


STEPPING SYSTEMS
Ve
2 相步进系统
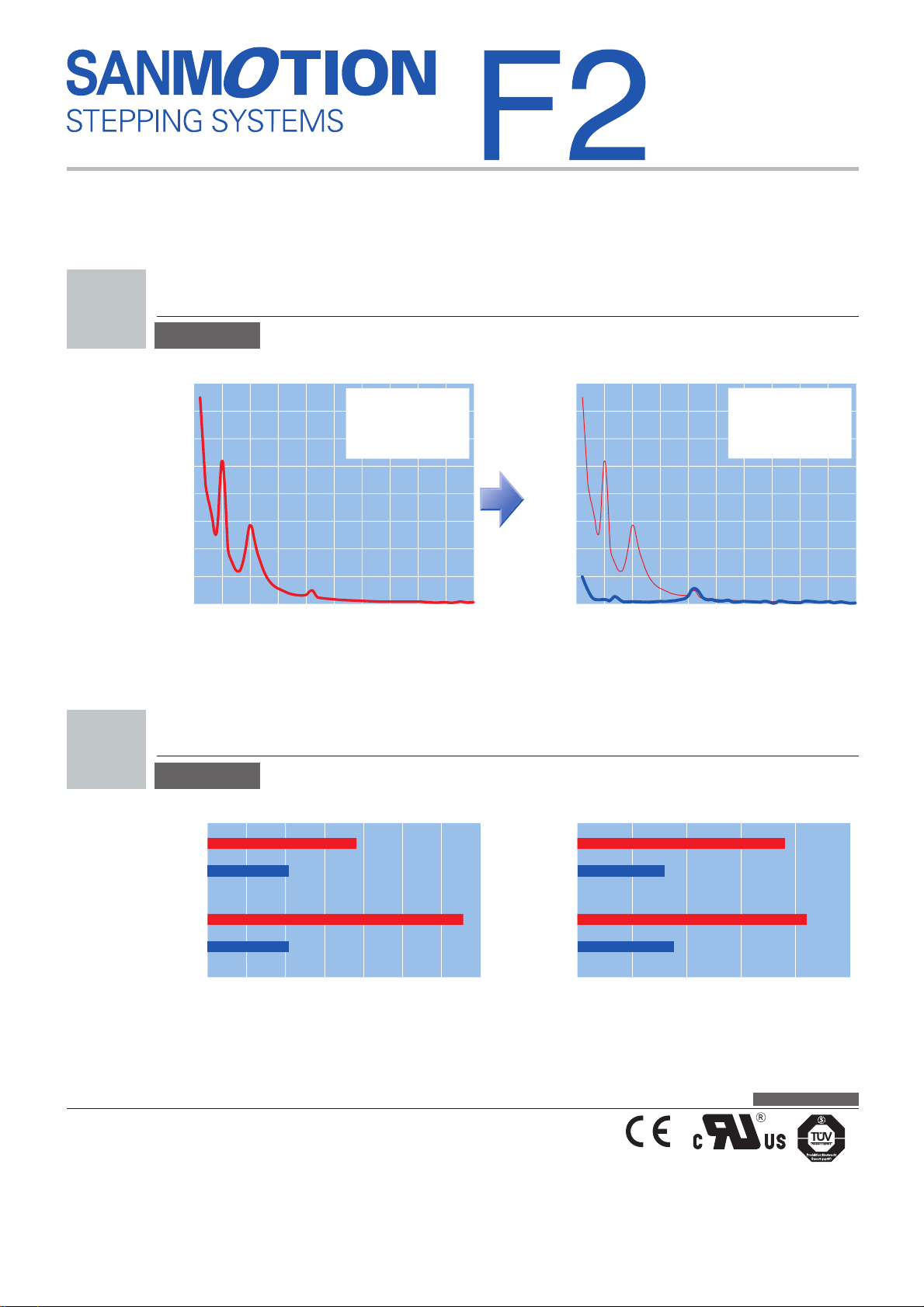
F系列驱动器的特长
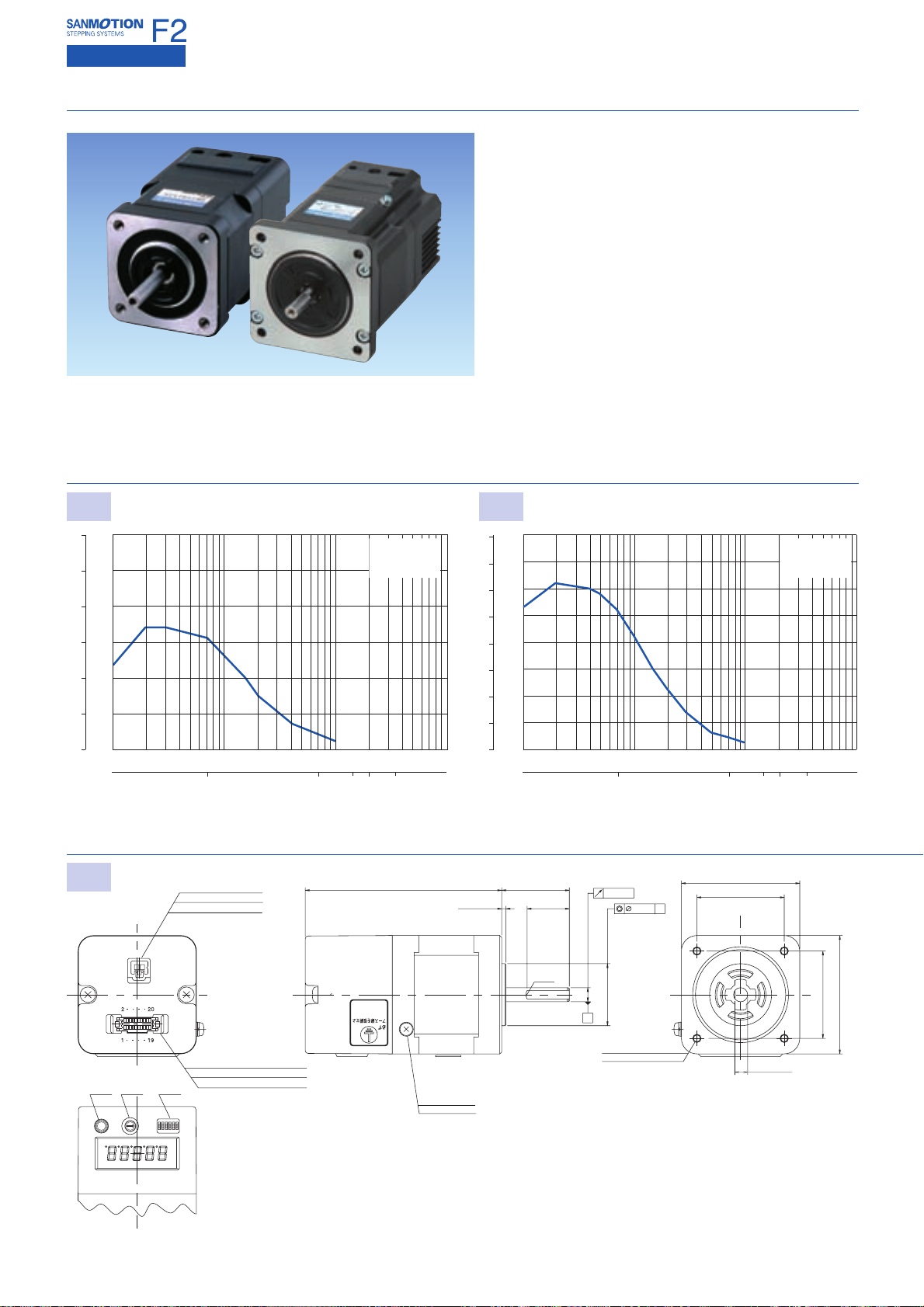
低振动模式
1
DC输入
F series
H series
DRIVER
MOTOR
SH series
MOTOR
2
گናۯఇ๕OFF
1600
1400
1200
1000
܈
Վ
800
ۯ
୲
600
(%)
400
200
0
0
100 200 300 400 500 600 700 800 900 1000
ೕ୲ (pulse/s)
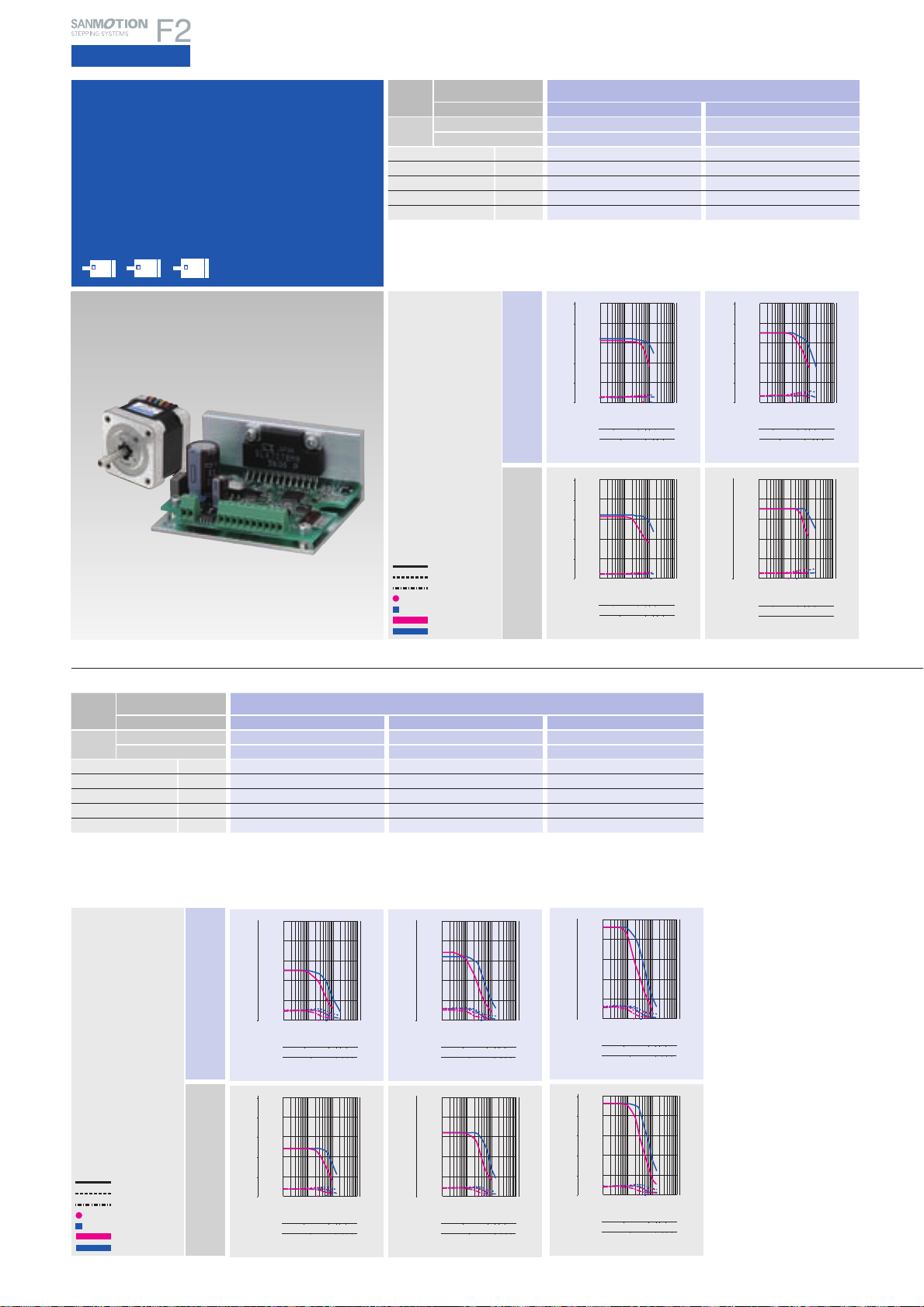
小型 • 轻量
DC输入
ൻۯഗ : US1D200P10
ۉ : 103H7123-0410
ۉᇸۉუ : DC24V
၍ංۉୁ : 2.0A/၎
ݴߪຕ : 2
TG : 11TG (7V/1000rpm)
ၭ႙
1600
1400
1200
1000
܈
Վ
800
ۯ
୲
600
(%)
400
200
0
0 100 200 300 400 500
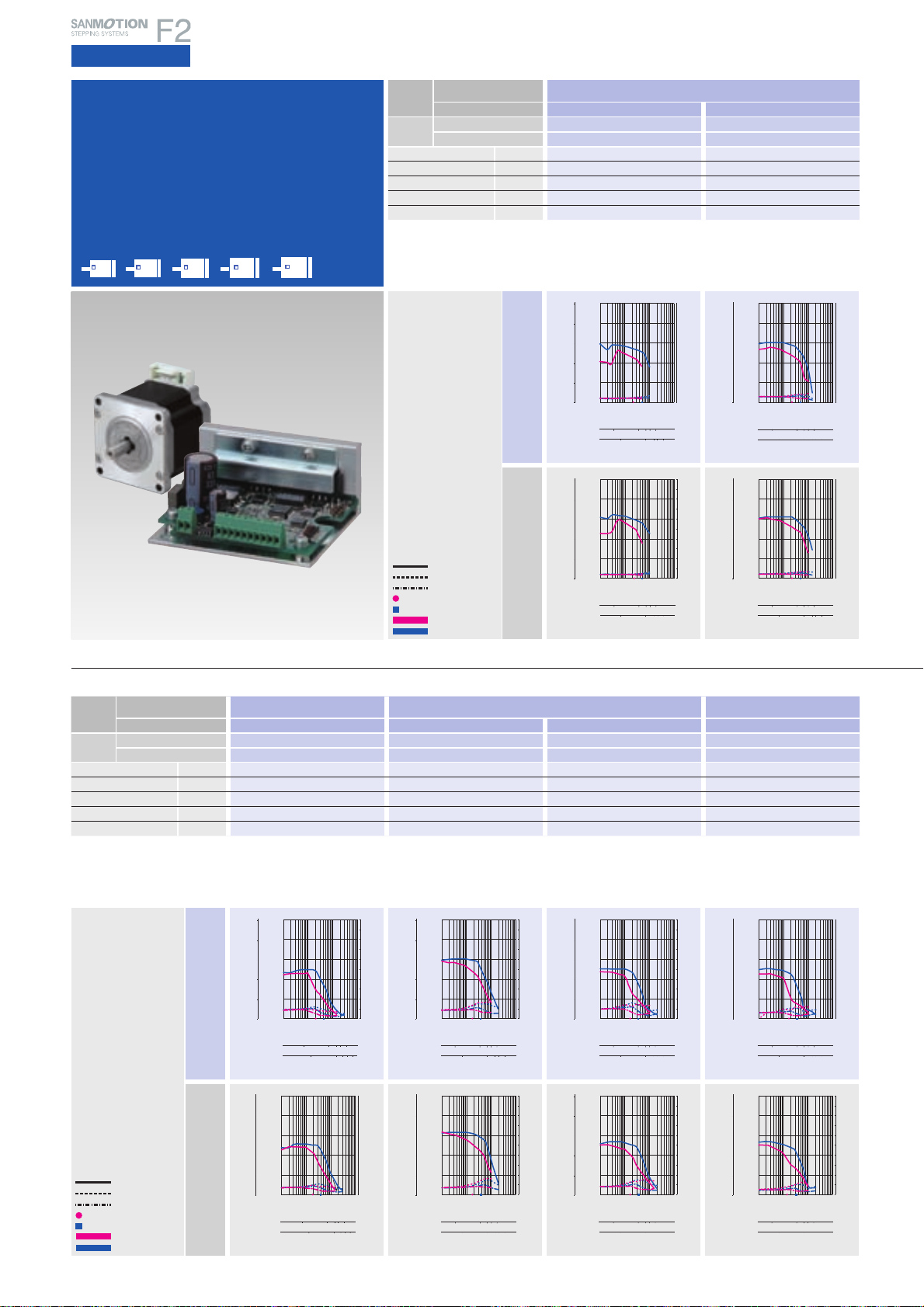
گናۯఇ๕ON
ൻۯഗ : US1D200P10
ۉ : 103H7123-0410
ۉᇸۉუ : DC24V
၍ංۉୁ : 2.0A/၎
ݴߪຕ : 2
TG : 11TG (7V/1000rpm)
600 700 800 900 1000
ೕ୲ (pulse/s)
ൟଉ
2၎ڇ
ᅜྫׂ
2၎ڇ
Fဣଚ
2၎ມ
ᅜྫׂ
2၎ມ
Fဣଚ
0 50 100 150 200 250 300
༹ (cm3)
依据海外规格
SANMOTION F系列步进驱动器以海外规格 (UL,EN 规格) 作为标准规格。
步进电机可提供海外规格 (UL,EN 规格)。对于EMC指令,备有EMC过滤器。
1
350
2၎ڇ
ᅜྫׂ
2၎ڇ
Fဣଚ
2၎ມ
ᅜྫׂ
2၎ມ
Fဣଚ
0 10050 150 200 250
ዘଉ (ȃ)
DC输入
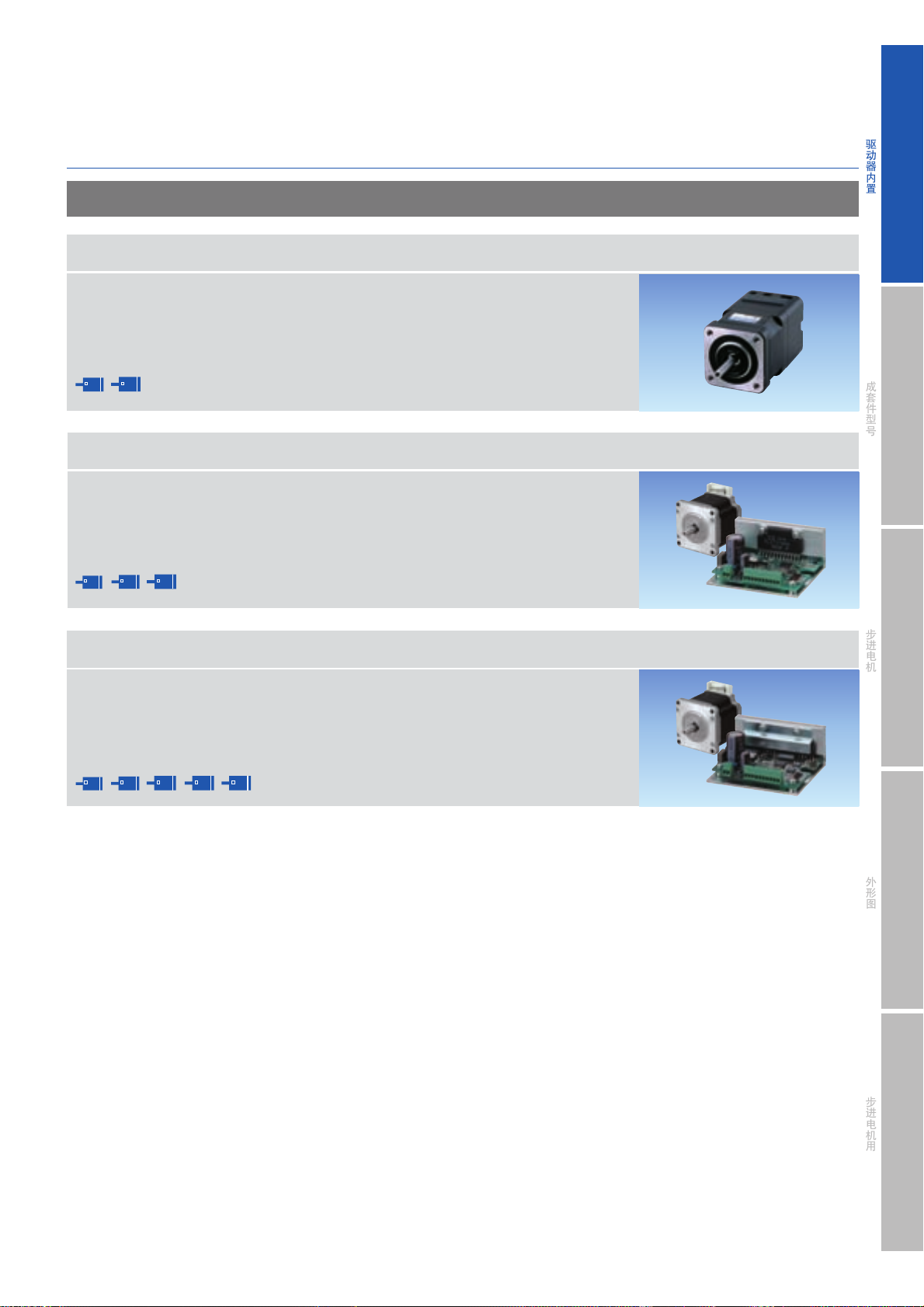
成套件型号
驱动器内置
DC输入
驱动器内置 步进电机
驱动电机所必须的运动控制器、驱动器、电机实现了一体化组装。
ۉ݆ન٫
60
42
单极 标准型号
F系列驱动器和H或SH系列电机的成套件型号。
ۉ݆ન٫
56
42
28
双极 标准型号
F系列驱动器和H或SH系列电机的成套件型号。
P. 4
成套件型号
P.1 3
步进电机
P.1 4
ۉ݆ન٫
28
42
50 56 60
外形图
步进电机用
I
C
2
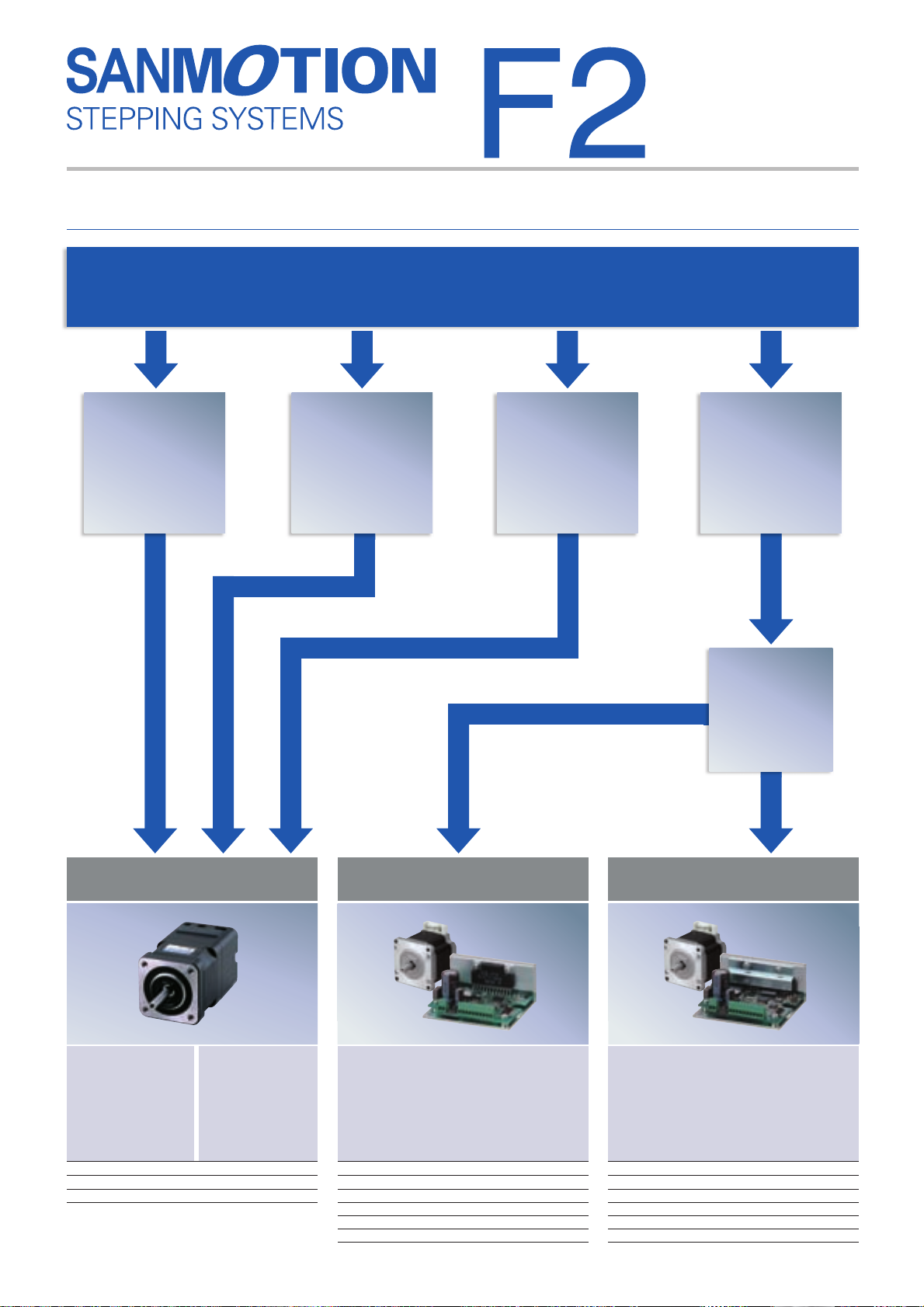
控制方式
如何控制装置?
F系列可选择3种控制方式
F series
H series
DRIVER
MOTOR
SH series
MOTOR
通过PLC的I/O
来进行程序的
指令控制
DC输入
驱动器内置
通过串行通信
(依据RS-485)
来进行网络控制
DC输入
单极
用脉冲发生器
来进行控制
用脉冲发生器
来进行控制
驱动方式
DC输入
双极
通过I/O启动时
通过I/O启动驱动器
中预先存储的速度、
加减速度、移动量的
指令程序。
系统配置图 P4
规格 P6
外形图 P5~6
通过串行通信启动时
通过串行通信的速
度、加减 速度、移
动量等的数据发送
来进行控制。
3
根据从上位控制装置发出的脉冲输入指令
进行动作。
系统配置图 P13~14
成套件型号的辨别 P16
电机规格 P26~46
共通规格 P47~48
电机外形图 P49~51
驱动器外形图 P52
根据从上位控制装置发出的脉冲输入指令
进行动作。
系统配置图 P13~14
成套件型号的辨别 P16
电机规格 P26~46
共通规格 P47~48
电机外形图 P49~51
驱动器外形图 P52
DC输入
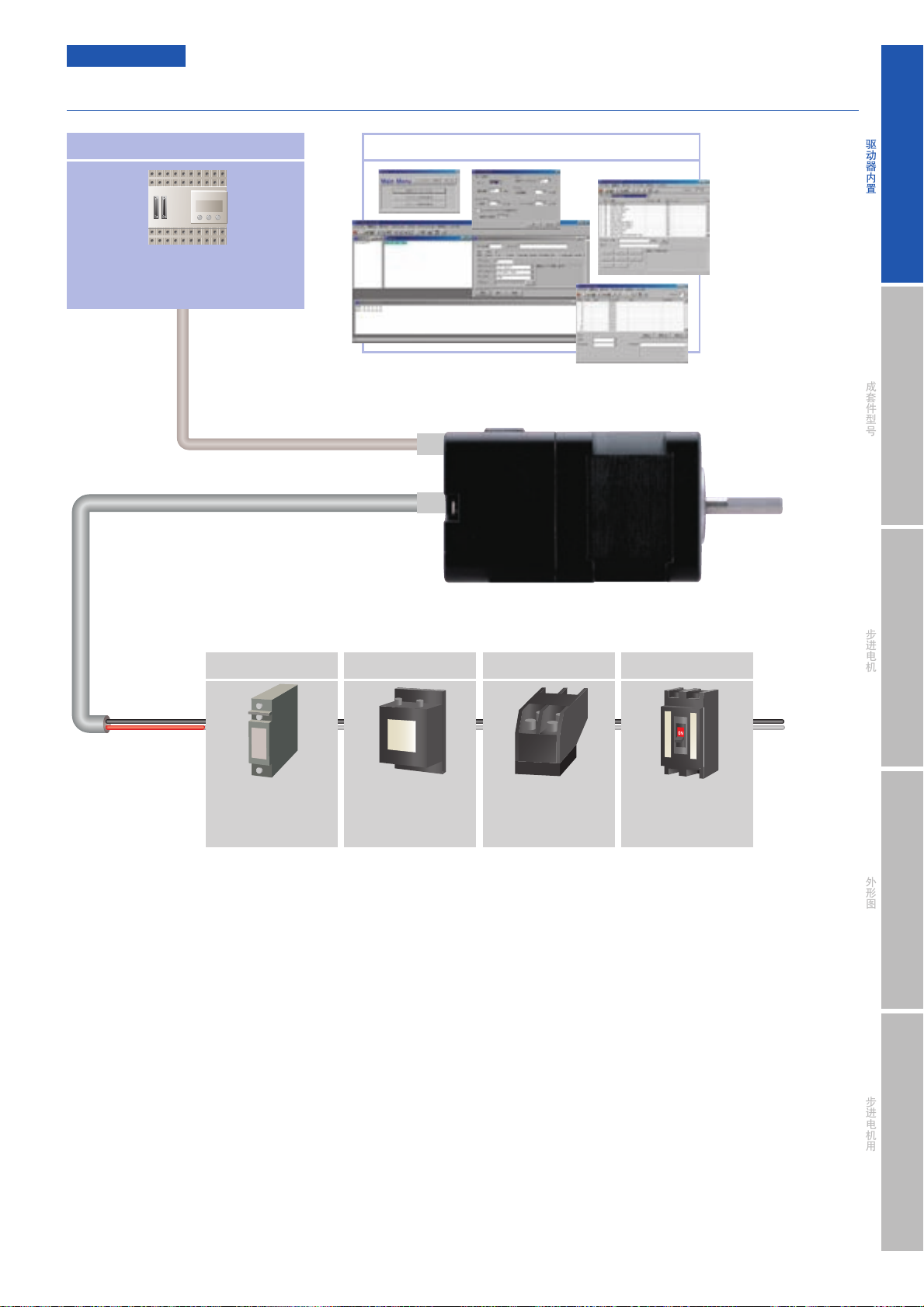
系统配置图
驱动器内置
上位装置
PLC
本公司的上位控制器当然可以使用,
也可与其他公司产品连接。
输入输出信号用电缆 (300mm)
DC电源用电缆 (350mm)
上位软件画面: SFPA1W-02
驱动器内置
成套件型号
※标准附属有输入输出信号用电缆及 DC 电源用
电缆。
开关电源
DC
24V
将交流电源 (AC) 转
换为直流电源 (DC)。
干扰滤波器
防止来自于电源线的
外来干扰
。
电磁接触器
驱动器电源的ON/
OFF。
请安装波涌抑制器后
使用。
配线用断路器
保护电源线路的装置。
如有过电流流通,将
会断开电路。
(t)
(r)
单相
AC100V
~
AC230V
步进电机
外形图
步进电机用
I
C
4
DC 输入
规格
驱动器内置
特性图
特长
1. 驱动器与电机实现了一体化组装。
内置有驱动电机所必须的运动控制功能的驱动器和2相步进电
机。通过一体化组装,可削减“实际安装空间”和“配线工数
2. 可结合用途选择3种运转模式。
(1) 指令脉冲控制
(2) 通用I/O控制 (并行)
(3) 串行通信半双工起止同步 (依据RS485)
”。
□
42
0.6
6
0.5
5
0.4
4
0.3
3
ገ (N · m)
ገ (kgf · cm)
0.2
2
1
0.1
0
0
0.1 1 10 100
ஞ؋ೕ୲ (kpulse/s)
ገ (min-1)
2000 3000 5000100 1000
外形图
□
42
2
1
CN1 : POWER
Manufacturer : JST
CONNECTOR : S02B-PASK-2
DB21M142S-01
E=DC24V
I=ܮۨۉୁ
-4
JL=0.94×10
+2
70
0
ȐȁǿȄȊȅȍȑȁȏNJ
ȃȎȋȑȊȀȅȊȃ
DZȏȁāȌȎȋȌȁȎ
kg·m
□
60
1.6
16
1.4
2
14
1.2
12
1.0
10
0.8
8
ገ (N · m)
ገ (kgf · cm)
0.6
6
0.4
4
0.2
2
0
0
0.1 1 10 100
ஞ؋ೕ୲ (kpulse/s)
ገ (min-1)
2000 3000 5000100 1000
DB21M142S-01
E=DC24V
I=ܮۨۉୁ
-4
JL=0.94×10
kg·m
2
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
42 ± 0.5
31± 0.25
31± 0.25
42 ± 0.5
1.5 ± 0.76
24 ± 0.5
(EFFECTIVE
15
LENGTH)
R3MIN.
+1
0
0.025
-0.013
0
5
-0.05
0
22
A
A
0.05
4-M3×0.5
TAP DEPTH 4MIN.
4.5
± 0.15
RSWPSW DSW
D
C
B
E
A
F
9
0
8
1
7
2
6
3
5
4
1O423N5
CN2 : I/O
Manufacturer : JST
CONNECTOR : SM20B-SHLDS-GW-TF
6
NAME
PLATE
EARTH TERMINAL
M2.5X0.45X4L
5

