

Round Solutions Ping Pong Product Manual
Ping Pong
Product Manual
Rev .06 – 23-02-2016
1

1 Contents
1 Contents ................................................................................................................................................ 2
1- Product Description .............................................................................................................................. 3
2- Key Benefits .......................................................................................................................................... 3
3- Product Features .................................................................................................................................. 3
4- Interfaces .............................................................................................................................................. 4
5- Development Enviroment: ................................................................................................................... 4
6- Downloading Firmware to the PingPong board: ................................................................................. 5
a- PIC Programmer: ............................................................................................................................... 5
b- USB Boot Loader: .............................................................................................................................. 5
7- PIN Outs: ............................................................................................................................................... 6
8- RF Connectors: ...................................................................................................................................... 7
9- Inter-modules Connections: ................................................................................................................. 7
10- Firmware Development: .................................................................................................................. 8
1. PPR_cdc_com_port_dual [1]: ............................................................................................................. 10
2 PPR_tcpip_client_server [2]: ............................................................................................................... 11
3 PP_tcpip_tcp_server[3]:...................................................................................................................... 16
4 PP_cdc_com_port_single[4]: .............................................................................................................. 17
5 PingPong_BSP: .................................................................................................................................... 17
5.1 USB Communications: ................................................................................................................. 18
5.2 USART Driver for XE910 Telit Cellular module: ........................................................................... 19
5.3 USART Driver for GPS module: .................................................................................................... 20
5.4 SPI Driver for the MCP3910: ....................................................................................................... 20
5.5 I2C Driver for the Accelerometer/Magnetometer FXOS8700CQ: .............................................. 21
5.6 RTCC Driver: ................................................................................................................................ 21
5.7 SQI Driver: ................................................................................................................................... 21
5.8 Analog and Digital IOs: ................................................................................................................ 21
5.9 Frequency Counter inputs: ......................................................................................................... 22
5.10 1-Wire Communications: ............................................................................................................ 22
11- References: ..................................................................................................................................... 22
12- CE Declaration: ............................................................................................................................... 23
2
1- Product Description
The Round Solutions PingPong is an embedded IoT/M2M hardware platform made for Software
Developers. The platform supports extension boards that add unlimited capabilities. It can be used
to easily make physical devices that connect to the web. It’s literally plug, push and play.
PingPong comes with both wired and wireless connectivity. The device is available in two opensource SW versions. While the RTOS version comes with the world’s fastest 32-bit microcontroller
running in C/C++, the Linux version uses the powerful ARM Cortex processor for even more
functionality and applications. PingPong base circuit boards also have a high speed Telit cellular
module, a high accuracy positioning component for the Global Navigation Satellite System (GNSS),
Ethernet, USB, CANBUS among other items. The Evaluation Kit comes with a dedicated M2M/IoT
SIM card and connectivity to a cloud platform.
2- Key Benefits
Easy to integrate with other devices & sensors using USB HS, UART, Ethernet, SPI, I2C, CAN, and
user definable GPIOs
Increased connectivity performance with 2G/3G/4G, Wi-Fi and Bluetooth
Ideal platform for m2m applications and mobile data and computing devices with ultra-compact
design and extended operating temperature range
Combines high-speed wireless connectivity combined with embedded multi-constellation high-
sensitivity positioning GPS + GLONASS receiver
Internet friendly with integrated TCP/IP and UDP/IP stacks
Simple drop-in migration and technology design reuse path to 2G, 3G and 4G² with any Telit
xE910 cellular module
Over-the-Air firmware update
Wide range power supply input 9-60 V DC
3- Product Features
IoT Gateway with wired and wireless communication channels and interfaces
Extendable through an unlimited number of Plug’n’Play hardware extension boards
Wireless communication: Telit XE910 cellular family
o 2G, 3G and 4G²
High Performance GNSS: Telit SL869
o GPS, Glonass, Galileo
o For Tracking, Timing and Dead Reckoning (available on request)
2x SIM card holder and SIM on chip
Watchdog: Hardware Watchdog for the microcontroller
Configurable over Ethernet, USB and/or SMS
Out of the box connectivity with
o Cumulocity IoT Cloud Platform
o Telit m2mAIR Cloud
TCP and UDP Data Protocols
Accelerometer on board
Magnetometer on board (E-Compass)
RTOS Version:
o World’s fastest 32-bit microcontroller with 200 MHz (Microchip PIC32MZ)
o 4 MB Flash memory
Linux Version:
o ARM Cortex A8 Processor
3
o 32 MB Flash memory
o 128 MB RAM
4- Interfaces
Connectors for unlimited stackable extension boards
Ethernet interface
USB interface
USB interface directly with the Telit Cellular module
1 x CAN interface
2 x Frequency inputs
2 x Analog inputs
4 x Three state logic inputs
4 x NMOSFET outputs
2 x Current measurement inputs (24 bits resolution with galvanic isolation)
1 x 1-Wire interface
Antenna Connectors
o GSM: U.FL Connector
o GNSS: U.FL Connector
5- Development Enviroment:
The RTOS version of the PingPong board uses the Microchip PIC32MZ2048ECM144 microcontroller.
