

Page 1
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Elite 9 Disc Drive
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
ST410800N/ND
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
ST410800W/WD
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Product Manual, Volume 1
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Page 2

Page 3
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Elite 9 Disc Drive
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
ST410800N/ND
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
ST410800W/WD
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Product Manual, Volume 1
○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
Page 4

© 1994 Seagate Technology, Inc. All rights reserved
Publication number: 83328860, Rev. C
September 1994
Seagate®, Seagate Technology®, and the Seagate logo are registered
trademarks of Seagate Technology, Inc. Elite™, SeaFAX™, SeaFONE™,
SeaTDD™, and SeaBOARD™ are trademarks of Seagate Technology, Inc.
Other product names are registered trademarks or trademarks of their
owners.
Seagate reserves the right to change, without notice, product offerings or
specifications. No part of this publication may be reproduced in any form
without written permission from Seagate Technology, Inc.
Page 5

Revision status summary sheet
Sheets
Revision Date Writer/Engineer affected
A (preliminary-01) 10/30/93 L. Newman/L. Clausen All
A 12/10/93 L. Newman/L. Clausen All
B 05/18/94 L. Newman/L. Clausen All
C (preliminary-01) 07/21/94 L. Newman/L. Clausen All
C 09/23/94 L. Newman/L. Clausen 26, 41
Note. Product Manual 83328860 is Volume 1 of a two-volume
document with the SCSI interface information in the
SCSI-2 Interface Product Manual,
Part Number 77738479.
Volume 2
Page 6

Page 7

Contents
1.0 Scope ................................................................................................................................. 1
2.0 Applicable standard and reference documentation ....................................................... 3
2.1 Standards ..................................................................................................................... 3
2.2 Applicable reference documents................................................................................... 3
3.0 General description........................................................................................................... 5
4.0 Standard features.............................................................................................................. 7
4.1 Performance ................................................................................................................. 8
4.1.1 Reliability ............................................................................................................. 8
4.2 Unformatted and formatted capacities .......................................................................... 8
4.3 Options ......................................................................................................................... 8
4.4 Installation..................................................................................................................... 9
5.0 Performance-related characteristics and features ......................................................... 11
5.1 Internal drive characteristics ......................................................................................... 11
5.2 SCSI seek performance characteristics ........................................................................ 11
5.2.1 Seek time ............................................................................................................ 12
5.2.2 Format drive command execution time................................................................ 12
5.3 General performance characteristics ............................................................................ 13
5.4 Start/stop time............................................................................................................... 13
5.5 Prefetch/multi-segmented cache control ....................................................................... 14
5.5.1 Adaptive read lookahead..................................................................................... 15
5.6 Caching write data ........................................................................................................ 15
5.7 Synchronized spindle operation .................................................................................... 16
6.0 Reliability specifications................................................................................................... 19
6.1 Error rates..................................................................................................................... 19
6.1.1 Environmental interference.................................................................................. 19
6.1.2 Write errors ......................................................................................................... 19
6.1.3 Seek errors ......................................................................................................... 20
6.2 Reliability and service ................................................................................................... 20
6.2.1 Mean time between failures (MTBF).................................................................... 20
6.2.2 Air flow ................................................................................................................ 20
6.2.3 Preventive maintenance ...................................................................................... 23
6.2.4 Service life........................................................................................................... 23
6.2.5 Service philosophy .............................................................................................. 23
6.2.6 Installation ........................................................................................................... 23
6.2.7 Service tools........................................................................................................ 23
Page 8

vi Elite 9 Product Manual, Rev. C
7.0 Physical and electrical specifications............................................................................ 25
7.1 AC power requirements ............................................................................................ 25
7.2 DC power requirements ............................................................................................ 25
7.2.1 Conducted noise immunity ............................................................................ 27
7.2.2 Power sequencing......................................................................................... 27
7.2.3 +12V current profile ....................................................................................... 28
7.3 Heat/power dissipation.............................................................................................. 28
7.4 Environmental limits.................................................................................................. 29
7.4.1 Temperature.................................................................................................. 29
7.4.2 Relative humidity ........................................................................................... 29
7.4.3 Effective altitude (sea level)........................................................................... 29
7.4.4 Shock and vibration ....................................................................................... 29
7.4.5 Air cleanliness ............................................................................................... 31
7.4.6 Acoustics....................................................................................................... 31
7.5 Electromagnetic compatibility.................................................................................... 31
7.6 Mechanical specifications ......................................................................................... 32
7.6.1 Drive orientation ............................................................................................ 33
7.6.2 Cooling .......................................................................................................... 33
8.0 Media characteristics ...................................................................................................... 35
8.1 Media description...................................................................................................... 35
9.0 Defect and error management ........................................................................................ 37
9.1 Defects and errors .................................................................................................... 37
10.0 Option headers ................................................................................................................ 39
10.1 ST410800 option headers......................................................................................... 39
10.2 Synchronized spindles interface ............................................................................... 42
10.2.1 Electrical description...................................................................................... 42
10.3 Grounding................................................................................................................. 43
11.0 Interface requirements .................................................................................................... 45
11.1 General description................................................................................................... 45
11.2 SCSI interface messages supported......................................................................... 45
11.3 SCSI interface commands supported........................................................................ 46
11.3.1 Inquiry data.................................................................................................... 48
11.3.2 Mode sense data ........................................................................................... 49
11.4 SCSI bus conditions and miscellaneous features supported..................................... 51
11.5 Synchronous data transfer........................................................................................ 52
11.5.1 Synchronous data transfer periods supported .............................................. 52
11.5.2 REQ/ACK offset............................................................................................ 52
11.6 DC cable and connector ........................................................................................... 52
Page 9

Elite 9 Product Manual, Rev. C vii
11.7 SCSI physical interface............................................................................................. 53
11.7.1 Physical characteristics ................................................................................ 54
11.7.2 Connector requirements ............................................................................... 55
11.7.3 Electrical description..................................................................................... 55
11.8 SCSI physical interface............................................................................................. 59
11.8.1 Non-wide SCSI interface............................................................................... 59
11.8.2 Wide SCSI interface...................................................................................... 62
11.9 Disc drive SCSI timing .............................................................................................. 65
Index.......................................................................................................................................... 67
Figures
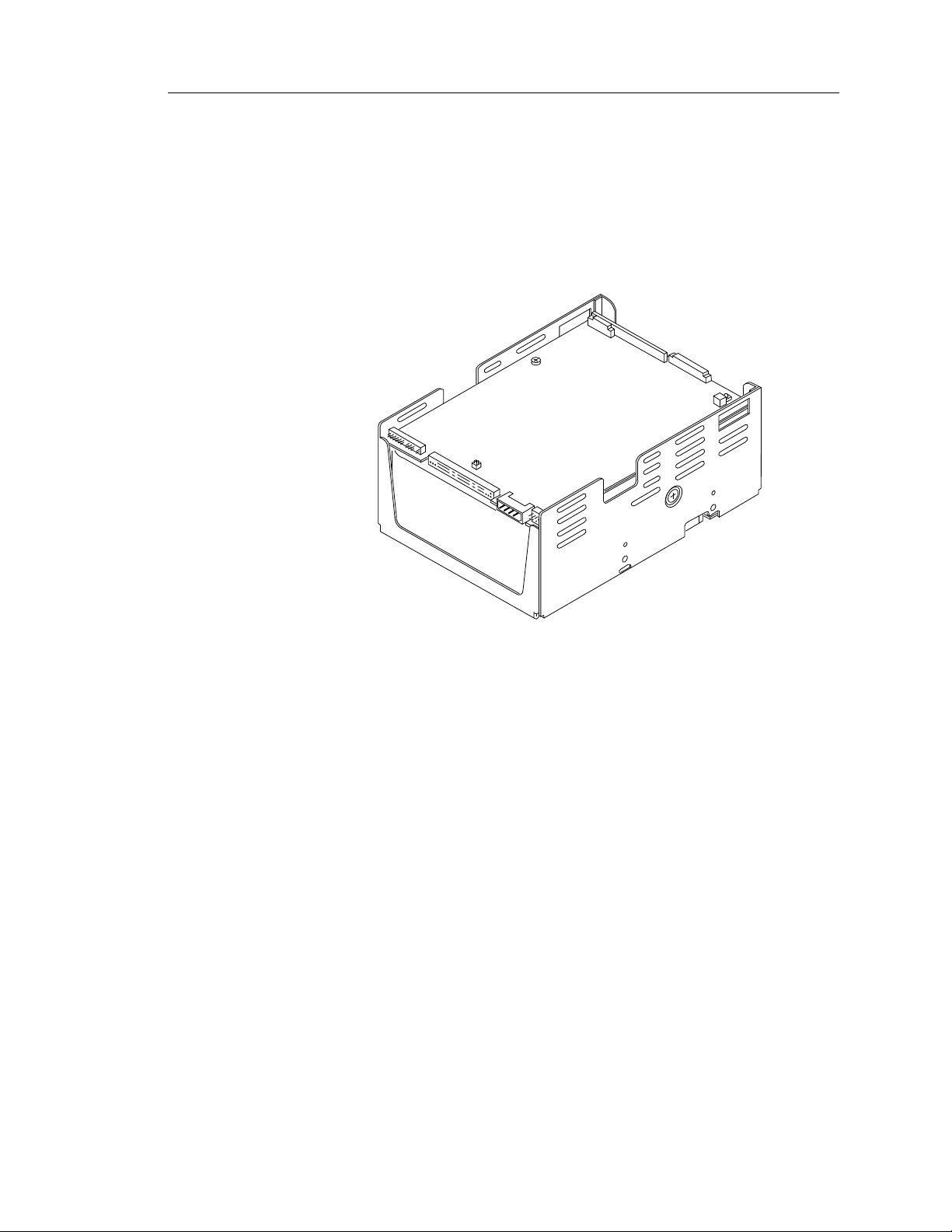
Figure 1. Elite 9 family disc drive .............................................................................................. 1
Figure 2. Elite 9 disc drive (exploded view)............................................................................... 5
Figure 3. OEM interruptible thermal calibration implementation ................................................ 12
Figure 4. Synchronized drive interconnect diagram .................................................................. 16
Figure 5. Synchronized reference signal characteristics........................................................... 17
Figure 6. Air-flow patterns......................................................................................................... 21
Figure 7. R/T/U/CYHX temperature measurement locations .................................................... 22
Figure 8. Elite 9 drive typical +12V current profile..................................................................... 28
Figure 9. Elite 9 drive typical mounting configuration dimensions ............................................. 32
Figure 10. Elite 9 drive recommended mounting......................................................................... 33
Figure 11. ST410800 option header locations ............................................................................ 39
Figure 12. Option select jumper connectors ............................................................................... 40
Figure 13. SCSI reference index signal driver/receiver combination........................................... 42
Figure 14. ST410800 configuration select header specification .................................................. 43
Figure 15. ST410800N/ND physical interface............................................................................. 53
Figure 16. ST410800W/WD physical interface ........................................................................... 53
Figure 17. Single-ended transmitters and receivers.................................................................... 56
Figure 18. Typical differential I/O line transmitter/receiver and terminators................................. 57
Figure 19. Terminating resistor locations for ND and WD drives ................................................ 58
Figure 20. Non-shielded non-wide SCSI device connector ......................................................... 59
Figure 21. Non-shielded wide SCSI device connector ................................................................ 62
Tables
Table 1. DC power requirements for ST410800N/ND drives ................................................... 25
Table 2. DC power requirements for ST410800W/WD drives.................................................. 26
Page 10

viii Elite 9 Product Manual, Rev. C
Table 3. SCSI messages supported ........................................................................................ 45
Table 4. Supported commands............................................................................................... 46
Table 5. Elite 9 family drives inquiry data................................................................................. 48
Table 6. Mode sense data, Elite 9 default values (SCSI-1 implementation)............................. 49
Table 7. Mode sense data, Elite 9 default values (SCSI-2 implementation)............................. 50
Table 8. SCSI bus conditions and other miscellaneous features ............................................. 51
Table 9. Synchronous data transfer periods ............................................................................ 52
Table 10. Single-ended cable pin assignments ......................................................................... 60
Table 11. Differential cable pin assignments ............................................................................. 61
Table 12. Single-ended P cable pin assignments ...................................................................... 63
Table 13. Differential P cable pin assignments .......................................................................... 64
Table 14. Disc drive SCSI timing ............................................................................................... 65
Page 11
Elite 9 Product Manual, Rev. C 1
1.0 Scope
This manual describes Seagate Technology®, Inc. Elite 9™ disc drives.
Elite 9 drives support the small computer system interface-2 (SCSI-2) as
described in the ANSI SCSI and SCSI-2 interface speci fications to the
extent described in this manual. The
(part number 77738479) describes general SCSI interface characteristics
of this and other families of Seagate drives
SCSI-2 Interface Product Manu al
Figure 1. Elite 9 family disc drive
Page 12

2 Elite 9 Product Manual, Rev. C
Page 13

Elite 9 Product Manual, Rev. C 3
2.0 Applicable standard and
reference documentation
Seagate takes all reasonable steps to ensure that its products are certifiable
to currently accepted standards. Typical applications of these disc drives
include customer packaging and subsystem design.
Safety agencies conditionally certify component parts, such as the Elite 9
disc drive, based on their final acceptability in the end-use product. The
subsystem designer is responsible for meeting these conditions of acceptability in obtaining safety/regulatory agency compliance in their end-use
product and certifying where required by law.
2.1 Standards
The Elite 9 disc drive is a UL recognized component per UL1950, CSA
certified to CSA C22.2 No. 950-M89, and VDE certified to VDE 0805 and
EN60950.
The Elite 9 disc drive is supplied as a component part. It is the responsibility
of the subsystem designer to meet EMC/regulatory requirements. Engineering test characterizations of radiated emissions are available from the
Seagate safety department.
2.2 Applicable reference documents
Elite 9 Installation Guide
Seagate part number: 83328850
SCSI-2 Interface Product Manual (volume 2)
Seagate part number: 77738479
ANSI small computer system interface (SCSI) documents
ANSI X3.131-1986 (SCSI-1)
X3T9.2/86-109 Rev. 10H (SCSI-2)
X3T9.2/91-010 Rev. 10 (SCSI-3) Parallel Interface
In case of conflict between this document and any referenced document, this
document takes precedence.
Page 14

