

Product Manual
DB35 Serial ATA
ST3400832SCE
ST3300831SCE
ST3250823SCE
ST3200826SCE
100362348
Rev . E
August 2007

Copyright © 2005-2007 Seagate Technology LLC. All rights reserved. Printed in U.S.A.
Publication number: 100362348, Rev. E
August 2007
Seagate, Seagate Technology and the Wave logo are registered trademarks of Seagate Technology LLC
in the United States and/or other countries. DB35 Series, SeaTools and SeaTDD are either trademarks or
registered trademarks of Seagate Technology LLC or one of its affiliated companies in the United States
and/or other countries. All other trademarks or registered trademarks are the property of their respective
owners.
One gigabyte, or GB, equals one billion bytes when referring to hard drive capacity. Accessible capacity
may vary depending on oper ating envi ronme nt and for matting. Seagate reserves the right to chan ge, wi thout notice, product offerings or specifications.

DB35 Serial ATA Product Manual, Rev. E
i
Contents
1.0 Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 About the Serial ATA interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.0 Drive specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 Specification summary table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Formatted capacity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2.1 LBA mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.3 Default logical geometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.4 Recording and interface technology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.5 Physical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.6 Seek time. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.7 Start/stop times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.8 Power specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.8.1 Power consumption . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.8.2 Conducted noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.8.3 Voltage tolerance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.8.4 Power-management modes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.9 Environmental specifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.9.1 Ambient temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.9.2 Temperature gradient. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.9.3 Humidity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.9.4 Altitude. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.9.5 Shock. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.9.6 Vibration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.10 Acoustics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.11 Electromagnetic immunity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.12 Reliability. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.13 Agency certification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.13.1 Safety certification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.13.2 Electromagnetic compatibility. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.13.3 FCC verification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.14 Environmental protection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.14.1 European Union Restriction of Hazardous Substances (RoHS) . . . . . . . . . . . . 14
2.15 Corrosive environment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.0 Configuring and mounting the drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.1 Handling and static-discharge precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Breather filter hole precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3 Configuring the drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.4 Serial ATA cables and connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.5 Drive mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.0 Serial ATA (SATA) interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.1 Hot-Plug compatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.2 Serial ATA device plug connector pin definitions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.3 Supported ATA commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.3.1 Identify Device command. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.3.2 Set Features command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.3.3 S.M.A.R.T. commands. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.0 Seagate Technology support services. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31

ii
DB35 Serial ATA Product Manual, Rev. E

DB35 Serial ATA Product Manual, Rev. E
iii
List of Figures
Figure 1. Typical 5V startup and operation current profile. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Figure 2. Typical 12V startup and operation current profile. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Figure 3. Breather filter hole location. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Figure 4. Serial ATA connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Figure 5. Attaching SATA cabling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Figure 6. Mounting dimensions—top, side and end view . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20

DB35 Serial ATA Product Manual, Rev. E
1
1.0 Introduction
This manual describes the functional, mechanical and interface specifications for the following Seagate
DB35 Serial ATA (SATA) model drives:
DB35 Serial ATA
• ST3400832SCE
• ST3300831SCE
• ST3250823SCE
• ST3200826SCE
These drives provide the following key features:
• Minimal acoustics for consumer storage usage profile.
• Bedroom quiet performance.
• Optimized power for consumer storage devices.
• Spinup current limited to a maximum of 2 amps.
• 7,200 RPM spindle speed.
• 8 Mbyte buffer on: ST3400832SCE, ST3300831SCE, ST3250823SCE, and ST3200826SCE models.
• High instantaneous (burst) data-transfer rates (up to 150 Mbytes per second).
• Tunneling Magnetoresistive (TMR) recording heads.
• State-of-the-art cache and on-the-fly error-correction algorithms.
• Native Command Queueing with command ordering to increase performance in demanding applications.
• Full-track multiple-sector transfer capability without local processor intervention.
• 300 Gs nonoperating shock.
• Support for S.M.A.R.T. drive monitoring and reporting.
• SeaTools diagnostic software performs a drive self-test that eliminates unnecessary drive returns.
• Supports latching SATA cables and connectors.

