

Users Guide
Cheetah 10K.7 SCSI
ST3300007LW/LC
ST3146707LW/LC
ST373207LW/LC

Users Guide
Cheetah 10K.7 SCSI
ST3300007LW/LC
ST3146707LW/LC
ST373207LW/LC

©2003-2005, Seagate Technology LLC All rights reserved
Publication number: 100260915, Rev. D
July 2005
Seagate an d Seagate Technology are reg istered trademarks of Seagate Technology LLC.
Cheetah, SeaTools, SeaFONE, SeaBO ARD, SeaTDD, and the Wave logo are either registered trademarks or trademarks of Seagate Technology LLC. Other product names are registered trademarks or trademarks of their owners.
Seagate reserves the right to ch ange, witho ut notice, product offerings or spec ifications . No
part of this publication may be reproduc ed in any form w ithout wr itte n per mi ssio n of Seagate
Technology LLC.

Revision status summary sheet
Revision Date Sheets Affected
Rev. A 03/17/04 1/1, v-viii, 1-83.
Rev. B 09/22/04 Pages 9, 12, 1, 18, 25, 26, 28-34, 37, 43, 44, 58, and 87-90
Rev. C 05/05/05 Pages 11, 17, 27, 56, 60, 61, and 62.
Rev. D 07/21/05 Pages 4 and 12.


Contents
1.0 Scope. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2.0 Applicable standards and reference documentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 Standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1 Electromagnetic compatibility. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.2 Electromagnetic susceptibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Electromagnetic compliance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.3 Reference documents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.0 General description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1 Standard features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.2 Media characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.3 Performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.4 Reliability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.5 Formatted capacities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.5.1 Programmable drive capacity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.6 Factory installed accessories . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.7 Options (factory installed) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.8 Accessories (user installed). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4.0 Performance characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.1 Internal drive characteristics (transparent to user) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.2 SCSI performance characteristics (visible to user) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.2.1 Access time [4]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.2.2 Format command execution time (minutes) [1] . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.2.3 Generalized performance characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.3 Start/stop time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.4 Prefetch/multi-segmented cache control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.5 Cache operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.5.1 Caching write data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.5.2 Prefetch operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.5.3 Optimizing cache performance for desktop and server applications . . . . . . . . . 15
5.0 Reliability specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.1 Error rates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.1.1 Recoverable Errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.1.2 Unrecoverable Errors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.1.3 Seek errors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.2 Reliability and service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.2.1 Annualized Failure Rate (AFR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.2.2 Preventive maintenance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.2.3 Hot plugging Cheetah 10K.7 SCSI disc drives. . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.2.4 S.M.A.R.T. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
5.2.5 Thermal monitor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5.2.6 Drive Self Test (DST). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5.2.7 Product warranty . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
6.0 Physical/electrical specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
6.1 AC power requirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
6.2 DC power requirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
6.2.1 Conducted noise immunity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6.2.2 Power sequencing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6.2.3 12 V - Current profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6.3 Power dissipation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
6.4 Environmental limits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Cheetah 10K.7 SCSI Product Manual, Rev. D v

6.4.1 Temperature. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6.4.2 Relative humidity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6.4.3 Effective altitude (sea level) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6.4.4 Shock and vibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
6.4.5 Air cleanliness . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.4.6 Corrosive environment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.4.7 Acoustics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.4.8 Electromagnetic susceptibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.5 Mechanical specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
7.0 Defect and error management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
7.1 Drive internal defects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
7.2 Drive error recovery procedures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
7.3 SCSI systems errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7.4 Background Media Scan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
7.4.1 Media Pre-Scan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
8.0 Installation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
8.1 Drive ID/option select header. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
8.1.1 Notes for Figures 18, 19, and 20.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
8.1.2 Function description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
8.2 Drive orientation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.3 Cooling. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.4 Drive mounting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
8.5 Grounding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
9.0 Interface requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
9.1 General description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
9.2 SCSI interface messages supported . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
9.3 SCSI interface commands supported . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
9.3.1 Inquiry Vital Product data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
9.3.2 Mode Sense data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
9.4 SCSI bus conditions and miscellaneous features supported. . . . . . . . . . . . . . . . . . . . . . . 63
9.5 Synchronous data transfer. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
9.5.1 Synchronous data transfer periods supported . . . . . . . . . . . . . . . . . . . . . . . . . . 64
9.5.2 REQ/ACK offset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
9.6 Physical interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
9.6.1 DC cable and connector. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
9.6.2 SCSI interface physical description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
9.6.3 SCSI interface cable requirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
9.6.4 Mating connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
9.7 Electrical description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
9.7.1 Multimode—SE and LVD alternatives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
9.8 Terminator requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
9.9 Terminator power. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
9.10 Disc drive SCSI timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
9.11 Drive activity LED. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
10.0 Seagate Technology support services . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
vi Cheetah 10K.7 SCSI Product Manual, Rev. D

List of Figures
Figure 1. Cheetah 10K.7 SCSI family drive (ST3300007LC shown) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Figure 2. Typical ST3300007 drive +12 V current profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Figure 3. Typical ST3300007 drive +5 V current profile. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Figure 4. Typical ST3146707 drive +12 V current profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Figure 5. Typical ST3146707 drive +5 V current profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Figure 6. Typical ST373207 drive +12 V current profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Figure 7. Typical ST373207 drive +5 V current profile. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Figure 8. ST3300007 DC current and power vs. input/output operations per second (SE) . . . . . . . . . 31
Figure 9. ST3300007 DC current and power vs. input/output operations per second (LVD). . . . . . . . . 31
Figure 10. ST3146707 DC current and power vs. input/output operations per second (SE) . . . . . . . . . 32
Figure 11. ST3146707 DC current and power vs. input/output operations per second (LVD). . . . . . . . . 32
Figure 12. ST373207 DC current and power vs. input/output operations per second (SE) . . . . . . . . . . 33
Figure 13. ST373207 DC current and power vs. input/output operations per second (LVD). . . . . . . . . . 33
Figure 14. Location of the HDA temperature check point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Figure 15. Recommended mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Figure 16. LW mounting configuration dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Figure 17. LC mounting configuration dimensions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Figure 18. J6 jumper header . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Figure 19. J5 jumper header (on LW models only) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Figure 20. J2 option select header (on LW models only). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Figure 21. Air flow (suggested) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Figure 22. LW model drive physical interface (68-pin J1 SCSI I/O connector) . . . . . . . . . . . . . . . . . . . . 66
Figure 23. LC model drive physical interface (80-pin J1 SCSI I/O connector). . . . . . . . . . . . . . . . . . . . . 66
Figure 24. SCSI daisy chain interface cabling for LW drives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Figure 25. Nonshielded 68-pin SCSI device connector used on LW drives . . . . . . . . . . . . . . . . . . . . . . 72
Figure 26. Nonshielded 80-pin SCSI “SCA-2” connector, used on LC drives . . . . . . . . . . . . . . . . . . . . . 73
Figure 27. Typical SE-LVD alternative transmitter receiver circuits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Cheetah 10K.7 SCSI Product Manual, Rev. D vii

viii Cheetah 10K.7 SCSI Product Manual, Rev. D

1.0 Scope
This manual describes Seagate® Technology LLC, Cheetah® 10K.7 SCSI disc drives.
Cheetah 10K.7 SCSI driv es support the small computer system interface (SCSI) as described in the ANS I
SCSI SPI-3 interface specifications to the extent described in this manual. The SCSI Interface Product Manual
(part number 75789509) descr ibes general SCSI interface charac te rist ic s of thi s an d othe r famil ies of Se agate
drives.
From this point on in this product ma nual the reference to Chee tah 10K.7 SCSI models is referr ed to as “the
drive” unless references to individual models are necessary.
Figure 1. Cheetah 10K.7 SCSI family drive (ST3300007LC shown)
Cheetah 10K.7 SCSI Product Manual, Rev. D 1

2 Cheetah 10K.7 SCSI Product Manual, Rev. D
2.0 Applicable standards and reference documentation
The drive has been developed as a system peripheral to the highest standards of design and construction. The
drive depends upon its host equ ipment to provide adequate power and envi ronment in order to achi eve opti-
mum performance and co mpliance with applicable indus try and governmental regulations. Special attention
must be given in the areas of safety, power distribution, shielding, audible noise control, and temperature regu-
lation. In particula r, the drive must b e s ecur el y mou nted i n o rde r to gua ra nte e th e s pe ci fie d p er formance char-
acteristics. Mounting by bottom holes must meet the requirements of Section 8.4.
2.1 Standards
The Cheetah 10K.7 SC SI fa mily c ompli es w ith Seag ate standards as note d in the approp riate sectio ns o f this
Manual and the Seagate SCSI Interface Product Manual, part number 75789509.
The Cheetah 10K.7 SCSI disc drive is a UL recognized c omponent per UL 1950, CSA certi fied to CSA C22. 2
No. 950-95, and VDE certified to VDE 0805 and EN60950.
2.1.1 Electromagnetic compatibility
The drive, as delivered , is designed for system integrati on and installation into a suitable encl osure prior to
use. As such the d rive is supplied as a subassembly and is not subject to Subpart B of Part 15 of the FCC
Rules and Regulation s nor the Radio Interference Reg ulations of the Canadian Departm ent of Communica-
tions.
The design characteristics of the drive serve to minimize radiation when installed in an enclosure that provides
reasonable shielding. As such, the drive is capable of meeting the Class B limits of the FCC Rules and Regula-
tions of the Canadian Department of Communications when properly packaged. However, it is the user’s
responsibility t o assure that the drive mee ts the appropriate EMI re quirements in their system. S hielded I/O
cables may be requir ed if the en closure do es not provi de adequate shieldi ng. If the I/O cab les are exte rnal to
the enclosure, shielded cables should be used, with the shields grounded to the enclosure and to the host con-
troller.
2.1.2 Electromagnetic susceptibility
As a component a ssembly, the drive is not requ ired to meet any susc eptibi lity perfor mance requ irements. It is
the responsibilit y of those integrating the dr iv e wit hin the ir s y ste ms to perform those tests re q uire d a nd des ig n
their system to ensure th at equipment operating in the same sy stem as the drive or external to the syste m
does not adversely affect the performance of the drive. See Table 2, DC power requirements.
Cheetah 10K.7 SCSI Product Manual, Rev. D 3

2.2 Electromagnetic compliance
Seagate uses an indepe ndent laboratory to co nfirm compliance to the di rectives/standard(s) for CE Marking
and C-Tick Marking. The drive was tested in a representative system for typical applications. The selected system represents the most popular characteristics for test platforms. The system configurations include:
• Typical current use microprocessor
• 3.5-inch floppy disc drive
• Keyboard
• Monitor/display
• Printer
• External modem
•Mouse
Although the test system with this Seagate model complies to the directives/standard(s), we cannot guarantee
that all systems will comply. The computer manufacturer or system integrator shall confirm EMC compliance
and provide CE Marking and C-Tick Marking for their product.
Electromagnetic compliance for the European Union
If this model has the CE Marking it co mplies with the European Union requirements of the El ectromagnetic
Compatibility Directive 89 /336/EEC of 03 May 1989 as amend ed by Dir ective 92 /31/ EEC of 28 Apri l 1992 an d
Directive 93/68/EEC of 22 July 1993.
Australian C-Tick
If this model has th e C-Tick Marking it complies with the Austr alia/New Zeal and Standard AS/NZS3548 199 5
and meets the Electromagnet ic Compatibility (EMC) Framework requi rements of Australia’s Spectrum Management Agency (SMA).
Korean MIC
If this model has the Korean Ministry of Information and Communication (MIC) logo, it complies with paragraph
1 of Article 11 of the Electromagnetic Compatibility (EMC) Control Regulation and meets the Electroma gnetic
Compatibility Framework requirements of the Radio Research Laborator y (RRL) Ministry of Information and
Communication Republic of Korea.
Taiwanese BSMI
If this model has the Chinese National Standard (CNS) 13438 marking, it complies with Chinese National Standard (CNS) 13438 an d meets the Electromagnetic Compatibil ity (EMC) Framework requ irements of the Taiwanese Bureau of Standards, Metrology, and Inspection (BSMI).
2.3 European Union Restriction of Hazardous Substances (RoHS)
A new law, the European Union Restri ction of Hazardous Substances (RoHS) di rective, will res trict the presence of chemical subs tances, including Lead (Pb), in el ectronic products effective Ju ly 2006. The directive’s
requirements have not been finalized. This drive is manufactured with components and materials that are
expected to comply with the RoHS directive when the directive takes effect.
4 Cheetah 10K.7 SCSI Product Manual, Rev. D

2.4 Reference documents
Cheetah 10K.7 SCSI Installation Guide Seagate P/N 100260917
Safety and Regulatory Agency Specifications Seagate P/N 75789512
SCSI Interface Product Manual Seagate P/N 75789509
Applicable ANSI small computer system interface (SCSI) document numbers:
T10/1143D Enhanced SCSI Parallel Interface (EPI)
T10/1416D Primary Commands-2 (SPC-3)
T10/1417D SCSI Block Commands (SBC-2)
T10/1157D SCSI Architectural Model-2 (SAM-2)
T10/1302D SPI-3 (SCSI Parallel Interface version 3)
T10/1365D SPI-4 (SCSI Parallel Interface version 4)
SFF-8451 Specification for SCA-2 Unshielded Connections
Package Test Specification Seagate P/N 30190-001 (under 100 lb.)
Package Test Specification Seagate P/N 30191-001 (over 100 lb.)
Specification, Acoustic T est Requirements, and Procedures Seagate P/N 30553-001
In case of conflict between this document and any referenced document, this document takes precedence.
Cheetah 10K.7 SCSI Product Manual, Rev. D 5

6 Cheetah 10K.7 SCSI Product Manual, Rev. D
3.0 General description
Cheetah 10K.7 SCSI dr ives combine giant magnetoresistive (GMR) heads, partial respon se/maximum likeli-
hood (PRML) read channel electr onics, embedded servo technology, and a wide Ultra320 SCSI interface to
provide high performa nce, hi gh ] data stor age for a varie ty of s ystem s including engineering wor k statio ns , net-
work servers, mainframes, and supercomputers.
Ultra320 SCSI uses negotiated transfer rates. These transfer rates will occur only if your host adapter supports
these data transfer rates and is compatible with the required hardware requirements of the I/O circuit type. This
drive also operates at S CSI-1 and SCSI- 2 data tran sfer rat es for backw ard compatib ility with non- Ultra/ Ultra2/
Ultra320 SCSI host adapters.
Table 1 lists the features that differentiate the Cheetah 10K.7 SCSI models.
Table 1: Drive model number vs. differentiating features
Model number
ST3300007LW
ST3146707LW
ST373207LW
ST3300007LC
ST3146707LC
ST373207LC
Number of active
heads I/O circuit type [1]
8
4
Single-ended (SE) and low voltage differential (LVD) 68
2
8
4
Single-ended (SE) and low voltage differential (LVD) 80
2
Number of I/O
connector pins
[1] See Section 9.6 for details and definitions.
The drive records and recovers data on approximately 84 mm non-removable discs.
The drive supports the Small Computer System Interface (SCSI) as described in the ANSI SCSI interface
specifications to the extent desc ribed in th is m anual (v olume 1), whi ch d efines the produ ct pe rforman ce c har-
acteristics of the Cheetah 10K.7 SCSI family of drives, and the SCSI Interface Product Manual (volume 2), part
number 75789509, which desc ribes the general interface characteri stics of this and oth er families of Seagat e
SCSI drives.
The drive’s interface sup ports mul tip le ini tia tor s , disc onn ec t/r econn ec t, se lf- c onfig u ring h os t so ftware, a nd l og-
ical block addressing.
The head and disc assembly (HDA) is sealed at the factory. Air circulates within the HDA through a non-
replaceable filter to maintain a contamination-free HDA environment.
Never disassemble the HDA a nd do not at tempt to service ite ms in the sealed enclo su re (hea ds , m edi a, ac tu-
ator, etc.) as this requires specia l facilities. The d rive contains no replac eable parts. Opening the HDA voids
your warranty.
Cheetah 10K.7 SCSI Product Manual, Rev. D 7

Cheetah 10K.7 SCSI drives use a dedicated landing zone at the innermost radius of the media to eliminate the
possibility of d estroying or degrading d ata by landing in the data zone. The drive automatically goes to the
landing zone when power is removed.
An automatic shipping lock prevents potential damage to the heads and discs that results from movement during shipping and handl in g. T he s hip pin g lo ck auto mat ic all y dis eng age s whe n powe r i s ap plied to the drive and
the head load process begins.
A high-performance actuator assembly with a low-inertia, balanced, patented, straight-arm design provides
excellent performance with min im al powe r diss ipation .
3.1 Standard features
The Cheetah 10K.7 SCSI family has the following standard features:
• Integrated Ultra320 SCSI controller
• Multimode SCSI drivers and receivers—single-ended (SE) and low voltage differential (LVD)
• 16 bit I/O data bus
• Asynchronous and synchronous data transfer protocol
• Firmware downloadable via SCSI interface
• User-selectable logical block size (512 to bytes per logical block) in any multiple of four bytes
• Programmable sector reallocation scheme
• Flawed sector reallocation at format time
• Programmable auto write and read reallocation
• Reallocation of defects on command (post format)
• ECC maximum burst correction length of (320) bits
• Sealed head and disc assembly
• No preventative maintenance or adjustment required
• Dedicated head landing zone
• Embedded servo design
• Self diagnostics performed when power is applied to the drive
• Zoned bit recording (ZBR)
• Vertical, horizontal, or top down mounting
• Dynamic spindle brake
• 8,192 kbytes data buffer
• Hot plug compatibility (Section 9.6.4.2 lists proper host connector needed) for LC model drives
• Drive Self Test (DST)
• BackGround Media Scan (BGMS)
• Data Integrity Check
•Power Save
• Supports SCSI bus fairness
3.2 Media characteristics
The media used on the drive has an alumi num sub st rat e co ated with a thin fi lm magn eti c mater ia l, over coate d
with a proprietary protective layer for improved durability and environmental protection.
8 Cheetah 10K.7 SCSI Product Manual, Rev. D
3.3 Performance
• Supports industry standard Ultra320 SCSI interface
• Programmable multi-segmentable cache buffer (see Section 4.5)
• 10,000 RPM spindle. Average latency = (3.00) ms
• Command queuing of up to 64 commands
• Background processing of queue
• Supports start and stop commands (spindle stops spinning)
3.4 Reliability
• Annualized Failure Rate (AFR) of 0.62%
• LSI circuitry
• Balanced low mass rotary voice coil actuator
• Incorporates industry-standard Self-Monitoring, Analysis and Reporting Technology (S.M.A.R.T.)
• 5-year warranty
3.5 Formatted capacities
Standard OEM models are formatted to 512 bytes per block. The sector size is selectable at format time. Users
having the necessary equipm ent may mo dify the data block s ize before issuing a fo rmat comm and and obtain
different formatted capacities than those listed.
To provide a stable target capacity environment and at the same time provide users with flexibility if they
choose, Seagate recommends product planning in one of two modes:
1. Seagate designs specify capacity points at certain sector sizes that Seagate guarantees current and future
products will meet. We recommend custo mers use this capacity in their project pl anning, as it ensures a
stable operating point with bac kward and forwar d com patibility from gen eration to gener ation. The curren t
guaranteed operating points for this product are:
ST373207 ST3146707 ST3300007
Sector Size
Decimal Hex Decimal Hex Decimal Hex
512 143,374,744 88BB998 286,749,488 11177330 585,937,500 22ECB25C
514 141,025,384 867E068 282,050,768 10CFC0D0 574,712,644 22416B44
520 140,395,092 85E4254 280,790,184 10BC84A8 573,653,847 22314357
522 139,463,602 8500BB2 279,041,740 10A1D6CC 570,053,000 21FA5188
524 137,577,184 83342E0 275,154,368 106685C0 566,007,800 21BC97F8
528 557,874,778 21407E5A
2. Seagate drives also may be used at the maximum available capacity at a given sector size, but the excess
capacity above the guaranteed level will vary between 10K and 15K families and from generation to generation, depending on how each sector si ze actually for mats out for zone frequencies an d splits over serv o
bursts. This added capaci ty potent ial may range from 0.1 to 1.3 percent above th e guarant eed capacities
listed above. Us ing th e dr ives in th is mann er gi ves the ab so lute m aximu m capacity poten tial, but the user
must determine if the extra ca pacity potential is useful, or whether their assurance of backward and forward compatibility takes precedenc e.
Cheetah 10K.7 SCSI Product Manual, Rev. D 9

