

Seagate ST500LT035,ST320LT033 Product Manual

Product Manual
Seagate® Ultra Mobile HDD
Zero Gravity Sensor models
ST500LT035
ST320LT033
Gen 9.3
100737403
Rev. C
May 2014
Document Revision History
Revision Date Description of Change
Rev . A 09/06/2013 Initial release.
Rev. B 04/03/2014 4, 11 & 14.
Rev. C 05/02/2014 14.
© 2014 Seagate Technology LLC. All rights reserved.
Publication number: 100737403, Rev. C May 2014
Seagate, Seagate Technology and the Wave logo are registered trademarks of Seagate Technology LLC in the United States and/or
other countries. Seagate Ultra Mobile HDD and SeaTools are either trademarks or registered trademarks of Seagate Technology LLC
or one of its affiliated companies in the United States and/or other countries. All other trademarks or registered trademarks are the
property of their respective owners.
No part of this publication may be reproduced in any form without written permission of Seagate Technology LLC.
Call 877-PUB-TEK1(877-782-8351) to request permission.
When referring to drive capacity , one gigabyte, or GB, equals one billion bytes and one terabyte, or TB, equals one trillion bytes. Y our
computer’s operating system may use a different standard of measurement and report a lower capacity . In addition, some of the listed
capacity is used for formatting and other functions, and thus will not be available for data storage. Actual quantities will vary based on
various factors, including file size, file format, features and application software. Actual data rates may vary depending on operating
environment and other factors. The export or re-export of hardware or software containing encryption may be regulated by the U.S.
Department of Commerce, Bureau of Industry and Security (for more information, visit
and use outside of the U.S. Seagate reserves the right to change, without notice, product offerings or specifications.
www.bis.doc.gov), and controlled for import
CONTENTS
SEAGATE TECHNOLOGY SUPPORT SERVICES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.0 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1 ABOUT THE SERIAL ATA INTERFACE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.0 DRIVE SPECIFICATIONS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 FORMATTED CAPACITY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.1 LBA mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 PHYSICAL ORGANIZATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.3 RECORDING AND INTERFACE TECHNOLOGY. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.4 PHYSICAL CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.5 SEEK TIME . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.6 START/STOP TIMES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.7 POWER SPECIFICATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.7.1 Power consumption . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.7.2 Conducted noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.7.3 Voltage tolerance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.7.4 Power management modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.8 ENVIRONMENTAL SPECIFICATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.8.1 Shock . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.8.2 Vibration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.9 ACOUSTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.9.1 Test for prominent discrete tones (PDTs) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.10 ELECTROMAGNETIC IMMUNITY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.11 RELIABILITY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.12 AGENCY CERTIFICATION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.12.1 Safety certification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.12.2 Electromagnetic Compatibility (EMC). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.12.3 FCC verification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.13 ENVIRONMENTAL PROTECTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.13.1 European Union Restriction of Hazardous Substances (RoHS) Directive. . . . . 12
2.13.2 China Restriction of Hazardous Substances (RoHS) Directive . . . . . . . . . . . . 12
2.14 CORROSIVE ENVIRONMENT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.0 CONFIGURING AND MOUNTING THE DRIVE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1 HANDLING AND STATIC-DISCHARGE PRECAUTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2 CONFIGURING THE DRIVE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2.1 Serial ATA Cables and Connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.3 DRIVE MOUNTING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.0 SERIAL ATA (SATA) INTERFACE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.1 HOT-PLUG COMPATIBILITY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.2 SERIAL ATA DEVICE PLUG CONNECTOR PIN DEFINITIONS . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.3 SUPPORTED ATA COMMANDS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.3.1 Identify Device command. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.3.2 Set Features command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.3.3 S.M.A.R.T. commands. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
