

Page 1
.................................................
Barracuda 180 Famil y:
.................................................
ST1181677LW/LWV/LC/LCV
.................................................
.................................................
.................................................
Product Manual, Volume 1
.................................................
Page 2

Page 3

.................................................
Barracuda 180 Famil y:
.................................................
ST1181677LW/LWV/LC/LCV
.................................................
.................................................
.................................................
Product Manual, Volume 1
.................................................
Page 4

© 2000-2001 Seagate Technology LLC All rights reserved
Publication number: 100109939, Rev. C
March 2001
Seagate, Seagate Technology, and the Seagate logo are registered trademarks of Seagate Technology LLC.
Barracuda, SeaFAX, SeaFONE, SeaBOARD, and SeaTDD are either registered trademarks or trademarks of
Seagate Technology LLC. Other product names are registered trademarks or trademarks of their owners.
Seagate reserves the right to change, without notice, product offerings or specifications. No part of this publica-
tion may be reproduced in any form without written permission ofSeagate Technology LLC.
Page 5

Revision status summary sheet
Revision Date Writer/Engineer Sheets Affected
Rev. A (Class A Release) 11/9/2000 L. Newman/J. Nowitzke 1/1, v thru viii, 1-74.
Rev. B 1/17/2001 L. Newman/J. Nowitzke Page 26.
Rev. C 3/30/2001 L. Newman/J. Nowitzke Pages 21, 26, and 28.
Notice.
Product Manual 100109939 is Volume 1 of a two volume document with the SCSI interface information
in the SCSI Interface Product Manual, Volume 2, part number 75789509.
If you need the SCSI interface information, order the SCSI Interface Product Manual, Volume 2,
part number 75789509.
Page 6

Page 7

Barracuda 180 Product Manual, Rev. C v
Contents
1.0 Scope..........................................................................1
2.0 Applicable standards and reference documentation. . . .................................3
2.1 Standards. . . ..............................................................3
2.1.1 Electromagnetic compatibility . . . . . . . . . .................................3
2.1.2 Electromagnetic susceptibility. . . . . . . . . .................................3
2.2 Electromagnetic compliance . .................................................3
2.3 Reference documents .. . . . . .................................................4
3.0 Generaldescription...............................................................5
3.1 Standard features. . . . . . . . . . .................................................7
3.2 Mediacharacteristics........................................................7
3.3 Performance...............................................................7
3.4 Reliability.................................................................7
3.5 Unformattedandformattedcapacities...........................................8
3.6 Programmabledrivecapacity..................................................8
3.7 Factoryinstalledaccessories..................................................8
3.8 Options(factoryinstalled).....................................................8
3.9 Accessories(userinstalled)...................................................8
4.0 Performance characteristics . . . . . . .................................................9
4.1 Internaldrivecharacteristics(transparenttouser)..................................9
4.2 SCSIperformancecharacteristics(visibletouser) .................................9
4.2.1 Accesstime .......................................................9
4.2.2 Formatcommandexecutiontime(minutes)...............................9
4.2.3 Generalized performance characteristics .................................9
4.3 Start/stoptime ............................................................10
4.4 Prefetch/multi-segmentedcachecontrol........................................10
4.5 Cacheoperation...........................................................10
4.5.1 Cachingwritedata .................................................11
4.5.2 Prefetch operation ................................................. 12
5.0 Reliability specifications . . . . . . . . . ................................................13
5.1 Errorrates ...............................................................13
5.1.1 Environmentalinterference...........................................13
5.1.2 Read errors. . . . . . . ................................................13
5.1.3 Writeerrors.......................................................13
5.1.4 Seekerrors.......................................................13
5.2 Reliabilityandservice.......................................................14
5.2.1 Meantimebetweenfailure...........................................14
5.2.2 Fieldfailureratevs.time.............................................14
5.2.3 Preventivemaintenance.............................................15
5.2.4 Servicelife.......................................................15
5.2.5 Servicephilosophy................................................. 15
5.2.6 Servicetools......................................................15
5.2.7 HotpluggingBarracuda180discdrives.................................15
5.2.8 S.M.A.R.T. .......................................................16
5.2.9 DriveSelfTest(DST)...............................................17
5.2.10 Productwarranty...................................................18
6.0 Physical/electricalspecifications ..................................................21
6.1 ACpowerrequirements.....................................................21
6.2 DC power requirements . . . . . ................................................21
6.2.1 Conductednoiseimmunity...........................................22
6.2.2 Powersequencing .................................................22
6.2.3 12V-Currentprofile ...............................................22
6.3 Powerdissipation..........................................................24
6.4 Environmentallimits........................................................25
Page 8

vi Barracuda 180 Product Manual, Rev. C
6.4.1 Temperature ......................................................25
6.4.2 Relativehumidity...................................................25
6.4.3 Effectivealtitude(sealevel)...........................................26
6.4.4 Shockandvibration.................................................26
6.4.5 Aircleanliness.....................................................28
6.4.6 Acoustics.........................................................28
6.4.7 Electromagneticsusceptibility.........................................28
6.5 Mechanicalspecifications....................................................29
7.0 Defectanderrormanagement .....................................................31
7.1 Driveinternaldefects........................................................31
7.2 Drive error recovery procedures . . . ............................................31
7.3 SCSIsystemserrors........................................................32
8.0 Installation .....................................................................33
8.1 DriveID/optionselectheader .................................................33
8.1.1 NotesforFigures12,13,and14. ......................................36
8.1.2 Functiondescription.................................................37
8.2 Driveorientation ...........................................................38
8.3 Cooling ..................................................................38
8.4 Drivemounting ............................................................39
8.5 Grounding................................................................39
9.0 Interfacerequirements............................................................41
9.1 Generaldescription.........................................................41
9.2 SCSIinterfacemessagessupported............................................41
9.3 SCSIinterfacecommandssupported...........................................42
9.3.1 InquiryVitalProductdata.............................................45
9.3.2 ModeSensedata...................................................46
9.4 SCSIbus conditions and miscellaneous features supported . . . . . . . . . . ...............48
9.5 Synchronousdatatransfer ...................................................49
9.5.1 Synchronous data transfer periods supported.............................49
9.5.2 REQ/ACKoffset....................................................49
9.6 Physical interface ..........................................................49
9.6.1 DCcableandconnector .............................................49
9.6.2 SCSIinterfacephysicaldescription.....................................51
9.6.3 SCSIinterfacecablerequirements .....................................51
9.6.4 Mating connectors . . . . . . ............................................52
9.7 Electricaldescription........................................................60
9.7.1 Multimode—SEandLVDalternatives...................................60
9.8 Terminatorrequirements.....................................................62
9.9 Terminatorpower ..........................................................62
9.10 DiscdriveSCSItiming.......................................................63
9.11 DriveactivityLED ..........................................................64
10.0 Seagate Technology support services. . . ............................................65
Page 9

Barracuda 180 Product Manual, Rev. C vii
List of Figures
Figure 1. Barracuda 180 family drive (ST1181677LW shown) . . . . . . . . . . . . ....................1
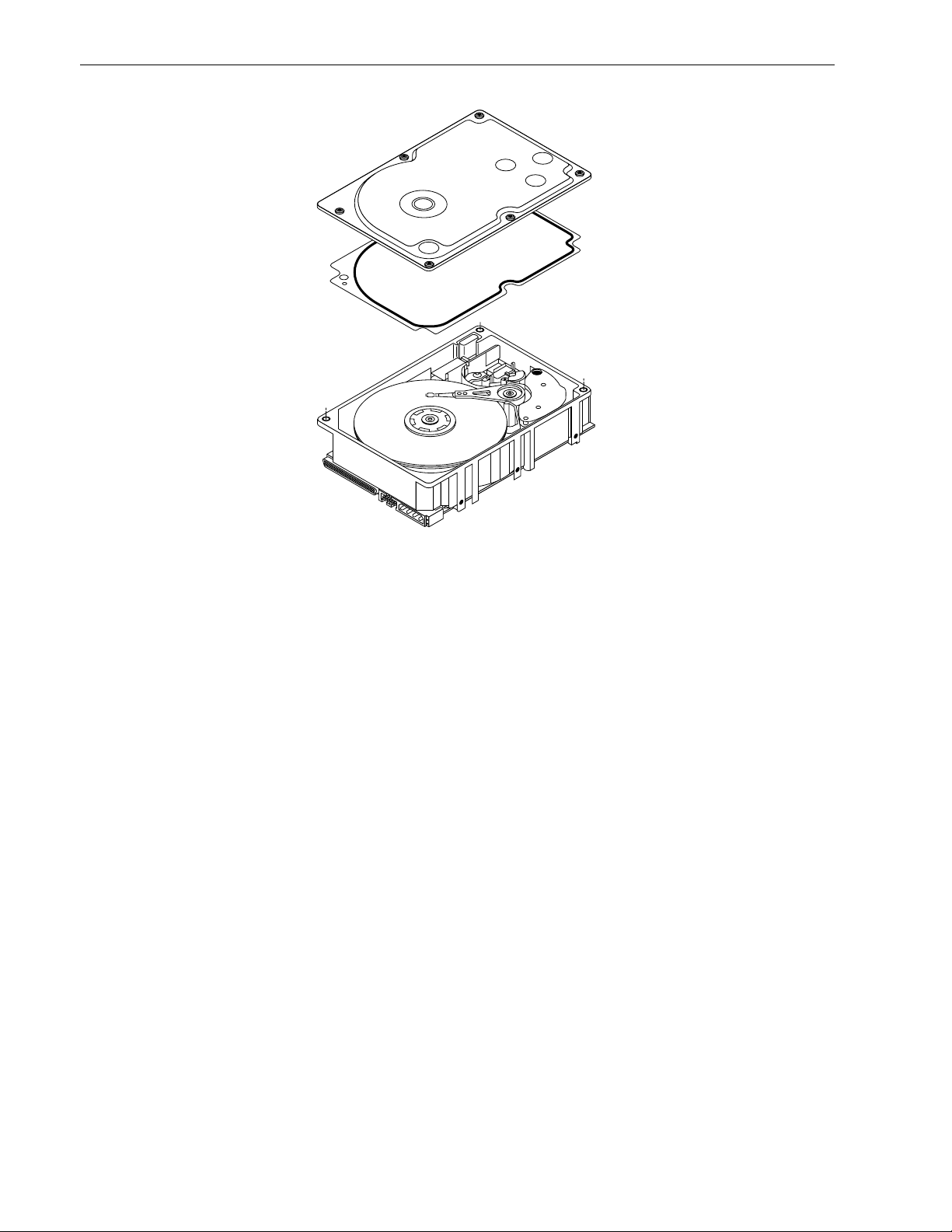
Figure2. Barracuda180familydrive....................................................6
Figure3. TypicalBarracuda180familydrive+12Vcurrentprofile............................22
Figure 4. Typical Barracuda 180 SCSI SE mode +5 V current profile. . . . . . . ...................23
Figure 5. Typical Barracuda 180 SCSI LVD mode +5 V current profile. . . . . . ...................23
Figure6. DCcurrentandpowervs.input/outputoperationspersecond(single-endedmode)......24
Figure7. DCcurrentandpowervs.input/outputoperationspersecond(LVDmode).............24
Figure8. LocationoftheHDAtemperaturecheckpoint....................................25
Figure9. Recommendedmounting....................................................27
Figure 10. ST1181677LW/LWV mounting configuration dimensions . . . . . . . . ...................29
Figure 11. ST1181677LC/LCV mounting configuration dimensions . . . . . . . . . ...................30
Figure12. J6jumperheader..........................................................34
Figure13. J5jumperheader(onLW/LWVmodelsonly).....................................35
Figure14. J2optionselectheader.....................................................36
Figure15. Suggestedairflow.........................................................38
Figure 16. ST1181677LW/LWV drive physical interface (68-pin J1 SCSI I/O connector). . . . . . ......50
Figure 17. ST1181677LC/LCV drive physical interface (80-pin J1 SCSI I/O connector) . . . . . . ......50
Figure 18. SCSI daisy chain interface cabling for LW/LWV drives . . . . . . . . . . ...................53
Figure19. Nonshielded68pinSCSIdeviceconnectorusedonLW/LWVdrives..................54
Figure 20. Nonshielded 80 pin SCSI “SCA-2” connector,usedonLC/LCVdrives.................55
Figure21. LVDoutputsignals.........................................................61
Figure22. TypicalSE-LVDalternativetransmitterreceivercircuits ............................61
Page 10

Page 11
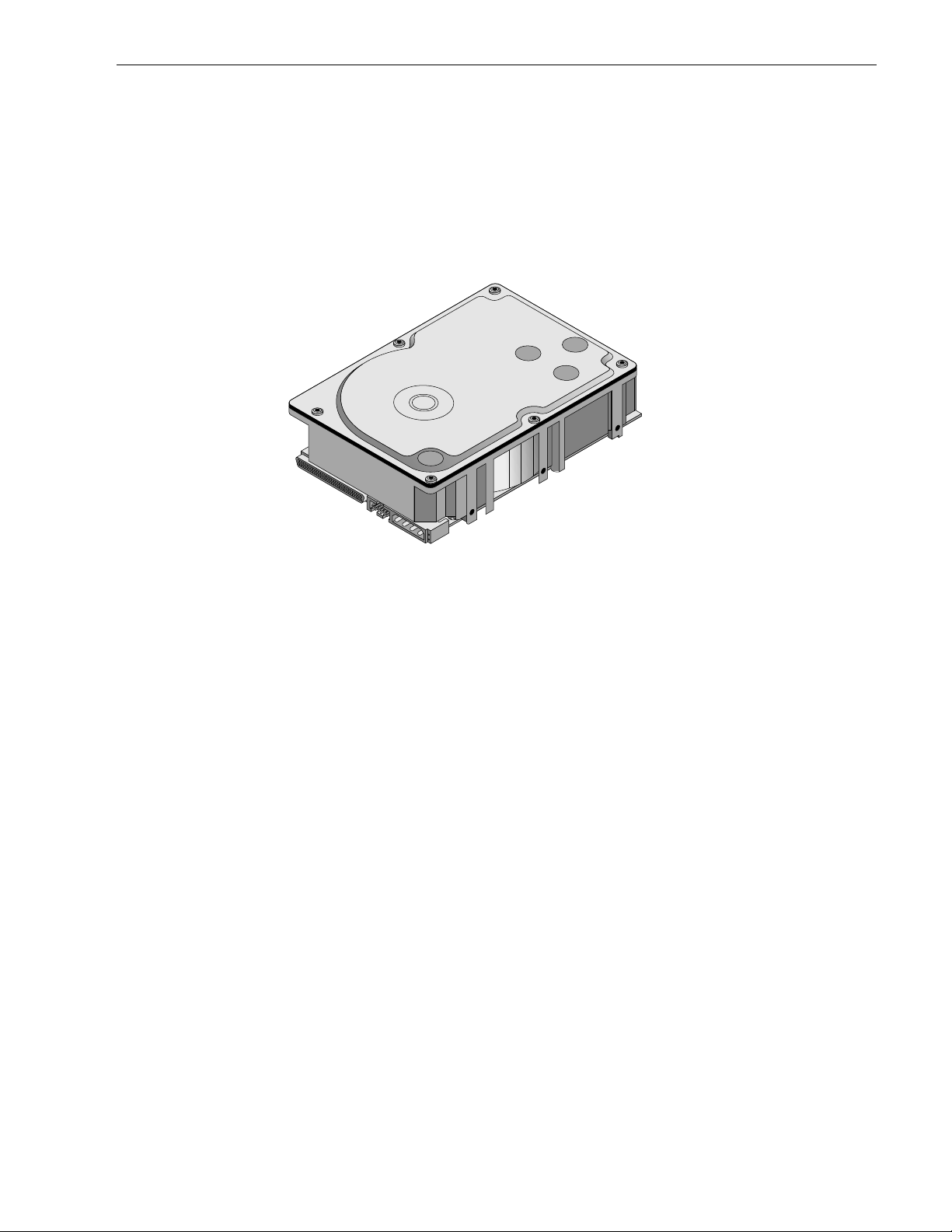
Barracuda 180 Product Manual, Rev. C 1
1.0 Scope
This manual describes Seagate Technology®LLC, Barracuda 180™ disc drives.
Barracuda 180 drives support the small computer system interface as described in the ANSI SCSI SPI-3 inter-
face specifications to the extent described in this manual. The
75789509) describes general SCSI interface characteristics of this and other families of Seagate drives.
From this point on in this product manual the reference to Barracuda 180 models is referred to as “the drive”
unless references to individual models are necessary.
SCSI Interface Product Manual
(part number
Figure 1. Barracuda 180 family drive (ST1181677LW shown)
Page 12

2 Barracuda 180 Product Manual, Rev. C
Page 13

Barracuda 180 Product Manual, Rev. C 3
2.0 Applicable standards and reference documentation
The drive has been developed as a system peripheral to the highest standards of design and construction. The
drive depends upon its host equipment to provide adequate power and environment in order to achieve optimum performance and compliance with applicable industry and governmental regulations. Special attention
must be given in the areas of safety, power distribution, shielding, audible noise control, and temperature regulation. In particular, the drive must be securely mounted in order to guarantee the specified performance characteristics. Mounting by bottom holes must meet the requirements of Section 8.4.
2.1 Standards
The Barracuda 180 family complies with Seagate standards as noted in the appropriate sections of this Manual
and the Seagate
The Barracuda 180 disc drive is a UL recognized component per UL1950, CSA certified to CSA C22.2 No.
950-M89, and VDE certified to VDE 0805 and EN60950.
2.1.1 Electromagnetic compatibility
The drive, as delivered, is designed for system integration and installation into a suitable enclosure prior to use.
As such the drive is supplied as a subassembly and is not subject to Subpart B of Part 15 of the FCC Rules
and Regulations nor the Radio Interference Regulations of the Canadian Department of Communications.
The design characteristics of the drive serve to minimize radiation when installed in an enclosure that provides
reasonable shielding. As such, the drive is capable of meeting the Class B limits of the FCC Rules and Regulations of the Canadian Department of Communications when properly packaged. However, it is the user’s
responsibility to assure that the drive meets the appropriate EMI requirements in their system. Shielded I/O
cables may be required if the enclosure does not provide adequate shielding. If the I/O cables are external to
the enclosure, shielded cables should be used, with the shields grounded to the enclosure and to the host controller.
SCSI Interface Product Manual
.
2.1.2 Electromagnetic susceptibility
As a component assembly, the drive is not required to meet any susceptibility performance requirements. It is
the responsibility of those integrating the drive within their systems to perform those tests required and design
their system to ensure that equipment operating in the same system as the drive or external to the system
does not adversely affect the performance of the drive. See Section 5.1.1 and Table 2, DC power requirements.
2.2 Electromagnetic compliance
Seagate uses an independent laboratory to confirm compliance to the directives/standard(s) for CE Marking
and C-Tick Marking. The drive was tested in a representative system for typical applications. The selected system represents the most popular characteristics for test platforms. The system configurations include:
• Typical current use microprocessors
• 3.5-inch floppy disc drive
• Keyboard
• Monitor/display
• Printer
• External modem
• Mouse
Although the test system with this Seagate model complies to the directives/standard(s), we cannot guarantee
that all systems will comply. The computer manufacturer or system integrator must confirm EMC compliance
and provide CE Marking and C-Tick Marking for their product.
Electromagnetic compliance for the European Union
If this model has the CE Marking it complies with the European Union requirements of the Electromagnetic
Compatibility Directive 89/336/EEC of 03 May 1989 as amended by Directive 92/31/EEC of 28 April 1992 and
Directive 93/68/EEC of 22 July 1993.
Page 14

