

Page 1
Circuit Description
3. Circuit Description
3-1 Main PBA
3-1-1 Summary
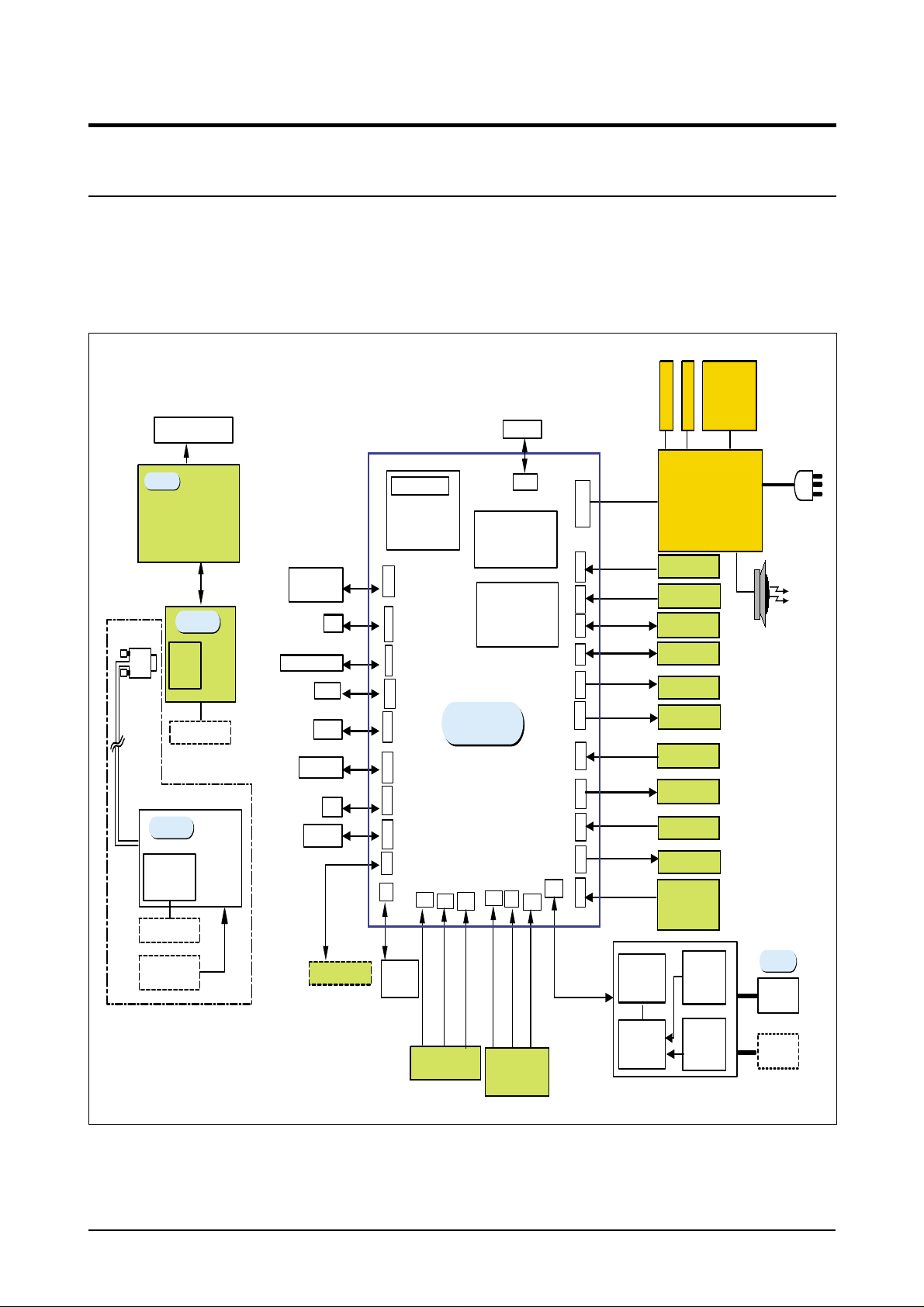
The main circuit that consists of CPU, MFP controller (built-in 32bit RISC processor core: ARM946ES) including various I/O device drivers, system memory, scanner , printer, motor driver, PC I/F, and F AX transceiver controls the whole system. The entire structure of the main circuit is as follows :
M
DEV
SUPPLY
H
V
BLADE
LCD 20x2line
T
H
V
SCAN
OPE
MICOM
- LCD Drive
- Key Scan
5P
Platen
15P D-SUB
D-SUB
CONN.
FLAT MOTOR
Opti o n
ADF
MOTOR
DRIVER
DADF MOTOR
PAPER SENSOR
POS,DET
3P x 2EA
CENTRONICS
CABLE
SCF
OUT BIN F ULL
PCNT
HYPER
DEV CNT
OPC
USB CABLE
22P
CCD MODU LE
CN8
CN2
C
24P
N
6
Flash DIMM
NetworkCARD
C
N
1
36P
6
C
N
8P
3
1
C
N
1
4P
2
C
N
2P
1
9
C
N
2
4P
5
C
N
4P
1
9
C
N
1
2P
7
C
N
4P
1
3
C
N
5
CN1
10P
MAIN PBA
CN20 CN24CN3
CN30
CN27
External
Auditron
2P6P2P
2P
(2MB)
PS3
CN15(100P )
SDRAM DIMM
16MB
CN15(100P)
CN28
3P
3P
CN22
C
N
10P
1
4
C
N
8P
3
3
C
11P
N
4
C
N
2P
7
C
N
3P
1
0
C
N
3P
1
1
3P
C
N
1
8
C
3P
N
2
3
C
N
4P
2
1
C
N
2P
2
6
C
N
4P
2
9
TRANSFORMER
4P
1
600/ / 600
SMPS / HVPS
+5V/+24V/+12V/+24V s/Fuser
DEV MOTOR
FEED MOTOR
LSU
THERMISTOR
FAN1
FAN1
DEV_ID
TONER_TX
TONER_RX
PTL
COVER OPEN
S/W
+24 V / +5V
Tx: Rx
MODEM
EXT_PHONE
SEPRATING
PART
LIU
LINE 1
EXTERNAL
PHONE
INTERFACE
PART
EXTERNAL
PHONE
SOLENOID
PICK_UP,DUPLEX,MP
PAPER
SENSOR
FEED+P.EMP,EXIT,MP
LINE
INT ERFACE
<Block Diagram>
3-1
Page 2
Circuit Description
3-2 Circuit Operation
3-2-1 Clock
1) System Clock
Device Oscillator
Frequency 12MHz
• ARM946ES RISC PROCESSOR: drives PLL internally uses 120MHz and external Bus uses 60 MHz.
2) Video Clock
Device Oscillator
Frequency 57.0167MHz
• Fvd =((PAPER 1SCAN LINE sending time * SCAN effective late /1SCAN LINE DOT #)*4
=(600dpi*600dpi*58.208mm/s*216mm*4)/(25.4mm*25.4mm*76.1%)=28.697MHz
•PAPER 1SCAN LINE sending time=SCAN LINE interval/DOCUMENT SPEED (58.208mm/S)
•1SCAN LINE DOT #=MAZ SCAN distance(216mm)*DOT# per 1mm
3)USB Clock
Device Oscillator
Frequency 48MHz
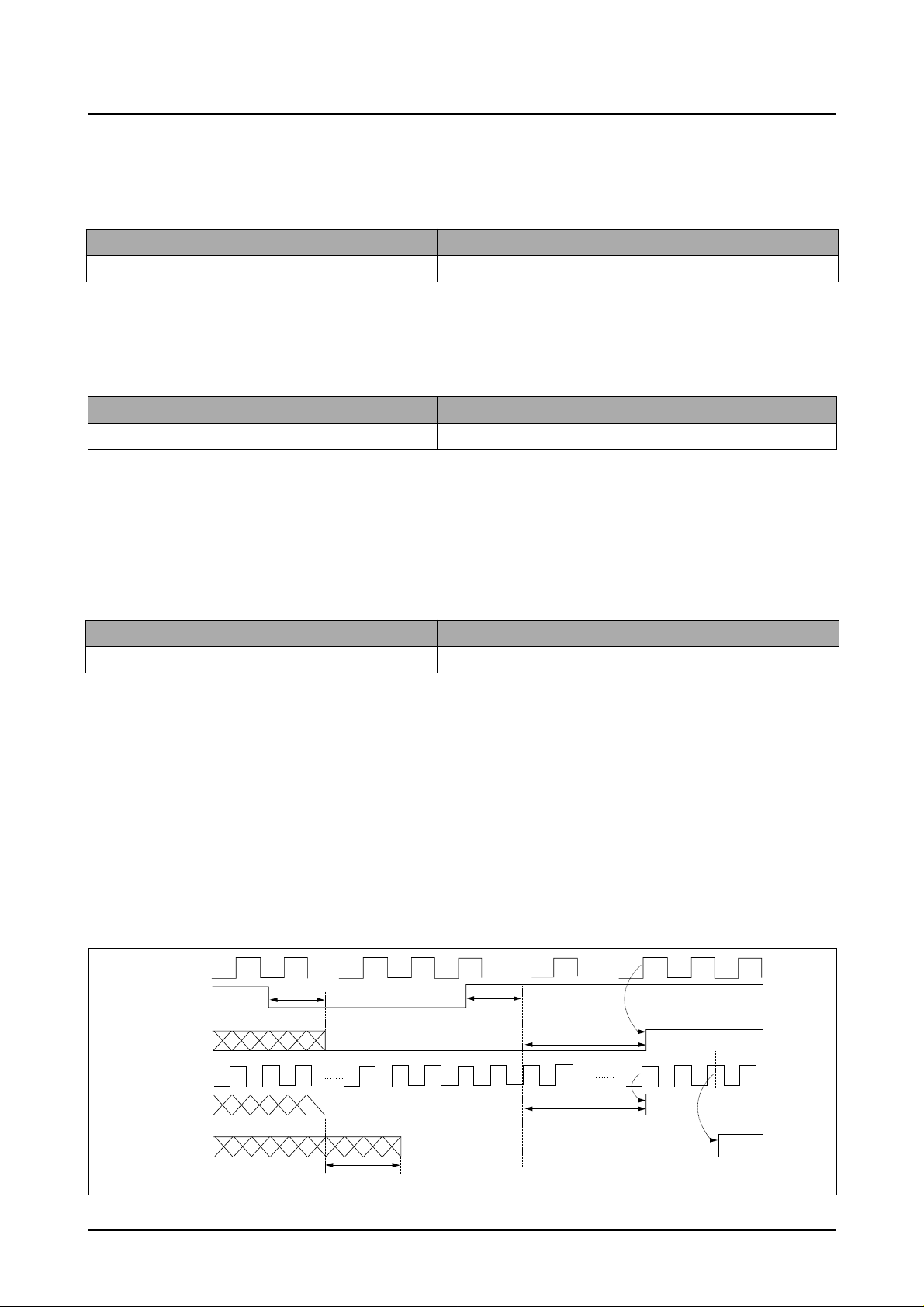
3-2-2 POWER ON/OFF RESET
1) Signal Operation
Input Signal +3.3V Power Line (VCC)
Output Signal ARM946ES nRESET and 29LU16ø
• POWER ON/OFF DETECT VCC RISING/FALLING 4.5° ≠ 4.6V
RESET TIME (Td) 1.48~1.52ms
• Td=(Ct*V sensing)/I charge (...Ct=33µF, Is=100µA)
2) TIMING CHART
MCLK
nRESET
20 MCLK
nPWRGD
20 MCLK
5.461 ms
(65535 MCLK)
3-2
HICLK
reRESETn
RESETn
CLK falling
5.461 ms
(65535 MCLK)
15 HCLK
Page 3
Circuit Description
3-2-3 RISC MICROPROCESSOR
1) RISC MICROCESSOR PIN & INTERFACE(SPGPm)
Ball No Pin No Pin Name I/O Description PAD
B1 1 SD15 I/O SDRAM Bus Data[15] BD8TARP_TC
C2 2 VSS_PLL1 - VSS for Core PLL D2 3 VDD_PLL1 - VDD for Core PLL (1.8V) D3 4 DATA0 / GPI1 I/O ROM Bus Data[0] / GPI[1] BD8TRP_FT
E4 5 MCLK I Core PLL Clock Input (12MHz) TLCHT_TC
C1 6 DATA6 / GPI7 I/O ROM Bus Data[6] / GPI[7] BD8TRP_FT
D1 7 DATA1 / GPI2 I/O ROM Bus Data[1] / GPI[2] BD8TRP_FT
E3 8 DATA5 / GPI6 I/O ROM Bus Data[5] / GPI[6] BD8TRP_FT
E2 9 VDD_RING_OSC - VDD for Ring Oscillator (1.8V) E1 10 DATA3 / GPI4 I/O ROM Bus Data[3] / GPI[4] BD8TRP_FT
F3 11 DATA9 / GPI10 I/O ROM Bus Data[9] / GPI[10] BD8TRP_FT
G4 12 GND - GROUND_RING F2 13 DATA8 / GPI9 I/O ROM Bus Data[8] / GPI[9] BD8TRP_FT
F1 14 DATA7 / GPI8 I/O ROM Bus Data[7] / GPI[8] BD8TRP_FT
G3 15 DATA12 / GPI13 I/O ROM Bus Data[12] / GPI[13] BD8TRP_FT
G2 16 DATA11 / GPI12 I/O ROM Bus Data[11] / GPI[12] BD8TRP_FT
G1 17 DATA10 / GPI11 I/O ROM Bus Data[10] / GPI[11] BD8TRP_FT
H3 18 DATA4 / GPI5 I/O ROM Bus Data[4] / GPI[5] BD8TRP_FT
H2 19 DATA15 / GPI16 I/O ROM Bus Data[15] / GPI[16] BD8TRP_FT
H1 20 DATA14 / GPI15 I/O ROM Bus Data[14] / GPI[15] BD8TRP_FT
J4 21 VDD_CORE - VDD for CORE (1.8V) J3 22 DATA19 I/O ROM Bus Data[19] BD8TRP_FT
J2 23 DATA18 I/O ROM Bus Data[18] BD8TRP_FT
J1 24 DATA17 I/O ROM Bus Data[17] BD8TRP_FT
K2 25 DATA16 I/O ROM Bus Data[16] BD8TRP_FT
K3 26 DATA22 I/O ROM Bus Data[22] BD8TRP_FT
K1 27 DATA13 / GPI14 I/O ROM Bus Data[14] / GPI[14] BD8TRP_FT
L1 28 DATA20 I/O ROM Bus Data[20] BD8TRP_FT
L2 29 DATA21 I/O ROM Bus Data[21] BD8TRP_FT
L3 30 DATA25 I/O ROM Bus Data[25] BD8TRP_FT
L4 31 DATA26 I/O ROM Bus Data[26] BD8TRP_FT
M1 32 DATA23 I/O ROM Bus Data[23] BD8TRP_FT
M2 33 DATA24 I/O ROM Bus Data[24] BD8TRP_FT
M3 34 DATA29 I/O ROM Bus Data[29] BD8TRP_FT
M4 35 DATA30 I/O ROM Bus Data[30] BD8TRP_FT
N1 36 DATA27 I/O ROM Bus Data[27] BD8TRP_FT
N2 37 DATA28 I/O ROM Bus Data[28] BD8TRP_FT
N3 38 VDD_ARM - VDD for ARM -
P1 39 DATA31 I/O ROM Bus Data[31] BD8TRP_FT
P2 40 DATA2 / GPI3 I/O ROM Bus Data[2] / GPI[3] BD8TRP_FT
R1 41 VDD_CORE - VDD for CORE (1.8V) -
P3 42 nROMCS2 O ROM Bank2 Select_n B4TR_TC
3-3
Page 4
Circuit Description
Ball No Pin No Pin Name I/O Description PAD
R2 43 nRD O ROM Bus Read_n B4TR_TC
T1 44 nROMCS0 O ROM Bank0 Select_n B4TR_TC
P4 45 nROMCS3 / nIOCS3 /
R3 46 nWR O ROM Bus Write_n B4TR_TC
T2 47 nROMCS1 O ROM Bank1 Select_n B4TR_TC
U1 48 ADDR12 O ROM Bus Addr[12] B8TR_TC
T3 49 ADDR10 O ROM Bus Addr[10] B8TR_TC
U2 50 ADDR13 O ROM Bus Addr[13] B8TR_TC
V1 51 ADDR15 O ROM Bus Addr[15] B8TR_TC
T4 52 ADDR11 O ROM Bus Addr[11] B8TR_TC
U3 53 ADDR14 O ROM Bus Addr[14] B8TR_TC
V2 54 ADDR16 O ROM Bus Addr[16] B8TR_TC
W1 55 ADDR19 I/O ROM Bus Addr[19] BD8TRP_TC
V3 56 ADDR17 I/O ROM Bus Addr[17] BD8TRP_TC
W2 57 ADDR20 I/O ROM Bus Addr[20] BD8TRP_TC
Y1 58 nIOCS0 O IO Bank0 Select_n B4TR_TC
W3 59 ADDR21 I/O ROM Bus Addr[21] BD8TRP_TC
Y2 60 nIOCS1 O IO Bank1 Select_n B4TR_TC
W4 61 ADDR22 I/O ROM Bus Addr[22] BD8TRP_TC
V4 62 ADDR18 I/O ROM Bus Addr[18] BD8TRP_TC
U5 63 ADDR7 O ROM Bus Addr[7] B8TR_TC
Y3 64 VDD_CORE O VDD for CORE (1.8V) Y4 65 nIOCS2 / nDACK0 /
V5 66 ADDR1 O ROM Bus Addr[1] B8TR_TC
W5 67 ADDR8 O ROM Bus Addr[8] B8TR_TC
Y5 68 ADDR9 O ROM Bus Addr[9] B8TR_TC
V6 69 ADDR4 O ROM Bus Addr[4] B8TR_TC
U7 70 ADDR6 O ROM Bus Addr[6] B8TR_TC
W6 71 ADDR2 O ROM Bus Addr[2] B8TR_TC
Y6 72 ADDR3 O ROM Bus Addr[3] B8TR_TC
V7 73 ADDR5 O ROM Bus Addr[5] B8TR_TC
W7 74 VDD_ARM - VDD for ARM Hard Macro(1.8V) -
Y7 75 VDD_CORE - VDD for CORE (1.8V) V8 76 EINT0 / TnRST I Ext. Interrupt0 / TAP Controller
W8 77 EINT1 / TCK I Ext. Interrupt1 / TAP Controller
Y8 78 EINT2 / nRXD2 / TMS I Ext. Interrupt2 / U AR T RX DATA[2] /
U9 79 EINT3 / nTXD2 / GPO9 I/O Ext. Interrupt3 / UART TX Data[2] /
V9 80 nRxD0 I UART RX Data[0] SCHMITT_FT
W9 81 nRxD1 / GPI17 / TDI I UART RX Data[1] / GPI[17] / TAP
Y9 82 nTxD0 O UAR T TX Data[0] B4TR_TC
W10 83 TESTMODE I TESTMODE (Nomal : 0) SCHMITT_TC
GPO1
GPO2
O ROM Bank3 Select_n / IO Bank3
Select_n / GPO[1]
O IO Bank2 Select_n / DMA IO Bank0
ACK_n / GPO[2]
Reset_n
Clock
TAP Controller Mode Select
GPO[9]
Controller Data In
B4TR_TC
B4TR_TC
SCHMITT_FT
SCHMITT_FT
SCHMITT_FT
BD4STRP_FT
SCHMITT_FT
3-4
Page 5
Ball No Pin No Pin Name I/O Description PAD
V10 84 nTxD1 / GPO10 / TDO O UART Tx Data[1] / GPO[10] / Tap
Controller Data Out
Y10 85 TESTSE I TESTSE (Normal : 0) SCHMITT_TC
Y11 86 VDD_CORE - VDD for CORE (1.8V) -
W11 87 RXERR / GPI25 I MAC RX Error / GPI[25] SCHMITT_TC
V11 88 GND - GROUND_RING U11 89 RX_DV / GPI20 O MAC RX Data Valid / GPI[20] SCHMITT_TC
Y12 90 RXD0 / GPI21 O MAC RX Data[0] / GPI[21] SCHMITT_TC
W12 91 nLFPHB1 / nPRINT O Motor Out B_n / Print Start_n B4TR_TC
V12 92 nLFPHB0 / nCMSG O Motor Out B / Command
Message_n
U12 93 nLFPHA0 / CCLK O Motor Out A / Communication Clock B4TR_TC
Y13 94 RXD1 / GPI22 I MAC RX Data[1] / GPI[22] SCHMITT_TC
W13 95 VDO O Video Data Out B8TR_TC
V13 96 SPD / nDREQ3 I/O DIMM Detect / DMA REQ[3]_n BD4SRTP_TC
Y14 97 nWAIT1 / CRS I Wait_n / MAC Carrier Sensor SCHMITT_TC
W14 98 COL / EINT4 I MAC Collision Detect / Ext.
Interrupt4
Y15 99 TX_EN O MAC TX Enable B4TR_TC
V14 100 MDIO I/O MAC Management Data Inout BD4STRUQP_TC
W15 101 TXD3 / GPO14 O MAC TX Data[3] / GPO[14] B4TR_TC
Y16 102 TXD2 / GPO13 O MAC TX Data[2] / GPO[13] B4TR_TC
U14 103 MDC / GPO15 O MAC Management Data Clock /
GPO[15]
V15 104 TXCLK / GPI18 I MAC TX Clock(25MHz) / GPI[18] SCHMITT_TC
W16 105 TXD1 / GPO12 O MAC TX Data[1] / GPO[12] B4TR_TC
Y17 106 PD4 I/O Parallel Port Data[4] BD4STRP_FT
V16 107 TXD0 / nIOCS3 O MAC TX Data[0] / IO Bank3
Select_n
W17 108 RXD3 / GPI24 I MAC RX Data[3] / GPI[24] SCHMITT_TC
Y18 109 PD2 I/O Parallel Port Data[2] BD4STRP_FT
U16 110 PD6 I/O Parallel Port Data[6] BD4STRP_FT
V17 111 RXD2 I MAC RX Data[2] / GPI[23] SCHMITT_TC
W18 112 PWMOUT2 O PWM Output[2] B4TR_TC
Y19 113 VCLK I Video Reference Clock TLCHT_TC
V18 114 RXCLK / GPI19 I MAC RX Clock(25MHz) / GPI[19] SCHMITT_TC
W19 115 PD1 I/O Parallel Port Data[1] BD4STRP_FT
Y20 116 nINIT I Parallel Port Initialization_n SCHMITT_FT
W20 117 VSS_ADC - VSS for ADC -
V19 118 ATEST_OUT O ADC Test Output ANA_TC
U19 119 AIN2 I ADC Channel2 Input ANA_TC
U18 120 AIN1 I ADC Channel1 Input ANA_TC
T17 121 AIN0 I ADC Channel0 Input ANA_TC
V20 122 VDD_ADC - Analog power for ADC (3.3V) U20 123 VDD_CORE - VDD for CORE (1.8V) T18 124 GND - GROUND_RING T19 125 VDD_CORE - VDD for CORE (1.8V) -
Circuit Description
B4TR_TC
B4TR_TC
SCHMITT_TC
B4TR_TC
B4TR_TC
3-5
Page 6
Circuit Description
Ball No Pin No Pin Name I/O Description PAD
T20 126 VDD_CORE - VDD for CORE (1.8V) R18 127 VBUS I USB Detect SCHMITT_FT
P17 128 nLREADY / nEBSY I LSU Ready_n / Engine Busy_n SCHMITT_FT
R19 129 nSELECTIN I Parallel Port Select Input_n SCHMITT_FT
R20 130 LSUCLK / nCBSY /
P18 131 PD7 I/O Parallel Port Data[7] BD4STRP_FT
P19 132 PWMOUT1 O PWM Output[1] B4TR_TC
P20 133 PWMOUT0 O PWM Output[0] B4TR_TC
N18 134 nEMSG / nDACK3 /
N19 135 nFSYNC / nLFPHA1 I/O Frame Sync_n / Motor Out A_n BD4STRP_FT
N20 136 nHSYNC I Line Sync_n SCHMITT_FT
M17 137 nSTROBE I Parallel Port Data Strobe_n SCHMITT_FT
M18 138 PD5 I/O Parallel Port Data[5] BD4STRP_FT
M19 139 nWAIT0 / PDE I/O Wait_n / Parallel Port Data Enable BD4STRP_TC
M20 140 nIOCS5 / nSCS4 /
L19 141 PD3 I/O Parallel Port Data[3] BD4STRP_FT
L18 142 nFAULT O Parallel Port Fault_n B4TR_TC
L20 143 nDREQ0 / GPI0 /
K20 144 nRESET I External Reset_n Input SCHMITT_TC
K19 145 PERROR O Parallel Port Paper Error B4TR_TC
K18 146 nAUTOFD I Parallel Port Auto Feed_n SCHMITT_FT
K17 147 nDACK2 / DQM7 /
J20 148 nDREQ2 / DQM6 /
J19 149 nDREQ1 / DQM4 /
J18 150 VDD_CORE - VDD for CORE (1.8V) J17 151 nSCS0 O SDRAM Bank0 Select_n BD8TARP_TC
H20 152 nSCS2 O SDRAM Bank2 Select_n BD8TARP_TC
H19 153 nCAS O SDRAM Column Address Select_n BD8TARP_TC
H18 154 nSCS1 O SDRAM Bank1 Select_n BD8TARP_TC
G20 155 nIOCS4 / nSCS3 /
G19 156 BUSY O Parallel Port Busy B4TR_TC
F20 157 PD0 I/O Parallel Port Data[0] BD4STRP_FT
G18 158 SLCT_OUT O Parallel Port Selection Out B4TR_TC
F19 159 nACK O Parallel Port Acknowledge_n B4TR_TC
E20 160 nDACK1 / DQM5 /
G17 161 nRSTOUT / CLKOUT /
F18 162 SA7 O SDRAM Bus Addr[7] BD8TARP_TC
E19 163 SA9 O SDRAM Bus Addr[9] BD8TARP_TC
GPO11
PWMOUT3
GPO3 / TONEOUT
ADDR23
GPO5
GPO6
GPO8
GPO4
GPO7
GPO0
O LSU Clock / Command Busy_n /
GPO[11]
I/O Engine Message_n / DMA
ACK[3]_n / PWM Output[3]
O DRAM Bank4 / IO Bank5 Select_n /
GPO[3] / Tone Pulse Out
I/O DMA REQ[0]_n / GPI[0] / ADDR[23] BD4STRP_TC
O DMA ACK[2]_n / DQM[7] / GPO[5] BD8TARP_TC
