


参考手册
00809-0106-4804, DA 版
2018 年 10 月
Rosemount™ 3051S 电子远程传感器 (ERS)
™
系统


参考手册
00809-0106-4804, DA 版
目录
1 第 1 节:引言
2 第 2 节:安装
目录
2018 年 10 月
1.1 本手册使用说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 产品回收利用/处置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2.1 概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 安全信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.3 涵盖的型号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.4 考虑因素 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.4.1 常规 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.4.2 机械 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.4.3 环境 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.5 安装步骤 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.5.1 识别罗斯蒙特 ERS 传感器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.5.2 安装每个罗斯蒙特 ERS 传感器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.5.3 过程连接件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5.4 考虑外壳的转动 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5.5 组态安全和报警 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.5.6 接线并通电 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.5.7 接地 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.6 罗斯蒙特阀组 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.6.1 罗斯蒙特 305 阀组的安装步骤 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.6.2 罗斯蒙特 304 阀组的安装步骤 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.6.3 罗斯蒙特 306 阀组的安装步骤 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.6.4 阀组的阀门组态 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3 第 3 节:组态
3.1 概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2 安全信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2.1 把回路设置为手动模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
目录
3.3 接线图 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.4 基本设置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.4.1 设备位号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.4.2 Units of measure (测量单位) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.4.3 Damping (阻尼) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
i

目录
2018 年 10 月
参考手册
00809-0106-4804, DA 版
3.4.4 Variable mapping (变量映射) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.4.5 模拟输出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.4.6 报警和饱和水平 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.5 附加组态 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.5.1 就地显示 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.5.2 阵发模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.5.3 多点通讯 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.5.4 换算变量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.5.5 模块分配 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.5.6 过程警报 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.6 HART 菜单树 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4 第 4 节:操作和维护
4.1 概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.2 安全信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.3 标定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.3.1 标定概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.3.2 P
4.3.3 DP 标定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.3.4 模拟输出调整 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.3.5 调用工厂调校 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.4 功能测试 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.4.1 查找设备 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.5 现场升级和更换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.5.1 分解的考虑因素 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.5.2 标记 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.5.3 拆卸接线端子板 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.5.4 拆卸电子部件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.5.5 从外壳拆卸 SuperModule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.5.6 把 SuperModule 连接到外壳 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.5.7 安装电子组件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.5.8 安装接线端子板 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.5.9 重新组装过程法兰 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
和 PLO 传感器标定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
HI
5 第 5 节:故障排除
5.1 概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.2 设备概览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
ii
目录

参考手册
00809-0106-4804, DA 版
6 第 6 节:安全仪表系统要求
A 附录 A:参考数据
目录
2018 年 10 月
5.2.1 HART 主机诊断 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.2.2 LCD 显示屏上的诊断信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.3 测量质量状态 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.4 服务支持 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6.1 安全仪表系统 (SIS) 认证 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.1.1 罗斯蒙特 ERS 系统安全认证标识 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.1.2 在 SIS 应用中安装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.1.3 在 SIS 应用中组态 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.1.4 罗斯蒙特 3051S SIS 操作和维护 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.1.5 检查 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
A.1 产品认证 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
A.2 订购信息、技术规格和图纸 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
A.3 备件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
目录
iii

目录
2018 年 10 月
参考手册
00809-0106-4804, DA 版
iv
目录

参考手册
注意
小心
00809-0106-4804, DA 版
Rosemount™ 3051S 电子远程传感器
(ERS)™ 系统
使用产品前请阅读本手册。为保证人身及系统安全以及获得最佳的产品性能,安装、使用或维护本产
品前一定要完全了解手册内容。
技术支援的联系信息如下:
客户中心
技术支持、报价及订购相关问题。
美洲:1 800 999 9307
欧洲:+41 (0) 41 768 6111
中东:+971 4 811 8100
亚洲:+65 6777 8211
北美响应中心
设备维修需求。
1-800-654-7768 (24 小时 – 包括加拿大)
若处于这些区域之外的地区,请与您当地的 Emerson
™
代表联系。
扉页
2018 年 10 月
本文档描述的产品不是专为核工业级应用而设计的。在需要核工业级硬件或产品的应用场合,若使用
非核工业级产品会导致读数不精确。
有关罗斯蒙特核工业级产品的信息,请与本地艾默生销售代表联系。
扉页
v

扉页
警告
2018 年 10 月
参考手册
00809-0106-4804, DA 版
不遵守这些安装指导可能导致死亡或严重受伤。
确保仅由具备资质的人员进行安装。
爆炸可能会导致死亡或严重伤害。
当电路带电时,请不要在易爆环境中拆除壳体盖子。
在易爆环境中连接现场手持通讯器之前,应确保回路中的仪器是按照本质安全或非易燃现场接线
惯例安装的。
为满足防火/防爆要求,两个壳体盖子都必须完全盖上。
应验证变送器的工作环境是否与相应的危险场所认证一致。
触电可能导致死亡或严重受伤。
如果罗斯蒙特 ERS 系统安装在高电压环境中并出现故障或安装错误,则传感器引线和端子上可能
存在高压。
在与导线和端子接触时,应极其小心。
过程泄漏可能导致死亡或严重受伤。
在加压前,应安装并拧好全部四个法兰螺栓。
当罗斯蒙特 ERS 系统处于工作状态时,不得试图松开或拆卸法兰螺栓。
若把未经艾默生认可的更换设备或备件用作配件,则可能降低变送器的保压能力,并给仪表带来
危险。
只能使用由艾默生提供或销售的螺栓作为配件。
若阀组与传统法兰的组装不当,则可能损坏设备。
为了安全地把阀组与传感器法兰组装到一起,螺栓必须挤入法兰腹板的背面 (即,螺栓孔),但不得
与传感器模块接触。
静电可能损坏敏感部件。
应注意对静电敏感的部件的安全拿放注意事项。
vi
扉页

参考手册
00809-0106-4804, DA 版
第 1 节引言
1.1 本手册使用说明
本手册的章节说明如何安装、操作和维护采用 HART® 协议的 Rosemount™ 3051S 型电子远程传感器
(ERS)™ 系统。这些章节如下组织:
第 2 节:安装包含机械和电气安装说明,以及现场升级选项。
第 3 节:组态提供调试和操作罗斯蒙特 ERS 系统的说明。还包括软件功能、配置参数和在线变量的
信息。
第 4 节:操作和维护包含操作和维护技术。
第 5 节:故障排除提供针对最常见操作问题的故障处理技术。
第 6 节:安全仪表系统要求 包含 SIS 应用的所有认证和操作信息。
附录 A:参考数据提供参考和技术规格数据以及订购信息。
1.2 产品回收利用/处置
引言
2018 年 10 月
应考虑设备及包装的回收利用,并根据地方及国家法律/法规进行处理。
引言
1

引言
2018 年 10 月
参考手册
00809-0106-4804, DA 版
2
引言

参考手册
警告
00809-0106-4804, DA 版
第 2 节安装
概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 3 页
安全信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 3 页
涵盖的型号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 4 页
安装步骤 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 9 页
罗斯蒙特阀组 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 22 页
2.1 概述
本节介绍 Rosemount™ 3051S 电子远程传感器 (ERS)™ 系统的安装考虑事项。每个罗斯蒙特 3051S ERS
变送器随带有快速安装指南,其中介绍了基本安装、接线、组态和启动程序。产品数据表
罗斯蒙特 3051S ERS 变送器的尺寸图。
安装
2018 年 10 月
中包含每种
2.2 安全信息
执行操作时,为确保人身安全,请特别注意本节中的步骤和说明。可能引起潜在安全问题的信息用警
告符号 () 表示。执行带有该符号的操作前,请参阅以下安全信息。
不遵守这些安装指导可能导致死亡或严重受伤。
确保仅由具备资质的人员进行安装。
爆炸可能会导致死亡或严重伤害。
当电路带电时,请不要在易爆环境中拆除壳体盖子。
在易爆环境中连接现场手持通讯器之前,应确保回路中的仪器是按照本质安全或非易燃现场接线
惯例安装的。
为满足防火/防爆要求,两个壳体盖子都必须完全盖上。
应验证变送器的工作环境是否与相应的危险场所认证一致。
触电可能导致死亡或严重受伤。
如果罗斯蒙特 ERS 系统安装在高电压环境中并出现故障或安装错误,则传感器引线和端子上可能
存在高压。
在与导线和端子接触时,应极其小心。
安装
3