规格
型号 (法兰尺寸)
※1
输入电源
DB21M142S-01 (
DC24V± 10%
电源电流 (A) 2 MAX. 3 MAX.
保护级别 级别Ⅰ
使用环境 设置范畴 (过电压范畴) : Ⅱ 污损度: 2
适用规格 EN61010-1
※2
0~+40℃
-
20~+60℃
基本规格
使用环境温度
保存温度
使用环境湿度 35 ~ 85% RH (无结露)
环境
保存湿度 10 ~ 90% RH (无结露)
使用高度 海拔1000m 以下
振动 98m/s 频率范围10 ~ 2000Hz X.Y.Z 各方向2H 进行试验
冲击 根据NDS-C-0110 规格3.2.2 项区分“C”,无异常
绝缘耐压 电源输入端子- 机箱间施加AC500V的电压1分钟,无异常
绝缘电阻 电源输入端子- 机箱间DC500V 用兆欧表测定在10MΩ以 上
重量 (kg) 0.5 0.87
功能
输入输出
※ 1
电源电压绝对不能超出 DC24V+10% (DC26.4V)。
※ 2
收纳在盒内的情况下,使用时盒内温度不能超出这一范围。
※ 3
最大输入频率为 250k pulse/s。
保护功能 驱动器过热
LED显示 报警显示
指令脉冲输入信号
衰减输入信号 (PD)
步距角选择输入信号 (EXT)
FULL/HALF 选择输入信号
信号
(F/H)
EMG 输入信号
BUSY 输出信号
相原点显示器输出信号
(MON)
报警输出信号
(AL)
※3
光耦输入方式,
“L”级别: 0~0.5V
光耦输入方式,输入电阻470Ω 输入信号电压“H”级别: 4.0~5.5V
光耦输入方式,输入电阻470Ω 输入信号电压“H”级别: 4.0~5.5V
光耦输入方式,输入电阻470Ω 输入信号电压“H”级别: 4.0~5.5V
光耦输入方式,输入电阻470Ω 输入信号电压“H”级别: 4.0~5.5V
光耦输入方式,输入电阻220Ω 输入信号电压“H”级别: 4.0~5.5V
用光耦的开路集电极输出 输出信号规格Vceo: 30V以下
用光耦的开路集电极输出 输出信号规格Vceo: 30V以下
□
42) DB22M162S-01 (□ 60)
输入电阻220Ω 输入信号电压“H”级别: 4.0~5.5V
“L”级别: 0~0.5V
“L”级别: 0~0.5V
“ L”级别: 0~0.5V
“L”级别: 0~0.5V
“L”级别: 0~0.5V
Ic: 20mA以下
Ic: 20mA以下
驱动器内置
成套件型号
步进电机
□
60
2
1
RSWPSW DSW
C
D
B
E
O
A
F
9
0
8
1
7
2
6
3
5
4
N
CN1: POWER
Manufacturer : JST
CONNECTOR : S02B-PASK-2
CN2 : I/O
Manufacturer : JST
CONNECTOR : SM20B-SHLDS-GW-TF
32165
4
+2
88
0
EARTH TERMINAL
M2.5X0.45X4L
PLATE
NAME
7±0.25
1.5±0.25
20.6±0.5
+1
15
0
(EFFECTIVE
LENGTH)
R4MIN.
A
0.1
0
6.35−0.013
φ
A
38.1± 0.025
φ
0.025
0.075
A
60±0.5
47.1±0.13
47.1±0.13
60±0.5
步进电机用
外形图
5.8±0.15
4−φ4.5
+0.5
0
I
C
6
规格
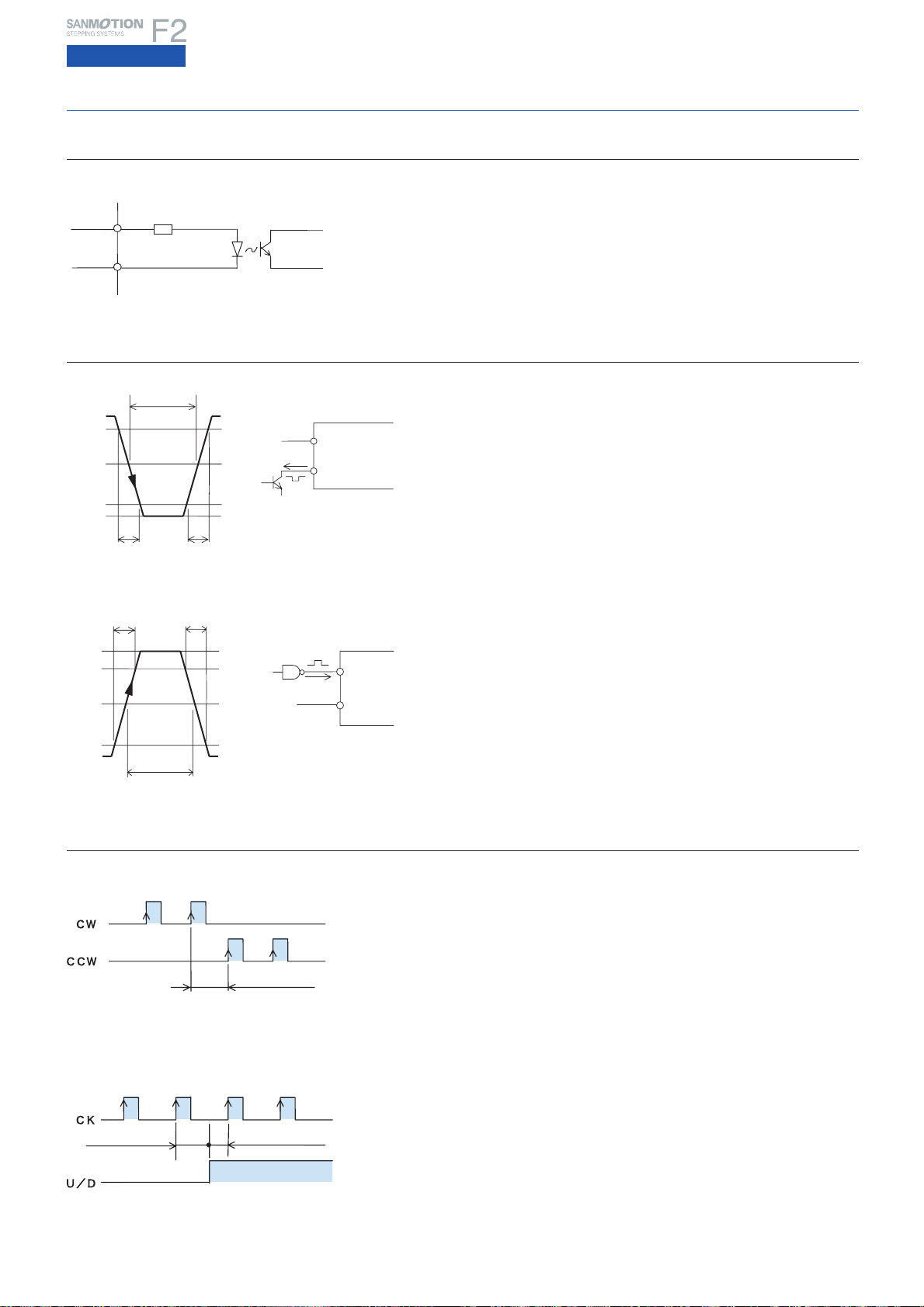
输入电路结构 (CW, CCW)
■
输入接口
◎ 输入电路结构 (CW, CCW)
ˮ
LJ
႑ࡽ
−
■
输入信号规格
◎ 负逻辑
4.0ċ5.5V
ۉୟۯፕ
0ċ0.5V
220
ᅜฉ
s
2
90%
50%
10%
LJ
5V
řஞ؋Բ50ǁᅜူ
LJ
ሀ
15mA
−
1s
ᅜူ
1s
ᅜူ
◎ 正逻辑
ᅜူ
1s
4.0ċ5.5V
ۉୟۯፕ
0ċ0.5V
■
指令脉冲的时序
2
ᅜူ
1s
90%
50%
10%
ᅜฉ
s
◎ 2输入方式 (CW脉冲,CCW脉冲)
50s
ሀ
15mA
řஞ؋Բ50ǁᅜူ
ᅜฉ
LJ
−
·■内部光耦为“ON”,在光耦“ON”的上升边缘,内部电
路 (电机) 动作。
· 对CW施加脉冲时,CCW侧内部光耦请为“OFF”。
· 对CCW施加脉冲时,CCW侧内部光耦请为“OFF”。
◎ 1输入方式 (CK,U/D)
ᅜฉ
50s
7
100s
ᅜฉ
·■内部光耦为“ON”,在CW侧光耦“ON”的上升边缘,内
部电路 (电机) 动作。
· CK侧内部光耦为“OFF”时进行U/D 的输入信号切换。
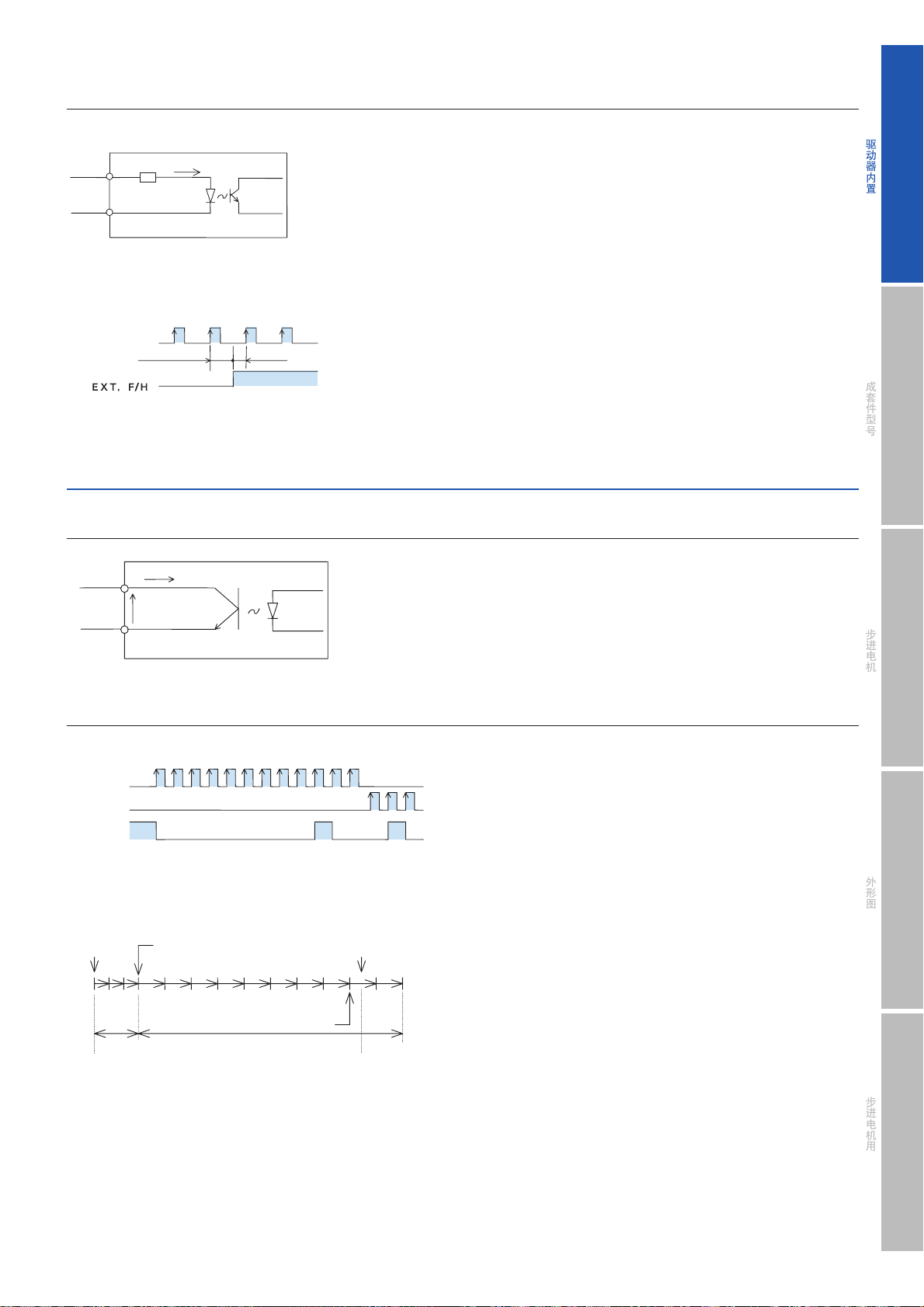
■
输入接口
◎ 输入电路结构 (PD,EXT,F/H,EMG)
ሀ
470
10mA
ˮ
LJ
႑ࡽ
−
◎ 指令脉冲和步距角选择以及
FULL/HALF选择输入的信号时序
ኸସஞ؋
100s
ᅜฉ
10s
ᅜฉ
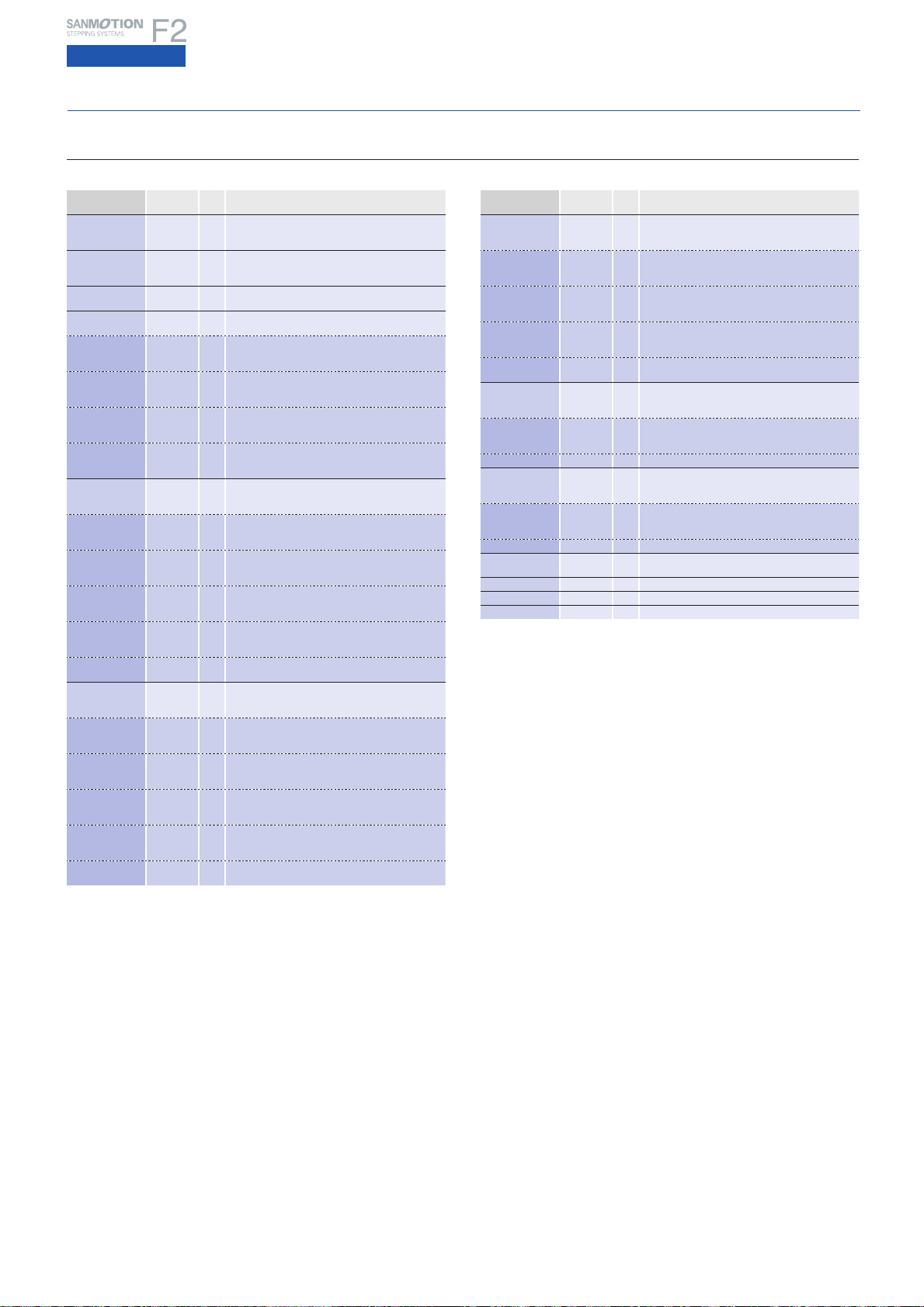
输出接口
■
输出电路结构 (BUSY,MON,AL)
MAX.
Ic
႑ࡽ
MAX. 30V
ൻۯഗ
ጀ
) MAX. Icۉୁ: 20mA
·■内部光耦为“ON”。
· EXT 输入信号
EXT 光耦为“ON”,外部F/H 输入信号的功能有效
EXT 光耦为“OFF”,本体旋转开关S.S的细分分割数
设定有效
· F/H 输入信号
F/H 光耦为“ON”,半步 (2分割) 动作
F/H 光耦为“OFF”,全步 (1分割) 动作
· EXE及F/H的输入信号切换请参照“指令脉冲和步距角选
择以及FULL/HALF选择输入的信号时序”。
· 通过EXT及F/H的输入信号切换步距角时,相原点显示器
LED显示及相原点显示输出停止时,有时无法输出。
请参照“输出接口”的MON输出。
驱动器内置
成套件型号
步进电机
■
MON输出
ஞ؋
CW
ஞ؋
CCW
MON
◎ 通过F/H输入信号更改分割设定时
ӷօ
ཚࡗྔև
ൎ࣑ྺඇօ
၎ᇱۅ࿋ዃ ၎ᇱۅ࿋ዃ
°
ۉዡ
0
F/H
႑ࡽLj
ඇօڦཕኹ࿋ዃඇօ
7.2
· 电机的励磁相在相原点 (接通电源时的状态) 时,光耦为
“ON”,与此同步,状态显示的LED上位D.P也亮灯。
· MON输出从相原点,按电机的输出轴每3.6o进行输出。
外形图
·如左图所示,通过外部输入信号及本体旋转开关更改电机
的分割设定时,电机无法停止,在可输出MON输出信号的
位置。使用MON输出信号时请注意。
°
步进电机用
I
C
8
规格
配线
■
输入输出信号的概略规格 ( 并行 I/F 模式 )
B1 6
ORG 6
B2 7
B4 8
针
概略功能
No.
发出程序运行的开始 / 停止指 令。
内部光耦 ON…程序运行开始
内部光耦 OFF…程序运 行停止
START信号ON时,发出程序运行的暂停指令。
内部光耦 ON…程序运行的暂 停
内部光耦 OFF…解除程序运行 的暂停
6 ~ 9 针的输入信号用共通地
输入 DC5V。
清除可恢复的报警。
内部光耦 OFF → ON…报警清除
程序运行中可使用的通用输入信号。
内部光耦 ON…通用输入 1 ON
内部光耦 OFF…通用输入 1 OFF
与其他位配合 , 选择程序编号。 ( 最下位 )
内部光耦 ON…相应位 1
内部光耦 OFF…相应位 0
输入紧急停止信号。
内部光耦 ON…无紧急停止
内部光耦 OFF…紧急停止
输入用于原点复位动作的原点信号。
内部光耦 ON…原点信 号 ON
内部光耦 OFF…原点信号 OFF
输入正向超程信号。
内部光耦 ON…未达 到正向超程
内部光耦 OFF…达到正向超程
程序运行中可使用的通用输入信号。
内部光耦 ON…通用输入 2 ON
内部光耦 OFF…通用输入 2 OFF
与其他位配合 , 选择程序编号。 ( 自最下位起的第 2 位 )
内部光耦 ON…相应位 1
内部光耦 OFF…相应位 0
输入紧急停止信号。
内部光耦 ON…无紧急停止
内部光耦 OFF…紧急停止
输入用于原点复位动作的原点信号。
内部光耦 ON…原点信 号 ON
内部光耦 OFF…原点信号 OFF
清除可恢复的报警。
内部光耦 OFF → ON…报警清除
输入负向超程信号。
内部光耦 ON…未达 到负向超程
内部光耦 OFF…达到负向超程
程序运行中可使用的通用输入信号。
内部光耦 ON…通用输入 3 ON
内部光耦 OFF…通用输入 3 OFF
与其他位配合 , 选择程序编号。 ( 自最下位起的第 3 位 )
内部光耦 ON…相应位 1
内部光耦 OFF…相应位 0
输入紧急停止信号。
内部光耦 ON…无紧急停止
内部光耦 OFF…紧急停止
输入用于原点复位动作的原点信号。
内部光耦 ON…原点信 号 ON
内部光耦 OFF…原点信号 OFF
清除可恢复的报警。
内部光耦 OFF → ON…报警清除
信号名称 简称
程序运行的
开始 / 停止
程序暂停
通用输入共通地 + COM 5
报警清除信号
( 标准 )
通用输入1IN16
程序编号
选择位 1
紧急停止信号 EMG 6
原点信号
正向超程信号 + OT 7
通用输入 2IN27
程序编号
选择位 2
紧急停止信号 EMG 7
原点信号 ORG 7
报警清除信号 ALMC 7
负向超程信号 - OT 8
通用输入 3IN38
程序编号
选择位 4
紧急停止信号 EMG 8
原点信号 ORG 8
报警清除信号 ALMC 8
START+
START-12
PAUS E +
PAUS E -34
ALMC 6
B8 9
针
概略功能
No.
输入紧急停止信号。
内部光耦 ON…无紧急停止
内部光耦 OFF…紧急停止
程序运行中可使用的通用输入信号。
内部光耦 ON…通用输入 4 ON
内部光耦 OFF…通用输入 4 OFF
与其他位配合 , 选择程序编号。 (自最下位 起的 第 4 位)
内部光耦 ON…相应位 1
内部光耦 OFF…相应位 0
输入用于原点复位动作的原点信号。
内部光耦 ON…原点信 号 ON
内部光耦 OFF…原点信号 OFF
清除可恢复的报警。
内部光耦 OFF → ON…报警清除
输出电机的动作状态。
内部光耦 ON…电机 动作中
内部光耦 OFF…电机停止中
输出程序的运行状态。
内部光耦 ON…程序运行中
内部光耦 OFF…程序运 行完毕
输出程序的运行状态。
内部光耦 ON…程序运行中
内部光耦 OFF…程序运 行完毕
输出电机的动作状态。
内部光耦 ON…电机 动作中
内部光耦 OFF…电机停止中
驱动器内部的各种报警电路动作时,向外部输出信
号。此时,步进电机处于无励磁状态。
信号名称 简称
紧急停止信号 EMG 9
通用输入 4IN49
程序编号
选择位 8
原点信号 ORG 9
报警清除信号 ALMC 9
电机动作中 BUSY 10
程序运行中 PEND 10
区域信号 ZONE 10 当前位置在预设的坐标内时,设为 ON。
程序运行中 PEND 11
电机动作中 BUSY 11
区域信号 ZONE 11 当前位置在预设的坐标内时,设为 ON。
报警输出 ALM 12
输出信号共通地 OUT_COM 13 输出信号用共通地。
DATA+ DATA + 14 串行信号。
DATA- DATA - 15 串行信号。
9
■
输入输出信号的概略规格 ( 串行 I/F 模式 )
针
信号名称 简称
通用输入共通地 + COM 5
报警清除信号
( 标准 )
ALMC 6
通用输入1IN16
紧急停止信号 EMG 6
原点信号 ORG 6
正向超程信号 + OT 7
通用输入 2IN27
紧急停止信号 EMG 7
原点信号 ORG 7
报警清除信号 ALMC 7
负向超程信号
- OT 8
通用输入 3IN38
紧急停止信号 EMG 8
原点信号 ORG 8
报警清除信号 ALMC 8
概略功能
No.
6 ~ 9 针的输入信号用共通地
输入 DC5V。
清除可恢复的报警。
内部光耦 OFF → ON…报警清除
程序运行中可使用的通用输入信号。
内部光耦 ON…通用输入 1 ON
内部光耦 OFF…通用输入 1 OFF
输入紧急停止信号。
内部光耦 ON…无紧急停止
内部光耦 OFF…紧急停止
输入用于原点复位动作的原点信号。
内部光耦 ON…原点信 号 ON
内部光耦 OFF…原点信号 OFF
输入正向超程信号。
内部光耦 ON…未达 到正向超程
内部光耦 OFF…达到正向超程
程序运行中可使用的通用输入信号。
内部光耦 ON…通用输入 2 ON
内部光耦 OFF…通用输入 2 OFF
输入紧急停止信号。
内部光耦 ON…无紧急停止
内部光耦 OFF…紧急停止
输入用于原点复位动作的原点信号。
内部光耦 ON…原点信 号 ON
内部光耦 OFF…原点信号 OFF
清除可恢复的报警。
内部光耦 OFF → ON…报警清除
输入负向超程信号。
内部光耦 ON…未达 到负向超程
内部光耦 OFF…达到负向超程
程序运行中可使用的通用输入信号。
内部光耦 ON…通用输入 3 ON
内部光耦 OFF…通用输入 3 OFF
输入紧急停止信号。
内部光耦 ON…无紧急停止
内部光耦 OFF…紧急停止
输入用于原点复位动作的原点信号。
内部光耦 ON…原点信 号 ON
内部光耦 OFF…原点信号 OFF
清除可恢复的报警。
内部光耦 OFF → ON…报警清除
针
信号名称 简称
紧急停止信号 EMG 9
通用输入 4IN49
原点信号 ORG 9
报警清除信号 ALMC 9
电机动作中 BUSY 10
程序运行中 PEND 10
概略功能
No.
输入紧急停止信号。
内部光耦 ON…无紧急停止
内部光耦 OFF…紧急停止
程序运行中可使用的通用输入信号。
内部光耦 ON…通用输入 4 ON
内部光耦 OFF…通用输入 4 OFF
输入用于原点复位动作的原点信号。
内部光耦 ON…原点信 号 ON
内部光耦 OFF…原点信号 OFF
清除可恢复的报警。
内部光耦 OFF → ON…报警清除
输出电机的动作状态。
内部光耦 ON…电机 动作中
内部光耦 OFF…电机停止中
输出程序的运行状态。
内部光耦 ON…程序运行中
内部光耦 OFF…程序运 行完毕
区域信号 ZONE 10 当前位置在预设的坐标内时,设为 ON。
程序运行中 PEND 11
电机动作中 BUSY 11
输出程序的运行状态。
内部光耦 ON…程序运行中
内部光耦 OFF…程序运 行完毕
输出电机的动作状态。
内部光耦 ON…电机 动作中
内部光耦 OFF…电机停止中
区域信号 ZONE 11 当前位置在预设的坐标内时,设为 ON。
报警输出 ALM 12
驱动器内部的各种报警电路动作时,向外部输出信号。
此时,步进电机处于无励磁状态。
输出信号共通地 OUT_COM 13 输出信号用共通地。
DATA+ DATA + 14 串行信号。
- DATA - 15 串行信号。
DATA
驱动器内置
成套件型号
步进电机
■
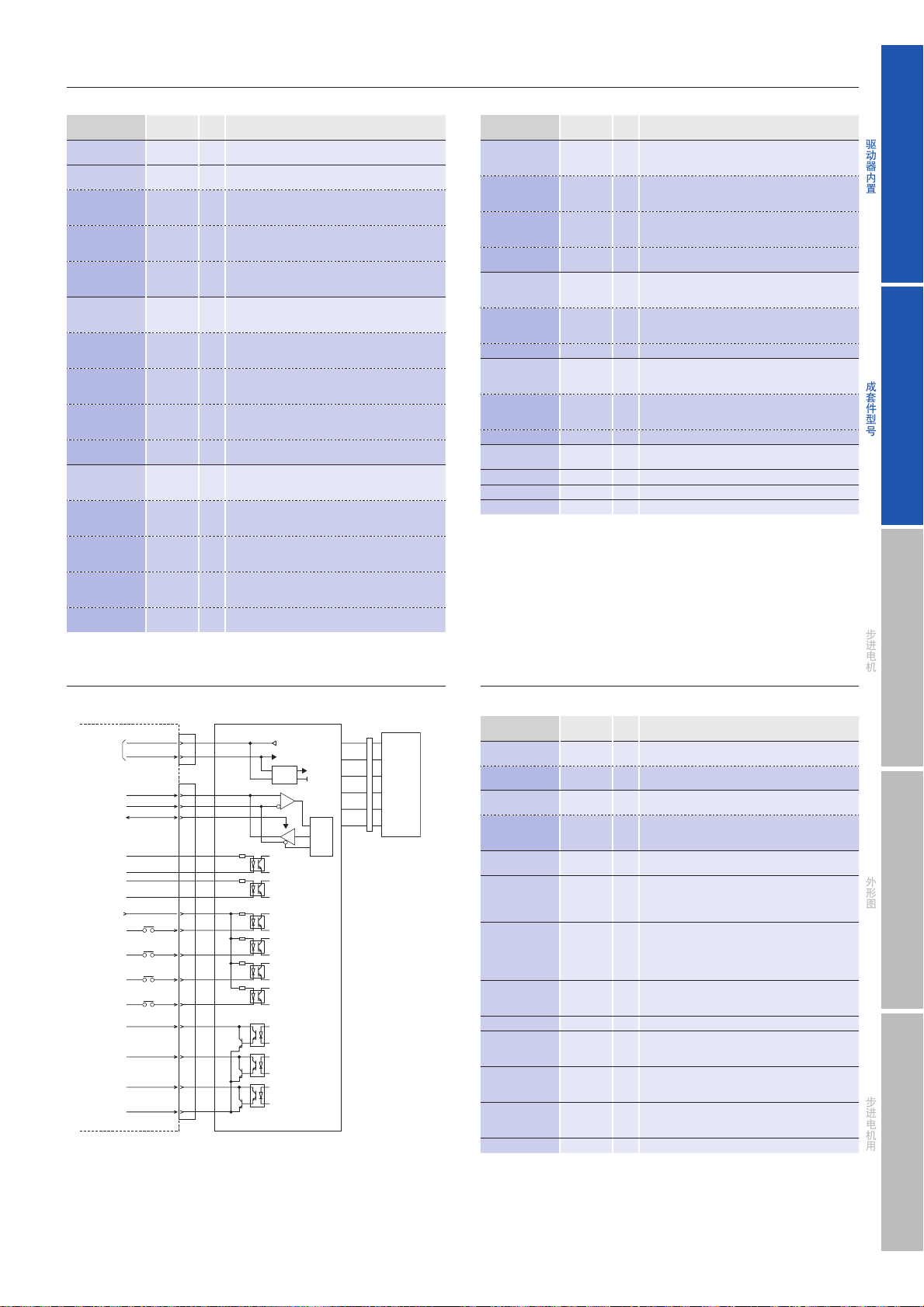
外部连接图
Controller
DC,24V
24G
,
DATA
.
DATA
GND (.5G)
,
CW,0START
.
CW.0START
,
COM
PD0IN10B1
EXT0IN20B2
FH0IN30B4
IN40B8
BUSY0OUT1
MON0OUT2
ALM
OUT_COM
,
.
CCW,0PAUSE
CCW.0PAUSE
CN1
CN2
■
输入输出信号的概略规格 ( 脉冲串 I/F 模式 )
Driver
1
2
14
15
20
1
2
3
4
5
6
7
8
9
30V 20mA MAX.
10
11
12
13
,24V
ۉᇸև
24G
!!!!
5G
,
5V
RXD
TXD
DE
2၎օۉ
信号名称 简称
CW 脉冲输入
( 标准 )
脉冲串输入
CCW 脉冲输入
( 标准 )
旋转方向输入
CW +
CW -12
CK+
CK-12
CCW+
CCW -34
U/ D +
U/ D -34
通用输入共通地 + COM 5
衰减输入 PD 6
步距角选择输入 EXT 7
FULL/HALF
选择输入
F/ H 8
——— ——— 9 预约
电机动作中
BUSY 10
相原点显示输出 MON 11
报警输出 ALM 12
输出信号共通地 OUT_COM 13 输出信号用共通地。
※ 电机的旋转方向为 CW 方向是指从输出轴侧观察电机时为顺时针方向旋转。
CCW 方向是指从输出轴侧观察电机时为逆时针方向旋转。
针
概略功能
No.
2 输入方式时
输入 CW 方向旋转的驱动脉冲。
1 输入方式时
输入电机旋转用的驱动脉冲串。
2 输入方式时
输入 CCW 方向旋转的驱动脉冲。
1 输入方式时输入电机的选择方向信号
内部光耦 ON…CW 方向
内部光耦 OFF…CCW 方向
6 ~ 9 针的输入信号用共通地
输入 DC5V。
通过输入 PD 信号,来阻断流入电机的电流 ( 衰减 )。
( 选择拨码开关,可切换为低功率功能)
PD 输入信号 ON ( 内部光耦 ON) …PD 功能有效
输入信号 OFF ( 内部光耦 OFF) …PD 功能无效
PD
输入 EXT 信号,使 FULL/HALF 选择输入生效。
EXT 输入信号 ON ( 内部光耦 ON)
…外部输入信号 F/H 有效
EXT 输入信号 OFF ( 内部光耦 OFF)
…本体旋 转开关 S.S 有效
EXT 输入信号 ON ( 内部光耦 ON) 时
F/H 输入信号 ON ( 内部光耦 ON) …半步
F/H 输入信号 OFF ( 内部光耦 OFF) …全步
输出电机的动作状态。
内部光耦 ON…电机动作中
内部光耦 OFF…电机停止中
励磁相为原点 ( 接通电源时的状态 ) 时,为 ON。
全步时,每 4 个脉冲 1 次设为 ON,
半步时,每 8 个脉冲 1 次设为 ON。
驱动器内部的各种报警电路动作时,向外部输出信
号。
此时,步进电机处于无励磁状态。
外形图
步进电机用
I
C
10