I/O DMA REQ[2]_n / DQM[6] / GPO[6] BD8TARP_TC
I/O DMA REQ[1]_n / DQM[4] / GPO[8] BD8TARP_TC
O IO Bank4 / SDRAM Bank3 Select_n
/ GPO[4]
O DMA ACK[1]_n / DQM[5] / GPO[7] BD8TARP_TC
O Internal Reset_n Out / Internal Sys-
tem Clock Out / GPO[0]
B4TR_TC
BD4STRP_FT
BD8TARP_TC
BD8TARP_TC
B8TR_TC
3-6
Page 7
Ball No Pin No Pin Name I/O Description PAD
D20 164 VDD_USB - VDD for USB Hard Macro (1.8V) E18 165 SA10 O SDRAM Bus Addr[10] BD8TARP_TC
D19 166 SA12 O SDRAM Bus Addr[120 BD8TARP_TC
C20 167 BA0 O SDRAM Bus Bank Select Addr[0] BD8TARP_TC
E17 168 nRAS O SDRAM Row Address Select_n BD8TARP_TC
D18 169 DQM2 O SDRAM Bus DQM[2] BD8TARP_TC
C19 170 DQM1 O SDRAM Bus DQM[1] BD8TARP_TC
B20 171 BA1 O SDRAM Bus Bank Select Addr[1] BD8TARP_TC
C18 172 DQM0 O SDRAM Bus DQM[0] BD8TARP_TC
B19 173 DQM3 O SDRAM Bus DQM[3] BD8TARP_TC
A20 174 RREF I/O USB PHY Register Reference ANA_FT
A19 175 VSSL - VSS for Deserialisation Flip flops B18 176 VDDL - VDD for Deserialisation Flip flops
(1.8V)
B17 177 VSSB - VSS for buffers C17 178 DMNS I/O USB2 DATA- ANA_FT
D16 179 DPLS I/O USB2 DATA+ ANA_FT
A18 180 VDD3_USB - VDD for USB1.1 FS compliance
(3.3V)
A17 181 VSSC - VSS for DLL and Xor tree C16 182 VDDC - VDD for DLL and Xor tree (1.8V) B16 183 VDDB - VDD for buffers (1.8V) A16 184 VDD_USB - VDD for USB Hard Macro (1.8V) C15 185 UCLK I USB PLL Input Clock (12MHz) TLCHT_TC
D14 186 VSS_PLL2 - VSS for USB PLL B15 187 VDD_PLL2 - VSS for USB PLL (1.8V) A15 188 SA11 O SDRAM Bus Addr[11] BD8TARP_TC
C14 189 SA6 O SDRAM Bus Addr[6] BD8TARP_TC
B14 190 SA5 O SDRAM Bus Addr[5] BD8TARP_TC
A14 191 SA8 O SDRAM Bus Addr[8] BD8TARP_TC
C13 192 SA3 O SDRAM Bus Addr[3] BD8TARP_TC
B13 193 SA2 O SDRAM Bus Addr[2] BD8TARP_TC
A13 194 SA4 O SDRAM Bus Addr[4] BD8TARP_TC
D12 195 SA0 O SDRAM Bus Addr[0] BD8TARP_TC
C12 196 SA1 O SDRAM Bus Addr[1] BD8TARP_TC
B12 197 CKE O SDRAM Clock Enable BD8TARP_TC
A12 198 nWE O SDRAM Write Enable_n BD8T ARP_TC
B11 199 SD30 I/O SDRAM Bus Data[30] BD8TARP_TC
C11 200 SD31 I/O SDRAM Bus Data[31] BD8TARP_TC
A11 201 SD29 I/O SDRAM Bus Data[29] BD8TARP_TC
A10 202 SD25 I/O SDRAM Bus Data[25] BD8TARP_TC
B10 203 SD26 I/O SDRAM Bus Data[26] BD8TARP_TC
C10 204 SD27 I/O SDRAM Bus Data[27] BD8TARP_TC
D10 205 SD28 I/O SDRAM Bus Data[28] BD8TARP_TC
A9 206 SD21 I/O SDRAM Bus Data[21] BD8TARP_TC
B9 207 SD22 I/O SDRAM Bus Data[22] BD8TARP_TC
Circuit Description
-
-
3-7
Page 8
Circuit Description
Ball No Pin No Pin Name I/O Description PAD
C9 208 SD23 I/O SDRAM Bus Data[23] BD8TARP_TC
D9 209 SD24 I/O SDRAM Bus Data[24] BD8TARP_TC
A8 210 SD18 I/O SDRAM Bus Data[18] BD8TARP_TC
B8 211 SDCLK0 O SDRAM Clock Output0 BD8TARP_TC
C8 212 SD20 I/O SDRAM Bus Data[20] BD8TARP_TC
A7 213 SD14 I/O SDRAM Bus Data[14] BD8TARP_TC
B7 214 SD19 I/O SDRAM Bus Data[19] BD8TARP_TC
A6 215 SD11 I/O SDRAM Bus Data[11] BD8TARP_TC
C7 216 SD16 I/O SDRAM Bus Data[16] BD8TARP_TC
B6 217 SDCLK1 O SDRAM Clock Output1 BD8TARP_TC
A5 218 SD12 I/O SDRAM Bus Data[12] BD8TARP_TC
D7 219 SD17 I/O SDRAM Bus Data[17] BD8TARP_TC
C6 220 SD13 I/O SDRAM Bus Data[13] BD8TARP_TC
B5 221 SD8 I/O SDRAM Bus Data[8] BD8TARP_TC
A4 222 SD5 I/O SDRAM Bus Data[5] BD8TARP_TC
C5 223 SD9 I/O SDRAM Bus Data[9] BD8TARP_TC
B4 224 SD6 I/O SDRAM Bus Data[6] BD8TARP_TC
A3 225 SD3 I/O SDRAM Bus Data[3] BD8TARP_TC
D5 226 SD10 I/O SDRAM Bus Data[10] BD8TARP_TC
C4 227 SD7 I/O SDRAM Bus Data[7] BD8TARP_TC
B3 228 SD4 I/O SDRAM Bus Data[4] BD8TARP_TC
B2 229 SD1 I/O SDRAM Bus Data[1] BD8TARP_TC
A2 230 SD0 I/O SDRAM Bus Data[0] BD8TARP_TC
C3 231 SD2 I/O SDRAM Bus Data[2] BD8TARP_TC
3-8
Page 9
Circuit Description
2) RISC MICROCESSOR PIN & INTERFACE(CIP4)
No Pin Name I/O Description Pad T ype Current drive
1 GND2 P Vss Supply vss2i 2 NTEST I Nand T ree Test Mode Selection pticd 3 TM I Global Test Mode Selection pticd 4 TEST1 I Test Mode Selection 1 pticd 5 GND17 P Vss Supply vss3op 6 TEST2 I Test Mode Selection 2 pticd 7 XDACK1 I DMA Acknowledge Signal 1 ptis 8 XDREQ1 O DMA Request Signal 1 phob4 4mA
9 VDD1 P Vdd Supply vdd2i 10 XDACK2 I DMA Acknowledge Signal 2 ptis 11 XDREQ2 O DMA Request Signal 2 phob4 4mA
12 XDACK3 I DMA Acknowledge Signal 3 ptis 13 XDREQ3 O DMA Request Signal 3 phob4 4mA
14 nRESET I Global Reset ptis 15 CLK_OUT O PLL Clock Out phob12 12mA
16 GND3 P Vss Supply vss2i 17 XP I Clock Oscillation Input phsoscm26 10~40MHz
18 XPOUT O Clock Oscillation Output phsoscm26 10~40MHz
19 GNDD16 P Vss Supply vss2t_abb 20 FILTER* O PLL Filter Pump Out poar50_abb 21 GND1 P Vss Supply vbb_abb 22 VDDA9,VDDD9 P Vdd Supply vdd2t_abb 23 GND24,GND33 P Vss Supply vss3t_abb 24 RTC_XO O RTC Clock Oscillation Output poar50_abb 25 RTC_XI I RTC Clock Oscillation Input piar50_abb 26 VDD8,VDD18 P Vdd Supply vdd3t_abb 27 IRQ O Interrupt Request Signal phob4 4mA
28 nCS I CIP4 Chip Select ptis 29 GND4 P Vss Supply vss2i 30 nRD I CIP4 CPU Read Control ptis 31 nWR I CIP4 CPU Write Control ptis 32 BA1 I Bank Address Bus [1] ptis 33 BA0 I Bank Address Bus [0] ptis 34 GND19 P Vss Supply vss3op 35 A5 I CPU Address Bus [5] ptis 36 A4 I CPU Address Bus [4] ptis 37 A3 I CPU Address Bus [3] ptis 38 VDD2 P Vdd Supply vdd2i 39 A2 I CPU Address Bus [2] ptis 40 A1 I CPU Address Bus [1] ptis 41 A0 I CPU Address Bus [0] ptis 42 GND5 P Vss Supply vss2i 43 D31 B CPU Data Bus [31] phbst8 8mA
3-9
Page 10
Circuit Description
No Pin Name I/O Description Pad T ype Current drive
44 D30 B CPU Data Bus [30] phbst8 8mA
45 D29 B CPU Data Bus [29] phbst8 8mA
46 D28 B CPU Data Bus [28] phbst8 8mA
47 GND20 P Vss Supply vss3op 48 D27 B CPU Data Bus [27] phbst8 8mA
49 D26 B CPU Data Bus [26] phbst8 8mA
50 D25 B CPU Data Bus [25] phbst8 8mA
51 VDD11 P Vdd Supply vdd3op 52 D24 B CPU Data Bus [24] phbst8 8mA
53 D23 B CPU Data Bus [23] phbst8 8mA
54 D22 B CPU Data Bus [22] phbst8 8mA
55 D21 B CPU Data Bus [21] phbst8 8mA
56 GND6 P Vss Supply vss2i 57 D20 B CPU Data Bus [20] phbst8 8mA
58 D19 B CPU Data Bus [19] phbst8 8mA
59 D18 B CPU Data Bus [18] phbst8 8mA
60 GND21 P Vss Supply vss3op 61 D17 B CPU Data Bus [17] phbst8 8mA
62 D16 B CPU Data Bus [16] phbst8 8mA
63 D15 B CPU Data Bus [15] phbst8 8mA
64 D14 B CPU Data Bus [14] phbst8 8mA
65 VDD3 P Vdd Supply vdd2i 66 D13 B CPU Data Bus [13] phbst8 8mA
67 D12 B CPU Data Bus [12] phbst8 8mA
68 D11 B CPU Data Bus [11] phbst8 8mA
69 GND7 P Vss Supply vss2i 70 D10 B CPU Data Bus [10] phbst8 8mA
71 D9 B CPU Data Bus [9] phbst8 8mA
72 D8 B CPU Data Bus [8] phbst8 8mA
73 D7 B CPU Data Bus [7] phbst8 8mA
74 GND22 P Vss Supply vss3op 75 D6 B CPU Data Bus [6] phbst8 8mA
76 D5 B CPU Data Bus [5] phbst8 8mA
77 D4 B CPU Data Bus [4] phbst8 8mA
78 VDD12 P Vdd Supply vdd3op 79 D3 B CPU Data Bus [3] phbst8 8mA
80 D2 B CPU Data Bus [2] phbst8 8mA
81 D1 B CPU Data Bus [1] phbst8 8mA
82 D0 B CPU Data Bus [0] phbst8 8mA
83 GND8 P Vss Supply vss2i 84 TX_EN1 O Motor Control Tx Enable 1 phob4 4mA
85 TX_EN2 O Motor Control Tx Enable 2 phob4 4mA
86 TX_A O Motor Control Tx Channel A phob4 4mA
87 TX_B O Motor Control Tx Channel B phob4 4mA
88 GND23 P Vss Supply vss3op -
3-10
Page 11
No Pin Name I/O Description Pad T ype Current drive
89 nTX_A O Motor Control Tx Channel A phob4 4mA
90 nTX_B O Motor Control Tx Channel A phob4 4mA
91 MOTOR_POL I Motor Polarity ptis 4mA
92 VDD4 P Vdd Supply vdd2i 93 PItg1 O CIS/CCD PItg1 Signal phob8 8mA
94 PI1 O CIS/CCD PI1 Signal phob8 8mA
95 PI2 O CIS/CCD PI2 Signal phob8 8mA
96 GND9 P Vss Supply vss2i 97 PIrs O CIS/CCD PIrs Signal phob8 8mA
98 PIcp O CIS/CCD PIsh Signal phob8 8mA
99 ADC_CLK O AFE ADC Clock phob8 8mA
100 VDD13 P Vdd Supply vdd3op 101 CDS2_CLK O AFE CDS2 Clock phob8 8mA
102 SCLK1 O AFE SIO Sync. Clock phob8 8mA
103 SLOAD1 O AFE SIO Read/Write Control Signal phob8 8mA
104 VDD10 P Vdd Supply vdd3op 105 SDO1 O AFE SIO Serial Output 1 phob8 8mA
106 SDIO1 B AFE SIO Serial Inout/Output 1 phbst8 8mA
107 SDIO2 B AFE SIO Serial Inout/Output 2 phbst8 8mA
108 GND10 P Vss Supply vss2i 109 AFE_D9 I A/D Converted Data Bus [9] ptis 110 AFE_D8 I A/D Converted Data Bus [8] ptis 111 AFE_D7 I A/D Converted Data Bus [7] ptis 112 AFE_D6 I A/D Converted Data Bus [6] ptis 113 VDD5 P Vdd Supply vdd2i 114 AFE_D5 I A/D Converted Data Bus [5] ptis 115 AFE_D4 I A/D Converted Data Bus [4] ptis 116 AFE_D3 I A/D Converted Data Bus [3] ptis 117 GND25 P Vss Supply vss3op 118 AFE_D2 I A/D Converted Data Bus [2] ptis 119 AFE_D1 I A/D Converted Data Bus [1] ptis 120 AFE_D0 I A/D Converted Data Bus [0] ptis 121 GND11 P Vss Supply vss2i 122 SRAM_A15 O SRAM Address Bus [15] phob8 8mA
123 SRAM_A14 O SRAM Address Bus [14] phob8 8mA
124 SRAM_A13 O SRAM Address Bus [13] phob8 8mA
125 SRAM_A12 O SRAM Address Bus [12] phob8 8mA
126 VDD14 P Vdd Supply vdd3op 127 SRAM_A11 O SRAM Address Bus [11] phob8 8mA
128 SRAM_A10 O SRAM Address Bus [10] phob8 8mA
129 SRAM_A9 O SRAM Address Bus [9] phob8 8mA
130 GND26 P Vss Supply vss3op 131 SRAM_A8 O SRAM Address Bus [9] phob8 8mA
132 SRAM_A7 O SRAM Address Bus [9] phob8 8mA
133 SRAM_A6 O SRAM Address Bus [9] phob8 8mA
Circuit Description
3-11
Page 12
Circuit Description
No Pin Name I/O Description Pad T ype Current drive
134 SRAM_A5 O SRAM Address Bus [9] phob8 8mA
135 GND12 P Vss Supply vss2i 136 SRAM_A4 O SRAM Address Bus [9] phob8 8mA
137 SRAM_A3 O SRAM Address Bus [9] phob8 8mA
138 SRAM_A2 O SRAM Address Bus [9] phob8 8mA
139 SRAM_A1 O SRAM Address Bus [9] phob8 8mA
140 VDD6 P Vdd Supply vdd2i 141 SRAM_A0 O SRAM Address Bus [9] phob8 8mA
142 SRAM_nWR O SRAM Write Enable Signal phob8 8mA
143 SRAM_D15 B SRAM Data Bus [15] phbst8 8mA
144 SRAM_D14 B SRAM Data Bus [14] phbst8 8mA
145 GND27 P Vss Supply vss3op 146 SRAM_D13 B SRAM Data Bus [13] phbst8 8mA
147 SRAM_D12 B SRAM Data Bus [12] phbst8 8mA
148 SRAM_D11 B SRAM Data Bus [11] phbst8 8mA
149 GND13 P Vss Supply vss2i 150 SRAM_D10 B SRAM Data Bus [10] phbst8 8mA
151 SRAM_D9 B SRAM Data Bus [9] phbst8 8mA
152 SRAM_D8 B SRAM Data Bus [8] phbst8 8mA
153 SRAM_D7 B SRAM Data Bus [7] phbst8 8mA
154 VDD15 P Vdd Supply vdd3op 155 SRAM_D6 B SRAM Data Bus [6] phbst8 8mA
156 SRAM_D5 B SRAM Data Bus [5] phbst8 8mA
157 SRAM_D4 B SRAM Data Bus [4] phbst8 8mA
158 GND28 P Vss Supply vss3op 159 SRAM_D3 B SRAM Data Bus [3] phbst8 8mA
160 SRAM_D2 B SRAM Data Bus [2] phbst8 8mA
161 SRAM_D1 B SRAM Data Bus [1] phbst8 8mA
162 SRAM_D0 B SRAM Data Bus [0] phbst8 8mA
163 GND14 P Vss Supply vss2i 164 GPO7/PItg2 O General Purpose Output [7] phob8 8mA
165 GPO6/RLED O General Purpose Output [6] phob8 8mA
166 GPO5/GLED O General Purpose Output [5] phob8 8mA
167 GPO4/BLED O General Purpose Output [4] phob8 8mA
168 VDD7 P Vdd Supply vdd2i 169 GPO3/PItg3 O General Purpose Output [3] phob8 8mA
170 GPO2/PIsh O General Purpose Output [2] phob8 8mA
171 GPO1/
LEVEL_SHIFT
172 GPO0 O General Purpose Output [0] phob8 8mA
173 GND29 P Vss Supply vss3op 8mA
174 GPIO2B/AFE_D11 B General Purpose Input/Output 2 [11] phbst8 8mA
175 GPIO2A/AFE_D10 B General Purpose Input/Output 2 [10] phbst8 176 GPIO29/AFE_D9 B General Purpose Input/Output 2 [9] phbst8 8mA
177 GND30 P Vss Supply vss3op 8mA
178 GPIO28/AFE_D8 B General Purpose Input/Output 2 [8] phbst8 8mA
O General Purpose Output [1] phob8 8mA
3-12
Page 13