安装
警告
2018 年 10 月
参考手册
00809-0106-4804, DA 版
过程泄漏可能导致死亡或严重受伤。
在加压前,应安装并拧好全部四个法兰螺栓。
当罗斯蒙特 ERS 系统处于工作状态时,不得试图松开或拆卸法兰螺栓。
若把未经 Emerson
来危险。
只能使用由艾默生提供或销售的螺栓作为配件。
若阀组与传统法兰的组装不当,则可能损坏设备。
为了安全地把阀组与传感器法兰组装到一起,螺栓必须挤入法兰腹板的背面 (即,螺栓孔),但不得
与传感器模块接触。
静电可能损坏敏感部件。
请遵守对静电敏感的部件的安全拿放注意事项。
™
认可的更换设备或备件用作配件,则可能降低变送器的保压能力,并给仪表带
2.3 涵盖的型号
罗斯蒙特 ERS 系统是一种灵活的 2 线制 HART® 架构,可使用两个压力传感器以电子方式计算差压 (DP)。
压力传感器通过电缆互联并进行同步以形成单罗斯蒙特 ERS 系统。罗斯蒙特 ERS 系统中使用的传感器
可包含罗斯蒙特 3051SAM 和 3051SAL 型的任何组合。一个传感器需要作为 “ 主用 ”,另一个需要作为
“ 备用 ”。
主用传感器包含 4—20 mA 回路终端和可选 LCD 显示屏。备用传感器由压力传感器模块和接线盒壳体构
成,使用标准仪表缆线连接到主用传感器。
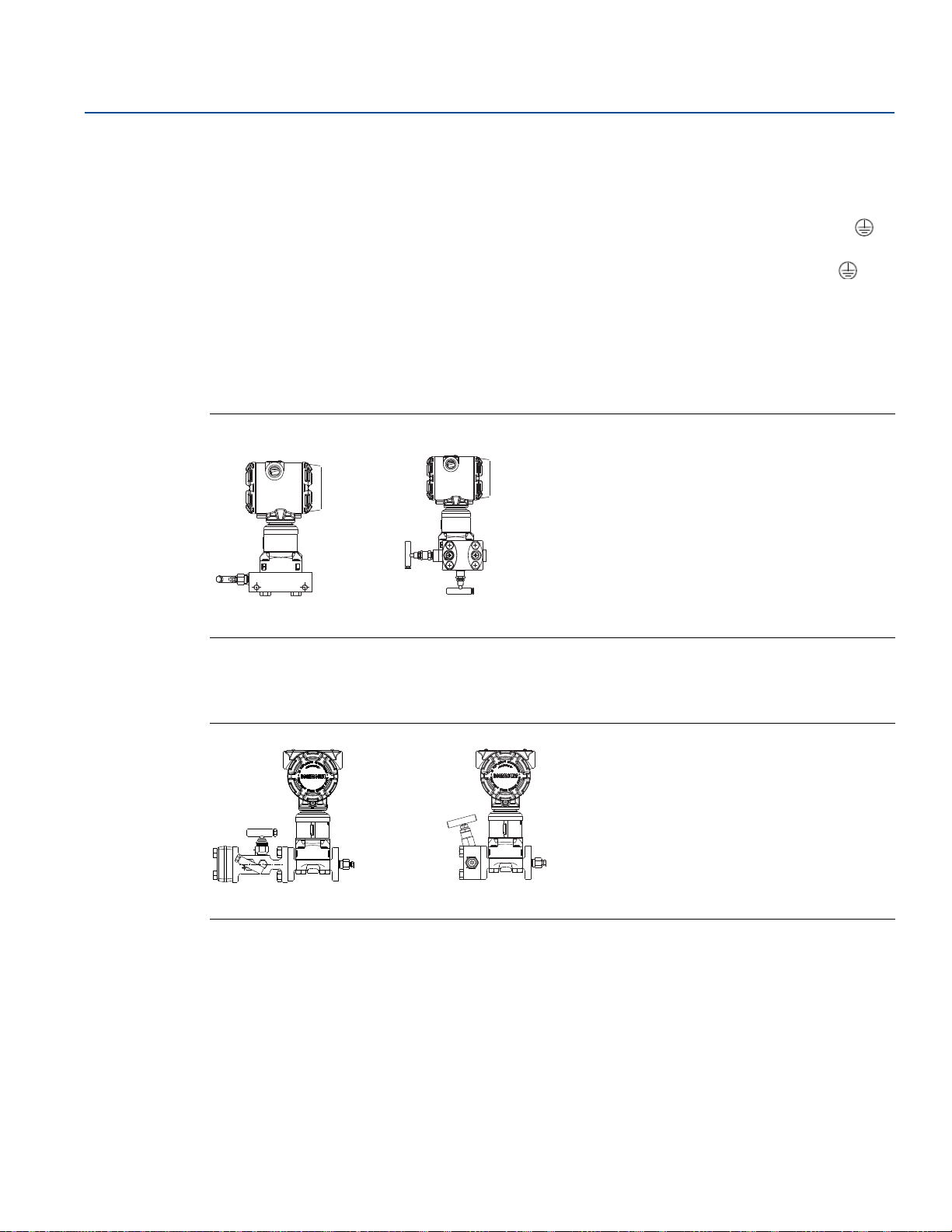
罗斯蒙特 3051SAM Scalable™ ERS 测量变送器
共平面和直连式传感器模块平台
各种过程连接件,包括 NPT、法兰、阀组和罗斯蒙特 1199 分体式膜片密封件
罗斯蒙特 3051SAL 可扩展 ERS 液位变送器
变送器和分体式膜片密封件集成在一个型号中
各种过程连接件,包括法兰、螺纹和卫生型分体式膜片密封件
罗斯蒙特 300ERS 外壳套件
升级现有的罗斯蒙特 3051S 变送器并将其转换为罗斯蒙特 3051S ERS 变送器。
轻松地为现有的罗斯蒙特 ERS 系统订购外壳和电子部件。
4
安装

参考手册
罗斯蒙特
直通式 3051SAM
(备用)
带 FF 密封件的罗斯蒙特
3051SAL 共平面式 (主用)
罗斯蒙特 3051SAM
直连式 (主用)
带 FF 密封件的罗斯蒙特
3051SAL 共平面式
™
(备用)
罗斯蒙特
3051SAM 直连式
(备用)
带 FF 密封件和分体式显示屏的罗斯
蒙特 3051SAL 共平面式 (主用)
00809-0106-4804, DA 版
图 2-1. 罗斯蒙特 ERS 型号和可能的组态
2.4 考虑因素
安装
2018 年 10 月
2.4.1 常规
测量性能取决于每个变送器和导压管是否正确安装。应把每个罗斯蒙特 3051S ERS 变送器安装在靠近
过程管线的位置,并使用尽可能小的导压管,以实现最佳性能。另外,还应考虑便于操作、确保人身
安全、便于现场标定以及合适环境的要求。每个传感器的安装方式应能最大限度地减少振动、冲击和
温度波动。
注
应在任何未用导线管开口上安装好随带的管堵 (在包装箱中)。直螺纹和锥形螺纹的正确啮合要求请
参阅产品数据表中的相应认证图。如需了解材料兼容性的考虑事项,请参考材质选择技术注释。
2.4.2 机械
尺寸图信息请参阅产品数据表。
对于过程温度高于每个罗斯蒙特 3051S ERS 变送器的限值的蒸汽管线或应用,不要通过任何一个传感
器排放导压管。利用截止阀冲洗管线,并且在恢复测量之前向管线注水。
如果罗斯蒙特 3051S ERS 变送器以侧装方式安装,应将法兰/阀组布置在适当的位置,确保正确排气或
排液。
外壳的现场端子侧
采用适当的方式安装每个罗斯蒙特 ERS 传感器,以便于接触到端子侧。需要留出 19 毫米(0.75 英寸)
的空隙以便拆下护盖。
安装
外壳的电子装置侧
对于不带 LCD 显示屏的设备,应留有 19 毫米 (0.75 英寸 ) 空隙。若安装有 LCD 显示屏,则需要三英寸
空隙,以便拆卸护盖。
护盖的安装
必须安装好电子装置外壳盖,使金属与金属接触,以确保正确密封,避免因环境影响而导致性能下降。
在更换护盖的 O 型圈时,应使用罗斯蒙特提供的 O 型圈 (部件号 03151-9040-0001)。
5

安装
A
B
2018 年 10 月
参考手册
00809-0106-4804, DA 版
导线管入口螺纹
为了满足 NEMA® 4X、IP66 和 IP68 要求,应在外螺纹上缠螺纹密封 (PTFE) 带或涂螺纹密封胶,以实现
不透水密封。
压盖螺钉
对于配有压盖螺钉的变送器外壳 (如图 2-2 中所示),在完成罗斯蒙特 ERS 系统接线和加电后,应正
确安装好螺钉。压盖螺钉的用途是在防火环境中起到阻止徒手拆卸外壳盖的作用。应按下列步骤安装
压盖螺钉:
1. 检查压盖螺钉是否已完全拧入到外壳中。
2. 安装好外壳盖,确保金属与金属接触,以满足防火/防爆要求。
3. 使用 M4 六角扳手按逆时针方向转动压盖螺钉,直到它与外壳盖接触。
4. 按逆时针方向再把压盖螺钉拧
5. 检查护盖是否能够拆卸。
图 2-2. 压盖螺钉
1
/2 圈,以紧固护盖。若施加扭矩过大,可能损坏螺纹。
A. 2⫻ 压盖螺钉 (每侧 1 个)
B. 压盖螺钉
2.4.3 环境
操作要求和盖的安装说明有助于使变送器性能最佳化。每个变送器的安装方式应最大限度地减少环境
温度变化、震动、机械冲击,并避免与外界侵蚀性材料发生接触。
注
罗斯蒙特 ERS 系统的设计中融入了附加电子保护功能。因此,ERS 系统不能用于浮动接地电压超过 50 Vdc
的应用 (例如,阴极保护)。请咨询艾默生销售代表以了解关于在相似应用中使用的附加信息和考虑
事项。
Plantweb
™
外壳 接线盒外壳
6
安装