SEAGATE ULTRA MOBILE HDD PRODUCT MANUAL, REV. C III

FIGURES
FIGURE 1TYPICAL 5V STARTUP AND OPERATION CURRENT PROFILE . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
FIGURE 2ATTACHING SATA CABLING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
FIGURE 3MOUNTING DIMENSIONS (FOR STANDARD MODELS). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
SEAGATE ULTRA MOBILE HDD PRODUCT MANUAL, REV. C IV
Seagate Technology Support Services
For information regarding online support and services, visit:
Available services include:
http://www.seagate.com/about/contact-us/technical-support/
• Presales & Technical support
• Global Support Services telephone numbers & business hours
• Authorized Service Centers
For information regarding Warranty Support, visit:
For information regarding data recovery services, visit:
For Seagate OEM and Distribution partner portal, visit:
For Seagate reseller portal, visit:
http://www.seagate.com/partners/my-spp-dashboard/
http://www.seagate.com/support/warranty-and-replacements/
http://www.seagate.com/services-software/data-recovery-services/
http://www.seagate.com/partners/
Seagate Ultra Mobile HDD Product Manual, Rev. C 1
1.0 INTRODUCTION
This manual describes the functional, mechanical and interface specifications for the following Seagate® Ultra Mobile HDD model drives:
Zero Gravity Sensor models
ST500LT035 - 1E9G42
ST320LT033 - 1E9G4C
These drives provide the following key features:
5400-RPM spindle speed.
16MB buffer.
Quiet operation. Fluid Dynamic Bearing (FDB) motor.
High instantaneous (burst) data-transfer rates (up to 6Gb/s).
Perpendicular recording technology.
State-of-the-art cache and on-the-fly error-correction algorithms.
Native Command Queuing (NCQ) with command ordering.
Full-track multiple-sector transfer capability without local processor intervention.
1000 Gs nonoperating shock and 400 Gs of operating shock.
SeaTools
The 3D Defense System™, which includes Drive Defense, Data Defense and Diagnostic Defense,
offers the industry’s most comprehensive protection for disk drives.
Support for S.M.A.R.T. drive monitoring and reporting.
Support for Read Multiple and Write Multiple commands.
Worldwide Name (WWN) capability uniquely identifies the drive.
TM
diagnostic software performs a drive self-test that eliminates unnecessary drive returns.
1.1 ABOUT THE SERIAL ATA INTERFACE
The Serial ATA interface provides several advantages over the traditional (parallel) ATA interface. The primary advantages include:
Easy installation and configuration with true plug-and-play connectivity. It is not necessary to set any jumpers or other configuration
options.
Thinner and more flexible cabling for improved enclosure airflow and ease of installation.
Scalability to higher performance levels.
In addition, Serial ATA makes the transition from parallel ATA easy by providing legacy software support. Serial ATA was designed to allow
the integrator to install a Serial ATA host adapter and Serial ATA disk drive in the current system and expect all existing applications to work
as normal.
The Serial ATA interface connects each disk drive in a point-to-point configuration with the Serial ATA host adapter. There is no master/
slave relationship with Serial ATA devices like there is with parallel ATA. If two drives are attached on one Serial ATA host adapter, the host
operating system views the two devices as if they were both “masters” on two separate ports. This essentially means both drives behave
as if they are Device 0 (master) devices.
The host adapter may, optionally, emulate a master/slave environment to host software where two
NOTE
The Serial ATA host adapter and drive share the function of emulating parallel ATA device behavior to provide backward compatibility with
existing host systems and software. The Command and Control Block registers, PIO and DMA data transfers, resets, and interrupts are all
emulated.
The Serial ATA host adapter contains a set of registers that shadow the contents of the traditional device registers, referred to as the
Shadow Register Block. All Serial ATA devices behave like Device 0 devices. For additional information about how Serial ATA emulates
parallel ATA, refer to the Serial ATA International Organization: Serial ATA (Revision 3.0). The specification can be downloaded from
www.serialata.org.
devices on separate Serial ATA ports are represented to host software as a Device 0 (master) and Device
1 (slave) accessed at the same set of host bus addresses. A host adapter that emulates a master/slave
environment manages two sets of shadow registers. This is not a typical Serial ATA environment.
