

Product Manual
NL35 Series® 7200.2 Serial ATA
ST3500841NS
ST3500641NS
100390104
Rev . C
August 2007

Copyright © 2006-2007 Seagate Technology LLC. All rights reserved. Printed in USA
Publication number: 100390104, Rev. C
August 2007
Seagate, Seagate Technology and the Wave logo are registered trademarks of Seagate Technology LLC
in the United States and/or other countries. NL35 Series, SeaTools and SeaTDD are either trademarks or
registered trademarks of Seagate Technology LLC or one of its affiliated companies in the United States
and/or other countries. All other trademarks or registered trademarks are the property of their respective
owners.
One gigabyte, or GB, equals one billion bytes when referring to hard drive capacity. Accessible capacity
may vary depending on oper ating envi ronme nt and for matting. Seagate reserves the right to chan ge, wi thout notice, product offerings or specifications.

NL35 Series 7200.2 SATA Product Manual, Rev. C
i
Contents
1.0 Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 About the Serial ATA interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.0 Drive specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 Formatted capacity* . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1 LBA mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Default logical geometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.3 Recording and interface technology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.4 Physical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.5 Seek time. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.6 Start/stop times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.7 Power specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.7.1 Power consumption . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.7.2 Conducted noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.7.3 Voltage tolerance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.7.4 Power-management modes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.8 Environmental specifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.8.1 Ambient temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.8.2 Temperature gradient. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.8.3 Humidity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.8.4 Altitude. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.8.5 Shock. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.8.6 Vibration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.9 Acoustics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.10 Electromagnetic immunity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.11 Reliability. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.12 Agency certification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.12.1 Safety certification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.12.2 Electromagnetic compatibility. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.12.3 FCC verification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.13 Environmental protection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.13.1 European Union Restriction of Hazardous Substances (RoHS) . . . . . . . . . . . . 12
2.14 Corrosive environment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.0 Configuring and mounting the drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.1 Handling and static-discharge precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2 Configuring the drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3 Serial ATA cables and connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.4 Drive mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.0 Serial ATA (SATA) interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.1 Hot-Plug compatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2 Serial ATA device plug connector pin definitions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.3 Supported ATA commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.3.1 Identify Device command. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.3.2 Set Features command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3.3 S.M.A.R.T. commands. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.0 Seagate Technology support services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29

ii
NL35 Series 7200.2 SATA Product Manual, Rev. C

NL35 Series 7200.2 SATA Product Manual, Rev. C
iii
List of Figures
Figure 1. Typical 12V startup and operation current profile. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Figure 2. Jumper options. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Figure 3. Attaching SATA cabling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Figure 4. Mounting dimensions—top, side and end view . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17

NL35 Series 7200.2 SATA Product Manual, Rev. C
1
1.0 Introduction
This manual describes the functional, mechanical and interface specifications for the following Seagate
NL35 Series 7200.2 Serial ATA model drives:
NL35 Series 7200.2 Serial ATA
• ST3500841NS
• ST3500641NS
These drives provide the following key features:
• 7,200 RPM spindle speed.
• 8 Mbyte buffer on ST3500841NS drives
16 Mbyte buffer on ST3500641NS drives
• High instantaneous (burst) data-transfer rates.
• Tunneling Magnetoresistive (TMR) recording heads.
• State-of-the-art cache and on-the-fly error-correction algorithms.
• Native Command Queueing with command ordering to increase performance in demanding applications.
• Full-track multiple-sector transfer capability without local processor intervention.
• Quiet operation.
• 350 Gs nonoperating shock.
• SeaTools diagnostic software performs a drive self-test that eliminates unnecessary drive returns.
• Support for S.M.A.R.T. drive monitoring and reporting.
• Supports latching SATA cables and connectors.
• Supports hotplug operation per SATA II specification.
• Supports S.M.A.R.T. Command Transport (SCT) to provide enterprise-like features in an industry-accepted
transport mechanism. See Section 4.3.3.1 for additional information about SCT.
• Supports the Write Same command to allow large writes without host interface overhead.
• Supports Error Recovery Control to allow the host to put a soft time limit on read and write commands.
• One-Step Microcode Download which allows enterprise clients to download new drive code with a single
download command using the host download utility.
• Workload management features to manage drive temperature and activity. This optimizes drive reliability in
nearline environments with no user intervention required.