参考手册
START HERE
Device Tagging
No
Bench
Commissioning?
Yes
Field Installation
Run “Basic Setup”
Wizard
Units of Measure and
Damping
Variable Mapping
4 and 20 mA Range
Points
Alarm and Saturation
Levels
Ver ify
Review Rosemount
ERS System
Configuration
Verif y PHI and PLO
Designations
Apply Pressure
No
Bench
Commissioning?
Yes
Refer to Section 4:
Operation and
Maintenance
Identify PHI and PLO
Rosemount ERS
Sensors
Mount Each
Rosemount ERS
Sensor
Consider Housing
Rotation
Set Switches
Connect Wiring and
Apply Power
Tri m R ose mou nt ER S
System for Mounting
Effects
Finish
00809-0106-4804, DA 版
图 2-3. 罗斯蒙特 3051S ERS 安装流程图
安装
2018 年 10 月
安装
7

安装
从此开始
设备位号
否
工作台调试?
现场安装
运行 “Basic Setup”
(基本设置)向导
测量单位和阻尼
变量映射
4 和 20 mA 范围点
报警和饱和水平
验证
审核罗斯蒙特 ERS
系统组态
验证 PHI 和 PLO 指定
加压
否
工作台调试?
是
请参阅第 4 节:
操作和维护
识别 PHI 和 PLO 罗斯
蒙特 ERS 传感器
安装每个罗斯蒙特
ERS 传感器
考虑外壳的转动
设置开关
接线并通电
根据安装影响调校罗
斯蒙特 ERS 系统
完成
是
2018 年 10 月
参考手册
00809-0106-4804, DA 版
8
安装

参考手册
或
00809-0106-4804, DA 版
2.5 安装步骤
2.5.1 识别罗斯蒙特 ERS 传感器
完整的罗斯蒙特 ERS 系统包含两个压力传感器。一个安装在高压 (PHI) 过程连接件上,另一个安装在低
压 (P
) 过程连接件上。如果需要,也可订购添加可选的分体式显示屏和接口。
LO
安装
2018 年 10 月
1. 查看罗斯蒙特 3051S ERS 变送器上的金属丝固定标牌,以确定它组态为 P
阅图 2-4)。
2. 定位将用于罗斯蒙特 ERS 系统的第二个传感器:
对于新安装或应用,第二个罗斯蒙特 ERS 传感器可能采用单独包装运输。
如果维修或更换现有罗斯蒙特 ERS 系统的部件,另一个传感器可能已经安装。
注
罗斯蒙特 3051S ERS 变送器出厂时已经过预组态,主用设备 (4—20 回路终端和可选 LCD 显示屏)指
定为 P
(例如,储罐顶部)的安装中,这些指定可利用 HART 手操器以电子方式切换 (请参阅第 32 页上的 “
就地显示 ”)。
图 2-4. 罗斯蒙特 ERS PHI 和 PLO 金属丝固定标牌
传感器,备用设备 (接线盒壳体)指定为 PLO 传感器。在主用变送器安装在 PLO 过程连接件
HI
还是 PLO 传感器 (请参
HI
2.5.2 安装每个罗斯蒙特 ERS 传感器
在适用于具体应用的正确过程连接件上安装 PHI and PLO 传感器。常见的罗斯蒙特 ERS 安装如图 2-5 中
所示。
竖直安装
在容器或蒸馏塔等竖直安装场合中,PHI 传感器应安装到底部过程连接件。PLO 传感器应安装到顶部过
程连接件。
水平安装
水平安装中, PHI 传感器应安装在上游过程连接件上。 PLO 传感器应在下游安装。
安装
9

安装
A
B
B
A
压降
2018 年 10 月
参考手册
00809-0106-4804, DA 版
图 2-5. 水平和竖直罗斯蒙特 ERS 安装
A. PLO 传感器
B. P
传感器
HI
安装支架
提供安装支架以便于将变送器安装到 2 英寸管道或面板。B4 不锈钢支架选件与共平面和直连式过程连
接件结合使用。第 12 页上的图 2-6 显示了 B4 支架的尺寸和安装组态。其它支架选件在表 2-1 中列出。
在把罗斯蒙特 3051S ERS 变送器安装到一个可选的安装支架时,应把螺栓拧紧到
0.9 牛 - 米(125 英寸 - 磅)。
表 2-1. 安装支架
选项 说明 安装类型 支架材料 螺栓材料
B4
B1
B2
B3
B7
B8
B9
BA
BC
共平面法兰支架 2 英寸管道/面板 不锈钢 不锈钢
传统法兰支架 2 英寸管道 涂漆碳钢 碳钢
传统法兰支架 面板 涂漆碳钢 碳钢
传统法兰扁平支架 2 英寸管道 涂漆碳钢 碳钢
传统法兰支架 2 英寸管道 涂漆碳钢 不锈钢
传统法兰支架 面板 涂漆碳钢 不锈钢
传统法兰扁平支架 2 英寸管道 涂漆碳钢 不锈钢
传统法兰支架 2 英寸管道 不锈钢 不锈钢
传统法兰扁平支架 2 英寸管道 不锈钢 不锈钢
10
安装

参考手册
碳钢 (CS) 螺栓头部标记
B7M
316
B8M
F593_*
不锈钢 (SST) 螺栓头部标记
* F593_ 螺栓头部标记的最后一位数字可以是
A 和 M 之间的任何字母。
F593_F
KM
660
CL A
合金 K-500 螺栓头部标记
00809-0106-4804, DA 版
法兰螺栓
罗斯蒙特 3051S ERS 变送器可随附共平面法兰或传统法兰,使用四个 1.75 英寸法兰螺栓安装。共平面
和传统法兰的安装螺栓和栓接组态可在表 2-2 中找到。由艾默生提供的不锈钢螺栓涂有润滑剂,以便
安装。碳钢螺栓不需要润滑。但是,安装任何一种螺栓时都不应额外涂敷润滑剂。由艾默生提供的螺
栓由其头部标记来标识:
螺栓安装
仅使用随罗斯蒙特 3051S ERS 变送器提供的螺栓,或者由艾默生作为备件销售的螺栓。请按照以下步
骤安装螺栓:
安装
2018 年 10 月
1. 用手指先拧紧螺栓。
2. 按交叉模式将螺栓拧至初始扭矩值。初始扭矩值请参阅表 2-2。
3. 按相同的交叉模式将螺栓拧至最终扭矩值。最终扭矩值请参阅表 2-2。
法兰和阀组适配器螺栓的扭矩值如下:
表 2-2. 螺栓安装扭矩值
螺栓材料 选项代码 初始扭矩值 最终扭矩值
CS-ASTM-A449
316 不锈钢 选项 L4 17 牛 - 米(150 英寸 - 磅) 34 牛 - 米(300 英寸 - 磅)
ASTM-A-193-B7M
合金 K-500 选项 L6 34 牛 - 米(300 英寸 - 磅) 73 牛 - 米(650 英寸 - 磅)
ASTM-A-453-660
ASTM-A-193-B8M
标准 34 牛 - 米(300 英寸 - 磅) 73 牛 - 米(650 英寸 - 磅)
选项 L5 34 牛 - 米(300 英寸 - 磅) 73 牛 - 米(650 英寸 - 磅)
选项 L7 17 牛 - 米(150 英寸 - 磅) 34 牛 - 米(300 英寸 - 磅)
选项 L8 17 牛 - 米(150 英寸 - 磅) 34 牛 - 米(300 英寸 - 磅)
安装
11

安装
A
B
C
A
D
A
B
C
D
2018 年 10 月
参考手册
00809-0106-4804, DA 版
图 2-6. 常见罗斯蒙特 3051S ERS 变送器/法兰组合
带共平面法兰的变送器
A. 44 mm (1.75 in.) ⫻ 4
B. 44 mm (1.75 in.) ⫻ 2
带共平面法兰和法兰接头的
变送器
C. 73 mm (2.88 in.) ⫻ 2
D. 38 mm (1.5 in.) ⫻ 2
带传统法兰和法兰接头的变送器
2.5.3 过程连接件
罗斯蒙特 3051S ERS 变送器法兰上的过程连接件尺寸为 1/4—18 英寸 NPT。对 于 D2 选项,有带1/4-18 NPT
1
至
/2-14 NPT 的连接件。在进行过程连接时,应使用经过工厂批准的润滑剂或密封剂。对于其他液位
法兰类型的连接件选项,请参考罗斯蒙特 1199 参考手册
在加压前,应安装并拧紧全部四个法兰螺栓,以避免渗漏。若安装正确,则法兰螺栓会从传感器模块
隔离器板的顶端探出。请参阅图 2-7。当变送器处于工作状态时,不得试图松开或拆卸法兰螺栓。
图 2-7. 传感器模块隔离器板
A. 螺栓
B. 传感器模块隔离器板
C. 共平面法兰
D. 法兰接头
。
12
安装

