

Page 1

LXM32A
交流伺服驱动装置
产品手册
V1.01, 09.2009
0198441113759, V1.01, 09.2009
www.schneider-electric.com
Page 2
重要说明 LXM32A
重要说明
本手册属于产品的一部分。
请仔细阅读本手册,并遵照其中的说明。
请保管好本手册。
请务必向每位产品用户提供本手册及所有与产品有关的文件。
请仔细阅读并注意所有安全提示及 " 开始之前 — 安全信息 " 一章。
并非所有产品在所有国家或地区都有供应。
有关产品的供应状况,请查阅最新的产品目录。
保留如有技术内容修改而不另行通知的权利。
所有说明均为供参考的技术参数,并非所许诺的产品特性。
大多数未带有任何专用商标的产品名称也应视为其各自所有者的商标。
2 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 3
LXM32A 目录
目录
重要说明 . . . . . . . . . . . . . . . . . . . . . . . . . 2
目录 . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
关于本手册 . . . . . . . . . . . . . . . . . . . . . . . . 9
其它参考文献 . . . . . . . . . . . . . . . . . . . . . . 10
1 序言 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.1 设备概述 . . . . . . . . . . . . . . . . . . . . 11
1.2 组件与接口 . . . . . . . . . . . . . . . . . . . 12
1.3 型号代码 . . . . . . . . . . . . . . . . . . . . 13
2 开始之前 - 安全信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.1 操作人员资质 . . . . . . . . . . . . . . . . . . 15
2.2 指定用途 . . . . . . . . . . . . . . . . . . . . 15
2.3 危险等级 . . . . . . . . . . . . . . . . . . . . 16
2.4 基本信息 . . . . . . . . . . . . . . . . . . . . 17
2.5 DC 总线电压测量 . . . . . . . . . . . . . . . . 18
2.6 安全功能 . . . . . . . . . . . . . . . . . . . . 18
2.7 标准和术语 . . . . . . . . . . . . . . . . . . . 19
3 技术参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1 环境条件 . . . . . . . . . . . . . . . . . . . . 21
3.2 机械参数 . . . . . . . . . . . . . . . . . . . . 23
3.2.1 尺寸图 . . . . . . . . . . . . . . . . . . . . 23
3.3 电气参数 . . . . . . . . . . . . . . . . . . . . 25
3.3.1 输出级 . . . . . . . . . . . . . . . . . . . . 25
3.3.2 24VDC 控制系统电源 . . . . . . . . . . . . . . 31
3.3.3 信号 . . . . . . . . . . . . . . . . . . . . . 32
3.3.4 安全功能 . . . . . . . . . . . . . . . . . . . 33
3.3.5 制动电阻 . . . . . . . . . . . . . . . . . . . 34
3.3.6 内部电源滤波器 . . . . . . . . . . . . . . . . 36
3.3.7 电源滤波器 (配件) . . . . . . . . . . . . . 37
3.3.8 电源扼流圈 (配件). . . . . . . . . . . . . . 38
3.4 要求:UL 508C . . . . . . . . . . . . . . . . . 39
3.5 认证 . . . . . . . . . . . . . . . . . . . . . . 39
3.6 一致性声明 . . . . . . . . . . . . . . . . . . . 40
0198441113759, V1.01, 09.2009
交流伺服驱动装置 3
Page 4

目录 LXM32A
3.7 功能安全性认证证书. . . . . . . . . . . . . . . 41
4 基础知识 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.1 安全功能. . . . . . . . . . . . . . . . . . . . 43
5 设计 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.1 电磁兼容性 (EMC) . . . . . . . . . . . . . . . . 46
5.2 电缆. . . . . . . . . . . . . . . . . . . . . . 49
5.2.1 所需电缆一览表 . . . . . . . . . . . . . . . 50
5.3 剩余电流动作保护器. . . . . . . . . . . . . . . 51
5.4 在 IT 网络中使用. . . . . . . . . . . . . . . . 51
5.5 DC 总线并联连接 . . . . . . . . . . . . . . . . 52
5.6 电源扼流圈. . . . . . . . . . . . . . . . . . . 53
5.7 电源滤波器. . . . . . . . . . . . . . . . . . . 54
5.7.1 关闭 Y 电容器 . . . . . . . . . . . . . . . . 55
5.8 确定制动电阻参数. . . . . . . . . . . . . . . . 56
5.8.1 内部制动电阻 . . . . . . . . . . . . . . . . 56
5.8.2 外接制动电阻 . . . . . . . . . . . . . . . . 56
5.8.3 参数选择帮助 . . . . . . . . . . . . . . . . 57
5.9 STO 安全功能 ("Safe Torque Off"). . . . . . . . 61
5.9.1 定义 . . . . . . . . . . . . . . . . . . . . 61
5.9.2 功能 . . . . . . . . . . . . . . . . . . . . 61
5.9.3 关于使用安全功能的要求 . . . . . . . . . . . 61
5.9.4 STO 应用示例 . . . . . . . . . . . . . . . . 63
5.10 逻辑类型. . . . . . . . . . . . . . . . . . . . 64
5.11 监控功能. . . . . . . . . . . . . . . . . . . . 65
5.12 可配置的输入和输出. . . . . . . . . . . . . . . 65
5.13 CAN 现场总线的连接. . . . . . . . . . . . . . . 66
6 安装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.1 机械安装. . . . . . . . . . . . . . . . . . . . 67
6.1.1 设备装配 . . . . . . . . . . . . . . . . . . 68
6.1.2 安装电源滤波器、电源扼流圈和制动电阻 . . . . 70
6.2 电气安装. . . . . . . . . . . . . . . . . . . . 71
6.2.1 安装程序概况 . . . . . . . . . . . . . . . . 72
6.2.2 连接概况 . . . . . . . . . . . . . . . . . . 73
6.2.3 连接接地螺钉 . . . . . . . . . . . . . . . . 74
6.2.4 电机相位连接 (CN10,电机) . . . . . . . . . 75
6.2.5 止动闸连接 (CN11,闸) . . . . . . . . . . . 79
6.2.6 DC 总线连接 (CN9,DC 总线). . . . . . . . . 80
6.2.7 制动电阻连接 (CN8,Braking Resistor). . . . 81
6.2.8 连接输出级电源 (CN1) . . . . . . . . . . . . 83
6.2.9 电机编码器连接 (CN3) . . . . . . . . . . . . 87
6.2.10 连接控制系统电源和 STO (CN2、DC 电源和 STO) 88
6.2.11 数字输入 / 输出 (CN6) 端口 . . . . . . . . . . 91
4 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 5

LXM32A 目录
6.2.12 连接装有调试软件的 PC (CN7) . . . . . . . . . 93
6.2.13 CAN 连接 (CN4 和 CN5). . . . . . . . . . . . 94
6.3 检查安装情况 . . . . . . . . . . . . . . . . . . 97
7 调试 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
7.1 基本信息 . . . . . . . . . . . . . . . . . . . . 99
7.2 概述 . . . . . . . . . . . . . . . . . . . . . 101
7.2.1 调试步骤 . . . . . . . . . . . . . . . . . . 101
7.2.2 调试工具 . . . . . . . . . . . . . . . . . . 101
7.3 集成的 HMI . . . . . . . . . . . . . . . . . . 102
7.3.1 显示和操作 . . . . . . . . . . . . . . . . . 103
7.3.2 菜单结构 . . . . . . . . . . . . . . . . . . 104
7.3.3 进行设置 . . . . . . . . . . . . . . . . . . 105
7.4 调试软件 . . . . . . . . . . . . . . . . . . . 106
7.5 调试步骤 . . . . . . . . . . . . . . . . . . . 107
7.5.1 " 首次设置 " . . . . . . . . . . . . . . . . 107
7.5.2 运行状态 (状态图). . . . . . . . . . . . . 109
7.5.3 设置主要参数和极限值 . . . . . . . . . . . . 110
7.5.4 数字输入 / 输出 . . . . . . . . . . . . . . . 113
7.5.5 限位开关信号检测 . . . . . . . . . . . . . . 115
7.5.6 测试 STO 安全功能 . . . . . . . . . . . . . 116
7.5.7 止动闸 . . . . . . . . . . . . . . . . . . . 117
7.5.8 转动方向检查 . . . . . . . . . . . . . . . . 119
7.5.9 编码器参数值设置 . . . . . . . . . . . . . . 120
7.5.10 设置制动电阻的参数 . . . . . . . . . . . . . 123
7.5.11 执行自动调整 . . . . . . . . . . . . . . . . 125
7.5.12 自动调整功能的高级设置 . . . . . . . . . . . 127
7.6 利用阶跃响应优化控制器 . . . . . . . . . . . . 129
7.6.1 控制器结构 . . . . . . . . . . . . . . . . . 129
7.6.2 优化 . . . . . . . . . . . . . . . . . . . . 130
7.6.3 优化转速控制器 . . . . . . . . . . . . . . . 131
7.6.4 检查及优化默认设置 . . . . . . . . . . . . . 135
7.6.5 优化位置控制器 . . . . . . . . . . . . . . . 136
7.7 存储卡 (Memory-Card) . . . . . . . . . . . . . 138
7.7.1 用存储卡进行数据交换 . . . . . . . . . . . . 139
7.8 复制当前设备设置 . . . . . . . . . . . . . . . 140
8 运行 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
8.1 访问通道 . . . . . . . . . . . . . . . . . . . 142
8.2 运行状态 . . . . . . . . . . . . . . . . . . . 144
8.2.1 状态图 . . . . . . . . . . . . . . . . . . . 144
8.2.2 状态转变 . . . . . . . . . . . . . . . . . . 146
8.2.3 显示运行状态 . . . . . . . . . . . . . . . . 147
8.2.4 转变运行状态 . . . . . . . . . . . . . . . . 148
8.3 运行模式 . . . . . . . . . . . . . . . . . . . 149
8.3.1 启动和转换运行模式 . . . . . . . . . . . . . 149
8.3.2 运行模式 Jog . . . . . . . . . . . . . . . . 149
0198441113759, V1.01, 09.2009
交流伺服驱动装置 5
Page 6

目录 LXM32A
8.3.3 运行模式 Profile Torque . . . . . . . . . . . 153
8.3.4 运行模式 Profile Velocity . . . . . . . . . . 155
8.3.5 运行模式 Profile Position . . . . . . . . . . 157
8.3.6 运行模式基准点定位 . . . . . . . . . . . . . 160
8.4 功能. . . . . . . . . . . . . . . . . . . . . . 170
8.4.1 运动方向的配置 . . . . . . . . . . . . . . . 170
8.4.2 比例配置 . . . . . . . . . . . . . . . . . . 171
8.4.3 数字信号输入和输出的配置 . . . . . . . . . . 175
8.4.4 比例的配置 . . . . . . . . . . . . . . . . . 181
8.4.5 设备内部信号监控的功能 . . . . . . . . . . . 196
8.4.6 目标值处理功能 . . . . . . . . . . . . . . . 205
8.4.7 运动监控的功能 . . . . . . . . . . . . . . . 214
9 示例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
9.1 一般提示. . . . . . . . . . . . . . . . . . . . 233
9.2 现场总线操作的示例. . . . . . . . . . . . . . . 234
10 诊断与排除故障 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
10.1 状态查询 / 状态显示. . . . . . . . . . . . . . . 235
10.1.1 通过集成的 HMI 诊断 . . . . . . . . . . . . . 236
10.1.2 通过调试软件诊断 . . . . . . . . . . . . . . 237
10.1.3 通过现场总线诊断 . . . . . . . . . . . . . . 237
10.1.4 现场总线状态 LED. . . . . . . . . . . . . . . 239
10.2 故障存储器. . . . . . . . . . . . . . . . . . . 240
10.2.1 通过现场总线读取故障存储器 . . . . . . . . . 240
10.2.2 通过调试软件读取故障存储器 . . . . . . . . . 242
10.3 集成的 HMI 上的特别菜单. . . . . . . . . . . . . 243
10.3.1 读取和确认警告 . . . . . . . . . . . . . . . 243
10.3.2 读取和确认故障 . . . . . . . . . . . . . . . 244
10.3.3 确认电机的更换 . . . . . . . . . . . . . . . 245
10.4 诊断与故障查找. . . . . . . . . . . . . . . . . 245
10.4.1 按照故障位分类的警告和故障 . . . . . . . . . 245
10.4.2 警告和故障表 . . . . . . . . . . . . . . . . 248
11 参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259
11.1 参数显示. . . . . . . . . . . . . . . . . . . . 259
11.1.1 现场总线的小数处理 . . . . . . . . . . . . . 260
11.2 参数列表. . . . . . . . . . . . . . . . . . . . 261
12 附件与备件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
12.1 调试工具. . . . . . . . . . . . . . . . . . . . 311
12.2 存储卡. . . . . . . . . . . . . . . . . . . . . 311
12.3 应用铭牌. . . . . . . . . . . . . . . . . . . . 311
12.4 带插头的 CANopen 电缆 . . . . . . . . . . . . . 311
12.5 CANopen 插头、分配器、终端电阻. . . . . . . . . 312
12.6 CANopen 电缆. . . . . . . . . . . . . . . . . . 312
6 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 7

LXM32A 目录
12.7 适用于编码器信号 LXM05/LXM15 到 LXM32
的适配器电缆 . . . . . . . . . . . . . . . . . 313
12.8 PTO 和 PTI 电缆 . . . . . . . . . . . . . . . 313
12.9 电机电缆 . . . . . . . . . . . . . . . . . . . 313
12.9.1 电机电缆,1.5 mm2 . . . . . . . . . . . . . 313
12.9.2 电机电缆,2.5 mm2 . . . . . . . . . . . . . 314
12.9.3 电机电缆,4 mm2 . . . . . . . . . . . . . . 314
12.10 编码器电缆 . . . . . . . . . . . . . . . . . . 315
12.11 插头 . . . . . . . . . . . . . . . . . . . . . 315
12.12 外部制动电阻 . . . . . . . . . . . . . . . . . 316
12.13 配件 DC 总线 . . . . . . . . . . . . . . . . . 316
12.14 电源扼流圈 . . . . . . . . . . . . . . . . . . 316
12.15 外部电源滤波器 . . . . . . . . . . . . . . . . 317
12.16 备件、插头、风扇、盖板 . . . . . . . . . . . . 317
13 售后服务、维护与废弃物处理 . . . . . . . . . . . . . . . . . . . . . . . . . . 319
13.1 售后服务地址 . . . . . . . . . . . . . . . . . 319
13.2 维护 . . . . . . . . . . . . . . . . . . . . . 319
13.2.1 安全功能 STO 的使用寿命 . . . . . . . . . . 319
13.3 更换设备 . . . . . . . . . . . . . . . . . . . 320
13.4 更换电机 . . . . . . . . . . . . . . . . . . . 321
13.5 发运、仓储、废弃物处理 . . . . . . . . . . . . 322
14 术语表 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323
14.1 单位及其换算表 . . . . . . . . . . . . . . . . 323
14.1.1 长度 . . . . . . . . . . . . . . . . . . . . 323
14.1.2 质量 . . . . . . . . . . . . . . . . . . . . 323
14.1.3 力 . . . . . . . . . . . . . . . . . . . . . 323
14.1.4 功率 . . . . . . . . . . . . . . . . . . . . 323
14.1.5 转动 . . . . . . . . . . . . . . . . . . . . 324
14.1.6 转矩 . . . . . . . . . . . . . . . . . . . . 324
14.1.7 转动惯量 . . . . . . . . . . . . . . . . . . 324
14.1.8 温度 . . . . . . . . . . . . . . . . . . . . 324
14.1.9 导线横截面 . . . . . . . . . . . . . . . . . 324
14.2 术语和缩写 . . . . . . . . . . . . . . . . . . 325
0198441113759, V1.01, 09.2009
交流伺服驱动装置 7
Page 8

目录 LXM32A
8 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 9
LXM32A 关于本手册
关于本手册
本手册适用于所有 LXM32A 标准产品。1 " 序言 " 一章中列有本产品的型
号。您可以根据型号确定您的产品是标准产品还是用户定制产品。
本产品附带有以下手册:
• 产品手册,所描述的是技术参数、安装、调试,以及运行模式和功
能。
• 电机手册,所描述的是电机的技术特性,包括安装与调试要求。
手册来源
可在以下网站下载最新手册:
http://www.schneider-electric.com
EPLAN macros 来源
更正和建议
操作步骤
操作帮助
为了简化项目,在下列互连联网地址上备有宏文件和文章原始数据以供
下载:
http://www.schneider-electric.com
我们一如既往努力提升我们的服务。因此,欢迎您对本手册提出建议和
更正意见。
可以通过以下电子邮件地址与我们联系:
techcomm@schneider-electric.com
当必须按照先后顺序执行操作步骤时,您可看见以下表示方法:
쮿 执行后续操作步骤的必备条件
왘 操作步骤 1
컅 对该操作步骤的重要反应
왘 操作步骤 2
当针对某一操作步骤的反应有所说明时,您就能够以此来检查该操作步
骤的执行是否正确。
如果没有其它说明,就必须以指定的顺序执行各个操作步骤。
点击该符号可打开有关操作帮助的说明:
。
可以在这里获取帮助操作的辅助信息。
参数表达法
SI 单位
反转信号
逻辑类型
0198441113759, V1.01, 09.2009
交流伺服驱动装置 9
文中参数使用参数名称指代,例如 _IO_act。表格表达法在参数一章
中有所说明。参数列表根据参数名称以字母顺序排列。
SI 单位是原始值。换算后的单位放在原始值后的括号里,并且可以取
整数。
示例 :
最小导线横截面积:1.5 mm
反转信号用横线标记,例如 STO_A 或 STO_B。
本产品支持逻辑类型 1 和逻辑类型 2 数字信号。请注意,接线示例主
要针对逻辑类型 1 进行说明。STO 安全功能必须按逻辑类型 1 的方法
进行布线。
2
(AWG 14)
Page 10

