

Page 1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Barracuda ATA II 100 Family
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ST330631A, ST320424A
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ST315324A, ST310216A
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ultra ATA Interface Drives
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Product Manual
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Page 2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Barracuda ATA II 100 Family
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ST330631A, ST320424A
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ST315324A, ST310216A
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ultra ATA Interface Drives
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Product Manual
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Page 3

2000 Seagate Technology, Inc. All rights reserved
Publication Number: 20400236-001, Rev. A, June 2000
Seagate, Seagate Technology, the Seagate logo, Bar racuda, SeaShield
and SeaShell are either registered trademarks or trademarks of Seagate
Technology, Inc. Other product names are registered trademarks or
trademarks of their owners.
Seagate reserves the right to change, without notice, product offerings
or specifications. No part of this publication may be reproduced in any
form without written permission fro m Seagate Technology, Inc.
Page 4
Barracuda ATA II 100 Family Product Manual, Rev. A iii
Contents
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Specification summary table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.0 Drive specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1 Formatted capacity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.1 Default logical geometry . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Physical organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Recording and interface technology . . . . . . . . . . . . . . . . . . . . 6
1.4 Physical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5 Seek time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.6 Start/stop times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.7 Power specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.7.1 Power consumption . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.7.2 Conducted noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.7.3 Voltage tolerance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.7.4 Power-management modes . . . . . . . . . . . . . . . . . . . . . 10
1.8 Environmental tolerances . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.8.1 Ambient temperature . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.8.2 Temperature gradient . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.8.3 Humidity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.8.4 Altitude . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.8.5 Shock . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.8.6 Vibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.9 Drive acoustics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.10 Electromagnetic immunity . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.11 Reliability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.12 Agency certification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.12.1 Safety certification . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.12.2 Electromagnetic compatibility . . . . . . . . . . . . . . . . . . . 15
1.12.3 FCC verification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Page 5
iv Barracuda ATA II 100 Family Product Manual, Rev. A
2.0 Configuring and mounting the drive . . . . . . . . . . . . . . . . . . . 17
2.1 Handling and static-discharge precautions . . . . . . . . . . . . . . 17
2.2 Jumper settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2.1 Master/slave configuration . . . . . . . . . . . . . . . . . . . . . . 18
2.2.2 Cable-select option . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.3 Alternate capacity jumper . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.4 Ultra ATA/100 cable . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.1 Drive mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.0 ATA interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1 ATA interface signals and connector pins . . . . . . . . . . . . . . 21
3.1.1 Supported ATA commands . . . . . . . . . . . . . . . . . . . . . . 23
3.1.2 Identify Device command . . . . . . . . . . . . . . . . . . . . . . . 24
3.1.3 Set Features command . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1.4 S.M.A.R.T. commands . . . . . . . . . . . . . . . . . . . . . . . . . 30
Page 6
Barracuda ATA II 100 Family Product Manual, Rev. A v
Figures
Figure 1. Typical startup and operation current profile . . . . . . . . . . . . 9
Figure 2. Master/slave jumper settings . . . . . . . . . . . . . . . . . . . . . . . 18
Figure 3. Mounting dimensions—top, side and end view . . . . . . . . . 20
Figure 4. I/O pins and supported ATA signals. . . . . . . . . . . . . . . . . . 22
Page 7
vi Barracuda ATA II 100 Family Product Manual, Rev. A
Page 8
Barracuda ATA II 100 Family Product Manual, Rev. A 1
Introduction
This manual describes the functional, mechanical and interface specifications for the ST330631A, ST320424A, ST315324A and the