参考手册
警告
00809-0106-4804, DA 版
在把适配器安装到共平面法兰上时,应按以下步骤进行:
1. 卸下法兰螺栓。
2. 使法兰保持原位,把安装有 O 型圈的适配器移动到位。
3. 使用随带的较长螺栓把适配器和共平面法兰装到变送器的传感器模块组件上。
4. 拧紧螺栓。扭矩规格请参阅第 11 页上的表 2-2。
仅将法兰接头附带的 O 型圈用于罗斯蒙特 3051S ERS 变送器。未能安装适当的配件法兰接头 O 型圈
可能会造成过程泄漏,进而导致人员死亡或严重受伤。
拆卸法兰或接头时,应目视检查 PTFE O 型圈。如果有任何损坏的迹象(例如刻痕或切口),请予以更
换。若要更换 O 型圈,则在安装后应重新拧紧法兰螺栓,以补偿 PTFE O 型圈的变形。
导压管
过程介质和每个罗斯蒙特 3051S ERS 变送器之间的导压管必须精确地传递压力,以获得精确测量值。
可能的误差来源有很多:压力传递、渗漏、摩擦损耗 (尤其是在使用吹扫功能时)、液体管线中夹杂
气体、气体管线中混入液体,以及导压管堵塞。
安装
2018 年 10 月
每个罗斯蒙特 3051S ERS 变送器的最佳位置取决于过程自身。应按以下指导原则来确定传感器的位置
和导压管的布置:
应使导压管尽可能短。
对于液体管线,应使导压管从变送器向过程连接件向上倾斜至少 8 厘米/米(1 英寸/英尺)。
对于气体管线,应使导压管从变送器向过程连接件向下倾斜至少 8 厘米/米(1 英寸/英尺)。
在液体管线中,应避免安装在高点;在气体管线中,应避免安装在低点。
在吹扫时,应使吹扫连接件靠近过程分流接头,并通过相同规格、相同长度的管来吹扫。避免通过
任何一个罗斯蒙特 3051S ERS 变送器进行吹扫。
应避免侵蚀性或高温 (高于 121°C 或 250°F) 过程材料与传感器模块过程连接件和法兰直接接触。
应防止导压管中发生沉积。
注
应采取必要的步骤以防止过程流体在过程法兰内冻结,以避免损坏每个罗斯蒙特 3051S ERS 变送器。
注
安装之后,应验证每个罗斯蒙特 3051S ERS 变送器的零点。要重置零点调校,请参阅第 48 页上的 “ 标
定概述 ”。
安装
13

安装
A
A
2018 年 10 月
2.5.4 考虑外壳的转动
外壳转动
外壳可以转动,以便进行操作或接线,或者更好地查看可选的 LCD 显示屏 (如果订购)上的内容。
可按以下步骤转动外壳:
1. 拧松外壳限位螺钉。
2. 把外壳从其原始位置 (发货时的位置)向左或向右转动 180°。
注
在未完成拆卸步骤之前,外壳相对于原始位置的转动不得超过 180° (请参阅第 53 页)。转动过大可
能切断传感器模块和电子部件功能板之间的电气连接。
3. 重新拧紧外壳上的转动限位螺钉。
图 2-8. 外壳转动
Plantweb 外壳 接线盒外壳
参考手册
00809-0106-4804, DA 版
14
A. 外壳旋转限位螺钉 (3/32 in.)
LCD 显示屏的转动
除了转动外壳之外,还可按 90° 的增量旋转主用罗斯蒙特 ERS 传感器上的可选 LCD 显示屏,方法为:
按压两个舌片,拔出显示屏,转动并重新卡入到位。
注
如果意外地从电子部件功能板上拔下了 LCD 显示屏固定销,在把 LCD 显示屏重新卡入位之前,应重新
插入该固定销。
安装

参考手册
B
A
00809-0106-4804, DA 版
2.5.5 组态安全和报警
安全开关
利用罗斯蒙特 3051S ERS 主用变送器的电子部件功能板上的安全 (写入保护)开关,能够防止对罗斯
蒙特 ERS 系统组态进行更改。开关的位置请参阅图 2-9。把开关置于 “ON”(开)位置能够防止意外或
蓄意更改罗斯蒙特 ERS 系统组态。
如果写入保护开关处于 “ON”(开)位置,那么罗斯蒙特 ERS 系统不会接受任何向其存储器 “ 写入 ” 的
动作。当安全开关设置为 “ON” (开)状态时,不能进行组态变更,例如数字调校和重设量程范围。
报警方向
罗斯蒙特 ERS 系统的模拟输出的报警方向通过重新定位主用变送器的电子部件功能板上的报警开关来设
置。开关位于 “HI” (高)位置可使罗斯蒙特 ERS 系统在故障条件下进入高位报警状态,开关位于 “LO”
(低)位置可使系统在故障条件下进入低位报警状态。报警和饱和水平的详情请参阅第 31 页上的 “ 报警
和饱和水平 ”。
开关组态程序
按下面的程序来改变硬件开关位置:
安装
2018 年 10 月
1. 当电路带电时,请不要在易爆环境中拆除壳体盖子。如果罗斯蒙特 3051S ERS 系统带电,则应把回
路设置为手动模式,并断开电源。
2. 在罗斯蒙特 3051S ERS 主用变送器上,拆下现场端子对侧的外壳护盖。
3. 使用小号螺丝刀将报警和安全开关切换至所需位置。
4. 装回外壳护盖。护盖必须完全啮合,使金属接触金属以满足防火/隔爆要求。
图 2-9. 报警和安全开关
A. 安全开关
B. 报警开关
安装
15

安装
2018 年 10 月
2.5.6 接线并通电
典型罗斯蒙特 ERS 系统
1. 取下两个罗斯蒙特 3051S ERS 变送器上标有 “Field Terminals” (现场端子)的外壳盖。
2. 根据第 17 页 中详述的技术规格,使用罗斯蒙特 ERS Madison 缆线(如果订购)或等效的 4 线屏蔽
组件,按照图 2-10 连接两个传感器之间的 1、 2、 A 和 B 端子。确保电线上均匀捻拢的部分尽可能
靠近螺纹接线端子。
3. 通过将罗斯蒙特 3051S ERS 主用变送器的 “+” 和 “-” PWR/COMM 端子分别连接到正极和负极引线,
将罗斯蒙特 ERS 系统连接到控制回路。
4. 塞好并密封所有未用的导线管接口。
5. 根据实际情况,可在安装接线时加装滴水圈。布置滴水环时,应保证其底部低于导线管接口和变送
器外壳。
6. 重新装好并拧紧两个传感器的外壳盖,使金属与金属接触,以满足隔爆要求。
带可选分体式显示屏和接口的罗斯蒙特 3051S ERS 系统
1. 取下两个罗斯蒙特 ERS 传感器和远程外壳上标有 “Field Terminals” (现场端子)的外壳盖。
参考手册
00809-0106-4804, DA 版
2. 根据第 17 页 中详述的技术规格,使用罗斯蒙特 ERS Madison 电缆(如果订购)或等效的 4 线屏蔽
组件,以 “ 树形 ” ( 图 2-11) 或 “ 菊花链 ”( 图 2-12) 组态连接两个传感器和远程外壳之间的 1、2、A
和 B 端子。确保电线上均匀捻拢的部分尽可能靠近螺纹接线端子。
3. 通过将远程外壳的 “+” 和 “-” PWR/COMM 端子分别连接到正极和负极引线,将罗斯蒙特 ERS 系统连
接到控制回路。
4. 塞好并密封所有未用的导线管接口。
5. 根据实际情况,可在安装接线时加装滴水圈。布置滴水环时,应保证其底部低于导线管接口和变送
器外壳。
6. 重新装好并拧紧所有外壳盖,使金属与金属接触,以满足隔爆要求。
注
感应负载大于 1 mH 的本安栅不应与罗斯蒙特 ERS 系统配合使用,否则可能会导致设备无法正常工作。
16
安装