关于本手册 LXM32A
关键字索引
其它参考文献
术语表
技术词语及缩写符号解释。
指引相应目录的关键词表。
我们建议阅读下列文献来深化知识:
• Ellis, George: Control System Design Guide. Academic Press
• Kuo, Benjamin; Golnaraghi, Farid: Automatic Control Systems.
John Wiley & Sons
10 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 11
LXM32A 1 序言
1序言
1
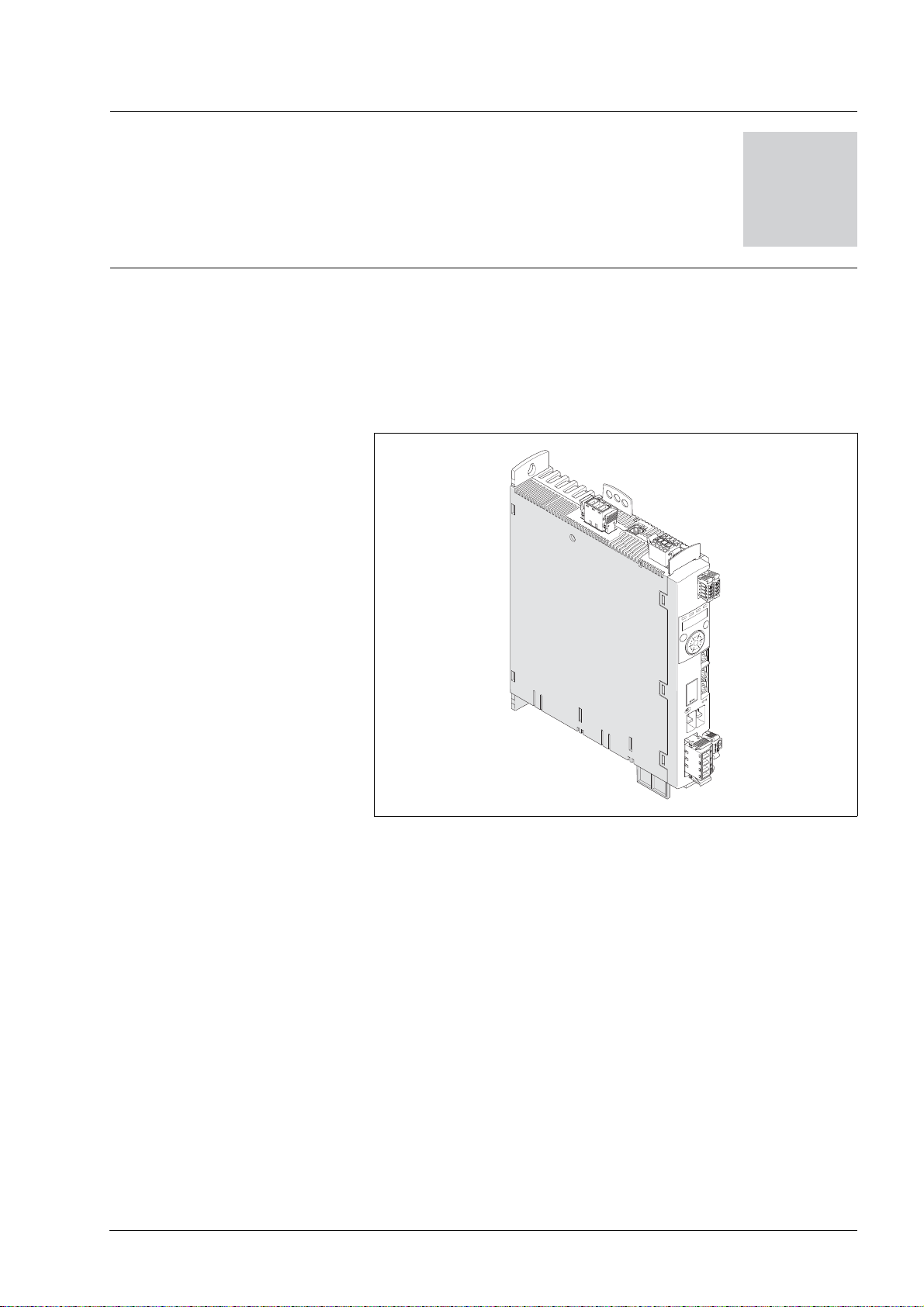
1.1 设备概述
Lexium 32 产品系列包括三种可用于不同应用领域的交流伺服驱动装
置。Lexium 伺服电机 BMH 或 BSH 产品系列,以及齐全的备选配件实现
了具备各种驱动功率的高性能伺服驱动解决方案。
Lexium LXM32A 交流伺服驱动装置
本产品手册描述了 LXM32A 交流伺服驱动装置。
LXM32A 交流伺服驱动装置的特点概述如下:
• CANopen 和 CANmotion 通信界面,通过该界面可设置各种运行模式
的给定值。
• 通过集成化 HMI (装有调试软件的 PC 或现场总线)进行调试。
• 储存卡插槽可实现简便的参数复制和仪器更换。
• 具有 IEC 61800-5-2 规定的 "Safe Torque Off" (STO) 标准安全功
能。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 11
Page 12
1 序言 LXM32A
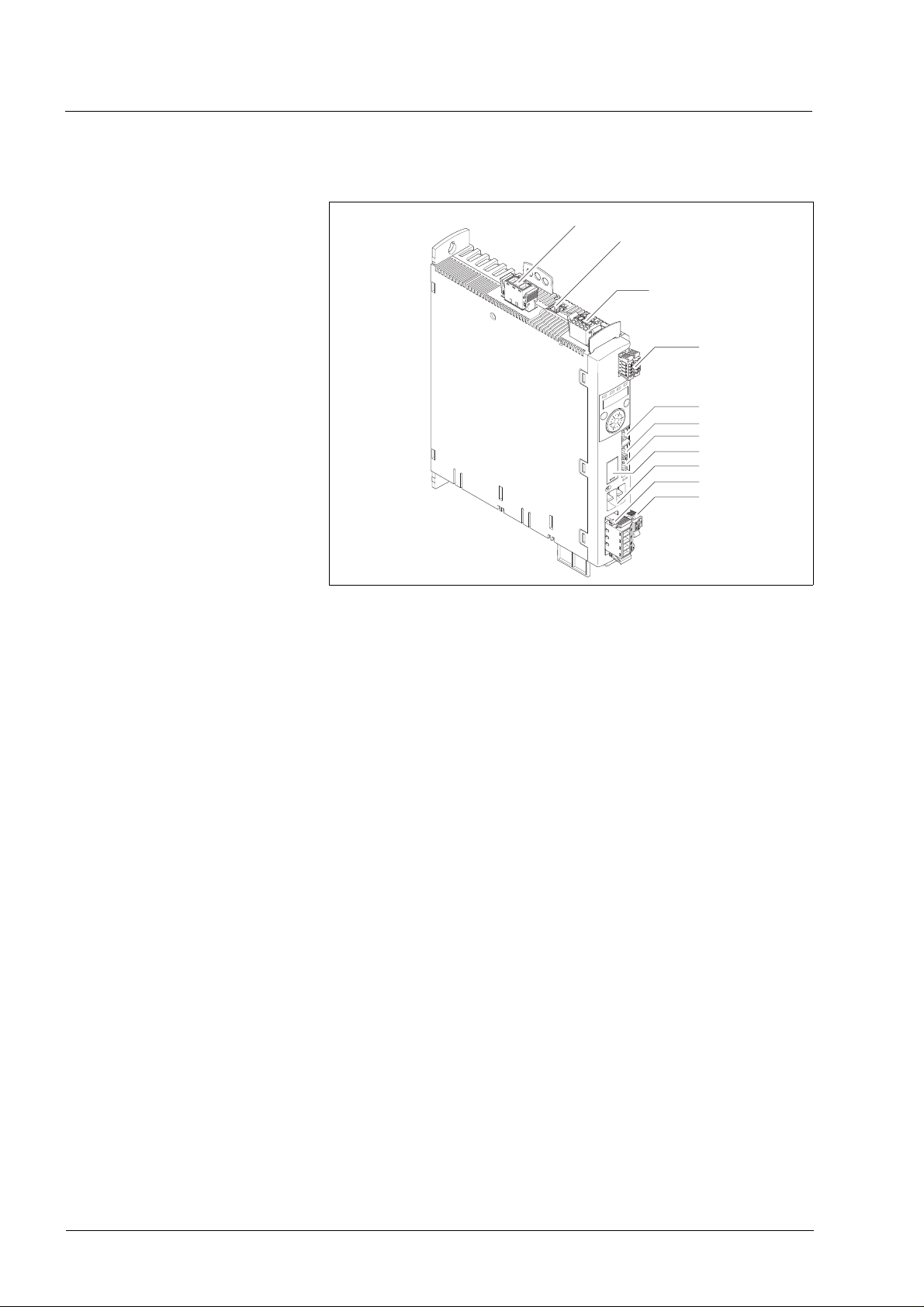
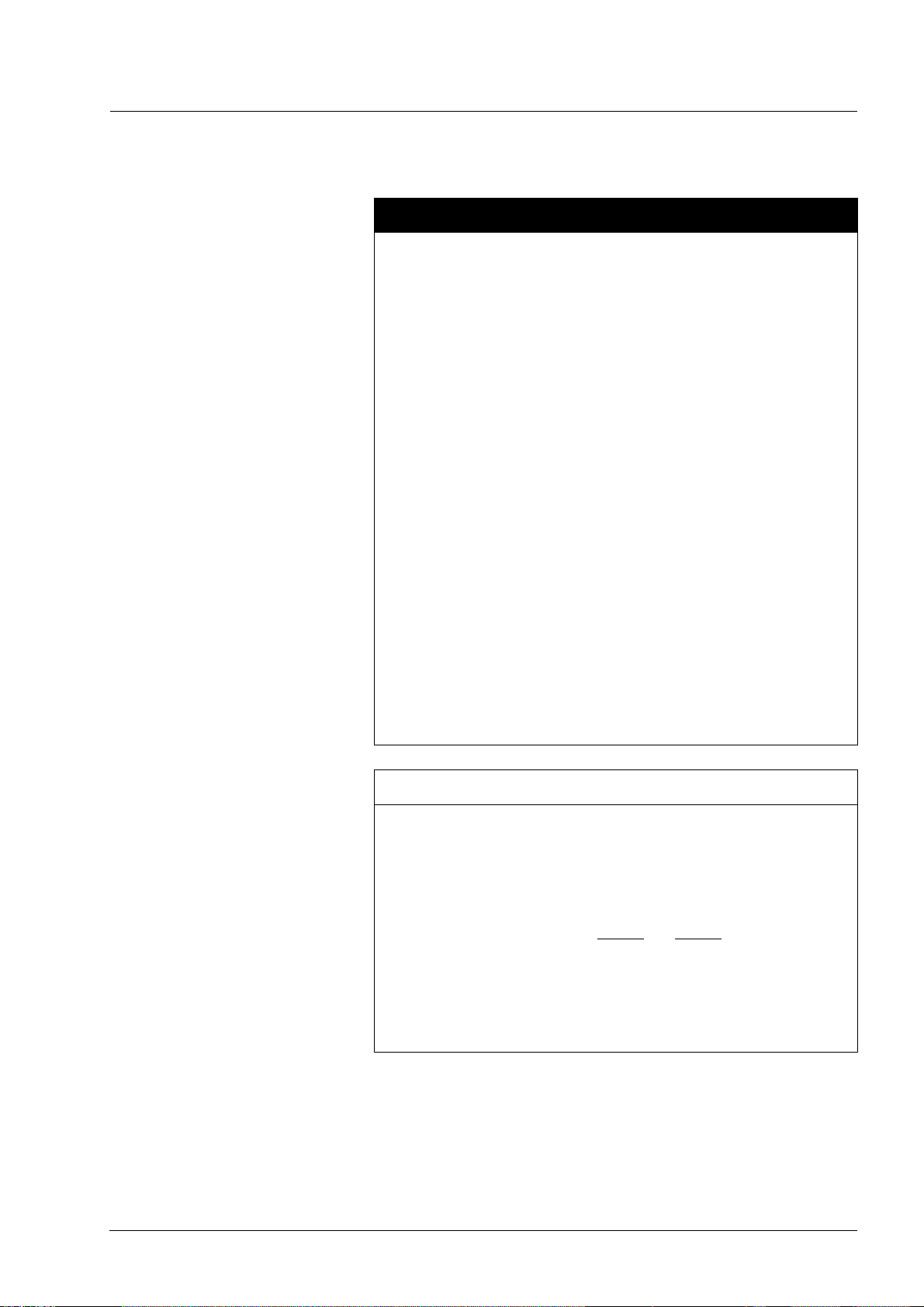
1.2 组件与接口
CN1
图 1.1 信号接口一览:
(CN1) 电源接头 (输出级电源)
(CN2) 连接
• 24V 控制系统电源
• 安全功能 STO
(CN3) 电机编码器 (编码器 1)连接
(CN4) CAN 输入
(CN5) CAN 输出
(CN6) 输入和输出
• 4 个可配置数字输入
• 2 个可配置数字输出
(CN7) Modbus (调试界面)
(CN8) 外部制动电阻连接
(CN9) DC 总线连接
(CN10) 电机相位连接
(CN 11) 电机止动闸连接
CN3
CN2
CN6
CN7
CN4
CN5
CN8
CN9
CN10
CN11
12 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 13
LXM32A 1 序言
1.3 型号代码
LXM 32 A D18 M2 (••••
)
产品名称
LXM - Lexium
产品类型
32 - 交流伺服驱动装置轴
接口
A - 带有现场总线 CANopen 的高级驱动
C – 带有模拟输入和连续脉冲的紧凑型驱动
M – 模块化驱动
峰值电流 (峰值 __Uce00)[A
U45 - 4.5A
U60 - 6A
U90 - 9A
D12 - 12A
D18 - 18A
D30 - 30A
D72 - 72A
rms
rms
rms
rms
rms
rms
rms
输出级电源 [Vac]
M2 - 1~, 115/200/240V
N4 - 3~, 400/480V
ac
ac
其它选项
rms
]
如对型号代码有疑问,请联系当地的施奈德电机销售处。如对用户定制
类型有疑问,请联系机器制造商。
用户定制类型:用户定制类型的位置 12 处有一个 S 型号代码。以下编
号定义了各种用户定制类型。示例:LXM32••••S123
设备名称请参见铭牌。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 13
Page 14

1 序言 LXM32A
14 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 15
LXM32A 2 开始之前 - 安全信息
2 开始之前 - 安全信息
2
2.1 操作人员资质
只允许专业人员使用本设备,专业人员应了解并理解本手册的内容及有
关本设备的所有资料。只允许专业人员使用本设备。专业人员应了解并
理解本手册的内容及有关本设备的所有资料,此外,还必须熟悉安全说
明书,以识别并避免相应的危险。根据自己的专业培训情况及知识和经
验,预见并意识到可能出现的危险。可能是由于设备使用不当,更改设
置,以及由于整个设备的机械、电气和电子装置而产生的这些危险。
专业人员必须熟悉使用设备须遵守的所有适用标准、规定和事故预防准
则。
2.2 指定用途
本产品是三相伺服电机的驱动放大器,根据本使用说明书,是用于工业
领域的。
务必始终遵照所有适用的安全准则,规定的条件和技术数据。
使用本产品前,必须进行有关正确使用的风险评估。根据风险评估结果
采取相应的安全措施。
由于本产品将用作整个系统的一部分,整个系统 (例如机器)结构必
须能够保证人身安全。
本设备只允许使用规定的电缆和配件。只能使用原配件和原备件。
严禁在有爆炸危险的环境 (爆炸危险区域)中使用本产品。
其它不当使用可能会引发危险。
电气设备和电动装置只能由专业人员进行安装、操作、保养和维修。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 15
Page 16
2 开始之前 - 安全信息 LXM32A
2.3 危险等级
手册中的安全说明标有警告符号。此外,产品上亦有提醒您存在潜在危
险的符号和指示。
根据危险状况的严重程度,将安全提示分为 4 个危险等级。
@ 危险
有 “危险 “字样提示时,表明即将发生危险,若不加注意,将难免
发生致命事故。
@ 警告
有 “警告 “字样提示时,表明可能会发生危险,若不加注意,也许
会发生致命事故或机器损坏事故。
@ 注意
有 “注意”字样提示时,表明可能会发生危险,若不加注意,也许
会导致事故或设备损坏。
注意
没有 “警告”符号只有 “小心”字样提示时,表明可能会发生危
险,若不加注意,也许会导致设备损坏。
16 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 17
LXM32A 2 开始之前 - 安全信息
2.4 基本信息
@ 危险
谨防触电,爆炸或电弧爆炸危险
• 只允许专业人员使用本产品,专业人员应了解并理解本手册的内
容及有关本产品的所有资料。产品的安装、调试、维修和维护只
能由专业人员进行。
• 设备制造商有责任遵守所有关于传动系统接地的适用规章制度。
• 本产品的许多部件,包括印刷电路板,在电源电压下工作。请勿
触摸。只能使用绝缘工具。
• 严禁接触带电的,无保护的零件或接线端子。
• 当轴旋转时,电机会产生电压。对传动系统进行检修之前,请采
取措施防止电机轴被外源驱动。
• 电机电缆中的交流电压可能会感应到未使用的芯线上。请在电机
电缆的两个末端对未使用的芯线进行绝缘处理。
• 严禁 DC 总线与 DC 总线电容器短路。
• 对传动系统进行检修之前:
– 请断开所有连接的电压,包括可能的外部控制电压。
– 对所有开关做 " 请勿接通 " 的标示。
– 防止所有开关再次通电。
– 等待 15 分钟 (电容器 DC 总线放电)。按照 "DC 总线电压测
量 " 一章对 DC 总线的电压进行测量,并在电压 < 42 V
进行测试。DC 总线 LED 不能清楚显示 DC 总线的电压故障。
• 安装并闭合所有盖板后,方可通电。
若不遵守该规定,将会导致死亡或严重伤害。
dc
下
@ 警告
意外运动
布线不当、设置错误、错误的数据或者其它故障均有可能导致驱动装
置发生意外运动。
电磁干扰 ( 电磁兼容性 ) 可能造成设备作出意外反应。
• 请根据电磁兼容性规范谨慎布线。
• 接通或配置本产品之前,将 STO_A
以防电机意外起动。
• 切勿通过不明设置或数据操作本产品。
• 请谨慎进行调试。
若不遵守该规定,可能会导致死亡或严重伤害。
和 STO_B 输入电源关闭,
0198441113759, V1.01, 09.2009
交流伺服驱动装置 17
Page 18
2 开始之前 - 安全信息 LXM32A
@ 警告
失控
• 制造商在开发控制装置时必须考虑潜在的失灵概率,并提供具有
某些关键功能的设备,借助于这些设备,在控制装置失灵时和失
灵后可实现安全状态。关键控制功能如急停、位置限制、电源故
障和重新起动。
• 重要功能必须有单独或冗余控制途径。
• 控制系统包括通信链接。制造商必须考虑通信链接发生意外延时
或故障情况。
• 请遵守事故防范规定及所有适用的安全规定。
• 运行前,单独并彻底检查每台安装了本手册所述产品的设备是否
正常运转。
若不遵守该规定,可能会导致死亡或严重伤害。
1) 美国用户请参阅 NEMA ICS 1.1 (最新版本)Safety Guidelines for the
Application, Installation, and Maintenance of Solid State Control,以及
NEMA ICS 7.1(最新版本)Safety Standards for Construction and Guide for
Selection, Installation for Construction and Operation of AdjustableSpeed Drive Systems。
1)
2.5 DC 总线电压测量
在本产品上进行操作之前,应将所有带电的连接断开。
@ 危险
谨防触电,爆炸或电弧爆炸危险
• 只许由明确了解"开始之前 - 安全信息 "一章安全提示的专业人员
进行测量。
若不遵守该规定,将会导致死亡或严重伤害。
DC 总线上的电压可能会超过 800 Vdc。测量时使用合适的电压测量设
备。步骤如下:
왘 不带电连接所有开关。
왘 等待 15 分钟 (电容器 DC 总线的放电)
왘 请测量 DC 总线端子之间的 DC 总线电压,并检查是否小于
42 V
。
dc
왘 如果 DC 总线电容器无法放电,请联系当地的施耐德电气销售办事
处。请勿自行维修本产品,也不要将其投入使用。
DC 总线 LED 不能清楚显示 DC 总线的电压故障。
2.6 安全功能
如要使用本产品所含有的安全功能,需进行谨慎设计。 详细说明可参阅
章节 5.9 "STO 安全功能 ("Safe Torque Off")" 第 61 页。
18 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 19

LXM32A 2 开始之前 - 安全信息
2.7 标准和术语
相关标准中对本手册中使用的专业词汇、术语,以及相关的说明做了解
释。
此外,驱动技术方面还涉及 " 安全功能 "、" 安全状态 "、" 故障 "、"
故障重置 "、" 失灵 "、" 错误 "、" 错误消息 "、" 警告 "、" 警告消息
" 等术语。
涉及如下相关标准:
• IEC 61800 系列:" 可调速电源驱动系统 "
• IEC 61800-7 系列:" 可调速电源驱动系统 - 第 7-1 部分:电源驱
动系统配置一般接口及使用 (PDS) - 接口定义 "
• IEC 61158 系列:" 控制装置数字数据通信 - 工业控制系统现场总
线"
• IEC 61784 系列:" 工业通信网 – 总则 "
• IEC 61508 系列:" 安全相关电气系统 / 电子系统 / 可编程电子系统的
功能可靠性 "
另请参阅本手册后面的词汇表。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 19
Page 20