ST310216A. These drives provide the following key features:
Low power consumption
•
Quiet operation
•
High instantaneous ( burst) data-tr ansfer rate s (up to 100 Mbyte s per
•
second) using Ultra DMA mode 5
7,200-RPM spindle spe ed and 2-Mbyte buffer combine for superi or
•
desktop performance
300 Gs nonoperating shock
•
Giant magnetoresistive (GMR) recording heads and EPRML technol-
•
ogy, which provide the drives with increased areal density
State-of-the-art cache and on-the-fly error-correction algorithms
•
Full-track multiple-sector transfer capability without local processor
•
intervention
Support for S.M.A.R.T. drive monitoring and reporting
•
Support for drive self-test (DST) with S.M.A.R.T. Execute Off-line
•
Immediate
Support for Read Multiple and Write Multiple commands
•
Support for autodetection of master/slave drives that use cable select
•
(CSEL)
The innovative, shock- ab so rb ing SeaS hi el d
•
against electrostatic discharge ( ESD) and other handling d amage. It
also includes installation instructions and jumper settings.
SeaTools diagnostic software performs a drive self-test that eliminates
•
unnecessary drive returns.
®
cover protects the drive
Page 9
2 Barracuda ATA II 100 Family Product Manual, Rev. A
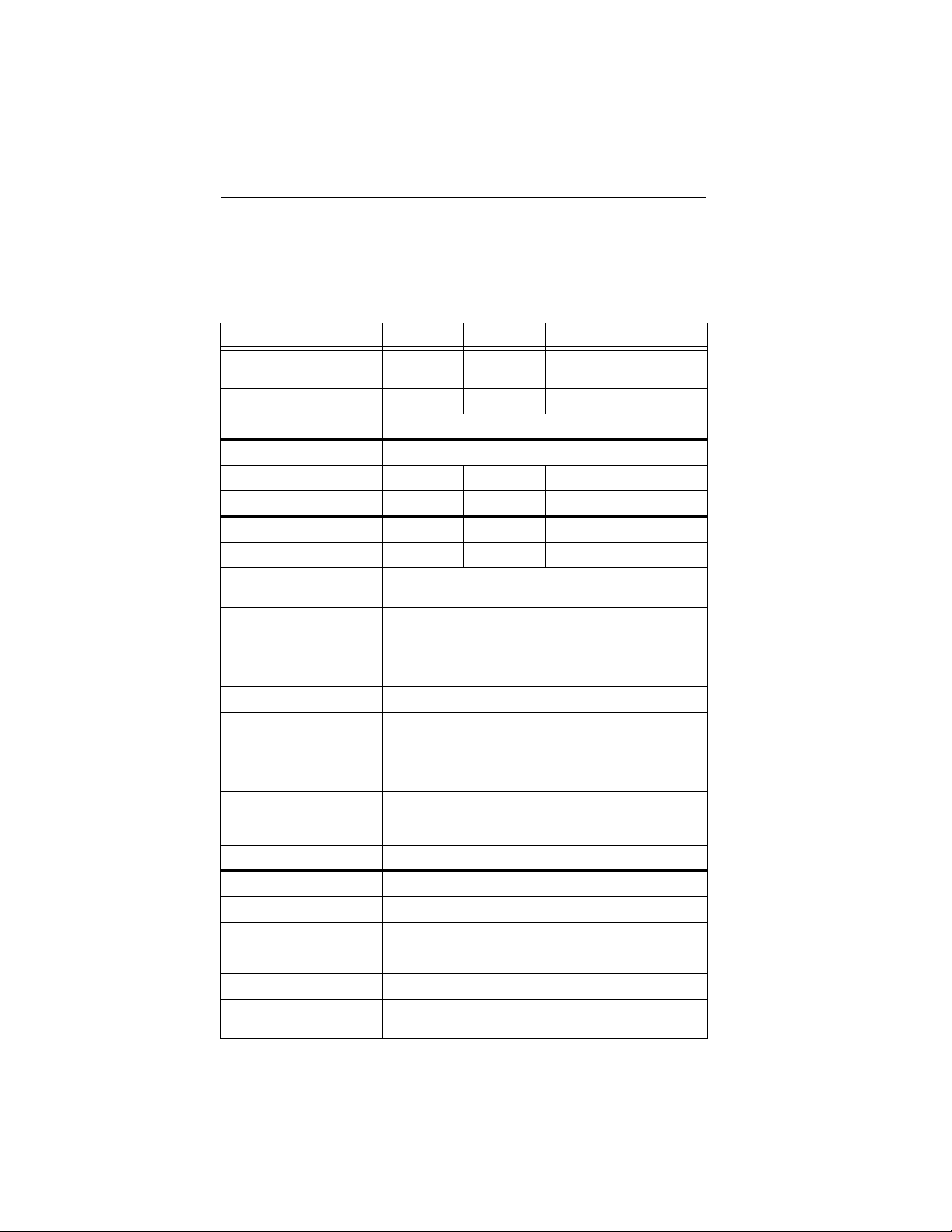
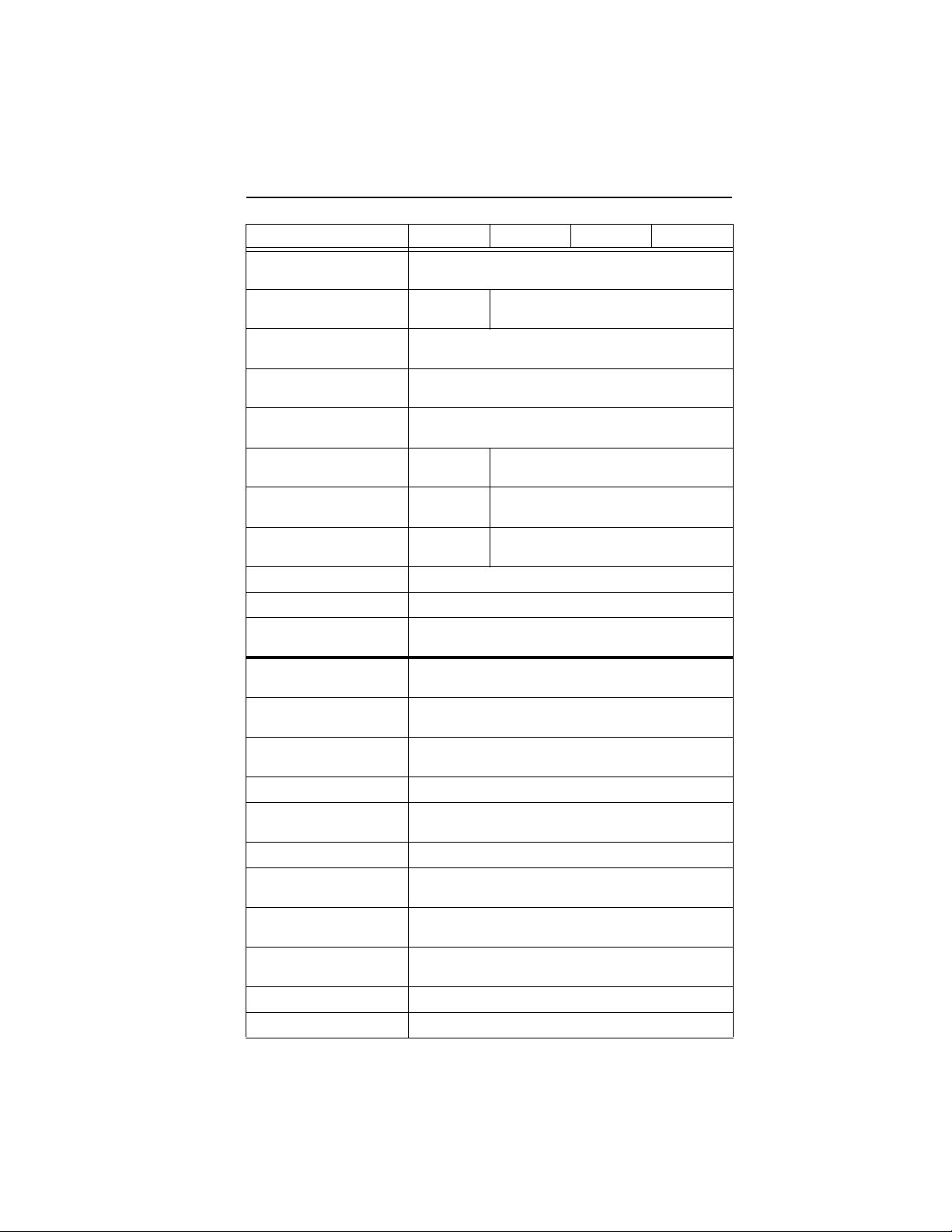
Specification summary table
The specifications listed in this table are for quick reference. For details
on specification measurement or definition, see the appropriate section
of this manual.
Drive Specification ST330631A ST320424A ST315324A ST310216A
Guaranteed Mbytes
6
bytes) 30,606 20,404 15,303 10,202
(×10
Guaranteed sectors 59,777,640 39,851,760 29,888,820 19,925,880
Bytes per sector 512
Default sectors per track 63
Default read/write heads 16 16 16 16
Default cylinders 16,383 16,383 16,383 16,383
Physical read/write heads 6432
Discs 3221
Recording density
BPI (bits/inch max) 357,452
Track density
TPI (tracks/inch) 21,368
Areal density
(Mbits/inch
Spindle speed (RPM) 7,200
Internal data-transfer rate
(Mbits/sec max)
I/O data-transfer rate
(Mbytes/sec max)
ATA data-transfer modes
supported
Cache buffer 2 Mbytes
Height (mm max) 26.1
Width (mm max) 101.8
Length (mm max) 147.0
Weight (typical) 544 grams (1.2 lb)
Average latency (msec) 4.16 msec
Power-on to ready
(sec typical) 11 sec
2
max) 7,638
PIO modes 0–4
Multiword DMA modes 0–2
Ultra DMA modes 0–5
364
100
Page 10
Barracuda ATA II 100 Family Product Manual, Rev. A 3
Drive Specification ST330631A ST320424A ST315324A ST310216A
Standby to ready
(sec typical) 10 sec
Startup current
(typical) 12V (peak) 2.4 amps 2.0 amps
Track-to-track seek time
(msec typical) 1.2
Average seek time
(msec typical) 8.2
Full-stroke seek time
(msec max) 17.8 (read), 19.3 (write)
Seek power
(typical) 12.5 watts 11.6 watts
Read/Write power
(typical) 9.7 watts 8.5 watts
Idle mode
(typical) 8.0 watts 7.0 watts
Standby mode 1.5 watts (typical), 1.7 watts (max)
Sleep mode 0.8 watts (typical), 0.9 watts (max)
Voltage tolerance
(including noise)
Ambient temperature 0° to 55°C (op.), –40° to 65°C (nonop.)
Temperature gradient
(°C per hour max) 20°C
Relative humidity
(op. and nonop.)
Relative humidity gradient 30% per hour max
Wet bulb temperature
(°C max) 29.4 (op.), 29.4 (nonop.)
Altitude, operating –122 m to 3,048 m (–400 ft to 10,000
Altitude (meters below mean
sea level, max) –122 m to 12,192 m (–400 ft to 40,000
Shock, operating
(Gs max at 2 msec) 63
Shock, nonoperating
(Gs max at 2 msec) 300 Gs
Vibration, operating 0.5 Gs (0 to peak, 5–300 Hz)
Vibration, nonoperating 5 Gs (0 to peak, 5–300 Hz)
5V ± 5% – 0.7 amps max
12V + 10%, – 5% – 2.4 amps max
5° to 55°C (op. for FDB motor)
8% to 80% (op.)
5% to 90% (nonop.)
+
+
ft)
ft)
Page 11
4 Barracuda ATA II 100 Family Product Manual, Rev. A
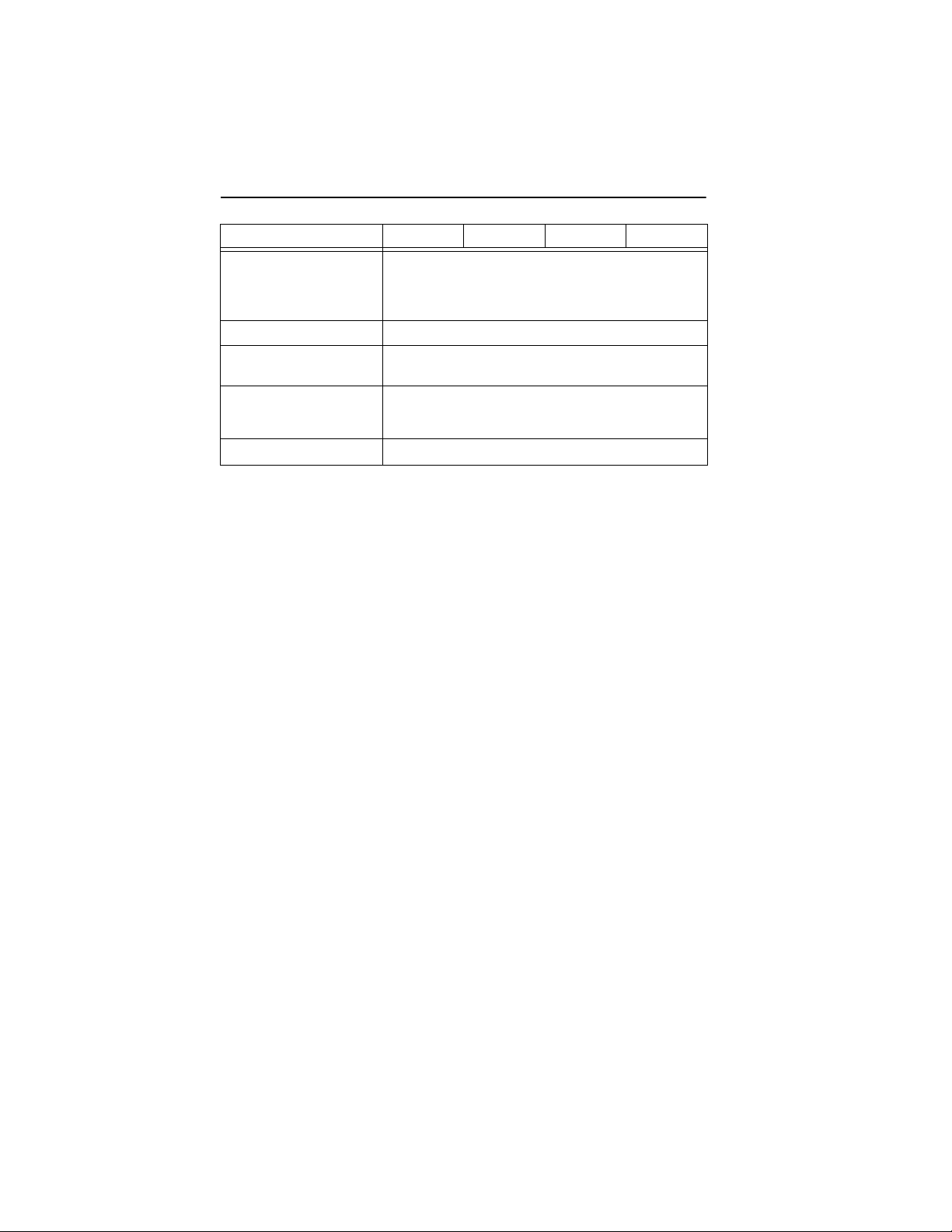
Drive Specification ST330631A ST320424A ST315324A ST310216A
Drive acoustics
Sound pressure (dBA)
Idle mode
Seek mode
Nonrecoverable read errors 1 per 10
Mean time between failures
(power-on hours) 500,000
Contact start-stop cycles
(25°C, 40% relative
humidity) 50,000
SeaShield Yes
34.0 (typical), 39.0 (max)
39.0 (typical), 43.5 (max)
14
bits read
Page 12
Barracuda ATA II 100 Family Product Manual, Rev. A 5
1.0 Drive specifications
Unless otherwise noted, all specifications are measured under ambient
conditions, at 25 °C, and no min al power. For convenie nce, the phrases
the drive
ST330631A, ST320424A, ST315324A and the ST310216A.
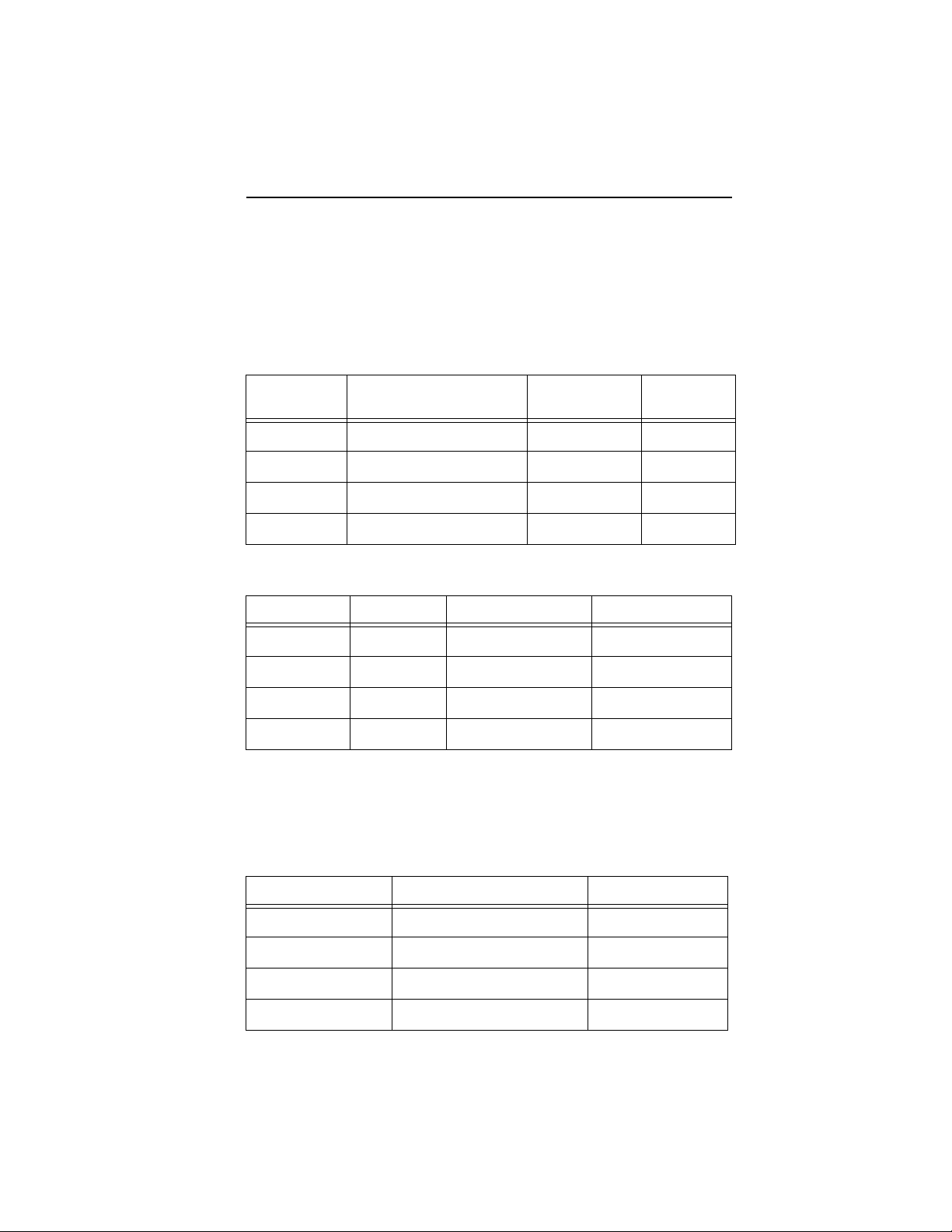
1.1 Formatted capacity
and
this drive
are used throughout this manu al to indi cate the
Drive
Model
Guaranteed Mbytes
(1 Mbyte = 10
6
bytes)
Guaranteed
sectors
Bytes per
sector
ST330631A 30,606 59,777,640 512
ST320424A 20,404 39,851,760 512
ST315324A 15,303 29,888,820 512
ST310216A 10,202 19,925,880 512
1.1.1 Default logical geometry
CHS Mode Cylinders Read/Write heads Sectors per track
ST330631A 16,383 16 63
ST320424A 16,383 16 63
ST315324A 16,383 16 63
ST310216A 16,383 16 63
LBA Mode
When addressing these drives in LBA mode, all blocks (se ctors) are
consecutively numbered from 0 to
guaranteed sectors as defined above
n–1,
.
where
n is
the number of
1.2 Physical organization
Drive Model Read/Write heads (GMR) Number of discs
ST330631A 6 3
ST320424A 4 2
ST315324A 3 2
ST310216A 2 1
Page 13

