery state of charge is below the operational threshold.
• 7.2 VDC battery (if present) has low or high voltage.
• Any detected machine motion (RMP moving un-commanded).
• Tractor mode request is present from the user.
• BSA communication has not been established.
Copyright © 2014 Segway Inc. All rights reserved.
36
Page 37

RMP 210/220
Diagnostic Mode
In Diagnostic Mode the RMP stays in the Init System state without transitioning to Standby Mode. In this mode the RMP has initialized
the CCU and ABB, but has not initialized propulsion. The user can communicate with the RMP but cannot command it to move. This mode
allows the user to update configuration parameters and extract the faultlog without fully initializing the RMP; this is useful when a fault
causes the RMP to shutdown before entering Standby Mode.
In this state the RMP will remain on as long as power is available.
To enter Diagnostic Mode:
1. Turn the RMP off.
2. Connect pins D and E on the 6-pin connector (for the full pinout, see "Connector II," p. 43).
3. Use the USB cable to connect the RMP to the computer. The RMP will power on.
This will pull the BOOT1 signal low. The RMP will begin initialization but will stop at Init System and remain there.
Bootloader Mode
In Bootloader Mode, the RMP remains in the bootloader stage without continuing on to the RMP applications. The user can then load new
applications into either of the processors using the Bootloader Application (see "RMP CCU Bootloader Application," p. 101).
In this state the RMP will stay powered as long as USB power is available.
To enter Bootloader Mode:
1. Turn the RMP off.
2. Connect pins D and F on the 6-pin connector (for the full pinout, see "Connector II," p. 43).
3. Use the USB cable to connect the RMP to the computer. The RMP will power on.
This will pull the BOOT2 signal low. The RMP will stop at the bootloader stage without loading any applications or beginning initialization.
Standby Mode
In Standby Mode the RMP is fully functional with the exception that motion commands are not executed. The MCUs are enabled, the
controllers are initialized, and the RMP is holding its position. Any motion commands issued will not be executed by the platform.
Standby mode is entered automatically after successful initialization. From here the user can initiate a transition to tractor mode or
disable the RMP.
Tractor Mode
In Tractor Mode the RMP will accept motion commands from the user. In this mode the RMP can be commanded to move. The MCUs are
enabled and the controllers are running. Motion commands issued by the user will be accepted.
Tractor Mode can only be entered from Standby Mode as the result of a user mode request (see "RMP_CMD_SET_INPUT_CONFIG_
BITMAP," p. 55). From here the user can initiate a transition back to Standby Mode or can disable the RMP.
Balance Mode
In Balance Mode the RMP will balance on two wheels and will accept motion commands from the user. The RMP's actions in Balance
Mode are not always intuitive. For more information see "Balancing," p. 22.
Balance Mode can be entered from both Standby Mode and Tractor Mode as a result of a user mode request (see "RMP_CMD_SET_
OPERATIONAL_MODE," p. 59) or by sending a hardware Boot1 signal ("Additional Signals," p. 43). From here the user can initiate a
transition to Standby Mode, Tractor Mode, or Disable Mode.
Copyright © 2014 Segway Inc. All rights reserved.
37
Page 38

RMP 210/220
Disable Mode
WARNING!
When the RMP powers off it may continue to move (for example, it could roll downhill). This could cause serious personal injury and
property damage.
CAUTION!
If the RMP is in Balance Mode, entering Disable Mode will cause the RMP to fall over.
In Disable Mode the RMP performs housekeeping functions and then powers off. In this mode the propulsion drives are disabled and all
user commands are ignored.
In this mode the following actions are performed:
1. Drives are disabled via software and hardware.
2. The ABB shuts down the protected +72 V output.
3. The processors go into reset.
4. The RMP powers off.
If the RMP is powered off via the on/off switch, none of the above housekeeping functions are performed. The recommended way to
power off the RMP is to send a powerdown request (see "RMP_CMD_SET_OPERATIONAL_MODE," p. 59, and "Powering Off," p. 40).
Disable Mode can be entered at any time via user command (see "General Command Structure," p. 48). Some faults will also cause a
transition to Disable Mode.
Decel To Zero (DTZ) Mode
In DTZ Mode, the RMP decelerates at the DTZ Decel Rate (see "RMP_CMD_SET_MAXIMUM_DTZ_DECEL_RATE," p. 53) until it reaches
zero velocity (no movement). The RMP beeps and holds position indefinitely until the RMP is powered off. In this mode, all motion
commands are ignored.
DTZ Mode can be entered at any time via user command (see "RMP_CMD_SET_OPERATIONAL_MODE," p. 59) or hardware command
(see "Connector II," p. 43). Some faults will also cause a transition to DTZ Mode.
Copyright © 2014 Segway Inc. All rights reserved.
38
Page 39

Charging
RMP 210/220
WARNING!
Do not plug in the charger if the charge port, power cord, or AC power outlet
is wet. You risk serious bodily injury or death from electric shock as well as
damage to the RMP.
CAUTION!
Failure to charge the batteries could result in damage to the batteries. Left
unplugged, the batteries could fully discharge over time, causing permanent
damage. Use only charging devices approved by Segway.
The RMP requires the External Power Supply to charge the batteries. This
power supply converts AC power to DC power for use by the RMP. The Smart
Charger Board inside the RMP distributes this power as needed to the
batteries for charging.
Charging requires that the temperature be within 10° C – 50° C and the
humidity be <90%, non-condensing.
Using the External Power Supply
An External Power Supply is supplied with the RMP.
The charge port (Connector IV) is located on the interface panel next to the
Charger Status LEDs.
1. Make sure the ambient temperature is between 10° C – 50° C and
the humidity is less than 90% non-condensing.
2. Make sure the RMP is powered off.
3. Connect the External Power Supply to the charge port on the RMP
(Connector IV).
4. Plug the power cord into the IEC connector on the External Power
Supply and into a grounded AC outlet (100 – 240 V, 50 – 60 Hz).
5. Toggle the power switch on the External Power Supply to the ON (l)
position.
6. Charge new batteries for 12 hours. To fully charge in-use batteries,
charge for about two hours.
7. When charging is complete, toggle the power switch to the OFF
position, unplug the External Power Supply from the grounded AC
outlet, and disconnect the External Power Supply from the RMP.
Table 6: External Power Supply Input/Output
Characteristic Value
Input Voltage 100 – 240 VAC, 50 – 60 Hz
Input Current 12 A Maximum
Output Voltage 57 – 95 VDC
Output Current 2.1 A per channel
Figure 47: User Interface Panel
Figure 48: External Power Supply
Charge Status LEDs
There is one LED for each 72 V Segway battery attached to the RMP. When
charging, the LEDs turn green. If a battery is at maximum charge, its LED
blinks. See Table 7 for a complete list of what the LEDs indicate.
NOTICE
If the RMP is already charging and the RMP is powered on, the RMP will error
and turn itself off. This is to prevent users from turning on the RMP and
driving it away while it is still plugged in. This functionality can be changed
by disabling the AC Present CSI in the Input Config Bitmap (see "RMP_CMD_
SET_INPUT_CONFIG_BITMAP," p. 55).
Copyright © 2014 Segway Inc. All rights reserved.
Table 7: Battery LEDs
LED Status Meaning
Off Battery is not charging.
Green Battery is charging.
Green Blinking Battery in balance mode. The time
between blinks gets longer as the
cells come into balance.
Red Fault or battery not present.
Red Blinking Charging fault. See "Charging
Faults," p. 109.
39
Page 40

RMP 210/220
Powering On/Off
This section describes how to turn the RMP on and off.
Powering On
The RMP can be turned on and off using the toggle switch mounted on the interface panel. Plugging in the USB connector will also power
on the RMP.
When successfully powered on, the RMP enters Standby mode, which is indicated by a blinking yellow LED and a solid green LED.
1. Make sure the disable button is connected and has not been pressed.
2. Flip the toggle switch to ON or connect via USB.
3. Wait for the RMP to enter Standby mode.
NOTICE
• Auxiliary power will not be available unless the toggle switch is ON.
• If the red LED blinks rapidly and then turns off, double-check the disable button (see "Troubleshooting," p. 114). If powered from
USB, try disconnecting USB cable and toggling on/off switch ON.
Table 8 shows the various operational modes and LED indicator patterns.
Table 8: Indicator LEDs
Mode Power LED Status LED
System Initialization Yellow Blinking Off
Standby Mode Yellow Blinking Green Solid
Tractor Mode Yellow Blinking Green Blinking
Balance Mode Yellow Blinking Green Blinking, Rapid
Bootloader Mode Yellow/Red Toggling Off
Diagnostic Mode Red Blinking, Sync'd Green Blinking, Sync'd
Reset Processors Red Blinking Rapid Off
Disable Power Red Solid Off
Powering Off
There are a few ways that the RMP can be powered off. Each is described in Table 9 below.
WARNING!
When the RMP powers off it may continue to move (for example, it could roll downhill). This could cause personal injury and/or property
damage.
Table 9: Power Down Methods
Method Resulting Behavior
User commanded Power Down The RMP powers down normally, performing housekeeping tasks. No fault is logged.
User commanded Disable The RMP logs the disable request as a fault and powers down.
User commanded Decel To Zero (DTZ) The RMP comes to a stop, logs the DTZ request as a fault, and powers down.
On/Off switch is set to off Power is immediately removed from the system. No housekeeping tasks are performed.
The RMP immediately shuts down.
Disable button is pressed The RMP logs the disable button press as a fault and powers down.
Hardware DTZ input The RMP comes to a stop, logs the DTZ Input as a fault, and powers down.
NOTICE
A fault response may also result in the machine powering off.
Copyright © 2014 Segway Inc. All rights reserved.
40
Page 41

RMP 210/220
Connecting
This chapter describes how to connect to the RMP. Included are the pinouts for all the panel connectors as well as detailed descriptions of
the Starter Breakout Harness and the Disable Button.
Connector I
Connector I is the largest external connector on the RMP. This approximately
2-inch diameter connector is a MIL-DTL-38999/24FJ4SN connector with 56
pins. It houses all the communication interfaces to the platform and provides
power available for customer loads.
Communication interfaces passing through this connector are Ethernet, USB,
and CAN. Power available is dependent upon which Power Converters have
been selected. Power is only available when the auxiliary battery option is
included.
This is a MIL-DTL-38999/24FJ4SN socket. Mating connector is a
MIL-DTL-38999/26FJ4PN plug.
Figure 49: 56-Pin Connector
Table 10: Connector I Pinout
Pin Signal
A ETHERNET TX+
b ETHERNET TX–
B ETHERNET RX+
c ETHERNET RX–
C USB_VBUS
D USB_D+
d USB_D–
E USB_ID
e USB_GND
F SERIAL_TX
f SERIAL_RX
1
1
G CAN1H
g CAN1L
H CAN1_GND
k RADIO1
L RADIO2
1
Not fully supported at time of printing.
Pin Signal
m RADIO3
M RADIO4
N RADIO5
n RADIO6
P RADIO_GND
K RADIO+5V
J LCD_POWER+5V
h SERIAL_GND
y POWER_1+
z POWER_1–
AA POWER_2+
JJ POWER_2+
DD POWER_2–
LL POWER_2–
FF POWER_3+
EE POWER_3–
Copyright © 2014 Segway Inc. All rights reserved.
41
Page 42

RMP 210/220
Starter Breakout Harness
The RMP is supplied with a breakout harness that connects to the 56-pin connector. This harness screws onto Connector I and
provides all the connections necessary to communicate with the RMP. It provides Ethernet, USB Type A, and CAN plugs as well as
leads for power. The connector is fully mated when the red stripe on Connector I is no longer visible.
Figure 50: Starter Breakout Harness
Ethernet
Figure 51: Starter Breakout Harness Pins
10 Mbps Ethernet is available on the 56-pin connector (see pinout, Table 11). The starter breakout harness includes a male RJ45
Ethernet plug.
Table 11: Ethernet Pinout
RJ45 Pin Signal Connector I Pin
1 Ethernet TX+ A
2 Ethernet TX– b
3 Ethernet RX+ B
6 Ethernet RX– c
Figure 52: RJ45 Plug
USB
USB 2.0 compliant interface is available on the 56-pin connector (see pinout, Table 12). The starter breakout harness includes a male
USB Type A plug.
Table 12: USB Pinout
USB Pin Signal Connector I Pin
1 USB_VBUS C
3 USB_D+ D
2 USB_D– d
4 USB_GND e
Figure 53: USB Plug
Housing Chassis Ground Housing
CAN
Controller Area Network connection is available on the 56-pin connector (see pinout, Table 13). The starter breakout harness includes
a male DB9 connector for CAN communication.
Table 13: CAN Pinout
DB9 Pin Signal Connector I Pin
7 CAN1H G
2 CAN1L g
3 CAN1_GND H
Figure 54: Male DB9 Connector
Copyright © 2014 Segway Inc. All rights reserved.
42
Page 43

RMP 210/220
Power
The auxiliary battery feeds Power Converters (number of converters varies from depending on RMP model). At time of purchase, the
customer has the option to select the output voltage of the Power Converters. Possible options are: 5 VDC, 12 VDC, 24 VDC, 36 VDC,
and 48 VDC. One of the options selected must be 12 VDC, in order to power the CCU.
Specifics about the regulation, available current, and available power can be found by reviewing the datasheet for the 72 V micro
family DC/DC regulators from Vicor (http://cdn.vicorpower.com/documents/datasheets/ds_72vin-micro-family.pdf).
Available DC voltages:
• 5 V
• 12 V
• 24 V
• 36 V
• 48 V
There are multiple slots for Power Converters. One slot must be 12 VDC;
all others may be chosen from the above options at time of purchase.
Table 14: Power Pinout (16 AWG Contacts)
Wire Color Voltage Connector I Pin
Red Power1+ y
Green Power1– (Return) z
Purple
Yellow
Blue Power3+ FF
Black Power3– (Return) EE
Power2+ AA
Power2+ JJ
Power2– (Return) DD
Power2– (Return) LL
Connector II
This panel connector provides pins for the disable button, the DTZ (Decelerate To Zero) signal, and for entering Bootloader mode and
Diagnostic mode. During normal operation, the #DISABLE_5V signal must be pulled up to +5 V, which is what the provided Disable Button
achieves. Otherwise the RMP will fail the startup check and fault. For more information on these signals see "Operational Model," p. 35,
and "Hardware Controls," p. 97.
This is a MIL-DTL-38999/24FB98SN socket. Mating connector is a
MIL-DTL-38999/24FB98PN plug.
Figure 55: 6-Pin Connector
Table 15: Connector II Pinout
Signal Pin
+5 V A
DECEL_REQUEST B
#DISABLE_5V C
DGND D
BOOT1 E
BOOT2 F
Chassis Ground Housing
Disable Button
The Disable Button is a normally-closed pushbutton that attaches to
Connector II. When the RMP boots up, it checks if the #DISABLE_5V signal has
been pulled up to +5 V. The Disable Button achieves this by connecting pins A
and C. If the #DISABLE_5V signal is not pulled up to 5 V(e.g. the Disable Button
is absent or has been pressed), the RMP immediately powers down.
Additional Signals
The connector can also be used with a custom harness to send Decel requests
as well as Boot1 and Boot2 signals. Boot1 is used for entering diagnostic
mode. Boot2 is used for entering bootloader mode. For more information see
"Operational Model," p. 35, and "Hardware Controls," p. 97.
Boot1 also doubles as a Balance Mode toggle on balancing platforms.
Copyright © 2014 Segway Inc. All rights reserved.
Figure 56: Disable Button
43
Page 44

RMP 210/220
Connector IV
This connector is used in conjunction with the External Power Supply. Charging is accomplished by connecting the External Power
Supply to the RMP and then plugging the External Power Supply into a standard AC outlet. The pinout for this connector is provided for
completeness.
For more information on charging see "Using the External Power Supply," p. 39.
This is a MIL-DTL-38999/24FD19PA plug. Mating connector is a MIL-DTL-38999/26FD19SA socket.
Table 16: Connector IV Pinout
Signal Pin
DC+1 B
GND1 P
DC+2 M
GND2 N
DC+3 J
Figure 57: 19-Pin Connector
GND3 U
DC+4 G
GND4 T
DC+5 E
GND5 R
Not Connected A, C, D, F, H, K, L, S, V
Copyright © 2014 Segway Inc. All rights reserved.
44
Page 45