2 开始之前 - 安全信息 LXM32A
20 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 21
LXM32A 3 技术参数
3 技术参数
3
您将在本章了解有关该产品系列及配件的环境条件,以及机械和电气性
能信息。
3.1 环境条件
运输及储存气候环境条件
操作气候环境条件
运输和贮存期间的环境必须干燥无尘。运输和储存期间的环境必须干燥
无尘。最大摆动、冲击负荷必须在规定范围内。
温度 [°C] -25 ... 70
运输和储存时的允许相对湿度为:
相对湿度 (不结露) [%] 95
允许的最大操作环境温度取决于设备安装距离以及所要求的功率。请参
照 “安装”一章中的相关规定。
环境温度 (不结露,不结冰) [°C] 0 ... 50
操作过程中的允许相对湿度如下:
相对湿度 (不结露) [%] 5 ... 95
安装高度定义为海拔高度。
不降低功率的安装高度 [m] <1000
遵照所有以下条件的安装高度:
• 最高环境温度 45 °C
[m] 1000 ... 2000
• 在 1000 m 以上,每升高
100 m,持续功率便会降低 1%
安装位置和连接
遵照所有以下条件的安装海拔高
度:
• 最高环境温度 40 °C
• 在 1000 m 以上,每升高
100 m,持续功率便会降低 1%
• 根据 IEC 60664-1,供电的过
电压限于过电压类型 II
本设备必须安装在封闭的控制柜内进行操作。只有进行牢固连接后,方
可操作本设备。
[m] 2000 ... 3000
污染等级和防护级
污染等级 2
防护级 IP 20
0198441113759, V1.01, 09.2009
交流伺服驱动装置 21
Page 22
3 技术参数 LXM32A
使用安全功能的防护级
摆动和震动
确保在生产中没有带电的污染物 (污染等级 2)。导电的污染物可能会
导致安全功能失效。
摆动,正弦波形 按照 IEC 60068-2-6 检测
震动,半正弦波形 按照 IEC 60068-2-27 检测
3.5 mm (从 2 Hz 到 8.4 Hz)
10 m/s2(从 8.4 Hz 到 200 Hz)
2
150 m/s
(当 11 ms 时)
22 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 23
LXM32A 3 技术参数
3.2 机械参数
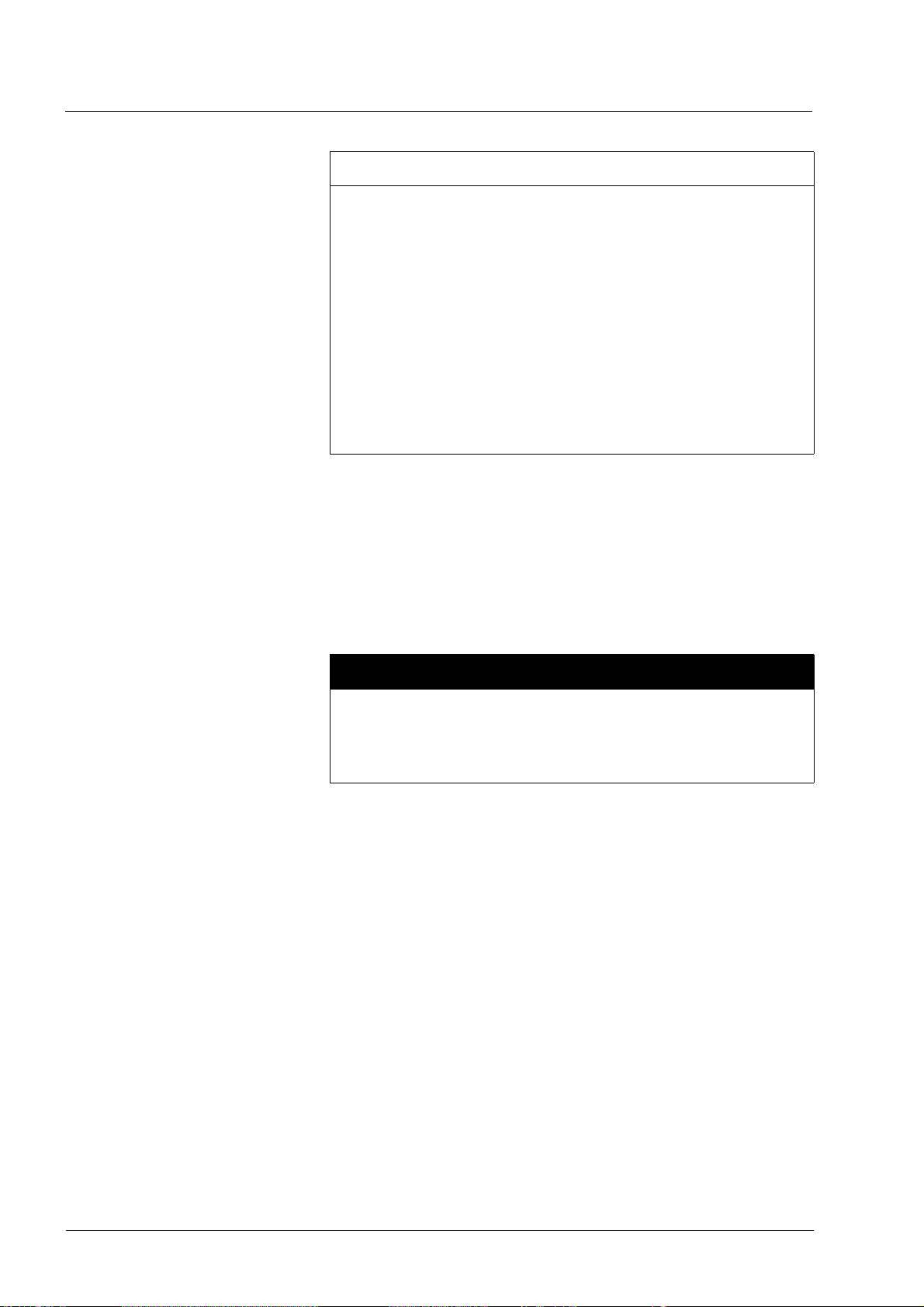
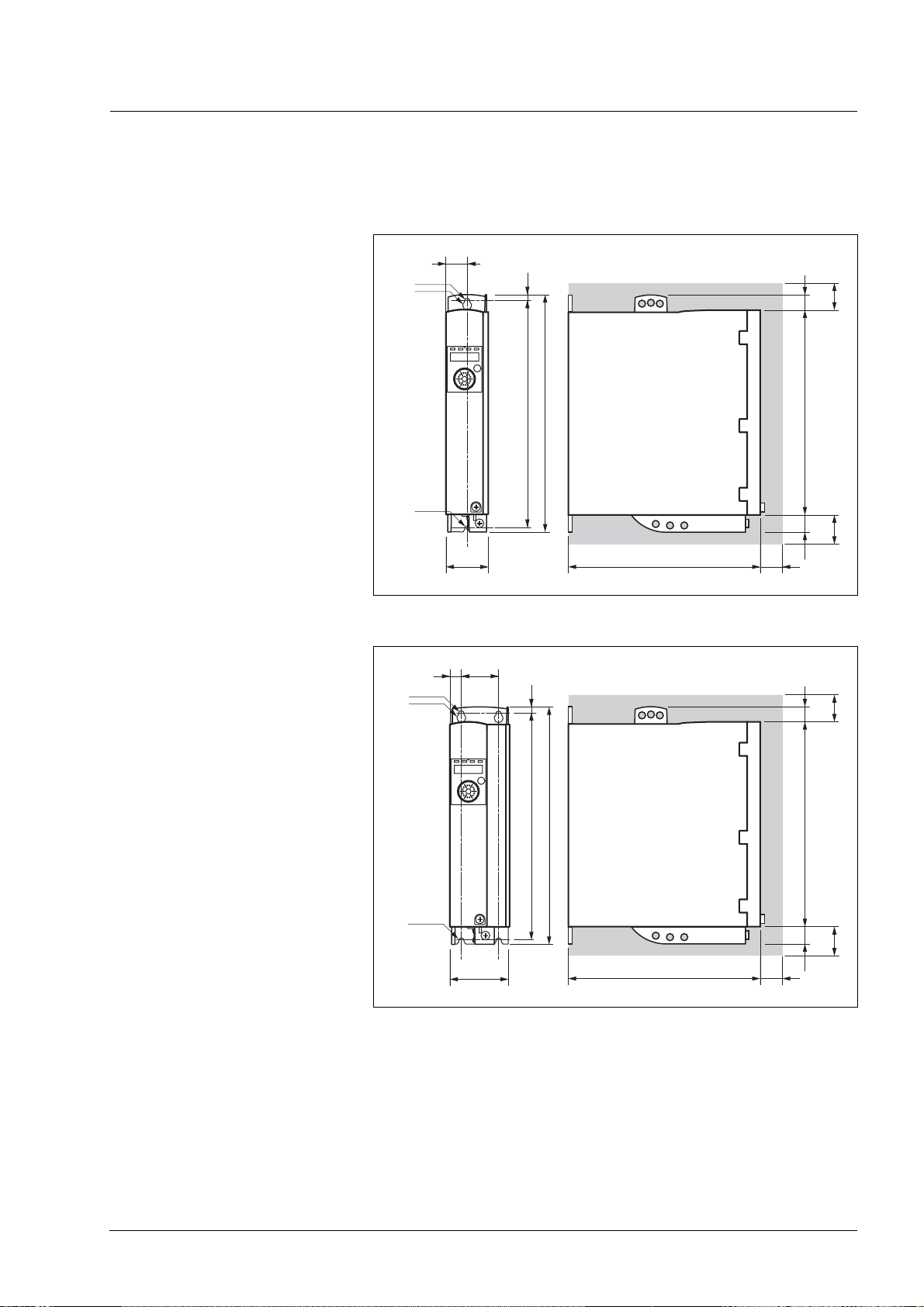
3.2.1 尺寸图
e
Ø5.5
Ø10
f
Z
Ø5.5
B
图 3.1 尺寸图
e
Ø5.5
2x
Ø10
F
H
T
E
f
F
H
h
ac
Y
X
Z
h
Ø5.5
2x
B
图 3.2 尺寸图
0198441113759, V1.01, 09.2009
交流伺服驱动装置 23
T
X
ac
Y
Page 24
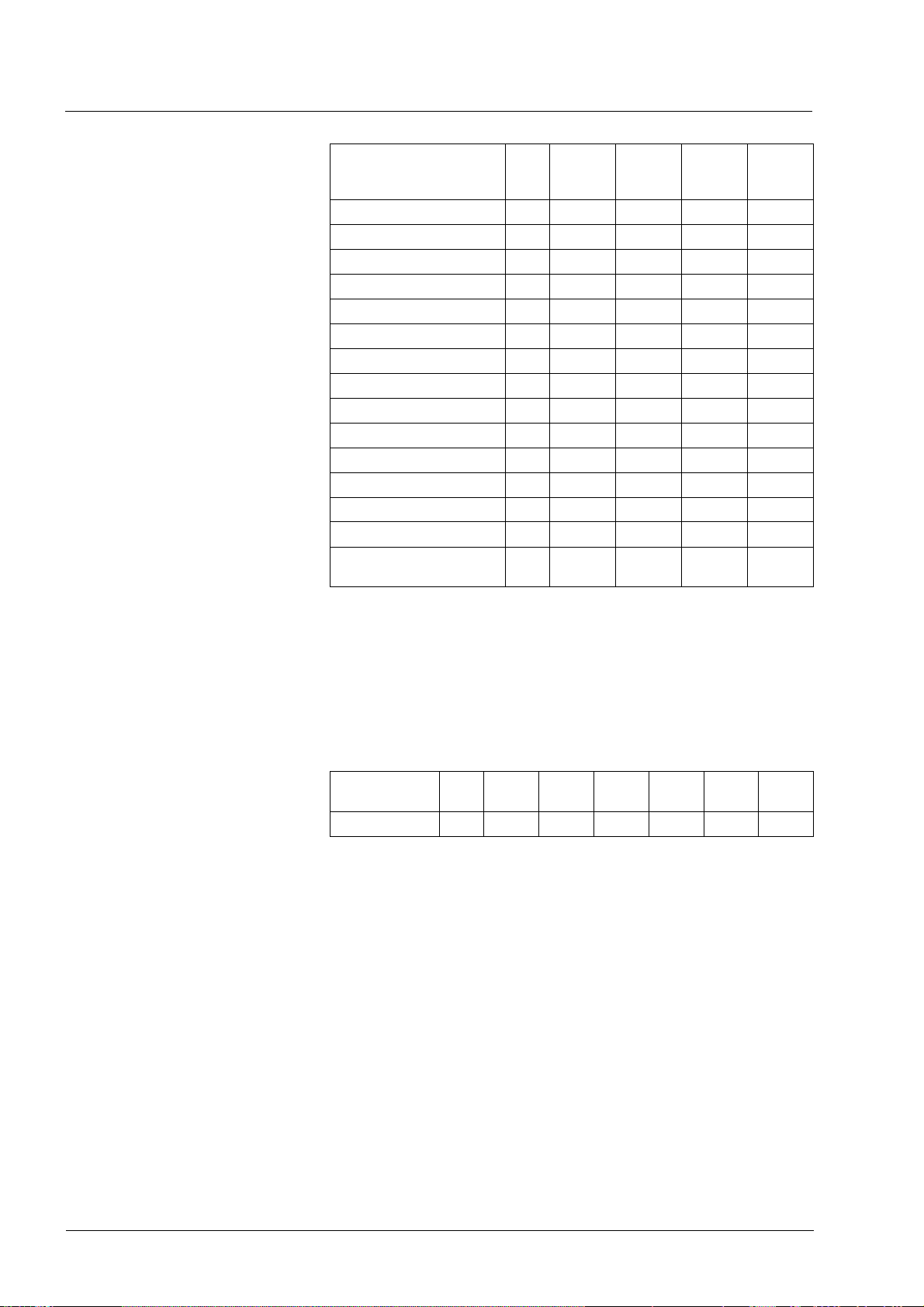
3 技术参数 LXM32A
LXM32•... U45••
U60••
U90••
图 图 3.1 图 3.1 图 3.2 图 3.2
B [mm] 48 ±148±168±1 108 ±1
T [mm] 225 225 225 225
H [mm] 270 270 270 274
e [mm] 24 24 13 13
E [mm] - - 42 82
F [mm] 258 258 258 258
f [mm] 7.5 7.5 7.5 7.5
a [mm] 20 20 20 24
h [mm] 230 230 230 230
c [mm] 20 20 20 20
X 所需空间 [mm] 60 60 60 60
Y 所需空间 [mm] 100 100 100 100
Z 所需空间 [mm] 100 100 100 100
散热类型 对流
1) >1 m/s
D12••
D18••
D30M2
1)
风扇
40 mm
D30N4 D72••
风扇
60 mm
风扇
80 mm
质量
设备连接线需朝上和朝下进行引线。为了能够有足够好的空气循环并使
电线敷设时不弯折,应按照以下间距:
• 在设备上方至少保持 100 mm 的空间距离。
• 在设备下方至少保持 100 mm 的空间距离。
• 在设备前方至少保持 60 mm 的空间距离。注意碰触其它控制装置。
LXM32•... U45•• U60••
U90••
质量 kg 1.6 1.7 1.8 2.0 2.6 4.7
D12••
D18M2
D18N4
D30M2
D30N4 D72N4
24 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 25
LXM32A 3 技术参数
3.3 电气参数
本产品专用于工业领域,只允许在牢固连接后方可进行操作。
3.3.1 输出级
电源电压 : 范围和公差
电源连接方式 (接地连接方式)
接通电流与漏电电流
115/230 Vac 单相 [Vac] 100 -15% ... 120 +10%
115/230 V
400/480 Vac 三相 [Vac] 380 -15% ... 480 +10%
频率 [Hz] 50 -5% ... 60 +5%
瞬态过电压 过电压类型 III
接地额定电压 [Vac] 300
1) 根据安装高度,请参阅第 21 页。
TT 网络,TN 网络 是否允许
IT 网络 不允许
带接地外导体的电网 不允许
启动电流 [A] <60
漏电电流 (根据 IEC 60990,图
3)
1) 当电源有接地中性点、无外部电源滤波器时的测量值。 使用故障电流保护开关时
应注意 :30mA 保护开关在电流为 15mA 就会动作。 除此之外,还会有高频漏电电
流流过,在测量过程中已将其忽略。 故障电流保护开关对此反应不同。
单相 [Vac] 200 -15% ... 240 +10%
ac
1)
[mA] <30
1)
电流消耗与电源阻抗
监测恒定输出电流
监测恒定输出电流
峰值输出电流 1 秒钟
允许使用的电机
耗电量取决于供电电网的阻抗。它由可能发生的短路电流来决定。当供
电电网具有较高的短路电流时,需前接电源扼流圈。合适的电源扼流圈
可在 12.14 " 电源扼流圈 " 一章中找到。
用设备监测恒定输出功率。如果恒定输出功率超时,设备便会下调输出
功率。若环境温度低于 50°C 且内部制动电阻不发热,则会保持输送
恒定输出电流。
用设备监测恒定输出电流。如果超过了恒定的输出电流,该设备便会下
调输出电流。
设备可以给出峰值输出电流 1 秒钟。当峰值输出电流在电机停止状态
下输送时,由于各个半导体开关具有较高负荷,电流限制便会在起动电
机前实施。
本系列设备可连接以下允许的电机系列:BMH、BSH
选择时需注意电源电压的类型和高度。根据需求提供其它电机。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 25
Page 26
3 技术参数 LXM32A
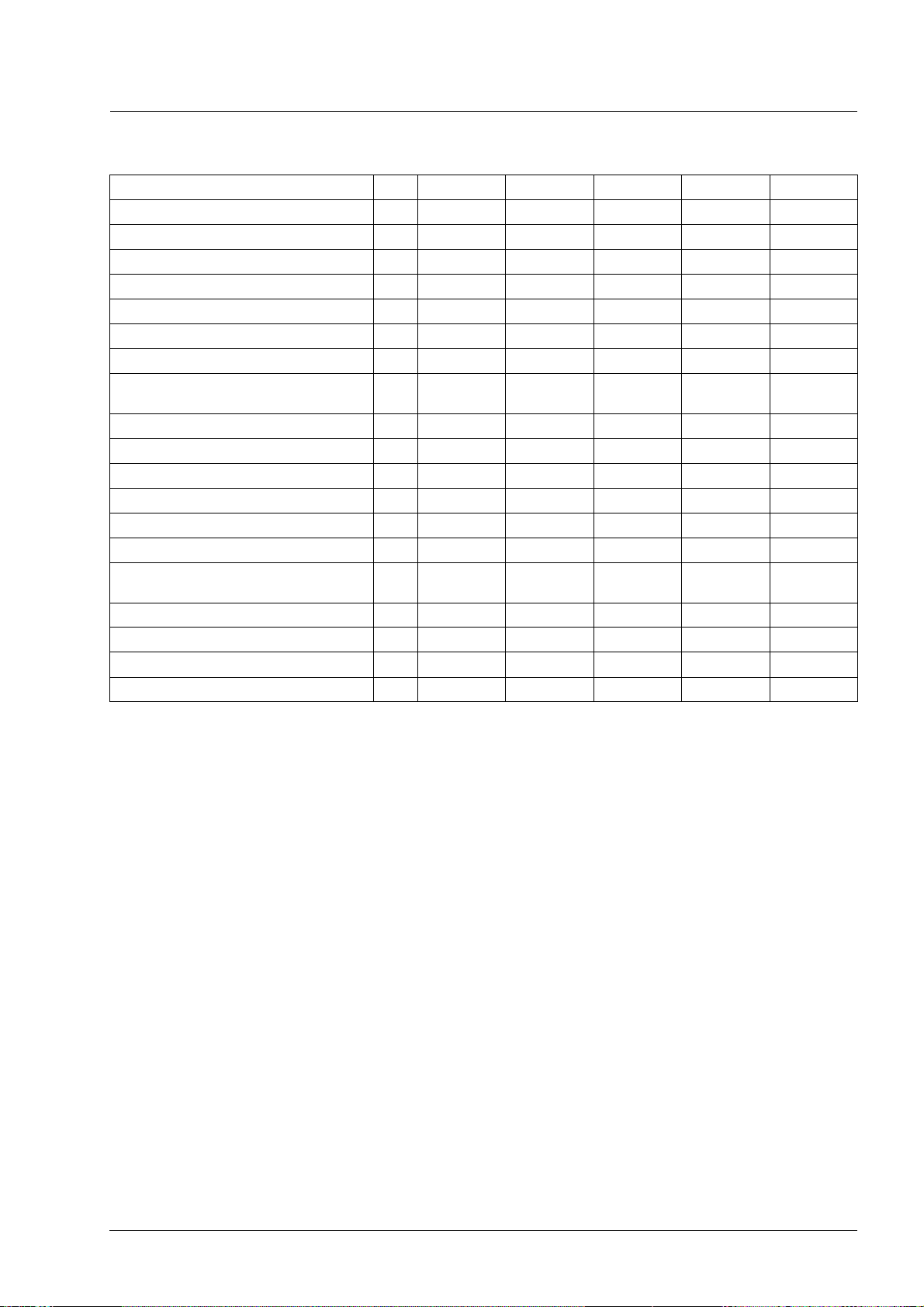
3.3.1.1 单相设备 115Vac 的数据
LXM32•... U45M2•... U90M2•... D18M2•... D30M2•...
额定电压 [V] 115 (1 ∼) 115 (1 ∼) 115 (1 ∼) 115 (1 ∼)
恒定输出电流 [Ams] 1.5 3 6 10
峰值输出电流 (时长 1 s) [A
启动电流极限值 [A] 1.7 3.5 8 16
额定电压下无电源扼流圈的电流消耗
1)
无电源扼流圈时的额定功率 [kW] .15 .3 .5 .8
电源的最大允许短路电流 [kA] 1111
无电源扼流圈的输入电流 THD (总谐波失真)[%] 173 159 147 135
]361015
ms
[Ams] 2.9 5.4 8.5 12.9
损耗功率无电源扼流圈
最大启动电流无电源扼流圈
2)
3)
[W] 7 15 28 33
[A] 111 161 203 231
无电源扼流圈时最大启动电流时间 [ms] .8 1.0 1.2 1.4
电源扼流圈 [mH] 5222
额定电压下有电源扼流圈的电流消耗
1)
[Ams] 2.6 5.2 9.9 9.9
有电源扼流圈时的额定功率 [kW] .2 .4 .8 .8
有电源扼流圈的输入电流 THD (总谐波失真)[%]85907472
有电源扼流圈时的损耗功率
有电源扼流圈时的最大启动电流
2)
3)
[W] 8 16 32 33
[A]22485661
有电源扼流圈时的最大启动电流时间 [ms] 3.3 3.1 3.5 3.7
最大串联熔断器
1) 在额定功率降低时
2) 条件:内部制动电阻无作用 ; 在额定电流,额定电压和额定功率下的数值 ; 数值几乎与电流成正比
3) 在极端情况下,在启动电流极限值之前的断开 / 接通脉冲,最大时间参见下行:断开 / 接通脉冲
4) 熔断器:根据 UL 248-4 的 CC 或 J 等级的熔断熔断器,可选择具有 B 或 C 性能的自动熔断器。
可以使用较小的参数值。应这样选择熔断器:在标出的电流消耗下,熔断器不会断开。
4)
[A]25252525
26 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 27
LXM32A 3 技术参数
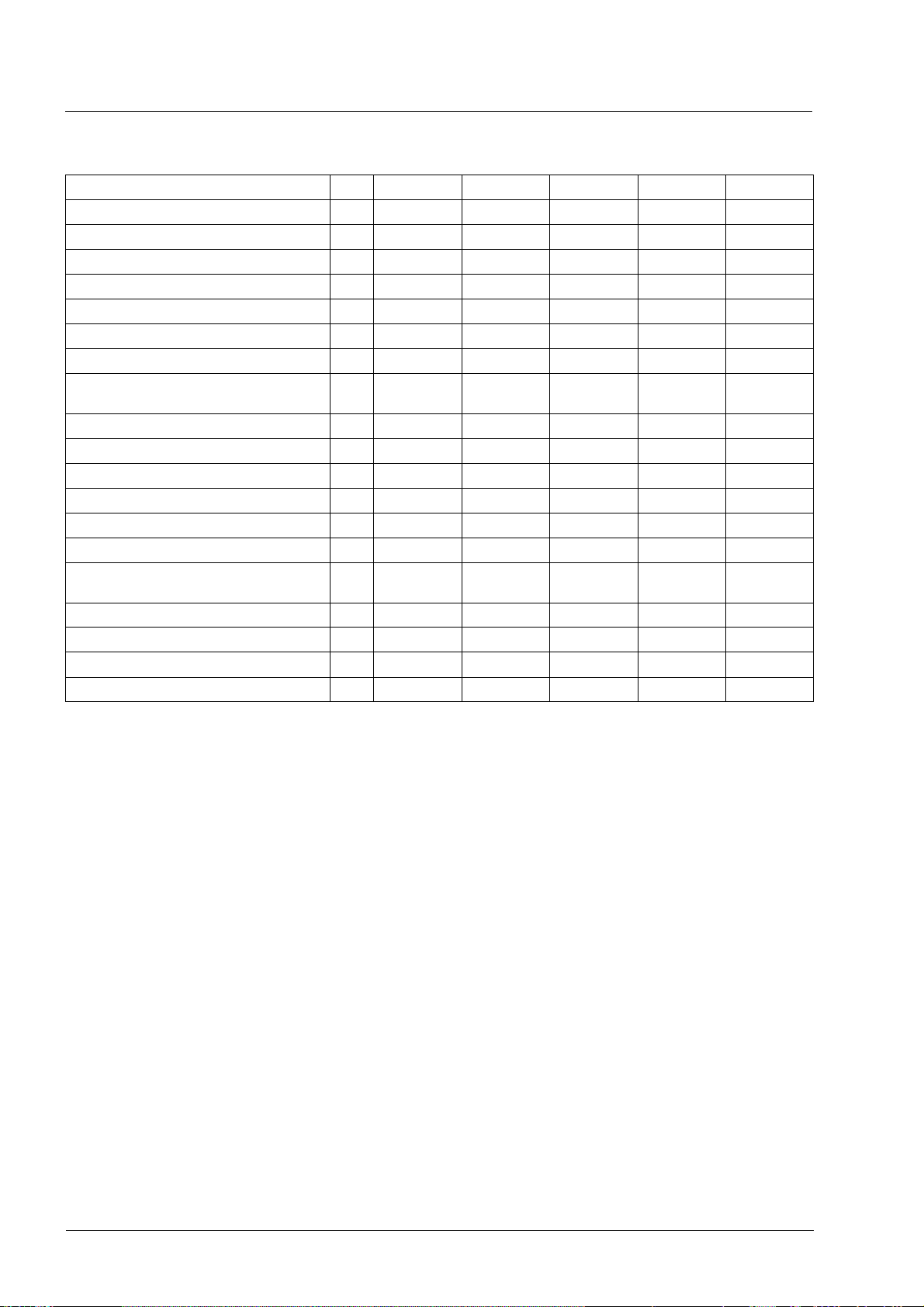
3.3.1.2 单相设备 230V
的数据
ac
LXM32•... U45M2•... U90M2•... D18M2•... D30M2•...
额定电压 [V] 230 (1 ∼) 230 (1 ∼) 230 (1 ∼) 230 (1 ∼)
恒定输出电流 [Ams] 1.5 3 6 10
峰值输出电流 (时长 1 s) [A
] 4.5 9 18 30
ms
启动电流极限值 [A] 3.5 6.9 16 33
额定电压下无电源扼流圈的电流消耗
1)
[Ams] 2.9 4.5 8.4 12.7
无电源扼流圈时的额定功率 [kW] .3 .5 1.0 1.6
电源的最大允许短路电流 [kA] 1111
无电源扼流圈的输入电流 THD (总谐波失真)[%] 181 166 148 135
损耗功率无电源扼流圈
最大启动电流无电源扼流圈
2)
3)
[W] 10 18 34 38
[A] 142 197 240 270
无电源扼流圈时最大启动电流时间 [ms] 1.1 1.5 1.8 2.1
电源扼流圈 [mH] 5222
额定电压下有电源扼流圈的电流消耗
1)
[Ams] 3.4 6.3 10.6 14.1
有电源扼流圈时的额定功率 [kW] .5 .9 1.6 2.2
有电源扼流圈的输入电流 THD (总谐波失真)[%] 100 107 93 86
有电源扼流圈时的损耗功率
有电源扼流圈时的最大启动电流
2)
3)
[W] 11 20 38 42
[A] 42 90 106 116
有电源扼流圈时的最大启动电流时间 [ms] 3.5 3.2 3.6 4.0
最大串联熔断器
1) 在额定功率降低时
2) 条件:内部制动电阻无作用 ; 在额定电流,额定电压和额定功率下的数值 ; 数值几乎与电流成正比
3) 在极端情况下,在启动电流极限值之前的断开 / 接通脉冲,最大时间参见下行:断开 / 接通脉冲
4) 熔断器:根据 UL 248-4 的 CC 或 J 等级的熔断熔断器,可选择具有 B 或 C 性能的自动熔断器。
可以使用较小的参数值。应这样选择熔断器:在标出的电流消耗下,熔断器不会断开。
4)
[A] 25 25 25 25
0198441113759, V1.01, 09.2009
交流伺服驱动装置 27
Page 28
3 技术参数 LXM32A
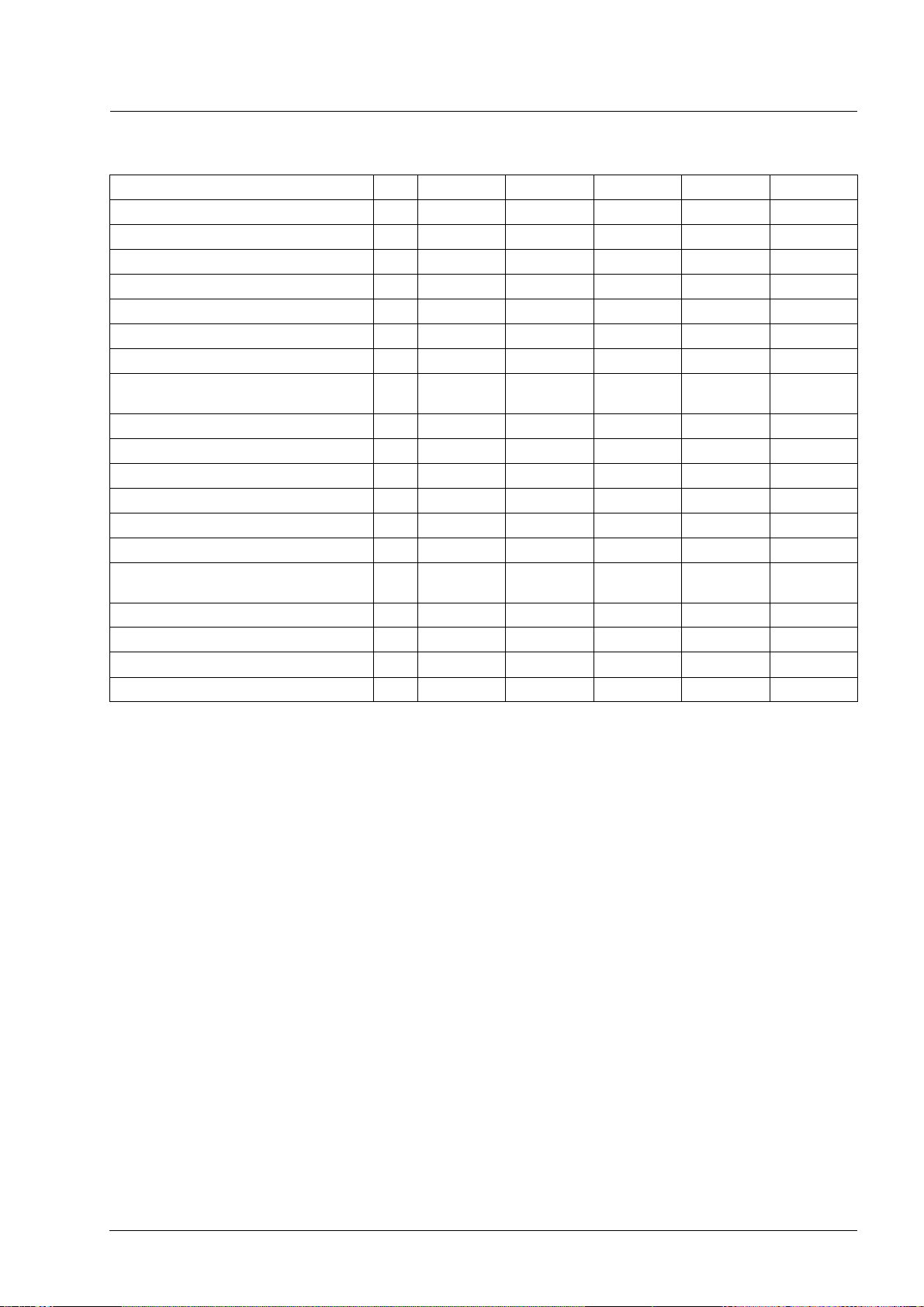
3.3.1.3 400Vac 三相设备的数据
LXM32•... U60N4•... D12N4•... D18N4•... D30N4•... D72N4•...
额定电压 [V] 400 (3 ∼) 400 (3 ∼) 400 (3 ∼) 400 (3 ∼) 400 (3 ∼)
恒定输出电流 [Ams] 1.5 3 6 10 24
峰值输出电流 (时长 1 s) [A
启动电流极限值 [A] 4.3 9.4 19 19 57
额定电压下无电源扼流圈的电流消耗
1)
无电源扼流圈时的额定功率 [kW] .4 .9 1.8 3.0 7
电源的最大允许短路电流 [kA] 55555
无电源扼流圈的输入电流 THD (总谐波失真)[%] 191 177 161 148 126
] 6 12 18 30 72
ms
[Ams] 1.4 2.9 5.2 8.3 17.3
损耗功率无电源扼流圈
最大启动电流无电源扼流圈
2)
3)
[W] 17 37 68 115 283
[A] 90 131 201 248 359
无电源扼流圈时最大启动电流时间 [ms] .5 .7 .9 1.1 1.4
电源扼流圈 [mH] 22111
额定电压下有电源扼流圈的电流消耗
1)
[Ams] 1.8 3.4 6.9 11.1 22.5
有电源扼流圈时的额定功率 [kW] .8 1.6 3.3 5.6 13
有电源扼流圈的输入电流 THD (总谐波失真)[%] 108 90 90 77 45
有电源扼流圈时的损耗功率
有电源扼流圈时的最大启动电流
2)
3)
[W] 19 40 74 125 308
[A]28367587112
有电源扼流圈时的最大启动电流时间 [ms] 1.9 2.3 2.3 2.6 3.0
最大串联熔断器
1) 在额定功率降低时
2) 条件:内部制动电阻无作用 ; 在额定电流,额定电压和额定功率下的数值 ; 数值几乎与电流成正比
3) 在极端情况下,在启动电流极限值之前的断开 / 接通脉冲,最大时间参见下行:断开 / 接通脉冲
4) 熔断器:根据 UL 248-4 的 CC 或 J 等级的熔断熔断器,可选择具有 B 或 C 性能的自动熔断器。
说明 30/32A: 对于 UL,允许最大 30A
可以使用较小的参数值。应这样选择熔断器:在标出的电流消耗下,熔断器不会断开。
4)
[A] 30/32 30/32 30/32 30/32 30/32
28 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 29
LXM32A 3 技术参数
3.3.1.4 480V
三相设备的数据
ac
LXM32•... U60N4•... D12N4•... D18N4•... D30N4•... D72N4•...
额定电压 [V] 480 (3 ∼) 480 (3 ∼) 480 (3 ∼) 480 (3 ∼) 480 (3 ∼)
恒定输出电流 [Ams] 1.5 3 6 10 24
峰值输出电流 (时长 1 s) [A
] 6 12 18 30 72
ms
启动电流极限值 [A] 5.1 11.3 23 23 68
额定电压下无电源扼流圈的电流消耗
1)
[Ams] 1.2 2.4 4.5 7.0 14.6
无电源扼流圈时的额定功率 [kW] .4 .9 1.8 3.0 7
电源的最大允许短路电流 [kA] 55555
无电源扼流圈的输入电流 THD (总谐波失真)[%] 201 182 165 152 129
损耗功率无电源扼流圈
最大启动电流无电源扼流圈
2)
3)
[W] 20 42 76 129 315
[A] 129 188 286 350 504
无电源扼流圈时最大启动电流时间 [ms] .6 .7 1.0 1.2 1.6
电源扼流圈 [mH] 22111
额定电压下有电源扼流圈的电流消耗
1)
[Ams] 1.6 2.9 6.0 9.6 19.5
有电源扼流圈时的额定功率 [kW] .8 1.6 3.3 5.6 13
有电源扼流圈的输入电流 THD (总谐波失真)[%] 116 98 98 85 55
有电源扼流圈时的损耗功率
有电源扼流圈时的最大启动电流
2)
3)
[W] 21 44 82 137 341
[A] 43 57 116 137 177
有电源扼流圈时的最大启动电流时间 [ms] 1.9 2.4 2.4 2.7 3.2
最大串联熔断器
1) 在额定功率降低时
2) 条件:内部制动电阻无作用 ; 在额定电流,额定电压和额定功率下的数值 ; 数值几乎与电流成正比
3) 在极端情况下,在启动电流极限值之前的断开 / 接通脉冲,最大时间参见下行:断开 / 接通脉冲
4) 熔断器:根据 UL 248-4 的 CC 或 J 等级的熔断熔断器,可选择具有 B 或 C 性能的自动熔断器。
说明 30/32A: 对于 UL,允许最大 30A
可以使用较小的参数值。应这样选择熔断器:在标出的电流消耗下,熔断器不会断开。
4)
[A] 30/32 30/32 30/32 30/32 30/32
0198441113759, V1.01, 09.2009
交流伺服驱动装置 29
Page 30
3 技术参数 LXM32A
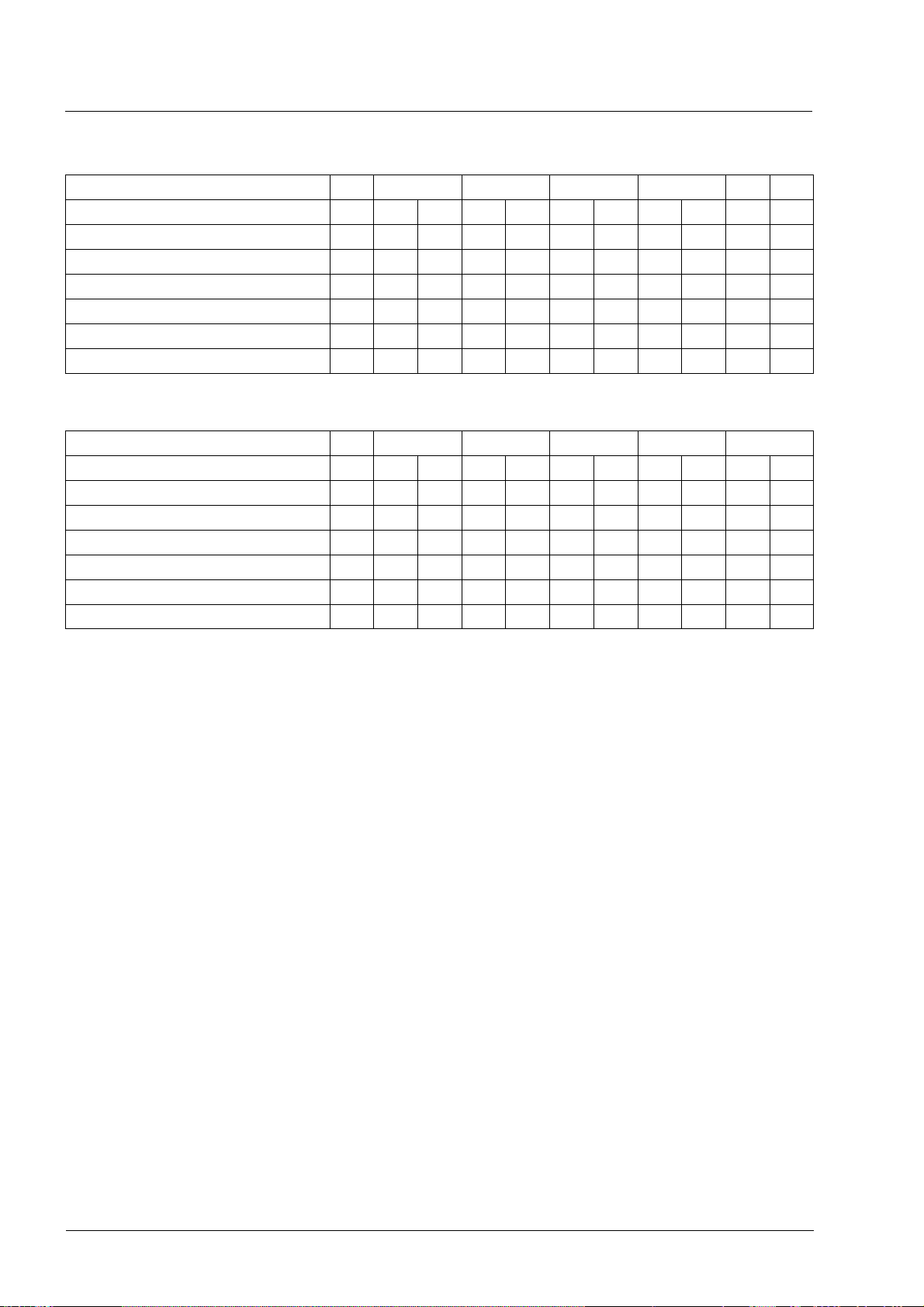
3.3.1.5 单相设备 DC 总线数据
LXM32•... (1 ∼) U45M2 U90M2 D18M2 D30M2
额定电压 (1 ∼) [V] 115 230 115 230 115 230 115 230
DC 总线额定电压 [V] 163 325 163 325 163 325 163 325
电压极限下限值 [V] 55 130 55 130 55 130 55 130
电压极限值:采用快速停止 [V] 60 140 60 140 60 140 60 140
电压极限值 [V] 450 450 450 450 450 450 450 450
经过 DC 总线的最大恒定功率 [kW] .2 .5 .4 .9 .8 1.6 .8 2.2
经过 DC 总线的最大恒定电流 [A] 1.5 1.5 3.2 3.2 6.0 6.0 10.0 10.0
3.3.1.6 三相设备 DC 总线数据
LXM32•... (3 ∼) U60N4 D12N4 D18N4 D30N4 D72N4
额定电压 (3 ∼) [V] 400 480 400 480 400 480 400 480 400 480
DC 总线额定电压 [V] 566 679 566 679 566 679 566 679 566 679
电压极限下限值 [V] 350 350 350 350 350 350 350 350 350 350
电压极限值:采用快速停止 [V] 360 360 360 360 360 360 360 360 360 360
电压极限值 [V] 820 820 820 820 820 820 820 820 820 820
经过 DC 总线的最大恒定功率 [kW] .8 .8 1.6 1.6 3.3 3.3 5.6 5.6 13.0 13.0
经过 DC 总线的最大恒定电流 [A] 1.5 1.5 3.2 3.2 6.0 6.0 10.0 10.0 22.0 22.0
30 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 31