4 Barracuda 180 Product Manual, Rev. C
Australian C-Tick
If this model has the C-Tick Marking it complies with the Australia/New Zealand Standard AS/NZS3548 1995
and meets the Electromagnetic Compatibility (EMC) Framew ork requirements of Australia’s Spectrum Management Agency (SMA).
Korean MIC
If this model has the MIC (Ministry of Information and Communication) Marking it complies with paragraph 1 of
Article 11 of the Electromagnetic Compatibility control Regulation and meets the Electromagnetic Compatibility
(EMC) Framework requirements of the Radio Research Laboratory Ministry of Information and Communication
Republic of Korea.
Taiwan MIC
If this model has two Chinese words meaning “EMC certification” followed by an eight digit identification number, as a Marking, it complies with Chinese National Standard (CNS) 13438 and meets the Electromagnetic
Compatibility (EMC) Framework requirements of the Taiwanese Bureau of Standards, Metrology, and Inspection (BSMI).
2.3 Reference documents
Barracuda 180 Installation Guide
Safety and Regulatory Agency Specifications
SCSI Interface Product Manual
ANSI small computer system interface (SCSI) document numbers:
T10/1143D Enhanced SCSI Parallel Interface (EPI)
T10/1236D Primary Commands-2 (SPC-2)
T10/996D SCSI Block Commands (SBC)
T10/1157D SCSI Architectural Model-2 (SAM-2)
T10/1302D SCSI Parallel Interface version 3 (SPI-3)
SFF-8451, Specification for SCA-2 Unshielded Connections
Package Test Specification Seagate P/N 30190-001 (under 100 lb.)
Package Test Specification Seagate P/N 30191-001 (over 100 lb.)
Specification, Acoustic Test Requirements, and Procedures Seagate P/N 30553-001
In case of conflict between this document and any referenced document, this document takes precedence.
Seagate P/N 100109942
Seagate P/N 75789512
Seagate P/N 75789509
Page 15
Barracuda 180 Product Manual, Rev. C 5
3.0 General description
Barracuda 180 drives combine giant magnetoresistive (GMR) heads, partial response/maximum likelihood
(PRML) read channel electronics, embedded servo technology, and a wide Ultra160 SCSI interface to provide
high performance, high capacity data storage for a variety of systems including engineering workstations, network servers, mainframes, and supercomputers.
The Ultra160 SCSI interface uses negotiated transfer rates. These transfer rates will occur only if your host
adapter supports these data transfer rates and is compatible with the required hardware requirements of the I/
O circuit type. This drive can also operate at SCSI-1 and SCSI-2 data transfer rates for backward compatibility
with non-Ultra/Ultra2/Ultra160 SCSI host adapters.
Table 1 lists the features that differentiate the various Barracuda 180 models.
Table 1: Drive model number vs. differentiating features
Number of I/O
Data buffer
Model number
size I/O circuit type [1]
ST1181677LW 4,096 kbytes Single-ended (SE) and low voltage differential (LVD) 68
ST1181677LWV 16,384 kbytes Single-ended (SE) and low voltage differential (L VD) 68
ST1181677LC 4,096 kbytes Single-ended (SE) and low voltage differential (LVD) 80
connector
pins
ST1181677LCV 16,384 kbytes Single-ended (SE) and low voltage differential (LVD) 80
[1] See Section 9.6 for details and definitions.
The drive records and recovers data on approximately 3.3-inch (84 mm) non-removable discs.
The drive supports the Small Computer System Interface (SCSI) as described in the ANSI SCSI-2/SCSI-3
interface specifications to the extent described in this manual (volume 1), which defines the product performance characteristics of the Barracuda 180 family of drives, and the
SCSI Interface Product Manual
,which
describes the general interface characteristics of this and other families of Seagate SCSI drives.
The drive’s interface supports multiple initiators, disconnect/reconnect, self-configuring host software, and
automatic features that relieve the host from the necessity of knowingthe physical characteristics of the targets
(logical block addressing is used).
The head and disc assembly (HDA) is sealed at the factory. Air circulates within the HDA through a nonreplaceable filter to maintain a contamination-free HDA environment.
Refer to Figure 2 for an exploded view of the drive. This exploded view is for information only—never disassemble the HDA and do not attempt to service items in the sealed enclosure (heads, media, actuator, etc.) as this
requires special facilities. The drive contains no replaceable parts. Opening the HDA voids your warranty.
Barracuda 180 drives use a dedicated landing zone at the innermost radius of the media to eliminate the possibility of destroying or degrading data by landing in the data zone. The drive automatically goes to the landing
zone when power is removed.
An automatic shipping lock prevents potential damage to the heads and discs that results from movement during shipping and handling. The shipping lock automatically disengages when power is applied to the drive and
the head load process begins.
Barracuda 180 drives decode track 0 location data from the servo data embedded on each surface to eliminate
mechanical transducer adjustments and related reliability concerns.
A high-performance actuator assembly with a low-inertia, balanced, patented, straight-arm design provides
excellent performance with minimal power dissipation.
Page 16
6 Barracuda 180 Product Manual, Rev. C
Figure 2. Barracuda 180 family drive
Page 17

Barracuda 180 Product Manual, Rev. C 7
3.1 Standard features
The Barracuda 180 family has the following standard features:
• Integrated Ultra160 SCSI controller
• Multimode SCSI drivers and receivers—single-ended (SE) and low voltage differential (LVD)
• 16 bit I/O data bus
• Asynchronous and synchronous data transfer protocol (supports Ultra160 transfer rate)
• Firmware downloadable via SCSI interface
• Selectable even byte sector sizes from 512 to 4,096 bytes/sector
• Programmable sector reallocation scheme
• Flawed sector reallocation at format time
• Programmable auto write and read reallocation
• Reallocation of defects on command (post format)
• EnhancedECC (maximumburst correctionslength of 240 bits with a guaranteed burst correction of 233 bits)
• Sealed head and disc assembly
• No preventative maintenance or adjustment required
• Dedicated head landing zone
• Embedded servo design
• Self diagnostics performed when power is applied to the drive
• Zoned bit recording (ZBR)
• Vertical, horizontal,or top down mounting
• Dynamic spindle brake
• 4,096 kbyte data buffer (16,384 kbytes on LWV and LCV models)
• Hot plug compatibility for LC and LCV model drives (Section 9.6.4.2 lists proper host connector needed)
• Supports SCSI bus fairness
3.2 Media characteristics
The media used on the drive has a diameter of approximately 3.3 inches (84 mm). The aluminum substrate is
coated with a thin film magnetic material, overcoated with a proprietary protective layer for improved durability
and environmental protection.
3.3 Performance
• Supports industry standard Ultra160 SCSI interface
• Programmable multi-segmentable cache buffer (see Section 3.1)
• 7,200 RPM spindle. Average latency = 4.17 ms
• Command queuing of up to 64 commands
• Background processing of queue
• Supports start and stop commands (spindle stops spinning)
3.4 Reliability
• 1,200,000 hour MTBF
• LSI circuitry
• Balanced low mass rotary voice coil actuator
• Incorporates industry-standard Self-Monitoring, Analysis and Reporting Technology (S.M.A.R.T.)
• Incorporates Drive Self Test (DST) technology
• 5-year warranty
Page 18

8 Barracuda 180 Product Manual, Rev. C
3.5 Unformatted and formatted capacities
Formatted capacity depends on the number of spare reallocation sectors reserved and the number of bytes per
sector. The following table shows the standard OEM model capacities:
Formatted
data block size
512 bytes/sector [1] Unformatted
ST1181677 1522c441h (181.6 GB) [2] 241.9 GB
Notes.
[1] Sector size selectable at format time. Users having the necessary equipment may modify the data block
size before issuing a format command and obtain different formatted capacities than those listed. See
Mode Select Command and Format Command in the
SCSI Interface Product Manual
.
[2] User available capacity depends on spare reallocation scheme selected, the number of data tracks per
sparing zone, and the number of alternate sectors (LBAs) per sparing zone.
3.6 Programmable drive capacity
Using the Mode Select command, you can change the drive’s capacity to something less than maximum. See
SCSI Interface Product Manual
the
. Refer to the Parameter list block descriptor number of blocks field. A value
of zero in the number of blocks field indicates that the drivewill not change the capacity it is currently formatted
to have. A number in the number of blocks field that is less than the maximum number of LBAs changes the
total drive capacity to the value in the block descriptor number of blocks field. A value greater than the maximum number of LBAs is rounded down to the maximum capacity.
3.7 Factory installed accessories
OEM standard drives are shipped with the
Safety and Regulatory Agency Specifications
Barracuda 180 Installation Guide
, part number 100109942 and the
, part number 75789512 (unless otherwise specified). A small
bag of jumper plugs used for the J2, J5, and J6 option select jumper headers are also included with the drive.
3.8 Options (factory installed)
All customer requested options are incorporated during production or packaged at the manufacturing facility
before shipping. Some of the options available are (not an exhaustive list of possible options):
• Other capacities can be ordered depending on sparing scheme and sector size requested.
• Single unit shipping pack. The drive is normally shipped in bulk packaging to provide maximum protection
against transit damage. Units shipped individually require additional protection as provided by the single unit
shipping pack. Users planning single unit distribution should specify this option.
• The
Barracuda 180 Installation Guide
, part number 100109942. This guide is usually included with each
standard OEM drive shipped, but you may order extra copies.
• The
Safety and Regulatory Agency Specifications
, part number 75789512, is usually included with each
standard OEM drive shipped, but you may order extra copies.
3.9 Accessories (user installed)
The followingaccessories are available. All accessories may be installed in the field.
• Single unit shipping pack.
Page 19

Barracuda 180 Product Manual, Rev. C 9
4.0 Performance characteristics
4.1 Internal drive characteristics (transparent to user)
ST1181677
Drive capacity 181.6 GBytes (formatted, rounded off values)
Read/write heads 24
Bytes/track 406,071 Bytes (average, rounded off values)
Bytes/surface 19,263 Mbytes (unformatted, rounded off values)
Tracks/surface (total) 24,247 Tracks (user accessible)
Tracks/inch 31,200 TPI
Peak bits/inch 490 KBPI
Internal data rate 282-508 Mbits/sec (variable with zone)
Disc rotational speed 7,200 r/min (+
Average rotational latency 4.17 msec
4.2 SCSI performance characteristics (visible to user)
The values given in Section 4.2.1 apply to all models of the Barracuda 180 family unless otherwise specified.
Refer to Section 9.10 and to the
SCSI Interface Product Manual
4.2.1 Access time [5]
Including controller overhead
(without disconnect) [1] [3]
Drive level Drive level
Read Write Read Write
msec msec
Av erage—Typical [2] 7.6 8.4 7.4 8.2
Single Track—Typical [2] 1.0 1.3 0.8 1.1
Full Stroke—Typical [2] 16.2 17.2 16.0 17.0
0.5%)
for additional timing details.
Not Including controller overhead
(without disconnect) [1] [3]
4.2.2 Format command execution time (minutes) [1]
ST1181677
Maximum (with verify) 210
Maximum (no verify) 120
4.2.3 Generalized performance characteristics
Minimum sector interleave 1 to 1
Data buffer transfer rate to/from disc media (one 512-byte sector):
Minimum [3]* 25.3 MByte/sec
Average [3] 36.1 MByte/sec
Maximum [3] 47.0 MByte/sec
SCSI interface data transfer rate (asynchronous):
Maximum instantaneous one byte wide 5.0 Mbytes/sec [4]
Maximum instantaneous two bytes wide 10.0 Mbytes/sec [4]
Synchronous formatted transfer rate Ultra2 SCSI Ultra160 SCSI
In low voltage differential (LVD) interface mode 5.0 to 80 Mbytes/sec 5.0 to 160 Mbytes/sec
Page 20

10 Barracuda 1 80 Product Manual, Rev. C
Sector Sizes:
Default 512 byte user data blocks
Variable 512 to 4,096 bytes per sector in even number of bytes per sector.
If n (number of bytes per sector) is odd, then n-1 will be used.
Read/write consecutive sectors on a track Yes
Flaw reallocation performance impact (for flaws reallocated at format time using
the spare sectors per sparing zone reallocation scheme.)
Average rotational latency 4.17 msec
Notes for Section 4.2.
[1] Execution time measured from receipt of the last byte of the Command Descriptor Block (CDB) to the
request for a Status Byte Transfer to the Initiator (excluding connect/disconnect).
[2] Typical access times are measured under nominal conditions of temperature, voltage, and horizontal ori-
entation as measured on a representative sample of drives.
[3] Assumes no errors and no sector has been relocated.
[4] Assumes system ability to support the rates listed and no cable loss.
[5] Access time = controller overhead + average seek time.
Access to data = controller overhead + average seek time + latency time.
4.3 Start/stop time
After DC power at nominal voltage has been applied, the drive becomes ready within 30 seconds if the Motor
Start Option is disabled (i.e. the motor starts as soon as the power has been applied). If a recoverable error
condition is detected during the start sequence, the drive executes a recovery procedure which may cause the
time to become ready to exceed 30 seconds. During spin up to ready time the drive responds to some commands over the SCSI interface in less than 1.5 seconds after application of power. Stop time is less than 30
seconds from removal of DC power.
If the Motor Start Option is enabled, the internal controller accepts the commands listed in the
Product Manual
been received the drive becomes ready for normal operations within 30 seconds typically (excluding an error
recovery procedure). The Motor Start Command can also be used to command the drive to stop the spindle
(see
SCSI Interface Product Manual
less than 1.5 seconds after DC power has been applied. After the Motor Start Command has
).
Negligible
SCSI Interface
There is no power control switch on the drive.
4.4 Prefetch/multi-segmented cache control
The drive provides prefetch (read look-ahead) and multi-segmented cache control algorithms that in many
cases can enhance system performance. “The term “cache” refers to the drive buffer storage space when it is
used in cache operations. To select prefetch and cache features, the host sends the Mode Select command
with the proper values in the applicable bytes in Mode Page 08h (see
and cache operations are independent features from the standpoint that each is enabled and disabled independently using the Mode Select command. However, in actual operation, the prefetch feature overlaps cache
operation somewhat as is noted in Section 4.5.1 and 4.5.2.
All default cache and prefetch Mode parameter values (Mode Page 08h) for standard OEM versions of this
drive family are provided in Table 7.
4.5 Cache operation
In general, 3,600 kbytes (14,399 kbytes of the 16,384 kbytes on LWV and LCV models) of the 4,096 kbytes of
physical buffer space in the drive can be used as storage space for cache operations. The buffer can be divided
into logical segments (Mode Select Page 08h, byte 13) from which data is read and to which data is written.
The drive supports a maximum of 64 cache segments and maintains a table of logical block disk medium
addresses of the data stored in each segment of thebuffer. If cache operation is enabled (RCD bit = 0 in Mode
Page 08h, byte 2, bit 0. See
mand is retrieved from the buffer (if it is there) before any disc access is initiated. If cache operation is not
SCSI Interface Product Manual
), data requested by the host with a Read com-
SCSI Interface Product Manual)
.Prefetch
Page 21

Barracuda 180 Product Manual, Rev. C 11
enabled, the buffer (still segmented with required number of segments) is still used, but only as circular buffer
segments during disc medium read operations (disregarding Prefetch operation for the moment). That is, the
drive does not check in the buffer segments for the requested read data, but goes directly to the medium to
retrieve it. The retrieved data merely passes through some buffer segment on the way to the host. On a cache
miss, all data transfers to the host are in accordance with buffer-full ratio rules. On a cache hit, the drive ignores
the buffer-full ratio rules. See explanations associated with Mode page 02h (disconnect/reconnect control) in
the
SCSI Interface Product Manual
The following is a simplified description of a read operation with cache operation enabled:
Case A - A Read command is received and the first logical block (LB) is already in cache:
1. Driv e transfers to the initiator the first LB requested plus all subsequent contiguous LBs that are already in
the cache. This data may be in multiple segments.
2. When the requested LB is reached that is not in any cache segment, the drivefetches it and any remaining
requested LBs from the disc and puts them in a segment of the cache. The drive transfers the remaining
requested LBs from the cache to the host in accordance with the disconnect/reconnect specification mentioned above.
3. If the prefetch feature is enabled, refer to Section 4.5.2 for operation from this point.
Case B - A Read command requests data, the first LB of which is not in any segment of the cache:
1. The drivefetches the requested LBs from the disc and transfers them into a segment, and from there to the
host in a ccordance with the disconnect/reconnect specification referred to in case A.
2. If the prefetch feature is enabled, refer to Section 4.5.2 for operation from this point.
.
Each buffer segment is a self-contained circular storage area (wrap-around occurs), the length of which is an
integer number of disc medium sectors. The wrap-around capability of the individual segments greatly
enhances the buffer’s overall performance as cache storage, allowing a wide range of user selectable configurations, including their use in the prefetch operation (if enabled) even when cache operation is disabled (see
Section4.5.2). The numberof segmentsis set dynamically by the drive and cannot be set by the host.The size
in kbytes of each segment is not reported by the Mode Sense command page 08h, bytes 14 and 15. The value
0XFFFF is always reported. If a size specification is sent by the host in a Mode Select command (bytes 14 and
15) no new segment size is set up by the drive, and if the STRICT bit in Mode page 00h (byte 2, bit 1) is set to
one, the drive responds as it does for any attempt to change unchangeable parameters (see
Product Manual
three segments.
4.5.1 Caching write data
Write caching is a write operation that uses the drive buffer storage area where the data to be written to the
medium is stored in one or more segments while the drive performs the write command.
If read caching is enabled (RCD=0), data written to the medium is retained in the cache for future read cache
hits. The same buffer space and segmentation is used as set up for read functions. The buffer segmentation
scheme is set up or changed independently, having nothing to do with the state of the RCD bit. When a write
command is issued, if RCD=0, the cache is first checked to see if any logical blocks that are to be written are
already stored in the cache from a previous read or write command. If there are, the respective cache segments are cleared. The new data is cached for subsequent Read commands.
If the number of write data logical blocks exceeds the size of the segment being written into, when the end of
the segment is reached, the data is written into the beginning of the same cache segment, overwriting the data
that was written there at the beginning of the operation. However, the drive does not overwrite data that has not
yet been written to the medium.
). The drive supports operation of any integer number of segments from 1 to 64. The default is
SCSI Interface
If write caching is enabled (WCE=1), the drive may return GOOD status on a write command after the data has
been transferred into the cache, but before the data has been written to the medium. If an error occurs while
writing the data to the medium, and GOOD status has already been returned, a deferred error will occur.
The Synchronize Cache command may be used to force the drive to write all cached write data to the medium.
Upon completion of a Synchronize Cache command, all data received from previous write commands will have
been written to the medium.
Page 22

12 Barracuda 1 80 Product Manual, Rev. C
Tables 7 show Mode default settings for the drives.
4.5.2 Prefetch operation
If the Prefetch feature is enabled, data in contiguous logical blocks on the disc immediately beyond that which
was requested by a Read command can be retrieved and stored in the buffer for immediate transfer from the
buffer to the host on subsequent Read commands that request those logical blocks (this is true even if cache
operation is disabled). Though the prefetch operation uses the buffer as a cache, finding the requested data in
the buffer is a prefetch hit, not a cache operation hit. Prefetch is enabled using Mode Select page 08h, byte 12,
bit 5 (Disable Read Ahead - DRA bit). DRA bit = 0 enables prefetch. Since data that is prefetched replaces data
already in some buffer segment(s), the host can limit the amount of prefetch data to optimize system performance. The max prefetch field (bytes 8 and 9) limits the amount of prefetch. The drive does not use the
Prefetch Ceiling field (bytes 10 and 11).
During a prefetch operation, the drive crosses a cylinder boundary to fetch more data only if the Discontinuity
(DISC) bit is set to one in bit 4 of byte 2 of Mode parameters page 08h.
Whenever prefetch (read look-ahead) is enabled (enabled by DRA = 0), it operates under the control of ARLA
(Adaptive Read Look-Ahead). If the host uses software interleave, ARLA enablesprefetch of contiguous blocks
from the disc when it senses that a prefetch hit will likely occur, even if two consecutive read operations were
not for physically contiguous blocks of data (e.g. “software interleave”). ARLA disables prefetch when it decides
that a prefetch hit will not likely occur. If the host is not using software interleave, and if two sequential read
operations are not for contiguous blocks of data, ARLA disables prefetch, but as long as sequential read operations request contiguous blocks of data, ARLA keeps prefetch enabled.
Page 23