Connecting To the RMP
There are three interfaces for connecting to the RMP broken out on the
Starter Breakout Harness:
• Ethernet
• CAN
• USB
All three methods provide the same functionality in regards to controlling the
RMP and receiving feedback messages from the RMP.
RMP 210/220
NOTICE
Actual connection procedures may vary depending on which operating
system is used. If you have any installation issues, please contact RMP
support (see "Reporting Problems to Segway," p. 114).
Ethernet
The RMP has a 10 Mbps Ethernet connection. It uses a static Ethernet
address that can be changed by modifying user-configurable parameters
(see "Configuration Commands," p. 51).
When connecting to a router, configure the RMP like any other device
with a static IP address.
When connecting directly to a computer:
• Computer IP address and RMP base address must match, but
computer and RMP must have unique addresses.
• Computer subnet and RMP subnet must match.
• Computer gateway and RMP gateway must match.
See Table 18 for recommended computer settings.
The RMP uses UDP port 8080 to communicate over the Ethernet
connection. The port number is user-configurable (see "RMP_CMD_SET_
ETH_PORT_NUMBER," p. 56). The RMP sends and receives data on
that port, so a connected computer must send and receive data on the
same port as the RMP.
The RMP will only connect to one host computer at a time. A 30-second
communication timeout is required when changing hosts.
The RMP will respond to ICMP ping requests.
Figure 58: Starter Breakout Harness
Table 17: Default RMP Ethernet Settings
Parameter Default Value
IP Address 192.168.0.40
Port 8080
Subnet Mask 255.255.255.0
Gateway 192.168.0.1
Table 18: Recommended Computer Settings
Parameter Default Value
IP Address 192.168.0.100
Subnet Mask 255.255.255.0
Gateway 192.168.0.1
Copyright © 2014 Segway Inc. All rights reserved.
45
Page 46

CAN
The RMP can communicate with any CAN-enabled device.
However, the included demo applications require a Kvaser USB-to-CAN
adapter to be used. Other brands of USB-to-CAN adapters will not work
with the demo applications.
To install a Kvaser adapter:
1. Download the Kvaser drivers from http://www.kvaser.com/en/
downloads.html. As of the current printing the drivers for all of
Kvaser's products are available in a single install file.
2. Install the Kvaser drivers. For details on how to install the
drivers, see the Kvaser installation guide for your product.
3. Plug in your Kvaser device. The USB connector plugs into a USB
port on your computer. The DB9 connector attaches to one of
the leads on the RMP.
4. The "Found New Hardware Wizard" will appear.
5. Choose "Install software automatically" and click "Next."
6. Click "Finish" to close the wizard. The Kvaser USB-to-CAN
connector is now installed.
RMP 210/220
Figure 59: Kvaser USB-to-CAN Adapter
NOTICE
Kvaser installs a new icon in the Control Panel.
Figure 60: Select the USB_Drivers Folder
USB
USB drivers are included with the RMP software (see "Included
Software," p. 100). These are custom Segway drivers and will not install
automatically. When the "Found New Hardware Wizard" appears, the
folder containing the drivers must be explicitly selected.
1. Connect a USB cable from the RMP to your computer.
2. The "Found New Hardware Wizard" will appear.
3. Select "Install from a list or specific location" and click "Next".
4. Point the installer to the USB Drivers folder (default location is
C:\Program Files\Segway\RMP_Applications\USB_Drivers).
5. The install process will begin.
6. When the Windows Logo warning pops up, click "Continue
Anyway".
7. Click "Finish" to close the wizard.
NOTICE
Generally the RMP uses a USB driver that allows it to operate as a CDC
device with an RS232 emulator. However, in Bootloader mode the RMP
uses a USB HID device driver.
Copyright © 2014 Segway Inc. All rights reserved.
46
Page 47

RMP 210/220
Communication
The RMP communicates over three interfaces: Controller Area Network (CAN), Universal Serial Bus (USB), and Ethernet User Datagram
Protocol (UDP). The messaging structure is similar across all three interfaces, with the only difference being the addition of a CRC-16 for
the USB and UDP interfaces. For the C/C++ implementation of the CRC algorithm, see "Cyclic Redundancy Check (CRC)-16," p. 78.
The RMP communicates using a polling method. It requires the host to send a command packet to which the RMP will respond with a data
packet containing all the present system information defined by the user.
The update frequency must fall within the range of 0.5Hz - 100Hz. If the commands are updated slower than the minimum rate, the
commands will timeout and the user will experience intermittent motion. If commands are issued faster than the maximum rate, the
commands will be ignored as if the host is not present.
For USB and UDP: if the command packet CRC is not valid, the RMP will ignore the command. See "Cyclic Redundancy Check (CRC)-16,"
p. 78, for details on how to calculate a command packet CRC.
The response packet is formed using the User Defined Feedback Bitmaps. It is important that the user understand how this works before
trying to interpret the feedback packets. Please see "RMP Response," p. 66, for details.
Much of the information contained in this section is also available in system_defines.py as part of the RMP Demo OCU source code.
WARNING!
The user has the ability to change configuration variables and machine limits in a range from zero to maximum. Care must be taken when
setting these limits as they could result in damage or injury. For example if the deceleration rate is set to 0 the RMP will not stop. This is to
allow for maximum flexibility but also requires that users be especially careful when setting the parameters.
The following shorthand will be used to represent the different types of numbers used when communicating with the RMP:
Table 19: Number Types
Shorthand Denition
Float32 32-bit floating point number represented as a IEE754 32-bit integer
1
S16_T 16-bit signed integer
U16_T 16-bit unsigned integer
U32_T 32-bit unsigned integer
1
See "IEEE754 32-bit Floating Point and Integer Representation," p. 77.
Copyright © 2014 Segway Inc. All rights reserved.
47
Page 48

RMP 210/220
General Command Structure
This section describes how commands are structured. CAN is described alone; USB and UDP are described together.
Each time a valid command is received, the RMP will send a response packet. See "RMP Response," p. 66, for details about the
response packet.
The RMP only accepts one command per frame.
There are two types of commands: motion commands and configuration commands. Motion commands are used to send normalized
velocity and yaw rate commands to the platform. Configuration commands are used to send non-motion machine parameters — such as
changing modes and setting parameters.
CAN
The CAN interface is structured as in Table 20.
Each CAN command always contains a Message ID, a data length code, and two
32-bit values.
Message ID = 11-bit CAN identifier
Data Length = 8
Value 1 = Data[0] – Data[3]
Value 2 = Data[4] – Data[7]
Value 1 and Value 2 are assembled as such:
Value1 = U32_T ((byte0 << 24) & 0xFF000000) |
((byte1 << 16) & 0x00FF0000) |
((byte2 << 8) & 0x0000FF00) |
(byte3 & 0x000000FF);
Value2 = U32_T ((byte4 << 24) & 0xFF000000) |
((byte5 << 16) & 0x00FF0000) |
((byte6 << 8) & 0x0000FF00) |
(byte7 & 0x000000FF);
Table 20: CAN Message Structure
Item Description
Baud Rate 1 Mbps
Message ID Standard 11-bit CAN identifier
Data Length Always 8
Data Bytes Bytes 0-3: Value 1
Bytes 4-7: Value 2
Copyright © 2014 Segway Inc. All rights reserved.
48
Page 49

RMP 210/220
General Command Structure (cont.)
USB and UDP
The USB interface acts as a standard Serial RS232 emulator. The Ethernet interface uses User Datagram Protocol (UDP). The
structure for messaging over both interfaces is the same.
Each command packet always contains a Message ID, two 32-bit values, and a CRC-16.
Message ID = Data[0] – Data[1]
Value 1 = Data[2] – Data[5]
Value 2 = Data[6] – Data[9]
CRC-16 = Data[10] – Data[11]
The packet is assembled as such:
Message ID = U16_T ((byte0 << 8) & 0xFF00) |
(byte1 & 0x00FF);
Value1 = U32_T ((byte2 << 24) & 0xFF000000) |
((byte3 << 16) & 0x00FF0000) |
((byte4 << 8) & 0x0000FF00) |
(byte5 & 0x000000FF);
Value2 = U32_T ((byte6 << 24) & 0xFF000000) |
((byte7 << 16) & 0x00FF0000) |
((byte8 << 8) & 0x0000FF00) |
(byte9 & 0x000000FF);
CRC-16 = U16_T ((byte10 << 8) & 0xFF00) |
(byte11 & 0x00FF);
Table 21: USB and UDP Message Structure
Item Description
Data Length Always 12
Message ID Bytes 0-1
Data Bytes Bytes 2-5: Value 1
Bytes 6-9: Value 2
CRC-16 Bytes 10-11: 16-bit CRC
Message ID
The Message ID is used to distinguish between the various types of messages sent to/from the RMP. Message types include
Standard Motion Commands (page 50), Configuration Commands (page 51), and UDFB Response messages (page 66). The
following table provides a list of possible Message IDs.
Table 22: Message IDs
Message ID Description
0x0500 Standard Motion Command
0x0600 Omni Motion Command
0x0501 Configuration Command
0x0502
0x0503
0x0504
0x0505
...
1
CAN response only.
1
1
1
1
1
RMP Response 1
RMP Response 2
RMP Response 3
RMP Response 4
RMP Response ...
Copyright © 2014 Segway Inc. All rights reserved.
49
Page 50

RMP 210/220
Standard Motion Commands
Standard motion commands control models with tires (not Mecanum
wheels). A standard RMP cannot use Mecanum wheels.
The motion command packet is used to command machine velocity and yaw
rate. The commands are normalized (-1.0–1.0). The command variable format
is Float32. The normalized values are scaled against the user configurable
parameters associated with the controller. The parameter against which the
command is scaled depends on the input mapping type. For details on input
mapping see "Standard Input Mapping," p. 62.
The basic motion command structure is shown in Table 23. Both variables are formatted as Float32 with a range of -1.0–1.0. For
details on converting floating point values to integer representation in IEEE754 format, see "IEEE754 32-bit Floating Point and Integer
Representation," p. 77.
CAN
Motion commands sent on the CAN interface follow the structure listed in Table 24.
Example:
vel_cmd = 0.75 (0x3F400000 IEEE754 integer representation)
yaw_cmd = 0.25 (0x3E800000 IEEE754 integer representation)
Table 23: Standard Motion Command Structure
Item Description
Message ID 0x0500
Variable 1 Normalized Velocity
Variable 2 Normalized Yaw Rate
Example packet:
Message ID = 0x0500
Data Length = 8
Data[0] = 0x3F
Data[1] = 0x40
Data[2] = 0x00
Data[3] = 0x00
Data[4] = 0x3E
Data[5] = 0x80
Data[6] = 0x00
Data[7] = 0x00
Table 24: CAN Standard Motion Commands
USB and UDP
The USB and UDP interfaces mimic the CAN interface with the addition of a
CRC-16. The packet is sent in a byte array. See the command structure shown in
Table 25.
Example:
vel_cmd = 0.75 (0x3F400000 IEEE754 integer representation)
yaw_cmd = 0.25 (0x3E800000 IEEE754 integer representation)
Example packet:
Data[0] = 0x05
Data[1] = 0x00
Data[2] = 0x3F
Data[3] = 0x40
Data[4] = 0x00
Data[5] = 0x00
Data[6] = 0x3E
Data[7] = 0x80
Data[8] = 0x00
Data[9] = 0x00
Data[10] = 0x80
Data[11] = 0x1E
Table 25: USB and UDP Standard Motion Commands
Item Description
Baud Rate 1 Mbps
Message ID 0x0500
Data Length 8
Data[0] — Data[3] Normalized Velocity
Data[4] — Data[7] Normalized Yaw Rate
Item Description
Packet Length 12 bytes
Data[0] — Data[1] 0x0500 (Message ID)
Data[2] — Data[5] Normalized Velocity
Data[6] — Data[9] Normalized Yaw Rate
Data[10] — Data[11] CRC-16
Copyright © 2014 Segway Inc. All rights reserved.
50
Page 51

RMP 210/220
Configuration Commands
The configuration command is used to perform a variety of functions, including: requesting mode transitions, retrieving the fault log,
resetting position data, setting stored configurable parameters in non-volatile memory, and requesting audio tones.
Configuration parameters — which are set using configuration commands — are stored in Non-Volatile Memory (NVM). These values are
pulled from memory at startup and used to initialize various parameters in the system. Once a value is set in NVM the value does not need
to be set again unless it needs to be changed.
Configuration commands are composed of two variables:
• Value 1 (command ID) is formatted as U32_T.
• Value 2 (parameter) is 32 bits long; its format depends on the
command being issued.
The command ID is always a 32-bit unsigned integer (U32_T).
CAN
Configuration commands sent on the CAN interface follow the structure listed
in Table 27.
Example:
gp_cmd = RMP_CMD_SET_OPERATIONAL_MODE (0x00000020)
gp_param = TRACTOR_REQUEST (format: integer, 0x00000005)
Table 26: Conguration Command Structure
Item Description
Message ID 0x0501
Value 1 Command ID.
Value 2 Parameter.
Table 27: CAN Conguration Commands
Example packet:
Message ID = 0x0501
Data Length = 8
Data[0] = 0x00
Data[1] = 0x00
Data[2] = 0x00
Data[3] = 0x20
Data[4] = 0x00
Data[5] = 0x00
Data[6] = 0x00
Data[7] = 0x05
USB and UDP
The USB and UDP interfaces mimic the CAN interface with the addition of
a CRC-16. The packet is sent in a byte array. See the command structure
shown in Table 28.
Example:
gp_cmd = RMP_CMD_SET_OPERATIONAL_MODE (0x00000020)
gp_param = TRACTOR_REQUEST (format: integer, 0x00000005)
Example packet:
Data[0] = 0x05
Data[1] = 0x01
Data[2] = 0x00
Data[3] = 0x00
Data[4] = 0x00
Data[5] = 0x20
Data[6] = 0x00
Data[7] = 0x00
Data[8] = 0x00
Data[9] = 0x05
Data[10] = 0xD4
Data[11] = 0x51
Item Description
Baud Rate 1 Mbps
Message ID 0x0501
Data Length 8
Data[0] — Data[3] Command ID
Data[4] — Data[7] Parameter
Table 28: USB and UDP Conguration Commands
Item Description
Packet Length 12 bytes
Data[0] — Data[1] 0x0501 (Message ID)
Data[2] — Data[5] Command ID
Data[6] — Data[9] Parameter
Data[10] — Data[11] CRC-16
Copyright © 2014 Segway Inc. All rights reserved.
51
Page 52

RMP 210/220
Conguration Commands (cont.)
RMP_CMD_NONE
This command is used to poll the RMP for data without issuing a command that will result in an action. This command does nothing, but
is valid and will solicit a response.
Command ID: 0
Parameter Type: U32_T
Parameter Range: 0 (value ignored)
Parameter Units: Unitless
Stored in NVM: No
Default Value: N/A
RMP_CMD_SET_MAXIMUM_VELOCITY
This command is used to set the user defined maximum velocity limit. See "Standard Input Mapping," p. 62, for how this value will
affect velocity commands.
Command ID: 1
Parameter Type: Float32
Parameter Range: 0.0–8.047
Parameter Units: m/s
Stored in NVM: Yes
Default Value: 2.2357
RMP_CMD_SET_MAXIMUM_ACCELERATION
This command is used to set the user defined maximum acceleration limit. See "Standard Input Mapping," p. 62, for how this value will
affect velocity commands.
Command ID: 2
Parameter Type: Float32
Parameter Range: 0.0–7.848
Parameter Units: m/s
2
Stored in NVM: Yes
Default Value: 3.923
RMP_CMD_SET_MAXIMUM_DECELERATION
WARNING!
Setting the maximum deceleration limit to zero will result in the machine not being able to stop. This could cause death, serious injury, or
property damage.
This command is used to set the user defined maximum deceleration limit. See "Standard Input Mapping," p. 62, for how this value will
affect velocity commands.
Command ID: 3
Parameter Type: Float32
Parameter Range: 0.0–7.848
Parameter Units: m/s
Stored in NVM: Yes
Default Value: 3.923
2
Copyright © 2014 Segway Inc. All rights reserved.
52
Page 53

RMP 210/220
Conguration Commands (cont.)
RMP_CMD_SET_MAXIMUM_DTZ_DECEL_RATE
WARNING!
Setting the maximum Decel To Zero (DTZ) deceleration limit to zero will result in the machine not being able to stop during DTZ. This
could cause death, serious injury, or property damage.
This command is used to set the user defined maximum Decel To Zero (DTZ) deceleration rate. When a DTZ is commanded — either via a
mode command, through hardware, or as a fault response — this is the maximum rate at which the machine will come to a stop.
Command ID: 4
Parameter Type: Float32
Parameter Range: 0.0–7.848
Parameter Units: m/s
2
Stored in NVM: Yes
Default Value: 3.923
RMP_CMD_SET_COASTDOWN_ACCEL
WARNING!
Setting the coastdown acceleration to zero will result in the machine maintaining constant velocity even when no velocity is commanded
when using acceleraton-based input mapping. This could cause death, serious injury, or property damage.
This command is used to set the user defined coastdown acceleration value for acceleration-based input mapping. See "Standard Input
Mapping," p. 62, for how this value will affect velocity commands.
Command ID: 5
Parameter Type: Float32
Parameter Range: 0.0–1.961
Parameter Units: m/s
Stored in NVM: Yes
Default Value: 1.961
2
RMP_CMD_SET_MAXIMUM_TURN_RATE
WARNING!
Setting the maximum turn rate to zero will result in the RMP not being able to turn. This could cause death, serious injury, or property
damage.
This command is used to set the user defined yaw rate limit. See "Standard Input Mapping," p. 62, for how this value will affect yaw
rate commands.
Command ID: 6
Parameter Type: Float32
Parameter Range: 0.0–4.5
Parameter Units: rad/s
Stored in NVM: Yes
Default Value: 3.0
Copyright © 2014 Segway Inc. All rights reserved.
53
Page 54