LXM32A 3 技术参数
3.3.2 24VDC 控制系统电源
[V
dc
29
28
27
26
]
24V 电源
控制系统电源的 +24VDC 电压必须符合 IEC 61131-2 要求 (PELV 标
准):
输入电压 [Vdc] 24 V -15% / +20%
电流消耗 (无负载时) [A] ≤1
剩余波纹度 (波纹) <5%
1) 对未安装有止动闸的电机和装有止动闸的电机 ; 参见下图
2) 电流消耗:不考虑止动闸
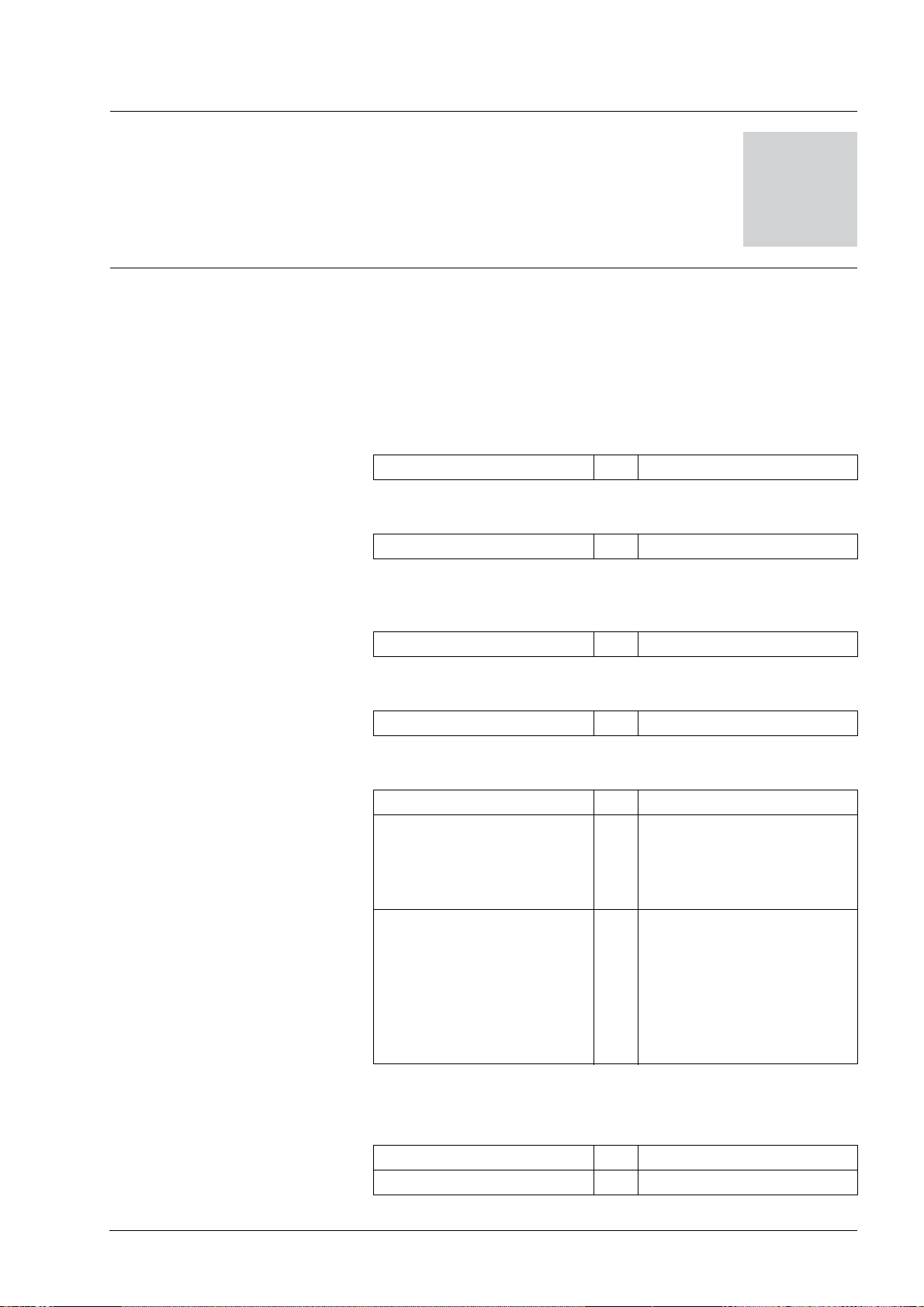
当电机连接停车制动时,控制系统电源电压 24 V
2)
dc
1)
必须符合所连接的
电机和电机电缆长度。可从下图采用作为连接在 CN2 上制动器的排气
扇的控制系统电源电压。电压公差为 ±5%。
BMH205
BSH100x
BSH140x
BSH055x
BSH070x
25
24
23
0 908070605040302010 100
图 3.3 控制系统电源的电压取决于电机和电机电缆长度
BMH070x
BMH100x
BMH140x
[m]
0198441113759, V1.01, 09.2009
交流伺服驱动装置 31
Page 32

3 技术参数 LXM32A
3.3.3 信号
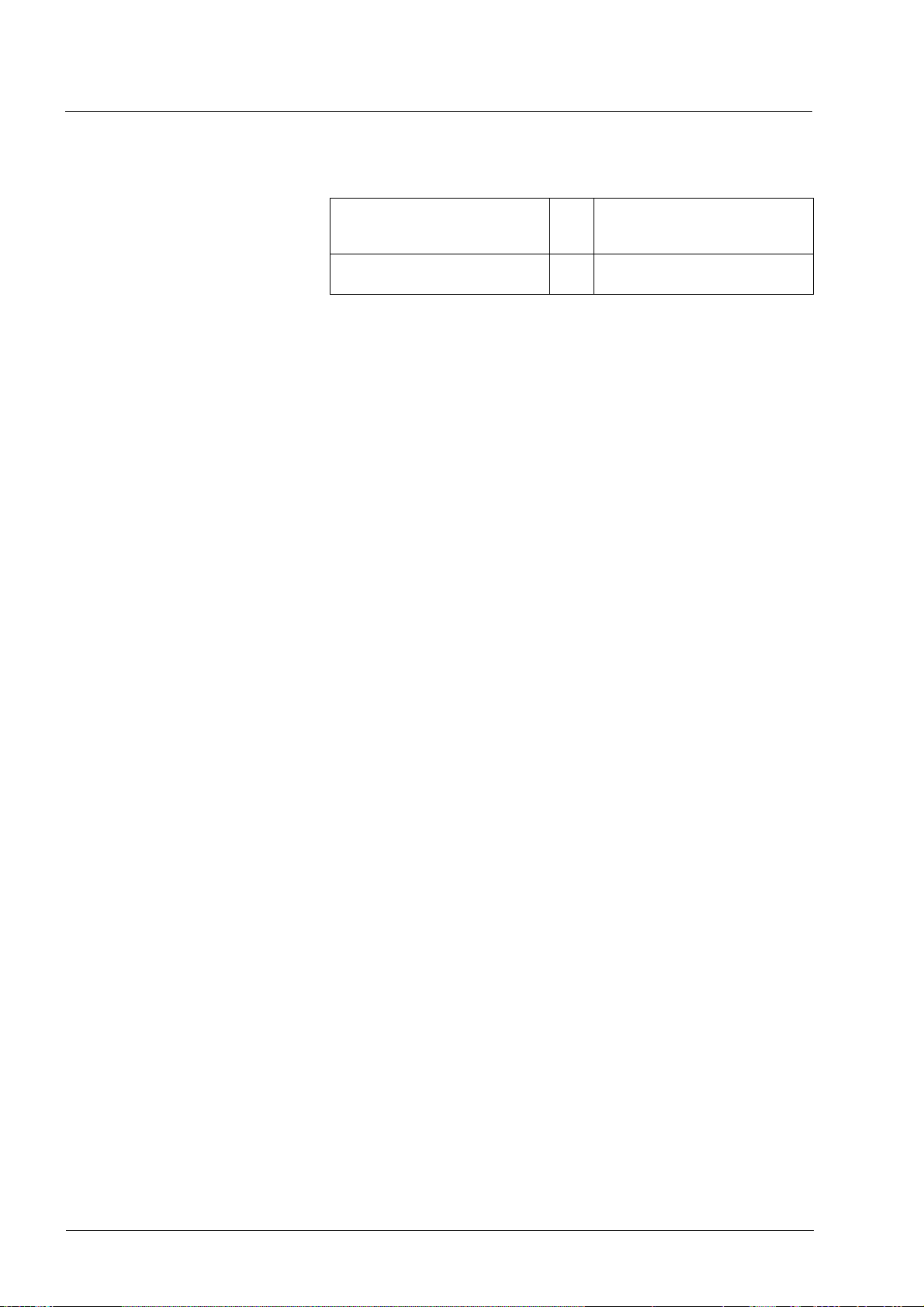
本产品的数字输入和输出可以布线成为逻辑类型 1 或 2。
1 2
数字输入信号 24 V
+24V
0V
DQ_COM
DQ0,DQ1,...
DI0,DI1,...
DI_COM
+24V
0V
DQ_COM
DQ0,DQ1,...
DI0,DI1,...
DI_COM
图 3.4 逻辑类型
逻辑类型 激活状态
(1) 逻辑类型 1 输出提供电流 (Source)
电流流入输入
(2) 逻辑类型 2 出口吸引电流 (Sink)
电流从输入流出
信号输入端具有反极性保护,输出端为抗短路型。输入和输出有电流隔
离。
光电偶输入端电平 DI• 作为逻辑类型 1 布线符合 EN 61131-2,型
号1。
逻辑 0 (U
逻辑 1 (U高)[V
输入电流 (典型值) [mA] 5
去抖动时间
1) 可通过参数进行设置 (采样周期 250 祍)
)[V
(低)
1)
] -3 ... +5
dc
] +15 ... +30
dc
[ms] 1.5
获取输入信号 24 V
光电偶输入的电平 Cap• 作为 " 逻辑类型 1" 布线符合 EN 61131-2,型
号1。
逻辑 0 (U
逻辑 1 (U
输入电流 (典型值) [mA] 5
去抖动时间 CAP1 和 CAP2 [μs] 2
跳动 CAP1 和 CAP2 [μs] <2
)[V
(低)
)[V
高
] -3 ... +5
dc
] +15 ... +30
dc
切断电源输入信号安全功能
逻辑 0 (U
逻辑 1 (U高)[V
输入电流 (典型值) [mA] 5
去抖动时间 STO_A
识别 STO_A
号差别
安全功能 STO 响应时间 [ms] ≤10
)[V
(低)
] -3 ... +5
dc
] +15 ... +30
dc
和 STO_B [ms] >1
与 STO_B 之间的信
[s] >1
32 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 33

LXM32A 3 技术参数
24V 输出信号
CAN 总线信号
编码器信号
3.3.4 安全功能
维护计划和安全性计算所需的数据
24 V 数字输出信号 DQ• 符合 IEC 61131-2。
输出电压 [V] ≤30
最大启动电流 [mA] ≤100
当负载为 100mA 时的电压降 [V] ≤3
CAN 总线信号符合 CAN 标准并且防短路。
编码器信号符合 Stegmann Hiperface 规格。
编码器输出电压 +10V / 100mA
SIN/COS 输入信号电压范围 1Vpp有 2.5V 偏差,
输入电阻 [Ω] 120
(在 100kHz 下)
.5V
pp
输出电压有抗短路和有过载保护。传输协议根据 RS485 异步半双工。
请考虑以下切断电源安全功能数据的维护计划和安全计算:
使用寿命 (IEC 61508) 20 年
SFF (IEC 61508)
Safe Failure Fraction
HFT (IEC 61508)
Hardware Fault Tolerance
类型 A 零件系统
安全集成电平
IEC 61508
IEC 62061
PFH (IEC 61508)
Probability of Dangerous
Hardware Failure per Hour
PL (ISO 13849-1)
Performance Level
MTTF
(ISO 13849-1)
d
Mean Time to Dangerous Failure
DC (ISO 13849-1)
Diagnostic Coverage
[%] 88.6
1
SIL3
SILCL3
[1/h] 8.6*10
e (分类 3)
1504 年
[%] 90
-10
0198441113759, V1.01, 09.2009
交流伺服驱动装置 33
Page 34

