

seagate ST3283N Product Manual

ST3283N
SCSI Interface Drive
Product Manual
36184-001, Rev. A
November 9, 1991

Copyright Notice
Seagate
®
, Seagate Technology® and the Seagate logo are registered
trademarks of Seagate Technology, Inc. This publication is copyrighted
with all rights reserved and may not be copied, in whole or part, without
written permission from Seagate Technology, Inc.
© Copyright 1991 Seagate Technology, Inc.
920 Disc Drive
Scotts Valley, California 95066-4544, USA
Telephone: 408/438-6550
Publication Number: 36184-001, Rev. A
The products referenced in this publication are trademarks of their
respective owners.
ST3283N SCSI Interface Drive Product Manual, Rev. A iii
Table of Contents
1.0 Specifications Summary . . . . . . . . . . . . . . . . . . . 1
1.1 Formatted Capacity . . . . . . . . . . . . . . . . . . . . . 1
1.2 Drive Performance Specifications . . . . . . . . . . . . . . 2
1.2.1 Multi-Segment Read Look-Ahead Buffer . . . . . . . . 2
1.2.2 Seek Time Definition and Specifications . . . . . . . . 2
1.2.2.1 Thermal Compensation . . . . . . . . . . . . . . 3
1.2.3 Format Drive . . . . . . . . . . . . . . . . . . . . . . 3
1.2.4 Start/Stop Time . . . . . . . . . . . . . . . . . . . . . 3
1.2.5 Typical Power-Up/Power-Down Sequence . . . . . . . 4
1.2.5.1 Power-Up Sequence . . . . . . . . . . . . . . . . 4
1.2.5.2 Power-Down Sequence . . . . . . . . . . . . . . 4
1.2.5.3 Read/Write Head Auto-Park . . . . . . . . . . . . 5
1.3 Reliability . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4 Physical Dimensions . . . . . . . . . . . . . . . . . . . . 5
1.5 Environme n t a l . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5.1 Ambient Temperature . . . . . . . . . . . . . . . . . 5
1.5.2 Temperature Gradient . . . . . . . . . . . . . . . . . 6
1.5.3 Relative Humidity . . . . . . . . . . . . . . . . . . . . 6
1.5.4 Altitude . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.6 Acoustics . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.7 Shock and Vibration . . . . . . . . . . . . . . . . . . . . . 6
1.8 DC Power . . . . . . . . . . . . . . . . . . . . . . . . . . 7
iv ST3283N SCSI Interface Drive Product Manual, Rev. A
1.8.1 Power Mode Descriptions . . . . . . . . . . . . . . . . 8
1.8.2 Power Consumption . . . . . . . . . . . . . . . . . . 9
1.9 Agency Listings . . . . . . . . . . . . . . . . . . . . . . 11
1.9.1 UL Recognition . . . . . . . . . . . . . . . . . . . . 11
1.9.2 CSA Listing . . . . . . . . . . . . . . . . . . . . . . 11
1.9.3 VDE Listing . . . . . . . . . . . . . . . . . . . . . . 11
1.9.4 FCC Verification . . . . . . . . . . . . . . . . . . . . 11
1.10 Drive Mounting . . . . . . . . . . . . . . . . . . . . . . 13
1.10.1 Handling and Static Discharge Precautions . . . . . 14
1.10.2 Hot-plugging . . . . . . . . . . . . . . . . . . . . . 14
2.0 Interface Description and Options . . . . . . . . . . . . . 17
2.1 SCSI-2 Compatibility . . . . . . . . . . . . . . . . . . . . 17
2.2 SCSI Connector . . . . . . . . . . . . . . . . . . . . . . 17
2.2.1 SCSI Connector Requirements . . . . . . . . . . . . 17
2.2.1.1 SCSI Connector Pin Assignments . . . . . . . . 19
2.3 Cable Requirements . . . . . . . . . . . . . . . . . . . . 20
2.3.1 Single-Ended Cable . . . . . . . . . . . . . . . . . . 20
2.3.2 Fast Synchronous Data Transfer . . . . . . . . . . . 20
2.4 Terminators . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4.1 Active Termination . . . . . . . . . . . . . . . . . . 21
2.4.2 Passive Termination . . . . . . . . . . . . . . . . . 22
2.4.2.1 Single-Ended Drivers/Receivers . . . . . . . . . 22
2.5 Configuration Jumpers . . . . . . . . . . . . . . . . . . . 23
2.5.1 Parity/Remote Start Jumper Block . . . . . . . . . . 24
ST3283N SCSI Interface Drive Product Manual, Rev. A v
2.5.1.1 Parity Enable Option . . . . . . . . . . . . . . . . 24
2.5.1.2 Start/Stop Option . . . . . . . . . . . . . . . . . 24
2.5.2 Active/Passive Termination Jumper Block . . . . . . . 24
2.5.3 Terminator Power Source Jumper Block . . . . . . . . 24
2.5.4 SCSI ID Address Jumper Block . . . . . . . . . . . . 25
2.5.5 Options Jumper Block . . . . . . . . . . . . . . . . . 25
2.6 External Spindle Synchronization Option . . . . . . . . . . 27
3.0 SCSI B us . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1 SCSI ID Bits . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.2 SCSI Bus Signals
3.2.1 Signal Values . . . . . . . . . . . . . . . . . . . . . . 33
3.2.2 OR-Tied Signals . . . . . . . . . . . . . . . . . . . . 33
3.2.3 Signal Sources . . . . . . . . . . . . . . . . . . . . . 33
3.3 SCSI B u s Ti ming . . . . . . . . . . . . . . . . . . . . . . 35
3.4 Fast Synchronous Transfer Rates . . . . . . . . . . . . . 37
4.0 Logical Characteristics . . . . . . . . . . . . . . . . . . . . 39
4.1 SCSI B u s P h a se s . . . . . . . . . . . . . . . . . . . . . . 39
4.1.1 Bus Free Phase . . . . . . . . . . . . . . . . . . . . 39
4.1.2 Arbitration Phase . . . . . . . . . . . . . . . . . . . . 40
4.1.3 Selection Phase . . . . . . . . . . . . . . . . . . . . 41
4.1.3.1 Nonarbitrating Systems . . . . . . . . . . . . . . 41
4.1.3.2 Arbitrating Systems . . . . . . . . . . . . . . . . 42
4.1.3.3 All Systems . . . . . . . . . . . . . . . . . . . . 42
. . . . . . . . . . . . . . . . . . . . . . 32
4.1.3.4 Single Initiator Option . . . . . . . . . . . . . . . 42
vi ST3283N SCSI Interface Drive Product Manual, Rev. A
4.1.3.5 Selection Time-out Procedure . . . . . . . . . . 43
4.1.4 Reselection Phase . . . . . . . . . . . . . . . . . . 43
4.1.4.1 Reselection Procedure . . . . . . . . . . . . . . 43
4.1.4.2 Reselection Time-out Procedure . . . . . . . . . 44
4.1.5 Information Transfer Phases . . . . . . . . . . . . . 45
4.1.5.1 Asynchronous Data Transfer . . . . . . . . . . . 46
4.1.5.2 Synchronous Data Transfer . . . . . . . . . . . 46
4.1.6 Command Phase . . . . . . . . . . . . . . . . . . . 47
4.1.7 Data Phases . . . . . . . . . . . . . . . . . . . . . 48