RMP 210/220
Conguration Commands (cont.)
RMP_CMD_SET_MAXIMUM_TURN_ACCEL
WARNING!
Setting the maximum turn acceleration to zero will result in the RMP not being able to turn. This could cause death, serious injury, or
property damage.
This command is used to set the user defined yaw acceleration limit. This value limits the rate at which the yaw rate target can change.
Command ID: 7
Parameter Type: Float32
Parameter Range: 0.0–28.274
Parameter Units: rad/s
2
Stored in NVM: Yes
Default Value: 28.274
RMP_CMD_SET_TIRE_DIAMETER
WARNING!
This value must match the actual tire diameter on the RMP. Failure to do so will result in undetermined behavior and invalid feedback. This
could cause death, serious injury, or property damage.
This command updates the tire diameter used in software to calculate velocity, acceleration, position, and differential wheel speed (yaw
rate). The RMP must be power cycled (rebooted) for the change to take effect.
Command ID: 8
Parameter Type: Float32
Parameter Range: 0.3556–1.0
Parameter Units: m
Stored in NVM: Yes
Default Value: 0.483616
RMP_CMD_SET_WHEEL_BASE_LENGTH
WARNING!
This value must match the actual wheel base length on the RMP. Failure to do so will result in undetermined behavior and invalid
feedback. This could cause death, serious injury, or property damage.
This command updates the wheel base length (fore/aft distance between the tires) used in software to calculate lateral acceleration and
differential wheel speed (yaw rate). The RMP must be power cycled (rebooted) for the change to take effect.
Command ID: 9
Parameter Type: Float32
Parameter Range: 0.4142–1.0
Parameter Units: m
Stored in NVM: Yes
Default Value: 0.5842
Copyright © 2014 Segway Inc. All rights reserved.
54
Page 55

RMP 210/220
Conguration Commands (cont.)
RMP_CMD_SET_WHEEL_TRACK_WIDTH
WARNING!
This value must match the actual track width on the RMP. Failure to do so will result in undetermined behavior and invalid feedback. This
could cause death, serious injury, or property damage.
This command updates the track width (lateral distance between the tires) used in software to calculate lateral acceleration and
differential wheel speed (yaw rate). The RMP must be power cycled (rebooted) for the change to take effect.
Command ID: 10
Parameter Type: Float32
Parameter Range: 0.506476–1.0
Parameter Units: m
Stored in NVM: Yes
Default Value: 0.7112
RMP_CMD_SET_TRANSMISSION_RATIO
WARNING!
This value must match the actual gear ratio on the RMP. Failure to do so will result in undetermined behavior and invalid feedback. This
could cause death, serious injury, or property damage.
This command updates the gearbox (transmission) ratio. It is used in software to convert from motor speed to gearbox output speed. The
RMP must be power cycled (rebooted) for the change to take effect.
Command ID: 11
Parameter Type: Float32
Parameter Range: 1.0–200.0
Parameter Units: Unitless
Stored in NVM: Yes
Default Value: 24.2667
RMP_CMD_SET_INPUT_CONFIG_BITMAP
This command updates RMP behavior configurations. It updates the input mapping, audio silence settings, and whether to check and
warn for charger present at startup. When the audio silence bit is set the RMP will become silent and not issue any audio indications. For
an explanation of input mapping see "Standard Input Mapping," p. 62.
Command ID: 12
Parameter Type: U32_T
Parameter Range: 0x0000000F (valid mask)
Parameter Units: Unitless
Stored in NVM: Yes
Default Value: 0x00000001
YAW_ALAT_SCALE_MAPPING = 0;
YAW_ALAT_LIMIT_MAPPING = 1;
VELOCITY_BASED_MAPPING = 0;
ACCELERATION_BASED_MAPPING = 1;
ALLOW_MACHINE_AUDIO = 0;
SILENCE_MACHINE_AUDIO = 1;
ENABLE_AC_PRESENT_CSI = 0;
DISABLE_AC_PRESENT_CSI = 1;
BALANCE_MODE_DISABLED = 0;
BALANCE_MODE_ENABLE = 1;
Copyright © 2014 Segway Inc. All rights reserved.
55
Page 56

Conguration Commands (cont.)
BALANCE_GAINS_DEFAULT = (0x00000000)
BALANCE_GAINS_LIGHT = (0x00000001)
BALANCE_GAINS_TALL = (0x00000002)
BALANCE_GAINS_HEAVY = (0x00000004)
BALANCE_GAINS_CUSTOM = (0x00000008)
VALID_BALANCE_GAINS_MASK = (0x0000000F)
VEL_MAPPING_NO_FILTER = (0x00000000)
VEL_MAPPING_4HZ_FILTER = (0x00000001)
VEL_MAPPING_1HZ_FILTER = (0x00000002)
VEL_MAPPING_05HZ_FILTER = (0x00000004)
VEL_MAPPING_02HZ_FILTER = (0x00000008)
VALID_VEL_MAPPING_FILTER_MASK = (0x0000000F)
YAW_INPUT_MAPPING_SHIFT = 0;
VEL_INPUT_MAPPING_SHIFT = 1;
AUDIO_SILENCE_REQUEST_SHIFT = 2;
DISABLE_AC_PRESENT_CSI_SHIFT = 3;
BALANCE_GAIN_SCHEDULE_SHIFT = 4;
BALANCE_MODE_LOCKOUT_SHIFT = 8;
VEL_MAPPING_FILTER_SHIFT = 9;
DEFAULT_CONFIG_BITMAP = ((YAW_ALAT_LIMIT_MAPPING << YAW_INPUT_MAPPING_SHIFT) |
(VELOCITY_BASED_MAPPING << VEL_INPUT_MAPPING_SHIFT) |
(ALLOW_MACHINE_AUDIO << AUDIO_SILENCE_REQUEST_SHIFT) |
(ENABLE_AC_PRESENT_CSI << DISABLE_AC_PRESENT_CSI_SHIFT) |
(BALANCE_GAINS_DEFAULT << BALANCE_GAIN_SCHEDULE_SHIFT)|
(BALANCE_MODE_DISABLED << BALANCE_MODE_LOCKOUT_SHIFT) |
(VEL_MAPPING_NO_FILTER << VEL_MAPPING_FILTER_SHIFT));
RMP 210/220
RMP_CMD_SET_ETH_IP_ADDRESS
This command updates the Ethernet IP address on the RMP. The parameter must be converted from a dotted quad address to integer
representation. The RMP must be power cycled (rebooted) for the address change to take effect.
Command ID: 13
Parameter Type: U32_T
Parameter Range: Valid IP Address
Parameter Units: Unitless
Stored in NVM: Yes
Default Value: 0x2800A8C0 (192.168.0.40)
integer = (first octet × 16777216) + (second octet × 65536) + (third octet × 256) + (fourth octet)
For the IP address 192.168.0.40:
integer = (40 × 16777216) + (0 × 65536) + (168 × 256) + (192) = 0x2800A8C0
RMP_CMD_SET_ETH_PORT_NUMBER
This command updates the Ethernet IP port number for the PC-to-RMP connection. Both the host computer and the RMP must
communicate over this port. The RMP must be power cycled (rebooted) for the change to take effect.
Command ID: 14
Parameter Type: U32_T
Parameter Range: Valid Ethernet Port Number
Parameter Units: Unitless
Stored in NVM: Yes
Default Value: 8080
Copyright © 2014 Segway Inc. All rights reserved.
56
Page 57

RMP 210/220
Conguration Commands (cont.)
RMP_CMD_SET_ETH_SUBNET_MASK
This command updates the Ethernet IP subnet mask of the RMP. The parameter must be converted from a dotted quad address to integer
representation. The RMP must be power cycled (rebooted) for the change to take effect.
Command ID: 15
Parameter Type: U32_T
Parameter Range: Valid IP Subnet Mask
Parameter Units: Unitless
Stored in NVM: Yes
Default Value: 0x00FFFFFF (255.255.255.0)
integer = (first octet × 16777216) + (second octet × 65536) + (third octet × 256) + (fourth octet)
For the IP subnet mask 255.255.255.0:
integer = (0 × 16777216) + (255 × 65536) + (255 × 256) + (255) = 0x00FFFFFF
RMP_CMD_SET_ETH_GATEWAY
This command updates the Ethernet IP gateway address of the RMP. The parameter must be converted from a dotted quad address to
integer representation. The RMP must be power cycled (rebooted) for the change to take effect.
Command ID: 16
Parameter Type: U32_T
Parameter Range: Valid IP Gateway Address
Parameter Units: Unitless
Stored in NVM: Yes
Default Value: 0x0100A8C0 (192.168.0.1)
integer = (first octet × 16777216) + (second octet × 65536) + (third octet × 256) + (fourth octet)
For the IP gateway address 192.168.0.1:
integer = (1 × 16777216) + (0 × 65536) + (168 × 256) + (192) = 0x0100A8C0
RMP_CMD_SET_USER_FB_1_BITMAP
This command updates the User Defined Feedback Bitmap 1. It is used to select feedback from the list of variables defined in "User
Defined Feedback Bitmap 1," p. 70. See "User Defined Feedback Bitmaps," p. 66, for details on how these bitmaps work.
Command ID: 17
Parameter Type: U32_T
Parameter Range: 0xFFFFFFFF (valid mask)
Parameter Units: Unitless
Stored in NVM: Yes
Default Value: 0xFFFFFFFF
RMP_CMD_SET_USER_FB_2_BITMAP
This command updates the User Defined Feedback Bitmap 2. It is used to select feedback from the list of variables defined in "User
Defined Feedback Bitmap 2," p. 72. See "User Defined Feedback Bitmaps," p. 66, for details on how these bitmaps work.
Command ID: 18
Parameter Type: U32_T
Parameter Range: 0xFFFFFFFF (valid mask)
Parameter Units: Unitless
Stored in NVM: Yes
Default Value: 0xFFFFFFFF
Copyright © 2014 Segway Inc. All rights reserved.
57
Page 58

RMP 210/220
Conguration Commands (cont.)
RMP_CMD_SET_USER_FB_3_BITMAP
This command updates the User Defined Feedback Bitmap 3. It is used to select feedback from the list of variables defined in "User
Defined Feedback Bitmap 3," p. 74. See "User Defined Feedback Bitmaps," p. 66, for details on how these bitmaps work.
Command ID: 19
Parameter Type: U32_T
Parameter Range: 0x0FFFFFFF (valid mask)
Parameter Units: Unitless
Stored in NVM: Yes
Default Value: 0x0FFFFFFF
RMP_CMD_SET_USER_FB_4_BITMAP
This command updates the User Defined Feedback Bitmap 4. It is used to select feedback from the list of variables defined in "User
Defined Feedback Bitmap 4," p. 76. See "User Defined Feedback Bitmaps," p. 66, for details on how these bitmaps work.
Command ID: 20
Parameter Type: U32_T
Parameter Range: 0x00000000 (valid mask)
Parameter Units: Unitless
Stored in NVM: Yes
Default Value: 0x00000000
RMP_CMD_FORCE_CONFIG_FEEDBACK_BITMAPS
This command forces the feedback to contain all the configurable parameters stored in NVM. It is used when verifying that parameters
have been successfully set and for general verification at startup. Set this parameter to 1 to force all feedback to contain configurable
items; set it to 0 to stop forcing the feedback.
Command ID: 30
Parameter Type: U32_T
Parameter Range: 0 or 1
Parameter Units: Boolean
Stored in NVM: No
Default Value: N/A
When this command is set to 1, the response will contain the following:
feedback1 = 0x00000000
feedback2 = 0x00000000
feedback3 = 0xFFFFF000
feedback4 = 0x00000000
Responses thereafter will contain this data until the parameter is set to 0, at which point the feedback reverts to the user-defined
feedback. See "User Defined Feedback Bitmaps," p. 66, for details.
Copyright © 2014 Segway Inc. All rights reserved.
58
Page 59

RMP 210/220
Conguration Commands (cont.)
RMP_CMD_SET_AUDIO_COMMAND
This command requests an audio song from the RMP motor unit. If the RMP determines that it is able to play the song it will do so. If it is
internally using the audio or the current limit is folded back, the RMP will not play the commanded audio.
Audio song requests should be momentary (i.e. they only need to be sent once). The songs that are not persistent will be cleared by the
CCU. If the song is persistent it must be cleared by sending the MOTOR_AUDIO_PLAY_NO_SONG parameter. See Table 29 for a list of
available audio songs.
Command ID: 31
Parameter Type: U32_T
Parameter Range: 0–16
Parameter Units: Unitless
Stored in NVM: No
Default Value: N/A
Table 29: Audio Songs
Audio Song Value Must Be Cleared?
MOTOR_AUDIO_PLAY_NO_SONG 0 No
MOTOR_AUDIO_PLAY_POWER_ON_SONG 1 No
MOTOR_AUDIO_PLAY_POWER_OFF_SONG 2 No
MOTOR_AUDIO_PLAY_ALARM_SONG 3 No
MOTOR_AUDIO_PLAY_MODE_UP_SONG 4 No
MOTOR_AUDIO_PLAY_MODE_DOWN_SONG 5 No
MOTOR_AUDIO_PLAY_ENTER_ALARM_SONG 6 No
MOTOR_AUDIO_PLAY_EXIT_ALARM_SONG 7 No
MOTOR_AUDIO_PLAY_FINAL_SHUTDOWN_SONG 8 No
MOTOR_AUDIO_PLAY_CORRECT_ISSUE 9 No
MOTOR_AUDIO_PLAY_ISSUE_CORRECTED 10 No
MOTOR_AUDIO_PLAY_CORRECT_ISSUE_REPEATING 11 Yes
MOTOR_AUDIO_PLAY_BEGINNER_ACK 12 No
MOTOR_AUDIO_PLAY_EXPERT_ACK 13 No
MOTOR_AUDIO_ENTER_FOLLOW 14 No
MOTOR_AUDIO_TEST_SWEEP 15 No
MOTOR_AUDIO_SIMULATE_MOTOR_NOISE 16 Yes
RMP_CMD_SET_OPERATIONAL_MODE
This command is used to request mode transitions for the
RMP. The modes are listed in Table 30. The persistence
of the request is managed internally by the CCU (i.e., the
command need only be sent once). For more information
on modes, see "Operational Model," p. 35.
Command ID: 32
Parameter Type: U32_T
Parameter Range: 1–5
Parameter Units: Unitless
Stored in NVM: No
Default Value: N/A
Copyright © 2014 Segway Inc. All rights reserved.
Table 30: Operational Mode Requests
Mode Request Parameter Value Valid From
DISABLE_REQUEST 1 Any State
POWERDOWN_REQUEST 2 Any State
DTZ_REQUEST 3 Any State
STANDBY_REQUEST 4
TRACTOR_REQUEST 5
BALANCE_REQUEST 6
Tractor Mode
Balance Mode
Standby Mode
Balance Mode
Standby Mode
Tractor Mode
59
Page 60

RMP 210/220
Conguration Commands (cont.)
RMP_CMD_SEND_SP_FAULTLOG
This command is used to request the faultlog from the RMP. Setting the parameter to 1 indicates a new request; 0 indicates a subsequent
request. The entire faultlog requires six packets: the first request should have the parameter set to 1; the next five requests should have
the parameter set to 0.
See faultlog_extractor.py in the RMP Demo OCU source code for details on extracting and parsing the faultlog.
Command ID: 33
Parameter Type: U32_T
Parameter Range: 0 or 1
Parameter Units: Boolean
Stored in NVM: No
Default Value: N/A
RMP_CMD_RESET_INTEGRATORS
This command is used to reset the position data on the RMP. The parameter
is a bitmap of which integrators to reset. See Table 31 for details about the
bitmap.
Command ID: 34
Parameter Type: U32_T
Parameter Range: 0x0000001F (valid mask)
Parameter Units: Unitless
Stored in NVM: No
Default Value: N/A
Table 31: Position Reset Bitmap
Data to Reset Value
RESET_LINEAR_POSITION 0x00000001
RESET_RIGHT_FRONT_POSITION 0x00000002
RESET_LEFT_FRONT_POSITION 0x00000004
RESET_RIGHT_REAR_POSITION 0x00000008
RESET_LEFT_REAR_POSITION 0x00000010
RESET_ALL_POSITION_DATA 0x0000001F
RMP_CMD_RESET_PARAMS_TO_DEFAULT
This command is used to reset all the parameters stored in NVM to their default values.
Command ID: 35
Parameter Type: U32_T
Parameter Range: 0 (value ignored)
Parameter Units: Unitless
Stored in NVM: No
Default Value: N/A
NOTE:
Some parameters (including Ethernet settings, tire diameter, wheel base, track width, and transmission ratio) will not take effect until
after the machine has been power cycled (rebooted).
Copyright © 2014 Segway Inc. All rights reserved.
60
Page 61