3 技术参数 LXM32A
3.3.5 制动电阻
本设备有一个内部制动电阻。如果此内部制动电阻不够动力学应用,则
必须使用一个或多个外部制动电阻。
不得超出外部制动电阻所标出的最小电阻值。如果通过相关参数启动了
外部制动电阻,则应把内部制动电阻断开。
关于本主题的其它信息 页
制动电阻参数 56
外部制动电阻的装配 (配件) 70
制动电阻的电气装置 (配件) 81
设置制动电阻的参数 123
外部制动电阻 (配件)的订货数据 311
LXM32•... U45M2 U90M2 D18M2 D30M2
内部电容器能耗 E
(在额定电压 115 V 下)[Ws] 30 60 89 119
var
内部电容器能耗 E
内部电容器能耗 E
(在额定电压 200 V 下)[Ws] 17 34 52 69
var
(在额定电压 230 V 下)[Ws]9 182635
var
电容 [μF] 390 780 1170 1560
内部制动电阻的电阻值 [Ω]94472010
内部制动电阻的恒定功率 P
峰值能耗 E
CR
PR
[W]10204060
[Ws] 82 166 330 550
接通电压 [V] 430 430 430 430
最小外部制动电阻 [Ω]90402010
最大外部制动电阻 [Ω] 110 55 27 16
外部制动电阻的最大恒定功率 [W] 200 400 600 800
LXM32•... U60N4 D12N4 D18N4 D30N4 D72N4
内部电容器能耗 E
内部电容器能耗 E
内部电容器能耗 E
(在额定电压 380 V 下)[Ws] 14 25 50 73 145
var
(在额定电压 400 V 下)[Ws] 12 22 43 62 124
var
(在额定电压 480 V 下)[Ws]3 5 101428
var
电容 [μF] 110 195 390 560 1120
内部制动电阻的电阻值 [Ω]7160303010
内部制动电阻的恒定功率 P
峰值能耗 E
CR
PR
[W] 20 40 60 100 150
[Ws] 200 400 600 1000 2400
接通电压 [V] 780 780 780 780 780
最小外部制动电阻 [Ω]7050252510
最大外部制动电阻
1)
[Ω] 145 73 50 30 12
外部制动电阻的最大恒定功率 [W] 200 500 800 1500 3000
1) 所标出的最大制动电阻会降低设备的峰值功率。根据用途的不同,也可以使用较高电阻率的电阻。
34 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 35

LXM32A 3 技术参数
3.3.5.1 外部制动电阻 (配件)
VW3A760... 1Rxx
1)
2Rxx 3Rxx 4Rxx
1)
5Rxx 6Rxx 7Rxx
1)
电阻值 [Ω]10272727727272
恒定功率 [W] 400 100 200 400 100 200 400
115 V / 230 V 时的最大接通时间 [s] .72 .552 1.08 2.64 1.44 3.72 9.6
400 V 时的最大接通时间 [s] 0.12 0.084 0.216 0.504 0.3 0.78 1.92
115 V / 230 V 时的峰值功率 [kW] 18.5 6.8 6.8 6.8 2.6 2.6 2.6
400V 时的峰值功率 [kW] 60.8 22.5 22.5 22.5 8.5 8.5 8.5
115 V / 230 V 时的最大峰值能耗 [Ws] 13300 3800 7400 18100 3700 9600 24700
400 V 时的最大峰值能耗 [Ws] 7300 1900 4900 11400 2500 6600 16200
防护级 IP65 IP65 IP65 IP65 IP65 IP65 IP65
UL 许可证 (证书号) E233422 E233422 E233422 E233422
1) 持续功率为 400W 的电阻无 UL/CSA 许可证。
VW3A77... 04 05
电阻值 [Ω]15 10
恒定功率 [W] 1000 1000
115 V / 230 V 时的最大接通时间 [s] 3.5 1.98
400 V 时的最大接通时间 [s] .65 .37
115 V / 230 V 时的峰值功率 [kW] 18.5 12.3
400V 时的峰值功率 [kW] 60.8 40.6
115 V / 230 V 时的最大峰值能耗 [Ws] 43100 36500
400 V 时的最大峰值能耗 [Ws] 26500 22500
防护级 IP20 IP20
UL 许可证 (证书号) E221095 E221095
0198441113759, V1.01, 09.2009
交流伺服驱动装置 35
Page 36

3 技术参数 LXM32A
3.3.6 内部电源滤波器
关于本主题的其它信息 页
外部电源滤波器的设计 (配件) 54
外部电源扼流圈 (配件)的安装 70
外部电源扼流圈 (配件)的电气安装 83
外部电源扼流圈 (配件)的订货数据 317
极限值
干扰辐射
如果在安装时遵守本用户手册中所描述的电磁兼容性规范,本产品便满
足 IEC 61800-3 标准的电磁兼容性要求。
如果选择的组合没有规定 C1 类别,则请注意以下提示:
@ 警告
高频干扰
本产品可能会在居住环境中引起高频干扰,可能需要采取抗干扰措
施。
若不遵守该规定,可能会导致死亡或严重伤害。
针对电磁兼容性兼容的结构和使用配件中提供的电缆需遵守干扰辐射的
以下极限值。
LXM32• 功率发射的干扰 场效发射的干扰
•••M2 至 10m 的电
机电缆长度
•••M2 10m 至 20m 的
电机电缆长度
•••M2 20m 以上的电
机电缆长度
•••N4 至 20m 电机
电缆长度
•••N4 至 20m 电机
电缆长度
类别 C2 类别 C3
类别 C3 类别 C3
不允许 不允许
类别 C3 类别 C3
不允许 不允许
使用较长的电机电缆时,必须预接外部的电源滤波器。这个外部电源滤
波器做为配件的技术数据可在第 37 页上找到。
36 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 37

LXM32A 3 技术参数
3.3.7 电源滤波器 (配件)
使用外部电源滤波器时运行人员必须保证遵守电磁兼容性规定。
关于本主题的其它信息 页
外部电源滤波器的设计 (配件) 54
外部电源扼流圈 (配件)的安装 70
外部电源扼流圈 (配件)的电气安装 83
外部电源扼流圈 (配件)的订货数据 317
干扰辐射
组合外部电源滤波器
使用配件中的电源滤波器需遵守所注明的极限值。
针对电磁兼容性兼容的结构和使用配件中提供的电缆需遵守干扰辐射的
以下极限值。
LXM32• 功率发射的干扰 场效发射的干扰
•••M2 至 20m 的电
机电缆长度
•••M2 20m 至 50m 的
电机电缆长度
•••M2 50m 至 100m
的电机电缆长度
•••M2 100m 以上的
电机电缆长度
•••N4 至 20m 电机
电缆长度
•••N4 20m 至 50m 的
电机电缆长度
•••N4 50m 至 100m
的电机电缆长度
•••N4 至 100m 电机
电缆长度
类别 C1 类别 C3
类别 C2 类别 C3
类别 C3 类别 C3
不允许 不允许
类别 C1 类别 C3
类别 C2 类别 C3
类别 C3 类别 C3
不允许 不允许
多台设备可连接在联合的外部电源滤波器上。其条件是:
• 单相设备只能连接单相的电源滤波器,三相设备只能连接三相的电
源滤波器
• 所连接设备的总耗电量必须小于或等于电源滤波器的允许的额定电
流。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 37
Page 38

3 技术参数 LXM32A
外部电源滤波器电气型号配置
3.3.8 电源扼流圈 (配件)
电源扼流圈
设备类型 1 ∼ 电源滤波器订单号
LXM32•U45M2 (230 V, 1.5 A, 1 ∼) VW3A31401 (9 A, 1 ∼)
LXM32•U90M2 (230 V, 3 A, 1 ∼) VW3A31401 (9 A, 1 ∼)
LXM32•D18M2 (230 V, 6 A, 1 ∼) VW3A31403 (16 A, 1 ∼)
LXM32•D30M2 (230 V, 10 A, 1 ∼) VW3A31403 (16 A, 1 ∼)
设备类型 3 ∼ 电源滤波器订单号
LXM32•U60N4 (480 V, 1.5 A, 3 ∼) VW3A31404 (15 A, 3 ∼)
LXM32•D12N4 (480 V, 3 A, 3 ∼) VW3A31404 (15 A, 3 ∼)
LXM32•D18N4 (480 V, 6 A, 3 ∼) VW3A31404 (15 A, 3 ∼)
LXM32•D30N4 (480 V, 10 A, 3 ∼) VW3A31404 (15 A, 3 ∼)
LXM32•D72N4 (480 V, 24 A, 3 ∼) VW3A31406 (25 A, 3 ∼)
如果电源不符合对阻抗所描述的要求,则必须预接电源扼流圈。最大允
许的电源短路电流被作为衡量电源阻抗。通过电源扼流圈可降低电源供
电中的谐波,延长电器的使用寿命。
预接电源扼流圈的另一个优点是设备具有更高的持续功率。
关于本主题的其它信息 页
电源扼流圈 (配件)的设计 53
电源扼流圈 (配件)的装配 70
电源扼流圈 (配件)的电气安装 83
电源扼流圈 (配件)的订货数据 316
38 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 39

LXM32A 3 技术参数
3.4 要求:UL 508C
如果本产品符合 UL 508C 的使用,则必须另外满足以下要求:
操作环境温度
污染等级
熔断器
布线
400/480 V 三相设备
过电压类型
环境空气温度 [°C] 0 ... +50
污染等级 2
请使用 UL 248-4 标准中 CC 或 J 等级的熔断保险装置或清单中列出的
自动断路器 UL489。
LXM32••••N4 最大串联熔断器 [A] 30
至少应使用 60/75 °C 铜线。
400/480 V 三相设备只允许在最大为 480Y/277Vac 的电源上运行。
单相系统必须安装施耐德电气过电压保护装置 TVS230XR40,三相系统
必须安装施耐德电气过电压保护装置 TVS4XW100C 或由 UL 列出的过电压
保护装置,该装置必须适用于终端安装驱动放大器的电源的所有相位,
并具有下列特征:
UL Category Code VZCA
Type 1 or 2
Operating Voltage 240V for 1-phase systems and 480Y/277V for 3phase systems
Voltage Protection Rating (VPR) max. 4000V
Nominal Discharge Current Rating (In) min. 3kA
3.5 认证
本产品已通过认证:
通过以下认证 颁证编号 有效期
T 躒 Nord SAS-192/2008TB-1 2014-06-25
UL E198280
CiA (Can in Automation) CiA200906-301V402/20-0104
0198441113759, V1.01, 09.2009
交流伺服驱动装置 39
Page 40

3 技术参数 LXM32A
3.6 一致性声明
以下一致性声明适用于在规定的条件下使用本产品和装有指定电缆配件
的产品。
SCHNEIDER ELECTRIC MOTION DEUTSCHLAND GmbH
Breslauer Str. 7 D-77933 Lahr
EC D
ECLARATION OF CONFORMITY
EAR
Y
according to EC Directive on Machinery 2006/42/EC
according to EC Directive EMC 2004/108/EC
according to EC Directive Low Voltage 2006/95/EC
2009
We hereby declare that the products listed below meet the requirements of the EC
Directives indicated with respect to design, construction and version distributed by us. This
declaration becomes invalid in the case of any modification to the products not authorized
by us.
Designation: AC Servo drive including modules
Type: LXM32Axxxxx, LXM32Cxxxxx, LXM32Mxxxxx,
VW3M3501, VW3M3401, VW3M3402, VW3M3403,
VW3A3608, VW3A3618, VW3M3301
Applied
harmonized
standards,
especially:
EN ISO 13849-1:2008, Performance Level "e"
EN 61508:2001, SIL 3
EN 61800-5-1:2007
EN 61800-3:2004, second environment
Applied
national standards
and technical
UL 508C
CSA C22.2 No. 14-05
Product documentation
specifications,
especially:
Company stamp:
Date/Signature: 8 July 2009
Name/Department: Wolfgang Brandstätter/Development
40 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 41

LXM32A 3 技术参数
3.7 功能安全性认证证书
0198441113759, V1.01, 09.2009
交流伺服驱动装置 41
Page 42

3 技术参数 LXM32A
42 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 43
LXM32A 4 基础知识
4 基础知识
4
4.1 安全功能
自动化与安全技术在以往属于两个完全不同的范畴,目前二者都在不断
共同成长。通过集成安全功能,复杂的自动化解决方案的设计及安装均
可得到简化。
安全技术要求通常均和具体应用有关。这些要求的程度以相关之应用所
产生的潜在风险和危险为准。
集成安全功能 "Safe Torque Off"
STO
IEC 61508 标准
SIL, Safety Integrity Level
PFH,每小时发生某一危险失效事件
的概率
集成安全功能 STO (IEC 61800-5-2) 可用来实现 IEC 60204-1 规定的
0 类停止,无需使用外部接触器。不需要断开电源电压。由此减少系统
费用和响应时间。
IEC 61508 之研究
IEC 61508 标准 " 与安全有关之电气、电子、可编程电子系统的功能安
全性 " 所关注的就是与安全相关的功能。所考虑的不仅仅是某一个单一
的组件,而是将一个完整的功能链 (例如从传感器、逻辑处理单元,
一直到最终的执行机构)作为一个整体来看待。这一功能链必须全部满
足相应安全集成等级的要求。以此为基础,开发出可以用来在各种应用
领域,其安全性能具有可比对的风险的系统和组件。
IEC 61508 标准为安全功能规定了四种安全完整性等级 (SIL)。SIL1 为
最低等级,SIL4 为最高等级。确定安全完整性等级的基础是基于危险
和风险分析对危险进行评估。由此可推断出相关功能链是否具有安全功
能,以及何种潜在的危险必须消除。
为了使安全功能得以保持,IEC 61508 标准要求(根据所要求的 SIL 等
级)采取可控制故障以及防止故障发生的措施。 某一安全功能的所有组
件均必须进行概率分析,以便对所采取之故障控制措施的有效性加以评
估。 通过考虑这些因素确定安全系统的 PFH (probability of a
dangerous failure per hour)。 这就是在一小时之内,某一安全系统
因失灵而引起危险且无法继续执行安全功能的概率。 PFH 不得超过根据
SIL 等级为整个安全系统所规定的值。 可将某一功能链的个别 PFH 合
并计算,结果不得超过标准中所规定的最大值。
SIL 高要求率或者连续要求条件下的 PFH
4 ≥10-9 ... <10
3 ≥10-8 ... <10
2 ≥10-7 ... <10
1 ≥10-6 ... <10
0198441113759, V1.01, 09.2009
交流伺服驱动装置 43
-8
-7
-6
-5
Page 44

4 基础知识 LXM32A
HFT 和 SFF
避免故障的措施
此外,标准 IEC 61508 还根据安全系统的 SIL 等级,要求当存在一定
比例的非危险性故障 SFF (safe failure fraction 安全失效比例)
时,应具有一定的硬件容错性 (HFT,hardware fault tolerance)。
硬件容错性是系统的一种属性,即尽管存在某个或者多个硬件故障,仍
然可以执行所要求的安全功能。系统的安全失效比例 SFF 是非危险性
故障率与系统总故障率之间的比例。根据 IEC 61508 标准的要求,某一
系统可能达到的最大 SIL 由系统的硬件容错性 (HFT) 和安全失效比例
(SFF) 共同决定。
IEC 61508 区别子系统的两种类型 (A 子系统,B 子系统)。根据安全
技术构件标准中定义的原则区分两种类型。
SFF HFT 类型 A - 子系统 HFT 类型 B - 子系统
012 012
< 60% SIL1 SIL2 SIL3 --- SIL1 SIL2
60% ... <90% SIL2 SIL3 SIL4 SIL1 SIL2 SIL3
90% ... < 99% SIL3 SIL4 SIL4 SIL2 SIL3 SIL4
≥99% SIL3 SIL4 SIL4 SIL3 SIL4 SIL4
规范、硬件和软件中的系统性故障以及安全系统的使用故障和检修故障
必须尽可能加以避免。IEC 61508 为此规定了一系列的故障避免措施,
必须根据 SIL 目标实施相应措施。这些故障防范措施必须伴随安全系
统的整个寿命周期,即从设计一直到系统停止使用。
44 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 45

LXM32A 5 设计
5设计
5
本章介绍了关于本产品使用的情况,这对于设计必不可少。
主题 页
5.1 " 电磁兼容性 (EMC)" 46
5.2 " 电缆 " 49
5.3 " 剩余电流动作保护器 " 51
5.4 " 在 IT 网络中使用 " 51
5.5 "DC 总线并联连接 " 52
5.6 " 电源扼流圈 " 53
5.7 " 电源滤波器 " 54
5.8 " 确定制动电阻参数 " 56
5.9 "STO 安全功能 ("Safe Torque Off")" 61
5.10 " 逻辑类型 " 64
5.11 " 监控功能 " 65
5.12 " 可配置的输入和输出 " 65
5.13 "CAN 现场总线的连接 " 66
0198441113759, V1.01, 09.2009
交流伺服驱动装置 45
Page 46
5 设计 LXM32A
5.1 电磁兼容性 (EMC)
@ 警告
信号和设备干扰
受到干扰的信号可能会引起设备作出意想不到的响应。
• 请根据 “电磁兼容性规范”进行布线。
• 检查是否正确执行了 “电磁兼容性规范”。
若不遵守该规定,可能会导致死亡、严重伤害或财产损失。
极限值
控制柜结构
如果在安装时遵守本用户手册中所描述的电磁兼容性规范,本产品便满
足 IEC 61800-3 标准的电磁兼容性要求。
如果选择的组合没有规定 C1 类别,则请注意以下提示:
@ 警告
高频干扰
本产品可能会在居住环境中引起高频干扰,可能需要采取抗干扰措
施。
若不遵守该规定,可能会导致死亡或严重伤害。
安装必须符合电磁兼容性规范,才可遵照所规定的极限。请注意以下规
定:
电磁兼容性措施 目标
使用镀锌 / 镀铬安装板,大面积连接金属零件,除
去接触面上的油漆层。
控制柜、门和安装板通过截面积大于 10 mm
(AWG 6) 的接地母线或接地电缆接地。
使用抗干扰部件或者消弧器对接触器、继电器或者
电磁阀进行抗干扰处理 (例如二极管,变阻器,RC
元件)。
分开安装电源组件和控制组件。 减小彼此间的干扰耦合。
2
采用平面接触方式,导
电性好
减小辐射。
减小彼此间的干扰耦合。
已屏蔽电缆
电磁兼容性措施 目标
水平摆放电缆屏蔽,用电缆夹和接地母线。 减小辐射。
控制柜出口上所有屏蔽电缆的屏蔽线要通过电缆夹
与安装板大面积连接。
数字信号线的屏蔽线两端应大面积接地,或者通过
导电的插接器机壳接地。
模拟信号线的屏蔽线直接在设备上 (信号输入端)
接地,在电缆头将屏蔽线绝缘,或者当存在干扰时
通过一个电容器 (例如 10nF)接地。
仅使用有铜编织层已屏蔽电机电缆且至少覆盖 85%,
屏蔽电缆两端大面积接地。
减小辐射。
减少信号线有效干扰,
减小辐射。
避免低频干扰引起的嗡
嗡声。
降低干扰电流,减小辐
射。
46 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 47

LXM32A 5 设计
布线
电源供应
电磁兼容性措施 目标
现场总线电缆和信号线不要与 60V 以上直流和交流
电压的电缆布置在同一个电缆槽中。(现场总线电缆
可以与信号线和模拟线布置在一个线槽内)
建议:分开布置在间距至少 20cm 的电缆槽内。
电缆应尽可能短。请勿布置不必要的环形电缆,电
气控制柜中的中央地线端子到外部地线端子的电缆
要尽可能短。
对以下设备使用电位均衡导线
– 安装面积较大的设备
– 具有不同馈入电压的设备
– 跨建筑物联网的设备
使用细芯电位均衡导线。 可减小高频干扰电流。
如果电机与机器没有导电性连接,例如通过绝缘法
兰或非平面连接,应通过截面积大于 10 mm
线 (AWG 6) 或者接地母线将电机接地。
对 24 V
电磁兼容性措施 目标
将本产品连接在具有接地中性点的电源上工作。 使电源滤波器起作用。
过压危险的保护电路。 降低过压风险。
信号使用双绞线。 避免控制电缆的干扰影
dc
2
的接地
减小彼此间的干扰耦合。
减少电容式和电感式干
扰耦合。
减小电缆屏蔽线上的电
流,减小辐射。
减小辐射,提高抗干扰
性。
响,减小辐射。
电机电缆与编码器电缆
提高电磁兼容性能的其它措施 ;
从电磁兼容性角度看,电机电缆和编码器电缆非常重要。只能使用组合
式电缆 (请参见 12 " 附件与备件 " 一章)或具备规定性能的电缆 (请
参见第 49 页后的 5.2 " 电缆 " 一章),并注意下列电磁兼容性规范。
电磁兼容性措施 目标
请勿将开关元件装入电机电缆或编码器电缆。 减少干扰耦合。
电机电缆与信号电缆之间至少有 20cm 的间距,或
者用屏蔽板将电机电缆和信号线隔开。
如果电缆较长,则使用电位均衡导线。 减小电缆屏蔽线上的电
采用不断开的方式敷设电机电缆和编码器电缆。
1) 如果某条电缆在安装时必须断开,则电缆必须在断点位置连接屏蔽连接器和金属
机壳
减小彼此间的干扰耦合。
流。
1)
减少干扰耦合。
安装必须符合电磁兼容性规范,才可遵照所规定的极限。视应用情况而
定,采取下列措施可能会获得比较好的效果:
电磁兼容性措施 目标
串联电源扼流圈 减小电源谐振,延长本
产品使用寿命。
串联外部电源滤波器 提高电磁兼容性极限值。
务必根据电磁兼容性规范进行安装,例如在所连接
的控制柜中应使辐射干扰衰减 15 dB
提高电磁兼容性极限值。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 47
Page 48

5 设计 LXM32A
ᴎ఼
ࠊᶰ
ᘏഄ⚍
⬉⑤Ⓒ⊶఼˄䗝䜡乍˅
᭄ᄫ䕧ܹ䕧ߎֵো
⦄എᘏ㒓
⬉ᴎ
Ϣᴎ఼݅ৠഄ˅
M~
L1
L2
L3
㓪ⷕ఼
⬉ᴎ
图 5.1 电磁兼容性规范
48 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 49

LXM32A 5 设计
5.2 电缆
电缆的适用性
屏蔽连接
等电位连接导线
电缆导管
电缆不得被扭绞、拉伸、挤压或者折弯。请始终根据电缆规格使用电
缆。请注意适宜性,例如:
• 适合于牵引链应用
• 温度范围
• 化学稳定性
• 布成明线
• 地下布线
连接屏蔽线有以下方法:
• 电机电缆:电机电缆的屏蔽线固定在交流伺服驱动设备下方的接地
夹上
• 其它电缆:屏蔽线敷设在本设备下面的屏蔽连接器上
• 另一种方法:例如通过接地夹和母线进行屏蔽连接。
由于电位差异,不允许的强电流可能流入屏蔽电缆中。请使用电位平衡
线,目的是,减小屏蔽电缆上的电流。
对于流动的最大平衡电流必须测量电位平衡线的长短。实际上下列导线
的横截面已证明是合适的:
• 16 mm
• 20 mm
本设备的上面和下面各有一个电缆导管。电缆导管不用于对电缆进行去
张力。设备下面的电缆导管可以用作屏蔽连接器。
2
(AWG 4) 用于长度小于 200 m 的电位平衡线
2
(AWG 4) 用于长度小于 200 m 的电位平衡线
提示:上面的电缆导管不是屏蔽连接器。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 49
Page 50