3.5.1 Programmable drive capacity
Using the Mode Select command, the drive can change its capacity to something less than maximum. See the
Mode Select Parameter List table in the SCSI Interface Product Manual. Refer to the Parameter list block
descriptor number of blocks field. A value of zero in the number of blocks field indicates that the drive shall not
change the capacity it i s currently forma tted to have. A number in the n umber of block s field that is less than
the maximum numbe r of LBAs changes th e total driv e capacity t o the val ue in the block des criptor number of
blocks field. A value greater than the maximum number of LBAs is rounded down to the maximum capacity.
3.6 Factory installed accessories
OEM Standard drives are shipped with the Cheetah 10K.7 SCSI Installation Guide, part number 100260917,
and the Safety a nd Regulatory Agency Spec ifications, part number 75789512 (unless otherwise specified) .
The factory also ships with the drive a small bag o f jumper plugs used for the J2, J5, and J6 option select
jumper headers on LW models only.
3.7 Options (factory installed)
All customer req uested options are inc orporated during produ ction or packaged at t he manufacturing facil ity
before shipping. Some of the options available are (not an exhaustive list of possible options):
• Other capacities can be ordered depending on sparing scheme and sector size requested.
• Single unit shipping pack. The drive is normall y shipped in bulk packagin g to provide maximum pro tection
against transit damage. Units shipped individually require additional protection as provided by the single unit
shipping pack. Users planning single unit distribution should specify this option.
• The Cheetah 10K.7 SCSI Installation Guide, part number 100260917, is usually included with each standard
OEM drive shipped, but extra copies may be ordered.
• The Safety and Regulatory Agency Specifications, part number 75 789512, is usually included with e ach
standard OEM drive shipped, but extra copies may be ordered.
3.8 Accessories (user installed)
The following accessories are available. All accessories may be installed in the field.
• Single unit shipping pack.
10 Cheetah 10K.7 SCSI Product Manual, Rev. D
4.0 Performance characteristics
4.1 Internal drive characteristics ( transparent to user)
ST3300007 ST3146707 ST373207
Drive capacity 300.0 146.8 73.4 GByte (formatted, rounded off values)
Read/write heads 8 4 2
Bytes/track 556 556 556 Kbytes (average, rounded off values)
Bytes/surface 50.5 50.5 50.5 Gbytes (unformatted, rounded off values)
Tracks/surface (total) 90,774 90,774 90,774 Tracks (user accessible)
Tracks/inch 105,000 105,000 105,000 TPI
Peak bits/inch 658 658 658 KBPI
Internal data rate 470 - 944 470 - 944 470 - 944 Mbits/sec (variable with zone)
Disc rotational speed 10,000 10,000 10,000 r/min
Average rotational latency 3.00 3.00 3.00 msec
4.2 SCSI performance characteristics (visible to user)
The values given in Section 4.2.1 apply to all models of the Cheetah 10K.7 SCSI family unless otherwise specified. Refer to Section 9.10 and to the SCSI Interface Product Manual for additional timing details.
Cheetah 10K.7 SCSI Product Manual, Rev. D 11

4.2.1 Access time [4]
Not including controller overhead
(without disconnect) [1]
(ST3300007 data shown)
Drive level
Read Write
msec
Average—Typical [2] 4.9 5.4
Single Track—Typical [2] 0.45 0.65
Full Stroke—Typical [2] 9.9 10.5
4.2.2 Format command execution time (minutes) [1]
ST3300007 ST3146707 ST373207
Maximum (with verify) 200 100 50
Maximum (no verify) 100 50 25
4.2.3 Generalized performance characteristics
Minimum sector interleave 1 to 1
Data buffer transfer rate to/from disc media (one 512-byte sector):
ST3300007 ST3146707 ST373207
Minimum* 59 59 59 MBytes/sec
Maximum 118 118 118 MBytes/sec
Sustainable disc transfer rate:
ST3300007 ST3146707 ST373207
Minimum* 39 39 39 MBytes/sec
Maximum 80 80 80 MBytes/sec
Note. 1 Megabyte (MB) = 1,000,000 bytes.
SCSI interface data transfer rate (asynchronous):
Maximum instantaneous one byte wide 5.0 Mbytes/sec [3]
Maximum instantaneous two bytes wide 10.0 Mbytes/sec [3]
Synchronous transfer rate Ultra320 SCSI
In low voltage differential (LVD) interface mode 5.0 to 320 Mbytes/sec
Sector Sizes:
Default 512 byte user data blocks
12 Cheetah 10K.7 SCSI Product Manual, Rev. D

Variable 512 to 528 bytes per sector in even number of bytes per sector.
If n (number of bytes per sector) is odd, then n-1 will be used.
Read/write consecutive sectors on a track Yes
Flaw reallocation performance impact (for flaws reallocated at format time using
the spare sectors per sparing zone reallocation scheme.)
Average rotational latency 3.0 msec
Notes for Section 4.2.
[1] Execution time measu red from receipt of the last by te of the Command Descriptor B lock (CDB) to the
request for a Status Byte Transfer to the Initiator (excluding connect/disconnect).
[2] Typical access times are measured u nder nom inal condi tions of te mpera ture, v oltage, and ho rizontal or i-
entation as measured on a representative sample of drives.
[3] Assumes system ability to support the rates listed and no cable loss.
[4] Access to data = access time + latency time.
Negligible
4.3 Start/stop time
After DC power at nomi nal voltage h as been ap plied, th e drive becom es rea dy withi n 25 se conds if the Mo tor
Start Option is disabled (i.e. the motor sta rts as soon as the power has be en applied). If a rec overable error
condition is detected during the start sequence, the drive executes a recovery procedure which may cause the
time to become ready to exceed 25 se conds. During spi n up to ready tim e the drive responds to some commands over the SCSI interface in less than 3 seconds after application of power. Stop time is 30 seconds from
removal of DC power.
If the Motor Start Option is enabled , the interna l contro ller acc epts the command s liste d in the S CSI Inter face
Product Manual less than 3 seconds after DC power has been appli ed. After the Motor Start Command has
been received the dri ve becomes re ady for norma l operations withi n 25 second s typically (excluding a n error
recovery procedur e). The Motor Start Command can also be u sed to command t he drive to stop the spi ndle
(see the SCSI Interface Product Manual).
There is no power control switch on the drive.
4.4 Prefetch/multi-segmented cache control
The drive provides prefetch (read look-ahead) and multi-segmented cache control algorithms that in many
cases can enhance system performance. “Cache” as used herein refers to the drive buffer storage space when
it is used in cache operations. To select prefetch and cache features the host sends the Mode Select command
with the proper v alues in the applicabl e bytes in Mode Page 08h (see the SCSI Interf ace Product Manual).
Prefetch and cache ope ration are independent fe atur es fr om the s tandpoint tha t ea ch is enabled and disabled
independently via the Mode Select command. However, in actual operation the prefetch feature overlaps
cache operation somewhat as is noted in Section 4.5.1 and 4.5.2.
All default cache and prefetch Mode paramete r values (Mode Page 08 h) for standard OEM versions of this
drive family are given in Tables 7, 8, and 9.
4.5 Cache operation
In general, 6,991 kbytes of the physical buffer space in the drive can be used as storage space for cache operations. The buffer can be d ivided into logical segments (Mode Selec t Page 08h, byte 13) from which data is
read and to which data is written. The drive supports a maximum of 64 cache segments. The drive maintains a
table of logical block dis c medium a ddres ses of th e data stored i n eac h segm ent of the buffer. If cache operation is enabled (RCD bit = 0 in Mode Page 08h, byte 2, bit 0. See SCSI Interface Product Manual), data
requested by the hos t with a Read command i s r etr ie ve d fro m the bu ffer (if i t i s th er e), b efo re an y di sc ac ce ss
Cheetah 10K.7 SCSI Product Manual, Rev. D 13

is initiated. If c ache oper ation is no t enabl ed, the buffer (stil l se gmented with r equired num ber of s egments) is
still used, but only as circular buffer segments during disc medium read operations (disregarding Prefetch
operation for the momen t). That is, the drive does not check in the buffer segments for the requested read
data, but goes directly to the medium to retrieve it. The retrieved data merely passes through some buffer segment on the way to the h ost. On a ca che mis s, all data transfe rs to the hos t are in acc ordance wi th buffer-full
ratio rules. On a cache h it the dr ive igno res the buffer-full r atio rules . See e xplanations associa ted with Mode
page 02h (disconnect/reconnect control) in the SCSI Interface Product Manual.
The following is a simplified description of a read operation with cache operation enabled:
Case A - A Read command is received and the first logical block (LB) is already in cache:
1. Drive transfers to the initiator the first LB requested plus all subsequent contiguous LBs that are already in
the cache. This data may be in multiple segments.
2. When the requested LB is reached that is not in any cache segment, the drive fetches it and any remaining
requested LBs from th e disc and puts them in a segment of the c ache. The drive transfers the rem aining
requested LBs from the ca che to t he host in accorda nce with the disconn ect/r econn ect speci fication mentioned above.
3. If the prefetch feature is enabled, refer to Section 4.5.2 for operation from this point.
Case B - A Read command requests data, the first LB of which is not in any segment of the cache:
1. The drive fetches the requested LBs from the disc and transfers them into a segm ent, and from there to
the host in accordance with the disconnect/reconnect specification referred to in case A.
2. If the prefetch feature is enabled, refer to Section 4.5.2 for operation from this point.
Each buffer segment is act ually a self-containe d circular sto rage (wrap-arou nd occurs), the length of which is
an integer number sectors. The wrap-around capability of the individual segments greatly enhances the
buffer’s overall performance as a cache storage, allowing a wide range of user selectable configurations, which
includes their use in the prefetch operat ion (if enabled) , even when cache ope ration is disab led (see Section
4.5.2). The number of segmen ts is set dyna mically by the dri ve and can not norm ally be s et by the h ost (it ca n
be set using the PM bit as describe d in Section 4.5.3). The siz e in Kbytes of each segmen t is not reported by
the Mode Sense command page 08h, bytes 14 and 15. The value 0XFFFF is always reported. If a size specification is sent by the ho st in a M ode Select c ommand (byte s 14 and 15) no new segm ent si ze is set up b y the
drive, and if the STRICT bit in Mode page 00h (byte 2, bit 1) is set to one, the drive responds as it does for any
attempt to change unchangeable parameters (see SCSI Interface Product Manual).
4.5.1 Caching write data
Write caching is a write operation by the drive th at mak es use of a drive buffer sto ra ge ar ea where the da ta t o
be written to the medium is stored in one or more segments while the drive performs the write command.
If read caching is enabled (RCD=0), then data written to the medium is retained in the cache to be made available for future read cache h its. The same buffer space an d segme ntation is use d as set up for read functions .
The buffer segmentation s cheme is set up or changed independently, having nothing to do with the state of
RCD. When a write command is issued, i f RCD=0, the cache is first checke d to see if any logical blocks tha t
are to be written are a lready stored in the cache f rom a previous read or write comman d. If there are, the
respective cache segments are cleared. The new data is cached for subsequent Read commands.
If the number of write data logi cal block s exceeds th e size of the s egment being wr itten into, whe n the end of
the segment is reached, the data is written into the beginning of the same cache segment, overwriting the data
that was written there at the beginning of the operation. However, the drive does not overwrite data that has not
yet been written to the medium.
14 Cheetah 10K.7 SCSI Product Manual, Rev. D

If write caching is enabled (WCE=1), t hen the drive may return GOOD status on a write command a fter the
data has been transferred into the cache, but before the data has been written to the medium. If an error
occurs while writing the data to the medium, and GOOD status has already been returned, a deferred error will
be generated.
The Synchronize Cache command may be used to force the drive to write all cached write data to the medium.
Upon completion of a Synchronize Cache command, all data received from previous write commands will have
been written to the medium.
Tables 7, 8, and 9 show Mode default settings for the drives.
4.5.2 Prefetch operation
If the Prefetch fea ture i s ena bl ed, data in co nti guo us lo gi cal b lock s on t he d is c immediately beyond tha t whi ch
was requested by a Read command can be re trieved and stored in the buffer for i mmediate transfer from the
buffer to the host on subsequ ent Read com mands that request t hose logica l block s (this is tr ue even if cache
operation is disabled). Though the prefetch operation uses the buffer as a cache, finding the requested data in
the buffer is a prefetch hit, not a cache operation hit. Prefetch is enabled using Mode Select page 08h, byte 12,
bit 5 (Disable Read Ahead - DRA bit). DRA bit = 0 enables prefetc h. Since data that is pre fetched replaces
data already in some buffer segment(s ), the hos t can lim it the amou nt of pr efet ch data to optimi z e syst em per formance. The max prefetch field (bytes 8 a nd 9) limits the amount of pref etch. The drive does not use the
Prefetch Ceiling field (bytes 10 and 11).
During a prefetch operati on, the dri ve crosses a cylinde r boundary to fetch mor e data only if th e Discontinu ity
(DISC) bit is set to one in bit 4 of byte 2 of Mode parameters page 08h.
Whenever prefetch ( re ad loo k-ah ead) is enabled (ena ble d b y DRA = 0) , it operates under th e con t rol of A R LA
(Adaptive Read Look-Ahead). If the host uses software interleave, ARLA enables prefetch of contiguous
blocks from the disc when it senses that a prefetch hit will likely occur, even if two consecutive read operations
were not for physically con tiguou s blocks of da ta (e.g., “software i nterleave”) . ARLA disab les prefetc h when it
decides that a prefetch hit will not likely occur. If the host is not using software interleave, and if two sequential
read operations are no t for c ontigu ous bloc ks of data, ARLA d isables prefetc h, but as long as se quentia l read
operations request contiguous blocks of data, ARLA keeps prefetch enabled.
4.5.3 Optimizing cache performance for desktop and server applications
Desktop and server applications require different drive caching operations for optimal performance. This
means it is difficult to provide a single configuration that meets both of these needs. In a desktop environment,
you want to con figure the cache to respond q uickly to repetitive ac cesses of multiple s mall segmen ts of data
without taking the time to “look ahea d” to the next conti guous segmen ts of data. In a server environ ment, you
want to configure the cac he to provide large volumes of seque ntial data in a non-repetitive manner. In this
case, the ability of the cache to “look ahead” to the next contiguous segmen ts of sequential data is a good
thing.
The Performance Mode (PM) bit contr ols the way the drive switches the cache buffer into different modes o f
segmentation. In “server mode” (PM bit = 0), the drive can dynamically cha nge the number of cache buffer
segments as needed to opt imize the performa nce, based on the command st ream from the hos t. In “desktop
mode” (PM bit = 1), the number of segments is maintained at the value defined in Mode Page 8, Byte 13, at all
times (unless changed by using a Mode Select command). For additional information about the PM bit, refer to
the Unit Attention Param eters page (00h) of the Mode Sense command (1Ah) in the SCSI Interfac e Product
Manual, part number 75789509.
Cheetah 10K.7 SCSI Product Manual, Rev. D 15

16 Cheetah 10K.7 SCSI Product Manual, Rev. D
5.0 Reliability specifications
The following reliabi lity specifications assume cor rect host/drive operational interfa ce, including all interface
timings, power supply voltages, environmental requirements and drive mounting constraints (see Section 8.4).
Seek Errors
Less than 10 in 10
Read Error Rates [1]
Recovered Data Less than 10 errors in 10
Unrecovered Data Less than 1 sector in 10
Miscorrected Data Less than 1 sector in 10
AFR 0.62%
Service Life 5 years
Preventive Maintenance None required
Note.
[1] Error rate specified with automatic retries and data correction with ECC enabled and all flaws reallocated.
5.1 Error rates
The error rates stated in this specification assume the following:
• The drive is operated per this specification using DC power as defined in this manual (see Section 6.2).
• Errors caused by host system failures are excluded from error rate computations.
• Assume random data.
• Default OEM error r ecovery settings are applied. Thi s includes AWRE, ARRE, full read retries, fu ll write
retries and full retry time.
8
seeks
12
bits transferred (OEM default settings)
15
bits transferred (OEM default settings)
21
bits transferred
5.1.1 Recoverable Errors
Recovereable errors are those detected and corrected by the drive, and do not require user intervention.
Recoverable Data errors will use co rrection, although ECC on -the-fly is not considered for purposes of recov-
ered error specifica tio ns.
Recovered Data error rate is determine d using read bits transfer red for recove rable errors occurring dur ing a
read, and using write bits transferred for recoverable errors occurring during a write.
5.1.2 Unrecoverable Erro rs
Unrecoverable Data Error s (Sense Ke y = 03h) ar e specified at l ess than 1 se ctor in erro r per 10
15
bits trans-
ferred. Unrecoverable Data Errors resulting from the same cause are treated are 1 error for that block.
Cheetah 10K.7 SCSI Product Manual, Rev. D 17

5.1.3 Seek errors
A seek error is defined as a fail ur e of the dr i ve to pos it ion the heads to the addressed t rack . After dete cti ng a n
initial seek error, the drive automatically performs an error recovery process. If the error recovery process fails,
a seek positioning error (Error code = 15h or 02h) will be reporte d with a Hardware error (04h) in t he Sense
Key. Re coverab le seek errors ar e spec ified at Less than 10 er rors in 10
8
seeks. Unrecoverable seek errors
(Sense Key = 04h) are classified as drive failures.
5.2 Reliability and service
You can enhance the reliability of Cheetah 10K.7 SCSI disc dr ives by ensuring that the dr ive receives adequate cooling. S ection 6.0 provides temperature measurements and other informa tion that may be used to
enhance the service life of the drive. Section 8.3 provides recommended air-flow information.
5.2.1 Annualized Failure Rate (AFR)
The production disc dr ive shall achieve an AFR of 0.62% when oper ated in an environm ent that ensures th e
HDA case temperatur es spec ified in Sectio n 6. 4 are not exce eded. S hort -term ex cursi ons u p to th e spec ification limits of the operating e nvironment will not affect AFR perfor mance. Continual or sustained operation at
case temperatures above the values shown in Section 6.4.1 may degrade product reliability.
Estimated power-on operation hours means power-up hours per disc drive times the total number of disc
drives in service. Ea ch dis c drive shall h ave accu mulate d at le ast nine months of operatio n. Data sha ll be ca lculated on a rolling average base for a minimum period of six months.
AFR is based on the following assumption s:
• 8,760 power-on hours per year.
• 250 average on/off cycles per year.
• Operations at nominal voltages.
• Systems will prov ide adequate coolin g to ensure the case temperatures specified in Sec tion 6.4.1 are not
exceeded.
Drive failure means any stoppage or substandard performance caused by drive malfunction.
A S.M.A.R.T. predi ctive fail ure in dicat es that the dri ve is deter iorat ing to an imm inent fai lure and is consi dere d
an AFR hit.
5.2.2 Preventive maintenance
No routine scheduled preventive maintenance shall be required.
5.2.3 Hot plugging Cheetah 10K.7 SCSI disc drives
The ANSI SPI-3 (T10/13 02D) document defines the physical requir ements for removal and insertion of SCSI
devices on the SCSI bus. Four cases are addressed. The cases are differentiated by the state of the SCSI bus
when the removal or insertion occurs .
Case 1 - All bus devices powered off during removal or insertion
Case 2 - RST signal asserted continuously during removal or insertion
Case 3 - Current I/O processes not allowed during insertion or removal
Case 4 - Current I/O process allowed during insertion or removal, except on the device being changed
18 Cheetah 10K.7 SCSI Product Manual, Rev. D

Seagate Cheetah 10K.7 SCSI disc drives support all four hot plugging cases . Provision shall be made by the
system such tha t a dev ice being inserted makes p ower a nd g ro und c onn ect ion s pr ior to the connection of any
device signal co ntact to the bus. A device bein g removed shall maintain p ower and grou nd connecti ons after
the disconnection of any device signal contact from the bus (see SFF-8451 Specification for SCA-2 Unshielded
Connections).
It is the responsibility of the systems integrator to assure that no hazards from temperature, energy, voltage, or
ESD potential are presented during the hot connect/disconnect operation.
All I/O processes for th e SCSI device bein g inserted or remov ed shall be quiesc ent. All SCSI devices on the
bus shall have receivers that conform to the SPI-3 standard.
If the device being hot plugged uses single-ended (SE) drivers and the bus is currently operating in low voltage
differential (LVD) mode, then all I/O processes fo r all dev ices on the bus must be compl eted, an d the bus quiesced, before attempting to hot plug. Following the insertion of the newly installed device, the SCSI host
adapter must issue a Bus Reset, fol lowed by a sy nchronous transfer ne gotiation . Failure to per form the SCSI
Bus Reset could result in erroneous bus operations.
The SCSI bus termination and termination power source shall be external to the device being inserted or
removed.
End users shoul d not mix devices with high vol tage differential (HVD) driv ers and r eceivers a nd devices with
SE, LVD, or multimode drivers and receivers on the same SCSI bu s since the comm on mode vo ltages in the
HVD environment may not be controlled to safe levels for SE and LVD devices (see ANSI SPI-3).
The disc drive s pindle must come to a complete s top prior to completely removing the drive from the cabine t
chassis. Use of th e Stop Spindle command or partial withdr awal of the drive, e nou gh to b e disco nnecte d fro m
the power source, prior to removal are methods for insuring that this requirement is met. During drive insertion,
care should be taken to avoid exceeding the limits stated in Section 6.4.4, "Shock and vibration" in this manual.
5.2.4 S.M.A.R.T.
S.M.A.R.T. is an ac ronym for Se lf-Monitor ing Analys is and Reporti ng Technology. This technology is intended
to recognize conditions that indicate drive degradation and is designed to provide sufficient warning of a failure
to allow data back-up before an actual failure occurs.
Note. The firmwa re will monitor s pecific attribute s for degradation over time but canno t predict instanta-
neous drive failures.
Each attribute monit ors a specif ic set of co nditions in the operating pe rformance of the drive, and the thresholds are optimized to minimize “false” predictions.
Controlling S.M.A.R.T.
The operating mode of S.M .A.R.T. is controlled by the DEXCPT bit and the PERF bit of the “Informational
Exceptions Control Mo de Page” (1Ch) . The DEXCPT bit i s used to ena ble or dis able the S .M.A.R.T. process.
Setting the DEXCPT bit will disable all S.M.A.R.T. functions. When enabled, S.M.A.R.T . will collect on-line data
as the drive performs normal read/w rite oper ation s. When th e PERF bit is s et, the drive i s consi dered to b e in
“On-line Mode Only” and will not perform off-line functions.
The process of measuring off-line attributes and saving data can be forced by the Rezero Unit command. Forcing S.M.A.R.T. will reset the timer so that the next scheduled interrupt will be two hours.
The drive can be interrogated by the host to determine the time remaining before the next scheduled measurement and data logging process will occu r. This is accomplished by a log sense command to log page 0x3E.
The purpose is to allow the customer to control when S.M.A.R.T. interruptions occur. As described above, forcing S.M.A.R.T by the Rezero Unit command will reset the timer.
Cheetah 10K.7 SCSI Product Manual, Rev. D 19