4.1.7. 1 Data In Pha se . . . . . . . . . . . . . . . . . . 48
4.1.7. 2 Data Ou t Phase . . . . . . . . . . . . . . . . . 48
4.1.8 Status Phase . . . . . . . . . . . . . . . . . . . . . 48
4.1.9 Message Phases . . . . . . . . . . . . . . . . . . . 48
4.1.9.1 Message In Phase . . . . . . . . . . . . . . . . 48
4.1.9.2 Message Out Phase . . . . . . . . . . . . . . . 48
4.1.10 Signal Restrictions Between Phases . . . . . . . . 49
4.2 SCSI Bus Conditions . . . . . . . . . . . . . . . . . . . . 50
4.2.1 Attention Condition . . . . . . . . . . . . . . . . . . 50
4.2.2 Reset Condition . . . . . . . . . . . . . . . . . . . . 51
4.3 SCSI B u s P h a se s . . . . . . . . . . . . . . . . . . . . . 51
4.3.1 Arbitration Transfer Phases . . . . . . . . . . . . . . 52
4.3.1.1 Systems with Arbitration . . . . . . . . . . . . . 52
4.3.1.2 Systems without Arbitration . . . . . . . . . . . 52
4.4 SCSI Pointers . . . . . . . . . . . . . . . . . . . . . . . 52
ST3283N SCSI Interface Drive Product Manual, Rev. A vii
4.5 Message System Specification . . . . . . . . . . . . . . . 54
4.5.1 Message Protocol . . . . . . . . . . . . . . . . . . . 54
4.5.2 Single-Byte Messages . . . . . . . . . . . . . . . . . 55
4.5.3 Extended Messages . . . . . . . . . . . . . . . . . . 59
4.5.3.1 Synchronous Data Transfer Request Message . . 60
5.0 SCSI Commands . . . . . . . . . . . . . . . . . . . . . . . 61
5.1 Command Implementation Requirements . . . . . . . . . . 61
5.1.1 Res e rv e d Ad d r e sses . . . . . . . . . . . . . . . . . . 61
5.1.2 Unit Attention Condition . . . . . . . . . . . . . . . . 62
5.1.3 Command Queuing . . . . . . . . . . . . . . . . . . 62
5.2 Command Descriptor Block (CDB) . . . . . . . . . . . . . 63
5.2.1 Operation Code . . . . . . . . . . . . . . . . . . . . 64
5.2.1.1 Operation Code Format for CDB Byte 0 . . . . . . 64
5.2.1.2 Typical 6-Byte Command Descriptor Block . . . . 64
5.2.1.3 Typical 10-Byte Command Descriptor Block . . . 65
5.2.2 Logical Unit Number (LUN) . . . . . . . . . . . . . . . 65
5.2.3 Logical Block Address . . . . . . . . . . . . . . . . . 66
5.2.4 Rela t i v e Ad d r e ss Bi t . . . . . . . . . . . . . . . . . . 66
5.2.5 Transfer Length . . . . . . . . . . . . . . . . . . . . 66
5.2.6 Control Byte . . . . . . . . . . . . . . . . . . . . . . 67
5.3 Command Examples . . . . . . . . . . . . . . . . . . . . 68
5.3.1 Single-Command Example . . . . . . . . . . . . . . . 68
5.3.2 Disconnect Example . . . . . . . . . . . . . . . . . . 68
5.4 Timing Examples . . . . . . . . . . . . . . . . . . . . . . 71
viii ST3283N SCSI Interface Drive Product Manual, Rev. A
5.5 Status . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
5.5.1 Status Byte . . . . . . . . . . . . . . . . . . . . . . 88
5.5.2 Command Completion Status Values . . . . . . . . . 88
6.0 Command Se t . . . . . . . . . . . . . . . . . . . . . . . . 89
6.1 Group 0 Command Descriptions . . . . . . . . . . . . . . 89
6.1.1 Test Unit Ready (00
6.1.2 Rezero Unit Command (01
6.1.3 Request Sense Command (03
) . . . . . . . . . . . . . . . . 90
H
) . . . . . . . . . . . . . 91
H
) . . . . . . . . . . . 92
H
6.1.3.1 Extended Sense Data Format . . . . . . . . . . 93
6.1.3.2 Sense Key Descriptions . . . . . . . . . . . . . 95
6.1.3.3 Additional Sense Codes . . . . . . . . . . . . . 96
6.1.4 Format Unit Command (04
) . . . . . . . . . . . . . 100
H
6.1.4.1 Format Unit Parameter Definition . . . . . . . . 103
6.1.4.2 Defect List Header and Defect List . . . . . . . . 104
6.1.4.3 Defect List Header Bit Interpretation . . . . . . . 105
6.1.4.4 Defect Descriptor: Bytes from Index . . . . . . . 106
6.1.4.5 Defect Descriptor: Physical Sector Number . . . 107
6.1.5 Reassign Blocks Command (07
) . . . . . . . . . . 108
H
6.1.5.1 Reassign Block Defect List . . . . . . . . . . . . 109
6.1.6 Read Command (08
) . . . . . . . . . . . . . . . . 110
H
6.1.6.1 Check Condition Status (Read Command) . . . . 111
6.1.7 Write Command (0A
) . . . . . . . . . . . . . . . . 112
H
6.1.7.1 Check Condition Status (Write Command) . . . . 113
6.1.8 Seek Command (0B
) . . . . . . . . . . . . . . . . 114
H
ST3283N SCSI Interface Drive Product Manual, Rev. A ix
6.1.9 Inquiry Command (12H) . . . . . . . . . . . . . . . 114
6.1.9.1 Inquiry Data Summary . . . . . . . . . . . . . . 116
6.1.9.2 Inquiry Data Summary Field Definitions . . . . . 116
6.1.10 Mode Select Command (15
) . . . . . . . . . . . . 118
H
6.1.10.1 Mode Select Parameter List . . . . . . . . . . 119
6.1.10.2 Page Descriptor Header . . . . . . . . . . . . 120
6.1.10.3 Page Code Descriptions . . . . . . . . . . . . 121
6.1.10.4 Parameter List Length . . . . . . . . . . . . . 122
6.1.11 Reserve Command (16
) . . . . . . . . . . . . . . 1 2 3
H
6.1.11.1 Logical Unit Reservation . . . . . . . . . . . . 123
6.1.11.2 Extent Reservation . . . . . . . . . . . . . . . 124
6.1.11.3 Third-Party Reservation Option . . . . . . . . 124
6.1.11.4 Superseding Reservations . . . . . . . . . . . 124
6.1.12 Release Command (17
) . . . . . . . . . . . . . . 125
H
6.1.12.1 Logical Unit Release . . . . . . . . . . . . . . 125
6.1.12.2 Extent Release . . . . . . . . . . . . . . . . . 125
6.1.12.3 Third-Party Release . . . . . . . . . . . . . . 126
6.1.13 Mode Sense Command (1A
) . . . . . . . . . . . 126
H
6.1.13.1 Mode Sense CDB Setup . . . . . . . . . . . . 128
6.1.13.2 Mode Sense Data . . . . . . . . . . . . . . . 130
6.1.13.3 Mode Sense Page Descriptor Header . . . . . 132
6.1.14 Start/Stop Unit Command (1B
6.1.15 Receive Diagnostic Results Command (1C
) . . . . . . . . . . 133
H
) . . . 134
H
6.1.15.1 Diagnostics Error Codes . . . . . . . . . . . . 136
x ST3283N SCSI Interface Drive Product Manual, Rev. A
6.1.16 Send Diagnostic Command (1DH) . . . . . . . . . . 137
6.2 Group 1 Commands . . . . . . . . . . . . . . . . . . . . 138
6.2.1 Read Capacity Command (25
6.2.2 Read Extended Command (28
) . . . . . . . . . . . 139
H
) . . . . . . . . . . . 140
H
6.2.2.1 Sense Keys . . . . . . . . . . . . . . . . . . . . 141