5 设计 LXM32A
5.2.1 所需电缆一览表
下面的一览表介绍了所需电缆的特性。请您使用组合式电缆,以尽量减
少布线错误。关于组合式电缆,请参见 12 " 附件与备件 " 一章 (第
311 页)。如果要根据 UL 508C 的规定使用本产品,则必须满足 3.4 "
要求:UL 508C" 一章 (第 39 页)中列举的条件。
最大长度
[m]
最小横截面面积 [mm2]
(AWG)
已屏蔽,两端接地双绞线 PELV
控制系统电源 − .75 (AWG 18) 必需
STO 安全功能
输出级电源 −−
电机相位 −
1)
− .75 (AWG 18)
2)
3)
4)
−
1)
必需
必需
外部制动电阻 3 同输出级电源 必需
电机编码器 100 6*.14 mm2 和 2*.34 mm2
必需 必需 必需
(6*AWG 24 和 2*AWG 20)
CAN 现场总线
5)
6)
−
.14 (AWG 24) 必需 必需 必需
数字输入 / 输出 30 .14 (AWG 24) 必需
PC, 调试界面 20 .14 (AWG 24) 必需 必需 必需
1) 遵守关于布线 (防护式布线)的规定,请参见第 61 页。
2) 参见 6.2.8 " 连接输出级电源 (CN1)"
3) 长度取决于要求的线路连接干扰的极限值。
4) 参见 6.2.4 " 电机相位连接 (CN10,电机)"
5) 为了连接 RJ45,相对于 D-Sub 接线端子 (.25 mm
6) 取决于波特率,参见 6.2.13 "CAN 连接 (CN4 和 CN5)",RJ45 的允许电缆长度减小到 50%。
2
(AWG22)) 减小了导线横截面,RJ45 上的允许电缆长度减小到 50%。
表 5.1 电缆规格
电机电缆和编码器电缆
电机电缆 20234 型
编码器电缆 20963 型
电机电缆的允许电压 [V
温度范围 [°C] -40 ...+90 (固定布线)
最小弯曲半径 4 x 直径 (固定布线)
电缆包皮 耐油性 PUR
屏蔽 屏蔽编织层
屏蔽编织层的覆盖率 [%] ≥85
] 600 (UL 和 CSA)
ac
-20 ...+80 (可移动)
7,5 x 直径 (可移动)
表 5.2 作为配件提供的电机电缆和编码器电缆参数
电机电缆和编码器电缆均可安装于拖链中,有各种长度可供选用。作为
配件提供的电缆规格可查阅第 311 页。
50 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 51

LXM32A 5 设计
5.3 剩余电流动作保护器
@ 警告
本产品可以在地线内引起直流电流。
当使用剩余电流动作保护器 ( 故障电流保护开关 , RCD) 时,应遵守
相关要求。
若不遵守该规定,可能会导致死亡或严重伤害。
使用剩余电流动作保护器的基本条
件
5.4 在 IT 网络中使用
如果安装规定要求使用剩余电流动作保护器 ( 故障电流保护开关,RCD)
来避免间接或直接接触,或者要求使用故障电流监控器 (RCM),对于连
接在 N 和 L 之间的单相交流伺服驱动放大器,就可以使用 "A 型 " 故
障电流保护器。其它情况下必须使用 "B 型 " 保护器。
请注意下列事项:
• 高频电流过滤。
• 防止因接通时干扰电容器充电可能导致脱扣的延迟。30mA 的剩余电
流动作保护器很少出现延迟。请选择对意外脱扣不敏感的剩余电流
动作保护器 (例如具有增强型抗干扰能力)。
请使用符合下列条件的剩余电流动作保护器:
• 对于单相设备,使用 A 型剩余电流动作保护器:s.i 系列 (超级免
疫,施耐德电气)剩余电流动作保护器。
• 对于三相设备,使用 B 型故障电流保护器:直流和交流灵敏的故障
电流保护器,允许用于变频器。
在使用剩余电流动作保护器时,请注意所连接用电气的漏电电流
本设备设计用于在 TT/TN 网络上操作。不适用于 IT 网络
输出端接地的变压器将 IT 网络转换为 TT/TN 网络。本设备可以连接在
TT/TN 网络上。
允许使用的网络类型请参见 3.3.1 " 输出级 " 一章 (第 25 页)。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 51
Page 52

5 设计 LXM32A
5.5 DC 总线并联连接
@ 警告
谨防毁坏设备部件和失控
如果使用 DC 总线的并联连接不当,可能立即或延迟一段时间后导致
传动系统损坏。
• 请遵守关于 DC 总线并联连接的要求。
若不遵守该规定,可能会导致死亡、严重伤害或财产损失。
工作原理
对这种使用方式的要求
通过并联连接多个设备的 DC 总线,可以在作某些用途时提高能效。电
机延迟时产生了多余的回馈能量,无需连接 DC 总线即可转变成热能。
通过连接多个交流伺服驱动装置的 DC 总线,可以实现能量交换。反馈
的能量可以用于驱动其它电机。在反循环运行模式时,也就是一个电机
延迟,同时另一个电机需要能量时,可以有效利用反馈的能量。
关于并联 DC 总线上多个 LXM32 的要求和临界值,请查阅互联网上的使
用说明 MNA01D001。
52 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 53

LXM32A 5 设计
5.6 电源扼流圈
电源扼流圈
在下列运行条件下必须使用电源扼流圈:
• 当连接在低阻抗供电网络上工作时(电源的最大短路电流大于 3 " 技
术参数 " 一章中描述的值,参见第 25 页)
• 当没有电源扼流圈的驱动放大器额定功率过小时
• 当对驱动放大器使用寿命有特殊要求时 (例如 24 小时运行)
• 当连接在带有无功电流补偿器的电源上工作时
• 用来改善电源输入端上的功率因数,并减小电源扰动
一个电源扼流圈上可以连接多个设备。此时必须注意扼流器的额定电
流。
低阻抗供电网络会在电源输入端产生电流高次谐波。很高的电流谐波也
会使内部 DC 总线电容承受极大负荷。DC 总线电容的负荷对设备使用寿
命有很大影响
关于本主题的其它信息 页
电源扼流圈 (配件)技术参数 38
电源扼流圈 (配件)的装配 70
电源扼流圈 (配件)的电气安装 83
电源扼流圈 (配件)的订货数据 316
0198441113759, V1.01, 09.2009
交流伺服驱动装置 53
Page 54

5 设计 LXM32A
5.7 电源滤波器
极限值
如果在安装时遵守本用户手册中所描述的电磁兼容性规范,本产品便满
足 IEC 61800-3 标准的电磁兼容性要求。
如果选择的组合没有规定 C1 类别,则请注意以下提示:
@ 警告
高频干扰
本产品可能会在居住环境中引起高频干扰,可能需要采取抗干扰措
施。
若不遵守该规定,可能会导致死亡或严重伤害。
有关本产品遵守的类别,请参见技术参数 (第 36 页)。
视设备、应用以及结构而定,可能会达到更好的效果,例如安装在一个
有 15dB 衰减的封闭控制柜中。
所有驱动放大器均有一个内置的电源滤波器。
当电机电缆较长时,还需要使用外部电源滤波器。在使用外部电源滤波
器时,使用者应确保遵守电磁兼容性规范。
如果使用在 12.15 " 外部电源滤波器 " 一章中提供的外部电源滤波器,
则应遵守 3.3.7 " 电源滤波器 (配件)" 一章 (第 37 页)中给定的
极限值。
关于本主题的其它信息 页
外部电源扼流圈 (配件)技术参数 37
外部电源扼流圈 (配件)的安装 70
外部电源扼流圈 (配件)的电气安装 83
外部电源扼流圈 (配件)的订货数据 317
54 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 55

LXM32A 5 设计
5.7.1 关闭 Y 电容器
内部 Y 电容器的接地连接可以断开(关闭)。通常情况下,不必断开 Y
电容器的接地连接。
1a
1b
图 5.2 启用 / 关闭内部 Y 电容器的螺栓
卸下螺栓即可关闭 Y 电容器,参见 图 5.2。存放好螺栓,以便在必要
时重新激活 Y 电容器。
提示:如果关闭了 Y 电容器,给定的电磁兼容性极限值也不再适用。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 55
Page 56

5 设计 LXM32A
5.8 确定制动电阻参数
@ 警告
未制动的电机
容量不充分的制动电阻会造成 DC 总线过压并关闭输出级。从而将无
法再对电机进行制动。
• 请确保制动电阻有足够大的设计容量。
• 检查制动电阻的参数设置。
• 通过试验,检查在最为不利的情况下的 I
100% 时,本设备关机。
• 进行计算和试验时请注意:当电源电压较高时,DC 总线上的电容
器的制动容量较少。
若不遵守该规定,可能会导致死亡、严重伤害或财产损失。
2
t 值。当 I2t 值为
@ 警告
热表面
视运行情况而异,制动电阻温度可能会升高到 250°C (482°F) 以
上。
• 请采取措施防止触碰制动电阻。
• 请勿让可燃或者不耐高温的部件靠近制动电阻。
• 请采取措施保持散热良好。
• 通过试验检查在最为不利的情况下制动电阻的温度。
若不遵守该规定,可能会导致死亡、严重伤害或财产损失。
制动电阻对于动态用途是必需的。在延迟的这段时间内,电机内部的动
能转化为电能。电能提高了 DC 总线的电压。超过预设的极限值时,制
动电阻便会接通。电能在制动电阻中转化为热能。如果制动时需要高动
力,必须调整制动电阻以良好地适应设备。
关于本主题的其它信息 页
技术参数 3.3.5 " 制动电阻 " 34
装配 " 外部制动电阻 " (配件) 70
电气安装:6.2.7 " 制动电阻连接 (CN8,Braking Resistor)"
(配件)
设置制动电阻的参数 123
外部制动电阻 (配件)的订货数据 311
81
5.8.1 内部制动电阻
驱动放大器中安装有一个吸收制动能量的制动电阻。在交货时,该内部
制动电阻已激活。
5.8.2 外接制动电阻
当必须对电机进行紧急制动且内部制动电阻无法再吸收多余的制动能量
时,就需要使用外部制动电阻。
56 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 57

LXM32A 5 设计
监测
选择外接制动电阻
连接制动电阻
本设备监测制动电阻的功率。可以读取制动电阻的负载状况。
外部制动电阻的接线端子有短路保护。当接地时没有任何保护。
外部制动电阻的大小由制动电阻的允许峰值功率和恒定功率决定。
电阻值 R [Ω] 可从所需峰值功率和 DC 总线电压算出。
R = U2 / P
图 5.3 外部制动电阻的额定阻值 R 的算式
max
U :
P
max
R:
开关阈
:
所需峰值功率
电阻
[Ohm]
[V]
[W]
如果要连接两个或者多个电阻,请注意以下条件:
• 必须将这些电阻并联或者串联,以达到所需的阻值。只能并联电阻
值相同的电阻,从而均匀地向所有制动电阻施加负荷。
• 外接电阻的阻值不得低于下限值,参见 3.3.5 " 制动电阻 " 一章。
• 必须计算出所连接制动电阻网络的恒定功率。结果必须大于或等于
实际所需的恒定功率。
只能使用专门设计为制动电阻的电阻器。符合这一要求的制动电阻请参
见316。
通过一个参数实现内部和外部制动电阻之间的切换。在进行调试时,必
须测试制动电阻在实际使用条件下的性能,参见 110。
5.8.3 参数选择帮助
内部能量吸收
采用 IP65 防护级的制动电阻可以安装在相应的环境中,也可以安装在
控制柜的外部。
外接制动电阻附带有一张说明表,其中有关于安装的详细说明。
关于功能和电气安装的说明请参见 56。
选择参数时要计算吸收制动能量的分量。
如果需要吸收的动能超过内部分量之和 (包括内部制动电阻),则需要
使用外部制动电阻。
通过以下机理计算在系统内部吸收制动能量:
• DC 总线电容器 E
• 内部制动电阻 E
var
I
• 驱动装置 Eel 的电损耗
• 驱动装置 E
能量 E
取决于制动过程之前的电压与响应阈值之平方差。
var
的机械损耗
mech
制动过程之前的电压取决于电源电压。DC 总线电容所吸收的能量当电
源电压最大时为最小。计算时请使用最大电源电压下的值。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 57
Page 58

5 设计 LXM32A
内部制动电阻的电阻值
电损耗 E
机械损耗 E
el
mech
示例
内部制动电阻的能量吸收主要有两个特性参数:
• 恒定功率 P
表示在制动电阻不过载的情况下,能够连续导出多少
PR
能量。
• 最大能量 E
用来限制瞬间可导出的、较高的功率。
CR
如果在一定时间内超过了恒定功率,制动电阻就必须有相应长的时间保
持无负荷状态。
有关内部制动电阻特性参数 P
和 ECR 的说明,请参见 34。
PR
驱动装置的电损耗 Eel 可从驱动装置的峰值功率估算出。当典型效率为
90% 时,最大损耗大约为峰值功率的 10%。如果制动时流过的电流较
小,则损耗功率也会相应降低。
机械损耗是因设备运行过程中所出现的摩擦阻尼而产生的。如果设备在
没有驱动的情况下停止运动所需的时间比制动设备所需的时间长得多,
则可以忽略机械损耗。从负载力矩和电机应开始进入停止状态时的转速
就可以算出机械损耗。
制动具有下列数据的电机:
• 起始转速:n = 4000 min
• 转子惯量:JR = 4 kgcm
• 负载惯量:JL = 6 kgcm
-1
2
2
通过下式算出需要吸收的能量:
E
= 1/2 * J * (2*π*n * 1/60)
B
2
88 Ws
电损耗和机械损耗可忽略。
在本例中,DC 总线电容器吸收了 23 Ws (具体数值取决于设备型号,
请参见 3 " 技术参数 " 一章)。
内部制动电阻必须吸收其余的 65 Ws。该电阻可以吸收 80 Ws 的动量。
如果对负载进行一次制动,内部制动电阻便足以应付。
如果要循环重复制动过程,则必须考虑恒定功率。如果循环时间大于需
吸收的能量 E
与恒定功率 PPR 之比,则内部制动电阻就足以应付。当
B
频繁制动时,内部制动电阻将不再够用。
本例中,E
之比为 1.3 s。如果循环时间较短,则需要使用一个外
B/PPR
部制动电阻。
58 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 59

LXM32A 5 设计
确定外部制动电阻的参数
n
3
n
2
n
1
D1
D2 D3
0
n
4
M
M
M
t1t2t
3
2
1
t
3
4
t5t6t7t8t
T
C
0
M
4
M
5
图 5.4 用于确定制动电阻参数的特性曲线
9
t
10
t11t
12
t
t
这两条特性曲线也可在确定电机参数时使用。需要加以考虑的特性曲线
区段,即电机制动区段,均采用符号 (D
i
)。
计算稳定减速时的能量:
此时必须已知总惯量 (J
计算 J
J
的公式为:
t
= Jm + J
t
c
t
)。
Jm:配有或者没有制动器的电机惯量
J
:负载惯量
c
每一段延迟区段的能量计算方法如下 :
2
2π
n
t
i
60
2
(不考虑内部或者外
var
从中得出区段 (D
单位:E
为 Ws (瓦秒); Jt 为 kgm2; ω 为弧度; ni 为转 / 分钟。
i
1
2
) … (D3):
1
1
E1 =J
2
1
E2 =J
2
t
t
t
ω
2
i
2π(
2π
60
= Ei =J
n
1
J
2
n3 - n1 )
60
2
1
下表列出了各个驱动调节器的能量吸收容量 E
部制动电阻)。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 59
Page 60
5 设计 LXM32A
继续进行计算时,仅考虑区段 Di,其能量 Ei 超过本设备的吸收容量
(请参见 3.3 " 电气参数 " 一章)。多余的能量 E
者外接)制动电阻导出。
必须通过 (内部或
Di
用以下公式计算 E
E
= Ei - E
Di
var
每一次机器循环的恒定功率 P
Di
(Ws)
:
计算如下:
c
Pc =
Σ
E
Di
ᕾ⦃ᯊ䯈
单位:P
[W] ; EDi [Ws] ;循环时间 T [s]
c
分两个步骤进行选择:
• 制动过程中的最大能量必须小于制动电阻所能吸收的峰值能量:
(E
)<(ECr)。除此之外,不得超出内部制动电阻的恒定功率:
Di
)<(PPr)。如果这些条件均得到满足,则说明内部制动电阻足够
(P
C
用。
• 如果其中某个条件未得到满足,则必须使用外部制动电阻。必须选
择恰当的电阻,使这些条件均得到满足。电阻值必须在规定的最小
和最大电阻值之间,否则将不能使负载可靠制动,或者使设备受损。
外部制动电阻的订货数据请查阅 《配件》一章,第 316 页。
60 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 61

LXM32A 5 设计
5.9 STO 安全功能 ("Safe Torque Off")
有关使用 IEC 61508 标准的基本知识,请参见 43。
5.9.1 定义
STO 安全功能 (IEC 61800-5-2)
停机类型 0 (IEC 60204-1)
停机类型 1 (IEC 60204-1)
5.9.2 功能
工作原理
5.9.3 关于使用安全功能的要求
STO 安全功能 ("Safe Torque Off") 可安全关闭电机转矩。不需要断开
电源电压。不对电机是否停机进行监测。
即关闭向机器驱动元件输送的能量,使机器停机 (非可控停止)。
受控停转,即保持向机器驱动部件输送的能量,以便实现停机。当达到
停止状态时,才会中断电源供应。
通过产品中集成的 STO 安全功能,可以实现停机类型 0" 急停 "
(IEC 60204-1)。利用额外允许使用的紧急停机模块,也可以实现 停机
类型 1。
STO 安全功能是通过两个冗余输入端触发的。将这两个输入端分开接
线,以实现双通道特性。
两个输入端必须同时进行开关操作 (时间偏差 <1s)。将输出级断电并
发出故障信息。然后电机就不会再产生转矩,并且在没有制动的情况下
停止转动。只有在通过 " 故障复位 " 后,才可以重新起动。
即使当仅断开其中某一个输入端或者时间偏差过大时,也会将输出级断
电并发出故障信息。这条故障信息只有通过关机才能复位。
@ 危险
使用不当可导致触电
STO 安全功能 ("Safe Torque Off") 不会使电源断开。DC 总线上的
电压还会继续存在。
• 请通过适当的开关来切断电源,以确保没有电压。
若不遵守该规定,将会导致死亡或严重伤害。
@ 警告
谨防安全功能失灵
使用不当时可能会存在因安全功能失灵而导致的危险。
• 请注意安全功能的使用要求。
若不遵守该规定,可能会导致死亡或严重伤害。
STO 安全功能的输入 (输入 STO_A 和 STO_B )设计为逻辑类型 1。
停机类型 0
停机类型 1
0198441113759, V1.01, 09.2009
交流伺服驱动装置 61
如果是停机类型 0,则驱动装置就在不受控制的情况下停止。如果接近
正在停止的机器有危险 (危险与风险分析得出的结果),则必须采取适
当的措施。
在停机类型 1 时必须触发受控停转。受控停转动作不会受到驱动系统
的监控。在断电或者出现故障时,将无法实现受控停转。通过关闭 STO
安全功能的两个输入端,实现最终断电。在大多数情况下,通过具有安
全时间延迟功能的紧急停机模块控制停止过程。
Page 62

5 设计 LXM32A
止动闸性能
垂直轴,外力
防止意外重新起动
使用安全功能的防护级
防护式布线
触发 STO 安全功能,将会导致时间延迟对于带有保持制动器的电机无
效。电机无法产生保持转矩,就无法度过保持止动闸关闭之前的时间。
请检查是否必须采取额外的措施,例如此行为会导致垂直轴负荷降低。
当可能会引起危险意外运动的外力 (例如重力)作用于驱动装置 (垂
直轴)上时,如果没有采取必要的防坠落装置,就不得开动该驱动装
置。
为了防止因电压恢复而出现电机意外重新起动 (例如在停电之后),参
数 IO_AutoEnable 必须设定为 "off"。请注意:即使是主控制系统
也不得触发危险的重新起动。
确保在生产中没有带电的污染物 (污染等级 2)。导电的污染物可能会
导致安全功能失效。
如果对于 STO 安全功能的两个信号线可能有短路或者横向短路,且这
些短路无法被串联的设备所识别,就必须采用防护式布线。
如果不采用防护式布线,STO 安全功能的两个信号线可能由于电缆受损
而与外部电压连接。如果这两个信号线与外部电压连接, STO 安全功能
就失效。
可采取以下方式进行防护式布线:
• 将这两条信号线布置在不同的电缆中。这些电缆中的其它芯线仅可
输送符合安全特低电压 (PELV) 要求的电压。
• 使用屏蔽电缆。接地屏蔽线可防止信号受到外来电压和干熔断器扰。
• 使用单独接地的屏蔽线。如果电缆中还有其它芯线,则必须通过接
地屏蔽线将这两个信号与这些芯线隔开。
维护计划和安全性计算所需的数据
危险与风险分析
请考虑以下切断电源安全功能数据的维护计划和安全计算:
使用寿命 (IEC 61508) 20 年
SFF (IEC 61508)
Safe Failure Fraction
HFT (IEC 61508)
Hardware Fault Tolerance
类型 A 零件系统
安全集成电平
IEC 61508
IEC 62061
PFH (IEC 61508)
Probability of Dangerous
Hardware Failure per Hour
PL (ISO 13849-1)
Performance Level
(ISO 13849-1)
MTTF
d
Mean Time to Dangerous Failure
DC (ISO 13849-1)
Diagnostic Coverage
[%] 88.6
1
SIL3
SILCL3
[1/h] 8.6*10
e (分类 3)
1504 年
[%] 90
-10
作为设备制造商,您必须对设备进行危险与风险分析。在使用 STO 安
全功能时必须考虑这些分析结果。
由分析所得出的线路布置可能与下列应用示例有所不同。也有可能得出
需要添加安全组件的结论。原则上应将危险与风险分析结果摆在优先考
虑的地位。
62 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 63

LXM32A 5 设计
5.9.4 STO 应用示例
停机类型 0 示例
没有紧急停机模块的线路布置,停机类型 0。
图 5.5 停机类型 0 示例
要求紧急停机。此要求导致停机类型 0 的发生:
• 通过切断电源安全功能的输入端 STO_A
停机类型 1 示例
24V 24V
24V 24V 24V
带有紧急停机模块的线路布置,停机类型 1。
24V
24V
ENABLE
FAULT RESET
PLC
㋻ᗹ
STO_A
STO_B
和 STO_B 立即关闭输出
级。无法再向电机供电。如果电机此时没有停止,则不受控停止
(非可控停止)。
M
3~
㋻ᗹ
Y+
37
47
57 58
03
13
23
S31
S21
S22
S32
Preventa
XPS-AV
ᓊ䖳
ϡᓊ䖳
Y64
Y74
Y84
38
48
04
14
24
S11
S12
S13
S14
A2A1
ENABLE
FAULT RESET
PLC
HALT
STO_A
STO_B
图 5.6 有外部 Preventa XPS-AV 紧急停机模块的停机类型 1 示例
要求紧急停机。此要求导致停机类型 1 的发生:
• 通过输入 HALT
可立即(无时间延迟)启动 " 停止 " 动作(单通道,
不监控)。根据设置的斜率,使主动动作延迟。
• 利用安全断开扭矩安全功能 (STO_A
) 和 (STO_B) 的输入端,在
紧急停机模块上设置的延迟时间过后将输出级关闭。无法再向电机
供电。如果电机此时还没有停止,则将不受控停止 (非可控停止)。
M
3~
提示:如果在紧急停机模块上安装有继电器输出端,则必须满足所规定
的最小电流和允许最大电流。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 63
Page 64

5 设计 LXM32A
5.10 逻辑类型
@ 警告
意外运行
当使用逻辑类型 2 时,会将信号接地短路识别为接通状态。
• 布线时要特别谨慎,避免接地短路。
若不遵守该规定,可能会导致死亡、严重伤害或财产损失。
本产品的数字输入和输出可以布线成为逻辑类型 1 或 2。
1 2
特殊情况:STO 安全功能
+24V
0V
图 5.7 逻辑类型
逻辑类型 激活状态
(1) 逻辑类型 1 输出提供电流 (Source)
(2) 逻辑类型 2 出口吸引电流 (Sink)
DQ_COM
DQ0,DQ1,...
DI0,DI1,...
DI_COM
电流流入输入
电流从输入流出
+24V
0V
DQ_COM
DQ0,DQ1,...
DI0,DI1,...
DI_COM
信号输入端具有反极性保护,输出端为抗短路型。输入和输出有电流隔
离。
使用 DI_COM 和 DQ_COM 确定逻辑类型,参见图 5.7。逻辑类型对传
感器的布线与控制有直接影响,因此在进行设计时必须对用途有所了
解,彻底弄清楚为何要如此设置。
STO 安全功能的输入 (输入 STO_A 和 STO_B )设计为逻辑类型 1。
64 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 65

