

S7 300 Service Manual
_
_
_
_
_
_
_
SIMATIC S7-300 SIMATIC S7-300 CPU 31xC Funciones tecnológicas
Prólogo
SIMATIC
S7-300
CPU 31xC Funciones tecnológicas
Instrucciones de servicio
Resumen de las funciones
tecnológicas
_____________
Posicionamiento
_____________
Posicionamiento con salida
analógica
_____________
Posicionamiento con salidas
digitales
_____________
Contaje, medición de
frecuencia y modulación de
_____________
ancho de pulso
Acoplamiento punto a punto
_____________
Regulación
_____________
1
2
3
4
5
6
7
02/2007
A5E00105486-04
Consignas de seguridad
Este manual contiene las informaciones necesarias para la seguridad personal así como para la prevención de
daños materiales. Las informaciones para su seguridad personal están resaltadas con un triángulo de
advertencia; las informaciones para evitar únicamente daños materiales no llevan dicho triángulo. De acuerdo al
grado de peligro las consignas se representan, de mayor a menor peligro, como sigue.
Peligro
Significa que, si no se adoptan las medidas preventivas adecuadas se producirá la muerte, o bien lesiones
corporales graves.
Advertencia
Significa que, si no se adoptan las medidas preventivas adecuadas puede producirse la muerte o bien lesiones
corporales graves.
Precaución
con triángulo de advertencia significa que si no se adoptan las medidas preventivas adecuadas, pueden
producirse lesiones corporales.
Precaución
sin triángulo de advertencia significa que si no se adoptan las medidas preventivas adecuadas, pueden
producirse daños materiales.
Atención
significa que puede producirse un resultado o estado no deseado si no se respeta la consigna de seguridad
correspondiente.
Si se dan varios niveles de peligro se usa siempre la consigna de seguridad más estricta en cada caso. Si en una
consigna de seguridad con triángulo de advertencia se alarma de posibles daños personales, la misma consigna
puede contener también una advertencia sobre posibles daños materiales.
Personal cualificado
El equipo/sistema correspondiente sólo deberá instalarse y operarse respetando lo especificado en este
documento. Sólo está autorizado a intervenir en este equipo el personal cualificado. En el sentido del manual se
trata de personas que disponen de los conocimientos técnicos necesarios para poner en funcionamiento,
conectar a tierra y marcar los aparatos, sistemas y circuitos de acuerdo con las normas estándar de seguridad.
Uso conforme
Considere lo siguiente:
Advertencia
El equipo o los componentes del sistema sólo se podrán utilizar para los casos de aplicación previstos en el
catálogo y en la descripción técnica, y sóloassociado a los equipos y componentes de Siemens y de tercera que
han sido recomendados y homologados por Siemens. El funcionamiento correcto y seguro del producto
presupone un transporte, un almacenamiento, una instalación y un montaje conforme a las prácticas de la buena
ingeniería, así como un manejo y un mantenimiento rigurosos.
Marcas registradas
Todos los nombres marcados con ® son marcas registradas de Siemens AG. Los restantes nombres y
designaciones contenidos en el presente documento pueden ser marcas registradas cuya utilización por terceros
para sus propios fines puede violar los derechos de sus titulares.
Exención de responsabilidad
Hemos comprobado la concordancia del contenido de esta publicación con el hardware y el software descritos.
Sin embargo, como es imposible excluir desviaciones, no podemos hacernos responsable de la plena
concordancia. El contenido de esta publicación se revisa periódicamente; si es necesario, las posibles las
correcciones se incluyen en la siguiente edición.
Siemens AG
Automation and Drives
Postfach 48 48
90437 NÜRNBERG
ALEMANIA
Referencia A5E00105486-04
Ⓟ 02/2007
Copyright © Siemens AG 2007.
Sujeto a cambios sin previo aviso
Consignas de seguridad
Prólogo
Finalidad del manual
Este manual ofrece una visión muy completa sobre las funciones tecnológicas integradas de
la CPUs 31xC.
El manual está dirigido a aquellas personas encargadas de realizar tareas de
automatización con funciones tecnológicas destinadas a los sistemas de automatización
SIMATIC.
Conocimientos básicos requeridos
Para comprender este manual se requieren conocimientos generales en materia de
automatización.
Ámbito de validez del manual
Este manual es válido para CPUs con las siguientes versiones de hardware y software:
Número de referencia
en este manual, las CPUs
reciben la siguiente
denominación:
CPU 312C 6ES7312-5BD01-0AB0 V2.0.0 01
CPU 313C 6ES7313-5BE01-0AB0 V2.0.0 01
CPU 313C-2 PtP 6ES7313-6BE01-0AB0 V2.0.0 01
CPU 313C-2 DP 6ES7313-6CE01-0AB0 V2.0.0 01
CPU 314C-2 PtP 6ES7314-6BF01-0AB0 V2.0.0 01
CPU 314C-2 DP
CPU 31xC
6ES7314-6CF01-0AB0 V2.0.0 01
A partir de la versión: CPU Convención:
Firmware Hardware
Nota
El presente paquete de documentación incluye la descripción de los módulos actuales hasta
la fecha de publicación de dichos manuales.
Nos reservamos el derecho de describir nuevos módulos o módulos con nueva versión en
una información del producto que se adjunta a los mismos.
CPU 31xC Funciones tecnológicas
Instrucciones de servicio, 02/2007, A5E00105486-04
3

Prólogo
Modificaciones respecto a la versión anterior
A partir de las versiones indicadas en la tabla, la CPU 31xC incluye nuevas funciones:
Submódulo de contaje:
• En el modo de operación Contaje, el valor actual de contaje se puede leer accediendo
directamente mediante la dirección de entrada del submódulo contaje.
• En el modo de operación Medida de frecuencia, el valor actual de medición de frecuencia
se puede leer accediendo directamente por la dirección de entrada del submódulo
contaje.
• En los modos de operación Contaje y Medida de frecuencia, la frecuencia máxima de
contaje de las señales Pista A/impulso, Pista B/impulso y puerta HW puede graduarse de
forma escalonada.
• En el modo de operación Modulación del ancho de pulso, la frecuencia máxima de la
señal de puerta HW puede graduarse de forma escalonada.
• En el modos de operación Contaje, la frecuencia máxima de la señal de latch (congelar)
puede graduarse de forma escalonada.
Submódulo de posicionamiento:
• Al posicionar tanto con salidas digitales como con salida analógica, la frecuencia máxima
de contaje de las señales de lectura de recorrido (señales A, B, N) pueden graduarse de
forma escalonada.
• En el posicionamiento con salidas digitales y también con salida analógica, la frecuencia
máxima de las señales de medida de longitud y del sensor del punto de referencia puede
graduarse de forma escalonada.
• En el posicionamiento con salida analógica, se dispone, además del control de
accionamiento con una intensidad de +/-10V
(+/-20mA), de un segundo tipo de accionamiento con 0...10V (0...20mA), así como de
una señal de sentido adicional.
CPU 31xC Funciones tecnológicas
4 Instrucciones de servicio, 02/2007, A5E00105486-04
Prólogo
Ubicación en el paquete de documentación
El presente manual forma parte del paquete de documentación de la CPU 31xC.
Manual de referencia/Manual de producto
• Sistema de automatización S7-300
Datos de las CPU 312 IFM a 318-2 DP
• Sistema de automatización S7-300
CPU 31xC y CPU 31x, Datos técnicos
Manual
• Sistema de automatización S7-300
CPU 31xC Funciones tecnológicas
(→ Está leyendo este manual)
• CD-ROM: "Ejemplos"
Manual de instalación / Instrucciones de servicio
• Sistema de automatización S7-300
Configuración: CPU 312 IFM -- 318-2 DP
• Sistema de automatización S7-300
Configuración: CPU 31xC y CPU 31 x
Manual de referencia
• Sistema de automatización S7-300
Datos de los módulos
Lista de operaciones
• Sistema de automatización S7-300
Datos de las CPU 312 IFM a 318-2 DP
• Sistema de automatización S7-300
CPU 31xC y CPU 31x, IM 151-7 CPU, BM 147-1 CPU,
BM 147-2 CPU
Getting Started
• Sistema de automatización S7-300
Getting Started Collection
Las siguientes guías "Getting Started" están disponibles:
• CPU 31x: Puesta en servicio
• CPU 31xC: Puesta en servicio
• CPU 314C: Posicionamiento con salida analógica
• CPU 314C: Posicionamiento con salida digital
• CPU 31xC: Contaje
• CPU 31xC: Acoplamiento punto a punto
• CPU 31xC: Regulación
• CPU 315-2 PN/DP, 317-2 PN/DP y 319-3 PN/DP:
Configuración de la interfaz PROFINET
Descripción de las funciones, la estructura y los datos
técnicos de la CPU.
Descripción de las diferentes funciones tecnológicas:
• Posicionamiento
• Contaje
• Acoplamiento punto a punto
• Regulación
El CD contiene ejemplos de las funciones tecnológicas.
Descripción de la configuración, el montaje, el cableado, la
interconexión y la puesta en servicio de un S7-300.
Descripción de las funciones y datos técnicos de los
módulos de señales, de alimentación y de interfaz.
Relación del repertorio de operaciones de las CPU y sus
tiempos de ejecución.
Relación de los bloques ejecutables (OB/SFC/SFB) y sus
tiempos de ejecución.
Utilizando un ejemplo concreto, las guías "Getting Started"
le conducen paso a paso por el proceso de puesta en
marcha hasta obtener una aplicación apta para funcionar.
CPU 31xC Funciones tecnológicas
Instrucciones de servicio, 02/2007, A5E00105486-04
5

