

seagate ST31200N, ST31200ND, ST31200NC, ST3620N Product Manual

. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Hawk 1LP Family:
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ST31200N/ND/NC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ST3620N/NC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Product Manual, Volume 1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .


. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Hawk 1LP Family:
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ST31200N/ND/NC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ST3620N/NC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Product Manual, Volume 1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

© 1995 Seagate Technology, Inc. All rights reserved
Publication Number: 77767452, Revision D
March 1995
Seagate®, Seagate Technology®, and the Seagate logo are registered trademarks of Seagate Technology, Inc.
HawkTM, SeaFAXTM, SeaFoneTM, SeaTDDTM and SeaBOARDTM are trademarks of Seagate Technology, Inc.
Other product names are registered trademarks or trademarks of their own.
Seagate reserves the right to change, without notice, product offerings or specifications. No part of this
publication may be reproduced in any form without written permission of Seagate Technology, Inc.

Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. D v
_____________________________________________________________________________________
Revision Status Summary Sheet
Revision Authority Date Writer/Eng. Sheets affected
A Issue 2/10/94 D. Ashby v thru viii, 1 through 68
B PLD: 85297 5/18/94 Jim Bently/ v, 14 and 20
Larry Wilcox
C PLD: 85341 6/16/94 D. Ashby v, 2, 6, 11, 24, 27, 28, 50 thru 52.
D PLD: 85489 03/17/95 J. Rust, J. Bentley v, 22, 23, 66, 67 and 68.
Notice:
Product Manual 77767452 is Volume 1of a two Volume document with the SCSI interface information
in the Volume 2 SCSI Interface Product Manual, P/N 77738479.
If the SCSI Interface information is needed the Volume 2 Interface Manual should be ordered, P/N
77738479.

vi Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. A
______________________________________________________________________________________
Table of Contents
1.0 Scope.......................................................................................................................................... 1
2.0 Applicable standards and reference documentation.............................................................. 2
2.1 Standards ....................................................................................................................... 2
2.2 Applicable reference documents..................................................................................... 2
3.0 General description ................................................................................................................... 3
4.0 Features...................................................................................................................................... 5
4.1 Performance ................................................................................................................... 5
4.2 Reliability ........................................................................................................................ 5
4.3 Unformatted and formatted capacities ............................................................................ 6
4.4 Options (factory installed) ............................................................................................... 6
4.5 Optional accessories (user installed) .............................................................................. 6
4.6 Installation....................................................................................................................... 7
5.0 Performance characteristics..................................................................................................... 8
5.1 Internal drive characteristics (transparent to user) .......................................................... 8
5.2 SCSI Drive Seek and write performance characteristics (visible to user)........................ 8
5.2.1 Seek command execution time .......................................................................... 8
5.2.2 Format drive command execution time .............................................................. 9
5.2.3 Read data command execution time.................................................................. 9
5.2.4 Write data command execution time .................................................................. 9
5.3 Generalized performance characteristics........................................................................ 10
5.4 Start/stop time................................................................................................................. 11
5.5 Prefetch/multi segmented cache control ......................................................................... 12
5.5.1 Cache operation................................................................................................. 12
5.5.2 Prefetch operation.............................................................................................. 13
5.6 Caching write data .......................................................................................................... 14
5.7 Synchronized spindle operation ...................................................................................... 14
6.0 Reliability specifications ........................................................................................................... 17
6.1 Error rates....................................................................................................................... 17
6.1.1 Read errors........................................................................................................ 17
6.1.2 Environmental interference ................................................................................ 17
6.1.3 Write errors ........................................................................................................ 18
6.1.4 Seek errors ........................................................................................................ 18
6.2 Reliability and service...................................................................................................... 18
6.2.1 Mean time between failure ................................................................................. 18
6.2.2 Preventive maintenance..................................................................................... 18
6.2.3 Service life ......................................................................................................... 18
6.2.4 Service philosophy............................................................................................. 19
6.2.5 Installation.......................................................................................................... 19
6.2.6 Service tools ...................................................................................................... 19
6.2.7 Product warranty................................................................................................ 19
7.0 Physical/electrical specifications ............................................................................................. 20
7.1 AC power requirements .................................................................................................. 20
7.2 DC power requirements .................................................................................................. 20
7.2.1 Conducted noise immunity................................................................................. 20
7.2.2 Power sequencing ............................................................................................. 21
7.2.3 12 V - current profile .......................................................................................... 21

Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. A vii
______________________________________________________________________________________
7.3 Heat/power dissipation.................................................................................................... 22
7.4 Environmental limits........................................................................................................ 22
7.4.1 Temperature ...................................................................................................... 22
7.4.2 Relative humidity................................................................................................ 23
7.4.3 Effective altitude (sea level ref) .......................................................................... 24
7.4.4 Shock and vibration ........................................................................................... 24
7.4.5 Air cleanliness.................................................................................................... 26
7.5 Electromagnetic compatibility.......................................................................................... 26
7.5.1 Electromagnetic susceptibility ............................................................................ 26
7.6 Mechanical specifications ............................................................................................... 27
7.6.1 Drive orientation................................................................................................. 29
7.6.2 Cooling............................................................................................................... 29
7.6.3 Drive mounting................................................................................................... 29
8.0 Media characteristics ................................................................................................................ 30
8.1 Media description............................................................................................................ 30
9.0 Defect and error management .................................................................................................. 31
9.1 Drive internal defects/errors............................................................................................ 31
9.2 SCSI systems error considerations................................................................................. 31
10.0 Option/configuration headers................................................................................................... 32
10.1 Drive ID/Option select header ......................................................................................... 32
10.2 Synchronized spindles interface ..................................................................................... 35
10.2.1 Electrical description .......................................................................................... 35
10.3 Grounding....................................................................................................................... 37
11.0 Interface requirement ................................................................................................................ 38
11.1 General description......................................................................................................... 38
11.2 SCSI interface messages supported............................................................................... 38
11.3 SCSI interface commands supported ............................................................................. 39
11.3.1 Inquiry data ........................................................................................................ 41
11.3.2 Mode sense data ............................................................................................... 42
11.4 SCSI bus conditions and miscellaneous Features supported ......................................... 47
11.5 Synchronous data transfer.............................................................................................. 48
11.5.1 Synchronous data transfer periods supported.................................................... 48
11.5.2 REQ/ACK offset ................................................................................................. 48
11.6 Physical interface............................................................................................................ 48
11.6.1 DC cable and connector..................................................................................... 50
11.6.2 Physical characteristics...................................................................................... 50
11.6.3 Mating connector requirements.......................................................................... 51
11.6.4 Electrical description .......................................................................................... 58
11.7 Disc drive timing ............................................................................................................. 62