4 Elite 9 Product Manual, Rev. C
Page 15
Elite 9 Product Manual, Rev. C 5
3.0 General description
Elite 9 drives are high capacity, high-performance, highly reliable randomaccess storage devices designed to meet the needs of the original equipment manufacturer (OEM) marketplace.
Elite 9 disc drives have an embedded SCSI controller. Performance information is provided in Section 5.
The Elite 9 drive’s interface supports multiple initiators, disconnect/reconnect, self-configuring host software, and automatic features that relieve the
host from knowing the physical characteristics of the targets (logical block
addressing is used).
The head and disc assembly (HDA) is sealed at the factory. Air circulates
within the HDA through a non-replaceable filter to maintain a contaminationfree HDA environment.
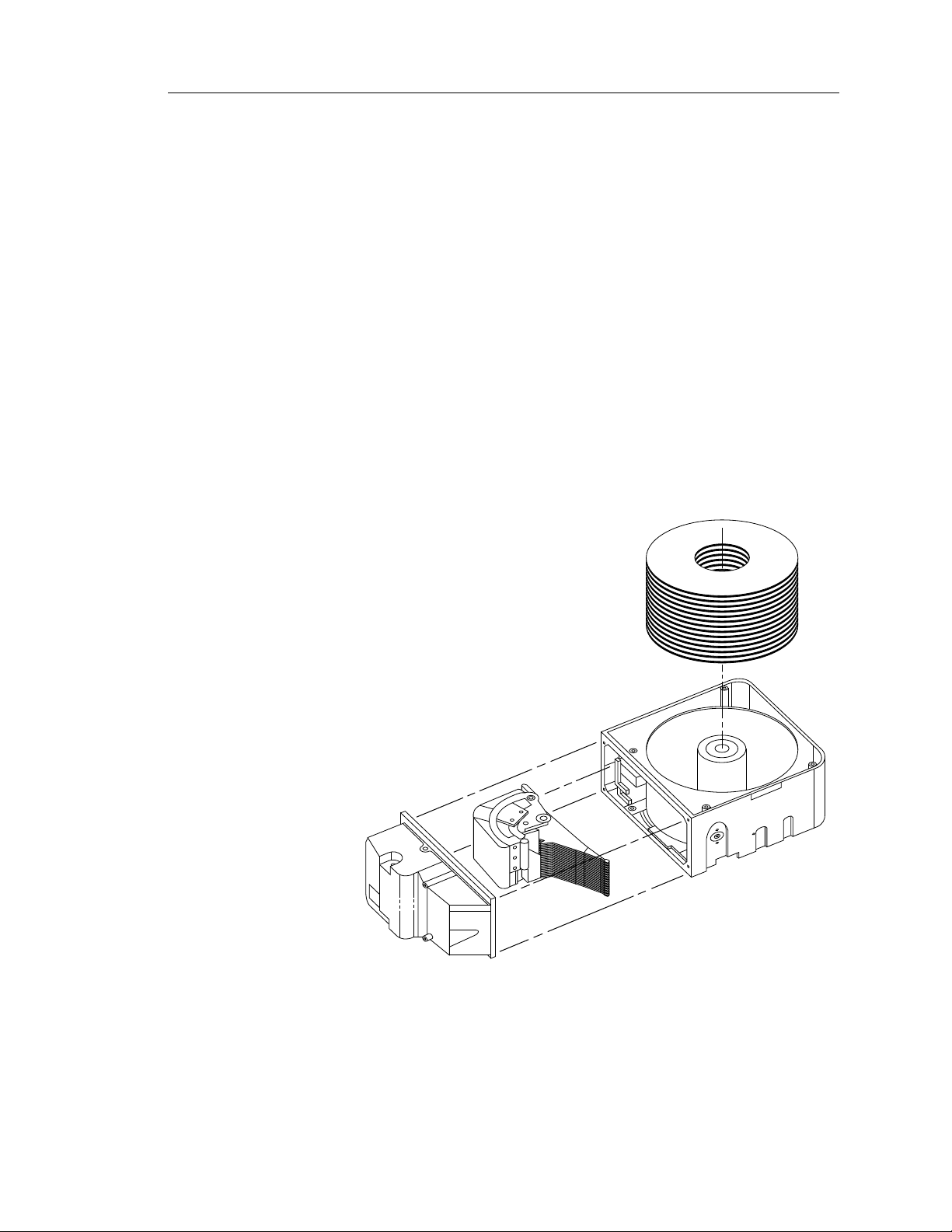
Refer to Figure 2 for an exploded view of the drive. This exploded view is for
information only—never disassemble the HDA and do not attempt to service
items in the sealed enclosure (heads, media, actuator, etc.) as this requires
special facilities. The drive contains no replaceable parts. Opening the HDA
voids your warranty.
Figure 2. Elite 9 disc drive (exploded view)
Page 16

6 Elite 9 Product Manual, Rev. C
Elite 9 drives use a dedicated landing zone at the innermost radius of the
media to eliminate the possibility of destroying or degrading data by landing
in the data zone. The drive automatically goes to the landing zone when the
power is removed.
An automatic shipping lock prevents potential damage to the heads and
discs. The shipping lock disengages when power is applied to the drive and
the head load process begins.
Elite 9 drives decode track 0 location data from the dedicated servo surface
to eliminate mechanical transducer adjustments and related reliability
concerns.
A high-performance actuator assembly with a low-inertia, balanced, patented, straight-arm design provides excellent performance with minimal
power dissipation.
Page 17

Elite 9 Product Manual, Rev. C 7
4.0 Standard features
Elite 9 drives have the following standard features:
• Integrated SCSI controller
• Single-ended or differential SCSI drivers and receivers
• Non-shielded 50-pin connector
• Initiator/target terminator power option
• SCSI bus parity with full parity pass-through
• SCSI disconnect/reconnect support
• Multiple SCSI initiator support
• SCSI-2 command set support
• Synchronous SCSI bus data transfer protocol (maximum offset of 15)
• 10.0 Mbytes/sec SCSI bus transfers (minimum period 100 nsec)
• 20.0 Mbytes/sec SCSI bus wide transfers (ST410800W/WD models)
• 954 Kbyte data buffer
• Cache buffer management
• User-selectable logical block size (180 to 4,096 bytes)
at even-number intervals
• ECC (error correction code) on the fly
• User-selectable automatic defect reallocation scheme
• User-selectable number of spare sectors per cylinder
• Industry standard 5.25-inch full-high form factor dimensions
(3.25 high × 5.75 wide × 8.00 deep)
• Microcode downloadable using the Write Data Buffer command
• Asynchronous and synchronous data-transfer protocols
• Firmware downloadable using a SCSI interface
• Programmable sector-reallocation scheme
• Flawed sector reallocation at format time
• Programmable auto-write and auto-read reallocation
• Reallocation of defects on command (Reassign Block command)
• 96-bit and Reed-Solomon error correction code
• Sealed head and disc assembly (HDA)
• No preventive maintenance or adjustments required
• Dedicated head-landing zone
• Automatic shipping lock
• Automatic thermal compensation
• Embedded Grey Code track address to eliminate seek errors
• Self-diagnostics performed at power-on
• 1:1 interleave
• Zone bit recording (ZBR)
• Vertical, horizontal, or top-down mounting
• Dynamic spindle brake
• Active internal termination (ST410800N/W models)
Page 18

8 Elite 9 Product Manual, Rev. C
4.1 Performance
• Programmable multi-segmentable cache buffer
• 5,400 RPM spindle; average latency = 5.55 msec
• Command queuing of up to 64 commands
• Background processing of queue
• Supports start and stop commands
• Provides synchronized spindle capability
• Low audible noise for office environment
• Low power consumption
4.1.1 Reliability
• 500,000 hour MTBF
• Adaptive seek velocity; improved seek performance
• LSI circuitry
• Balanced low-mass rotary voice-coil actuator
4.2 Unformatted and formatted capacities
Standard OEM models are formatted to have 512-byte sectors.
Elite 9 drives have one (1) spare cylinder per unit and 9 spare sectors per
cylinder. You may select the number of spare sectors per cylinder to meet
your specific needs.
Formatted Unformatted
9,090 Mbytes 10,800 Mbytes
Users having the necessary equipment may modify the data block size
before issuing a format command to obtain different formatted capacities.
User-available capacity also depends on the spare reallocation scheme
selected. See the Mode Select command and the Format command in the
SCSI-2 Interface Product Manual
4.3 Options
The following options are incorporated at the time of production or are
available separately. All kits may be installed in the field.
• Front panel
The standard front panel is black plastic; you may order other colors. The
panel has a single rectangular green LED indicator lens that, when
glowing, indicates the drive is selected.
Front panel kit with green lens, part number 70553702
Front panel kit with red lens, part number 705537012
• Two pin shunt jumpers, 2 mm, part number 97630051
• External terminator, single-ended, shielded, part number 15387797
• External terminator, single-ended, unshielded, part number 15387807
• Internal terminator, differential, part number 15479501
• Single-unit shipping pack
The drive is shipped in bulk packaging to provide maximum protection
against transit damage. Units shipped individually require a dditional
protection as provided by the single-unit shipping pack. Users planning
single-unit distribution should specify this option.
(part number 77738479).
Page 19

Elite 9 Product Manual, Rev. C 9
• Shielded SCSI I/O cable
1.5 foot cable, part number 47191159
5 foot cable, part number 47191151
15 foot cable, part number 47191152
20 foot cable, part number 47191153
40 foot cable, part number 47191164
80 foot cable, part number 47191154
•
Elite 9 Installation Guide,
This manual provides basic installation information for persons not
familiar with the product. It also includes information on obtaining technical support and service for the drive.
part number 83328850
4.4 Installation
For option jumper locations and definitions refer to Section 10. Drive default
mode parameters are not normally needed for installation. Refer to
Section 11.3.2 for default mode parameters if you need them.
• Ensure that the SCSI ID of the drive is not the same as the host adapter.
• If multiple devices are on the bus, set the drive’s SCSI ID to one that is not
presently used by other devices on the bus.
• If the drive is the only device on the bus, attach it to the end of the SCSI
bus cable. ST410800N and ST410800W drives have termination built in
(ensure that the internal terminator has not been disconnected—see
Section 10.1 for termination options). ST410800ND and ST410800WD
drives are terminated internally with terminators in the sockets provided
next to the SCSI I/O connector. The terminator part number is 15479501.
• If you attach the drive to a bus that contains other devices, and the new
drive is not attached to the end of the bus, remove termination from the
new drive. To remove (disconnect) termination from ST410800N and
ST410800W drives, remove the jumper from pins 19 and 20 of J4A (see
Figure 12). To remove termination from ST410800ND and ST410800WD
drives, remove the terminators from the sockets located next to the SCSI
I/O connector (see Section 11.7.3.3).
• Set all appropriate option jumpers before applying power to the drive. If
you change jumpers after applying power, recycle the drive’s power to
make the new settings effective.
Formatting
• It is not necessary to low-level format this drive. The drive is shipped from
the factory low-level formatted in 512-byte sectors.
• Reformat the drive if:
a. You select a different sector size.
b. You select a different spare-sector allocation scheme.
Page 20

10 Elite 9 Product Manual, Rev. C
Page 21
Elite 9 Product Manual, Rev. C 11
5.0 Performance-related characteristics
and features
This section provides performance-related characteristics and features of
Elite 9 drives.
5.1 Internal drive characteristics
Drive capacity, Mbytes unformatted 10,800
Read/write data heads 27
Bytes per track, average 77,700
Bytes per surface, Mbytes unformatted 400
Cylinders/tracks per surface, user accessible 4,925
Tracks per inch 3,921
Servo heads 1
Internal data rate, Mbits/sec, variable with zone 44 to 65
Disc rotation speed 5,400 ± 0.5%
Average rotational latency, msec 5.55
5.2 SCSI seek performance characteristics
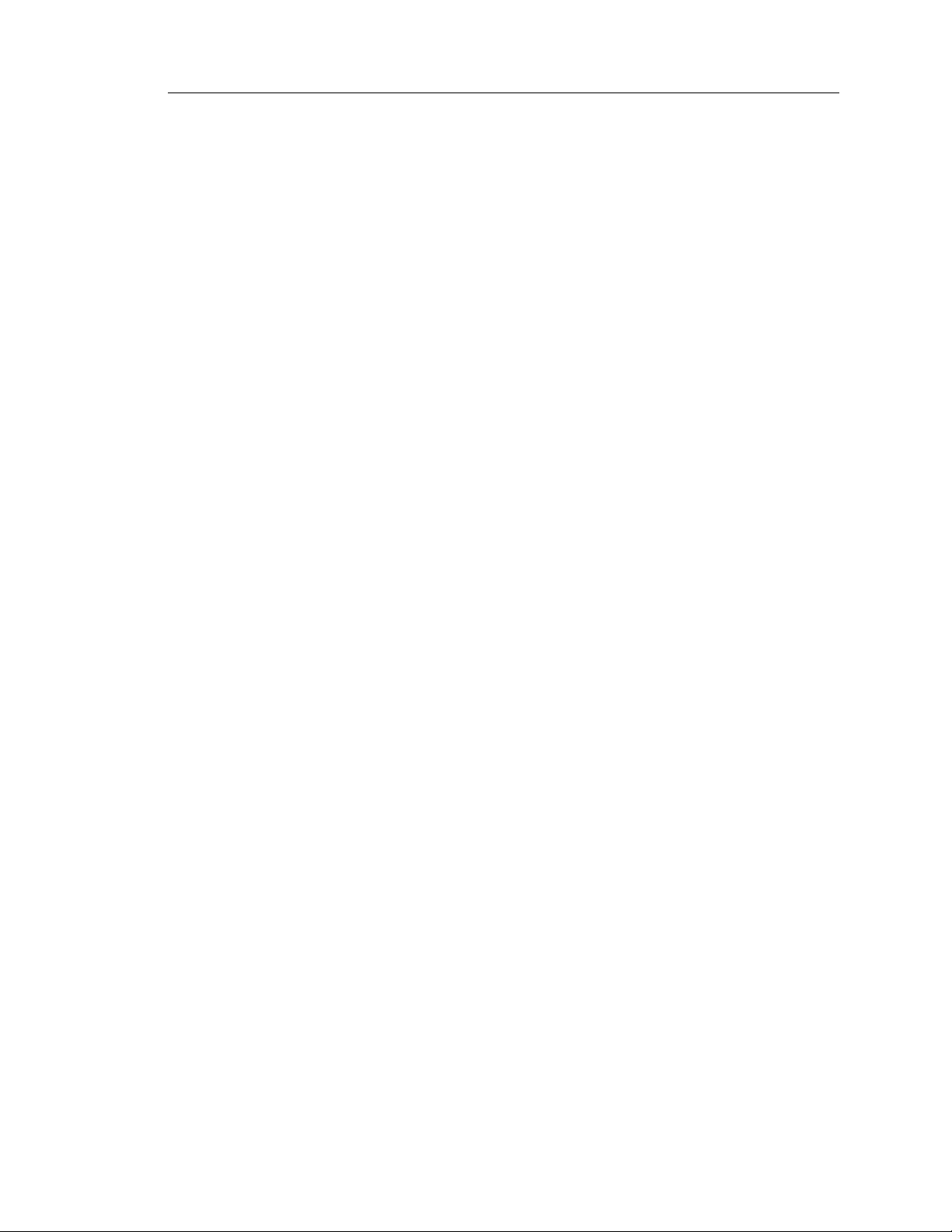
All performance characteristics assume that automatic adaptive thermal
compensation is not in process when the drive receives the SCSI command.
Automatic adaptive thermal compensation will not interrupt an active SCSI
command. If adaptive thermal compensation is in process when a SCSI
command is received, the command is queued until compensation
completes. When compensation completes for the head, the first queued
SCSI command executes, and the drive continues compensation for the
remaining head(s).
The above procedure continues until compensation for all heads has
completed, or until 10 minutes have elapsed. The drive initiates an automatic
adaptive thermal compensation cycle once on power-up before completing
its initialization sequence, once after 1 minute from the end of initialization,
and then once approximately every 10 minutes. Automatic thermal
compensation occurs at other times but should be transparent to the user
(e.g., during format, at Re-Zero command, at spindle-up, during read-error
recovery, and during reassign-bloc k functions). You can use the Re-Zero
command to reset the thermal compensation timer to its start to let the host
know when the interruption for thermal compensation will occur.
Refer to Section 11.9 and to the
number 77738479) for additional timing details.
SCSI-2 Interface Product Manual
(part
Page 22
12 Elite 9 Product Manual, Rev. C
Start
Has
10 min.
timer
expired?
Set
10 minute
timer
Yes
No
Yes
A
Is
SCSI
command in
progress?
No
Complete
Command
Seek to
TCAL cyl
and select
head zero
TCAL
head
Has
target
received a SCSI
command?
No
Yes
All
heads
calibrated?
Yes
A
All
heads
calibrated?
No
Yes
Select
next
head
No
Has
target
received a SCSI
command?
Yes
No
Target
completes
SCSI
command
Seek to
TCAL cyl
and select
next head
Figure 3. OEM interruptible thermal calibration implementation
5.2.1 Seek time
Drive level (msec) without disconnect* (msec)
read write read write
Avg typical** 11 12 12.5 13.5
Single track typ** 0.9 1.7 2.4 3.2
Full stroke typ** 23 24 24.5 25.5
* Measured from the start of the first sector transfer to or from the host.
** Typical seek values are measured under nominal conditions of tempera-
ture, voltage, and horizontal orientation on a representative sample of
drives.
5.2.2 Format drive command execution time
≥≥
≥ 512-byte sectors
≥≥
for
Maximum (with verify) 4 hours
Maximum (without verify) 2 hours
Drive including
controller overhead
Page 23