6 Barracuda ATA II 100 Family Product Manual, Rev. A
1.3 Recording and interface technology
Interface ATA
Recording method 16/17 EPRML
Recording density BPI (bits/inch) 357,452
Track density TPI (tracks/inch) 21,368
2
Areal density (Mbits/inch
Spindle speed (RPM) (± 0.2%) 7,200
Internal data-transfer rate
(Mbits/sec max)
max) 7,638
364
I/O data-transfer rate
(Mbytes/sec max)
Interleave 1:1
Cache buffer 2 Mbytes
16.6 (PIO mode 4)
100 (Ultra DMA mode 5)
1.4 Physical characteristics
Drive Specification ST330631A, ST320424A,
ST315324A, ST310216A
Maximum height (mm)
(inches)
Maximum width (mm)
(inches)
Maximum length (mm)
(inches)
Typical weight (grams)
(pounds)
26.1
1.028
101.8
4.020
147.0
5.78
544
1.2
1.5 Seek time
Seek measurements are taken with nominal power at 25°C ambient
temperature. All times are measured using drive diagnostics. The specifications in the table below are defined as follows:
•
Track-to-track seek time is an average of all possible single-track
seeks in both directions.
•
Average seek time is a true statistical random average of at least 5,000
measurements of seeks between random tracks, less overhead.
Page 14