2
DB35 Serial ATA Product Manual, Rev. E
1.1 About the Serial A TA interface
The Serial ATA interface provides several advantages over the traditional (parallel) ATA interface. The primary
advantages include:
• Easy installation and configuration with true plug-and-play connectivity. It is not necessary to set any jumpers or other configuration options.
• Thinner and more flexible cabling for improved enclosure airflow and ease of installation.
• Scalability to higher performance levels.
In addition, Serial ATA makes the transi tio n from pa rall el ATA eas y by providing legacy software support. Serial
ATA was designed to allow you to install a Serial ATA host adapter and Serial ATA disc drive in your current
system and expect all of your existing applications to work as normal.
The Serial ATA interface connects each disc drive in a point-to-point configuration with the Serial ATA host
adapter. There is no master/slave relationship with Serial ATA devices like there is with parallel ATA. If two
drives are attached on one Serial ATA host adapter, the host operating system views the two devices as if they
were both “masters” on two separate ports. This essentially means both drives behave as if they are Device 0
(master) devices.
Note. The host adapter may, optionally, emulate a master/slave environment to host software where two
devices on separate Serial ATA ports are represented to host software as a Device 0 (master) and
Device 1 (slave) accessed at the same set of host bus addresses. A host adapter that emulates a
master/slave environment manages two sets of shadow registers. This is not a typical Serial ATA
environment.
The Serial ATA host adapter and drive share the function of emulating parallel ATA device behavior to provide
backward compatibility with existing host systems and software. The Command and Control Block registers,
PIO and DMA data transfers, resets, and interrupts are all emulated.
The Serial ATA host adapter cont ai ns a set of registe rs that sha dow the conte nts of the traditional device r egisters, referred to as the Shadow Register Block. All Serial ATA devices behave like Device 0 devices. For additional information about how Serial ATA emulates parallel ATA, refer to the “Serial ATA: High Speed Serialized
AT Attachment” specification. The specification can be downloaded from www.serialata.org.
DB35 Serial ATA Product Manual, Rev. E
3
2.0 Drive specifications
Unless otherwise noted, all specifications are measured under ambient conditions, at 25°C, and nominal
power. For convenience, the phrases the drive and this drive are used throughout this manual to indicate the
ST3400832SCE, ST3300831SCE, ST3250823SCE and ST3200826SCE models.
2.1 Specification summary table
The specifications listed in this table are for quick reference. For details on specification measurement or definition, see the appropriate section of this manual.
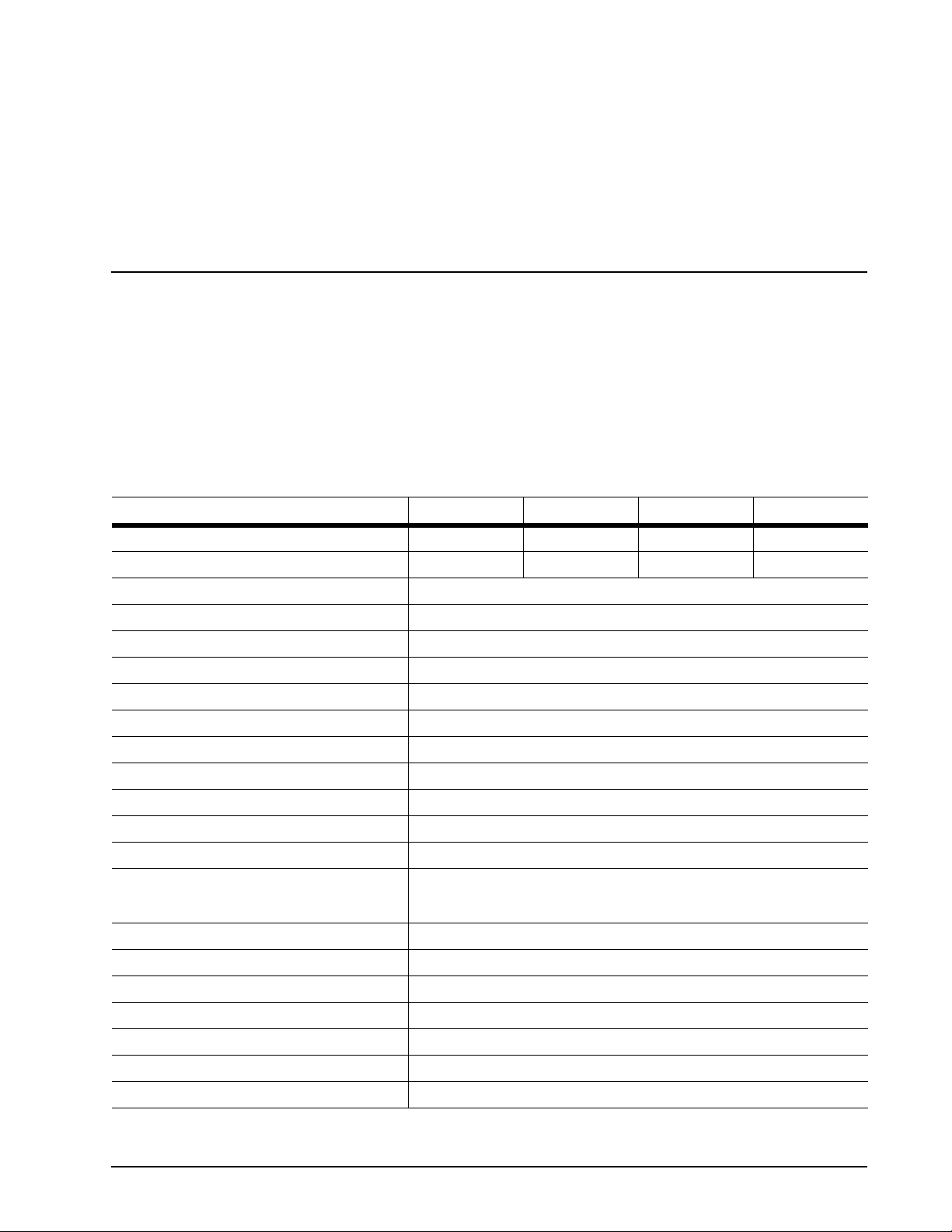
T a ble 1: Drive speci ficat ion s
Drive specification ST3400832SCE ST3300831SCE ST3250823SCE ST3200826SCE
Formatted Gbytes (512 bytes/sector)* 400 300 250 200
Guaranteed sectors 781,422,768 586,072,368 488,397,168 390,721,968
Bytes per sector 512
Default sectors per track 63
Default read/write heads 16
Default cylinders 16,383
Recording density in BPI (bits/inch max) 763,000
Track density TPI (tracks/inch avg) 120,000
Areal density (Mbits/inch2 avg) 91,560
Spindle speed (RPM) 7,200
Internal data transfer rate (Mbytes/sec max) 95
Sustained transfer rate OD (Mbytes/sec) 65
I/O data transfer rate (Mbytes/sec max) 150
ATA data-transfer modes supported PIO modes 0–4
SATA data-transfer modes supported 1.5 Gbits/sec
Cache buffer 8 Mbytes
Height (max) 26.11 mm (1.028 inches)
Width (max) 101.85 mm (4.010 inches)
Length (max) 146.99 mm (5.787 inches)
Weight (max) grams / lb. 635 / 1.39
Average latency (msec) 4.16
Multiword DMA modes 0–2
Ultra DMA modes 0–6
4
DB35 Serial ATA Product Manual, Rev. E
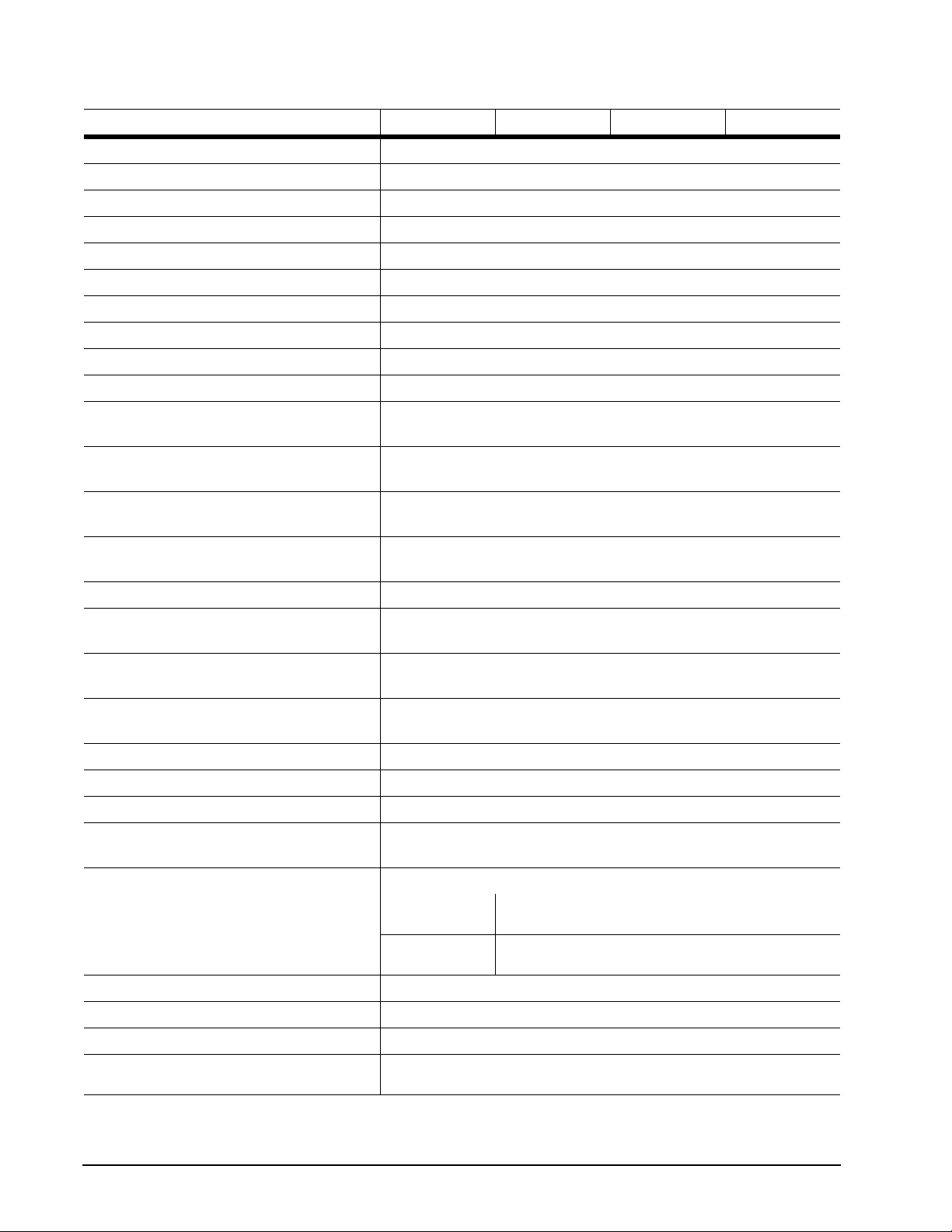
T a ble 1: Drive speci ficat ion s
Drive specification ST3400832SCE ST3300831SCE ST3250823SCE ST3200826SCE
Power-on to ready (typical) 17.0 sec
St andby to ready (typical) 16.0 sec
Track-to-t r a ck seek time ( ms e c typical) 0.8 (read), 1.0 (write)
Average seek (msec typical) 18 (read), 20 (write)
St artup current (typical) 12V (peak) 2.0 amps
Seek power (typical) 8.6 watts
Operating (Consumer Storage Profile) 7.2 watts
Idle mode (typical) 6.9 watts
St andby mode (typical) 0.80 watts
Sleep mode (typical) 0.80 watts
Voltage tolerance
(including noise)
Ambient temperature 0° to 60°C (operating)
Temperature gradient
(°C per hour max)
Relative humidity 5% to 90% (operating)
Relative humidity gradient 30% per hour max
5V ± 5%
12V ± 10%
–40° to 70°C (nonoperating)
20°C (operating)
30°C (nonoperating)
5% to 95% (nonoperating)
Wet bulb temperature
(°C max)
Altitude, operating –60.96 m to 3,048 m
Altitude, nonoperating
(meters below mean sea level, max)
Shock, operating (max at 2 msec) 63 Gs
Shock, nonoperating (max at 2 msec) 300 Gs
Vibration, operating 0.25 G acceleration
Vibration, nonoperating 0.25 G (5–22 Hz)
Drive acoustics, sound power (bels)
Idle** (bels) 2.6 (typical)
Operational (bels) 2.8 (typical)
Nonrecoverable read errors 1 per 10
Annualized Failure Rate (AFR) 0.34%
Service life 5 Years
Contact start-stop cycles
(25°C, 50% relative humidity)
37.7 (operating)
40.0 (nonoperating)
(–200 ft to 10,000+ ft)
–60.96 m to 12,192 m
(–200 ft to 40,000+ ft)
5.0 Gs (22–350 Hz)
2.8 (max)
3.0 (max)
14
bits read
50,000
2.4 (typical)
2.7 (max)
2.8 (typical)
3.0 (max)
DB35 Serial ATA Product Manual, Rev. E
5
T a ble 1: Drive speci ficat ion s
Drive specification ST3400832SCE ST3300831SCE ST3250823SCE ST3200826SCE
Supports Hotplug operation per SATA II
specification
*One Gbyte equals one billion bytes when referring to hard drive capacity. Accessible capacity may vary depending on operating environment
and formatting.
**Dur ing per io ds of driv e idle, some offline activity may occur accor di ng to the S.M.A.R. T . speci ficati on , whi ch may i ncrea se ac oustic an d
power to operational levels.
Yes
2.2 Formatted ca pacity
Model Formatted capacity* Guaranteed sectors Bytes per sector
ST3400832SCE 400 Gbytes 781,422,768 512
ST3300831SCE 300 Gbytes 586,072,368 512
ST3250823SCE 250 Gbytes 488,397,168 512
ST3200826SCE 200 Gbytes 390,721,968 512
*One Gbyte equals one billion bytes when referring to hard drive capacity. Accessible capacity may vary depending on operating environment
and formatting.
2.2.1 LBA mode
When addressing these drives in LBA mode, all blocks (sectors) are consecutively numbered from 0 to n–1,
where n is the number of guaranteed sectors as defined above.
See Section 4.3.1, "Identify Device command" (words 60-61 and 100-103) for additional information about 48bit addressing support of drives with capacities over 137 Gbytes.
2.3 Default logi cal geometr y
Cylinders Read/write heads Sectors per track
16,383 16 63
LBA mode
When addressing these drives in LBA mode, all blocks (sectors) are consecutively numbered from 0 to n–1,
where n is the number of guaranteed sectors as defined above.
6
DB35 Serial ATA Product Manual, Rev. E
2.4 Recording and interf ac e technology
Interface Serial ATA (SATA)
Recording method 16/17 EPRML
Recording density BPI (bits/inch max) 763,000
Track density TPI (tracks/inch avg) 120,000
Areal density (Mbits/inch2 avg) 91,560
Spindle speed (RPM) (± 0.2%) 7,200
Internal data transfer rate (Mbytes/sec max) 95
Sustained transfer rate OD (Mbytes/sec max) 65.0
I/O data-transfer rate (Mbytes/sec max) 150 (SATA 1.0)
Interleave 1:1
Cache buffer 8 Mbytes
2.5 Physical characteristics
Maximum he i g ht
(mm)
(inches)
Maximum wid th
(mm)
(inches)
Maximum length
(mm)
(inches)
Maximum wei g h t
(grams)
(pounds)
26.11
1.028
101.85
4.010 +/- 0.010
146.99
5.787
635
1.39
2.6 Seek time
Seek measurem ent s a re t ake n wi th nom inal po w er a t 25 °C amb ient temperature. All tim es a re m easu red using
drive diagnostics. The specifications in the table below are defined as follows:
• Track-to-track seek time is an average of all possible single-track seeks in both directions.
• Average seek time is a true statistical random average of at least 5,000 measurements of seeks between
random tracks, less overhead.
T yp ical seek times (msec) Read Write
Track-to-track 0.8 1.0
Average 18 20
Average latency: 4.16 4.16
Note. These drives ar e de si gned to consisten tl y me et t he se ek t imes r epr esente d in thi s manu al. P hysical
seeks, regardless of mode (such as track-to-track and average), are expected to meet or exceed
the noted values. However, due to the manner in which these drives are formatted, benchmark
tests that include command overhead or measure logical seeks may produce results that vary from
these specifications.
DB35 Serial ATA Product Manual, Rev. E
7
2.7 Start/stop times
Power-on to Ready (sec) 15.5 (max)
St andby to Ready (sec) 14.0 (max)
Ready to spindle stop (sec) 10 (max)
2.8 Power specifications
The drive receives DC power (+5V and +12V) through a native SATA power connector. See Figure 5 on
page 19.
2.8.1 Power consumption
Power requiremen ts fo r the drive s are listed i n the t able on pa ge 9. Typical power measurements are ba sed on
an average of drives tested, under nominal conditions, using 5.0V and 12.0V input voltage at 25°C ambient
temperature.
• Spinup power
Spinup power is measured from the time of power-on to the time that the drive spindle reaches operating
speed.
• Seek mode
During seek mode, the read/write actuator arm moves toward a specific position on the disc surface and
does not execute a read or write operation. Servo electronics are active. Seek mode power represents the
worst-case power consumption, using only random seeks with read or write latency time. This mode is not
typical and is provided for worst-case information.
• Operating power and current
Operating power is measured using a standrad Consumer Storage Profile.
• Idle mode power
Idle mode power is measu red with the drive up to speed, with servo e le ctron ics acti ve and with the he ads i n
a random track location.
• Standby mode
During Standby mode, the drive accepts commands, but the drive is not spinning, and the servo and read/
write electronics are in power-down mode.
8
DB35 Serial ATA Product Manual, Rev. E
Table 2: DC power requirements
Power dissipation (typical) Average (watts, 25° C) 5V typ amps 12V typ amps
Spinup — — 2.0 (peak)
Idle 6.9 0.353 0.519
Operating (Consumer Storage Profile) 7.2 0. 500 0.400
Seeking 8.6 0.318 0.585
Standby 1.4 0.265 0.006
Sleep 1.4 0.265 0.006
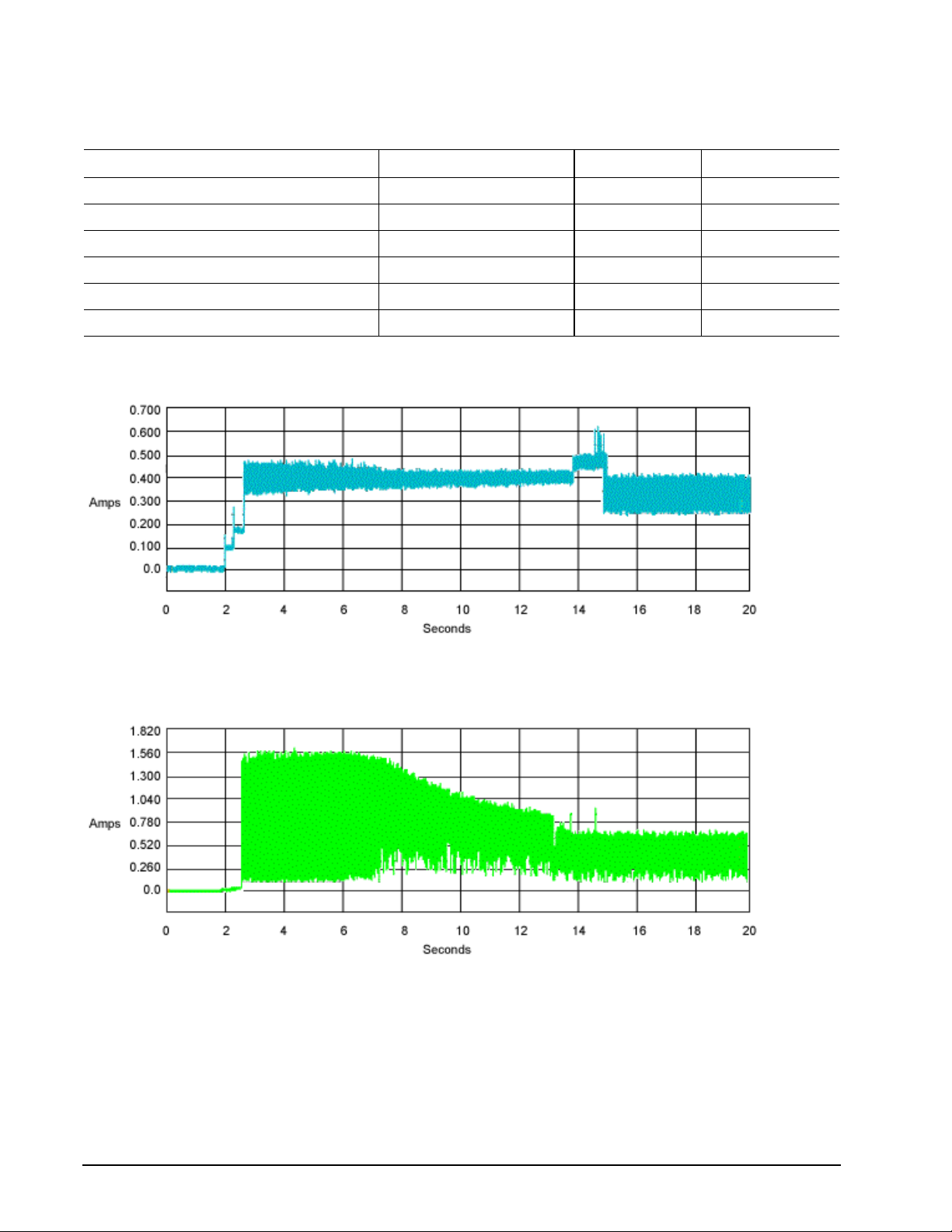
2.8.1.1 Typical current profiles
Figure 1. Typical 5V startup and operation current profile
Figure 2. Typical 12V startup and operation current profile