规格
设定
■
功能选择拨码开关
可利用拨码开关,选择符合规格的功能。
交货时的设定如下所示,请确认。
OFF ON
1
F/R
2
LV
3
PD
4
预约
OFF 2 输入方式 (CW,CCW 脉冲 )
OFF 细分动作
OFF 电源 OFF
OFF 预约
I. SEL
5
6
S. SEL
◎ 脉冲串 I/F 模式时
1
输入方式选择 (F/R)
选择输入脉冲方式。
这一开关设定仅在脉冲串I/F模式时有效。
F/R 输入脉冲方式
ON 1 输入方式 (CK,U/ D)
OFF 2 输入方式 (CW,CCW)
低振动模式选择 (LV)
2
即使设定为较粗的分辨率 (1分割、2分割等),也能够确保低振
动且平稳运转。
这一开关设定仅在脉冲串I/F模式时有效。
并行I/F模式、串行I/F模式时,一直以低振动方式动作。
LV 动作
ON 低振动动作
OFF 细分动作
※LV选择设为ON (低振动模式) 时,在驱动器内部进行驱动脉冲的运算处理。因此,
电机动作相对输入脉冲延迟约3.2ms。请注意根据组装电机、负荷、驱动曲线等,
电机停止时至轴静止为止需一定时间。
(并行I/F模式、串行I/F模式下无延迟。)
OFF
OFF
脉冲串 I/F 模式
◎ 并行 I/F 模式或串行 I/F 模式时
设定串行通信的通信速度。
开关 设定值
F/R
LV
PD
※接通电源后的设定变更为无效。
不发挥F/R,LV,PD功能。
※脉冲串I/F模式的通信速度固定为9600bps。
OFF ○○○○
ON
OFF ○○
ON ○○
OFF ○○
ON ○○
9,600 19,200 38,400 115,200
通信速度 bps 设定值
3
衰减选择 (PD)
选择输入衰减信号时的电机线圈电流值。
这一开关设定仅在脉冲串I/F模式时有效。
PD 电机线圈电流
ON 旋转开关的电流值 ( 低功率 )
OFF 0A ( 电源 OFF)
※输入输出信号连接器 (CN2) 的PD输入信号ON (内部光耦ON),PD功能 (功能选择
拨码开关的PD所选定的设定) 有效。衰减信号输入优先于报警以外的所有电流设
定。有时因输出转矩下降引起的丢步或电机电流OFF (电机无励磁) 引起的工件掉
落等,而无法保持运转状态。
请在注意衰减信号的输入时序的同时,在机械侧设置安全装置等。
4
开关4 -预约
※开关4请一直设为OFF。
5 6
, 动作模式选择 (I.SEL,S.SEL)
选择动作模式。
I.SEL S.SEL 动作模式
OFF - 脉冲串 I/F 模式
ON
※请在断开驱动器电源后更换动作模式选择开关。
OFF 并行 I/F 模式
ON 串行 I/F 模式
11
■
旋转开关 (RSW) 及模式切换开关 (PSW)
◎ 脉冲串 I/F 模式时
通过旋转开关 (RSW) 和模式切换开关 (PSW) 的组合,来设定步距角选择、运转电流选
择、停止时电流选择。
1. 步距角选择 (S.S)
用这一旋转开关设定细分驱动时的基本步距角 (0.9o/步进) 的分割数。
刻度 01234567
分割数 1 2 2.5 4 5 8 10 20
刻度 89ABCDEF
分割数 25 40 50 80 100 125 200 250
交货时的设定为分割数2。
※输入信号连接器 (CN2) 的EXT输入信号ON (内部光耦ON),用旋转开关 (RSW) 进行分割数设定无效。
2. 运转电流选择 (RUN)
可利用这一旋转开关选择电机的运转电流值。
刻度 01234567
电机电流
(%)
刻度 89ABCDEF
电机电流
(%)
100
( 额定 )
60 55 50 45 40 35 30 25
95 90 85 80 75 70 65
交货时的设定为100% (额定)。
※如果电机转矩充裕,通过降低运转电流值,可以减少振动。
电机的输出转矩与电流大致成正比。
调整运转电流时,请充分确认动作范围后,决定电机电流值。
驱动器内置
成套件型号
3. 停止时电流选择 (STP)
利用这一旋转开关可选择停止时及衰减输入信号ON (用拨码开关选择低功率功能) 时的电
机电流值。
刻度 01234567
电机电流
(%)
刻度 89ABCDEF
电机电流
(%)
100
( 额定 )
60 55 50 45 40 35 30 25
95 90 85 80 75 70 65
交货时的设定为额定的50%。
※STP的停止时电流设定在电机停止时 (输入最终脉冲后约200ms)、衰减输入信号ON (选择低功率功能)时有效。
电机的输出转矩与电机的电流值大致成正比。
请注意电机停止时的输出转矩 (特别是Z轴负荷的工件等的掉落)。
※如果电机的输出转矩充裕,可以通过运转电流选择、停止时电流选择来下调设定,从而抑制电机驱动器的温度上升。
◎ 并行 I/F 模式或串行 I/F 模式时
利用旋转开关来设定串行通信时的从设备地址。
RSW 从设备地址 (HEX)
0 地址 0
1 地址 1
::
E 地址 E
F 地址 F
交货时的设定为地址 0。
※脉冲串 I/F 模式的从设备地址固定为 0。
步进电机
外形图
I
C
12
步进电机用
DC 输入
单极
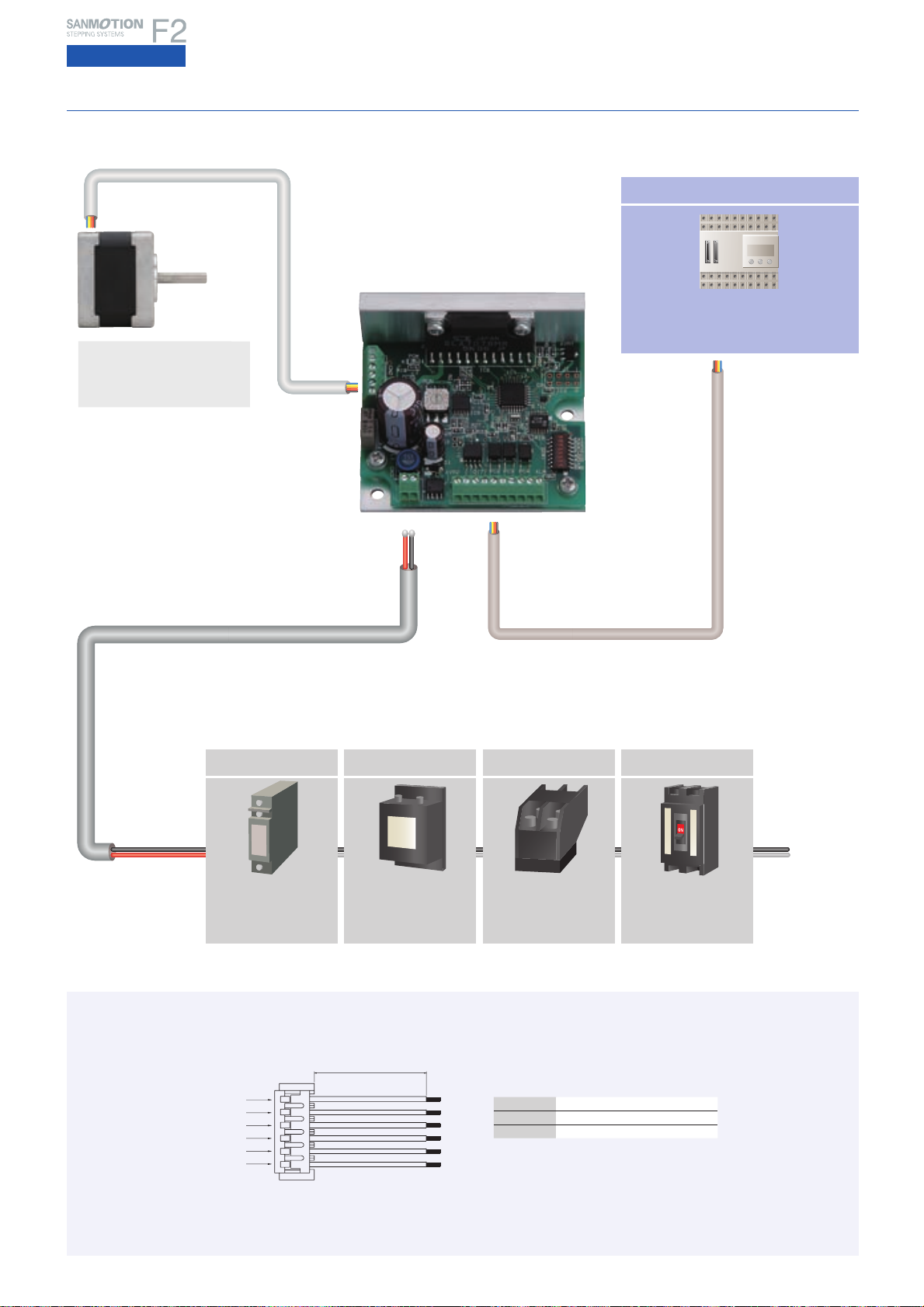
系统配置图
标准型号 : H 系列电机
SH 系列电机
□
28 / □42 / □56
A
电机用
●
电缆
电机用
连接器
DC 电源用
连接器
上位装置
PLC
本公司的上位控制器当然可以使用,
也可与其他公司产品连接。
输入输出信号用
连接器
DC 电源用电缆
DC
24V/36V
■连接电缆
A
● 电机用电缆
□
42mm
开关电源
将交流电源 (AC) 转
换为直流电源 (DC)。
܋ጱNo. !!ᆅ၍ჿ
ӣ
1
2
ઢ
3
ࣜ
4
ࢤ
5
6
JST
2
3456
干扰滤波器
防止来自于电源线的
外来干扰。
500ᅜฉ
输入输出信号用
电缆
电磁接触器
驱动器电源的ON/
OFF。
请安装波涌抑制器使
配线用断路器
保护电源线路的装置。
如有过电流流通,将
会断开电路。
用。
引线 UL1430 AWG26
外罩 EHR-6 黑色 ( 日本压接端子制造 )
端子 SEH-001T-P0.6 ( 日本压接端子制造 )
(t)
(r)
单相
AC100V
~
AC230V
13
DC 输入
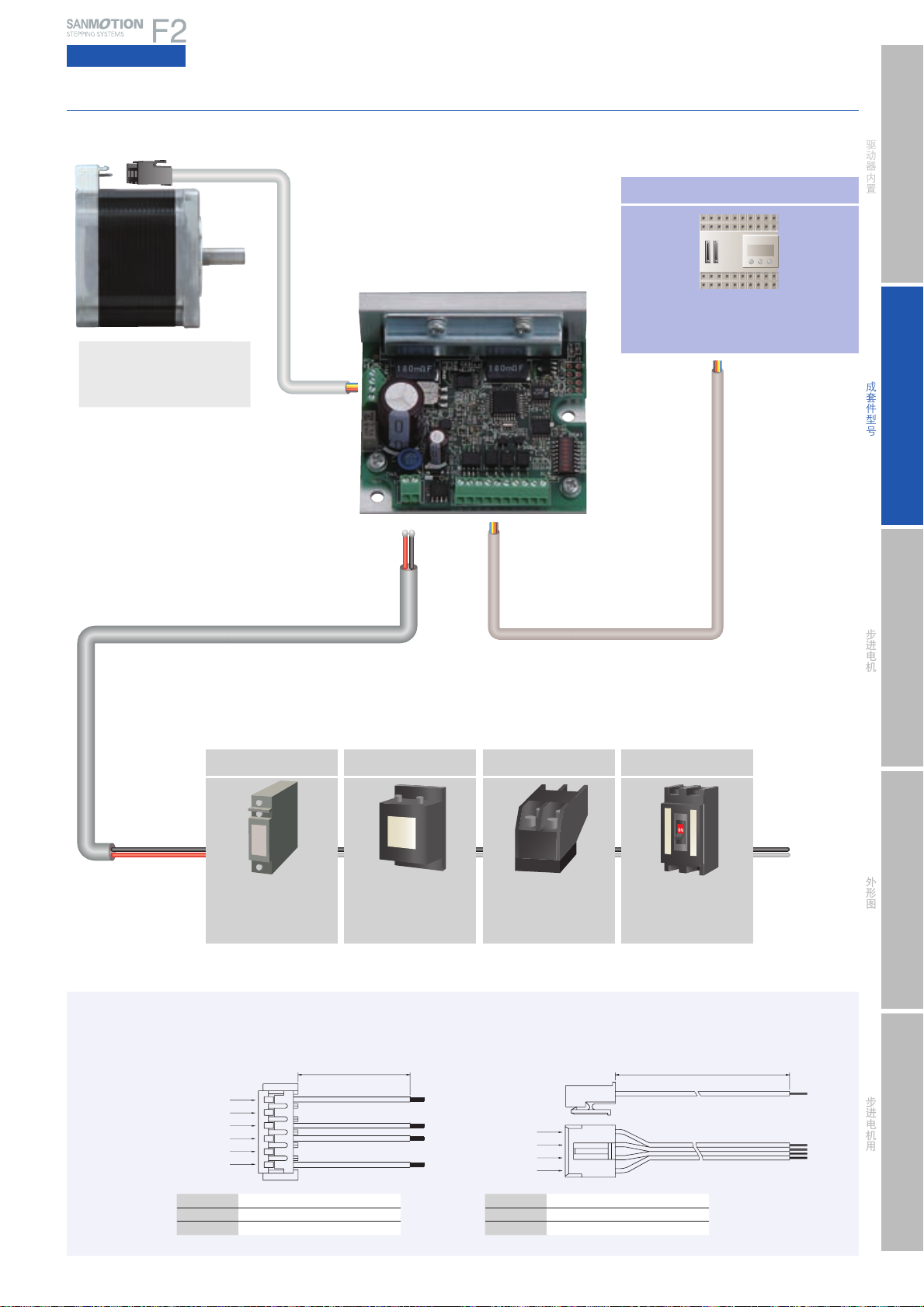
双极
系统配置图
驱动器内置
标准型号 : H 系列电机
SH 系列电机
□
28 / □42 / □50/ □56/ □60
A
电机用
●
电缆
电机用
连接器
DC 电源用
连接器
上位装置
PLC
本公司的上位控制器当然可以使用,
也可与其他公司产品连接。
成套件型号
输入输出信号用
连接器
步进电机
DC 电源用电缆
DC
24V/36V
■连接电缆
A
● 电机用电缆
□
42mm
开关电源
将交流电源 (AC) 转
换为直流电源 (DC)。
܋ጱNo. ᆅ၍ჿ
ઢ
1
.
2
3
ࣜ
4
.
5
ࢤ
6
JST
2
3456
干扰滤波器
防止来自于电源线的
外来干扰。
500ᅜฉ
输入输出信号用
电缆
电磁接触器
驱动器电源的ON/
OFF。
请安装波涌抑制器使
用。
□
60mm
܋ጱNo. ᆅ၍ჿ
4
ࣜ
3
ࢤ
2
ઢ
1
配线用断路器
保护电源线路的装置。
如有过电流流通,将
会断开电路。
500ᅜฉ
(t)
(r)
单相
AC100V
~
AC230V
外形图
步进电机用
I
C
引线 UL1430 AWG26
外罩 EHR-6 黑色 ( 日本压接端子制造 )
端子 SEH-001T-P0.6 ( 日本压接端子制造 )
引线 UL1430 AWG22
外罩 VHR-4N ( 日本压接端子制造 )
端子 SVH-21T-P1.1 ( 日本压接端子制造 )
14
DC 输入
成套件型号的辨别
F系列单极驱动器 (型号: US1D200P10) 和电机法兰边长尺寸56mm/电机长度41.8 mm单轴、H系列电机 (型号: 103H7121-0440) 的系
统成套件型号。
D H 7161 1 SU
步进电机轴规格
S : 单轴 D : 双轴
步进电机总长 ( 用电机类型的下 1 位表示 ) 但 28 边长、42 边长 1.8°例外 )
电机法兰尺寸
□
记号
28mm
型号 电机长度 型号 电机长度 型号 电机长度 型号 电机长度 型号 电机长度 型号 电机长度 型号 电机长度
1
3205 31mm 5205 33mm 1421 33mm 6701 39.8mm 7121 41.8mm 7821 44.8mm 1601 42mm
2
3
4
6
3215 50.3mm 7126 75. 8mm
□
42mm
5208 39mm 1422 39mm 7822 53.8mm 1602 54mm
5210 48mm 1424 48mm
步进电机法兰尺寸 ( 用电机类型的上 2 位表示 )
32 : □28mm 1.8°
□
52 :
71 :
78 :
14 :
16 :
42mm 1.8°
□
56mm 1.8°
□
60mm 1.8°
□
42mm 0.9°
□
60mm 0.9°
步进电机系列名称
H : H 系列
S : SH 系列
□
50mm
6703 51.3mm 7123 53.8mm 7823 85.8mm 1603 76mm
( 例 ) 步进电机型号:
103H5205-0440
▲
表示电机类型 (4 位 )
□
56mm
□
60mm
15
额定电流规格
4 : 1A/ 相 5 : 1.2A/ 相 6 : 2A/ 相
型号
连线规格
U : 2 相单极连线 B : 2 相双极连线
电源规格
D : DC
2 相单极 驱动器组合一览表
组合
标准型号
电机
法兰尺寸
□
28mm
□
42mm
□
56mm
基本
步距角
1.8°
1.8°
1.8°
1.8°
1.8°
0.9°
0.9°
0.9°
1.8°
1.8°
1.8°
成套件型号 附属电机型号
单轴 双轴 单轴 双轴
DU14H321S DU14H321D
DU14H326S DU14H326D
DU15H521S DU15H521D
DU15H522S DU15H522D
DU15H524S DU15H524D
DU15S141S DU15S141D
DU15S142S DU15S142D
DU15S144S DU15S144D
DU16H711S DU16H711D
DU16H713S DU16H713D
DU16H716S DU16H716D
2 相双极 驱动器组合一览表
组合
标准型号
电机
法兰尺寸
□
28mm
□
42mm
□
50mm
□
56mm
□
60mm
基本
步距角
1.8°
1.8°
1.8°
1.8°
1.8°
0.9°
0.9°
0.9°
1.8°
1.8°
1.8°
1.8°
1.8°
1.8°
1.8°
1.8°
0.9°
0.9°
成套件型号 附属电机型号 额定电流
单轴 双轴 单轴 双轴
DB14H321S DB14H321D
DB14H326S DB14H326D
DB14H521S DB14H521D
DB14H522S DB14H522D
DB14H524S DB14H524D
DB16S141S DB16S141D
DB16S142S DB16S142D
DB16S144S DB16S144D
DB16H671S DB16H671D
DB16H672S DB16H672D
DB16H711S DB16H711D
DB16H713S DB16H713D
DB16H716S DB16H716D
DB16H781S DB16H781D
DB16H782S DB16H782D
DB16H783S DB16H783D
DB16S161S DB16 S161D
DB16S16 2S DB16 S162D
额定电流
103H 3205-5270 103H320 5-523 0 1A
103H 3215-5 270 103H 3215-5230 1A
103H 5205- 0440 103H5 205- 0410 1.2 A
103H 5208- 0440 103H5 208-0410 1.2 A
103H 5210-0 440 103H5 210-0410 1.2 A
SH1421-0441 SH1421-0411 1.2A
SH1422-0441 SH1422-0411 1.2A
SH1424-0441 SH1424-0411 1.2A
103H7121-0440 10 3H7121-0 410 2A
103H7123-0440 103H7123-0410 2 A
103H7126-0 440 103H7126-0410 2 A
103H3205-5770 103H3205-5730 1A
103H3215-5770 103H3215-5730 1A
103H5205-5240 103H5205-5210 1A
103H5208-5240 103H5208-5210 1A
103H5210-5240 103H5210-5210 1A
SH1421-5241 SH1421-5211 2A
SH1422-5241 SH1422-5211 2A
SH1424-5241 SH1424-5211 2A
103H 6701-50 40 103H 6701-5010 2A
103H6703-5040 103H6703-5010 2A
103H7121-5740 10 3H7121-5710 2A
103H7123-5740 10 3H7123- 5710 2 A
103H7126-5740 10 3H7126- 5710 2 A
103H7821- 5740 103H7821-5710 2A
103H782 2-5740 103H7822-5710 2A
103H7823-5740 103H7823 -5710 2 A
SH1601-5240 SH1601-5210 2A
SH1602-5240 SH1602-5210 2A
驱动器内置
成套件型号
步进电机
I
C
16
外形图
步进电机用
DC 输入
规格
标准型号
F系列 标准型号DC驱动器规格
单极
ۉ݆ન٫
28 42
56
o
电机法兰尺寸
尺寸
电机长度
单轴
成套件型
号
双轴
保持转矩 N · m 0.032 0.062
转子惯量
×10
-4
kg · m
2
31mm 50.3mm
DU14H321S DU14H326S
DU14H321D DU14H326D
0.009 0.016
□
28mm (1.8
)
重量 kg 0.11 0.2
容许轴向负荷 N3 3
容许径向负荷
注1) 负荷点为输出 轴顶端起1/3 的位置。
注 1
N42 42
1 分割 fs
2 分割 fs
线圈电流 : 1A/ 相
脱出转矩
电源电流 ( 负荷时 )
电源电流 ( 无负荷时)
fs : 无负荷时的
最大自启动频率
1 分割
2 分割
DC24V
DC36V
0.5
0.4
0.3
0.2
ገ!!( kgf · cm )
0.1
0
1ݴߪ
2ݴߪ
0.5
0.4
0.3
0.2
ገ!!( kgf · cm )
0.1
0
1ݴߪ
2ݴߪ
0.04
0.03
0.02
ገ!!(N · m )
0.01
0.04
0.03
0.02
ገ!!(N · m )
0.01
0.05
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
ገ! (min )
0.05
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
ገ! (min )
10
fs
2000 3000 5000100 1000
-1
10
fs
2000 3000 5000100 1000
-1
1.0
9
8
0.8
7
6
5
4
3
2
1
0
9
8
7
6
5
4
3
2
1
0
0.6
0.4
ۉᇸۉୁ!(A)
ገ!!( kgf · cm )
0.2
0
1.0
0.8
0.6
0.4
ۉᇸۉୁ!(A)
ገ!!( kgf · cm )
0.2
0
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
o
电机法兰尺寸
尺寸
电机长度
单轴
成套件型
号
双轴
保持转矩 N · m 0.2 0.29 0.39
转子惯量
×10-4kg
2
·
m
33mm 39mm 48 mm
DU15S141S DU15S142S DU15S144S
DU15S141D DU15S142D DU15S144D
0.044 0.066 0.089
□
42mm (0.9
)
重量 kg 0.24 0.29 0.38
容许轴向负荷 N10 10 10
容许径向负荷
注1) 负荷点为输出 轴顶端起1/3 的位置。
注 1
N30 30 30
0.1
0.08
0.06
0.04
ገ!!(N · m )
0.02
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
1ݴߪ
2ݴߪ
ገ! (min )
0.1
0.08
0.06
0.04
ገ!!(N · m )
0.02
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
1ݴߪ
2ݴߪ
ገ! (min )
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
fs
fs
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
17
1 分割 fs
2 分割 fs
线圈电流 : 1.2A/ 相
脱出转矩
电源电流 ( 负荷时 )
电源电流 ( 无负荷时)
fs : 无负荷时的
最大自启动频率
1 分割
2 分割
DC24V
DC36V
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
0.5
0.4
0.3
0.2
0.1
0
fsfs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
0.5
0.4
0.3
0.2
0.1
0
fsfs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
10
9
8
7
6
5
4
3
2
1
0
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
3
2
1
0
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
5
0.5
4
0.4
3
0.3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
0.4
ገ!!(N · m )
0.2
0.1
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
0.5
0.3
0.2
0.1
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
ۉᇸۉୁ!(A)
ۉᇸۉୁ!(A)
10
9
8
7
6
5
4
3
2
1
0
fsfs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
3
2
1
0
fs
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
5
0.5
4
0.4
3
0.3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
0.2
0.1
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
0.5
0.4
0.3
0.2
0.1
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
ۉᇸۉୁ!(A)
ۉᇸۉୁ!(A)
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
fsfs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
fsfs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。