Prólogo
Asistencia complementaria
Si tiene preguntas relacionadas con el uso de los productos descritos en el manual a las que
no encuentre respuesta, diríjase a la sucursal o al representante más próximo de Siemens,
en donde le pondrán en contacto con el especialista.
Encontrará a su interlocutor en:
http://www.siemens.com/automation/partner
Encontrará toda la gama de ofertas de documentación técnica para los diferentes productos
y sistemas SIMATIC en:
http://www.siemens.de/simatic-tech-doku-portal
Encontrará el catálogo online y el sistema de pedidos online bajo:
http://mall.automation.siemens.com/
Centro de formación
Para ofrecer a nuestros clientes un fácil aprendizaje de los sistemas de automatización
SIMATIC S7, les ofrecemos distintos cursillos de formación. Diríjase a su centro de
formación regional o a la central en D 90327 Nuernberg.
Teléfono: +49 (911) 895-3200.
Internet: http://www.sitrain.com
Technical Support
Puede dirigirse al servicio de asistencia técnica de todos los productos A&D:
• a través del formulario web para el Support Request
http://www.siemens.de/automation/support-request
• Teléfono: + 49 180 5050 222
• Fax: + 49 180 5050 223
Encontrará más información sobre nuestro Technical Support en la dirección de Internet
http://www.siemens.de/automation/service
Service & Support en Internet
Además de la documentación disponible, en Internet le ofrecemos todo nuestro saber.
http://www.siemens.com/automation/service&support
En esta página encontrará:
• "Newsletter" que le mantendrán siempre al día ofreciéndole informaciones de última
hora,
• La rúbrica "Servicios online" con un buscador que le permitirá acceder a la información
que necesita,
• El "Foro" en el que podrá intercambiar sus experiencias con cientos de expertos en todo
el mundo.
• La persona de contacto de Automation & Drives de su localidad.
• Información sobre servicio técnico, reparaciones y recambios en su región. servicio
técnico más próximo, sobre reparaciones, repuestos etc.
CPU 31xC Funciones tecnológicas
6 Instrucciones de servicio, 02/2007, A5E00105486-04

Índice
Prólogo ...................................................................................................................................................... 3
1 Resumen de las funciones tecnológicas.................................................................................................. 15
2 Posicionamiento ...................................................................................................................................... 17
2.1 Tipos admitidos de posicionamiento controlado..........................................................................17
2.1.1 Posicionamiento controlado con salida analógica.......................................................................17
2.1.2 Posicionamiento controlado con salidas digitales .......................................................................18
2.2 Generalidades sobre el posicionamiento.....................................................................................19
2.3 Funcionalidad...............................................................................................................................20
2.4 Componentes para el posicionamiento controlado......................................................................21
3 Posicionamiento con salida analógica ..................................................................................................... 23
3.1 Cables de conexión/pantalla........................................................................................................23
3.1.1 Normas importantes de seguridad...............................................................................................23
3.1.2 Reglas de cableado .....................................................................................................................25
3.1.3 Conexión para posicionamiento controlado por salida analógica ...............................................26
3.1.4 Conectar componentes................................................................................................................30
3.2 Parametrizar.................................................................................................................................31
3.2.1 Conceptos básicos de parametrización.......................................................................................31
3.2.2 Parametrizar con la pantalla de parametrización ........................................................................33
3.2.3 Parámetros básicos .....................................................................................................................33
3.2.4 Parámetros de accionamiento .....................................................................................................34
3.2.5 Parámetros del eje.......................................................................................................................38
3.2.6 Parámetros del encoder...............................................................................................................42
3.2.7 Parametrización del diagnóstico..................................................................................................44
3.3 Integración en el programa de usuario ........................................................................................45
3.4 Funciones para el posicionamiento con salida analógica ...........................................................47
3.4.1 Posicionamiento con salida analógica - proceso.........................................................................47
3.4.2 Parametrización básica del SFB ANALOG (SFB 44) ..................................................................53
3.4.3 Modo de operación Jog ....................................
3.4.4 Búsqueda del punto de referencia...............................................................................................59
3.4.5 Búsqueda del punto de referencia - proceso...............................................................................63
3.4.6 Modo de operación Modo incremental relativo............................................................................65
3.4.7 Modo de operación Modo incremental absoluto..........................................................................67
3.4.8 Indicación del punto de referencia...............................................................................................70
3.4.9 Borrado del trayecto residual.......................................................................................................74
3.4.10 Medición de longitud....................................................................................................................76
...........................................................................57
3.5 Ajuste de parámetros...................................................................................................................78
3.5.1 Normas importantes de seguridad...............................................................................................78
3.5.2 Determinación y efecto de los parámetros de los módulos.........................................................79
3.5.3 Efecto de los parámetros SFB.....................................................................................................81
3.5.4 Comprobar parámetros................................................................................................................82
CPU 31xC Funciones tecnológicas
Instrucciones de servicio, 02/2007, A5E00105486-04
7