Conguration Commands (cont.)
The table below provides a list of all the configuration commands and their parameters.
Table 32: Conguration Commands
RMP 210/220
Command Name ID Type Range Units
Stored in
NVM?
Default Value
RMP_CMD_NONE 0 U32_T 0 (value ignored) Unitless No N /A
RMP_CMD_SET_MAXIMUM_VELOCITY 1 Float32 0.0–8.047 m/s Ye s 2.2352
RMP_CMD_SET_MAXIMUM_ACCELERATION 2 Float32 0.0–7.848 m/s
RMP_CMD_SET_MAXIMUM_DECELERATION 3 Float32 0.0–7.848 m/s
RMP_CMD_SET_MAXIMUM_DTZ_DECEL_RATE 4 Float32 0.0–7.848 m/s
RMP_CMD_SET_COASTDOWN_ACCEL 5 Float32 0.0–1.961 m /s
2
2
2
2
Yes 3.923
Yes 3.923
Yes 3.923
Yes 1.961
RMP_CMD_SET_MAXIMUM_TURN_RATE 6 Float32 0.0–4.5 rad/s Yes 3.0
RMP_CMD_SET_MAXIMUM_TURN_ACCEL 7 Float32 0.0–28.274 rad/s
RMP_CMD_SET_TIRE_DIAMETER
1
8 Float32 0.3556–1.0 m Ye s 0.483616
2
Yes 28.274
RMP_CMD_SET_WHEEL_BASE_LENGTH 9 Float32 0.4142–1.0 m Ye s 0.5842
RMP_CMD_SET_WHEEL_TRACK_WIDTH
RMP_CMD_SET_TRANSMISSION_RATIO
RMP_CMD_SET_INPUT_CONFIG_BITMAP 12 U32_T
RMP_CMD_SET_ETH_IP_ADDRESS
RMP_CMD_SET_ETH_PORT_NUMBER
RMP_CMD_SET_ETH_SUBNET_MASK
RMP_CMD_SET_ETH_GATEWAY
†
RMP_CMD_SET_USER_FB_1_BITMAP 17 U32_T
RMP_CMD_SET_USER_FB_2_BITMAP 18 U32_T
RMP_CMD_SET_USER_FB_3_BITMAP 19 U32_T
RMP_CMD_SET_USER_FB_4_BITMAP 20 U32_T
RMP_CMD_FORCE_CONFIG_FEEDBACK_
BITMAPS
1
1
1
1
1
10 Float32 0.506476–1.0 m Ye s 0.7112
11 Float32 1.0–200.0 Unitless Ye s 24.2667
0x0000000F
(valid mask)
13 U32_T Valid IP Address Unitless Ye s
14 U32_T
15 U32_T
16 U32_T
Valid Ethernet
Port Number
Valid IP Subnet
Mask
Valid IP Gateway
Address
0xFFFFFFFF
(valid mask)
0xFFFFFFFF
(valid mask)
0x0FFFFFFF
(valid mask)
0x00000000
(valid mask)
Unitless Yes 0x1
0x2800A8C0
(192.168.0.40)
Unitless Yes 8080
Unitless Yes
Unitless Yes
0x00FFFFFF
(255.255.255.0)
0x0100A8C0
(192.168.0.1)
Unitless Yes 0xFFFFFFFF
Unitless Yes 0xFFFFFFFF
Unitless Yes 0x0FFFFFFF
Unitless Yes 0x00000000
30 U32_T 0 or 1 Boolean No N /A
RMP_CMD_SET_AUDIO_COMMAND 31 U32_T 0–16 Unitless No N /A
RMP_CMD_SET_OPERATIONAL_MODE 32 U32_T 1–5 Unitless No N/A
RMP_CMD_SEND_SP_FAULTLOG 33 U32_T 0 or 1 Boolean No N/A
RMP_CMD_RESET_INTEGRATORS 34 U32_T
0x0000001F
(valid mask)
Unitless No N/A
RMP_CMD_RESET_PARAMS_TO_DEFAULT 35 U32_T 0 (value ignored) Unitless No N /A
1
RMP must be power cycled for parameter to take effect.
Copyright © 2014 Segway Inc. All rights reserved.
61
Page 62

RMP 210/220
Standard Input Mapping
The RMP has two input mapping methods for the velocity controller and two for the yaw controller. The type of mapping used for each
controller can be set using the configuration command RMP_SET_INPUT_CONFIG_BITMAP (page 55).
The inputs to each controller are the normalized motion commands (see "Standard Motion Commands," p. 50). The commands are
scaled depending on the input mapping selected for the machine. Each type of input mapping is described in detail below.
Velocity Controller, Velocity-Based Input Mapping
This type of input mapping is particularly useful for autonomous operation where direct velocity is desired to be commanded.
This type of input mapping proportionally scales the normalized velocity controller command to the velocity limit. The target is then
rate limited by the acceleration and deceleration limits.
• As the velocity target moves away from zero, the maximum acceleration limit is applied.
• As the velocity target moves toward zero, the maximum deceleration limit is applied.
This means that — although the input can move stepwise — the target can only change at the rates specified in the NVM.
The following parameters affect velocity-based input mapping:
1. RMP_CMD_SET_MAXIMUM_VELOCITY — serves as the velocity limit.
2. RMP_CMD_SET_MAXIMUM_ACCELERATION — the value against which the normalized input command is scaled when the
velocity target is moving away from zero velocity.
3. RMP_CMD_SET_MAXIMUM_DECELERATION — the value against which the normalized input command is scaled when the
velocity target is moving toward zero velocity.
Velocity Controller, Acceleration-Based Input Mapping
This type of input mapping is primarily intended for teleoperation of the platform.
For this input mapping, the command is scaled by the user configurable acceleration or deceleration (depending on the sign of
the command) and a desired acceleration is generated. Because the velocity controller requires a velocity target, this desired
acceleration is integrated to produce the velocity target. Additionally, this "desired acceleration" command is attenuated as the
machine approaches some region of operation near the velocity limit. This provides feedback to the driver that they are approaching
the limit and helps to smooth the transition from accelerating to steady state at the speed limit.
Another characteristic is the coast-down behavior for zero input. Due to the nature of closed loop velocity control, a zero input
is interpreted as zero acceleration and thus constant speed. A simplified way to think of it is that you are always running "cruise
control." To get the desired behavior of a coast-down for zero input you add it in deliberately, summed into the "desired acceleration"
from the normalized input. The coast-down acceleration needs to be managed appropriately with speed so it is always applied in the
correct direction, opposing vehicle motion. One method of achieving this is to link the coast-down to system speed.
In acceleration-based input mapping it is also desirous to have some interlock between forward motion and reverse motion. This is
due to the common input for acceleration and deceleration. When braking from speed the vehicle should not start moving backwards
once it comes to zero speed. This can be accomplished through various means including a "gesture" of the input, analogous to a
double tap or double click. This method requires returning the input command to zero before allowing a change in fore/aft direction.
The following parameters affect this type of input mapping:
1. RMP_CMD_SET_MAXIMUM_VELOCITY — serves as the velocity limit.
2. RMP_CMD_SET_MAXIMUM_ACCELERTION — the value against which the normalized input command is scaled when the
velocity target is moving away from zero velocity.
3. RMP_CMD_SET_MAXIMUM_DECELERATION — the value against which the normalized input command is scaled when the
velocity target is moving toward zero velocity.
4. RMP_CMD_SET_COASTDOWN_ACCEL — the rate at which the velocity target goes to zero with zero input command.
Copyright © 2014 Segway Inc. All rights reserved.
62
Page 63

RMP 210/220
Standard Input Mapping (cont.)
Yaw Controller, Yaw Rate Limit-Based Input Mapping
This type of mapping is generally ideal for autonomous driving where the user wants — within limits — the same input sensitivity
through all velocities.
This type of input mapping scales the normalized input against the yaw rate limit set in NVM. It saturates the yaw command to an
envelope on the yaw-rate – linear-velocity plane. This envelope is derived from a maximum lateral acceleration limit of 1.0 g. In this
mapping calculation, yaw rate is mapped linearly to input command and saturated at the envelope.
The plot of the yaw-rate target versus vehicle velocity for this input mapping is shown below, where the yaw rate target is a function
of user command and vehicle velocity.
5
4.5
4
3.5
3
2.5
2
Yaw Rate Target (rad/s)
1.5
1
0.5
0
0 1 2 3 4 5 6 7 8
Figure 61: Yaw Rate Target vs. Vehicle Velocity: Limit-Based Mapping
Yaw Rate Limit-Based Input Mapping
Vehicle Velocity (m/s)
Norm Yaw Cmd = 0.2[ ]
Norm Yaw Cmd = 0.4[ ]
Norm Yaw Cmd = 0.6[ ]
Norm Yaw Cmd = 0.8[ ]
Norm Yaw Cmd = 1.0[ ]
There are two configurable parameters stored in NVM that affect this type of input mapping:
1. RMP_CMD_SET_MAXIMUM_TURN_RATE — the value against which the normalized input command is scaled to generate a
desired yaw rate.
2. RMP_CMD_SET_MAXIMUM_TURN_ACCEL — the rate of change limit for the yaw rate target.
Copyright © 2014 Segway Inc. All rights reserved.
63
Page 64

RMP 210/220
Standard Input Mapping (cont.)
Yaw Controller, Lateral Acceleration-Based Input Mapping
Lateral acceleration-based yaw controller input mapping is primarily intended for teleoperation of the platform.
This type of input mapping scales the normalized input against the lateral acceleration limit set in code (1.0 g). From the lateral
acceleration command and the present velocity, a yaw rate command is generated. This reduces the yaw rate sensitivity of the input
as the speed increases in order to keep the lateral acceleration sensitivity constant. It allows the user to utilize the full scale (-1.0
to 1.0) input command through the entire velocity range without saturating the yaw rate. This type of mapping is generally ideal
for manual driving (direct or teleoperated) where the user wants to reduce input sensitivity to yaw rates as the speed increases
(meaning for finer adjustments with larger input as speed increases). The plot of yaw rate target versus vehicle velocity for this input
mapping is shown below, where the yaw rate target is a function of user command and vehicle velocity.
5
4.5
4
3.5
3
2.5
2
Yaw Rate Target (rad/s)
1.5
1
0.5
0
0 1 2 3 4 5 6 7 8
Figure 62: Yaw Rate Target vs. Vehicle Velocity: Lateral Acceleration-Based Mapping
Yaw Rate Lateral Acceleration-Based Input Mapping
Norm Yaw Cmd = 0.2[ ]
Norm Yaw Cmd = 0.4[ ]
Norm Yaw Cmd = 0.6[ ]
Norm Yaw Cmd = 0.8[ ]
Norm Yaw Cmd = 1.0[ ]
Vehicle Velocity (m/s)
There are two configurable parameters stored in NVM that affect this type of input mapping:
1. RMP_CMD_SET_MAXIMUM_TURN_RATE — this shifts the transition velocity and limits the target for the yaw rate.
2. RMP_CMD_SET_MAXIMUM_TURN_ACCEL — the rate of change limit for the yaw rate target.
Copyright © 2014 Segway Inc. All rights reserved.
64
Page 65

RMP 210/220
Standard Input Mapping (cont.)
Velocity Filter
A velocity filter can be set that smooths transitions when large changes in velocity are commanded. This filter limits the rate at which
the acceleration rate can change. It is intended to be used primarily in Balance Mode to limit how quickly the platform tips when
accelerating and decelerating.
This is a first-order Infinite Impulse Response (IIR) filter. It uses one input data point and the most recent filtered data point
to calculate a new filtered value. The frequency at which the filter operates can be set at 4 Hz, 1 Hz, 0.5 Hz, or 0.2 Hz. At larger
frequencies (4.0 Hz) the filter's effect is small. At lower frequencies (0.2 Hz) the filter's effect is much larger.
A side effect of using the filter is that velocity commands become delayed. At 4 Hz the delay is small, but at 0.2 Hz the delay is much
larger. When using the filter it is important to find a balance between how much filtering is applied and how long the delay is.
Figure 63: Velocity Filter – No Filter
Figure 64: Velocity Filter – 1 Hz Filter
Copyright © 2014 Segway Inc. All rights reserved.
65
Page 66

RMP 210/220
RMP Response
For every valid command received, the RMP will respond with the data specified by the User Defined Feedback Bitmaps (UDFBs). It is
important that one understands how the UDFBs function before trying to interpret the feedback in the response.
For details on setting these bitmaps see:
• "RMP_CMD_SET_USER_FB_1_BITMAP," p. 57.
• "RMP_CMD_SET_USER_FB_2_BITMAP," p. 57.
• "RMP_CMD_SET_USER_FB_3_BITMAP," p. 58.
• "RMP_CMD_SET_USER_FB_4_BITMAP," p. 58
For details regarding the data meaning, format, range, and description see the UDFB tables starting on page 70.
An RMP response will contain the data array of 32-bit values specified by the UDFBs plus a CRC-16. Although the CRC is only 16 bits, the
RMP ships all values as 32 bits, including the CRC. The additional 16 bits are null bits placed in front of the CRC. These null bits must be
included when calculating the CRC. For a C/C++ implementation of the CRC see "Cyclic Redundancy Check (CRC)-16," p. 78.
User Dened Feedback Bitmaps
There are 96 system variables that can be selected for feedback. Depending on the user application it may be desirable to receive all
of them or only a subset of them. To facilitate this there are four User Defined Feedback Bitmaps. The UDFBs are stored in non-volatile
memory and can be set using the methods described in "Configuration Commands," p. 51. This allows the user to set the User Defined
Feedback Bitmaps once, and from then on the data in the response packet will be defined by those values.
For example, say a user only wants inertial data. The user would determine the corresponding bits to set in each bitmap. The user would
send the configuration command to set the bitmaps to the desired values. From then on the response message would contain only the
inertial data selected by the user.
If the user wishes to see all the data, the default values can be left alone and all 96 variables will be included in each response packet.
Each bit in each bitmap corresponds to a piece of data in an array. If one lines up the binary values for the UDFBs in order (UDFB1, UDFB2,
UDFB3, UDFB4) there would be one 96-bit value with each bit representing one piece of data in the array. If the bit is set, the data will be
broadcast in the next index; if the bit is cleared, the data will be skipped and the next set bit will determine the next piece of data in the
response. The bitmap tables containing variable names, meaning, type, and range for each bit in each bitmap can be found starting on
page 70.
Usage Examples
The following examples demonstrate the concept of the User Defined Feedback Bitmaps. First the UDFBs are set using the appropriate
configuration commands (see page 57). Thereafter every RMP Response will contain the information specified by the UDFBs.
Depending on whether the communication is over CAN, USB, or UDP the response may be multiple packets or a single large packet. The
following examples demonstrate the connection between setting the bitmaps and the variables sent in the response.
Example 1
First set the UDFBs as shown below. Table 33 provides the information
required to set UDFB1. Adjust the Command ID and Parameter as required
when setting UDFB2, UDFB3, and UDFB4 (see page 57).
UDFB1 = 0x00000003 (bits 0-1)
UDFB2 = 0x00000000 (none)
UDFB3 = 0x00000000 (none)
UDFB4 = 0x00000000 (none)
Each command sent to the RMP will trigger a response message. The
response message contains the values of the UDFB variables currently
enabled plus a CRC-16.
Once all four UDFBs are set, the RMP response will contain these variables:
[UDFB1-bit0, UDFB1-bit1, CRC-16]
Or with variable names from the UDFB tables:
[fault_status_word_1, fault_status_word_2, CRC-16]
The structure of the response packet(s) is described in "CAN Response Structure," p. 68, and "USB and UDP Response Structure," p. 69.
Table 33: Setting UDFB1, Example 1
Item Description
Message ID 0x0501
Command ID 0x00000017
Parameter 0x00000003.
Table 34: RMP Response, Example 1
Item UDFB Variable Name
Variable 1 UDFB1-bit0 fault_status_word_1
Variable 2 UDFB1-bit1 fault_status_word_2
Variable 3 — 0x0000, CRC-16
Copyright © 2014 Segway Inc. All rights reserved.
66
Page 67