DB35 Serial ATA Product Manual, Rev. E
9
2.8.2 Conducted noise
Input noise ripple is measured at the host system power supply across an equivalent 80-ohm resistive load on
the +12 volt line or an equivalent 15-ohm resistive load on the +5 volt line.
• Using 12-volt power, the drive is expected to operate with a maximum of 120 mV pe ak-to -pea k square- wave
injected noise at up to 10 MHz.
• Using 5-volt power, the drive is expected to operate with a maximum of 100 mV peak-to-peak square-wave
injected noise at up to 10 MHz.
Note. Equivalent resistance is calculated by dividing the nominal voltage by the typical RMS read/write
current.
2.8.3 Voltage tolerance
Voltage tolerance (including noise):
5V ± 5%
12V ± 10%
2.8.4 Power-manag eme nt modes
The drive provides programmable power management to provide greater energy efficiency. In most systems,
you can control power management through the system setup program. The drive features the following
power-management modes:
Power modes Heads Spindle Buffer
Active Tracking Rotating Enabled
Idle Tracking Rotating Enabled
Standby Parked Stopped Enabled
Sleep Parked Stopped Disabled
• Active mode
The drive is in Active mode during the read/write and seek operations.
• Idle mode
The buffer remains enabled, and the drive accepts all commands and returns to Active mode any time disc
access is necessary.
• Standby mode
The drive enters Standby mode when the host sends a Standby Immediate command. If the host has set
the standby timer, the drive can also enter Standby mode automatically after the drive has been inactive for
a specifiable length of time. The standby timer delay is established using a Standby or Idle command. In
Standby mode, the drive buffer is enabled, the heads are parked and the spindle is at rest. The drive
accepts all commands and returns to Active mode any time disc access is necessary.
• Sleep mode
The drive enters Sleep mode after receiving a Sleep command from the host. In Sleep mode, the drive
buffer is disabled, the heads are parked and the spindle is at rest. The drive leaves Sleep mode after it
receives a Hard Reset or Soft Reset from the host. After receiving a reset, the drive exits Sleep mode and
enters Standby mode with all current translation parameters intact.
• Idle and Standby timers
Each time the drive performs an Active function (read, write or seek), the standby timer is reinitialized and
begins counting down from its specified delay times to zero. If the standby timer reaches zero before any

