

SANYO LC877264A, LC877256A, LC877248A Datasheet

Ordering number : ENN*6719
CMOS IC
LC877264A/56A/48A
8-Bit Single Chip Microcontroller with
64/56/48 KB ROM and 2048-Byte RAM On Chip
Preliminary
Overview
The LC877264A, LC877256A and LC877248A are 8 bit single chip microcontrollers with the following on-chip functional
blocks :
- CPU: operable at a minimum bus cycle time of 100 ns
- On-chip ROM Maximum Capacity : LC877264A 64K bytes
LC877256A 56K bytes
LC877248A 48K bytes
- On-chip RAM capacity: 2048 bytes
- LCD controller / driver
- 16 bit timer / counter (can be divided into two 8 bit timers)
- 16 bit timer / PWM (can be divided into two 8 bit timers)
- Timer fo r use as date / time clock
- Synchronous serial I/O port (with automatic block transmit / receive function)
- Asynchronous / synchronous serial I/O port
- 12-channel × 8-bit AD converter
- Small signal detector
- 14-sour ce 10-vectored interrup t s yst em
All of the above functions are fabricated on a single chip.
Ver.1.04
70899
91400 RM (IM) SK No.6719-1/24

LC877264A/56A/48A
Features
(1) Read-Only Memory (ROM)
- 65536 × 8bits (LC877264A)
- 57344 × 8bits (LC877256A)
- 49152 × 8bits (LC877248A)
(2) Random Access Memory (RAM): 2048 × 9 bits (LC877264A, LC877256A, LC877248A)
(3) Minimum Bus Cycle Time: 100 ns (10 MHz)
Note: The bus cycle time indicates ROM read time.
(4) Minimum Instruction Cycle Time: 300 ns (10MHz)
(5) Ports
- Input/output ports
Data direction programmable for each bit individually : 26 (P1n, P30-P35, P70-P7 3, P 8n)
Data direction programmable in nibble units : 8 (P0n)
(When N-channel open drain output is selected, data can be input in bit units.)
- Input ports : 2 (XT1,XT2)
- LCD ports
Segment output : 48 (S00-S47)
Common output : 4 (COM0-COM3)
Bias terminals for LCD driver 3 (V1-V3)
Other functions
Input/output ports : 48(PAn,PBn,PCn,PDn,P En,P Fn)
Input ports : 7 (PLn)
- Oscillator pins : 2 (CF1,CF2)
- Reset pin : 1 (
- Power supply : 6 (VSS1-3,VDD1-3)
(6) LCD controller
- Seven display modes are available (static, 1/2, 1/3, 1/4 duty × 1/2, 1/3 bias)
- Segment output and common output can be switched to general purpose input/output ports.
(7) Small signal detection (MIC signals etc)
- Counts pulses with the level which is greater than a preset value
- 2 bit counter
(8) Timers
- Timer 0: 16 bit timer / counter with capture register
Mode 0: 2 channel 8-bit timer with programmable 8 bit prescaler and 8 bit capture register
Mode 1: 8 bit timer with 8 bit programmable prescaler and 8 bit capture register + 8 bit
Counter with 8-bit capture register
Mode 2: 16 bit timer with 8 bit programmable prescaler and 16 bit capture register
Mode 3: 16 bit counter with 16 bit capture register
- Timer 1: PWM / 16 bit timer with toggle output function
Mode 0: 2 channel 8 bit timer (with toggle output)
Mode 1: 2 channel 8 bit PWM
Mode 2: 16 bit timer (with toggle output) Toggle output from lower 8 bits is also possible.
Mode 3: 16 bit timer (with toggle output) Lower order 8 bits can be used as PWM.
RES
)
No.6719-2/24

LC877264A/56A/48A
- Base Timer
1) The clock signal can be selected from any of the following :
Sub-clock (32.768kHz crystal oscillator), system clock, and prescaler output from timer 0
2) Interrupts of five different time intervals are possible.