Barracuda ATA II 100 Family Product Manual, Rev. A 7
•
Full-stroke seek time is one-half the time needed to seek from the first
data cylinder to the maximum data cylind er an d b ac k t o th e fi rst dat a
cylinder. The full-stroke typic al v al ue is determined by averaging 100
full-stroke seeks in both directions.
Typ ical seek times (mse c) Read Write
T rack-to-track 1.2 1.9
Av erage 8.2 9.5
Full-stroke (max) 17.8 19.3
Av erage lat ency: 4 .16 msec — —
Note.
These drives are designed to consistently meet the seek times represented in this manual. Physical seeks, regardless of mode (such as
track-to-track and average) are expected to meet or exceed the noted
values. However, due to the manner in which these drives are formatted, benchmark tests that include command overhead or measure
logical seeks may produce results that vary from these specifications.
1.6 Start/stop times
Power-on to Ready (sec) 11 (typical)
Standby to Ready (sec) 10 (typical)
Ready to spindle stop (sec) 8 (typical)
1.7 Power specifications
The drive receives DC power (+5V or +12V) through a four-pin standard
drive power connector.
1.7.1 Power consumption
Power requirements for the drives are listed in the table on pag e 9.
Typical power measurements are based on an average of drives tested,
under nominal conditions, using 5.0V input voltage at 25°C ambient
temperature.
Spinup power
•
Spinup power is measured from the time of power-on to the time that
the drive spindle reaches operating speed.
Seek Mode
•
During seek mode, the read/write actuator arm moves toward a
specific position o n the disc surface an d does not execute a read or
Page 15

8 Barracuda ATA II 100 Family Product Manual, Rev. A
write operation. S ervo e lectron ics are ac tive. Seek mode p ower represents the worst-case power consumption, using only random seeks
with read or write latency time. This mode is not typical and is provided
for worst-case information.
Read/Write power and current
•
Read/write power is measured with the heads on trac k, based on a
16-sector write follow ed by a 32-msec delay, then a 16 -sector read
followed by a 32-msec delay.
Operating power and current
•
Operating power is measured using 40 percent random seeks, 40
percent read/write mode (1 write for each 10 reads) and 20 pe rcent
drive inactive.
Idle mode power
•
Idle mode power is measured with the drive up to spee d, with ser vo
electronics active and with the heads in a random track location.
Standby mode
•
During Standby mode , the drive a ccepts comm ands, but the drive is
not spinning, and the servo a nd read/write electronic s are in p owerdown mode.
Page 16

Barracuda ATA II 100 Family Product Manual, Rev. A 9
ST320424A, ST315324A and ST310216A Typical Amps RMS
Power Mode
Typical Watts RMS
5V 12V
Spinup — — 2.0 (peak)
Seeking (Random,
no read/write) 11.6 0.605 0.713
Operating (read/write) 8.5 0.609 0.449
Idle 7.0 0.480 0.384
Standby 1.5 0.258 0.007
Sleep 0.8 0.149 0.007
ST330631A Typical Amps RMS
Power Mode Typical Watts RMS 5V 12V
Spinup — — 2.4 (peak)
Seeking (Random,
no read/write) 12.5 0.602 0.793
Operating (read/write) 9.7 0.619 0.544
Idle 8.0 0.533 0.473
Standby 1.5 0.254 0.006
Sleep 0.8 0.145 0.006
1.7.1.1 Typical current profile
2.5
2.0
1.5
1.0
Current (Amps)
0.5
0
012345678910
Time (seconds)
Figure 1. Typical startup and operation current profile
Page 17

10 Barracuda ATA II 100 Family Product Manual, Rev. A
1.7.2 Conducted noise
Input noise ripple i s mea su re d a t the host system powe r su ppl y ac ross
an equivalent 80-ohm resistive load on the +12 volt line or an equivalent
15-ohm resistive load on the +5 volt line.
•
Using 12-volt power, the drive is expected to operate with a maximum
of 120 mV peak-to-peak square-wave injected noise at up to 10 MHz.
•
Using 5-volt power, th e dri ve is expec ted to op er ate with a ma xi mum
of 100 mV peak-to-peak square-wave injected noise at up to 10 MHz.
Note.
Equivalent resis tance is calcu lated by dividing the nomina l voltage by the typical RMS read/write current.
1.7.3 Voltage tolerance
Voltage tolerance (incl udi ng noi se ):
5V ± 5% 0.7 amps max
12V + 10%, – 5% 2.4 amps max
1.7.4 Power-management modes
The drive provides programmable power management to provide greater energy efficiency . In m ost syst ems, you can control power mana gement through the system setup program. The drive features the following
power-management modes:
Power Modes Heads Spindle Buffer
Active Tracking Rotating Enabled
Idle Tracking Rotating Enabled
Standby Parked Stopped Enabled
Sleep Parked Stopped Disabled
Active mode
•
The drive is in Active mode during the read/write and seek operations.
Idle mode
•
The buffer remains enabled, and the drive accepts all commands and
returns to Active mode any time disc access is necessary.
Page 18