Performance impact
S.M.A.R.T . attribute data will be saved to the disc for the purpose of recreating the events that caused a predictive failure. The driv e wi ll measure and save parameters on ce ev ery two hours subject to an idle period on the
SCSI bus. The process of measu ring off-line attribute data and saving data to the disc is uninterruptable and
the maximum delay is summarized below:
Maximum processing delay
On-line only delay Fully enabled delay
S.M.A.R.T. delay times 60 milliseconds 370 milliseconds
DEXCPT = 0, PERF = 1 DEXCPT = 0, PERF = 0
Reporting control
Reporting is contr olled in the Inform ational Exceptions Control Page (1Ch). Subject to the repo rting method,
the firmware will report a predicti ve 01-5D 00 sens e code. Th e error code is pr eserv ed through bus re sets and
power cycles.
Determining rate
S.M.A.R.T. monitor s the rate at which err ors occ ur and sign als a pred ictive fai lure if the rate of degr aded err or
rate increases to an un acce ptab le le ve l. To determine rate, error events are logged and compar ed to the number of total operations for a given attribut e. The interval defines the number of operatio ns over which to measure the rate. The counter that kee ps track of the current number of oper ations is referred to as the Interval
Counter.
S.M.A.R.T. measu res error rate, hence for each attribute th e occurrence of an error is recorded . A counter
keeps track of the number of errors for the current interval. This counter is referred to as the Failure Counter.
Error rate is simply the number of errors per s et of operations. The al gorithm that S.M.A.R. T. uses to record
rates of error is to s et th r esh ol ds for th e n umb er of erro rs a nd t he i nte rval . If the number of errors ex ce eds th e
threshold before the interval expires, then the error rate is considered to be unacceptable. If the number of
errors does not exceed the threshold before the interval expires, then the error rate is considered to be acceptable. In either case, the interval and failure counters are reset and the process starts over.
Predictive failures
S.M.A.R.T. signal s predic tive fai lures when the drive is perf orming una ccep tably for a period of tim e. The firmware keeps a running count of the number of times the error rate for each attribute is unacceptable. To accomplish this, a counter is incre mented wheneve r the error rate is unacc eptable and decremen ted (not to exceed
zero) whenever the error rate is acceptable. This counter is referred to as the Failure History Counter. There is
a separate Failure History Cou nter for each attribute. Should the counter continually be inc rem en ted suc h tha t
it reaches the predictive threshold, a predictive failure is signaled.
5.2.5 Thermal monitor
Cheetah 10K.7 SCSI drives implement a temperature warning system which:
1. Signals the host if the temperature exceeds a value which would threaten the drive.
2. Signals the host if the temperature exceeds a user-specified value.
3. Saves a S.M.A.R.T. data frame on the drive which exceed the threatening temperature value.
A temperature sensor monito rs the drive temperature and is sues a warning over the int erface when the temperature exceeds a s et threshol d. The temper ature is measured at power-up an d then at te n-minute intervals
after power-up.
20 Cheetah 10K.7 SCSI Product Manual, Rev. D

The thermal monitor syste m generates a wa rning code of 01- 0B01 when the temp erature exceed s the specified limit in compl iance with the SCSI standard. T he drive temperature is repo rted in the FRU code field o f
mode sense data. You can use this information to determine if the warning is due to the temperature exceeding
the drive threatening temperature or the user-specified temperature.
This feature is controlled by the Enable Warning (EWasc) bit, and the reporting mechanism is controlled by the
Method of Reporting Informational Exceptions field (MRIE) on the Informational Exceptions Control (IEC)
mode page (1Ch).
The current algorithm impl ements two temperature trip points. The first trip point is set at 68°C which is the
maximum temperatur e limit a ccordi ng to th e dri ve spec ific ation. T he secon d trip point is us er-se lectable using
the Log Select command. The reference temperature parameter in the temperature log page (see Table 1) can
be used to set this trip point. The default value for this drive is 68°C, however, you can set it to any value in the
range of 0 to 68°C. If you specify a temperature g reater than 68°C in this fi eld, the temperature is rou nded
down to 68°C. A sense code is sent to the host to indicate the rounding of the parameter field.
Table 1: Temperature Log page (0Dh)
Parameter Code Description
0000h Primary Temperature
0001h Reference Temperature
When the first temperature trip point is exceeded, S.M.A.R.T. data is collected and a frame is saved to the disc.
5.2.6 Drive Self Test (DST)
Drive Self Test ( DST) is a technology design ed to recognize drive fault c onditions that qualify the driv e as a
failed unit. DST validates the functionality of the drive at a system level.
There are two test coverage options implemented in DST:
1. Extended test
2. Short text
The most thorough option is the extended test that performs various tests on the drive and scans every logical
block address (LBA ) of the drive. The s hort test is time-r estricted and limited i n length—it does n ot scan the
entire media surface, but does some fundamental tests and scans portions of the media.
If DST encounters an er ror during either of these tests, i t reports a fault condition. If the dr ive fails the test,
remove it from service and return it to Seagate for service.
Cheetah 10K.7 SCSI Product Manual, Rev. D 21

5.2.6.1 DST Failure Definition
The drive will presen t a “diagnostic failed” con dition through the self-te sts results value of the diagnos tic log
page if a functional failur e is enco untered du ring DST. The channel and servo parameters are not mod ified to
test the drive more strin gently, and the number of retries are not redu ced. All retries and recovery proce sses
are enabled during the test. If data is recoverable, no failure condition will be reported regardless of the number
of retries required to recover the data.
The following conditions are considered DST failure conditions:
• Seek error after retries are exhausted
• Track-follow error after retries are exhausted
• Read error after retries are exhausted
• Write error after retries are exhausted
Recovered errors will not be reported as diagnostic failures.
5.2.6.2 Implementation
This section provides all of the information necessary to implement the DST function on this drive.
5.2.6.2.1 State of the drive prior to testing
The drive must be in a ready state before issuing the Send Diagno stic command . There are multipl e reasons
why a drive may not be ready, some of which are valid conditions, and not errors. For example, a drive may be
in process of doing a format, or another DST . It is the responsibility of the host application to determine the “not
ready” cause.
While not technically part of DST, a Not Ready condition also qualifies the drive to be returned to Seagate as a
failed drive.
A Drive Not Ready condition is reported by the drive under the following conditions:
• Motor will not spin
• Motor will not lock to speed
• Servo will not lock on track
• Drive cannot read configuration tables from the disc
In these conditions, the drive responds to a Test Unit Ready command with an 02/04/00 or 02/04/03 code.
5.2.6.2.2 Invoking DST
To invoke DST, submit the Send Diagnostic com mand with the ap propria te Function Code (001b for the shor t
test or 010b for the extended tes t) in bytes 1, bits 5, 6, and 7. Refer to the Seaga te SCSI Interface Product
Manual, part number 75789509, for additional information about invoking DST.
5.2.6.2.3 Short and extended tests
DST has two testing options:
1. short
2. extended
These testing options are described in the following two subsections.
Each test consists of th ree s egm ents: a n el ec tric al test segm ent, a servo test segment , and a rea d/v er ify s ca n
segment.
22 Cheetah 10K.7 SCSI Product Manual, Rev. D

Short test (Function Code: 001b)
The purpose of the short test is to provide a time- l imi ted te st tha t tests as much of th e dr iv e as po ss ib le wi thi n
120 seconds. The shor t test does not scan the entire me dia surface, but does some funda mental tests and
scans portions of the media. A complete read/verify scan is not performed and only factual failures will report a
fault condition. This option provides a quick confidence test of the drive.
Extended test (Function Code: 010b)
The objective of the extended test option is to empirically test critical drive components. For example, the seek
tests and on-track operations tes t the pos it ion ing mec han ism. T he read operation tests the read head element
and the media surface. The write element is tested throu gh read/write/read operations. The inte grity of the
media is checked through a r ead/verif y scan of the med ia. Motor functio nality is tested by d efault as a part of
these tests.
The anticipated length of the Extended test is reported through the Control Mode page.
5.2.6.2.4 Log page entries
When the drive begi ns DST, it creates a new entry in the Self -te st Resul ts Log page . The new entr y is c reated
by inserting a new self-test parameter block at the beginning of the self-test results log parameter section of the
log page. Existing da ta will be moved to make room f or the new parameter block. The dr iv e reports 20 parameter blocks in the log page. If there are more than 20 parameter blocks, the least recent parameter block will be
deleted. The new parameter block will be initialized as follows:
1. The Function Code field is set to the same value as sent in the DST command
2. The Self-Test Results Value field is set to Fh
3. The drive will store the log page to non-volatile memory
After a self-test is complete or has been aborted, the dr i ve updates the Self-Te st Re su lts Value field in its Self-
Test Results Log page i n n on- v ola tile m emo ry. The host may use Log Se ns e to re ad th e res ul ts from up to th e
last 20 self-tests performed by the drive. The self-test results value is a 4-bit field that reports the results of the
test. If the field is zero, the drive passed with no erro rs detected by the DST. If the field is not zero, the test
failed for the reason reported in the field.
The drive will report th e failure condition and LBA (i f applicable) in the Self-tes t Results Log parameter. The
Sense key, ASC, ASCQ, and FRU are used to report the failure condition.
5.2.6.2.5 Abort
There are several ways to abort a diagnostic. You can use a SCSI Bus Reset or a Bus Device Reset message
to abort the diagnostic.
You can abor t a DST exec uting in back ground m ode by using the abort code in the DST Function Cod e field.
This will cause a 01 ( self-test aborted b y the application cl ient) code to appear i n the self-test results v alues
log. All other abort mechanisms will be reported as a 02 (self-test routine was interrupted by a reset condition).
5.2.7 Product warranty
Beginning on the date of shipment to customer and continuing for a period of five years, Seagate warrants that
each product (including components and subassemblies) or spare part that fails to function properly under normal use due to defect in mate rials on workm anship or due to no nconfo rmance to the appl icable s pecif ications
will be repaired or rep laced, at Seagate’s option an d a t no charge to customer, if returned by cus tom er at cu stomer’s expens e to Seagate’s designated faci lity in accordance wit h Seagate’s warranty proced ure. Seagate
will pay for transporting the r epair or replacement item to customer. For more detailed war ranty information
refer to the Standard terms and conditions of Purchase for Seagate products.
Cheetah 10K.7 SCSI Product Manual, Rev. D 23

Shipping
When transporting or shipping a dr ive, a Seagate approved container mus t be used. Keep your original box.
They are easily identified by the Seagate-approved package label . Shipping a drive in a non-approved container voids the drive warranty.
Seagate repair center s may refuse receipt of components improperly packaged or obviously da mag ed in tr ansit. Contact your Autho r iz ed Se agat e Di s tribu tor to pu rc ha se add iti on al box es . Se a gate re comm ends shipping
by an air-ride carrier experienced in handling computer equipment.
Product repair and return information
Seagate authorized customer service centers are the only facilities authorized to service Seagate drives.
Seagate does not sanction a ny third-party repair facili ties. Any un authorized repair or tamper ing with the factory-seal voids the warranty.
24 Cheetah 10K.7 SCSI Product Manual, Rev. D

6.0 Physical/electrical spe cifications
This section pr ovides information re lating to the physica l and electrical char acteristics of the Cheetah 10K.7
SCSI drive.
6.1 AC power requirements
None.
6.2 DC power requirements
The voltage and current requi rements for a single drive are shown in the follo wing tables. Values indic ated
apply at the drive power connector. The table shows current values in Amperes.
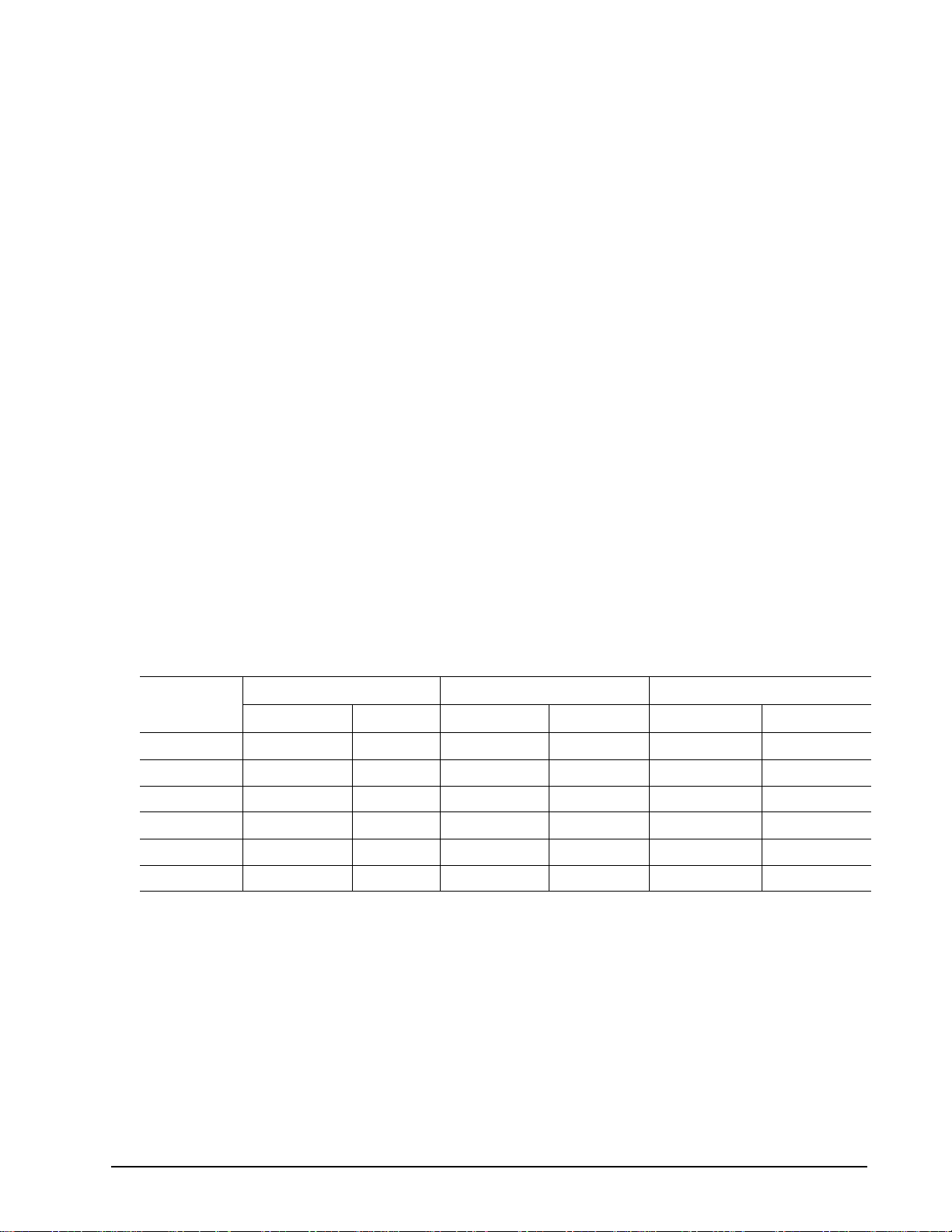
Table 2: DC power requirements
ST3300007
Notes
Voltage +5V +12 V +5V +12 V
Regulation [5] ±5% ±5%[2] ±5% ±5% [2]
Average idle current DC X
Maximum starting current
(peak DC) DC
(peak AC) AC 3σ
Delayed motor start (max) DC
Peak operating current
DC X
Maximum DC 3σ
Maximum (peak) DC 3σ
3σ
[1][7] 0.54 0.62 0.54 0.62
[3]
[3]
3σ [1][4] 0.52 0.06 0.53 0.06
[1][6]
[1]
0.77
1.16
0.69
0.70
1.62
SE mode LVD mode
1.91
3.71
1.07
1.08
2.74
0.77
1.16
0.68
0.69
1.62
1.91
3.88
1.09
1.10
2.76
Cheetah 10K.7 SCSI Product Manual, Rev. D 25

ST3146707
Notes
SE mode LVD mode
Voltage +5V +12 V +5V +12 V
Regulation [5] ±5% ±5%[2] ±5% ±5%[2]
Average idle current DC X
[1][7] 0.54 0.42 0.54 0.42
Maximum starting current
(peak DC) DC
3σ
(peak AC) AC 3σ
Delayed motor start (max) DC
[3]
[3]
3σ [1][4] 0.54 0.06 0.54 0.06
0.77
1.09
1.89
3.66
0.76
1.06
1.89
3.83
Peak operating current
DC X
Maximum DC 3σ
Maximum (peak) DC 3σ
[1][6]
[1]
Notes
0.60
0.62
1.52
0.81
0.83
2.50
SE mode LVD mode
0.61
0.63
1.44
ST373207
0.83
0.85
2.48
Voltage +5V +12 V +5V +12 V
Regulation [5] ±5% ±5%[2] ±5% ±5% [2]
Average idle current DC X
[1][7] 0.54 0.34 0.54 0.34
Maximum starting current
(peak DC) DC
3σ
(peak AC) AC 3σ
Delayed motor start (max) DC
[3]
[3]
3σ [1][4] 0.54 0.06 0.54 0.06
0.76
1.08
1.55
3.04
0.77
1.03
1.56
3.36
Peak operating current
DC X
Maximum DC 3σ
Maximum (peak) DC 3σ
[1][6]
[1]
0.62
0.63
1.56
0.73
0.76
2.46
0.60
0.61
1.48
0.72
0.74
2.40
[1] Measured with avera ge r e adi ng D C amm eter or equivalent sam pling sc op e. I nsta ntaneou s c ur rent pea ks
will exceed these values . Power supply at nomi nal voltage. Number of driv es tested = 6, 35 Degrees C
ambient.
[2] For +12 V, a –10% tolerance is permissible during in itial start of spindle , and must return t o ±5% before
10,000 rpm is rea ched. The ±5% must b e main tained after the dri ve sign ifies th at its power-up se quence
has been completed and that the drive is able to accept selection by the host initiator.
[3] See +12 V current profile in Figure 2.
[4] This condition occu rs when the Motor Start Option is ena bled and the drive h as not yet receiv ed a Start
Motor command.
[5] See Section 6.2.1 “Con ducted Noise Immunity.” Specified voltage tolerance is inclusive of r ipple, noise,
and transient response.
[6] Operating condition is defined as random 8 block reads at:
257 I/Os per second (ST3300007) LVD
257 I/Os per second (ST3146707) LVD
256 I/Os per second (ST373207) LVD
Current and power spec ified at nomin al voltages. Dec reasing +5 volts by 5% incr eases 5 vol t current by
<0.5%. Decreasing +12 vo lt supply by 5% increases 12 volt current by 1.4% (2% fo r ST 3146707 and
ST373207 models).
[7] During idle, the d rive heads are reloca ted every 60 seconds to a random location within the band from
26 Cheetah 10K.7 SCSI Product Manual, Rev. D

three-quarters to maximum track.
General Notes from Table 2:
1. Minimum current l oading fo r each sup ply voltage is not les s than 1. 2% of the ma ximum o perating current
shown.
2. The +5 and +12 volt supplies shall employ separate ground returns.
3. Where power is provided to multiple drives from a common supply, careful consideration for individual
drive power requirem ents s hou ld b e no ted. Whe re mu lti ple uni ts ar e pow er ed o n simu lta neou sl y, the peak
starting current must be available to each device.
4. Parameters, other than spindle start, are measured after a 10-minute warm up.
5. No terminator power.
6.2.1 Conducted noise immunity
Noise is specified a s a periodic an d random distri bution of frequenc ies covering a band from DC to 20 MHz.
Maximum allowed noise values given below are peak to peak measurements and apply at the drive power connector.
+5 V = 250 mV pp from 100 Hz to 20 MHz.
+12 V = 800 mV pp from 100 Hz to 8 KHz.
450 mV pp from 8 KHz to 20 KHz.
250 mV pp from 20 KHz to 5 MHz.
6.2.2 Power sequencing
The drive does not require power sequenci ng. The drive prote cts against inadver tent writing dur ing power-up
and down. Daisy-chain op er ation r equ ir es that power be supplied to the SCS I bu s terminator to ensure pro per
termination of the per ipheral I/O cable s. To automa tically delay moto r start based on the targe t ID (SCSI ID)
enable the Delay Motor Start option and disable the Enable Motor Start option on the J2 connector on L W models or on the backplane for LC models . See Section 8.1 for pin selection infor mation. To delay the motor until
the drive receives a Start Unit command, enable the Enable Remote Motor Start option on the J2 connector on
LW models or on the backplane for LC models.
6.2.3 12 V - Current profile
Figure 2, 4 and 6 identify th e drive +1 2 V cur rent prof iles an d fig ures 3, 5 and 7 identi fy the dr ive +5 V curren t
profiles. The current during the various times is as shown:
T0 - Power is applied to the drive.
T1 - Controller self tests are performed.
T2 - Spindle begins to accelerate under current limiting after performing drive internal diagnostics. See
Note 1 of Table 2.
T3 - The spindle is up to speed and the head-arm restraint is unlocked.
T4 - The adaptive servo calibration sequence is performed.
T5 - Calibration is complete and drive is ready for reading and writing.
Note. All times and currents are typical. See Table 2 for maximum current requirements.
Cheetah 10K.7 SCSI Product Manual, Rev. D 27

Figure 2. Typical ST3300007 drive +12 V current profile
Figure 3. Typical ST3300007 drive +5 V current profile
28 Cheetah 10K.7 SCSI Product Manual, Rev. D

Figure 4. Typical ST3146707 drive +12 V current profile
Figure 5. Typical ST3146707 drive +5 V current profile
Cheetah 10K.7 SCSI Product Manual, Rev. D 29

Figure 6. Typical ST373207 drive +12 V current profile
Figure 7. Typical ST373207 drive +5 V current profile
30 Cheetah 10K.7 SCSI Product Manual, Rev. D