Índice
3.6 Tratamiento de errores y alarmas............................................................................................... 84
3.6.1 Avisos de error en el bloque de función del sistema (SFB)........................................................ 84
3.6.2 Evaluar errores en el programa de usuario ................................................................................ 85
3.6.3 Configurar y evaluar una alarma de diagnóstico ........................................................................ 87
3.7 Instalación de ejemplos............................................................................................................... 89
3.8 Datos técnicos............................................................................................................................. 90
3.8.1 Encoder incremental ................................................................................................................... 90
3.8.2 Listas de errores ......................................................................................................................... 92
3.8.3 Parámetros de los módulos en las pantallas de parametrización - Resumen breve.................. 97
3.8.4 Parámetros del DB de instancia del SFB ANALOG (SFB 44).................................................. 100
4 Posicionamiento con salidas digitales.................................................................................................... 103
4.1 Cables de conexión/pantalla ..................................................................................................... 103
4.1.1 Normas importantes de seguridad............................................................................................ 103
4.1.2 Reglas de cableado .................................................................................................................. 105
4.1.3 Conexión para posicionamiento controlado por salida digital................................................... 106
4.1.4 Conectar componentes............................................................................................................. 109
4.1.5 Conexión de protección para salidas digitales.......................................................................... 110
4.2 Parametrizar.............................................................................................................................. 112
4.2.1 Conceptos básicos de parametrización .................................................................................... 112
4.2.2 Parametrizar con pantallas de parametrización........................................................................ 114
4.2.3 Parámetros básicos .................................................................................................................. 114
4.2.4 Parámetros de accionamiento .................................................................................................. 115
4.2.5 Parámetros del eje .................................................................................................................... 120
4.2.6 Parámetros del encoder............................................................................................................ 124
4.2.7 Parametrización del diagnóstico ............................................................................................... 126
4.3 Integración en el programa de usuario ..................................................................................... 127
4.4 Funciones para el posicionamiento con salidas digitales ......................................................... 129
4.4.1 Posicionamiento con salidas digitales (velocidad lenta/velocidad rápida) ............................... 129
4.4.2 Parametrización básica del SFB DIGITAL (SFB 46) ................................................................ 134
4.4.3 Modo de operación Jog............................................................................................................. 138
4.4.4 Búsqueda del punto de referencia............................................................................................ 140
4.4.4.1 Búsqueda del punto de referencia - funcionamiento ................................................................ 140
4.4.4.2 Búsqueda del punto de referencia - proceso............................................................................ 144
4.4.5 Modo de operación Modo incremental relativo......................................................................... 147
4.4.6 Modo de operación Modo incremental absoluto....................................................................... 150
4.4.7 Indicación del punto de referencia............................................................................................ 153
4.4.8 Borrado del trayecto residual .................................................................................................... 156
4.4.9 Medición de longitud ................................................................................................................. 158
4.5 Ajuste de parámetros ................................................................................................................ 160
4.5.1 Normas importantes de seguridad............................................................................................ 160
4.5.2 Determinación y efecto de los parámetros de los módulos...................................................... 161
4.5.3 Efecto de los parámetros SFB .................................................................................................. 162
4.5.4 Comprobar parámetros............................................................................................................. 163
4.6 Tratamiento de errores y alarmas............................................................................................. 165
4.6.1 Avisos de error en el bloque de función del sistema (SFB)...................................................... 165
4.6.2 Evaluar errores en el programa de usuario .............................................................................. 166
4.6.3 Configurar y evaluar una alarma de diagnóstico ...................................................................... 168
CPU 31xC Funciones tecnológicas
8 Instrucciones de servicio, 02/2007, A5E00105486-04
Índice
4.7 Instalación de ejemplos .............................................................................................................170
4.8 Datos técnicos............................................................................................................................171
4.8.1 Encoder incremental ..................................................................................................................171
4.8.2 Listas de errores ........................................................................................................................173
4.8.3 Parámetros de los módulos en las pantallas de parametrización - Resumen breve ................179
4.8.4 Parámetros del DB de instancia del SFB DIGITAL (SFB 46)....................................................182
5 Contaje, medición de frecuencia y modulación de ancho de pulso........................................................ 185
5.1 Generalidades............................................................................................................................185
5.1.1 Modos de operación y propiedades - Resumen ........................................................................185
5.1.2 Funcionalidad - Resumen..........................................................................................................187
5.1.3 Componentes de una aplicación de contador - Resumen.........................................................188
5.2 Cables de conexión/pantalla......................................................................................................189
5.2.1 Reglas de cableado ...................................................................................................................189
5.2.2 Asignación de las conexiones....................................................................................................190
5.2.3 Conectar componentes..............................................................................................................194
5.3 Parametrizar...............................................................................................................................195
5.3.1 Parametrizar con pantallas de parametrización ........................................................................195
5.3.2 Parámetros básicos ...................................................................................................................196
5.3.3 Parámetros para contaje sin fin, único y periódico....................................................................197
5.3.4 Medición de frecuencia..............................................................................................................200
5.3.5 Modulación de ancho de pulso: .................................................................................................202
5.4 Integración de las funciones en el programa de usuario...........................................................203
5.5 El contaje - descripción de la función ........................................................................................205
5.5.1 Conceptos básicos para el contaje............................................................................................205
5.5.2 Contaje sin fin ............................................................................................................................208
5.5.3 Contaje único .............................................................................................................................209
5.5.4 Contaje periódico .......................................................................................................................213
5.5.5 Control del contador desde el programa de usuario .................................................................216
5.5.6 Describir y leer la interfaz de peticiones del contador...............................................................220
5.5.7 Bloques de función del contador..........................
......................................................................223
5.5.8 Entradas del contador................................................................................................................224
5.5.9 Función de puerta del contador .................................................................................................225
5.5.10 Comportamiento de la salida en el contador .............................................................................228
5.5.11 Efectos de la histéresis en los modos de contaje......................................................................231
5.5.12 Alarma de proceso durante el contaje .......................................................................................235
5.6 Descripción de las funciones para medición de frecuencia.......................................................236
5.6.1 Proceso de una medición de frecuencia....................................................................................236
5.6.2 Control del frecuencímetro del programa de usuario ................................................................239
5.6.3 Describir y leer la interfaz de peticiones para la medición de frecuencia..................................242
5.6.4 Bloques de función del frecuencímetro .....................................................................................244
5.6.5 Entradas del frecuencímetro......................................................................................................245
5.6.6 Función de puerta del frecuencímetro .......................................................................................246
5.6.7 Comportamiento de la salida en el frecuencímetro ...................................................................247
5.6.8 Alarma de proceso para medición de frecuencia ......................................................................248
CPU 31xC Funciones tecnológicas
Instrucciones de servicio, 02/2007, A5E00105486-04
9

Índice
5.7 Descripción de las funciones para modulación de ancho de pulso.......................................... 249
5.7.1 Proceso de la modulación de ancho de pulso .......................................................................... 249
5.7.2 Controlar la modulación de ancho de pulso desde el programa de usuario ............................ 250
5.7.3 Describir y leer la interfaz de peticiones para la modulación de ancho de pulso..................... 252
5.7.4 Bloques de función de la modulación de ancho de pulso......................................................... 254
5.7.5 Función de puerta de la modulación de ancho de pulso .......................................................... 255
5.7.6 Ajuste de los parámetros para la secuencia de impulsos......................................................... 256
5.7.7 Comportamiento de la salida en la modulación de ancho de pulso ......................................... 258
5.7.8 Alarma de proceso para la modulación de ancho de pulso...................................................... 259
5.8 Tratamiento de errores y alarmas............................................................................................. 260
5.8.1 Visualización de errores............................................................................................................ 260
5.8.2 Avisos de error en el bloque de función del sistema (SFB)...................................................... 260
5.8.3 Configurar una alarma de diagnóstico ...................................................................................... 262
5.8.4 Configurar una alarma de proceso ........................................................................................... 264
5.9 Instalación de ejemplos............................................................................................................. 267
5.10 Datos técnicos........................................................................................................................... 268
5.10.1 Funciones.................................................................................................................................. 268
5.10.2 Encoder incremental ................................................................................................................. 270
5.10.3 Listas de errores ....................................................................................................................... 272
5.10.4 Parámetros de los módulos (visión general)............................................................................. 274
5.10.5 DBs de instancia de los SFBs................................................................................................... 279
6 Acoplamiento punto a punto .................................................................................................................. 285
6.1 Generalidades........................................................................................................................... 285
6.1.1 Descripción del producto........................................................................................................... 285
6.1.2 Interlocutor ................................................................................................................................ 286
6.1.3 Componentes para un acoplamiento punto a punto................................................................. 286
6.1.4 Propiedades de la interfaz X27 (RS 422/485) .......................................................................... 287
6.1.5 Transferencia en serie de un carácter ...................................................................................... 288
6.2 Cables de conexión/pantalla ..................................................................................................... 291
6.2.1 Reglas de cableado .......................................
........................................................................... 291
6.2.2 Conexión de una línea serie ..................................................................................................... 292
6.3 Parametrizar.............................................................................................................................. 293
6.3.1 Tipos de parámetros ................................................................................................................. 293
6.3.2 Parametrizar con pantallas de parametrización........................................................................ 294
6.3.3 Parámetros básicos .................................................................................................................. 295
6.3.4 Datos de parametrización del driver ASCII............................................................................... 296
6.3.5 Datos de parametrización del procedimiento 3964(R) ............................................................. 305
6.3.6 Datos de parametrización del acoplamiento RK 512................................................................ 309
6.4 Integración del acoplamiento en el programa de usuario......................................................... 310
6.5 Funciones de comunicación ..................................................................................................... 312
6.5.1 Funciones de comunicación para ASCII/3964(R)..................................................................... 312
6.5.1.1 Funciones de comunicación para ASCII/3964(R) - Conceptos básicos................................... 312
6.5.1.2 Envío de datos con el SFB 60 "SEND_PTP"............................................................................ 312
6.5.1.3 Recepción de datos con el SFB 61 "RCV_PTP"....................................................................... 315
6.5.1.4 Borrar el búfer de recepción con el SFB 62 "RES_RCVB"....................................................... 317
CPU 31xC Funciones tecnológicas
10 Instrucciones de servicio, 02/2007, A5E00105486-04