电机法兰尺寸
尺寸
电机长度
单轴
成套件型
号
双轴
保持转矩 N · m
转子惯量
重量
容许轴向负荷
容许径向负荷
注1) 负荷点为输出 轴顶端起1/3 的位置。
注 1
×10
kg 0.23 0.29 0.37
N10 10 10
N30 30 30
-4
kg · m
o
□
42mm (1.8
)
33mm 39mm 48mm
DU15H521S DU15H522S DU15H524S
DU15H521D DU15H522D DU15H524D
2
0.2 0.3 0.37
0.036 0.056 0.074
驱动器内置
1 分割 fs
2 分割 fs
线圈电流 : 1.2A/ 相
脱出转矩
电源电流 ( 负荷时 )
电源电流 ( 无负荷时)
fs : 无负 荷时的
最大自启动频率
1 分割
2 分割
DC24V
DC36V
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
0.5
0.4
0.3
0.2
0.1
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
ገ! (min )
0.5
0.4
0.3
0.2
0.1
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
ገ! (min )
10
9
8
7
6
5
4
3
2
1
0
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
3
2
1
0
2000 3000 5000100 1000
-1
5
0.5
4
0.4
3
0.3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
0.2
0.1
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
0.5
0.4
0.3
0.2
0.1
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
ۉᇸۉୁ!(A)
ۉᇸۉୁ!(A)
10
9
8
7
6
5
4
3
2
1
fs
fs
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
3
2
1
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
5
0.5
4
0.4
3
0.3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
0.2
0.1
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
0.5
0.4
0.3
0.2
0.1
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
ۉᇸۉୁ!(A)
ۉᇸۉୁ!(A)
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
fsfs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
o
电机法兰尺寸
尺寸
电机长度
单轴
成套件型
号
双轴
保持转矩 N · m 0.39 0.83 1.27
转子惯量
×10
-4
kg · m
2
41.8mm 53.8mm 75.8mm
DU16H711S DU16H713S DU16H716S
DU16H711D DU16H713D DU16H716D
0.1 0.21 0.36
□
56mm (1.8
)
重量 kg 0.47 0.65 0.98
容许轴向负荷 N15 15 15
容许径向负荷
注1) 负荷点为输出 轴顶端起1/3 的位置。
注 1
N71 71 71
成套件型号
步进电机
1 分割 fs
2 分割 fs
线圈电流 : 2A/ 相
脱出转矩
电源电流 ( 负荷时 )
电源电流 ( 无负荷时)
fs : 无负荷时的
最大自启动频率
1 分割
2 分割
DC24V
DC36V
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
0.5
0.4
0.3
0.2
0.1
0
fsfs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
ገ! (min )
0.5
0.4
0.3
0.2
0.1
0
fsfs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
ገ! (min )
外形图
10
2000 3000 5000100 1000
-1
10
2000 3000 5000100 1000
-1
10
8
6
4
ገ!!( kgf · cm )
2
0
1ݴߪ
2ݴߪ
10
8
6
4
ገ!!( kgf · cm )
2
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
1.0
0.8
0.6
0.4
0.2
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
1.0
0.8
0.6
0.4
0.2
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
10
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
-1
fsfs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
20
16
12
8
ገ!!( kgf · cm )
4
0
1ݴߪ
2ݴߪ
20
16
12
8
ገ!!( kgf · cm )
4
0
1ݴߪ
2ݴߪ
1.6
1.2
0.8
ገ!!(N · m )
0.4
ገ!!(N · m )
0.4
2.0
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
2.0
1.6
1.2
0.8
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
fs
0
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
fsfs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
步进电机用
I
C
18
DC 输入
规格
标准型号
F系列 标准型号DC驱动器规格
双极
ۉ݆ન٫
28 42
50
o
电机法兰尺寸
尺寸
电机长度
单轴
成套件型
号
双轴
保持转矩 N · m 0.048 0.1
转子惯量
×10-4kg
2
·
m
31mm 50.3mm
DB14H321S DB14H326S
DB14H321D DB14H326D
0.009 0.016
□
28mm (1.8
)
重量 kg 0.11 0.2
容许轴向负荷 N3 3
容许径向负荷
注1) 负荷点为输出轴顶端起1/3的位置。
56
60
注 1
N42 42
线圈电流
□
28mm (1.8°) : 1A/相
□
42mm (1.8°) : 1A/相
□
42mm (0.9°) : 2A/相
脱出转矩
电源电流 (负荷时)
电源电流 (无负荷时)
1分割 fs
fs : 无负荷时的
最大自启动频率
2分割 fs
1分割
2分割
DC24V
DC36V
1.0
0.8
0.6
0.4
ገ!!( kgf · cm )
0.2
0
1ݴߪ
2ݴߪ
1.0
0.8
0.6
0.4
ገ!!( kgf · cm )
0.2
0
1ݴߪ
2ݴߪ
0.08
0.06
0.04
ገ!!(N · m )
0.08
0.06
0.04
ገ!!(N · m )
0.1
0.02
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
ገ! (min )
0.1
0.02
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
ገ! (min )
10
2000 3000 5000100 1000
-1
10
2000 3000 5000100 1000
-1
2.0
1.6
1.2
0.8
ገ!!( kgf · cm )
0.4
0
1ݴߪ
2ݴߪ
2.0
1.6
1.2
0.8
ገ!!( kgf · cm )
0.4
0
1ݴߪ
2ݴߪ
0.16
0.12
0.08
ገ!!(N · m )
0.16
0.12
0.08
ገ!!(N · m )
0.2
0.04
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
0.2
0.04
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
fs
fs
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
o
电机法兰尺寸
尺寸
电机长度
单轴
成套件型
号
双轴
保持转矩 N · m 0.48 0.28 0.49 0.55
转子惯量
×10-4kg
·
m
□
42mm (0.9
48mm 39.8mm 51.3mm 41.8mm
DB16S144S DB16H671S DB16H673S DB16H711S
DB16S144D DB16H671D DB16H673D DB16H711D
2
0.089 0.057 0.118 0.1
)
□
50mm (1.8
o
)
□
56mm (1.8o)
重量 kg 0.38 0.35 0.5 0.47
容许轴向负荷 N10 15 15 15
容许径向负荷
注1) 负荷点为输出轴顶端起1/3的位置。
注 1
N30 99 99 71
19
1 分割 fs
2 分割 fs
线圈电流 : 2A/ 相
脱出转矩
电源电流 ( 负荷时 )
电源电流 ( 无负荷时)
fs : 无负荷时的
最大自启动频率
1 分割
2 分割
DC24V
DC36V
10
8
6
4
ገ!!( kgf · cm )
2
0
1ݴߪ
2ݴߪ
10
8
6
4
ገ!!( kgf · cm )
2
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
1.0
0.8
0.6
0.4
ገ!!(N · m )
0.2
1.0
0.8
0.6
0.4
0.2
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
-1
ገ! (min )
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
ገ! (min )
10
9
8
7
6
5
4
3
2
1
0
2000 3000 5000100 1000
10
9
8
7
6
5
4
3
2
1
0
5
0.5
4
0.4
3
0.3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
0.2
0.1
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
0.5
0.4
0.3
0.2
0.1
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
ۉᇸۉୁ!(A)
ۉᇸۉୁ!(A)
10
fs
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
fs
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
8
6
4
ገ!!( kgf · cm )
2
0
1ݴߪ
2ݴߪ
10
8
6
4
ገ!!( kgf · cm )
2
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
1.0
0.8
0.6
0.4
0.2
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
1.0
0.8
0.6
0.4
0.2
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
10
9
8
7
6
5
4
3
2
1
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
3
2
1
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
1.0
8
0.8
6
0.6
4
ገ!!( kgf · cm )
2
0
1ݴߪ
2ݴߪ
10
8
6
4
ገ!!( kgf · cm )
2
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
0.4
0.2
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
1.0
0.8
0.6
0.4
0.2
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
ۉᇸۉୁ!(A)
ۉᇸۉୁ!(A)
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。

o
□
42mm (1.8
)
33mm 39mm 48mm
DB14H521S DB14H522S DB14H524S
DB14H521D DB14H522D DB14H524D
0.265 0.39 0.51
0.036 0.056 0.074
0.23 0.29 0.37
10 10 10
30 30 30
o
□
42mm (0.9
)
33mm 39mm
DB16S141S DB16S142S
DB16S141D DB16S142D
0.23 0.34
0.044 0.066
0.24 0.29
10 10
30 30
驱动器内置
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
0.5
0.4
0.3
0.2
0.1
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
2000 3000 5000100 1000
ገ! (min )
0.5
0.4
0.3
0.2
0.1
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
2000 3000 5000100 1000
ገ! (min )
-1
-1
□
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
56mm (1.8
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
o
ገ!!(N · m )
ገ!!(N · m )
)
0.5
0.4
0.3
0.2
0.1
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
2000 3000 5000100 1000
ገ! (min )
0.5
0.4
0.3
0.2
0.1
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
2000 3000 5000100 1000
ገ! (min )
10
-1
10
-1
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
8
6
4
ገ!!( kgf · cm )
2
0
1ݴߪ
2ݴߪ
10
8
6
4
ገ!!( kgf · cm )
2
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
1.0
0.8
0.6
0.4
0.2
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
1.0
0.8
0.6
0.4
0.2
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
10
9
8
7
6
5
4
3
2
1
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
3
2
1
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
-1
5
0.5
4
0.4
3
0.3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
□
0.2
0.1
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
0.5
0.4
0.3
0.2
0.1
0
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
60mm (1.8
ۉᇸۉୁ!(A)
ۉᇸۉୁ!(A)
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
fs
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
o
)
53.8mm 75.8mm 44.8mm 53.8mm 85.8mm
DB16H713S DB16H716S DB16H781S DB16H782S DB16H783S
DB16H713D DB16H716D DB16H781D DB16H782D DB16H783D
1.0 1.6 0.88 1.37 2.7
0.21 0.36 0.275 0.4 0.84
0.65 0.98 0.6 0.77 1.34
15 15 15 15 15
71 71 95 95 95
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
5
4
3
2
ገ!!( kgf · cm )
1
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
0.5
0.4
0.3
0.2
0.1
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
0.5
0.4
0.3
0.2
0.1
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
成套件型号
2
1
0
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
步进电机
20
16
12
8
ገ!!( kgf · cm )
4
0
1ݴߪ
2ݴߪ
20
16
12
8
ገ!!( kgf · cm )
4
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
2.0
1.6
1.2
0.8
0.4
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
ገ! (min )
2.0
1.6
1.2
0.8
0.4
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
2000 3000 5000100 1000
ገ! (min )
外形图
10
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
3
2
1
0
2000 3000 5000100 1000
-1
20
16
12
8
ገ!!( kgf · cm )
4
0
1ݴߪ
2ݴߪ
20
16
12
8
ገ!!( kgf · cm )
4
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
2.0
1.6
1.2
0.8
0.4
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
2.0
1.6
1.2
0.8
0.4
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
ۉᇸۉୁ!(A)
10
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
20
16
12
8
ገ!!( kgf · cm )
4
0
1ݴߪ
2ݴߪ
20
16
12
8
ገ!!( kgf · cm )
4
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
2.0
1.6
1.2
0.8
0.4
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
2.0
1.6
1.2
0.8
0.4
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
10
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
20
16
12
8
ገ!!( kgf · cm )
4
0
1ݴߪ
2ݴߪ
20
16
12
8
ገ!!( kgf · cm )
4
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
2.0
1.6
1.2
0.8
0.4
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
2.0
1.6
1.2
0.8
0.4
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
10
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
50
40
30
20
ገ!!( kgf · cm )
10
0
1ݴߪ
2ݴߪ
50
40
30
20
ገ!!( kgf · cm )
10
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
5
4
3
2
1
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
5
4
3
2
1
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
步进电机用
10
9
8
7
6
5
4
I
ۉᇸۉୁ!(A)
3
C
2
1
0
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
20

规格
尺寸
成套件型
号
DC 输入
电机法兰尺寸
电机长度
单轴
双轴
保持转矩 N · m
转子惯量
重量
容许轴向负荷
容许径向负荷
注1) 负荷点为输出 轴顶端起1/3 的位置。
注 1
×10-4kg
kg 0.55 0.8
N15 15
N79 79
o
□
60mm (0.9
)
42mm 54mm
DB16S161S DB16S162S
DB16S161D DB16S162D
2
·
m
0.69 1.28
0.24 0.4
1 分割 fs
2 分割 fs
线圈电流 : 2A/ 相
脱出转矩
电源电流 ( 负荷时 )
电源电流 ( 无负荷时)
fs : 无负荷时的
最大自启动频率
1 分割
2 分割
DC24V
DC36V
10
8
6
4
ገ!!( kgf · cm )
2
0
1ݴߪ
2ݴߪ
10
8
6
4
ገ!!( kgf · cm )
2
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
1.0
0.8
0.6
0.4
0.2
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
1.0
0.8
0.6
0.4
0.2
0
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
10
9
8
7
6
5
4
3
2
1
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
10
9
8
7
6
5
4
3
2
1
0
fs
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
20
2.0
16
1.6
12
1.2
8
ገ!!( kgf · cm )
4
0
1ݴߪ
2ݴߪ
20
16
12
8
ገ!!( kgf · cm )
4
0
1ݴߪ
2ݴߪ
ገ!!(N · m )
ገ!!(N · m )
0.8
0.4
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
2.0
1.6
1.2
0.8
0.4
0
fs
fs
0.1 1 10 100
ஞ؋ೕ୲!(kpulse/s)
ገ! (min )
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
2000 3000 5000100 1000
2000 3000 5000100 1000
-1
ۉᇸۉୁ!(A)
ۉᇸۉୁ!(A)
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
10
9
8
7
6
5
4
ۉᇸۉୁ!(A)
3
2
1
0
21

驱动器规格
■单极
基本规格
功能
输入输出
信号
■双极
基本规格
功能
输入输出
信号
型号
输入电源 DC24V / 36V±10%
电源电流 3A
保护级别 级别Ⅲ
使用环境 设置范畴 ( 过电压范畴 ) : Ⅰ污损度 : 2
适用规格 EN61010-1,UL508C
使用环境温度 0 ~+50℃
保存温度
使用环境湿度 35 ~ 85%RH ( 无结露 )
环境
保存湿度 10 ~ 90%RH ( 无结露 )
使用高度 海拔 1000m 以下
振动 4.9m/s 频率范围 10 ~ 55Hz X.Y.Z 各方向 2H 进行试验
冲击 根据 NDS-C-0110 规格 3.2.2 项区分“C”,无异常
绝缘耐压 电源输入端子 - 机箱间施加 AC0.5kV 的电压 1 分钟,无异常
绝缘电阻 电源输入端子 - 机箱间 DC500V 用兆欧表测定在 10MΩ以上
重量 (g) 80
选择功能 步距角、脉冲输入方式、低振动模式、停止时电流、运转电流
保护功能 主电路电源电压下降
LED 显示 电源显示器、报警显示
指令脉冲输入信号
衰减输入信号
相原点显示输出信号
报警输出信号
型号
输入电源 DC24V / 36V±10%
电源电流 3A
保护级别 级别Ⅲ
使用环境 设置范畴 ( 过电压范畴 ) : Ⅰ污损度 : 2
适用规格 EN61010-1,UL508C
使用周围温度 0 ~+50℃
保存温度
使用周围湿度 35 ~ 85%RH ( 无结露 )
环境
保存湿度 10 ~ 90%RH ( 无结露 )
使用高度 海拔 1000m 以下
振动 4.9m/s 频率范围 10 ~ 55Hz X.Y.Z 各方向 2H 进行试验
冲击 根据 NDS-C-0110 规格 3.2.2 项区分“C”,无异常
绝缘耐压 电源输入端子 - 机箱间施加 AC0.5kV 的电压 1 分钟,无异常
绝缘电阻 电源输入端子 - 机箱间 DC500V 用兆欧表测定在 10MΩ以上
重量 (g) 80
选择功能 步距角、脉冲输入方式、低振动模式、停止时电流、运转电流
保护功能 缺相保护
LED 显示 电源显示器、报警显示
指令脉冲输入信号
衰减输入信号
相原点显示输出信号
报警输出信号
US1D200P10
-
20 ~+70℃
光耦输入方式,输入电阻 220Ω
输入信号电压“H”级别 : 4.0 ~ 5.5V“
最大输入频率 35kpulse/s
光耦输入方式,输入电阻 220Ω
输入信号电压“H”级别 : 4.0 ~ 5.5V“L”级别 : 0 ~ 0.5V
用光耦的开路集电极输出
输出信号规格 Vceo : 40V 以下 Ic : 10mA 以下
用光耦的开路集电极输出
输出信号规格 Vceo : 40V 以下 Ic : 10mA 以下
BS1D200P10
-
20 ~+70℃
光耦输入方式,输入电阻 220Ω
输入信号电压“H”级别 : 4.0 ~ 5.5V“L
最大输入频率 150kpulse/s
光耦输入方式,输入电阻 220Ω
输入信号电压“H”级别 : 4.0 ~ 5.5V“L”级别 : 0 ~ 0.5V
用光耦的开路集电极输出
输出信号规格 Vceo : 40V 以下 Ic : 10mA 以下
用光耦的开路集电极输出
输出信号规格 Vceo : 40V 以下 Ic : 10mA 以下
L”级别 : 0 ~ 0.5V
”级别 : 0 ~ 0.5V
驱动器内置
成套件型号
步进电机
外形图
步进电机用
I
C
22