10
DB35 Serial ATA Product Manual, Rev. E
drive activity is required, the drive makes a transition to Standby mode. In both Idle and Standby mode, the
drive accepts all commands and returns to Active mode when disc access is necessary.
2.9 Environmen tal specifications
2.9.1 Ambient temperature
Ambient temperature is defined as the temperature of the environment immediately surrounding the drive.
Actual drive case temperature should not exceed 69°C (156°F) within the operating ambient conditions for
standard models. Recommended measurement locations are shown in Figure 6.
Above 1,000 feet (305 meters), the maximum temperature is derated linearly to 44°C (112°F) at 10,000 feet
(3,048 meters).
Operating: 0° to 60°C (32° to 140°F)
Nonoperating: –40° to 70°C (–40° to 158°F)
2.9.2 Temperature gradient
Operating: 20°C per hour (68°F per hour max), without condensation
Nonoperating: 30°C per hour (86°F per hour max)
2.9.3 Humidity
2.9.3.1 Relative humidity
Operating: 5% to 90% noncondensing (30% per hour max)
Nonoperating: 5% to 95% noncondensing (30% per hour max)
2.9.3.2 Wet bulb temperature
Operating: 37.7°C (99.9°F max)
Nonoperating: 40°C (104°F max)
2.9.4 Altitude
Operating: –60.96 m to 3,048 m (–200 ft. to 10,000+ ft.)
Nonoperating: –60.96 m to 12,192 m (–200 ft. to 40,000+ ft.)
2.9.5 Shock
All shock specifications assume that the drive is mounted securely with the input shock applied at the drive
mounting screws. Shock may be applied in the X, Y or Z axis.
2.9.5.1 Operating shock
These drives comply with the performance levels specified in this document when subjected to a maximum
operating shock of 63 Gs based on half-sine shock pulses of 2 msec. Shocks should not be repeated more
than two times per second.

DB35 Serial ATA Product Manual, Rev. E
11
2.9.5.2 Nonoperating shock
The nonoperating shock level that the drive can experience without incurring physical damage or degradation
in performance when subsequently put into operation is 30 0 Gs based o n a nonr epetitive hal f-sine shock pulse
of 2 msec duration.
2.9.6 Vibration
All vibration specifications assume that the drive is mounted securely with the input vibration applied at the
drive mounting screws. Vibration may be applied in the X, Y or Z axis.
2.9.6.1 Operating vibration
The maximum vibration levels that the drive may experience while meeting the performance standards specified in this document are specified below.
5–350 Hz 0.25 G acceleration (zero to peak)
2.9.6.2 Nonoperating vibration
The following table lists the maximum nonoperating vibration that the drive may experience without incurring
physical damage or degradation in performance when subsequently put into operation.
5–22 Hz 0.25 G
22–350 Hz 5.0 Gs
2.10 Acoustics
Drive acoustics are measured as overall A-weighted acoustic sound power levels (no pure tones). All measurements are consistent with ISO document 7779. Sound power measurements are taken under essentially
free-field conditions over a reflecting plane. For all tests, the drive is oriented with the cover facing upward.
Note. For seek mode tests, the drive is placed in seek mode only. The number of seeks per second is
defined by the following equation:
(Number of seeks per second = 0.4 / (average latency + average access time)
Table 3: Fluid Dynamic Bearing (FDB) motor acoustics
Acoust ic m ode
Models Idle Operational
ST3400832SCE 2.6 bels (typ)
ST3300831SCE
ST3250823SCE
ST3200826SCE
2.8 bels (max)
2.4 bels (typ)
2.7 bels (max)
2.8 bels (typ)
3.0 bels (max)
2.8 bels (typ)
3.0 bels (max)

12
DB35 Serial ATA Product Manual, Rev. E
2.11 Electromagnetic immunity
When properly installed in a representative host system, the drive operates without errors or degradation in
performance when subjected to the radio frequency (RF) environments defined in the following table:
T a bl e 4: Radio frequency enviro nm en t s
Performance
Test Description
Electrostatic discharge Contact, HCP, VCP: ± 4 kV; Air:
± 8 kV
Radiated RF immunity 80 to 1,000 MHz, 3 V/m,
80% AM with 1 kHz sine
900 MHz, 3 V/m, 50% pulse
modulation @ 200 Hz
Electrical fast transient ± 1 kV on AC mains, ± 0.5 k V on
external I/O
Surge immunity ± 1 kV differential, ± 2 kV com-
mon, AC mains
Conducted RF immunity 150 kHz to 80 MHz, 3 Vrms,
80% AM with 1 kHz sine
Voltage dips, interrupts 0% open, 5 seconds
0% short, 5 seconds
40%, 0.10 seconds
70%, 0.01 seconds
level
B EN 61000-4-2: 95
A EN 61000-4-3: 96
B EN 61000-4-4: 95
B EN 61000-4-5: 95
A EN 61000-4-6: 97
C
C
C
B
2.12 Reliability
Nonrecoverable read errors 1 per 1014 bits read, max
Annualized Failure Rate (AFR) 0.34% (nominal power, 25°C ambient temperature)
Contact start-stop cycles 50,000 cycles
Service Life 5 Years
Preventive maintenance None required
(at nominal voltage and temperature, with 60 cycles per hour and a 50% duty cycle)
Reference
standard
ENV 50204: 95
EN 61000-4-11: 94

DB35 Serial ATA Product Manual, Rev. E
13
2.13 Agency certifi cation
2.13.1 Safety certification
The drives are recognized in accordance with UL 1950 and CSA C22.2 (950) and meet all applicable sections
of IEC950 and EN 60950 as tested by TUV North America.
2.13.2 Electromagnetic compatibility
Hard drives that displ ay th e CE mark com pl y wit h the Euro pean Union (EU) requirements specified in the Elec tromagnetic Compatibility Directive (89/336/EEC). Testing is performed to the levels specified by the product
standards for Information Technology Equipment (ITE). Emission levels are defined by EN 55022, Class B and
the immunity levels are defined by EN 55024.
Seagate uses an inde pend ent laboratory to confirm compl ian ce with the EC directives specified i n t he pr evious
paragraph. Drives are teste d in representa tive end-user systems. Although CE-marked Seagate drives comply
with the directives when used in the test systems, we cannot guarantee that all systems will comply with the
directives. The drive is designed for operation inside a properly designed enclosure, with properly shielded I/O
cable (if necessary) and terminators on all unused I/O ports. Computer manufacturers and system integrators
should confirm EMC compliance and provide CE marking for their products.
Korean RRL
If these drives have the Korea Ministry of Information and Communication (MIC) logo, they comply with paragraph 1 of Article 11 of the Electromagnetic Compatibility control Regulation and meet the Electromagnetic
Compatibility (EMC) Framework requirements of the Radio Research Laboratory (RRL) Ministry of Information
and Communication Republic of Korea.
These drives have been tested and com ply with the Electr omag netic Inter fere nce/E lectro magn etic Susce ptibility (EMI/EMS) for Class B products. Drives ar e tested in a representative, end-user system by a Korean-recognized lab.
• EUT name (model numbers): ST3400832SCE, ST3300831SCE, ST3250823SCE and ST3200826SCE.
• Certificate numbers: ST3400832SCE E-H011-04-4534 (B)
ST3300831SCE E-H011-04-4534 (B)
ST3250823SCE E-H011-04-4533 (B)
ST3200826SCE E-H011-04-4533 (B)
• Trade name or applicant: Seagate Technology
• Manufacturing date: November 2004
• Manufacturer/nationality: Singapore and China