RMP Response (cont.)
RMP 210/220
Example 2
Set the UDFBs as shown below. Information on setting UDFBs is found in
"Configuration Commands," p. 51. Information on the feedback bitmaps
themselves is found on page 57. An example of how to set UDFB2 is shown
in Table 35.
UDFB1 = 0x00000003 (bits 0-1)
UDFB2 = 0xF0000000 (bits 28-31)
UDFB3 = 0x00000000 (none)
UDFB4 = 0x00000000 (none)
After the UDFBs are set, all RMP response messages will contain the following
variables:
[UDFB1-bit0, UDFB1-bit1, UDFB2-bit28, UDFB2-bit29, UDFB2-bit30,
UDFB2-bit31, CRC-16]
Or with variable names from the UDFB tables:
[fault_status_word_1, fault_status_word_2, aux_batt_current_A, aux_
batt_temp_degC, abb_system_status, aux_batt_status, CRC-16]
The structure of the response packet(s) is described in "CAN Response
Structure," p. 68, and "USB and UDP Response Structure," p. 69.
Example 3
Set the UDFBs as shown below. Information on setting UDFBs is found in
"Configuration Commands," p. 51. Information on the feedback bitmaps
themselves is found on page 57. An example of how to set UDFB3 is shown
in Table 37.
UDFB1 = 0x80000001 (bits 0, 31)
UDFB2 = 0x00008001 (bits 0, 15)
UDFB3 = 0x00008030 (bits 4-5, 15)
UDFB4 = 0x00000000 (none)
After the UDFBs are set, all RMP response messages will contain the following
variables:
[UDFB1-bit0, UDFB1-bit31, UDFB2-bit0, UDFB2-bit15, UDFB3-bit4,
UDFB3-bit5, UDFB3-bit15, CRC-16]
Or with variable names from the UDFB tables:
[fault_status_word_1, right_rear_vel_mps, left_rear_vel_mps, rear_base_
batt_2_soc, mcu_0_inst_power_W, mcu_1_inst_power_W, fram_dtz_
decel_limit_mps2, CRC-16]
The structure of the response packet(s) is described in "CAN Response
Structure," p. 68, and "USB and UDP Response Structure," p. 69.
Table 35: Setting UDFB2, Example 2
Item Description
Message ID 0x0501
Command ID 0x00000018
Parameter 0xF0000000
Table 36: RMP Response, Example 2
Item UDFB Variable Name
Variable 1 UDFB1-bit0 fault_status_word_1
Variable 2 UDFB1-bit1 fault_status_word_2
Variable 3 UDFB2-bit28 aux_batt_current_A
Variable 4 UDFB2-bit29 aux_batt_temp_degC
Variable 5 UDFB2-bit30 abb_system_status
Variable 6 UDFB2-bit31 aux_batt_status
Variable 7 — 0x0000, CRC
Table 37: Setting UDFB3, Example 3
Item Description
Message ID 0x0501
Command ID 0x00000019
Parameter 0x00008030
Table 38: RMP Response, Example 3
Item UDFB Variable Name
Variable 1 UDFB1-bit0 fault_status_word_1
Variable 2 UDFB1-bit31 right_rear_vel_mps
Variable 3 UDFB2-bit0 left_rear_vel_mps
Variable 4 UDFB2-bit15 rear_base_batt_2_soc
Variable 5 UDFB3-bit4 mcu_0_inst_power_W
Variable 6 UDFB3-bit5 mcu_1_inst_power_W
Variable 7 UDFB3-bit15 fram_dtz_decel_limit_
mps2
Variable 8 — 0x0000, CRC
Copyright © 2014 Segway Inc. All rights reserved.
67
Page 68

RMP 210/220
RMP Response (cont.)
CAN Response Structure
The CAN interface is structured as in Table 39.
Each CAN message always contains two 32-bit values.
The values are assembled as such:
Value1 = U32_T ((byte0 << 24) & 0xFF000000) |
((byte1 << 16) & 0x00FF0000) |
((byte2 << 8) & 0x0000FF00) |
(byte3 & 0x000000FF);
Value2 = U32_T ((byte4 << 24) & 0xFF000000) |
((byte5 << 16) & 0x00FF0000) |
((byte6 << 8) & 0x0000FF00) |
(byte7 & 0x000000FF);
CAN response messages start with the Message ID. The first message in the CAN response will have a Message ID of 0x0502. This
message will contain the first two 32-bit values in the response array. The Message ID will then increment by 1 and send the next two
items. This process will continue until the entire array plus the CRC-16 has been sent.
If the length of the feedback array plus the CRC-16 is odd, the last message will contain the CRC-16 in value 1 and nothing in value 2.
This is because two 32-bit values are sent in each message. In this case, value 2 should be discarded; it is not part of the array. For a
C/C++ implementation of the CRC see "Cyclic Redundancy Check (CRC)-16," p. 78.
Table 39: CAN Response Structure
Item Description
Baud Rate 1 Mbps
Header Standard 11-bit CAN identifier
Data Length Always 8
Data Bytes Bytes 0-3: Value 1
Bytes 4-7: Value 2
Example
Set the UDFBs as shown below. Information on setting UDFBs is found
in "Configuration Commands," p. 51. Information on the feedback
bitmaps themselves is found on page 57.
UDFB1 = 0x80000001 (bits 0, 31)
UDFB2 = 0x00008001 (bits 0, 15)
UDFB3 = 0x00008030 (bits 4-5, 15)
UDFB4 = 0x00000000 (none)
After the UDFBs are set, all RMP response messages will contain the
following variables:
[UDFB1-bit0, UDFB1-bit31, UDFB2-bit0, UDFB2-bit15, UDFB3-bit4,
UDFB3-bit5, UDFB3-bit15, CRC-16]
Or with variable names from the UDFB tables:
[fault_status_word_1, right_rear_vel_mps, left_rear_vel_mps,
rear_base_batt_2_soc, mcu_0_inst_power_W, mcu_1_inst_power_W,
fram_dtz_decel_limit_mps2, CRC-16]
CAN response messages are broken into packets containing two
variables each. In this example, response messages contain eight
variables, so four packets are sent.
The actual message received is shown in Table 41.
Table 41: Example CAN Response
Table 40: RMP Response
Item UDFB Variable Name
Variable 1 UDFB1-bit0 fault_status_word_1
Variable 2 UDFB1-bit31 right_rear_vel_mps
Variable 3 UDFB2-bit0 left_rear_vel_mps
Variable 4 UDFB2-bit15 rear_base_batt_2_soc
Variable 5 UDFB3-bit4 mcu_0_inst_power_W
Variable 6 UDFB3-bit5 mcu_1_inst_power_W
Variable 7 UDFB3-bit15 fram_dtz_decel_limit_
mps2
Variable 8 — 0x0000, CRC
Message CAN SID Value 1 Value 2
1 0x0502 fault_status_word_1 right_rear_vel_mps
2 0x0503 left_rear_vel_mps rear_base_batt_2_soc
3 0x0504 mcu_0_inst_power_W mcu_1_inst_power_W
4 0x0505 fram_dtz_decel_limit_mps2 0x0000, CRC
Copyright © 2014 Segway Inc. All rights reserved.
68
Page 69

RMP 210/220
RMP Response (cont.)
USB and UDP Response Structure
USB and UDP responses are a byte array representing the array of 32-bit response values plus the CRC-16. All values are 32-bits.
Each value can be decoded as:
Value[i] = U32_T ((byte[i×4] << 24) & 0xFF000000) |
((byte[i×4+1] << 16) & 0x00FF0000) |
((byte[i×4+2] << 8) & 0x0000FF00) |
(byte[i×4+3] & 0x000000FF);
Where i is the index of the value in the response array. The response array will always contain the number of 32-bit values specified
by the UDFBs and a CRC-16.
Example
Set the UDFBs as shown below. This is the same configuration as in the
example for "CAN Response Structure," p. 68.
UDFB1 = 0x80000001 (bits 0, 31)
UDFB2 = 0x00008001 (bits 0, 15)
UDFB3 = 0x00008030 (bits 4-5, 15)
UDFB4 = 0x00000000 (none)
After the UDFBs are set, all RMP response messages will contain the
following variables:
[UDFB1-bit0, UDFB1-bit31, UDFB2-bit0, UDFB2-bit15, UDFB3-bit4,
UDFB3-bit5, UDFB3-bit15, CRC-16]
Or with variable names from the UDFB tables:
[fault_status_word_1, right_rear_vel_mps, left_rear_vel_mps,
rear_base_batt_2_soc, mcu_0_inst_power_W, mcu_1_inst_power_W,
fram_dtz_decel_limit_mps2, CRC-16]
USB and UDP response messages are composed of one large packet
containing all the variables.
The actual message received is shown in Table 43.
Table 42: RMP Response
Item UDFB Variable Name
Variable 1 UDFB1-bit0 fault_status_word_1
Variable 2 UDFB1-bit31 right_rear_vel_mps
Variable 3 UDFB2-bit0 left_rear_vel_mps
Variable 4 UDFB2-bit15 rear_base_batt_2_soc
Variable 5 UDFB3-bit4 mcu_0_inst_power_W
Variable 6 UDFB3-bit5 mcu_1_inst_power_W
Variable 7 UDFB3-bit15 fram_dtz_decel_limit_
mps2
Variable 8 — 0x0000, CRC-16
Table 43: Example RMP Response
Data Byte Item Description
Data[0] — Data[1] Message ID 0x0502
Data[2] — Data[5] Variable 1 fault_status_word_1
Date[6] — Date[9] Variable 2 right_rear_vel_mps
Data[10] — Data[13] Variable 3 left_rear_vel_mps
Data[14] — Data[17] Variable 4 rear_base_batt_2_soc
Data[18] — Data[21] Variable 5 mcu_0_inst_power_W
Data[22] — Data[25] Variable 6 mcu_1_inst_power_W
Data[26] — Data[29] Variable 7 fram_dtz_decel_limit_mps2
Data[30] — Data[31] Variable 8 Data[30] — Data[31]: 0x0000
Copyright © 2014 Segway Inc. All rights reserved.
Data[32] — Data[33]: CRC-16
69
Page 70

RMP 210/220
RMP Response (cont.)
User Dened Feedback Bitmap 1
The following table describes the variables defined by each bit in UDFB1. The masks associated with UDFB1 for ease of implementing a
parsing algorithm are:
FLOATING_POINT_MASK = 0xFF7FF900
INTEGER_MASK = 0x008006FF
Table 44: User Dened Feedback Bitmap 1
Bit Value Variable Name Format Unit Description
0x00000001 fault_status_word_1 U32_T Unitless Fault status word 1
0x00000002 fault_status_word_2 U32_T Unitless Fault status word 2
0x00000004 fault_status_word_3 U32_T Unitless Fault status word 3
0x00000008 fault_status_word_4 U32_T Unitless Fault status word 4
0x00000010 mcu_0_fault_status U32_T Unitless MCU 0 internal fault status
0x00000020 mcu_1_fault_status
0x00000040 mcu_2_fault_status
0x00000080 mcu_3_fault_status
0x00000100 frame_count Float32 Seconds The operational runtime in seconds since the last power on
0x00000200 operational_state U32_T Unitless CCU Init: 0
0x00000400 dynamic_response U32_T Unitless No Response: 0x00000000
0x00000800 min_propulsion_batt_soc Float32 Percentage The minimum of all propulsion battery states of charge
0x00001000 aux_batt_soc Float32 Percentage The auxiliary battery state of charge
0x00002000 inertial_x_acc_g
0x00004000 inertial_y_acc_g
0x00008000 inertial_x_rate_rps
0x00010000 inertial_y_rate_rps
0x00020000 inertial_z_rate_rps
0x00040000 pse_pitch_deg
0x00080000 pse_pitch_rate_dps
0x00100000 pse_roll_deg
0x00200000 pse_roll_rate_dps
0x00400000 pse_yaw_rate_dps
1
1
1
U32_T Unitless MCU 1 internal fault status
U32_T Unitless MCU 2 internal fault status
U32_T Unitless MCU 3 internal fault status
Init Propulsion: 1
Check_Startup_Issues: 2
Standby Mode: 3
Tractor Mode: 4
Disable Power: 5
Zero Speed: 0x00000002
Limit Speed: 0x00000004
Decel to Zero: 0x00000008
Disable MCU0: 0x00000100
Disable MCU1 0x00000200
Disable MCU2: 0x00000400
Disable MCU3: 0x00000800
Disable Response: 0x00001000
2
2
2
2
2
2
2
2
2
2
Float32 g The raw x axis acceleration
Float32 g The raw y axis acceleration
Float32 rad/s The raw x rotational rate
Float32 rad/s The raw y rotational rate
Float32 rad/s The raw z rotational rate
Float32 deg The estimated inertial pitch angle
Float32 deg/s The estimated inertial pitch rate
Float32 deg The estimated inertial roll angle
Float32 deg/s The estimated inertial roll rate
Float32 deg/s The estimated inertial yaw rate
Copyright © 2014 Segway Inc. All rights reserved.
70
Page 71

RMP 210/220
RMP Response (cont.)
Table 44: User Dened Feedback Bitmap 1 (cont.)
Bit Value Variable Name Format Unit Description
0x00800000 pse_data_is_valid
2
U32_T Unitless This is a bitmap of valide PSE data. There are two PSEs
running on the CCU: one for each redundant side of the BSA.
If the value is zero, PSE data should be discarded.
No_PSE_valid: 0x00000000
PSE1_valid: 0x00000001
PSE2:valid: 0x00000002
0x01000000 yaw_rate_limit_rps Float32 rad/s The machine yaw rate limit, including internal limits set by
the Safety Kernel
0x02000000 vel_limit_mps Float32 m/s The machine velocity limit, including internal limits set by
the Safety Kernel
0x04000000 linear_accel_msp2 Float32 m /s
2
Linear acceleration derived from wheel velocities
0x08000000 linear_vel_mps Float32 m /s Linear velocity of the RMP
0x10000000 differential_wheel_vel_rps Float32 rad/s Differential wheel speed (yaw rate) of the RMP derived using
wheel velocities
0x20000000 right_front_vel_mps Float32 m/s Right front wheel velocity
0x40000000 left_front_vel_mps Float32 m/s Left front wheel velocity
0x80000000 right_rear_vel_mps Float32 m/s Right rear wheel velocity
1
Note that the MCU data available is dependent on the number of MCUs in the RMP.
2
Note that the availability of inertial data is dependent on a BSA being present in the RMP. If your system does not have a BSA, this
data will be set to zero. BSA upgrades are available from Segway Inc.
Copyright © 2014 Segway Inc. All rights reserved.
71
Page 72

RMP 210/220
RMP Response (cont.)
User Dened Feedback Bitmap 2
The following table describes the variables defined by each bit in UDFB2. The masks associated with UDFB2 for ease of implementing a
parsing algorithm are:
FLOATING_POINT_MASK = 0x3FFFFFFF
INTEGER_MASK = 0xC0000000
Table 45: User Dened Feedback Bitmap 2
Bit Value Variable Name Format Unit Description
0x00000001 left_rear_vel_mps Float32 m/s Left rear wheel velocity
0x00000002 right_front_pos_m Float32 m Right front wheel linear displacement
0x00000004 left_front_pos_m Float32 m Left front wheel linear displacement
0x00000008 right_rear_pos_m
0x00000010 left_rear_pos_m
0x00000020 linear_pos_m Float32 m RMP linear displacement
0x00000040 right_front_current_A0pk Float32 A (0-peak) Total right front motor current
0x00000080 left_front_current_A0pk Float32 A (0-peak) Total left front motor current
0x00000100 right_rear_current_A0pk
0x00000200 left_rear_current_A0pk
0x00000400 max_motor_current_A0pk Float32 A (0-peak) Maximum motor current of all motors
0x00000800 right_front_current_limit_
A0pk
0x00001000 left_front_currrent_limit_
A0pk
0x00002000 right_rear_current_limit_
1
A0pk
0x00004000 left_rear_current_limit_
1
A0pk
0x00008000 min_motor_current_limit_
A0pk
0x00010000 front_base_batt_1_soc Float32 Percentage Front powerbase front battery state of charge
0x00020000 front_base_batt_2_soc
0x00040000 rear_base_batt_1_soc
0x00080000 rear_base_batt_2_soc
0x00100000 front_base_batt_1_temp_
degC
0x00200000 front_base_batt_2_temp_
2
degC
0x00400000 rear_base_batt_1_temp_
1
degC
0x00800000 rear_base_batt_2_temp_
1
degC
0x01000000 vel_target_mps Float32 m/s Velocity controller target
0x02000000 yaw_rate_target_rps Float32 rad/s Yaw controller target
1
1
Float32 m Right rear wheel linear displacement
Float32 m Left rear wheel linear displacement
1
Float32 A (0-peak) Total right rear motor current
1
Float32 A (0-peak) Total left rear motor current
Float32 A (0-peak) Minimum right front motor current limit (each motor is
redundant)
Float32 A (0-peak) Minimum left front motor current limit (each motor is
redundant)
Float32 A (o-peak) Minimum right rear motor current limit (each motor is
redundant)
Float32 A (0-peak) Minimum left rear motor current limit (each motor is
redundant)
Float32 A (0-peak) Minimum motor current limit of all motors
2
Float32 Percentage Front powerbase rear battery state of charge
1
1
Float32 Percentage Rear powerbase front battery state of charge
Float32 Percentage Rear powerbase rear battery state of charge
Float32 °C Front powerbase front battery temperature
Float32 °C Front powerbase rear battery temperature
Float32 °C Rear powerbase front battery temperature
Float32 °C Rear powerbase rear battery temperature
Copyright © 2014 Segway Inc. All rights reserved.
72
Page 73