Barracuda 180 Product Manual, Rev. C 13
5.0 Reliability specifications
The following reliability specifications assume correct host/drive operational interface, including all interface
timings, power supply voltages, environmental requirements and drive mounting constraints (see Section 8.4).
Seek Errors
Less than 10 in 10
Read Error Rates [1]
Recovered Data Less than 10 errors in 10
Unrecovered Data Less than 1 sector in 10
Miscorrected Data Less than 1 sector in 10
MTBF 1,200,000 hours
Service Life 5 years
Preventive Maintenance None required
Note.
[1] Error rate specified with automatic retries and data correction with ECC enabled and all flaws reallocated.
5.1 Error rates
The error rates stated in this specification assume the following:
• The drive is operated per this specification using DC power as defined in this manual (see Section 6.2).
• The drive has beenfo rmatted with the SCSI Format command.
• Errors caused by media defects or host system failures are excluded from error rate computations. Refer to
Section 3.2, “Media Characteristics.”
• Random data is used.
8
seeks
12
bits transferred (OEM defaultsettings)
15
bits transferred (OEM defaultsettings)
21
bits transferred
5.1.1 Environmental interference
When evaluating system operation under conditions of Electromagnetic Interference (EMI), the performance of
the drive within the system is considered acceptable if the drive does not generate an unrecoverable condition.
An unrecoverable error, or unrecoverable condition, is defined as one that:
• Is not detected and corrected by the drive itself;
• Is not capable of being detected from the error or fault status provided through the drive or SCSI interface; or
• Is not capable of being recovered by normal drive or system recovery p rocedures without operator interven-
tion.
5.1.2 Read errors
Before determination or measurement of read error rates:
• The data to be used for measurement of read error rates must be verified as being written correctly on the
media.
• All media defect induced errors must be excluded from error rate calculations.
5.1.3 Write errors
Write errors can occur as a result of media defects, environmental interference, or equipment malfunction.
Therefore, write errors are not predictable as a function of the number of bits passed.
If an unrecoverable write error occurs because of an equipment malfunction in the drive, the error is classified
as a failure affecting MTBF. Unrecoverable write errors are those which cannot be corrected within two
attempts at writing the record with a read verify after each attempt (excluding media defects).
5.1.4 Seek errors
A seek error is defined as a failure of the drive to position the heads to the addressed track. There shall be no
more than ten recoverable seek errors in 10
8
physical seek operations. After detecting an initial seek error, the
drive automatically performs an error recovery process. If the error recovery process fails, a seek positioning
error (15h) is reported with a Medium error (3h) or Hardware error (4h) reported in the Sense Key. This is an
Page 24

14 Barracuda 1 80 Product Manual, Rev. C
unrecoverable seek error. Unrecoverable seek errors are classified as failures for MTBF calculations. Refer to
the
SCSI Interface Product Manual
for Request Sense information.
5.2 Reliability and service
You can enhance the reliability of Barracuda180 disc drives by en suring that thedrive receives adequate cooling. Section 6.0 provides temperature measurements and other information that you can use to enhance the
service life of the drive. Section 8.3 provides recommended air-flow information.
5.2.1 Mean time between failure
The production disc drive achieves an MTBF of 1,200,000 hours when operated in an environment that
ensures the case temperatures specified in Section 6.4.1 are not exceeded. Short-term excursions up to the
specification limits of the operating environment will not affect MTBF performance. Continual or sustained
operation at case temperatures above the values specified in Section 6.4.1 may degrade product reliability.
The MTBF target is specified as device power-on hours (POH) for all drives in service per failure.
MTBF per measurement period =
Estimated power-on operating hours in the period
__
Number of drive failures in the period
Estimated power-on operation hours means power-up hours per disc drive times the total number of disc drives
in service. Each disc drive must have accumulated at least nine months of operation. Data is calculated on a
rolling average base for a minimum period of six months.
MTBF is based on the following assumptions:
• 8,760 power-on hours per year.
• 250 average on/off cycles per year.
• Operations at nominal voltages.
• Systems will provide adequate cooling to ensure the case temperatures specified in Section 6.4.1 are not
exceeded.
Drive failure means any stoppage or substandard performance caused by drive malfunction.
A S.M.A.R.T. predictive failure indicates that the drive is deteriorating to an imminent failure and is considered
an MTBF hit.
5.2.2 Field failure rate vs. time
The expected field failure rate is listed below. D rive utilization will vary. An estimated range of utilization is:
• 720 power-on hours (POH) per month.
• 250 on/off cycles per year.
• Read/seek/write operation 90% of power-on hours.
• Systems will provide adequate cooling to ensure the case temperatures specified in Section 6.4.1 are not
exceeded.
Month 1 2,500 PPM
Month 2 1,600 PPM
Month 3 1,200 PPM
Month 4 1,000 PPM
Month 5 890 PPM
Month 6 840 PPM
Month 7 805 PPM
Failure rate is calculated as follows:
• No system-induced failures are counted
• Based on 1,200,000 MTBF and 720 power-on hours per month
• Month 1’s rate includes a 300 PPM installation failure
Page 25

Barracuda 180 Product Manual, Rev. C 15
5.2.3 Preventive maintenance
No preventive maintenance is required.
5.2.4 Service life
The useful service life of the drive is five years. Depot repair or replacement of major parts is permitted during
the lifetime (see Section 5.2.5).
5.2.5 Service philosophy
Special equipment is required to repair the drive HDA. In order to achieve the above service life, repairs must
be performed only at a properly equipped and staffed service and repair facility. Troubleshooting and repair of
PCBs in the field is not recommended, because of the extensive diagnostic equipment required for effective
servicing. Also, there are no spare parts available for this drive. Drive warranty is voided if the HDA is opened.
5.2.6 Service tools
No special tools are required for site installation or recommendedfor site maintenance. Refer to Section 5.2.5.
The depot repair philosophy of the drive precludes the necessity for special tools. Field repair of the drive is not
practical since there are no user purchasable parts in the drive.
5.2.7 Hot plugging Barracuda 180 disc drives
The ANSI SPI-3 (T10/1302D) document defines the physical requirements for removal and insertion of SCSI
devices on the SCSI bus. Four cases are addressed. The cases are differentiated by the state of the SCSI bus
when the removal or insertion occurs.
Case 1 - All bus devices powered off during removal or insertion
Case 2 - RST signal asserted continuously during removal or insertion
Case 3 - Current I/O processes not allowed during insertion or removal
Case 4 - Current I/O process allowed during insertion or removal,except on the device being changed
Seagate Barracuda 180 disc drives support all four hot plugging cases. Provision should be made by the system such that a device being inserted makes power and ground connections prior to the connection of any
device signal contact to the bus. A device being removed should maintain power and ground connections after
the disconnection of any device signal contact from the bus (see T10/1302D SPI-3 Annex C).
It is the responsibility of the systems integrator to assure that no hazards from temperature, energy, voltage, or
ESD potential are presented during the hot connect/disconnect operation.
All I/O processes for the SCSI device being inserted or removed should be quiescent. All SCSI devices on the
bus should have receivers that conform to the SPI-3 standard.
If the device being hot plugged uses single-ended (SE) drivers and the bus is currently operating in low voltage
differential (LVD) mode, then all I/O processes for all devices on the bus must be completed, and the bus quiesced before attempting to hot plug the drive. Following the insertion of the newly installed device, the SCSI
host adapter must issue a Bus Reset, followed by a synchronous transfer negotiation. Failure to perform the
SCSI Bus Reset could result in erroneous bus operations.
The SCSI bus termination and termination power source must be external to the device being inserted or
removed.
End users should not mix devices with high voltage differential (HVD) drivers and receivers and devices with
SE, LVD, or multimode drivers and receivers on the same SCSI bus since the common mode voltages in the
HVD environment may not be controlled to safe levels for SE and L VD devices (see ANSI SPI-3).
The disc drive spindle must come to a complete stop prior to completely removing the drive from the cabinet
chassis. Use of the Stop Spindle command or partial withdrawal of the drive, enough to be disconnected from
the power source, prior to removal are methods for insuring that this requirement is met. During drive insertion,
care should be taken to avoid exceeding the limits stated in Section 6.4.4, “Shock and vibration” in this manual.
Page 26

16 Barracuda 1 80 Product Manual, Rev. C
5.2.8 S.M.A.R.T.
S.M.A.R.T. is an acronym for Self-Monitoring Analysis and Reporting Technology. This technology is intended
to recognize conditions that indicate a drive failure and is designed to provide sufficient warning of a failure to
allow data back-up before an actual failure occurs.
Note. The firmware will monitor specific attributes for degradation over time but cannot predict instantaneous
drive failures.
Each attribute has been selected to monitor a specific set of failure conditions in the operating performance of
the drive, and the thresholds are optimized to minimize “false” and “failed” predictions.
Controlling S.M.A.R.T.
The operating mode of S.M.A.R.T. is controlled by the DEXCPT bit and the PERF bit of the “Informational
Exceptions Control Mode Page” (1Ch). The DEXCPT bit is used to enable or disable the S.M.A.R.T. process.
Setting the DEXCPT bit will disable all S.M.A.R.T. functions. When enabled, S.M.A.R.T. will collect on-line data
as the drive performs normal read/write operations. When the PERF bit is set, the drive is considered to be in
“On-line Mode Only” and will not perform off-line functions.
The process of measuring off-line attributes andsaving data can be forced by the RezeroUnit command. Forcing S.M.A.R.T. will reset the timer so that the next scheduled interrupt will be two hours.
The drive can be interrogated by the host to determine the time remaining before the next scheduled measurement and data logging process will occur. This is accomplished by a log sense command to log page 0x3E.
The purpose is to allow the customer to control when S.M.A.R.T. interruptions occur. As described above, forcing S.M.A.R.T by the Rezero Unit command will reset the timer.
Performance impact
S.M.A.R.T. attribute data will be saved to the disc for the purpose of recreating the events that caused a predictive failure. The drive will measure and save parameters once every two hours subject to an idle period on the
SCSI bus. The process of measuring off-line attribute data and saving data to the disc is uninterruptable and
the maximum delay is summarized below:
Maximum processing delay
On-line only delay Fully enabled delay
DEXCPT = 0, PERF = 1 DEXCPT = 0, PERF = 0
S.M.A.R.T. delay times 50 milliseconds 300 milliseconds
Reporting control
Reporting is controlled in the Informational Exceptions Control Page (1Ch). Subject to the reporting method,
the firmware will issue a 01-5D00 sense code to the host. The error code is preserved through bus resets and
power cycles.
Determining rate
S.M.A.R.T. monitors the rate at which errors occur and signals a predictive failure if the rate of degraded error
rate increases to an unacceptable level. To determine rate, error events are logged and compared to the number of total operations for a given attribute. The interval defines the number of operations over which to measure the rate. The counter that keeps track of the current number of operations is referred to as the Interval
Counter.
S.M.A.R.T. measures error rate, hence for each attribute the occurrence of an error is recorded. A counter
keeps track of the number of errors for the current interval. This counter is referred to as the Failure Counter.
Error rate is simply the number of errors per operation. The algorithm that S.M.A.R.T. uses to record rates of
error is to set thresholds for the number of errors and the interval. If the number of errors exceeds the threshold
before the interval expires, then the error rate is considered to be unacceptable. If the number of errors does
not exceed the threshold before the interval expires, then the error rate is considered to be acceptable. In either
case,the interval and failure counters are reset and the process starts over.
Page 27

Barracuda 180 Product Manual, Rev. C 17
Predictive failures
S.M.A.R.T. signals predictive failures when the drive is performing unacceptably for a period of time. The firmware keeps a running count of the number of times the error rate for each attribute is unacceptable.To accomplish this, a counter is incremented whenever the error rate is unacceptable and decremented (not to exceed
zero) whenever the error rate is acceptable. Should the counter continually be incremented such that it reaches
the predictive threshold, a predictive failure is signaled. This counter is referred to as the Failure History
Counter. There is a separate Failure History Counter for each attribute.
5.2.9 Drive Self Test (DST)
Drive Self Test (DST) is a technology designed to recognize drive fault conditions that qualify the drive as a
failed unit. DST validates the functionality of the drive at a system level.
There are two test coverage options implemented in DST:
1. extended test
2. short test
The most thorough option is the extended test that performs various tests on the drive and scans every logical
block address (LBA) of the drive. The short test is time-restricted and limited in length—it does not scan the
entire media surface, but does some fundamental tests and scans portions of the media.
If DST encounters an error during either of these tests, it reports a fault condition. If the drive fails the test,
remove it from service and return it to Seagate for service.
5.2.9.1 DST Failure Definition
The drive will present a “diagnostic failed” condition through the self-tests results value of the diagnostic log
page if a functional failure is encountered during DST. The channel and servo parameters are not modified to
test the drive more stringently, and the number of retries are not reduced. All retries and recovery processes
are enabled during the test. If data is recoverable, no failure condition will be reported regardless of the number
of retries required to recover the data.
The following conditions are considered DST failure conditions:
• Seek error after retries are exhausted
• Track-follow error after retries are exhausted
• Read error after retries are exhausted
• Write error after retries are exhausted.
Recovered errors will not be reported as diagnostic failures.
5.2.9.2 Implementation
This section provides all of the informationnecessary to implement the DST function on this drive.
5.2.9.2.1 State of the drive prior to testing
The drive must be in a ready state before issuing the Send Diagnostic command. There are multiple reasons
why a drive may not be ready, some of which are valid conditions, and not errors. For example, a drive may be
in process of doing a format, or another DST. It is the responsibility of the host application to determine the “not
ready” cause.
While not technically part of DST, a Not Ready condition also qualifies the drive to be returned to Seagate as a
failed drive.
A Drive Not Ready condition is reported by the drive under the following conditions:
• Motor will not spin
• Motor will not lock to speed
• Servo will not lock on track
• Drive cannot read configuration tables from the disc
In these conditions, the drive responds to a Test Unit Ready command with an 02/04/00 or 02/04/03 code.
Page 28

18 Barracuda 1 80 Product Manual, Rev. C
5.2.9.2.2 Invoking DST
To invoke DST, submit the Send Diagnostic command with the appropriate Function Code (001b for the short
test or 010b for the extended test) in bytes 1, bits 5, 6, and 7. Refer to the Seagate
Manual
5.2.9.2.3 Short and extended tests
The short and extended test options are described in thefollowing two subsections.
Each test consists of three segments: an electrical test segment, a servo test segment, and a read/verify scan
segment.
Short test (Function Code: 001b)
The purpose of the short test is to provide a time-limited test that tests as much of the drive as possible within
120 seconds. The short test does not scan the entire media surface, but does some fundamental tests and
scans portions of the media. A complete read/verify scan is not performed and only factual failures will report a
fault condition. This option provides a quick confidence test of the drive.
Extended test (Function Code: 010b)
The objectiveof the extended test option is to empirically test critical drive components. For example, the seek
tests and on-track operations test the positioning mechanism. The read operation tests the read head element
and the media surface. The write element is tested through read/write/read operations. The integrity of the
media is checked through a read/verify scan of the media. Motor functionality is tested by default as a part of
these tests.
, Volume 2, part number 75789509 for additional information about invoking DST.
SCSI Interface Product
The anticipated length of the Extended test is reported through the Control Mode page.
5.2.9.2.4 Log page entries
When the drive begins DST, it creates a new entry in the Self-test Results Log page. The new entry is created
by inserting a new self-test parameter block at the beginning of the self-test results log parameter section of the
log page. Existing data will be moved to make room for the new parameter block. The drive reports 20 parameter blocks in the log page. If there are more than 20 parameter blocks, the least recent parameter block will be
deleted. The new parameter block will be initialized as follows:
1. The Function Code field is set to the same value as sent in the DST command
2. The Self-Test Results Value field is set to Fh
3. The drive will store the log page to non-volatile memory
After a self-test is complete or has been aborted, the drive updates the Self-Test Results Value field in its Self-
Test Results Log page in non-volatile memory. The host may use Log Sense to read the results from up to the
last 20 self-tests performed by the drive. The self-test results value is a 4-bit field that reports the results of the
test. If the field is zero, the drive passed with no errors detected by the DST. If the field is not zero, the test
failed for the reason reported in the field.
The drive will report the failure condition and LBA (if applicable) in the Self-test Results Log parameter. The
Sense key, ASC, ASCQ, and FRU are used to report the failure condition.
5.2.9.2.5 Abort
There are several ways to abort a diagnostic. You can use a SCSI Bus Reset or a Bus Device Reset message
to abort the diagnostic.
You can abort a DST executing in background mode by using the abort code in the DST Function Code field.
This will cause a 01 (self-test aborted by the application client) code to appear in the self-test results values
log. All other abort mechanisms will be reported as a 02 (self-test routine was interrupted by a reset condition).
5.2.10 Product warranty
Beginning on the date of shipment to customer and continuing for a period offive years, Seagate warrants that
each product (including components and subassemblies) or spare part that fails to function properly under normal use due to defect in materials on workmanship or due to nonconformance to the applicable specifications
Page 29

Barracuda 180 Product Manual, Rev. C 19
will be repaired or replaced, at Seagate’s option and at no charge to customer, if returned by customer at customer’s expense to Seagate’s designated facility in accordance with Seagate’s warranty procedure. Seagate
will pay for transporting the repair or replacement item to customer. For more detailed warranty information
refer to the Standard terms and conditions of Purchase for Seagate products.
Shipping
When transporting or shipping a drive, a Seagate approved container must be used. Keep your original box.
They are easily identified by the Seagate-approved package label. Shipping a drive in a non-approved container voids the drive warranty.
Seagate repair centers may refuse receipt of components improperly packaged or obviously damaged in transit. Contact your Authorized Seagate Distributor to purchase additional boxes. Seagate recommends shipping
by an air-ride carrier experienced in handling computer equipment.
Product repair and return information
Seagate customer service centers are the only facilities authorized to service Seagate drives. Seagate does
not sanction any third-party repair facilities. Any unauthorized repair or tampering with the factory-seal voids
the warranty.
Page 30

20 Barracuda 1 80 Product Manual, Rev. C
Page 31

Barracuda 180 Product Manual, Rev. C 21
6.0 Physical/electrical specifications
This section provides information relating to the drive’s physical and electrical characteristics.
6.1 AC power requirements
None.
6.2 DC power requirements
The voltage and current requirements for a single drive are shown in the following table.Values indicated apply
at the drive power connector. The table shows current values in Amperes.
Table 2: DC power requirements
ST1181677
Notes
SE mode LVD mode
Voltage +5V +12 V +5V +12 V
Regulation [5] ±5% ±5%[2] ±5% ±5%[2]
Aver age idle current DCX
[1] 0.69 0.53 0.76 0.53
Maximum starting current
(peak DC) DC
(peak AC) AC
[3]
[3]
0.77
0.89
1.34
2.17
0.87
1.01
1.34
2.17
Delayed motor start (max) DC [1][4] 0.62 0.03 0.68 0.03
Peak operating current
DCX
Maximum DC
Maximum (peak) DC
[1][6]
[1]
0.73
0.76
1.15
0.83
0.86
2.22
0.83
0.87
1.43
0.83
0.86
2.22
[1] Measured with average reading DC ammeter or equivalent sampling scope. Instantaneous current peaks
will exceed these values. Power supply at nominal voltage. N = 6, 22 Degrees C ambient.
[2] For +12 V, a –10% tolerance is permissible during initial start of spindle, and must return to ±5% before
7,200 rpm is reached. The ±5% must be maintained after the drive signifies that its power-up sequence
has been completed and that the drive is able to accept selection by the host initiator.
[3] See +12 V current profile in Figure 3.
[4] This condition occurs when the Motor Start Option is enabled and the drive has not yet received a Start
Motor command.
[5] See Section 6.2.1 “Conducted Noise Immunity.” Specified voltage tolerance is inclusive of ripple, noise,
and transient response.
[6] Operating condition is defined as random 8 block reads at 156 I/Os per second. Current and power speci-
fied at nominal voltages. Decreasing +5 volt supply by 5% increases 5 volt current by 2.9%. Decreasing
+12 volt supply by 5% increases +12 volt current by 2.4%.
[7] During idle, the drive heads are relocated every 60 seconds to a random location within the band from
track zero to one-fourth of maximum track.
General Notes from Table 2:
1. Minimum current loading for each supply voltage is not less than 1.8% of the maximum operating current
shown.
2. The +5 and +12 volt supplies shall employ separate ground returns.
3. Where power is provided to multiple drives from a common supp ly,careful consideration for individual drive
power requirements should be noted. Where multiple units are powered on simultaneously, the peak starting current must be available to each device.
4. Parameters, other than spindle start, are measured after a 10-minute warm up.
5. No terminator power.
Page 32