Elite 9 Product Manual, Rev. C 13
5.3 General performance characteristics
Minimum sector interleave 1:1
Data buffer to/from disc media 960 Kbytes
Data transfer rate (≤ 1 sector)
Minimum 5.67 Mbytes/sec*
Maximum 8.3 Mbytes/sec*
Data transfer rate (< 1 track)
Minimum, divided by interleave factor 4.75 Mbytes/sec
Maximum, divided by interleave factor 6.46 Mbytes/sec
SCSI interface data
Asynch. transfer rate non-wide, max instantaneous 10 Mbytes/sec*, **
Asynch. transfer rate wide, max instantaneous 20 Mbytes/sec*, ***
Synchronous transfer rate fast 0.5 to 10 Mbytes/sec
Synchronous transfer rate wide 5.0 to 20 Mbytes/sec
Sector size
Default 512-byte data blocks
Variable in even-sector sizes 180 to 4,096 bytes
Read/write consecutive sectors on a track Yes
Flaw reallocation performance impact
Spare sectors per track reallocation Negligible
Spare sectors per cylinder reallocation Negligible
Spare tracks per volume reallocation 35 msec (typical)
Overhead time for head switch 0.8 msec
Overhead time for one-track cylinder switch 1.8 msec (typical)
Average rotational latency 5.55 msec
* Rate measured from the s tart of the fi rst sector transfer to or from the host.
** Assumes system ability to support 10 Mbytes/sec and no cable loss.
***Assumes system ability to support 20 Mbytes/sec and no cable loss.
5.4 Start/stop time
Disabling the Motor Start option causes the motor to start as soon as power
is applied, causing the drive to become ready within 30 seconds after DC
power is applied at nominal voltage. If a recoverable error condition is
detected during the start sequence, the drive executes a recovery procedure
which may cause the drive to become ready in excess of 30 seconds. During
the start sequence the drive responds to some commands over the SCSI
interface. Stop time is less than 30 seconds (maximum) from removal of DC
power.
Enabling the Motor Start option causes the internal controller to accept the
commands listed in the
than 3 seconds after applying DC power. After receiving the Motor Start
command, the drive becomes ready for normal operation within 30 seconds
(excluding the error recovery procedure). The Motor Start command can also
be used to command the drive to stop the spindle (see the Start/Stop
command information in the
SCSI-2 Interface Product Manual
SCSI-2 Interface Product Manual
(77738479) less
).
There is no power control switch on the drive.
Page 24

14 Elite 9 Product Manual, Rev. C
5.5 Prefetch/multi-segmented cache control
The drive provides a prefetch/multi-segmented cache algorithm, which in
many cases enhances system performance. To select this feature, the host
sends the Mode Select command with the proper values in the applicable
bytes in page 08h (see the
prefetch and cache operation enabled.
Of the 1,024 Kbytes physical buffer space, approximately 960 Kbytes can be
used as a cache. The cache can be divided into logical segments from which
data is read and to which data is written.
The drive keeps track of the logical block addresses of the data stored in each
segment of the cache. If the cache is enabled (see RCD bit, Table 5.2.1-27
in the
SCSI-2 Interface Product Manual),
read command is retrieved from the cache before any disc access is initiated.
Data in contiguous logical blocks immediately beyond that requested by the
Read command can be retrieved and stored in the cache for immediate
transfer to the initiator on subsequent read commands. This is referred to as
the prefetch operation. Since data that is prefetched may replace data
already in the cache segment, an initiator can limit the amount of prefetch
data to optimize system performance. The drive never prefetches more
sectors than the number specified in bytes 8 and 9 of Mode page 08h (see
the
SCSI-2 Interface Product Manual
Kbytes of the buffer are used as a circular buffer for read/writes, with no
prefetch operation and no segmented cache operation.
SCSI-2 Interface Product Manual
data requested by the host with a
). If the cache is not enabled, 960
). Default is
The following is a simplified description of the prefetch/cache operation:
Case A. A read command is received and the first logical block is already in
the cache.
1. The drive transfers to the initiator the first logical block requested plus all
subsequent contiguous logical blocks that are already in the cache. This
data may be in multiple segments.
2. When a requested logical block is reached that is not in any segment,
the drive fetches it and any remaining requested logical block addresses
from the disc and puts them in a se gment of the c ache. The d rive
transfers the remaining requested logical blocks from the cache to the
initiator in accordance with the “buffer-full” ratio specification given in
Mode Select Disconnect/Reconnect parameters, page 0 2h (see the
SCSI-2 Interface Product Manual
3. The drive prefetches additional logical blocks contiguous to those
transferred in step 2 above and stores them in the segment. The drive
stops filling the segment when the maximum prefetch value has been
transferred (see the
Case B. A read command is received and the first logical block address
requested is not in any segment of the cache.
1. The drive fetches the requested logical blocks from the disc and
transfers them into a segment, then from there to the initiator in
accordance with the “buffer-full” ratio specification given in Mode Select
Disconnect/Reconnect parameters, page 02h (see the
face Product Manual
SCSI-2 Interface Product Manual
).
).
).
SCSI-2 Inter-
Page 25

Elite 9 Product Manual, Rev. C 15
2. The drive prefetches additional logical blocks contiguous to those transferred in Case A, step 2 above and stores them in the segment. The drive
stops filling the segment when the maximum prefetch value has been
transferred.
During a prefetch, the drive crosses a cylinder boundary to fetch data only
if the Discontinuity (DISC) bit is set to 1 in bit 4 of byte 2 of the Mode Select
parameters page 8h. De fault is zero for bit 4 (see the
Product Manual
Each cache se gment i s actually a self-contained circular buffer whose
length is an integer number of sectors. The drive supports operation with any
integer number of segments 1 to 16. Divide the 960 bytes in the buffer by the
number of segments to get the segment size; default is 3 segments (see the
SCSI-2 Interface Product Manual
individual segments greatly enhances the cache’s overall performance,
allowing a wide range of user-select able configurations including a pure
prefetch strategy.
).
). The wrap-around capability of the
SCSI-2 Interface
5.5.1 Adaptive read lookahead
Read lookahead causes the drive to continue reading data from the disc
following a normal read I/O until the read-ahead parameters are satisfied
(prefetch). If subsequent I/O requests can be satisfied from the prefetched
data in the data buffer, there is a significant improvement in performance
since a disc access is eliminated. If subsequent I/O requests cannot be
satisfied from the prefetched data, there is a reduction in performance due
to prefetch overhead.
The adaptive read lookahead feature suspends the prefetch operation if
three subsequent read I/O requests are not satisfied from the prefetched
data. This improves performance because unnecessary prefetches are
avoided. Prefetch is reinstated if an I/O request is sequential to a previous
I/O request.
5.6 Caching write data
Write caching is a drive-write operation, which uses a drive’s buffer storage
where data to be written to the disc is stored while the drive performs the Write
command.
Write caching is enabled along with read caching. Default is cache enabled.
For write caching, the same buffer space and segmentation is used as set
up for read functions. When a write command is issued, the cache is first
checked to see if any logical blocks to be written are already stored in the
cache from a previous read or write command. If there are, the respective
cache segments are cleared. The new data is cached for subsequent read
commands.
If a 10-byte CDB write command (2Ah) is issued with the Data Page Out
(DPO) bit set to 1, no write data is cached, but the cache segments are still
checked and cleared, if needed, for any logical blocks that are being written
(see the
If the number of write data logical blocks exceeds the size of the segment
being written into when the end of the segment is reached, data is written into
the beginning of the same cache segment, overwriting data that was written
there at the beginning of the operation. However, the drive does not overwrite
data that has not yet been written to the disc.
SCSI-2 Interface Product Manual
).
Page 26
16 Elite 9 Product Manual, Rev. C
Master Sync
Source
Host
(or other drive)
Spindle
Control
Drive 1
+5V
R
T
J4A
24
23
Spindle
Control
Drive 2
+5V
R
T
J4A
24
23
Spindle
Control
Drive n
+5V
R
T
J4A
24
23
Sync Interface
System
Interface
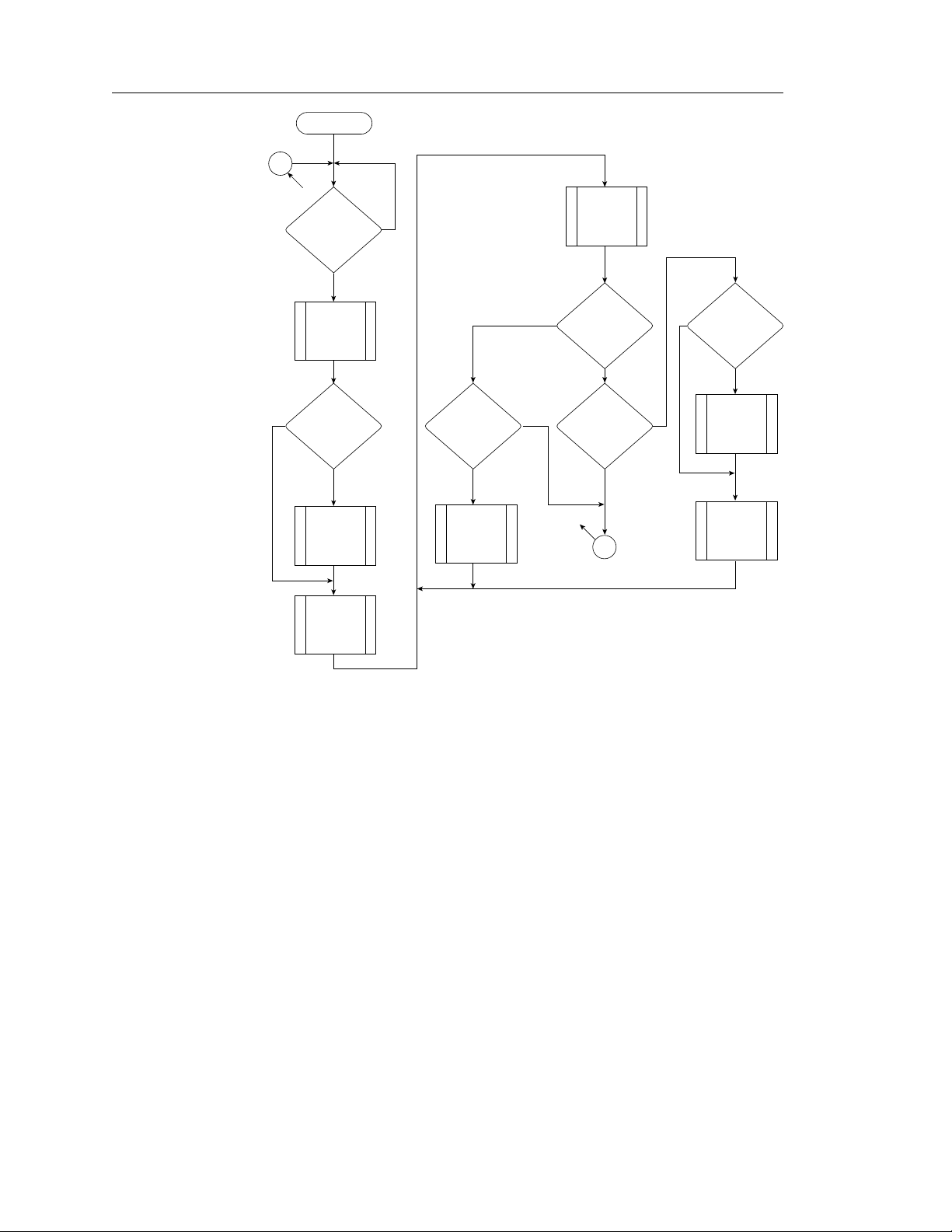
5.7 Synchronized spindle operation
The synchronized spindle operation allows several drives operating from
the same host to operate their spindles at the same synchronized rotational
rate. Drives operating in a system in synchronized mode increase the
system’s capacity and transfer rate in a cost-effective manner.
The interface consists of a twisted-pair cable, which connects the drives
in the synchronized system in a daisy-chain configuration as shown in
Figure 4.
Figure 4. Synchronized drive interconnect diagram
The host can reconfigure the drive a ny time after power-up to be the
master or a slave by using the Mode Select command on the Rigid Disc
Drive Geometry page. The master provides the reference signal to which
all other drives phase-lock, including the master. There is only one master
per system, and that can be a drive or the host computer. All drives may
be configured as slaves allowing the host to provide the reference signal.
Each drive also can be configured for the non-synchronized mode in which
it ignores any reference signal that might be present—this is the default
mode as shipped from the factory. Connect the synchronized reference
signal to the host only if the host provides the reference signal. If the host
does not provide the reference signal, do not connect the host.
Page 27

Elite 9 Product Manual, Rev. C 17
T
1.0 microsecond min.
1.37 microseconds max.
0
1
SSREF +
Rotational position locking
Note. Mode Select page 04h, byte 17, bits 0 and 1.
RPL Description
00b Spindle synchronization is disabled (default value)
01b The target operates as a synchronized-spindle slave
10b The target operates as a synchronized-spindle master
11b The target operates as a synchronized-spindle master control
(not supported by the disc drive)
The VIC 2 LSI on the master drive provides the reference signal (SSREF+).
The index signal gener ates a 90 Hz s ignal. The signal is normally
false/negated (nominal 0V) and makes a transition to the true/asserted
(nominal +5V) level to indicate the reference position during the revolution
period. Master and slave drives use the trailing (falling) edge of the
reference signal to phase-lock their spindles. A maximum of 10 seconds
is allowed for a slave to synchronize with the reference signal. Figure 5
shows the characteristics of the reference signal.
T = 0.0083 seconds (± 1.0% max)
± 10 microseconds cycle-to-cycle variance
± 20 microseconds phase error while synchronized
Figure 5. Synchronized reference signal characteristics
Page 28