DC 输入
规格
运转·连接·功能
■驱动器各部名称
单极
3
7
5
1 电源连接器 (CN3)
连接主电路电源。
2 输入输出信号连接器 (CN1)
连接输入输出信号。
3 确立电源显示LED (POW)
主电路电源确立后灯亮。
5 运转电流选择开关 (RUN)
选择电机运转时的电流值。
6 报警显示用LED (ALM)
报警时灯亮。
7 电机连接器 (CN2)
连接电机动力线。
4 功能选择拨码开关
根据规格,进行功能选择。
4
双极
7
1
3
5
2 6
1 电源连接器 (CN3)
连接主电路电源。
2 输入输出信号连接器 (CN1)
连接输入输出信号。
3 确立电源显示LED (POW)
主电路电源确立后灯亮。
4 功能选择拨码开关
5 运转电流选择开关 (RUN)
选择电机运转时的电流值。
6 报警显示用LED (ALM)
报警时灯亮。
7 电机连接器 (CN2)
连接电机动力线。
根据规格,进行功能选择。
4
1
2
6
■输入输出信号的概略规格
信号名称 CN1 针 No. 概略功能
CW 脉冲输入
( 标准 )
脉冲串输入
CCW 脉冲输入
( 标准 )
旋转方向输入
衰减输入
相原点显示输出
报警输出
※ 电机的旋转方向为CW方向是指,从输出轴侧观察电机顺时针方向旋转。
CCW方向是指,从输出轴侧观察电机逆时针方向旋转。
1
2 输入方式时
2
输入 CW 方向旋转的驱动脉 冲。
1
1 输入方式时
2
输入电机旋转用的驱动脉冲串。
3
2 输入方式时
4
输入 CCW 方向旋转的驱动脉冲串。
1 输入方式时输入电机的旋转方向信号。
3
内部光耦 ON…CW 方向
4
内部光耦 ON…CCW 方向
通过输入 PD 信号,来阻断流向电机的电流。
5
内部光耦 ON…PD 功能有效
6
内部光耦 ON…PD 功能无效
励磁相为原点 (接通电源时的状态 ) 时,设 为 ON。
7
全步时,每 10 个脉冲 1 次设为 ON,
8
半步时,每 20 个脉冲 1 次设为 ON。
9
驱动器内部的报警电路动作时,向外部输出信号。
10
此时,步进电机处于无励磁状态。
23

4
功能选择拨码开关
可利用拨码开关,选择符合规格的功能。
交货时的设定如下所示,请确认。
OFF ON
EX1
EX2
EX3
F/R
ACD1
ACD2
LV
EORG
OFF
OFF 分割数: 8
OFF
OFF 2 输入方式 (CW,CCW脉冲输入)
OFF
停止时电流: 运转电流的40%
OFF
OFF 细分动作
OFF 相原点
步距角选择 (EX1,EX2,EX3)
选择基本步距角的分割数。
EX1 EX2 EX3 分割数
ON ON ON 1 分割
OFF ON OFF 2 分割
ON OFF OFF 4 分割
OFF OFF OFF 8 分割
OFF OFF ON 16 分割
输入方式选择 (F/R)
选择输入脉冲方式。
F/R 输入脉 冲方式
ON 1 输入方式 (CK,U/D)
OFF 2 输入方式 (CW,CCW )
停止时电流选择 (ACD1,ACD2)
选择停止时的电机电流值。
ACD2 ACD1 电机电流
ON ON 运转电流的10 0%
ON OFF 运转电流的 60%
OFF ON 运转电流的 50%
OFF OFF 运转电流的 40%
※ EORG调至ON后,保存电源断开时的励磁相。由此,在接 通电源时,轴
不变位。
低振动模式选择 (LV)
即使设定为较粗的分辨率 (1分割、2分割等),也能够
低振动且平稳运转。
LV 初始励磁相
ON 低振动动作
OFF 细分动作
驱动器内置
成套件型号
励磁选择 (EORG)
选择电源接通时的励磁相。
EORG 初始励磁相
ON 电源断开时的励磁相
OFF 相原点
※EORG调至ON后,保存电源断开时的励磁相。由此,在接通电源时,轴
不变位。
2 7
外部连接图
单极 双极
CN2
1
2
3
4
5
6
ӣ
M
ઢ
ࢤ
ࣜ
၎ᇱۅ၂๖
CWஞ؋
CCWஞ؋
ປ
၎ᇱۅ၂๖
Ԓয়
DC24V/36V
DC24G/36G
CN1
1
2
3
4
5
6
7
8
9
10
CN3
1
2
CWஞ؋
CCWஞ؋
ປ
Ԓয়
DC24V/36V
DC24G/36G
10
CN3
步进电机
CN2CN1
2
3
4
5
6
7
8
9
1
2
11
2
3
4
ઢ
ࢤ
ࣜ
外形图
M
步进电机用
■使用电线尺寸
部位 电线尺寸 允许配线长
电源用
输入信号用
电机用
AWG22 (0.3mm2 ) 2m MAX.
AWG24 (0.2mm2 )~AWG22 (0.3mm2 ) 2m MAX.
AWG22 (0.3mm2 ) 3m MAX.
I
C
24

规格
CW (CK),CCW (U/D) 的输入电路结构
· 脉冲占空比请设为50%以下。
+5V
႑ࡽ
R
■
输入信号规格
光耦类型
1 (3)
2 (4)
3
220ˮ
1000pF
ൻۯഗ
sᅜฉ
· 最大输入频率为150kpulse/s。
· 输入信号的波高值超过5V时,用外部限制电阻R将输入电流设
为约15mA。
4.0ċ5.5V
ۉୟۯፕ
0ċ0.5V
1sᅜူ
■
指令脉冲的时序
2 输入方式 (CW,CCW)
ON
CWஞ؋
OFF
ON
CCWஞ؋
OFF
90%
50%
10%
1
sᅜူ
· ■内部光耦为 “ON”,在光耦“ON”的上升边缘,内部电路 (电机) 动作。
· 对CW施加脉冲时,CCW侧内部光耦请为“OFF”。
· 对CCW施加脉冲时,CCW侧内部光耦请为“OFF”。
ᅜฉ
50s
1 输入方式 (CK,U/D)
ON
OFF
ON
OFF
25
50µs
ᅜฉ
10µs
· ■内部光耦为“ON”,在CK侧光耦“ON”的上升边缘,内部电路 (电机) 动作。
· CK侧内部光耦为“OFF”时 进 行 U/D 的输入信号切换。
ᅜฉ

PD的输入电路结构
ˮ
220
+5V
5
1000pF
驱动器内置
· 输入信号的波高值超过5V时,用外部限制电阻R将输入电流设
为约15mA。
႑ࡽ
6
R
ൻۯഗ
MON,AL的输出电路结构
MAX. 10mA
7(9)
MAX. 40V
8(10)
ൻۯഗ
MON输出
CWஞ؋
CCWஞ؋
MON
· 电机的励磁相为原点 (接通电源时的状态) 时,光耦为 “ON”。
(分割数设定为2)
· MON输出从相原点,按电机的输出轴每7. 2°进行输出。
成套件型号
步进电机
I
C
26
外形图
步进电机用

步进电机
规格
2 相步进电机
□
28mm
103H32 □□
1.8°/ 步
单极线圈、连接器类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴 N · m 以上 A/相Ω/ 相 mH / 相×10
103H3205-5040 -5010
103H3205-5140 -5110
103H3215-5140 -5110
103H3215-5240 -5210
0.032 0.25 40 9.1 0.009 0.11
0.032 0.5 9.4 2.4 0.009 0.11
0.062 0.5 11 3.1 0.016 0.2
0.062 1 2.6 0.8 0.016 0.2
单极线圈、引线类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴 N · m 以上
103H3205-5070 -5030
103H3205-5170 -5130
103H3205-5270 -5230
103H3215-5170 -5130
103H3215-5270 -5230
0.032 0.25 40 9.1 0.009 0.11
0.032 0.5 9.4 2.4 0.009 0.11
0.032 1 2.4 0.53 0.009 0.11
0.062 0.5 11 3.1 0.016 0.2
0.062 1 2.6 0.8 0.016 0.2
A/相Ω/ 相 mH / 相
-4
kg · m
×10-4kg · m
2
2
kg
kg
双极线圈、引线类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴 N · m 以上
103H3205-5570 -5530
103H3205-5670 -5630
103H3205-5770 -5730
103H3215-5570 -5530
103H3215-5670 -5630
103H3215-5770 -5730
0.048 0.25 38.3 19.5 0.009 0.11
0.051 0.5 10.4 5.8 0.009 0.11
0.051 1 2.5 1.45 0.009 0.11
0.09 0.25 51.8 30.7 0.016 0.2
0.09 0.5 12.5 8 0.016 0.2
0.1 1 3.5 2.3 0.016 0.2
A/相Ω/ 相 mH / 相
×10-4kg · m
2
kg
27

■
脉冲频率- 转矩特性
● 103H3205-50□□
0.05
0.5
0.04
0.4
0.03
0.3
0.02
0.2
ገ (NĄm)
ገ (kgfĄcm)
0.01
0.1
ഔۯገ at JL2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.25A/相
2相励磁 (全步)
L1=0.01×10
J
L2=0.01×10
J
-4
kg · m2 (带轮平衡装置方式)
-4
kg · m2 (带轮平衡装置方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
● 103H3215-51□□
0.1
1.0
0.08
0.8
0.06
0.6
0.04
0.4
ገ (NĄm)
ገ (kgfĄcm)
0.02
0.2
L2
ഔۯገ at J
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.5A/相
2相励磁 (全步)
L1=0.01×10
J
L2=0.01×10
J
-4
kg · m2 (带轮平衡装置方式)
-4
kg · m2 (带轮平衡装置方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
● 103H3205-51□□
0.05
0.5
0.04
0.4
0.03
0.3
0.02
0.2
ገ (NĄm)
ገ (kgfĄcm)
0.01
0.1
ഔۯገ at J
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.5A/相
J
J
L1=0.01×10
L2=0.01×10
2相励磁 (全步)
-4
kg · m2 (带轮平衡装置方式)
-4
kg · m2 (带轮平衡装置方式)
ྃገ at JL1
L2
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
ገ (min
1
-
● 103H3215-52□□
0.1
1.0
0.08
0.8
0.06
0.6
0.04
0.4
ገ (NĄm)
ገ (kgfĄcm)
0.02
0.2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
J
J
L1=0.01×10
L2=0.01×10
2相励磁 (全步)
-4
kg · m2 (带轮平衡装置方式)
-4
kg · m2 (带轮平衡装置方式)
ྃገ at JL1
ഔۯገ at JL2
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
-
ገ (min
● 103H3205-52□□
0.05
0.5
0.04
0.4
0.03
0.3
0.02
0.2
ገ (NĄm)
ገ (kgfĄcm)
0.01
0.1
ഔۯገ at J
0
0
0.1 1 10 100
L2
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.5A/相
2相励磁 (全步)
L1=0.01×10
J
L2=0.01×10
J
-4
kg · m2 (带轮平衡装置方式)
-4
kg · m2 (带轮平衡装置方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
● 103H3205-55□□
0.1
1.0
0.08
0.8
0.06
0.6
0.04
0.4
ገ (NĄm)
ገ (kgfĄcm)
0.02
0.2
ഔۯገ at JL2
0
0
0.1 1 10 100
1
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.25A/相
2相励磁 (全步)
L1=0.01×10
J
L2=0.01×10
J
-4
kg · m2 (带轮平衡装置方式)
-4
kg · m2 (带轮平衡装置方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
驱动器内置
成套件型号
步进电机
● 103H3205-56□□
0.1
1.0
0.08
0.8
0.06
0.6
0.04
0.4
ገ (NĄm)
ገ (kgfĄcm)
0.02
0.2
ഔۯገ at JL2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.5A/相
2相励磁 (全步)
L1=0.01×10
J
JL2=0.01×10-4kg · m2 (带轮平衡装置方式)
-4
kg · m2 (带轮平衡装置方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
■ 103-H3215-56□□
0.1
1.0
0.08
0.8
0.06
0.6
0.04
0.4
ገ (NĄm)
ገ (kgfĄcm)
0.02
0.2
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.5A/相
L1=0.01×10
J
L2=0.01×10
J
ഔۯገ at JL2
0
0
0.1 1 10 100
2相励磁 (全步)
-4
kg · m2 (带轮平衡装置方式)
-4
kg · m2 (带轮平衡装置方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
● 103H3205-57□□
0.1
1.0
0.08
0.8
0.06
0.6
0.04
0.4
ገ (NĄm)
ገ (kgfĄcm)
0.02
0.2
ഔۯገ at JL2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
J
JL2=0.01×10-4kg · m2 (带轮平衡装置方式)
L1=0.01×10
2相励磁 (全步)
-4
kg · m2 (带轮平衡装置方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
● 103H3215-57□□
0.1
1.0
0.08
0.8
0.06
0.6
0.04
0.4
ገ (NĄm)
ገ (kgfĄcm)
0.02
0.2
ഔۯገ at JL2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
J
J
L1=0.01×10
L2=0.01×10
2相励磁 (全步)
-4
-4
ஞ؋ೕ୲ (kpulse/s)
kg · m2 (带轮平衡装置方式)
kg · m2 (带轮平衡装置方式)
ገ (min
1000 2000 3000 5000100
-
ྃገ at JL1
1
)
● 103H3215-55□□
0.1
1.0
0.08
0.8
0.06
0.6
0.04
0.4
ገ (NĄm)
ገ (kgfĄcm)
0.02
0.2
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.25A/相
L1=0.01×10
J
JL2=0.01×10-4kg · m2 (带轮平衡装置方式)
ഔۯገ at JL2
0
0
0.1 1 10 100
2相励磁 (全步)
-4
kg · m2 (带轮平衡装置方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
外形图
步进电机用
I
C
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
28

步进电机
规格
2相步进电机
□
35mm
SH35□□
步
1.8°/
单极线圈、引线类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
SH3533-12U40 -12U10
SH3537-12U40 -12U10
SH3552-12U40 -12U10
■
脉冲频率- 转矩特性
N · m 以上
0.12 1.2 2.4 1.3 0.02 0.17
0.15 1.2 2.7 2 0.025 0.2
0.23 1.2 3.4 2.8 0.043 0.3
A/相Ω/ 相 mH / 相
×10-4kg · m
●SH3533-12U40 ●SH3537-12U40 ●SH3552-12U40
0.2
2.0
0.16
1.6
0.12
1.2
(NĄm)
0.08
0.8
ገ
ገ (kgfĄcm)
0.04
0.4
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1.2A/相
2相励磁 (全步)
L1=0.33×10
J
-4
kg · m2 (橡胶联轴器方式)
ஞ؋ೕ୲ (kpulse/s)
ገ (min-1)
ྃገ at JL1
2000 3000 5000100 1000
0.2
2.0
0.16
1.6
0.12
1.2
(NĄm)
0.08
ገ
0.8
ገ (kgfĄcm)
0.04
0.4
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1.2A/相
2相励磁 (全步)
L1=0.33×10
J
-4
kg · m2 (橡胶联轴器方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
ገ (min-1)
2000 3000 5000100 1000
恒电流电路
电源电压 : DC24V · 线圈电流 : 1.2A/相
L1=0.94×10
J
0.5
5
0.4
4
0.3
3
(NĄm)
0.2
ገ
2
ገ (kgfĄcm)
0.1
1
0
0
0.1 1 10 100
2相励磁 (全步)
-4
kg · m2 (橡胶联轴器方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
20003000 5000100 1000
ገ (min-1)
2
kg
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
29

2相步进电机
0.5
0.5
□
42mm
SH142□
步
0.9°/
单极线圈、引线类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
SH1421-0441 -0411
SH1422-0441 -0411
SH1424-0441 -0411
■
脉冲频率- 转矩特性
●SH1421-04□□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0.0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1.2A/相
2相励磁 (全步)
-4
JL=0.94×10
kg · m2 (橡胶联轴器方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
-
ገ (min
N · m 以上
0.20 1.2 2.7 3.2 0.044 0.24
0.29 1.2 3.1 5.3 0.066 0.29
0.39 1.2 3.5 5.3 0.089 0.38
●SH1422-04□□ ●SH1424-04□□
5
4
3
2
ገ (kgfĄcm)
1
0
1000 2000 3000 5000100
1
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 1.2A/相
JL=0.94×10
A/相Ω/ 相 mH / 相
0.4
0.3
0.2
ገ (NĄm)
0.1
0.0
0.1 1 10 100
2相励磁 (全步)
-4
kg · m2 (橡胶联轴器方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
×10-4kg · m
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0.0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1.2A/相
2相励磁 (全步)
-4
JL=0.94×10
kg · m2 (橡胶联轴器方式)
2
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
1
-
)
驱动器内置
kg
成套件型号
步进电机
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
单极线圈、引线类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
SH1421-5241 -5211
SH1422-5241 -5211
SH1424-5241 -5211
■
脉冲频率- 转矩特性
●SH1421-52□□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0.0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
2相励磁 (全步)
-4
JL=0.94×10
kg · m2 (橡胶联轴器方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
ገ (min
N · m 以上
0.23 2 0.85 2.1 0.044 0.24
0.34 2 1.05 3.6 0.066 0.29
0.48 2 1.25 3.75 0.089 0.38
●SH1422-52□□ ●SH1424-52□□
5
4
3
2
ገ (kgfĄcm)
1
0
1000 2000 3000 5000100
1
-
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
JL=0.94×10
A/相Ω/ 相 mH / 相
0.4
0.3
0.2
ገ (NĄm)
0.1
0.0
0.1 1 10 100
2相励磁 (全步)
-4
kg · m2 (橡胶联轴器方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
×10-4kg · m
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0.0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
2相励磁 (全步)
JL=0.94×10-4kg · m2 (橡胶联轴器方式)
2
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
1
-
)
kg
外形图
步进电机用
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
I
C
30

步进电机
规格
2相步进电机
□
42mm
103H52 □□
步
1.8°/
单极线圈、连接器类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
103H5205-0440 -0 410
103H5208-0440 -0 410
103H5209-0440 -0 410
103H5210- 0440 -0 410
· m 以上
N
0.2 1.2 2.4 2.3 0.036 0.23
0.3 1.2 2.9 3.4 0.056 0.29
0.32 1.2 3 3.9 0.062 0.31
0.37 1.2 3.3 3.4 0.074 0.37
A/相Ω/ 相 mH / 相
×10-4kg · m
双极线圈、引线类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
103H5205-5040 -5010
103H5205-5140 -5110
103H5205-5240 -5210
103H5208-5040 -5010
103H5208-5140 -5110
103H5208-5240 -5210
103H5209-5040 -5010
103H5209-5140 -5110
103H5209-5240 -5210
103H5210-5040 -5010
103H5210-5140 -5110
103H5210-5240 -5210
N · m 以上
0.23 0.25 54 78 0.036 0.23
0.25 0.5 13.4 23.4 0.036 0.23
0.265 1 3.4 6.5 0.036 0.23
0.35 0.25 66 116 0.056 0.29
0.38 0.5 16.5 34 0.056 0.29
0.39 1 4.1 9.5 0.056 0.29
0.38 0.25 71.4 133 0.062 0.31
0.41 0.5 18.2 39 0.062 0.31
0.425 1 4.4 11 0.062 0.31
0.465 0.25 80 123.3 0.074 0.37
0.49 0.5 20 35 0.074 0.37
0.51 1 4.8 9.5 0.074 0.37
A/相Ω/ 相 mH / 相
×10-4kg · m
2
2
kg
kg
■
脉冲频率- 转矩特性
● 103H5205-04 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
恒电流电路
电源电压 : DC24V · 线圈电流 : 1.2A/相
L1=0.94 × 10
J
L2=0.8 × 10
J
ഔۯገ at JL2
0
0.1 1 10 100
ஞ؋ೕ୲ (kpulse/s)
ገ (min
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
31
1000 2000 3000 5000100
-
ྃገ at JL1
1
)
● 103H5208-04 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1.2A/相
2相励磁 (全步)
L1=0.94 × 10
J
L2=0.8 × 10
J
ྃገ at JL1
ഔۯገ at JL2
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
● 103H5209-04 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1.2A/相
2相励磁 (全步)
L1=0.94 × 10
J
L2=0.8 × 10
J
ྃገ at JL1
ഔۯገ at JL2
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
● 103H5210-04 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1.2A/相
2相励磁 (全步)
L1=0.94 × 10
J
L2=0.8 × 10
J
-4
ྃገ at JL1
ഔۯገ at JL2
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
-4
kg · m2 (使用橡胶联轴器)
kg · m2 (使用直联联轴器)

● 103H5205-50 □□
ገ (
)
ገ (
)
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.25A/相
L1=0.94 × 10
J
L2=0.8 × 10
J
ྃገ at JL1
ഔۯገ
at J
L2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
1000 2000 3000 5000100
1
-
)
● 103H5205-51 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
ഔۯገ
L2
at J
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.5A/相
J
J
2相励磁 (全步)
L1=0.94 × 10
L2=0.8 × 10
-4
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
kg · m2 (使用橡胶联轴器)
● 103H5205-52 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
ഔۯገ
L2
at J
0
0
0.1 1 10 100
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=0.94 × 10
J
L2=0.8 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
驱动器内置
● 103H5208-50 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.25A/相
L1=0.94 × 10
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ
at JL2
0
0.1 1 10 100
2相励磁 (全步)
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
min
-4
kg · m2 (使用橡胶联轴器)
● 103H5209-50 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.25A/相
L1=0.94 × 10
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ
L2
at J
0
0.1 1 10 100
2相励磁 (全步)
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
-4
kg · m2 (使用橡胶联轴器)
)
● 103H5208-51 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
ഔۯገ
at JL2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.5A/相
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
2相励磁 (全步)
L1=0.94 × 10
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
-4
kg · m2 (使用橡胶联轴器)
)
● 103H5209-51 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
ഔۯገ
at JL2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.5A/相
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
2相励磁 (全步)
L1=0.94 × 10
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
-4
kg · m2 (使用橡胶联轴器)
)
● 103H5208-52 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
ഔۯገ
at JL2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=0.94 × 10
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
min
● 103H5209-52 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
ഔۯገ
at JL2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=0.94 × 10
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
成套件型号
步进电机
外形图
● 103H5210-50 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.25A/相
L1=0.94 × 10
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ
at JL2
0
0.1 1 10 100
2相励磁 (全步)
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
-4
kg · m2 (使用橡胶联轴器)
)
● 103H5210-51 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
ഔۯገ
at JL2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 0.5A/相
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
2相励磁 (全步)
L1=0.94 × 10
-4
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
kg · m2 (使用橡胶联轴器)
● 103H5210-52 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
ഔۯገ
at JL2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=0.94 × 10
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
-4
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
kg · m2 (使用橡胶联轴器)
I
C
32
步进电机用

步进电机
规格
2相步进电机
□
50mm
103H670 □
步
1.8°/
单极线圈、引线类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
103H6701-0140 -0110
103H6701-0440 -0410
103H6701-0740 -0710
103H6703-0140 -0110
103H6703-0440 -0410
103H6703-0740 -0710
103H6704-0140 -0110
103H6704-0440 -0410
103H6704-0740 -0710
· m 以上
N
0.28 1 4.3 6.8 0.057 0.35
0.28 2 1.1 1.6 0.057 0.35
0.28 3 0.6 0.7 0.057 0.35
0.49 1 6 13 0.118 0.5
0.49 2 1.6 3.2 0.118 0.5
0.49 3 0.83 1.4 0.118 0.5
0.53 1 6.5 16.5 0.14 0.55
0.52 2 1.7 3.8 0.14 0.55
0.53 3 0.9 1.7 0.14 0.55
A/相Ω/ 相 mH / 相
双极线圈
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
103H 6701-5040 -5010
103H 6703-5040 -5010
103H6704-5040 -5010
N · m 以上
0.28 2 0.6 1.6 0.057 0.35
0.49 2 0.8 3.2 0.118 0.5
0.52 2 0.9 3.8 0.14 0.55
A/相Ω/ 相 mH / 相
×10-4kg · m
×10-4kg · m
2
2
kg
kg
33

■
)
脉冲频率- 转矩特性
● 103H6701-01 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=0.94 × 10
J
L2=0.8 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
● 103H6703-01 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=0.94 × 10
J
L2=0.8 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
● 103H6701-04 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0
1
-
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
L1=0.94 × 10
J
L2=0.8 × 10
J
ഔۯገ!at JL2
0.1 1 10 100
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
● 103H6703-04 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0
0.1 1 10 100
1
-
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
L1=0.94 × 10
J
L2=0.8 × 10
J
ഔۯገ!at JL2
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
● 103H6701-07 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
2相励磁 (全步)
L1=0.94 × 10
J
L2=0.8 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
ྃገ at JL1
1000 2000 3000 5000100
● 103H6703-07 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
L1=0.94 × 10
J
L2=0.8 × 10
J
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
1000 2000 3000 5000100
1
-
)
ྃገ at JL1
1
-
)
驱动器内置
成套件型号
步进电机
● 103H6704-01 □□
1.0
10
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=0.94 × 10
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ഔۯገ!
L2
at J
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
1
-
● 103H6701-50 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
2相励磁 (全步)
L1=0.94 × 10
J
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
● 103H6704-04 □□
1.0
10
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
2相励磁 (全步)
L1=0.94 × 10
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
1
-
)
● 103H6703-50 □□
1
10
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
J
2相励磁 (全步)
L1=0.94 × 10
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
● 103H6704-07 □□
1.0
10
0.8
8
0.6
6
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
ྃገ at JL1
1000 2000 3000 5000100
1
-
)
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
2相励磁 (全步)
L1=0.94 × 10
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
-4
kg · m2 (使用橡胶联轴器)
● 103H6704-50 □□
1
10
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
ഔۯገ!
at JL2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
2相励磁 (全步)
L1=0.94 × 10
J
JL2=0.14 × 10-4kg · m2 (带轮平衡装置方式)
-4
kg · m2 (使用橡胶联轴器)
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
I
C
34
外形图
步进电机用