No Pin Name I/O Description Pad T ype Current drive
179 GPIO27/AFE_D7 B General Purpose Input/Output 2 [7] phbst8 8mA
180 GPIO26/AFE_D6 B General Purpose Input/Output 2 [6] phbst8 181 GPIO25/AFE_D5 B General Purpose Input/Output 2 [5] phbst8 8mA
182 VDD16 P Vdd Supply vdd3op 8mA
183 GPIO24/AFE_D4 B General Purpose Input/Output 2 [4] phbst8 8mA
184 GPIO23/AFE_D3 B General Purpose Input/Output 2 [3] phbst8 8mA
185 GPIO22/AFE_D2 B General Purpose Input/Output 2 [2] phbst8 8mA
186 GND15 P Vss Supply vss2i 8mA
187 GPIO21/AFE_D1 B General Purpose Input/Output 2 [1] phbst8 8mA
188 GPIO20/AFE_D0 B General Purpose Input/Output 2 [0] phbst8 8mA
189 GPIO1F/
SRAM_D15
190 GPIO1E/
SRAM_D14
191 GND31 P Vss Supply vss3op 8mA
192 GPIO1D/
SRAM_D13
193 GPIO1C/
SRAM_D12
194 GPIO1B/
SRAM_D11
195 GPIO1A/
SRAM_D10
196 VDD17 P Vdd Supply vdd3op
197 GPIO19/SRAM_D9 B General Purpose Input/Output 1 [9] phbst8
198 GPIO18/SRAM_D8 B General Purpose Input/Output 1 [8] phbst8
199 GPIO17/SRAM_D7 B General Purpose Input/Output 1 [7] phbst8
200 GND32 P Vss Supply vss3op
201 GPIO16/SRAM_D6 B General Purpose Input/Output 1 [6] phbst8 202 GPIO15/SRAM_D5 B General Purpose Input/Output 1 [5 phbst8 203 GPIO14/SRAM_D4 B General Purpose Input/Output 1 [4] phbst8 204 GPIO13/SRAM_D3 B General Purpose Input/Output 1 [3] phbst8 205 GND18 P Vss Supply vss3op 206 GPIO12/SRAM_D2 B General Purpose Input/Output 1 [2] phbst8 207 GPIO11/SRAM_D1 B General Purpose Input/Output 1 [1] phbst8 208 GPIO10/SRAM_D0 B General Purpose Input/Output 1 [0] phbst8 -
B General Purpose Input/Output 1 [15] phbst8 8mA
B General Purpose Input/Output 1 [14] phbst8 -
B General Purpose Input/Output 1 [13] phbst8 8mA
B General Purpose Input/Output 1 [12] phbst8 -
B General Purpose Input/Output 1 [11] phbst8 4mA
B General Purpose Input/Output 1 [10] phbst8 -
Circuit Description
3-13
Page 14