6.2.3 Write Extended Command (2A
6.2.4 Seek Extended Command (2B
6.2.5 Write and Verify Command (2E
6.2.6 Verify Command (2F
) . . . . . . . . . . . . . . . . 145
H
6.2.7 Read Defect Data Command (37
6.2.8 Write Data Buffer Command (3B
) . . . . . . . . . . . 142
H
) . . . . . . . . . . . 143
H
) . . . . . . . . . . . 144
H
) . . . . . . . . . . 146
H
) . . . . . . . . . . 148
H
6.2.8.1 Write Combined Header and Data . . . . . . . . 149
6.2.8.2 Reserved . . . . . . . . . . . . . . . . . . . . . 149
6.2.8.3 Data Mode . . . . . . . . . . . . . . . . . . . . 150
6.2.8.4 Download Microcode and Save Mode . . . . . . 150
6.2.8.5 Write Data Buffer Header . . . . . . . . . . . . 151
6.2.9 Read Data Buffer Command (3C
) . . . . . . . . . . 151
H
6.2.9.1 Read Combined Header and Data . . . . . . . . 152
6.2.9.2 Reserved . . . . . . . . . . . . . . . . . . . . . 153
6.2.9.3 Data Mode . . . . . . . . . . . . . . . . . . . . 153
6.2.10 Read Long Command (3E
6.2.11 Write Long Command (3F
) . . . . . . . . . . . . . 154
H
) . . . . . . . . . . . . . 155
H
6.3 Group 2-4 Commands . . . . . . . . . . . . . . . . . . . 156
6.4 Group 5 and 6 Commands . . . . . . . . . . . . . . . . 156
ST3283N SCSI Interface Drive Product Manual, Rev. A xi
6.5 Group 7 Commands . . . . . . . . . . . . . . . . . . . . 156
6.5.1 Read Long Command (E5
6.5.2 Write Long Command (E6
6.5.3 Read Long Command (E8
6.5.4 Write Long Command (EA
) . . . . . . . . . . . . . 156
H
) . . . . . . . . . . . . . 157
H
) . . . . . . . . . . . . . 157
H
) . . . . . . . . . . . . . 157
H
7.0 Mode Pages . . . . . . . . . . . . . . . . . . . . . . . . . 159
7.1 Error Recovery Page . . . . . . . . . . . . . . . . . . . 160
7.2 Disconnect/Reconnect Page . . . . . . . . . . . . . . . 163
7.3 Format Device Page . . . . . . . . . . . . . . . . . . . 164
7.4 Rigid Disc Geometry Page . . . . . . . . . . . . . . . . 168
7.5 Caching Page . . . . . . . . . . . . . . . . . . . . . . . 170
7.6 Notch Page . . . . . . . . . . . . . . . . . . . . . . . . 174
7.7 Power Condition Page . . . . . . . . . . . . . . . . . . 176
7.8 Cache Control Page . . . . . . . . . . . . . . . . . . . . 179
7.9 Soft ID Page (EEPROM) . . . . . . . . . . . . . . . . . 180
7.10 Operating Page . . . . . . . . . . . . . . . . . . . . . 181
Appendix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
A.1 Seek Errors (09
A.2 Data Field Write Fault (03
A.3 Sync Byte Error (12
A.4 Data Field ECC Error (11
or 15H) . . . . . . . . . . . . . . . . . 183
H
) . . . . . . . . . . . . . . . 183
H
) . . . . . . . . . . . . . . . . . . . 184
H
or 18H) . . . . . . . . . . . . 184
H
A.5 Alternate Sector Processing . . . . . . . . . . . . . . . 184
xii ST3283N SCSI Interface Drive Product Manual, Rev. A
List of Fi gures
Figure 1: Typical Start-up Current Profile . . . . . . . . . . . . . . 10
Figure 2: Drive Mounting Orientations . . . . . . . . . . . . . . . . 13
Figure 3: Drive Dimensions . . . . . . . . . . . . . . . . . . . . . 15
Figure 4: Nonshielded Cable Connector . . . . . . . . . . . . . . . 18
Figure 5: Active Termination . . . . . . . . . . . . . . . . . . . . . 22
Figure 6: Single-Ended Transmitters and Receivers . . . . . . . . 23
Figure 7: Configuration Jumpers . . . . . . . . . . . . . . . . . . 26
Figure 8: External Spindle Clock Timing Diagram . . . . . . . . . . 27
Figure 9: Sample SCSI Configurations . . . . . . . . . . . . . . . 30
Figure 10: Phase Sequences with Arbitration . . . . . . . . . . . . 53
Figure 11: Phase Sequences without Arbitration . . . . . . . . . . 53
Figure 12: Single-Command Example . . . . . . . . . . . . . . . . 69
Figure 13: Disconnect Example . . . . . . . . . . . . . . . . . . . 69
Figure 14: Arbitration, Selection (without ATN), and Command
Phase . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Figure 15: Arbitration, Selection (with ATN), and Message Out . . . 72
Figure 16: Identify MSG Out to Command Phase . . . . . . . . . . 73
Figure 17: Command Descriptor Block Transfer . . . . . . . . . . 74
Figure 18: Command, Status, Command Complete Message,
and Bus Phase . . . . . . . . . . . . . . . . . . . . . . 75
Figure 19: Last Command Byte, Disconnect Message, Bus
Free and Reselection . . . . . . . . . . . . . . . . . . 76
ST3283N SCSI Interface Drive Product Manual, Rev. A xiii
Figure 20: Arbitration, Reselection, and Message In . . . . . . . . 77
Figure 21: Reselection, Status Phase, Command Complete and
Bus Free . . . . . . . . . . . . . . . . . . . . . . . . . 78
Figure 22: Last Command Byte to Data In Phase . . . . . . . . . 79
Figure 23: Last Command Byte to Data Out Phase . . . . . . . . 80
Figure 24: Reselect Identify Message to Data In Phase . . . . . . 81
Figure 25:Data In Block Transfer . . . . . . . . . . . . . . . . . . 82
Figure 26: Data Out Block Transfer . . . . . . . . . . . . . . . . . 83
Figure 27: Last Data Byte, Save Ptr. Message, and Disconnect
Message . . . . . . . . . . . . . . . . . . . . . . . . . 84
Figure 28: Data In, Status Phase, Command Complete
Message, and Bus Free . . . . . . . . . . . . . . . . . 85
Figure 29: Synchronous Read Timing . . . . . . . . . . . . . . . 86
Figure 30: Synchronous Write Timing . . . . . . . . . . . . . . . 87
Figure 31: Power Modes Flowchart . . . . . . . . . . . . . . . . . 178

ST3283N SCSI Interface Drive Product Manual, Rev. A 1
1.0 Specifications Summary
1.1 Formatted Capacity
Guaranteed megabytes 248.62
Guaranteed sectors 485,601
Bytes per sector 512
Interface Fast SCSI-2
Recording method RLL (1,7) (ZBR)
Spindle speed (RPM) 4,500 ± 0.5%
Discs 3
Servo heads 1
Read/write heads 5
Cylinders 1,691
Track density (TPI) 1,960
Recording density (BPI, max) 38,000
I/O data transfer rate
(Mbytes/sec , max)
Internal data transfer rate
(Mbits/sec)
Auto-parking heads Yes
The available capacity depends on the spare sector reallocation method
selected. The capacities specified here accommodate one spare sector
per cylinder and two spare cylinders per volume.