18 Elite 9 Product Manual, Rev. C
SCSI interface factors
The Rotational Position Locking (RPL) field in byte 17 (bits 0 and 1) of the
Rigid Disc Drive Geometry mode parameters page (page 04h) is used for
enabling and disabling spindle synchronization mode (see the
Interface Product Manual
attention condition to all initiators. The sense key is set to Unit Attention and
the additional sense code is set to RPL Status Change.
After reaching synchronization, if the target detects a change of synchronization and:
1. If the logical unit is not executing an I/O process for the initiator, then the
target creates a unit attention condition. The sense key is set to Unit
Attention and the additional sense code is set to RPL Status Change.
2. If the logical unit is executing an I/O process and no other error occurs,
then the target returns Check Condition status. The sense key is set to
Recovered Error if the target is able to complete the I/O process or to
Hardware Error if the target is unable to complete the I/O process. The
additional sense code is set to RPL Status Change.
You may operate the drive with a rotational skew when synchronized. The
rotational skew is applied in the retarded direction (lagging the synchronizedspindle master control). A rotational offset of up to 255/256 of a revolution
lagging may be selected. Select the amount of offset by using the Mode
Select command, Rigid Disc Drive Geometry page (page 04h), byte 18 (see
the
SCSI-2 Interface Product Manual
numerator of a fractional multiplier that has 256 as the denominator. For
example, 40h selects 40h/FFh or 1/4 of a revolution lagging skew, 80h
selects 1/2 of a revolution lagging skew, etc. Since the drive supports all
offset values from 0 to 255, values sent by the initiator are not rounded off.
The drive’s translation of the digital offset values to physical rotational offsets
results in offset values whose phase error lies within the ± 20 microseconds
phase error with respect to the supplied 90 Hz reference signal.
). If the target fails to synchronize, it creates a unit
). The value in byte 18 (0–FFh) is the
SCSI-2
The drive does not have the capability to adjust the rotational offset value
requested by the initiator to a physical offset in the drive that corresponds in
any way to sector boundaries or changes in ZBR zones. The initiator must
formulate these boundaries or changes, if required, to calculate the value of
offset it sends to the drive.
Page 29

Elite 9 Product Manual, Rev. C 19
6.0 Reliability specifications
The following reliability specifications assume correct host and drive
interface, including all interface timings, power supply voltages, and
environmental requirements.
Seek error rate Less than 10 errors in 108 seeks
Recoverable error rate Less than 10 errors in 1011 bits transferred
(using default settings)
Unrecovered data Less than 1 sector in 1014 bits transferred
Miscorrected data Less than 1 sector in 1021 bits transferred
MTBF 500,000 hours
Service life 5 years
Preventive maintenance None required
6.1 Error rates
The error rates stated in this manual assume the following:
• The drive is operated using DC power as defined in Section 7.2.
• The drive has been formatted with SCSI format commands.
• Errors caused by media defects or host system failures are excluded from
error rate computations. Refer to Section 9.0.
6.1.1 Environmental interference
When evaluating system operation under conditions of electromagnetic
interference (EMI), the performance of the drive within the system is
considered acceptable if the drive does not generate an unrecoverable
condition.
An unrecoverable error or condition is defined as one that:
• is not detected and corrected by the drive itself;
• is not capable of being detected from the error or fault status provided
through the drive or SCSI interface; or
• is not capable of being recovered by normal drive or system recovery
procedures without operator intervention.
6.1.2 Write errors
Write errors can occur as a result of media defects, environmental interference, or component malfunction. Therefore, write errors are not predictable
as a function of the number of bits passed.
If an unrecoverable write error occurs because of a component malfunction
in the drive, the error is classified as a failure affecting MTBF. Unrecoverable
write errors are those that cannot be corrected within two attempts at writing
the record with a read verify after each attempt (excluding media defects).
Page 30
20 Elite 9 Product Manual, Rev. C
6.1.3 Seek errors
A seek error is defined as a failure of the drive to position the heads at the
addressed track. There must be no more than one recoverable seek error in
107 physical seek operations. After detecting an initial seek error, the drive
automatically reseeks to the addressed track up to three times. If a reseek
is successful, the extended sense report indicates a seek-positioning error
(15h), No-Seek-Complete Error (02h), or Track-Follow Error (09h), and the
sense key reports a Recovered Error (1h). If all three reseeks fail, a SeekPositioning Error (15h) is reported with a Medium (3h) or Hardware Error (4h)
reported in the sense key. This is an unrecoverable seek error. Unrecoverable seek errors are classified as failures for MTBF calculations. Refer to
Section 5.1.1.2 of the
77738479).
SCSI-2 Interface Product Manual
(part number
6.2 Reliability and service
You can enhance the reliability of Elite 9 disc drives by ensuring that the drive
receives adequate cooling. This section provides recommended air-flow
information, temperature measurements, and other information that may be
used to enhance the service life of the drive.
6.2.1 Mean time between failures (MTBF)
The production disc drive achieves an MTBF of 500,000 hours when
operated in an average local disc drive ambient temperature of 95°F (35°C)
or less. Short-term excursions up to the specification limits (122°F, 45°C) of
the operating environment will not affect MTBF performance.
The following expression defines MTBF:
MTBF =
Estimated power-on operating hours means the estimated total power-on
hours for all drives in service.
Drive failure means any stoppage or substandard performance caused by
drive malfunction.
Data is calculated on a rolling-average base for a minimum period of six
months.
6.2.2 Air flow
The rack, cabinet, or drawer environment for the Elite 9 drive must provide
cooling of the electronics and head and disc assembly (HDA). You should
confirm that adequate cooling is provided using the temperature measurement guidelines described below.
Orient the drive or direct air flow s o that the least amount of air-flow
resistance is created while providing air flow to the electronics and HDA.
Also, choose the shortest possible path between the air inlet and exit to
minimize the travel length of air heated by the Elite 9 drive and other heat
sources within the rack, cabinet, or drawer environment.
Possible air-flow patterns are shown in Figure 6. Create the air-flow patterns
by using one or more fans, either forcing or drawing air as shown in the
illustrations. Other air-flow patterns are acceptable as long as the temperature measurement guidelines are met.
Estimated power-on operating hours in the period
Number of drive failures in the period
Page 31

Elite 9 Product Manual, Rev. C 21
Note. Air flows in the direction shown (front to back)
or in reverse direction (back to front)
Above unit
Under unit
Note. Air flows in the direction shown or
in reverse direction (side to side)
Above unit
Under unit
Figure 6. Air-flow patterns
Page 32

22 Elite 9 Product Manual, Rev. C
J06
U1
U5
J15
U12 U33
J17
U10 U13
J12
U58
U4
U20
U35
U34
U28
U56
J30
J23
U28U23
U14
U2U3
J18
J4B
J4A
To confirm that required cooling for the Elite electronics and HDA is provided,
place the drive in its final mechanical configuration, perform random write/
read operations; and after the temperatures stabilize, measure the case
temperature of the components listed below.
Maximum allowable operating temperatures are listed in the last column.
Operation above these values may adversely affect the drive’s ability to
meet functional specifications.
Air-flow cooling
MTBF
500k hours
Card Component Reference case temperature (°C)
R/T/U/CYHX Transmitter U5 45
R/T/U/CYHX Writer U35 46
R/T/U/CYHX VIC2 U20 44
R/T/U/CYHX VOLT MON U56 43
R/T/U/CYHX DRAM U3 41
The air-flow pattern with which the temperature guidelines above were
generated is shown in Figure 6. Local average air velocity was 200 lfpm and
inlet air temperature to the drive was 30°C (86°F).
The maximum allowable HDA case temperature is 55°C.
Figure 7. R/T/U/CYHX temperature measurement locations
Page 33

Elite 9 Product Manual, Rev. C 23
6.2.3 Preventive maintenance
No preventive maintenance is required.
6.2.4 Service life
The drive has a useful service life of 5 years. Depot repair or replacement of
major parts is permitted during this period.
6.2.5 Service philosophy
Special equipment is required to repair the drive’s HDA. To achieve the
5-year service life, repairs must be performed only at a properly equipped
and staffed service and repair facility. Troubleshooting and repair of PCBs
in the field is not recommended because of the extensive diagnostic
equipment required for effective servicing. Also, there are no spare parts
available for this drive. The drive’s warranty is voided if the HDA is opened.
6.2.6 Installation
The drive is designed, manufactured, and tested with a “plug in and play”
installation philosophy. This philosophy minimizes the requirements for
highly trained personnel to integrate the drive into the OEM’s system,
whether in a factory or field environment. Refer to Section 4.4 and to the
Elite 9 Installation Guide
(83328850) for installation instructions.
The drive has been low-level formatted at the factory and does not need to
be reformatted.
6.2.7 Service tools
No special tools are required for site installation or recommended for site
maintenance. Refer to Section 6.2.3. The depot repair philosophy of the drive
precludes the necessity for special tools. Field repair of the drive is not
practical because users cannot purchase individual parts for the drive.
Page 34

24 Elite 9 Product Manual, Rev. C
Page 35

Elite 9 Product Manual, Rev. C 25
7.0 Physical and electrical specifications
This sectio n provides information relating to the physical and electrical
characteristics of Elite 9 drives.
7.1 AC power requirements
None.
7.2 DC power requirements
The voltage and current requirements for a single drive are shown in
Tables 1 and 2 (table notes follow Table 2). Values indicated apply at the
drive’s power connector.
Table 1. DC power requirements for ST410800N/ND drives
Single ended Differential
[8]
Voltage regulation
Max operating current DC 3σ [1] 0.95 1.85 1.4 1.85
Avg idle current DC X [1] [12] 0.665 1.57 0.71 1.57
Max start current
(peak) DC 3σ [3] [6] 0.98 4.8 1.0 4.8
(peak) AC 3σ [3] – 5.12 – 5.12
Delay motor start (max) DC 3σ [1] [4] 0.98 0.25 1.0 0.25
Peak operating current
Typical DC X [1] [10] 0.93 1.69 1.32 1.69
Maximum DC 3σ [1] 0.95 1.85 1.4 1.85
Maximum (peak) AC 3σ 1.19 2.89 1.58 2.89
Track following at
OD DC X [1] 0.94 1.6 0.99 1.6
ID DC X [1] 0.92 1.9 0.98 1.9
Read track
OD DC 3σ [1] [14] 0.96 1.8 1.45 1.8
AC 3σ 1.37 1.9 1.64 1.9
Seeking
Typical DC X [1] [13] 0.95 1.95 0.99 1.95
Maximum DC 3σ [1] 0.99 2.1 1.02 2.1
Maximum (peak) AC 3σ 1.15 2.85 1.49 2.85
[5]
Notes
5V
±±
±5%
±±
12V 5V
[2]
±±
±5%
±±
Amps
±±
±5%
±±
[8]
12V
±±
±5%
±±
[2]
Page 36

26 Elite 9 Product Manual, Rev. C
Table 2. DC power requirements for ST410800W/WD drives
Single ended Differential
Voltage regulation
[5]
Notes
5V
±±
±5%
±±
[11]
12V 5V
±±
±5%
±±
[2]
±±
±5%
±±
[11]
12V
±±
±5%
±±
[2]
Amps
Max operating current DC 3σ [1] 1.0 1.94 1.27 1.94
Avg idle current DC X [1] [12] 0.7 1.56 1.0 1.56
Max start current
(peak) DC 3σ [3] [6] 1.0 4.8 1.1 4.8
(peak) AC 3σ [3] – 5.12 – 5.12
Delay motor start (max) DC 3σ [1] [4] 0.96 0.25 1.1 0.25
Peak operating current
Typical DC X [1] [15] 0.98 1.69 1.18 1.69
Maximum DC 3σ [1] 1.0 1.94 1.27 1.94
Maximum (peak) AC 3σ 1.1 2.89 1.93 2.89
Track following at
OD DC X [1] 0.97 1.58 1.0 1.56
ID DC X [1] 0.96 1.9 0.99 1.9
Read track
OD DC 3σ [1] [16] 1.03 1.8 1.5 1.8
AC 3σ 1.1 2.1 2.1 2.1
Seeking
Typical DC X [1] [13] 0.96 1.95 1.0 1.95
Maximum DC 3σ [1] 1.0 2.2 1.1 2.2
Maximum (peak) AC 3σ 1.1 2.85 1.7 2.85
Notes:
[1] Measured with an average reading DC ammeter. Instantaneous +12V
current peaks will exceed these values.
[2] A −10% tolerance is permissible d uring initial start of the spindle and
must return to ±5% before reaching 5,400 RPM. The ±5% must be
maintained after the drive signals that its power-up sequence has been
completed and that it can accept selection by the host initiator.
[3] See Figure 8.
[4] This condition occurs when the Motor Start Option is enabled and the
drive has not yet received a start motor command.
[5] See Section 7 .2.1 “Conducted noise immunity.” Specified voltage toler-
ance includes ripple, noise, and transient response.
[6] At power-up, the motor current regulator limits the 12V current to an
average value of less than 4.8A, although instantaneous peaks may
exceed this value. These peaks should measure 5 msec duration or
less.
[7] Minimum current loading for each supply voltage is not less than 7% of
the maximum operating current shown.
[8] Use separate ground returns for +5V and +12V supplies.
[9] Where power is provided to multiple drives from a common supply,
carefully consider individual drive power requirements. Where multiple
units are powered on simultaneously, be sure the peak starting current
is available to each device.
continued
Page 37

Elite 9 Product Manual, Rev. C 27
continued from previous page
[10] Operating condition is defined as a third-stroke seek at OD and read
one track. A command is issued every 100 msec.
[11] No terminator power. See Section 11.7.3.4.
[12] All power-saving features enabled.
[13] Seeking is defined as a third-stroke seek at OD. A command is issued
every 23 msec.
[14] Read track is defined as repeat reads of track 15 with an 88% duty cycle.
[15] Operating condition is defined as a third-stroke seek at OD and read
one track. A command is issued every 60 msec for ST410800W drives
and every 72 msec for ST410800WD drives.
[16] Read track is defined as repeat reads of track 15 with a 45% duty cycle
at 00.
7.2.1 Conducted noise immunity
Noise is specified as a periodic and random distribution of frequencies
covering a band from DC to 10 MHz. Maximum-allowed noise values given
below are peak-to-peak measurements and apply at the drive’s power
connector.
With spindle With spindle
motor not running motor running
++
+5V
++
100mV 100mV 330mV
++
+12V
++
7.2.2 Power sequencing
The drive does not require power sequencing. The drive protects against
inadvertent writing during power-up and down. Daisy-chain operation requires that power be maintained on the terminated device to ensure proper
termination of the peripheral I/O cables.
The Start Command option and Spinup Delay option jumpers determine
when the drive will spin up. The following three options are available:
• Spin up when the Start Unit command is received
• Spin up immediately when power is applied
• Delay spin-up based on the target ID (SCSI ID)
To automatically delay motor start based on the target ID (SCSI ID), attach
a jumper connecting pins 1 and 2 on the J4B connector. See Section 10.1 for
additional information about this option.
++
+12V
++
Page 38

28 Elite 9 Product Manual, Rev. C
+12V Current (amps)
Time (seconds)
0 5 10 15 20 25 30
t2
t0 t1 t3 t4
t5
t6
0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
4.8
4.4
3.4
Peak AC
Minimum AC
Nominal Curve (average)
7.2.3
++
+12V current profile
++
Figure 8 identifies the drive’s +12V current profile. The current during the
various times is as shown.
7.3 Heat/power dissipation
Figure 8. Elite 9 drive typical
T0 Power is applied to the drive.
T1 Controller self-tests are performed.
T2 The spindle begins to accelerate under current limiting after performing
T3 The spindle is up to speed and the head-arm restraint is unlocked.
T4 Heads move from the landing zone to the data area.
T5 The adaptive calibration sequence is performed.
T6 Calibration is complete and the drive is ready for reading and writing.
Note. All times and currents are typical. See Table 1 for maximum current
The heat and DC power dissipation values for your drive are listed below.
Typical seek and read 25W 26W 26W
avg at nominal voltages (85 BTUs/hr) (89 BTUs/hr) (89 BTUs/hr)
Typical under idle 22W 22W 23W
conditions (75 BTUs/hr) (75 BTUs/hr) (78 BTUs/hr)
internal diagnostics.
requirements.
++
+12V current profile
++
ST410800N/W ST410800ND ST410800WD
Page 39