Circuit Description
3-2-4 PROGRAM ROM (FLASH MEMORY) CONTROL
1) DEVICE
TYPE No.
CAPACITY
AM29LU160DB
4 MBYTE (1MB * 16BITS * 2)
2) PROGRAMMING
BEFORE ASS’Y
AFTER ASS’Y
EPROM PROGRAMMER or PROGRAMMING at the factory
DOWNLOAD from PC
3) OPERATING PRINCIPLE
When the RCSO(ROM CHIP SELECT)signal is activated from the CPU after the POWER is ON, it activates RD SIGNAL and reads the DAT A(HIGH/LO W) stored in the FLASH MEMORY to control the over all system. The FLASH MEMORY may also write. When turning the power on, press and hold the key(power
switch) for 2 - 3 seconds, then the LED will scroll and the PROGRAM DOWNLOAD MODE will be activated.
In this mode, you can download the program through the parallel port.
AC CHARACTERISTICS
Read Status Data (last two cycles)
PA
Addresses
Program Command Sequence (last two cycles)
t
WC
555h
t
AS
PA PA
t
AH
CE#
OE#
t
WP
WE#
Data
RY/BY#
V
t
VCS
CC
t
CS
t
DS
t
DH
A0h
Notes:
1. PA = program address, PD = program data, D
2. Illustration shows device in word mode.
Figure 17. Program Operation Timings
CE#
WE#
BYTE
t
CH
t
WPH
PD
t
BUSY
is the true data at the program address.
OUT
The falling edge of the last WE# signal
t
SET
(tAS)
t
HOLD
t
WHWH1
(tAH)
Status
D
OUT
t
RB
Note: Refer to the Erase/Program Operations table for tAS and tAH specifications.
Figure 16. BYTE# Timings for Write Operations
3-14
Page 15