1.5 Asynchronous
10.0 Synchronous
15.0 to 24.4
2 ST3283N SCSI Interface Drive Product Manual, Rev. A
1.2 Drive Performance Specifications
1.2.1 Multi- Se gm en t Re ad Lo ok- Ahead Buffer
The Read Look-Ahead buffer improves performance by reading the next
logical sector after the previously read sector int o a buffer before those
sectors are actually requested by the host. Since the data is read before
it is requested, access read time is eliminated.
Read Look-Ahead stores data in the buffer from the start of a read until
the buffer segment is full. The 128K RAM buffer can be divided i nto
segments as follows:
Number of
Segments
1 128 8 16
264168
432324
Since each segment functions as an independent buffer, performance
dramatically increases in a multi-tasking or multi-user environment.
Read Look-Ahead occurs in a segment when a Read command is issued
that requests more data than is contained in one segment.
Caching occurs when a Read command requests less data than exists
in one segment. All requested dat a remains in the segment and Read
Look-Ahead will store more data in the buffer until it reaches the end of
the cylinder or the buffer segment is full.
Size of Segmen t
(in Kbytes)
Number of
Segments
Size of Segmen t
(in Kbytes)
1.2.2 Seek Time Definition and Specifications
Seek time is a true statistical average (at least 5,000 measurements) of
seek time less drive internal and external host overhead. All measurements are calculated under nominal conditions of temperature, voltage
and horizontal orientation.
Track-to-track seek time is the average of all possible single-track seeks
in both directions.
Average seek time is measured by executing seeks in both directions
between random cylinders.
ST3283N SCSI Interface Drive Product Manual, Rev. A 3
Full-stroke seek time is one-half the time needed to seek from the Logical
Block (LBA) 0 to the maximum LBA and back to LBA 0.
Track-to-Track
Seek Time
3.5 msec typ
4.0 msec max
Host overhead varies between systems and cannot be specified.
Note:
Drive internal overhead is measured by issuing a no-motion seek.
Overhead is typically less than 1.0 msec.
Average
Seek Time
12.0 msec typ
14.0 msec max
Full-Strok e
Seek Time
30.0 msec typ
32.0 msec max
Average
Latency
6.67 msec
1.2.2.1 Thermal Compe nsa tio n
The Thermal Compensation operation compensates for thermal-related
position offset on the selected head. Thermal Compensation is performed during startup and every 2 minutes thereafter. This periodic
compensation coincides with a host command service oper ation. The
last command execution time increases by 100 msec typical or 350 msec
maximum.
1.2.3 Format Drive
The maximum execution time for a format command is 20 minutes.
1.2.4 Start/S to p Time
After DC power has been applied, the drive becomes ready within 20
seconds (unless the Motor Start option is disabled). During this time the
drive responds to the SCSI interface. Stop time is 15 seconds, whether
the drive is commanded to spin down or power is removed.
If the Motor Start option is enabled, the internal controller accepts a Motor
Start, Inquiry or Request Sense command by the SCSI interface three
seconds after DC power has been applied. A fter the Motor Start c ommand has been received, the drive becomes ready for read/write operations within 15 seconds. During this time, the drive responds to the
SCSI interface.
Do not move the drive until the spindle motor has come to a
Note:
complete stop.
4 ST3283N SCSI Interface Drive Product Manual, Rev. A
1.2.5 Typical Power-Up/Power-Down Sequence
The following typical power-up/power-down sequence is provided to
assist in evaluating drive performance. This information is for reference
only.
There is no power control switch on the drive.
Note:
1.2.5.1 Power-Up Sequence
Power is applied to the disc drive.
1.
When power is applied, one of two sequences can occur:
2.
If the Motor Start jumper is not installed, the option is not
A.
selected. (See Figure 7.) In this case, the LED is on for about 2
seconds. Then, it t urns off while t he motor spins up. The drive
does not respond to the SCSI interface until the LED is off.
If the Motor Start jumper is installed, the option is selected. In
B.B.
this case, the LED glows when power is applied, and stops
glowing after two seconds. Then, the drive controller responds
to the SCSI interface. T he host commands the motor to start.
While the motor is coming up to speed, the LED is on.
The drive begins to lock in speed control circuits.
3.
The actuator lock solenoid releases the actuator, producing an
4.
audible sound.
The spindle motor reaches operating speed in about 5 s econds. After
5.
5 seconds, there are no speed variations.
The drive performs velocity adjustment seeks.
6.
The drive seeks Track 0 and becomes ready.
7.
1.2.5.2 Power-Down Sequ enc e
The power cable is unplugged from the driv e, or the driv e is com-
1.
manded to spin down.
Within 3 seconds after the motor begins to spin down, the actuator
2.
lock engages, producing an audible sound.
ST3283N SCSI Interface Drive Product Manual, Rev. A 5
The spindle stops in 15 seconds, whether the power cable is un-
3.
plugged from the drive or the drive receives the power-down command.