14
DB35 Serial ATA Product Manual, Rev. E
Australian C-Tick (N176)
If these models have the C-Tick marking, they comply with the Australia/New Zealand Standard AS/NZS3548
1995 and meet the Electromagnetic Compatibility (EMC) Framework requirements of the Australian Communication Authority (ACA).
2.13.3 FCC verification
These drives are intended to be cont ai ned solely w ithin a person al compute r or similar enclosu re (no t attached
as an external device ). As su ch, ea ch dr ive is co nsidere d to be a suba ssembly even when it is individually mar keted to the customer. As a subassembly, no Federal Communications Commission verification or certification
of the device is required.
Seagate Technology LLC has tested this device in enclosures as described above to ensure that the total
assembly (enclosure, disc drive, motherboard, power supply, etc.) does comply with the limits for a Class B
computing device, pursuant to Subpart J, Part 15 of the FCC rules. Operation with noncertified assemblies is
likely to result in interference to radio and television reception.
Radio and television interference. This equipment generates and uses radio frequency energy and if not
installed and used in strict accordance with the manufacturer’s instructions, may cause interference to radio
and television reception.
This equipment is designed to provide reasonable protection against such interference in a residential installation. However , there is no guarantee that interfer ence will not occur in a particular inst allation. If this equipm ent
does cause interference to radio or television, which can be determined by turning the equipment on and off,
you are encouraged to try one or more of the following corrective measures:
• Reorient the receiving antenna.
• Move the device to one side or the other of the radio or TV.
• Move the device farther away from the radio or TV.
• Plug the computer into a different outlet so that the receiver and computer are on different branch outlets.
If necessary, you should consult your dealer or an experienced radio/television technician for additional sug-
gestions. You may find helpful the following booklet prepared by the Federal Communications Commission:
How to Identify and Resolve Radio-Television Interference Problems. This booklet is available from the Superintendent of Documents, U.S. Government Printing Office, Washington, DC 20402. Refer to publication number 004-000-00345-4.
2.14 Environmental protection
Seagate designs its products to meet environmental protection requirements worldwide, including regulations
restricting certain chemica l subst ances .
2.14.1 European Union Restriction of Hazardous Substances (RoHS)
The European U nion Restr icti on of Hazard ous S ubst ance s (RoHS ) Dire cti ve re strict s the p resen ce of ch emic al
substances, including Lead (Pb), in electronic products effective July 2006. Although amendments to the
Euro-pean Union’s Restriction of Hazardous Substances (RoHS) Directive have not been finalized, to the best
of our knowledge the disc drives documented in this publication will comply with the final RoHS Directive
require-ments.
A number of parts and materials in Seagate products are procured from external suppliers. We rely on the
rep-resentat ions o f our sup pl iers reg ardi ng the pr esence of RoHS subst ances in these p arts and mate rials. Our
supplier contracts require compliance with our chemical substance restrictions, and our suppliers document
their compliance wi th our re quire ment s by providing material conte nt declar ations for al l par ts an d mater ial s for
the disc drives documented in this publication. Current supplier declarations include disclosure of the inclusion
of any RoHS-regulated substance in such parts or materials.

DB35 Serial ATA Product Manual, Rev. E
15
Seagate also has internal system s in place to en sure ongoing complian ce with the RoHS Directive and all laws
and regulations which restrict chemical content in electronic products. These systems include standard
operat-ing procedures that ensure that restricted substances are not utilized in our manufacturing operations,
labora-tory analytical validation testing, and an internal auditing process to ensure that all standard operating
procedures are complied with.
2.15 Corrosive environment
Seagate electronic drive components pass accelerated corrosion testing equivalent to 10 years exposure to
light industrial environments containing sulfurous gases, chlorine and nitric oxide, classes G and H per ASTM
B845. However, this accelerated testing cannot duplicate every potential application environment.
Users should use caution exposing any electronic components to uncontrolled chemical pollutants and corrosive chemicals as electr onic dr i ve com ponen t reliab ilit y can be af fecte d by th e i nst allation environment. The sil-
ver, copper, nickel and gold films used in Seagate products are especially sensitive to the presence of sulfide,
chloride, and nitr ate c ont ami na nt s. S ulfur is found to be the m ost dam aging . In ad di tion, e lectron i c comp onent s
should never be exposed to condensing water on the surface of the printed circuit board assembly (PCBA) or
exposed to an am bient rel at ive hum idity gr eate r th an 9 5%. Mat erial s used in cabin et fa bri cation , such as vulcanized rubber, that can outgas corrosive compounds should be minimized or eliminated. The useful life of any
electronic equipment may be extended by replacing materials near circuitry with sulfide-free alternatives.

16
DB35 Serial ATA Product Manual, Rev. E

DB35 Serial ATA Product Manual, Rev. E
17
3.0 Configuring and mounting the drive
This section contains the specifications and instructions for configuring and mounting the drive.
3.1 Handling and static-discharg e precautio ns
After unpacking, and before installation, the drive may be exposed to potential handling and electrostatic discharge (ESD) hazards. Observe the following standard handling and static-discharge precautions:
Caution:
• Keep the drive in the electrostatic discharge (ESG) bag until you are ready for installation.
• Before handling the drive, put on a grounded wrist strap, or ground yourself frequently by touching the metal
chassis of a computer that is plugg ed into a grounded outlet. Wear a grounded wrist strap through out the entire
installation procedure.
• Handle the drive by its edges or frame only.
• The drive is extremely fragile—handle it with care. Do not press down on the drive top cover.
• Always rest the drive on a padded, antistatic surface until you mount it in the computer.
• Do not touch the connector pins or the printed circuit board.
• Do not remove the factory-installed labels from the drive or cover them with additional labels. Removal voids
the warranty. Some factory-installed labels contain information needed to service the drive. Other labels are
used to seal out dirt and contamination.

18
DB35 Serial ATA Product Manual, Rev. E
3.2 Breather f ilter hole precaution s
(
This section contain s inf ormati on reg ardin g the pre c aution s to take with th e breat her fil ter hole in Se agate ha rd
disc drives. Take the proper precautions to ensure full functionality and to prevent possible damage to the
drive.
Breather hole
Do not cover or seal
this hole.
Figure 3. Breather filter hole location
Caution: Do not cover, seal, or insert any object into this hole.
This hole has two purposes:
• To allow condensation inside the hard disc to escape
• To allow air pressure inside the hard disc to equalize with ambient pressure
Note. If this hole is covered, sealed, or penetrated by any object, drive reliability may be compromised
and could lead to permanent damage--doing so voids the warranty.
3.3 Configuring the drive
Each drive on the Serial ATA interface connects in a point-to-point configuration with the Serial ATA host
adapter. There is no master/slave relationship because each drive is considered a master in a point-to-point
relationships. If two drives are attached on one Serial ATA host adapter, the host operating system views the
two devices as if they were both “masters” on two sep a rate ports. This means both drives b ehave as if they are
Device 0 (master) devices.
Serial ATA drives ar e des ig ned f or e asy inst al lation w ith no jump ers, terminators, or other settings. It is not necessary to set any jumpers on this drive for proper operation. The jumper block adjacent to the signal connector
is for factory use only.
SATA Signal
Jumper Block
factory use only)
Figure 4. Serial ATA connectors
SATA Power

DB35 Serial ATA Product Manual, Rev. E
19
3.4 Serial ATA cables and connectors
S
The Serial ATA interface cable consists of four conductors in two differential pairs, plus three ground connections. The cable size may be 30 to 26 AW G with a maximum length of one meter (39.37 inches). See Table 5
for connector pin definitions. Either end of the SATA signal cable can be attached to the drive or host.
For direct backplane connection, the drive connectors are inserted directly into the host receptacle. The drive
and the host receptacle incorporate features that enable the direct connection to be hot pluggable and blind
mateable.
For installations which require cables, you can connect the drive as illustrated in Figure 5.
Signal connector
Power connector
ignal cable
Power cable
Figure 5. At tac hing SATA cabling
Each cable is keyed to ensure correct orientation. DB35 Serial ATA drives support latching SATA connectors.