6.3 Power dissipation
ST3300007
For drives using sing le-ended inter face circuits, typical p ower dissipation unde r idle conditions i s 10.14 watts
(34.60 BTUs per hour).
For drives using low voltage differential interface circuits, typical power dissipation under idle conditions is
10.14 watts (34.60 BTUs per hour).
To obtain operatin g power for typical r andom read operations, r efer to the following two I/O rate curves (se e
Figures 8 and 9). Loc ate th e typical I/O rate f or a driv e in y our sy st em on the ho ri zo ntal a xis and r ea d th e cor responding +5 volt curr ent, +12 volt current, and to tal watts on the vertical axis. To calculate BTUs per hour,
multiply watts by 3.4123.
ST3300007LC DC CURRENT/POWER vs THROUGHPUT (SE) Random 8 Block Reads
1.800
1.600
1.400
1.200
1.000
0.800
Amperes
0.600
0.400
0.200
0.000
0.0 50.0 100.0 150.0 200.0 250.0 300.0
I/Os per Second
18 . 00
16 . 00
14 . 00
12 . 00
10 . 00
8.00
6.00
4.00
2.00
0.00
5Volt A
12 V o l t A
Watts
Power (watts)
Figure 8. ST3300007 DC current and power vs. input/output operations per second (SE)
ST3300007LC DC CURRENT/POWER vs THROUGHPUT (LVD) Random 8 Block Reads
1.8 00
1.6 00
1.4 00
1.2 00
1.0 00
0.800
Amperes
0.600
0.400
0.200
0.000
0.0 50.0 100.0 150.0 200.0 250.0 300.0
18 . 00
16 . 00
14 . 00
12 . 00
10 . 00
8.00
6.00
4.00
2.00
0.00
5Volt A
12 V o l t A
Watts
Power (watts)
I/Os per Second
Figure 9. ST3300007 DC current and power vs. input/output operations per second (LVD)
Cheetah 10K.7 SCSI Product Manual, Rev. D 31

ST3146707
For drives using single-ended interface ci rcuits, typical power diss ipation under idle condi tions is 7.74 watts
(26.41 BTUs per hour).
For drives using low voltage differential interface circuits, typical power dissipation under idle conditions is 7.74
watts (26.41 BTUs per hour).
To obtain operatin g power for typical r andom read operations, r efer to the following two I/O rate curves ( see
Figures 8 and 9). Loc ate th e typical I/O rate f or a dr iv e in y our s y stem on the horizontal axi s and rea d the corresponding +5 volt curr ent, +12 volt current, and to tal watts on the vertical axis. To calculate BTUs per hour,
multiply watts by 3.4123.
ST3146707LC DC CURRENT/POWER vs THROUGHPUT (SE) Random 8 Block Reads
1.8 0 0
1.6 0 0
1.4 0 0
1.2 0 0
18 . 0 0
16 . 0 0
14 . 0 0
12 . 0 0
5Volt A
12 V o l t A
Watts
Power (watts)
1.0 0 0
0.800
Amperes
0.600
0.400
0.200
0.000
0.0 50.0 100.0 150.0 200.0 250.0 300.0
10 . 0 0
8.00
6.00
4.00
2.00
0.00
I/Os per Second
Figure 10. ST3146707 DC current and power vs. input/output operations per second (SE)
ST3146707LC DC CURRENT/POWER vs THROUGHPUT (LVD) Random 8 Block Reads
1.8 0 0
1.6 0 0
1.4 0 0
1.2 0 0
1.0 0 0
0.800
Amperes
0.600
18 .0 0
16 .0 0
14 .0 0
12 .0 0
10 .0 0
8.00
6.00
5Volt A
12 Vo lt A
Watts
Power (watts)
0.400
0.200
0.000
0.0 50.0 100.0 150.0 200.0 250.0 300.0
4.00
2.00
0.00
I/Os per Second
Figure 11. ST3146707 DC current and power vs. input/output operations per second (LVD)
32 Cheetah 10K.7 SCSI Product Manual, Rev. D

ST373207
For drives using single-ended interface circuits, typical power di ssipation under idle con ditions is 6.78 watts
(23.14 BTUs per hour).
For drives using low voltage differential interface circuits, typical power dissipation under idle conditions is 6.78
watts (23.14 BTUs per hour).
To obtain operatin g power for typical r andom read operations, r efer to the following two I/O rate curves (se e
Figures 8 and 9). Loc ate th e typical I/O rate f or a driv e in y our sy st em on the ho ri zo ntal a xis and r ea d th e cor responding +5 volt curr ent, +12 volt current, and to tal watts on the vertical axis. To calculate BTUs per hour,
multiply watts by 3.4123.
ST373207LC DC CURRENT/POWER vs THROUGHPUT (SE) Random 8 Block Reads
1.800
1.600
1.400
1.200
18 .0 0
16 .0 0
14 .0 0
12 .0 0
5Volt A
12 Vo lt A
Watts
Power (watts)
1.000
0.800
10 .0 0
8.00
Amperes
0.600
0.400
0.200
0.000
0.0 50.0 100.0 150.0 200.0 250.0 300.0
6.00
4.00
2.00
0.00
I/Os per Second
Figure 12. ST373207 DC current and power vs. input/output operations per second (SE)
ST373207LC DC CURRENT/POWER vs THROUGHPUT (LVD) Random 8 Block Reads
1.800
1.600
1.400
1.200
1.000
0.800
Amperes
0.600
18 .0 0
16 .0 0
14 .0 0
12 .0 0
10 .0 0
8.00
6.00
5Volt A
12 Vo lt A
Watts
Power (watts)
0.400
0.200
0.000
0.0 50.0 100.0 150.0 200.0 250.0 300.0
4.00
2.00
0.00
I/Os per Second
Figure 13. ST373207 DC current and power vs. input/output operations per second (LVD)
Cheetah 10K.7 SCSI Product Manual, Rev. D 33

6.4 Environmental limits
Temperature and humidity values experienced by the drive must be suc h that c ond ensati on does not oc cur on
any drive part. Altitude and atmospheric pressu re specifications are refer enced to a standard day at 58.7 °F
(14.8°C). Maximum wet bulb temperature is 82°F (28°C).
6.4.1 Temperature
a. Operating
The maximum allowable continuous or sustained HDA case temperature for the rated AFR is 122°F (50°C)
The maximum allowable HDA case temperature is 60°C. Occasional excursions of HDA case temperatures
above 122°F (50°C) or below 41°F (5°C) may occur without impact to specified AFR. Continual or sustained
operation at HDA case temperatures outside these limits may degrade AFR.
Provided the HDA case temperatures limits are met, the drive meets all specifications over a 41°F to 131°F
(5°C to 55°C) drive ambient temperatu re range with a maximum temper ature gradient of 36°F (20°C) per
hour. Air flow may be needed in the drive enclosure to keep within this range (see Section 8.3). Operation at
HDA case temperatures outside this range may adversely affect the drives ability to meet specifications. To
confirm that the require d cooling for the electronic s and HDA case is provided, pla ce the drive in its final
mechanical configurati on, perform random w rite/read operations and measure the HDA case tem perature
after it has stabilized.
b. Non-operating
–40° to 158°F (–40° to 70°C) package ambient with a maxim um gradient of 36°F (20°C) per hour. This
specification assumes that the drive is packaged in the shipping container designed by Seagate for use with
drive.
HDA Temp.
Check Point
Figure 14. Location of the HDA temperature check point
1.0"
.5"
6.4.2 Relative humidity
The values below assume that no condensation on the drive occurs.
a. Operating
5% to 95% non-condensing relative humidity with a maximum gradient of 20% per hour.
b. Non-operating
5% to 95% non-condensing relative humidity.
6.4.3 Effective altitude (sea level)
a. Operating
–1,000 to +10,000 feet (–305 to +3,048 meters)
b. Non-operating
–1,000 to +40,000 feet (–305 to +12,210 meters)
34 Cheetah 10K.7 SCSI Product Manual, Rev. D

6.4.4 Shock and vibration
Shock and vibration lim its specifie d in this docum ent are measur ed directl y on the driv e chassis . If the drive is
installed in an e nclosure to which the stated shock and/or vibra tion cri teria is ap plied, reson ances may occur
internally to the enclosure resulting in drive movement in excess of the stated limits. If this situation is apparent,
it may be necessary to modify the enclosure to minimize drive movement.
The limits of shock and vibr ation define d within this doc ument are spec ified with the d rive mounted by any of
the four methods show n i n Fig ur e 1 5, a nd i n a ccor da nc e with the restrictions of S ect ion 8.4 . O r ien tation o f th e
side nearest the LED may be up or down.
6.4.4.1 Shock
a. Operating—normal
The drive, as installed for normal operation, shall operate error free while subjected to intermittent shock not
exceeding 15 Gs at a maximum duration of 11 msec (half sinewave). The drive, as ins talled for n ormal
operation, shall operate error free while subjected to intermittent shock not exceeding 60 Gs at a maximum
duration of 2 msec (half sinewave). Shock may be applied in the X, Y, or Z axis.
b. Operating—abnormal
Equipment, as installed for norma l operation, does not inc ur physical damage while subj ected to intermittent shock not exceedi ng 40 Gs at a maximum duratio n of 11 msec (half sinewave). Shock occurring a t
abnormal levels may promote degraded operational performance during the abnormal shock period. Specified operational performance will continue when normal operating shock levels resume. Shock may be
applied in the X, Y, or Z axis. Shock is not to be repeated more than two times per second.
c. Non-operating
The limits of non-operating shock shall apply to all c onditions of handl ing and transpo rtation. This inc ludes
both isolated drives and integrated drives.
The drive subjected to nonrepetitive sh ock not exceeding 7 5 Gs at a maximu m duration of 11 msec (half
sinewave) shall n ot exh ibit dev ice d amage or pe rformanc e deg radation . Sh ock may be ap plied in the X, Y,
or Z axis.
The drive subjected to no nrepetitive shock n ot exceeding 225 Gs at a maxi mum duration of 2 msec (hal f
sinewave) does not exhibi t device dam age or pe rforman ce degr adati on. Shock m ay be appl ied in th e X, Y,
or Z axis.
The drive subjected to non repetiti ve shock not excee ding 120 Gs at a ma ximu m duration of 0.5 mse c (half
sinewave) does not exhibi t device dam age or pe rforman ce degr adati on. Shock m ay be appl ied in th e X, Y,
or Z axis.
d. Packaged
Disc drives shipped as loose load (no t palletized) g eneral frei ght will b e packaged to w ithstand drops f rom
heights as defined below. For additional details refer to Seagate specifications 30190-001 (under 100 lbs/45
kg) or 30191-001 (over 100 lbs/45 Kg).
Package size Packaged/product weight Drop height
<600 cu in (<9,800 cu cm) Any 60 in (1524 mm)
600-1800 cu in (9,800-19,700 cu cm) 0-20 lb (0 to 9.1 kg) 48 in (1219 mm)
>1800 cu in (>19,700 cu cm) 0-20 lb (0 to 9.1 kg) 42 in (1067 mm)
>600 cu in (>9,800 cu cm) 20-40 lb (9.1 to 18.1 kg) 36 in (914 mm)
Drives packaged in single or mul tipacks with a gross weight of 20 pounds (8.95 k g) or less by Se agate for
general freight ship ment shal l withstand a drop t est from 48 inches (1, 070 mm) aga inst a co ncrete floor or
equivalent.
Cheetah 10K.7 SCSI Product Manual, Rev. D 35

Z
Y
X
Figure 15. Recommended mounting
X
Y
Z
36 Cheetah 10K.7 SCSI Product Manual, Rev. D

6.4.4.2 Vibration
a. Operating - normal
The drive as installed for normal ope ration, shall comply with the complete specif ied performance while
subjected to continuous vibration not exceeding
5-500 Hz @ 1.0 G (zero to peak)
Vibration may be applied in the X, Y, or Z axis.
Operating normal translational random flat profile
10 - 400 Hz 0.5 GRMS
b. Operating - abnormal
The drive as installed for normal operation shall not incur physical damage while subjected to periodic
vibration not exceeding:
15 minutes of duration at major resonant frequency
5-500 Hz @ 1.5 G (X, Y, or Z axis, zero to peak)
Vibration occurring at these levels may degrade operational performa nce during the abnormal vibration
period. Specified operational performance will continue when normal operating vibration levels are
resumed.
Operating abnormal translational random flat profile
10 - 400 Hz 1.2 GRMS
c. Non-operating
The limits of non-operating vibration shall apply to all conditions of handling and transportation. This
includes both isolated drives and integrated drives.
The drive shall not i ncur ph ysi cal da mage o r degrad ed per forma nce a s a res ult of c ontinu ous vib ratio n not
exceeding
5-22 Hz @ 0.040 inches (1.02 mm) displacement (zero to peak)
22-500 Hz @ 3.00 G
Vibration may be applied in the X, Y, or Z axis.
Non-operating translational random flat profile
10 - 400 Hz 1.2 GRMS
6.4.5 Air cleanliness
The drive is designed to operate in a typical office environment with minimal environmental control.
6.4.6 Corrosive environment
Seagate electronic driv e components pass accelerated corr osion testing equivalent to 10 ye ars exposure to
light industrial envir onments containi ng sulfuro us gases, chlorine an d nitric oxide , classes G and H per ASTM
B845. However, this accelerated testing cannot duplicate every potential application environment.
Users should use cauti on exposing any ele ctronic compo nents to uncontrolled chem ical pollutants and corr osive chemicals as electronic drive component reliability can be affected by the installation environment. The silver, copper, nic kel and gold film s used i n Seagate products are espec iall y sensit ive to the pr esen ce of sulf ide,
chloride, and nitrate contaminants. Sulfur is found to be the most damaging. In addition, electronic components
should never be ex pose d to c ondensin g water on the surfac e of th e pri nted cir cuit bo ard a ssembly (PCBA ) or
exposed to an ambient relative humidity greater than 95%. Materials used in cabinet fabrication, such as vulcanized rubber, that can outgas corr osive compoun ds should be m inimized or e liminated. Th e useful life of any
electronic equipment may be extended by replacing materials near circuitry with sulfide-free alternatives.
Cheetah 10K.7 SCSI Product Manual, Rev. D 37

6.4.7 Acoustics
Sound power during idle mode shall be 3.3 bels typic al, or bette r, when measured to ISO 777 9 specifi cation.
There will not be a ny discrete to nes more than 1 0 dB above the masking noise on typical drives when m easured according to Sea gate specificat ion 30553-001 . There will not be a ny tones more than 24 dB above the
masking noise on any drive.
6.4.8 Electromagnetic susceptibility
See Section 2.1.2.
6.5 Mechanical specifications
The following nominal di men sion s ar e exc lus ive of the decorative front panel acces sor y. However, dimensions
of the front panel are sho wn in figure below. Refer to Figures 16 a nd 17 for detailed mounting c onfiguration
dimensions. See Section 8.4, “Drive mounti ng. ”
Height: 1.000 in 25.4 mm
Width: 4.000 in 101.6 mm
Depth: 5.75 in 146.05 mm
Weight: 1.6 pounds 0.72 6 kilog ra ms
38 Cheetah 10K.7 SCSI Product Manual, Rev. D

-Z-
K
S
-Z-T//
A
M
[1]
L
H
B
R
-X-
V
C
-Z-
J
Notes:
[1]
Mounting holes are 6-32 UNC 2B, three
on each side and four on the bottom.
Max screw penetration into side of drive
is 0.15 in. (3.81 mm). Max screw
tightening torque is 6.0 in-lb (0.678 nm)
with minimum full thread engagement of
0.12 in. (3.05 mm).
-X-U
P
F
[1]
E
D
-X-
Figure 16. LW mounting confi gurati on dimen sion s
Dimension Table
Inches
1.028
5.787
4.000
3.750
.125
1.750
1.122
4.000
.250
1.638
.181
1.625
1.816
.315
.015
.015
.265
max
max
+/- .010
+/- .010
+/- .010
+/- .010
+/- .020
+/- .010
+/- .010
+/- .010
+/- .020
+/- .020
+/- .010
+/- .010
max
max
+/- .010
A
B
C
D
E
F
H
J
K
L
M
P
R
S
T
U
V
Millimeters
26.10
147.00
101.60
95.25
3.18
44.45
28.50
101.60
6.35
41.60
4.60
41.28
46.13
8.00
0.38
0.38
6.73
max
max
+/- .25
+/- .25
+/- .25
+/- .25
+/- .50
+/- .25
+/- .25
+/- .25
+/- .50
+/- .50
+/- .25
+/- .25
max
max
+/- .25
Cheetah 10K.7 SCSI Product Manual, Rev. D 39

K
S
-Z-T//
A
-ZM
-X-
U
P
F
[1]
[1]
L
H
B
C
R
-Z- -X-N
-Z-
J
Notes:
[1]
Mounting holes are 6-32 UNC 2B, three
on each side and four on the bottom.
Max screw penetration into side of drive
is 0.15 in. (3.81 mm). Max screw
tightening torque is 6.0 in-lb (0.678 nm)
with minimum full thread engagement of
0.12 in. (3.05 mm).
Dimension Table
Inches
1.028
5.787
4.000
3.750
.125
1.750
1.122
4.000
.250
1.638
.181
.040
1.625
2.469
.276
.015
.015
max
max
+/- .010
+/- .010
+/- .010
+/- .010
+/- .020
+/- .010
+/- .010
+/- .010
+/- .020
max
+/- .020
+/- .020
+/- .040
max
max
A
B
C
D
E
F
H
J
K
L
M
N
P
R
S
T
U
Millimeters
26.10
147.00
101.60
95.25
3.18
44.45
28.50
101.60
6.35
41.60
4.60
1.20
41.28
62.71
7.00
0.38
0.38
max
max
+/- .25
+/- .25
+/- .25
+/- .25
+/- .50
+/- .25
+/- .25
+/- .25
+/- .50
max
+/- .50
+/- .50
+/- 1.02
max
max
E
D
-X-
Figure 17. LC mounting configuration dimensions
40 Cheetah 10K.7 SCSI Product Manual, Rev. D

7.0 Defect and error management
The drive, as delivered, complies with this specification. The read error rate and specified storage capacity are
not dependent upon use of defect management routines by the host (initiator).
Defect and error mana gement in the SCSI system invol ves the drive internal defect/err or management and
SCSI systems error co nsiderations (errors in c omm uni ca tio ns betw een Ini tiat o r and the dr iv e). Tools for use in
designing a defect/error management plan are briefly outl in ed in this s ect ion , with references to other sections
where further details are given.
7.1 Drive internal defects
During the initial drive format operation at the factor y, media defects are identified, tagged as being unusable ,
and their locations rec orded on the drive prima ry defects list (referred to as the “ P” list and also as the ETF
defect list). At factory format time, these known defects are also reallocated, that is, reassigned to a new place
on the medium and the lo cation listed in the defects reallocat ion table. The “P” list is n ot altered after factory
formatting. Locations of defects found and reallocated duri ng error recovery p rocedures after drive shipment
are listed in the “G” list (d efects growth list) . The “P” and “G ” lists may be refe renced by the in itiator u sing the
Read Defect Data command (see the SCSI Interface Product Manual).
7.2 Drive error recovery procedures
Whenever an error occ urs during drive ope ration, the drive, if p rogrammed to do so , performs error re covery
procedures to att empt to recov er the data. T he error recovery procedures used depend o n the option s previously set up in the error recovery parameters mode page. Error recovery and defect management may involve
the use of several SCSI comman ds, the details of which ar e described in the SCSI Interface P roduct Manual .
The drive implements selectable error recovery time limits such as are required in video applications. For additional information on this, refer to the Er ror Recovery Page table in the SCS I Interfa ce P roduct M anual , which
describes the Mode Select/Mode Sense Error Recovery parameters.
The error recovery scheme supported by the drive provides a means to control the total error recovery time for
the entire command in addition to controlling the recovery level for a single LBA. The total amount of time spent
in error recovery for a com mand can be limited via t he Re co ve ry Time Limit by tes i n the Err or Recov er y Mode
Page. The total amount of time s pent in error recovery for a single LBA ca n be limited via the Read Retry
Count or Write Retry Count bytes in the Error Recovery Mode Page.
The drive firmware error recovery algorithms consist of 11 levels for read recoveries and 5 levels for writes.
Table 3 equates the R ead and Write Retry Co unt with th e maximu m pos sible rec overy time f or read and writ e
recovery of individual LBAs. The times given do not include time taken to perform reallocations, if reallocations
are performed. Reallocations are performed when the ARRE bit (for reads) or AWRE bit (for writes) is one, the
RC bit is zero, and the Recovery Time Limit for the command has not ye t been met. Time needed to perform
reallocation is not counted against the Recovery Time Limit.
The Read Continuous (RC) bit, when s et to one, requ ests the disc drive to tra nsfer the requested da ta length
without adding delay s (for retries or ECC correcti on) that may be required to in sure data integrity. The disc
drive may send erro neous data in order to maintain the c ontinuous flow of data. The RC bit shou ld only be
Cheetah 10K.7 SCSI Product Manual, Rev. D 41

used when data integrity is not a concern and s peed is of utmost im portance. If the Recovery Time Limit or
retry count is reached duri ng error recovery, the state of the RC bit is examined. If the RC bit is set, the drive
will transfer the unreco vered data with n o error indicatio n and co ntinue to execu te the remai ning command . If
the RC bit is not set, the drive will st op data transfer with the last good LBA, and report a “Check Condition ,
Unrecovered Read Error.”
42 Cheetah 10K.7 SCSI Product Manual, Rev. D