viii Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. A
______________________________________________________________________________________
12.0 Options....................................................................................................................................... 64
12.1 Front Panel ..................................................................................................................... 64
12.2 Single unit shipping ppack .............................................................................................. 64
13.0 Accessories ............................................................................................................................... 65
13.1 Front panel kit ................................................................................................................. 65
13.2 Installation manual .......................................................................................................... 65
14.0 Seagate support services ......................................................................................................... 66
Seagate peripheral family ...................................................................................................................... 67
Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. A 1
______________________________________________________________________________________
1.0 Scope
This Manual describes the Hawk 1LP family ST31200N/ND/NC and ST3620N/NC models members of the
Seagate Technology, Inc. Hawk 1LP Family Disc Drive. This high capacity, high performance member of the
Seagate 1 inch high 3.5 inch rigid disc family is a companion product to the ST11200 disc drive. Performance
information is given in Section 5. The Hawk 1LP Family drive interface is defined for functional compatibility
to be a subset of the Seagate SCSI Interface Manual 77738479, and the ANSI SCSI-2 and SCSI-3 standards.
The Hawk 1LP Family drives are classified as “Intelligent” peripherals. The Hawk 1LP Family provides Level
2 conformance (highest level) with the ANSI SCSI-1 standard. Details of the Hawk 1LP Family drive SCSI
implementation are provided in Section 11 of this Manual, (Vol. 1) and in the SCSI Interface Product Manual
P/N 77738479 (Vol. 2; Ver. 2).
From this point on in this Product Manual the reference to Hawk 1LP Family is referred to as “the drive” (unless
reference to individual models are necessary).
The drive printed circuit board is referred to as a PCB.
*
*50 pin/4 pin I/O and DC power connector shown. Models ST31200NC and
ST3620NC have a single 80 pin connector for both SCSI I/O and power.
Figure 1-1. Hawk 1LP family drive
SEAGATE

2 Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. C
_____________________________________________________________________________________
2.0 Applicable standards and reference documentation
The drive has been developed as a system peripheral to the highest standards of design and construction. The
drive depends upon its host equipment to provide adequate power and environment in order to achieve
optimum performance and compliance with applicable industry and governmental regulations. Special
attention must be given in the areas of safety, power distribution, shielding, audible noise control, and
temperature regulation. In particular, the drive must be securely mounted in order to guarantee the specified
performance characteristics.
2.1 Standards
The Hawk 1LP Family complies with Seagate standards as noted in the appropriate sections of this Manual
and the Seagate SCSI Interface Manual, P/N 77738479 (Vol. 2, Version 2).
The Hawk 1LP Family is a UL Recognized component per UL 1950 and a CSA Certified component per CAN/
CSA-C22.2 No. 950-M89. It also meets the requirements of DIN VDE 0805/05.90 and EN60950: 1988 (IEC
950).
The drive, as delivered, is designed for system integration and installation into a suitable enclosure prior to use.
As such the drive is supplied as a subassembly and is not subject to Subpart J of Part 15 of the FCC Rules
and Regulations nor the Radio Interference Regulations of the Canadian Department of Communications.
However, the unit has been tested using proper shielding and grounding and found to be compliant with Class
A limits of the FCC Rules and the Regulations of The Canadian Department of Communications.
The physical design characteristics of the drive serve to minimize radiation when installed in an enclosure that
provides reasonable shielding. As such, the drive is capable of meeting the Class B limits of the FCC Rules
and Regulations of the Canadian Department of Communication. However, it is the users responsibility to
assure that the drive meets the appropriate EMI requirements in their system. Shielded I/O cables may be
required if the enclosure does not provide adequate shielding. If the I/O cables are external to the enclosure,
shielded cables should be used, with the shields grounded to the enclosure and to the host controller.
2.2 Applicable reference documents
Hawk 1LP Family Installation Guide Seagate P/N 77767453
SCSI Interface Manual Seagate P/N 77738479
ANSI Small Computer System Interface (SCSI): Document Number ANSI3.131-1986 (X3T9/84.40 Rev. 1B)
(X3T9.2/82-2 Rev. 17B), X3T9.2/86-109 Revision 10H (SCSI-2) and X3T9.2-184 Rev. 4 (SCSI-3).
Package Test Specification Seagate P/N 30190-001 (under 100 lb.)
Package Test Specification Seagate P/N 30191-001 (over 100 lb.)
In case of conflict between this document and any referenced document, this document takes precedence.

Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. A 3
_____________________________________________________________________________________
3.0 General description
The drives are a member of a family of low cost, high performance, highly reliable, random access storage
devices designed to meet the needs of the OEM marketplace.
The drive records and recovers data on 3.7 inch (95 mm) fixed discs.
The drive supports the Small Computer System Interface (SCSI-2 and SCSI-3) as described in the ANSI
SCSI-1 and SCSI-2/SCSI-3 Interface Manuals to the extent described in this product Manual (Vol. 1), which
defines the product performance characteristics of the Hawk 1LP Family of drives, and the SCSI Interface
Product Manual P/N 77738479 (Vol. 2, Version 2) which describes the general interface characteristics of this
and other families of Seagate 3.5-inch drives.
The drive interface supports multiple initiators, disconnect/reconnect, self configuring host software and
automatic features that relieve the host from the necessity of knowing the physical characteristics of the targets
(logical block addressing is used).
The Head/Disc Assembly (HDA) is environmentally sealed at the factory. Air recirculates within the Head/Disc
(HDA) through a nonreplaceable filter to maintain a contamination free head/disc environment.
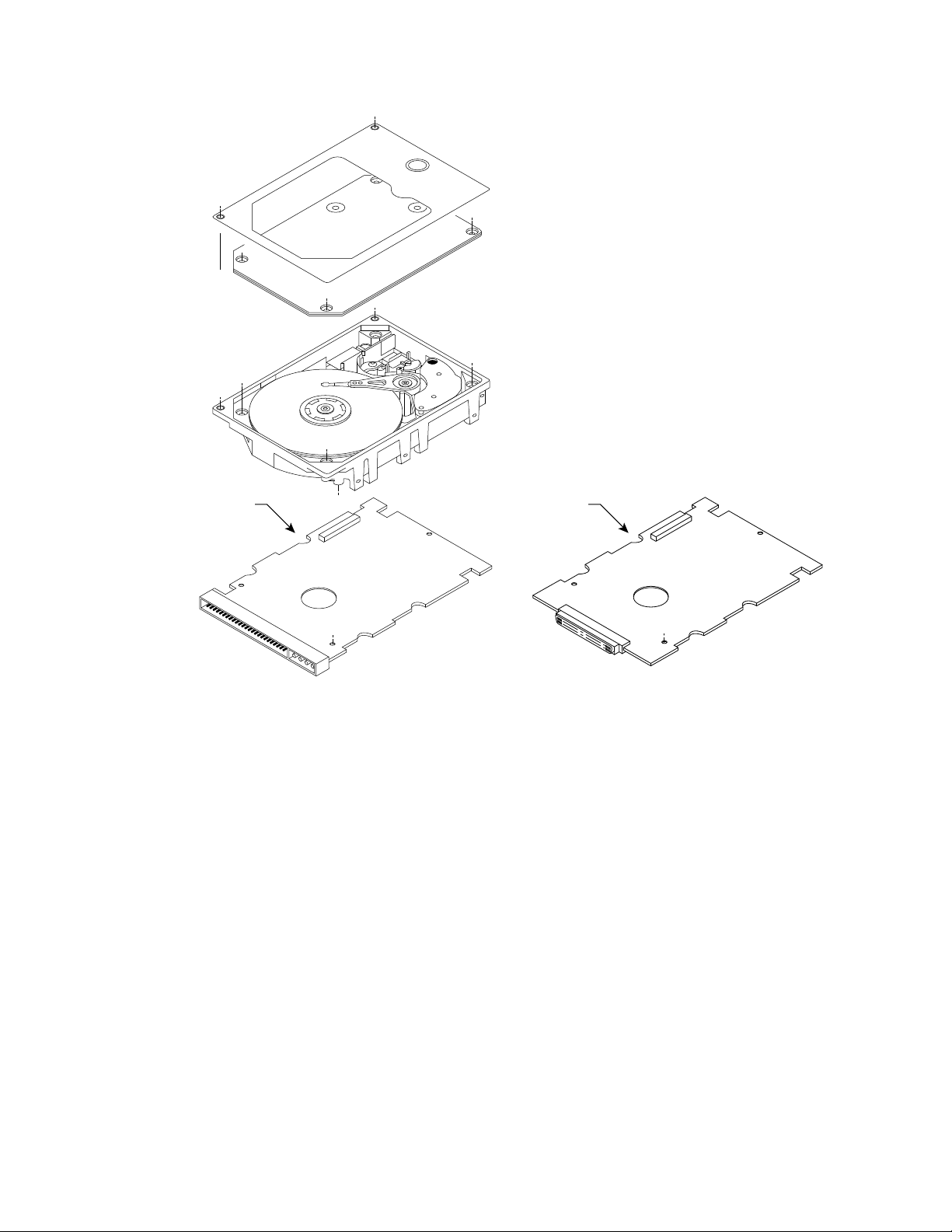
Refer to Figure 3.0-1 an exploded view of the drive. NEVER disassemble the Head/Disc Assembly (HDA). This
exploded view is for information only. Do not attempt to service items in the sealed environmental enclosure
(heads, media, actuator, etc.) as this requires special facilities. The drive contains no parts replaceable by the
user. The drive warranty is voided if the HDA is opened.
The Hawk 1LP Family drives use a dedicated landing zone at the innermost radius of the media to eliminate
the possibility of destroying or degrading data by landing in the data zone. The drive automatically goes to the
landing zone when the power is removed.
The Hawk 1LP Family drives incorporate an automatic shipping lock which prevents potential damage to the
heads and discs that result from movement during shipping and handling. The shipping lock is automatically
disengaged when power is applied to the drive and the head load process begins.
The Hawk 1LP Family drives decode track 0 location from the dedicated servo surface to eliminate mechanical
transducer adjustments and related reliability concerns.
The Hawk 1LP Family drives use a high performance actuator assembly that consists of a low inertia, balanced,
patented, straight arm design that provides excellent performance with minimum power dissipation.
4 Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev A
______________________________________________________________________________________
ST31200N/ND PCB ST31200NC PCB
Figure 3.0-1. Hawk 1LP family drive

Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. A 5
______________________________________________________________________________________
4.0 Features
The Hawk 1LP Family has the following standard features:
• Integrated SCSI Controller
• Single Ended and Differential SCSI drivers and receivers
• Asynchronous and Synchronous data transfer protocol
• Firmware downloadable via SCSI interface
• Selectable sector size from 256 to 4096 bytes/sector
• Programmable sector reallocation scheme
• Flawed sector reallocation at format time
• Programmable auto write and read reallocation
• Reallocation of defects on command (Post Format)
• 96 bit Reed-Solomon error correcting code
• Sealed Head/Disc Assembly
• No preventative maintenance or adjustment required
• Dedicated head landing zone
• Automatic shipping lock
• Automatic Thermal Compensation
• Patented Tri-phase Servo with embedded Grey Code Track Address to guarantee servo positioning.
• Self diagnostics performed at power on
• 1:1 Interleave
• Zoned Bit Recording (ZBR)
• Vertical, horizontal, or top down mounting
• Dynamic spindle brake
• Permanantly mounted terminators on model ST31200N, enabled by installation of a jumper plug.
• Synchronous spindle capability
• 256 Kbyte data buffer (optional 1 MB available)
4.1 Performance
• Programmable multi-segmentable cache buffer
• Automatic Adaptive Cache
• Zero Latency Reads
• 5411 RPM Spindle. Average latency = 5.54 ms
• Command Queuing of up to 64 commands
• Background processing of queue
• Supports start and stop commands
• Provides synchronized spindle capability
• Low audible noise for office environment
• Low power consumption
4.2 Reliability
• 500,000 hour MTBF
• Adaptive seek velocity. Improved seek performance
• LSI circuitry
• Balanced low mass rotary voice coil actuator
• 5 year warranty
6 Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. C
______________________________________________________________________________________
4.3 Unformatted and formatted capacities
Formatted capacity depends on the number of spare reallocation sectors reserved and the number of bytes
per sector. The following table shows some
Spare Sectors or Cylinders ST31200N/ND/NC ST3620N/NC
Reserved for reallocation MB MB
No Spares 1068.27 1145.7 553.1 584.3
Nine Spare Sectors Per Cylinder [2] 1055.28 1120.29 545.9 570.2
2 Spare Cylinders per Unit [3]
One Spare Sector per cyl. 1066.33 1142.39 551.4 581.2
2 Spare Cyl. per Unit [3]
Unformatted Capacity 1258.8 651.8
Notes.
[1] Bytes per sector. Sector size selectable at format time. Users having the necessary equipment may modify
the data block size before issuing a format command and obtain different formatted capacities than those
listed. User available capacity depends on spare reallocation scheme selected. See Mode Select
Command and Format Command in the SCSI Interface Product Manual P/N 77738479.
[2] All nine spare sectors are on one track.
[3] Spare cylinders are on the two inner tracks.
typical
formatted capacities.
512[1] 1024[1] 512[1] 1024[1]
The standard OEM model is as follows:
Formatted Data Block Size* Unformatted
512 Byte/Sector
ST31200N/ND/NC 1055.28 MB 1258.8 MB
ST3620N/NC 545.9 MB 651.8 MB
*Nine Spare Sectors per cylinder (all nine spare sectors are on one track), Two spare cylinders/unit.
4.4 Options (factory installed)
The capacities shown in paragraph 4.3 are available upon request. Other capacities can be ordered depending
on sparing scheme and sector size requested.
The following options are incorporated at the time of production. See Section 12.0.
• Front panel (green LED) - See Figure 3.0-1
• Installation Guide P/N 77767453
• 1 MB Data buffer
4.5 Optional accessories (user installed)
The following accessories are available. All kits may be installed in the field. See Section 13.0.
• Front Panel Kit (with green LED) - See Figure 3.0-1
• Single Unit shipping pack kit
• Installation Guide P/N 77767453
• Adapter Accessory Frame Kit P/N 75790701 (adapts 3.5-inch drive to fit in 5.25-inch drive mounting space)

Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. A 7
______________________________________________________________________________________
4.6 Installation
For option jumper locations and definitions refer to Figure 10.1-1. Drive default mode parameters are not
normally needed for installation. Refer to Section 11.3.2 for default mode parameters if they are needed.
• Ensure that the SCSI ID of the drive is not the same as the host adapter. Most host adapters use SCSI ID
7.
• If multiple devices are on the bus set the drive SCSI ID to one that is not presently used by other devices on
the bus.
• If the drive is the only device on the bus, attach it to the end of the SCSI bus cable. Permanently installed
terminators must be enabled on the drive for ST31200N/ST3620N and ST31200NC/ST3620NC models
using jumper plug TE. On ST31200ND models, external terminators must be provided by the user, systems
integrator or host equipment manufacturer.
• If the drive is attached to a bus that contains other devices, and the new drive is not attached to the end of
the bus, the Terminator Enable jumper (TE) should be removed from the new drive.
• Set all appropriate option jumpers for desired operation prior to power on. If jumpers are changed after power
has been applied, recycle the drive power to make the new settings effective.
• Installation instructions are provided by host system documentation or with any additionally purchased drive
installation software. If necessary see section 14.0 for Seagate support services telephone numbers.
• The Manufacturers installed labels must not be removed from the drive or covered with additional labels, as
they contain information required when servicing the product.
Formatting
• It is not necessary to low level format this drive. The drive is shipped from the factory low level formatted in
512 byte sectors.
• Reformat the drive if one of the following occurs.
- A different sector size is selected.
- A different spare sector allocation scheme is selected.

8 Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. A
______________________________________________________________________________________
5.0 Performance characteristics
5.1 Internal drive characteristics (transparent to user)
ST31200N/ND/NC ST3620N/NC
Drive Capacity 1258.8 651.8 MByte (UNF)
Read/Write Heads 9 5 (Max)
Bytes/Track 51803.0 48283 Bytes (Avg)
Bytes/Surface 139.8 130.4 Mbytes (UNF)
Tracks/Surface, Total 2700 2700 Tracks (user accessible)
Tracks/Inch 3000 3000 TPI
Servo Heads 1 1
Internal Data Rate 47.2 - 26.8 42.4 - 24.4 Mbits/sec (variable with zone)
Disc Rotational Speed 5411+ 0.5% 5411+ 0.5% r/min
Average Rotational Latency 5.54 5.54 ms
5.2 SCSI Seek, Read and Write performance characteristics (visible to user) [8]
Refer to Section 11.7 and to the SCSI-2 Interface Product Manual 77738479 for additional timing details.
5.2.1 Seek time
Drive Level Drive Level
ST31200N/ND/NC ST3620N/NC
Read Write Read Write
ms ms
Average - Typical*[3] 9.3 10.5 9.3 10.5
Max. [2] 11.0 12.5 11.0 12.5
Single Track - Typical [3] 1.2 1.7 1.2 1.7
Max. [2] 3.0 3.5 3.0 3.5
Full Stroke - Typical [3] 19.4 20.4 19.4 20.4
Max. [2] 22.9 23.9 22.9 23.9
Including Controller Overhead
(without disconnect) [1] [4]
Drive Level Drive Level
ST31200N/ND/NC ST3620N/NC
Read Write Read Write
ms ms
Average - Typical [3] 10.2 11.4 10.2 11.4
Max. [2] 11.9 13.4 11.9 13.4
Single Track - Typical [3] 2.1 2.5 2.1 2.5
Max. [2] 3.8 4.3 3.8 4.3
Full Stroke - Typical [3] 20.4 21.4 20.4 21.4
Max. [2] 23.9 24.9 23.9 24.9

Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. A 9
______________________________________________________________________________________
5.2.2 Format drive command execution time (minutes) [1]
Maximum (with verify) 25
Maximum (no verify) 17
*[ ] Notes are listed in Section 5.3.1.
5.2.3 Read data command execution time [4]
512 byte sector size, without disconnect and with read look ahead cache disabled).
Latency time is included.
a. From CDB reception to the drive request for the first data byte to be transferred to the Host
1. Typical (Zero Stroke Seek) 7.32 ms [3]*
2. Typical (Average Seek) 17.14 ms [3]
3. Maximum (Full Stroke Seek) 31.78 ms [2]
b. Single Sector Read and Transfer of data to Host (time from receipt of last byte of the CDB to the request
for a status byte transfer to Host) [7].
1. Typical (Zero Stroke Seek) 7.42 ms [3]
2. Typical (Average Seek) 17.24 ms [3]
3. Maximum (Full Stroke Seek) 31.84 ms [2]
5.2.4 Write data command execution time [4]
(512 byte sector size, without disconnect and with read look ahead disabled)
Latency time is included.
a. From CDB reception to the request for the first byte of write data from the Host.
1. Typical 1.49 ms 2. Maximum 1.61 ms
b. Single Sector Write and Data Transfer from Host [7] [6]
(Time from receipt of the last byte of the CDB to the request for a completion status transfer to the
Host)
1. Typical (Zero Stroke Seek) 7.72 ms [3]
2. Typical (Average Seek) 17.29 ms [3]
3. Maximum (Full Stroke Seek) 32.28 ms [2]
*[ ] All notes are listed in Section 5.3.1.