Elite 9 Product Manual, Rev. C 29
7.4 Environmental limits
Temperature and humidity must not cause condensation within the drive.
Altitude and atmospheric pressure specifications are referenced to a standard day at 58.7°F (14.8°C). Maximum wet bulb temperature is 79°F (26°C).
7.4.1 Temperature
a. Operating
The MTBF specification for the drive is based on operating at a local
ambient temperature of 95°F (35°C). Occasional excursions to drive
ambient temperatures of 113°F (45°C) may occur without impact to the
specified MTBF. The enclosure for the drive should be designed such that
the temperatures at the locations specified in Section 6.2.2 are not
exceeded. Air flow may be needed to achieve these temperatures.
Continual or sustained operation at case temperatures above these
values may degrade MTBF.
The drive meets all specifications within a 50° to 113°F (10° to 45°C)
drive ambient temperature range with a maximum gradient of 36°F
(20°C) per hour.
b. Non-operating
Non-operating temperature should remain between –40° to 140°F (–40°
to 60°C) package ambient with a maximum gradient of 36°F (20°C)
per hour. This assumes that the drive is packaged in the shipping
container designed by Seagate.
7.4.2 Relative humidity
The values below assume that no condensation on the drive occurs.
a. Operating
5% to 95% relative humidity with a maximum gradient of 10% per hour
b. Non-operating
5% to 95% relative humidity
7.4.3 Effective altitude (sea level)
a. Operating
–1,000 to +6,000 feet (–305 to +1,829 meters)
b. Non-operating
–1,000 to +40,000 feet (–305 to +12,210 meters)
7.4.4 Shock and vibration
Shock and vibration limits are measured directly on the drive’s chassis.
Ensure that you use an enclosure that buffers a nd restricts the drive’s
movements to meet the shock and vibration requirements listed below.
The limits of shock and vibration defined within this manual are specified
with the drive mounted in one of the two methods shown in Figure 10.
Page 40

30 Elite 9 Product Manual, Rev. C
7.4.4.1 Shock
a. Operating in a normal environment
The drive as installed for normal operation operates error free while
subjected to intermittent shock not exceeding:
2.0 Gs at a maximum duration of 10 msec (half-sinewave)
Shock may be applied in the X, Y, or Z axis.
b. Operating in an abnormal environment
The drive as installed for normal operation does not incur physical
damage while subjected to intermittent shock not exceeding:
10 Gs at a maximum duration of 10 msec (half-sinewave)
Shock occurring at abnormal levels may degrade operating performance
during the abnormal shock period. Specified operating performance
continues when normal operating shock levels resume.
Shock may be applied in the X, Y, or Z axis. Shock must not be repeated
more than two times per second.
c. Non-operating
The limits of non-operating shock shall apply to all conditions of handling
and transportation. This includes both isolated drives and integrated
drives.
The drive subjected to non-repetitive shock not exceeding 28 Gs at a
maximum duration of 10 msecs (half-sinewave) shall not exhibit device
damage or performance degradation. Shock may be applied in the X, Y,
or Z axis.
d. Packaged
The drive as packaged by Seagate for general freight shipment withstands a drop test against a concrete floor or equivalent with specifications not exceeding:
Drop test applies to a single- or multiple-drive pack.
7.4.4.2 Vibration
a. Operating in a normal environment
The drive as installed for normal operation operates error free while
subjected to continuous vibration not exceeding:
20 pounds (8.95 kg) for pack’s gross weight
42 inches (1,070 mm) for distance dropped
5-500 Hz @ 0.5 G
Vibration may be applied in the X, Y, or Z axis.
Page 41

Elite 9 Product Manual, Rev. C 31
b. Operating in an abnormal environment
Equipment as installed for normal operation does not incur physical
damage while subjected to periodic vibration not exceeding:
15 minutes of duration at major resonant frequency
5-500 Hz @ 0.75 G
Vibration occurring at these levels may degrade operating performance
during the abnormal vibration period. Specified operating performance
continues when normal operating vibration levels are resumed—this
assumes system recovery routines are available.
Abnormal vibration may be applied in the X, Y or Z axis.
c. Non-operating
The limits of non-operating vibration apply to all conditions of handling
and transportation. This includes both isolated drives and integrated
drives.
The drive does not incur physical damage or degraded performance as
a result of continuous vibration not exceeding:
5-500 Hz @ 1.00 G
Vibration may be applied in the X, Y, or Z axis.
7.4.5 Air cleanliness
The drive is designed to operate in a typical office environment with minimal
environmental control.
7.4.6 Acoustics
Sound power during idle mode (when the drive is not seeking, reading, or
writing) is 4.96 bels typical when measured to ISO 7779 specifications.
7.5 Electromagnetic compatibility
As a component part, the drive is not required to meet any susceptibility
performance requirements. The system integrator is responsible for performing tests to ensure that equipment operating in the same system as the
drive does not adversely affect the performance of the drive. See Tables 1
and 2 and Section 7.2 “DC power requirements.” An engineering characterization to IEC801 immunity requirements is available from the Seagate
Safety department.
Page 42

32 Elite 9 Product Manual, Rev. C
K
M4 x .70 Metric Threads (4)
B
C
D
E
F
J
C.G.
L
6-32 Threads (4)
C.G.
I
I
G
H
A
Side
A
B
C
D
E
F
G
H
I
J
K
L
3.25
0.86
0.39
1.93
3.120
8.06
5.50
5.75
0.12
3.90
1.55
3.15
0.01
0.01
0.01
0.01
0.005
0.01
0.01
0.01
0.05
0.05
0.05
±
±
±
±
±
max
±
±
±
±
±
±
82.55
21.84
9.91
49.02
79.24
204.72
139.70
146.05
3.05
99.06
39.37
80.01
in
mm
Bottom
6-32 Threads (4)
1
The maximum screw depth that
extends into chassis must not
exceed 0.14 inches. Screws must
not touch the module or interfere
with the sway space.
1
1 1
7.6 Mechanical specifications
The following nominal dimensions do not include the decorative front-panel
accessory. Refer to Figure 9 for detailed mounting configuration dimensions.
Height 3.25 in 82.6 mm
Width 5.75 in 146.1 mm
Depth 8.00 in 203 mm
Weight 7.9 lb 3.6 kilograms
Figure 9. Elite 9 drive typical mounting configuration dimensions
Page 43

Elite 9 Product Manual, Rev. C 33
6-32
Bottom-Mounting
Screws (4)
DC Power
Connector
J15
Pin 1
DC Power
Cable
M4 x .70
(metric)
M4 x .70
(metric)
6-32
Screw
6-32
Screw
Side-Mounting
Screws (2 on
each side)
Note:
Either side- or bottom-mounting screws
can be used with each drive orientation
1
1
1
2
2
Up
Up
1
2 3
4
Drive
Pin
Power
1
2
3
4
+12 VDC
+12 Volts return
+5 Volts return
+5 VDC
DC power and pin
connector assignments
7, 8
6, 9
3, 4
1, 2
Power Supply
(9 pin)
Pin Number
7.6.1 Drive orientation
Elite drives are designed to be mounted on their bases (horizontally) or on
either side as shown in Figure 10. All drive performance evaluations have
been done with the drive in horizontal (discs level) and vertical (drive on its
side) orientations, which are the two preferred mounting orientations.
Figure 10. Elite 9 drive recommended mounting
7.6.2 Cooling
Ensure that the enclosure you use provides adequate cooling so that the
ambient temperature immediately surrounding the drive does not exceed
temperature conditions specified in Section 7 .4.1. Ensure that you provide
adequate air circulation around the printed circuit boards (PCBs) to meet
the requirements of Section 6.2.2.
Page 44

34 Elite 9 Product Manual, Rev. C
Page 45

Elite 9 Product Manual, Rev. C 35
8.0 Media characteristics
This section provides information regarding the media used in Elite 9 disc
drives.
8.1 Media description
The media used on the drive has a diameter of approximately 131.25 mm
(5.25 inches). The aluminum substrate is coated with a thin-film magnetic
material, which has a proprietary protective layer for improved durability and
environmental protection.
Page 46

36 Elite 9 Product Manual, Rev. C
Page 47

Elite 9 Product Manual, Rev. C 37
9.0 Defect and error management
The drive, as delivered, complies with this product manual. The read error
rates and specified storage capacities are not dependent on using defectmanagement routines by the host (initiator).
Defect and error management in the SCSI system involves the drive’s
internal defect/error management and SCSI system error considerations
(errors in communications between the initiator and the drive). Tools for
designing a defect/error management plan are briefly outlined in this section.
References to other sections are provided when necessary.
9.1 Defects and errors
Identified defects are recorded on the drive’s defects list (referred to as the
primary or ETF defect list). These known defects are reallocated during the
initial drive format at the factory. (See Format Unit command Section 5.2.1.2
in the
SCSI-2 Interface Product Manual,
correction by ECC recovers data from additional flaws if they occur.
Details of the SCSI commands supported by the drive are described in the
SCSI-2 Interface Product Manual.
Error Recovery philosophy is presented in Section 6 of the
Product Manual.
Also, more information about the drive’s
part number 77738479.) Data
SCSI-2 Interface
Page 48

38 Elite 9 Product Manual, Rev. C
Page 49

Elite 9 Product Manual, Rev. C 39
DC Power
Connector
J4A
I/O
Connector
(non-wide shown)
J4B
J01 (N models)
J01 (ND/W/WD models)
10.0 Option headers
This section describes how to configure Elite 9 drives using t he option
headers on the drives. These option headers may be used to customize the
drive for use in your particular system.
10.1 ST410800 option headers
Figure 11. ST410800 option header locations
Page 50

40 Elite 9 Product Manual, Rev. C
SCSI ID = 0
SCSI ID = 1
SCSI ID = 2
SCSI ID = 3
SCSI ID = 4
SCSI ID = 5
SCSI ID = 6
SCSI ID = 7
Write Protect
Reserved
Terminator Enable
Spindle Sync Cable Connector
Internal terminator power source
External terminator power source
Internal terminator power to I/O
J4A
J01
SSREF
4
SCSI ID = 8*
SCSI ID = 9*
SCSI ID = Ah (10)*
SCSI ID = Bh (11)*
SCSI ID = Ch (12)*
SCSI ID = Dh (13)*
SCSI ID = Eh (14)*
SCSI ID = Fh (15)*
*Applicable only for W- and WD-type drives.
DC Power
Connector
J4A
SCSI I/O
Connector
J4B
J01
231
Terminator Power Option
Spinup delay equal to the SCSI
bus ID multiplied by 10 seconds
(if the Start Command jumper
is disconnected).
J4B
Spinup Delay Option
Pin 1
Immediate spinup (if the
Start Command Option jumper
is disconnected).
Start spindle after the SCSI bus
sends a Start Unit command.
Start Command Option
Start spindle according to
the Spinup Delay Option jumper.
Ignore parity check.
SCSI Bus Parity Check
Check the parity of data bytes
read from the SCSI bus.
Reserved.
Pin 4
Pin 3
Pin 1
Pin 2
Pin 1
Active LED connector.
Ready LED connector
Fault LED connector.
Ground
LED Connections
Connect the anode to the desired
LED connector and the cathode
to the ground pin.
Note Pin 1 location
Anode (positive)
Anode (positive)
Anode (positive)
Pin 23
Figure 12 illustrates ST410800 option select jumper connectors.
Figure 12. Option select jumper connectors
Page 51

Elite 9 Product Manual, Rev. C 41
Block Pins Function
J01 1 & 2 Terminator power supplied from the drive
2 & 4 Terminator power supplied from the SCSI bus
1 & 3 and Terminator power supplied to the SCSI bus and drive
2 & 4
J4A 1 to 8 SCSI ID. See Figure 12.
9&10 Write Protect option. Jumper installed protects the entire
disc drive. Default is no jumper.
11&12 Reserved
13&14 Pins not installed.
15&16 Active remote LED connector. Pin 15 is cathode (neg).
Pin 16 is anode (pos).
15&17 Fault remote LED connector. Pin 15 is cathode (neg). Pin
17 is anode (pos).
15&18 Ready remote LED connector. Pin 15 is cathode (neg).
Pin 18 is anode (pos).
19&20 Terminator enable. Jumper installed connects the inter-
nal terminator to the I/O lines. Default is jumper installed.
This jumper applies only to “N” and “W” models only. “ND”
and “WD” models can be terminated as described in
Section 11.7.3.3.
21&22 Pins not installed.
23&24 Spindle sync cable connector. Pin 24 is the SSREF+ or
reference index signal. Pin 23 is Gnd.
J4B 1&2 Spinup Delay option. This jumper is used only if the Start
Command option jumper i s not i nstalled. Jumper not
installed causes the spindle to turn as soon as power is
applied to the drive. Jumper installed causes the spindle
to turn after a delay equal to 10 seconds times the SCSI
ID. Example:
A SCSI ID is equal to three (3)
3 × 10 = 30
Target spindle motor starts after 30 seconds
Default is no jumper.
3&4 Start Command option. Jumper not installed causes the
spindle to start according to the Spinup Delay option
jumper. Jumper installed causes the spindle to start
spinning only when a Start Unit command is received
from the SCSI bus. Default is no jumper.
5&6 SCSI bus parity check. Jumper not installed causes the
drive to check the parity of data bytes read from the SCSI
bus. Jumper installed causes the drive to ignore parity.
Default is no jumper.
7&8 Reserved. Default is no jumper.
Page 52

42 Elite 9 Product Manual, Rev. C
Driver Receiver
2.21K Ohm
SSREF +
GND
Main PWA
J4A - 24
+5V
J4A - 23
Open
Collector
10.2 Synchronized spindles interface
The synchronized spindles interface (SSI) allows several drives operating
from the same host to operate their spindles at a synchronized rotational rate.
The system operation is described in Section 5.7.
10.2.1 Electrical description
The electrical interface consists of one digital TTL reference index signal and
ground. The reference index signal (SSREF+) is an output if the drive is
configured as a master and is an input otherwise. The reference index signal
is connected from drive to drive in a daisy-chain fashion as shown in Figure 4.
10.2.1.1 Drivers and receivers
Figure 13 shows a diagram of the driver/receiver circuit. The driver circuits
have the following electrical specifications:
Negated (false): 0.V to +0.4V @ I = –24 mA (max)
Asserted (true): +2.24V to +5.25V @ I = +250 µA
Figure 13. SCSI reference index signal driver/receiver combination
Page 53

Elite 9 Product Manual, Rev. C 43
.945
(24 mm)
.079 (2 mm)
.079
(2 mm)
.866
(22 mm)
J4A
10.2.1.2 Termination
The reference index signal (SSREF+) is terminated with a 2.21K ohm
resistor. Each drive has a spindle sync terminator resistor located on the
main PCB. The spindle sync terminator resistor is not removable and is
always in the circuit. A diode prevents current from backfeeding.
10.2.1.3 Physical interface
The dimensions of the J4A connector mounted on the main PCB to
interconnect the drives are shown in Figure 14. It is a 24-pin, 12-jumper
position gold header type connector; however, pins 13, 14, 21, and 22 are not
installed. Only pins 23 and 24 are used for connecting the reference index
signal cable, as shown in Figure 12. Pin 23 is ground, and pin 24 is SSREF+.
Figure 14. ST410800 configuration select header specification
10.3 Grounding
Signal ground (PCB) and HDA ground are connected together in the Elite 9
family drives—do not separate this connection. Maximizing the conductive
contact area between HDA ground and system ground may reduce radiated
emissions. If you do not want the system chassis to be connected to the HDA/
PCB ground, you must provide a nonconductive (electrically isolating)
method of mounting the drive in the host equipment; however, this may
increase radiated emissions and is the system designer’s responsibility.
Page 54