步进电机
规格
2相步进电机
□
56mm
103H712 □
1.8°/
步
单极线圈、引线类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
103H7121-0140 -0110
103H7121-0440 -0410
103H7121-0740 -0710
103H7123-0140 -0110
103H7123-0440 -0410
103H7123-0740 -0710
103H7124-0140 -0110
103H7124-0440 -0410
103H7124-0740 -0710
103H7126-0140 -0110
103H7126-0440 -0410
103H7126-0740 -0710
N · m 以上
0.39 14.880.10.47
0.39 2 1.25 1.9 0.1 0.47
0.39 3 0.6 0.8 0.1 0.47
0.83 1 6.7 15 0.21 0.65
0.83 2 1.6 3.8 0.21 0.65
0.78 3 0.77 1.58 0.21 0.65
0.98 1714.50.2450.8
0.98 2 1.7 3.1 0.245 0.8
0.98 3 0.74 1.4 0.245 0.8
1.27 1 8.6 19 0. 36 0. 98
1.27 224.50.360.98
1.27 3 0.9 2.2 0.36 0.98
A/相Ω/ 相 mH / 相
×10-4kg · m
2
kg
双极线圈、引线类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
103H7121-5640 -5610
103H7121-5740 -5710
103H7121-5840 -5810
103H7123-5640 -5610
103H7123-5740 -5710
103H7123-5840 -5810
103H7126-5640 -5610
103H7126-5740 -5710
103H7126-5840 -5810
103H7128-5640 -5610
103H7128-5740 -5710
103H7128-5840 -5810
N · m 以上
0.55 1 4.3 14.5 0.1 0.47
0.55 2 1.1 3.7 0.1 0.47
0.55 3 0.54 1.74 0.1 0.47
1.0 1 5.7 29 .4 0. 21 0.6 5
1.0 2 1.5 7.5 0.21 0.6 5
1.0 3 0.7 3.5 0.21 0.65
1.6 1 7.7 34 .6 0. 36 0.98
1.6 229.10.360.98
1.6 3 0.9 4 4 0. 36 0. 98
2.0 1 8.9 40.1 0.49 1.3
2.0 2 2.3 10.4 0.49 1.3
2.0 3 1.03 4.3 0.49 1.3
A/相Ω/ 相 mH / 相
×10-4kg · m
2
kg
35

■
)
脉冲频率- 转矩特性
● 103H7121-01 □□
0.5
5
0.4
4
0.3
3
ྃገ at JL1
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
L1=0.94 × 10
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
1000 2000 3000 5000100
1
-
)
● 103H7123-01 □□
1.0
10
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
ഔۯገ!
at J
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=0.94 × 10
J
L2=0.8 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
L2
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
● 103H7121-04 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
L1=0.94 × 10
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
ഔۯገ!at JL2
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
● 103H7123-04 □□
1.0
10
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
J
J
2相励磁 (全步)
L1=0.94 × 10
L2=0.8 × 10
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
ገ (min
1
-
)
● 103H7121-07 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
L1=0.94 × 10
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
ഔۯገ!at JL2
0
0.1 1 10 100
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
● 103H7123-07 □□
1.0
10
0.8
8
0.6
6
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
ྃገ at JL1
1000 2000 3000 5000100
1
-
)
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
2相励磁 (全步)
L1=0.94 × 10
J
L2=0.8 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
驱动器内置
成套件型号
步进电机
● 103H7124-01 □□
1.0
10
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=2.6 × 10
J
L2=2.6 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
● 103H7126-01 □□
2
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=2.6 × 10
J
L2=2.6 × 10
J
ྃገ at JL1
ഔۯገ
L2
!at J
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
ገ (min
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
● 103H7124-04 □□
1.0
10
0.8
8
0.6
6
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
ྃገ at JL1
1000 2000 3000 5000100
1
-
)
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
1
-
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
J
J
L1=2.6 × 10
L2=2.6 × 10
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
● 103H7126-04 □□
2
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
1
-
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
J
J
L1=2.6 × 10
L2=2.6 × 10
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
1
-
)
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
● 103H7124-07 □□
1.0
10
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
L1=2.6 × 10
J
L2=2.6 × 10
J
ഔۯገ!at JL2
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
ገ (min
● 103H7126-07 □□
2
20
1.6
16
1.2
12
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
ྃገ at JL1
1000 2000 3000 5000100
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
2相励磁 (全步)
L1=2.6 × 10
J
L2=2.6 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
1
-
)
外形图
步进电机用
I
1
-
)
C
36

● 103H7121-56 □□
1.0
10
● 103H7121-57 □□
1.0
10
● 103H7121-58 □□
1.0
10
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=0.94 × 10
J
L2=0.8 × 10
J
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
ገ (min
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
1
-
)
● 103H7123-56 □□
2.0
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
L1=2.6 × 10
J
JL2=2.6 × 10-4kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ
L2
at J
ஞ؋ೕ୲ (kpulse/s)
ገ (min
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
1000 2000 3000 5000100
1
-
)
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
J
J
2相励磁 (全步)
L1=0.94 × 10
L2=0.8 × 10
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
1
-
)
● 103H7123-57 □□
2.0
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
J
JL2=2.6 × 10-4kg · m2 (使用直联联轴器)
L1=2.6 × 10
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
ഔۯገ!
L2
at J
ஞ؋ೕ୲ (kpulse/s)
ገ (min
ྃገ at JL1
1000 2000 3000 5000100
1
-
)
0.8
8
0.6
6
ྃገ at JL1
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
L1=0.94 × 10
J
L2=0.8 × 10
J
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
1000 2000 3000 5000100
1
-
)
● 103H7123-58 □□
2.0
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
2相励磁 (全步)
L1=2.6 × 10
J
JL2=2.6 × 10-4kg · m2 (使用直联联轴器)
-4
kg · m2 (使用橡胶联轴器)
ഔۯገ!
L2
at J
ஞ؋ೕ୲ (kpulse/s)
ገ (min
ྃገ at JL1
1000 2000 3000 5000100
1
-
)
● 103H7126-56 □□
2.0
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
ഔۯገ!
at J
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=2.6 × 10
J
JL2=2.6 × 10-4kg · m2 (使用直联联轴器)
ྃገ at JL1
L2
ஞ؋ೕ୲ (kpulse/s)
-4
kg · m2 (使用橡胶联轴器)
● 103H7128-56 □□
5.0
50
4.0
40
3.0
30
2.0
20
ገ (NĄm)
ገ (kgfĄcm)
10
0
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
L1=7.4 × 10
J
JL2=7.4 × 10-4kg · m2 (使用直联联轴器)
ྃገ at JL1
1.0
ഔۯገ!
L2
at J
0
0.1 1 10 100
2相励磁 (全步)
-4
ஞ؋ೕ୲ (kpulse/s)
kg · m2 (使用橡胶联轴器)
37
1000 2000 3000 5000100
ገ (min
ገ (min
● 103H7126-57 □□
2.0
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
1
-
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
J
JL2=2.6 × 10-4kg · m2 (使用直联联轴器)
L1=2.6 × 10
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ഔۯገ!
L2
at J
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
ገ (min
1
-
)
● 103H7128-57 □□
5.0
50
4.0
40
3.0
30
2.0
20
ገ (NĄm)
ገ (kgfĄcm)
1.0
10
ഔۯገ!
L2
at J
0
0
0.1 1 10 100
1000 2000 3000 5000100
1
-
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
J
JL2=7.4 × 10-4kg · m2 (使用直联联轴器)
L1=7.4 × 10
2相励磁 (全步)
-4
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
kg · m2 (使用橡胶联轴器)
● 103H7126-58 □□
2.0
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
ྃገ at JL1
ഔۯገat JL2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
2相励磁 (全步)
L1=2.6 × 10
J
JL2=2.6 × 10-4kg · m2 (使用直联联轴器)
-4
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
kg · m2 (使用橡胶联轴器)
● 103H7128-58 □□
5.0
50
4.0
40
3.0
30
2.0
20
ገ (NĄm)
ገ (kgfĄcm)
1.0
10
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=7.4 × 10
J
JL2=7.4 × 10-4kg · m2 (使用直联联轴器)
-4
kg · m2 (使用橡胶联轴器)
ഔۯገ!
L2
at J
ஞ؋ೕ୲ (kpulse/s)
ገ (min
ྃገ at JL1
1000 2000 3000 5000100
1
-
)
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。

2相步进电机
0.5
2.0
□
60mm
SH160 □
步
0.9°/
单极线圈、引线类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
SH1601-0440 -0410
SH1602-0440 -0410
SH1603-0440 -0410
■
脉冲频率- 转矩特性
N · m 以上
0.57 2 1.35 2 0.24 0.55
1.1 2 1. 8 3.5 0.4 0. 8
1.7 2 2 .3 4.5 0.7 5 1.2
A/相Ω/ 相 mH / 相
×10-4kg · m
● SH1601-04□□ ● SH1602-04□□ ● SH1603-04□□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0.0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
2相励磁 (全步)
L1=0.94 × 10
J
-4
kg · m2 (橡胶联轴器方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
ገ (min
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0.0
0.1 1 10 100
1000 2000 3000 5000100
1
-
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
J
L1=2.6 × 10
2相励磁 (全步)
-4
kg · m2 (橡胶联轴器方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
1
-
)
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0.0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
2相励磁 (全步)
L1=7.4 × 10
J
-4
kg · m2 (橡胶联轴器方式)
2
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
驱动器内置
kg
成套件型号
步进电机
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
双极线圈、引线类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
SH1601-5240 -5210
SH1602-5240 -5210
SH1603-5240 -5210
■
脉冲频率- 转矩特性
N · m 以上
0.69 2 1.2 3.5 0.24 0.55
1.28 2 1. 65 6 .1 0.4 0. 8
2.15 2 2.3 8.8 0.75 1.2
● SH1601-52□□ ● SH1602-52□□ ● SH1603-52□□
1.0
10
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0.0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
2相励磁 (全步)
L1=0.94 × 10
J
L2=2.6 × 10
J
JL3=7.4 × 10-4kg · m2 (橡胶联轴器方式)
-4
kg · m2 (橡胶联轴器方式)
-4
kg · m2 (橡胶联轴器方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
20
16
12
8
ገ (kgfĄcm)
4
0
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
L1=0.94 × 10
J
L2=2.6 × 10
J
JL3=7.4 × 10-4kg · m2 (橡胶联轴器方式)
A/相Ω/ 相 mH / 相
1.2
0.8
0.4
ገ (NĄm)
0.4
0.0
0.1 1 10 100
2相励磁 (全步)
-4
kg · m2 (橡胶联轴器方式)
-4
kg · m2 (橡胶联轴器方式)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
×10-4kg · m
4.0
40
3.2
36
2.4
24
1.6
16
ገ (NĄm)
ገ (kgfĄcm)
0.8
8
0
0.0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
2相励磁 (全步)
L1=0.94 × 10
J
L2=2.6 × 10
J
JL3=7.4 × 10-4kg · m2 (橡胶联轴器方式)
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
ஞ؋ೕ୲ (kpulse/s)
ገ (min
-4
kg · m2 (橡胶联轴器方式)
-4
kg · m2 (橡胶联轴器方式)
2
ྃገ at JL1
1000 2000 3000 5000100
1
-
)
kg
外形图
步进电机用
I
C
38

步进电机
规格
2相步进电机
□
60mm
103H782 □
步
1.8°/
单极线圈、连接器类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
103H7821-0140 -0110
103H7821-0440 -0410
103H7821-0740 -0710
103H7822-0140 -0110
103H7822-0440 -0410
103H7822-0740 -0710
103H7823-0140 -0110
103H7823-0440 -0410
103H7823-0740 -0710
· m 以上
N
0.78 1 5.7 8.3 0.275 0.6
0.78 2 1.5 2 0.275 0.6
0.78 3 0.68 0.8 0.275 0.6
1.17 1 6 .9 14 0. 4 0 .77
1.17 2 1. 8 3.6 0.4 0.7 7
1.17 3 0 .8 1.38 0.4 0.7 7
2.1 1 10 21.7 0.84 1.34
2.1 2 2.7 5.6 0.84 1.34
2.1 3 1.25 2.4 0.84 1.34
A/相Ω/ 相 mH / 相
×10-4kg · m
2
kg
双极线圈、连接器类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
103H7821-5740 -5710
103H7821-1740 -1710
103H7822-5740 -5710
103H7822-1740 -1710
103H7823-5740 -5710
103H7823-1740 -1710
■
脉冲频率- 转矩特性
● 103H7821-01 □□
1.0
10
N · m 以上
0.88 2 1.27 3.3 0.275 0.6
0.88 4 0.35 0.8 0.275 0.6
1.37 2 1. 55 5.5 0 .4 0 .77
1.37 4 0 .43 1. 38 0. 4 0. 77
2.7 2 2.4 9.5 0.84 1.34
2.7 4 0.65 2.4 0.84 1.34
● 103H7821-04 □□
10
A/相 Ω/ 相 mH / 相
1.0
● 103H7821-07 □□
1.0
10
×10-4kg · m
2
kg
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=0.94 × 10
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
-4
kg · m2 (使用橡胶联轴器)
39
ྃገ at JL1
1000 2000 3000 5000100
-
ገ (min
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
1
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
2相励磁 (全步)
L1=0.94 × 10
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
ገ (min
1
-
)
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
L1=0.94 × 10
J
JL2=0.8 × 10-4kg · m2 (使用直联联轴器)
ഔۯገ!at JL2
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)

■
脉冲频率- 转矩特性
● 103H7822-01 □□
2
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=7.4 × 10
J
L2=7.4 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯ
L2
ገ!at J
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
● 103H7823-01 □□
2
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
L1=7.4 × 10
J
L2=7.4 × 10
J
ྃገ at JL1
ഔۯገ!
L2
at J
ஞ؋ೕ୲ (kpulse/s)
ገ (min
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
1000 2000 3000 5000100
● 103H7822-04 □□
2
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
1
-
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
J
J
L1=7.4 × 10
L2=7.4 × 10
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
ྃገ at JL1
1000 2000 3000 5000100
1
-
)
● 103H7823-04 □□
2
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
1
-
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 2A/相
J
J
L1=7.4 × 10
L2=7.4 × 10
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
1
-
)
● 103H7822-07 □□
2
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
2相励磁 (全步)
L1=7.4 × 10
J
L2=7.4 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
● 103H7823-07 □□
2
20
1.6
16
1.2
12
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
ྃገ at JL1
1000 2000 3000 5000100
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
2相励磁 (全步)
L1=7.4 × 10
J
L2=7.4 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
驱动器内置
1
-
)
成套件型号
1
-
)
步进电机
● 103H7821-57 □□
2
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 4A/相
2相励磁 (全步)
L1=2.6 × 10
J
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
-
ገ (min
● 103H7822-17 □□
2
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 4A/相
2相励磁 (全步)
L1=2.6 × 10
J
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
-
ገ (min
● 103H7821-17 □□
1
10
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
1
)
恒电流电路
电源电压 : AC100V · 线圈电流 : 4A/相
J
L1=2.6 × 10
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
● 103H7823-57 □□
5
50
4
40
3
30
2
20
ገ (NĄm)
ገ (kgfĄcm)
1
10
0
0
0.1 1 10 100
1
)
恒电流电路
电源电压 : AC100V · 线圈电流 : 4A/相
J
L1=7.4 × 10
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
● 103H7822-57 □□
2
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 4A/相
2相励磁 (全步)
L1=2.6 × 10
J
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
-
ገ (min
● 103H7823-17 □□
5
50
4
40
3
30
2
20
ገ (NĄm)
ገ (kgfĄcm)
1
10
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 4A/相
2相励磁 (全步)
L1=7.4 × 10
J
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
)
外形图
步进电机用
I
C
1
-
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
40

步进电机
规格
2相步进电机
□
86mm
SH286□/ SM286 □
1.8°/
步
单极线圈、引线类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
SH2861-0441 -0411
SH2862-0441 -0411
SH2863-0441 -0411
N · m 以上
2.5 2 2.3 8.0 1.48 1.75
4.7 2 3.2 13.0 3 2.9
6.7 2 4.0 17 4.5 4.0
A/相Ω/ 相 mH / 相
×10-4kg · m
双极线圈、引线类型
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
SM2861-5051 -5021
SM2861-5151 -5121
SM2861-5251 -5221
SM2862-5051 -5021
SM2862-5151 -5121
SM2862-5251 -5221
SM2863-5051 -5021
SM2863-5151 -5121
SM2863-5251 -5221
N · m 以上
3.3 2 2.2 15 1.48 1.75
3.3 4 0.56 3.7 1.48 1.75
3.3 6 0.29 1.7 1.48 1.75
6.4 2 3.2 25 3.0 2.9
6.4 4 0.83 6.4 3.0 2.9
6.4 6 0.36 2.8 3.0 2.9
9 2 4.0 32 4.5 4.0
941.07.94.54.0
960.463.84.54.0
A/相 Ω/ 相 mH / 相
×10-4kg · m
2
2
kg
kg
41

ገ (
)
■
ገ (
)
ገ (
)
脉冲频率- 转矩特性
■ SH2861-04 □□
ஞ؋ೕ୲ (kpulse/s)
恒电流电路
电源电压 : AC100V · 线圈电流 : 2A/相
2相励磁 (全步)
L1=15 .3 × 10
J
-4
kg · m2 (使用橡胶联轴器)
■ SM2861-50 □□
4
40
30
3
20
2
ገ (NĄm)
ገ (kgfĄcm)
10
1
ྃገ at JL1
■ SH2862-04 □□
ஞ؋ೕ୲ (kpulse/s)
恒电流电路
电源电压 : AC100V · 线圈电流 : 2A/相
J
L1=15 .3 × 10
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
■ SM2861-51 □□
4
40
30
3
20
2
ገ (NĄm)
ገ (kgfĄcm)
10
1
ྃገ at JL1
■ SH2863-04 □□
ஞ؋ೕ୲ (kpulse/s)
恒电流电路
电源电压 : AC100V · 线圈电流 : 2A/相
2相励磁 (全步)
L1=15 .3 × 10
J
-4
kg · m2 (使用橡胶联轴器)
■ SM2861-52 □□
4
40
30
3
20
2
ገ (NĄm)
ገ (kgfĄcm)
10
1
ྃገ at JL1
驱动器内置
成套件型号
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 2A/相
2相励磁 (全步)
L1=7.4 × 10
J
-4
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
-
ገ (min
kg · m2 (使用橡胶联轴器)
■ SM2862-50 □□
10
100
8
80
6
60
4
40
ገ (NĄm)
ገ (kgfĄcm)
2
20
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 2A/相
2相励磁 (全步)
L1=15 .3 × 10
J
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
-
ገ (min
■ SM2863-50 □□
10
100
0
0
0.1 1 10 100
1
)
恒电流电路
电源电压 : AC100V · 线圈电流 : 4A/相
J
L1=7.4 × 10
2相励磁 (全步)
-4
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
kg · m2 (使用橡胶联轴器)
■ SM2862-51 □□
10
100
8
80
6
60
4
40
ገ (NĄm)
ገ (kgfĄcm)
2
20
0
0
0.1 1 10 100
1
)
恒电流电路
电源电压 : AC100V · 线圈电流 : 4A/相
J
L1=15 .3 × 10
2相励磁 (全步)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
■ SM2863-51 □□
10
100
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 6A/相
2相励磁 (全步)
L1=15 .3 × 10
J
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
-
min
-4
kg · m2 (使用橡胶联轴器)
■ SM2862-52 □□
10
100
8
80
6
60
4
40
ገ (NĄm)
ገ (kgfĄcm)
2
20
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 6A/相
2相励磁 (全步)
L1=15 .3 × 10
J
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
-
min
■ SM2863-52 □□
10
100
1
步进电机
外形图
1
8
80
6
60
4
40
ገ (NĄm)
ገ (kgfĄcm)
2
20
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 2A/相
2相励磁 (全步)
L1=43 × 10
J
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
ገ (min
8
80
6
60
4
40
ገ (NĄm)
ገ (kgfĄcm)
2
20
0
0
0.1 1 10 100
1
-
)
恒电流电路
电源电压 : AC100V · 线圈电流 : 4A/相
J
L1=43 × 10
2相励磁 (全步)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
1
-
ገ (min
)
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
8
80
6
60
4
40
ገ (NĄm)
ገ (kgfĄcm)
2
20
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 6A/相
2相励磁 (全步)
L1=43 × 10
J
-4
kg · m2 (使用直联联轴器)
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
-
min
ྃገ at JL1
1
I
C
42
步进电机用

步进电机
规格
2相步进电机
φ
106mm
103H8922 □
1.8°/
步
单极线圈
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
103H89222-0941 -0911
103H89223-0941 -0911
N · m 以上
10.8 4 0.98 6.3 14.6 7.5
15.5 4 1.4 9.7 22 10.5
A/相Ω/ 相 mH / 相
双极线圈
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
103H89222-5241 -5211
103H89223-5241 - 5211
N · m 以上
13.2 6 0.4 5 5.4 14. 6 7.5
19 6 0.6 3 8 22 10.5
A/相Ω/ 相 mH / 相
×10-4kg · m
×10-4kg · m
2
2
kg
kg
■
脉冲频率- 转矩特性
● 103H89222-09 □□
10
100
8
80
6
60
4
40
ገ (NĄm)
ገ (kgfĄcm)
2
20
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 4A/相
2相励磁 (全步)
L1=43 × 10
J
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
● 103H89223-52 □□
20
200
16
160
12
120
8
80
ገ (NĄm)
ገ (kgfĄcm)
4
40
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 6A/相
2相励磁 (全步)
L1=43 × 10
J
L2=43 × 10
J
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
43
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
1
-
)
● 103H89223-09 □□
20
200
16
160
12
120
8
80
ገ (NĄm)
ገ (kgfĄcm)
4
40
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 4A/相
J
L1=43 × 10
2相励磁 (全步)
ྃገ at JL1
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
-4
kg · m2 (使用橡胶联轴器)
● 103H89222-52 □□
20
200
16
160
12
120
8
80
ገ (NĄm)
ገ (kgfĄcm)
4
40
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 6A/相
2相励磁 (全步)
L1=43 × 10
J
L2=43 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
1
-
)

2相步进电机
ገ (
)
□
56mm
103H712 □
基于CE标志
步
1.8°/
单极线圈
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
103H7121-6140 -6110
103H7121-6740 -6710
103H7123-6140 -6110
103H7123-6740 -6710
103H7126-6140 -6110
103H7126-6740 -6710
N · m 以上
0.39 1 4.8 8 0.1 0.47
0.39 3 0.6 0.8 0.1 0.47
0.83 1 6.7 15 0.21 0.65
0.78 3 0.77 1.58 0.21 0.65
1.27 1 8.6 19 0.36 0.98
1.27 3 0.9 2.2 0.36 0.98
A/相Ω/ 相 mH / 相
×10-4kg · m
2
驱动器内置
kg
成套件型号
■
脉冲频率- 转矩特性
● 103H7121-61 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=0.94 × 10
J
L2=0.8 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
ྃገ at JL1
1000 2000 3000 5000100
● 103H7123-67 □□
1.0
10
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
2相励磁 (全步)
L1=0.94 × 10
J
L2=0.8 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
ገ (min
步进电机
● 103H7121-67 □□
0.5
5
0.4
4
0.3
3
0.2
2
ገ (NĄm)
ገ (kgfĄcm)
0.1
1
0
0
0.1 1 10 100
1
-
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
J
J
2相励磁 (全步)
L1=0.94 × 10
L2=0.8 × 10
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
1
-
)
● 103H7126-61 □□
2
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
1
-
)
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
L1=2.6 × 10
J
L2=2.6 × 10
J
ྃገ at JL1
ഔۯ
L2
ገ!at J
ஞ؋ೕ୲ (kpulse/s)
ገ (min
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
1000 2000 3000 5000100
1
-
)
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
● 103H7123-61 □□
1.0
10
0.8
8
0.6
6
0.4
4
ገ (NĄm)
ገ (kgfĄcm)
0.2
2
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 1A/相
2相励磁 (全步)
L1=0.94 × 10
J
L2=0.8 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯ
L2
ገ!at J
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
min
● 103H7126-67 □□
2
20
1.6
16
1.2
12
0.8
8
ገ (NĄm)
ገ (kgfĄcm)
0.4
4
0
0
0.1 1 10 100
恒电流电路
电源电压 : DC24V · 线圈电流 : 3A/相
2相励磁 (全步)
L1=2.6 × 10
J
L2=2.6 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
1
-
外形图
步进电机用
I
1
-
)
C
44

步进电机
规格
2相步进电机
φ
86mm
103H822 □
基于CE标志
步
1.8°/
双极线圈
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
103H8221-6240 -6210
103H8222-6340 -6310
103H8223-6340 -6310
N · m 以上
2.74 6 0. 3 1. 65 1.45 1.5
5.09 6 0.35 2.7 2.9 2.5
7.4 4 6 0 .4 5 3. 4 4 .4 3 .5
A/相Ω/ 相 mH / 相
×10-4kg · m
2
kg
■
脉冲频率- 转矩特性
● 103H8221-62 □□
5
50
4
40
3
30
2
20
ገ (NĄm)
ገ (kgfĄcm)
1
10
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 6A/相
2相励磁 (全步)
L1=7.4 × 10
J
L2=7.4 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
ገ (min
ྃገ at JL1
● 103H8222-63 □□
5
50
4
40
3
30
2
20
ገ (NĄm)
ገ (kgfĄcm)
1
10
0
0
0.1 1 10 100
1
-
)
恒电流电路
电源电压 : AC100V · 线圈电流 : 6A/相
J
J
2相励磁 (全步)
L1=15 .3 × 10
L2=15. 3 × 10
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用直联联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
ገ (min
1
-
)
● 103H8223-63 □□
10
100
8
80
6
60
4
40
ገ (NĄm)
ገ (kgfĄcm)
2
20
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 6A/相
2相励磁 (全步)
L1=43 × 10
J
L2=43 × 10
J
-4
kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
1000 2000 3000 5000100
ገ (min
-
1
)
45
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。

2相步进电机
φ
106mm
103H8922 □
基于CE标志
步
1.8°/
双极线圈
型号 保持转矩 2 相励磁时 额定电流 线圈电阻 线圈电感 转子惯量 重量
单轴 双轴
103H89222-6341 -6311
103H89223-6341 -6 311
N · m 以上
13.2 6 0.45 5.4 14.6 7.5
19 6 0.6 3 8 2 2 10 .5
A/相Ω/ 相 mH / 相
×10-4kg · m
2
驱动器内置
kg
成套件型号
■
脉冲频率- 转矩特性
● 103H89222-63 □□
20
200
16
160
12
120
8
80
ገ (NĄm)
ገ (kgfĄcm)
4
40
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 6A/相
2相励磁 (全步)
L1=43 × 10
J
JL2=43 × 10-4kg · m2 (使用橡胶联轴器)
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
1
-
)
● 103H89223-63 □□
20
200
16
160
12
120
8
80
ገ (NĄm)
ገ (kgfĄcm)
4
40
0
0
0.1 1 10 100
恒电流电路
电源电压 : AC100V · 线圈电流 : 6A/相
J
JL2=43 × 10-4kg · m2 (使用橡胶联轴器)
L1=43 × 10
2相励磁 (全步)
-4
kg · m2 (使用橡胶联轴器)
ྃገ at JL1
ഔۯገ!at JL2
ஞ؋ೕ୲ (kpulse/s)
ገ (min
1000 2000 3000 5000100
1
-
)
步进电机
外形图
在本公司驱动条件下的测定数据。根据客户的实机精度,驱动转矩可能会发生变化。
I
C
46
步进电机用