Table 3: Read and write retry count maximum recovery times [1]
Read retry
count [1]
0 77.7 0 35.9
1 89.7 1 53.8
2 305.0 2 83.7
3 352.8 3 101.7
4 400.7 4 179.4
5 418.6 5 424.6 (default)
6 466.4
7586.0
8675.7
9 723.5
10 777.3
11 1,064.4
12 1,877.7 (default)
Maximum recovery time
per LBA (cumulative, msec)
Write retry
count
Maximum recovery time
per LBA (cumulative, msec)
[1] These values are subject to change.
Setting these ret ry counts to a value bel ow the default settin g could result in an increased un recovered
error rate which may exceed the value g iven in thi s product man ual. A s etting of zero (0) wil l result in th e
drive not performing error recovery.
For example, suppose th e Read/Write Recovery page has the RC bit set to 0, read retr y count set to 4,
and the recovery ti me li mit fiel d (Mode Se nse page 01, bytes 10 a nd 11) set to FF FF hex (m aximu m). A
four LBA Read command i s allowe d to take up to 400.7 m sec rec overy time for each of the four LBAs in
the command. If the recovery time limit is set to 00 C8 hex (200 msec decimal) a four LBA read command
is allowed to take up to 200 m sec for all error recove ry within that command. T he use of the Recovery
Time Limit field allows finer g ranularity on control o f the time spent in err or recovery. The recovery time
limit only starts counting when the drive is executing error recovery and it restarts on each command .
Therefore, each command’s total recovery time is subject to the recovery time limit. Note: A recovery time
limit of 0 will use the drive’s default value of FF FF. Minimum recovery time limit is achieved by setting the
Recovery Time Limit field to 00 01.
7.3 SCSI systems errors
Information on the reporting of op erational errors or faults across the interface is given in the SCSI Inte rface
Product Manual. Mess age Prot ocol S yste m is de scrib ed in the SCSI In terface P roduct M anual. S everal of th e
messages are used in the SCSI sy stems error management system. The Requ est Sense command returns
information to the host about num erous kinds of errors or faults. The Recei ve Diagnostic Results reports the
results of diagnostic operations performed by the drive.
Status returned by the drive to the Initiator is desc r ib ed in the SC SI In ter fac e Prod uc t Man ual . Status reporting
plays a role in the SCSI s yste ms err or manage men t and i ts use in that r espect i s des cribed in sec tions wh ere
the various commands are discussed.
Cheetah 10K.7 SCSI Product Manual, Rev. D 43

7.4 Background Media Scan
Background Media Scan (BG MS) is a self-i nitiated medi a scan. It performs seq uential rea ds across the entir e
pack of the media while the drive is idle. In RAID arrays, BGMS allows hot spare drives to be scanned for
defects prior to being put into service by the host system. On regualr duty drives, if the host system makes use
of the BGMS Log Page, it can avoid placing data in sus pect locations on the med ia. Unrecovered er ror sites
found during BGMS will be logge d and recovered error sites will be logged or reallocated per ARRE/AWRE
settings.
With BGMS, the host system ca n consume less power and system overhea d by only checking BGMS sta tus/
results rather than tying up the bus and consuming power in the process of host-initiated media scanning activity.
Since the background scan functions are only done during idl e periods, BGMS caus es a negligible impact to
system performanc e. Backgr ound me dia sc an will begi n after 500m s of idle time. O ther featur es that n ormally
use idle time to function will function norma lly because BGMS fun ctions for bursts of 800ms and then suspends activity to allow other background functions to operate. Additionally , BGMS operates in segments of 400
block reads, checking for host commands upon completion of each of the block segments.
The BGMS function will compl ete any BGM S-initiate d error reco very prior to returning to ser vice host- initiate d
commands. Overhead associated with a return to host-servicing activity from BGMS only impacts the first command that interrupted BGMS. This results in a typical delay of about 4 ms.
7.4.1 Media Pre-Scan
Media Pre-Scan is an optional feature that allows the drive to handle unrecovered media errors that would otherwise have been found by the host system during critic al data accesses early in the integrati on process at
customer sites. Thi s should reduce integration DP PM (defective parts per mi llion) by identi fying and repair ing
media errors that aros e during shipping and handling . Media Pre-Scan repla ces all host-initiated Write commands with Write-Verify commands when the drive is accessi ng areas of the media yet untouched by BG MSinitiated scanning activity.
The drive will attempt to run BGM S on the en tire pack of the dr ive. Thi s will re sult i n incr easi ngly lar ge por tion
so fthe drive having been accesed, provided there is adequate idle time to allow BGMS to run. During the PreScan period, all Write commands that are in un-BGMS-scanned areas are converted to Write-Verify commands. To expedit e the scan of the full pack and the subsequent y exit from the Pre-Scan per iod, BGMS will
begin immediately when the drive g oes to idle du ring the Pre-S can perio d, as oppo sed to wai ting 500m s as is
done under non-Pre-Scan conditions.
44 Cheetah 10K.7 SCSI Product Manual, Rev. D

8.0 Installation
Note. These driv es are designed to be used only on single-ended (SE) or low voltage differen tial (LVD)
busses. Do not install these drives on a high voltage differential (HVD) bus.
The first thing to do when installing a drive is to set the drive SCSI ID and set up certain operating options. This
is usually done by installing sm all shorting jumpers on the pins of c onnectors J2 and J6 on the P CBA (or J5Auxiliary on the L W model), or via the drive to host I/O signals on the LC model. Some users connect cables to
J6 or J5-Auxiliary and perform the set-up using remote switches.
Configure drive options
For option jumper locations and definitions refer to Figures 18, 19, and 20. Dr ive de faul t mod e param eters are
not normally needed for installation. Refer to Section 9.3.2 for default mode parameters if they are needed.
• Ensure that the SCSI ID of the driv e is not the same as the host adapter. Most host adapters use SCS I ID 7
because ID 7 is the highest priority on both 8 and 16 bit data buses.
• If multiple devices are on the bus set the drive SCSI ID to one that is not presently used by other devices on
the bus.
• If the drive is the only device on the bus, attach it to the end of the SCSI bus cable. The user, system integrator, or host equipment manufacturer must provide external terminators.
Note. For additional information about terminator requirements, refer to Sections 9.8 and 9.9.
• Set all appropriate option jumpers for de sired operation prior to power on. If jumpers are changed after
power has been applied, recycle the drive power to make the new settings effective.
• Installation instructions are provided by host system documentation or with any additionally purchased drive
installation software. If necessary see Section 10 for Seagate support services telephone numbers.
• Do not remove the manufa cturer’s installed labels from the dr ive and d o not cover with ad dit ional labe ls, as
the manufacturer labels contain information required when servicing the product.
Formatting
Drives are shipped from the factory low level formatted with 512 byte sectors.
8.1 Drive ID/option select header
Figures 18 and 19 show vie ws of the drive ID select jumper connector s. Figure 20 shows the option select
jumper connector for al l models. Figure 18 sh ows the drive’s J5-auxiliar y jumper connector. Both J5-auxilia ry
and J6 have pins for selecting drive ID and for connecting the remote LED cable. Only one or the other should
be used, although using bot h at the same time would not damag e the drive. The notes following the figures
describe the functions of the various jumper positio ns on the connectors J2, J5- Auxiliary and J6. Sugge sted
part number for the jumpers used on J2 is Molex 52747-0211 (Seagate part number 77679052). A bag with the
two jumper plug types is shipped with the standard OEM drives.
Cheetah 10K.7 SCSI Product Manual, Rev. D 45

[4]
Host
Alternate
Usage Plug
Drive
Front
SCSI ID = 0
SCSI ID = 1
SCSI ID = 2
SCSI ID = 3
SCSI ID = 4
SCSI ID = 5
SCSI ID = 6
SCSI ID = 7
SCSI ID = 8
SCSI ID = 9
SCSI ID = 10
SCSI ID = 11
SCSI ID = 12
SCSI ID = 13
SCSI ID = 14
SCSI ID = 15
J6 [1]
Reserved
L
R
E
E
A3A2A
D
S
11 9 7 5 3 1
1
Pin 1
A
0
(default)
[2]
Shipped with cover installed.
Do not install jumpers;
retain cover.
2
+5V
Ground
[6]
Drive Activity LED
[4]
Dashed area is optional host circuitry (external to the
drive) connected to host supplied optional usage plug.
[5]
Do not connect anything to pins 13-20.
Figure 18. J6 jumper header
46 Cheetah 10K.7 SCSI Product Manual, Rev. D

Drive HDA (rear view, PCB facing downward)
68 Pin
SCSI I/O Connector
J1
[4]
Pin 1
+5V Ground
J5
Pin 1
SCSI ID = 0 (default)
SCSI ID = 1
SCSI ID = 2
SCSI ID = 3
SCSI ID = 4
SCSI ID = 5
SCSI ID = 6
SCSI ID = 7
SCSI ID = 8
SCSI ID = 9
SCSI ID = 10
SCSI ID = 11
SCSI ID = 12
SCSI ID = 13
SCSI ID = 14
SCSI ID = 15
A3A2A
A
1
Reserved
[4]
Host
Alternate
Usage Plug
+5V
Dashed area is optional host circuitry (external to the
drive) connected to host supplied optional usage plug.
N.C.
+5V
N.C.
Ground
Drive Activity LED
1197531
12 10 8 6 4 2
0
A0A1A2A
[1]
1P2P3P4P
J1-DC Power
For ID selection use
jumpers as shown or
connect a cable for
remote switching as
shown below.
Pins 1, 3, 5, and 7 are
optional connections to
switching circuits in host
equipment to establish
drive ID.
3
Remote Switches
Pins 2, 4, 6, and 8 are
normally not grounded.
They are driven low (ground)
for 250 ms after a Reset
or PWR ON to allow drive to
read SCSI ID selected.
PCB
Figure 19. J5 jumper header (on LW models only)
Cheetah 10K.7 SCSI Product Manual, Rev. D 47

*Additional notes on these
functions in section 8.1.2.
J2
Jumper Plug
(enlarged to
show detail)
Jumper
Positions
Force single-ended bus mode
Delay Motor Start
Enable Remote Motor Start
Write Protect
Parity Disable
Reserved
Term. Power to SCSI Bus
J6
Drive
Front
SEDSMEWPP
Figure 20. J2 option select header (on LW models only)
J2
J2
Pin 1
R
R
E
EST
D
S
P
[2]
(applies to LW models only;
reserved on LC models)
[3]
8.1.1 Notes for Figures 18, 19, and 20.
[1] Notes explaining the fun ctions of the various jumpe rs on jumper header connectors J2, J5, and J6 are
given here and in S ection 8 .1.2. The ter m “default” mea ns as standard O EM units are configure d with a
jumper on those pos itions when s hipped from facto ry. “Off” means no jumper is installed; “O n” means a
jumper is installed. OFF or ON underlined is factory default condition.
The PCBA on LC models does not have connector J 5. The J5 connector sign als conform to SFF-8009
Revision 2.0, Unitized Connector for Cabled Drives, signal assignments for auxiliary connectors.
[2] These signals are also on 80-pin J1 I/O connector. See tables 16 and 17, note 9.
[3] Voltage supplied by the drive.
[4] Dashed area is optional host circuitry (external to the drive) connected to host sup plied optional usage
plug.
[5] Do not connect anything to J5 pins 9, 11-12 or J6 pins 13-20.
[6] Connect an external Drive Activity LED to J6 pins 11 and 12 (see Figure 18), or to J5 pin 8 (see Figure 19)
and the drives +5 V power so urce, through an appropr iately size d current li miting resis tor. The drive pro-
vides an internal 150 ohm current limiting resistor for the J6 connection.
48 Cheetah 10K.7 SCSI Product Manual, Rev. D

8.1.2 Function description
J2
jumper
installation Jumper function description
SE
On Forces drive to use single-ended I/O drivers/receivers only.
Off Drive can operate on the interface in low voltage differential mode or single-ended, depend-
ing on the voltage state of the I/O “DIFFSNS” line. Default is SE jumper not installed.
DS ME
Off
Off Spindle starts immediately after power up - Default setting.
Off On Drive spindle does not start until Start Unit command received from host.
On Off Spindle Startup is delayed by SCSI ID times 12 seconds after power is applied, i.e., drive 0
spindle starts immediately when DC power connected, drive 1 starts after 12 second delay,
drive 2 starts after 24 second delay, etc.
On On Drive spindle starts when Start Unit command received from host. Delayed start feature is
overridden and does not apply when ME jumper is installed.
WP
On Entire drive is write protected.
Off
Drive is not write protected. Default is WP jumper not installed.
PD
On Parity checking and parity error reporting by the drive is disabled.
Off
Drive checks for parity and reports result of parity checking to host.
Default is PD jumper not installed.
RES
Off
Reserved jumper position. Default is no RES jumper installed.
TP
Off The drive does not supply terminator power to external terminators or to the SCSI bus I/O
cable.
On Drive supplies power to SCSI bus I/O cable. When drives have differential I/O circuits, a
jumper on the TP position may be needed to power external terminators (see system documentation). These drives do not have terminator circuits on the drive.
Note. J2 does not exist on LC models and is supported on LW models only.
Cheetah 10K.7 SCSI Product Manual, Rev. D 49

8.2 Drive orientation
The balanced rotary arm actuator design of the drive allows it to be mounted in any orientation. All drive performance characterization, however, has been done with the drive in horizontal (discs level) and vertical (drive on
its side) orientations, and these are the two preferred mounting orientations.
8.3 Cooling
The host enclosure must di ss ipate he at fr om the drive . You should confirm that the host enclo sure is designed
to ensure that the drive operates within the temperature measurement guidelines described in Section 6.4.1. In
some cases, forced airf low may be required to keep tem peratures at or below the tempe ratures specified in
Section 6.4.1.
If forced air is nece ssary, possible air-flow patterns are s hown in Figur e 21. The air -flow patterns are c reated
by fans either forcing or dra wing air as show n in the illustr ations. Conduction, c onvection, or other forced airflow patterns are acceptable as long as the temperature measurement guidelines of Section 6.4.1 are met.
Note. Air flows in the direction shown (back to front)
or in reverse direction (front to back)
Note. Air flows in the direction shown or
in reverse direction (side to side)
Figure 21. Air flow (suggested)
Above unit
Under unit
Above unit
Under unit
50 Cheetah 10K.7 SCSI Product Manual, Rev. D

8.4 Drive mounting
When mounting the drive using the bottom holes (x-y plane in Figure 15) care must be taken to ensure that the
drive is not physically distorted d ue to a stiff non-fl at mounting surface . The allowable mounting surface
stiffness is 80 lb/in ( 14 .0 N/mm ) . Th e fo llowi ng equ ati on and para gr aph d efi ne the al lo wable mounting surface
stiffness:
k * x = F < 15lb = 67N
where ‘k’ represents the mounting surface stiffness (units of lb/in or N/mm), and ‘x’ represents the out-of-plane
mounting surface di stortion (units of inches or m illimeters). The out-of-pla ne distortion (‘x’) is deter mined by
defining a plane with three of the four mounting poi nts fixed and evaluating the out-of-pla ne deflection of the
fourth mounting point when a known force (F) is applied to the fourth point.
Note. Before m ounting the drive in any kind of 3.5-inch to 5.2 5-inch adapter frame, ve rify that the drive
can meet the shock and vibration specifications give n herein while mounted in such an adapter
frame. Adapter frames that are available may not have a mechanical structure capable of mounting
the drive so that it can meet the shock and vibration specifications listed in this manual.
8.5 Grounding
Signal ground (PCB A) and HDA ground a re connected to gether in the drive an d cannot be separate d by the
user. The equipment in which the drive is mou nte d is co nnected directly to the HDA an d P C BA with no electrically isolating s hock mounts. If it is desired for the sy stem chassis to not be connected t o the HDA/PCBA
ground, the systems in tegrator or user must provide a nonconduc tive (elec trically is olating) m ethod of mou nting the drive in the host equipment.
Increased radiated em issions may res ult if you do not provid e the maximum su rface area ground conn ection
between system ground and drive ground. This is the system designer’s and integrator’s responsibility.
Cheetah 10K.7 SCSI Product Manual, Rev. D 51

52 Cheetah 10K.7 SCSI Product Manual, Rev. D

9.0 Interface requirements
This section partially describes the interface requirements as implemented on the drives.
9.1 General description
This section describes in essentially general terms the interface requirements supported by the Cheetah 10K.7
SCSI. No attempt is made to des cribe all of the mi nute details of con dition s and co nst raints that m ust be c onsidered by designers when designing a system in which this family of drives can properl y operate. Seagate
declares that the drives operate in accordance with the appropriate ANSI Standards referenced in various
places herein, with exceptions as noted herein or in the Seagate SCSI Interface Product Manual.
9.2 SCSI interface messages supported
Table 4 lists the mess ages supported by the SCSI-2 and SCSI -3 modes of the Cheetah 10K.7 SCSI family
drives.
Table 4: SCSI messages supported by Cheetah 10K.7 SCSI family drives
Message name Message code Supported
Abort 06h Y
Abort-tag 0Dh Y
Bus device reset 0Ch Y
Clear ACA 16h N
Clear queue 0Eh Y
Command complete 00h Y
Continue I/O process 12h N
Disconnect 04h Y
Extended messages 01h[1] Y
Identify 80h-FFh Y
Ignore wide residue (two bytes) 23h Y
Initiate recovery 0Fh N
Initiator detected error 05h Y
Linked command complete 0Ah Y
Linked command complete with flag 0Bh Y
Message parity error 09h Y
Message reject 07h Y
Modify da ta pointer [1] N
No operation 08h Y
Parallel Protocol Request Y
Queue tag messages (two bytes)
ACA 24h N
Head of queue tag 21h Y
Ordered queue tag 22h Y
Simple queue tag 20h Y
Cheetah 10K.7 SCSI Product Manual, Rev. D 53

Table 4: SCSI messages supported by Cheetah 10K.7 SCSI family drives (Continued)
Message name Message code Supported
Release recovery 10h N
Restore pointers 03h Y
Save data pointer 02h Y
Synchronous data transfer req. [1] Y
Target transfer disable 13h N
Terminate I/O process 11 h N
Wide data transfer request [1] Y
Notes.
[1] Extended messages (see the SCSI Interface Product Manual).
[2] Supports all options except qas_req and iu_req.
9.3 SCSI interface commands supported
Table 5 following lists the SCSI interface commands that are supported by the drive.
OEM standard drives are shipped set to operate in Ultra320 mode.
Table 5: Commands supported by Cheetah 10K.7 SCSI family drive
Command name Command code Supported
Change Definition 40h N
Compare 39h N
Copy 18h N
Copy and Verify 3Ah N
Format Unit [1] 04h Y
DPRY bit supported N
DCRT bit supported Y
STPF bit supported Y
IP bit supported Y
DSP bit supported Y
IMMED bit supported Y
VS (vendor specific) N
Inquiry 12h Y
Date Code page (C1h) Y
Device Behavior page (C3h) Y
Firmware Numbers page (C0h) Y
Implemented Operating Def page (81h) Y
Jumper Settings page (C2h) Y
Supported Vital Product Data page (00h) Y
Unit Serial Number page (80h) Y
Lock-unlock cache 36h N
Log Select 4Ch Y
PCR bit Y
DU bit N
54 Cheetah 10K.7 SCSI Product Manual, Rev. D

Table 5: Commands supported by Cheetah 10K.7 SCSI family drive (Continued)
Command name Command code Supported
DS bit Y
TSD bit Y
ETC bit N
TMC bit N
LP bit N
Log Sense 4Dh Y
Application Client Log page (0Fh) Y
Buffer Over-run/Under-run page (01h) N
Cache Statistics page (37h) Y
Factory Log page (3Eh) Y
Last n Deferred Errors or Asynchronous Events page (0Bh) N
Last n Error Events page (07h) N
Non-medium Error page (06h) Y
Pages Supported list (00h) Y
Read Error Counter page (03h) Y
Read Reverse Error Counter page (04h) N
Self-test Results page (10h) Y
Start-stop Cycle Counter page (0Eh) Y
Temperature page (0Dh) Y
Verify Error Counter page (05h) Y
Write error counter page (02h) Y
Mode Select (same pages as Mode Sense 1Ah) 15h Y [2]
Mode Select (10) (same pages as Mode Sense 1Ah) 55h Y
Mode Sense 1Ah Y [2]
Caching Parameters page (08h) Y
Control Mode page (0Ah) Y
Disconnect/Reconnect (02h) Y
Error Recovery page (01h) Y
Format page (03h) Y
Information Exceptions Control page (1Ch) Y
Notch and Partition Page (0Ch) N
Port Control Page (19h) Y
Power Condition page (1Ah) Y
Rigid Disc Drive Geometry page (04h) Y
Unit Attention page (00h) Y
Verify Error Recovery page (07h) Y
Xor Control page (10h) N
Mode Sense (10) (same pages as Mode Sense 1Ah) 5Ah Y
Prefetch 34h N
Cheetah 10K.7 SCSI Product Manual, Rev. D 55

Table 5: Commands supported by Cheetah 10K.7 SCSI family drive (Continued)
Command name Command code Supported
Read 08h Y
Read Buffer (modes 0, 2, 3, Ah and Bh supported) 3Ch Y
Read Capacity 25h Y
Read Defect Data (10) 37h Y
Read Defect Data (12) B7h Y
Read Extended 28h Y
DPO bit supported Y
FUA bit supported Y
Read Long 3Eh Y
Reassign Blocks 07h Y
Receive Diagnostic Results 1Ch Y
Supported Diagnostics pages (00h) Y
Translate page (40h) Y
Release 17h Y
Release (10) 57h Y
Report LUNS A0h Y
Request Sense 03h Y
Actual Retry Count bytes Y
Extended Sense Y
Field Pointer bytes Y
Reserve 16h Y
3rd Party Reserve Y
Extent Reservation N
Reserve (10) 56h Y
3rd Party Reserve Y
Extent Reservation N
Rezero Unit 01h Y
Search Data Equal 31h N
Search Data High 30h N
Search Data Low 32h N
Seek 0Bh Y
Seek Extended 2Bh Y
Send Diagnostics 1Dh Y
Supported Diagnostics pages (00h) Y
Translate page (40h) Y
Set Limits 33h N
Start Unit/Stop Unit (spindle ceases rotating) 1Bh Y
Synchronize Cache 35h Y
Test Unit Ready 00h Y
56 Cheetah 10K.7 SCSI Product Manual, Rev. D