44 Elite 9 Product Manual, Rev. C
Page 55

Elite 9 Product Manual, Rev. C 45
11.0 Interface requirements
This section describes the Elite 9 interface requirements.
11.1 General description
The major portion of the interface requirements/implementation is described in the
This section has tables that give the Elite 9 family drives’ version of the SCSI
implementation described in the
11.2 SCSI interface messages supported
Table 3 lists the messages supported by the Elite 9 SCSI-1 and SCSI-2
modes.
Table 3. SCSI messages supported
Message name code SCSI-1 SCSI-2
Abort 06h Y Y
Abort tag 0Dh Y Y
Bus device reset 0Ch Y Y
Clear queue 0Eh N Y
Command complete 00h Y Y
Continue I/O Process 12h N N
SCSI-2 Interface Product Manual
SCSI-2 Interface Product Manual
Msg Supported by:
(part number 77738479).
.
Disconnect 04h Y Y
Extended messages 01h*** Y Y
Identify 80h-FFh Y Y
Ignore wide residue (two bytes) 23h N N
Initiate recovery 0Fh N N
Initiator detected error 05h Y Y
Linked command complete 0Ah Y Y
Linked command complete with flag 0Bh Y Y
Message parity error 09h Y Y
Message reject 07h Y Y
Modify data pointer *** N Y
No operation 08h Y Y
Queue tag messages (two bytes)
Head of queue tag 21h N Y
Ordered queue tag 22h N Y
Simple queue tag 20h N Y
Release recovery 10h N N
Restore pointers 03h Y Y
Save data pointer 02h Y Y
Synchronous data transfer request *** Y Y
Target transfer disable 13h N N
Terminate I/O process 11h N N
Wide data transfer request *** N Y
*** Extended messages (see the
SCSI-2 Interface Product Manual)
Page 56

46 Elite 9 Product Manual, Rev. C
11.3 SCSI interface commands supported
Table 4 lists the SCSI interface commands supported in SCSI-1 and
SCSI-2 modes. Elite 9 family drives can be changed back and forth
between SCS I-1 and SCSI-2 modes using t he Chan ge Definition command. Standard OEM drives are shipped set to operate in SCSI-2 mode.
Table 4. Supported commands
Command Supported by
Command name code SCSI-1 SCSI-2
Change Definition 40h Y Y
Compare 39h N N
Copy 18h N N
Copy and Verify 3Ah N N
Format Unit [1] 04h Y Y
Inquiry 12h Y Y
Date Code Page N Y
Firmware Numbers Page N Y
Implemented Operating Def. Page N Y
Jumper Settings Page N Y
Unit Serial Number Page N Y
Vital Product Data Page N Y
Lock-Unlock-Cache 36h N N
Log Select 4Ch Y Y
Log Sense 4Dh Y Y
Mode Select 15h Y Y
Same pages as Mode Sense command
Mode Select (10) 55h N Y
Mode Sense 1Ah Y Y
Mode Sense (10) 5Ah N Y
Caching Parameters Page (08h) N Y
Control Mode Page (0Ah) N Y
Disconnect/Reconnect Control Page (02h) Y Y
Error Recovery Page (01h) Y Y
Format Page (03h) Y Y
Notch and Partition Page (0C) (media zones) N Y
Rigid Disc Drive Geometry Page (04h) Y Y
Unit Attention Page (00h) Y Y
Verify Error Recovery Page (07h) N Y
Not used 42-4Bh N N
Not used 4E-54 N N
Not used 58-59 N N
Not used 5B-5F N N
Not used 60-BFh N N
Not used C0-DFh N N
Not used E0-FFh N N
continued
Page 57

Elite 9 Product Manual, Rev. C 47
continued from previous page
Command Supported by
Command name code SCSI-1 SCSI-2
Prefetch 34h N N
Read 08h Y Y
Read Buffer 3Ch Y Y
Read Capacity 25h Y Y
Read Defect Data 37h Y Y
Read Extended 28h Y Y
Read Long 3Eh Y Y
Reassign Blocks 07h Y Y
Receive Diagnostic Results 1Ch Y Y
Release 17h Y Y
Supported Diagnostics Pages Y Y
Translate Page Y Y
Release 57h N Y
Request Sense 03h Y Y
Actual Retry Count Bytes N Y
Extended Sense Y Y
Field Pointer Bytes Y Y
Reserve 16h Y Y
Extent Reservation N N
Third Party Reserve Y Y
Reserve 10-byte 56h N Y
Rezero Unit 01h Y Y
Search Data Equal 31h N N
Search Data High 30h N N
Search Data Low 32h N N
Seek 0Bh Y Y
Seek Extended 2Bh Y Y
Send Diagnostics Page 1Dh Y Y
Supported Diagnostics Pages Y Y
Translate Page Y Y
Set Limits 33h N N
Start Unit/Stop Unit 1Bh Y Y
Synchronize Cache 35h N Y
Test Unit Ready 00h Y Y
Verify 2Fh Y Y
Write 0Ah Y Y
Write and Verify 2Eh Y Y
Write Buffer 3Bh Y Y
Write Extended 2Ah Y Y
Write Long 3Fh Y Y
Write Same 41h N Y
[1] Format to any even number of bytes per sector from 180 to 4,096.
Page 58

48 Elite 9 Product Manual, Rev. C
11.3.1 Inquiry data
Table 5 lists the Inquiry command data that the drive should return to the
initiator per the format provided in the
Table 5. Elite 9 family drives inquiry data
Bytes Data (hex)
0-15 00 00 ** *** 8F 00 00 1A 53 45 41 47 41 54 45 20 Vendor ID
16-31 53 54 [34 31 30 38 30 30 4E] 20 20 20 20 20 20 20 Product ID
32-47 R# R# R# R# S# S# S# S# S# S# S# S# 00 00 00 00
48-63 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
64-79 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
80-95 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
96-111 00 43 6F 70 79 72 69 67 68 74 20 28 63 29 20 31* *Copyright
112-127 39* 39* 34* 20 53 65 61 67 61 74 65 20 41 6C 6C 20 notice
128-143 72 69 67 68 74 73 20 72 65 73 65 72 76 65 64 20
144-147 D# D# D# D#
* Copyright year (changes with actual year).
** 01 = SCSI-1 implemented.
02 = SCSI-2 implemented (default).
The drive can be changed between these two configurations.
*** 01 = Response data is in SCSI-1 format and has compatibility with Common Command Set data.
02 = Response data is in SCSI-2 format (default).
The drive can be changed between these two configurations.
R# Four ASCII digits representing the last four digits of the product firmware release number.
S# Eight ASCII digits representing the eight digits of the product serial number.
D# Reserved 0000.
[ ] Bytes 18 through 24 reflect the model of the drive (hex values for ST410800N drive are
shown).
SCSI-2 Interface Product Manual.
Note. Code 20 indicates an empty-character position.
Page 59

Elite 9 Product Manual, Rev. C 49
11.3.2 Mode sense data
The following tables list the data-byte values the drive returns in response to
the Mode Sense command pages for SCSI-1 and SCSI-2 implementations
(see the
Definitions:
DEF = Default value. Standard drives are shipped configured this way.
CHG = Changeable bits; indicates if default value is changeable.
Table 6. Mode sense data, Elite 9 default values
Bytes 00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23
Mode
Sense 64 00 10 08
Data 00 FF FF FF 00 00 02 00
<—————————Mode page headers and parameter data bytes————————>
Mode
Page
SCSI-2 Interface Product Manual).
(SCSI-1 implementation)
DEF
01 81 06 04 1B 30 00 00 FF
CHG
01 81 06 EF FF 00 00 00 00
DEF
02 82 0A 80 80 00 0A 00 00 00 00 00 00
CHG
02 82 0A FF FF 00 00 00 00 00 00 00 00
DEF
03 83 16 00 1B 00 09 00 00 00 1B 00 85 02 00 00 01 00 0A 00 15 40 00 00 00
CHG
03 83 16 FF FF FF FF 00 00 FF FF 00 00 00 00 00 00 00 00 00 00 00 00 00 00
DEF
04 84 12 00 13 3E 1B 00 00 00 00 00 00 00 00 00 00 00 00 00 00
CHG
04 84 12 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 03 FF 00
DEF
08 88 12 10 00 FF FF 00 00 00 9F 02 7C 80 03 00 00 00 00 00 00
CHG
08 88 12 BD 00 00 00 FF FF FF FF 00 00 A0 FF 00 00 00 00 00 00
DEF
00 80 02 00 00
CHG
00 80 02 76 00
Page 60

50 Elite 9 Product Manual, Rev. C
Table 7. Mode sense data, Elite 9 default values
(SCSI-2 implementation)
Bytes 00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23
Mode
Sense 9F 00 10 08
Data 00 FF FF FF 00 00 02 00
<—————————Mode page headers and parameter data bytes————————>
Mode
Page
DEF
01 81 0A 04 1B 30 00 00 00 03 00 FF FF
CHG
01 81 0A EF FF 00 00 00 00 FF 00 00 00
DEF
02 82 0E 80 80 00 0A 00 00 00 00 00 00 00 00 00 00
CHG
02 82 0E FF FF 00 00 00 00 00 00 00 00 83 00 00 00
DEF
03 83 16 00 1B 00 09 00 00 00 1B 00 85 02 00 00 01 00 0A 00 15 40 00 00 00
CHG
03 83 16 FF FF FF FF 00 00 FF FF 00 00 00 00 00 00 00 00 00 00 00 00 00 00
DEF
04 84 16 00 13 3E 1B 00 00 00 00 00 00 00 00 00 00 00 00 00 00 15 18 00 00
CHG
04 84 16 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 03 FF 00 00 00 00 00
DEF
07 87 0A 00 1B 30 00 00 00 00 00 FF FF
CHG
07 87 0A 0F FF 00 00 00 00 00 00 00 00
DEF
08 88 12 10 00 FF FF 00 00 00 9F 02 7C 80 03 00 00 00 00 00 00
CHG
08 88 12 BD 00 00 00 FF FF FF FF 00 00 A0 FF 00 00 00 00 00 00
DEF
0A 8A 0A 00 10 00 00 00 00 00 00 00 00
CHG
0A 8A 0A 03 01 00 00 00 00 00 00 00 00
DEF
0C 8C 16 80 00 00 16 00 00 00 00 00 00 00 13 3D 1A 00 00 00 00 00 00 10 00
CHG
0C 8C 16 40 00 00 00 FF FF 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
DEF
00 80 02 00 00
CHG
00 80 02 76 00
Page 61

Elite 9 Product Manual, Rev. C 51
11.4 SCSI bus conditions
and miscellaneous features supported
Asynchronous SCSI bus conditions supported by the drive are listed in
Table 8. These conditions cause the SCSI device to perform certain actions
and can alter the phase sequence. Other miscellaneous operating features
supported are also listed.
Table 8. SCSI bus conditions and other miscellaneous features
Condition/feature supported by:
SCSI-1 SCSI-2 Conditions or feature
Y Y Attention condition
Y Y Reset condition
N Y Contingent allegiance condition
N N Asynchronous event notification
Y Y Arbitrating system
Y Y Disconnect/reconnect
Y Y Asynchronous data transfer
Y Y Synchronous data transfer
Y Y Synchronized (locked) spindle operation
Y Y Differential interface circuits available
Y Y Segmented caching
N N Zero latency read
N Y Queue tagging (up to 64 queue tags supported)
N Y Deferred error handling
Y Y Parameter rounding (controlled by round bit in Mode
Select page 0)
N Y Reporting actual retry count in extended sense bytes 15,
16, and 17
N N Adaptive caching
Y Y SMP = 1 in Mode Select comma nd needed to
save RPL and rotational offset bytes (in Table 5.2.1-25
of
SCSI-2 Interface Product Manual, Vol. 2)
SCSI-1 SCSI-2 Status supported
Y Y Good
Y Y Check condition
Y Y Condition met/good
Y Y Busy
Y Y Intermediate/good
Y Y Intermediate/condition met/good
Y Y Reservation conflict
Y Y Queue full
Page 62

52 Elite 9 Product Manual, Rev. C
12
3
4
11.5 Synchronous data transfer
The data transfer period to be used by the drive and the initiator is established
by an exchange of messages during the Message Phase of operation. See
the section on message protocol in the
11.5.1 Synchronous data transfer periods supported
Table 9 lists the synchronous data transfer periods supported by the drive.
Table 9. Synchronous data transfer periods
M Transfer period Transfer rate
(decimal) (M times 4 nanoseconds) (mega transfers/second)
25 100 10.0
31 125 8.0
37 150 6.66
50 200 5.00
62 250 4.00
75 300 3.33
87 350 2.85
100 400 2.50
SCSI-2 Interface Product Manual.
11.5.2 REQ/ACK offset
The maximum REQ/ACK offset supported by Elite 9 drives is 15 (0Fh).
11.6 DC cable and connector
The drive receives DC power through a 4-pin connector mounted at the rear
of the main PCB (see Figure 15.) Recommended part numbers of the mating
connector are listed below, but equivalent parts may be used.
Type of cable Connector Contacts (20-14 AWG)
14 AWG AMP 1-480424-0 AMP 60619-4 (loose piece)
Note. The output of a power supply must meet SELV (safety extra low
voltage) as defined in IEC 950.
Pins
1 +12V DC
2 +12V DC return
3 +5V DC return
4 +5V DC
AMP 61117-4 (strip)
Page 63
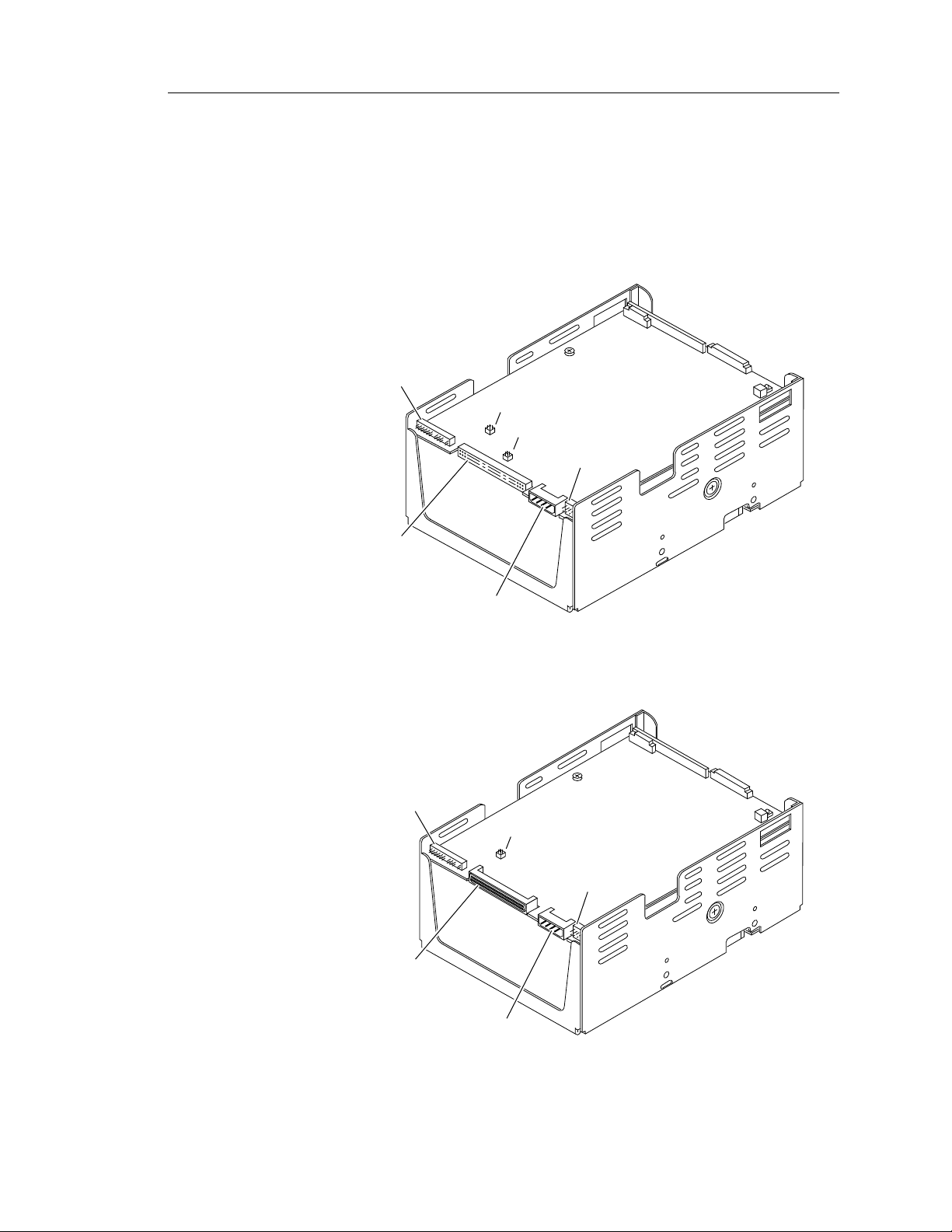
Elite 9 Product Manual, Rev. C 53
DC Power
Connector
J4A
I/O
Connector
J4B
J01 (N models)
J01 (ND models)
DC Power
Connector
J4A
I/O
Connector
J4B
J01
11.7 SCSI physical interface
Figure 15 illustrates the physical interface on Elite 9 drives. Locations of the
DC power connector, the SCSI interface connector, and the drive select and
option select headers are shown.
Details of the physical, electrical, and logical characteristics are given below.
The SCSI operational aspects of Seagate drive interfaces are provided in the
SCSI-2 Interface Product Manual.
Figure 15. ST410800N/ND physical interface
Figure 16. ST410800W/WD physical interface
Page 64