2
NL35 Series 7200.2 SATA Product Manual, Rev. C
1.1 About the Serial ATA interface
The Serial ATA interface provides several advantages over the traditional (parallel) ATA interface. The primary
advantages include:
• Easy installation and configuration with true plug-and-play connectivity. It is not necessary to set any jumpers or other configuration options.
• Thinner and more flexible cabling for improved enclosure airflow and ease of installation.
• Scalability to higher performance levels.
In addition, Serial ATA makes the transitio n from pa rallel ATA easy by providing legacy sof twar e suppo rt. S erial
ATA was designed to allow you to install a Serial ATA host adapter and Serial ATA disc drive in your current
system and expect all of your existing applications to work as normal.
The Serial ATA interface connects each disc drive in a point-to-point configuration with the Serial ATA host
adapter. There is no master/slave relationship with Serial ATA devices like there is with parallel ATA. If two
drives are attached on one Serial ATA host adapter, the host operating system views the two devices as if they
were both “masters” on two separate ports. This essentially means both drives behave as if they are Device 0
(master) devices.
Note. The host adapter may, optionally, emulate a master/slave environment to host software where two
devices on separate Serial ATA ports are represented to host software as a Device 0 (master) and
Device 1 (slave) accessed at the same set of host bus addresses. A host adapter that emulates a
master/slave environment manages two sets of shadow registers. This is not a typical Serial ATA
environment.
The Serial ATA host adapter and drive share the function of emulating parallel ATA device behavior to provide
backward compatibility with existing host systems and software. The Command and Control Block registers,
PIO and DMA data transfers, resets, and interrupts are all emulated.
The Serial ATA host adapter cont ai ns a set of registe rs that sha dow the conte nts of the traditional device r egisters, referred to as the Shadow Register Block. All Serial ATA devices behave like Device 0 devices. For additional information about how Serial ATA emulates parallel ATA, refer to the “Serial ATA: High Speed Serialized
AT Attachment” specification. The specification can be downloaded from www.serialata.org.
NL35 Series 7200.2 SATA Product Manual, Rev. C
3
2.0 Drive specifications
Unless otherwise noted, all specifications are measured under ambient conditions, at 25°C, and nominal
power. For convenience, the phrases the drive and this drive are used throughout this manual to indicate
ST3500841NS and ST3500641NS models.
2.1 Formatted ca pacity*
Model Formatted capacity Guaranteed sectors Bytes per sector
ST3500641NS and ST3500841NS 500 Gbytes 976,773,168 512
*One Gbyte equals one billion bytes when referring to hard drive capacity. Accessible capacity may vary
depending on operating environment and formatting.
2.1.1 LBA mode
When addressing these drives in LBA mode, all blocks (sectors) are consecutively numbered from 0 to n–1,
where n is the number of guaranteed sectors as defined above.
See Section 4.3.1, "Identify Device command" (words 60-61 and 100-103) for additional information about 48bit addressing support of drives with capacities over 137 Gbytes.
2.2 Default logi cal geometr y
Cylinders Read/write heads Sectors per track
16,383 16 63
LBA mode