步进电机
规格
共通规格
电机类型 H系列电机
电机型号 103H32 □□,103H52 □□,103H67 □□,103H71 □□,103H78 □□
绝缘级别 B种 (+130℃)
绝缘耐压
绝缘电阻 DC500V 用兆欧表测定在100MΩ以上
耐振动 振幅1.52mm (P-P) 频率范围10~55Hz 扫描时间5分钟/周期 X,Y,Z各方向2小时
耐冲击 加速度 98m/s
使用环境温度 -10℃~+50℃
使用环境湿度 90% 以下 : 低于40℃ 57% 以下 : 低于50℃ 35% 以下 : 低于60℃ (无结露)
电机类型 SH系列电机
电机型号 SH353□,SH142□,SH160□,SH286□
绝缘级别 B 种 (+130℃)
绝缘耐压
绝缘电阻 DC500V 用兆欧表测定在100MΩ以上
耐振动 振幅1.52mm (P-P) 频率范围10~55Hz 扫描时间5分钟/ 周期 X,Y,Z¸ 各方向2小时
耐冲击 加速度 98m/s
使用环境温度 -10℃~+50℃
使用环境湿度 90%以下 : 低于40℃ 57%以下 : 低于50℃ 35%以下 : 低于60℃ (无结露)
电机类型 SM系列电机
电机型号 SM286□
使用形式 S1 (连续使用)
绝缘级别 F种 (+155℃)
使用高度 海拔1000m以下
绝缘耐压
绝缘电阻 DC500V 用兆欧表测定在100MΩ以上
保护等级 IP40
耐振动 振幅1.52mm (P-P) 频率范围10~500Hz 扫描时间15分钟/ 周期 X,Y,Z 各方向扫描次数12次
耐冲击 加速度490m/s
使用环境温度 -10~+50℃
使用环境湿度 90% 以下 : 低于40℃ 57% 以下 : 低于50℃ 35% 以下 : 低于60℃ (无结露)
□
28 · □ 42 : AC500V 50/60Hz 1分钟 □ 50 · □ 56 · □ 60 : AC1000V 50/60Hz 1分钟
2
持续时间 11ms 半波正弦波 X,Y,Z各方向3次 合计18次
□
35 · □ 42 : AC500V 50/60Hz 1分钟 □ 60 · □ 86 : AC1000V 50/60Hz 1分钟
2
持续时间 11ms 半波正弦波 X,Y,Z各方向3次 合计18次
□
86 : AC1500V 50/60Hz 1分钟
2
, 持续时间11ms 半波正弦波 X,Y,Z 各方向3次 合计18次
容许径向负荷 · 容许轴向负荷
从轴前端的距离 (mm)
轴向负荷 (N)0 5 10 15
径向负荷 (N)
22 26 33 46 10
70 87 114 165 20
167 193 229 280 60
০ၠࢁ
ዡၠࢁ
法兰尺寸 型 号
□
28mm 103H32□□ 30 38 53 84 3
□
35mm SH353□ 40 50 67 98 10
□
42mm
□
50mm 103H670□ 71 87 115 167 15
□
56mm
□
60mm
□
86mm
φ
86mm 103H822□ 191 234 301 421 60
φ
106mm 103H8922□ 321 356 401 457 100
103H52□□
SH142□
103H712□ 52 65 85 123 15
103H7128 85 105 138 200 15
103H782□
SH160□
SM286□
SH286□
规格 (基于CE标志的机型)
型号 103H712□ 103H822 □/ 103H8922 □
额定电压 12-200VDC 12-3 00VDC
适用规格 (低电压指令) EN60034-1,IEC34-5 (EN60034-5),EN60204-1,EN60950,EN61010-1
使用形式 S1 (连续额定)
保护等级 IP43
设备区分 级别I
使用环境 污损度2
绝缘级别 B种 (130℃)
绝缘电阻 常温常湿下,电机线圈-机架间0.5kVDC 用兆欧表测定的值在100MΩ以上。
绝缘耐压 常温常湿下,电机线圈-机架间施加50 / 60Hz,1.6kVAC (103H712 □ ,1.5kVAC) 1分钟 (泄漏电流10mA),但未发现异常。
使用环境温度 -10~+50℃
使用环境湿度 90% 以下 : 低于40℃ 57% 以下 : 低于50℃ 35% 以下 : 低于60℃ (无结露)
线圈温度上升 80K 以下 (条件依据山洋标准。)
47

内部连线和旋转方向
单极连线
●
103H32
(4)
(6)
(2)
●
103H52
(2)
(1)
(3)
●103H782
(2)
(1)
(3)
□□ 连接器类型
内部连线
( ) 连接器针No.
(5) (1) (3)
□□ 连接器类型
内部连线
( ) 连接器针No.
(5) (6) (4)
□ 连接器类型
内部连线
( ) 连接器针No.
(4)
(6) (5)
旋转方向
按照以下顺序直流励磁时,旋转方向从输出侧观察为顺时针方向旋转。
连接器类型针No.
连接器
励
磁
顺
序
(1.6)
(5)
(2)
(3)
(4)
+
–
1
+
2
+
3
+
4
–
–
–
–
–
–
–
旋转方向
按照以下顺序直流励磁时,旋转方向从输出侧观察为顺时针方向旋转。
连接器类型针No.
(3)
(4)
(1.6)
(5)
励
磁
顺
序
+
1
+
2
+
3
+
4
–
–
–
–
(2)
–
–
–
–
旋转方向
按照以下顺序直流励磁时,旋转方向从输出侧观察为顺时针方向旋转。
连接器类型针No.
(3)
(5)
(1.6)
(4)
励
磁
顺
序
+
1
+
2
+
3
+
4
–
–
–
–
(2)
–
–
–
–
驱动器内置
成套件型号
步进电机
引线类型
●
双极连线
(1)
(2)
ӣ
ઢ
ઢ
内部连线
ࢤࣜ
内部连线
( ) 连接器针No.
ࢤ
(3)
ࣜ
(4)
旋转方向
按照以下顺序直流励磁时,旋转方向从输出侧观察为顺时针方向旋转。
引线线色
白黑
红
蓝
励
磁
顺
序
+
1
+
2
+
3
+
4
–
–
–黄–
–橙–
–
–
旋转方向
按照以下顺序直流励磁时,旋转方向从输出侧观察为顺时针方向旋转。
引线颜色 · 连接器类型针No.
蓝
黄
橙
+
+
–
+
–
–
+
–
(4)
(1)
励
磁
顺
序
连接器
引线
1
2
3
4
103H782□
红
–
–
–
+
+
+
+
–
(2)
(3)
外形图
步进电机用
I
C
48

外形图
电机
□
28mm
Ġ1
10
A
0.013
5-0.013
单极
□
35mm
0
5-0.013
单极
Ġ0.8 20Ġ0.5
L
2
.013
0
5-0.013
.05
0
22-0.05
ŕ28Ġ0.5
4-23Ġ0.25
1ĄĄĄ6
B
18ᅜူ
ኍNo.
4-M2.6ġ0.45
அᆶၳศ܈3.2ᅜฉ
6.5ᅜူ
引线类型连接器类型
成套件型号 电机型号 电机长度 (L)
DU14H321
△
103H3205-52△031
DU14H326△103H3215-52△050.3
- 103H3205-50△031
- 103H3205-51△031
- 103H3215-51△050.3
- 103H3215-52△050.3
- 103H3205-50 △ 031 连接器类型
- 103H3205-51 △ 031 连接器类型
- 103H3215-51 △ 050.3 连接器类型
- 103H3215-52 △ 050.3 连接器类型
ᆅ၍ : UL1007 CSA,AWG26
Ġ1
15
9ᅜူ
ᅜฉ
300)
Ġ0.5
Ġ1
20
L
21
ᅜฉ
2Ġ0.25
0
5-0.013
0
22-0.05
4-M3ġ 0.5
அศ܈4ᅜฉ
0
(ৈ
35.6ۨጱև)
引线类型
成套件型号 电机型号 电机长度 (L)
- SH3533-12U △ 033
- SH3537-12U △ 037
- SH3552-12U △ 052
A
B
16 以下
电缆末端处理
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
电缆末端处理
引线类型
引线类型
引线类型
□
28mm
ᆅ၍ : UL1007 CSA, AWG26
10Ġ1
6.5ᅜူ
0
5-0.013
2.5 以下
LĠ0.8
23ᅜฉ
N.P
20Ġ0.5
2Ġ0.76
R3ᅜฉ
+1
15
ø5-0.013
A
அᆶၳศ܈3.2ᅜฉ
0
ø22-0.05
4-M2.6!y!0.45
0
28Ġ0.5
23Ġ0.25
16ᅜူ
2.5ᅜူ28Ġ0.5
23Ġ0.25
4.5Ġ0.15
引线类型
成套件型号 电机型号 电机长度 (L)
DB14H321
△
103H3205-57△031
DB14H326△103H3215-57△050.3
- 103H3205-55△031
双极
- 103H3205-56△031
- 103H3205-57△031
- 103H3215-55△050.3
- 103H3215-56△050.3
- 103H3215-57△050.3
□
42mm
ŕ
35
Ġ
05
29
Ġ!
0.25
26
Ġ
0.25
22
ᅜူ
5ᅜူ
Ġ0.25
26Ġ0.25
29
0.013
5-0.013
15
Ġ1
L
Ġ0.5 24Ġ0.5
1.5
.05
0
22-0.05
.013
0
5-0.013
电缆末端处理
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
ŕ42Ġ0.25
4-31Ġ0.25
27ᅜူ
ኍNo.
1ĄĄ6
4-M3ġ0.5
அᆶၳศ܈4ᅜฉ
7ᅜူ
连接器类型
单极
成套件型号 电机型号 电机长度 (L)
DU15H521 △ 103H5205-04 △ 033
DU15H522 △ 103H5208-04 △ 039 连接器类型
DU15H524 △ 103H5210-04 △ 048 连接器类型
电缆末端处理
连接器类型
- 103H5209-04 △ 041 连接器类型
49
□
42mm
双极
4.5Ġ0.15
42Ġ0.25
31Ġ0.25
18ᅜူ
ᆅ၍ : UL1430 CSA, AWG26
24Ġ0.5
LĠ0.5
+1
24ᅜฉ
6ᅜူ
15Ġ1
0
ø5-0.013
1.5Ġ0.76
15
NOTE3
R3ᅜฉ
4-M3 y 0.5
0
அᆶၳศ܈4ᅜฉ
5-0.013
ø
0
-0.05
22
A
ø
引线类型
成套件型号 电机型号 电机长度 (L)
DB14H521 △ 103H5205-52 △ 033
DB14H522 △ 103H5208-52 △ 039
DB14H524 △ 103H5210-52 △ 048
- 103H5205-50 △ 033
- 103H5205-51 △ 033
- 103H5208-50 △ 039
- 103H5208-51 △ 039
- 103H5209-50 △ 041
- 103H5209-51 △ 041
- 103H5209-52 △ 041
- 103H5210-50 △ 048
- 103H5210-51 △ 048
5ᅜူ
31Ġ0.25
42Ġ0.25
电缆末端处理
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
□
42mm
ᆅ၍ǖ
UL3385 AWG24
24Ġ0.5LĠ0.515Ġ1
1.5Ġ0.76
300ᅜฉ
0
-0.013
5
S
4.5Ġ0.15
௬S-S
S
成套件型号 电机型号 电机长度 (L)
DU15S141 △ SH1421-04 △ 133
单极
DU15S142 △ SH1422-04 △ 139
DU15S144 △ SH1424-04 △ 148
DB16H141 △ SH1421-52 △ 133
双极
DB16H142 △ SH1422-52 △ 139
DB16H144 △ SH1424-52 △ 148
△
: 电机轴规格型号表
电机轴规格 成套件型号 电机型号
单轴 S7
双轴 D3
42Ġ0.25
4-M3×0.5
+
1
15 0
0
5-0.013
R3ᅜฉ!
4-31Ġ0.25
0
22-0.05
4.5Ġ0.15
引线类型
电缆末端处理
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
△ : 电机轴规格型号表
电机轴规格 成套件型号 电机型号
单轴 S4
双轴 D1

□
50mm
单极
双极
□
56mm
单极
□
60mm
单极
双极
15.5Ġ1
0.000
6.35-0.013
成套件型号 电机型号
- 103H6701-01 △ 039.8
- 103H6701-04 △ 039.8
- 103H6701-07 △ 039.8
- 103H6703-01 △ 051.3
- 103H6703-04 △ 051.3
- 103H6703-07 △ 051.3
- 103H6704-01 △ 055.8
- 103H6704-04 △ 055.8
- 103H6704-07 △ 055.8
DB16H671△103H6701-50 △ 039.8
DB16H672△103H6703-50 △ 051.3
- 103H6704-50 △ 055.8
6.35 0 -0.013
15.5
Ġ1
ᆅ၍ UL3266 AWG22
LĠ0.8
1.5
305ᅜฉ
5
ᆅ၍ : UL1430 CSA, AWG22
Ġ0.25
5
1.5
Ġ0.25
R.P
L
Ġ0.8
20.6Ġ0.5
B
20.6Ġ0.5
.000
0
0
.000
0
6.35-0.013
6.35-0.013
A
ŕ50Ġ0.5
4-41Ġ0.13
25ᅜူ
+0.5
4-4.5ā0.5
电机长度
(L)
6ᅜူ
电缆末端处理
36-0.039
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
+0.5
4-4.5 0
56
Ġ0.5
47.14Ġ0.13
38.1Ġ0.025
11ᅜူ
Ġ0.13
Ġ0.5
56
47.14
引线类型
成套件型号 电机型号 电机长度 (L)
- 103H7121-61 △ 041.8
电缆末端处理
引线类型 (CE)
- 103H7121-67 △ 041.8 引线类型 (CE)
- 103H7123-61 △ 053.8 引线类 型 (CE)
- 103H7123-67 △ 053.8
引线类型 (CE)
- 103H7126-61 △ 075.8 引线类 型 (CE)
- 103H7126-67 △ 075.8 引线类 型 (CE)
15.5Ġ1 LĠ0.8 20.6Ġ0.5
+1
15+0
(ᆶၳ܈)
S
S
0.000
R4ᅜฉ
8-0.015
连接器类型
R4ᅜฉ
7
1.5
+1
15+0
(ᆶၳ܈)
S
S
0.000
8-0.015
成套件型号 电机型号 电机长度 (L)
- 103H7821-01 △ 044.8
ŕ60Ġ0.5
0.13
4-50Ġ
33ᅜူ
ኍNo.
1ĄĄĄ6
12ᅜူ
.000
0
36-0.039
4-4.5+0.0
+0.5
电缆末端处理
连接器类型
- 103H7821-04 △ 044.8 连接器类型
- 103H7821-07 △ 044.8 连接器类型
- 103H7822-01 △ 053.8 连接器类型
- 103H7822-04 △ 053.8 连接器类型
- 103H7822-07 △ 053.8 连接器类型
- 103H7823-01 △ 085.8 连接器类型
- 103H7823-04 △ 085.8 连接器类型
- 103H7823-07 △ 085.8 连接器类型
DB16H781△ 103H7821-57 △ 044.8
连接器类型
DB16H782 △ 103H7822-57 △ 053.8 连接器类型
DB16H783 △ 103H7823-57 △ 085.8 连接器类型
- 103H7821-17 △ 044.8 连接器类型
- 103H7822-17 △ 053.8 连接器类型
- 103H7823-17 △ 085.8 连接器类型
△
: 电机轴规格型号表
电机轴规格 成套件型号 电机型号
单轴 S7
双轴 D3
△ : 电机轴规格型号表
电机轴规格 成套件型号 电机型号
单轴 S4
双轴 D1
□
56mm
单极
□
56mm
双极
□
60mm
单极
双极
6.35-0.013
305ᅜฉ
ᆅ၍ UL1430 AWG22
LĠ0.8
20.6Ġ0.5
5
1.5
0.000
6.35-0.013
ŕ56Ġ0.5
4-47.14Ġ0.13
26ᅜူ
38.1Ġ0.025
+0.5
4-4.5ā0.0
15.5Ġ1
0.000
引线类型引线类型
成套件型号 电机型号 电机长度 (L)
DU16H711 △ 103H7121-04 △ 041.8
DU16H713 △ 103H7123-04 △ 053.8
DU16H716 △ 103H7126-04 △ 075.8
- 103H7121-01 △ 041.8
- 103H7121-07 △ 041.8
- 103H7123-01 △ 053.8
- 103H7123-07 △ 053.8
- 103H7124-01 △ 063.8
- 103H7124-04 △ 063.8
- 103H7124-07 △ 063.8
- 103H7126-01 △ 075.8
- 103H7126-07 △ 075.8
ᆅ၍ : UL1430 CSA, AWG22
15.5Ġ1
8ᅜူ
+1
15
0
ø6.35-0.013
56Ġ0.5
R4ᅜฉ
LĠ0.8
5Ġ0.25
32.2ᅜฉ
20.6Ġ0.5
1.5Ġ0.25
B
+1
15
R.4ᅜฉ
NOTE3
0
6.35-0.013
A
38Ġ0.025
引线类型
成套件型号 电机型号 电机长度 (L)
DB16H711 △ 103H7121-57 △ 041.8
DB16H713 △ 103H7123-57 △ 053.8
DB16H716 △ 103H7126-57 △ 075.8
- 103H7121-56 △ 041.8
- 103H7121-58 △ 041.8
- 103H7123-56 △ 053.8
- 103H7123-58 △ 053.8
- 103H7126-56 △ 075.8
- 103H7126-58 △ 075.8
- 103H7128-56 △ 094.8
- 103H7128-57 △ 094.8
- 103H7128-58 △ 094.8
LĠ0.8
7Ġ0.25
1.5Ġ0.25
N.P
20.6Ġ0.5
B
NOTE3
-0.013
0
6.35
38.1Ġ0.025
A
15.5Ġ1
D1
60±0.5
引线类型
成套件型号 电机型号 电机长度 (L)
- SH1601-04 △ 044.8
- SH1602-04 △ 053.8
- SH1603-04 △ 085.8
DB16S161 △ SH1601-52 △ 044.8
DB16S162 △ SH1602-52 △ 053.8
DB16S163 △ SH1603-52 △ 085.8
型号 轴径 D 切割厚度
103H7121- □□□□
φ
6.35 5.8103H7123- □□□□
103H7126- □□□□
103H7128- □□□□
φ
87.5
型号 轴径 D 切割厚度
SH1601- □□□□
SH1602- □□□□
SH1603- □□□□
φ
6.35 5.8
φ
87.5
8ᅜူ
电缆末端处理
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
56Ġ0.5
47.14Ġ0.13
26ᅜူ
5.8Ġ0.15
电缆末端处理
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
60Ġ0.5
47.14Ġ0.13
电缆末端处理
引线类型
引线类型
引线类型
引线类型
引线类型
引线类型
驱动器内置
成套件型号
+0.5
4.5
4-
8ᅜူ
56Ġ0.5
47.14Ġ0.13
步进电机
外形图
60Ġ0.5
47.14Ġ0.13
+0.5
4-
4.5 0
步进电机用
I
C
50

外形图
电机
□
86mm
41Ġ2
A
+1
! (ᆶၳ܈)
0
25
0
-0.018
14
S
S
R4ᅜฉ R4ᅜฉ
单极
双极
ᆅ၍
UL3266 CSA AWG22
LĠ1
1.5Ġ0.25
30
Ġ0.5
8Ġ0.5
থں܋ጱ
M4×0.7×6L
S
S
25
+1
! (ᆶၳ܈)
0
0
-0.018
13Ġ0.15
14
90°
73.025Ġ0.025
௬S-S
13±0.15
305ᅜฉ
85.5
Ġ0.5
69.6Ġ0.25
27ᅜူ
B
4-
引线类型
成套件型号 电机型号 电机长度 (L)
5.6Ġ0.2
A (CE)
B (CE)
Ġ0.5
85.5
69.6Ġ0.25
CE 类型
电缆末端处理
- SH2861-04 △166 引线类型
- SH2862-04 △196.5 引线类型
- SH2863-04 △ 1127 引线类型
- SM2861-50 ◇166 引线类 型 (CE)
- SM2861-51◇ 166 引线类 型 (CE)
- SM2861-52 ◇ 166 引线类型 (CE)
- SM2862-50 ◇ 196.5 引线类 型 (CE)
- SM2862-51 ◇ 196.5 引线 类型 (CE)
- SM2862-52 ◇196.5 引线类 型 (CE)
- SM2863-50 ◇ 1127 引线 类型 (CE)
- SM2863-51 ◇ 1127 引线类型 (CE)
- SM2863-52 ◇ 1127 引线类 型 (CE)
φ
86mm
Ġ20
305ᅜฉ
250
86Ġ0.5
.000
0
双极
9.5-0.013
থں܋ጱ
M4×0.7×6L
ᆅ၍ UL1430 AWG18ULᅚဗ࠶
(25)
Ġ0.5LĠ0.828Ġ1
30
1.52
4.83
27.5
S
S
.000
0
±0.5
12-0.018
73.025Ġ0.025
ŕ82.55Ġ0.5
4-69.6Ġ0.2
4-5.35+0.0
+0.5
引线类型
成套件型号 电机型号 电机长度 (L)
- 103 H8221-62 △ 062 引线类型 (CE)
- 103H8222-63 △092.2 引线类型 (CE)
- 103 H8223 -63 △ 0125.9 引线类 型 (CE)
电缆末端处理
φ
106mm
28Ġ1 LĠ1 35Ġ0.5
305ᅜฉ
A
106.4Ġ1
0.000
12.7 -0.018
ᆅ၍ UL1430 AWG18
引线类型 CE 类型
成套件型号 电机型号 电机长度 (L)
单极
- 103 H8922 2-09 △ 1 163.3 引线类型
- 103 H89223- 09 △1221.3 引线类型
- 103 H8922 2-52 △ 1 163.3 引线类型
双极
- 103 H89223- 52 △ 1221.3 引线类型
- 103 H8922 2-63 △ 1 163.3 引线 类型 (CE)
- 103 H89223- 63 △1221.3 引线类型 (CE)
1.52
8.6
+1
30.5 0
ŕ106.4Ġ0.5
4-88.9Ġ0.25
A (CE)
B
S
S
0.000
16-0.018
55.524Ġ0.05
+0.5
4-6.9 0.0
B (CE)
电缆末端处理
△ : 电机轴规格型号表
电机轴规格 成套件型号 电机型号
单轴 S4
双轴 D1
◇ : 电机轴规格型号表
电机轴规格 成套件型号 电机型号
单轴 S5
双轴 D2
51

外形图
驱动器 (CE [TÜV] · UL)
■
关于安全规格
驱动器
UL
CE
(TÜV)
取得规格 文件 No. 适合规格
UL
销往加拿大 UL
指令区分 区分 名称 规格
低电压指 令 - - EN50178
EMC 指令
辐射
抗扰性
29
1
POW
CN2
RUN
8
9
7
A
6
B
5
C
4
D
3
E
2
F
1
56
25
5
2
5
0
F1
CN1
CN3
111
54
64
E1797 75 UL508C
传导辐射 EN55011-A
电磁放射辐射 EN55011-A
静电放电抗扰度 EN61000 -4-2
辐射电磁场抗扰度 EN61000-4-3
电快速瞬变 / 脉冲群
抗扰度 EN61000-4-4
注入电流抗扰度 EN61000-4-6
波涌抗扰度 EN61000-4-5
电压暂降和短时中断抗扰度 EN61000-4-11
驱动器内置
2-3.5
ON
12 873456
E×1
E×2
E×3
F / R
ACD1
ACD2
LV
EORG
ALM
成套件型号
步进电机
SM系列马达 (UL/CE对应),H 系列马达 (CE对应)
取得规格 文件No.
UL
UL
销往加拿大UL
适应规格 规格
CE
低电压指 令
● 但是,EMC随着装有驱动器和步进电机的客户控制柜的结构,
以及其它电气设备与配置、配线的关系而发生变化,
有时需使用干扰滤波器、电感线圈等的EMC对策部件。
● F系列驱动器在 第三方机构TÜV ( TÜV 产品服 务) 实施低电压指令和EMC指令的确认试验,并自我宣言CE标志。
E208878
EN-60034-1
IEC34-5
(EN-60034-5)
外形图
步进电机用
I
C
52

步进电机用 IC
规格
2相步进电机驱动通用控制器用IC
PMM8713PT
■
特点
· 通用控制器 : 根据励磁模式切换端子,可选择以下3种励磁模式。
1EX / 1-2EX / 2EX
· 电源电压 : Vcc = 4.5~5.5V
· 高输出电流 : 24mA min (散热片,源)
· 高杂波范围 : 所有的输入端子中内置有施密特电路。
· 2 种脉冲输入 : 2 输入方式 (CW,CCW输入模式)
1 输入方式 (CK,U/ D输入模式)
· 励磁状态判别显示器 : 将控制器状态作为监视信号输出。
■
最大额定
项目 记号 额定 单位
电源电压 V
输出电流 "H"级别 IOH
φ
n"L"级别 IOL
输出电流 "H"级别 IOH
C
O,EM
输入电压 V
输入电流 I
动作温度 T
保存温度 T
■
外形图
针No. 名称 功能
1. C
2. CD输入脉冲DOWN时钟输入
3. C
4. U/D 旋转方向变换
5. EA励磁模式切换输入
6. E
7.
8. V
9. R 复位 输入
10.
11.
12.
13.
14. EM励磁监视输出
15. C
16. V
(Ta=25℃)
"L"级别 IOL
(单位: mm)
输入脉冲UP时钟输入
U
输入脉冲时钟输入
K
励磁模式切换输入
B
φ
励磁模式切换输入
C
GND
SS
φ4φ
φ3φ
φ2φ
φ1φ
输入脉冲监视输出
O
4.5~5.5V
CC
4输出
3输出
2输出
1输出
-
CC
φ
φ
IN
IN
opr
stg
0.3~7V
-
35
35
-
+
0.3~V
0.3 V
CC
±10 mA
-
20~85 ℃
-
40~125 ℃
1.53TYP
mA
μA
19.75MAX.
19.25
2.54TYP
Ġ0.2
■
推荐动作条件
项目 记号
电源电压 V
输出电流 "H"级别 IOH
φ
n"L"级别 IOL
输出电流 "H"级别 I
CO,EM"L"级别 I
输入电压 V
6.6
6.2
4.45MAX.
0.4
0.6
2.9MIN.
0.51MIN.
(Ta=-20~85℃)
CC
φ
φ
OH
OL
IN
7.62TYP
0ċ15
0.20
0.35
额定
最小 标准 最大
4.5 - 5.5 V
-
24 --mA
24 --
-
2 --mA
2 -0 - VCC V
°
单位
53