22 Barracuda 1 80 Product Manual, Rev. C
6.2.1 Conducted noise immunity
Noise is specified as a periodic and random distribution of frequencies covering a band from DC to 10 MHz.
Maximum allowed noise values given below are peak to peak measurements and apply at the drive power connector.
+5 V = 150 mV pp from 0 to 100 kHz and 100 mV pp from 100 kHz to 10 MHz
+12 V = 150 mV pp from 0 to 100 kHz and 100 mV pp from 100 kHz to 10 MHz
6.2.2 Power sequencing
The drive does not require power sequencing. The drive protects against inadvertent writing during power-up
and down. Daisy-chain operation requires that power be maintained on the SCSI bus terminator to ensure
proper termination of the peripheral I/O cables. To automatically delay motor start based on the target ID (SCSI
ID) enable the Delay Motor Start option and disable the Enable Motor Start option on the J2 connector. See
Section 8.1 for pin selection information. To delay the motor until the drive receives a Start Unit command,
enable the Enable Remote Motor Start option on the J2 connector.
6.2.3 12 V - Current profile
Figure 3 identifies the drive +12 V current profile. The current during the various times is as shown:
T0 - Power is applied to the drive.
T1 - Controller self tests are performed.
T2 - Spindle begins to accelerate under current limiting after performing drive internal
diagnostics. See Note 1 ofTable 2.
T3 - The spindle is up to speed and the head-arm restraint is unlocked.
T4 - The adaptive servo calibration sequence is performed.
T5 - Calibration is complete and drive is ready for reading and writing.
Note. All times and currents are typical. See Table 2 for maximum current requirements.
+12 Volt Current during spindle start – Typical Amperes
Peak AC Envelope
3.0
A
2.0
1.0
0.0
T0 T1 T3 T4
T2
Peak DC
0.02 4 6 8 10121416
Seconds
Figure 3. Typical Barracuda 180 family drive +12 V current profile
Page 33

Barracuda 180 Product Manual, Rev. C 23
+5 Volt Current during spindle start (single ended) – Typical Amperes
2.0
A
1.5
1.0
0.5
T1 T2 T4T0 T3 T5
0.0 4 8 12 16 20 24 28 32
Seconds
Figure 4. Typical Barracuda 180 SCSI SE mode +5 V current profile
+5 Volt Current during spindle start (LVD) – Typical Amperes
AC Component
Nominal (average) DC curve
2.0
A
1.5
1.0
0.5
T2T1T0 T3 T4 T5
0.0 4 8 12 16 20 24 28 32
Seconds
Figure 5. Typical Barracuda 180 SCSI LVD mode +5 V c urrent profile
AC Component
Nominal (average) DC curve
Page 34

24 Barracuda 1 80 Product Manual, Rev. C
6.3 Power dissipation
For drives using single-ended interface circuits, typical power dissipation under idle conditions is 9.95 watts
(33.98 BTUs per hour).
For drives using low voltage differential interface circuits, typical power dissipation under idle conditions is 10.3
watts (35.18 BTUs per hour).
To obtain operating powerfor typicalrandom read operations, refer to the following two I/O rate curves (see figures 6 and 7). Locate the typical I/O rate for a drive in your system on the horizontal axis and read the corresponding +5 volt current, +12 volts current, and total watts on the vertical axis. To calculate BTUs per hour,
multiply watts by 3.4123.
1.800
5V A
1.600
1.400
12V A
Watts
1.200
1.000
Amperes
0.800
0.600
0.400
0 50 100
I/Os per Second
Figure 6. DC current and power vs. input/output operations per second (single-ended mode)
1.800
1.600
1.400
1.200
150 200
17
15
Watts
13
11
17
5V A
12V A
Watts
1.000
Amperes
0.800
0.600
0.400
0 50 100
I/Os per Second
Figure 7. DC current and power vs. input/output operations per second (LVD mode)
150 200
15
Watts
13
11
Page 35

Barracuda 180 Product Manual, Rev. C 25
6.4 Environmental limits
Temperature and humidity values experienced by the drive must be such that condensation does not occur on
any drive part. Altitude and atmospheric pressure specifications are referenced to a standard day at 58.7°F
(14.8°C). Maximum wet bulb temperature is 82°F(28°C).
6.4.1 Temperature
a. Operating
With cooling designed to maintain the case temperature, the drive meets all specifications over a 41°Fto
122°F(5°Cto50°C) driveambient temperature range with a maximum temperature gradient of36°F(20°C)
per hour. The enclosure for the drive should be designed such that the temperatures are not exceeded. Air
flow may be needed to achieve these temperature values (see Section 8.3). Operation at temperatures
above these values may adversely affect the drives ability to meet specifications.
The MTBF specification for the drive is based on operating in an environment that ensures that the case
temperatures are not exceeded. Occasional excursions to drive ambient temperatures of 122°F(50°C) or
41°F(5°C) may occur without impact to specified MTBF. Air flow may be needed to achieve these tempera-
tures. Continual or sustained operation at case temperatures above these values may degrade MTBF. The
maximum allowable continuous or sustained HDA case temperature for the rated MTBF is 122°F(50°C).
To confirm that the required cooling for the HDA is provided, place the drive in its final mechanical configuration and perform random write/read operations. After the temperatures stabilize, measure the HDA case
temperature of the drive.
The maximum allowable HDA case temperature is 140°F(60°C). Operation of the drive at the maximum
case temperature is intended for short time periods only.Continuous operation at elevated temperatures will
reduce product reliability.
b. Non-operating
–40° to 158°F(–40° to 70°C) package ambient with a maximum gradient of 36°F(20°C) per hour. This
specification assumes that the drive is packaged in the shipping container designed by Seagate for use with
drive.
HDA Temp.
Check Point
Figure 8. Location of the HDA temperature check point
1.0"
.5"
6.4.2 Relative humidity
The values below assume that no condensation on the drive occurs.
a. Operating
5% to 95% non-condensing relative humidity with a maximum gradient of 10% per hour.
b. Non-operating
5% to 95% non-condensing relative humidity.
Page 36

26 Barracuda 1 80 Product Manual, Rev. C
6.4.3 Effective altitude (sea level)
a. Operating
–1,000 to +10,000 feet (–305 to +3,048 meters)
b. Non-operating
–1,000 to +40,000 feet (–305 to +12,210 meters)
6.4.4 Shock and vibration
Shock and vibration limits specified in this document are measured directly on the drive chassis. If the drive is
installed in an enclosure to which the stated shock and/or vibration criteria is applied, resonances may occur
internally to the enclosure resulting in drive movement in excess of the stated limits. If this situation is apparent,
it may be necessary to modify the enclosure to minimize drive movement.
The limits of shock and vibration defined within this document are specified with the drive mounted by any of
the four methods shown in Figure 9, and in accordance with the restrictions of Section 8.4. Orientation of the
side nearest the LED may be up or down.
6.4.4.1 Shock
a. Operating—normal
The drive, as installed for normal operation, shall operate error free while subjected to intermittent shock not
exceeding 10.0 Gs at a maximum duration of 11 msec (half sinewav e). The drive, as installed for normal
operation, shall operate error free while subjected to intermittent shock not exceeding 15.0 Gs at a maximum duration of 2 msec (half sinewave). Shock may be applied in the X, Y, or Z axis.
b. Operating—abnormal
Equipment, as installed for normal operation, does not incur physical damage while subjected to intermittent shock not exceeding 40 Gs at a maximum duration of 11 msec (half sinewave). Shock occurring at
abnormal levels may promote degraded operational performance during the abnormal shock period. Specified operational performance will continue when normal operating shock levels resume. Shock may be
applied in the X, Y, or Z axis. Shock is not to be repeated more than two times per second.
c. Non-operating
The limits of non-operating shock shall apply to all conditions of handling and transportation. This includes
both isolated drives and integrated drives.
The drive subjected to nonrepetitive shock not exceeding 75 Gs at a maximum duration of 11 msec (half
sinewave) shall not exhibit device damage or performance degradation. Shock may be applied in the X, Y,
or Z axis.
The typical drive subjected to nonrepetitive shock not exceeding 150 Gs typical at a maximum duration of 2
msec (half sinewave) does not exhibit device damage or performance degradation. Shock may be applied in
theX,Y,orZaxis.
The drive subjected to nonrepetitive shock not exceeding 80 Gs at a maximum duration of 0.5 msec (half
sinewave) does not exhibit device damage or performance degradation. Shock may be applied in the X, Y,
or Z axis.
d. Packaged
Disc drives shipped as loose load (not palletized) general freight will be packaged to withstand drops from
heights as defined in the table below. For additional details refer to Seagate specifications 30190-001
(under 100 lbs/45 kg) or 30191-001 (over 100 lbs/45 Kg).
Package size Packaged/product weight Drop height
<600cuin(<9,800cucm) Any 60in(1524mm)
600-1800 cu in (9,800-19,700 cu cm) 0-20 lb (0 to 9.1 kg) 48 in (1219 mm)
>1800 cu in (>19,700 cu cm) 0-20 lb (0 to 9.1 kg) 42 in (1067 mm)
>600 cu in (>9,800 cu cm) 20-40 lb (9.1 to 18.1 kg) 36 in (914 mm)
Page 37

Barracuda 180 Product Manual, Rev. C 27
Drives packaged in single or multipacks with a gross weight of 20 pounds (8.95 kg) or less by Seagate for
general freight shipment shall withstand a drop test from 48 inches (1,070 mm) against a concrete floor or
equivalent.
Z
Y
X
Figure 9. Recommended mounting
X
Z
Y
Page 38

28 Barracuda 1 80 Product Manual, Rev. C
6.4.4.2 Vibration
a. Operating - normal
The drive as installed for normal operation, shall comply with the complete specified performance while
subjected to continuous vibration not exceeding
5-400 Hz @ 0.5 G
Vibration may be applied in the X, Y, or Z axis.
Translational random flat profile:
10 - 400 Hz 0.4 GRMS
b. Operating - abnormal
Equipment as installed for normal operation shall not incur physical damage while subjected to periodic
vibration not exceeding:
15 minutes of duration at major resonant frequency
5-400 Hz @ 0.75 G (X, Y, or Z axis)
Vibration occurring at these levels may degrade operational performance during the abnormal vibration
period. Specified operational performance will continue when normal operating vibration levels are
resumed. This assumes system recovery routines are available.
Translational random flat profile:
10 - 400 Hz 1.2 GRMS
c. Non-operating
The limits of non-operating vibration shall apply to all conditions of handling and transportation. This
includes both isolated drives and integrated drives.
The drive shall not incur physical damage or degraded performance as a result of continuous vibration not
exceeding
20-400 Hz @ 2.00 G
Vibration may be applied in the X, Y, or Z axis.
Translational random flat profile:
10 - 400 Hz 1.2 GRMS
6.4.5 Air cleanliness
The drive is designed to operate in a typical office environment with minimal environmental control.
6.4.6 Acoustics
Sound power during idle mode shall be 3.7 bels typical when measured to ISO 7779 specification.
There will not be any discrete tones more than 10 dB above the masking noise on typical drives when mea-
sured according to Seagate specification 30553-001. There will not be any tones more than 24 dB above the
masking noise on any drive.
6.4.7 Electromagnetic susceptibility
See Section 2.1.2.
Page 39

Barracuda 180 Product Manual, Rev. C 29
6.5 Mechanical specifications
The following nominal dimensions are exclusive of the decorative front panel accessory. However, dimensions
of the front panel are shown in figure below. Refer to Figures 10 and 11 for detailed mounting configuration
dimensions. See Section 8.4, “Drive mounting.”
Height: 1.6 in 40.64 mm
Width: 4.000 in 101.6 mm
Depth: 5.75 in 146.05 mm
Weight: 2.3 pounds 1.043 kilograms
K
-Z-T//
S
HL
[1]
B
J
-Z-
R
A
-Z-
M
-X-
U
P
[1]
G
F
DE
C
Notes:
Mounting holes are 6-32 UNC 2B, three
[1]
on each side and four on the bottom.
Max screw penetration into side of drive
is 0.15 in. (3.81 mm). Max screw
tightening torque is 6.0 in-lb (3.32 nm)
with minimum full thread engagement of
0.12 in. (3.05 mm).
Dimension Table
Inches
A
1.654
5.787
4.000
3.750
.125
1.750
1.625
1.122
4.000
.250
1.638
.181
1.625
.265
.315
.015
.015
max
max
± .010
± .010
± .010
± .010
± .020
± .020
± .010
± .010
± .010
± .020
± .020
± .010
± .040
max
max
B
C
D
E
F
G
H
J
K
L
M
P
R
S
T
U
Millimeters
42.01
147.00
101.60
95.25
3.18
44.45
41.28
28.50
101.60
6.35
41.60
4.60
41.28
6.73
7.00
0.38
0.38
± .25
max
max
± .25
± .25
± .25
± .50
± .50
± .25
± .25
± .25
± .50
± .50
± .25
± .10
max
max
-X-
Figure 10. ST1181677LW/LWV mounting configuration dimensions
Page 40

30 Barracuda 1 80 Product Manual, Rev. C
K
-Z-T//
S
HL
[1]
B
J
-Z-
R
-Z- -X-N
A
-Z-
M
-X-
U
P
[1]
G
F
Notes:
Mounting holes are 6-32 UNC 2B, three
[1]
on each side and four on the bottom.
Max screw penetration into side of drive
is 0.15 in. (3.81 mm). Max screw
tightening torque is 6.0 in-lb (3.32 nm)
with minimum full thread engagement
of 0.12 in. (3.05 mm).
Dimension Table
Inches
A
1.654
5.787
4.000
3.750
.125
1.750
1.625
1.122
4.000
.250
1.638
.181
.040
1.625
2.618
.276
.015
.015
max
max
± .010
± .010
± .010
± .010
± .020
± .020
± .010
± .010
± .010
± .020
max
± .020
± .010
± .040
max
max
B
C
D
E
F
G
H
J
K
L
M
N
P
R
S
T
U
Millimeters
42.01
147.00
101.60
95.25
3.18
44.45
41.28
28.50
101.60
6.35
41.61
4.60
1.20
41.28
66.50
7.00
0.38
0.38
± .25
± .25
max
max
± .25
± .25
± .50
± .50
± .25
± .25
± .25
± .50
max
± .50
± .25
± 1.02
max
max
DE
C
-X-
Figure 11. ST1181677LC/LCV mounting configuration dimensions
Page 41

Barracuda 180 Product Manual, Rev. C 31
7.0 Defect and error management
The drive, as delivered, complies with this specification. The read error rate and specified storage capacity are
not dependent upon use of defect management routines by the host (initiator).
Defect and error management in the SCSI system involves the drive internal defect/error management and
SCSI systems error considerations (errors in communications between Initiator and the drive).Tools for use in
designing a defect/error management plan are briefly outlined in this section, with references to other sections
where further details are given.
7.1 Drive internal defects
During the initial drive format operation at the factory, media defects are identified, tagged as being unusable,
and their locations recorded on the drive primary defects list (referred to as the “P” listandalsoastheETF
defect list). At factory format time, these known defects are also reallocated, that is, reassigned to a new place
on the medium and the location listed in the defects reallocation table. The “P” list is not altered after factory
formatting. Locations of defects found and reallocated during error recovery procedures after drive shipment
arelistedinthe“G” list (defects growth list). The “P” and “G” lists may be referenced by the initiator using the
Read Defect Data command (refer to the
The time for the drive to process the Read Defect Data command is dependent on the number of “P” and “G”
list entries. The Read Defect Data command supports two reporting modes of processing the data.
The maximum time for the drive to process the internal defect data is summarized below:
Maximum command time
SCSI Interface Product Manual
).
Sector Format 1 minute
Bytes From Sector Format 3 minutes
7.2 Drive error recovery procedures
Whenever an error occurs during drive operation, the drive, if programmed to do so, performs error recovery
procedures to attempt to recover the data. The error recovery procedures used depend on the options previously set up in the error recovery parameters mode page. Error recovery and defect management may involve
the use of several SCSI commands, the details of which are described in the
The drive implements selectable error recovery time limits such as are required in video applications. For additional information on this, refer to the
Sense Error Recovery parameters.
The error recovery scheme supported by the drive provides a means to control the total error recovery time for
the entire command in addition to controlling the recovery level for a single LBA. The total amount of time spent
in error recovery for a command can be limited via the Recovery Time Limit bytes in the Error Recovery Mode
Page.The total amount of time spent in error recovery for a single LBA can be limited via the Read Retry Count
or Write Retry Count bytes in the Error Recovery Mode Page.
The drive firmware error recovery algorithms consist of 11 levels for read recoveriesand 5 levels for writes.
Table 3 equates the Read and Write Retry Count with the maximum possible recovery time for read and write
recovery of individual LBAs. The times given do not include time taken to perform reallocations, if reallocations
are performed. Reallocations are performed when the ARRE bit (for reads) or AWRE bit (for writes) is one, the
RC bit is zero, and the Recovery Time Limit for the command has not yet been met. Time needed to perform
reallocation is not counted against the Recovery Time Limit.
SCSI Interface Product Manual
which describes the Mode Select/Mode
SCSI Interface Product Manual.
The Read Continuous (RC) bit, when set to one, requests the disc drive to transfer the requested data length
without adding delays (for retries or ECC correction) that may be required to insure data integrity. The disc
drive may send erroneous data in order to maintain the continuous flow of data. The RC bit should only be
used when data integrity is not a concern and speed is of utmost importance. If the Recovery Time Limit or
retry count is reached during error recovery, the state of the RC bit is examined. If the RC bit is set, the drive
will transfer the unrecovered data with no error indication and continue to execute the remaining command. If
the RC bit is not set, the drive will stop data transfer with the last good LBA, and report a “Check Condition,
Unrecovered Read Error.”
Page 42

32 Barracuda 1 80 Product Manual, Rev. C
Table 3: Read and write retry count maximum recovery times [1]
Read retry
count [1]
0 58.03 0 24.18
1 74.61 1 36.27
2 373.05 2 40.3
3 406.21 3 52.39
4 472.42 4 128.96
5 538.74 5 (default) 157.17
6 704.56
7 746.03
8 754.3
9 804.04
10 895.66
11(default) 1,982.25
Maximumrecovery time per
LBA (cumulative, msec)
Write retry
count
Maximumrecovery time per
LBA (cumulative, msec)
[1] These values are subject to change.
Setting these retry counts to a value below the default setting could result in an increased unrecovered
error rate which may exceed the value given in this product manual. A setting of zero (0) will result in the
drive not performing error recovery.
For example, suppose the Read/Write Recovery page has the RC bit set to 0, read retry count set to 4,
and the recovery time limit field (Mode Sense page 01, bytes 10 and 11) set to FF FF hex (maximum). A
four LBA Read command is allowed to take up to 346 msec recovery time for each of the four LBAs in the
command. If the recovery time limit is set to 00 C8 hex (200 msec decimal) a four LBA read command is
allowed to take up to 200 msec for all error recovery within that command. The use of the Recovery Time
Limit field allows finer granularity on control of the time spent in error recovery. The recovery time limit only
starts counting when the drive is executing error recovery and it restarts on each command. Therefore,
each command’s total recovery time is subject to the recovery time limit. Note: A recovery time limit of 0
will use the drive’s default value of FF FF. Minimum recovery time limit is achieved by setting the Recovery
Time Limit field to 00 01.
7.3 SCSI systems errors
Information on the reporting of operational errors or faults across the interface is given in the
Product Manual
. Message Protocol System is described in the
SCSI Interface Product Manual
SCSI Interface
. Several of the
messages are used in the SCSI systems error management system. The Request Sense command returns
information to the host about numerous kinds of errors or faults. The Receive Diagnostic Results reports the
results of diagnostic operations performed by the drive.
Status returned by the drive to the Initiator is described in the
SCSI Interface Product Manual
. Status reporting
plays a role in the SCSI systems error management and its use in that respect is described in sections where
the various commands are discussed.
Page 43