(9) Serial-interface
- SIO 0: 8 bit synchronous serial interface
1) LSB first / MSB first is selectable
2) Internal 8 bit baud-rate generator (fastest clock period 4 / 3 Tcyc)
3) Consecutive automatic data communication (1-256 bits)
- SIO 1: 8 bit asynchronous / synchronous serial interface
Mode 0: Synchronous 8 bit serial IO (2-wire or 3-wire, transmit clock 2–512 Tcyc)
Mode 1: Asynchronous serial IO (half duplex, 8 data bits, 1 stop bit, baud rate 8–2048Tcyc)
Mode 2: Bus mode 1 (start bit, 8 data bits, transmit clock 2–512 Tcyc)
Mode 3: Bus mode 2 (start detection, 8 data bits, stop detection)
(10) AD converter
-8 bits × 12 channels
(11) Re mo te contro l receiver circuit ( connecte d to P73 / I NT3 / T0IN termina l )
-Noise rejection function (noise rejection filter’s time constant can be selected from 1 / 32 / 128 Tcyc)
(12) Watchdog timer
- The watching time period is determined by an external RC.
- Watchdog timer can produce interrupt or system reset
(13) Interrupts: 14 sources, 10 vectors
1) Three priority (low, high a nd highest) multiple inter rupts are supported. During interrupt handling, an eq ual or
lower priority interrupt request is postponed.
2) If interrupt requests to two or more vector addresses occur at once, the higher priority interrupt takes precedence.
In the case of equal priority levels, the vector with the lowest address takes precedence.
No. Vector Selectable Level Interrupt signal
1 00003H X or L INT0
2 0000BH X or L INT1
3 00013H H or L INT2/T0L
4 0001BH H or L INT3/Base timer
5 00023H H or L T0H
6 0002BH H or L T1L/ T1H
7 00033H H or L SIO0
8 0003BH H or L SIO1
9 00043H H or L ADC/MIC
10 0004BH H or L Port 0
• Priority Level : X > H > L
• For equal priority levels, vector with lowest address takes precedence.
(14) Subroutine stack levels: 1024 levels max. Stack is located in RAM.
(15) Multiplication and division
- 16 bit × 8 bit (executed in 5 cycles)
- 24 bit × 16 bit (12 cycles)
- 16 bit ÷ 8 bit (8 cycles)
- 24 bit ÷ 16 bit (12 cycles)