3-2-5 DRAM CONTROL
1) DEVICE
Circuit Description
TYPE NO.
CAPACITY
2) OPERATING PRINCIPLE
DRAM can either read or write. The data can be stored in the DRAM only when the power is on. It stores
data white the CPU processes data. The address to read and write the data is specified by RAS SIGNAL
and CAS SIGNAL. DRAMWE*SIGNAL is activ ated when writing data and DRAMOE*SIGNAL, when reading. You can expand up to 64MBYTE of DRAM in this system.
Start Address ~ End Address Contents
0x00000000 ~ 0x00FFFFFF ROM Bank0
0x01000000 ~ 0x01FFFFFF ROM Bank1
0x02000000 ~ 0x02FFFFFF ROM Bank2
0x03000000 ~ 0x03FFFFFF ROM Bank3
0x04000000 ~ 0x0FFFFFFF Unused
0x10000000 ~ 0x1FFFFFFF Special Function Registers
0x20000000 ~ 0x20FFFFFF I/O Bank0
0x21000000 ~ 0x21FFFFFF I/O Bank1
0x22000000 ~ 0x22FFFFFF I/O Bank2
0x23000000 ~ 0x23FFFFFF I/O Bank3
0x24000000 ~ 0x24FFFFFF I/O Bank4
0x25000000 ~ 0x25FFFFFF I/O Bank5
0x26000000 ~ 0x26FFFFFF DMA I/O Bank0
0x27000000 ~ 0x27FFFFFF DMA I/O Bank1
0x28000000 ~ 0x28FFFFFF DMA I/O Bank2
0x29800000 ~ 0x29FFFFFF DMA I/O Bank3
0x2A000000 ~ 0x2FFFFFFF Unused
0x30000000 ~ 0x30FFFFFF RSH SRAM
0x31000000 ~ 0x31FFFFFF HPVC SRAM
0x32000000 ~ 0x32FFFFFF MOTOR SRAM
0x33000000 ~ 0x37FFFFFF Unused
0x38000000 ~ 0x38FFFFFF USB CSR & FIFO
0x39000000 ~ 0x390003FF USB PLUG DETECT
0x38000500 ~ 0x3FFFFFFF Unused
0x40000000 ~ 0x4FFFFFFF SDRAM array0 (bank 0)
0x50000000 ~ 0x5FFFFFFF SDRAM array1 (bank 1)
0x60000000 ~ 0x6FFFFFFF SDRAM array2 (bank 2)
0x70000000 ~ 0x7FFFFFFF SDRAM array3 (bank 3)
0x80000000 ~ 0xBFFFFFFF SDRAM array0~4 (Mirror)
0xC0000000 ~ 0xC00007FF MAC
0xC0000800 ~ 0xC0FFFFFF Unused
K4S
16MBYTES (1M * 16BITS * 4Bank * 2)
3-15
Page 16

Circuit Description
3-2-5-1 SDRAM DRAM read timing
Basically the Extended Data Out DRAM is similar to Fast Page Mode DRAM. F or FPM, the data are valid only
when the nCAS is active while reading the internal data, however, it has a latch that the data will be
continuously outputted even after the nCAS is inactivated.
While configuring the software, you must set the timing register of SFR considering the clock speed and the
DRAM spec.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 1 8 19
CLOCK
A10/AP
DQ
CKE
CS
RAS
CAS
ADDR
BA
BA
CL=2
CL=3
HIGH
*Note 1
*Note 2
RAa RBb CAa RCc CBb RDd CCc CDd
0
1
RAa RBb RCc RDd
QAa0 QAa1 QAa2 QBb0 QBb1 QBb2 QCc0 QCc1 QCc2 QDd0 QDd1 QDd2
QAa0 QAa1 QAa2 QBb0 QBb1 QBb2 QCc0 QCc1 QCc2 QDd0 QDd1 QDd2
WE
DQM
Row Active
(A-Bank)
(A-Bank)
Row Active
(B-Bank)
Read
(B-Bank)
Row Acive
(C-Bank)
Read
Precharge
(A-Bank)
(C-Bank)
(D-Bank)
Read
Precharge
(B-Bank)
Read
(D-Bank)
Precharge
(D-Bank)
Precharge
(C-Bank)
: Don't care
* Note : 1. CS can be don’t cared when RAS, CAS and WE are hih at the clock high going dege.
2. To interrupt a burst read by row precharge, both the read and the precharge banks must be the
same.
3-16
Page 17

3-2-5-2 SDRAM write timing
012345678910111213141516171819
CLOCK
Circuit Description
CKE
RAS
CAS
ADDR
BA
BA
A
10
/AP
DQ
CS
HIGH
RAa RBb CAa CBb RCc RDd CCc CDd
0
1
*Note 2
RAa RBb
DAa0 DAa1 DAa2 DAa3 DBb0 DBb1 DBb2 DBb3 DCc0 DCc1 DDd0 DDd1 DDd2
RCc RDd
tCDL
tRDL
WE
*Note 1
DQM
Row Active
(A-Bank)
(A-Bank)
Row Active
(B-Bank)
Write
Write
(B-Bank)
Row Active
(C-Bank)
Row Active
(D-Bank)
(C-Bank)
Write
Write
(D-Bank)
Precharge
(All Banks)
: Don't care
*Note : 1. To interrupt burst write by Row precharge, DQM should be asserted to mask invalid input data.
2. To interrupt burst wrige by Row precharge, both the write and the prechargebanks must be the
same.
3-17
Page 18

Circuit Description
3-2-6 FS781 (FREQUENCY ATTENUATOR)
This system used FS741 for the main clock for EMI SUPPRESSION.
It spreads the source clock in a consistent bandwidth to disperse the energy gathered in order to attenuate
the energy.
The capacitor value of the loop filter(PIN 4) is set depending on the source clock used or the spread bandwidth. Refer to FS781 Spec. for detail.
3-2-7 USB (Universal Serial Bus)
NS’s USBN9602 is used as the interface IC and 48MHz clock is used.
When the data is received through the USB port, EIRQ1 SIGNAL is activated to send interrupt to CPU,
then it directly sends the data to DRAM by IOCS4*&DRAMA(11) SIGNAL through DRAMD (24;31).
3-2-8 SRAM : 1MByte SRAM K6F1008U2C
It stores a variety of option data.
3-2-9 FAX Transceiver
3-2-9-1. GENERAL
This circuit processes transmission signals of modem and between LIU and modem.
3-2-9-2. modem (u44)
FM336 is a single ship fax modem. It has functions of DTMF detection and DTMF signal production as well as
functioins of modem. TX A1, 2 is transmission output port and RX IN is received data input port. / POR signal
controlled by MFP controller (U3:ARM946ES) can initialize modem (/M_RST) without turning off the system.
D0-D7 are 8-bit data buses. RS0-RS4 signals to select the register in modem chips. /RS and /WR signals control READ and WRITE respectively. /IRQ is a signal for modem interrupt.
Transmission speed of FM336 is supported up to 33.6k.
The modem is connected to LINE through transformer directly.
3-18
< FAX TRANSCEIVER >
Page 19

Circuit Description
3-3 Scanner
3-3-1 SUMMARY
This flat-bed type device to read manuscripts has 600dpi CCD as an image sensor. There is one optical sensor for detecting CCD home position and Scan-end position. The home position is detected by a optical sensor which is attached to the CCD Module. The Scan-end position is calculated by numer of motor step.
CCD
Charge Coupled Device improves productivity and allows a compact design.
This machine uses a color CCD.
• Minimum Scan Line Time for One Color : 2.5mSec
• Light Source Power : +18V
• Maximum Pixel frequency : 10MHz
• Effective Sensor Element : 5340 X 3
• Clamp Level : 0.7~ 0.8V
• Bright Output : MIN 0.8V
IRQ
AIN
ADC_REFT
12-bit
A
/D converter
AFE_CIP4
Interrupt
Contro l
CPU I/F
Module
ADC_REFB
SRAM
1024x8
(R/G/B)
SRAM
8192x8
(2line)
PI_TG
PI1
Sensor
Interface
Gamma
Correction
Enlarge men t
/Reduction
Vp eak
Control
CIP4
Register
PI2
Shadi ng
Correction
EXT SRAM
Shading
Acquisition
Imag e
Proces s ing
Module
DMA
Interface
Vertical
Decimation
SRAM
256x8
SRAM
4096x16
(2 line )
Motor
Con tro l
SRAM
1024x8
SRAM_A[ 15:0]
SRAM_D[15:0]
SRA M_nRD
SRA M_nWR
TX_A, B
nT X_A, B
TX_EN1, EN2
A[5:0] D[15:0]nCS nRD nWR nXDREQ nXDACK
<Block Diagram>
3-19
Page 20

Circuit Description
3-3-2 Key Features
view
Over
(1) 0.5µm C-MOS process(TLM), 208-PIN QFP, STD85 library
(2) Frequency : Max PLL 80 MHz
(3) On-Chip oscillator
(4) Method : Raster scanning method
(5) Image Sauce : 300/400/600dpi CIS & CCD
(6) Scanning Mode
• color gray image: each 8 bits / RGB
• mono gray image: 8 bits / pixel
• binary image: 1 bit / pixel (for text/phoot/mixed mode)
(7) Maximum scanning width : A3, 600dpi (8K effective pixels)
(8) Ideal MSLT (A4, 600/300dpi)
• color gray image: 3x5Kx80nsec = 1.2msec (7/28 CPM)
• mono gray image: 1x5Kx80nsec = 0.4msec (21/84 CPM)
• binary image: 1x5Kx80nsec = 0.4msec (21/84 CPM)
(9) A/D conversion depth : 12bits
Pixel processing structure
• Minimum pixel processing time : 4 system clocks
• High speed pipelined processing method
(Shading correction, Gamma correction, Enlargement/Reducement, and Binarization)
Shading Correction
(1) White shading correction support for each R/G/B
(2) White shading data memory : 3x8Kx12bits = 288Kbits 384Kbits (external)
(3) Black shading data memory : 3x8Kx12bits = 288Kbits 384Kbits (external)
Gamma Correction
(1) Independent Gamma table for each RGB component
(2) Gamma table data memory : 3x1Kx8bits = 24Kbits (internal)
Binarization (mono)
(1) 256 Gray’s halftone representation for Photo document : 3x5 EDF(Error DifFusion) method proposed by
Stucki.
(2) LAT(Local Adaptive Thresholding) for Text document :
• use of 5x5 LOCAL WINDOW (TIP ALGORITHM)
• ABC(Automatic Background Control) :Tmin Automatic change
(3) Mixed mode processing for text/photo mixed document
(4) EDF data memory : 2x4Kx16bits = 128Kbits (internal)
(5) LAT data memory : 4x4Kx16bits = 256Kbits (external)
Scaling of input image
(1) Scaling factor
• Horizontal direction: 25 ~ 800% by 1% unit
• Vertical direction: 25 ~ 100% by 1% unit
(2) Scaling data memory : 2x8Kx8bits = 128Kbits (internal)
3-20
Page 21