Barracuda 180 Product Manual, Rev. C 33
8.0 Installation
Note. These drives are designed to be used only on single-ended (SE) or low voltage differential (LVD) bus-
ses. Do not install these drives on a high voltage differential (HVD) bus.
The first thing to do when installing a drive is to set the drive SCSI ID and set up certain operating options. This
is usually done by installing small shorting jumpers on the pins of connectors J2 and J6 on the PCBA (or J1Auxiliary on the LW/LWV models), or via the drive to host I/O signals on the LC/LCV models. Some users connect cables to J6 or J5-Auxiliary and perform the set-up using remote switches.
Configure drive options
For option jumper locations and definitions refer to Figures 12, 13, and 14. Drive default mode parameters are
not normally needed for installation. Refer to Section 9.3.2 for default mode parameters if they are needed.
• Ensure that the SCSI ID of the drive is not the same as the host adapter. Most host adapters use SCSI ID 7
because ID 7 is the highest priority on both 8 and 16 bit data buses.
• If multiple devices are on the bus set the drive SCSI ID to one that is not presently used by other devices on
the bus.
• If the drive is the only device on the bus, attach it to the end of the SCSI bus cable. The user, system integrator, or host equipment manufacturer must provide external terminators.
Note. For additional information about terminator requirements, refer to Sections 9.8 and 9.9.
• Set all appropriate option jumpers for desired operation prior to power on. If jumpers are changed after
power has been applied, recycle the drive power to make the new settings effective.
• Installation instructions are provided by host system documentation or with any additionally purchased drive
installation software. If necessary see Section 10 for Seagate support services telephone numbers.
• Do not remove the manufacturer’s installed labels from the drive and do not cover with additional labels, as
the manufacturer labels contain information required when servicing the product.
Formatting
• It is not necessary to low level format this drive. The drive is shipped from the factory low level formatted in
512 byte sectors.
• Reformat the drive if a different spare sector allocation scheme is selected.
• High level formatting the drive involves assigning one or more partitions or logical drives to the drive volume.
Follow the instructions in the system manuals for the system into which the drive is to be installed.
8.1 Drive ID/option select header
Figures 12 and 13 show views of the drive ID select jumper connectors. Figure 14 shows the option select
jumper connector for all models. Figure 12 shows the drive’s J5-auxiliary jumper connector. Both J5-auxiliary
and J6 have pins for selecting drive ID and for connecting the remote LED cable. Only one or the other should
be used, although using both at the same time would not damage the drive. The notes following the figures
describe the functions of the various jumper positions on the connectors J2, J5-Auxiliary and J6. Suggested
part number for the jumpers used on J2 is Molex 52747-0211 (Seagate part number 77679052). A bag with
jumper plugs is shipped with the standard OEM drives.
Page 44

34 Barracuda 1 80 Product Manual, Rev. C
Drive
Front
Jumper Plug
(enlarged to
show detail)
Pin 1
[1]
J6
R
Reserved
L
E
E
A2A1A
A
3
S
D
0
SCSI ID = 0 (default)
SCSI ID = 1
SCSI ID = 2
SCSI ID = 3
SCSI ID = 4
SCSI ID = 5
SCSI ID = 6
SCSI ID = 7
[4]
SCSI ID = 8
SCSI ID = 9
SCSI ID = 10
SCSI ID = 11
SCSI ID = 12
SCSI ID = 13
SCSI ID = 14
SCSI ID = 15
Shipped with cover installed.
Host
[4]
Alternate
Usage Plug:
+5V
[6]
Reserved
Pins
11 9 7 5 3 1
6842
Ground
Do not install jumpers;
retain cover.
Dashed area is optional host circuitry (external to the drive)
[4]
connected to host supplied optional usage plug.
Do not connect anything to pins 13-20.
Figure 12. J6 jumper header
Drive Activity LED
Page 45

Barracuda 180 Product Manual, Rev. C 35
Drive HDA (rear view, PCB facing downward)
J5
[1] [2]
1P2P3P4P
J1-DC Power
For ID selection use
jumpers as shown or
connect a cable for
remote switching as
shown below.
Pins 1, 3, 5, and 7 are
optional connections to
switching circuits in host
equipment to establish
drive ID.
3
Remote Switches
Pins 2, 4, 6, and 8 are
normally not grounded.
They are driven low (ground)
for 250 ms after a Reset
or PWR ON to allow drive to
read SCSI ID selected.
PCB
68 Pin
SCSI I/O Connector
J1
Pin 1
+5V Ground
Pin 1
[2]
SCSI ID = 0 (default)
SCSI ID = 1
SCSI ID = 2
SCSI ID = 3
SCSI ID = 4
SCSI ID = 5
SCSI ID = 6
SCSI ID = 7
SCSI ID = 8
SCSI ID = 9
SCSI ID = 10
SCSI ID = 11
SCSI ID = 12
SCSI ID = 13
SCSI ID = 14
SCSI ID = 15
A3A2A
A
1
Reserved
Host
Alternate
Usage Plug
+5V
[4]
Dashed area is optional host circuitry (external to the
drive) connected to host supplied optional usage plug.
N.C.
[4]
+5V
N.C.
Ground
Drive Activity LED
1197531
12 10 8 6 4 2
0
A0A1A2A
Figure 13. J5 jumper header (on LW/LWV models only)
Page 46

36 Barracuda 1 80 Product Manual, Rev. C
Force single-ended bus mode
*
Additional notes on these
functions in section 8.1.2.
J2
Jumper Plug
(enlarged to
show detail)
Figure 14. J2 option select header
Jumper
Positions
Delay Motor Start
Enable Remote Motor Start
Write Protect
Parity Disable
Reserved
Term. Power to SCSI Bus
J6
Drive
Front
SEDSMEWPP
J2
J2
Pin 1
R
R
E
EST
D
S
P
[3]
(applies to “LW/LWV” models only;
reserved on “LC/LCV” models)
8.1.1 Notes for Figures 12, 13, and 14.
[1] Notes explaining the functions of the various jumpers on jumper header connectors J2, J5, and J6 are
given here and in Section 8.1.2. The term “default” means as standard OEM units are configured with a
jumper on those positions when shipped from factory. “Off” means no jumper is installed; “On” means a
jumper is installed. OFF or ON underlined is factory default condition.
The PCBA on LC/LCV models does not have connector J5. The J5 connector signals conform to
SFF-8009 Revision 2.0, Unitized Connector for Cabled Drives, signal assignments for auxiliary connec-
tors.
[2] These signals are also on 80-pin J1 I/O connector. See Tables 14 and 15.
[3] Voltage supplied by the drive.
Page 47

Barracuda 180 Product Manual, Rev. C 37
8.1.2 Function description
J2
jumper
installation Jumper function description
SE
On Forces drive to use single-ended I/O drivers/receivers only.
Off Drive can operate on the interface in low voltagedifferential mode or single-ended, depend-
ing on the voltage state of the I/O “DIFFSNS” line. Default is SE jumper not installed.
DS ME
Off
Off Spindle starts immediately after power up - Default setting.
Off On Drive spindle does not start until Start Unit command received from host.
On Off Spindle Startup is delayed by SCSI ID times 12 seconds after power is applied, i.e., drive 0
spindle starts immediately when DC power connected, drive 1 starts after 12 second delay,
drive 2 starts after 24 second delay, etc.
On On Drive spindle starts when Start Unit command received from host. Delayed start feature is
overridden and does not apply when ME jumper is installed.
WP
On Entire drive is w rite protected.
Off
Drive is not write protected. Default is WP jumper not installed.
PD
On Parity checking and parity error reporting by the drive is disabled.
Off
Drive checks for parity and reports result of parity checking to host.
Default is PD jumper not installed.
RES
Off
Reserved jumper position. Default is no RES jumper installed.
TP1 (Does not apply to the LC/LCV models)
Off The drive does not supply terminator power to external terminators or to the SCSI bus I/O
cable.
On Drive supplies power to SCSI bus I/O cable. When drives have differential I/O circuits, a
jumper on the TP1 position may be needed to power external terminators (see system documentation). These drives do not have terminator circuits on the drive.
Page 48

38 Barracuda 1 80 Product Manual, Rev. C
8.2 Drive orientation
The balanced rotary arm actuator design of the driveallows it to be mounted in any orientation. All drive performance characterization, however, has been done with the drive in horizontal (discs level) and vertical (drive on
its side) orientations, and these are the two preferred mounting orientations.
8.3 Cooling
Cabinet cooling must be designed by the customer so that the ambient temperature immediately surrounding
the drive will not exceed temperature conditions specified in Section 6.4.1, “Temperature.”
The rack, cabinet, or drawer environment for the drive must provide heat removal from the electronics and
head and disc assembly (HDA). You should confirm that adequate heat removal is provided using the temperature measurement guidelines described in Section 6.4.1.
Forced air flow may be required to keep temperatures at or below the temperatures specified in Section 6.4.1 in
which case the drive should be oriented, or air flow directed, so that the least amount of air flow resistance is
created while providing air flow to the electronics and HDA. Also, the shortest possible path between the air
inlet and exit should be chosen to minimize the travel length of air heated by the drive and other heat sources
within the rack, cabinet, or drawer environment.
If forced air is determined to be necessary, possible air-flow patterns are shown in Figure 15. The air-flow patterns are created by one or more fans, either forcing or drawing air as shown in the illustrations. Conduction,
convection, or other forced air-flow patterns are acceptable as long as the temperature measurement guidelines of Section 6.4.1 are met.
Note. Air flows in the direction shown (back to front)
Figure 15. Suggested air flow
or in reverse direction (front to back)
Note. Air flows in the direction shown or
in reverse direction (side to side)
Above unit
Under unit
Above unit
Under unit
Page 49

Barracuda 180 Product Manual, Rev. C 39
8.4 Drive mounting
When mounting the drive using the bottom holes (x-y plane in Figure 9) care must be taken to ensure that the
drive is not physically distorted due to a stiff non-flat mounting surface. The allowable mounting surface stiffness is 80 lb/in (14.0 N/mm). The following equation and paragraph define the allowable mounting surface stiffness:
k*x=F<15lb = 67N
where ‘k’ represents the mounting surface stiffness (units of lb/in or N/mm), and ‘x’ represents the out-of-plane
mounting surface distortion (units of inches or millimeters). The out-of-plane distortion (‘x’) is determined by
defining a plane with three of the four mounting points fixed and evaluating the out-of-plane deflection of the
fourth mounting point when a known force (F) is applied to the fourth point.
Note. Before mounting the drive in any kind of 3.5-inch to 5.25-inch adapter frame, verify with SeagateTech-
nology that the drive can meet the shock and vibration specifications given herein while mounted in
such an adapter frame. Adapter frames that are available may not have a mechanical structure capable of mounting the drive so that it can meet the shock and vibration specifications listed in this manual.
8.5 Grounding
Signal ground (PCBA) and HDA ground are connected together in the drive and cannot be separated by the
user. The equipment in which the drive is mounted is connected directly to the HDA and PCBA with no electrically isolating shock mounts. If it is desired for the system chassis to not be connected to the HDA/PCBA
ground, the systems integrator or user must provide a nonconductive (electrically isolating) method of mountingthedriveinthehostequipment.
Increased radiated emissions may result if you do not provide the maximum surface area ground connection
between system ground and drive ground. This is the system designer’s and integrator’s responsibility.
Page 50

40 Barracuda 1 80 Product Manual, Rev. C
Page 51

Barracuda 180 Product Manual, Rev. C 41
9.0 Interface requirements
This section partially describes the interface requirements as implemented on the drives.
9.1 General description
This section describes in essentially general terms the interface requirements supported by the Barracuda
180. No attempt is made to describe all of the minute details of conditions and constraints that must be considered by designers when designing a system in which this family of drives can properly operate. Seagate
declares that the drives operate in accordance with the appropriate ANSI Standards referenced in various
places herein, with exceptions as noted herein or in the Seagate
75789509.
9.2 SCSI interface messages supported
Table 4 lists the messages supported by the SCSI-2 and SCSI-3 modes of the Barracuda 180 family drives.
Table 4: SCSI messages supported by Barracuda 180 family drives
Message name Message code
Abort 06h Y
Abort-tag 0Dh Y
Bus device reset 0Ch Y
Clear ACA 16h N
Clear queue 0Eh Y
Command complete 00h Y
ContinueI/O process 12h Y
Disconnect 04h Y
Extended messages 01h [1] Y
Identify 80h-FFh Y
Ignore wide residue (two bytes) 23h Y
Initiate recovery 0Fh N
Initiator detected error 05h Y
Linked command complete 0Ah Y
Linked command complete with flag 0Bh Y
Message parity error 09h Y
Message reject 07h Y
Modify data pointer [1] N
No operation 08h Y
Parallel Protocol Request [1] [2] Y
Queue tag messages (two bytes)
ACA 24h N
Head of queue tag 21h Y
Ordered queue tag 22h Y
Simple queue tag 20h Y
Release recovery 10h N
Restore pointers 03h Y
Save data pointer 02h Y
Synchronous data transfer req. [1] Y
Target transfer disable 13h Y
Terminate I/O process 11h Y
Wide data transfer request [1] Y
Notes.
[1] Extended messages (see the
SCSI Interface Product Manual
SCSI Interface Product Manual
Supported by
SCSI-2/3
).
, part number
Page 52

42 Barracuda 1 80 Product Manual, Rev. C
9.3 SCSI interface commands supported
Table 5 following lists the SCSI interface commands that are supported by the drive. OEM standard drives are
shipped set to operate in Ultra160 mode.
Table 5: Commands supported by Barracuda 180 family drive
Command name
Command
code
Supported by
SCSI-2/3
Change definition 40h N
Compare 39h N
Copy 18h N
Copy and verify 3Ah N
Format unit [1] 04h Y
DPRY bit supported N
DCRT bit supported Y
STPF bit supported Y
IP bit supported Y
DSP bit supported Y
IMMED bit supported Y
VS (vendor specific) N
Inquiry 12h Y
Date code page (C1h) Y
Firmware numbers page (C0h) Y
Implemented operating def page (81h) Y
Jumper settings page (C2h) Y
Supported Vital product data page (00h) Y
Unit serial number page (80h) Y
Lock-unlock cache 36h N
Log select 4Ch Y
PCR bit Y
DU bit N
DS bit Y
TSD bit Y
ETC bit N
TMC bit N
LP bit N
Log sense 4Dh Y
Application client log page (0Fh) Y
Cache statistics page (37h) Y
Non-medium error page (06h) Y
Pages supported list(00h) Y
Read error counter page (03h) Y
Self-test results page (10h) Y
Start-stop cycle counter page (0Eh) Y
Temperature page (0Dh) Y
Verify error counter page (05h) Y
Write error counter page (02h) Y
Factory log page (3Eh) Y
Mode select (same pages as Mode Sense 1Ah) 15h Y [2]
Mode select (10) (same pages as Mode Sense 1Ah) 55h Y
Mode sense 1Ah Y[2]
Caching parameters page (08h) Y
Page 53

Barracuda 180 Product Manual, Rev. C 43
Table 5: Commands supported by Barracuda 180 family drive (Continued)
Command
Command name
code
Control mode page (0Ah) Y
Disconnect/reconnect (02h) Y
Error recovery page (01h) Y
Format page (03h) Y
Information exceptions control page (1Ch) Y
Notch and Partition Page (0Ch) N
Power condition page (1Ah) Y
Rigid disc drive geometry page (04h) Y
Unit attention page (00h) Y
Verify error recovery page (07h) Y
Xor Control page (10h) N
Mode sense (10) (same pages as Mode Sense 1Ah) 5Ah Y
Persistent Reserve In 5Eh Y
Persistent Reserve Out 5Fh Y
Prefetch 34h N
Read 08h Y
Read buffer (modes 0, 2, 3 supported) 3Ch Y
Read capacity 25h Y
Read defect data (10) 37h Y
Read defect data (12) B7h Y
Read extended 28h Y
DPO bit supported Y
FUA bit supported Y
Read long 3Eh Y
Reassign blocks 07h Y
Receive diagnostic results 1Ch Y
Supported diagnostics pages (00h) Y
Translate page (40h) Y
Release 17h Y
Release (10) 57h Y
Request sense 03h Y
Actual retry count bytes Y
Extended sense Y
Field pointer bytes Y
Reserve 16h Y
3rd par ty reserve Y
Extent reservation N
Reserve (10) 56h Y
3rd part reserve Y
Extent reservation N
Rezero unit 01h Y
Search data equal 31h N
Search data high 30h N
Search data low 32h N
Seek 0Bh Y
Seek extended 2Bh Y
Send diagnostics 1Dh Y
Supported by
SCSI-2/3
Page 54

44 Barracuda 1 80 Product Manual, Rev. C
Table 5: Commands supported by Barracuda 180 family drive (Continued)
Command
Command name
code
Supported diagnostics pages (00h) Y
Translate page (40h) Y
Set limits 33h N
Start unit/stop unit (spindle ceases rotating) (1Ch) 1Bh Y
Synchronize cache 35h Y
Test unit ready 00h Y
Verify 2Fh Y
BYTCHK bit Y
Write 0Ah Y
Write and verify 2Eh Y
DPO bit Y
Write buffer (modes 0, 2, supported) 3Bh Y
Firmware download option (modes 5, 7 supported) [3] Y
Write extended 2Ah Y
DPO bit Y
FUA bit Y
Write long 3Fh Y
Write same 41h Y
PBdata N
LBdata N
XDRead 52h N
XDWrite 50h N
XPWrite 51h N
Supported by
SCSI-2/3
[1] The drive can format to any even number of bytes per sector from 512 to 4,096.
[2] Tables 7 show how individual bits are set and which are changeable by the host.
[3] WARNING: A power loss during flash programming can result in firmware corruption. This usually makes
the drive inoperable.
Page 55

Barracuda 180 Product Manual, Rev. C 45
Table 6 lists the Standard Inquiry command data that the drive should return to the initiator per the format given
in the
SCSI Interface Product Manual.
Table 6: Barracuda 180 family drive Standard Inquiry data
Bytes Data (HEX)
0-15 00 00 031[12]28B 00 01 3E 53 45 41 47 41 54 45 20 VENDOR ID
16-31 53 54 [31] [31] [38] [31] [36] [37] [37] [4C] [57] [20]320 20 20 20 PRODUCT ID
32-47 R# R# R# R# S# S# S# S# S# S# S# S# 00 00 00 00
48-63 000000 0000000000 00000000 00000000
64-79 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
80-95 000000 0000000000 00000000 00000000
96-111 00 43 6F 70 79 72 69 67 68 74 20 28 63 29 20 [32] COPYRIGHT
5
112-127 [30] [30] [30]
128-143 72 69 67 68 74 73 20 72 65 73 65 72 76 65 64 20
20 53 65 61 67 61 74 65 20 41 6C 6C 20 NOTICE
[]103 means SCSI-3 (Ultra160) implemented.
2
[]
The drive can be changed between these two configurations:
02 means response data in SCSI-2/SCSI-3 format.
12 means the drive uses the hierarchical addressing mode to assign LUNs to logical units (default is 12).
R# Four ASCII digits representing the last four digits of the product Firmware Release number. This informa-
tion is also given in the Vital Product Data page C0h, together with servo RAM and ROM release numbers.
S# Eight ASCII digits representing the eight digits of the product serial number.
3
[]
Bytes 18 through 27 reflect model of drive. Shown here are hex values for Model ST1181677LW.
For LWV models, bytes 25-27 are 4C 57 56
For LC models, bytes 25 -27 are 4C 43 20
For LCV models, bytes 25-27 are 4C 43 56
5
[]
Copyright Year - changes with actual year.
9.3.1 Inquiry Vital Product data
Instead of the standard Inquiry data shown in Table 6, the initiator can request several Vital Product Data
pages by setting the Inquiry command EVPD bit to one. The
SCSI Interface Product Manual
lists the Vital
Product Data pages and describes their formats. A separate Inquiry command must be sent to the drive for
each Vital Product Data page the initiator wants the drive to send back.
Page 56