Barracuda ATA II 100 Family Product Manual, Rev. A 11
Standby mode
•
The drive enters Standby mode when the host sends a Standby
Immediate command. If the hos t has set th e standb y timer, the drive
can also enter Standby mo de automatical ly after the drive has been
inactive for a specifia ble length of time. The standby timer delay is
established using a Standby or Idle command. In Standby mode, the
drive buffer is enabled, the heads are parked and the spindle is at rest.
The drive accepts all commands and returns to Active mode any time
disc access is necessary.
Sleep mode
•
The drive enters Sleep mode after receivi ng a Sleep co mmand from
the host. In S leep mode, the drive buffer is disabl ed, the heads are
parked and the spindle is at res t. The drive l eaves Sleep m ode after
it receives a Hard Reset or Soft Reset from the host. After receiving a
reset, the drive exits Sleep mo de and enters Standby mode with all
current translation parameters intact.
Idle and Standby timers
•
Each time the drive performs an Active function (read, write or seek),
the standby timer is rein itialized and begins counting do wn from its
specified delay times to zero. If the standby timer reaches zero before
any drive activity is re q ui red, th e d ri v e m ake s a transition to Standby
mode. In both Idle and Standby mode, the drive accepts all commands
and returns to Active mode when disc access is necessary.
1.8 Environmental tolerances
1.8.1 Ambient temperature
Ambient temperature i s def ined as the temperatur e o f t he env ir on men t
immediately surrounding the drive. Actual drive case temperature should
not exceed
ommended measurement locations are shown in Figure 3 on page 20.
Above 1,000 feet (305 m eters), the maximum temperat ure is derated
linearly to 112°F (44°C) at 10,000 feet (3,048 meters).
Operating 0° to 55°C (32° to 131°F)
Nonoperating –40° to 65°C (–40° to 149°F)
69°C (156°F) within the operating ambient conditions. Rec-
5° to 55°C (41° to 131°F)
Fluid dynamic bearing (FDB) motor
Page 19

12 Barracuda ATA II 100 Family Product Manual, Rev. A
1.8.2 Temperature gradient
Operating/Nonoperating 20°C per hour (36°F per hour) max,
without condensation
1.8.3 Humidity
1.8.3.1 Relative Hum idity
Operating 8% to 80% noncondensing (30% per hour max)
Nonoperating 5% to 90% noncondensing (30% per hour max)
1.8.3.2 Wet bulb temperature
Operating 29.4°C (84°F) max
Nonoperating 40.0°C (104°F) max
1.8.4 Altitude
Operating –122 m to 3,048 m (–400 ft to 10,000+ ft)
Nonoperating –122 m to 12,192 m (–400 ft to 40,000+ ft)
1.8.5 Shock
All shock specifications assume that the drive is mounted securely with
the input shock appli ed at the drive mounting screws. Sh ock may be
applied in the X, Y or Z axis.
1.8.5.1 Operating shock
These drives comply with the performance levels specified in this document when subjected to a maximum op erating shock of 63 Gs (ba sed
on half-sine shock p ulses of 2 msec). Sh ocks should not be repe ated
more than two times per second.
1.8.5.2 Nonoperating shock
The nonoperating shock level that the drive can experience without
incurring physical damage or degradation in performance when subsequently put into operation is 300 Gs (based on a nonrepetitive half-sine
shock pulse of 2 msec duration).
Page 20

Barracuda ATA II 100 Family Product Manual, Rev. A 13
1.8.6 Vibration
All vibration speci fications assume that the drive is mounted securely
with the input vibration app lied at the driv e mounting screws. Vib ration
may be applied in the X, Y or Z axis.
1.8.6.1 Operating vibration
The following table lists the maximum vibration levels that the dr ive may experience while meeting the per formance standards specifie d in this document .
5–22 Hz 0.010-inch displacement (zero to peak)
22–300 Hz 0.5 Gs acceleration (zero to peak)
1.8.6.2 Nonoperating vibration
The following table lis ts the maximum nonoperating v ibration that the
drive may experience without incurring physical damage or degradation
in performance when subsequently put into operation.
5–22 Hz 0.10-inch displacement (zero to peak)
22–300 Hz 5.0 Gs acceleration (zero to peak)
1.9 Drive acoustics
Drive acoustics are measured as overall A-weighted acoustic sound
power levels (no pure tones). All measurements are generally consistent
with ISO document 7779. Sound power measurements were taken
under essentially free-field conditions over a reflecting plane. For all
tests, the drive was oriented with the cover facing upward.
Note.
For seek mode tests, the drive was pl aced in seek mode only.
The number of seeks per second is defined by the following
equation:
(Number of seeks per second = 0.4 / (average latency + average access time)
Acoustic mode Idle mode Seek mode
Sound pressure (dBA) 34.0 (typ) 39.0 (max) 39.0 (typ) 43.5 (max)
Page 21

14 Barracuda ATA II 100 Family Product Manual, Rev. A
1.10 Electromagnetic immunity
When properly installed in a representative host system, the drive
operates without errors or deg radation in perform ance when subjecte d
to the radio frequency (RF) environments defined in the following table:
Test Description Performance
± 2
± 0.5
kV
kV;
kV
Electrostatic
discharge
Radiated RF
immunity
Electrical fast
transient
Surge
immunity
Conducted
RF immunity
Voltage dips,
interrupts
Contact, HCP, VCP: ± 4
±
8 kV
Air:
80 to 1,000 MHz, 3 V/m,
80% AM with 1 kHz sine
900 MHz, 3 V/m, 50% pulse
modulation @ 200 Hz
± 1
kV on AC mains,
on external I/O
± 1
kV differential,
common, AC mains
150 kHz to 80 MHz, 3 Vrms,
80% AM with 1 kHz sine
0% open, 5 seconds
0% short, 5 seconds
40%, 0.10 seconds
70%, 0.01 seconds
Level
B EN 61000-4-2: 95
A EN 61000-4-3: 96
B EN 61000-4-4: 95
B EN 61000-4-5: 95
A EN 61000-4-6: 97
C
C
C
B
1.11 Reliability
Nonrecoverable read errors 1 per 1014 bits read, max
Mean time between failures 500,000 power-on hours
(nominal power, 25°C ambient temperature)
Reference
Standard
ENV 50204: 95
EN 61000-4-11: 94
Contact star t-stop cycles 50 ,000 cycles
(at nominal voltage and temperature,
with 60 cycles per hou r and a 50% d uty
cycle)
Preventive maintenance None required
Page 22