MPLABX from microchip along with XC32 complier are the IDE and complier used in developing
applications and modifying the firmware. Both the IDE and the complier can be downloaded from
Microchip’s website. The IDE is free of charge and the complier comes with 60 days free trial and
then a license can be purchased or can be used for free with some limitations.
Microchip MPLABX: http://www.microchip.com/pagehandler/en-us/family/mplabx/
Microchip XC32 Complier: http://www.microchip.com/pagehandler/en_us/devtools/mplabxc/
It is also strongly recommended to download Microchip MPLAB Harmony Integrated Software
Framework. Microchip MPLAB Harmony allows the developer to configure the project to use
different stacks and configures peripherals easily. It can be found on this link:
http://www.microchip.com/pagehandler/en-us/devtools/mplabharmony/home.html
Refer to Installing a Plug-in Module inside the MPLAB Harmony help file for a guide to add it as a
plug in to the MPLABX IDE.
MPLAB Harmony comes with a set of examples that demonstrates the use of all the peripherals. All
examples can be configured to use the Microchip PIC32MZ2048ECM144 microcontroller by changing
it from the project properties, and then launching the MPLAB Harmony configurator to generate
compatible code for the new Microcontroller without deleting any of the added code such as USB
descriptors.
4
6- Downloading Firmware to the PingPong board:
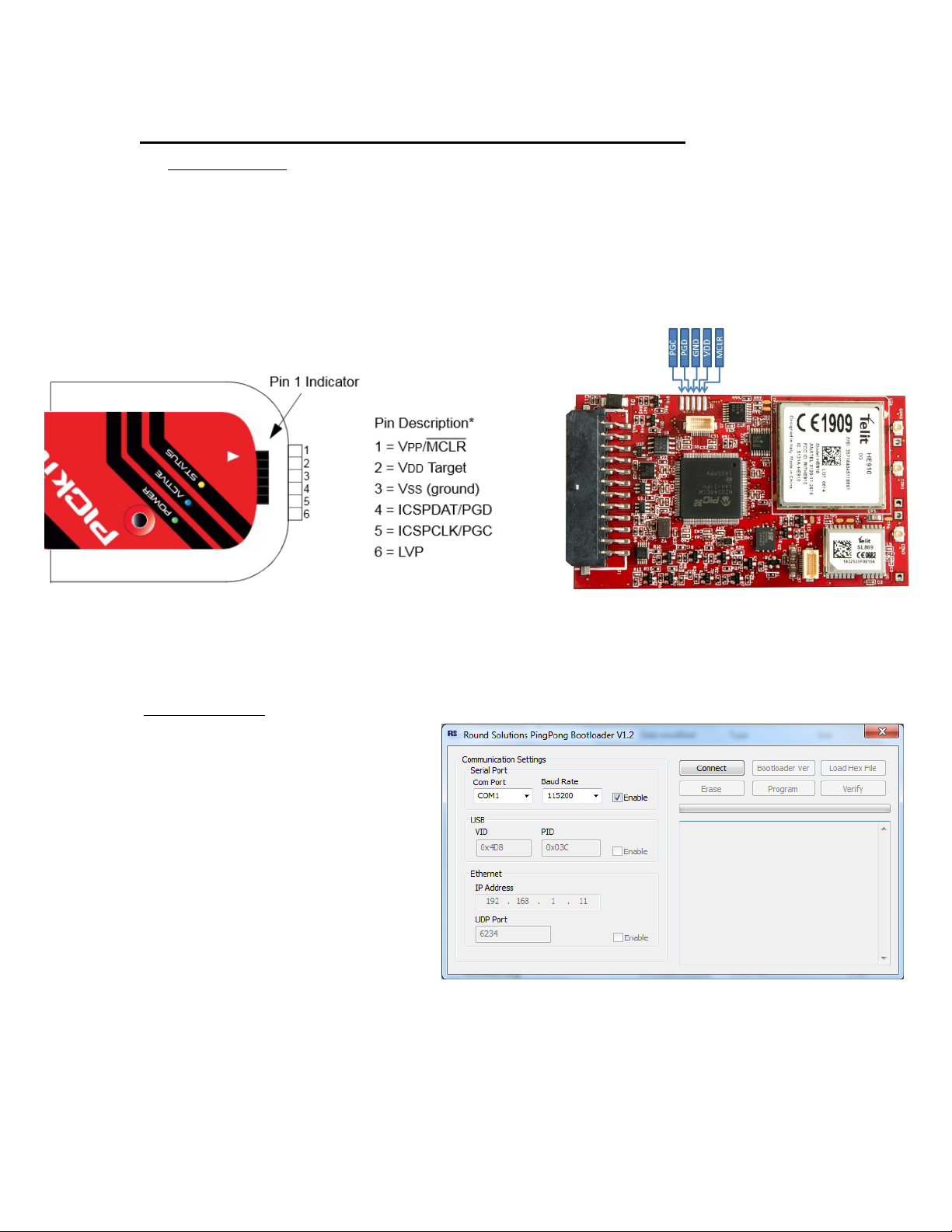
a- PIC Programmer:
The PingPong board has 5 SMD pins for downloading a firmware to the microcontroller on board.
The pins are referenced in the picture below and are from right to left: Master clear (MCLR), VDD,
GND, PGD, and PGC. A non-expensive programmer is Microchip PicKit3 programmer which can be
used to download the firmware. Pinouts are shown below. Other programmer and emulators such
as ICD3 and REAL ICE are available from Microchip for
extensive debugging.
Fig (a)
The Microchip PICKit3 is integrated with MPLABX and the firmware can downloaded directly from
the IDE when it is connected to it.
b- USB Boot Loader:
Alternatively, hex files can be
downloaded via USB CDC. Digital input 4
(DI4) has to be tied to ground to lunch
the Boot Loader in the PingPong on
power up. The Bootloader software is
used to download hex files. The steps
are Connect Load Hex File Erase
Program Verify. As USB CDC creates a
virtual COM Port, the user has to select
the proper COM port and set the baud
are to 115200 for prompt download of
hex files. Fig (b)
Once Connect is clicked, the application requests the version of the boot loader inside the
PingPong. The current version should be higher than 1.4. Hex files that will be downloaded with the