Índice
6.5.2 Funciones de comunicación para el acoplamiento RK 512.......................................................319
6.5.2.1 Funciones de comunicación para el acoplamiento RK 512 - Conceptos básicos.....................319
6.5.2.2 Envío de datos con el SFB 63 " SEND_RK"..............................................................................320
6.5.2.3 Recogida de datos con SFB 64 "FETCH_RK"...........................................................................324
6.5.2.4 Recibir/Facilitar datos con el SFB 65 "SERVE_RK"..................................................................329
6.5.2.5 Ejemplo: Aplicación de marcas de acoplamiento ......................................................................332
6.5.2.6 Ejemplo: SEND_RK con marca de acoplamiento......................................................................333
6.5.3 Nota relativa a la programación de los bloques de función de sistema ....................................334
6.6 Puesta en servicio......................................................................................................................336
6.6.1 Puesta en servicio de la interfaz física ......................................................................................336
6.7 Tratamiento de errores y alarmas..............................................................................................338
6.7.1 Localización y diagnóstico de errores........................................................................................338
6.7.2 Avisos de error en el bloque de función del sistema (SFB).......................................................338
6.7.3 Números de error en el telegrama de respuesta.......................................................................339
6.7.4 Configurar y evaluar una alarma de diagnóstico .......................................................................340
6.8 Instalación de ejemplos .............................................................................................................342
6.9 Descripción del protocolo...........................................................................................................343
6.9.1 Transferencia de datos con el driver ASCII ...............................................................................343
6.9.1.1 Transferencia de datos con el driver ASCII - Conceptos básicos .............................................343
6.9.1.2 Envío de datos con el driver ASCII............................................................................................344
6.9.1.3 Recepción de datos con el driver ASCII ....................................................................................346
6.9.1.4 Control del flujo de datos/Procedimiento de protocolo de enlace .............................................353
6.9.2 Transferencia de datos con el procedimiento 3964(R)..............................................................354
6.9.2.1 Transferencia de datos con el procedimiento 3964(R) - Conceptos básicos............................354
6.9.2.2 Envío de datos con 3964(R) ......................................................................................................356
6.9.2.3 Recepción de datos con 3964(R) ..............................................................................................358
6.9.2.4 Tratamiento de errores al enviar y recibir con el procedimiento 3964 (R) ................................360
6.9.2.5 Procedimiento 3964(R) Arranque .........................
.....................................................................363
6.9.2.6 Procedimiento 3964(R) Enviar...................................................................................................364
6.9.2.7 Procedimiento 3964(R) recibir ...................................................................................................365
6.9.3 Transferencia de datos con el acoplamiento RK 512................................................................368
6.9.3.1 Transferencia de datos con el acoplamiento RK 512 - Conceptos básicos..............................368
6.9.3.2 Enviar datos con el RK 512 .......................................................................................................371
6.9.3.3 Recoger datos con el RK 512....................................................................................................374
6.9.3.4 Proceso del RK 512 en peticiones.............................................................................................378
6.10 Datos técnicos............................................................................................................................380
6.10.1 Datos técnicos generales...........................................................................................................380
6.10.2 Datos técnicos del driver ASCII .................................................................................................381
6.10.3 Datos técnicos del procedimiento 3964(R)................................................................................382
6.10.4 Datos técnicos del acoplamiento RK 512 ..................................................................................383
6.10.5 Número mínimo de ciclos de la CPU.........................................................................................383
6.10.6 Tiempos de transferencia ..........................................................................................................384
6.10.7 Cables........................................................................................................................................385
6.10.8 Avisos de error...........................................................................................................................389
6.10.9 Parámetros de los SFB..............................................................................................................398
CPU 31xC Funciones tecnológicas
Instrucciones de servicio, 02/2007, A5E00105486-04
11

Índice
7 Regulación............................................................................................................................................. 403
7.1 Generalidades........................................................................................................................... 403
7.1.1 Esbozo de la regulación integrada............................................................................................ 403
7.1.2 Conceptos básicos.................................................................................................................... 405
7.2 Cables de conexión/pantalla ..................................................................................................... 408
7.2.1 Reglas de cableado .................................................................................................................. 408
7.3 Parametrizar.............................................................................................................................. 409
7.3.1 Parametrizar SFBs con pantallas de parametrización.............................................................. 409
7.4 Integración de la regulación en el programa de usuario........................................................... 410
7.5 Descripción de las funciones .................................................................................................... 411
7.5.1 Regulación continua con el SFB 41 "CONT_C"........................................................................ 411
7.5.2 Regulación discontinua con el SFB 42 "CONT_S" ................................................................... 418
7.5.3 Formas de impulsos con el SFB 43 "PULSEGEN"................................................................... 424
7.6 Diagnóstico/Tratamiento de errores.......................................................................................... 436
7.7 Instalación de ejemplos............................................................................................................. 436
Índice alfabético..................................................................................................................................... 437
CPU 31xC Funciones tecnológicas
12 Instrucciones de servicio, 02/2007, A5E00105486-04

Índice
Tablas
Tabla 3-1 Asignación del conector X1 .........................................................................................................27
Tabla 3-2 Asignación del conector X2 .........................................................................................................28
Tabla 4-1 Asignación del conector X2 .......................................................................................................107
Tabla 4-2 Parámetro Modo de control .......................................................................................................179
Tabla 4-3 Significado de los modos de control ..........................................................................................179
Tabla 4-4 Otros parámetros del accionamiento .........................................................................................180
Tabla 5-1 Parámetros de entrada ..............................................................................................................251
Tabla 5-2 Parámetros de salida .................................................................................................................251
Tabla 5-3 Rango de frecuencia..................................................................................................................268
Tabla 5-4 Rango de medición posibles con indicaciones de errores ........................................................268
Tabla 5-5 Tipo de evento 01 (01H): "Zählen, Parametrierfehler SFB-Parameter (SFB 47)".....................272
Tabla 5-6 Tipo de evento 02 (02H): "Frequenzmessen, Parametrierfehler SFB-Parameter (SFB 48)"....272
Tabla 5-7 Tipo de evento 04 (04H): "Pulsweitenmodulation, Parametrierfehler SFB-Parameter
(SFB 49)" ...................................................................................................................................273
Tabla 5-8 Tipo de evento 128 (80H): "Error de parametrización de los parámetros generales del
SFB"...........................................................................................................................................273
CPU 31xC Funciones tecnológicas
Instrucciones de servicio, 02/2007, A5E00105486-04
13