LXM32A 5 设计
5.11 监控功能
本产品中的监测功能可以起到在设备功能失灵时防护本设备和降低风险
的作用。这些监测功能不得用于保护人身安全。
可以实现下列监测功能:
监测 任务
数据连接 连接中断时的故障响应
限位开关信号 监控运行运动范围
跟踪偏差 监控电机位置相对于给定位置的偏差
电机过载 监控电机相线中的电流是否过大
过压与欠压 监控电源是否过压与欠压
过热温度 监控设备是否过热
2
I
t 限制 电机、输出电流、输出功率和制动电阻过载时的功率限制
整流换向 检查电机加速度和有效转矩的可信度
电源相线 监测缺失的电源相线
5.12 可配置的输入和输出
有关监测功能的说明可参阅章节 8.4.7 " 运动监控的功能 "。
@ 警告
失控
限位开关的使用可提供某种程度的保护,从而防范危险 (例如由错
误的给定值引起碰撞机械挡块)。
• 请尽量使用限位开关。
• 检查限位开关连接是否正确。
• 检查限位开关的安装是否符合功能要求。 机械挡块前端所安装的
限位开关位置要适当,即应留有充分的制动距离。
• 要使用限位开关,必须先启用之。
若不遵守该规定,可能会导致死亡、严重伤害或财产损失。
本产品具有数字输入端和输出端,可以对其进行配置。根据运行模式,
这些输入端和输出端有定义的标准配置。这种配置可以根据顾客设备的
需要进行调整。其它信息,请参见 8.4.3 " 数字信号输入和输出的配置
"一章。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 65
Page 66

5 设计 LXM32A
5.13 CAN 现场总线的连接
D-Sub 和 RJ45 插头
6
针对 CAN 现场总线,在现场典型地使用带有 D-Sub 插头的电缆。在控
制柜中采用 RJ45 电缆进行连接的优点是布线简单又快捷。带 RJ45 插头
的 CAN 电缆可将最大容许总线长度减少一半,详见表 6.3,第 95 页
为了将控制柜内部的 RJ45 布线与现场的 D-Sub 布线相连接,可以使用
多路配电器,参见图图 5.8。总配电电缆通过螺钉型端子与多路配电器
连接,通过组合式电缆与设备实现连接。关于电缆,参见 12.6
"CANopen 电缆 " 一章 (第 312 页),多路配电器参见 12.5 "CANopen
插头、分配器、终端电阻 " 一章 (第 312 页)。
2
RJ45
32
2
1
4
图 5.8 控制柜内 RJ45 CAN 总线与现场总线的连接
5
D-SUB
(1) 控制柜内部带有 RJ45 CAN 接口的设备
(2) 带有 RJ45 插头的 CANopen 电缆
(3) 从设备到配电器的连接电缆,例如配电器 TSXCANTDM4 的
TCSCCN4F3M3T
(4) 控制柜中的配电器,例如 TSXCANTDM4 作为四路配电器或者
VW3CANTAP2 作为 RJ45 配电器
(5) 通向控制柜外部总线用户的现场总线电缆 (总配电电缆)连
接到带有螺纹型接线端子的配电器上
(6) 终端电阻 120 Ω RJ45 (TCSCAR013M120)
66 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 67

LXM32A 6 安装
6安装
6
进行机械及电气安装前必须进行设计。基本信息请参见第 45 页的 5 "
设计 " 一章。
@ 警告
失控
• 制造商在开发控制装置时必须考虑潜在的失灵概率,并提供具有
某些关键功能的设备,借助于这些设备,在控制装置失灵时和失
灵后可实现安全状态。关键控制功能如急停、位置限制、电源故
障和重新起动。
• 重要功能必须有单独或冗余控制途径。
• 控制系统包括通信链接。制造商必须考虑通信链接发生意外延时
或故障情况。
• 请遵守事故防范规定及所有适用的安全规定。
• 运行前,单独并彻底检查每台安装了本手册所述产品的设备是否
正常运转。
1)
6.1 机械安装
若不遵守该规定,可能会导致死亡或严重伤害。
1) 美国用户请参阅 NEMA ICS 1.1 (最新版本)Safety Guidelines for the
Application, Installation, and Maintenance of Solid State Control,以及
NEMA ICS 7.1(最新版本)Safety Standards for Construction and Guide for
Selection, Installation for Construction and Operation of AdjustableSpeed Drive Systems。
@ 危险
谨防由于异物或损坏导致触电
产品中的导电异物或者严重损伤可能会引起意外通电。
• 不得使用受损产品。
• 请不要让异物如切屑、螺钉或导线横截面进入产品。
• 请不要使用含异物的产品。
若不遵守该规定,将会导致死亡或严重伤害。
@ 警告
异物会造成安全功能丧失
导电的异物、灰尘或者液体可能会使 STO 安全功能失灵。
• 仅当确实有防止导电污染物的措施时,才可以使用 STO 安全功
能。
若不遵守该规定,可能会导致死亡或严重伤害。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 67
Page 68

6 安装 LXM32A
@ 注意
热表面
运行一段时间后产品金属表面可能会发热,使得温度超过 100°C
(212°F)。
• 因此,请避免触碰金属表面。
• 不要让可燃或者不耐高温的部件靠近。
• 请遵守所规定的散热措施。
若不遵守该规定,可能会导致伤害或财产损失。
6.1.1 设备装配
安装带安全提示的标签
控制柜
安装间距 , 通风
왘 选择与到达国相符的标签。
同时注意到达国的安全规定。
왘 将标签清晰地贴到设备的前面。
控制柜的尺寸设计必须得当,使得所有设备和组件均可以固定安装于其
中,且能够按照电磁兼容性规范进行布线。
控制柜通风装置必须能够将安装在控制柜中的所有设备和组件所产生的
热量排出。
选择设备在控制柜中的安装位置时,请注意以下说明:
• 将设备垂直安装 (±10°)。这样有利于设备通风冷却。
• 保持最低限度的安装间隔,以便通风。避免蓄热。
• 切勿将设备安装在发热源附近。
• 切勿将设备安装在易燃材料上。
• 其它设备和部件所产生的热气流不得将冷却设备的空气加热。
• 当超过热上限 (过热温度)时,驱动放大器的操作就会因为温度过
热而关闭。
• 装配零部件 (外部电源滤波器,电源扼流圈,外部制动电阻)时必
须遵守第 70 页 6.1.2 " 安装电源滤波器、电源扼流圈和制动电阻 "
一章中的规定。
设备连接线需朝上和朝下进行引线。必须遵守最小间隔,以便空气循环
和布线。
68 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 69

LXM32A 6 安装
a
c
d
d
d
d
b
图 6.1 安装间距和空气循环
间距
a ≥ 100 mm
(a ≥ 40 in.)
b ≥ 100 mm
(b ≥ 40 in.)
c ≥ 60 mm
(c ≥ 23,5 in.)
d ≥0mm
(d ≥0 in.)
设备上方的间距
设备下方的间距
设备前方的间距
设备之间保持间距以便保证操作环境温
度:
0 °C ... +50 °C
(32 °F ... 122 °F)
安装设备
紧固孔的尺寸参见 3.2.1 " 尺寸图 " 一章,到第 23 页。
提示:油漆表面有绝缘作用。将设备固定在一块有油漆涂层的安装板上
之前,应先将安装部位上的油漆去除 (露出金属光泽)。
왘 请注意第3 "技术参数"页21一章中描述的环境条件。
왘 将设备垂直安装 (±10°)。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 69
Page 70

6 安装 LXM32A
6.1.2 安装电源滤波器、电源扼流圈和制动电阻
外部电源滤波器
电源扼流圈
所有驱动放大器均有一个内置的电源滤波器。
当电机电缆较长时,还需要使用外部电源滤波器。在使用外部电源滤波
器时,使用者应确保遵守电磁兼容性规范。
关于本主题的其它信息 页
外部电源扼流圈 (配件)技术参数 37
外部电源滤波器的设计 (配件) 54
外部电源扼流圈 (配件)的电气安装 83
外部电源扼流圈 (配件)的订货数据 317
왘 将外部电源滤波器安装在设备上方
在某些运行条件下必须使用电源扼流圈,请参见第 53 页的 5.6 " 电源
扼流圈 " 一章。电源扼流圈附带有一张说明表,其中有关于安装的详细
说明。有关电气安装的提示请参见第 83 页的 6.2.8 " 连接输出级电源
(CN1)" 一章。
通过使用电源扼流圈,可以使设备功率得到更好地发挥,参见第 25 页
的 3.3.1 " 输出级 " 一章。只有当调试时设置了相应的参数,才能实现
更高的功率。
关于本主题的其它信息 页
电源扼流圈 (配件)技术参数 38
电源扼流圈 (配件)的设计 53
电源扼流圈 (配件)的电气安装 83
电源扼流圈 (配件)的订货数据 316
外部制动电阻
@ 警告
热表面
视运行情况而异,制动电阻温度可能会升高到 250°C (482°F) 以
上。
• 请采取措施防止触碰制动电阻。
• 请勿让可燃或者不耐高温的部件靠近制动电阻。
• 请采取措施保持散热良好。
• 通过试验检查在最为不利的情况下制动电阻的温度。
若不遵守该规定,可能会导致死亡、严重伤害或财产损失。
采用 IP65 防护级的制动电阻可以安装在相应的环境中,也可以安装在
控制柜的外部。
70 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 71

LXM32A 6 安装
外接制动电阻附带有一张说明表,其中有关于安装的详细说明。
关于本主题的其它信息 页
制动电阻的技术数据 34
外部制动电阻的装配 (配件) 70
制动电阻的电气装置 (配件) 81
设置制动电阻的参数 123
外部制动电阻 (配件)的订货数据 311
6.2 电气安装
@ 危险
谨防由于异物或损坏导致触电
产品中的导电异物或者严重损伤可能会引起意外通电。
• 不得使用受损产品。
• 请不要让异物如切屑、螺钉或导线横截面进入产品。
• 请不要使用含异物的产品。
若不遵守该规定,将会导致死亡或严重伤害。
@ 危险
谨防接地不良导致触电
无足够的接地会有电击危险。
• 请在施加电压之前将传动系统接地。
• 不要使用线管作为地线,而应将地线装在导管内。
• 地线的截面必须符合相关标准要求。
• 将电缆屏蔽两端接地,但不要将屏蔽当作地线。
若不遵守该规定,将会导致死亡或严重伤害。
@ 警告
本产品可以在地线内引起直流电流。
当使用剩余电流动作保护器 ( 故障电流保护开关 , RCD) 时,应遵守
相关要求。
若不遵守该规定,可能会导致死亡或严重伤害。
有关剩余电流动作保护器的条件,参见第 51 页的 5.3 " 剩余电流动作
保护器 " 一章。
逻辑类型
0198441113759, V1.01, 09.2009
交流伺服驱动装置 71
本产品支持逻辑类型 1 和逻辑类型 2 数字信号。请注意,接线示例主
要针对逻辑类型 1 进行说明。STO 安全功能必须按逻辑类型 1 的方法
进行布线。
Page 72

6 安装 LXM32A
6.2.1 安装程序概况
왘 注意 5 " 设计 " 一章中描述的信息。选择的设置将影响整个安装。
왘 确保所有安装在无电压状态下进行。
按以下顺序进行安装:
连接自 连接于 页
接地 接地螺钉 74
电机相位 CN10 75
止动闸 CN11 79
DC 总线连接 CN9 80
外部制动电阻 CN8 81
输出级电源 CN1 83
电机编码器 (编码器 1) CN3 87
安全功能 STO CN2 88
24 V 控制系统电源 CN2 88
数字输入 / 输出 CN6 91
调试界面 (PC) CN7 93
CAN 现场总线 CN4 94
CAN 现场总线 CN5 94
表 6.1 安装概况
检查安装是否适当。
72 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 73

LXM32A 6 安装
6.2.2 连接概况
CN1
CN3
图 6.2 信号连接概况
接线 配置
1 集成的 HMI
CN1 输出级电源
CN2 24V 控制系统电源和 STO 安全功能
CN3 电机编码器 (编码器 1)
CN4 CAN
CN5 CAN
CN6 数字输入 / 输出
CN7 Modbus (调试界面)
CN8 外部制动电阻
CN9 并行操作 DC 总线接口
CN10 电机相位
CN11 止动闸
CN2
CN6
CN7
CN4
CN5
CN8
CN9
CN10
CN11
表 6.2 信号连接的配置
0198441113759, V1.01, 09.2009
交流伺服驱动装置 73
Page 74

6 安装 LXM32A
6.2.3 连接接地螺钉
@ 危险
谨防接地不良导致触电
本传动系统的漏电电流 >3.5 mA。
• 请使用截面至少为 10 mm
截面与电源线相同的两根地线。请在接地时遵守当地有关规定制
度。
若不遵守该规定,将会导致死亡或严重伤害。
本产品的中间接地螺钉位于前面的底部。
2
(AWG 6) 的地线 (AWG 6),或者使用
왘 将设备接地端子与接地中性点相连。
74 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 75

LXM32A 6 安装
6.2.4 电机相位连接 (CN10,电机)
@ 危险
谨防触电
电机侧口上可能会出现意想不到的高压。
• 当轴旋转时,电机会产生电压。因此,对传动系统进行检修之前,
请采取措施防止电机轴被外源驱动。
• 电机电缆中的交流电压可能会感应到未使用的芯线上。请在电机
电缆的两个末端对未使用的芯线进行绝缘处理。
• 系统制造商对传动系统进行接地时应遵守所有现行相关规定。请
对电机外壳进行接地处理,以此作为对电机电缆接地的补充措施。
若不遵守该规定,将会导致死亡或严重伤害。
@ 警告
意外运动
传动系统可能会因错误连接或其它故障而意外运动。
电缆规格
• 仅使用允许的电机操作设备。即使相似的电机,也有可能因为编
码器系统的调整而发生危险 编码器。
• 即使电源和编码器机械连接牢固,并不表示即可使用它们。
若不遵守该规定,可能会导致死亡、严重伤害或财产损失。
有关电缆的信息,请参见第 49 页的 5.2 " 电缆 " 一章。
屏蔽: 必须两端接地
双绞线: -
PELV: 制动器导线 (白色 BR+ 和灰色 BR-)
必须与 PELV 一致
电缆结构: 参见下表
最大电缆长度: 取决于所要求的导线连接干扰极限值,
参见第 36 页的 3.3.6 " 内部电源滤波
器 " 一章,和第 37 页的 3.3.7 " 电源
滤波器 (配件)" 一章
特点: 包含止动闸导线
导线必须具有足够大的截面,以便能够在故障情况下触发电源接头上的
熔断器。
请务必注意以下指示:
• 仅允许连接原厂电机电缆 (带两股用于连接止动闸的电缆线芯)。
• 即使在不带止动闸的电机上,连接止动闸的电缆线芯也必须通过接
头 CN11 连接到设备上 (感应电压)。
• 注意止动闸电压的极性。
• 止动闸电压受控制系统电源影响 (PELV)。注意控制系统电源电压和
所需止动闸电压之间的偏差。
왘 请使用预成形电缆 (第 311 页),以将接线错误的风险降到最低。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 75
Page 76

6 安装 LXM32A
接线端子 CN10 的特性
装配电缆
LXM32•...
接口横截面 [mm2] 0.75 ...
接线端子螺钉的拧紧扭矩。 [Nm]
([lb.in])
剥线长度 [mm] 6 ... 7
5.3
(AWG 18 ...
AWG 10)
0.68 (6.0)
这些接线端子适用于细丝导线和刚性导线。注意最大允许接口横截面。
记住芯线端套会使导线横截面扩大。小心将导线插入,以便达到最大的
电流负载能力和振动阻力。
请在装配电缆时注意图中所示尺寸。
A
1
BK L1
2a
BK L2
BK L3
GN/YE
WH
GY
2b
C
BK L1 BK L2 BK L3
3
图 6.3 电机电缆的装配步骤 (1-3)
GN/YE
WH
GY
B
A
D
D
76 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 77

LXM32A 6 安装
LXM32•...
A mm 140
B mm 135
C mm 130
Dmm50
왘 (1) 除去长度为 A 长的电缆包皮,参见表格。
왘 (2a) 将屏蔽编织层越过电缆包皮向后翻。屏蔽端子的涂层必须至少
具有长度 D 的实际屏蔽。
(2b) 用热收缩套管保护屏蔽编织层。注意电机电缆的屏蔽编织层必
须大面积覆盖在电磁兼容性屏蔽端子上。
왘 (3) 将止动闸的导线截短为长度 B,三根电机相位电缆截短为长度
C。地线的长度为 A。
即使在不带止动闸的电机上,止动闸的电缆线芯也应连接到设备上
(感应电压)。也可参阅第 79 页的 6.2.5 " 止动闸连接 (CN11,
闸)" 部分。
注意最大允许接口横截面。记住芯线端套会使导线横截面扩大。
监测
该设备监控电机相位:
• 电机相位之间是否短路
• 电机相位和接地线之间是否短路
设备无法识别电机相位和 DC 总线、制动电阻或止动闸导线间的短接。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 77
Page 78

6 安装 LXM32A
电机接线图
M
3~
连接电机电缆
U
+
V
-
W
CN10 Motor
CN11
图 6.4 带止动闸的电机接线图
接线 含义 颜色
U 电机相位 黑色 L1 (BK)
V 电机相位 黑色 L2 (BK)
W 电机相位 黑色 L3 (BK)
PE 地线 绿色 / 黄色 (GN/YE)
BR+ 止动闸 + 白色 (WH)
BR- 止动闸 - 灰色 (GR)
왘 请注意电机电缆的电磁兼容性要求,参见第 46 页。
왘 将电机线芯和地线连接到 CN10 上。注意电机一侧和设备一侧的接
U
V
W
Brake
BR+
BR-
头 U、V、W 和 PE (接地)一致
왘 注意接线端子螺钉的不同拧紧扭矩。
왘 将白色电缆芯线与 CN11 的接头 BR+ 连接,将灰色电缆芯线与接头
BR- 连接 (见第 79 页)。
왘 检查机壳上连接器的定位。
왘 将电缆屏蔽大面积固定在屏蔽端子上。
将电机电缆和编码器电缆从电机一侧铺设到设备上。在集
线连接器上进行更快更简便。
78 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 79

LXM32A 6 安装
6.2.5 止动闸连接 (CN11,闸)
@ 危险
谨防触电
电机侧口上可能会出现意想不到的高压。
• 当轴旋转时,电机会产生电压。因此,对传动系统进行检修之前,
请采取措施防止电机轴被外源驱动。
• 电机电缆中的交流电压可能会感应到未使用的芯线上。请在电机
电缆的两个末端对未使用的芯线进行绝缘处理。
• 系统制造商对传动系统进行接地时应遵守所有现行相关规定。请
对电机外壳进行接地处理,以此作为对电机电缆接地的补充措施。
若不遵守该规定,将会导致死亡或严重伤害。
电机的备用止动闸连接到接头 CN11 上。集成的抱闸控制器在输出级启
用时给制动器通风。输出级禁用时止动闸将关闭。
导线必须具有足够大的截面,以能够触发电源接头上的熔断器。
请务必注意以下指示:
压簧端子 CN11 的属性
• 仅允许连接原厂电机电缆 (带两股用于连接止动闸的电缆线芯)。
• 即使在不带止动闸的电机上,连接止动闸的电缆线芯也必须通过接
头 CN11 连接到设备上 (感应电压)。线芯的另一端必须绝缘。
• 注意止动闸电压的极性。
• 止动闸电压受控制系统电源影响 (PELV)。注意控制系统电源电压和
所需止动闸电压之间的偏差。
LXM32•...
最大接线电流 [A] 1.7
接口横截面 [mm2] 0.75 ... 2.
5 (AWG 18
... AWG 14)
剥线长度 [mm] 12 ... 13
这些接线端子适用于细丝导线和刚性导线。注意最大允许接口横截面。
记住芯线端套会使导线横截面扩大。小心将导线插入,以便达到最大的
电流负载能力和振动阻力。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 79
Page 80

6 安装 LXM32A
止动闸接线图
M
3~
U
V
BR- BR+
W
BR+
BR-
CN10 Motor
CN11
Brake
图 6.5 带止动闸的电机接线图
接线 含义 颜色
U 电机相位 黑色 L1 (BK)
V 电机相位 黑色 L2 (BK)
W 电机相位 黑色 L3 (BK)
PE 地线 绿色 / 黄色 (GN/YE)
BR+ 止动闸 + 白色 (WH)
BR- 止动闸 - 灰色 (GR)
第 75 页的 6.2.4 " 电机相位连接 (CN10,电机)" 一章中描述了电缆
包装、布线和连接的信息。
왘 检查机壳上连接器的定位。
6.2.6 DC 总线连接 (CN9,DC 总线)
@ 警告
谨防毁坏设备部件和失控
如果使用 DC 总线的并联连接不当,可能立即或延迟一段时间后导致
传动系统损坏。
• 请遵守关于 DC 总线并联连接的要求。
若不遵守该规定,可能会导致死亡、严重伤害或财产损失。
对这种使用方式的要求
80 交流伺服驱动装置
关于并联 DC 总线上多个 LXM32 的要求和临界值,请查阅互联网上的使
用说明 MNA01D001。
0198441113759, V1.01, 09.2009
Page 81

LXM32A 6 安装
6.2.7 制动电阻连接 (CN8,Braking Resistor)
@ 警告
未制动的电机
容量不充分的制动电阻会造成 DC 总线过压并关闭输出级。从而将无
法再对电机进行制动。
• 请确保制动电阻有足够大的设计容量。
• 检查制动电阻的参数设置。
• 通过试验,检查在最为不利的情况下的 I
100% 时,本设备关机。
• 进行计算和试验时请注意:当电源电压较高时,DC 总线上的电容
器的制动容量较少。
若不遵守该规定,可能会导致死亡、严重伤害或财产损失。
关于本主题的其它信息 页
制动电阻的技术数据 34
确定制动电阻参数 56
外部制动电阻的装配 (配件) 70
设置制动电阻的参数 123
外部制动电阻 (配件)的订货数据 311
2
t 值。当 I2t 值为
6.2.7.1 内部制动电阻
6.2.7.2 外接制动电阻
电缆规格
本设备中安装有一个吸收制动能量的制动电阻。在交货时,已选用该内
部制动电阻。
当必须对电机进行紧急制动且内部制动电阻无法再吸收多余的制动能量
时,就需要使用外部制动电阻。
外部制动电阻的选择和尺寸在第 56 页的 5.8 " 确定制动电阻参数 " 一
章做了规定。符合的制动电阻请参见第 316 页的 12 " 附件与备件 " 一
章。
有关电缆的信息,请参见第 49 页的 5.2 " 电缆 " 一章。
屏蔽: 必须两端接地
双绞线: -
PELV: -
电缆结构: 导线的最小横截面:与输出级电源的
横截面相同,参见第 83 页。导线必
须具有足够大的截面,以便能够在故
障情况下触发电源接头上的熔断器。
最大电缆长度: 3 m
特点: 热稳定性
12 " 附件与备件 " 一章所推荐的制动电阻为三芯电缆,其长度为
0.75 m 到 3 m。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 81
Page 82