Barracuda ATA II 100 Family Product Manual, Rev. A 15
1.12 Agency certification
1.12.1 Safety certification
The drives are recognized in accordance with UL 1950 and CSA C22.2
(950) and meet all applicable sections of IEC950 and EN 60950 as tested
by TUV North America.
1.12.2 Electromagnetic compatibility
Hard drives that display the CE ma rk comply wit h the European Unio n
(EU) requirements specified in the Electromagnetic Compatibility Directive (89/336/EEC). Testing is perfo rmed to the levels specified by the
product standard s for Information Technology Equ ipment (ITE). E mission levels are defi ned by EN 55022, Cl ass B and the im munity leve ls
are defined by EN 55024.
Seagate uses an independent laboratory to confirm compliance with the
EC directives speci fied in t he previous p aragrap h. Drives ar e tested in
representative end-user systems. Although CE-marked Seagate drives
comply with the dir ectives when used in the t est systems, we cannot
guarantee that all sy stems will c omply with the d irectives. Th e drive is
designed for operation inside a properly designed enclosure, with properly shielded I/O cable (if necessary) and terminators on all unused I/O
ports. Computer manuf acturers and system integrators s hould co nfirm
EMC compliance and provide CE marking for their products.
Australian C-Tick (N176)
If these models have the C-Tick marking, they comply with the Australia/
New Zealand Standard AS/NZS 3548 1995 and meet the Electrom agnetic Compatibility (EMC) Framework requirements of the Australian
Communication Authority (ACA).
1.12.3 FCC verification
These drives are intended to be contained solely within a person al computer or similar enclosure (not attached as an exter nal device). As su ch,
each drive is considered to be a subassembly even when it is individually
marketed to the customer. As a subassembly, no Federal Communications
Commission verification or certification of the device is required.
Seagate Technology, Inc. has tested this devi ce in enclosures as described above to ensure th at the total assem bly (enclo sure, disc drive,
motherboard, power supply, etc.) does comply with the limits for a Class
B computing devi ce, pursuant to Subp art J, Par t 15 of the FCC rules.
Operation with noncertified as sembl ies is likel y to resu lt in interfe rence
to radio and television reception.
Page 23

16 Barracuda ATA II 100 Family Product Manual, Rev. A
Radio and television interference. This equipment generates and
uses radio frequency energy and if not installed and used in strict
accordance with the manufacturer’s instructions, may cause interference to radio and television reception.
This equipment is desig ned to provide reasonable protection against
such interference in a residential installation. However, there is no
guarantee that interfer ence will not occur in a particu lar installation. If
this equipment does cause interference to radio or television, which can
be determined by turning the equipment on and off, you are encouraged
to try one or more of the following corrective measures:
Reorient the receiving antenna.
•
Move the device to one side or the other of the radio or TV.
•
Move the device farther away from the radio or TV.
•
Plug the computer into a different outlet so that the receiver and
•
computer are on different branch outlets.
If necessary, you s hould consult your de aler or an experienced radio/
television technician for additional suggestions. You may find helpful the
following booklet pr epared by the Federal Communications Com mis-
How to Identify and Resolve Radi o-Television Interfer ence Prob-
sion:
. This booklet is available from the Supe rintendent of Doc uments,
lems
U.S. Government Printing Office, Washington, DC 20402. Refer to publication number 004-000-00345-4.
Page 24

Barracuda ATA II 100 Family Product Manual, Rev. A 17
2.0 Configuring and mounting the drive
This section contain s th e s pec if ic ati ons an d in st ru cti on s fo r c on fig ur in g
and mounting the drive.
2.1 Handling and static-discharge precautions
After unpacking, and before installation, the drive may be exposed to
potential handling and electrostatic discharge (ESD) hazards. Observe the
following standard handling and static-discharge precautions:
Caution:
The SeaShell™ replaces electrostatic discharge (ESD) bags. The
•
SeaShell package is a shock-ribbed, transparent clamshell enclosure
that limits a drive’s exposure to ESD and also protects against external
shocks and stresses . The design permits attach ing cables, softwar e
loading and label/barc ode scanning without r emoving the drive from
the SeaShell. This minimizes handling damage. Keep the drive in the
SeaShell package until you are ready for installation.
The drive has a cover called SeaShield
•
cover—it protects the drive from electrostatic discha rge (ESD) and
minor impact damage. The SeaShield cover also includes installation
instructions and jumper settings. Removing the Sea Shield voids th e
warranty.
Before handling the drive, put on a grounde d wrist strap, or ground
•
yourself frequentl y by touching the metal chas sis of a com puter that
is plugged into a grounded outlet. Wear a grounded wrist strap
throughout the entire installation procedure.
Handle the drive by its edges or frame
•
The drive is extremely fragile—handle it with care. Do not press down
•
on the drive top cover.
Always rest the drive on a padd ed, anti static sur face unt il you mount
•
it in the computer.
Do not touch the connector pins or the printed circuit board.
•
Do not remove the factory-installed labels from the drive or cover them
•
with additional labels. Removal voids the warranty. Some factoryinstalled labels contain information needed to service the drive. Other
labels are used to seal out dirt and contamination.
Do not remove this permanent
.
only
.
Page 25

18 Barracuda ATA II 100 Family Product Manual, Rev. A
2.2 Jumper settings
2.2.1 Master/slave configuration
The options jumper block shown in Figure 2 is used to configure the drive
for operation. It is the 8-pin dual header between the interface connector
and the power connecto r. Use the following settings to con figure the
drive as a master or a slave.
Master or single drive
. The drive is configured at the factory for a master
or single-drive operation with a jumper set on pins 7 and 8.
Drive as slave
Drive as master with a non-ATA-compatible slave
Use this jumper setting
. Remove all jumpers.
only
if the drive does not work as a master with
.
no jumpers installed.
Options jumper block
Drive is slave
Master or single drive
Master with non ATAcompatible slave
Cable select
Alternate capacity
(AC)
1753
684
Figure 2. Master/slave jumper settings
2
Circuit Board
Page 26

Barracuda ATA II 100 Family Product Manual, Rev. A 19
2.2.2 Cable-select option
Computers that use cable-select determine the master and slave drives
by selecting or dese lecting pin 2 8, CSEL, on th e interface bu s. Master
and slave drives are determined by their physical position on the cable.
To enable cable select, set a jumper on pins 5 and 6 as shown in Figure
2 on page 18. Refer to your computer manual to determine whether your
computer supports this option.
2.2.3 Alternate capacity jumper
Some older computers may “hang” if their BIOS detects a hard drive that
has more than 4,092 cylinders at startup. To eliminate this problem, the
drive includes a capacity-limiting jumper that sets the drive’s default
translation geometr y to 4,092 cylinders (2.1 Gby tes ). To re al iz e th e f ull
capacity of the drive, you can use third-party software such as DiskWizard.
2.2.4 Ultra ATA/100 cable
An 80-conductor 40-pin cable is required to run Ultra DMA mode 3, mode
4 and mode 5. This cable us es even-n umbered cond uctors co nnected
to the ground pins to improve signal integrity.
Notes:
1.
The drive supports both host and drive cable detection. The host
detects the 80-conductor cable by sampling pin 34, CBLID–, on
the interface bus. The dr ive d etects the 80-cond uctor c able by
sensing a capacitor at the host side through the CBLID– signal.
The result is reported in a Fast Rise Detected bit (bit 13 of word
93 in the Identify drive parameter block).
2.
When using a 40- pin 80-con ductor cab le, attach the
black
nector to the motherboard, the
grey
drive, and the
connector to the slave.
connector to the master
blue
con-
2.1 Drive mounting
You can mount the drive in any orientation using four screws in the sidemounting holes or four screws in the bottom-mounting holes. See Figure
3 on page 20 for drive mo unting dimensions. Follow these im portant
mounting precautions when mounting the drive:
•
Allow a minimum clearanc e of 0.030 inches (0.76 mm) around the
entire perimeter of the drive for cooling.
•
Use only 6-32 UNC mounting screws.
Page 27