46 Barracuda 1 80 Product Manual, Rev. C
9.3.2 Mode Sense data
The Mode Sense command provides a means for the drive to report its operating parameters to the initiator.
The drive maintains four sets of Mode parameters, Default values, Saved values, Current values and Changeable values.
Default values are hard coded in the drive firmware that is stored in flash EPROM nonvolatile memory on the
drive PCBA. Default values can be changed only by downloading a complete set of new firmware into the flash
EPROM. An initiator can request and receive from the drive a list of default values and use those in a Mode
Select command to set up new current and saved values, where the values are changeable.
Saved values are stored on the disk media using a Mode Select command. Only parameter values that are
allowed to be changed can be changed by this method. See “Changeable values” defined below.Parameters in
the saved values list that are not changeable by the Mode Select command get their values from the default
values storage.
Current values are volatile values currently being used by the drive to control its operation. A Mode Select command can be used to change these values (only those that are changeable). Originally, they are installed from
saved or default values after a power on reset, hard reset, or Bus Device Reset message.
Changeable values form a bit mask, stored in nonvolatile memory, that dictates which of the current values and
saved values can be changed by a Mode Select command. A “one” allows a change to a corresponding bit; a
“zero” allows no change. For example, in T able 7 refer to Mode page 01, in the row entitled “CHG”.Theseare
hex numbers representing the changeable values for mode page 01. Note that bytes 04, 05, 06, and 07 are not
changeable, because those fields are all zeros. If some changeable code had a hex value EF, that equates to
the binary pattern 1110 1111. If there is a zero in any bit position in the field, it means that bit is not changeable. Bits 7, 6, 5, 3, 2, 1, and 0 are changeable, because those bits are all ones. Bit 4 is not changeable.
Though the drive always reports non-zero values in bytes 00 and 01, those particular bytes are never changeable.
The Changeable values list can only be changed by downloading new firmware into the flash EPROM.
On standard OEM drives the Saved values are taken from the default values list and stored into the saved val-
ues storage location on the media prior to shipping.
When a drive is powered up, it takes saved values from the media and stores them to the current values stor-
age in volatile memory. It is not possible to change the current values (or the saved values) with a Mode Select
command before the drive is up to speed and is “ready.” An attempt to do so results in a “Check Condition status being returned.
Note. Because there may be several different versions of drive control firmware in the total population of
drives in the field, the Mode Sense values given in thefollowing tables may not exactly match those of
some drives.
Page 57

Barracuda 180 Product Manual, Rev. C 47
The following tables list the values of the data bytes returned by the drive in response to the Mode Sense command pages for SCSI Ultra160 implementation (see the
SCSI Interface Product Manual
).
Definitions: DEF = Default value. Standard drives are shipped configured this way.
CHG = Changeable bits; indicates if current and saved values are changeable.
Note. Saved values for OEM drives are normally the same as the default values.
Table 7: Mode sense data, ST1181677 values
Bytes 00010203040506070809101112 1314151617181920212223
Mode
Sense
Data
Mode
Page
01 DEF
01 CHG 81 0A FF FF 00 00 00 00 FF 00 FF FF
02 DEF 82 0E 80 80 00 0A 00 00 00 00 00 00 00 00 00 00
02 CHG 82 0E FF FF 00 00 00 00 00 00 00 00 87 00 00 00
03 DEF 83 16 11 06 00 00 00 10 00 00 02 63 02 00 00 01 00 5A 00 54 40 00 00 00
03 CHG
04 DEF 84 16 00 5E B7 18 00 00 00 00 00 00 00 00 00 00 00 00 00 00 1C 09 00 00
04 CHG
07 DEF 87 0A 00 0B F0 00 00 00 00 00 FF FF
07 CHG 87 0A 0F FF 00 00 00 00 00 00 FF FF
08 DEF 88 12 14 00 FF FF 00 00 FF FF FF FF 80 03 00 00 00 00 00 00
08 CHG 88 12 B5 00 00 00 FF FF FF FF 00 00 A0[1]FF 00 00 00 00 00 00
0A DEF 8A 0A 02 00 00 00 00 00 00 00 15 DA
0A CHG 8A 0A 03 F1 00 00 00 00 00 00 00 00
00 A6 00 10 00 00 00 08 15 22 C4 41 00 00 02 00
<------------------------------Mode Page Headers and Parameter Data Bytes---------------------------->
81 0A C0 0B F0 00 00 00 05 00 FF FF
83 16 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
84 16 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
1A DEF 9A 0A 00 03 00 00 00 01 00 00 00 04
1A CHG 9A 0A 00 03 00 00 00 00 00 00 00 00
1C DEF 9C 0A 10 00 00 00 00 00 00 00 00 01
1C CHG 9C 0A 9D 0F FF FF FF FF FF FF FF FF
00 DEF 80 06 00 00 07 00 00 00
00 CHG 80 06 FF 40 07 00 00 00
Read capacity data
15 22 C4 40 00 00 02 00
[1] Although byte 12, bit 7 (a0) is shown as changeable, the FSW function governed by that bit is not imple-
mented by this drive.
Page 58

48 Barracuda 1 80 Product Manual, Rev. C
9.4 SCSI bus conditions and mis cellaneous features supported
Asynchronous SCSI bus conditions supported by the drive are listed below. These conditions cause the SCSI
device to perform certain actions and can alter the SCSI bus phase sequence. Other miscellaneous operating
features supported are also listed here. Refer to the
Table 8: SCSI bus conditions and other miscellaneous features
SCSI Interface Product Manual
for details.
Condition/feature supported by:
SCSI-2/SCSI-3 Conditions or feature
Y AdaptiveCaching
Y ArbitratingSystem
Y Asynchronous Data Transfer
N Asynchronous Event Notification
Y Attention Condition
N Auto Contingent Allegiance Condition
Y Contingent Allegiance Condition
Y Deferred Error Handling
Y Disconnect/Reconnect
N High voltage differential (HVD) interface available
Y Low voltage differential (LVD)interface available
Y Parameter Rounding (controlled by the Round bit in Mode Select page 0)
Y Queue tagging (up to 64 Queue tags supported)
Y Reporting actual retry count in Extended Sense bytes 15, 16 and 17.
Y Reset Condition
Y Segmented Caching
Y Synchronous Data Transfer
N Zero Latency Read
SCSI-2/SCSI-3 Status supported
Y Good
Y Check Condition
Y Condition Met/Good
YBusy
Y Intermediate/Good
Y Intermediate/Condition Met/Good
Y Reservation Conflict
Y Queue Full
NACAActive
Page 59

Barracuda 180 Product Manual, Rev. C 49
9.5 Synchronous data transfer
9.5.1 Synchronous data transfer periods supported
The data transfer period to be used by the drive and the initiator is established by an exchange of messages
during the Message Phase of operation. See the section on message protocol in the
Manual,
part number 75789509. In the following tables, M is the synchronous period value (in the transfer rate
SCSI Interface Product
negotiation message) that represents the associated transfer period and transfer rate values.
Table 9 lists the synchronous data transfer periods supported by the drive in DT Data phase. DT Data phase is
only allowed when using theLVD interface.
Table 9: Synchronous DT Data transfer periods
M(decimal)
Transfer period
(nanoseconds)
Transfer rate
(megatransfers/second)
9 12.5 80.0
10 25 40.0
12 50 20.0
25 100 10.0
Table 10 lists the synchronous data transfer periods supported by the drive in ST Data phase. ST Data phase
is allowed with either LVD or SE interface except as noted.
Table 10: Synchronous ST Data transfer periods
M(decimal)
Transfer period
(nanoseconds)
10 25
Transfer rate
(megatransfers/second)
1
40.0
12 50 20.0
25 100 10.0
50 200 5.0
1. This transfer rate is only allowed when using the LVD interface.
9.5.2 REQ/ACK offset
Barracuda 180 family drives support REQ/ACK offset values from 7 to 63 (3Fh). Offsets 1 through 6 are negotiated to 0 (asynchronous transfer).
9.6 Physical interface
This section describes the connectors, cables, signals, terminators and bus timing of the DC and SCSI I/O
interface. See Section 9.8 and Section 9.9 for additional terminator information.
Figures 16 and 17 show the locations of the DC power connector, SCSI interface connector, drive select headers, and option select headers.
Details of the physical, electrical and logical characteristics are given in sections following, while the SCSI
operational aspects of Seagate drive interfaces are given in the
SCSI Interface Product Manual
.
9.6.1 DC cable and connector
ST1181677LW/LWV drives receive DC power througha4pinconnector(seeFigure18forpinassignment)
mounted at the rear of the main PCBA. Recommended part numbers of the mating connector are listed below,
but equivalent parts may be used.
Type of cable Connector Contacts (20-14 AWG)
14 AWG MP 1-480424-0 AMP 60619-4 (Loose Piece)
AMP 61117-4 (Strip)
LC/LCV model drives receive power through the 80-pin I/O connector. See Tables 14 and 15.
Page 60

50 Barracuda 1 80 Product Manual, Rev. C
J1
Pin 1
Pin 1A
J1
Pin 1
68 Pin
SCSI I/O
Connector
J5
Pin
1P
2P
3P
4P
Pin 1P
J5
Pin 1A
J1-DC Power
J2
Power
+12V
+12V ret
+ 5V ret
+5V
J1-DC Power
1P2P3P4P
PCB
J6
Figure 16. ST1181677LW/LWVdrive physical interface (68-pin J1 SCSI I/O connector)
80-pin
SCSI I/O
Connector
Pin 1
J2
J6
Figure 17. ST1181677LC/LCV drive physical interface (80-pin J1 SCSI I/O connector)
Page 61

Barracuda 180 Product Manual, Rev. C 51
9.6.2 SCSI interface physical description
The drive models describedby this product manual support the physical interface requirements of the Ultra160
SCSI Parallel Interface-3 (SPI-3) standards as defined in American National Standard document T10/1302D,
and operate compatibly at the interface with devices that support earlier SCSI-2 and SCSI-3 standards. It
should be noted that this is only true if the systems engineering has been correctly done, and if earlier SCSI-2
and SCSI-3 devices respond in an acceptable manner (per applicable SCSI Standards) to reject newer
Ultra160 protocol extensions that they don’t support.
The drives documented in this manual support single-ended and low voltage differential physical interconnects
(hereafter referred to as SE and LVD, respectively) as described in the ANSI SPI-3 standard. These drives
implement driver and receiver circuits that can operate either SE orLVD. However, they cannot switch dynamically between SE and LVD operation.
The drives typically operate on a daisy-chain interface in which other SCSI devices are also operating. Devices
on the daisy chain must all operate in the same mode, either SE or LVD, but not a mixture of these. On the
interface daisy chain, all signals are common between all devices on the chain, or bus, as it is also called. This
daisy chain of SCSI devices must be terminated at both ends with the proper impedance in order to operate
correctly. Do not terminate intermediate SCSI devices. In some cases, the SCSI devices at each end have
onboard termination circuits that can be enabled by installation of a jumper plug (TE) on the device. These termination circuits receive power from either a source internal to the device, or from a line in the interface cable
specifically powered for that purpose. LC/LCV and LW/LWV model drives do not have onboard termination circuits. Some type of external termination circuits must be provided for these drives by the end user or designers
of the equipment into which the drives will be integrated. See Standard T10/1302D, sections 6.6 and 6.7 for the
maximum number of devices that can successfully operate at various interface transfer rates on SE and LVD
daisy chains.
LC/LCV model drives plug into PCBA or bulkhead connectors in the host. They may be connected in a daisychain by the host backplane wiring or PCBA circuit runs that have adequate DC current carrying capacity to
support the number of drives plugged into the PCBA or bulkhead connectors. A single 80-pin I/O connector
cable cannot support the DC current needs of several drives, so no daisy chain cables beyond the bulkhead
connectors should be used. A single drive connected via a cable to a host 80-pin I/O connector is not recommended.
Table 11 shows the interface transfer rates supported by the various drive models defined in this manual.
Table 11: Interface transfer rates supported
Maximum transfer rate
Interface type/
drive models
SE
Mode
LVD
Mode
ST1181677
ST1181677
ST1181677
ST1181677
LC/LCV
LW/LWV
LC/LCV
LW/LWV
Asynchronous Fast-5 Fast-10
yes yes yes yes no no
yes yes yes yes yes yes
Fast-20
(Ultra)
Fast-40
(Ultra2)
Fast-80
(Ultra160)
9.6.3 SCSI interface cable requirements
The characteristics of cables used to connect Ultra160 SCSI parallel interface devices are discussed in detail
in section 6 of ANSI Standard T10/1302D. The cable characteristics that must be considered when interconnecting the drives described in this manual in a Ultra160 SCSI parallel, daisy-chain interconnected system are:
• characteristic impedance (see T10/1302D Section 6)
• propagation delay (see T10/1302D Section 6)
• cumulative length (see T10/1302D Section 6)
• stub length (see T10/1302D Section 6)
• device spacing (see T10/1302D Section 6)
Page 62

52 Barracuda 1 80 Product Manual, Rev. C
To minimize discontinuances and signal reflections, cables of different impedances should not be used in the
same bus. Implementations may require trade-offs in shielding effectiveness, cable length, number of loads
and spacing, transfer rates, and cost to achieve satisfactory system operation. If shielded and unshielded
cables are mixed within the same SCSI bus, the effect of impedance mismatch must be carefully considered.
Proper impedance matching is especially important in order to maintain adequate margin at FAST-20, FAST40, and FAST-80 SCSI transfer rates.
Note. For LVD operation, twisted pair cables are recommended. For LVD Fast-40 operation, twisted pair
cables are
ST1181677LC/LCV:
The 80-pin connector option is intended for use on drives that plug directly into backplane connector in the host
equipment. In such installations, all backplane wiring segments are subject to the electromagnetic concepts
presented in Standard T10/1302D, section 6. For LC/LCV model drives, installations with connectors on cables
are not recommended.
9.6.4 Mating connectors
Part numbers for the different type connectors that mate with the various Barracuda 180 I/O connectors are
given in the sections following.
9.6.4.1 Mating connectors for LW/LWV drives
The nonshielded cable connector shall be a 68 conductor connector consisting of two rows of 34 male contacts
with adjacent contacts 0.050 inch (1.27 mm) apart.
strongly
recommended. For Fast-80 (Ultra160) operation, twisted pair cables are
required
.
Recommended mating flat cable connector part numbers are:
Amp Model 786096-7 Female, 68-pin, panel mount
Amp Model 786090-7 Female, 68-pin, cable mount
Amp Model 749925-5 (50 mil conductor centers, 28 or 30 AWG wire)
Use two, 34 conductor, 50 mil center flat cable with this connector.
This type connector can only be used on cable ends. [1]
Amp Model 88-5870-294-5 W/O Strain Relief (25 mil conductor centers, 30 AWG wire).
Use either on cable ends or in cable middle section for daisy-chain
installations. [1]
Amp Model 1-480420-0 Power connector 4 circuit housing
Berg 69307-012 12-position, 2 x 6, 2 mm receptacle housing
[1] See Figure 18.
The drive device connector is a nonshielded 68 conductor connector consisting of two rows of 34 female pins
with adjacent pins 50 mils apart. The connector is keyed by means of its shape (see Figure 19).
9.6.4.2 Mating connectors for LC/LCV model drives
The nonshielded connector shall be an 80-conductor connector consisting of two rows of 40 contacts with adjacent contacts 50 (1.27 mm) mils apart (see Figure 20). I/O connection using a cable is not recommended. The
length and size of the host equipment DC power carrying conductors from the DC power source to the host
equipment 80-pin disk drive interface connector(s) should be strictly designed according to proper power transmission design concepts. No possibility for the equipment user to attach an 80-pin cable/connector should be
allowed, since the length of the DC power carrying conductors could not be controlled and therefore could
become too long for safe power transmission to the drive. Daisy-chain 80-conductor cables should especially
not be allowed, since the power-carrying conductors on the 80-conductor interface were not intended to support a series of drives.
To insure that both drive connector and host equipment mating connector mate properly, both drive connector
and host equipment mating connector must meet the provisions of “SFF-8451 Specification for SCA-2
Unshielded Connections.”
Page 63

Barracuda 180 Product Manual, Rev. C 53
Recommended mating 80-position PCBA mount connectors:
Straight-in connector Hot plug version (with ground guide-pin)
Seagate P/N: 77678703
Amp US P/N:
or
Amp US P/N:
or
2-557103-1
94-0680-02-1
2-557103-2
94-0680-02-2
787311-1 with polarization
787311-2 without polarization
Amp Japan P/N: 5-175475-9
Right-angle to PCBA connectors
Seagate P/N: 77678559
Amp US P/N: 2-557101-1
Amp Japan P/N: 5-175474-9
For additional information call Amp FAX service at 1-800-522-6752.
“LW/LWV” Model
Drives
Terminator
[6]
SCSI ID 1
[2]
SCSI ID 0
[2]
[7]
2 through X
SCSI devices [4]
Pin 1
(check your
adapter for Pin 1 location)
SCSI ID 7 [5]
[1]
Host Adapter
PCB
[3]
[1] Closed end type 68-pin connector used.Terminators enabled.
[2] Open end type (in-line application) connector used.
[3] Host need not be on the end of the daisy-chain. Another device can be on the end with the terminator, the
host having no terminator.
[4] Total interface cable length must not exceed that specified in ANSI document T10/1302D (including host
adapter/initiator). The cable length restriction limits the total number of devices allowed.
[5] SCSI ID7 has highest arbitration priority, then ID15 to ID8 (ID 8 very lowest).
[6] Last drive on the daisy chain.
[7] Open-end type 68-pin connector used. If end device, use external terminator and closed-end type 68-pin
connector.
Figure 18. SCSI daisy chain interface cabling for LW/LWV drives
Page 64

54 Barracuda 1 80 Product Manual, Rev. C
3.650±.005
.100
(2.54)
.15 5
.050
.022
.346
1.650 .3937 .600
.519
(13.18)
1.816
(46.13)
Position 1
.315
(8.00)
.270
.0787 .200
.020 .047
.60
(15.24)
Pos.
1
Pos.
1
3
4
12
.20
(5.08)
.085
(2.16)
typ
x45°chamfer
typ
.315±.010
(8.00)
.218
(5.54)
Pos. 68
.050
(1.27)
1.650
(41.91)
.980
(24.89)
1.368
(37.74)
Pos. 35
.0787
(2.00)
Pos.
2
.767
(19.48)
3.650
(92.71)
Figure 19. Nonshielded 68 pin SCSI device connector used on LW/LWV drives
.840 ± .005
(21.34)
+.001
–.002
dia
.083
(2.1)
Trifurcated Pins
(4 places)
Page 65

Barracuda 180 Product Manual, Rev. C 55
7.00
(.276)
Pin 1
0.15
62.15
(2.447)
0.15
Housing
MYM
–Y–
± 0.15
(± .005)
MYM
57.87
(2.278)
Grounding
0
–0.15
+ .000
[
– .006
Pins
[
C
of Datum Y
L
12.70
(.500)
2.15±0.10
2 places
X
End View
Front View
Insert mating
I/O connector
Top View
Contact
0.50
(.020)
0.3
(.012)
1.27
(.05)
Typ
MYM
Pin 1 Pin 40
Pin 41 Pin 80
C
L
X
of Datum Y
Figure 20. Nonshielded 80 pin SCSI “SCA-2” connector, used on LC/LCV drives
Grounding
Pins
Back View
Page 66