Índice
CPU 31xC Funciones tecnológicas
14 Instrucciones de servicio, 02/2007, A5E00105486-04
Resumen de las funciones tecnológicas
Generalidades
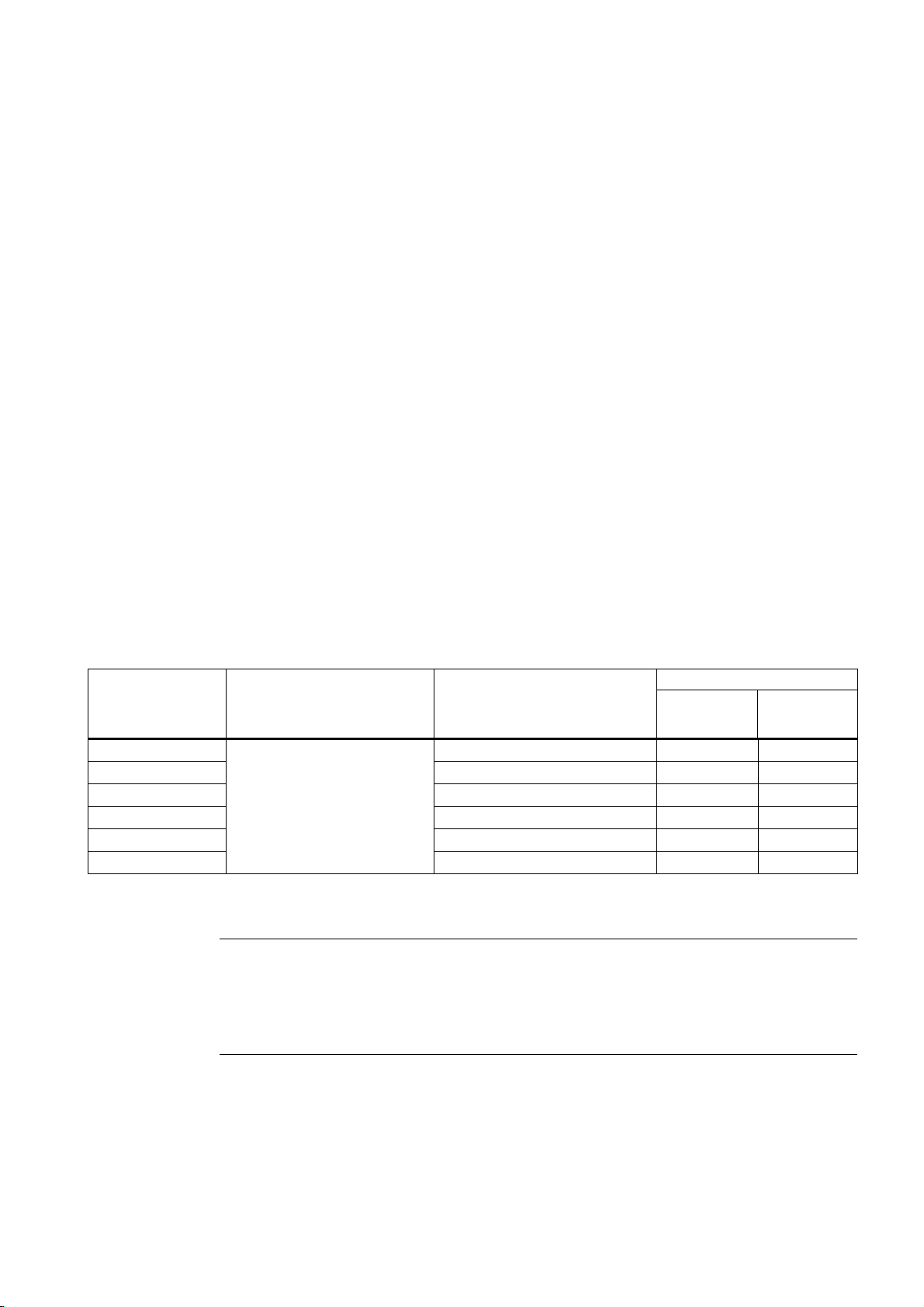
Dependiendo del tipo de CPU, son compatibles las siguientes funciones tecnológicas:
CPU Posicionamiento Contaje Acoplamiento punto a
punto
CPU 312C – 2 canales respectivamente para
contaje, medida de frecuencia
(máx. 10 kHz)
o modulación de ancho de pulso (2,5 kHz)
CPU 313C – 3 canales respectivamente para
contaje, medida de frecuencia
(máx. 30 kHz)
o modulación de ancho de pulso (2,5 kHz)
CPU 313C-2 DP – 3 canales respectivamente para
contaje, medida de frecuencia
(máx. 30 kHz)
o modulación de ancho de pulso (2,5 kHz)
CPU 313C-2 PtP – 3 canales respectivamente para
contaje, medida de frecuencia
(máx. 30 kHz)
o modulación de ancho de pulso (2,5 kHz)
CPU 314C-2 DP 1 canal con salida
analógica o salida
digital
CPU 314C-2 PtP 1 canal con salida
analógica o salida
digital
1
Si se utiliza un canal de posicionamiento, sólo quedarán 2 canales disponibles.
4 canales1) respectivamente para
contaje, medida de frecuencia
(máx.60 kHz)
o modulación de ancho de pulso (2,5 kHz)
4 canales1) respectivamente para
contaje, medida de frecuencia
(máx.60 kHz)
o modulación de ancho de pulso (2,5 kHz)
ASCII (19,2 kbaudios
dúplex; 38,4 kbaudios
3964R (38,4 kbaudios)
ASCII (19,2 kbaudios
dúplex; 38,4 kbaudios
3964R (38,4 kbaudios)
RK512 (38,4 kbaudios)
– –
– Sí
– Sí
semidúplex)
– Sí
semidúplex)
1
Regulación
Sí
Sí
Acceso a las entradas y salidas utilizadas por las funciones tecnológicas
Las entradas utilizadas por las funciones tecnológicas se pueden leer en cualquier momento
mediante la dirección E de la periferia de entradas digitales.
Las salidas utilizadas por las funciones tecnológicas están bloqueadas internamente de
manera que no puedan ser sobrescritas.
CPU 31xC Funciones tecnológicas
Instrucciones de servicio, 02/2007, A5E00105486-04
15
Resumen de las funciones tecnológicas
CPU 31xC Funciones tecnológicas
16 Instrucciones de servicio, 02/2007, A5E00105486-04

Posicionamiento
2.1 Tipos admitidos de posicionamiento controlado
2.1.1 Posicionamiento controlado con salida analógica
Introducción
La CPU admite el posicionamiento controlado con salida analógica.
Propiedades
El posicionamiento controlado con salida analógica presenta las propiedades siguientes:
• El control del accionamiento se realiza mediante una salida analógica asignada de forma
fija ya sea con una tensión de +/-10 V (pin 16) o intensidad de +/-20 mA (pin 17) o bien
con una tensión de 0 a 10 V (pin 16) o intensidad de 0 a 20 mA (pin 17) y salida digital de
24 V adicional como señal de sentido (X2, pin 29)
• Control de un freno y/o habilitación de un accionamiento mediante una salida digital de
24 V asignada de forma fija (X2, pin 28).
2
• Se pueden conectar p. ej.a servomotores a través de un convertidor o a motores
asíncronos a través de un convertidor de frecuencia.
• La lectura de recorrido se lleva a cabo por medio de un encoder de 24 V.
• El movimiento se efectúa con una aceleración y una deceleración preseleccionable.
• En primer lugar, el eje se acelera a una velocidad preseleccionada. A una distancia
definida del destino, se frena a una velocidad inferior (velocidad lenta). Poco antes de
que el eje alcance el destino, el accionamiento se desconecta a una distancia definida
del destino. De este modo, la CPU puede vigilar la aproximación al destino.
• El usuario preselecciona la velocidad, la aceleración, el retardo y las diferencias respecto
al destino mediante una serie de parámetros.
CPU 31xC Funciones tecnológicas
Instrucciones de servicio, 02/2007, A5E00105486-04
17