RMP 210/220
RMP Response (cont.)
Table 45: User Dened Feedback Bitmap 2 (cont.)
Bit Value Variable Name Format Unit Description
0x04000000 angle_target_deg
0x80000000 aux_batt_voltage_V
0x10000000 aux_batt_current_A
0x20000000 aux_batt_temp_degC
0x40000000 abb_system_status
0x80000000 aux_batt_status
1
Note that the motor data available is dependent on the number of powerbases in the system. This also pertains to propulsion battery
3
4
4
4
4
4
Float32 Degrees Angle target (for omni platforms)
Float32 VDC Auxiliary battery voltage
Float32 A (0-peak) Auxiliary battery current
Float32 °C Auxiliary battery temperature
U32_T Unitless ABB system status
U32_T Unitless ABB battery status
data. If there is only one powerbase, only the "front" powerbase data will be available; all other powerbase data will be set to zero.
2
Note that on single powerbase machines with only one MCU, the front powerbase rear battery does not exist; therefore the data is set to
zero.
3
Only valid on Omni platforms.
4
Note that on systems without an ABB this data is set to zero.
Copyright © 2014 Segway Inc. All rights reserved.
73
Page 74

RMP 210/220
RMP Response (cont.)
User Dened Feedback Bitmap 3
The following table describes the variables defined by each bit in UDFB3. The masks associated with UDFB3 for ease of implementing a
parsing algorithm are:
FLOATING_POINT_MASK = 0x1FE4700F
INTEGER_MASK = 0x001B8FF0
Table 46: User Dened Feedback Bitmap 3
Bit Value Variable Name Format Unit Description
0x00000001 aux_batt_faults
0x00000002 7p2V_battery_voltage
0x00000004 sp_sw_build_id U32_T int The Segway Processor Build ID
0x00000008 uip_sw_build_id U32_T int The User Interface Processor Build ID
0x00000010 mcu_0_inst_power_W
0x00000020 mcu_1_inst_power_W
0x00000040 mcu_2_inst_power_W
0x00000080 mcu_3_inst_power_W
0x00000100 mcu_0_total_energy_Wh
0x00000200 mcu_1_total_energy_Wh
0x00000400 mcu_2_total_energy_Wh
0x00000800 mcu_3_total_energy_Wh
0x00001000 fram_vel_limit_mps Float32 m/s User velocity limit stored in NVM
0x00002000 fram_accel_limit_mps2 Float32 m/s
0x00004000 fram_decel_limit_mps2 Float32 m /s
0x00008000 frame_dtz_decel_limit_
mps2
0x00010000 fram_coastdown_decel_
mps2
0x00020000 fram_yaw_rate_limit_rps Float32 rad/s User defined yaw rate limit stored in NVM
0x00040000 fram_yaw_accel_limit_rps2 Float32 rad/s
0x00080000 fram_tire_diameter_m Float32 m RMP tire diameter stored in NVM
0x00100000 fram_wheel_base_length_m Float32 m RMP wheel base length stored in NVM
0x00200000 fram_wheel_track_width_m Float32 m RMP track width (lateral distance between tires) stored in
0x00400000 fram_transmission_ratio Float32 Unitless
0x00800000 fram_config_bitmap U32_T Unitless Input mapping and audio silence configuration bitmap
1
2
1
1
1
1
U32_T Unitless ABB battery faults
Float32 VDC CCU 7.2V measured pack voltage
Float32 Watts Instantaneous power consumed by MCU0
Float32 Watts Instantaneous power consumed by MCU1
Float32 Watts Instantaneous power consumed by MCU2
Float32 Watts Instantaneous power consumed by MCU3
1
Float32 Watt-hours Total energy consumed by MCU0
1
Float32 Watt-hours Total energy consumed by MCU1
1
Float32 Watt-hours Total energy consumed by MCU2
1
Float32 Watt-hours Total energy consumed by MCU3
3
3
3
3
(RMP_CMD_SET_MAXIMUM_VELOCITY)
2
User acceleration limit stored in NVM
(RMP_CMD_SET_MAXIMUM_ACCELERATION)
2
User defined deceleration limit stored in NVM
(RMP_CMD_SET_MAXIMUM_DECELERATION)
Float32 m/s
2
User defined DTZ decel limit stored in NVM
(RMP_CMD_SET_MAXIMUM_DTZ_DECEL_RATE)
Float32 m/s
2
Acceleration-based mapping coastdown acceleration stored
in NVM
(RMP_CMD_SET_COASTDOWN_ACCEL)
(RMP_CMD_SET_MAXIMUM_TURN_RATE)
2
User yaw acceleration limit stored in NVM
(RMP_CMD_SET_MAXIMUM_TURN_ACCEL)
(RMP_CMD_SET_TIRE_DIAMETER)
(RMP_CMD_SET_WHEEL_BASE_LENGTH)
NVM (RMP_CMD_SET_WHEEL_TRACK_WIDTH)
RMP transmission (gearbox) ratio stored in NVM
ratio
(RMP_CMD_SET_TRANSMISSION_RATIO)
stored in NVM
(RMP_CMD_SET_INPUT_CONFIG_BITMAP)
Copyright © 2014 Segway Inc. All rights reserved.
74
Page 75

RMP 210/220
RMP Response (cont.)
Table 46: User Dened Feedback Bitmap 3 (cont.)
Bit Value Variable Name Format Unit Description
0x01000000 fram_eth_ip_address U32_T Unitless RMP Ethernet IP address stored in NVM
(RMP_CMD_SET_ETH_IP_ADDRESS)
0x02000000 fram_eth_port_number U32_T Unitless RMP Ethernet port number stored in NVM
(RMP_CMD_SET_ETH_PORT_NUMBER)
0x04000000 fram_eth_subnet_mask U32_T Unitless RMP Ethernet subnet mask stored in NVM
(RMP_CMD_SET_ETH_SUBNET_MASK)
0x08000000 fram_eth_gateway U32_T Unitless RMP Ethernet gateway stored in NVM
(RMP_CMD_SET_ETH_GATEWAY)
0x10000000 user_feedback_bitmap_1 U32_T Unitless User Defined Feedback Bitmap 1 stored in NVM
(RMP_CMD_SET_USER_FB_1_BITMAP)
0x20000000 user_feedback_bitmap_2 U32_T Unitless User Defined Feedback Bitmap 2 stored in NVM
(RMP_CMD_SET_USER_FB_2_BITMAP)
0x40000000 user_feedback_bitmap_3 U32_T Unitless User Defined Feedback Bitmap 3 stored in NVM
(RMP_CMD_SET_USER_FB_3_BITMAP)
0x80000000 user_feedback_bitmap_4 U32_T Unitless User Defined Feedback Bitmap 4 stored in NVM
(RMP_CMD_SET_USER_FB_4_BITMAP)
1
Note that on systems without an ABB this data is set to zero.
2
Note that on systems without a 7.2 V battery this data is set to zero.
3
Since power on.
Copyright © 2014 Segway Inc. All rights reserved.
75
Page 76

RMP 210/220
RMP Response (cont.)
User Dened Feedback Bitmap 4
UDFB4 is for future expansion and therefore contains no valid bits. The masks associated with UDFB4 for ease of implementing a parsing
algorithm are:
FLOATING_POINT_MASK = 0x00000000
INTEGER_MASK = 0x00000000
Copyright © 2014 Segway Inc. All rights reserved.
76
Page 77

RMP 210/220
IEEE754 32-bit Floating Point and Integer Representation
For background on the IEEE754 standard see http://en.wikipedia.org/wiki/IEEE_754-2008.
For a 32-bit CPU or Microprocessor that conforms to the IEEE754 format, the following functions would be used to convert back and forth
between integer and floating point representation:
Where U32_T is a 32-bit unsigned integer and Float32 is a 32-bit single precision floating point number.
//----------------------------------------------------------------------------
// convert_oat32_to_u32
//
// \brief Converts a Float32 value to U32_T in the same bit pattern
//
// \param Float32 to be converted
//
// \return Converted value
//
//----------------------------------------------------------------------------
U32_T convert_oat32_to_u32(Float32 value)
{
//
// Convert the pointer to the Float value to a U32_T pointer
// and return the dereferenced value.
//
//lint -save -e740
return (*((U32_T*)&value));
//lint -restore
}
//----------------------------------------------------------------------------
// convert_u32_to_oat32
//
// \brief Converts a U32_T value to Float32 in the same bit pattern
//
// \param U32_T to be converted
//
// \return Converted value
//
//----------------------------------------------------------------------------
Float32 convert_u32_to_oat32(U32_T value)
{
//
// Convert the pointer to the Float value to a U32_T pointer
// and return the dereferenced value.
//
//lint -save -e740
return (*((Float32*)&value));
//lint -restore
}
Copyright © 2014 Segway Inc. All rights reserved.
77
Page 78

Cyclic Redundancy Check (CRC)-16
For information about CRC calculations see http://en.wikipedia.org/wiki/Cyclic_redundancy_check.
//----------------------------------------------------------------------------
//COPYRIGHT © 2011 SEGWAY Inc.
//
//Contains condential and proprietary information which may not be copied,
//disclosed or used by others except as expressly authorized in writing
//by SEGWAY, Inc.
//
// \le tk_crc.c
//
// \brief This module contains basic functions for data transfer level
// error checking
//
// \platform RMP Auxiliary Battery Board
//
//----------------------------------------------------------------------------
#include "denes.h"
#include "tk_crc.h"
#include "types.h"
//
// CRC table denes
//
#dene CRC_ADJUSTMENT 0xA001
#dene CRC_TABLE_SIZE 256
#dene INITIAL_CRC (0)
RMP 210/220
//
// The CRC table
//
static U16_T crc_table[CRC_TABLE_SIZE];
//
// Private function prototypes
//
static U16_T compute_crc_table_value(U16_T the_byte);
//----------------------------------------------------------------------------
// tk_crc_initialize
//
// \brief Initialize the crc table
//
// \param void
//
// \return void
//
//----------------------------------------------------------------------------
void tk_crc_initialize(void)
{
U16_T byte;
for(byte = 0; byte < CRC_TABLE_SIZE; byte++)
{
crc_table[byte] = compute_crc_table_value(byte);
}
}
//----------------------------------------------------------------------------
// tk_crc_calculate_crc_16
//
// \brief This computes an updated CRC 16 given the current value of
Copyright © 2014 Segway Inc. All rights reserved.
78
Page 79

Cyclic Redundancy Check (CRC)-16 (cont.)
// the CRC 16 and a new data byte.
//
// \param old_crc: the CRC from the last calculation
// new_byte: the new byte to add to the CRC calculation
//
// \return U16_T the new CRC
//
//----------------------------------------------------------------------------
U16_T tk_crc_calculate_crc_16(U16_T old_crc, U8_T new_byte)
{
U16_T temp;
U16_T new_crc;
temp = old_crc ^ new_byte;
new_crc = (old_crc >> 8) ^ crc_table[temp & 0x00FF];
return (new_crc);
}
//----------------------------------------------------------------------------
// tk_crc_compute_byte_buffer_crc
//
// \brief This function computes the CRC-16 value for the passed in
// buffer. The newly computed CRC is saved into the last
// 2 spots in the byte buffer.
//
// \param *byte_buffer: pointer to the byte buffer which we want to CRC
// bytes_in_buffer: number of bytes in the buffer
//
// \return void
//
//----------------------------------------------------------------------------
void tk_crc_compute_byte_buffer_crc(U8_T *byte_buffer, U32_T bytes_in_buffer)
{
U32_T count;
U32_T crc_index = bytes_in_buffer - 2;
U16_T new_crc = INITIAL_CRC;
RMP 210/220
//
// We'll loop through each word of the message and update
// the CRC. Start with the value chosen for CRC initialization.
//
for(count = 0; count < crc_index; count++)
{
//
// Now we'll send each byte to the CRC calculation.
//
new_crc = tk_crc_calculate_crc_16(new_crc, byte_buffer[count]);
}
//
// The new CRC is saved in the last word.
//
byte_buffer[crc_index] = (U8_T)((new_crc & 0xFF00) >> 8);
byte_buffer[crc_index+1] = (U8_T)(new_crc & 0x00FF);
}
//----------------------------------------------------------------------------
// tk_crc_byte_buffer_crc_is_valid
Copyright © 2014 Segway Inc. All rights reserved.
79
Page 80

Cyclic Redundancy Check (CRC)-16 (cont.)
//
// \brief This function computes the CRC-16 value for the passed in
// buffer. This new CRC is compared to the last value stored
// in the buffer (which is assumed to be the CRC-16 for the
// buffer).
//
// \param *byte_buffer: pointer to the byte buffer which we want check the
// CRC
// bytes_in_buffer: number of bytes in the buffer
//
// \return TRUE if CRC is valid; FALSE otherwise
//
//----------------------------------------------------------------------------
BOOLEAN_T tk_crc_byte_buffer_crc_is_valid(U8_T *byte_buffer, U32_T bytes_in_buffer)
{
U32_T count;
U32_T crc_index = bytes_in_buffer - 2;
U16_T new_crc = INITIAL_CRC;
U16_T received_crc = INITIAL_CRC;
BOOLEAN_T success;
//
// We'll loop through each word of the message and update
// the CRC. Start with the value chosen for CRC initialization.
//
for(count = 0; count < crc_index; count++)
{
new_crc = tk_crc_calculate_crc_16(new_crc, byte_buffer[count]);
}
RMP 210/220
//
// The new CRC is checked against that stored in the buffer.
//
received_crc = ((byte_buffer[crc_index] << 8) & 0xFF00);
received_crc |= (byte_buffer[crc_index+1] & 0x00FF);
if (received_crc == new_crc)
{
success = TRUE;
}
else
{
success = FALSE;
}
return (success);
}
//----------------------------------------------------------------------------
// compute_crc_table_value
//
// \brief computes the table value for a given byte
//
// \param the_byte: the byte index in the table
//
// \return void
//
//----------------------------------------------------------------------------
static U16_T compute_crc_table_value(U16_T the_byte)
{
U16_T j;
U16_T k;
Copyright © 2014 Segway Inc. All rights reserved.
80
Page 81

Cyclic Redundancy Check (CRC)-16 (cont.)
U16_T table_value;
k = the_byte;
table_value = 0;
for(j = 0; j < 8; j++)
{
if (((table_value ^ k) & 0x0001) == 0x0001)
{
table_value = (table_value >> 1) ^ CRC_ADJUSTMENT;
}
else
{
table_value >>= 1;
}
k >>= 1;
}
return (table_value);
}
RMP 210/220
Copyright © 2014 Segway Inc. All rights reserved.
81
Page 82

Fault Status Definitions
"""------------------------------------------------------------------------
RMP Fault denitions
This section is used to dene the decoding of fault status words sent
by the RMP. The meaning of specic faults can be found in the Troubleshooting
Section of the RMP User Manual.
------------------------------------------------------------------------"""
NO_FAULT = 0x00000000
ALL_FAULTS = 0xFFFFFFFF
"""
Transient faults: These faults are not latching and can be asserted and then
cleared during runtime. There are currently no transient faults for the RMP
"""
transient_fault_decode = dict({
0x00000000: ""});
RMP 210/220
"""
Critical faults: These faults are latching.
"""
critical_fault_decode = dict({
0x00000000: "",
0x00000001:"CRITICAL_FAULT_INIT",
0x00000002:"CRITICAL_FAULT_INIT_UIP_COMM",
0x00000004:"CRITICAL_FAULT_INIT_PROPULSION",
0x00000008:"CRITICAL_FAULT_INIT_TIMEOUT",
0x00000010:"CRITICAL_FAULT_FORW_SPEED_LIMITER_HAZARD",
0x00000020:"CRITICAL_FAULT_AFT_SPEED_LIMITER_HAZARD",
0x00000040:"CRITICAL_FAULT_CHECK_STARTUP",
0x00000080:"CRITICAL_FAULT_APP_VELOCITY_CTL_FAILED",
0x00000100:"CRITICAL_FAULT_APP_POSITION_CTL_FAILED",
0x00000200:"CRITICAL_FAULT_ABB_SHUTDOWN",
0x00000400:"CRITICAL_FAULT_AP_MODE_TRANS_TIMEOUT",
0x00000800:"CRITICAL_FAULT_PITCH_ANGLE_EXCEEDED",
0x00001000:"CRITICAL_FAULT_ROLL_ANGLE_EXCEEDED",
0x00002000:"CRITICAL_FAULT_BSB_INIT_FAILED",
0x00004000:"CRITICAL_FAULT_BSB_COMM_FAILED",
0x00008000:"CRITICAL_FAULT_BSB_LOST_POWER",
0x00010000:"CRITICAL_FAULT_BSB_HW_FAULT"})
Copyright © 2014 Segway Inc. All rights reserved.
82
Page 83