参考手册
00809-0106-4804, DA 版
罗斯蒙特 3051S ERS 系统电缆规格
电缆类型:建议使用灰色 Madison 04ZZXLF015 电缆、蓝色 Madison 04ZZXLF021 电缆和 Southwire
HLX-SPOS 两对铠装电缆。可以使用其它同等的电缆,只要其采用独立的屏蔽双绞线线芯并带有外屏
蔽层。电源线 (插针端子 1 和 2)必须至少为 22 AWG 电缆,通讯线 (插针端子 A 和 B)必须至少
为 24 AWG 电缆。
电缆最大长度:用于连接 ERS 主用变送器、备用变送器和分体式显示屏 (如果订购)的电线总长度
不应超过下面的最大长度。
— Madison (灰色电缆):非本安应用不超过 152.4 米(500 英尺),本安应用不超过
— Madison (蓝色电缆):本安应用不超过 68.58 米(225 英尺)
— 铠装电缆:不超过 38.1 米(125 英尺)
对于 SIS 最大长度,请参阅第 65 页上的 “ 罗斯蒙特 ERS 系统安全认证标识 ”
电缆电容:接线后通讯线路之间的总电容必须小于 5,000 皮法。按此要求, 100 英尺电缆的规格不
超过 164 皮法/米(50 皮法/英尺)的电缆长度。
灰色和蓝色电缆外径:6.86 毫米 (0.270 英寸)
铠装电缆外径:19.3 毫米 (0.76 英寸)
对于铠装电缆,包装中随附有电缆压盖
安装
2018 年 10 月
68.58 米(225 英尺);对于超过 500 英尺的应用,请咨询艾默生
4–20 mA 回路接线技术规格
建议采用双绞线进行接线。为了确保正确通讯,应使用 24 至 14 AWG 线,并且长度不应超过
1,500 米 (5,000 英尺 )。
注
连接和屏蔽方法有四种,都需要针对运行正确组态。任何机制都不会导致来自物理连接的消息重新
排序。
浪涌/瞬变
罗斯蒙特 3051S ERS 系统能够承受通常在静电放电或感应开关瞬变时出现的能量级别的电气瞬变。但
是,高能瞬变 (例如在雷击点附近的接线中感应的瞬变)可能损坏罗斯蒙特 ERS 系统。
可选的瞬变保护接线端子
可按已安装选件(选项代码 T1)或备件来订购瞬变保护接线端子,以改造现场现有的罗斯蒙特 ERS 系
统。接线端子上的雷电标志表明其具有瞬变保护功能。
注
瞬态接线端子仅在主用罗斯蒙特 3051S ERS 变送器上可用。如果订购并安装,带瞬态接线端子的主用
罗斯蒙特 3051S ERS 变送器将可保护整个罗斯蒙特 ERS 系统,包括备用罗斯蒙特 3051S ERS 变送器。
电源要求
安装
直流电源应提供波动性低于 2% 的电力。总回路电阻是信号引线的电阻以及控制器、指示器和配套件的
负载电阻之和。注意,若使用本质安全栅,则必须包括本质安全栅的电阻。
17

安装
A
C
B
接线图例
电线 端子连接件
红色
1
黑色
2
白色
A
蓝色
B
2018 年 10 月
参考手册
00809-0106-4804, DA 版
注
与现场通讯器通讯需要至少 250 欧姆回路电阻。如果使用一个电源来为一个以上的罗斯蒙特 ERS 系统
供电,那么在 1200 Hz 时,所用的电源以及变送器的共用回路的阻抗不应超过 20 欧姆。
图 2-10. 典型罗斯蒙特 3051S ERS 系统的接线
+
PWR/
COMM
_
1
1
2
㓵㠩 ERS ѱ⭞
AB
⎁䈋
㓵㠩
2
ERS ༽⭞
_
B
A
A. 现场手操器
B. 电源
C. HART 通讯所需的 250
电阻器
18
安装

参考手册
⎁䈋
PWR/
COMM
+
_
_
1
2AB
㓵㠩 ERS ѱ⭞
1
2AB
㓵㠩 ERS ѱ⭞
1
2
A
B
㓵㠩
ERS ༽⭞
A
C
B
接线图例
电线
端子连接件
红色
1
黑色
2
白色
A
蓝色
B
A
C
B
接线图例
电线
端子连接件
红色
1
黑色
2
白色
A
蓝色
B
00809-0106-4804, DA 版
图 2-11. 采用 “ 树形 ” 组态的带远程显示器的罗斯蒙特 3051S ERS 系统的接线
安装
2018 年 10 月
安装
A. 现场手操器
B. 电源
C. HART 通讯所需的 250
电阻器
图 2-12. 采用 “ 菊花链 ” 组态的带远程显示器的罗斯蒙特 3051S ERS 系统的接线
+
PWR/
COMM
1
_
⎁䈋
1
2AB
㓵㠩 ERS ѱ⭞
A. 现场手操器
B. 电源
C. HART 通讯所需的 250
电阻器
1
㓵㠩 ERS ѱ⭞
2
A
B
㓵㠩
2
ERS ༽⭞
_
B
A
19

安装
㓵㠩
ERS
༽⭞
B
A
F
D
E
C
2018 年 10 月
2.5.7 接地
环形线路
不要将信号线与电源线一起穿过导线管或开式桥架,或使信号线靠近重型电气设备。在信号回路的任
意一点把信号接线的屏蔽层接地。请参阅图 2-13。建议把电源的负极端子作为接地点。
注
使用螺纹导线管连接将变送器接地可能不足以满足接地要求。除非变送器外壳正确接地,否则瞬变保
护接线端子(选项代码 T1)不能提供瞬变保护。不要把瞬变保护接地线与信号线一起走线;若发生雷
击,则接地线可能承载过高电流。
图 2-13. 环形线路接地 (罗斯蒙特 3051S ERS 主用变送器)
参考手册
00809-0106-4804, DA 版
A. 正极
B. 最大限度减小距离
C. 修剪屏蔽层并绝缘
D. 绝缘屏蔽层
E. 把屏蔽层连回电源的负极端子
F. 负极
20
安装

参考手册
1
2AB
㓵㠩 ERS ѱ⭞
1
2AB
㓵㠩 ERS ѱ⭞
1
2
A
B
㓵㠩
ERS ༽⭞
⎁䈋
A
A
A
A
A
A
00809-0106-4804, DA 版
屏蔽层接地
将 Madison 电缆组件的屏蔽层连接到每个外壳,如 图 2-14 中适用的接线组态所示。
图 2-14. 屏蔽层接地
1
㓵㠩 ERS ѱ⭞
2
AB
安装
2018 年 10 月
1
⎁䈋
㓵㠩
2
ERS ༽⭞
B
A
1
2AB
㓵㠩 ERS ѱ⭞
A. 电缆屏蔽层
1
1
2AB
㓵㠩 ERS ѱ⭞
⎁䈋
㓵㠩
2
ERS ༽⭞
B
A
安装
21
安装
共平面式
传统式
传统式
对夹式
2018 年 10 月
变送器外壳
必须按照国家和当地电气规范将变送器外壳接地。最有效的变送器外壳接地方法是通过最小阻抗直接
连接到地面 (< 1 欧姆)。把变送器外壳接地的方法包括:
内部接地连接件:内部接地连接螺钉在电子装置外壳的端子侧中。该螺钉标记有接地符号 (),
是所有罗斯蒙特 3051S ERS 变送器上的标准部件。
外部接地连接件:外部接地连接件在 SuperModule
2.6 罗斯蒙特阀组
罗斯蒙特 305 一体式阀组可直接组装到罗斯蒙特 3051S ERS 变送器,不再需要使用法兰。罗斯蒙特
305 有两种设计:共平面 (底部过程连接件)和传统 (侧装过程连接件)。
图 2-15. 罗斯蒙特 305 一体式阀组
参考手册
00809-0106-4804, DA 版
™
外壳外部。此连接件标记有接地符号 ()。
罗斯蒙特 304 传统阀组可直接组装到仪表法兰以便于维护和改装。罗斯蒙特 304 有两种基本型式:传
统(法兰 ⫻ 法兰和法兰 ⫻ 管道)和对夹式。
图 2-16. 罗斯蒙特 304 传统式阀组
罗斯蒙特 306 阀组可直接组装到直连式变送器,并可采用外螺纹或内螺纹 1/2 英寸 NPT 过程连接件。
22
安装