56 Barracuda 1 80 Product Manual, Rev. C
Table 12: LW/LWV 68-conductor single-ended (SE) P cable signal/pin assignments [13]
Note. A minus sign preceding a signal name indicates that signal is active low.
Signal
name [1]
Connector
contact
number [3]
Connector
contact
number [3]
Signal
name [1]
GND 1 35 –DB12
GND 2 36 –DB13
GND 3 37 –DB14
GND 4 38 –DB15
GND 5 39 –DBP1
GND 6 40 –DB0
GND 7 41 –DB1
GND 8 42 –DB2
GND 9 43 –DB3
GND 10 44 –DB4
GND 11 45 –DB5
GND 12 46 –DB6
GND 13 47 –DB7
GND 14 48 –DBP
GND1549GND
GND1650GND
TermPwr1751TermPwr
TermPwr1852TermPwr
Reserved 19 53 Reserved
GND2054GND
GND 21 55 –ATN
GND2256GND
GND 23 57 –BSY
GND 24 58 –ACK
GND 25 59 –RST
GND 26 60 –MSG
GND 27 61 –SEL
GND 28 62 –C/D
GND 29 63 –REQ
GND 30 64 –I/O
GND 31 65 –DB8
GND 32 66 –DB9
GND 33 67 –DB10
GND 34 68 –DB11
Notes [ ]: See page following Table 15.
Page 67

Barracuda 180 Product Manual, Rev. C 57
Table 13: LW/LWV 68-conductor LVD P cable signal/pin assignments [13]
Note. A minus sign preceding a signal name indicates that signal is active low.
Signal
name [1]
Connector
contact
number [3]
Connector
contact
number [3]
Signal
name [1]
+DB12 1 35 –DB12
+DB13 2 36 –DB13
+DB14 3 37 –DB14
+DB15 4 38 –DB15
+DBP1 5 39 –DBP1
+DB0 6 40 –DB0
+DB1 7 41 –DB1
+DB2 8 42 –DB2
+DB3 9 43 –DB3
+DB4 10 44 –DB4
+DB5 11 45 –DB5
+DB6 12 46 –DB6
+DB7 13 47 –DB7
+DBP 14 48 –DBP
Ground 15 49 Ground
DIFFSNS[8]1650Ground
TermPwr1751TermPwr
TermPwr1852TermPwr
Reserved 19 53 Reserved
Ground 20 54 Ground
+ATN 21 55 –ATN
Ground 22 56 Ground
+BSY 23 57 –BSY
+ACK 24 58 –ACK
+RST 25 59 –RST
+MSG 26 60 –MSG
+SEL 27 61 –SEL
+C/D 28 62 –C/D
+REQ 29 63 –REQ
+I/O 30 64 –I/O
+DB8 31 65 –DB8
+DB9 32 66 –DB9
+DB10 33 67 –DB10
+DB11 34 68 –DB11
Notes [ ]: See page following Table 15.
Page 68

58 Barracuda 1 80 Product Manual, Rev. C
Table 14: LC/LCV 80-pin single-ended (SE) I/O connector pin assignments [13]
Note. A minus sign preceding a signal name indicates that signal is active low.
Connector
Signal
name [1]
contact
number [3]
Signal
number [3]
Contact
name[1]
12 V CHARGE 1 41 12 V GND
12 V 2 42 12 V GND
12 V 3 43 12 V GND
12 V 4 44 MATED 1
NC [10] 5 45 NC [10]
NC [10] 6 46 DIFFSNS [8]
–DB11 7 47 GND
–DB10 8 48 GND
–DB9 9 49 GND
–DB81050GND
–I/O 11 51 GND
–REQ1252GND
–C/D1353GND
–SEL1454GND
–MSG1555GND
–RST1656GND
–ACK1757GND
–BSY1858GND
–ATN1959GND
–DBP2060GND
–DB72161GND
–DB62262GND
–DB52363GND
–DB42464GND
–DB32565GND
–DB22666GND
–DB12767GND
–DB02868GND
–DP12969GND
–DB15 30 70 GND
–DB14 31 71 GND
–DB13 32 72 GND
–DB12 33 73 GND
+5V3474MATED2
+5V35755VGND
+5V36765VGND
NC [10] 37 77 ACTIVE LED OUT [4] [9]
RMT-START [5] [9] 38 78 DLYD-START [6] [9]
SCSIID(0)[7][9]3979SCSIID(1)[7][9]
SCSIID(2)[7][9]4080SCSIID(3)[7][9]
Notes [ ]: See page following Table 15.
Page 69

Barracuda 180 Product Manual, Rev. C 59
Table 15: LC/LCV 80-pin single-ended (LVD) I/O connector pin assignments [13]
Note. A minus sign preceding a signal name indicates that signal is active low.
Connector
Signal
name [1]
contact
number [3]
Signal
number [3]
Contact
name[1]
12 V CHARGE 1 41 12 V GND
12 V 2 42 12 V GND
12 V 3 43 12 V GND
12 V 4 44 MATED 1
NC [10] 5 45 NC [10]
NC [10] 6 46 DIFFSNS [8]
–DB11 7 47 +DB11
–DB10 8 48 +DB10
–DB9 9 49 +DB9
–DB81050+DB8
–I/O 11 51 +I/O
–REQ1252+REQ
–C/D1353+C/D
–SEL1454+SEL
–MSG1555+MSG
–RST1656+RST
–ACK1757+ACK
–BSY1858+BSY
–ATN1959+ATN
–DBP2060+DBP0
–DB72161+DB7
–DB62262+DB6
–DB52363+DB5
–DB42464+DB4
–DB32565+DB3
–DB22666+DB2
–DB12767+DB1
–DB02868+DB0
–DBP1 29 69 +DP1
–DB15 30 70 +DB15
–DB14 31 71 +DB14
–DB13 32 72 +DB13
–DB12 33 73 +DB12
+5V3474MATED2
+5V35755VGND
+5 V CHARGE 36 76 5 V GND
NC [10] 37 77 ACTIVE LED OUT [4] [9]
RMT_START [5] [9] 38 78 DLYD_START [6] [9]
SCSIID(0)[7][9]3979SCSIID(1)[7][9]
SCSIID(2)[7][9]4080SCSIID(3)[7][9]
Notes [ ]: See page following this table.
Page 70

60 Barracuda 1 80 Product Manual, Rev. C
Notes [ ] for Tables 12 through 15.
[1] See Section 9.6.4.1 for detailed electrical characteristics of these signals.
[2] The conductor number refers to the conductor position when using 0.025-inch (0.635 mm) centerline flat
ribbon cable. Other cables types may be used to implement equivalent contact assignments.
[3] Connector contacts are on 0.050 inch (1.27 mm) centers.
[4] Front panel LED signal; indicates drive activity for host front panel hard drive activity indicator.
[5] Asserted by host to enable Motor Start option (enables starting motor via SCSI bus command).
[6] Asserted by host to enable Delayed Motor Start option (motor starts at power on or after a delay of 12 sec-
onds times drive ID). This and [3] above are mutually exclusive options.
[7] Binary code on A3, A2, A1 and A0 asserted by host to set up SCSI bus ID in drive.
[8] GND provides a means for differential devices to detect the presence of a single endeddevice on the bus.
Drive will not operate I/O bus at Ultra2 or Ultra160 SCSI data rates if this is grounded.
[9] Signals [4] through [7] are used in place of installing jumpers and cables on option select connectors J2
and J6. See Section 8.1.1 notes.
[10] “NC” means no connection.
[11] The conductor number refers to the conductor position (right to left in Figure 18) when using 0.050 inch
(1.27 mm) centerline flat ribbon cable. Other cable types may be used to implement equivalent contact
assignments.
[12] Connector contacts are on 0.100 inch (2.54 mm) centers.
[13] 8 bit devices which are connected to the 16 data bit LVD I/O shall leave the following signals open: –DB8,
–DB9, –DB10, –DB11, –DB12, –DB13, –DB14, –DB15, and –DBP1.
8 bit devices which are connected to the 16 data bit single-ended (SE) I/O shallhave the following signals
open: DB8, –DB9, –DB10, –DB11, –DB12, –DB13, –DB14, –DB15, and –DBP1.
All other signals should be connected as shown.
9.7 Electrical description
Barracuda 180 drives are multimode devices. That is, their I/O circuits can operate as either single-ended or
low voltage differential drivers/receivers (selectable using the I/O DIFFSNS line).
See ANSI Standard T10/1302D for details electrical specifications.
9.7.1 Multimode—SE and LVD alternatives
When the interface DIFFSNS line is between +0.35 V and +0.5 V, the drive interface circuits operate singleended and up to and including 20 M transfers/s (Fast-20 or Ultra SCSI). When DIFFSNS is between +0.7 V
and +1.9 V, the drive interface circuits operate low voltage differential and up to and including 80 M transfers/s
or less (Fast-40 or Ultra160 SCSI).
This multimode design does not allow dynamically changing transmission modes. Drives must operate only in
the mode for which the installation and interface cabling is designed. Multimode I/O circuits used by these
drives do not operate at high voltage differential levels and should never beexposed to high voltage differential
environments unless the common mode voltages in the environment are controlled to safe levels for singleended and low voltage differential devices (see the ANSI SPI-3 specification T10/1302D).
Multimode signals
Multimode circuit SE alternative signal characteristics are the same as described elsewhere in Section 9.7.1.
The SE alternative for these circuits is selected as described abo ve. SE cables and termination must be used.
These drives do not have onboard terminators. The Multimode signal lines (either SE or LVD) should be terminated with 110 ohm active terminator circuits at each end of the total cable. Termination of the I/O lines must be
provided for by the Host equipment designers or end users.
The SE and differential alternatives are mutually exclusive.
Page 71

Barracuda 180 Product Manual, Rev. C 61
Output characteristics
Each signal (V
) dr iven by LVD interface drivers shall havethe following output characteristics when measured
s
at the disc drive connector:
Steady state Low level output voltage* = –.95 V = < V
Steady state High level output voltage* = –.95 V = < V
Differential voltage = +
0.6 V minimum with common-mode voltage ranges 0.700 V = < Vcm= < 1.800 V.
=<–1.55 V (signal negation/logic 0)
s
= < 1.55 V (signal assertion/logic 1)
s
*These voltages shall be measured between the output terminal and the SCSI device’s logic ground reference.
The output characteristics shall additionally conform to EIA RS-485.
LVD Differential
Driver
Signal +
Signal –
LVD Differential
Driver
Signal +
Signal –
|=.6V
|V
0
Figure 21. LVD output signals
1.55V
.95V +15ma
.95V
1.55V –15ma
–15ma
+15ma
= True / Logic 1 / Assertion
V
0
= False / Logic 0 / Negation
V
0
Input characteristics
Each signal (Vs) received by LVD interface receiver circuits shall have the following input characteristics when
measuredat the disk drive connector:
Steady state Low level output voltage* = 0.030 V = < V
Steady state High level output voltage* = –3.6 V = < V
Differential voltage = +
0.30 V minimum with common-mode voltage ranges 0.700 V = < Vcm= < 1.800 V.
= < 3.6 V (signal negation/logic 0)
s
=<–0.030 V (signal assertion/logic 1)
s
(X3T10/1302D Annex A)
*These voltages shall be measured between the output terminal and the SCSI device’s logic ground reference.
Input characteristics shall additionally conform to EIA RS-485-983.
VCCA VCCB
LVD Signal Drivers
LVD
Receiver
LVD Signal Drivers
Single
Ended
Receiver
Single
Ended
Negation
Driver
Single
Ended
Assertion
Driver
Single
Ended
Ground
Driver
Single
Ended
Circuitry
Ground
Single Ended:
LVD:
GND
+Signal
Figure 22. Typical SE-LVD alternative transmitter receiver circuits
–Signal
–Signal
Page 72

62 Barracuda 1 80 Product Manual, Rev. C
9.7.1.1 Single-ended drivers/receivers
The maximum total cable length allowed with drives using single-ended I/O driver and receiver circuits
depends on several factors. Table 16 lists the maximum lengths allowed for different configurations of drive
usage. These values are from the SPI-3 document. All device I/O lines must have equal to or less than 25 pf
capacitance to ground, measured at the beginning of the stub.
Table 16: Cable characteristics for single-ended circuits
Maximum number of
I/O transfer rate
<10M transfers/s 16 (wide SCSI bus) 6 meters (19.7 ft) 90 + 6Ohms 90+10Ohms
20M transfers/s 4 (wide SCSI bus) 3 meters (9.8 ft) 90 + 6Ohms 90+10Ohms
<
20M transfers/s 8 (wide SCSI bus) 1.5 meters (4.9 ft) 90 + 6Ohms 90+10Ohms
<
devices on the bus
Maximum cable
length allowed
Transmission line impedance
REQ/ACK Other signals
A stub length of no more than 0.1 meter (0.33 ft) is allowed off the mainline interconnection with any connected
equipment. The stub length is measured from the transceiver to the connection to the mainline SCSI bus.
Single-ended I/O cable pin assignments for LW/LWV drives are shown in Table 13.
Single-ended I/O pin assignments for the LC/LCV models are shown in Table 14. The LC/LCV models do not
require an I/O cable—they are designed to connect directly to a back panel connector.
9.7.1.2 Low voltage differential I/O circuits
The maximum total cable length for use with drives using LVD I/O drivers and receiver circuits is 12 meters
(39.37 ft.). A stub length of no more than 0.1 meter is allowed off the mainline interconnection with any connected equipment. LVD I/O pin assignments for L W/LWV model drives are shown in tables 12 and 13. LVD I/O
pin assignments for LC/LCV model drives are shown in tables 14 and 15.
9.7.1.3 General cable characteristics
A characteristic impedance of 100 ohm + 10% is recommended for unshielded flat or twisted pair ribbon cable.
However, most available cables have a somewhat lower characteristic impedance. To Minimize discontinuities
and signal reflections, cables of different impedances should not be used in the same bus. Implementations
may require tradeoffs in shielding effectiveness, cable length, the number of loads, transfer rates, and cost to
achieve satisfactory system operation. If shielded and unshielded cables are mixed within the same SCSI bus,
the effect of impedance mismatch must be carefully considered. Proper impedance matching is especially
important in order to maintain adequate margin at fast SCSI transfer rates.
9.8 Terminator requirements Caution: These drives do not have onboard internal terminators. The user, systems integrator or host equip-
ment manufacturer must provide a terminator arrangement external to the drive when termination is
required. For LW/LWV drives, terminator modules can be purchased that plug between the SCSI I/
O cable and the drive I/O connector or on the end of a short I/O cable stub extending past the last
cable connector. LC/LCV drives are designed to be plugged into a backpanel connector without
cabling.
9.9 Terminator power LW/LWV drives
You can configure terminator power from the drive to the SCSI bus or have the host adaptor or other device
supply terminator power to the external terminator. See Section 8.1 for illustrations that show how to place
jumpers for this configuration.
LC/LCV drives
These drives cannot furnish terminator power because no conductors in the 80-pin I/O connector are devoted
to terminator power.
Page 73

Barracuda 180 Product Manual, Rev. C 63
9.10 Disc drive SCSI timing
Table 17: Disc drive SCSI timing
Description
Waveform
symbol [1]
Waveform
table [1] Typical timing
Target Select Time (no Arbitration) T00 N/A <1 µs
Target Select Time (with Arbitration) T01 4.5-1,2 1.93 µs
Target Select to Command T02 4.5-1 3.77 µs
Target Select to MSG Out T03 4.5-2 1.57 µs
Identify MSG to Command T04 4.5-3 3.36 µs
Command to Status T05 4.5-5 Command Dependent
Command to Data (para. In) T06 4.5-9 Command Dependent
Command to Data (para. Out) T07 4.5-10 Command Dependent
Command to Data (Write to Data Buffer) T08 4.5-10 Command Dependent
Command to Disconnect MSG T09 4.5-6 Command Dependent
Disconnect MSG to Bus Free T10 4.5-6,14 0.52 µs
Disconnect to Arbitration (for Reselect)
T11 4.5-6 Command Dependent
This measures disconnectedCMD overhead
Target win Arbitration (for Reselect) T12 4.5-7 3.00 µs
Arbitration to Reselect T13 4.5-7 1.60 µs
Reselect to Identify MSG In T14 4.5-7 1.39 µs
Reselect Identify MSG to Status T15 4.5-8 Command Dependent
Reselect Identify MSG to Data (media) T16 4.5-11 Command Dependent
Data to Status T17 4.5-15 Command Dependent
Status to Command Complete MSG T18 4.5-5,8,15 0.98 µs
Command Complete MSG to Bus Free T19 4.5-5,8,15 0.51 µs
Data to Save Data Pointer MSG T20 4.5-14 4.00 µs
Save Data Pointer MSG to Disconnect MSG T21 4.5-14 0.79 µs
Command Byte Transfer T22 4.5-4 0.04 µs
Next Command Byte Access: 4.5-4
Next CDB Byte Access (Byte 2 of 6) T23.6.2 4.5-4 0.58 µs
Next CDB Byte Access (Byte 3 of 6) T23.6.3 4.5-4 0.12 µs
Next CDB Byte Access (Byte 4 of 6) T23.6.4 4.5-4 0.12 µs
Next CDB Byte Access (Byte 5 of 6) T23.6.5 4.5-4 0.12 µs
Next CDB Byte Access (Byte 6 of 6) T23.6.6 4.5-4 0.12 µs
Next CDB Byte Access (Byte 2 of 10) T23.10.2 4.5-4 0.59 µs
Next CDB Byte Access (Byte 3 of 10) T23.10.3 4.5-4 0.11 µs±1µs
Next CDB Byte Access (Byte 4 of 10) T23.10.4 4.5-4 0.12 µs±1µs
Next CDB Byte Access (Byte 5 of 10) T23.10.5 4.5-4 0.11 µs±1µs
Next CDB Byte Access (Byte 6 of 10) T23.10.6 4.5-4 0.11 µs±1µs
Next CDB Byte Access (Byte 7 of 10) T23.10.7 4.5-4 0.13 µs±1µs
Next CDB Byte Access (Byte 8 of 10) T23.10.8 4.5-4 0.12 µs±1µs
Next CDB Byte Access (Byte 9 of 10) T23.10.9 4.5-4 0.12 µs±1µs
Next CDB Byte Access (Byte 10 of 10) T23.10.10 4.5-4 0.12 µs±1µs
Page 74

64 Barracuda 1 80 Product Manual, Rev. C
Table 17: Disc drive SCSI timing (Continued)
Description
Waveform
symbol [1]
Waveform
table [1] Typical timing
Data In Byte Transfer (parameter) T24 4.5-12 0.04 µs
Data Out Byte Transfer (parameter) T25 4.5-13 0.04 µs
Next Data In Byte Access (parameter) T26 4.5-12 0.12 µs
Next Data Out Byte Access (parameter) T27 4.5-13 0.12 µs
Data In Byte Transfer (media) [2] T28 4.5-12 0.04 µs
Data Out Byte Transfer (media) [2] T29 4.5-13 0.04 µs
Next Data In Byte access (media [2] T30 4.5-12 0.12 µs
Next Data Out Byte access (media [2] T31 4.5-13 0.12 µs
MSG IN Byte Transfer T32 4.5-5,7,8,14,15 0.04 µs
MSG OUT Byte Transfer T33 4.5-2 0.04 µs
STATUS Byte Transfer T34 4.5-5,8,15 0.04 µs
Synchronous Data Transfer Characteristics:
Request Signal Transfer Period [3] –– various (800 ns max)
Notes.
[1] See the
SCSI Interface Product Manual.
[2] Maximum SCSI asynchronous interface transfer rate is given in Section 4.2.3 of this manual.
[3] Synchronous Transfer Period is determined by negotiations between an Initiator and a Drive. The Drive is
capable of setting periods as given in Section 9.5. See also the
SCSI Interface Product Manual
for a
description of synchronous data transfer operation.
9.11 Drive activity LED
The following table provides drive activity LED status.
Table 18: Drive activity LED status
Spindle status Command status LED status
Spinning up with DC power applied N/A On until spinup is complete
Spun down Start Unit On while processing the command
Powered down by removalof DC power N/A Off due to absence of power
Spun up Stop Unit On while processing the command
Spun down No command activity Off
Spun down Write/Read Buffer Onwhile processing the command
Spun down SCSI Bus Reset On while processing the reset
Spun down Test Unit Ready On while processing the command
Spun up No command activity Off
Spun up Write/Read On while processing the command
Spun up SCSI Bus Reset On while processing the reset
Spun up Test Unit Ready On while processing the command
Spun up Format with Immediate option on On while the command is initially processed
Spun up Format without Immediate LED toggles on/off on each cylinder boundary
Page 75