Table 5: Commands supported by Cheetah 10K.7 SCSI family drive (Continued)
Command name Command code Supported
Verify 2Fh Y
BYTCHK bit Y
Write 0Ah Y
Write and Verify 2Eh Y
DPO bit Y
Write Buffer (modes 0, 2, supported) 3Bh Y
Firmware Download option
Y
(modes 5, 7, Ah and Bh supported) [3]
Write Extended 2Ah Y
DPO bit Y
FUA bit Y
Write Long 3Fh Y
Write Same 41h Y
PBdata N
LBdata N
XDRead 52h N
XDWrite 50h N
XPWrite 51h N
[1] The drive can format to any even number of bytes per sector from 512 to 528.
[2] Tables 7, 8, and 9 show how individual bits are set and which are changeable by the host.
[3] WARNING: A power loss during flash programm ing ca n re su lt i n fi rmwar e c orru pti on. This usually makes
the drive inoperable.
Cheetah 10K.7 SCSI Product Manual, Rev. D 57

Table 6 lists the Standard Inquiry command data that the drive should return to the initiator per the format given
in the SCSI Interface Product Manual, part number 75789509, Inquiry command section.
Table 6: Cheetah 10K.7 SCSI family drive Standard Inquiry data
Bytes Data (HEX)
0-15 00 00 [03]1[12]28B 00 01 3E 53 45 41 47 41 54 45 20 VENDOR ID
3
16-31 53 54 [33] [33] [30] [30] [30] [30] [37] [4C] [57]
32-47 R# R# R# R# S# S# S# S# S# S# S# S# 00 00 00 00
48-63 00 00 00 00 00 00 00 00 0F 00 00 00 00 00 00 00
64-79 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
80-95 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
96-111 00 43 6F 70 79 72 69 67 68 74 20 28 63 29 20 [Y] COPYRIGHT
4
112-127 [y] [y] [y]
128-143 72 69 67 68 74 73 20 72 65 73 65 72 76 65 64 20
1
03 means SCSI-3 (Ultra160) implemented.
[]
20 53 65 61 67 61 74 65 20 41 6C 6C 20 NOTICE
20 20 20 20 20 PRODUCT ID
Note. Seaga te has chosen to set this bit to 03, S CSI-3 (Ultra160) implem ented, rather than 04, SCSI- 4
(Ultra320) impleme nted, due to compatib ility issues with some host bus adapters. This setting will
not affect the Ultra320 functionality of the drive.
2
[]
The drive can be changed between these two configurations:
02 means response data in SCSI-2/SCSI-3 format.
12 means the drive uses the hierarchical addressing mode to assign LUNs to logical units (default is 12).
R# Four ASCII digits repr esenti ng the la st four d ig its of the pr odu ct Fir mwa re Rel ea se num ber. This informa-
tion is also given in th e Vital Product Data page C0h, together w ith servo RAM and RO M release numbers.
S# Eight ASCII digits representing the eight digits of the product serial number.
3
[]
Bytes 18 through 26 reflect model of drive. The table above shows the hex values for Model
ST3300007LW.
Refer to the values below for the values of bytes 18 through 26 of you particular model:
ST3300007LW 33 33 30 30 30 30 37 4C 57
ST3300007LC 33 33 30 30 30 30 37 4C 43
ST3146707LW 33 31 34 36 37 30 37 4C 57
ST3146707LC 33 31 34 36 37 30 37 4C 43
ST373207LW 33 37 33 32 30 37 4C 57 20
ST373207LC 33 37 33 32 30 37 4C 43 20
4
[]
Copyright Year - the year the drive’s firmware code was built.
9.3.1 Inquiry Vital Product data
Instead of the standard Inquiry data shown in Table 6, the initiator can request several Vital Product Data
pages by setting the Inquiry com mand EVPD bit to one. The SCSI Interface P roduct Manual lists the Vital
Product Data pages and describes the ir formats. A separate Inquiry command must be se nt to the drive for
each Vital Product Data page the initiator wants the drive to send back.
58 Cheetah 10K.7 SCSI Product Manual, Rev. D

9.3.2 Mode Sense data
The Mode Sense c ommand provides a means for th e drive to repor t its operating parame ters to the initi ator.
The drive maintains four sets of Mode parameters, Default values, Saved values, Current values and Changeable values.
Default values are har d coded i n the drive fi rmware that i s stored in flash EPROM nonvolat ile memor y on the
drive PCBA. Default values can be changed only by downloading a complete set of new firmware into the flash
EPROM. An initiator can request and receive from the drive a list of default value s and use those in a Mode
Select command to set up new current and saved values, where the values are changeable.
Saved values are stored on the disc me dia using a Mode Sel ect command. Only parameter values that are
allowed to be changed c an be chang ed by this meth od. See “Ch angeable v alues” defi ned below. Parameters
in the saved values list that are not changeable by the Mode Select command get their values from the default
values storage.
Current values are volat ile values currently being used by the dri ve to control its operation. A Mode Select
command can be us ed to chan ge these val ues (only those tha t are change able). O riginall y, they are installed
from saved or default values after a power on reset, hard reset, or Bus Device Reset message.
Changeable values form a bit mask, stored in nonvolatile memory, that dictates which of the current values and
saved values can be ch anged b y a Mo de Sel ect co mmand. A “on e” all ows a cha nge to a co rrespo nding b it; a
“zero” allows no change. For exa mple, in Tab le 7 refer to Mod e page 01, in the row entitled “CHG”. Thes e are
hex numbers representing the changeable values for mode page 01. Note that bytes 04, 05, 06, and 07 are not
changeable, becaus e those fie lds ar e all ze ros. If some c hangea ble cod e had a he x val ue EF, that equates to
the binary pattern 1110 1111. If there is a zero in any bit position in the field, it means that bit is not changeable.
Bits 7, 6, 5, 3, 2, 1, and 0 are changeable, because those bits are all ones. Bit 4 is not changeable.
Though the drive always reports non-zero values in by tes 00 an d 01, th os e particu lar by tes are never changeable.
The Changeable values list can only be changed by downloading new firmware into the flash EPROM.
On standard OEM drives the Saved values are taken from the default values list and stored into the saved val-
ues storage location on the media prior to shipping.
When a drive is powered up, it takes sav ed valu es from the medi a and store s them to th e cur rent va lues stor-
age in volatile memory . It is not possible to change the current values (or the saved values) with a Mode Select
command before the drive is up to speed and is “ready.” An attempt to do so results in a “Check Condition status being returned.
Note. Beca use th ere may be se vera l differen t versi ons of dr ive control firm ware in t he total po pulati on of
drives in the field, the Mode Sense values given in the following tables may not exactly match those
of some drives.
The following tables list the values of the data bytes returned by the drive in response to the Mode Sense command pages for SCSI Ultra160 implementation (see the SCSI Interface Product Manual).
Definitions:
DEF = Default value. St andard drives are shipped configured this way.
CHG= Changeable bits; indicates if current and saved values are changeable.
Note. Saved values for OEM drives are normally the same as the default values.
Cheetah 10K.7 SCSI Product Manual, Rev. D 59

Table 7: ST3300007 Mode sense data
MODE SENSE (10 BYTE) HEADER DATA
00 ae 00 10 00 00 00 08 22 ec b2 5c 00 00 02 00
MODE SENSE PAGES DATA
SAV 81 0a c0 0c ff 00 00 00 05 00 ff ff
DEF 81 0a c0 0c ff 00 00 00 05 00 ff ff
CHG 81 0a ff ff 00 00 00 00 ff 00 ff ff
SAV 82 0e 80 80 00 0a 00 00 00 00 00 00 00 00 00 00
DEF 82 0e 80 80 00 0a 00 00 00 00 00 00 00 00 00 00
CHG 82 0e ff ff 00 00 00 00 00 00 00 00 87 00 00 00
SAV 83 16 3b 18 00 00 00 28 00 00 03 29 02 00 00 01 01 10 00 78 40 00 00 00
DEF 83 16 3b 18 00 00 00 28 00 00 03 29 02 00 00 01 01 10 00 78 40 00 00 00
CHG 83 16 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
SAV 84 16 01 62 96 08 00 00 00 00 00 00 00 00 00 00 00 00 00 00 27 31 00 00
DEF 84 16 01 62 96 08 00 00 00 00 00 00 00 00 00 00 00 00 00 00 27 31 00 00
CHG 84 16 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
SAV 87 0a 00 0c ff 00 00 00 00 00 ff ff
DEF 87 0a 00 0c ff 00 00 00 00 00 ff ff
CHG 87 0a 0f ff 00 00 00 00 00 00 ff ff
SAV 88 12 14 00 ff ff 00 00 ff ff ff ff 00 20 00 00 00 00 00 00
DEF 88 12 14 00 ff ff 00 00 ff ff ff ff 00 20 00 00 00 00 00 00
CHG 88 12 b5 00 00 00 ff ff ff ff 00 00 a0 ff 00 00 00 00 00 00
SAV 8a 0a 02 00 00 00 00 00 00 00 15 f6
DEF 8a 0a 02 00 00 00 00 00 00 00 15 f6
CHG 8a 0a 03 f1 00 00 00 00 00 00 00 00
SAV 19 06 01 00 ff ff 00 00
DEF 19 06 01 00 ff ff 00 00
CHG 19 06 00 00 ff ff 00 00
SAV 9a 0a 00 02 00 00 00 05 00 00 00 04
DEF 9a 0a 00 02 00 00 00 05 00 00 00 04
CHG 9a 0a 00 03 ff ff ff ff 00 00 00 00
SAV 9c 0a 10 00 00 00 00 00 00 00 00 01
DEF 9c 0a 10 00 00 00 00 00 00 00 00 01
CHG 9c 0a 9d 0f ff ff ff ff ff ff ff ff
SAV 80 06 00 00 0f 00 00 00
DEF 80 06 00 00 0f 00 00 00
CHG 80 06 f7 40 0f 00 00 00
READ CAPACITY DATA
22 ec b2 5b 00 00 02 00
60 Cheetah 10K.7 SCSI Product Manual, Rev. D

Table 8: ST3146707 Mode sense data
MODE SENSE (10 BYTE) HEADER DATA
00 ae 00 10 00 00 00 08 11 17 73 30 00 00 02 00
MODE SENSE PAGES DATA
SAV 81 0a c0 0c ff 00 00 00 05 00 ff ff
DEF 81 0a c0 0c ff 00 00 00 05 00 ff ff
CHG 81 0a ff ff 00 00 00 00 ff 00 ff ff
SAV 82 0e 80 80 00 0a 00 00 00 00 00 00 00 00 00 00
DEF 82 0e 80 80 00 0a 00 00 00 00 00 00 00 00 00 00
CHG 82 0e ff ff 00 00 00 00 00 00 00 00 87 00 00 00
SAV 83 16 1d 8c 00 00 00 14 00 00 03 29 02 00 00 01 01 10 00 78 40 00 00 00
DEF 83 16 1d 8c 00 00 00 14 00 00 03 29 02 00 00 01 01 10 00 78 40 00 00 00
CHG 83 16 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
SAV 84 16 01 62 96 04 00 00 00 00 00 00 00 00 00 00 00 00 00 00 27 31 00 00
DEF 84 16 01 62 96 04 00 00 00 00 00 00 00 00 00 00 00 00 00 00 27 31 00 00
CHG 84 16 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
SAV 87 0a 00 0c ff 00 00 00 00 00 ff ff
DEF 87 0a 00 0c ff 00 00 00 00 00 ff ff
CHG 87 0a 0f ff 00 00 00 00 00 00 ff ff
SAV 88 12 14 00 ff ff 00 00 ff ff ff ff 00 20 00 00 00 00 00 00
DEF 88 12 14 00 ff ff 00 00 ff ff ff ff 00 20 00 00 00 00 00 00
CHG 88 12 b5 00 00 00 ff ff ff ff 00 00 a0 ff 00 00 00 00 00 00
SAV 8a 0a 02 00 00 00 00 00 00 00 0a a6
DEF 8a 0a 02 00 00 00 00 00 00 00 0a a6
CHG 8a 0a 03 f1 00 00 00 00 00 00 00 00
SAV 19 06 01 00 ff ff 00 00
DEF 19 06 01 00 ff ff 00 00
CHG 19 06 00 00 ff ff 00 00
SAV 9a 0a 00 02 00 00 00 05 00 00 00 04
DEF 9a 0a 00 02 00 00 00 05 00 00 00 04
CHG 9a 0a 00 03 ff ff ff ff 00 00 00 00
SAV 9c 0a 10 00 00 00 00 00 00 00 00 01
DEF 9c 0a 10 00 00 00 00 00 00 00 00 01
CHG 9c 0a 9d 0f ff ff ff ff ff ff ff ff
SAV 80 06 00 00 0f 00 00 00
DEF 80 06 00 00 0f 00 00 00
CHG 80 06 f7 40 0f 00 00 00
READ CAPACITY DATA
11 17 73 2f 00 00 02 00
Cheetah 10K.7 SCSI Product Manual, Rev. D 61

Table 9: ST373207 Mode sense data
MODE SENSE (10 BYTE) HEADER DATA
00 ae 00 10 00 00 00 08 08 8b b9 98 00 00 02 00
MODE SENSE PAGES DATA
SAV 81 0a c0 0c ff 00 00 00 05 00 ff ff
DEF 81 0a c0 0c ff 00 00 00 05 00 ff ff
CHG 81 0a ff ff 00 00 00 00 ff 00 ff ff
SAV 82 0e 80 80 00 0a 00 00 00 00 00 00 00 00 00 00
DEF 82 0e 80 80 00 0a 00 00 00 00 00 00 00 00 00 00
CHG 82 0e ff ff 00 00 00 00 00 00 00 00 87 00 00 00
SAV 83 16 0e c6 00 00 00 0a 00 00 03 29 02 00 00 01 01 74 00 78 40 00 00 00
DEF 83 16 0e c6 00 00 00 0a 00 00 03 29 02 00 00 01 01 74 00 78 40 00 00 00
CHG 83 16 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
SAV 84 16 01 62 96 02 00 00 00 00 00 00 00 00 00 00 00 00 00 00 27 31 00 00
DEF 84 16 01 62 96 02 00 00 00 00 00 00 00 00 00 00 00 00 00 00 27 31 00 00
CHG 84 16 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
SAV 87 0a 00 0c ff 00 00 00 00 00 ff ff
DEF 87 0a 00 0c ff 00 00 00 00 00 ff ff
CHG 87 0a 0f ff 00 00 00 00 00 00 ff ff
SAV 88 12 14 00 ff ff 00 00 ff ff ff ff 00 20 00 00 00 00 00 00
DEF 88 12 14 00 ff ff 00 00 ff ff ff ff 00 20 00 00 00 00 00 00
CHG 88 12 b5 00 00 00 ff ff ff ff 00 00 a0 ff 00 00 00 00 00 00
SAV 8a 0a 02 00 00 00 00 00 00 00 05 7d
DEF 8a 0a 02 00 00 00 00 00 00 00 05 7d
CHG 8a 0a 03 f1 00 00 00 00 00 00 00 00
SAV 19 06 01 00 ff ff 00 00
DEF 19 06 01 00 ff ff 00 00
CHG 19 06 00 00 ff ff 00 00
SAV 9a 0a 00 02 00 00 00 05 00 00 00 04
DEF 9a 0a 00 02 00 00 00 05 00 00 00 04
CHG 9a 0a 00 03 ff ff ff ff 00 00 00 00
SAV 9c 0a 10 00 00 00 00 00 00 00 00 01
DEF 9c 0a 10 00 00 00 00 00 00 00 00 01
CHG 9c 0a 9d 0f ff ff ff ff ff ff ff ff
SAV 80 06 00 00 0f 00 00 00
DEF 80 06 00 00 0f 00 00 00
CHG 80 06 f7 40 0f 00 00 00
READ CAPACITY DATA
08 8b b9 97 00 00 02 00
62 Cheetah 10K.7 SCSI Product Manual, Rev. D

9.4 SCSI bus conditions and miscellaneous features supported
Asynchronous SCSI bus cond itions supp orted by th e drive are li sted be low. These conditio ns ca use the SCSI
device to perform certain actions and can alter the SCS I bus phase sequenc e. Other mis cellan eous ope ratin g
features supported are also listed here. Refer to the SCSI Interface Product Manual for details.
Table 10: SCSI bus conditions and other miscellaneous features
Condition/feature supported by:
SCSI-2/SCSI-3 Conditions or feature
Y Adaptive Caching
Y Arbitrating System
Y Asynchronous Data Transfer
N Asynchronous Event Notification
Y Attention Condition
N Auto Contingent Allegiance Condition
Y Contingent Allegiance Condition
Y Deferred Error Handling
Y Disconnect/Reconnect
N High voltage differential (HVD) interface available
Y Low voltage d ifferential (LVD) interface available
Y Parameter Rounding (controlled by the Round bit in Mode Select page 0)
Y Queue tagging (up to 64 Queue tags supported)
Y Reporting actual retry count in Extended Sense bytes 15, 16 and 17.
Y Reset Condition
Y Segmented Caching
Y Synchronous Data Transfer
N Zero Latency Read
SCSI-2/SCSI-3 Status supported
YGood
Y Check Condition
Y Condition Met/Good
YBusy
Y Intermediate/Good
Y Intermedi ate/Condition Met/Good
Y Reservation Conflict
Y Queue Full
N ACA Active
Cheetah 10K.7 SCSI Product Manual, Rev. D 63

9.5 Synchronous data transfer
The data transfer period to be used by the drive and the initiator is established by an ex change of messa ges
during the Message P hase of operation. S ee the section on message protocol in the SCSI Interfac e Product
Manual, part number 75789509.
9.5.1 Synchronous data transfer periods supported
In the following tables, M is the synchronous period value (in the transfer rate negotiation message) that represents the associated transfer period and transfer rate values.
Table 11 lists the synchronous data transfer periods supported by the drive in DT DAT A phase. DT DA TA phase
is only allowed when using the LVD interface.
Table 11: Synchronous DT DATA transfer periods
M (decimal)
Transfer period
(nanoseconds)
Transfer rate
(megatransfers/second)
Transfer rate
(Mbytes/second) on wide bus
8 6.25 160.0 320.0
9 12.5 80.0 160.0
10 25 40.0 80.0
12 50 20.0 40.0
25 100 10.0 20.0
Table 12 lists the synchronous data transfer periods supported by the drive in ST DAT A phase. ST DA TA phase
is allowed with either LVD or SE interface except as noted.
Table 12: Synchronous ST DATA transfer periods
Transfer period
M (decimal)
(nanoseconds)
10 25 40.0
Transfer rate
(megatransfers/second)
1
12 50 20.0
25 100 10.0
50 200 5.0
1. This transfer rate is only allowed when using the LVD interface.
9.5.2 REQ/ACK offset
Cheetah 10K.7 SCSI family dr ives support RE Q/ACK offset values fr om 7 to 63 (3Fh) . Offsets of 1 through 6
are negotiated to 0 (asynchronous transfer).
9.6 Physical interface
This section describes the co nnectors, cables, signals, terminator s and bus timing of the DC and SCSI I/O
interface. See Section 9.8 and Section 9.9 for additional terminator information.
Figures 22 and 23 show the locations of the DC power connector, SCSI interface connector, drive select headers, and option select headers.
Details of the physi cal, electrical and logical cha racteristics are given in sectio ns following, while the SCSI
operational aspects of Seagate drive interfaces are given in the SCSI Interface Product Manual.
64 Cheetah 10K.7 SCSI Product Manual, Rev. D

9.6.1 DC cable and connector
LW model drive s receive DC po wer through a 4 -pin connec tor (see Fig ure 24 for pin as signmen t) mounted at
the rear of the main PCBA. Recommended part numbers of the mating connector are listed below, but equivalent parts may be used.
Type of cable Connector Contacts (20-14 AWG)
14 AWG MP 1-480424-0 AMP 60619-4 (Loose Piece)
AMP 61117-4 (Strip)
LC model drives receive power through the 80-pin I/O connector. See Tables 16 and 17.
Cheetah 10K.7 SCSI Product Manual, Rev. D 65

J1
Pin 1
Pin 1A
J1
Pin 1
68 Pin
SCSI I/O
Connector
J5
Pin
1P
2P
3P
4P
Pin 1P
J5
Pin 1A
J1-DC Power
Power
+12V
+12V ret
+ 5V ret
+ 5V
J1-DC Power
1P2P3P4P
PCB
J6
Figure 22. LW model drive physical interface (68-pin J1 SCSI I/O connector)
J6
Figure 23. LC model drive physical interface (80-pin J1 SCSI I/O connector)
66 Cheetah 10K.7 SCSI Product Manual, Rev. D