Circuit Description
Intelligent scan motor controlloer
(1) Automatic acceleration/deceleration/uniform velocity
(2) Data memory : 256x16bits = 4Kbits (internal)
Auto-Run
Automatic CLK_LINE (line processing start control) and •’TG (line scan start control) signal generation|
(1)Available resynchronization of øTG signal
(2) programmable øTG’s period & CLK_LINE’s occurrence number
Processed data output format in DTM(Data Transfer Module)
(1)DMA mode : Burst/On-demand mode
(2) CDIP I/F : LINE_SYNC, PIXEL_SYSNC, PIXEL_DATA[7:0]
36 General Purpose Input/Output : 8(GPO), 28(GPIO)
Black/White reversion, and Image Mirroring support
DATA MEMORY
CPU
SPGPm
ADD R- BUS ADDR- BUS
DATA- BUS
ADDR BUS
DATA B US
Scan/Motor
Driver
DATA- BUS
DMA Controller
(SPGPm
CLK_LINE
CLK_PIX
LINE_PERIOD
IW IN
ADC_CLK
CDS 2_CLK
AFE Co ntrol
Signal
PI_TG
PI1 , PI2
Tx_A, Tx_B,
nTx_A, nTx_B
)
T
T
R
R
D
D
M
M
A
A
_
_
R
A
E
C
Q
K
1M bit
SRAM
Image
Processor
AFE
12b i t A DC
12bit (R/ G/ B)
Analog Sign al
Scanner
CIP4
DOCUMENT IMAGE
<External interfce with CIP4>
3-21
Page 22

Circuit Description
AIN
ADC_REFT
12-bit
A
/D converter
AFE_CIP4
1024x8
(R/G/ B)
8192x8
ADC_REFB
SRAM
SRAM
( 2line)
PI_TG
PI1
Sensor
Interface
Gamma
Correction
Enlarge men t
/Reduc t ion
PI2
Shadi ng
Correction
EXT SRAM
Shading
Acquisition
Imag e
Proces sing
Module
Vertical
Decimation
SRAM_A[15:0]
SRAM_D[15: 0]
SRAM_nRD
SRAM_nWR
SRAM
256x8
SRAM
4096x16
(2 line)
IRQ
Int errupt
Control
CPU I/F
Module
Vp eak
Control
DMA
CIP4
Interface
Register
A[5:0] D[15:0]nCS nRD nWR nXDREQ nXDACK
<Block diagram of CIP4>
Motor
Con trol
SRAM
1024x8
TX_A, B
nTX_A, B
TX_EN1, EN2
3-22
Page 23

Circuit Description
3-4 HOST INTERFACE:
Referred to IEEE 1284 standard.
3-4-1. Host Interface
PARALLEL PORT INTERFACE PART ARM946ES has the Parallel Port Interface Part that enables Parallel
Interface with PC. This part is connected to PC through Centronics connector. It generates major control
signals that are used to actuate parallel communication. It is comprised of/ERROR, PE, BUSY, /ACK,
SLCT, /INIT, /SLCTIN, /AUTOFD and /STB. This part and the PC data transmission method support the
method specified in IEEE P1283 Parallel Port Standard (http://www.fapo.com/ieee1284.html). In other
words, it supports both compatibility mode (basic print data transmitting method), the nibble mode
(4bit data; supports data uploading to PC) and ECP (enhanced capabilities port: 8bits data - high speed
two-way data transmission with PC). Compatibility mode is generally referred to as the Centronics mode
and this is the protocol used by most PC to transmit data to the printer. ECP mode is an improved protocol for the communication between PC and peripherals such as printer and scanner, and it provides
high speed two-way data communication. ECP mode provides two cycles in the two-w ay data transmission; data cycle and command cycle. The command cycle has two formats; Run-Length Count and Channel Addressing. RLE (Run-Length Count) has high compression rate (64x) and it allows real-time data
compression that it is useful for the printer and scanner that need to transmit large raster image that has a
series of same data. Channel Addressing was designed to address multiple devices with single structure. For example, like this system, when the fax/printer/scanner have one structure, the parallel port can be
used for other purposes while the printer image is being processed.This system uses RLE for high speed
data transmission. PC control signals and data send/receive tasks such as PC data printing, high speed
uploading of scanned data to PC, upload/download of the fax data to send or receive and monitoring the system control signal and overall system from PC are all processed through this part.
PPD(7: 0)
BUSY
nSTROBE
nAC
K
DATA
<Compatibility Hardware Handshaking Timing>
3-23
Page 24

Circuit Description
nSTROBE
BUSY
12345 6
PPD(7: 0)
nAUTOFD
BY TE0
DAT A BYTE
<ECP Hardware Handshaking Timing (forward) >
COMM
BY TE1
AND
BY TE
1. The host places data on the data lines and indicates a data cycle by setting nAUTOFD
2. Host asserts nSTROBE low to indicate valid data
3. Peripheral acknowledhes host by setting BUSY high
4. Host sets nSTROBE high. This is the edge that should be used to clock the data into the Peripheral
5. Peripheral sets BUSY low to indicate that it is ready for the next byte
6. The cycle repeats, but this time it is a command cycle because nAUTOFD is low
12 3 4 56
nACK
nAUTOFD
78
PPD
nINIT
(7:0)
BUSY
PE
BYTE0
DATA BYTE
<ECP Hardware Handshaking Timing (forward)
BYTE1
COMM AND BY TE
1. The host request a reverse channel transfer by setting nINIT low
2. The peripheral signals that it is OK to proceed by setting PE low
3. The peripheral places data on the data lines and indicates a data cycle by setting BUSY high
4. Peripheral asserts nACK low to indicate valid data
5. Host acknow ledges by setting nAUTOFD high
6. Peipheral sets nACK high. This is the edge that should be used to clock the data into the host
7. Host sets nAUTOFD low to indicate that it is ready for the next byte
8. The cycle repeats, but this time it is a command cycle because BUSY is low
3-24
Page 25

3-4-2 USB INTERFACE
Circuit Description
RD VVR
CS
Microcontroller Interface
Endpoint/Contol FIFOs
Control
SIE
Media Access Controller[MAC]
Physical Layer interface[PHY]
A0/ALE
D[7:0]/AD[7:0]
Status
RX
TX
INTR
USB Event
MODE[1:0]
48 MHz
Oscillator
Clock
Generator
Clock
Recovery
Detect
RESET
Vcc
GND
XIN
XOUT
CLKOUT
Trans ceiver
D+
D-
Upstream Port
VReg
3-4-2-1 Features
• Full-Speed USB Node Device
• USB transceiver
• 3.3V signal voltage regulator
• 48 MHz oscillator circuit
• Programmable clock generator
• Serial Interface Engine consisting of Physical Layer In-terface (PHY) and Media
• Access Controller (MAC), USB Specification 1.0 compliant
• Control/Status Register File
• USB Function Controller with seven FIFO-based End-points :
• One bidirectional Control Endpoint 0 (8bytes)
- Three Transmit Endpoints (2*32 and 1*64 bytes)
• Three Receive Endpoints (2*32 and 1*64 bytes)
• 8-bit parallel interface with two selectable modes :
- non-multoplexed
• multiplexed (Intel compatible)
• DMA support for parallel interface
• MICROWIRE/PLUS Interface
• 28-pin SO package
V3.3
AGND
3-25
Page 26

Circuit Description
CS
A0
VVR
RD
D[7:0]
DATA_IN
DATA_IN
DATA_OUT
DATA_OUT
ADDR
<Non-Multiplexed Mode Interface Block Diagram>
ADDRESS
0x00
0x3F
REGISTERFILE
cs
A0
RD
VVR
D[7:0]
input
vvrte Address
<Non-Multiplexed Mode Basic Timing Diagram>
out
Read Data
out
Burst Read Data
3-26
Page 27

Circuit Description
3-5 Engine Controller
3-5-1. Fuser Control / Thermistor Circuit
This circuit controls the heat lamp temperature to fix the transferred toner on the paper. It is comprised of the
thermistor that has the negative resistance against the temperature and LM393 (voltage comparator) and
transistor for switching.
The thermistor has the resistance value reverse proportional to the heat lamp surface temperature . The voltage value is read by #60 pin(AVIN2) of CPU refering to the parallel combined resistance with the resistor(R43) connected parallel to it and the voltage distribution of R29. The v oltage read activ ates (inactiv ates)
‘fuser’ signal to high (or low) referring to the set temperature and when the ‘fuseron’ signal turns down(high)
to low(high) by Q3 switching, the S21ME4 inside SMPS (PC3) turns on(off) and this e ventually turns two-way
thyristor(SY1) on(off) to allow(shut) AC voltage to the heat lamp.
LM393 is a H/W designed to protect the system when the software heat lamp control does not run normal.
When the thermistor temperature goes up to 210°C, #1 pin’s level (LM393) will turn low to turn the ‘fuseron’
signal to high. (forcefully shuts off Q3)In other words LM393 shuts off the heat lamp forcefully.
3-5-2. Paper Sensing Circuit
1) Cover Open Sensing
Cover Open Sensor is located on the right rear side of the printer. In case the right cover is open, it
shuts +5V (LSU laser unit) and +24V(main motor, polygon motor of fixer LSU and HVPS) that are
supplied to each unit. It detects the cover opening through CPU. In this case, the red LED of the
OP Panel LED will turn on.
2) Paper Empty Sensing
The paper empty sensor (photo interruptor), located inside bottom of the bin cassette detects paper
with the actuator connected to it and informs the CPU of whether there is paper. When there is no
paper in the cassette, the red LED of the OP panel LED will turn on to tell the user to fill the cassette
with papers.
3) Paper Feeding When the paper is fed into the set and passes through the actuator of the feed sensor
unit, transistor inside the photo interrupter will turn on, ‘nFEED’ signal will turn low and inform CPU that
the paper is currently fed into the system. CPU detects this signal and sprays video data after certain
time (related to paper adjustment). If the paper does not hit the feed sensor within certain time, CPU
detects this and informs as “Paper Jam0” (red LED on the OP panel will turn on).
4) Paper Exit Sensing
The system detects the paper going out of the set with the exit sensor assembled to the actuator
attached to the frame. If CPU does not turn back high a while after the paper hits the exit sensor, CPU
detects this and inform as “Paper Jam2” (red LEDs on the OP panel will turn on).
3-27
Page 28