10 Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. A
______________________________________________________________________________________
5.3 Generalized performance characteristics
Minimum Sector Interleave 1 to 1
Data Buffer To/From Disc Media
Data transfer rate (< 1 sector) - 512 Byte Sector
Min. [4] 3.35 MByte/sec
Avg. [4] 4.59 MByte/sec
Max. [4] 5.35 MByte/sec
Data Buffer To/From Disc Media
Data Transfer Rate (< 1 Track) - 512 Byte Sector
Min. [4] 2.88 MByte/sec divided by (Interleave Factor)
Avg. [4] 3.94 MByte/sec divided by (Interleave Factor)
Max. [4] 4.6 MByte/sec divided by (Interleave Factor)
SCSI Interface Data
Transfer Rate (Asynchronous) [5]
N/NC family models ND family models
-Maximum Instantaneous 5.2** MBytes/sec 3.3 MBytes/sec
-Maximum Average 3.1 MBytes/sec 2.4 MBytes/sec
Sector Sizes 512 byte user data blocks (default)
Variable (256 to 4096 bytes per sector) in even number of bytes per sector. If n (number of
bytes per sector) is odd, then n-1 will be used.
Synchronous Transfer Rate
From 1.25 MBytes/sec to 10.0 MBytes/sec (See section 11.5.)
Read/Write consecutive sectors on a track YES
Flaw reallocation performance impact (For flaws reallocated at format Negligible
time using the spare sectors per track reallocation scheme.)*
Flaw reallocation performance impact (For flaws reallocated at format time Negligible
using the spare sectors per cylinder reallocation scheme.)*
*Simulated
Flaw reallocation performance impact (For flaws reallocated at format 35 ms (typical)
time using the spare tracks per volume reallocation scheme.)
Overhead time for head switch (512 byte sectors) 1 ms
Overhead time for one track cylinder switch <3 ms Typical
Average rotational latency 5.54 ms
*[ ] Notes listed in Section 5.3.1
** Assumes system ability to support 5.2 Mb/s and no cable loss.

Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. C 11
______________________________________________________________________________________
5.3.1 Notes for sections 5.2 and 5.3.
[1] Execution time measured from receipt of the last Byte of the Command Descriptor Block (CDB) to the
request for a Status Byte Transfer to the Initiator (excluding connect/disconnect).
[2] Maximum times are specified over the worst case conditions of temperature, voltage margins and drive
orientation. When comparing specified seek times, care should be taken to distinguish between typical
seek times and maximum seek times. The best comparison is obtained by system benchmark tests
conducted under identical conditions. Maximum times do not include error recovery.
[3] Typical Seek values are measured under nominal conditions of temperature, voltage, and horizontal
orientation as measured on a representative sample of drives.
[4] Assumes no errors and no sector has been relocated.
[5] Rate measured from the start of the first sector transfer to or from the Host.
[6] Assumes the Initiator immediately sends Write Data to the drive when requested.
[7] Command execution requires a data transfer phase (data to or from the disc media). Assumes the initiator
is instantly ready to send or receive the data when the drive generates first request for a data byte transfer,
and assumes an average data transfer rate between the drive and the Initiator as specified in section 5.3.
[8] All performance characteristics assume that automatic adaptive temperature compensation is not in
process when the SCSI command is received. A SCSI command being executed is not interrupted for
automatic adaptive temperature compensation. If adaptive thermal compensation is in process when a
SCSI command is received, the command is queued until the compensation for the specific head being
compensated completes. When compensation completes for the specific head being compensated, the
first queued SCSI command is executed. When execution of the first queued command is complete, the
drive continues the compensation for the remaining head(s). The above procedure continues until
compensation for all heads is completed, or until one minute has elapsed. If the compensation for all heads
is not complete in one minute the drive performs compensation for all of the remaining heads sequentially
without any interruption. The drive initiates an automatic adaptive temperature compensation cycle
approximately one minute after power-on, and approximately once every 10 minutes thereafter. Automatic
adaptive temperature compensation takes less than 0.1% of bus time. Automatic temperature compen-
sation also occurs at other times, but should be transparent to the user (e.g., during format, Rezero
Command, at spindle up, during read error recovery, and during Reassign Block functions). A Rezero
command can be used to reset the thermal compensation timer back to its start so that the host can know
when the next interruption for thermal compensation will occur.
5.4 Start/stop time
After DC power has been applied, all drive types except the 1.0 MB RAM Option becomes ready within 20
seconds (15 seconds typical) if the Motor Start option is disabled (i.e. the motor starts as soon as the power
has been applied). After DC power has been applied, the drive with 1.0 MB RAM option becomes ready within
35 seconds (25 seconds typical) if the Motor Start option is disabled (i.e. the motor starts as soon as the power
has been applied). During this time the drive responds to some commands over the SCSI interface* in less
than 3 seconds. Stop time is less than 20 seconds from removal of DC power.
If the Motor Start Option is enabled, the internal controller accepts the commands listed in the SCSI Interface
Product Manual* less than 3 seconds after DC power has been applied. After the Motor Start Command has
been received the drive becomes ready for normal operations within 13 seconds typically. The Motor Start
Command can also be used to command the drive to stop the spindle*.
There is no power control switch on the drive.
__________
*SCSI commands are described in the SCSI Interface Product Manual Volume 2, P/N 77738479