20
DB35 Serial ATA Product Manual, Rev. E
3.5 Drive mounting
(
Recommended
n
You can mount the drive in any orientation using four screws in the side-mounting holes or four screws in the
bottom-mounting holes. See Figure 6 on page 20 for drive mounting dimensions. Follow these important
mounting precautions when mounting the drive:
• Allow a minimum clearance of 0.030 inches (0.76 mm) around the entire perimeter of the drive for cooling.
• Use only 6-32 UNC mounting screws.
• The screws should be inserted no more than 0.150 inch (3.81 mm) into the bottom or side mounting holes.
• Do not overtighten the mounting screws (maximum torque: 6 inch-lb).
[1]
5.787 (146.9898) max.
.814
(20.676)
(2 x 95.25)
1.638
(41.605)
[1]
4.000
(101.6)
CLof drive
[1]
2 x 3.750
[1]
4.000
(101.6)
1.028 max
(26.111 max)
2 x 1.625
(2 x 41.28)
[1]
Notes:
Dimensions are shown in inches (mm).
[1] Dimensions per SFF-8301 specification
[1]
1.122
+ .020
(28.499
+ .508)
[1]
.138
3.505)
CLof conn. Datum B
2.00
(50.80)
case temperature
measurement locatio
.250 + .015
(6.35 + .381)
(3x both sides)
4.000
(101.6)
[1]
Figure 6. Mounting dimens ions—top, side and e nd v ie w
2 x 1.750
(2 x 44.45)
Recommended
case temperature
measurement location
[1]

DB35 Serial ATA Product Manual, Rev. E
21
4.0 Seria l ATA (SATA) interface
These drives use the industry-standard Serial ATA interface that supports FIS data transfers. It supports ATA
programmed input/output (PIO) modes 0–4; multiword DMA modes 0–2, and Ultra DMA modes 0–6.
For detailed information about the Serial ATA interface, refer to the “Serial ATA: High Speed Serialized AT
Attachment” specification.
4.1 Hot-Plug compatibility
DB35 Serial ATA drives incorporate connectors which enable you to hot plug these drives in accordance with
the Serial ATA II: Extension to Serial ATA 1.0a specification. This specification can be downloaded from
www.serialata.org.

22
DB35 Serial ATA Product Manual, Rev. E
4.2 Serial ATA device plug connector pin definitions
Table 5 summarizes the signals on the Serial ATA interface and power connectors..
Table 5: Serial ATA connector pin definitions
Segment Pin Function Definition
S1 Ground 2nd mate
S2 A+ Differential signal pair A from Phy
S3 A-
S4 Ground 2nd mate
S5 B- D ifferential signal pair B from Phy
S6 B+
Signal
S7 Ground 2nd mate
Key and spacing separate signal and power segments
P1 V
P2 V
P3 V
33
33
33
3.3V power
3.3V power
3.3V power, pre-charge, 2nd mate
P4 Ground 1s t ma te
P5 Ground 2nd mate
P6 Ground 2nd mate
Power
P7 V
P8 V
P9 V
5
5
5
5V power, pre-charge, 2nd mate
5V power
5V power
P10 Ground 2nd mate
P11 Ground or LED signal If grounded, drive does not use deferred spin
P12 Ground 1st ma te .
P13 V
P14 V
P15 V
12
12
12
12V power, pre-charge, 2nd mate
12V power
12V power
Notes:
1. All pins are in a single row, with a 1.27 mm (0.050”) pitch.
2. The comments on the mating sequence apply to the case of backplane blindmate connector only. In this
case, the mating sequences are:
• the ground pins P4 and P12.
• the pre-charge power pins and the other ground pins.
• the signal pins and the rest of the power pins.
3. There are three power pins for each voltage. One pin from each voltage is used for pre-charge when
installed in a blind-mate backplane configuration.
4. All used voltage pins (Vx) must be terminated.

DB35 Serial ATA Product Manual, Rev. E
23
4.3 Supported ATA commands
The following table lists Serial ATA standard commands that the drive supports. For a detailed description of
the ATA commands, refer to the Serial ATA: High Speed Serialized AT Attachment specification. See
“S.M.A.R.T. commands” on page 29.for details and subcommands used in the S.M.A.R.T. implementation.
Table 6: Supported ATA commands
Command nam e Command code (in hex)
Check Power Mode 98H or E5
Device Configuration Freeze Lock B1H / C1
Device Configuration Identify B1H / C2
Device Configuration Restore B1H / C0
Device Configuration Set B1H / C3
Device Rese t 08
Download Microcode 92
Execute Device Diagnostics 90
Flush Cache E7
Flush Cache Extended EA
Format Track 50
Identify Device EC
H
H
H
H
H
H
H
Idle 97H or E3
Idle Immediate 95H or E1
Initialize Device Parameters 91
Read Buffer E4
Read DMA C8
Read DMA Extended 25
Read DMA Without Retries C9
Read Log Ext 2F
Read Multiple C4
Read Multiple Extended 29
Read Native Max Address F8
Read Native Max Address Extended 27
Read Sectors 20
Read Sectors Extended 24
Read Sectors Without Retries 21
Read Verify Sectors 40
Read Verify Sectors Extended 42
Read Verify Sectors Without Retries 41
Recalibrate 10
Security Disable Password F6
Security Erase Prepare F3
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H

24
DB35 Serial ATA Product Manual, Rev. E
Command name Command code (in hex)
Security Erase Unit F4
Security Freeze F5
Security Set Password F1
Securit y Un l o ck F2
Seek 70
Set Features EF
Set Max Address F9
H
H
H
H
H
H
H
Note: Individual Set Max Address
commands are identified by the value
placed in the Set Max Features register as defined to the right.
Set Max Address Extended 37
Set Multiple Mode C6
H
H
Sleep 99H or E6
S.M.A.R.T. Disable Operations B0H / D9
S.M.A.R.T. Enable/Disable Autosave B0H / D2
S.M.A.R.T. Enable Operations B0H / D8
S.M.A.R.T. Execute Offline B0H / D4
S.M.A.R.T. Read Attribute Thresholds B0H / D1
S.M.A.R.T. Read Data B0H / D0
S.M.A.R.T. Read Log Sector B0H / D5
S.M.A.R.T. Return Status B0H / DA
S.M.A.R.T. Save Attribute Values B0H / D3
S.M.A.R.T. Write Log Sector B0H / D6
Standby 96H or E2
St andby Immediate 94H or E0
Write Buffer E8
Write DMA CA
Write DMA Extended 35
Write DMA FUA Extended CD
Write DMA Without Retries CB
Write Log Extended 3F
Write Multiple C5
Write Multiple Extended 39
Write Multiple FUA Extended CE
Write Sectors 30
Write Sectors Without Retries 31
Write Sectors Extended 34
H
H
H
H
H
H
H
H
H
H
H
H
Address:
Password:
Unlock:
Freeze Lock:
H
H
H
H
H
H
H
H
H
H
H
H
H
Lock:
00
01
02
03
04
H
H
H
H
H

DB35 Serial ATA Product Manual, Rev. E
25
4.3.1 Identify Device command
The Identify Device command (command code ECH) transfers information about the drive to the host following
power up. The data is organized as a single 512-byte block of data, whose contents are shown in Table 6 on
page 23. All reserved bits or words should be set to zero. Parameters listed with an “x” are drive-specific or
vary with the state of the drive. See Section 2.0 on page 3 for default parameter settings.
The following commands contain drive-specific features that may not be included in the Serial ATA specification.
Word Description Value
0
Configuration information:
• Bit 15: 0 = ATA; 1 = ATAPI
• Bit 7: removable media
0C5A
• Bit 6: removable controller
• Bit 0: reserved
1 Number of logical cylinders 16,383
2 ATA-reserved 0000
3 Number of logical heads 16
4 Retired 0000
5 Retired 0000
6 Number of logical sectors per logical track: 63 003F
7–9 Retired 0000
10–19 Serial number: (20 ASCII characters, 0000H = none) ASCII
20 Retired 0000
21 Retired 0400
22 Obsolete 0000
23–26 Firmware revision (8 ASCII character string, padded with blanks to end
x.xx
of string)
27–46 Drive model number: (40 ASCII characters, padded with blanks to end
of string)
ST3400832SCE
ST3300831SCE
ST3250823SCE
ST3200826SCE
47 (Bits 7–0) Maximum sectors per interrupt on Read multiple and Write
8010
multiple (16)
48 Reserved 0000
49 Standard Standby timer, IORDY supported and may be disabled 2F00
50 ATA-reserved 0000
51 PIO data-transfer cycle timing mode 0200
52 Retired 0200
53 Words 54–58, 64–70 and 88 are valid 0007
54 Number of current logical cylinders xxxx
55 Number of current logical heads xxxx
56 Number of current logical sectors per logical track xxxx
57–58 Current capacity in sectors xxxx
59 Number of sectors transferred during a Read Multiple or Write Multiple
command
xxxx
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H