When addressing these drives in LBA mode, all blocks (sectors) are consecutively numbered from 0 to n–1,
where n is the number of guaranteed sectors as defined above.
4
NL35 Series 7200.2 SATA Product Manual, Rev. C
2.3 Recording and int erface tech no l o gy
Interface Serial ATA (SATA)
Recording method 16/17 EPRML
Recording density BPI (bits/inch max) 790.7k
Track density TPI (tracks/inch avg) 134.4k
Areal density (Gbits/inch2 avg) 106.35
Spindle speed (RPM) (± 0.2%) 7,200
Internal data transfer rate (Mbits/sec max) 754
Sustained transfer rate (Mbytes/sec) 65
I/O data-transfer rate (Mbytes/sec max) 300
Interleave 1:1
Cache buffer 8 Mbytes (8,192 kbytes) on ST3500841NS drives
16 Mbytes (16,384 kbytes) on ST3500641NS drives.
2.4 Physical characteristics
Maximum he i g ht
(mm)
(inches)
Maximum wid th
(mm)
(inches)
Maximum length
(mm)
(inches)
Maximum wei g h t
(grams)
(pounds)
26.11
1.028
101.85
4.010
146.99
5.787
710
1.57
2.5 Seek time
Seek measurem ent s a re t ake n wi th nom inal po w er a t 25 °C amb ient temperature. All tim es a re m easu red using
drive diagnostics. The specifications in the table below are defined as follows:
• Track-to-track seek time is an average of all possible single-track seeks in both directions.
• Average seek time is a true statistical random average of at least 5,000 measurements of seeks between
random tracks, less overhead.
T yp ical seek times (msec) Read Write
Track-to-track 0.8 1.0
Average 8.0 9.0
Average latency: 4.16 4.16
Note. These drives ar e de si gned to consisten tl y me et t he se ek t imes r epr esente d in thi s manu al. P hysical
seeks, regardless of mode (such as track-to-track and average), are expected to meet the noted
values. However, due to the manner in which these drives are formatted, benchmark tests that
include command overhead or measure logical seeks may produce results that vary from these
specifications.
NL35 Series 7200.2 SATA Product Manual, Rev. C
5
2.6 Start/stop times
Power-on to Ready (sec) 10 (max)
St andby to Ready (sec) 10 (max)
Ready to spindle stop (sec) 12 (max)
2.7 Power specifications
The drive recei ve s D C po we r ( +5V or +12V ) t hrou gh a native SATA po wer connect or. See Figure 3 on p age 16.
2.7.1 Power consumption
Power requiremen ts fo r the drive s are listed i n the t able on pa ge 9. Typical powe r measu rem ent s are ba sed on
an average of drives tested, under nominal conditions, using 5.0V and 12.0V input voltage at 25°C ambient
temperature.
• Spinup power
Spinup power is measured from power-on to the time that the drive spindle reaches operating speed.
• Seek mode
During seek mode, the read/write actuator arm moves toward a specific position on the disc surface and
does not execute a read or write operation. Servo electronics are active. Seek mode power represents the
worst-case power consumption, using only random seeks with read or write latency time. This mode is not
typical and is provided for worst-case information.
• Read/write power and current
Read/write power is measured with the heads on track, based on a 16-sector write followed by a 32-msec
delay, then a 16-sector read followed by a 32-msec delay.
• Operating power and current
Operating powe r is me asure d usi ng 40 p ercen t ran dom seeks, 4 0 per cent r ead/ wri te m ode ( 1 write for each
10 reads) and 20 percent drive idle mode.
• Idle mode power
Idle mode power is measu red with the drive up to speed, with servo e le ctron ics acti ve and with the he ads i n
a random track location.