Posicionamiento
2.1 Tipos admitidos de posicionamiento controlado
2.1.2 Posicionamiento controlado con salidas digitales
Introducción
La CPU admite el posicionamiento controlado con salidas digitales (control de velocidad
lenta/velocidad rápida).
Propiedades
El posicionamiento controlado con salidas digitales (control de velocidad lenta/velocidad
rápida) presenta las propiedades siguientes:
• El control del accionamiento se efectúa mediante cuatro salidas digitales de 24 V
asignadas de forma fija. Las salidas digitales controlan el sentido y las velocidades
(velocidad lenta/velocidad rápida) dependiendo del tipo de control parametrizado.
• Se pueden conectar motores de polos conmutables mediante una combinación de
contactores o motores asíncronos mediante un convertidor de frecuencia con
velocidades parametrizadas de forma fija.
• La lectura de recorrido se lleva a cabo por medio de un encoder de 24 V.
• Al principio, la aproximación al destino se efectúa a una velocidad preseleccionada
(velocidad rápida). A una distancia predefinida del destino, se conmuta a una velocidad
inferior (velocidad lenta). Poco antes de que el eje alcance el destino, el accionamiento
se desconecta a una distancia definida del destino. De este modo, la CPU puede vigilar
la aproximación al destino.
• El usuario selecciona la velocidad y las diferencias respecto al destino mediante una
serie de parámetros.
CPU 31xC Funciones tecnológicas
18 Instrucciones de servicio, 02/2007, A5E00105486-04
Posicionamiento
2.2 Generalidades sobre el posicionamiento
2.2 Generalidades sobre el posicionamiento
Vista de conjunto
• Número de ejes
– CPU 314C-2 DP/PtP: 1 eje
Nota
Al utilizar una función de posicionamiento, sólo se dispone de 2 canales de contaje (canales
2 y 3).
• Tipos de ejes
– Eje lineal
– Eje rotativo
• Accionamientos/motores típicos
– Motor asíncrono de polos conmutables mediante combinación de contactores
– Motor asíncrono mediante convertidor de frecuencia
– Servomotor mediante convertidor
• Sistemas de medición de recorrido:
– Encoder incremental de 24 V, asimétrico con dos pistas desplazadas 90 grados (con
o sin señal cero)
• Funciones de vigilancia (activables por separado)
– Error en señal (señal cero)
– Margen de desplazamiento
– zona de trabajo
– Valor real
– Aproximación a destino
– Zona de destino
• Sistema de medición
– Todos los valores se indican en impulsos.
• Configuración
– En una pantalla de parametrización
CPU 31xC Funciones tecnológicas
Instrucciones de servicio, 02/2007, A5E00105486-04
19