Fault Status Denitions (cont.)
"""
Communication faults: These faults are latching.
"""
comm_fault_decode = dict({
0x00000000: "",
0x00000001:"COMM_FAULT_UIP_MISSING_UIP_DATA",
0x00000002:"COMM_FAULT_UIP_UNKNOWN_MESSAGE_RECEIVED",
0x00000004:"COMM_FAULT_UIP_BAD_CHECKSUM",
0x00000008:"COMM_FAULT_UIP_TRANSMIT",
0x00000010:"COMM_FAULT_UI_BAD_MOTION_CMD",
0x00000020:"COMM_FAULT_UI_UNKNOWN_CMD",
0x00000040:"COMM_FAULT_UI_BAD_PACKET_CHECKSUM"})
"""
MCU faults: These faults are latching.
"""
mcu_fault_decode = dict({
0x00000000: "",
0x00000001:"MCU_FAULT_MCU_0_IS_DEGRADED",
0x00000002:"MCU_FAULT_MCU_0_IS_FAILED",
0x00000004:"MCU_FAULT_MCU_0_REQUESTS_REDUCED_PERFORMANCE",
0x00000008:"MCU_FAULT_MCU_0_REQUESTS_ZERO_SPEED",
0x00000010:"MCU_FAULT_MCU_1_IS_DEGRADED",
0x00000020:"MCU_FAULT_MCU_1_IS_FAILED",
0x00000040:"MCU_FAULT_MCU_1_REQUESTS_REDUCED_PERFORMANCE",
0x00000080:"MCU_FAULT_MCU_1_REQUESTS_ZERO_SPEED",
0x00000100:"MCU_FAULT_MCU_2_IS_DEGRADED",
0x00000200:"MCU_FAULT_MCU_2_IS_FAILED",
0x00000400:"MCU_FAULT_MCU_2_REQUESTS_REDUCED_PERFORMANCE",
0x00000800:"MCU_FAULT_MCU_2_REQUESTS_ZERO_SPEED",
0x00001000:"MCU_FAULT_MCU_3_IS_DEGRADED",
0x00002000:"MCU_FAULT_MCU_3_IS_FAILED",
0x00004000:"MCU_FAULT_MCU_3_REQUESTS_REDUCED_PERFORMANCE",
0x00008000:"MCU_FAULT_MCU_3_REQUESTS_ZERO_SPEED",
0x00010000:"MCU_FAULT_MISSING_MCU_0_DATA",
0x00020000:"MCU_FAULT_MISSING_MCU_1_DATA",
0x00040000:"MCU_FAULT_MISSING_MCU_2_DATA",
0x00080000:"MCU_FAULT_MISSING_MCU_3_DATA",
0x00100000:"MCU_FAULT_UNKNOWN_MESSAGE_RECEIVED"})
RMP 210/220
Copyright © 2014 Segway Inc. All rights reserved.
83
Page 84

Fault Status Denitions (cont.)
"""
Dene a mask to indicate that the CCU has detected the fault and not the MCU
"""
CCU_DETECTED_MCU_FAULT_MASK = 0x001F0000
"""
Sensor faults: These faults are latching.
"""
sensor_fault_decode = dict({
0x00000000: "",
0x00000001:"SENSOR_FAULT_2P5V_VREF_RANGE_FAULT",
0x00000002:"SENSOR_FAULT_7P2V_VBAT_RANGE_FAULT",
0x00000004:"SENSOR_FAULT_7P2V_VBAT_WARNING",
0x00000008:"SENSOR_FAULT_7P2V_BATT_INBALANCE_FAULT",
0x00000010:"SENSOR_FAULT_7P2V_BATT_TEMPERATURE_FAULT",
0x00000020:"SENSOR_FAULT_DIGITAL_INPUT",
0x00000040:"SENSOR_FAULT_RANGE",
0x00000080:"SENSOR_FAULT_DEFAULT",
0x00000100:"SENSOR_FAULT_5V_MONITOR_RANGE_FAULT",
0x00000200:"SENSOR_FAULT_12V_MONITOR_RANGE_FAULT"})
RMP 210/220
"""
BSA faults: These faults are latching.
"""
bsa_fault_decode = dict({
0x00000000: "",
0x00000001:"BSA_FAULT_SIDE_A_MISSING_BSA_DATA",
0x00000002:"BSA_FAULT_SIDE_B_MISSING_BSA_DATA",
0x00000004:"BSA_FAULT_UNKNOWN_MESSAGE_RECEIVED",
0x00000008:"BSA_FAULT_TRANSMIT_A_FAILED",
0x00000010:"BSA_FAULT_TRANSMIT_B_FAILED",
0x00000020:"BSA_FAULT_DEFAULT",
0x00000040:"BSA_FAULT_SIDE_A_RATE_SENSOR_SATURATED",
0x00000080:"BSA_FAULT_SIDE_B_RATE_SENSOR_SATURATED",
0x00000100:"BSA_FAULT_SIDE_A_TILT_SENSOR_SATURATED",
0x00000200:"BSA_FAULT_SIDE_B_TILT_SENSOR_SATURATED",
0x00000400:"PSE_FAULT_COMPARISON"})
Copyright © 2014 Segway Inc. All rights reserved.
84
Page 85

Fault Status Denitions (cont.)
"""
Architecture faults: These faults are latching.
"""
arch_fault_decode = dict({
0x00000000: "",
0x00000001:"ARCHITECT_FAULT_SPI_RECEIVE",
0x00000002:"ARCHITECT_FAULT_SPI_TRANSMIT",
0x00000004:"ARCHITECT_FAULT_SPI_RECEIVE_OVERRUN",
0x00000008:"ARCHITECT_FAULT_SPI_RX_BUFFER_OVERRUN",
0x00000010:"ARCHITECT_FAULT_COMMANDED_SAFETY_SHUTDOWN",
0x00000020:"ARCHITECT_FAULT_COMMANDED_DISABLE",
0x00000040:"ARCHITECT_FAULT_KILL_SWITCH_ACTIVE",
0x00000080:"ARCHITECT_FAULT_FRAM_CONFIG_INIT_FAILED",
0x00000100:"ARCHITECT_FAULT_FRAM_CONFIG_SET_FAILED",
0x00000200:"ARCHITECT_FAULT_BAD_MODEL_IDENTIFIER",
0x00000400:"ARCHITECT_FAULT_BAD_CCU_HW_REV",
0x00000800:"ARCHITECT_FAULT_DECEL_SWITCH_ACTIVE"})
RMP 210/220
"""
Internal faults: These faults are latching.
"""
internal_fault_decode = dict({
0x00000000: "",
0x00000001:"INTERNAL_FAULT_HIT_DEFAULT_CONDITION",
0x00000002:"INTERNAL_FAULT_HIT_SPECIAL_CASE"})
"""
MCU specic faults: These faults are detected locally by the MCU
"""
mcu_specic_fault_decode = dict({
0x00000000: "",
0x00000001:"MCU_TRANS_BATTERY_TEMP_WARNING",
0x00000002:"MCU_TRANS_BATTERY_COLD_REGEN",
0x00000004:"MCU_UNKNOWN",
0x00000008:"MCU_UNKNOWN",
0x00000010:"MCU_TRANS_LOW_BATTERY",
0x00000020:"MCU_TRANS_BATT_OVERVOLTAGE",
0x00000040:"MCU_CRITICAL_BATT_OVERVOLTAGE",
0x00000080:"MCU_CRITICAL_EMPTY_BATTERY",
0x00000100:"MCU_CRITICAL_BATTERY_TEMP",
Copyright © 2014 Segway Inc. All rights reserved.
85
Page 86

Fault Status Denitions (cont.)
0x00000200:"MCU_COMM_CU_BCU_LINK_DOWN",
0x00000400:"MCU_COMM_INITIALIZATION_FAILED",
0x00000800:"MCU_COMM_FAILED_CAL_EEPROM",
0x00001000:"MCU_POWER_SUPPLY_TRANSIENT_FAULT",
0x00002000:"MCU_POWER_SUPPLY_12V_FAULT",
0x00004000:"MCU_POWER_SUPPLY_5V_FAULT",
0x00008000:"MCU_POWER_SUPPLY_3V_FAULT",
0x00010000:"MCU_JUNCTION_TEMP_FAULT",
0x00020000:"MCU_MOTOR_WINDING_TEMP_FAULT",
0x00040000:"MCU_MOTOR_DRIVE_FAULT",
0x00080000:"MCU_MOTOR_DRIVE_HALL_FAULT",
0x00100000:"MCU_MOTOR_DRIVE_AMP_FAULT",
0x00200000:"MCU_MOTOR_DRIVE_AMP_ENABLE_FAULT",
0x00400000:"MCU_MOTOR_DRIVE_AMP_OVERCURRENT_FAULT",
0x00800000:"MCU_MOTOR_DRIVE_VOLTAGE_FEEDBACK_FAULT",
0x01000000:"MCU_FRAME_FAULT",
0x02000000:"MCU_BATTERY_FAULT",
0x08000000:"MCU_MOTOR_STUCK_RELAY_FAULT",
0x10000000:"MCU_ACTUATOR_POWER_CONSISTENCY_FAULT",
0x20000000:"MCU_ACTUATOR_HALT_PROCESSOR_FAULT",
0x40000000:"MCU_ACTUATOR_DEGRADED_FAULT"})
RMP 210/220
"""
All the fault groups are packed into four 32-bit fault status words. The following
denes how they are packed into the words
"""
"""
Fault status word 0
"""
FSW_ARCH_FAULTS_INDEX = 0
FSW_ARCH_FAULTS_SHIFT = 0
FSW_ARCH_FAULTS_MASK = 0x00000FFF
FSW_CRITICAL_FAULTS_INDEX = 0
FSW_CRITICAL_FAULTS_SHIFT = 12
FSW_CRITICAL_FAULTS_MASK = 0xFFFFF000
Copyright © 2014 Segway Inc. All rights reserved.
86
Page 87

Fault Status Denitions (cont.)
"""
Fault status word 1
"""
FSW_COMM_FAULTS_INDEX = 1
FSW_COMM_FAULTS_SHIFT = 0
FSW_COMM_FAULTS_MASK = 0x0000FFFF
FSW_INTERNAL_FAULTS_INDEX = 1
FSW_INTERNAL_FAULTS_SHIFT = 16
FSW_INTERNAL_FAULTS_MASK = 0x000F0000
"""
Fault status word 2
"""
FSW_SENSORS_FAULTS_INDEX = 2
FSW_SENSORS_FAULTS_SHIFT = 0
FSW_SENSORS_FAULTS_MASK = 0x0000FFFF
FSW_BSA_FAULTS_INDEX = 2
FSW_BSA_FAULTS_SHIFT = 16
FSW_BSA_FAULTS_MASK = 0xFFFF0000
RMP 210/220
"""
Fault status word 3
"""
FSW_MCU_FAULTS_INDEX = 3
FSW_MCU_FAULTS_SHIFT = 0
FSW_MCU_FAULTS_MASK = 0xFFFFFFFF
"""
Fault group index denitions
"""
FAULTGROUP_TRANSIENT = 0;
FAULTGROUP_CRITICAL = 1;
FAULTGROUP_COMM = 2;
FAULTGROUP_SENSORS = 3;
FAULTGROUP_BSA = 4;
FAULTGROUP_MCU = 5;
FAULTGROUP_ARCHITECTURE = 6;
FAULTGROUP_INTERNAL = 7;
NUM_OF_FAULTGROUPS = 8;
Copyright © 2014 Segway Inc. All rights reserved.
87
Page 88

RMP 210/220
Internal Connections
This section describes the hardware connections inside the Segway RMP enclosure. Some of these connections are used within the RMP
for internal communication between components. Other connections are for external communication and can be used to control the RMP.
Additional connections are for sending power between components.
Part numbers are supplied for Segway harnesses. Please reference the harness part number when ordering new harnesses.
J3
Centralized Control Unit
The Segway RMP is designed to allow for the ultimate in flexibility
and control over the platform. Part of this design is the Centralized
Control Unit (CCU), which controls how the RMP functions and
communicates.
The CCU has two processors on the board, each with a unique
function and purpose. The Segway Processor controls the
propulsion system, safety kernel, and other essential functions. The
User Interface Processor controls the Auxiliary Battery Board and
external communication interfaces.
J1
J13
J22
J14
J2
J21
J10
J7
J11
J18
J17
J6
J16
J5
J4
J19
J8
J9
J12
J15
J20
Figure 65: Centralized Control Unit
Table 47: CCU Connectors and Signals
Connector Signal(s) Harness Destination(s) Notes
J1 Boot1 / Boot2 23078-00002 Connector II
J2 MCU Hardware Disable – –
J3 MCU Hardware Disable – –
J4 MCU Hardware Disable 23216-00001 Rear Powerbase
J5 MCU Hardware Disable 23216-00001 Front Powerbase
J6 72 VDC – – Unused
J7 Hobby Radio 23072-00002 Connector I
J8 Disable, DTZ 23078-00002 Connector II
J9 CAN 23256-00001 Powerbases, Chargers SP CAN Channel 1
J10 Debug Headers – – Segway Use Only
J11 Debug Headers – – Segway Use Only
J12 GPIO – – Segway Use Only
J13 Ethernet, USB, CAN 23072-00002 Connector I, ABB J3 External Communication
J14 Programming – – Segway Use Only
J15 Programming – – Segway Use Only
J16 LEDs 23074-00002 Power LED, Status LED
J17 Analog I/O – – Segway Use Only
J18 Analog I/O – – Segway Use Only
J19 Communication – – Segway Use Only
J20 CAN – – SP CAN Channel 2
J21 Power 23075-00002 12 V VAB Power Connector
J22 7.2 VDC 22528-00002 7.2 V Battery Power In
Copyright © 2014 Segway Inc. All rights reserved.
88
Page 89

RMP 210/220
Auxiliary Battery Board
The Auxiliary Battery Board (ABB) communicates with the auxiliary
battery, controls the Power Converters, and communicates with the
CCU.
The ABB can operate either independently or in conjunction with a
CCU.
NOTICE
• Incorrectly connecting power to the ABB can damage the board.
Observe polarity on all inputs and outputs when connecting.
• Fuse is not replacable. If fuse blows, the board must be replaced.
Table 48: ABB Connectors and Signals
J2
J4
J5
J6
J7
J8
Figure 66: Auxiliary Battery Board
J1
J3
J10
J9
Connector Signal(s) Harness Destination(s) Notes
J1 CAN Terminator N/A N /A Jumper
J2 CAN, HV 21276-00002 Charger Charger Input
J3 Ethernet, USB, CAN 23075-00002 12V VAB, CCU J13 Communication
J4 Debug Headers – – Segway Use Only
J5 LEDs – –
J6 Debug Headers – – Segway Use Only
J7 Programming – – Segway Use Only
J8 HV 23076-00001 Power Switch
J9 HV 23075-00001 All VABs Power Output
J10 Battery Connection N /A Battery (Back Side) Battery Connection
Copyright © 2014 Segway Inc. All rights reserved.
89
Page 90

RMP 210/220
Smart Charger Board
The Smart Charger Board (SCB) routes power from the External
Power Supply to the internal components, including the powerbases
and the ABB. It communicates with the powerbases and the ABB. It
also controls the charge status LEDs.
Table 49: SCB Connectors and Signals
Connector Signal(s) Harness Destination(s) Notes
J1 CAN, HV 23216-00001 Rear Powerbase HV Channel
J2 CAN, HV 23216-00001 Front Powerbase HV Channel
J3 CAN, HV 23216-00001 Front Powerbase HV Channel
J4 CAN Terminator N/A N/A Jumper
J5 CAN, HV 23216-00001 Rear Powerbase HV Channel
J6 CAN, HV 21276-00002 ABB J2 HV Channel
J7 HV 23214-00001 Connector IV Charger Input
J8 HV 23214-00001 Connector IV Charger Input
J9 HV 23214-00001 Connector IV Charger Input
J10 HV 23214-00001 Connector IV Charger Input
J11 HV 23214-00001 Connector IV Charger Input
J12 CAN 23256-00001 Powerbases, CCU J9 CAN Channel 1
J13 I/O, Power – – Expansion
J14 CAN – – CAN Channel 1
J15 Communication – – Segway Use Only
J16 CAN Terminator N/A N /A Jumper
J17 LED 23320-00002 LED Battery 1 Status
J18 LED 23320-00002 LED Battery 3 Status
J19 LED 23320-00002 LED Battery 0 Status
J20 LED 23320-00002 LED Aux Battery Status
J21 LED 23320-00002 LED Battery 2 Status
J5
J1
J7
J8
J10
J13
J15
J18
Figure 67: Smart Charger Board
J2
J3
J4
J6
J9
J11
J12
J14
J16
J20J21
J17
J19
Copyright © 2014 Segway Inc. All rights reserved.
90
Page 91