No.6719-3/24

LC877264A/56A/48A
(16) Oscillation circuits
- On-chip RC oscillation for system clock use.
- CF oscillation for system clock use. (Rf built in, Rd external)
- Crystal oscillation low speed system clock use. (Rf built in, Rd external)
(17) Standby function
- HALT mode
HALT mode is used to reduce power consumption. During the HALT mode, program execution is stopped but
peripheral circuits keep operating (some parts of serial transfer operation stop.)
1) Oscillation circuits are not stopped automatically.
2) Released by the system reset or interrupts.
-HOLD mode
HOLD mode is used to reduce power consumption. Program execution and peripheral circuits are stopped.
1) CF, RC and crystal oscillation circuits stop automatically.
2) Released by any of the following conditions.
(1) Low level input to the reset pin
(2) Specified level input to one of INT0, INT1, INT2
(3) Port 0 interrupt
-X’tal HOLD made
X’tal HOLD mode is used to reduce power consumption. Program execution is stopped.
All peripheral circuits except the base timer are stopped.
1) CF and RC oscillation circuits stop automatically.
2) Crystal oscillator operation is kept in its state at HOLD mode inception.
3) Released by any of the following conditions
(1) Low level input to the reset pin
(2) Specified level input to one of INT0, INT1, INT2
(3) Port 0 interrupt
(4) Base-timer interrupt
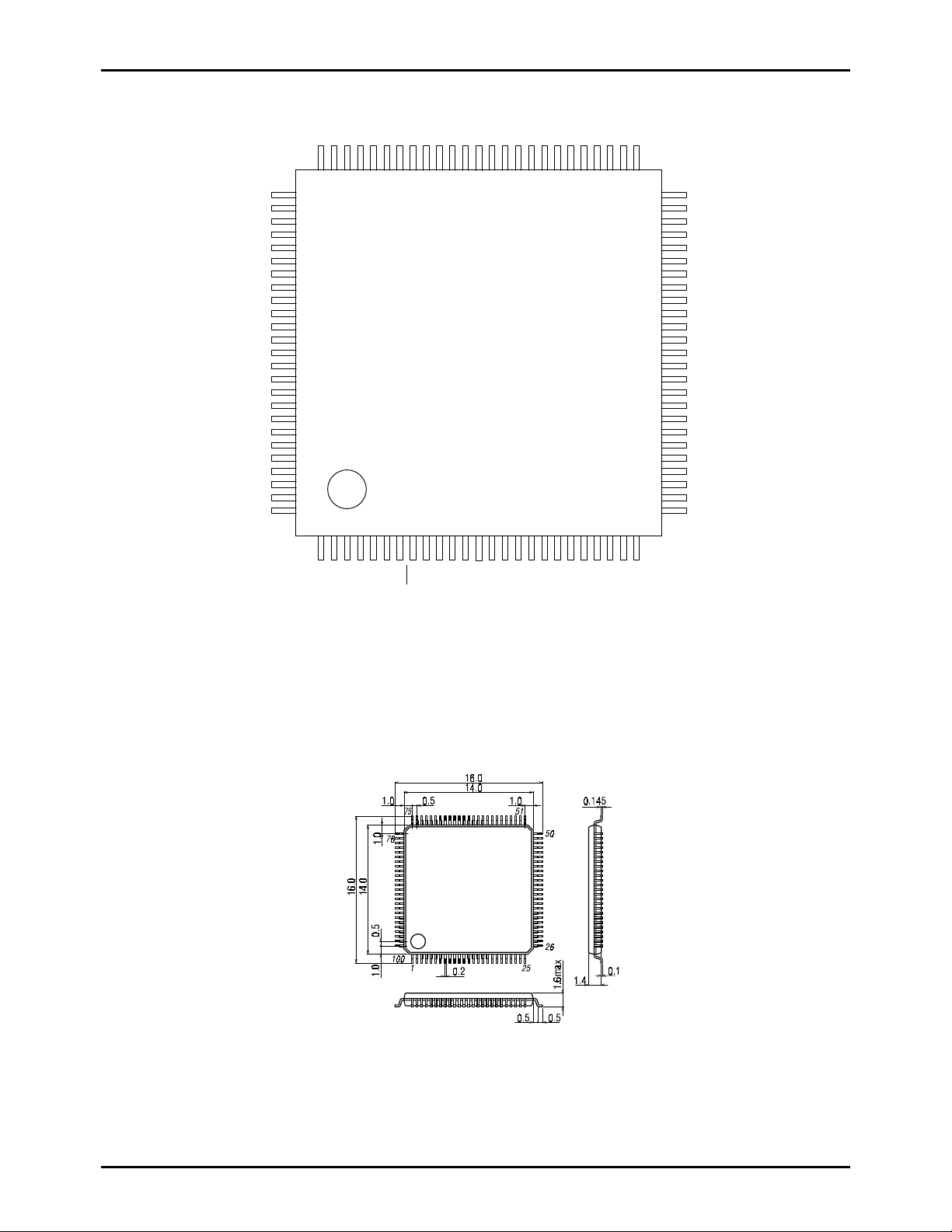
(18) Package
- QIP100E
- SQFP100
(19) Development tools
- Evaluation chip : LC876096
- Emulator: EVA62S + ECB876500 (Evaluation chip board) + SUB877200 + POD100QIP
or POD100SQFP (Type B)
- Flash ROM version: LC87F72C8A
No.6719-4/24

Pin Assignment
L
Z
N
N
N
V2/PL5
V1/PL4
COM0/PL0
COM1/PL1
COM2/PL2
COM3/PL3
P30
P31
VSS3
VDD3
P32
P33
P34
P35
P00
P01
P02
P03
P04
P05
Package Dimension
(unit : mm)
3151
LC877264A/56A/48A
V3/PL6
S47/PF7
S46/PF6
S45/PF5
S44/PF4
S43/PF3
S42/PF2
S41/PF1
S40/PF0
S39/PE7
S38/PE6
S37/PE5
S36/PE4
S35/PE3
S34/PE2
S33/PE1
S32/PE0
S31/PD7
S30/PD6
S29/PD5
S28/PD4