20 Barracuda ATA II 100 Family Product Manual, Rev. A
•
The screws should be in serted no more than 0.200 inch (5.08 mm ) into
the bottom mounting hole s and n o more than 0.1 4 inch (3 .5 5 mm) int o
the side mounting holes.
•
Do not overtighten the mounting screws (maximum torque: 6 inch-lb).
•
Do not use a drive interface cable that is more than 18 inches long.
Note. Dimensions are shown in mm (inches)
94.3± 0.8
[3.71± 0.03]
71.8± 0.8
[2.83± 0.03]
56.5 ± 0.8
[2.23 ± 0.03]
26.10 Max
[1.028]
147.00 Max
[5.787]
3X 6.35 ± 0.31
[0.250 ± 0.012]
Both Sides
Recommended
case temperature
measurement location
5.83 ± 0.38
[0.230 ± 0.015]
27.90 ± 0.27
[1.098 ± 0.011]
41.60 ± 0.33
[1.638 ± 0.013]
101.60 ± 0.33
[4.000 ± 0.013]
3X 6-32 UNC 2B
Max Insertion Depth
0.20 (5.0 mm) Both Sides
9.28 (0.365)
Pin One J2
±
40.77
0.27
±
0.011]
[1.605
44.45 ± 0.33
[1.750 ± 0.013]
4X 6-32 UNC 2B
Max Insertion
Depth 0.22 (5.6 mm)
Pin One J3
[0.125 ± 0.011]
50.3 (2.00)
Pin One J4
95.24
[3.750 ± 0.014]
3.18 ± 0.27
±
0.35
101.85 Max
[4.010 Max]
4.66± 0.38
[0.183 ± 0.015]
Recommended
case temperature
measurement location
Figure 3. Mounting dimensions—top, side and end view
Page 28

Barracuda ATA II 100 Family Product Manual, Rev. A 21
3.0 ATA interface
These drives use the industry-standard ATA task file interface that
supports 16-bit data transfers. It supports ATA programmed input/output
(PIO) modes 0–4; multi word DMA modes 0–2, and Ul tra DMA modes
0–5. The drive also supports the use of the IORDY sig nal to provide
reliable high-speed data transfers.
You can use a da isy-chain ca ble to connect two drives to a single AT
host bus. For detailed info rmati on abou t the ATA interf ace, ref er to the
draft of
NCITS T13 1153D,
dard
3.1 ATA interface signals and connector pins
Figure 4 on page 22 summarizes the signals on the ATA interface
connector that the drive supports. For a detailed des cription of these
signals, refer to the
AT Attachment with Packet Interface Extension (ATA/ATAPI-5),
subsequently referr ed to as the
.
Draft ATA-5 Standard.
Draft ATA-5 Stan-
Page 29

22 Barracuda ATA II 100 Family Product Manual, Rev. A
Drive pin #
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
Signal name
–
1
2
3
4
5
6
7
8
9
Reset
Ground
DD7
DD8
DD6
DD9
DD5
DD10
DD4
DD11
DD3
DD12
DD2
DD13
DD1
DD14
DD0
DD15
Ground
(removed)
DMARQ
Ground
DIOW–
STOP
Ground
DIOR
–
HDMARDY
HSTROBE
Ground
IORDY
DDMARDY–
DSTROBE
CSEL
–
DMACK
Ground
INTRQ
–
IOCS16
DA1
–
PDIAG
CBLID–
DA0
DA2
–
CS0
–
CS1
–
DASP
Ground
–
Host pin # and signal description
1
Hardware Reset
2
Ground
3
Host Data Bus Bit 7
4
Host Data Bus Bit 8
5
Host Data Bus Bit 6
6
Host Data Bus Bit 9
7
Host Data Bus Bit 5
8
Host Data Bus Bit 10
9
Host Data Bus Bit 4
10
Host Data Bus Bit 11
11
Host Data Bus Bit 3
12
Host Data Bus Bit 12
13
Host Data Bus Bit 2
14
Host Data Bus Bit 13
15
Host Data Bus Bit 1
16
Host Data Bus Bit 14
17
Host Data Bus Bit 0
18
Device Data (15:0)
19
Ground
(No Pin)
20
21
DMA Request
22
Ground
23
Device I/O Write:
Stop Ultra DMA Burst
24
Ground
25
Device I/O Read:
Host Ultra DMA Ready:
Host Ultra DMA Data Strobe
26
Ground
27
I/O Channel Ready
Device Ultra DMA Ready
Device Ulta DMA Data Strobe
28
Cable Select
29
DMA Acknowledge
30
Ground
31
Device Interrupt
32
Reserved
33
Host Address Bus Bit 1
34
Passed Diagnostics
Cable Assembly Type Identifier
35
Device Address (2:0)
36
Device Address (2:0)
37
Chip Select (1:0)
38
Chip Select (1:0)
39
Drive Active/Slave Present
40
Ground
Pins 28, 34 and 39 are used for master-slave communication (details shown below).
28
34
39
Drive 0 (master)Drive 1 (slave)
28
34
39
CSEL
PDIAG
DASP–
–
Host
28
34
39
Figure 4. I/O pins and supported ATA signals
Page 30

Barracuda ATA II 100 Family Product Manual, Rev. A 23
3.1.1 Supported ATA commands
The following table lis ts ATA-standard commands that the driv e supports. For a detailed description of the ATA commands, refer to the
ATA-5 Standard.
See Section 3.1.4 on page 30 for details and subcom-
mands used in the S.M.A.R.T. implementation.
Command name Command code (in hex)
ATA-standard commands
Draft
Download Microcode 92
Execute Device Diagnostics 90
Flush Cache E7
Format Track 50
Identify Device EC
Initialize Device Parameters 91
Read Buffer E4
Read DMA C8
H, C9H
Read Multip le C4
Read Sectors 20
Read Verify Sectors 40
H, 21H
H, 41H
Recalibrate 10
Seek 70
Set Features EF
Set Multiple Mode C6
H
H
H
H
H
H
H
H
H
H
H
H
S.M.A.R.T. B0
Write Buffer E8
Write DMA CA
H, CBH
Write Multiple C5
Write Sectors 30
H, 31H
H
H
H
Page 31

24 Barracuda ATA II 100 Family Product Manual, Rev. A
Command name Command code (in hex)
ATA-standard power-management commands
Check Power Mode 98
Idle 97H or E3
Idle Immediate 95H or E1
Sleep 99H or E6
Standby 96H or E2
Standby Immediate 94H or E0
or E5
H
H
H
H
H
H
H
ATA-standard security commands
Security Set Password F1
Security Unlock F2
Security Erase Prepare F3
Security Erase Unit F4
Security Freeze Lock F5
Security Disable Password F6
H
H
H
H
H
H
3.1.2 Identify Devi ce command
The Identify Device command (command code ECH) transfers information about the drive to the host following power up. The data is organized
as a single 512-byte block of data, whose contents are shown in the table
on page 25. All reserved bits or words should be set to zero. Parameters
listed with an “x” are drive-specific or vary with the state of the drive. See
Section 1 of this manual for default parameter settings.
The following commands contain drive-specific features that may not be
included in the
Draft ATA-5 Standard.
Page 32

Barracuda ATA II 100 Family Product Manual, Rev. A 25
Word Description Value
Configuration information:
•
Bit 15: 0 = ATA; 1 = ATAPI
0
•
Bit 7: removable media
•
Bit 6: removable controller
•
Bit 0: reserved
0C5A
H
1 Number of logical cylinders
2 ATA-reserved
3 Number of logical heads
4 Retired
5 Retired
6 Number of logical sectors per
logical track: 63
7–9 Retired
10–19 Serial number: (20 ASCII
characters, 0000
= none)
H
20 Retired
21 Retired
22 Obsolete
23–26 Firmware revision (8 ASCII
character string, padded with
blanks to end of string)
27–46 Drive model number: (40
ASCII characters, padded
with blanks to end of string)
16,383
0000
H
16
0000
H
0000
H
003F
H
0000
H
ASCII
0000
H
0400
H
0000
H
x.xx
ST330631A
ST320424A
ST315324A
ST310216A
47 (Bits 7–0) Maximum sectors
per interrupt on Read multi-
ple and Write multiple (16)
48 Reserved
49 Standard Standby timer,
IORDY supported and may
be disabled
50 ATA-reserved
8010
0000
2F00
0000
H
H
H
H
Page 33