SEAGATE ULTRA MOBILE HDD PRODUCT MANUAL, REV. C 2

2.0 DRIVE SPECIFICATIONS
Unless otherwise noted, all specifications are measured under ambient conditions, at 25°C, and nominal power. For convenience, the
phrases the drive and this drive are used throughout this manual to indicate the following drive models:
The specification summaries listed in the following tables are for quick reference. For details on specification measurement or definition,
refer to the appropriate section of this manual.
Drive Specification ST500LT035 ST320LT033
Formatted capacity
Guaranteed sectors 976,773,168 625,142,448
Heads 2
Disks 1
Bytes per sector 512 (logical) / 4096 (physical)
Recording density 1885 Kb/in
Track density 366 Ktracks/in avg
Areal density 690 Gb/in2 avg
Spindle speed 5400 RPM
Sustained data transfer rate OD 100 MB/s max
I/O data-transfer rate 600 MB/s max
(1)
500 GB 320 GB
PIO modes 0–4
ATA data-transfer modes supported
Multiword DMA modes 0–2
Ultra DMA modes 0–6
Cache buffer 16 MB
Height 5.0 ± 0.20 mm (0.197 ± 0.008 in)
Width 69.85 ± 0.25 mm (2.750 ± 0.010 in)
Length 100.35 +0.20 / -0.25 mm (3.951 +0.008 / -0.010 in)
Weight (typical) <93g (0.205lb)
Average latency 5.6 ms
Startup current (typical) 5V (peak) 1.0 A
Voltage tolerance (including noise) 5V ± 5%
Operating temperature 0° to 60°C
Nonoperating temperature (Ambient) –40° to 70°C
Temperature gradient (max)
Relative humidity
20°C per hour max (operating)
35°C per hour max (nonoperating)
5% to 95% (operating)
5% to 95% (nonoperating)
Relative humidity gradient 30% per hour max
Wet bulb temperature (max)
37.7°C max (operating)
40.0°C max (nonoperating)
Altitude, operating –304.8 m to 3048 m (–1000 ft to 10,000+ ft)
Altitude, nonoperating
(below mean sea level, max)
–304.8 m to 12,192 m (–1000 ft to 40,000+ ft)
Operational Shock 400 Gs at 2 ms max
Non-Operational Shock 1000 Gs at 1 ms max
SEAGATE ULTRA MOBILE HDD PRODUCT MANUAL, REV. C 3

Drive Specification ST500LT035 ST320LT033
DRIVE SPECIFICATIONS
Vibration, operating
5–200 Hz: 2.0 Gs
201–500 Hz: 1.0 Gs
Vibration, nonoperating 5–500 Hz: 5.0 Gs
Nonrecoverable read errors 1 per 10
14
bits read
To determine the warranty for a specific drive, use a web browser to access the following
web page: http://www.seagate.com/support/warranty-and-replacements/
Warranty
From this page, click on “Check to see if the drive is under Warranty”. Users will be asked
to provide the drive serial number, model number (or part number) and country of pur-
chase. The system will display the warranty information for the drive.
Load-unload cycles 600,000 at 25°C, 50% rel. humidity
Supports Hotplug operation per the
Serial ATA Revision 2.6 specification
1. One GB equals one billion bytes when referring to hard drive capacity. Accessible capacity may vary depending on operating environment and
formatting.
Yes
2.1 FORMATTED CAPACITY
Model
500GB model
320GB model
Formatted Capacity
(1)
500 GB 976,773,168
320 GB 625,142,448
Guaranteed Sectors Bytes per Sector
512 (logical) / 4096 (physical)
1. One GB equals one billion bytes when referring to hard drive capacity. Accessible capacity may vary depending on operating environment and
formatting.
2.1.1 LBA mode
When addressing these drives in LBA mode, all blocks (sectors) are consecutively numbered from 0 to n–1,
guaranteed sectors as defined above.