26
DB35 Serial ATA Product Manual, Rev. E
Word Description Value
60–61 Total number of user-addressable LBA sectors available
(see Section 2.2 for related information)
*Note: The maximum value allowed in this field is: 0FFFFFFFh
(268,435,455 sectors, 137 Gbytes). Drives with capacities over 137
ST3400832SCE = 0FFFFFFFh*
ST3300831SCE = 0FFFFFFFh*
ST3250823SCE = 0FFFFFFFh*
ST3200826SCE = 0FFFFFFFh*
Gbytes will have 0FFFFFFFh in this field and the actual number of
user-addressable LBAs specified in words 100-103. This is required for
drives that support the 48-bit addressing feature.
62 Retired 0000
63 Multiword DMA active and modes supported (see note following this
xx07
table)
64 Advanced PIO modes supported (modes 3 and 4 supported) 0003
65 Minimum multiword DMA transfer cycle time per word (120 nsec) 0078
66 Recommended multiword DMA transfer cycle time per word (120 nsec) 0078
67 Minimum PIO cycle time without IORDY flow control (240 nsec) 00F0
68 Minimum PIO cycle time with IORDY flow control (120 nsec)
0078
69–74 ATA-reserved 0000
75 Queue depth 0000
76 Serial ATA capabilities xxxx
77 Reserved for future Serial ATA definition xxxx
78 Serial ATA features supported xxxx
79 Serial ATA features enabled xxxx
80 Major version number 003E
81 Minor version number 0000
82 Command sets supported 364B
83 Command sets supported 7C03
84 Command sets support extension 4003
85 Command sets enabled 30xx
86 Command sets enabled 0001
87 Command sets enable extension 4000
88 Ultra DMA support and current mode (see note following this table) xx3F
89 Security erase time 0000
90 Enhanced security erase time 0000
92 Master password revision code FFFE
93 Hardware reset value
xxxx
(see description following this table)
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
95–99 ATA-reserved 0000
100–103 Total number of user-addressable LBA sectors available (see Section
2.2 for related information). These words are required for drives that
support the 48-bit addressing feature. Maximum value:
0000FFFFFFFFFFFFh.
104–127 ATA-reserved 0000
128 Security status 0001
H
ST3400832SCE = 781,422,768
ST3300831SCE = 586,072,368
ST3250823SCE = 488,397,168
ST3200826SCE = 390,721,968
H
H

DB35 Serial ATA Product Manual, Rev. E
27
Word Description Value
129–159 Seagate-reserved xxxx
160–254 ATA-reserved 0000
255 Integrity word xxA5
H
H
H
Note. Advanced Power Management (APM) and Automatic Acoustic Management (AAM) features are not supported
Note. See the bit descriptions below for words 63, 88, and 93 of the Identify Drive data.
Description (if bit is set to 1)
Bit Word 63
0 Multiword DMA mode 0 is supported.
1 Multiword DMA mode 1 is supported.
2 Multiword DMA mode 2 is supported.
8 Multiword DMA mode 0 is currently active.
9 Multiword DMA mode 1 is currently active.
10 M ultiword DMA mode 2 is currently active.
Bit Word 88
0 Ultra DMA mode 0 is supported.
1 Ultra DMA mode 1 is supported.
2 Ultra DMA mode 2 is supported.
3 Ultra DMA mode 3 is supported.
4 Ultra DMA mode 4 is supported.
5 Ultra DMA mode 5 is supported.
6 Ultra DMA mode 6 is supported.
8 Ultra DMA mode 0 is currently active.
9 Ultra DMA mode 1 is currently active.
10 U ltra DMA mode 2 is currently active.
11 Ultra DMA mode 3 is currently active.
12 U ltra DMA mode 4 is currently active.
13 U ltra DMA mode 5 is currently active.
14 U ltra DMA mode 6 is currently active.

28
DB35 Serial ATA Product Manual, Rev. E
4.3.2 Set Features comman d
This command con trols the implement ation of var ious features that the dr iv e sup port s. When the drive receives
this command, it sets BSY, checks the contents of the Features register, clears BSY and generates an interrupt. If the value in the register does not represent a feature that the drive supports, the command is aborted.
Power-on default has the read look-ahead and write caching features enabled. The acceptable values for the
Features register are defined as follows:
T a ble 7: Set Feat ur es comman d value s
02
03
10
55
82
90
AA
F1
Enable write cache (default).
H
Set transfer mode (based on value in Sector Count register).
H
Sector Count register values:
00HSet PIO mode to default (PIO mode 2).
01HSet PIO mode to default and disable IORDY (PIO mode 2).
08HPIO mode 0
09HPIO mode 1
0AHPIO mode 2
0BHPIO mode 3
0CHPIO mode 4 (default)
20HMultiword DMA mode 0
21HMultiword DMA mode 1
22HMultiword DMA mode 2
40HUltra DMA mode 0
41HUltra DMA mode 1
42HUltra DMA mode 2
43HUltra DMA mode 3
44HUltra DMA mode 4
45HUltra DMA mode 5
46HUltra DMA mode 6
Enable use of SATA features
H
Disable read look-ahead (read cache) feature.
H
Disable write cache
H
Disable use of SATA features
H
Enable read look-ahead (read cache) feature (default).
H
Report full capacity available
H
Note. At power-on, or after a hardware or software reset, the default values of the features are as indi-
cated above.

DB35 Serial ATA Product Manual, Rev. E
29
4.3.3 S.M.A.R.T. commands
S.M.A.R.T. provides near-term failure prediction for disc drives. When S.M.A.R.T. is enabled, the drive monitors predetermined drive attributes that are susceptible to degradation over time. If self-monitoring determines
that a failure is likely, S.M.A.R.T. makes a status report available to the host. Not all failures are predictable.
S.M.A.R.T. predictability is limited to the attributes the drive can monitor. For more information on S.M.A.R.T.
commands and implementation, see the Draft ATA-5 Standard.
SeaTools diagnostic software activates a built-in drive self-test (DST S.M.A.R.T. command for D4H) that eliminates unnecessary drive returns. The diagnostic software ships with all new drives and is also available at:
http://seatools.seagate.com.
This drive is ship ped w ith S. M.A.R .T. features disab led. You must have a recent BIOS or soft ware pa ckage that
supports S.M.A.R.T. to enable this feature. The table below shows the S.M.A.R.T. command codes that the
drive uses.
T a ble 8: S.M.A. R. T. commands
Code in features register S.M.A.R.T. command
D0
D2
D3
D4
D5
D6
D8
D9
DA
H
H
H
H
H
H
H
H
H
S.M.A.R.T. Read Data
S.M.A.R.T. Enable/Disable Attribute Autosave
S.M.A.R.T. Save Attribute Values
S.M.A.R.T. Execute Off-line Immediate (runs DST)
S.M.A.R.T. Read Log Sector
S.M.A.R.T. Write Log Sector
S.M.A.R.T. Enable Operations
S.M.A.R.T. Disable Operations
S.M.A.R.T. Return Status
Note. If an appropriate code is not written to the Features Register, the command is aborted and 0x 04
(abort) is written to the Error register.

30
DB35 Serial ATA Product Manual, Rev. E

DB35 Serial ATA Product Manual, Rev. E
31
5.0 Seagate Technology support services
Internet
For information regarding Seagate products and services, visit www.seagate.com. Worldwide support is
available 24 hours daily by email for your questions.
Presales Support:
Presales@Seagate.com
T e chn i cal Supp or t:
DiscSupport@Seagate.com
Warranty Support:
http://www.seagate.com/support/service/index.html
mySeagate
my.seagate.com is the industry's first Web portal designed specifically for OEMs and distributors. It provides
self-service access to critical applications, personalized content and the tools that allow our partners to
manage their Seagate account functions. Submit pricing requests, orders and returns through a single,
password-protected Web interface-anytime, anywhere in the world.
spp.seagate.com
spp.seagate.com supports Seagate resellers with product information, program benefits and sales tools. You
may register for customiz e d communi cation s that ar e not ava ila ble on the web. The s e communi catio ns cont ai n
product launch, EOL, pricing, promotions and other channel-related information. To learn more about the
benefits or to register, go to spp.seagate.com, any time, from anywhere in the world.
Seagate Service Centers
Presales Support
Our Presales Support staff can help you determine which Seagate products are best suited for your specific
application or computer system, as well as product availability and compatibility.
Technical Support
Seagate technical support is available to assist you online at support.seagate.com or through one of our call
centers. Have your system configuration information and your “ST” model number available.
SeaTDD™ (+1-405-324-3655) is a telecommunications device for the deaf (TDD). You can send questions or
comments 24 hours daily and exchange messages with a technical support specialist during normal business
hours for the call center in your region.