54 Elite 9 Product Manual, Rev. C
11.7.1 Physical characteristics
This section defines the connectors, cables, signals, and terminators needed
to implement the SCSI interface.
11.7.1.1 Physical description
You can daisy chain multiple SCSI devices on a common cable if each device
has the same type of driver and receiver (all single-ended or all differential).
Devices having single-ended interface circuits cannot be on the same daisy
chain with devices having a differential interface circuit. Both ends of the
cable must be terminated. All signals are common between SCSI devices.
A maximum of 8 SCSI devices (including the host) may be daisy chained
together when using a non-wide bus and ST410800N/ND drives. A maximum of 16 SCSI devices (including the host) may be daisy chained together
when using a wide bus and ST410800W/WD drives.
Terminate both ends of the daisy chain, but do not terminate any intermediate SCSI device. The ST410800N/W drives are equipped with permanently mounted IC terminators, which you can turn on or off using the
Terminator Enable jumper on pins 19 and 20 of J4A. The differential
(ST410800ND/WD) drives have removable on-board terminators.
11.7.1.2 Cable requirements
Sections 11.7.1.2.1, 11.7.1.2.2, and 11.7.1.2.3 describe the single-ended,
differential, and general cable requirements for Elite 9 drives.
11.7.1.2.1 Single-ended I/O circuits
The maximum total cable length for use with drives having single-ended I/O
driver and receiver circuits is 6 meters (19.7 feet) when operating at line data
transfer rates of 5 Mbytes/second or less, and 3 meters (9.85 feet) when
operating at transfer rates greater than 5 Mbytes/second (fast SCSI). A stub
length of no more than 0.1 meter (0.33 feet) is allowed off the mainline
interconnection with any connected equipment. An ideal impedance match
with cable terminators implies a cable characteristic impedance of 132 ohms.
Single-ended I/O cable pin assignments for ST410800N drives are shown in
Table 10. Single-ended I/O cable pin assignments for ST410800W drives are
shown in Table 12.
11.7.1.2.2 Differential I/O circuits
The maximum total cable length for use with drives having differential I/O
drivers and receiver circuits is 25 meters (82 feet). A stub length of no more
than 0.2 meter (0.66 foot) is allowed off the mainline interconnection with
any connected equipment. An ideal impedance match with cable terminators implies a cable characteristic impedance of 122 ohms. Differential I/O
cable pin assignments for ST410800ND drives are shown in Table 11.
Differential I/O cable pin assignments for ST410800WD drives are shown in
Table 13.
Page 65

Elite 9 Product Manual, Rev. C 55
11.7.1.2.3 General cable characteristics
Note. Use only non-shielded cable connectors with ST410800N/ND drives.
Use a 50-conductor flat cable or 25-conductor twisted-pair cable. Use
a minimum conductor size of 28 AWG to minimize noise effects. The
following non-shielded flat cables (or equivalents) may be used:
Flat cable 28 AWG, 3M-3365-50
Flat cable 26 AWG, 3M-3801-50
Twisted-pair flat cable 28 AWG, 3M-1700-50
(differential or single-ended)
In general, cables having the characteristic impedances given in Sections
11.7.1.2.1 and 11.7.1.2.2 are not available; however, impedances that are
lower are satisfactory. A characteristic impedance of 100 ohm +10% is
recommended for unshielded flat or twisted-pair ribbon cable. To minimize
discontinuities and signal reflections, cables of different impedances should
not be used in the same bus. Your specific setup may require tradeoffs in
shielding effectiveness, cable length, number of loads, transfer rates, and
cost to achieve satisfactory system operation. If shielded and unshielded
cables are mixed within the same SCSI bus, the effect of impedance
mismatch must be carefully considered. Proper impedance matching is
especially important to maintain adequate margin at fast SCSI transfer rates.
11.7.2 Connector requirements
Use a non-shielded 50-conductor cable connector consisting of two rows of
25 female contacts with adjacent centers 100 mils apart.
Recommended mating flat cable connector part numbers:
Closed end 3M-3425-7000 Without strain relief, no center key
(for cable ends) 3M-3425-7600 Without strain relief, with center key
3M-3425-7050 With strain relief, no center key
3M-3425-7650 With strain relief, with center key
Open end 3M-3425-6000 Without strain relief, no center key
(in daisy chain) 3M-3425-6600 Without strain relief, with center key
3M-3425-6050 With strain relief, no center key
3M-3425-6650 With strain relief, with center key
The drive device connector is a non-shielded 50-conductor connector
consisting of two rows of 25 male pins with adjacent pins 100 mils apart. The
connector is keyed (see Figure 19).
11.7.3 Electrical description
ST410800N drives use single-ended interface signals and can be configured
to provide the SCSI termination.
ST410800ND drives use differential interface signals. Differential I/O drives
are shipped with removable terminators installed on the PCB.
Page 66

56 Elite 9 Product Manual, Rev. C
Transmitter
(or transceiver)
Line Driver
Flat
Cable
Pair
[3]
[2]
[4]
[1]
+2.85V
110
Ohm
[4]
[1]
+2.85V
110
Ohm
Receiver
Line Receiver
[2]
11.7.3.1 Single-ended drivers/receivers
Typical single-ended driver and receiver circuits for the Elite 9 drives are
shown in Figure 17. The reference index signal (SSREF+) is terminated with
a 2.21K ohm resistor. Each ST410800N drive has a terminator resistor
located on the main circuit board. The terminator resistor is not removable;
however, you can disable the terminator by removing the jumper on J4A pins
19 and 20 (see Figure 12).
Transmitter characteristics
Single-ended drives use an ANSI SCSI compatible open-collector singleended driver. This driver is capable of sinking a current of 48 mA with a lowlevel output voltage of 0.4V.
Receiver characteristics
Single-ended drives use an ANSI SCSI single-ended receiver with hysteresis gate or equivalent as a line receiver.
Figure 17. Single-ended transmitters and receivers
Notes:
[1] Part of active terminator circuits. Enable drive termination when it is first
or last on the daisy chain.
Interface signal levels and logical sense at the drive I/O connector are
defined as follows:
Logic level Driver output Receiver input
Negated (0) ≥2.5V:≤5.25V ≥2.0V:<5.25V
Asserted (1) ≤0.4V:≥0.0V ≤0.8V:>0.0V
The difference in the voltages between input and output signals is due to
losses in the cable.
[2] ANSI SCSI compatible circuits.
[3] Total interface cable length should not exceed that specified in Section
11.7.1.2.1.
[4] Source of drive terminator power is VR1 which has an input source
voltage selected by a jumper.
Page 67

Elite 9 Product Manual, Rev. C 57
DE
RE
LSI
XCVR
1
1
R 2
+5V
+5V
5.6K
Transmit/Receive
Enable [1]
Transmit or
Receive
Signal [2]
[3]
[4]
11.7.3.2 Differential drivers and receivers
Typical differential driver and receiver circuits used by ST410800ND/WD
drives are shown in Figure 18.
Differential signals
All differential interface signals consist of two lines denoted +SIGNAL
and –SIGNAL. A signal is true when +SIGNAL is more positive than
–SIGNAL, and a signal is false when –SIGNAL is more positive than
+SIGNAL.
Output characteristics
Each signal driven by differential interface drives should have the following
output characteristics when measured at the disc drive’s SCSI connector:
Low-level output voltage*
= 2.0V maximum at low-level output current
= 55 milliamps
High-level output voltage*
= 3.0V minimum at high-level output current
= −55 milliamps
Differential voltage
= 1.0V minimum with common-mode voltage ranges
from −7V DC to +12V DC
* Measure these voltages between the output terminal and the SCSI
device’s logic ground reference.
The output characteristics must additionally conform to EIA RS-485-1983.
Input characteristics
Each signal received by differential interface drives should have the following
input characteristics when measured at the disc drive’s SCSI connector:
Input current on either input
= +2.0 milliamps maximum
(includes receivers and passive drivers)
This requirement is met with the input voltage varying between −7V DC and
+12V DC, with power on or off, and with the hysteresis equaling 35 mV
minimum.
The input characteristics must additionally conform to EIA RS-485-1983.
Figure 18. Typical differential I/O line transmitter/receiver and terminators
Page 68

58 Elite 9 Product Manual, Rev. C
Wide I/O
Connector
ST410800WD
I/O Terminating
Resistors
Non-wide I/O
Connector
ST410800ND
I/O Terminating
Resistors
Notes:
[1] Positive logic enables transmitter (+5V = asserted).
Negative logic enables receivers (0V = asserted).
[2] Negative logic signal (0V = asserted).
[3] Total interface cable length should not exceed 82 feet (25 meters) from
the host to the end of the daisy chain.
[4] You must provide terminators.
11.7.3.3 Terminator requirements
ST410800N/W drives. Internal disc drive I/O termination consists of active
circuits in permanently mounted IC terminator packs on the main PCB. All
single initiator/single target (non-daisy-chain) applications require you to
terminate the initiator and drive. Daisy-chain configurations require you to
terminate only the units at each end of the daisy chain. Do not terminate any
other peripheral on the chain. All terminators in the daisychain must be ANSI
SCSI-2 Standard’s alternative 2 terminators (active terminators).
Note. Remove the Terminator Enable jumper from J4A pins 19 and 20
when terminators are not required.
ST410800ND/WD drives. Differential drives are shipped with terminators
installed in sockets next to the I/O connector on the circuit board. See Figure
19. All single initiator-single target (non-daisy-chain) applications require you
to terminate the initiator and drive. Daisy-chain configurations require you to
terminate only the units at each end of the daisy chain. Do not terminate any
other peripheral on the chain.
Note. Remove the terminators from their sockets when terminators are not
required.
To terminate the drive internally, install terminating resistors (part number
15479501) in these sockets.
Figure 19. Terminating resistor locations for ND and WD drives
Page 69

Elite 9 Product Manual, Rev. C 59
.100
(2.54)
"A" ± .010
Typ.
.100
(2.54)
.025
(.64)
Sq. Contact
50 Places
C
L
No. Pos.50"A"
2.400
(60.96)
.370 ± .010
(9.398)
Pin 1
11.7.3.4 Terminator power
The drive may be configured to accept terminator power using pin 26 of the
SCSI bus, to supply power to the SCSI bus, or to provide terminator power
for optional internal termination resistors using the drive’s power connector.
The drive can provide power both to its own terminators and to the SCSI bus
terminator power line (pin 26).
SCSI devices providing terminator power (TERMPWR) must have the
following characteristics:
• V TERM = 4.50V to 5.25V
• 800 mA minimum source drive capability
• 1.0A maximum
11.8 SCSI physical interface
Section 11.8.1 discusses the ST410800N/ND (non-wide) SCSI interfaces.
Section 11.8.2 discusses the ST410800W/WD (wide) SCSI interfaces.
11.8.1 Non-wide SCSI interface
Figure 20. Non-shielded non-wide SCSI device connector
Page 70

60 Elite 9 Product Manual, Rev. C
Table 10. Single-ended cable pin assignments
(non-shielded connector) for ST410800N drives
Signal Pin number Signal Pin number
–DB (0) 2 GROUND 30
–DB (1) 4 –ATN 32
–DB (2) 6 GROUND 34
–DB (3) 8 –BSY 36
–DB (4) 10 –ACK 38
–DB (5) 12 –RST 40
–DB (6) 14 –MSG 42
–DB (7) 16 –SEL 44
–DB (P) 18 –C/D 46
GROUND 20 –REQ 48
GROUND 22 –I/O 50
GROUND 24
TERMPWR 26
GROUND 28
Notes:
1. All odd pins except pin 25 are connected to ground. Pin 25 is left open.
Caution. Do not connect pin 25 to ground at the host end or the drive end
of the cable. If you accidentally plug the I/O connector in upside
down, terminator power on pin 26 will be shorted to ground.
2. The minus sign next to a signal indicates asserted state is the low voltage
of the two levels used for logic signals.
Page 71

Elite 9 Product Manual, Rev. C 61
Table 11. Differential cable pin assignments
(non-shielded connector) for ST410800ND drives
+Signal name*Pin number–Signal name*
SHIELD GND 1 2 GROUND
DB (0) 3 4 –DB (0)
DB (1) 5 6 –DB (1)
DB (2) 7 8 –DB (2)
DB (3) 9 10 –DB (3)
DB (4) 11 12 –DB (4)
DB (5) 13 14 –DB (5)
DB (6) 15 16 –DB (6)
DB (7) 17 18 –DB (7)
DB (P) 19 20 DB (P)
DIFFSENS 21 22 GROUND
GROUND 23 24 GROUND
TERMPWR 25 26 TERMPWR
GROUND 27 28 GROUND
ATN 29 30 –ATN
GROUND 31 32 GROUND
BSY 33 34 –BSY
ACK 35 36 –ACK
RST 37 38 –RST
MSG 39 40 –MSG
SEL 41 42 –SEL
C/D 43 44 –C/D
REQ 45 46 –REQ
I/O 47 48 –I/O
GROUND 49 50 GROUND
*See Section 11.7.3.2 for detailed electrical characteristics of these
differential signals.
Page 72