Barracuda 180 Product Manual, Rev. C 65
10.0 Seagate Technology support services Online Services
Internet
www.seagate.com for information about Seagate products and services. Worldwide support is available 24
hours daily by e-mail for your disc or tape questions.
Presales Support:
Disc: www.seagate.com/support/email/email_presales.html
Tape: www.seagate.com/support/email/email_tape_presales.html
Technical Support:
Disc: www.seagate.com/support/email/email_disc_support.htmlorDiscSupport@Seagate.com.
Tape: www.seagate.com/support/email/email_tape_support.html
Server Appliance: www.seagate.com/support/email/email_nas_support.html
Reseller Marketplace
Reseller Marketplace is the storage industry’s first collaborative, e-commerce marketplace offering resellers
the fastest, most efficient online purchasing process for Seagate storage solutions. The Reseller Marketplace
at marketplace.seagate.com, an exclusive service for US resellers participating in the Seagate Partner Program (SPP), is designed to streamline the purchasing process of Seagate solutions and provide unprecedented value to Seagate’s resellers through real-time pricing and availability, fast and easy comparison
shopping, and seamless integration with key distributors for a one-stop shopping experience.
or
DiscPresales@Seagate.com.
or
Tape_Sales_Support@Seagate.com.
or
TapeSupport@Seagate.com.
or
NAS_Support@Seagate.com.
For support, questions and comments: reseller.seagate.com/benefits/T1.html or 1-877-271-3285 (toll-free) 9
A.M
.to7P.M. (eastern time) Monday through Friday.
Tape Purchases
US customers can purchase Seagate data cartridges, tape supplies, accessories, and select Seagate tape
drive products 24 hours daily at buytape.seagate.com.
®
SeaBOARD
products and is available 24 hours daily. Set your communications software to eight data bits, no parity and one
stop bit (8-N-1).
is a computer bulletin board system that contains information about Seagate disc and tape drive
Automated Services
SeaFONE®(1-800-SEAGATE) is Seagate’s toll-free number (1-800-732-4283) to access our automated self-
help services. Using a touch-tone phone, you can find answers to service phone numbers, commonly asked
questions, troubleshooting tips and specifications for disc drives and tape drives 24 hours daily . International
callers can reach this service by dialing +1-405-936-1234.
®
SeaFAX
support information by return FAX 24 hours daily. This service is available worldwide.
is Seagate’s automated FAX delivery system. Using a touch-tone phone, you can obtain technical
Presales Support
Presales Support
Our Presales Support staff can help you determine which Seagate products are best suited for your specific
application or computer system.
Page 76

66 Barracuda 1 80 Product Manual, Rev. C
Technical Support
If you need help installing your drive, consult your dealer. Dealersare familiar with their unique system configurations and can help you with system conflicts and other technical issues. If you need additional help, you can
talk to a Seagate technical support specialist. Before calling, note your system configuration and drive model
number (ST####).
SeaTDD™ (+1-405-936-1687) is a telecommunications device for the deaf (TDD). You can send questions or
comments 24 hours daily and exchange messages with a technical support specialist from 8:00
11:45 A
.M. and 1:00P.M.to6:00P.M. (central time) Monday through Friday.
A.M
.to
Customer Service (CSO)
Warranty Service
Seagate offers worldwide customer support for Seagate drives. Seagate direct OEM, Distribution and System
Integrator customers should contact their Seagate service center representative for warranty information.
Other customers should contact their place of purchase.
Authorized Service Centers
If you live outside the US, you can contact an Authorized Service Center for service.
USA/Canada/Latin America Support Services
Presales Support
Call Center Toll-free Direct dial FAX
Disc:
Tape:
Server Appliance:
1-877-271-3285 +405-936-1210 +1-405-936-1683
1-800-626-6637 +1-714-641-2500 +1-714-641-2410
1-800-732-4283 +1-405-936-1234 +1-405-936-1683
Technical Support (SeaFONE)
1-800-SEAGATE or +1-405-936-1234 (for specific product phone number)
FAX:
Disc:
+1-405-936-1685;
SeaFAX 1-800-SEAGATE
SeaTDD +1-405-936-1687
SeaBOARD
Tape and Server Appliance:
Disc:
+1-405-936-1600;
Tape:
+1-405-936-1683
+1-405-936-1630
Warranty Service
Call Center Toll-free Direct dial FAX / Internet
USA 1-800-468-3472 +1-405-936-1456 +1-405-936-1462
Mexico and Latin America — +1-405-936-1456 +1-405-936-1464
Canada
Memofix
Adtech*
Brazil
MA Centro de Serviços*
* 1-800-636-6349 +1-905-660-4936 or +1-905-660-4951
www.memofix.com
1-800-624-9857 +1-905-812-8099 or +1-905-812-7807
www.adtech1.com
— +55-21-509-7267 +55-21-507-6672
e-mail: sgt_cso@gbl.com.br
*Authorized Service Centers
Page 77

Barracuda 180 Product Manual, Rev. C 67
European Support Services
For European customer support, dial the toll-free number for your specific country for presales support, technical support, SeaFAX and warranty service.
If your country is not listed here, dial our European call center at +31-20-316-7222 from 8:30
(European central time) Monday through Friday. The European call center is located in Amsterdam, The Netherlands.
Call Center
Austria 0800-201290
Belgium 0 800-74 876
Denmark 80881266
France 0 800-90 90 52
Germany 0 800-182 6831
Ireland 1 800-55 21 22
Italy 800-790695
Netherlands 0 800-732 4283
Norway 800-113 91
Poland 00 800-311 12 38
Spain 900-98 31 24
Sweden 0 207 90 073
Switzerland 0800-838411
Turkey 00 800-31 92 91 40
United Kingdom 0 800-783 5177
A.M
.to5:00P.M.
SeaBOARD
Germany +49-89-1409331
Fax Services—All European Countries
Presales/Technical Support/Warranty Service 31-20-653-3513
Africa/Middle East Support Services
For presales, technical support, warranty service and FAX services in Africa and the Middle East, dial our
European call center at +31-20-316-7222 from 8:30 A
Friday, or send a FAX to +31-20-653-3513. The European call center is located in Amsterdam, The Netherlands.
.M.to5:00P.M. (European central time) Monday through
Asia/Pacific Support Services
For Asia/Pacific presales and technical support, dial the toll-free number for your specific country. The Asia/
Pacific toll-free numbers are available from 6:00 A
ern time) Monday through Friday. If your country is not listed here, direct dial one of our technical support locations.
Call Center Toll-free Direct dial FAX
Australia 1800-14-7201 ——
China ——+86-10-6871-4316
Hong Kong 800-90-0474 — +852-2368 7173
Indonesia 001-803-1-003-2165 ——
Japan ——+81-3-5462-2979
Malaysia 1-800-80-2335 ——
New Zealand 0800-443988 ——
Singapore 800-1101-150 +65-488-7584 +65-488-7528
Taiwan — +886-2-2514-2237 +886-2-2715-2923
Thailand 001-800-11-0032165 ——
.M.to10:45A.M. and 12:00P.M.to6:00P.M. (Australian east-
Page 78

68 Barracuda 1 80 Product Manual, Rev. C
Warranty Service
Call Center Toll-free Direct dial FAX
Asia/Pacific — +65-485-3595 +65-488-7503
Australia 1800-12-9277 ——
Japan — +81-3-5462-2904 +81-3-5462-2979
Page 79

Barracuda 180 Product Manual, Rev. C 69
9
Index
bytes/surface
bytes/track
9
Symbols
+5 and +12 volt supplies 21
Numerics
68 conductor connector 52
68-pin connector
80 conductor connector
80 conductor interface
80 pin connector option
80 pin I/O connector
53
58,
52
52
52
59
A
AC power 21
access time
accessories
acoustics
activity indicator
activity LED
actuator
actuator assembly
address
air cleanliness
air flow
air inlet
altitude
altitudeand atmospheric pressure
ambient
ambient temperature
ANSI SCSI documents
arbitration priority
asynchronous interface transfer rate
audible noise
Australia/New Zealand Standard
automatic retry
automatic shipping lock
average idle current
average latency
average rotational latency
25,
suggested
7,
10
38
26
25
28
9
8
64
38
38
60
5
28
38
25,
53
3
38
4
13
5
21
7
10
9,
B
background processing 7
backward compatibility
bits/inch
buffer
buffer segment
buffer-full
buffer-full ratio
bulkhead connector
bus device reset message
bus fairness
bytes per sector
9
10, 11,
11
7
11,
11
12
44
5
12
51
46
C
cabinet cooling 38
cable
cache
cache buffer
cache miss
cache mode
cache operation
cache operation hit
cache segment
caching write data
Canadian Department of Communications
capacities
capacity, drive, programmable
case temperature
CE Marking
changeable bit
changeable value
check condition
circuits
class B limit
command
command descriptor block (CDB)
command queuing
condensation
conducted noise immunity
connect/disconnect
25
64
4
connector
connector contact
consecutive read operation
contiguous blocks of data
continuous vibration
controller
controller overhead
controller self test
cooling
C-Tick Marking
current
current limiting
current profile
current profile (LVD mode)
current profile (SE mode)
current requirements
current value
cylinder boundary
49
10, 11,
11
8
61
10,
49
10
38
22
46,
3
3
7
10
25
22
11
47
42
3
22
12
10
46
12
11
3
8
25
46
10
7
12
23
22
12
23
60
22
12
47
10
9
21,
28
21
D
daisy-chain 22, 51, 53
80 conductor
data correction
data transfer period
data transfer protocol
data transfer rate
DC cable and connector
52
13
49
7
9
49
Page 80

70 Barracuda 180 Product Manual, Rev. C
DC current 51
DC power
DC power carrying conductor
DC power connector
DC power requirements
DC power source
dedicated landing zone
default
default mode parameter
default value
defect/error management
delayed motor start option
delayed start
depot repair
depot repair philosophy
diagnostics
differential I/O circuit
differentiating features
dimensions
disable read ahead
disc access
disc media
disc rotational speed
disconnect/reconnect
discontinuity (DISC) bit
DRA bit
drive
drive activity
drive activity LED
drive capacity
drive default mode parameter
drive failure
drive firmware
drive ID
drive ID select jumper connector
drive ID/option select header
drive interface connector
drive internal
drive internal defects and errors
drive malfunction
drive mounting
drive orientation
drive power
drive primary defects list
drive SCSI timing
drive select header
drive self test
drive spindle
drive transfer
drive volume
drive warranty
DST.
dynamic spindle brake
10, 13, 37,
36,
37
46,
37
15
22
29
10
9
control
specification
programmable
28
11
12
60
9
14
46
33
22
29,
constraints
33
7,
37
11
33
15
See
drive self test
13
52
47
11
64
14
38
63
17
8
49
12
49
37
39
9
11
5
7
21
5
33
21,
15
12
52
31
49
31
52
33
33
60
31
33
E
ECC 13
ECC correction capability
electrical characteristics
electromagnetic compatibility
electromagnetic interference (EMI)
electromagnetic susceptibility
embedded servo
EMC compliance
EMI requirements
environment
environmental control
environmental interference
environmental limits
environmental requirements
EPROM
equipment malfunction
error
error management system
error rate
error rate calculation
error recovery
ETF defect list
European Union requirements
EVPD bit
execution time
extended messages
46
13
13
45
7
3
3
38
31
31
10
25
13
41
7
49,
28
13
32
13
13
60
3
28
3
F
fairness 7
fault status
FCC rules and regulations
field repair
firmware
flat ribbon cable
flaw reallocation
format
format command
format time
formatted
formatting
front panel
front panel LED
FSW function
13
3
15
46
60
10
44
9
10
8
33
29
60
47
G
GMR heads 5
gradient
ground return
grounding
25
21
39
H
hard reset 46
hardware error
HDA
5, 15, 38,
13
39
13
Page 81

Barracuda 180 Product Manual, Rev. C 71
head and disc assembly.
heat removal
heat source
high level format
host
12, 31, 37, 44, 51,
host adapter
adapter/initiator
host backplane wiring
host equipment
DC power
host I/O signal
host system
host system malfunction
host/drive operational interface
hot plug
humidity
7,
38
38
33
33
39,
52
33
33
15
25
See
HDA
53
53
51
52
13
13
I
I/O connector 51
identified defect
idle condition
Input characteristics
inquiry command
inquiry vital product data
installation
installation guide
installationinstructions
instantaneous current peak
integrated Ultra160 SCSI controller
interface cable length
interface data
interface requirements
interface timing
internal data rate
33
31
24
61
45
45
8
33
21
7
53
9
41
13
9
J
J1-auxiliary 33
jumper
jumper function description
jumper header
jumper plug type
8, 33, 36, 37,
36
33
60
37
K
Korean certification 4
L
landing zone 7
LB
11
LED
64
logical
logical block
logical characteristics
logical segment (mode select page 08h)
low level format
low voltagedifferential(LVD) drivers and receivers
LVD
10
10, 11,
33
61
12
49
10
LVD interface receiver circuits
LVD output signals
61
61
M
magnetoresistive heads 5
mating connector
mating flat cable connector
maximum current requirements
maximum operating current
maximum starting current
ME jumper
mean time between failure.
media
7,
media defect
media defect induced error
medium error
message protocol
message protocol system
messages
SCSI interface
miscellaneous features
mode page 01
mode page 08h
mode parameter
page 08h
mode select command
mode select page 08h
mode sense command
mode sense command page 08h
mode sense data
mode sense value
model number table
motor start command
motor start delay option
motor start option
mounting configuration
mounting configuration dimensions
mounting constraints
mounting point
mounting surface
mounting surface distortion
mounting surface stiffness
MTBF
13, 14,
multimode drivers and receivers
multiple segment
multi-segmented cache control
49,
37
46
13
13
46
12
39
52
49
41
48
10
46
10,
12
46,
46
46
5
10
60
10, 21,
29
13,
39
25
11
21
See
32
39
39
52
21
13
39
46
47
60
22
MTBF
7
10
11
29,
30
N
noise 22
audible
non-operating
temperature
non-operating vibration
nonshielded 68 conductor connector
7
3
25, 26,
25
28
28
52
Page 82

72 Barracuda 180 Product Manual, Rev. C
12
10
46
3
11
7
12
10
10, 11,
13
13,
11
9
21
33
15
26
11
46,
42
41
33
60
10,
45
31
61
25
19
49
47
48
7
31
31
4
14
12
13,
12
32
27
13
13
32
14
52
13
48
12
15
8
10
5
9
O
office environment 28
operating
operating environment
operating option
operating parameter
operator intervention
option jumper
option jumper location
option select header
option select jumper
options
orientation
out-of-plane deflection
out-of-plane distortion
Output characteristics
25, 26,
8
10, 26,
33
33
28
14
46
13
33
49
33
38
39
39
61
P
package size 26
package test specification
packaged
parity
parity checking
parity error
partition or logical drive
PCB
PCBA
PCBA circuit run
PD jumper
peak bits/inch
peak starting current
performance characteristics
performance degradation
peripheral I/O cable
physical buffer space
physical characteristics
physical damage
physical interface
physically contiguous blocks of data
power
power connector
power control switch
power dissipation
power distribution
power sequencing
power supply voltage
power-carrying conductor
power-on
power-on operating hours
power-on reset
power-up
power-up hours
prefetch
prefetch (read look-ahead)
prefetch ceiling field
prefetch data
26
37
37
37
15
33, 36, 39, 46, 49, 51,
51
37
9
28
49,
21, 22,
37
21,
24
3
22
33,
22,
10, 11,
60
46
37
14
12
12
22
12
21
10
10
22
13
33
49
50
4
9
26
52
14
10,
12
prefetch field
prefetch hit
prefetch mode
prefetch of contiguous blocks
prefetch operation
prefetch segmented cache control
preventive maintenance
PRML read channel electronics
product data page
programmable drive capacity
R
radio interference regulations 3
read
read command
read data
read error
read error rate
read operation
read retry count
read/write head
ready
receive diagnostic results
receiver circuits
recommended mounting
recoverable seek error
53
12
reference documents
regulation
relative humidity
reliability
reliability and service
reliability specifications
remote switch
repair facility
repair information
REQ/ACK offset
request sense command
request sense information
resonance
retrieved data
S
S.M.A.R.T. 7, 16
safe power transmission
safety
saved value
SCSI
commands
format commands
interface data transfer rate
messages
SCSI bus cable
SCSI bus condition
SCSI bus fairness
SCSI bus ID
SCSI bus phase sequence
SCSI command
Page 83

Barracuda 180 Product Manual, Rev. C 73
SCSI I/O connector 50
SCSI ID
SCSI interface
SCSI interface cable
SCSI interface commands supported
SCSI interface connector
SCSI interface data
SCSI Interface Product Manual
SCSI systems error
SCSI systems error consideration
SCSI systems error management
SCSI-1 mode
SE
Seagate support service
sector
sector interleave
sector size
sector sizes
seek error
seek positioning error
segment
self-contained
Self-Monitoring Analysis and Reporting Technology.
SE-LVD alternative
sense key
sequential read operations
service
servo data
shielding
shipping
shipping container
shock
shock mount
signal ground
single unit shipping pack
single-ended (SE) drivers and receivers
single-ended interface circuit
site installation
software interleave
spare part
spindle
spindle startup
standard day
standards
start motor command
startunitcommand
start/stop time
status
stop spindle
stop time
storage capacity
straight-in connector
strict bit in Mode page 00h
33,
60
11
See S.M.A.R.T.
life
13,
philosophy
tools
26
and vibration
32
8
13
10,
13
15
5
3
19
15
22
3
10
37
10, 13,
42
9
10
11
11
15
15
25
26
39
39
15
37
25
10
10
31
12
9
32
61
37
51
53
13
21
51
42
49
31
32
5
7
3, 4,
33
12
8
24
11
supply voltage
support services
synchronous data transfer
synchronous data transfer operation
synchronous data transfer period
synchronous transfer period
system chassis
system recovery procedures
21
65
49
64
39
13
T
Taiwan certification 4
technical support services
temperature
ambient
gradient
non-operating
regulation
See also
termination
terminator enable jumper TE
terminator power
terminator requirements
TP1 position
tracks/inch
tracks/surface, total
transfer period
transmitter receiver circuits
typical access time
10, 25,
25
25
3
cooling
22
37
9
49
62
25
10
9
38
33,
65
53
62
61
U
Ultra160 47
Ultra160 mode
Ultra160 SCSI
Ultra160 SCSI controller
Ultra160 SCSI interface
unformatted
unrecoverable condition
unrecoverable error
unrecoverable seek error
Unrecoverable write error
42
5
7
7
5,
8
13
13
14
13
V
vibration 26, 28
vital product data
volatile memory
voltage
10,
21
45
46
W
warranty 7, 18
wet bulb temperature
wide Ultra160 SCSI interface
WP jumper
wrap-around
write caching
write error
unrecoverable
37
11
11
13
25
5
13
49
64
Page 84

74 Barracuda 180 Product Manual, Rev. C
write operation 11
write protect
write retry count
37
31
Z
zoned bit recording (ZBR) 7
Page 85

Page 86

Seagate Technology LLC
920 Disc Drive, Scotts Valley, California 95066-4544, USA
Publication Number: 100109939, Rev. C, Printed in USA
 Loading...
Loading...