■
电气特性
直流特性(Ta =- 20 ~ 85℃)
项目 记号
输入电压 "H" 级别 V
"L" 级别 V
"H" 级别 VOH5
输出电压
"L" 级别 V
, E
M
"H" 级别 I
"L" 级别 I
"H" 级别 IOH5
"L" 级别 I
输出电流
φ
1 ~φ4
输出电流
C
O
输入电流 I5 --10 -
静止消耗电流 I
条件 规格值
VCC[V] 最小 标准 最大
5 - 3.5 --V
IH
5 ---1.5
IL
OL
OH
OL
OL
CC
V
=5V VL=0V
H
IO
=0
H
V
=5V VL=0V
5
5
5
5
5V
H
I
=0
OH
V
=5V VL=0V
H
V
=2.4V
OUT
V
=5V VL=0V
H
V
=0.4V
OUT
V
=5V VL=0V
H
=2.4V
V
OUT
V
=5V VL=0V
H
V
=0.4V
OUT
=5V VL=0V - 1 - mA
H
4.9 --V
--0.1
-
24 --mA
24 --
-
2 --mA
2 --
开关时间测定波形
单位
μ
开关特性 (Ta =- 20 ~ 85℃)
项目 记号 条件 规格值
最大时钟频率 f
最小时钟脉冲宽度
最小重置脉冲宽度 t
延迟时间 ( 从时钟输
入起
φ
输出 )
设定时间 t
保持时间 t
A
VCC[V]a 最小 标准 最大
MAX
t
,
WL
t
WH
WR
t
pd
SET
HOLD
5
5
5
5
5
CL = 50pF
tr = tf = 20ns,
CL = 50pF
tr = tf = 20ns,
CL = 50pF
tr = tf = 20ns,
CL = 50pF
tr = tf = 20ns,
CL = 50pF
tr = tf = 20ns,
CL = 50pF
tr = tf = 20ns,
5
1 --MHZ
--500 ns
--1000 ns
--2000 ns
0 --ns
250 --ns
单位
驱动器内置
成套件型号
■
功能表
输入方式和旋转方向
输入方式
2 输入方式 (CW,CCW)
1 输入方式 (CK,U/D)
输入 旋转方向
CU CD CK U/D
LLLCW
L LLCCW
LL HCW
LL LCCW
励磁方式
励磁方式
1 EX H H L H
1-2EX HHHH
2 EX H L L H
输入
REAEB
φ
C
步进电机
外形图
I
C
54
步进电机用

步进电机用IC
规格
2相步进电机驱动通用控制器用IC
PMM8713PT
■
励磁顺序
1EX
脉冲
0 ( 复位 )1234
相
φ
1 1 0001
φ
2 0 1000
φ
3 0 0100
φ
4 0 0010
E
0 0000
M
UP
DOWN
■
输入脉冲监视器
■
应用电路示例
(双极连线电机)
与电源混合IC组装
2EX
脉冲
0 ( 复位 )1234
相
φ
1 1 1001
φ
2 0 1100
φ
3 0 0110
φ
4 1 0011
E
1 1111
M
UP
DOWN
CU
CD
CK
CO
24V
P.GND
1-2EX
脉冲
0 ( 复位 )12345678
相
φ
1 1 11000001
φ
2 0 01110000
φ3 0 00011100
φ
4 1 00000111
E
1 01010101
M
UP
DOWN
· 切换励磁模式时,请复位。
+
5V
ൻۯ
ىఇ๕ยۨ
ް࿋
+
GND
5V
1
2
3
4
5
6
7
9
PMM8713PT
GND
816
14
15
13
12
11
10
ྔև
5V
GND
13
91115198
4
25
3
24
6
22
21
PMM2101
72126
GND
励磁模式设定
针 No. 端子记号 输入级别 电机动作
5,6 E
, E
A
B
H 1-2EX
L 2EX
● 接通电源时的VCC在不稳定的状态下,有时无法正常进行初始化重置动作。
为了能 够切 实 进行重置,R端子 (9针)保持 "L"级别,直至确立VCC。
(16ኍ)
Vcc
4.5V
R ( 9ኍ)
ᅜူ
1.5V
CV
20
10
12
14
18
5
23
GND
5V
օۉ
● 电源混合IC: PMM2101规格请参照P56。
● 其他应用电路示例请参阅PMM8713PT的操作说明书。
55

步进电机用IC
规格
2相步进电机用HIC
PMM2101
全步/半步
双极类型
■
特点
· 采用双极恒电流切换方式,可实现高速旋转和高转矩化。
· 外装部件少,可构成紧凑的驱动电路。
· 内置有加热保护电路,设计安全。
■
最大额定
项目 记号 额定值 单位
电源电压 -1 V
电源电压 -2 V
输出电流 I
容许损失 P
热电阻
接合部温度 T
保存温度范围 T
(Tc=25℃)
CC1
CC2
O
T
θ
jc
θ
ja
jmax
stg
8 ~ 60 V
0 ~7V
1.4 A
35 (Tc = 25℃ )W
3.57 ℃ /W
25 ℃ /W
150 ℃
-
40 ~150 ℃
■
推荐动作条件
项目 记号 额定值 单位
电源电压 -1 V
电源电压 -2 V
输出电流 I
振荡频率 F
动作温度范围 T
CC1
CC2
O
C
C
(Tc=25℃)
10 ~ 50 V
4.75 ~5.25 V
1.0 A
20 ~27 kHz
-
25 ~85 ℃
驱动器内置
成套件型号
步进电机
■
外形图
项目 记号 额定值
1. V
2. ENA A 允许输入端子
3.
4.
5. CR A 单稳时间常数设定端子
6. V
7. LG A GN D
8. V
9. V
10. M1 电机输出
11. R
12. M2 电机输出
13. PG P.GND
14. M3 电机输出
15. R
16. NC -
17. NC -
18. M4 电机输出
19. V
20. V
21. LG B GND
22. V
23. CR B 单稳时间常数设定端子
24.
25.
26. ENA B 允许端子
27. AL 过热报警输出端子
(单位: mm)
CC2
φ
1 臂驱动输入
φ
2 臂驱动输入
ref
CC1
A 电机电流检测端子
S
S
S
B 电机电流检测端子
S
CC1
ref
φ
3 臂驱动输入
φ
4 臂驱动输入
控制部用电源端子
A 电机电流设定端子
A 电机驱动用电源端子
A 检测电阻连接端子
B 检测电阻连接端子
B 电机驱动用电源端子
B 电机电流设定端子
࠶Պࡽ
಼ଉࡽ
动作真值表
ENA A (ENA B)φ1(φ3)
LLLOFFOFF
LLHLH
LHLHL
L HHOFFOFF
H --OFF OFF
φ
2 (φ4) M1 (M3) M2 (M4)
外形图
步进电机用
I
C
56

步进电机用IC
规格
2相步进电机用HIC
PMM2101 全步/半步
■
电气特性
(Ta=25)
项目 记号 条件
"H" 级别输入电压 V
"L" 级别输入电压 V
"H" 级别输入电流 I
"L" 级别输入电流 I
标准电压 (Vref) 输入电流 I
电流检测 (VS) 输入电流 I
FET 二极管正向电压 V
上侧输出饱和电压 V
下侧输出饱和电压 V
输出漏电流 I
控制部电源电 流 I
报警端子电流 I
IH
IL
IH
IL
ref
S
F
ce (sat)H
ce (sat)L
R
CC2
alm
V
V
V
V
V
V
IF= 1A - 1.3 1.5 V
IC= 1A - 1.0 1.4 V
IC= 1A - 1.0 1.3 V
V
V
V
V
= 5V 2.7 - V
CC2
= 5V 0 - 1.0 V
CC2
= 5V,VI= 5V --10
CC2
= 5V,VI= 0V ---50
CC2
= 5V,V
CC2
CC2
= 60V,V
CC1
OUT
CC2
CC2
= 0V ---10
ref
= 5V,VS= 0V ---10
= 0V --10
OUT
= 60V,VRS= 0V --10
= 5V(电路动作时) - - 75 mA
= 5V,V
= 0.5V --2mA
alm
额定
最小 标准 最大
CC2
单位
V
μ
μ
μ
μ
μ
μ
A
A
A
A
A
A
过热报警动作温度 - - - 125 -℃
过热保护停止动作温度 - - - 15 0 -℃
■
过热报警输出
过热保护电路在IC内部的接合 部温度为+12 5℃时报警输出,达到+15 0℃时动 作 (电机励磁OFF)。
V
(+5V)
CC2
ྔևฉઙۉፆ
(10kˮፑᆸ)
ኍ
27
ୟۉ
PMM2101
● 报警时内部晶体管ON
Vce (ON) : 0.5V以下
Ialm : 2mA以下
● 报警信号输出及过热保护电路通过温度下降而自动复位。
■
应用电路示例
24V
P.GND
5V
ൻۯ
ىఇ๕ยۨ
ް࿋
+
GND
5V
1
2
3
4
5
6
7
9
PMM8713PT
GND
816
14
15
13
12
11
10
R5
R6
C1
13 20
ྔև
5V
GND
● PMM8713PT规格请参照P53。
● PMM2101推荐电路常数
适用 常数 适用 常数
R1,R2 5W 0.68Ω C1, C2 1000pF
R3,R4 1/4W 3.9kΩ C3, C4 3300pF
R7,R8 1/4W 15kΩ C5 330
● R5、R6常数请参照Vref-输出电流特性进行选择。
● D1~D4 的选定
先头逆电压≥ 100V
输出电流≥ 1A
逆恢复时间≤ 100ns
+
C5
R2R1
C2
R3 R4
91115198
4
25
3
24
6
22
26
21
PMM2101
μ
F
10
12
14
18
5
23
721
5V
GND
1.2
1.0
0.8
0.6
0.4
ۉୁ (A)
0.2
0.0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
R7
C3
R8
C4
GND
V
ref
Vref ۉუ (V)
㨪D4
D1
-ۉୁ༬Ⴀ
ઢ
ࢤ
ࣜ
օۉ
57

步进电机用IC
规格
2相步进电机用HIC
PMM2301
细分
单极类型
■
特点
· 细分正弦波驱动的驱动器。
· 内置电流检测电阻。
· 电源驱动电路采用MOSFET来减少发热。
· 一体化组装,可减少周围电路的零部件点数。
· 根据外部发出的位信号,可选择5种励磁模式。
■
最大额定
项目 记号 条件 额定值 单位
电源电压 -1 V
电源电压 -2 V
输入电压 V
相电流 I
动作时电路板温度
接合部温度 T
保存温度 T
(Ta=25℃)
CC1 MAX.
CC2 MAX.
in MAX.
OH MAX.
T
C MAX.
j MAX.
stg
V
= 0V 52 V
CC2
无信号时 7V
逻辑输入端子 7V
施加 0.5sec,1pul se,V
- 105 ℃
- 150 ℃
-
时 4A
CC1
-
40 ~125 ℃
■
推荐动作条件
项目 记号 条件 额定值 单位
电源电压 1V
电源电压 -2V
输入电压 V
相电流 I
时钟频率 Clock
相驱动器耐压 V
(Tc=25℃)
CC1
CC2
IH
OH
DSS
有信号时
有信号时 5.0±5% V
- 0 ~ V
Duty 50% 3A
- DC ~ 50
-
~ 45
10
CC2
100 V
V
V
kHz
驱动器内置
成套件型号
步进电机
■
外形图
针 No. 端子名称
1. B
2. B
3. P.GND A
4. P.GND B
5. A
6. A
7. V
8. V
9. Mode 1
10. Mode 2
11. Mode 3
■
各端子功能
端子名称 功能 启用功能时的条件
V
ref
Clock 电机驱动用脉冲输入
CW / CCW 电机旋转方向设定输入
Reset 系统复位 Reset = "L"
Return 相原点强制复位 Return = "H", 强制移动至当前的励磁相 原点
Enable PowerOFF 输入 Enable = "L"
M
0I
M
01,M02
(单位: mm)
CC2
ref
针 No. 端子名称
12. V
13. V
14. Clock
15. CW / CCW
16. Reset
17. Return
18. En able
19. M
20. M
21. M
22. GND
电机电流设定输入 -
相原点监视输出 相原点时 "L" 级别输出
相励磁状 态监视输出 通过级 别信号输出当前的相 励磁输出的状 态
CC2
CC2
0I
01
02
Mode 3 = "H" 级别 : 上升边缘动作
Mode 3 = "L" 级别 : 上升、下降边缘动作
"H" 级别= CW 旋转
"L" 级别= CCW 旋转
相坐标 A 相 B 相 A 相 B 相
M01 H L L H
M02 L H L H
外形图
步进电机用
I
C
58

步进电机用IC
规格
2相步进电机用HIC
PMM2301 细分
■
励磁模式表
输入条件
Mode1 Mode2 Mode3
励磁模式 1步进角 (度) 基本步进分割数
LLH2EX 1.8 1/1
HL H1-2EX 0.9 1/2
LHHW1-2EX0.45 1/4
HHH2W1-2EX0.225 1/8
HHL 4W1-2EX0.1125 1/16
● Mode3=L时,每个时钟脉冲的上升、下降边缘,动作1个脉冲。
由此,驱动脉冲的占空比50%如有大的偏差,则动作变得不稳定。
■
电气特性
(Tc=25℃,V
项目 记号 条件
电源电流 I
V
CC2
实效输出电流 I
FET 二极管正向电压 V
输出饱和电压 V
"H" 级别输入电压 V
"L" 级别输入电压 V
输入电流 I
V
输入电压 V
ref
V
输入电压 I
ref
"H" 级别输出电压
M
0I,M01,M02
"L" 级别输出电压
M
0I,M01,M02
PWM 频率 F
CC1
CCO
oave
IL
r
V
V
CC2
=24V,V
=5V)
Enable = "L" - 4.5 15 mA
各相 R / L = 3.5Ω / 3.8mH V
If= 1A - 1.2 1.8 V
df
RL = 7.5 Ω(I ≒ 3.0A)-1.4 2.6 V
sat
9 ~11,14 ~ 18 针 4.0 --V
IH
9 ~11,14 ~ 18 针--1.0 V
IL
= 0.6V 0.45 0.50 0.55 A
ref
9 ~11, 14 ~ 18 针= GND 级别 上拉电阻 20kΩ 125 250 510
8 针 0 - V
r
8 针 - 1 -
19 ~ 21 针 I =-3mA 2.4 --V
OH
19 ~ 21 针 I = 3mA --0.4 V
OL
- 37 47 57 kHz
C
额定
最小 标准 最大
CC2
/ 2 V
单位
μ
μ
A
A
■
应用电路示例
推荐电路部常数
C1 C2
100
μ
F 以上 10μF
ىఇ๕ยۨ
Clock
CW
/ CCW
Reset
Return
Enable
(5V)
V
CC2
C2
+
R1
R2
7
12
13
9
10
11
14
15
16
17
18
V
ref
PMM2301
822
GND
V
CC1
10
19
20
21
6
5
2
1
3
4
ྔև
ઢ
ࢤ
ࣜ
օۉ
ċ45V
ӣ
+
C1
P.GND
● R1,R2 常数请参照以下公式,决定Vref 电压。
Vref (V) = 电机电流调整值 (A / 相) ×0.6
59

安全注意事项
驱动器以及步进电机提供给一般产业机械使用。
请您充分留意以下几点 :
· 在安装、组装及使用前,请您务必仔细阅读《操作说明书》,然后正确加以使用。
· 请勿进行产品的改造和加工。
· 安装及保养施工时,请您与购买本装置的销售店或专业人员洽谈。
· 以下使 用情况下,需特别考虑系统的多重化、应急发电设备的设置等的运用、维护和管理工作。请您与本公司洽谈。
1 用于关乎人命的医疗器械等。
1 用于关乎人命的医疗器械等。
2 用于可能会造成人员损伤的列车、电梯等。
2 用于可能会造成人员损伤的列车、电梯等。
3 用于对社会、公共带来重大影响的计算机系统等。
3 用于对社会、公共带来重大影响的计算机系统等。
4 其他用于关乎人的安全、对于维护公共设备、装置的功能产生重大影响的装置等。
4 其他用于关乎人的安全、对于维护公共设备、装置的功能产生重大影响的装置等。
如需在车载、搬运等振动的环境下使用,请您与本公司洽谈。
在使用 (安装、运转、点检、保养等) 本装置之前,请您务必熟读操作说明书,正确加以使用。
请您在熟悉了设备知识、安全信息以及所有的注意事项之后,使用本装置。
在阅读了操作说明书之后,请妥善保管在可看见的地方,以便于使用人员随时取阅。
关于产品的「警告标 签」标识
警告标签根据驱动器和步进电机的机型,显示如下。
标识粘贴在充电部、用盖板盖住的保护部等的高压部附近,表示该部位有触电的危险。
驱动器和步进电机有接地指示时,粘贴在接地端子的附近,提醒接地施工。
标识粘贴在驱动器和步进电机的使用AC42.4V,DC60V以上的电源的部位,提醒当心触电。
关于“安全注意事项的级别”
有以下4种图标。
如果使用不当,会造成危险,有可能引发死亡或者受重伤的情况。
如果使用不当,会造成危险,有可能引发中度伤害和受轻伤的情况,以及可能发生仅器物受损的情况。
所记载的事项根据具体情况,有可能会导致重大结果。
所记载的事项根据具体情况,有可能会导致重大结果。
以上记载了重要的内容,请务必遵守。
以上记载了重要的内容,请务必遵守。
表示禁止实施。
表示务必实施。
60

< 全体 >
1. 请勿在爆炸性、引火性、腐蚀性环境、水容易泼溅到的场所、
易燃物的旁边等场所使用。否则有引发火灾的危险。
2. 必须由具有专业知识的人员进行搬运、设置、配线、运转、点
检保养作业。否则有人员触电、受伤或引发火灾的危险。
3. 通电状态下请勿进行配线、点检保养等作业。
务必断开电源 5 分钟以上,再进行作业。否则有触电危险。
4. 产品的保护功能不启动时,应立即切断电源,查明原因。不查明
原因而继续运转,会导致产品误动作,从而造成人员受伤、损
坏装置。
5. 步进电机根据负荷的大小,有时会在运转时及停止时丢步。使
用的最大负荷条件下,通过测试运转进行充分的试验,确认能
够切实驱动负荷后,再投入使用。否则有人员受伤或装置破损
等的危险。( 用于上下驱动时,可能会因丢步而导致负荷物掉落。)
6. 切勿用手接触驱动器内部。否则有触电危险。
< 配线 >
7. 步进电机请勿直接与商用电源连接。否则有使用人员触电、受
伤或引发火灾的危险。由驱动器向步进电机供应电源。
8. 电源输入电压务必控制在额定范围内。否则有引发火灾或触电
的危险。
9. 驱动器和步进电机务必接地。否则有触电危险。
10. 请勿损伤电缆,或强行用力,或在电缆上放置重物,或夹住电缆。
否则有触电危险。
11. 请参照连线图或操作说明书与电源电缆连线。否则有发生触电
或火灾的危险。
< 运转 >
12. 运转中,切勿接触步进电机旋转部。否则有受伤的危险。
13. 通电中切勿接近或接触端子部位。否则有触电危险。
14. 通电中,切勿拔出连接器。否则有人员触电或损坏连接器的危险。
< 全体 >
1. 在进行安装、运转、点检保养作业之前,请您务必仔细阅读操
作说明书,并遵照指示实施。否则有人员触电、受伤或引发火
灾的危险。
2. 驱动器和步进电机请勿超出规格值使用。否则有人员触电、受
伤或引发火灾的危险。
3. 请勿将手指或物品塞入产品的开口部。否则有人员触电、受伤
或引发火灾的危险。
4. 请勿使用损伤的驱动器和步进电机。否则有发生受伤、火灾的
危险。
5. 请按指定组装驱动器和步进电机后使用。否则会引发火灾或故
障。
6. 驱动器和步进电机以及外围设备温度上升,请十分小心。否则
有烫伤的危险。
< 开箱 >
7. 请确认上下方向不颠倒,然后再开箱。否则有人员受伤的危险。
8. 请确认现货是否为订购产品。若安装了错误的产品,可能会损
坏产品。
< 配线 >
9. 请勿测定绝缘电阻、绝缘耐压。否则会损坏装置。需进行测试时,
请您与本公司洽谈。
10. 请遵照电气设备技术标准和室内线规定,进行配线施工。
否则有烧坏装置或引发火灾的危险。
11. 请正确并切实配线。否则会导致步进电机失常。否则有受伤的
危险。
12. 附属的电容器、外部电阻的连接端子请进行绝缘处理。
否则有触电危险。
< 安装 >
13. 请勿攀登到装置上方或在装置上压重物。否则有受伤的危险。
14. 请勿堵塞吸排气口或混入异物。否则有引发火灾的危险。
15. 请务必按正确的安装方向安装。否则会引发故障。
16. 与驱动器和控制盘内面或其他设备之间的间隔应遵照操作说明
书,留有适当的距离。否则会引发故障。
17. 安装时若掉落或翻倒会很危险,请十分小心。
18. 请安装在金属等的难燃物上。否则有引发火灾的危险。
19. 与设备结合前,请确认旋转方向。否则有损坏设备的危险。
20. 请勿用手直接碰触电机的输出轴 ( 键槽、切齿部 )。
否则有受伤的危险。
< 运转 >
21. 步进电机不附带保护装置。请用过电流保护装置、漏电断路器、
防过升温装置、紧急停止装置加以保护。
否则有发生受伤或引发火灾的危险。
22. 通电中或电源断开后的一段时间,驱动器和步进电机等的温度升
高,请勿接触。否 则有烫伤的 危险。
特别是根据运转条件,步进电机的温度明显上升。请在电机表
面温度 100℃以下时使用。
23. 发生异常情况下,应立即停止运转。否则有人员触电、受伤或引
发火灾的危险。
24. 切勿进行极端的调整变更,这样做会使动作变得不稳定。否则
有受伤的危险。
25. 测试运转之前,请在固定电机、并与机械系统分离的状态下确
认动作,然后再安装在设备上。否则有受伤的危险。
26. 发生报警时,请查明原因,在确保安全的前提下重新运转。否则
有受伤的危险。
27. 瞬时停电后恢复后,可能会突然重新启动,请勿靠近设备。( 请
将该设备设计成即使重新启动,也能够确保人员的安全。) 否则
有受伤的危险。
28. 请确认电源规格是否正常。否则会引发故障。
29. 带电磁制动器的电机制动机构为可动部及电机位置保持用。请
勿用作安全制动器。否则会损坏装置。
30. 单独运转带键的电机时,请固定键。否则有受伤的危险。
< 保养 >
31. 驱动器和步进电机机壳会有高温,点检保养作业时应小心避免
碰触。否则有烫伤的危险。
32. 驱动器内部的电解电容器在常年平均 40℃的 条件下,使 用寿命
一般为 5 年。
为了进行预防保全,建议以 5 年为标准更换为新品。
另外,保险丝在常年平均 40℃的条件下,使用寿命 一般为 10 年。
我们建议您定期进行更换。
33. 需维修时,请与本公司取得联系。一旦拆卸开来,可能会导致无
法动作。
< 搬运 >
34. 搬运时若掉落或翻倒会很危险,请十分小心。
35. 搬运时,请勿手握电缆或电机轴。否则有引发故障或人员受伤的
危险。
< 废弃 >
36. 在废弃驱动器和步进电机时,请作为一般工业废弃物进行处理。
< 保管 >
1. 请勿保管在容易被雨、水滴溅到的场所,或者有有害气体、液
体的场所。否则会引发故障。
< 保养 >
2. 请勿拆卸维修。否则有引发火灾或人员触电的危险。
< 全体 >
3. 请勿取下铭板。
< 保管 >
1. 请保管在无阳光直射的场所,或者根据各产品的规格在其温湿
度范围内。
2. 长时期保管驱动器 ( 标准为 3 年以上 ) 时,请向本公司咨询。长
时期保管,可能会导致电解电容器的容量下降,从而引发故障。
< 运转 >
3. 请务必在外部设置紧急停止电路,以确保能够即时停止运转,
断开电路。
4. 根据各产品的规格,应在其温湿度范围内运转。
< 搬运 >
5. 产品超载会使货物倒塌,请遵照外箱标识实施。
61

询价确认表
在询问或订购时,请您告知以下事项。
您如有任何问题或要求,请与我们取得联系。
客户公司名称
部门名称
电话
传真
1 : 用途
2 : 机械名称
3 : 台数
电话 +81 3 3917 5157
传真 +81 3 3917 0643
年 月 日
提 问 项 目 内 容
1 对象装置名称 装置,分类 (运输机/加工机/试验机/其他)
2 伺服使用轴名称 轴,轴机构 (水平轴/垂直轴),制动机构 (有/无)
3 上述轴的现状 制造商名称 ( ) 系列名称 ( )
4 定位精度 ± mm · ±
加速度α: G · [ m/s
进给速度 V : [pulse/s]
进给速度
5 动作图
[pulse/sec]
移动距离 D : [pulse]
µ
m
2
] 【参考公式】
【1G=9.8[m/s2]、1[m/s2]≒0.1G】
2
【α[m/s
]=V[m/sec]÷t1[sec]】
【D[m]=V[m/sec]×(t1+t2) [sec]】
( 行程 )
时间[sec]
滚珠丝杠 · 螺丝旋转型 (水平),滚珠丝杠 · 螺母旋转型 (水平),齿条&小齿轮 (水平)
6 机械机构
皮带/链条(水平),旋转台,滚轮进给,不稳定
WT (工作台的重量) kg WL (工件重量) kg WA (其他驱动部重量) kg
WR (齿条重量) kg WB (皮带/链条重量) kg WC (计数器平衡重量) kg
Fa (轴向外力) N Fb (滚珠丝杠预压) N T (滚轮推压力) N
Dr1 (驱动侧滚轮直径) mm Dr2 (从动侧滚轮直径) mm
Lr1 (驱动侧滚轮长度) mm Lr2 (从动侧滚轮长度) mm G (减速比)
2
JG (减速机惯量) kg · m
JN (螺母惯量) kg · m
Db (滚珠丝杠直径) mm Lb (滚珠丝杠轴长) mm Pb (滚珠丝杠引线) mm
7 机械结构
Dp (小齿轮/带轮直径) mm Lp (小齿轮轴长) mm tp (带轮厚度) mm
Dt (工作台直径 ) mm Dh(工作台支承直径)
JC (联轴器惯量) kg · m2
2
JO (其他电机轴换算惯量) kg · m2
mm LW (负荷轴偏移距离) mm
Ds (工作台轴径 ) mm Ls (工作台轴长) mm
3
ρ (滚珠丝杠/小齿轮/带轮/工作台轴材质比重) kg · m
µ
(摩擦面/支承部/滚轮和座面的摩擦系数) p1 (滚轮1材质比重) kg/m
p2 (滚轮2材质比重) kg/m3 k (预压螺母的内部摩擦系数)
η (机械效率) JL (电机轴换算的负荷惯量) kg · m
TF (电机轴换算的摩擦转矩) N · m Tu (电机轴换算的不平衡转矩) N · m
8 减速机 客户采购 [ / ] · 山洋标 准 [行星齿轮 · 平齿 · 无背隙行星齿轮/ ] 其他 [ / ]
传感器 机型指定 (有 · 无)
有~ (增量式、光学式绝对值式、光学式绝对值式 [带增量,解角器绝对值式])
9
传感器类别
分辨率 ( )
0 输入形态 位置 · 速度 · 转矩 · 通信 [SERCOS · CAN · DeviceNet] · 其他 [ ]
A 上位设备 (控制器) 程序装置 · 电脑 · 客户开发产品 · 山洋采购 · 其他 ( )
B 使用环境的要求事项 切削加工 · 在无尘室内使用 · 防尘对策 · 其他 ( )
C 生产台数预测 单发品 · 台/月 · 台/年
D 开发日程表 试制时期 : 年
月,量产时期 : 年 月
E 处置 相关资料 (已交付 · 希望日后邮寄) 希望访问PR (有 · 无) 希望洽谈 (有 · 无)
3
2
其他,特别标记事项
F
(提问事项、遗留事项、需解决的内容等)
62

CATALOG No.865-1’09.05
 Loading...
Loading...