Circuit Description
3-5-3. LSU Circuit
1) Polygon Motor Unit (actuated by +24V)
The polygon motor inside LSU rotates by the ‘PMOTOR’ signal. When it reaches the motor constant
velocity section through the initial transient (transient response) section, it sends the ‘nLREADY’ signal
to the CPU.
The ‘clock’ pin is the pin that receives clock of the required frequency when LSU uses external CLK as
the motor rotational frequency. Currently the e xternal clock circuit is located in the HVPS and 1686Hz
= 6.9083MHz (crystal frequency)÷212(74HC4060N IC), is used as the rotational frequency of the
polygon motor.
2) Laser Unit (actuated by +5V)
After laser is turned on by ‘nLD_ON’ signal, it is reflected by 6 mirrors (polygon mirror) attached to
the polygon motor and performs scan in horizontal way.When the laser beam hits the corner of the
polygon mirror, it generates ‘nHSYNC’ signal (pulse) and the CPU forms the left margin of the image
using this signal (horizontal synchronous signal).
3-5-4. Fan/Solenoid Actuation Circuit
The fan actuation circuit its power using NPN TR. When it receiv es ‘FAN’ signal from the CPU . The TR will turn
on to make the voltage supplied to the fan to 24V in order to actuate the fan.
The solenoid is actuated in the same way. When it receives control signal from the CPU, the solenoid for
paper feeding is actuated by switching circuit.
D29(1N4003) diode is applied to the both ends of the output terminal to protect Q22(KSC1008-Y) from
noise pulse induced while the solenoid is de-energized.
3-5-5. PTL Actuation Circuit
PTL actuation circuit switches its power using NPN TR.
3-5-6. Motor Actuation Circuit
Motor actuation circuit is determined while selecting the initial driver IC (provided by the vendor). This system uses TEA3718(U57, U58), A2918(U59)’s motor driver IC. Howev er, the sensing resistance (R273, R274,
R292, R293) and reference resistance (R284, R289, R294, R295) can vary depending on the motor actuation current value.
It receives motor enable signal (2 phase) from CPU and generates bipolar pulse (constant-current) and
sends its output to stepping motor input.
3-28
Page 29

Circuit Description
3-5-7. High Voltage Power Supply
3-5-7-1. Summary
It is the high voltage power supply that has DC+24V/DC+5V (used for the image forming device in OA digital picture developing method) as the rated inputs. It supplies electrifying voltage (MHV), supply voltage
(SUPPLY), developing voltage (DEV), blade voltage(BLADE) and transferring voltage (THV).
Each high voltage supply shows the voltage required in each digital picture process.
3-5-7-2. Digital Picture Process
Digital picture developing method is widely used by copy machine, laser beam printer and fax paper.
The process is comprised of electrification, exposure, develop, transfer and fixing.
BLADE
LSU
MHV
SUPPLY
DEV
SUPPLY ROLLER
HEAT ROLLER
PRESSURE ROLLER
ELECTRIFICATION
ROLLER
TRANSFER ROLLER
DEVELOPER ROLLER
DIRECTION OF PAPER
THV
First, in the electrification process, retain constant charge at approx. -900V for the electric potential on the
OPC surface by electrifying OPC drum at approx. -1.4KV through the electrification roller.
The electrified surface of OPC is exposed responding to the video data by the LSU that received print command due to rotation. The unexposed non-video section will retain the original electric potential of -900V, but
the electric potential of the image area exposed by LSU will be approx. -180V that it will form the electrostatic latent image. The surface of the photo-conductive drum where the electrostatic latent image is
formed reaches the developer as the drum rotates. Then the electrostatic latent image formed on the OPC
drum is developed by the toner supplied to the developing roller by supplying roller and it is transformed into
visible image. It is the process to change the afterimage on the OPC drum surface formed by LSU into visible image by the toner particles.
While the supply roller energized with -450V by HVPS and the developer roller energized with -300V
rotate in the same direction, it keeps the toner particles between two rollers supplied to OPC drum in negative state by the friction between two rollers.
The toner supplied to the developer roller is biased to bias electric potential by the developer roller and
transferred to the de veloping area. After (-) toner is attached to the dev eloper roller, it will move to the e xposed
high electric potential surface (-180V) rather than to the unexposed low electric potential surface (-900V) of
the developer roller and OPC drum. Eventually the toner will not settle in the low electric potential surface to
form the visible image.
Later, the OPC drum continues to rotate and reaches to transf er location in order to accomplish the tr ansf er
process.
This process transfers the (-)toner on the transfer roller to the printing paper by the transfer roller. The ()toner attached to the OPC drum will be energized to hundreds to thousands of the (+)transfer voltage by
HVPS. The (+)electrostatic force of the transfer roller generated has higher adhesiveness than the (-)toner
OPC drum and thus it moves to the surface of the paper passing through the transfer roller.
The toner transferred to the paper with weak electrostatic force is fixed to the paper by the pressure and heat
of the fixer composed of pressure roller and heat roller.
The toner attached to the paper is melted by applying the heat (approx. 180°C) from the heat roller and the
pressure (approx. 4kg) from the pressure roller. After the fixing process, the paper is sent out of the set to
finish the printing process.
3-29
Page 30

Circuit Description
3-5-7-3. Organization of the Device
HVPS is comprised of electrification output unit, bias output unit and transfer output unit.
1) Input Unit
2) Electrification Output (Enable) Unit: MHV (Main High Voltage)
3) Bias Output (Enable) Unit: DEV (Development Voltage)/Supply(Supply Voltage)/BLADE(Blade Voltage)
4) Transfer ‘+’ Output (Enable) Unit: THV(+)(Transfer High Voltage(+))
5) Transfer ‘-’ Output (Enable) Unit: THV(-)(Transfer High Voltage(-))
6) Switching Unit
7) Feedback Unit
8) Regulation Unit
9) Output Unit
MHV-PWM
THVPWM
THVEA
SWITCHING
CONTROL UNIT
PWM
CONTROL UNIT
SWITCHING
CONTROL UNIT
TRANS
REGULATION
CIRCUIT
<Electrification Unit Block-Diagram>
SWITCHING
CONTROL UNIT
FEEDBACK
TRANS
TRANS
REGULATION
CIRCUIT
OUTPUT
CIRCUIT
REGULATION
CIRCUIT
MHV
THV
3-30
THVREAD
THV
ENVIRONMENT
RECOGNITION
CIRCUIT
FEED BACK
<Transfer Output Unit Block Diagram>
Page 31

Circuit Description
MHV-PWM
BIAS-PWM
PWM
CONTROL UNIT
PWM
CONTROL UNIT
SWITCHING
CONTROL UNIT
FEEDBACK
TRANS
<MHV Output unit Block Diagram>
SWITCHING
CONTROL UNIT
FEEDBACK
TRANS
<BIAS Output Unit Block Diagram>
REGULATION
CIRCUIT
REGULATION
CIRCUIT
MHV
OPC
BLADE
SUPPLY
DEV
3-31
Page 32

Circuit Description
3-5-7-4 MHV (Electrification Output Enable)
Electrification Output Enable is the electrification output control signal 'PWM-LOW ACTIVE'.
When MHV -PWM LOW signal is received, Q401 turns on and the steady voltage will be accepted to the noninverting terminal of OP-AMP 324. As the voltage higher than the inverting reference voltage of OP-AMP,
which is set to R405 and R406, OP-AMP output turns high. This output sends IB to the TRANS auxiliary
wire through current-restricting resistance Q402 via R408 and C403 and Q402 turns on. When the current
is accepted to Q402, Ic increases to the current proportional to time through the T401 primary coil, and when
it reaches the Hfe limit of Q402, it will not retain the "on" state, but will turn to "off". As Q402 turns 'off',
TRANS N1 will have counter-electromotive force, discharge energy to the secondary unit, sends current to
the load and outputs MHV voltage through the high voltage output enab le , which is comprised of Regulation– circuit.
MHV-PWM
U103 7407
R412 2.2K
R411 2K
18V
Q401 A708
R403 130K
R402
82K
R404
27K
C407
104
R405 220K
R406
2.2K
24VS
Q402
R408
47K
D526
R409
390
C403
333
24VS
+
_
KA324
T401
C404
3K/471
D402
4KV
C406
3K/471
R416
15M
R417
15M
MHV OUTPUT
R413
12M
ZD401
150V
OPC
3-5-7-5 BIAS (supply/dev/blade output unit)
BIAS (Electrification Output Enable)Electrification Output Enable is the electrification output control signal
‘PWM-LOW ACTIVE’.When BIAS-PWM LOW signal is received, Q501 turns on and the steady voltage will
be accepted to the non-inverting terminal of OP-AMP 324. As the voltage higher than the inverting reference
voltage of OP-AMP, which is set to R506 and R507, OP-AMP output turns high. This output sends IB to
the TRANS auxiliary wire through current-restricting resistance Q502 via R509 and C504 and Q502 turns
on. When the current is accepted to Q502, Ic increases to the current proportional to time through the T201
primary coil, and when it reaches the Hfe limit of Q502, it will not retain the “on” state , but will turn to “off”.
As Q502 turns ‘off’, TRANS N1 will hav e counter-electromotiv e f orce , discharge energy to the secondary
unit, sends current to the load and outputs DEV voltage through the high voltage output enab le, which is
comprised of Regulation-circuit.
3-32
BIAS-PWM
CON03-#24
24VS
T201
KAB-007
R511
1W 3
1
5
2
4
5V
C503
R520
26K
U103-A
7407
R508
104
R507
12KF
47K
5
_
7
U1
+
6
U101-B
KA324
R504
56.6KF
C501
104
C502
222
R506
86.6KF
R501
100
2
R519
2.2K
R502
2K
Q501
A708-Y
R503
100KF
R509
47K
R510
430
C504
333
Q502
D526-Y
7
6
C505
2KV 680
D502
4KV
C506
3KV 471
ZD501
100V
R512
MGR1/2W 12MF
R514
MGR1/2W 50K
R515
MGR1/2W 50K
ZD501
100V
R516
MGR1/2W 50K
BLADE
SUPPLY
DEV
Page 33

Circuit Description
3-5-7-6. THV(THV(+)/THV(-) Output Unit)
Transfer(+) output unit is the transfer output control signal 'PWM-LOW ACTIVE'.
When THV-PWM LOW signal is received, Q203 turns on and the steady voltage will be accepted to the noninverting terminal of OP-AMP 324. As the voltage is higher than the inverting reference voltage of OP-AMP,
OP-AMP output turns high.
The 24V power adjusts the electric potential to ZD201 and ZD202, sends IB to TRANS auxiliary wire
through current-restricting resistance R215 via R212 and C204, and eventually Q204 will turn on. When
the current is accepted to Q402, Ic increases to the current proportional to time through the T201 primary coil,
and when it reaches the Hfe limit of Q204, it will not retain the "on" state, but will turn to "off". As Q402 turns
'off', TRANS N1 will ha ve counter-electromotive force, discharge energy to the secondary coil, sends current to the load and outputs THV voltage through the high voltage output enable, which is comprised of
Regulation– circuit. The output voltage is determined by the DUTY width. Q203 switches with PWM DUTY
cycle to fluctuate the output by fluctuating the OP-AMP non-inverting end VREF electric potential, and the
maximum is output at 0% and the minimum, at 100%.Transfer(-) output unit is THV-EA 'L' enable.
When THV-EA is 'L', Q302 turns on and the VCE electric potential of Q302 will be formed and sends IB to
TRANS auxiliary wire through R311, C305 and VR302 via current-restricting resistance R314, and eventually Q303 will turn on. When the current is accepted to Q303, Q303's Ic increases to the current proportional
to time through the T301 primary coil, and when it reaches the Hfe limit of Q303, it will not retain the "on" state,
but will turn to "off". As Q303 turns 'off', TRANS N1 will have counter-electromotive force, discharge
energy to the secondary coil, send current to load and output THV(-) voltage through the high voltage output
enable, which is comprised of Regulation– circuit.
#7 TEV-PWM
#17
5V
#19
TEV-EA
#5
#24
TEV-READ
5V
U2
12
24VS
+
C101
35V47
R201
10K
3
R205
1.8K
18V
U2
R206
100
R208
Q203
30K
A708Y
R207
2K
UF
5V
5
6
U2
7
7407
D-GND
8
KA324
R301
470K
U1
C301
222
24VS
+
_
R209
100KF
VR201
50K
10
C202
C201
121
103
C4
103
R302
R303
9
33K
100KF
C302
102
R210
845KF
D301
1N4148
D302
1N4148
D201
1N4148
D202
1N4148
C303
103
R211
1MF
R304
389KF
R305
10KF
VR301
5K
24VS
5
+
_
6
11
R212
680K
R306
26.1KF
C304
500V103Z
U1
KA324
C203
472
R307
33K
R308
33K
T201
KAB-007
1
R215
390
KAB-006
T301
1
5
2
4
5
2
4
6
7
7
R213
D203
1N4148
R309
202K
R310
2.2K
2.2K
ZD201
ZD202
5.65V
705V
18V
Q301
A708Y
18V
Q302
A708Y
R311
100KF
C305
333Z
R214
2.2K
R312
1W56
R313
1W56
VR302
2K
Q303
D526
C204
333Z
Q204
D526
R314
1.7K
C206
6KV470pF
7
C205
2KV68pF
6
C307
D304
3KW470pF
4KV
D303
C306
4KV
2KV68pF
C207
3KV470pF
R216
SBR306
D204
6KV
D205
6KV
R217
SBR207
C308
3KV470pF
C208
6KV
R218
MGR1/2W100KF
R315
SBR306
D206
6KV
C209
6KV
D207
6KV
3-33
Page 34