26 Barracuda ATA II 100 Family Product Manual, Rev. A
Word Description Value
51 PIO data-transfer cycle
timing mode
52 Retired
53 Words 54–58, 64–70 and 88
are valid
54 Number of current logical
cylinders
55 Number of current logical
heads
56 Number of current logical
sectors per logical track
57–58 Current capacity in sectors
59 Number of sectors trans-
ferred during a Read Multiple
or Write Multiple command
60–61 Total number of user-addres-
sable LBA sectors available
62 Retired
63 Multiword DMA active and
modes supported (see note
following this table)
0200
H
0200
H
0007
H
xxxx
H
xxxx
H
xxxx
H
xxxx
H
xxxx
H
ST330631A = 59,777,640
ST320424A = 39,851,760
ST315324A = 29,888,820
ST310216A = 19,925,880
0000
H
07
xx
H
64 Advanced PIO modes sup-
ported (modes 3 and 4 sup-
ported)
65 Minimum multiword DMA
transfer cycle time per word
(120 nsec)
66 Recommended multiword
DMA transfer cycle time per
word (120 nsec)
67 Minimum PIO cycle time
without IORDY flow control
(240 nsec)
0003
0078
0078
00F0
H
H
H
H
Page 34

Barracuda ATA II 100 Family Product Manual, Rev. A 27
Word Description Value
68 Minimum PIO cycle ti me with
IORDY flow control (120
nsec)
69–74 ATA-reserved
75 Queue depth
76–79 ATA-reserved
80 Major version number
81 Minor version number
82 Command sets supported
83 Command sets supported
84 Command sets support
extension
85 Command sets enabled
86 Command sets enabled
87 Command sets enable
extension
88 Ultra DMA support and
current mode
(see note following this table)
0078
0000
0000
0000
003E
0000
306B
4001
4000
30
xx
0001
4000
3F
xx
H
H
H
H
H
H
H
H
H
H
H
H
H
89 Security erase time
90 Enhanced security erase
time
91–92 ATA-reserved
93 Hardware Reset Value
(see description following
this table)
94–127 ATA-reserved
129–159 Seagate-reserved
160–255 ATA-reserved
0000
0000
0000
4000
0000
xxxx
0000
H
H
H
H
H
H
H
Page 35

28 Barracuda ATA II 100 Family Product Manual, Rev. A
Note. See the bit descriptions below for words 63, 88 and 93 of the
Identify Drive data:
Description (if bit is set to 1)
Bit Word 63
0 Multiword DMA mode 0 is supported.
1 Multiword DMA mode 1 is supported.
2 Multiword DMA mode 2 is supported.
8 Multiword DMA mode 0 is currently active.
9 Multiword DMA mode 1 is currently active.
10 Multiword DMA mode 2 is currently active.
Bit Word 88
0 Ultra DMA mode 0 is supported.
1 Ultra DMA mode 1 is supported.
2 Ultra DMA mode 2 is supported.
3 Ultra DMA mode 3 is supported.
4 Ultra DMA mode 4 is supported.
5 Ultra DMA mode 5 is supported.
8 Ultra DMA mode 0 is currently active.
9 Ultra DMA mode 1 is currently active.
10 Ultra DMA mode 2 is currently active.
11 Ultra DMA mode 3 is currently active.
12 Ultra DMA mode 4 is currently active.
13 Ultra DMA mode 5 is currently active.
Bit Word 93
13 1 = 80-conductor cable detected, CBLID above V
0 = 40-conductor cable detected, CBL I D belo w V
IH
IL
Page 36

Barracuda ATA II 100 Family Product Manual, Rev. A 29
3.1.3 Set Features command
This command control s the im pl eme ntat ion of various features that th e
drive supports. When the drive receives this command, it sets BSY,
checks the contents of the Features register, clears BSY and generates
an interrupt. If the value in the register does not represent a feature that
the drive supports, th e command is aborted . Power-on d efault has the
read look-ahead and write caching features enabled. Th e acceptable
values for the Features register are defined as follows:
02
03
55
82
AA
F1
Enable write cache
H
Set transfer mode (based on value in Sector Count register).
H
(default).
Sector Count register values:
00
Set PIO mode to default (PIO mode 2).
H
01
Set PIO mode to default and disable IORDY
H
(PIO mode 2).
08
PIO mode 0
H
PIO mode 1
09
H
0A
PIO mode 2
H
0B
PIO mode 3
H
0C
H
PIO mode 4
(default)
20HMultiword DMA mode 0
21
Multiword DMA mode 1
H
Multiword DMA mode 2
22
H
40
Ultra DMA mode 0
H
41
Ultra DMA mode 1
H
Ultra DMA mode 2
42
H
43
Ultra DMA mode 3
H
44
Ultra DMA mode 4
H
Ultra DMA mode 5
45
H
Disable read look-ahead (read cache) feature.
H
Disable write cache.
H
Enable read look-ahead (read cache) feature
H
Report full capacity available.
H
(default).
Note.
At power-on, or after a hardware or software reset, the default
values of the features are as indicated above.
Page 37

30 Barracuda ATA II 100 Family Product Manual, Rev. A
3.1.4 S.M.A.R.T. commands
S.M.A.R.T. provides near-term failure prediction for disc drives. When
S.M.A.R.T. is enabled, the drive monitors predetermined drive attributes
that are suscep tible to degradation over time. If self-monitor ing determines
that a failure is likely, S.M.A.R.T. makes a status report available to the
host. Not all failur es are predi ctable. S.M.A.R. T. predict ability is lim ited to
the attributes the drive can monito r. For more information on S.M.A.R.T.
commands and implementation, see the
SeaTools diagnostic software activates a built-in drive self-test (DST)
S.M.A.R.T. comman d for D4
that eliminat es unnecessary drive r etur ns .
H
The diagnostic soft ware ships wi th all new dri ves and is also ava ilable at :
www.seagate.com/support/npf/seatools/seatool-entry.shtml
This drive is shipped with S.M.A.R.T. features disabled. You must have
a recent BIOS or software package th at s upp orts S.M. A.R. T. to ena bl e
this feature. The table below shows the S.M.A.R.T. command codes that
the drive uses.
Draft ATA-5 Standard.
Code in Features
Register
D0
H
D1
H
D2
H
D3
H
D4
H
D7
H
D8
H
D9
H
DA
H
Note.
If an appropriate code is not written to the Features Register, the
command is aborted and 0
register.
S.M.A.R.T. Command
S.M.A.R.T. Read Data
Vendor-specific
S.M.A.R.T. Enable/Disable Attribute Autosave
S.M.A.R.T. Save Attribute Values
S.M.A.R.T. Execute Off-line Immediate
Vendor-specific
S.M.A.R.T. Enable Operations
S.M.A.R.T. Disable Operations
S.M.A.R.T. Return Status
x
04 (abort) is written to the Error
Page 38

Barracuda ATA II 100 Family Product Manual, Rev. A 31
Page 39

32 Barracuda ATA II 100 Family Product Manual, Rev. A
Seagate Technology, Inc.
920 Disc Drive, Scotts Valley, California 95066, USA
Publication Number: 20400236-001, Rev. A, Printed in USA
 Loading...
Loading...