1.2.5.3 Read/Write Head Auto-Park
Upon power-down, the read/write heads automatically move to the
shipping zone. All portions of the head/slider ass embly park inboard of
the maximum data cylinder. When power is applied, the heads recalibrate
to Track 0.
1.3 Reliability
Read error rates are measured with automatic retries and data correction
with ECC enabled and all flaws reallocated. MTBF is measured at
nominal power, sea level, and 40 °C ambient temperature.
13
Nonrecoverable Read Errors 1 per 10
Seek Errors 1 per 10
MTBF 200,000 power-on hours
bits transferred
7
physical seeks
Preventative Maintenance Not Required
Service Life 5 Years
1.4 Physical Dimensions
Height 1.00 inches (25.4 mm)
Width 4.02 inches (102.1 mm)
Depth 5.77 inches (146.6 mm)
Weight 1.5 lbs (0.68 Kg)
1.5 Environmental
1.5.1 Ambient Temperature
Operating 5 °C to 55 °C (41 ° F to 131 ° F )
Nonoperating -40 °C to 70 °C (-40 °F to 158 °F)
6 ST3283N SCSI Interface Drive Product Manual, Rev. A
1.5.2 Temperatur e Gr adi ent
Operating 20 °C/hour (36 °F/hour)
Nonoperating 30 °C/hour (54 °F/hour)
1.5.3 Relative Humidity
Operating 8% to 80% Noncondensing
Maximum Wet Bulb 26 °C (79 °F)
Nonoperating 5% to 95% Noncondensing
1.5.4 Altitude
Operating - 1,000 ft to 10,000 ft (-305 m to 3,048 m)
Nonoperating -1,000 ft to 40,000 ft (-305 m to 12,192 m)
1.6 Acoustics
34 dBA typical sound pressure at 1 meter, in Idle mode.
38 dBA maximum sound pressure at 1 meter, in Idle mode.
1.7 Shock and Vibration
All shock and vib rat ion specif ica tions as sume th at the driv e is mount ed in
an approved orientation with the input levels measured at the drive mounting
screws. Shock measurement s are based on a 11 msec, half s ine-wave
shock pulse, not to be repeated more than two times per second.
During normal operating shock and vibration, there is no performance
degradation or physical damage to the drive.
During abnormal operating shock and vibration, there is no physical
damage to the drive, although performance may be degraded during the
shock or vibration episode. When normal operating shock levels resume,
the drive meets its performance specifications.
All nonoperating shock and vibration specifications assume that the
read/write heads are positioned in the shipping zone.
ST3283N SCSI Interface Drive Product Manual, Rev. A 7
Normal
Operating
Shock 2 Gs 10 Gs 75 Gs
5-22 Hz Vibration
22-500 Hz Vibration 0.50 Gs 1.50 Gs 4.00 Gs
0.020-inch
displacement
Abnormal
Operating
0.020-inch
displacement
Nonoperating
0.020-inch
displacement
1.8 DC Power
Except during the write procedure, power may be applied or removed in
any sequence without loss of data or damage to the drive. If you turn off
the power during the write procedure, you may lose the data cur rently
being written. A voltage tolerance of ± 5% must be maintained under all
conditions, including ripple.
In the table below, noise is specified as periodic and random distribution
of frequencies from DC to 25 MHz.
+5 VDC +12 VDC
Voltage Regulation ±5% ±5%
Noise Immunity
(Peak-to-Peak)
100 mV 240 mV
Interface commands and interface-selectable parameters are provided
to allow custom configuration of the power management system. The
available power modes are Standby, Spin-Up, Idle, Seeking, and
Read/Write. Transitions between Standby mode and Idle Mode (via Spin
Up mode) are controlled by both the power management confi guration
and the interface demands. Transitions between Idle mode, Read/Write
mode, and Seeking m ode are controlled solely by interface reques ts
(seeks, reads and writes).
8 ST3283N SCSI Interface Drive Product Manual, Rev. A
1.8.1 Power Mode Descriptions
The drive implements i ntelligent power management by automatically
changing power modes based on interface activity. This feature reduces
the average power consumption considerably from that required in a
drive without this feature. The modes are described below:
Spin-Up:
speed. Power in this mode i s defined as the average power during the
first 10 seconds after s tarting spin-up. This mode is entered from the
Standby mode.
Seeking:
heads to a specific location on the disc surface. Read/wri te electroni cs
are powered-down and servo electronics are active. Power used during
this mode is the average power measured while executing random seeks
with a 2-revolution (26.6 msec) dwell between seek commands.
Read/Write:
the disc medium. Read/writ e electronics are active and the ser vo is in
the track following mode. This mode is entered from the Idle mode.
Idle:
execute any command with no delay to become ready. The servo
electronics are active and t he heads are in track followi ng mode. The
read/write electronics are i n power down mode. This mode is entered
from any mode except the Standby mode.
Standby
all commands. However, a ready l atency will occur if any command is
received which requires disc access or actuator movement. The spindle
is at rest, and the servo and read/write electronics are powered-down.
This mode is entered from the Idle mode.