62 Elite 9 Product Manual, Rev. C
2.54
(.100)
46.13
(1.816)
5.54
(.218)
12.19
(.480)
0.40
(.016)
52.32
(2.060)
11.8.2 Wide SCSI interface
Figure 21. Non-shielded wide SCSI device connector
Page 73

Elite 9 Product Manual, Rev. C 63
Table 12. Single-ended P cable pin assignments (non-shielded
connector) for ST410800W drives
+Signal name*Pin number–Signal name*
GROUND 1 35 –DB (12)
GROUND 2 36 –DB (13)
GROUND 3 37 –DB (14)
GROUND 4 38 –DB (15)
GROUND 5 39 –DB (P1)
GROUND 6 40 –DB (0)
GROUND 7 41 –DB (1)
GROUND 8 42 –DB (2)
GROUND 9 43 –DB (3)
GROUND 10 44 –DB (4)
GROUND 11 45 –DB (5)
GROUND 12 46 –DB (6)
GROUND 13 47 –DB (7)
GROUND 14 48 –DB (P)
GROUND 15 49 GROUND
GROUND 16 50 GROUND
TERMPWR 17 51 TERMPWR
TERMPWR 18 52 TERMPWR
RESERVED 19 53 RESERVED
GROUND 20 54 GROUND
GROUND 21 55 –ATN
GROUND 22 56 GROUND
GROUND 23 57 –BSY
GROUND 24 58 –ACK
GROUND 25 59 –RST
GROUND 26 60 –MSG
GROUND 27 61 –SEL
GROUND 28 62 –C/D
GROUND 29 63 –REQ
GROUND 30 64 –I/O
GROUND 31 65 –DB (8)
GROUND 32 66 –DB (9)
GROUND 33 67 –DB (10)
GROUND 34 68 –DB (11)
Notes:
1. The minus sign next to a signal name indicates asserted state is the low
voltage.
2. Eight-bit devices (non-wide) connected to the P cable must leave the
following signals open: –DB (8) –DB (9) –DB (10) –DB (11) –DB (12)
–DB (13) –DB (14) –DB (15) –DB (P1). Connect all other signals as
defined.
Page 74

64 Elite 9 Product Manual, Rev. C
Table 13. Differential P cable pin assignments
(non-shielded connector) for ST410800WD drives
+Signal name* Pin number –Signal name*
+DB (12) 1 35 –DB (12)
+DB (13) 2 36 –DB (13)
+DB (14) 3 37 –DB (14)
+DB (15) 4 38 –DB (15)
+DB (P1) 5 39 –DB (P1)
GROUND 6 40 GROUND
+DB (0) 7 41 –DB (0)
+DB (1) 8 42 –DB (1)
+DB (2) 9 43 –DB (2)
+DB (3) 10 44 –DB (3)
+DB (4) 11 45 –DB (4)
+DB (5) 12 46 –DB (5)
+DB (6) 13 47 –DB (6)
+DB (7) 14 48 –DB (7)
+DB (P) 15 49 –DB (P)
DIFFSENS 16 50 GROUND
TERMPWR 17 51 TERMPWR
TERMPWR 18 52 TERMPWR
RESERVED 19 53 RESERVED
+ATN 20 54 –ATN
GROUND 21 55 GROUND
+BSY 22 56 –BSY
+ACK 23 57 –ACK
+RST 24 58 –RST
+MSG 25 59 –MSG
+SEL 26 60 –SEL
+C/D 27 61 –C/D
+REQ 28 62 –REQ
+I/O 29 63 –I/O
GROUND 30 64 GROUND
+DB (8) 31 65 –DB (8)
+DB (9) 32 66 –DB (9)
+DB (10) 33 67 –DB (10)
+DB (11) 34 68 –DB 11)
Notes:
1. The minus sign next to a signal name indicates asserted state is the low
voltage.
2. Eight-bit devices (non-wide) connected to the P cable must leave the
following signals open: –DB (12) –DB (13) –DB (14) –DB (15) –DB (P1)
–DB (8) –DB (9) –DB (10) –DB (11) +DB (12) +DB (13) +DB (14) +DB (15)
+DB (P1) +DB (8) +DB (9) +DB (10) +DB (11). Connect all other signals
as defined.
Page 75

Elite 9 Product Manual, Rev. C 65
11.9 Disc drive SCSI timing
Table 14. Disc drive SCSI timing
Waveform Waveform
Description symbol [1] table [1] Typical Max
Target select time (no arbitration) T00 N/A < 1 µs < 250 µs
Target select time (with arbitration) T01 4.5-1,2 2.31 µs 2.36 µs
Target select to command T02 4.5-1 3.33 µs 3.34 µs
Target select to MSG out T03 4.5-2 1.51 µs 1.54 µs
Identify MSG to command T04 4.5-3 3.34 µs 3.36 µs
Command to status T05 4.5-5 Command dependent
Command to data (para. in) T06 4.5-9 Command dependent
Command to data (para. out) T07 4.5-10 Command dependent
Command to data (write to data buffer) T08 4.5-10 Command dependent
Command to disconnect MSG T09 4.5-6 Command dependent
Disconnect MSG to bus free T10 4.5-6,14 0.64 µs 0.68 µs
Disconnect to arbitration (for re-select) T11 4.5-6 Command dependent
This measures disconnected CMD overhead
Target win arbitration (for re-select) T12 4.5-7 2.8 µs
Arbitration to re-select T13 4.5-7 1.8 µs
Re-select to Identify MSG in T14 4.5-7 1.34 µs
Re-select Identify MSG to status T15 4.5-8 Command dependent
Re-select Identify MSG to data (media) T16 4.5-11 Command dependent
Data to status T17 4.5-15 Command dependent
Status to command complete MSG T18 4.5-5,8,15 1.0 µs
Command complete MSG to bus free T19 4.5-5,8,15 0.75 µs
Data to save data pointer MSG T20 4.5-14 4.5 µs
Save data pointer MSG to disconnect MSG T21 4.5-14 0.75 µs
Command byte transfer T22 4.5-4 0.04
Next command byte access 4.5-4
Next CDB byte access (byte 2 of 6) T23.6.2 4.5-4 0.55 µs 0.56 µs
Next CDB byte access (byte 3 of 6) T23.6.3 4.5-4 0.10 µs 0.10 µs
Next CDB byte access (byte 4 of 6) T23.6.4 4.5-4 0.09 µs 0.10 µs
Next CDB byte access (byte 5 of 6) T23.6.5 4.5-4 0.13 µs 0.14 µs
Next CDB byte access (byte 6 of 6) T23.6.6 4.5-4 0.13 µs 0.14 µs
Next CDB byte access (byte 2 of 10) T23.10.2 4.5-4 0.59 µs 0.60 µs
Next CDB byte access (byte 3 of 10) T23.10.3 4.5-4 0.14 µs 0.14 µs
Next CDB byte access (byte 4 of 10) T23.10.4 4.5-4 0.13 µs 0.14 µs
Next CDB byte access (byte 5 of 10) T23.10.5 4.5-4 0.12 µs 0.12 µs
Next CDB byte access (byte 6 of 10) T23.10.6 4.5-4 0.11 µs 0.12 µs
Next CDB byte access (byte 7 of 10) T23.10.7 4.5-4 0.10 µs 0.10 µs
Next CDB byte access (byte 8 of 10) T23.10.8 4.5-4 0.09 µs 0.10 µs
Next CDB byte access (byte 9 of 10) T23.10.9 4.5-4 0.13 µs 0.14 µs
Next CDB byte access (byte 10 of 10) T23.10.10 4.5-4 0.12 µs 0.12 µs
continued
Page 76

66 Elite 9 Product Manual, Rev. C
continued from previous page
Waveform Waveform
Description symbol [1] table [1] Typical Max
Data in byte transfer (parameter) T24 4.5-12 0.04 µs
Data out byte transfer (parameter) T25 4.5-13 0.04 µs
Next data in byte access (parameter) T26 4.5-12 0.10 µs 0.12 µs
Next data out byte access (parameter) T27 4.5-13 0.10 µs 0.12 µs
Data in byte transfer (media) [2] T28 4.5-12 0.03 µs 0.04 µs
Data out byte transfer (media) [2] T29 4.5-13 0.03 µs 0.04 µs
Next data in byte access (media) [2] T30 4.5-12 0.10 µs 0.12 µs
Next data out byte access (media) [2] T31 4.5-13 0.10 µs 0.12 µs
MSG IN byte transfer T32 4.5-5,7 0.09 µs 0.04 µs
4.5-8,14,15
MSG OUT byte transfer T33 4.5-2 0.04 µs
STATUS byte transfer T34 4.5-5,8 0.04 µs
4.5-15
Synchronous data transfer characteristics:
Request signal transfer period [3] – – various 800 ns
Notes:
[1] See the
[2] Maximum SCSI asynchronous interface transfer rate is 10 Mbytes/sec for non-wide SCSI and
20 Mbytes/sec for wide SCSI as shown in Section 5.3.
[3] Synchronous transfer period is determined by negotiations between an initiator and a drive. The
drive is capable of setting periods as given in Section 11.5 in this manual . See also Sections
3.1.5.2 and 3.5.3.2 of the
data transfer operation.
SCSI-2 Interface Product Manual
SCSI-2 Interface Product Manual
(part number 77738479), Section 4.5.
for a description of synchronous
General timing diagrams for SCSI interface operation are shown in the
Manual,
Section 4.5.
SCSI-2 Interface Product
Page 77

Elite 9 Product Manual, Rev. C 67
Index
Symbols
+12V current profile 28
A
AC power requirements 25
acoustics 31
adaptive read lookahead 15
adaptive thermal compensation 11
air cleanliness requirements 31
air flow 20
altitude, effective limits 29
asynchronous
SCSI bus conditions supported 51
auto-write and auto-read reallocation 7
automatic
adaptive thermal compensation 11
shipping lock 6
thermal compensation 11
DC
cable and connector 52
power requirements 25
defect and error management 37
diameter, media (disc) 35
differential
drivers/receivers 57
differential I/O cable requirements 54, 55
digital offset values 18
dimensions
drive 7
J4A connector 43
mounting configuration 32
disc rotation speed 11
disconnect/reconnect 5
drive
defect and error management 37
defects list 37
failure, defined 20
orientation 33
termination 9, 41
drivers and receivers 42
B
bytes, number of 11
C
cable pin assignments
differential 61
single-ended 60
cable requirements 54
cache control 14
caching write data 15
capacities 8
commands supported, SCSI interface 46
conducted noise immunity 27
connector parts for DC power connection 52
cooling, mechanical 33
current requirements 25
D
daisy chaining multiple SCSI devices 54
data block size, modifying the 8
data buffer 7
data buffer to/from disc media 13
data heads, number of 11
E
effective altitude (sea level) 29
electromagnetic
compatibility 31
interference (EMI) 19
embedded SCSI controller 5
EMC/regulatory requirements, meeting 3
environmental
limits 29
environmental interference 19
environmental limits 29
error correction code 7
error rates 19
ETF defect list 37
external terminator 8
F
fans, positioning for cooling 20
features, listed 7
flaw reallocation performance impact 13
form factor 7
Format Drive command execution time 12
formatted capacities 8
Page 78

68 Elite 9 Product Manual, Rev. C
formatting 9
front panel 8
G
grounding 43
H
head and disc assembly (HDA) 5
cooling 20
head switch overhead time 13
heat and power dissipation 28
humidity 29
I
I/O circuits 54
index signal 17
inquiry data 48
installation 23
instructions 9
plug in and play 23
service tools 23
interface requirements 45
interleave
1:1 7
minimum sector 13
internal data rate 11
internal terminator 8
J
J4A connector, dimensions 43
jumper connectors
explained 41
illustrated 40
L
landing zone 6
logical block size 7
M
mean time between failures (MTBF) 20
mechanical specifications 32
media characteristics and description 35
messages supported by the SCSI interface 45
miscellaneous operating features sup-
ported 51
miscorrected data transferred 19
Mode Select command 14
Mode Sense data 49
modifying capacities 8
Motor Start command 13
mounting configuration dimensions 32
MTBF 19
multiple initiators 5
N
noise
defined and maximum allowed 27
minimizing 55
O
offset values 18
one-track cylinder switch overhead time 13
operating current 25, 26
option/configuration headers 39
options 8
overhead time 13
P
panel, front 8
performance
general 8, 13
susceptibility 31
physical, rotational offsets 18
physical/electrical specifications 25
power
control switch 13
dissipation 6
requirements, AC and DC 25
sequencing 27
prefetch/multi-segmented cache control 14
preventive maintenance 19, 23
primary defect list 37
R
R/CYHX temperature, measuring 22
radiated emissions, characterizations 3
recoverable error rate 19
Reed-Solomon error correction code 7
reference documents 3
reference index signal 42
termination 43
reference signal 17, 18
Page 79

Elite 9 Product Manual, Rev. C 69
reformatting 9
relative humidity 29
reliability
general 8
service, and 20
specifications 19
REQ/ACK offset 52
rotation speed 11
rotational
latency, average 11
offset 18
position locking 17
skew, operating the drive with 18
S
safety agencies, certification 3
safety/regulatory agency compliance 3
SCSI
bus conditions and misc. features 51
bus transfers 7
timing 65
SCSI interface
cable connector requirements 55
commands supported 46
electrical description
differential drivers/receivers 55
single-ended drivers/receivers 55
messages supported by the 45
physical connections 53
terminator requirements 58
transfer rate 13
SCSI physical interface 53
non-wide 59
wide 62
sector
size, allowable range 13
sector reallocation 7
seek
error rate 19
errors, defined 20
times, listed 12
seek errors 20
self-configuring host software 5
service
life 19, 23
philosophy 23
tools 23
servo heads 11
shielded SCSI I/O cable 9
shock 29, 30
single-ended drivers/receivers 56
single-ended I/O cable requirements 54
single-unit shipping pack 8
spare reallocation 8
spindle
brake 7
enabling and disabling 18
stopping with the Motor Start command 13
synchronization mode 18
spindle sync cable connector 41
SSREF+ 17
start current 25, 26
start/stop time 13
surface, number of bytes per 11
synchronized
drive interconnect diagram 16
reference signal 17
spindle operation 15
spindles interface 42
synchronous data transfer 52
T
temperature
measurement locations 22
operating and non-operating 29
terminating
differential drivers and receivers 57
drives 9, 54, 56
SCSI devices 54
terminator
option jumper connectors 41
power 41, 59
requirements 58
track, number of bytes per 11
tracks, number of 11
tracks per inch, number of 11
U
UL 3
unformatted capacities 8
unit attention 18
unrecoverable
error, defined 19
write errors, defined 19
Page 80

70 Elite 9 Product Manual, Rev. C
unrecovered data transferred 19
V
vibration 29, 30
VIC 2 LSI 17
voltage requirements 25
W
write data, caching 15
write errors 19
Write Protect option 41
Page 81

Elite 9 Product Manual, Rev. C 71
Page 82

Seagate Technology, Inc.
920 Disc Drive, Scotts Valley, California 95066-4544, USA
Publication Number: 83328860, Rev. C, Printed in USA
 Loading...
Loading...