参考手册
00809-0106-4804, DA 版
图 2-17. 罗斯蒙特 306 直连式阀组
2.6.1 罗斯蒙特 305 阀组的安装步骤
把罗斯蒙特 305 一体式阀组安装到罗斯蒙特 3051S ERS 变送器:
1. 检查 PTFE 传感器模块 O 型圈。如果 O 型圈未损坏,建议可以重用。如果 O 型圈损坏(例如如果有
裂纹或切口),应把其更换为新 O 型圈。
安装
2018 年 10 月
注
如果更换 O 型圈,在拆卸损坏的 O 型圈时,注意不要划伤或损伤 O 型圈的凹槽或隔膜的表面。
2. 在传感器模块过程连接件上安装一体式阀组。使用四个阀组螺栓进行定位。用手拧紧螺栓,然后按
交叉模式逐渐把螺栓拧紧到最终扭矩值。完整的螺栓安装说明和扭矩值请参阅第 11 页上的 “ 法兰
螺栓 ”。在完全拧紧时,螺栓应穿入 SuperModule 外壳的顶端。
3. 如果更换了 PTFE 传感器模块 O 型圈,那么在安装后应重新拧紧法兰螺栓,以补偿 O 型圈的变形。
4. 根据实际情况,使用随罗斯蒙特 3051S ERS 变送器提供的 1.75 英寸法兰螺栓把法兰接头安装到阀
组的过程端
2.6.2 罗斯蒙特 304 阀组的安装步骤
把罗斯蒙特 304 传统阀组安装到罗斯蒙特 3051S ERS 变送器:
1. 对准罗斯蒙特 304 阀组与传感器法兰。使用四个阀组螺栓进行定位。
2. 用手拧紧螺栓,然后按交叉模式逐渐把螺栓拧紧到最终扭矩值。完整的螺栓安装说明和扭矩值请参
阅第 11 页上的 “ 法兰螺栓 ”。在完全拧紧时,螺栓应穿入传感器模块组件的螺栓孔顶端,但不应与
变送器外壳接触。
3. 根据实际情况,使用随罗斯蒙特 3051S ERS 变送器提供的 1.75 英寸法兰螺栓把法兰接头安装到阀
组的过程端。
安装
23

安装
D
B
C
A
2018 年 10 月
2.6.3 罗斯蒙特 306 阀组的安装步骤
把罗斯蒙特 306 直连式阀组安装到罗斯蒙特 3051S ERS 变送器:
1. 把罗斯蒙特 3051S ERS 变送器放入夹具中。
2. 在阀组的螺纹仪表端涂适当的螺纹胶或缠螺纹胶带。
3. 在开始组装前,应计数阀组上的螺纹总数。
4. 首先用手把阀组拧入变送器的过程连接件。确保螺纹胶带未剥落。
5. 用扳手把阀组拧紧到过程连接件中。最小扭矩值是 425 英寸 - 磅。
6. 数一下仍露出的螺纹数目。至少应有三圈螺纹啮合。
7. 从螺纹总数减去露出的螺纹数目,以计算啮合的螺纹圈数。继续拧紧,直到至少有三圈螺纹啮合。
8. 对于截断泄放阀组,应检查泄放孔螺钉是否已安装和拧紧。对于两阀阀组,应检查通气孔塞是否已
安装并拧紧。
9. 按照变送器的最高压力范围对组件进行泄漏检查。
2.6.4 阀组的阀门组态
参考手册
00809-0106-4804, DA 版
截断和泄放阀组
罗斯蒙特 306 阀组可提供截断和泄放组态,以用于直连式表压和绝压变送器。单断流阀提供仪器隔
离,而螺塞提供排液/排气功能。
A. 变送器
B. 泄放孔螺钉
C. 过程
D. 隔离
24
安装

参考手册
A
B
D
E
C
A
B
D
C
00809-0106-4804, DA 版
双阀门阀组
罗斯蒙特 304、 305 和 306 阀组提供双阀组态,用于表压和绝压变送器。断流阀提供仪器隔离,而排
液/排气阀可用于排液、排气或标定。
A. 变送器
B. 测试/排气
C. 过程
D. 隔离
E. 测试 ( 塞住 )
安装
2018 年 10 月
罗斯蒙特 304 双阀组态 罗斯蒙特 305 和 305 阀门组态
安装
25

安装
2018 年 10 月
参考手册
00809-0106-4804, DA 版
26
安装

参考手册
警告
00809-0106-4804, DA 版
第 3 节组态
概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 27 页
安全信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 27 页
接线图 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 28 页
基本设置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 28 页
附加组态 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 32 页
HART 菜单树 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 41 页
3.1 概述
本节包含在安装前应在工作台上执行的调试工作和任务。
提供对手操器和 AMS 设备管理器 10.5 版执行组态功能的说明。为了方便起见,在相应的标题下,每
个软件功能的手操器快捷键序列都带有 “ 快捷键 ” 标签。
组态
2018 年 10 月
软件功能示例
快捷键
3.2 安全信息
执行操作时,为确保人身安全,请特别注意本节中的步骤和说明。可能引起潜在安全问题的信息用警
告符号 () 表示。执行带有该符号的操作前,请参阅以下安全信息。
不遵守这些安装指导可能导致死亡或严重受伤。
确保仅由具备资质的人员进行安装
爆炸可能会导致死亡或严重伤害。
当电路带电时,请不要在易爆环境中拆除变送器护盖。
在易爆环境中连接现场手持通讯器之前,应确保回路中的仪器是按照本质安全或非易燃现场接线
惯例安装的。
为满足防火/防爆要求,变送器的两个盖子都必须完全盖上。
应验证变送器的工作环境是否与相应的危险场所认证一致。
1, 2, 3 等
组态
27

组态
警告
2018 年 10 月
参考手册
00809-0106-4804, DA 版
触电可能导致死亡或严重受伤。
如果 Rosemount
则变送器引线和端子上可能存在高压。
在与导线和端子接触时,应极其小心。
过程泄漏可能导致死亡或严重受伤。
在加压前,应安装并拧好全部四个法兰螺栓。
当变送器处于工作状态时,不得试图松开或拆卸法兰螺栓。
若把未经 Emerson
来危险。
只能使用由艾默生提供或销售的螺栓作为配件。
若阀组与传统法兰的组装不当,则可能损坏设备。
为了安全地把阀组与变送器法兰组装到一起,螺栓必须挤入法兰腹板的背面(即,螺栓孔),但不得
与传感器模块接触。
静电可能损坏敏感部件。
应注意对静电敏感的部件的安全拿放注意事项。
™
3051S 电子远程传感器 (ERS)™ 系统安装在高电压环境中并出现故障或安装错误,
™
认可的更换设备或备件用作配件,则可能降低变送器的保压能力,并给仪表带
3.2.1 把回路设置为手动模式
每当发送或请求可能扰乱回路或改变变送器输出的数据时,应把过程应用回路设置为手动模式。现场
手持通讯器、AMS 设备管理器会在必要时提示您将回路设置为手动模式。确认此提示并不会将回路设
置为手动模式。提示仅是一种提醒;把回路设置为手动模式是一个单独的操作。
3.3 接线图
使用图 2-9、图 2-10 或 图 2-11 中所示的接线组态连接手操器或 AMS 设备管理器。手操器或 AMS 设备
管理器可跨接负载电阻或在信号回路中的任何端接点连接到罗斯蒙特 3051S ERS 主用变送器接线端子
上的 “PWR/COMM”。
手操器或 AMS 设备管理器将搜索与 HART
设备管理器未能连接,则会提示未找到设备。若发生这种情况,请参阅第 5 节:故障排除。
3.4 基本设置
建议验证并组态下列项以确保 ERS 系统发挥正确的功能。
®
兼容的设备,并在建立连接时给出提示。若手操器或 AMS
28
组态

参考手册
00809-0106-4804, DA 版
3.4.1 设备位号
组态
2018 年 10 月
快捷键
2, 1, 1, 1
Tag (位号)
8 位自由格式文本字段,可用于唯一识别设备。
Long tag (长位号)
32 位自由格式文本字段,可用于唯一识别设备。只有 HART 第 6 版或更高版本才支持长位号。
Descriptor (描述符)
16 位自由格式文本字段,可用于更详细地描述设备或应用。
Message (信息)
32 位自由格式文本字段,可用于保存关于设备或应用的信息或内部通知。
Date (日期)
规定格式的字段 (mm/dd/yyyy),可用于输入和存储日期 (例如,安装和上次标定之日)。
3.4.2 Units of measure (测量单位)
快捷键
2, 1, 1, 2, 1
差压、 PHI 压力和 PLO 压力测量可独立地组态以使用表 3-1 中显示的任何单位。
和 PLO 模块温度的单位可独立组态为华氏度或摄氏度。
P
HI
表 3-1. 压力测量单位
68 °F 时的 inH
0 °C 时的 inHg
68 °F 时的 ftH
68 °F 时的 mmH
0 °C 时的 mmHg
Psi kPa
O
2
O
2
O
2
3.4.3 Damping (阻尼)
快捷键
阻尼软件功能在处理过程中引入延迟,这会增加测量的响应时间;它会平滑由快速输入变化导致的输
出读数变动。根据所需的响应时间、信号稳定性和应用的其它要求确定适当的阻尼设置。
差压、 P
压力和 PLO 压力测量可独立地组态阻尼。阻尼可设置为 0 到 60 秒的任何值。
HI
2, 1, 1, 2, 2
bar Torr
mbar Atm
g/cm
kg/cm
Pa
2
2
MPa
4°C 时的 inH2O
4°C 时的 mmH
60°F 时的 H
O
2
O
2
组态
29
组态
2018 年 10 月
3.4.4 Variable mapping (变量映射)
参考手册
00809-0106-4804, DA 版
快捷键
2, 1, 1, 3
选择要分配给每个 HART 变量的 ERS 系统参数。
一级变量
分配给 HART 一级变量的参数可以控制 4—20 mA 模拟输出。下列 ERS 系统参数可以分配给一级变量:
差压
P
压力
HI
P
压力
LO
换算变量
2 级、 3 级和 4 级变量
2 级、 3 级和 4 级变量可通过 HART 主机以数字方式访问。 HART- 模拟转换器,例如 Rosemount 333
Tri-Loop
THUM
差压
P
P
P
P
换算变量
™
,也可用于将每个变量转换为 4—20 mA 模拟输出信号。这些变量还可使用艾默生无线
™
适配器以无线方式访问。下列 ERS 系统参数可以分配给 2 级、 3 级和 4 级变量:
压力
HI
压力
LO
模块温度
HI
模块温度
LO
3.4.5 模拟输出
快捷键
组态量程的上下限值,这些值对应于 4 mA 和 20 mA 模拟输出量程点。 4 mA 点代表 0% 的量程读数,
20 mA 点代表 100% 的量程读数。
模拟输出量程点还可使用位于罗斯蒙特 3051S ERS 主用变送器上的零点和量程调整按钮 (请参阅
图 3-1)和压力源设置。
1. 使用精度为所需标定精度的三至十倍的压力源,并对 P
2. 按下并按住零点调整按钮至少两秒,但不能长于十秒。
3. 对 P
4. 按下并按住量程调整按钮至少两秒,但不能长于 10 秒。
变送器施加与范围上限值相当的压力。
HI
2, 1, 1, 4
变送器施加与范围下限值相当的压力。
HI
30
组态