Refer to Configuring and Mounting the Drive
support of drives with capacities over 137 GB.
2.2 PHYSICAL ORGANIZATION
Drive model Read/write heads Number of discs
ST500LT035
ST320LT033
on page 13 (words 60-61 and 100-103) for additional information about 48-bit addressing
2 1
where n is the number of
SEAGATE ULTRA MOBILE HDD PRODUCT MANUAL, REV. C 4
2.3 RECORDING AND INTERFACE TECHNOLOGY
Interface Serial A TA (SATA)
Recording method Perpendicular
Recording density 1885 Kb/in
Track density 366 ktracks/in avg
Areal density 690 Gb/in
2
avg
Spindle speed 5400 RPM +/- 0.2%
Sustained data transfer rate 100 MB/s max
I/O data-transfer rate 600 MB/s max
2.4 PHYSICAL CHARACTERISTICS
DRIVE SPECIFICATIONS
Height (max)
5.0 ± 0.20 mm (0.197 ± 0.008 in)
Width 69.85 ± 0.25 mm (2.750 ± 0.010 in)
All models
Length 100.35 +0.20 / -0.25 mm (3.951 +0.008 / -0.010 in)
Typical weight <93g (0.205lb)
Cache buffer 16 MB (16,192 KB)
2.5 SEEK TIME
Seek measurements are taken with nominal power at 25°C ambient temperature. All times are measured using drive diagnostics. The
specifications in the table below are defined as follows:
Track-to-track seek time is an average of all possible single-track seeks in both directions.
Average seek time is a true statistical random average of at least 5000 measurements of seeks between random tracks, less overhead.
Table 1 Typical seek times
Typical seek times (ms) Read
Track-to-track 1.5
Average 13.0
Average latency 5.6
These drives are designed to consistently meet the seek times represented in this manual. Physical
NOTE
seeks, regardless of mode (such as track-to-track and average), are expected to meet the noted values.
However, due to the manner in which these drives are formatted, benchmark tests that include
command overhead or measure logical seeks may produce results that vary from these specifications.
2.6 START/STOP TIMES
Table 2 Start/stop times
Typical seek times (ms) Typical
Max @ 25
Power-on to ready (sec) 3.0 3.2
Standby to ready (sec) 2.5 3.0
SEAGATE ULTRA MOBILE HDD PRODUCT MANUAL, REV. C 5
°C
DRIVE SPECIFICATIONS
2.7 POWER SPECIFICATIONS
The drive receives DC power (+5V) through a native SATA power connector (refer to Figure 2).
2.7.1 Power consumption
Power requirements for the drives are listed in the table below. Typical power measurements are based on an average of drives tested,
under nominal conditions, at 25°C ambient temperature. These power measurements are done with Interface Power Management
modes like HIPM and DIPM enabled.
Spinup power
Spinup power is measured from the time of power-on to the time that the drive spindle reaches operating speed.
Seek mode
During seek mode, the read/write actuator arm moves toward a specific position on the disk surface and does not execute a read or
write operation. Servo electronics are active. Seek mode power is measured based on three random seek operations every 100 ms.
This mode is not typical.
Read/write power and current
Read/write power is measured with the heads on track, based on three 63 sector read or write operations every 100 ms.
Idle mode power
Idle mode power is measured with the drive up to speed, with servo electronics active and with the heads in a random track location.
Standby mode
During standby mode, the drive accepts commands, but the drive is not spinning, and the servo and read/write electronics are in powerdown mode.