Projects output that will be downloaded using the Bootloader should have their the linker script
5
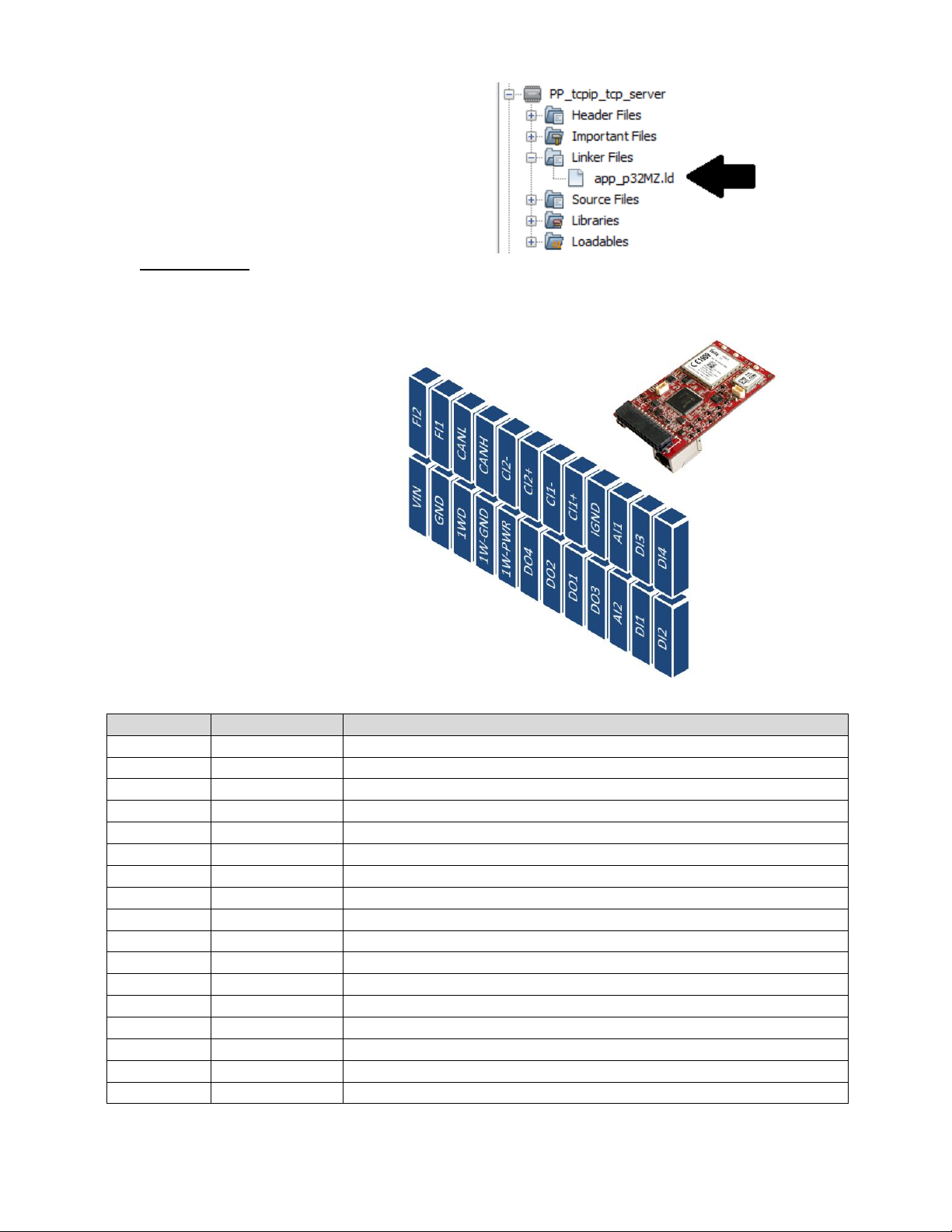
“app_p32MZ.ld” added to the linker folder
Pin Number
Pin Name
Pin Description
1
VIN
Input voltage to the board. 9 to 60VDC
2
GND
Ground input to the board
3
1WD
1 Wire data interface
4
1W-GND
1W-GND interface (with isolation)
5
1W-PWR
1W-Power interface (with Isolation)
6
DO4
Digital output (PMOSFET) – outputs voltage equal VIN when triggered
7
DO2
Digital output (NMOSFET) - outputs GND when triggered
8
DO1
Digital output (PMOSFET) – outputs voltage equal VIN when triggered
9
DO3
Digital output (NMOSFET) - outputs GND when triggered
10
AI2
Analog input 2. 0-30 VDC input with 10 bits resolution
11
DI1
Digital Input 1. 0.7 to 30VDC DC to trigger a logic 1
12
DI2
Digital Input 2. 0.7 to 30VDC DC to trigger a logic 1
13
DI4
Digital Input 4. 0.7 to 30VDC DC to trigger a logic 1
14
DI3
Digital Input 3. 0.7 to 30VDC DC to trigger a logic 1
15
AI1
Analog input 1. 0-30 VDC input with 10 bits resolution
16
IGND
Ground from the isolated part of the current measurement circuit
17
CI1+
Current input 1 + (4-20mA current measurement with isolation)
before compilation. Each project has its own
linker script inside the src folder.
7- PIN Outs:
The picture on the right shows the pinout of the PingPong board. The table below provides a
description about each pin.