Posicionamiento
2.3 Funcionalidad
2.3 Funcionalidad
Vista de conjunto
• Modos de operación:
– Jog
– Búsqueda del punto de referencia
– Modo incremental relativo
– Modo incremental absoluto
• Otras funciones:
– Búsqueda del punto de referencia
– Borrar trayecto residual
– Medición de longitud
CPU 31xC Funciones tecnológicas
20 Instrucciones de servicio, 02/2007, A5E00105486-04
Posicionamiento
2.4 Componentes para el posicionamiento controlado
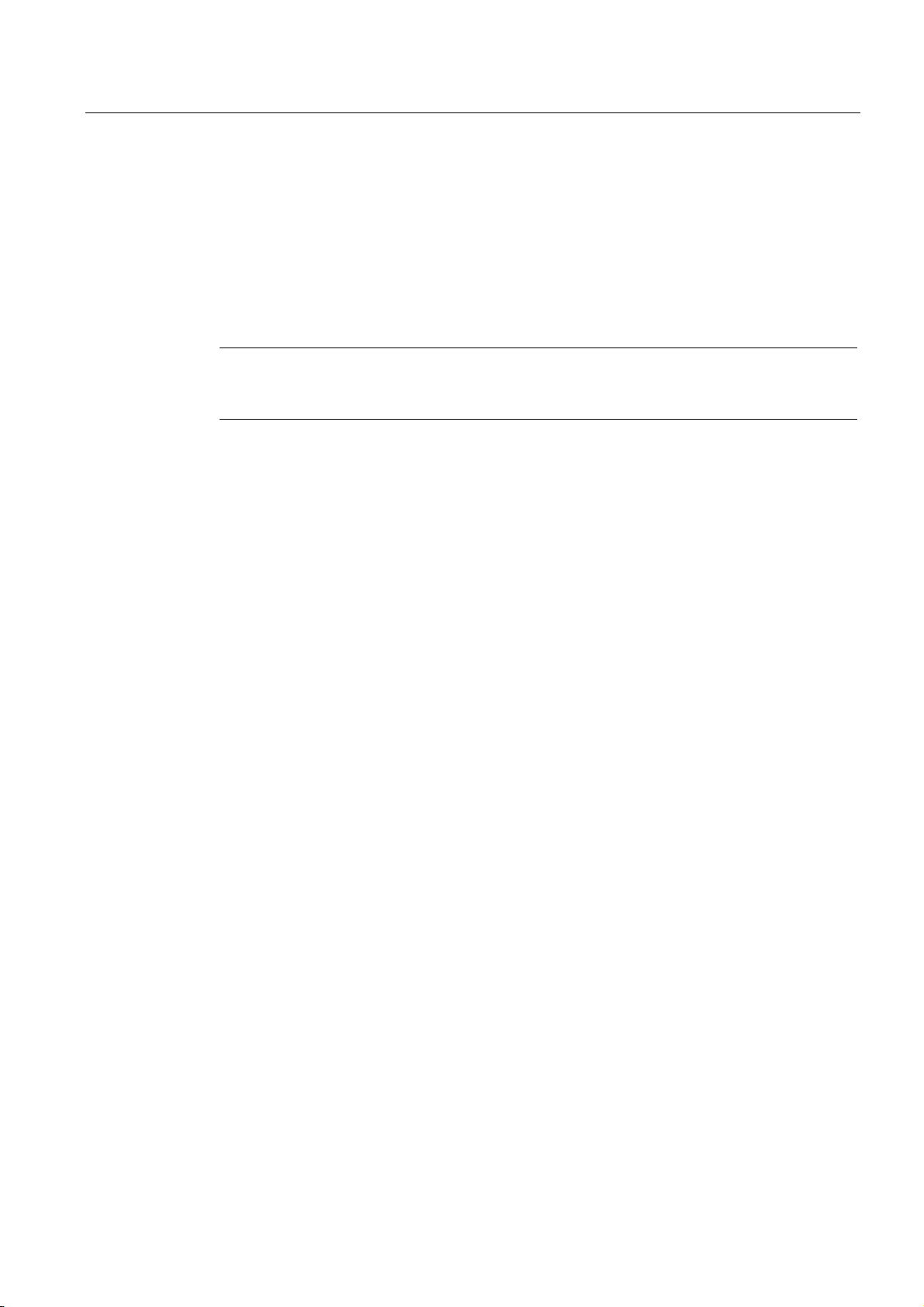
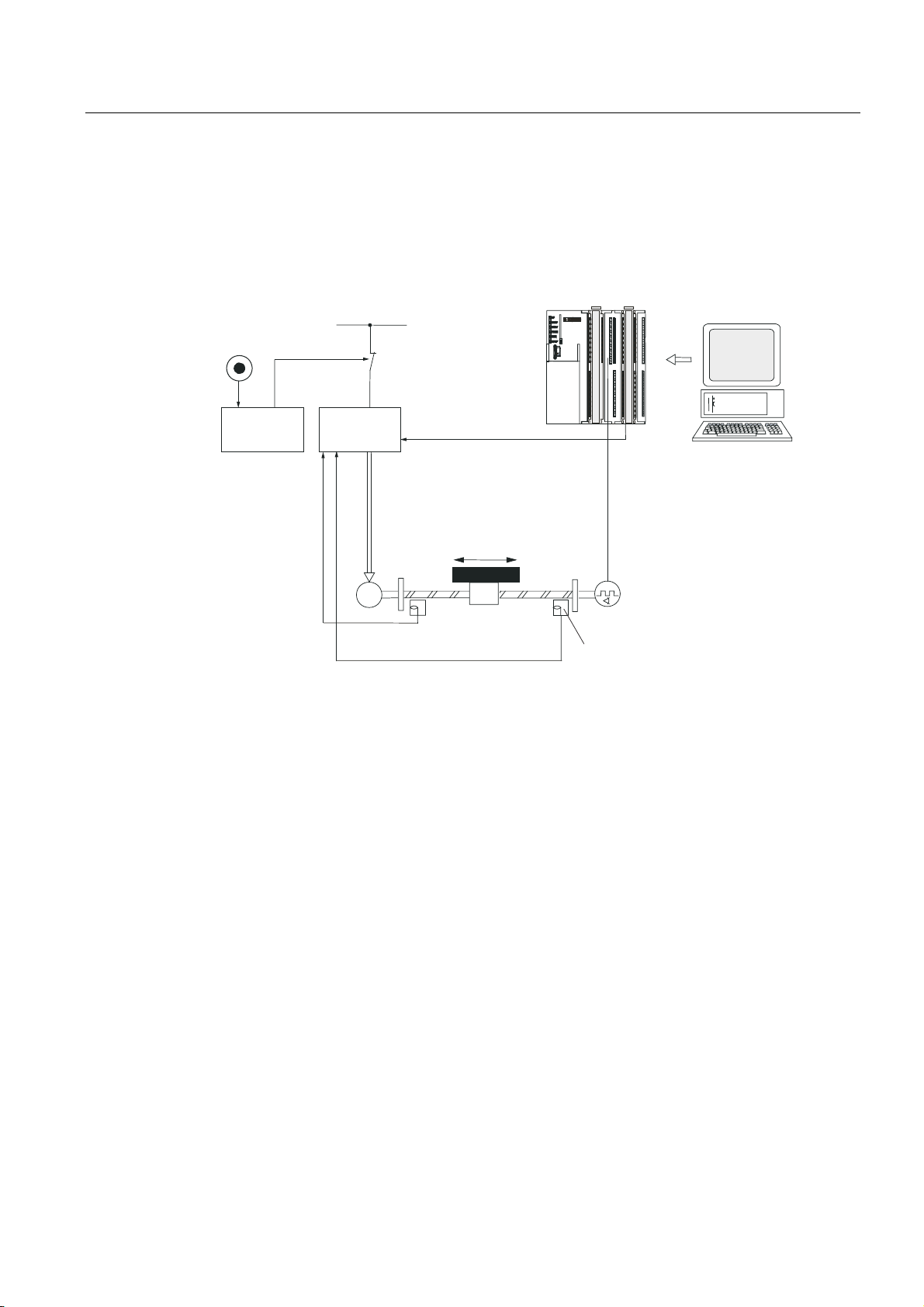
2.4 Componentes para el posicionamiento controlado
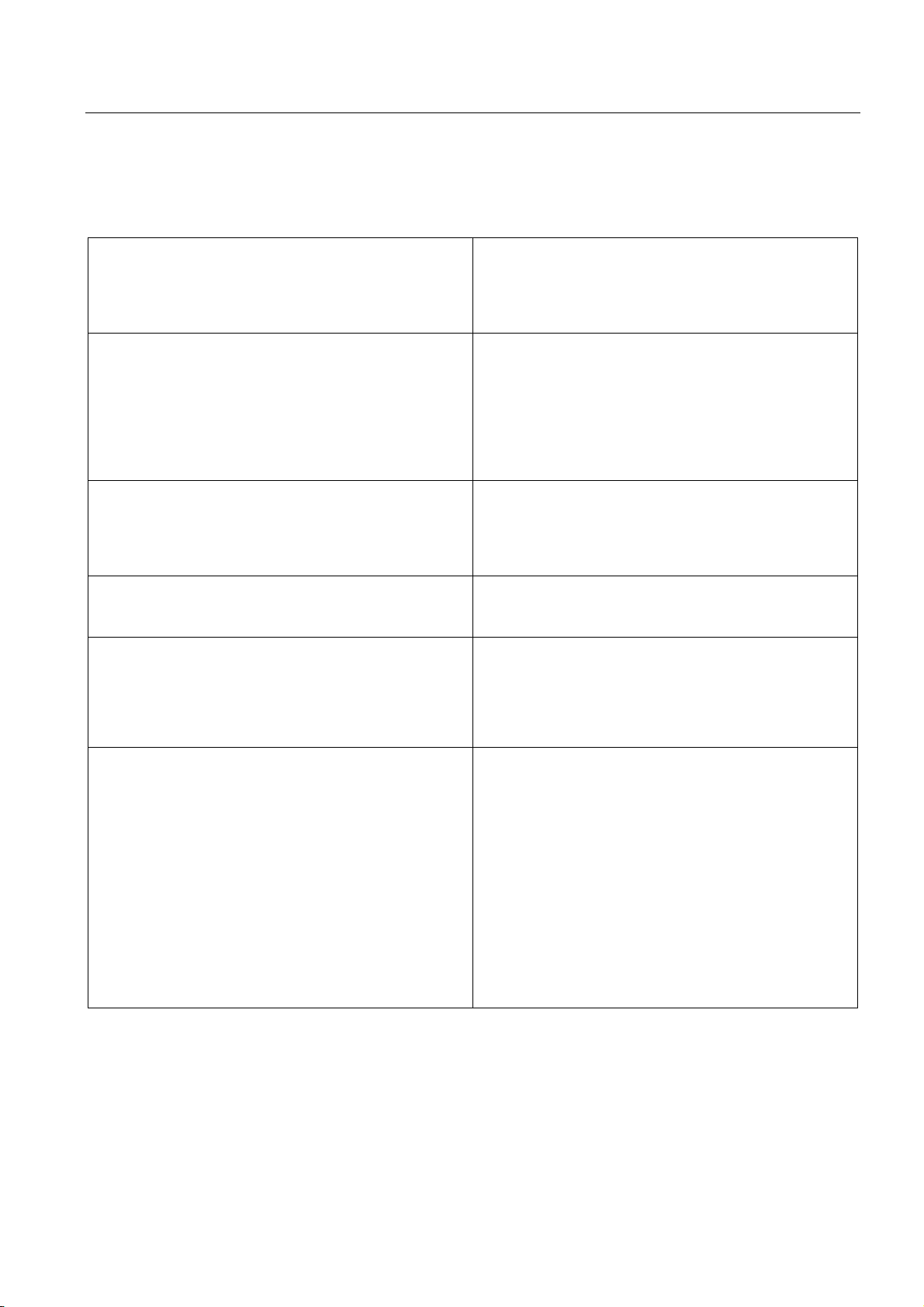
Estructura del principio
El siguiente gráfico muestra los componentes para el posicionamiento controlado:
5HG
LQWHUUXSWRUGHSDUDGDGH
HPHUJHQFLD
GHVHJXULGDG
'LVSRVLWLYR
(WDSDGH
SRWHQFLD
GHSURFHVDPLHQWR
(VWDFLRQHV
0
0RWRU
PHF£QLFRV
(OHPHQWRVGH
WUDQVPLVLµQ
&38&
0RYLPLHQWR
(QFRGHU
)LQDOGHFDUUHUDKDUGZDUH
3&3*
• La CPU controla la etapa de potencia por medio de sus salidas.
• La etapa de potencia procesa la señal de posicionamiento y controla el motor.
• En caso de que reaccione el dispositivo de seguridad (interruptor de paro de emergencia
o final de carrera de hardware), la etapa de potencia apaga el motor.
• El motor se controla a través de la etapa de potencia y acciona el eje.
• El encoder proporciona información acerca del recorrido y el sentido del movimiento.
• Como elementos de transmisión mecánica es posible controlar ejes lineales y rotativos.
• Con el PG/PC
– Parametrice la CPU en las
tecnológicas de la CPU.
– Programe la CPU con bloques de función de sistema que puede insertar directamente
en el programa de usuario.
– se pone en funcionamiento la CPU y se comprueba la CPU mediante el software
estándar STEP 7 (funciones de observación y tabla de variables).
CPU 31xC Funciones tecnológicas
Instrucciones de servicio, 02/2007, A5E00105486-04
pantallas de parametrización
para las funciones
21