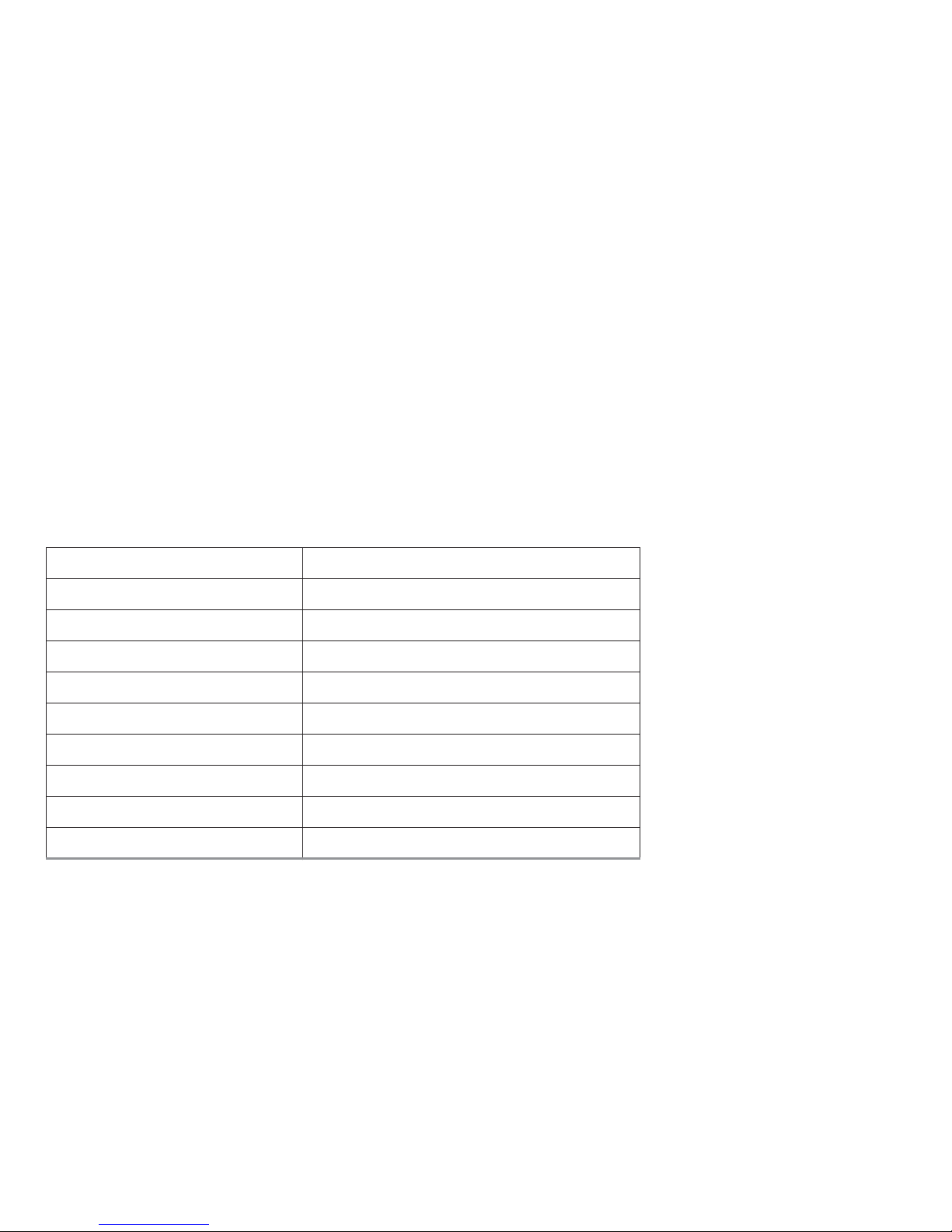
Table 3 Power dissipation
Power Dissipation +5V input average (25° C)
Spinup (max) 1.00A
Seek average 1.4W
Write average 1.70W
Read average 1.30W
Idle, performance
(1)
1.10W
Idle, active 0.66W
Idle, low power mode 0.47W
Standby
(2)
0.18W
Sleep 0.18W
1. During periods of drive idle, some offline activity may occur according to the S.M.A.R.T. specification,
which may increase acoustic and power to operational levels.
2. Standby power is measured at steady state (after 200ms from transition)
SEAGATE ULTRA MOBILE HDD PRODUCT MANUAL, REV. C 6
 Loading...
Loading...