参考手册
B
A
00809-0106-4804, DA 版
图 3-1. 零点和量程按钮
A. 零点
B. 量程
3.4.6 报警和饱和水平
组态
2018 年 10 月
快捷键
2, 1, 1, 5
罗斯蒙特 3051S ERS 变送器自动并连续执行自我诊断例程。如果自我诊断例程检测到故障, ERS 系统
会根据故障模式报警开关的位置把输出驱动到组态的报警值(请参阅第 40 页上的“组态过程警报”)。
如果施加的压力超出 4-20 mA 范围值, ERS 系统也会把输出驱动为组态的饱和值。
罗斯蒙特 3051S ERS 系统有三个选项可用于组态故障模式报警和饱和水平:
注
如果对任一传感器施加的压力超出传感器下限值 (LSL) 或传感器上限值 (USL),则 ERS 系统会将输出驱
动到报警水平 (高位或低位)。
表 3-2. 报警和饱和值
罗斯蒙特 (标准)
开关位置 饱和水平 报警水平
低位
高位
3.9 mA 3.75 mA
20.8 mA 21.75 mA
符合 NAMUR
开关位置 饱和水平 报警水平
低位
高位
3.8 mA 3.6 mA
20.5 mA 22.5 mA
组态
自定义
开关位置 饱和水平 报警水平
低位
高位
3.7 – 3.9 mA 3.54 – 3.8 mA
20.1 – 21.5 mA 20.2 – 23.0 mA
使用自定义报警和饱和值时的其他考虑事项:
低位报警必须低于低位饱和
高位报警必须高于高位饱和
报警和饱和水平必须至少间隔 0.1 mA。
31

组态
2018 年 10 月
3.5 附加组态
下列项属于可选内容,可根据需要组态。请参阅第 41 页上的图 3-7 以了解完整手操器菜单树。
3.5.1 就地显示
参考手册
00809-0106-4804, DA 版
快捷键
就地显示作为罗斯蒙特 3051S ERS 主用变送器的可订购选件提供。该显示屏可使用 0—100% 带刻度条
形图的格式显示从表 3-3 中选择的测量,以及任何诊断或错误信息。必须选择表 3-3 中的至少一个参
数。如果选择了多项,显示屏将滚动显示所选的参数,每项显示三秒。
表 3-3. 可用于就地显示的参数
差压 P
P
压力 PLO 模块温度 不适用
HI
P
LO
3.5.2 阵发模式
快捷键
在组态为阵发模式时, ERS 通过消除控制系统从 ERS 系统请求信息所需的时间而实现从 ERS 系统到控
制系统的更快数字通讯。
在阵发模式中, ERS 系统将继续输出 4—20 mA 模拟信号。由于 HART 协议具有数字和模拟数据同时传
输的特点,在控制系统接收数字信息的同时,模拟值可以驱动回路中的其它设备。阵发模式仅适用于
传送动态数据 (工程单位的过程变量,以量程百分比表示的一级变量以及模拟输出读数),不影响其
它变送器数据的访问方式。
通过 HART 通讯的正常轮询/响应方式可以获取非阵发信息。当 ERS 系统处于阵发模式时,现场通讯器、
AMS 设备管理器或控制系统可以请求通过正常方式可获得的任何信息。
2, 1, 3
模块温度 输出 (% 范围)
HI
压力 换算变量 不适用
2, 2, 5, 3
32
阵发模式组态
组态 ERS 系统以使其在阵发模式中通讯:
1. 将 Burst Mode (阵发模式)参数设置为 “on” (开)。
2. 从下面的表 3-4 中选择所需的阵发选项。此参数决定通过阵发模式交流的信息。
表 3-4. 阵发命令选项
HART 命令 阵发选项 说明
1
2
3
9
33
一级变量 一级变量
范围百分比/电流 范围百分比和毫安输出
动态变量/电流 所有过程变量和毫安输出
设备变量加状态 阵发变量和状态信息
设备变量 阵发变量
组态

参考手册
A
B
C
00809-0106-4804, DA 版
注
如果使用配有罗斯蒙特 333 HART Tri-Loop 的 ERS 系统,阵发选项应设置为 “Dyn vars/current” (动态
变量/电流)。
阵发变量时隙定义
如果选择 Device vars w/status (带状态的设备变量)或 Device Variables (设备变量)作为阵发选
项,您将需要组态在阵发模式中交流哪些变量。这可通过向 Burst Slot (阵发时隙)分配变量来实现。
ERS 系统有四个 Burst Slot (阵发时隙)可用于阵发通讯。
3.5.3 多点通讯
组态
2018 年 10 月
快捷键
2, 2, 5, 2
当接入多点网络中后,HART 协议允许多个变送器在单条传输线路上进行数字通讯。如果在多点网络中
使用 ERS 系统,与该网络的连接通过主用传感器建立,如图 3-2 中所示。
注
图 3-2 示出了一个典型的多点网络。此图不是安装图。
主机和变送器之间的通讯以数字方式进行,每个变送器上的模拟输出都被停用。
注
处于多点模式并且 “ 回路电流模式 ” 被禁用的变送器的模拟输出固定为 4 mA。
图 3-2. 典型多点网络
组态
A. HART 调制解调器
B. 电源
C. ERS 系统
33

组态
2018 年 10 月
启用多点组态
将 ERS 系统组态为多点网络的一部分:
1. 为 ERS 系统分配唯一地址。对于 HART 第 5 版系统,有效的地址范围为 1—15。对于 HART 第 6 版或
更高版本的系统,有效的地址范围为 1-63。所有罗斯蒙特变送器出厂时都设置为默认地址零 (0)。
2. 禁用 “ 回路电流模式 ”。这将会导致 ERS 系统的模拟输出固定为 4 mA。
注
当组态 ERS 系统进行多点通讯时,将不再通过模拟输出指示故障或报警条件。多点变送器中的故障信
号通过 HART 消息以数字方式传送。
禁用多点组态
使用出厂默认的点到点通讯组态 ERS 系统:
1. 为 ERS 系统分配地址零 (0)。
2. 启用 “ 回路电流模式 ”。
3.5.4 换算变量
参考手册
00809-0106-4804, DA 版
快捷键
换算变量可用于将 ERS 系统计算出的差压 (DP) 转换为备选测量值,例如液位、质量或容积。例如,测
量 0 — 500 mbar 差压的 ERS 系统可组态为输出 0—5 米的液位测量值。换算变量计算值可显示在 LCD 显
示屏上,也可分配到 4—20 mA 输出。
可以使用任意位置的 2 到 20 个点来定义 DP 测量值与换算变量计算值之间的数学关系。
2, 2, 3
组态换算变量以计算液位
快捷键
由于液位可通过 DP 按线性关系推出,因此只需要两个换算变量点即可组态 ERS 以计算液位测量值。
下面突出显示了为液位应用组态换算变量所需的步骤:
1. 输入文本字符串 (最多五个字符:A—Z、 -、 %、 /、 *、和 “ 空格 ”)以定义换算输出的测量单位。
示例包括 METER (米)、 FEET (英尺)或 INCH (英寸)。
2. 输入 ERS 系统将可测量的最小 DP (使用工程单位)。此值通常为零 (0)。
3. 输入与第 2 步中的最小 DP 对应的换算变量值 (单位为第 1 步中定义的换算单位)。
4. 输入 ERS 系统将可测量的最大 DP。
5. 输入与第 4 步中的 DP 对应的换算变量值。
6. 为了使 ERS 系统的 4—20 mA 信号输出换算变量测量,将换算变量映射到 HART 一级变量,并组态范
围上限和下限值。
2, 2, 3, 5, 1
34
组态