6 安装 LXM32A
接线端子特性
接线图
LXM32•...
接口横截面 [mm2] 0.75 ...
接线端子螺钉的拧紧扭矩。 [Nm]([lb.in]).51 (4.5)
剥线长度 [mm] 10 ... 11
3.3 (AWG 18
... AWG 12)
这些接线端子适用于细丝导线和刚性导线。注意最大允许接口横截面。
记住芯线端套会使导线横截面扩大。
CN8 Braking resistor
PB
PC/-
PB
PC/-
连接外部制动电阻
图 6.6 制动电阻接线图
왘 关闭所有电源电压。 请注意有关电气安装的安全指示。
왘 确保不再有电压存在 (安全提示)
왘 卸下连接盖板。
왘 将制动电阻的 PE (接地)端子接地。
왘 将外部制动电阻连接在设备上,参见 图 6.6。注意接线端子螺钉的
不同拧紧扭矩。
왘 将电缆屏蔽大面积固定在设备底部的屏蔽固定处。
通过参数 RESint_ext 实现内部和外部制动电阻之间的切换。制动电
阻的参数设置,请参见第 123 页的 7.5.10 " 设置制动电阻的参数 " 一
章。请确保,已经连接了选定的电阻。在进行调试时,必须测试制动电
阻在实际使用条件下的功能,请参见第 123 页的 7.5.10 " 设置制动电
阻的参数 " 一章。
82 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 83

LXM32A 6 安装
6.2.8 连接输出级电源 (CN1)
@ 危险
谨防接地不良导致触电
本传动系统的漏电电流 >3.5 mA。
• 请使用截面至少为 10 mm
截面与电源线相同的两根地线。请在接地时遵守当地有关规定制
度。
若不遵守该规定,将会导致死亡或严重伤害。
2
(AWG 6) 的地线 (AWG 6),或者使用
@ 警告
谨防过流保护不充分
• 请使用 " 技术参数 " 一章中所述之外接熔断器。
• 不要将本产品连接在其短路容量超过 " 技术参数 " 一章中所述之最
大允许短路电流的电源上。
若不遵守该规定,可能会导致死亡、严重伤害或财产损失。
电缆规格
注意
错误电源电压引起的故障
错误的电源电压可能会使本产品毁坏。
• 在接通以及配置本产品之前,应先确定其允许使用的电源电压。
若不遵守该规定,可能会导致财产损失。
本产品专用于工业领域,只允许在牢固连接后方可进行操作。
连接设备之前检查允许的电路配置,见第 25 页的 3.3.1 " 输出级 " 一
章。
请注意电缆的适宜性,参见第 49 页,以及电磁兼容性计算连接,参见
第 46 页。
屏蔽: -
双绞线: -
PELV: -
电缆结构: 导线必须具有足够大的截面,以便能
够在故障情况下触发电源接头上的熔
断器。
最大电缆长度: -
特点: -
0198441113759, V1.01, 09.2009
交流伺服驱动装置 83
Page 84

6 安装 LXM32A
接线端子 CN1 的特性
输出级电源连接的前提条件
配件 : 电源扼流圈和外部电源滤波
器
LXM32•...
接口横截面 [mm2] 0.75 ...
接线端子螺钉的拧紧扭矩。 [Nm]([lb.in])0.68 (6.0)
剥线长度 [mm] 6 ... 7
5.3 (AWG 18
... AWG 10)
这些接线端子适用于细丝导线和刚性导线。注意最大允许接口横截面。
记住芯线端套会使导线横截面扩大。小心将导线插入,以便达到最大的
电流负载能力和振动阻力。
请务必注意以下指示:
• 三相设备仅可连接三相电操作。
• 预先接通电路保险丝。推荐值和保险丝类型,参见第 25 页的 3.3.1
"输出级"一章。
• 请注意电磁兼容性的规定。如有必要,请使用过压保护器、电源滤
波器和电源扼流圈,参见第 53 页。
• 使用外部电源滤波器时,如果外部电源滤波器与设备之间的电线长
度超过 200 mm,电线必须屏蔽并且两端接地。
• 请注意 UL 规定的安装要求,参见第 21 页。
• 请使用截面至少为 10 mm
2
(AWG 6),或者使用截面与电源线相同的
两根地线。请在接地时遵守当地有关规定制度。
注意有关电源扼流圈配件和外部电源滤波器配件的信息。
关于本主题的其它信息 页
电源扼流圈 (配件)技术参数 38
电源扼流圈 (配件)的设计 53
电源扼流圈 (配件)的装配 70
电源扼流圈 (配件)的订货数据 316
关于本主题的其它信息 页
外部电源扼流圈 (配件)技术参数 37
外部电源滤波器的设计 (配件) 54
外部电源扼流圈 (配件)的安装 70
外部电源扼流圈 (配件)的订货数据 317
84 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 85

LXM32A 6 安装
连接单相设备
图 6.7 显示了单相设备输出级电源的连接概况。本图中也可看到可用
配件外部电源滤波器和电源扼流圈接线。
L1
N/L2
图 6.7 单相设备输出级电源概况
1 2
S1E1
L1
N/L2
L1'
N/L2'
L1
N/L2
3
(1) 电源扼流圈 (配件)
(2) 外部电源滤波器的安装 (配件)
(3) 驱动放大器
L1
N/L2
CN1 Mains 115-240VAC
图 6.8 单相设备输出级电源接线图
왘
检查网络类型。允许使用的网络类型请参见 3.3.1 " 输出级 " 一章
(第 25 页)。
왘 将电线连接至 ( 图 6.8)。注意接线端子螺钉的不同拧紧扭矩。
왘 检查机壳上连接器的定位。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 85
Page 86

6 安装 LXM32A
连接三相设备
图 6.9 显示了三相设备输出级电源的连接概况。本图中也可看到可用
配件外部电源滤波器和电源扼流圈接线。
1 2
L1
L2
L3
E1
E2
E3
S1
S2
S3
图 6.9 接线图 , 三相设备输出级电源
L1
L2
L3
L1'
L2'
L3'
L1
L2
L3
3
(1) 电源扼流圈 (配件)
(2) 外部电源滤波器的安装 (配件)
(3) 驱动放大器
L1
L2
L3
CN1 Mains 400-480VAC
图 6.10 三相设备输出级电源接线图
왘
检查网络类型。允许使用的网络类型请参见 3.3.1 " 输出级 " 一章
(第 25 页)。
왘 将电线连接至 ( 图 6.10)。注意接线端子螺钉的不同拧紧扭矩。
왘 检查机壳上连接器的定位。
86 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 87

LXM32A 6 安装
6.2.9 电机编码器连接 (CN3)
功能与编码器类型
电缆规格
接线图
电机编码器是一种集成于电机内部的 Hiperface 编码器。它以模拟和
数字两种形式将电机位置传送至设备。
有关电缆的信息,请参见第 49 页的 5.2 " 电缆 " 一章。
屏蔽: 必须两端接地
双绞线: 必需
PELV: 必需
电缆结构: 6*.14 mm
(6*AWG 24 + 2*AWG 20)
最大电缆长度: 100 m
特点: 现场总线电缆不适用于编码器接头。
CN3
A
8
1
B
CN3 Encoder-1
图 6.11 电机编码器接线图
2
+ 2*.34 mm
A
8
7
6
5
4
3
2
1
B
2
针脚 信号 电机,针脚 线对 含义 输入
1 COS+ 9 2 余弦信号 输入
2 REFCOS 5 2 余弦信号基准电压 输入
3 SIN+ 8 3 正弦信号 输入
6 REFSIN 4 3 正弦信号基准电压 输入
4 Data 6 1 接收数据,发送数据 输入
5 Data
7 reserved 4空闲
8 reserved 4空闲
A ENC+10V_OUT 10 5 编码器电源 输出
B ENC_0V 11 5 编码器电源参考电位
SHLD 屏蔽
0198441113759, V1.01, 09.2009
7 1 接收数据,发送数据,反转 输入
交流伺服驱动装置 87
/输
出
/输
出
/输
出
Page 88

6 安装 LXM32A
电机编码器连接
왘 请注意,布线、电缆以及所连接的接口应符合对安全特低电压
(PELV) 的要求。
왘 请注意自第 46 页起的编码器电缆电磁兼容性要求。并确定使用电
位均衡导线进行电位均衡处理。
왘 将插接器与 CN3、编码器 1 相连。
왘 检查机壳上连接器的定位。
将电机电缆和编码器电缆从电机一侧铺设到设备上。在集
线连接器上进行更快更简便。
6.2.10 连接控制系统电源和 STO (CN2、DC 电源和 STO)
谨防电源部件故障导致触电
+24VDC 电源电压与传动系统中的许多可测信号相连。
• 请使用符合安全特低电压要求的电源 (PELV,Protective Extra
Low Voltage)。
• 将电源的负极输出与 PE 相连 (接地)。
若不遵守该规定,将会导致死亡或严重伤害。
@ 危险
安全功能 STO
电缆规格 CN2
注意
接触干扰
产品上的控制系统电源接口没有接通电流限制功能。当通过连接触点
接通电压时,触点可能会损毁或者烧熔。
• 请使用可将输出电流峰值限制在触点所能承受之值的电源模块。
• 请接通电源模块的输入而不是输出电压。
若不遵守该规定,可能会导致财产损失。
@ 警告
谨防安全功能失灵
使用不当时可能会存在因安全功能失灵而导致的危险。
• 请注意安全功能的使用要求。
若不遵守该规定,可能会导致死亡或严重伤害。
有关 STO 安全功能信号的说明,参见 5.9.4 "STO 应用示例 " 一章。如
果不需要安全功能,则输入 STO_A
有关电缆的信息,请参见第 5.2 " 电缆 " 页的 49 一章。
屏蔽: -
双绞线: -
PELV: 必需
最小芯线截面: .75 mm2 (AWG 18)
最大电缆长度: 100 m
和 STO_B 必须与 +24VDC 连接。
1)
88 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 89

LXM32A 6 安装
特点: -
1) 参见 5.9.3 " 关于使用安全功能的要求 "
压簧端子 CN2 的属性
允许的控制系统电源端子电流
LXM32•...
最大接线电流 [A] 16
接口横截面 [mm2] 0.5 ... 2.5
剥线长度 [mm] 12 ... 13
1) 在连接多台设备时,注意最大允许端子电流。
1)
(AWG 20 ...
AWG 14)
这些接线端子适用于细丝导线和刚性导线。注意最大允许接口横截面。
记住芯线端套会使导线横截面扩大。小心将导线插入,以便达到最大的
电流负载能力和振动阻力。
• CN2、Pin 3和7以及CN2、Pin 4和8(参见 图 6.12)可作为 24V/0V
连接用于其它用电器。
1
注意最大允许端子电流( " 压簧端子 CN2
的属性 ")。
• 止动闸输出口电压受控制系统电源影响。请注意,止动闸电流也流
经接线端子。
• 只要控制系统电源尚处于接通状态,则即使切断了输出级电源,也
能保持电机的位置。
1. 在连接器中,必须将 Pin 1 与 Pin 5、 Pin 2 与 Pin 6、Pin 3 与 Pin 7、Pin 4
与 Pin 8 连接在一起。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 89
Page 90

6 安装 LXM32A
接线图
+
~
-
24VDC
CN2 DC Supply / STO
STO_A
STO_B
24V
0V
CN2 DC Supply / STO
图 6.12 控制系统电源接线图
针脚 信号 含义
1, 5 STO_A STO 安全功能 : 双通道连接 , 连接 A
2, 6 STO_B STO 安全功能 : 双通道连接 , 连接 B
3, 7 +24VDC 24 V 控制系统电源
4, 8 0VDC 24V 控制系统电源参考电位 ; STO 参考电位
STO_A
STO_B
24V
0V
15
2
6
3
7
4
8
15
2
6
3
7
4
8
15
2
3
4
6
7
8
STO 安全功能连接
连接控制系统电源
왘 请确保接线、电缆以及所连接的接口均符合对安全特低电压 (PELV)
的要求。
왘 按照第 61 页的5.9 "STO 安全功能 ("Safe Torque Off")"一章中的
规定连接安全功能。
왘 请确保接线、电缆以及所连接的接口均符合对安全特低电压 (PELV)
的要求。
왘 将控制系统电源从电源模块 (PELV) 连接到设备。
왘 将电源模块上的负极输出端接地。
왘 在连接多台设备时,注意最大允许端子电流。
왘 检查机壳上连接器的定位。
90 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 91

LXM32A 6 安装
6.2.11 数字输入 / 输出 (CN6) 端口
该设备具有可设置的输入和输出端。端口的标准占用和可设置占用取决
于选定的运行模式。其它信息,请参见 8.4.3 " 数字信号输入和输出的
配置 " 一章。
电缆规格
压簧端子 CN6 的属性
有关电缆的信息,请参见第 49 页的 5.2 " 电缆 " 一章。
屏蔽: -
双绞线: -
PELV: 必需
电缆结构: .25 mm
最大电缆长度: 30 m
特点:
LXM32•...
接口横截面 [mm2] 0.2 ... 1.0
剥线长度 [mm] 10
2
. (AWG 22)
(AWG 24 ...
AWG 16)
0198441113759, V1.01, 09.2009
交流伺服驱动装置 91
Page 92

6 安装 LXM32A
接线图
CN6 I/O
DQCOM
DQ0
DQ1
DICOM
Dl0/CAP1
Dl1
Dl2
Dl3
6.11
6.12
6.13
6.14
6.21
6.22
6.23
6.24
图 6.13 数字输入 / 输出接线图
针脚 信号
1)
含义 输入 / 输出
CN6.11 DQ_COM 数字输出参考电位
CN6.12 DQ0 X 数字输出 0 输出 (24 V)
CN6.13 DQ1 X 数字输出 1 输出 (24 V)
CN6.14 DI_COM 数字输入参考电位
1) 连接器编码,X= 编码
连接数字输入 / 输出
针脚 信号
1)
含义 输入 / 输出
CN6.21 DI0 / CAP1 X 数字输入 0/ 接触探针 0 输入 (24 V)
CN6.22 DI1 数字输入 1 输入 (24 V)
CN6.23 DI2 数字输入 2 输入 (24 V)
CN6.24 DI3 X 数字输入 3 输入 (24 V)
DI_COM 数字输入参考电位 :
CN6.14
1) 连接器编码,X= 编码
对连接器 CN6.1 和 CN6.2 编码。连接时注意正确顺序。
왘 将数字接线连接在 CN6 上。
왘 检查机壳上连接器的定位。
92 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 93

LXM32A 6 安装
6.2.12 连接装有调试软件的 PC (CN7)
注意
计算机的损坏
将产品上的调试界面直接与 PC 机上的 Gigabit-Ethernet 接口连接
时,可能会损坏 PC 上的接口。
• 请不要将 Ethernet 接口直接与本产品的调试界面相连。
若不遵守该规定,可能会导致财产损失。
电缆规格
连接 PC 机
接线图
有关电缆的信息,请参见第 49 页的 5.2 " 电缆 " 一章。
屏蔽: 必须两端接地
双绞线: 必需
PELV: 必需
电缆结构: 8*.25 mm
最大电缆长度: 100 m
特点: -
2
. (8*AWG 22)
可将 PC 与调试软件连接进行调试。PC 可通过一个双向 USB/RS485 转
换器连接,参见第 311 页的 “配件”。
CN7
CN7
8
1
8
7
6
5
4
3
2
1
图 6.14 装有调试软件的 PC 接线图
针脚 信号 含义 输入 / 输出
1保留 保留 -
2保留 保留 -
3保留 保留 -
6保留 保留 4 MOD_D1 双向发送信号 / 接收信号 RS485 电平
5 MOD_D0 双向发送信号 / 接收信号的反转 RS485 电平
7 MOD+10V_OUT 10V 电源,最大电流 100 mA 输出
8 MOD_0V 相对于 MOD+10V_OUT 的参考电位
0198441113759, V1.01, 09.2009
交流伺服驱动装置 93
Page 94

6 安装 LXM32A
6.2.13 CAN 连接 (CN4 和 CN5)
功能
电缆规格
本设备可连接在 CANopen 和 CANmotion 上。
CAN 总线的多个网络设备可以通过总线电缆相互连接。任何一网络设备
都可传送和接收信息。网络设备之间的数据连续传输。
在进行网络操作之前,必须对网络中的每个设备进行配置。此时网络终
端可获得一个唯一的 7 Bit 节点地址 (node Id),范围在 1 (01
127 (7F
) 之间。在调试时对地址进行设置。
h
) 和
h
现场总线中的所有设备均必须有相同的波特率。关于现场总线的其它信
息,请参见现场总线手册。
有关电缆的信息,请参见第 49 页的 5.2 " 电缆 " 一章。
屏蔽: 必须两端接地
双绞线: 必需
PELV: 必需
电缆结构: 2*.25 mm
2*AWG24)
最大电缆长度: 参见表 6.3
最大长度取决于零件数、波特率、连
接器和信号延时。波特率越高,则总
线电缆就必须越短。
特点: 电缆结构适用于带 D-Sub 连接器的电
缆。对于带 RJ45 连接器的电缆,导
线横截面减小,因此最长的总线长度
也只是 D-Sub 情况下的一半。带 RJ45
连接器的电缆只允许用于控制柜中。
带有主电缆螺栓接头的分配器可作为
配件购买。
2
,2* .20 mm2,(2*AWG 22,
D-Sub 和 RJ45 插头
왘 请使用电位均衡导线,参见第 49 页。
왘 请使用预成形电缆 (第 315 页),以将接线错误的风险降到最低。
针对 CAN 现场总线,在现场典型地使用带有 D-Sub 插头的电缆。在控
制柜中采用 RJ45 电缆进行连接的优点是布线简单又快捷。带 RJ45 插头
的 CAN 电缆可将最大容许总线长度减少一半,详见表 6.3,第 95 页
为了将控制柜内部的 RJ45 布线与现场的 D-Sub 布线相连接,可以使用
多路配电器,参见图图 6.15。总配电电缆通过螺钉型端子与多路配电
器连接,通过组合式电缆与设备实现连接。关于电缆,参见 12.6
"CANopen 电缆 " 一章 (第 312 页),多路配电器参见 12.5 "CANopen
插头、分配器、终端电阻 " 一章 (第 312 页)。
94 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 95

LXM32A 6 安装
2
6
RJ45
2
1
图 6.15 控制柜内 RJ45 CAN 总线与现场总线的连接
32
5
4
D-SUB
(1) 控制柜内部带有 RJ45 CAN 接口的设备
(2) 带有 RJ45 插头的 CANopen 电缆
(3) 从设备到配电器的连接电缆,例如配电器 TSXCANTDM4 的
TCSCCN4F3M3T
(4) 控制柜中的配电器,例如 TSXCANTDM4 作为四路配电器或者
VW3CANTAP2 作为 RJ45 配电器
(5) 通向控制柜外部总线用户的现场总线电缆 (总配电电缆)连
接到带有螺纹型接线端子的配电器上
(6) 终端电阻 120 Ω RJ45 (TCSCAR013M120)
最大 CAN 总线长度
最大总线长度取决于所选用的波特率。说明了在使用带 D-Sub 连接器
的电缆情况下,现场总线最大总长度的参考值。
波特率 [kbit/s] 最大总线长度 [m]
50 1000
125 500
250 250
500 100
1000 20
1) 根据 CANopen 规格,最大总线长度为 4m。实际情况证明,大多数情况下可为
20m。在外界因素影响下此长度可能会缩短。
表 6.3 带 D-Sub 连接的现场总线的最大总线长度
1)
提示:使用带有 RJ45 连接器的电缆时,最大总线长度减半。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 95
Page 96

6 安装 LXM32A
当波特率为 1Mbit/s 时,传输线就限制为 .3m。
终端电阻
接线图
总线电缆束的两端必须要限定。将通过在 CAN_L 和 CAN_H 之间的一
个 120 Ω 终端电阻来完成。
带集成终端电阻的连接器作为配件提供。请参见第 312 页的 12.5
"CANopen 插头、分配器、终端电阻 " 一章。
CN4
8
8
7
6
5
4
1
3
2
1
CN5
8
CAN
1
Run Err
8
7
6
5
4
3
2
1
连接 CANopen
图 6.16 CN4 和 CN5 上的 CANopen 接线图
针脚 信号 含义 输入 / 输出
1 CAN_H CAN 接口 CAN 电平
2 CAN_L CAN 接口 CAN 电平
3 CAN_0V 接地 CAN -
4 ... 8 保留 保留 -
왘 请将 CANopen 电缆用一个 RJ45 连接器连接在 CN4 上(针脚 1、2
和 3)。注意带 RJ45 连接器的电缆的说明和特点。
왘 检查机壳上连接器的定位。
96 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 97

LXM32A 6 安装
6.3 检查安装情况
检查是否已经进行安装:
왘 检查整个传动系统的机械固定:
• 是否遵守了规定的间隔?
• 是否所有紧固螺钉都以规定的扭矩拧紧?
왘 检查电气连接和电缆敷设:
• 所有保护线均已连接了吗?
• 是否所有熔断器都具备正确的数值和合适的型号?
• 是否所有通电电缆的两端都连接并绝缘好 (无裸露的电缆头)?
• 是否所有电缆和插接器均已可靠连接?
• 连接器的机械联锁装置是否正确有效?
• 信号线是否已正确连接?
• 是否所需屏蔽连接都按照电磁兼容性规范进行?
• 已遵照所有电磁兼容性规范了吗?
왘 检查是否控制柜的所有盖板和密封都正确安装,并达到了所需防护
级。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 97
Page 98

6 安装 LXM32A
98 交流伺服驱动装置
0198441113759, V1.01, 09.2009
Page 99

LXM32A 7 调试
7调试
7
本章旨在说明如何对产品进行调试。
7.1 基本信息
按字母顺序排列的参数一览表,详见 " 参数 " 一章。本章
将对几个参数的使用和功能进行详细说明。
@ 危险
使用不当可导致触电
STO 安全功能 ("Safe Torque Off") 不会使电源断开。DC 总线上的
电压还会继续存在。
• 请通过适当的开关来切断电源,以确保没有电压。
若不遵守该规定,将会导致死亡或严重伤害。
@ 危险
运行时的意外后果
当设备起动时,所连接的驱动装置通常均在用户的视线范围之外,无
法直接观察到。
• 只能在没有人员或物料处于运动设备部件的危险区域内且可以安
全启动设备时,方可将设备起动。
若不遵守该规定,将会导致死亡或严重伤害。
@ 警告
意外动作
传动系统的响应特性由所保存的大量数据或者设置所决定。不合适的
设置或数据可以引起意外动作或信号以及使监测功能禁用。
• 切勿通过不明设置或数据操作驱动系统。
• 请检查所保存的数据或者设置。
• 请在调试时,仔细测试全部运行状态和错误情况。
• 更换产品以及改变设置或者数据之后,请检查相关功能。
• 只能在没有人员或物料处于运动设备部件的危险区域内且可以安
全启动设备时,方可将设备起动。
若不遵守该规定,可能会导致死亡、严重伤害或财产损失。
0198441113759, V1.01, 09.2009
交流伺服驱动装置 99
Page 100

7 调试 LXM32A
@ 警告
未制动的电机
当掉电以及出现导致输出级被切断的故障时,电机将无法制动且有可
能会以较高的速度向机械挡块运动。
• 请检查现有的机械系统环境。
• 如有必要,请使用起制动作用的机械止动闸或适当的止动闸。
若不遵守该规定,可能会导致死亡、严重伤害或财产损失。
@ 警告
意外运动
初次操作驱动装置时,可能因接线错误或者参数不恰当而存在意外运
动的危险。
• 请在无耦合负载的情况下进行首次测试。
• 请确保急停按钮功能正常。
• 也要考虑到驱动装置可能会以错误方向运动或者发生振动。
• 只能在没有人员或物料处于运动设备部件的危险区域内且可以安
全启动设备时,方可将设备起动。
若不遵守该规定,可能会导致死亡、严重伤害或财产损失。
@ 注意
热表面
运行一段时间后产品金属表面可能会发热,使得温度超过 100°C
(212°F)。
• 因此,请避免触碰金属表面。
• 不要让可燃或者不耐高温的部件靠近。
• 请遵守所规定的散热措施。
若不遵守该规定,可能会导致伤害或财产损失。
100 交流伺服驱动装置
0198441113759, V1.01, 09.2009
 Loading...
Loading...