Posicionamiento
2.4 Componentes para el posicionamiento controlado
CPU 31xC Funciones tecnológicas
22 Instrucciones de servicio, 02/2007, A5E00105486-04
Posicionamiento con salida analógica
3.1 Cables de conexión/pantalla
3.1.1 Normas importantes de seguridad
Mantenimiento del concepto de seguridad
Peligro
Para garantizar la seguridad de la instalación, es imprescindible instalar los elementos de
conexión mencionados a continuación y adaptar la instalación a las siguientes condiciones:
• Interruptores de paro de emergencia que permitan parar toda la instalación.
• Finales de carrera de hardware que actúen directamente sobre las etapas de potencia de
todos los accionamientos.
• Guardamotores.
3
Advertencia
Pueden producirse daños personales y materiales si no se desconecta convenientemente la
alimentación eléctrica:
Si cablea el conector frontal de la CPU sin desconectar la alimentación eléctrica, puede
resultar herido por una descarga eléctrica.
Cablee la CPU únicamente cuando ésta se encuentre sin tensión.
Daños corporales y materiales ocasionados por falta de dispositivos de seguridad:
Si no existe ningún interruptor de paro de emergencia, los equipos conectados pueden
provocar desperfectos.
Instale un interruptor de paro de emergencia con el que pueda desconectar los
accionamientos conectados.
CPU 31xC Funciones tecnológicas
Instrucciones de servicio, 02/2007, A5E00105486-04
23
Posicionamiento con salida analógica
3.1 Cables de conexión/pantalla
Nota
Es posible conectar inductancias directamente(p. ej., relés y contactores) sin conexión
externa.
Si los circuitos eléctricos de salida de SIMATIC pueden ser desconectados mediante
contactos adicionales (p. ej., contactos de relé), deberá equipar las inductancias con
dispositivos de protección contra sobretensiones.
CPU 31xC Funciones tecnológicas
24 Instrucciones de servicio, 02/2007, A5E00105486-04
Posicionamiento con salida analógica
3.1 Cables de conexión/pantalla
3.1.2 Reglas de cableado
Cables de conexión/apantallamiento
• Los cables para las salidas analógicas y los encoders de 24 V deben estar apantallados.
• Los cables para las entradas y salidas digitales deberán estar apantallados cuando su
longitud sea superior a 100 m.
• La pantalla de los cables debe ir conectada en ambos extremos.
2
• Cables flexibles, diámetro de 0,25 a 1,5 mm
• No es necesario utilizar punteras de cable. No obstante, si desea hacerlo, puede utilizar
punteras de cable sin cuello aislante (DIN 46228, Forma A, variante corta).
Estribo de conexión para cables apantallados
El estribo de conexión para cables apantallados permite conectar a tierra de forma cómoda
y sencilla todas los cables apantallados mediante conexión directa al perfil soporte.
Otras notas
Encontrará más indicaciones en el manual de instrucciones
de configuración e instalación de su CPU.
Datos de la CPU
y en el manual
CPU 31xC Funciones tecnológicas
Instrucciones de servicio, 02/2007, A5E00105486-04
25

Posicionamiento con salida analógica
3.1 Cables de conexión/pantalla
3.1.3 Conexión para posicionamiento controlado por salida analógica
Introducción
Conecte a los conectores frontales X1 y X2 de la CPU 314C-2 DP/PtP los siguientes
componentes:
• Encoder 24 V
• Interruptor para la medición de longitud
• Sensor del punto de referencia
• Etapa de potencia
; ;
6)
%86)
'&9
)5&(
581
6723
581
6723
05(6
CPU 31xC Funciones tecnológicas
26 Instrucciones de servicio, 02/2007, A5E00105486-04
Posicionamiento con salida analógica
3.1 Cables de conexión/pantalla
Descripción de la asignación de conectores
En las asignaciones de conectores detalladas a continuación sólo se describen las
conexiones relevantes para el tipo de posicionamiento en cuestión.
Nota
Si utiliza la función de posicionamiento no podrá utilizar los contadores 0 y 1, ya que
necesitan en parte las mismas entradas.
Tabla 3-1 Asignación del conector X1
Conexión Nombre/Dirección Función
1 – No conectado
2 AI 0 (V) –
3 AI 0 (I) –
4 AI 0 (C) –
5 AI 1 (V) –
6 AI 1 (I) –
7 AI 1 (C) –
8 AI 2 (V) –
9 AI 2 (I) –
10 AI 2 (C) –
11 AI 3 (V) –
12 AI 3 (I) –
13 AI 3 (C) –
14 AI R_P –
15 AI R_N –
16 AO 0 (V) Salida de tensión de la etapa de potencia
17 AO 0 (I) Salida de intensidad de la etapa de potencia
18 AO 1 (V) –
19 AO 1 (I) –
20 Mana Masa analógica
21 – No conectado
22 DI+2.0 –
23 DI+2.1 –
24 DI+2.2 –
25 DI+2.3 –
26 DI+2.4 –
27 DI+2.5 –
28 DI+2.6 –
29 DI+2.7 –
CPU 31xC Funciones tecnológicas
Instrucciones de servicio, 02/2007, A5E00105486-04
27
Posicionamiento con salida analógica
3.1 Cables de conexión/pantalla
Conexión Nombre/Dirección Función
30 4 M Masa
V: Entrada/salida de tensión
I: Entrada/salida de intensidad
C: Entrada común
Tabla 3-2 Asignación del conector X2
Conexión Nombre/Dirección Funcionamiento
1 1 L+ Tensión de alimentación de 24 V de las entradas
2 DI+0.0 Señal de encoder A
3 DI+0.1 Señal de encoder B
4 DI+0.2 Señal de encoder N
5 DI+0.3 Medición de longitud
6 DI+0.4 Sensor del punto de referencia
7 DI+0.5 –
8 DI+0.6 –
9 DI+0.7 –
10 – No conectado
11 – No conectado
12 DI+1.0 –
13 DI+1.1 –
14 DI+1.2 –
15 DI+1.3 –
16 DI+1.4 –
17 DI+1.5 –
18 DI+1.6 –
19 DI+1.7 –
20 1 M Masa
21 2 L+ Tensión de alimentación de 24 V de las salidas
22 DO+0.0 –
23 DO+0.1 –
24 DO+0.2 –
25 DO+0.3 –
26 DO+0.4 –
27 DO+0.5 –
28 DO+0.6 CONV_EN: Habilitación de la etapa de potencia
29 DO+0.7 CONV_DIR: Señal de sentido*
30 2 M Masa
31 3 L+ Tensión de alimentación de 24 V de las salidas
32 DO+1.0 –
33 DO+1.1 –
34 DO+1.2 –
CPU 31xC Funciones tecnológicas
28 Instrucciones de servicio, 02/2007, A5E00105486-04
Posicionamiento con salida analógica
3.1 Cables de conexión/pantalla
Conexión Nombre/Dirección Funcionamiento
35 DO+1.3 –
36 DO+1.4 –
37 DO+1.5 –
38 DO+1.6 –
39 DO+1.7 –
40 3 M Masa
*: La salida sólo se utiliza con el tipo de control "Tensión de 0 a 10 V o intensidad de 0 a 20 mA y señal de sentido".
CPU 31xC Funciones tecnológicas
Instrucciones de servicio, 02/2007, A5E00105486-04
29
Posicionamiento con salida analógica
3.1 Cables de conexión/pantalla
3.1.4 Conectar componentes
Procedimiento
1. Desconecte la alimentación eléctrica de todos los componentes
2. Conecte la tensión de alimentación de las entradas y salidas:
– 24 V a X2, pin 1, 21 y 31
– Masa a X1, pin 30 y X2, pin 20, 30 y 40
3. Conecte el encoder de 24 V y el interruptor a la fuente de alimentación de 24 V.
4. Conecte las señales del encoder y los interruptores necesarios (X2, pin 2 a 6 y pin 20).
En las entradas digitales "medición de longitud" y "sensor de punto de referencia" se
pueden conectar interruptores sin rebote (24 V de tipo P) o sensores sin contacto/BERO
(detector de proximidad de 2 ó 3 hilos).
5. Conecte la etapa de potencia a la fuente de alimentación.
6. Conecte las líneas de señales de la etapa de potencia mediante cables apantallados (X1,
pin 16 ó 17 y pin 20 y X2, pin 28).
Si para el control de la etapa de potencia emplea una tensión de 0 a 10 V (pin 16) o
intensidad de 0 a 20 mA (pin 17) con una salida digital adicional de 24 V como señal de
sentido, enlace además la entrada correspondiente de la etapa de potencia con la salida
digital de 24 V CONV_DIR (X2, pin 29).
7. Retire el material aislante de los cables apantallados y fije la pantalla del cable al estribo
de conexión para cables apantallados. Para ello, utilice abrazaderas para pantallas.
Nota
La CPU no detecta los fallos de las entradas digitales. Activando la vigilancia del valor
real (consulte Parámetros de accionamiento (Página 34) ) se puede detectar el fallo de
un sensor.
Este fallo puede deberse a las siguientes causas:
• Fallo de la entrada digital
• Rotura de hilo
• Defecto del encoder
• Fallo en la etapa de potencia
CPU 31xC Funciones tecnológicas
30 Instrucciones de servicio, 02/2007, A5E00105486-04
 Loading...
Loading...