9.6.2 SCSI interface physical description
Cheetah 10K.7 SCSI drives support the physi cal interface requirements of the Ultra320 SCSI Parall el Interface-4 (SPI-4), and operate co mpatibly at the interface with devices that support earl ier SCSI-2 and SCSI-3
standards. It should be noted that t his is only true if the syste ms engineering has bee n correctly done, and if
earlier SCSI-2 and SCSI-3 devices respond in an acceptable manner (per applicable SCSI Standards) to reject
newer Ultra320 protocol extensions that they don’t support.
The drives documented in this manual support single-ended and low voltage differential physical interconnects
(hereafter referred to as SE and LVD, respectively) as described in the corresponding ANSI SPI document referenced in the precee ding paragraph. These drives implemen t driver and receiver circuits that can oper ate
either SE or LVD. However, they cannot switch dynamically between SE and LVD operation.
The drives typically operate on a bus with other SCSI devices. All devices on the bus must operate in the same
mode, either SE or LVD, but not a mixture of these. All signals on the bus are common between all devices on
the bus. This bus must be terminated at both ends with the proper impedance in order to operate correctly. Do
not terminate intermediate SCSI devices. In some cases, the SCSI devices at each end have onboard termination circuits that can be e nab led by in stallati on of a j umper plug (TE) on the d evice. T hese termin atio n circu its
receive power from either a source inte rnal to the dev i ce, or from a line in th e in te rface c abl e specifically powered for that purpose. LC and LW model drives do not have onboard termination circuits. Some type of external
termination circuits must be provided for these drives by the end user or designers of the equipment into which
the drives will be integrated. See the ANSI T10 Standard referenced above for the maximum number of
devices that can successfully operate at various interface transfer rates on SE and LVD buses.
LC model drives plug in to PCBA or bul khead con nector s in th e host. The y may b e conne cted in a daisy chai n
by the host backplane wiring or PCB A circu it runs that hav e adequ ate DC curren t carry ing capacity to support
the number of drives plug ged into the PCBA or bulkhead connec tors . A si ngle 80-pin I/O connector cabl e cannot support the DC current ne eds of several dr ives, so no cab les beyond the bul khead conne ctors should b e
used. A single drive connected via a cable to a host 80-pin I/O connector is not recommended.
Table 13 shows the interface transfer rates supported by the various drive models defined in this manual.
Cheetah 10K.7 SCSI Product Manual, Rev. D 67

Table 13: Interface transfer rates supported
Maximum transfer rate
Interface type/
drive models
Asynchronous
Fast-5 Fast-10
Fast-20
(Ultra)
Fast-40
(Ultra2)
Fast-80
(Ultra160)
Fast-160
(Ultra320)
SE
ST3300007LW/LC
yes yes yes yes no no no
ST3146707LW/LC
ST373207LW/LC
LVD
ST3300007LW/LC
yes yes yes yes yes yes yes
ST3146707LW/LC
ST373207LW/LC
9.6.3 SCSI interface cable requirements
The characteristics of cables used to connect parallel interface drives are discussed in the ANSI standards referenced in this section.
9.6.3.1 Cable requirements
The characteristic s of cables used to conn ect Ultra 320 SCSI para llel inte rface devi ces are discusse d in detail
in Section 6 of ANSI Standard T10/1365D Rev. 3. The cable characteristic s that must be considered when
interconnecting t he drives described in this manual in a Ultra32 0 SCSI parallel, daisy-chain interco nnected
system are:
• characteristic impedance (see T10/1365D Sections 6.3.3 and 6.3.4)
• propagation delay (see T10/1365D Sections 6.3.6 and 6.3.7)
• stub length (see T10/1365D Section 6.9)
• device spacing (see T10/1365D Section 6.9)
To minimize dis continuance s and signal re flections, cabl es of different impeda nces should not b e used in the
same bus. Implementations may require trade-offs in shielding effectiveness , cable length, number of loads
and spacing, transfer rates, and cost to achieve satisfactory system operation. If shielded and unshielded
cables are mixed wi thin the sam e SCSI bus , the effect of im pedance m ismatch must be c arefully c onsidered .
Proper impedance ma tching is especi ally important in orde r to maintain adequate margin at FAST-20, FAST40, FAST-80, and FAST-160 SCSI transfer rates.
Note. For LVD operation, twisted pair cables a re recommen ded. For LVD Fast-40 operation, twisted pair
cables are strongly recommended. For Fast-80 and Fast-160 op eration, twisted pair cables are
required.
LC Models
The 80-pin connector option pr ovided on LC models is intended for use on drives that plug directly into bac kplane connector in t he hos t equipmen t. In such installati ons, all backplane wi ring segm ents are sub ject to th e
electromagnetic conc epts pres ented i n Standard T10/1365D, Rev. 3, Section 6. For L C mode l dri ves, i nstallations with connectors on cables are not recommended.
9.6.4 Mating connectors
Part numbers for the different typ e co nnecto rs that mate with the va rious Che etah 10K. 7 SCSI I/O co nnecto rs
are given in the sections following.
68 Cheetah 10K.7 SCSI Product Manual, Rev. D

9.6.4.1 Mating connectors for LW model drives
The nonshielded cable connector shall be a 68 conductor connector consisting of two rows of 34 male contacts
with adjacent contacts 0.050 inch (1.27 mm) apart.
Recommended mating flat cable connector part numbers are:
Amp Model 786096-7 Female, 68-pin, panel mount
Amp Model 786090-7 Female, 68-pin, cable mount
Amp Model 749925-5 (50 mil conductor centers, 28 or 30 AWG wire)
Use two, 34 conductor, 50 mil center flat cable with this connector.
This type connector can only be used on cable ends. [1]
Amp Model 88-5870-294-5 W/O Strain Relief (25 mil conductor centers, 30 AWG wire).
Use either on cable ends or in cable middle section for daisy-chain
installations [1].
Amp Model 1-480420-0 Power connector 4 circuit housing
Berg 69307-012 12-position, 2 x 6, 2 mm receptacle housing
[1] See Figure 24.
The drive device c onnect or is a nonshi elded 68-cond uctor c onnec tor cons isting o f two ro ws of 3 4 femal e pins
with adjacent pins 50 mils apart. The connector is keyed by means of its shape (see Figure 25).
9.6.4.2 Mating connectors for LC model drives
The nonshielded connector shall be an 80-conductor connector consisting of two rows of 40 contacts with adjacent contacts 50 (1.27 mm) mils apart (see Fi gure 26 ). I/O co nne cti on using a cable is not recommended. Th e
length and size of the host equ ipment DC power car rying conductors from the DC power source to th e host
equipment 80-pin disc drive interface connector(s) should be strictly designed according to proper power transmission design con cepts. No pos sibility f or the equi pment user t o attach an 8 0-pin cabl e/connector should be
allowed, since the l ength of the DC power carrying cond uctors could not be controlled an d therefore could
become too long for safe power transmission to the drive. Multicon nector 80-conductor cables should especially not be allowed, since th e power-car rying condu ctors on the 80- conductor in terface were no t intended to
support a series of drives.
To insure that both dr ive con nector and ho st equ ipment mating connec tor m ate pr operly, both drive connector
and host equipment mating connector must meet the provisions of “SFF-8451 Specification for SCA-2
Unshielded Connections.” To obtain this specification, visit the following web site: www.sffcommittee.org
Cheetah 10K.7 SCSI Product Manual, Rev. D 69

Recommended mating 80-position PCBA mount connectors:
Straight-in connector Hot plug version (with ground guide-pin)
Seagate P/N: 77678703
Amp US P/N:
or
Amp US P/N:
or
2-557103-1
94-0680-02-1
2-557103-2
94-0680-02-2
787311-1 with polarization
787311-2 without polarization
Amp Japan P/N: 5-175475-9
Right-angle to PCBA connectors
Seagate P/N: 77678559
Amp US P/N: 2-557101-1
Amp Japan P/N: 5-175474-9
For additional information call Amp FAX service at 1-800-522-6752.
70 Cheetah 10K.7 SCSI Product Manual, Rev. D

Terminator
[7]
LW/LWV
2 through X
SCSI devices [4]
Model
[6]
Pin 1
(check your
adapter for Pin 1 location)
Host
Adapter
PCB
[3]
SCSI ID 7 [5]
[1]
[2]
SCSI ID 1
SCSI ID 0
[2]
[1] Closed end type 68-pin connector used. Terminators enabled.
[2] Open end type (in-line application) connector used.
[3] Host need not be on the end of the bus. Another devi ce can be o n the end wi th the term inator, the host
having no terminator.
[4] Total interface cab le length must not e xceed that s pecified i n ANSI doc ument T 10/1302D (inc luding hos t
adapter/initiator). The cable length restriction limits the total number of devices allowed.
[5] SCSI ID7 has highest arbitration priority, then ID15 to ID8 (ID 8 has the very lowest priority).
[6] Last drive on the bus.
[7] Open-end type 68-pin c onnector use d. If end device, use exter nal t erminato r and c losed- end type 6 8-pi n
connector.
Figure 24. SCSI daisy chain interface cabling for LW drives
Cheetah 10K.7 SCSI Product Manual, Rev. D 71

.100
(2.54)
.155
.050
.022
3.650–.005
.346
.270
1.650 .3937 .600
.0787 .200
.020 .047
.60
(15.24)
.519
1.816
(46.13)
Position 1
(13.18)
.315
(8.00)
Pos.
1
Pos.
1
3
4
12
.20
(5.08)
.085
(2.16)
typ
x 45¡ chamfer
typ
.315 – .010
(8.00)
.218
(5.54)
Pos. 68
.050
(1.27)
1.650
(41.91)
.980
(24.89)
1.368
(34.74)
Pos. 35
.0787
(2.00)
Pos.
2
3.650
(92.71)
Figure 25. Nonshielded 68-pin SCSI device connector used on LW drives
.840 – .005
.767
(19.48)
(21.34)
+.001
—.002
dia
.083
(2.1)
Trifurcated Pins
(4 places)
72 Cheetah 10K.7 SCSI Product Manual, Rev. D

C
w
7.00
(.276)
Pin 1
0.15
62.15
(2.447)
0.15
Housing
MYM
—Y—
– 0.15
(– .005)
MYM
57.87
(2.278)
Grounding
0
—0.15
+ .000
[
— .006
Pins
[
C
of Datum Y
L
12.70
(.500)
2.15–0.10
2 places
X
End View
Front View
Insert mating
I/O connector
Top View
ontact
0.50
(.020)
0.3
(.012)
1.27
(.05)
Typ
MYM
Pin 1 Pin 40
Pin 41 Pin 80
C
L
X
of Datum Y
Grounding
Pins
Back Vie
Figure 26. Nonshielded 80-pin SCSI “SCA-2” connector, used on LC drives
Cheetah 10K.7 SCSI Product Manual, Rev. D 73

Table 14: LW 68-conductor single-ended (SE) P cable signal/pin assignments [11]
Note. Note: A minus sign preceding a signal name indicates that signal is active low.
Signal
name [1]
Connector contact
number [3]
Cable conductor
number [2]
Connector
contact number [3]
Signal
name [1]
GND 1 1235 –DB12
GND 2 3436 –DB13
GND 3 5637 –DB14
GND 4 7838 –DB15
GND 5 9 10 39 –DBP1
GND 6 11 12 40 –DB0
GND 7 13 14 41 –DB1
GND 8 15 16 42 –DB2
GND 9 17 18 43 –DB3
GND 10 192044 –DB4
GND 11 212245 –DB5
GND 12 232446 –DB6
GND 13 252647 –DB7
GND 14 272848 –DBP
GND 15 293049 GND
GND 16 313250 GND
TermPwr 17 333451 TermPwr
TermPwr 18 353652 TermPwr
Reserved 19 37 38 53 Reserved
GND 20 394054 GND
GND 21 414255 –ATN
GND 22 434456 GND
GND 23 454657 –BSY
GND 24 474858 –ACK
GND 25 495059 –RST
GND 26 515260 –MSG
GND 27 535461 –SEL
GND 28 555662 –C/D
GND 29 575863 –REQ
GND 30 596064 –I/O
GND 31 616265 –DB8
GND 32 636466 –DB9
GND 33 656667 –DB10
GND 34 676868 –DB11
Notes [ ]: See page following Table 17.
74 Cheetah 10K.7 SCSI Product Manual, Rev. D

Table 15: LW 68-conductor LVD P cable signal/pin assignments [11]
Note. Note: A minus sign preceding a signal name indicates that signal is active low.
Signal name [1]
Connector contact
number [3]
Cable conductor
number [2]
Connector contact
number [3] Signal name [1]
+DB12 1 1235 –DB12
+DB13 2 3436 –DB13
+DB14 3 5637 –DB14
+DB15 4 7838 –DB15
+DBP1 5 9 10 39 –DBP1
+DB0 6 11 12 40 –DB0
+DB1 7 131441 –DB1
+DB2 8 151642 –DB2
+DB3 9 171843 –DB3
+DB4 10 19 20 44 –DB4
+DB5 11 21 22 45 –DB5
+DB6 12 23 24 46 –DB6
+DB7 13 25 26 47 –DB7
+DBP 14 27 28 48 –DBP
Ground 15 29 30 49 Ground
DIFFSNS [8] 16 313250 Ground
TermPwr 17 333451 TermPwr
TermPwr 18 353652 TermPwr
Reserved 19 37 38 53 Reserved
Ground 20 39 40 54 Ground
+ATN 21 41 42 55 –ATN
Ground 22 43 44 56 Ground
+BSY 23 45 46 57 –BSY
+ACK 24 47 48 58 –ACK
+RST 25 49 50 59 –RST
+MSG 26 51 52 60 –MSG
+SEL 27 53 54 61 –SEL
+C/D 28 55 56 62 –C/D
+REQ 29 57 58 63 –REQ
+I/O 30 59 60 64 –I/O
+DB8 31 61 62 65 –DB8
+DB9 32 63 64 66 –DB9
+DB10 33 656667 –DB10
+DB11 34 676868 –DB11
Notes [ ]: See page following Table 17.
Cheetah 10K.7 SCSI Product Manual, Rev. D 75

Table 16: LC 80-pin single-ended (SE) I/O connector pin assignments [11]
Note. A minus sign preceding a signal name indicates that signal is active low.
Connector contact
Signal name [1]
number [3] Signal number [3] Contact name[1]
12 V CHARGE 1 41 12 V GND
12 V 2 42 12 V GND
12 V 3 43 12 V GND
12 V 4 44 MATED 1 [12]
NC [10] 5 45 NC [10]
NC [10] 6 46 DIFFSNS [8]
–DB11 7 47 GND
–DB10 8 48 GND
–DB9 9 49 GND
–DB8 10 50 GND
–I/O 11 51 GND
–REQ 12 52 GND
–C/D 13 53 GND
–SEL 14 54 GND
–MSG 15 55 GND
–RST 16 56 GND
–ACK 17 57 GND
–BSY 18 58 GND
–ATN 19 59 GND
–DBP 20 60 GND
–DB7 21 61 GND
–DB6 22 62 GND
–DB5 23 63 GND
–DB4 24 64 GND
–DB3 25 65 GND
–DB2 26 66 GND
–DB1 27 67 GND
–DB0 28 68 GND
–DP1 29 69 GND
–DB15 3070GND
–DB14 3171GND
–DB13 3272GND
–DB12 3373GND
+5 V 3474MATED 2
+5 V 35755 V GND
+5 V 36765 V GND
76 Cheetah 10K.7 SCSI Product Manual, Rev. D

Table 16: LC 80-pin single-ended (SE) I/O connector pin assignments [11] (Continued)
Note. A minus sign preceding a signal name indicates that signal is active low.
Connector contact
Signal name [1]
number [3] Signal number [3] Contact name[1]
NC [10] 37 77 ACTIVE LED OUT [4] [9]
RMT-START [5] [9] [12] 38 78 DLYD-START [6] [9] [12]
SCSI ID (0) [7] [9] [12] 39 79 SCSI ID (1) [7] [9] [12]
SCSI ID (2) [7] [9] [12] 40 80 SCSI ID (3) [7] [9] [12]
Notes [ ]: See page following Table 17.
Cheetah 10K.7 SCSI Product Manual, Rev. D 77

Table 17: LC 80-pin single-ended (LVD) I/O connector pin assignments [11]
Note. A minus sign preceding a signal name indicates that signal is active low.
Connector contact
Signal name [1]
number [3] Signal number [3] Contact name[1]
12 V CHARGE 1 41 12 V GND
12 V 2 42 12 V GND
12 V 3 43 12 V GND
12 V 4 44 MATED 1 [12]
NC [10] 5 45 NC [10]
NC [10] 6 46 DIFFSNS [8]
–DB11 7 47 +DB11
–DB10 8 48 +DB10
–DB9 9 49 +DB9
–DB8 10 50 +DB8
–I/O 11 51 +I/O
–REQ 12 52 +REQ
–C/D 13 53 +C/D
–SEL 14 54 +SEL
–MSG 15 55 +MSG
–RST 16 56 +RST
–ACK 17 57 +ACK
–BSY 18 58 +BSY
–ATN 19 59 +ATN
–DBP 20 60 +DBP0
–DB7 21 61 +DB7
–DB6 22 62 +DB6
–DB5 23 63 +DB5
–DB4 24 64 +DB4
–DB3 25 65 +DB3
–DB2 26 66 +DB2
–DB1 27 67 +DB1
–DB0 28 68 +DB0
–DBP1 2969+DP1
–DB15 3070+DB15
–DB14 3171+DB14
–DB13 3272+DB13
–DB12 3373+DB12
+5 V 3474MATED 2
+5 V 35755 V GND
+5 V CHARGE36765 V GND
78 Cheetah 10K.7 SCSI Product Manual, Rev. D

Table 17: LC 80-pin single-ended (LVD) I/O connector pin assignments [11] (Continued)
Note. A minus sign preceding a signal name indicates that signal is active low.
Connector contact
Signal name [1]
number [3] Signal number [3] Contact name[1]
NC [10] 37 77 ACTIVE LED OUT [4] [9]
RMT_START [5] [9] [12] 38 78 DLYD_START [6] [9] [12]
SCSI ID (0) [7] [9] [12] 39 79 SCSI ID (1) [7] [9] [12]
SCSI ID (2) [7] [9] [12] 40 80 SCSI ID (3) [7] [9] [12]
Notes [ ]: See page following this table.
Cheetah 10K.7 SCSI Product Manual, Rev. D 79

Notes [ ] for Tables 14 through 17.
[1] See Section 9.6.4.1 for detailed electrical characteristics of these signals.
[2] The conductor numb er refers to t he conduc tor positi on when usi ng 0.025-in ch (0.63 5 mm) ce nterline fla t
ribbon cable. Other cables types may be used to implement equivalent contact assignments.
[3] Connector contacts are on 0.050 inch (1.27 mm) centers.
[4] Front panel LED signal; indicates drive activity for host front panel hard drive activity indicator.
[5] Asserted by host to enable Motor Start option (enables starting motor via SCSI bus command).
[6] Asserted by host to enable Delayed Motor Start option (motor starts at power on or after a delay of 12 sec-
onds times drive ID). This and [3] above are mutually exclusive options.
[7] Binary code on A3, A2, A1 and A0 asserted by host to set up SCSI bus ID in drive.
[8] GND provides a means for differential devices to detect the presence of a single ended device on the bus.
Drive will not operate I/O bus at Ultra2 or faster SCSI data rates if this is grounded.
[9] Signals [4] through [7] are used i n place of ins talling jumpers an d cables o n option select connectors J 2
and J6. See Section 8.1.1 notes.
[10] “NC” means no connection.
[11] 8 bit devices which are connected to the 16 data bit LVD I/O shall leave the following signals open: –DB8,
–DB9, –DB10, –DB11, –DB12, –DB13, –DB14, –DB15, and –DBP1.
8 bit devices which are connected to the 16 data bit single-ended (SE) I/O shall have the following signals
open: DB8, –DB9, –DB10, –DB11, –DB12, –DB13, –DB14, –DB15, and –DBP1.
All other signals should be connected as shown.
[12] Pins 38, 39, 40, 44 , 78 , 7 9, a nd 8 0 a re op tio n s elect pi ns an d ar e tie d h igh by th e d ri ve c ircu itry. The pre-
ferred electrical connection at the backplane is either open or grounded (open for the ‘1’ setting, grounded
for the ‘0’ setting). Alternatively, these pins may be driven by a 3.3V logic device, pulled up to 3.3V
through a pull-up resistor (recommended size of 10K ohm), or grounded through some other means.
9.7 Electrical description
Cheetah 10K.7 SCSI drives are multimode devices. That is, their I/O circuits can operate as either singleended or low voltage differential drivers/receivers (selectable using the I/O “DIFFSENS” line).
See ANSI Standard T10/1302D for detailed electrical specifications.
9.7.1 Multimode—SE and LVD alternatives
When the interface “D IFFSNS” line i s between -0.35 V and +0.5 V, the drive interface circuits operate singleended and up to and in cluding 20 M transfers /s (Fast-20 or Ultra SCS I). When “ DIFFSNS” is between +0.7 V
and +1.9 V, the drive interface circuits operate low voltage differential and up to and including 160 M
transfers/s (Fast-160 or U320 SCSI).
This multimode desi gn does not allo w dynami cally changi ng transm issi on mode s. Dri ves must operate only i n
the mode for which the installation an d interface cabling is designed. Multimo de I/O circuits used by these
drives do not operate at high voltage differential levels and should never be exposed to high voltage differential
environments unless the common mode vo ltages in the environment are controlled to s afe levels for si ngleended and low voltage differential devices (see ANSI SPI-4 specification T10/1365D).
LC and LW model drives do not have onboard terminators. Termination of the I/O lines must be provided for by
the Host equipment designers or end users.
LVD output characteristics
Each differential sign al driven by LV D interface drivers shall have th e following output characteristic s when
measured at the disc drive connector:
Steady state Low level output differential voltage = 0.320 V = < |V
Steady state High level output differential voltage = 0.320 V = < |V
| = < 0.800 V (signal negation/logic 0)
s
| = < 0.800 V (signal assertion/logic 1)
s
80 Cheetah 10K.7 SCSI Product Manual, Rev. D