Circuit Description
3-5-7-7. Environment Recognition
THV voltage recognizes changes in transfer roller environment and allows the voltage suitable for the environment in order to realize optimum image output. The analog input is converted to digital output by the
comparator that recognizes the environmental changes of the transf er roller . It is to allow the right transf er
voltage to perform appropriate environmental response considering the environment and the type of paper
depending on this digital output by the programs that can be input to the engine controller ROM.
This environment recognition setting is organized as follows: First, set the THV(+) standard voltage.
Allow 200MΩ load to transfer output, enable output and set the standard voltage 800V using VR201.
Then set 56 (CPU's recognition index value) as the standard using VR302.
This standard value with CPU makes sure that the current f eedback is 4µA when output v oltage is 800V and
load is 200MΩ.
If the load shows different resistance value when 800V is output, the current feedback will also be different
and thus the index value will also be diff erent. according to the index v alue read b y CPU , the tr ansf er v oltage
output will differ according to the preset transfer table.
The changes in transfer output required by each load is controlled by PWM-DUTY.
3-34
Page 35

Circuit Description
3-6 OPE PBA
3-6-1 SUMMARY
OPE Board is separated functionally from the main board and operated by the micom(HT48R50) in the board.
OPE and the main use UART (universal asynchronous receiver/transmitter) channel to
exchange information. OPE reset can be controlled by the main. OPE micom controls key-scanning and LCD
and LED display. If there occurs an event in OPE (such as key touch), it sends specific codes to the main to
respond to the situation and the main analyzes these codes and operates the system. For example, it the
main is to display messages in OPE, the main transmits data through UART line to OPE according to the
designated format and OPE displays this on LCD, LED . OPE’s sensing is also tr ansmitted to the main through
UART line and then the main drives necessary operation.
OPE PBA consists of U1(MICOM, HT48R50),LCD, key matrix, LED indicators. Refer to OPE Schematic
Diagram and Wiring Diagram sections of this manual.
• Signals from the key matrix are delivered to U1 input pin group (D1~D6)
• U1 pin 48 (TX DATA) is the UART code sent to MAIN PBA.
• Display from the controller is received at U1 pin 5(RX DATA).
• LCD drive signals are sent from U1 P2-x pin group, P3-4~P3-6 pins.
• Machine status LED drive signals are sent from U1 LED0~LED7.
Connector
UART
Reset
MICOM
HT48R50
<OPE BLOCK DIAGRAM>
RESONATOR
7.37 MHz
11
LCD
16 2line
7
X
Y
8
Key Matrix
LEDs
3-35
Page 36

Circuit Description
3-7 LIU PBA
3-7-1. SUMMARY
LIU WIRE CONNECTS Main B’D’s MODEM AND LINE PARTS, AND IMPEDANCE MATCHING (AC, DC),
RING DETECTION PART and LINE SEIZURE (DIALER).
3-7-2. DC MATCHING PART
Normal movement range of LIU is 12mA ~ 9mA.
Adapting CTR21 standard, the regulation limits to 60mA CURRENT flow through the terminal.
Therefore, select (*:for EU PIT) Option to connect necessary items then the current through LIU will not
exceed 60mA.
• CTR21 Standard(Europe) : 12mA~60mA • OTHER Standard (U.S.) : 12mA~90mA
DC has a character to pass through the LINE. And with Q1 (VN2410) GATE section’s LINE INPUT corrent
and Q1 Source connection to R20, can be decided as follows :
• -VDCR = VL1 + ILINE X R20
(VDCR : Tip-Ring CD Voltage, ILINE :
Current flow)VL1:Line Input Voltage, VL1=VBD1+VCE(Q2)+VDS(Q1)
3-7-3. AC MATCHING PART
Basic LIU’s AC IMPEDANCE is 600 and uses R47. 48. C36 to possibly control combined IMPEDANCE.
• U.S. Usage : A terminal IMPEDANCE Æ 600W(±30%)
• CTR21 : A Terminal IMPEDANCE Æ 270+750W//150nF
3-7-4. DIALER PART
*MF DIAL
DTMF Dialing is controlled by MODEM and should be selected by appropriate LEVEL and On-off Time output
based on each countries’ own National specification.
• Freq. Tolerance : ±1.5%
High Group : 1209, 1336, 1477, 1633Hz
Low Group : 697, 770, 852, 941 Hz
U.S. Usage CTR21
High Freq Level -9.0+2.0/-2.5 -7.0 +1.0/-2.0
Low Freq Level -9.0+1.0/-2.0 -11.0+2.5/-2.0
*DP DIAL
Controls from MAIN through / DP-Terminal.
for U.S.Usage, set time to DF signal of 40:60 M/B. DP signal is made of U6 (pcb817). The DC current which
flows thru Q2 Base is regulated by On/Off switch and turns to DP dial signal with a COUPLER.
• CTR 21 does not have telephone capability but has the number 3 and 4 Line Connection. No DP condition
but possibility to get approval only on DTMF Dial based terminal.
3-7-5. RING DETECTION PART
RING SIGNALS from the LINE section (TIP, RING)are further passed through C5, R3, ZD1, and ZD2 and
ends up at U9, (PC 814). U9 then detects abo v e RING SIGNAL and passes the output to MAIN B’D. The wilre
diagram’s C5 is RINGER CAPACITOR and it normally uses 1UF/250V.
A R3 limits AC current and controls upper and lower REN meter.
3-36
Page 37

Circuit Description
3-8 SMPS (Switching Mode Power Supply) Unit.
3-8-1 SMPS Specifications
The SMPS (Switching Mode Power Supply) Unit used here is a PWM (Pulse Width Modulation) type power
supply unit that supplies DC+5V to controller and control panel, and DC+5V, DC+24V and DC+12V to the
engine. It also supplies AC power to fixer heat lamp.
No. Output Channel Ch.1 Ch.2 Ch.3
Channel Name +5.1V +24.0V +12.0V
1
Rated Output Voltage +5.1V +24.0V +12.0V
2
Rate Output Current 2A 2.5A 0.8A
3
Maximum Load Current
4
and Load Pattern
Load Change Range 0.5~2.0A 0.1~0.3A 0.1~0.8A
5
Rate output voltage
6
(For rated I/O)
1) Total Output Voltage
Deviation
7
(Input, Load, Temp., Aging)
2) Dynamic Input Change
3) Dynamic Load Change
Refer to ripple & noise 27 150mVp-p or less 500mVp-p or less 200mVp-p or less
8
Refer to load short and
overload protection 23
9
Refer to load short and
overload protection 23
2.5A Continued 3.0A Continued 0.8A Continued
+5.1V±5%
(+4.84~+5.35V)
Including All
+5.1V±5%
(+4.84~+5.35V)
Including Set Error
Must not ignite or
generate smoke
when output shorted
for 5 sec.
+24.0V±10%
(+21.60~+26.40V)
Including All
+24.0V±10%
(+21.60~+26.40V)
Including Set Error
Output voltage must
shutdown withing
the range of
3.5A~6.5A
+12V±5%
(+11.40~+12.60V)
Including All
+12V±5%
(+11.40~+12.60V)
Including Set Error
Must not ignite or
generate smoke
when output shorted
for 5 sec.
3-37
Page 38

Circuit Description
3-8-2 AC Input Stage
AC Input power path is consist of the Fuse (F1) for AC current limit, the Varistor (TNR1) for by-passing high
Voltage Surge, the discharge resistor(R1), the AC Impalse Noise Filtering Circuit (C2, C4, LF1), the Common
Mode Grounding Circuit (C5, C6), the 2’nd noise filter (C7, LF2), and the thermistor (TH1).
Wher power is turned on, TH 1 limits Inlush-Current b y it’s high resistanle, and When it’s temperature rise, it’s
resistance become about Zero ohm.
3-8-3 SMC(Switched Mode Control)
The AC input voltage is rectified and filtered by BD1 and C10 to create the DC high voltage applied to the primary winding of T1, Q5 pin #1 is driven by the SMPS device IC2, IC2. auto-starts and chops the DC voltage.
The U502 is PWM SMPS IC and has internally a SMC(switched mode control) IC and a MOSFET output
stage. The SMC IC has a Auto-restart without a Power Supply for the IC and a Thermal Shutdown function
and so on. R4, R5, C11, D1 clamp leading-edge voltage spikes caused by transformer leakage inductance.
The power secondary winding(Pin #5~6)is rectified and filtered by D8, D9, L2, C33, C34 to create the 5V output voltage. The bias winding(Pin #9~8)is rectified and filltered by D2 and C12 to create U502 bias voltage.
The secondary output 5V is regulated through the path of the voltage divide by R34, R35.
3-8-4. Fixed Temperature Control
3-8-4-1. Fixed Lamp Control Circuit
AC Neutral
C18
CON502
R23
SY1
R24
AC Power Live
L1
Zero crossing circuit
4
6
PC3
Logic Unit
Fuser On
2
R66
1
SMPS Unit
DC Power
3-38
<Fixed Lamp Control Circuit>
Page 39

Circuit Description
3-8-4-2. The Concept of Fixed Lamp Control
For fix ed lamp control, the logic unit "fuser on" control signal and SMPS unit DC power must be supplied.
This circuit turns on only when "fuser on" sends the signal and the DC power is supplied.
The following explains how the fixed lamp control circuit works.
logic unit "fuser on" sends trigger current to triac driver PC3 LED, then the infrared ray is detected by PC3
photo detector. Next, YC3 triac is conducted.
The conducted current sends trigger input to triac SY1 gate. At this point, SY1 is conducted and AC power
is supplied to fixed lamp. Lamp is turned on and temperature rises.
As this fixed lamp control circuit uses the AC voltage ("+" and "-" are repeated) as the power supply, it used
two-way triac (SY1), which has advantage over one-way SCR considering the price, size and reliability.
Triac's gate can be triggered by either forward or reverse signal. Once triac is turned on, it will not be controlled by gate signal, but will be continuously on until the current between major terminals decreases below
the holding current. In other words, you cannot turn it off with reverse signal unlike SCR. This property is called current-voltage threshold rise rate (commutation: dv/dt). In AC power control
application, triac has to turn off conduction in each zero crossing or switch it twice in each cycle. This switching operation is called commutation. It is possib le to turn off the triac at the end of half cycle by eliminating the
gate signal when the load current (IL) is gained at the level equal to or lower than holding current. When
triac commutes off-line, the direction of the voltage of the both ends of triac will be rev ersed and increase
up to the maximum value of line voltage (VAC). At this point, the width of rise rate will be determined by dv/
dt and overshoot voltage, by the circuit. When triac commutes off-line, the voltage of both ends of triac will
have the same voltage as the line voltage.
VAC
Inductive IL
<Inductive Circuit>
IL
T
V
G
3-39
 Loading...
Loading...