The drive is bringing the spindle and discs up to operating
The drive is moving the actuator to position the read/write
The drive is performing a read or write operation from or to
The spindle is up to operating speed and ready to accept and
: The drive is fully operational via the interface and will accept
ST3283N SCSI Interface Drive Product Manual, Rev. A 9
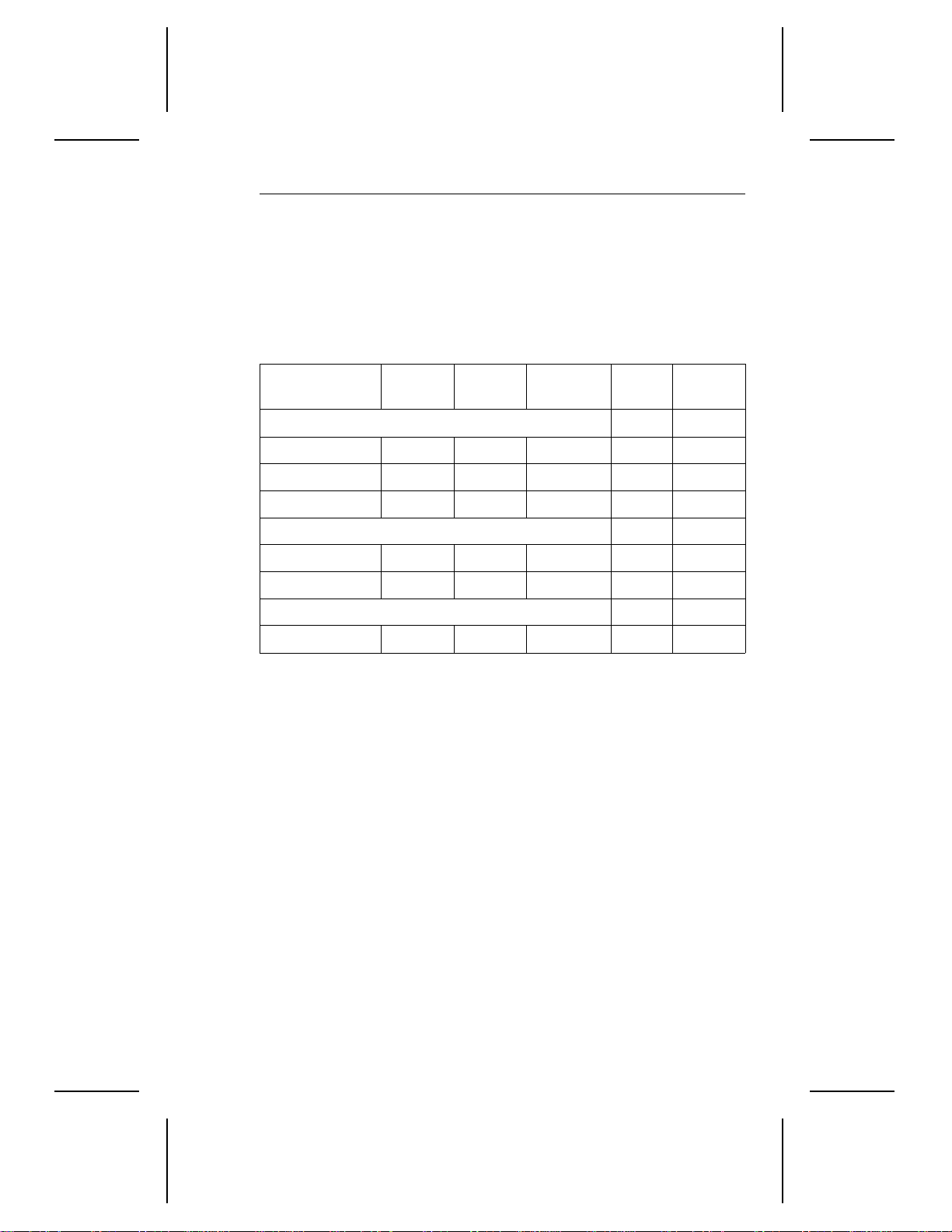
1.8.2 Power Consumption
In the table below, the values apply at the dri ve power connector and
assume that the terminating resistor packs are removed and terminator
power is supplied through the SCSI connector. All values are typical and
valid 10 minutes after the drive is spun up. Current is measured with an
RMS DC ammeter.
Spin Up Seekin g
Current at +12 VDC
Amps peak 1.9 N/A N/A N/A N/A
RMS Amps typ N/A 0.36 0.265 0.20 0.03
Watts typ N/A 4.32 3.18 2.40 0.36
Current at +5 VDC
RMS Amps typ N/A 0.136 0.464 0.07 0.06
Watts typ N/A 0.68 2.32 0.35 0.30
Power
Total Watts typ 7.00 5.00 5.50 2.75 0.66
Read/
Write
Idle Standby
10 ST3283N SCSI Interface Drive Product Manual, Rev. A
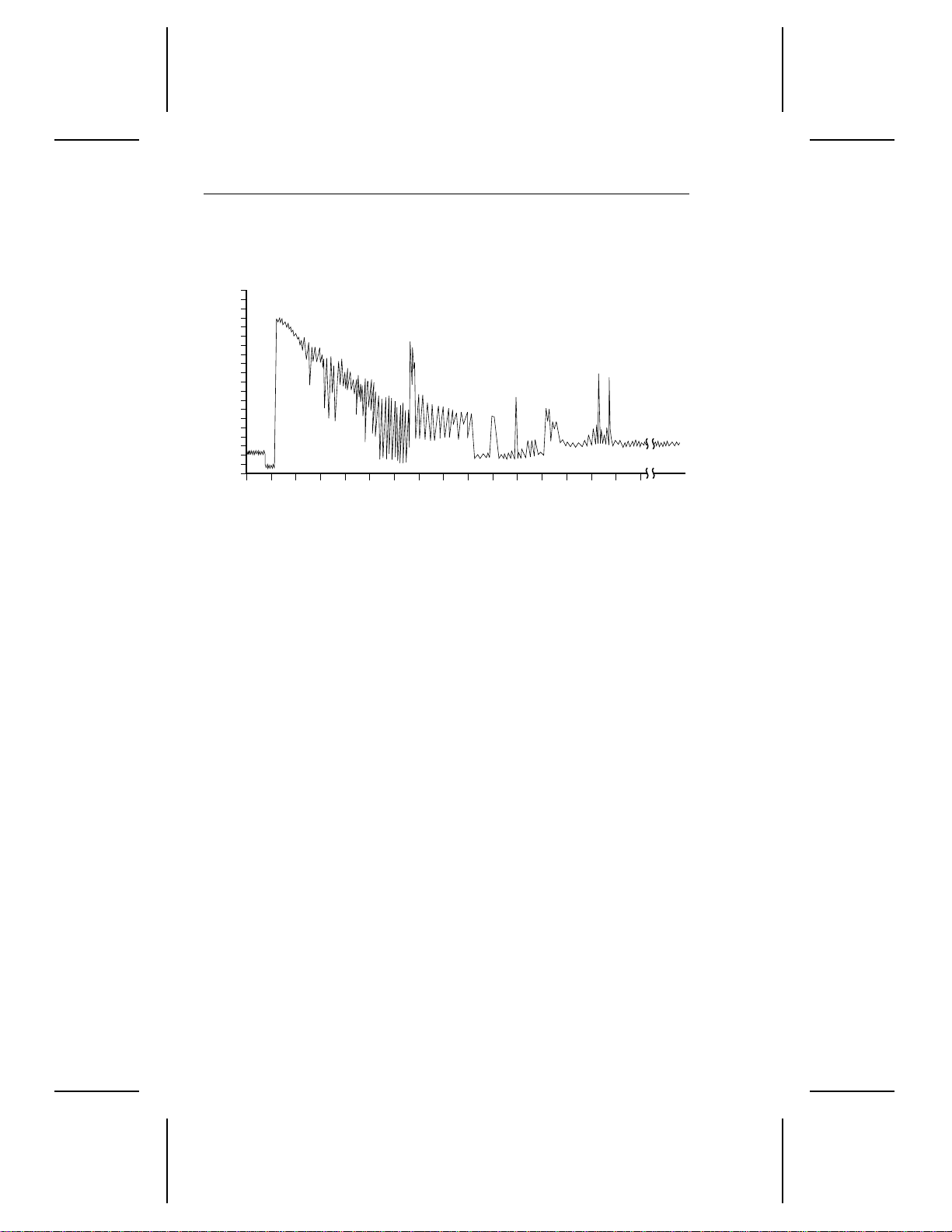
Figure 1: Typical Start-up Current Profile
2.0
1.7
1.0
+12V Current (Amps)
0
t1 Voltage is applied to the drive.
t 2
t 5
t 3
t 7
t 4
t 6
t 8
t 1
021436587
Time (Seconds)
t2
After a delay, the start-up current is applied and the spindle
begins to turn.
t3
The accelerating current is applied, causing the spindle speed
to increase.
t4
The spindle speed is close to the final, correct value. The
drive begins to lock in speed control circuits.
t5 The arm lock solenoid releases arm.
t6 The final speed control lock is achieved.
t7 The servo is calibrated.
t8 The servo locks in on Track 0 and the drive is ready.