• Standby mode
During Standby mode, the drive accepts commands, but the drive is not spinning, and the servo and read/
write electronics are in power-down mode.
Table 1: DC power requirements
Power dissipation Average (25° C)
Spinup 2.9 Amps
Idle* 10.40 watts
Operating (40% r/w, 40% seek, 20% inop.) 13.00 watts
Seeking (random, 20% idle) 12.60 watts
St andby 0.80 watts
Sleep 0.80 watts
*During periods of drive idle, some offline activity may occur according to the S.M.A.R.T. specification, which may increase
acoustic and power to operational levels.
6
NL35 Series 7200.2 SATA Product Manual, Rev. C
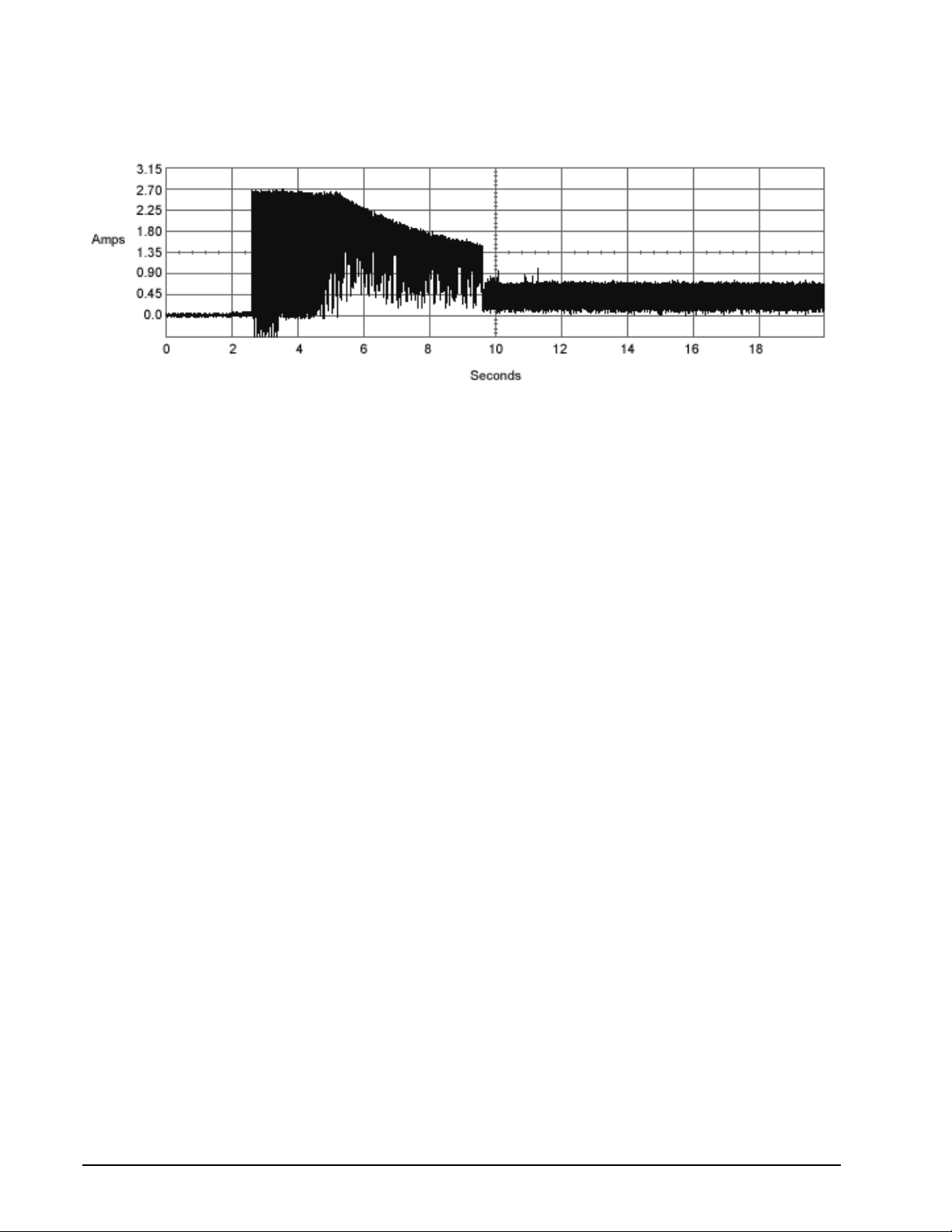
2.7.1.1 Typical current profile
Figure 1. Typical 12V startup and operation current profile
2.7.2 Conducted noise
Input noise ripple is measured at the host system power supply across an equivalent 80-ohm resistive load on
the +12 volt line or an equivalent 15-ohm resistive load on the +5 volt line.
• Using 12-volt power, the drive is expect ed to oper ate wit h a maxim um of 120 mV peak-to -pea k square- wave
injected noise at up to 10 MHz.
• Using 5-volt power, the drive is expected to operate with a maximum of 100 mV peak-to-peak square-wave
injected noise at up to 10 MHz.
Note. Equivalent resistance is calculated by dividing the nominal voltage by the typical RMS read/write
current.
2.7.3 Voltage tolerance
Voltage tolerance (including noise):
5V ± 5%
12V ± 10%
NL35 Series 7200.2 SATA Product Manual, Rev. C
7
2.7.4 Power-manag ement mo des
The drive provides programmable power management to provide greater energy efficiency. In most systems,
you can control power management through the system setup program. The drive features the following
power-management modes:
Power modes Heads Spindle Buffer
Active Tracking Rotating Enabled
Idle Tracking Rotating Enabled
Standby Parked Stopped Enabled
Sleep Parked Stopped Disabled
• Active mode
The drive is in Active mode during the read/write and seek operations.
• Idle mode
The buffer remains enabled, and the drive accepts all commands and returns to Active mode any time disc
access is necessary.
• Standby mode
The drive enters Standby mode when the host sends a Standby Immediate command. If the host has set
the standby timer, the drive can also enter Standby mode automatically after the drive has been inactive for
a specifiable length of time. The standby timer delay is established using a Standby or Idle command. In
Standby mode, the drive buffer is enabled, the heads are parked and the spindle is at rest. The drive
accepts all commands and returns to Active mode any time disc access is necessary.
• Sleep mode
The drive enters Sleep mode after receiving a Sleep command from the host. In Sleep mode, the drive
buffer is disabled, the heads are parked and the spindle is at rest. The drive leaves Sleep mode after it
receives a Hard Reset or Soft Reset from the host. After receiving a reset, the drive exits Sleep mode and
enters Standby mode with all current translation parameters intact.
• Idle and Standby timers
Each time the drive performs an Active function (read, write or seek), the standby timer is reinitialized and
begins counting down from its specified delay times to zero. If the standby timer reaches zero before any
drive activity is required, the drive makes a transition to Standby mode. In both Idle and Standby mode, the
drive accepts all commands and returns to Active mode when disc access is necessary.
 Loading...
Loading...