S27/PD3
S26/PD2
S25/PD1
8079787776757473727170696867666564636261605958575655545352
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
1 2 3 4 5 6 7 8 9
P06
P07
P10/SO0
P13/SO1
P12/SCK0
P11/SI0/SB0
P14/SI1/SB1
P15/SCK1
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
CF1
RES
XT1/AN10
P16/T1PWM
P17/T1PWMH/BU
CF2
VSS1
VDD1
P80/AN0
P81/AN1
P82/AN2
P83/AN3
P84/AN4
P85/AN5
XT2/AN11
P86/AN6
S24/PD0
25
P87/AN7/MICI
VSS2
26
VDD2
S23/PC7
S22/PC6
S21/PC5
51
50
49
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
32
31
27
28
29
30
S0/PA0
P73/INT3/T0I
P72/INT2/T0I
P70/INT0/T0LCP/AN8
P71/INT1/T0HCP/AN9
S20/PC4
S19/PC3
S18/PC2
S17/PC1
S16/PC0
S15/PB7
S14/PB6
S13/PB5
S12/PB4
S11/PB3
S10/PB2
S9/PB1
S8/PB0
S7/PA7
S6/PA6
S5/PA5
S4/PA4
S3/PA3
S2/PA2
S1PA1
SANYO : QIP-100E
SANYO : QIP-100E
No.6719-5/24
LC877264A/56A/48A
L
Z
0
6
N
N
Pin Assignment
S47/PF7
V3/PL6
V2/PL5
V1/PL4
COM0/PL0
COM1/PL1
COM2/PL2
COM3/PL3
P30
P31
VSS3
VDD3
P32
P33
P34
P35
P00
P01
P02
P03
P04
P05
P06
P07
P10/SO0
Package Dimension
(unit : mm)
3181B
S46/PF6
S45/PF5
S44/PF4
S43/PF3
S42/PF2
S41/PF1
S40/PF0
S39/PE7
S38/PE6
S37/PE5
S36/PE4
S35/PE3
S34/PE2
S33/PE1
S32/PE0
S31/PD7
S30/PD6
S29/PD5
S28/PD4
S27/PD3
S26/PD2
75747372717069686766656463626160595857565554535251
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
1 2 3 4 5 6 7 8 9
P13/SO1
P12/SCK0
P14/SI1/SB1
P15/SCK1
P16/T1PWM
P11/SI0/SB0
10
11
12
13
14
15
16
17
18
19
20
21
CF1
RES
XT1/AN10
P17/T1PWMH/BU
CF2
VSS1
VDD1
P81/AN1
P82/AN2P83/AN3
P84/AN4P85/AN5
XT2/AN11
P80/AN
P86/AN
S25/PD1
22
P87/AN7/MICI
S24/PD0
23
P70/INT0/T0LCP/AN8
VSS2
24
P71/INT1/T0HCP/AN9
VDD2
25
P72/INT2/T0I
50
49
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
S23/PC7
S22/PC6
S21/PC5
S20/PC4
S19/PC3
S18/PC2
S17/PC1
S16/PC0
S15/PB7
S14/PB6
S13/PB5
S12/PB4
S11/PB3
S10/PB2
S9/PB1
S8/PB0
S7/PA7
S6/PA6
S5/PA5
S4/PA4
S3/PA3
S2/PA2
S1PA1
S0/PA0
P73/INT3/T0IN
SANYO : SQFP-100
SANYO : SQFP-100
No.6719-6/24
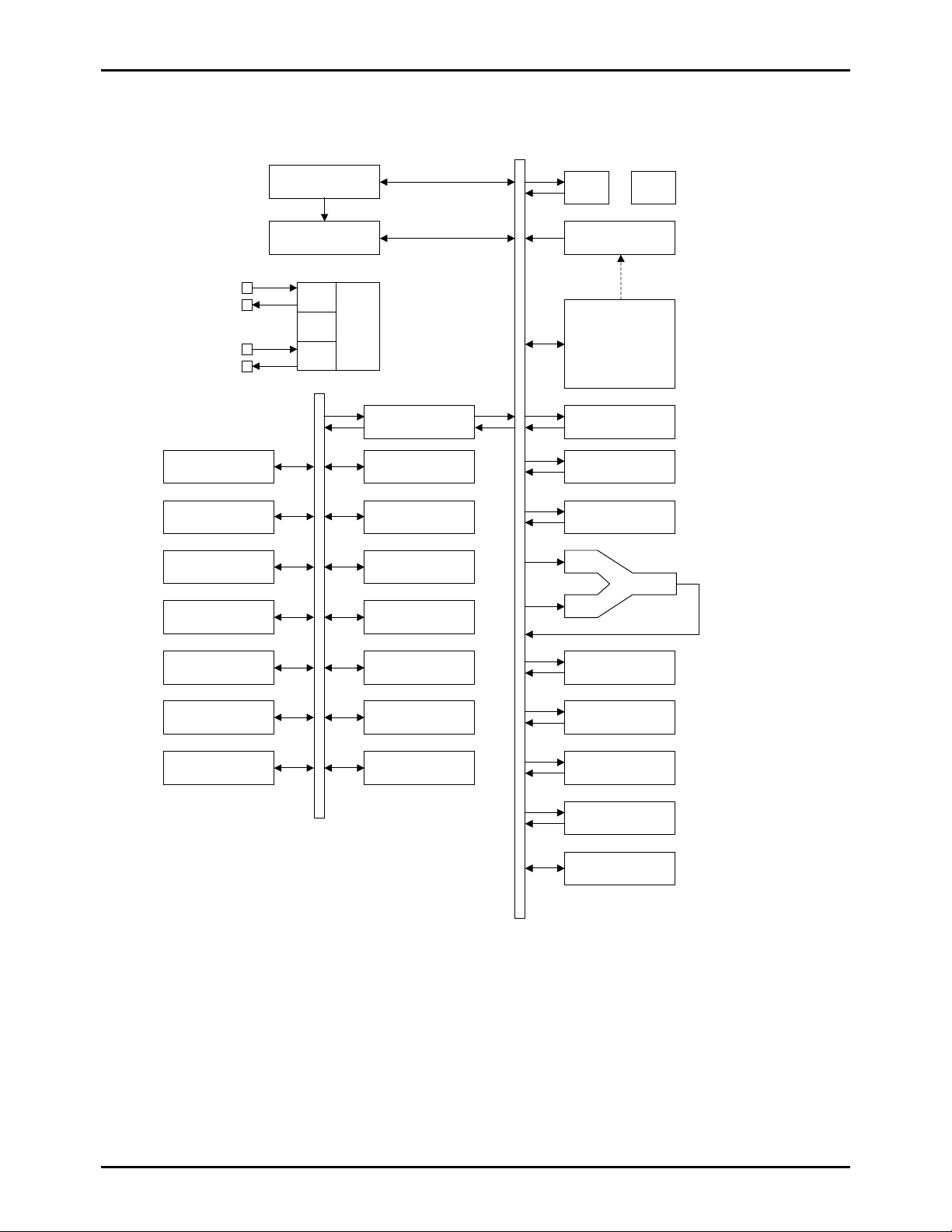
System Bl ock Diagram
SIO0
SIO1
Timer 0