12 Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. A
_______________________________________________________________________________________
5.5 Prefetch/multi segmented cache control
The drive provides prefetch (read look-ahead) and multi-segmented cache control algorithms that in many
cases can enhance system performance. “Cache” as used herein refers to the drive buffer storage space when
it is used in “cache” operations. To select prefetch and cache features the host sends the Mode Select
command with the proper values in the applicable bytes in Mode Page 08h*. Prefetch and cache operation are
independent features from the standpoint that each is enabled and disabled independently via the Mode Select
command. However, in actual operation the prefetch feature overlaps cache operation somewhat as is noted
in sections 5.5.1 and 5.5.2.
All default cache and prefetch Mode parameter values (Mode Page 08h) for standard OEM versions of this drive
family are given in Tables 11.3.2-1 through 11.3.2-4.
5.5.1 Cache operation
In general, 240 Kbytes of the 256 Kbytes of physical buffer space in the drive can be used as storage space
for cache operations (984 Kbytes of 1 MB for drives having the optional 1 MB buffer). The buffer can be divided
into logical segments (Mode Select Page 08h, byte 13) from which data is read and to which data is written.
The drive maintains a table of logical block disk medium addresses of the data stored in each segment of the
buffer. If cache operation is enabled (RCD bit = 0 in Mode Page 08h, byte 2, bit 0. See SCSI Interface Product
Manual*), data requested by the host with a Read command is retrieved from the buffer (if it is there), before
any disc access is initiated. If cache operation is not enabled, the buffer (still segmented with required number
of segments) is still used, but only as circular buffer segments during disc medium read operations
(disregarding Prefetch operation for the moment). That is, the drive does not check in the buffer segments for
the requested read data, but goes directly to the medium to retrieve it. The retrieved data merely passes through
some buffer segment on the way to the host. All data transfers to the host are in accordance with “buffer-full”
ratio rules. See explanations associated with Mod page 02h (disconnect/reconnect control) in the SCSI
Interface Product Manual*.
The following is a simplified description of a read operation with cache operation enabled:
Case A - A Read command is received and the first logical block (LB) is already in cache:
1. Drive transfers to the initiator the first LB requested plus all subsequent contiguous LB’s that are already
in the cache. This data may be in multiple segments.
2. When the requested LB is reached that is not in any cache segment, the drive fetches it and any remaining
requested LB’s from the disc and puts them in a segment of the cache. The drive transfers the remaining
requested LB’s from the cache to the host in accordance with the disconnect/reconnect specification
mentioned above.
3. If the prefetch feature is enabled, refer to section 5.5.2 for operation from this point.
__________
*SCSI Interface Product Manual, 77738479.

Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. A 13
______________________________________________________________________________________
Case B - A Read command requests data, the first LB of which is not in any segment of the cache:
1. The drive fetches the requested LB’s from the disc and transfers them into a segment, and from there to
the host in accordance with the disconnect/reconnect specification referred to in case A.
2. If the prefetch feature is enabled, refer to section 5.5.2 for operation from this point.
Each buffer segment is actually a self-contained circular storage (wraparound occurs), the length of which is
an integer number of disc medium sectors. The wrap-around capability of the individual segments greatly
enhances the buffer’s overall performance as a cache storage, allowing a wide range of user selectable
configurations, which includes their use in the prefetch operation (if enabled), even when cache operation is
disabled (see section 5.5.2). For the ST31200N/ND and ST3620N/ND drives the
selected using the Mode Select command, but the size can not be directly selected. Size is selected only as
a by-product of selecting the segment number specification. The size in Kbytes of each segment is reported
by the Mode Sense command page 08h, bytes 14 and 15. If a size specification is sent by the host in a Mode
Select command (bytes 14 and 15) no new segment size is set up by the drive, and if the “STRICT” bit in Mode
page 00h (byte 2, bit 1) is set to one, the drive responds as it does for any attempt to change unchangeable
parameters (see SCSI I/O Product Manual*). The Hawk 1LP family of drives supports operation of any integer
number of segments from 1 to 16. Divide the 245,760 bytes (1,007,616 bytes for the optional 1 MB buffer) in
the buffer by the number of segments to get the size (in bytes) of each segment.
5.5.2 Prefetch operation
number
of segments may be
If the Prefetch feature is enabled, data in contiguous logical blocks on the disc immediately beyond that which
was requested by a Read command can be retrieved and stored in the buffer for immediate transfer from the
buffer to the host on subsequent Read commands that request those logical blocks (this is true even if “cache”
operation is disabled). Though the prefetch operation uses the buffer as a “cache”, finding the requested data
in the buffer is a prefetch “hit”, not a “cache” operation “hit”. Prefetch is enabled using Mode Select page 08h,
byte 12, bit 5 (Disable Read Ahead - DRA bit). DRA bit = 0 enables prefetch. Since data that is prefetched
replaces data already in some buffer segment(s), the host can limit the amount of prefetch data to optimize
system performance. The drive never prefetches more logical blocks than the number specified in the prefetch
logical blocks ceiling bytes (8 and 9) of Mode page 08h.
During a prefetch operation, the drive crosses a cylinder boundary to fetch more data only if the Discontinuity
(DISC) bit is set to one in bit 4 of byte 2 of Mode parameters page 08h.
The operation of the prefetch feature (when enabled by DRA = 0) can be modified to an adaptable prefetch
mode, wherein prefetch is disabled as long as two sequential read operations are not for contiguous blocks
of data. If two sequential Read operations request contiguous logical blocks of data, the drive automatically
enables the prefetch feature for the end of the second Read operation. As long as sequential Read operations
request contiguous LB’s of data, prefetch operation remains enabled.
If the host uses software interleave, there will not likely ever be two sequential Read operations for contiguous
LB’s, so the adaptive prefetch feature keeps prefetch disabled, even if the DRA bit enables it. Adaptive prefetch
is enabled when the IC (Initiator Control) bit (Mode page 08h, byte 2, bit 7) is set to 0 and when DRA = 0 (prefetch
enabled).
__________
*SCSI Interface Product Manual, P/N 77738479.