L VD input characteristics
Each differential signal received by LVD interface receiver circuits shall have the following input characteristics
when measured at the disc drive connector:
Steady state Low level input differential voltage = 0.030 V = < V
Steady state High level input differential voltage = –3.6 V = < V
Differential voltage = +
0.030 V minimum with common-mode voltage range 0.845 V = < Vcm = < 1.655 V.
(T10/1302D revision 14, section A.3.2).
VCCA VCCB
Single
Ended
Circuitry
Single
Ended
Ground
Driver
Ground
Single Ended:
LVD:
GND
+Signal
Figure 27. Typical SE-LVD alternative transmitter receiver circuits
LVD Signal Drivers
LVD
Receiver
LVD Signal Drivers
Single
Ended
Receiver
—Signal
—Signal
Single
Ended
Negation
Driver
Single
Ended
Assertion
Driver
= < 3.6 V (signal negation/logic 0)
in
= < –0.030 V (signal assertion/logic 1)
in
9.7.1.1 General cable characteristics
To minimize di scontinuities and signal refl ections, cables of different imped ances should not be used in the
same bus. Implementations may require trade-offs in shielding effectiveness, cable length, the number of
loads, transfer rates, and cos t to ac hieve satis factory system operat ion. If shield ed and un sh ielde d cables are
mixed within the same SCSI bus, the effect of impedance mismatch must be carefully considered. Proper
impedance matching is especially important in order to maintain adequate margin at fast SCSI transfer rates.
9.7.1.2 Single-ended drivers/receivers
The maximum total cable length allowed with drives using single-ended I/O driver and receiver circuits
depends on sever al factors. Tabl e 18 lists the maximum lengt hs allowed for different confi gurations of drive
usage. These valu es are from the SPI documents. All device I/O lines must have equ al to or less th an 25 pf
capacitance to ground, measured at the beginning of the stub.
Table 18: Cable charact eristics for single-ended circuits
maximum length
Maximum number of
I/O transfer rate
10M transfers/s (Fast 10) 16 (wide SCSI bus) 3 meters (9.8 ft) 90 + 6 Ohms 90 + 10 Ohms
<
<
20M transfers/s (Fast 20) 4 (wide SCSI bus) 3 meters (9.8 ft) 90 + 6 Ohms 90 + 10 Ohms
<
20M transfers/s (Fast 20) 8 (wide SCSI bus) 1.5 meters (4.9 ft) 90 + 6 Ohms 90 + 10 Ohms
devices on the bus
between SCSI S.E.
terminators
Transmission line impedance
REQ/ACK Other signals
A stub length of no more than 0.1 meter (0.33 ft) is allowed off the mainline interconnection with any connected
equipment. The stub length is measured from the transceiver to the connection to the mainline SCSI bus.
Cheetah 10K.7 SCSI Product Manual, Rev. D 81

Single-ended I/O cable pin assignments for LW drives are shown in Table 15.
Single-ended I/O pin assignments for LC models are shown in Table 16. The LC model does not require an I/O
cable. It is designed to connect directly to a back panel connector.
9.7.1.3 Cables for low voltage differential drivers/receivers
The SPI-3 and SPI-4 specification for differential impedance for LVD cables is 122.5 ± 12.5 ohms.
The maximum SCSI bus length between the terminators for a SCSI LVD po int-to-point system (one initia tor
and one target) is 25 meters (82 feet).
The maximum SCSI bus length between the terminators for a SCSI LVD multidrop system (up to 16 total SCSI
devices) is 12 meters (39.37 feet) . However, implementation of thi s 12-meter total length is dependent o n the
configuration of the system and the choice of c able. See Tables 19 and 20 for examples of recommende d
SCSI LVD cable types and lengths.
It should be noted from th e data in Tables 19 and 20 that shielded round twisted-pair cables can b e used to
implement a 12-meter system, while Twist-n-flat cables cannot be used to implement a 12-meter system due to
higher levels of attenua tion and crosstalk. In addition, twist-n-flat cabl es with shorter sections of twist allow
greater crosstalk and their lengths must be reduced as shown in Table 20.
Table 19: Example shielded round twisted-pair cables - into a multi-drive backplane
Cable
description
30 AWG
solid
28 AWG
stranded
28 AWG
stranded
SingleDifferential
impedance,
nominal
130 ohms 90 ohms 17 pF/ft 1.36 ns/ft 0.113 ohms/ft 12 meters minus the SCSI
123 ohms 80 ohms 19 pF/ft 1.54 ns/ft 0.067 ohms/ft 12 meters minus the SCSI
132 ohms 85 ohms 20 pF/ft 1.50 ns/ft 0.065 ohms/ft 12 meters minus the SCSI
ended
impedance,
nominal
Singleended
capacitance,
maximum
Time
delay,
nominal
Conductor
DC
resistance,
nominal
Maximum shielded round
twisted-pair cable length
for U160/U320
trace length of the backplane
trace length of the backplane
trace length of the backplane
82 Cheetah 10K.7 SCSI Product Manual, Rev. D

Table 20: Example Twist-n-flat cables - into a multi-drive backplane
Maximum twist-n-flat
cable leng th
U320
transfer rate
3.05 meters
(10.0 ft)
2.45 meters
(8.33 ft)
1.52 meters
(5.0 ft)
U160
transfer rate
6.1 meters
(20.0 ft)
4.9 meters
(16.66 ft)
3.04 meters
(10.0 ft)
Cable
description
TPE, 22.25” twist,
1.75” flat, (24” flat
to flat), 30 AWG
solid tinned copper
TPE, 8.1” twist,
1.75” flat, (9.85” f lat
to flat), 30 AWG
solid tinned copper
TPE, 4.25” twist,
1.75” flat, (6” flat to
flat), 30 AWG so lid
tinned copper
SingleDifferential
impedance,
nominal
131 ohms 93 ohms 15.3 pF/ft 1.45 ns/ft 0.105
131 ohms 93 ohms 15.3 pF/ft 1.45 ns/ft 0.105
131 ohms 93 ohms 15.3 pF/ft 1.45 ns/ft 0.105
ended
impedance,
nominal
Singleended
capacitance,
maximum
Time
delay,
nominal
Conductor
DC
resistance,
nominal
ohms/ft
ohms/ft
ohms/ft
9.8 Terminator requirements
Caution: These drives do not have onboard internal terminators. The user, systems integrator or host equip-
ment manufacturer must provide a terminator arrangement external to the drive when termination is
required. For LW drives, terminator modules can be purchased that plug between the SCSI I/O
cable and the drive I/O conn ector or on the end of a short I/O cable stub extending past the las t
cable connector. LC drives are designed to be plugged into a backpanel connector without cabling.
9.9 Terminator power
LW drives
You can con figure terminator power from the drive to the SCSI bus or have the host adaptor or other device
supply terminator powe r to the external terminator. See Section 8.1 for illustrations that show how to place
jumpers for this configuration.
LC drives
These drives cannot fu rnish te rmin ator power becau se no cond uctor s in th e 80-pin I/O co nnecto r are dev oted
to terminator power.
Cheetah 10K.7 SCSI Product Manual, Rev. D 83

9.10 Disc drive SCSI timing
Table 21: Disc drive SCSI timing
These values are not current Cheetah 10K.7 SCSI values, but are listed for information only.
Description
Waveform
symbol [1]
Waveform
table [1] Typical timin g
Target Select Time (no Arbitration) T00 N/A <1 µs
Target Select Time (with Arbitration) T01 4.5-1,2 1.93 µs
Target Select to Command T02 4.5-1 3.77 µs
Target Select to MSG Out T03 4.5-2 1.57 µs
Identify MSG to Command T04 4.5-3 3.36 µs
Command to Status T05 4.5-5 Command Dependent
Command to Data (para. In) T06 4.5-9 Command Dependent
Command to Data (para. Out) T07 4.5-10 Command Dependent
Command to Data (Write to Data Buffer) T08 4.5-10 Command Dependent
Command to Disconnect MSG T09 4.5-6 Command Dependent
Disconnect MSG to Bus Free T10 4.5-6,14 0.52 µs
Disconnect to Arbitration (for Reselect)
T1 1 4.5-6 Command Dependent
This measures disconnected CMD overhead
Target win Arbitration (for Reselect) T12 4.5-7 3.00 µs
Arbitration to Reselect T13 4.5-7 1.60 µs
Reselect to Identify MSG In T14 4.5-7 1.39 µs
Reselect Identify MSG to Status T15 4.5-8 Command Dependent
Reselect Identify MSG to Data (media) T16 4.5-11 Command Dependent
Data to Status T17 4.5-15 Command Dependent
Status to Command Complete MSG T18 4.5-5,8,15 0.98 µs
Command Complete MSG to Bus Free T19 4.5-5,8,15 0.51 µs
Data to Save Data Pointer MSG T20 4.5-14 4.00 µs
Save Data Pointer MSG to Disconnect MSG T21 4.5-14 0.79 µs
Command Byte Transfer T22 4.5-4 0.04 µs
Next Command Byte Access: 4.5-4
Next CDB Byte Access (Byte 2 of 6) T23.6.2 4.5-4 0.58 µs
Next CDB Byte Access (Byte 3 of 6) T23.6.3 4.5-4 0.12 µs
Next CDB Byte Access (Byte 4 of 6) T23.6.4 4.5-4 0.12 µs
Next CDB Byte Access (Byte 5 of 6) T23.6.5 4.5-4 0.12 µs
Next CDB Byte Access (Byte 6 of 6) T23.6.6 4.5-4 0.12 µs
Next CDB Byte Access (Byte 2 of 10) T23.10.2 4.5-4 0.59 µs
Next CDB Byte Access (Byte 3 of 10) T23.10.3 4.5-4 0.11 µs ±1 µs
Next CDB Byte Access (Byte 4 of 10) T23.10.4 4.5-4 0.12 µs ±1 µs
Next CDB Byte Access (Byte 5 of 10) T23.10.5 4.5-4 0.11 µs ±1 µs
Next CDB Byte Access (Byte 6 of 10) T23.10.6 4.5-4 0.11 µs ±1 µs
Next CDB Byte Access (Byte 7 of 10) T23.10.7 4.5-4 0.13 µs ±1 µs
84 Cheetah 10K.7 SCSI Product Manual, Rev. D

Table 21: Disc drive SCSI timing (Continued)
These values are not current Cheetah 10K.7 SCSI values, but are listed for information only.
Description
Waveform
symbol [1]
Waveform
table [1] Typical timing
Next CDB Byte Access (Byte 8 of 10) T23.10.8 4.5-4 0.12 µs ±1 µs
Next CDB Byte Access (Byte 9 of 10) T23.10.9 4.5-4 0.12 µs ±1 µs
Next CDB Byte Access (Byte 10 of 10) T23.10.10 4.5-4 0.12 µs ±1 µs
Data In Byte Transfer (parameter) T24 4.5-12 0.04 µs
Data Out Byte Transfer (parameter) T25 4.5-13 0.04 µs
Next Data In Byte Access (parameter) T26 4.5-12 0.12 µs
Next Data Out Byte Access (parameter) T27 4.5-13 0.12 µs
Data In Byte Transfer (media) [2] T28 4.5-12 0.04 µs
Data Out Byte Transfer (media) [2] T29 4.5-13 0.04 µs
Next Data In Byte access (media [2] T30 4.5-12 0.12 µs
Next Data Out Byte access (media [2] T31 4.5-13 0.12 µs
MSG IN Byte Transfer T32 4.5-5,7,8,14,15 0.04 µs
MSG OUT Byte Transfer T33 4.5-2 0.04 µs
ST ATUS Byte Transfer T34 4.5-5,8,15 0.04 µs
Synchronous Data Transfer Characteristics:
Request Signal Transfer Period [3] – – various (800 ns max)
Notes.
[1] See the Timing examples section of the SCSI Interface Product Manual.
[2] Maximum SCSI asynchronous interface transfer rate is given in Section 4.2.3 of this manual.
[3] Synchronous Transfer Period is determi ned by negoti ations betwe en an Initiator an d a drive. The dr ive is
capable of setting periods as given in Section 9.5. See also the Synchronous data transfer section and the
Extended messages sec tion of the SCSI Interfac e Product Ma nual for a de scription of synch ronous da ta
transfer operation.
Cheetah 10K.7 SCSI Product Manual, Rev. D 85

9.1 1 Drive activity LED
The following table provides drive activity LED status.
Table 22: Drive activity LED status
Spindle status Command status LED status
Spinning up with DC power applied N/A On until spinup is complete
Spun down Start Unit On while processing the command
Powered down by removal of DC
power
Spun up Stop Unit On while processing the command
Spun down No command activity Off
Spun down Write/Read Buffer On while processing the command
Spun down SCSI Bus Reset On while processing the reset
Spun down Test Unit Ready On while processing the command
Spun up No command activity Off
Spun up Write/Read On while processing the command
Spun up SCSI Bus Reset On while processing the reset
Spun up Test Unit Ready On while processing the command
Spun up Format with Immediate option on On while the command is initially processed
Spun up Format without Immediate LED toggles on/off on each cylinder
N/A Off due to absence of power
boundary
86 Cheetah 10K.7 SCSI Product Manual, Rev. D

10.0 Seagate Technology support services
Online services
Internet
www.seagate.com for informatio n about Seagate products and servic es. Worldwide support is availab le 24
hours daily by e-mail for your questions.
Presales Support: www.sea
Technical Support: www.sea
gate.com/support/email/email_presales.html or Presales@Seagate.com
gate.com/support/email/email_disc_support.html or DiscSupport@Seagate.com
mySeagate
my.seagate.com is the indus try’s first Web portal designed s pecifically for OE Ms and distributors. It provides
self-service a ccess to cr itical app lications, personaliz ed content and the tool s that allo w our partner s to manage their Seagate account fun ctions. Submit prici ng requests, order s and returns through a singl e, passwordprotected Web interface—anytime, anywhere in the world.
reseller.seagate.com
reseller.seagate.com supports Seag ate resellers with produc t information, program benefi ts and sales tools.
You may re gister for customized commu nications that are not available on the web. These communicati ons
contain product la unch, EOL, pr icing, prom otions and oth er channel- related inf ormation. To learn more about
the benefits or to register, go to reseller.sea
gate.com, any time, from anywhere in the world.
Automated phone services
SeaFONE® (1-800-SEAGATE) is the Seagate toll-free number (1-800-732-4283) to access our automated
directory assistance for Seagate Service Center support options. International callers can reach this service by
dialing +1-405-324-477 0.
Seagate Service Centers
Presales Support
Our Presales Suppo rt staff can help you deter mine which Seagate products are best suited for your specific
application or computer system, as well as drive availability and compatibility.
Technical Support
If you need help installing your dr ive, consult your system's docume ntation or contact the deal er 's supp or t ser vices department for assista nce specific to your sy stem. Seagate techn ical support is also av ailable to assist
you online at support.sea
tion and your drive’s “ST” model number available.
SeaTDD™ (+1-405-324-3655) is a telecommunica tions devi ce fo r the deaf (TD D). You can send question s or
comments 24 hours d aily and e xcha nge m essag es wi th a technic al s upport speci alist during nor mal b usine ss
hours for the call center in your region.
Cheetah 10K.7 SCSI Product Manual, Rev. D 87
gate.com or through one of our call centers. Have your system configuration informa-

Customer Service Operations
Warranty Service
Seagate offers worldwide customer supp ort for Seagate drives. Seagate dis tributors, OEMs and other direct
customers should contact their Seagate Customer Service Operations (CSO) representative for warrantyrelated issues. Resell ers or end users of drive products should contact their plac e of purchase or one of th e
Seagate CSO warranty center s for ass istance. Have your drive’s “ST” mod el numbe r and serial nu mber av ailable.
Data Recovery Services
Seagate offers data recovery services for all formats and all brands of storage media. Our Data Recovery Services labs are currently located in North America. To get a free quick quote or speak with a case manage men t
representative, call 1-800-475-0143. Additional information, including an online request form and data loss prevention resources, is available at www.datarecovery.sea
gate.com.
Authorized Service Centers
In some locations outside the US, you can contact an Authorized Service Center for service.
USA/Canada/Latin America support services
Seagate Service Centers
Presales Support
Call center Toll-free Direct dial FAX
Americas 1-877-271-3285
1
+1-405-324-4730
1
+1-405-324-4704
Technical Support
Call center Toll-free Direct dial FAX
Americas 1-800-SEAGATE
2
+1-405-324-4700
2
+1-405-324-3339
Customer Service Operations
Warranty Service
Call center Toll-free Direct dial FAX / E-mail
USA, Canada, Mexico and 1-800-468-3472
Latin America
Brazil
Jabil Industrial Do Brasil — +55-11-4191-4761 +55-11-4191-5084
4
LTDA
Data Recovery Services
Call center Toll-free Direct dial FAX
USA, Canada, 1-800-475-01435 +1-905-474-2162 1-800-475-0158
and Mexico +1-905-474-2459
1
Hours of operation are 8:00 A.M. to 11:45 A.M. and 1:00 P.M. to 6:00 P.M., Monday through Friday (Central time).
2
Hours of operation are 8:00 A.M. to 8:00 P.M., Monday through Friday (Central time).
3
Hours of operation are 8:00 A.M. to 5:00 P.M., Monday through Friday (Central time).
4
Authorized Service Center
5
Hours of operation are 8:00 A.M. to 8:00 P.M., Monday through Friday, and 9:00 A.M. to 5:00 P.M., Saturday (Eastern time).
3
— +1-956-664-4725
SeagateRMA.br@jabil.com
88 Cheetah 10K.7 SCSI Product Manual, Rev. D

European support services
For presales and technic al support in Europe , dial the Seagate Serv ice Center toll-free nu mber for your specific location. If yo ur location is not listed h ere, dial our presales and tech nical support call cen ter at +1-405324-4714 from 8:00
A.M. to 11:45 A.M. and 1:00 P.M. to 5:00 P.M. (Central Europe time) Monday through Friday.
The presales and technical support call center is located in Oklahoma City, USA.
For European warranty service , dial the tol l-free numb er for you r specific locatio n. If your l ocation is not liste d
here, dial our Euro pean CS O warr an ty ce nter at +31-20-316-7222 fr om 8:3 0
A.M. to 5:00 P.M. (Central Europ e
time) Monday through Friday. The CSO warranty center is located in Amsterdam, The Netherlands.
Seagate Service Centers
Toll-free support numbers
Call center Presales and Technical Support Warranty Service
Austria — 00 800-47324289
Belgium 00 800-47324283 (00 800-4SEAGATE) 00 800-47324289
Denmark 00 800-47324283 00 800-47324289
France 00 800-47324283 00 800-47324289
Germany 00 800-47324283 00 800-47324289
Ireland 00 800-47324283 00 800-47324289
Italy 00 800-47324283 00 800-47324289
Netherlands 00 800-47324283 00 800-47324289
Norway 00 800-47324283 00 800-47324289
Poland 00 800-311 12 38 00 800-311 12 38
Spain 00 800-47324283 00 800-47324289
Sweden 00 800-47324283 00 800-47324289
Switzerland 00 800-47324283 00 800-47324289
Turkey 00 800-31 92 91 40 00 800-31 92 91 40
United Kingdom 00 800-47324283 00 800-47324289
FAX services—All Europe (toll call)
Technical Support +1-405-324-3339
Warranty Service +31-20-653-3513
Africa/Middle East support services
For presales and tec hnical suppo rt in Africa and the Midd le East, dia l our presal es and technic al support c all
center at +1-405-32 4-471 4 from 8:00
day through Friday. The presales and technical support call center is located in Oklahoma City, USA.
For warranty service in Africa and the Middle East, dial our Euro pean CSO warranty center at +31-20-3167222 from 8:30
A.M. to 5:00 P.M. (Centr al Euro pe time ) Mond ay throu gh Frid ay, or send a FAX to +31-20-653-
3513. The CSO warranty center is located in Amsterdam, The Netherlands.
A.M. to 11:45 A.M. and 1:00 P.M. to 5:00 P.M. (Central Europe time) Mon-
Cheetah 10K.7 SCSI Product Manual, Rev. D 89

Asia/Pacific support services
For Asia/Pacific pr esales and technical s upport, dial the toll-fre e number for your specific location. The Asia /
Pacific toll-free numbers are available from 6:00
ern time) Monday through Friday, except as noted. If your location is not listed here, direct dial one of our technical support locations.
A.M. to 10:45 A.M. and 12:00 P.M. to 6:00 P.M. (Australian East-
Warranty service is availabl e from 9:00
A.M. to 6:00 P.M. April throu gh October, and 10:00 A.M. to 7:00 P.M.
November through March (Australian Eastern time) Monday through Friday.
Seagate Service Centers
Call center Toll-free Direct dial FAX
Australia 1800-14-7201 — —
China (Mandarin)
Hong Kong 800-90-0474 — —
Hong Kong (Cantonese)
2, 4
India
1, 4
800-810-9668 +86-10-6225-5336 —
1, 4
001-800-0830-1730 — —
1-600-180-1104 — —
Indonesia 001-803-1-003-2165 — —
3, 4
Japan
Korea
3, 4
0034 800 400 554 — —
007 98 8521 7635 — —
Malaysia 1-800-80-2335 — —
New Zealand 0800-443988 — —
Singapore 800-1101-150 — +65-6488-7525
Taiwan (Mandarin)
1, 4
00-800-0830-1730 — —
Thailand 001-800-11-0032165 — —
Customer Service Operations
Warranty Service
Call center Toll-free Direct dial FAX
Asia/Pacific — +65-6485-3595 +65-6485-4860
Australia 1800-12-9277 — —
4
India
— +91-44-821-6164 +91-44-827-2461
1
Hours of operation are 8:30 A.M. to 5:30 P.M., Monday through Friday (Australian Western time).
2
Hours of operation are 9:00 A.M. to 6:00 P.M., Monday through Saturday.
3
Hours of operation are 9:30 A.M. to 6:30 P.M., Monday through Friday.
4
Authorized Service Center
90 Cheetah 10K.7 SCSI Product Manual, Rev. D
 Loading...
Loading...