Timer 1
Base Timer
LCD Controller
INT0 - 3
Noise Rejection Filter
Interrupt Control
Stand-by Control
CF
RC
X’tal
LC877264A/56A/48A
Clock
Generator
Bus Interface
Port 0
Port 1
Port 3
Port 7
Port 8
ADC
Weak Signa Detector
IR PLA
ROM
PC
ACC
B Register
C Register
ALU
PSW
RAR
RAM
Stack Pointer
Watch Dog Timer
No.6719-7/24

LC877264A/56A/48A
Pin Assignment
Pin name I/O Function Option
VSS1
VSS2
VSS3
VDD1
VDD2
VDD3
PORT0
P00 to P07
PORT1
P10 to P17
PORT3
P30 to P35
PORT7
P70 to P73
- • Power supply (-) No
- • Power supply (+) No
I/O • 8bit input/output port
• Data direction programmable in nibble units
• Use of pull-up resistor can be specified in nibble units
• Input for HOLD release
• Input for port 0 interrupt
I/O • 8bit input/output port
• Data direction pr ogrammable for each bit
• Use of pull-up resistor can be specified for each bit individually
• Other pin functions
P10 SIO0 data output
P11 SIO0 data input or bus input/output
P12 SIO0 clock input/output
P13 SIO1 data output
P14 SIO1 data input or bus input/output
P15 SIO1 clock input/output
P16: Timer 1 PWML output
P17: Timer 1 PWMH output/Buzzer output
I/O • 6bit Input/output port
• Data direction can b e specified for each bit
• Use of pull-up resistor can be specified for each bit individually
• 4bit Input/output port
I/O
• Data direction can b e specified for each bit
• Use of pull-up resistor can be specified for each bit individually
• Other fu nc tions
P70: INT0 input/HOLD release input/Timer0L capture input/output for watchdog
timer
P71: INT1 input/HOLD release input/Timer0H capture input
P72: INT2 input/HOLD release input/timer 0 event input/Timer0L capture input
P73: INT3 input(noise rejection filter attached)/timer 0 event input/Timer0H capture
input
AD input port: AN8(P70), AN9(P71)
• Interrupt detection selection
INT0
INT1
INT2
INT3
Rising Falling
Yes
Yes
Yes
Yes
Yes
Yes
Yes
Yes
Rising and
falling
No
No
Yes
Yes
H level L level
Yes
Yes
No
No
Yes
Yes
No
No
Yes
Yes
Yes
No
No.6719-8/24
 Loading...
Loading...