14 Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. B
______________________________________________________________________________________
5.6 Caching write data
Write caching is a write operation by the drive that makes use of a drive buffer storage area where the data
to be written to the medium is stored in one or more segments while the drive performs the write command.
Write caching is enabled along with read caching. For write caching, the same buffer space and segmentation
is used as set up for read functions. The buffer segmentation scheme is set up or changed independently,
having nothing to do with whether or not read and write caching is enabled or disabled. When a write command
is issued, the cache is first checked to see if any logical blocks that are to be written are already stored in the
cache from a previous read or write command. If there are, the respective cache segments are cleared. The
new data is cached for subsequent Read commands.
If the number of write data logical blocks exceeds the size of the segment being written into when the end of
the segment is reached, the data is written into the beginning of the same cache segment, overwriting the data
that was written there at the beginning of the operation. However, the drive does not overwrite data that has
not yet been written to the medium.
Tables 11.3.2-1 through 11.3.2-4 show Mode default settings for the Hawk 1LP family drives.
5.7 Synchronized spindle operation
The synchronized spindles operation allows several drives operating from the same host to operate their
spindles at the same synchronized rotational rate. Drives operating in a system in synchronized mode can
increase the system capacity and transfer rate in a cost effective manner.
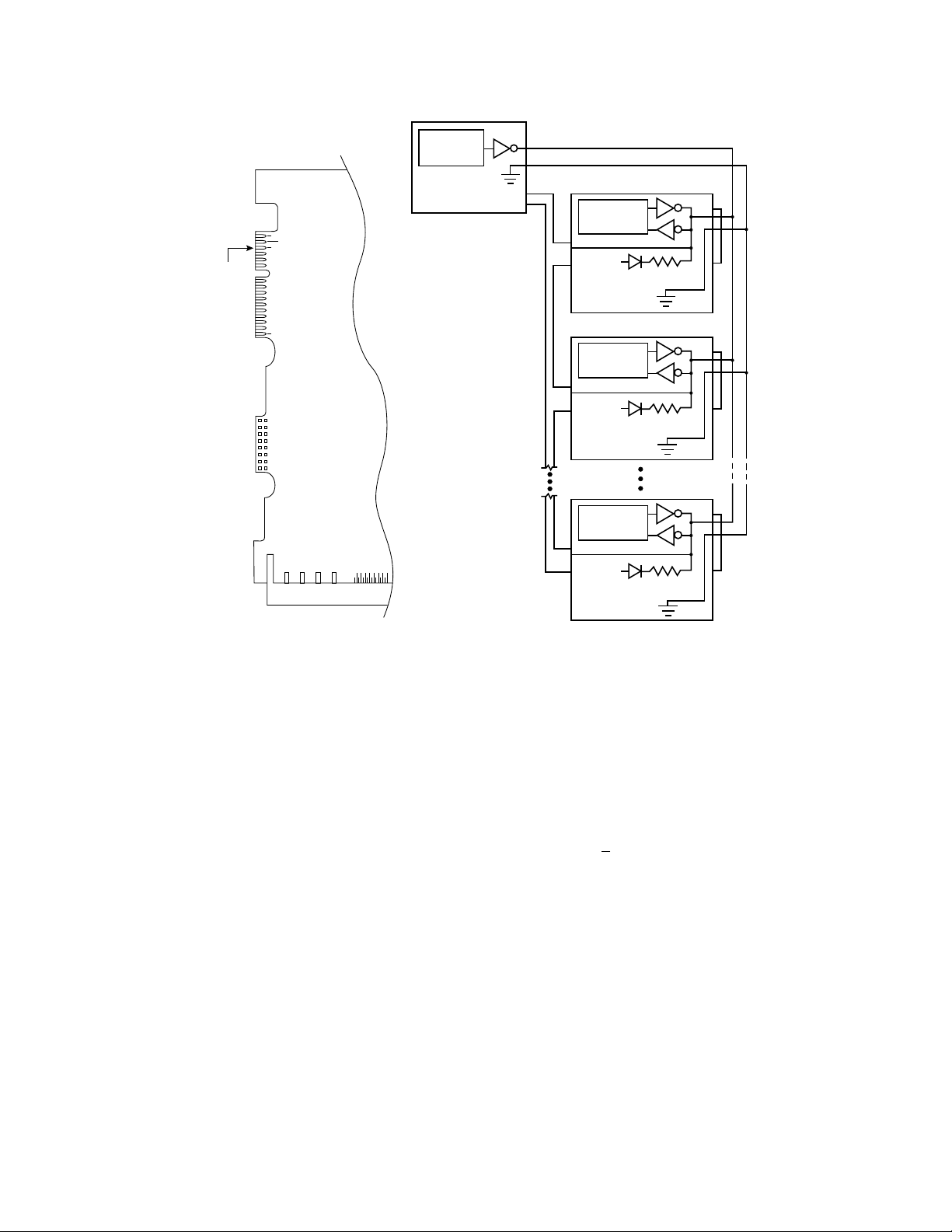
For Hawk 1LP models, the interface consists of a twisted pair cable that connects the drives in the synchronized
system in a daisy-chain configuration as shown in Figure 5.7-1. For "NC" models, the reference index signal
(SYNC) signal is on pin J1-37 of the 80-pin I/O connector. See Table 11.6.3-1c. Master/Slave operation is
autoarbitrated by each drive after head load. Alternatively, each drive in the system can be configured by the
host (using the Mode Select command Rigid Disc Drive Geometry page*) to operate in either the master or
slave mode.
After loading heads, a drive autoarbitrates for occurences of the Reference Index Signal (REFIND+). If the drive
detects no REFIND+ signal on the line, it assumes master status and begins generating the REFIND+ signal.
This signal will not be visible on the line until the last drive has powered up, since any unpowered drive holds
the line low.
Using Mode Select command, drives can be re-configured by the host to be master or slave any time after the
last drive has powered up. The master provides the reference signal to which all other drives phase lock,
including the master. The master can be a drive or the host computer. All the drives may be configured as
slaves, allowing the host to provide the REFIND+ signal. All drives default to the synchronized mode when
powered up, unless J6 pins 5 and 6 are jumpered.
Each drive can be configured (jumpered) for the non-synchronized mode in which it ignores any reference
signal that might be present. The connection of the synchronized reference signal to the host is required only
if the host is to provide the reference signal. If the host does not provide the reference signal, the host should
not be connected.
__________
*SCSI Interface Product Manual P/N 77738479
Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. A 15
_________________________________________________________________________________________
Bottom side of PCB
DLYIND+
Sync Interface
Master Sync
Source
2
4
6
Host
(or other drive)
J7
32
SCSI Bus
System
Interface
J2
J1
Spindle
Control
J1
37
[2]
+5V
Drive 1
Spindle
Control
J1
37
[2]
+5V
Drive 2
Spindle
Control
J1
37
[2]
+5V
Drive n
REFIND +
J6
6
5
R
T
R
T
R
T
[1]
J6
6
5
[1]
J6