RMP 210/220
Communication
There are a variety of ways to communicate with the RMP inside the enclosure. Communication methods include CAN, USB, and Ethernet.
There is also a hobby radio interface.
CAN
CAN channels utilize galvanic isolation hardware. This allows for CAN communication between systems in which the ground connection
cannot be shared. The CCU has four CAN channels. The ABB has one CAN channel that communicates with the CCU.
• CAN channels utilize galvanic isolation hardware; ground must be connected.
• CAN channels have 120 Ohm terminator between CAN_High and CAN_Low.
User Interface Processor CAN 1
This CAN channel is primarily used for communication between the
RMP and an outside source. This CAN channel is located at CCU J13.
Table 50: UIP CAN 1
J13 Pin Name Notes
13 CAN_High
14 CAN_Low
15 CAN_GND Must be connected to
CAN BUS GND.
User Interface Processor CAN 2
This CAN channel is primarily used for communication between the
CCU and the ABB, if equipped. This CAN channel is located at CCU
J13.
Table 51: UIP CAN 2
J13 Pin Name Notes
17 CAN_High
18 CAN_Low
19 CAN_GND Must be connected to
CAN BUS GND.
Segway Processor CAN 1
This CAN channel is strictly for Segway peripherals. This information
is provided for completeness only. Please contact Segway if you
believe you have a problem with this CAN channel. This CAN Channel
is located at CCU J9.
Table 52: SP CAN 1
J9 Pin Name Notes
1 CAN_High
2 CAN_Low
3 CAN_GND Must be connected to
CAN BUS GND.
Copyright © 2014 Segway Inc. All rights reserved.
91
Page 92

RMP 210/220
Segway Processor CAN 2
This CAN channel is reserved for future Segway peripherals. This
information is provided for completeness only. Please contact
Segway if you believe you have a problem with this CAN channel.
This CAN channel is located at CCU J20.
Table 53: SP CAN 2
J20 Pin Name Notes
1 CAN_High
2 CAN_Low
3 CAN_GND Must be connected to
CAN BUS GND.
ABB CAN
The Auxiliary Battery Board (ABB) has one CAN channel, accessible from both J2 and J3. This CAN channel is used for
communication between the ABB and the CCU. If using the ABB without a CCU this channel can be used to communicate directly
with the ABB.
Table 54: ABB CAN
J2 Pin J3 Pin Name Notes
4 5 CAN_High
3 6 CAN_Low
2 or 5 7 CAN_GND Must be connected to
CAN BUS GND.
Copyright © 2014 Segway Inc. All rights reserved.
92
Page 93

RMP 210/220
USB
There is one user-accessible USB 2.0 compliant interface on the CCU. It can be connected to a standard computer and used as a
communication interface. Windows drivers are supplied with the RMP Demo software (see "USB," p. 46).
CCU USB
This USB interface is primarily used for communication between the
RMP and an outside source. This interface is located at CCU J13.
Table 55: CCU USB
J13 Pin Name USB Plug Pin #
7 USB_VBUS / VCC 1
8 USB_D+ 2
9 USB_D– 3
22 GND 4
— Shield Wire Housing
1
The shield wire must be connectd to the housing of the USB plug and to the chassis of the RMP.
1
Ethernet
There is one 10 Mbps Ethernet interface on the CCU. For details on how to connect to the RMP over an Ethernet connection, see
"Ethernet," p. 45.
CCU Ethernet
This Ethernet interface is primarily used for communication between
the RMP and an outside source. This interface is located at CCU J13.
Table 56: CCU USB
J13 Pin Name RJ45 Pin #
1 ETH_TX+ 1
2 ETH_TX– 2
3 ETH_RX+ 3
4 ETH_RX– 6
Copyright © 2014 Segway Inc. All rights reserved.
93
Page 94

RMP 210/220
Hobby Radio
WARNING!
Extreme care must be taken when setting the "safe" states on the Spektrum radio. The RMP could move in an uncontrolled way. This
could cause, death, serious injury, or property damage.
The CCU allows for the connection of a remote control hobby radio for the purpose of demonstrating the platform in a closed
environment. Due to the nature of the hobby radio protocol and the lack of deterministic error detection, the hobby radio input has the
ability to create un-commanded motion by the RMP. For example, a user could set the "safe" state on their radio to the equivalent of full
speed ahead; if communication with the radio is lost the RMP will go full speed ahead even if though this may not be the desired result.
The hobby radio input is compatible with Spektrum 6-channel air receivers. The input from each channel of the hobby radio is combined
together using diode-OR logic to create one signal which is measured and decoded by the user interface processor. For this reason it does
not matter in what order the channels are connected, as long as all 6 channels are connected.
This interface is located at CCU J7 and on Connector I (see "Connector I," p. 41).
Table 57: CCU Hobby Radio
J7 Pin Name
1 +5 V out to receiver.
2-7 PWM radio control signals.
10 DGND (connect to receiver ground).
Table 58: Connector I Hobby Radio
Con. I Pin Name
k RADIO1
L RADIO2
m RADIO3
M RADIO4
N RADIO5
n RADIO6
P RADIO_GND
K RADIO+5V
The hobby radio interface has only been tested with a Spektrum AR6115 receiver and a Spektrum DX6i transmitter. Other models are not
guaranteed to work.
Be aware that the location of the receiver will affect its ability to receive radio signals. Placing the receiver on the side of the RMP may
create one or more blind spots. Placing the receiver inside the enclosure may block it from receiving any signals at all.
Copyright © 2014 Segway Inc. All rights reserved.
94
Page 95

RMP 210/220
Hobby Radio Conguration
Follow this procedure to configure a Spektrum hobby radio for use with the RMP.
WARNING!
Extreme care must be taken when setting the "safe" states on the Spectrum radio. The RMP could move in an uncontrolled way. To avoid
death, serious injury, or property damage, raise the RMP so the wheels are off the ground before proceeding to configure the hobby radio.
Avoid contact with the wheels while they are spinning.
These instructions assume that you are familiar with using the hobby radio. For more detailed instructions please refer to the
manufacturer's documentation for your hobby radio.
1. Raise the RMP so the wheels are off the ground. This will prevent the RMP from moving unexpectedly while configuring the
hobby radio.
2. On the transmitter, create a new model with the following attributes:
a. Go to the Setup List:
i. Model Type: ACRO
ii. Model Name: RMP
iii. Reverse: Ailerons Reversed
b. Go to the Adjust List, select Flaps, and set the following settings:
i. Norm: 0
ii. Land: ▼100
3. Bind the transmitter and receiver.
a. Prepare the transmitter.
i. Set all switches to 0.
ii. Lower the throttle (left joystick) to the lowest position.
iii. Make sure the transmitter is powered off.
b. Prepare the receiver.
i. Insert the bind plug into the BATT/BIND receptacle.
ii. Connect 5V DC power to the receiver.
iii. The receiver's LED flashes when the receiver is ready to bind.
c. Bind.
i. While holding the Trainer switch, power on the transmitter.
ii. Keep holding the trainer switch until the receiver's LED stays illuminated; this indicates the receiver is bound to
the transmitter.
d. Finish.
i. Remove the bind plug from the receiver.
4. Connect to the RMP.
a. Connect the receiver to the RMP (see Table 57 and Table 58).
b. Flip the Gear switch on the transmitter to 1. This will prevent the RMP from immediately shutting down once the radio
connection is established.
c. Turn on the transmitter.
d. Turn on the RMP. The receiver will turn on after the RMP has started up.
Copyright © 2014 Segway Inc. All rights reserved.
95
Page 96

Hobby Radio Conguration (cont.)
5. Test the controls.
a. Flip the Flap switch to 1 to enter Tractor Mode.
b. Push the left joystick up and to the left. This joystick acts as the deadman switch and must be held left and up for the
RMP to accept drive commands.
c. Use the right stick to command movement.
6. Test the "safe" state.
This test determines what will happen when the RMP loses the radio signal while in use.
a. Use the joysticks to command full motion.
b. While commanding motion, turn off the transmitter.
c. The RMP's wheels should stop moving.
RMP 210/220
Figure 68: Hobby Radio Controls
NOTICE
If holding the left stick in the upper left corner causes the RMP to move (even when not using the right stick to command movement)
follow steps 6 and 7 to adjust the sub-trim and re-bind the transmitter and receiver.
7. Adjust the sub-trim.
a. Go to the Adjust List and select Sub-Trim.
b. Hold the left stick in the upper left corner.
c. Adjust the ailerons until all wheels are moving at the same speed in the same direction.
d. Adjust the elevators until all wheels are stopped.
8. Re-bind the transmitter and receiver.
a. Repeat the bind procedure (step 3 above) to save these adjusted values.
Table 59: Hobby Radio Controls
Control Action
Gear Switch 0 = Send Disable command.
1 = Don't send Disable command.
Flap Switch 0 = Standby Mode
1 = Tractor Mode
Left Joystick Acts as a deadman switch.
Disables movement if not held to far left.
Disables movement if brought all the way down.
Right Joystick Controls RMP motion.
Copyright © 2014 Segway Inc. All rights reserved.
96
Page 97

RMP 210/220
Hardware Controls
The RMP is designed to accept hardware Disable and DTZ requests in case of emergency. A Disable request immediately cuts power
to the motor drives and turns off the RMP. A DTZ request decelerates the RMP and brings it to a stop, then proceeds as in a Disable
request. These modes can also be set via software commands (see "RMP_CMD_SET_OPERATIONAL_MODE," p. 59). CCU J8 provides
connections for both signals.
Table 60: CCU J8
J8 Pin Name
1 +5 V
2 DECEL_REQUEST
3 #DISABLE_5V
4 DGND
Hardware Disable
On the CCU there are four optically isolated outputs (J2, J3, J4, and J5) which allow for control of the hardware disable function on the
MCUs inside the Segway powerbases.
Table 61: MCU Hardware Disable
CCU J2, J3, J4, J5 Name
1 Collector (more positive)
2 Emitter (more negative)
The MCUs have a weak pull up resistor such that if the disable input is allowed to float, the MCU will immediately stop providing power to
the motors. The CCU prevents this from occurring during normal operation by powering up the diode inside the opto-coupler and thereby
connecting the collector to the emitter.
Control of the opto-couplers is accomplished by two different methods:
Method 1 — Internal Segway Logic
At any point if the Segway processor logic needs to immediately disable the system it can do so by releasing one of its DIO lines. This
will stop current flowing and prevent the opto-couplers from pulling down on the disable input.
Method 2 — External Disable Signal
The opto-coupler is powered by Pin 3 of J8. +5 V must be provided to Pin 3 of J8 continuously to prevent the CCU from disabling the
motor drives. Conveniently, +5 V is provided as an output from the CCU on Pin 1 of J8. Therefore, it is possible to connect a normally
closed switch between Pin 3 and Pin 1 to control the disable response. This allows for the simple connection of a Disable Button (such
as the one provided with the RMP).
Hardware DTZ
A Decel To Zero (DTZ) can be initiated in hardware via Pin 2 of J8 on the CCU. This signal is normally pulled low by a 10K Ohm resistor. If
this pin is pulled up to +5 V then the system will immediately being to decelerate. The rate of deceleration is set in software; see "RMP_
CMD_SET_MAXIMUM_DTZ_DECEL_RATE," p. 53.
Conveniently, +5 V is provided on Pin 1 of J8, allowing the user to easily connect a normally open momentary type switch between Pin 2
and Pin 1 of J8 and control the deceleration request. Segway has found this useful when connecting some types of remote control disable
systems.
After the RMP has stopped moving, the system will enter Disable mode and the RMP will shutdown.
Copyright © 2014 Segway Inc. All rights reserved.
97
Page 98

RMP 210/220
Mode Selection
The CCU defaults to normal operation, however, for the purpose of fault troubleshooting or for reloading code the user can change the
mode. Mode selection is via CCU J1.
Table 62: CCU J1
J1 Pin Name Function
1 BOOT1 Diagnostic Mode
2 BOOT2 Bootloader Mode
3 GND Ground
Normal Operation
With Pin 1 and Pin 2 both floating, the CCU operates normally. Connecting either Pin 1 or Pin 2 after the system is running will have no
effect.
Diagnostic Mode
Connecting Pin 1 to Pin 3 sends the BOOT1 signal. If connected at startup, the CCU will enter Diagnostic mode. For details, see
"Diagnostic Mode," p. 37.
Bootloader Mode
Connecting Pin 2 to Pin 3 sends the BOOT2 signal. If connected at startup, the CCU will enter Bootloader mode. For details, see
"Bootloader Mode," p. 37. If both pins 1 and 2 are connected to pin 3 (ground), the CCU will enter Bootloader mode.
Status Indicators
There are two staus indicators on the CCU that are intended to be connected to LEDs (the Power LED and the Status LED on the UI Panel).
On the UI Panel, the Power indicator is a bicolor yellow/red LED and the Status indicator is a green LED. For information on the indicator
LEDs and what their patterns mean see "Powering On," p. 40. Status indicators are connected at CCU J16.
Table 63: Status Indicators
J16 Pin Name
3 Power Indicator (Yellow bicolor LED)
4 Status Indicator (Green LED)
5 Power Indicator (Red bicolor LED)
12 Ground
Copyright © 2014 Segway Inc. All rights reserved.
98
Page 99

RMP 210/220
CCU Input Power
The CCU can receive power from a variety of sources. The table below describes all methods for providing the CCU with power for
operation.
Table 64: CCU Input Power Options
Name DC Voltage Connection Min. (V) Nominal (V) Max. (V) ~Current
Drawn (A)
+12 V Input +12 J21 Pin 1 (+)
11 12.0 13 0.150 Ye s Ye s
Charges +7.2
V Battery?
Boots CCU?
J21 Pin 5 (–)
+72 V Input
1
+72 J6 Pin 6 (+)
45 72 90 0.050 Ye s No
J6 Pin 4 (–)
USB Input +5 J13 Pin 7 (+)
4.5 5 5.5 0.400 No Ye s
J13 Pin 22 (–)
Battery Charge + 7.2 J21 Pin 6 (+)
7. 2 9 13 0.168 Yes No
J21 Pin 5 (–)
7.2 V Battery +7. 2 J22, see below 5.5 6.6 10 0.273 No Ye s
1
+72 V Input is not currently used by any RMP platform.
2
If pins 3 and 4 on J21 are connected.
2
The CCU is designed so that when a particular voltage is applied all voltages less than that voltage are automatically generated when
the board is powered on. For example, when +72 V is applied, the board self generates +12 V, +5 V, +3.3 V, and starts charging the small
two-cell battery if present. Small amounts of current can be taken from these supplies to run logic or support circuitry. The user should
contact Segway if more than a few Watts are needed from any one supply (see "Contact Information," p. 6).
NOTICE
While the +72 V input can power the entire CCU, it does not have the ability to boot the board without some other voltage being present.
That voltage typically comes from the battery supply.
CCU Battery Supply
The CCU can be self-powered from a 7.2 V pack made from two series 3.6 V lithium iron phosphate cells. Use only Segway-approved
battery packs. Connection to the CCU is via J22.
Table 65: CCU Battery Supply
J22 Pin Function
1 +7.2 V (series cell 2)
2 +3.6 V (series cell 1)
3 + side of 10 K thermistor.
4 – side of 10 K thermistor.
5 Battery return.
The CCU will charge the two-cell battery whenever it has enough power and sufficient voltage to do so. The CCU microprocessors do not
need to be powered up for the +7.2 V battery to charge. The microprocessors can be started by connecting J21 Pin 4 to J21 Pin 3. As long
as those two pins are connected, the CCU will use the +7.2 V battery pack.
Coin Cell Battery
The coin cell battery on the CCU maintains power to the Real-Time Clock (RTC). If the battery is removed while the RMP is powered off,
the RTC will reset. This battery is not user replacable. Removing this battery will result in zeroing the clock and will void your warrantee.
Copyright © 2014 Segway Inc. All rights reserved.
99
Page 100

RMP 210/220
Included Software
Segway provides demonstration software so that users may test the RMP and see examples of how to communicate with the RMP. The
software is provided as an example and is not suitable for controlling the RMP in an unstructured environment. Segway does not warranty
or guarantee the performance of this software. Users must create their own software to control the RMP.
The demonstration software provides a reliable configuration that can be used to verify RMP performance during system integration with
a new host computer system.
Where to Get the Software
The software is available as a Windows Installer package and is compatible with
Windows XP, Windows Vista, and Window 7.
The installer is available online at http://rmp.segway.com/forum in the subforum:
"Centralized Controller Platforms".
Installing the Software
The installer creates a file structure that includes documentation, drivers, and demo
applications. Included in the software package are:
• Documentation
• USB drivers
• Bootloader application and release binaries
• OCU demo application and source code
• ABB demo application and source code
The installer also includes Python and all the modules needed to run the demo
software from source. Included Python packages are:
• Python 2.7.2
• pygame 1.9.2
• pyserial 2.6
• py2exe 0.6.9
For a more detailed list of what is included in the software package, see READ_ME_
FIRST.pdf included with the software. That file also includes general instructions on
how to use the demo software.
To install the software, run the RMP_Applications.exe installer program.
1. Accept the software licence.
2. Select which components to install (default is all components).
3. Specify a destination folder.
The default folder is C:\Program Files\Segway
4. Click "Install" to create an RMP_Applications subfolder within the destination
folder specified.
5. When prompted, install Python and its components.
6. When the installation is complete, click "Finish."
To access the software, use the links on the desktop or the links in the Segway folder in
the Start menu.
Figure 69: RMP Applications Installer
NOTICE
By installing this software you have agreed to the software licence agreement (C:\
Program Files\Segway\RMP_Applications\Segway_RMP_SW_LICENSE.txt).
Copyright © 2014 Segway Inc. All rights reserved.
100
 Loading...
Loading...