ST3283N SCSI Interface Drive Product Manual, Rev. A 11
1.9 Agency Listings
1.9.1 UL Recognition
The ST3283N disc drive is recognized in accordance with UL 478 and
UL 1950.
1.9.2 CSA Listing
The ST3283N disc drive is certified to CSA C22.2 No. 220-M1986.
1.9.3 VDE Listing
The ST3283N disc drive is certified to VDE 0806/8.81 and
EN 60950/1.88, as tested by VDE.
1.9.4 FCC Verification
This equipment has been tested with a Class B com puting device
Note:
and has been found to comply with Part 15 of the FCC rules. These limits
are designed to provide reasonable protection agains t harmful interference in residential installat ions. This equipment generates, uses, and
can radiate radio frequency energy, and if not installed and used in
accordance with the instructions, may cause harmful interference to radio
communications. However, there i s no guarantee that interf erence will
not occur in a particular installation.
If this equipment does cause interference to radio or television equipment
reception, which can be determined by turning the equipment off and on,
the user may attempt t o correct t he i nterference by one or mor e of the
following measures:
• Reorient or relocate the receiving antenna.
• Move the equipment away from the receiver.
• Plug t he equipment into an outlet on a circuit different fr om that to
which the receiver is connected.
• If neces sary, the user should consult the dealer or an experienced
radio/television technician for additional suggestions.
12 ST3283N SCSI Interface Drive Product Manual, Rev. A
Caution:
expressly approved by the grantee or manufacturer could void the user’s
authority to operate such equipment.
Note:
noise emissions from digital apparatus as set out in the radio interference
regulations of the Canadian Department of Communications.
Le présent appareil numérique n′émet pas de bruits radioélectriques
dépassant les limites applicables aux appareils numériques de Classe B
prescrites dans le règlement sur le brouillage radioélectrique édicté par
le Ministère des Communications du Canada.
Any changes or modifications to the equipment by the user not
This digital apparatus does not exceed the Class B limits for radio
Sicherheitsa nleit un g
Das Gerrät ist ein Einbaugerät, das für eine maximale Umegebung-
1.
stemperatur von 55 °C vorgesehen ist.
Zur Befestigung des Laufwerks werden 4 Schrauben 6-32 UNC-2A
2.
benötigt. Bei seitlicher Befestigung darf die maximale Länge der
Schrauben im Chassis nicht mehr als 3,3 mm und bei Befestigung
an der Unterseite nicht mehr als 5,08 mm betragen.
Als Versorgungsspannugen werden benötigt:
3.
+5 V ± 5% 0,6 A
+12 V ± 5 % 0,8 A (2,0 A fur ca. 30 Sek)
Die Versorgungsspannung muβ SELV entsprechen.
4.
Alle Arbeiten dürfen nur von ausgebildetem Servicepersonal
5.
durchgeführt werden.
Der Einbau des Drives muβ den Anforderungen gemäβ DIN IEC
6.
950V DC 0806/8.81 entsprechen.
ST3283N SCSI Interface Drive Product Manual, Rev. A 13
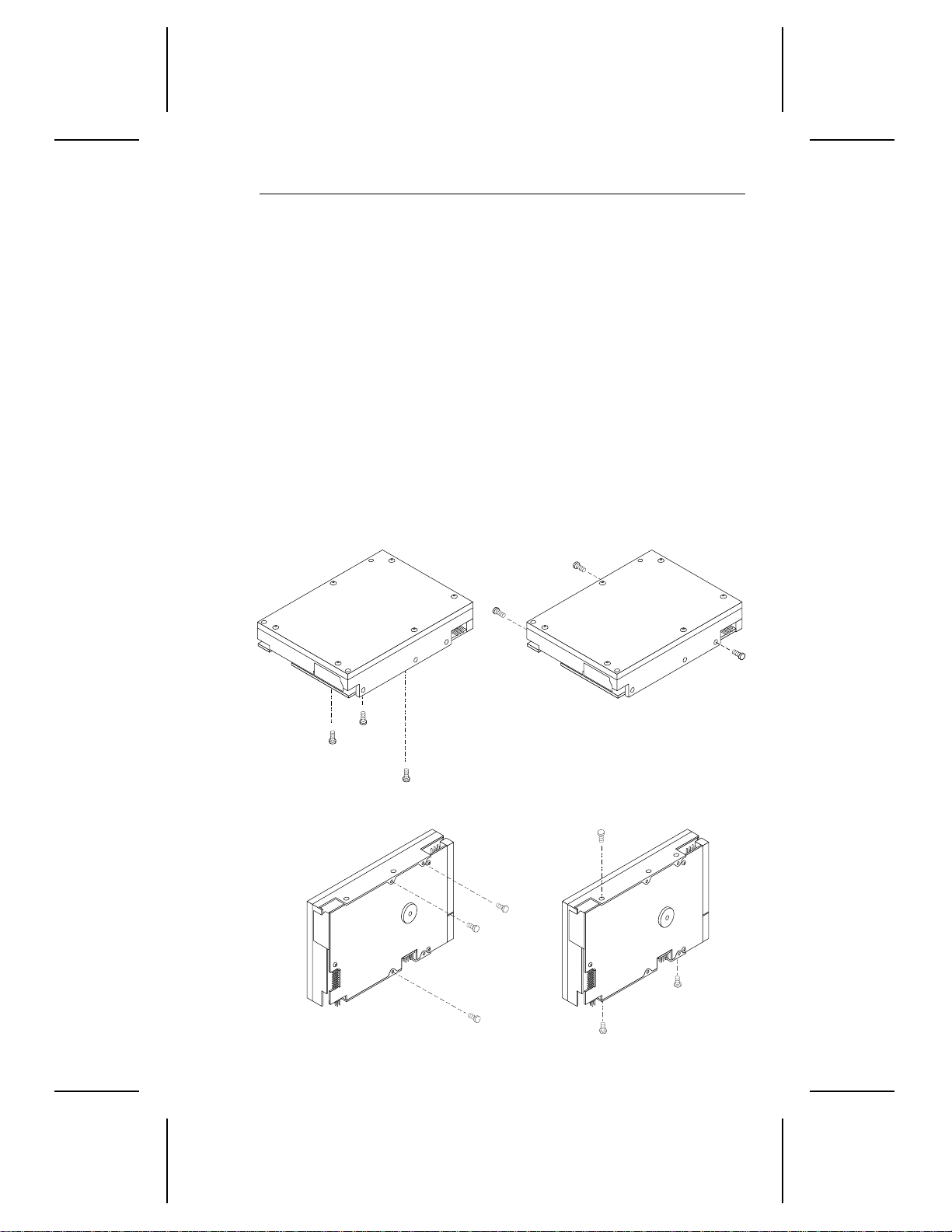