Fig (c)
6
18
CI1-
Current input 1 -
19
CI2+
Current input 2 + (4-20mA current measurement with isolation)
20
CI2-
Current input 2 -
21
CANH
CAN High
22
CANL
CAN Low
23
FI1
Frequency counter input 1
24
FI2
Frequency counter input 1
Module
UART1
UART2
SL869
GNSS
SPI 5
Flash
4MB
I2C
CAN
Transceiver
CAN
SPI 4
4-20mA
measurement
Ethernet
USB
I/O
ADC
1-Wire
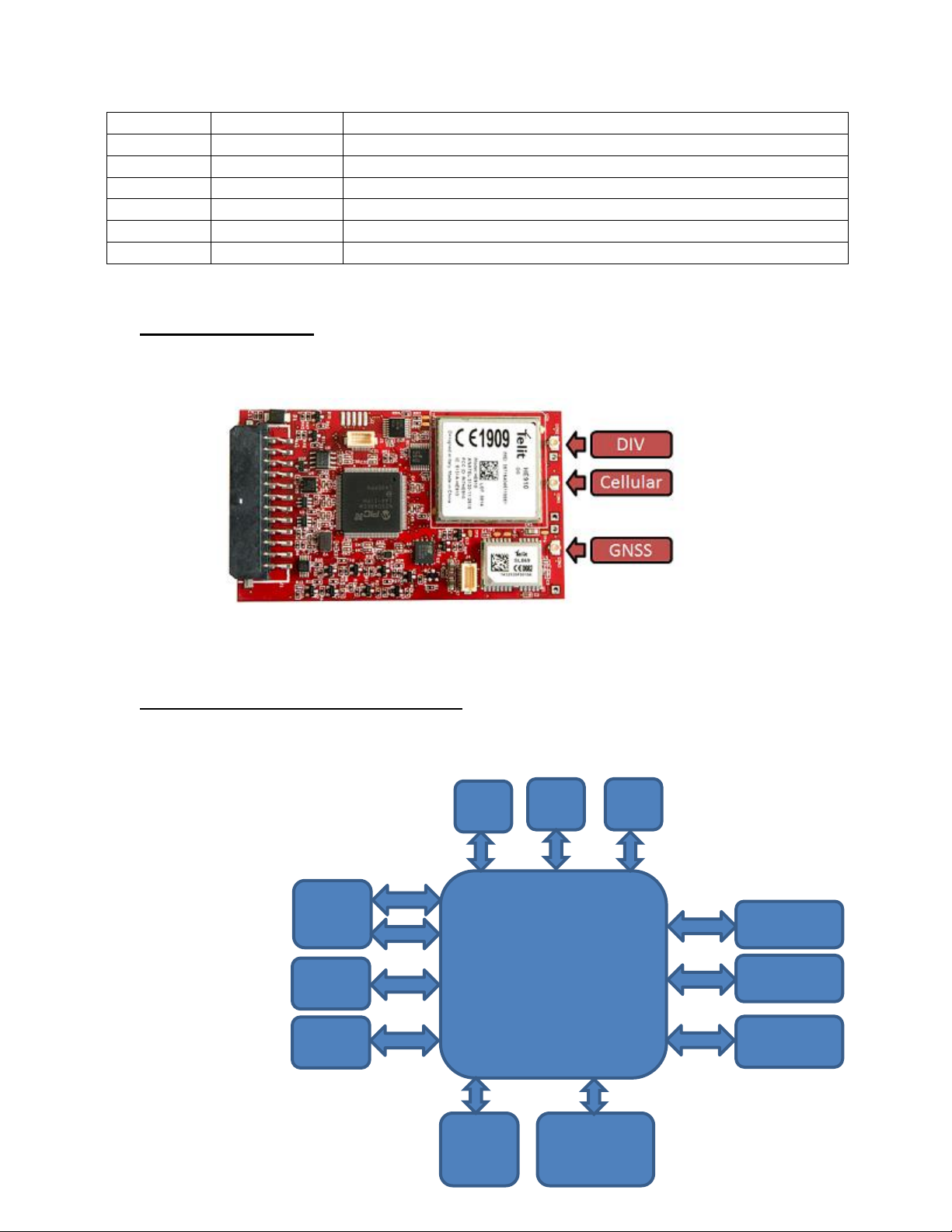
8- RF Connectors:
The PingPong board has three UFL connectors on board as shown in the picture below.
Fig (d)
The GNSS connector has a 3V DC voltage to power the active antenna connected to it.
9- Inter-modules Connections:
The following figure shows the inter connections between the Microchip PIC32 microcontroller and all
the other modules on
board:
Fig (e)
XE910
Memory
PIC32
Accelerometer
Magnetometer
7
 Loading...
Loading...