6
5
[1]
Notes.
[1] Configuration Select Header (see Figure 10.1-1 and 10.2.1-1).
[2] This connection is only available on ST31200NC and ST3620NC models.
Figure 5.7-1. Synchronized drive interconnect diagram
The servo/read-write LSI on the master drive provides the reference signal (REFIND+). It is a 90.18 Hz crystal
generated signal. The signal is normally false/negated (nominal 0 V) and makes a transition to the true/asserted
(nominal +5 V) level to indicate the reference position during the revolution period. The trailing (falling) edge
of the reference signal is used by the master and the slave drives to phase lock their spindles. A maximum of
10 seconds is allowed for a slave to synchronize with the reference signal. The DLYIND+ signal (available on
J7-6. See Figure 5.7-1) of each synchronized drive shall occur 85.2 usec +20 usec after the REFIND+ signal.
The DLYIND+ signal (internal to drive) of each synchronized drive shall occur 85.2 usec ±20 usec after the
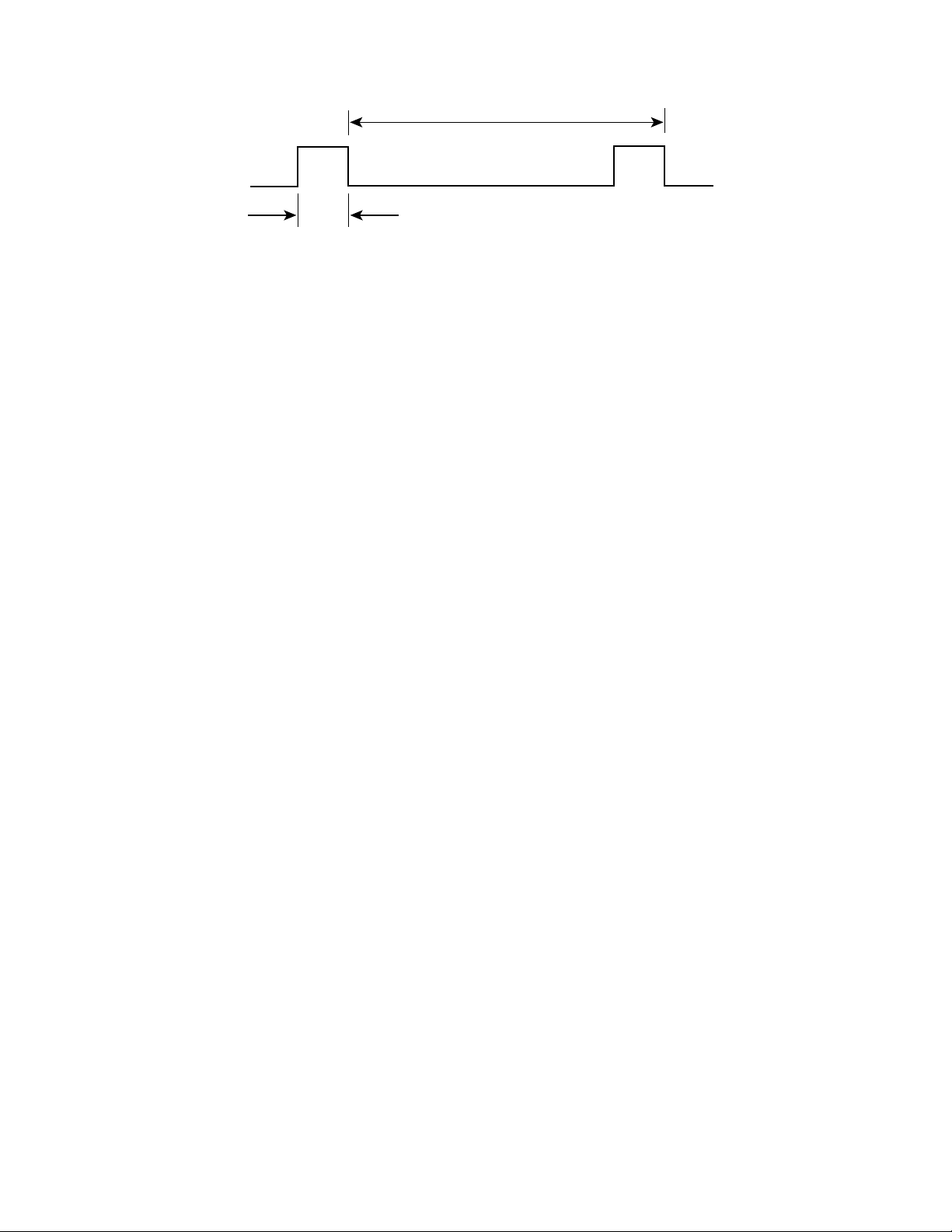
REFIND+ signal. Figure 5.7-2 shows the characteristics of the reference signal.
16 Product Manual - Hawk 1LP Family SCSI-2 (Volume 1), Rev. A
______________________________________________________________________________________
T
1
REFIND +
0
0.5 usec min.
500 usec max.
T = 0.0111 second (+/- 1.0% max); +/- 10 usec cycle to cycle variance;
Figure 5.7-2. Synchronized reference signal characteristics
SCSI Interface Factors
The Rotational Position Locking (RPL) field in byte 17 (bits 0 and 1) of the Rigid Disc Drive Geometry mode
parameters page (page 04h) is used for enabling/disabling spindle synchronization mode*. If the target fails
to achieve synchronization, it shall create a unit attention to all initiators. The sense key shall be set to UNIT
ATTENTION and the additional sense code set to RPL STATUS CHANGE. However, in automatic arbitration
mode, UNIT ATTENTION and the RPL STATUS CHANGE is not set.
If subsequent to achieving synchronization the target detects a change of synchronization:
1) and, if the logical unit is not presently executing an I/O process for the initiator, the target shall create a unit
attention condition. The sense key shall be set to UNIT ATTENTION and the additional sense code set
to RPL STATUS CHANGE.
2) and, if the logical unit is presently executing an I/O process and no other error occurs, the target shall return
CHECK CONDITION status. The sense key shall be set to RECOVERED ERROR if the target is able to
complete the I/O process or HARDWARE ERROR if the target is unable to complete the I/O process. The
additional sense code is set to RPL STATUS CHANGE.
The drive may be operated with a rotational skew when synchronized. The rotational skew is applied in the
retarded direction (lagging the synchronized spindle master control). A rotational offset of up to 255/256 of a
revolution lagging may be selected. The amount of offset is selected by using the Mode Select command, Rigid
Disc Drive Geometry page (page 04), byte 18*. The value in byte 18 (0 - FFh) is the numerator of a fractional
multiplier that has 256 as the denominator. For example, 40h selects 40h/FFh or 1/4 of a revolution lagging
skew, 80h selects 1/2 revolution lagging skew and etc. Since the drive supports all offset values from 0 to 255,
values sent by the initiator are not rounded off. The drive translation of the digital offset values to physical
rotational offsets will result in offset values whose phase error lies within the + or - 20 usec phase error with
respect to the supplied 90.18 Hz reference signal.
The drive does not have the capability to adjust the rotational offset value requested by the initiator to a physical
offset in the drive that corresponds in any way to sector boundaries or changes in ZBR zones. Such
correspondences or changes, if required, must be formulated by the initiator in order for it to calculate the value
of offset it sends to the drive.
__________
*SCSI Interface Product Manual P/N 77738479.
 Loading...
Loading...