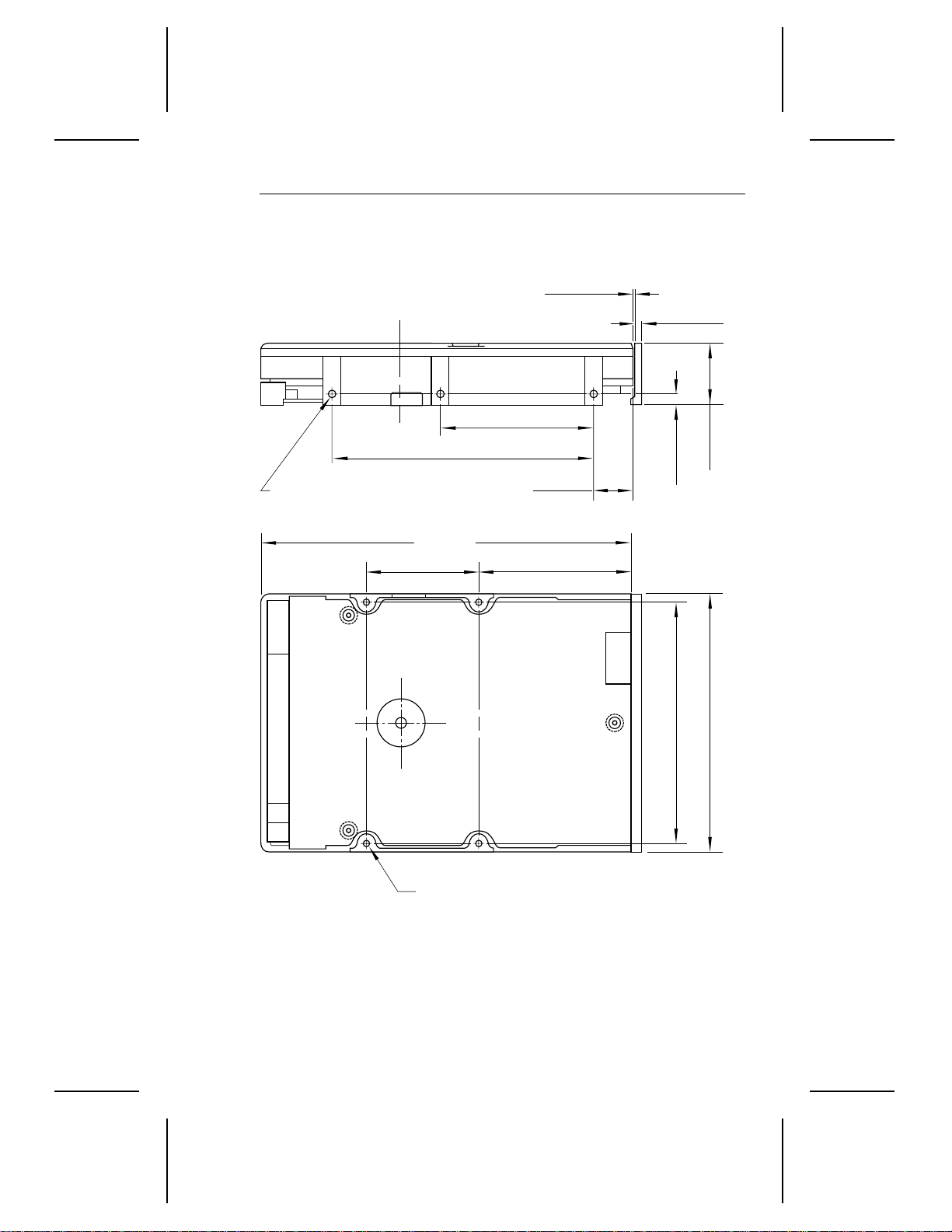
1.10 Drive Mounting
The drive may be mounted in any orientation using either t he side or the
bottom mounting holes; do not use side and bottom mounting holes in
combination. Use only three of the four available mounting holes. Refer
to Figure 2 for the recommended mounting orientations. Refer to Figure 3
for drive dimensions.
For optimum performance, the drive should be formatted in the same
orientation as it will be mounted in the host system.
Caution
drive or covered with additional labels. Removing factory labels may void
the warranty. Factory-installed labels contain information required when
servicing the product.
: Seagate factory-installed labels must not be removed from the
Figure 2: Drive Mounting Orientations
14 ST3283N SCSI Interface Drive Product Manual, Rev. A
1.10.1 Handling and Static Discharge Precautions
After unpacking the drive, and before you have installed the drive in the
system, be careful not to expose the drive t o handling or E SD hazards .
Observe the following standard static-discharge precautions:
• Wear a grounded wrist-strap.
• Handle the drive by its edges.
• Do not put any pressure on the top or bottom of the drive.
• Do not touch the PC board.
• Always r est the drive on a padded surface until it is mounted in the
host system.
1.10.2 Hot-pl ugging
If there is more than one SCSI device daisy-chained on the bus, you can
connect and disconnect the drive I/O and power connector if the following
conditions are met:
• The drive you are disconnecting (or connecting) is not the device
supplying terminator power or terminating resistance to the bus.
• Terminator power and resistance must not be added or removed
from the bus during hot-plugging.
• The bus m ust not be used for I/O transactions during hot-pluggi ng.
If you are installing a drive on the bus, there must be no I/O
transactions until the drive is connected and ready. If you are
removing a drive from the bus, there must be no I/O transactions until
the drive is completely disconnected.
To avoid damage to the disc and head, the spindle must be compl etely
stopped and the heads must be parked before you remove the drive from
the system. There are two ways to stop the spindle and park the heads:
• If t he drive is not configured to use the remote star t/stop feature,
disconnect the DC power cable from the drive DC power connector
and wait 30 seconds.
• If the drive is configured to use the remote start/stop feature, issue
the SCSI stop command and wait 30 seconds.
ST3283N SCSI Interface Drive Product Manual, Rev. A 15
Figure 3: Drive Dimensions
(0.030 ± 0.010)
0.150 ± 0.010
2.362 ± 0.010
6X 6-32 UNC-2B
Screw Length
into Side: 0.13 max
4.00 ± 0.02
5.77 max
1.750 ± .010
4 X 6-32 UNC-2B
Screw Length
into Bottom: 0.20 max
0.63 ± 0.02
2.375 ± .020
1.00 max
0.250 ± .010
4.02 max
3.750 ± .010
All Dimensions in Inches
16 ST3283N SCSI Interface Drive Product Manual, Rev. A
 Loading...
Loading...