32
DB35 Serial ATA Product Manual, Rev. E
Customer Service Operations
Warranty Service
Seagate offer s worldwi de custom er supp ort for Seagate pro duct s . Seagate distr i butors, OEM s and other direct
customers should contact their Seagate Customer Service Operations (CSO) representative for warrantyrelated issues. Resellers or end users of drive products should contact their place of purchase or Seagate
warranty service for assistance. Have your serial number and model or part number available.
Data Recove ry Services
Seagate offers data recovery services for all formats and all brands of storage media. Our data recovery
services labs are currently located throughout the world. . Additional information, including an online request
form and data loss prevention resources, is available at http://services.seagate.com/index.aspx
Authorized Service Centers
Seagate Service Centers are available on a global basis for the return of defective products. Contact your
customer support representative for the location nearest you.
USA/Canada/Latin America support services
For an extensive list of telephone numbers to technical support, presales and warranty service in USA/
Canada/Latin America, including business hours, go to the "Contact Us" page on www.seagate.com.
Global Customer Support
Presales, Technical, and Warranty Support
Call Center Toll-free Direct dial
USA, Canada,
and Mexico 1-800-SEAGATE +1-405-324-4700
Data Recovery Services
Call Center Toll-free Direct dial FAX
USA, Canada, 1-800-475-01435 +1-905-474-2162 1-800-475-0158
and Mexico +1-905-474-2459
Europe, the Middle East and Africa Support Services
For an extensive list of telephone numbers to technical support, presales and warranty service in Europe, the
Middle East and Africa, go to the "Contact Us" page on www.seagate.com.
Asia/Pacific Support Services
For an extensive list of telephone numbers to technical support, presales and warranty service in Asia/Pacific,
go to the "Contact Us" page on www.seagate.com.

DB35 Serial ATA Product Manual, Rev. E
33
Index
A
ACA 14
acceleration 11
acoustics 4, 11
Active 9
Active mode 9
actuator arm 7
AFR 12
Agency certification 13
altitude 10
Altitude, nonoperating 4
Altitude, operating 4
Ambient temperature 4, 10
ambient temperature 6, 7
Annualized Failure Rate (AFR) 4, 12
Areal density 3, 6
ATA commands 23
ATA data-transfer modes supported 3
Australia/New Zealand Standard AS/NZS3548 1995
14
Australian Communication Authority (ACA) 14
Australian C-Tick 14
Average latency 6
Average seek time 6
Average seek, read 4
B
bels 4
BPI 3
buffer 3, 6
Bytes per sector 3, 5
C
cables and connectors 19
Cache 3, 6
capacity 5
case temperature 10
CE mark 13
certification 13
Check Power Mode 23
chemical pollutants 15
chemical substances 14
Class B computing device 14
compatibility 13
Conducted noise 9
Conducted RF immunity 12
Configuring the drive 17
connectors 19
corrosive chemicals 15
Corrosive environmen t 15
CSA C22.2 (950) 13
current 4
cycles 12
Cylinders 5
cylinders 3
D
data-transfer rates 1
DC power 7
Default logical geometry 5
Default sectors per track 3
density 3
Device Configuration Freeze Lock 23
Device Configuration Identify 23
Device Configuration Restore 23
Device Configuration Set 23
Device Reset 23
dimensions 20
disc surface 7
displacement 11
Download Microcode 23
E
ead/write heads 3
Electrical fast transient 12
Electromagnetic compatibility 13
Electromagnetic Compatibility (EMC) 13
Electromagnetic Compatibility control Regulation 13
Electromagnetic Co mpati b ility Directive (8 9/336/EEC)
13
Electromagnetic immunity 12
Electrostatic discharge 12
electrostatic discharge (ESD) 17
EN 55022, Class B 13
EN 55024 13
EN 60950 13
Environmental protection 14
Environmental specifications 10
EPRML 6
error-correction algorithms 1
errors 4, 12
ESD 17
EU 13
European Union (EU) requirements 13
European Union Restriction of Hazardous Substanc-
es 14
Execute Device Diagnostics 23
F
FCC verification 14
features 1
Federal Communications Commission 14
Flush Cache 23
Flush Cache Extended 23
Format Track 23

34
DB35 Serial ATA Product Manual, Rev. E
Formatted capacity 5
Formatted Gbytes 3
G
Gbytes 5
geometry 5
gradient 4
Gs 11
Guaranteed sectors 3, 5
guaranteed sectors 5
H
Handling precautions 17
heads 3, 5
Height 3
humidity 4, 10
I
I/O data-transfer rate 3, 6
Identify Device 23
Identify Device command 25
Idle 8, 9, 23
Idle Immediate 23
Idle mode 4, 7, 9
IEC950 13
Information Technology Equipment (ITE) 13
Initialize Device Parameters 23
Input noise ripple 9
input voltage 7
Interface 6
interface 21
Interleave 6
Internal data transfer rate 3
Internal data-transfer rate 6
is 6
ISO document 7779 11
ITE 13
K
Korea Ministry of Information and Communication
(MIC) 13
Korean RRL 13
L
latency 3, 6
latency time 7
LBA mode 5
Length 3
logical geometry 5
M
maintenance 12
master/slave 2
maximum temperature 10
MIC 13
mounting 20
mounting screws 10
mounting the drive 17
N
noise 9
nominal power 6
Nonoperating shock 11
Nonoperating vibration 11
Nonrecoverable read errors 4, 12
O
Operating 8
Operating power 4, 7
Operating shock 10
Operating vibration 11
P
PCBA 15
Physical characteristics 6
point-to-point 2, 18
Power consumption 7
power consumption 7
Power dissipation 8
Power modes 9
Power specifications 7
Power-management modes 9
Power-on to Ready 7
Power-on to ready 4
precautions 17
printed circuit board 17
programmable power management 9
Q
quick reference 3
R
Radiated RF immunity 12
Radio and television interference 14
radio frequency (RF) 12
random seeks 7
Read Buffer 23
Read DMA 23
Read DMA Extended 23
Read DMA without Retries 23
read errors 4, 12
Read Log Ext 23
Read Multiple 23
Read Multiple Extended 23
Read Native Max Address 23

DB35 Serial ATA Product Manual, Rev. E
35
Read Native Max Address Extended 23
Read Sectors 23
Read Sectors Extended 23
Read Sectors Without Retries 23
Read Verify Sectors 23
Read Verify Sectors Extended 23
Read Verify Sectors Without Retries 23
read/write actuator arm 7
Read/write heads 5
Ready to spindle stop 7
Recalibrate 23
Recording density 3, 6
Recording method 6
Recording technology 6
Relative humidity 4
relative humidity 10
Reliability 12
RF 12
RMS read/write current 9
RoHS 14
RPM 3
RRL 13
S
S.M.A.R.T. Disable Operations 24
S.M.A.R.T. Enable/Disable Autosave 24
S.M.A.R.T. Enagle Operations 24
S.M.A.R.T. Execute Offline 24
S.M.A.R.T. implementation 23
S.M.A.R.T. Read Attribute Thresholds 24
S.M.A.R.T. Read Data 24
S.M.A.R.T. Read Log Sector 24
S.M.A.R.T. Return Status 24
S.M.A.R.T. Sav e Attribute Values 24
S.M.A.R.T. Write Log sector 24
Safety certification 13
SATA 6, 21
SATA data-transfer modes supported 3
screws 10
sector 5
sectors 5
Sectors per track 5
sectors per track 3
Security Disable Password 23
Security Erase Prepare 23
Security Erase Unit 24
Security Freeze 24
Security Set Password 24
Security Unlock 24
Seek 24
seek mode 7
Seek mode power 7
Seek power 4
Seek time 6
seek time 4
Seeking 8
Serial ATA 6
Seria l AT A ( S AT A) in te r f ac e 21
serial ATA ports 2
Servo electronics 7
servo electronics 7
Set Features 24
Set Max Addr ess 24
Set Max Address Extended 24
Set Multiple Mode 24
Shock 10
Shock, nonoperating 4
Shock, operating 4
single-track seeks 6
Sleep 8, 9, 24
Sleep mode 4, 9
sound power 4
Specification summary table 3
Spindle speed 3, 6
spindle stop 7
Spinup 8
Spinup power 7
Standby 8, 9, 24
Standby Immediate 24
Standby mode 4, 7, 9
standby timer 9
Standby to Ready 7
Standby to ready 4
Start/stop times 7
start-stop cycles 4, 12
Startup current 4
static-discharge 17
sulfide-free alternatives 15
support services 31
Surge immunity 12
T
technical support services 31
temperature 4, 6, 10
Temperature gradient 4
temperature gradient 10
timer 9
timers 9
TPI 3
Track density 3, 6
Track-to-track 6
Track-to-track seek time 4, 6
TUV North America 13
U
UL 1950 13
V
Vibration 11

36
DB35 Serial ATA Product Manual, Rev. E
Vibration, nonoperating 4
Vibration, operating 4
voltage 7
Voltage dips, interrupts 12
Voltage tolerance 4, 9
W
Weight 3
Wet bulb temperature 4
wet bulb temperature 10
Width 3
Write Buffer 24
Write DMA 24
Write DMA Extended 24
Write DMA FUA Extended 24
Write DMA Without Retries 24
Write Log Extended 24
Write Multiple 24
Write Multiple Extended 24
Write Multiple FUA Extended 24
Write Sectors 24
Write Sectors Extended 24
Write Sectors Without Retries 24


Seagate Technology LLC
920 Disc Drive, Scotts Valley, California 95066-4544, USA
Publication Number: 100362348, Rev. E, Printed in USA
 Loading...
Loading...