参考手册
比重
= 0.94
4.5 英尺
1.5 英尺
00809-0106-4804, DA 版
图 3-3. 换算变量 - 液位
组态
2018 年 10 月
表 3-5. 换算变量组态选项
变量 单位
换算单位 米 (英尺)
DP1(最小 DP)
换算1(最小 DP 时的液位)
DP2(最大液位时的 DP)
换算2(最大液位)
一级变量 换算变量
LRV (4 mA) 0.46 m (1.5 ft.)
URV (20 mA) 1.83 m (6.0 ft.)
0 mmH2O (0 inH2O)
0.46 m (1.5 ft.)
1,289 mmH2O (50.76 inH2O)
1.83 m (6.0 ft.)
组态换算变量以计算质量或容积
快捷键
要从 DP 测量推出质量或容积计算,可能需要两个以上换算变量点,这取决于储罐的形状和几何结构。
ERS 支持使用三种不同的方法为质量或容积应用组态换算变量:
直接:使用任意位置的 2 至 20 个点手动组态换算变量。
储罐公式:通过输入储罐形状、储罐几何结构和过程介质比重,将可自动组态换算变量。
罐容表:通过输入传统的 “ 液位与容积 ” 罐容表,将可自动组态换算变量。
2, 2, 3, 5, 1
组态
35

组态
50 inH2O = 300 GALNS
20 inH
2
O = 50 GALNS
15 inH
2
O= 30 GALNS
0 inH
2
O = 15 GALNS
2018 年 10 月
参考手册
00809-0106-4804, DA 版
直接法
下面突出显示了使用直接法为质量和容积应用组态换算变量所需的步骤:
1. 输入文本字符串 (最多五个字符:A—Z、 -、 %、 /、 *、和 “ 空格 ”)以定义换算输出的测量单位。
示例包括 GALNS (加仑)、 POUND (磅)或 LITER (升)。
2. 定义将要组态的换算变量点数量 (有效范围 = 2 — 20)。
3. 输入第一个 DP 值 (使用工程单位)和相应的换算变量值。
4. 对第 2 步中所定义数量的换算变量点重复第 3 步。
注
为每个连续 DP 和换算变量对输入的值必须不小于上一对的值。
5. 如果过程介质低于 P
压力接头,ERS 系统将无法计算质量或容积。如果因考虑 PHI 传感器的安装位
HI
置而需要调整换算变量组态,您可以输入偏移:
No offset (无偏移):第 3 步和第 4 步中定义的换算变量组态已考虑 P
Offset A (偏移 A):通过提供 P
压力接头 (相对于容器底部)的高度和过程介质的比重来调整换
HI
算变量组态。
Offset B (偏移 B):通过定义位于 P
压力接头下方的质量和容积 (这将决定当 ERS 系统读数为
HI
“0 DP” 时的换算输出量)来调整换算变量组态。
6. 如果在第 5 步中使用偏移,将自动创建考虑了 P
变送器安装位置的新换算变量组态。
HI
图 3-4. 换算变量 - 直接法
变送器的安装位置。
HI
36
组态

参考手册
00809-0106-4804, DA 版
表 3-6. 换算变量组态选项
变量 单位
组态
2018 年 10 月
换算单位
换算点数量
DP1
换算
1
DP2
换算
2
DP
3
换算3
DP
4
换算4
偏移 无偏移
一级变量 换算变量
LRV (4 mA) 57 L (15 gal)
URV (20 mA) 189 L (50 gal)
L (gal)
4
0 mmH2O (0 inH2O)
57 L (15 gal)
381 mmH2O (15 inH2O)
114 L (30 gal)
508 mmH2O (20 inH2O)
189 L (50 gal)
1,270 mmH2O (50 inH2O)
1,136 L (300 gal)
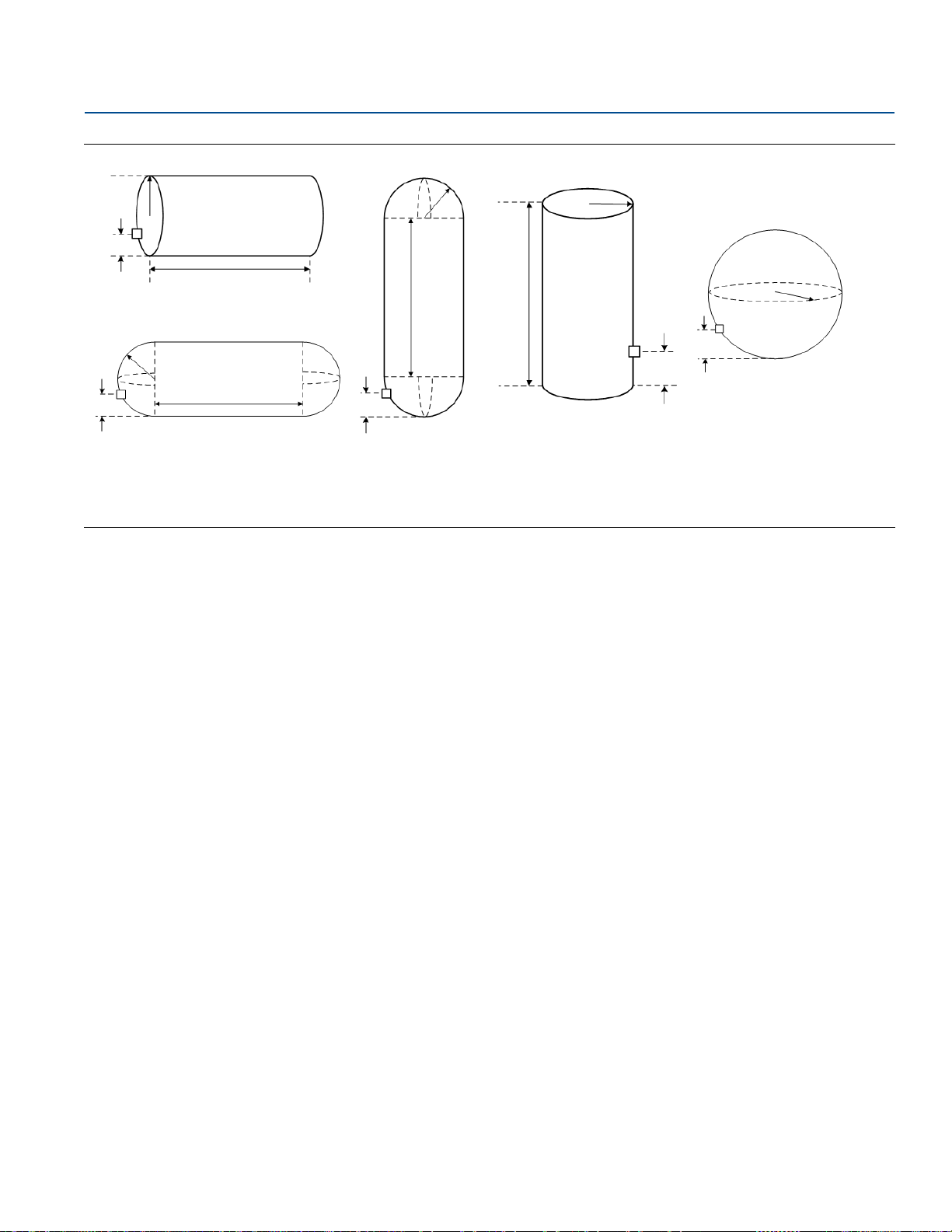
储罐公式法
如果 ERS 系统安装在图 3-5 中所示的储罐类型之一上,则可使用储罐公式法组态换算变量。使用储罐
公式法的步骤如下:
1. 输入文本字符串 (最多五个字符:A—Z、 -、 %、 /、 *、和 “ 空格 ”)以定义换算输出的测量单位。
示例包括 GALNS (加仑)、 POUND (磅)或 LITER (升)。
2. 选择 ERS 应用的储罐类型 (参考图 3-5)。
3. 定义关于储罐的以下信息:
储罐尺寸所用的测量单位
储罐长 (L) (不适用于球形储罐)(参考图 3-5)
储罐半径 (R) (参考图 3-5)
P
压力接头的位置 (T) (参考图 3-5)
HI
容器的最大容量 (单位为第 1 步中定义的测量单位)
过程流体的比重
4. 换算变量组态将根据第 3 步中的信息自动生成。验证换算变量组态,必要时修改。
5. 为了使 ERS 系统的 4—20 mA 信号输出换算变量测量,将换算变量映射到 HART 一级变量,并组态范
围上限和下限值。
组态
37
组态
A
B
C
D
E
R
R
R
R
R
T
T
L
L
T
T
L
L
T
2018 年 10 月
图 3-5. “ 储罐公式 ” 组态法支持的储罐形状
A. 横筒形罐
B. 横锥形罐
C. 竖锥形罐
D. 竖筒形罐
E. 球形罐
参考手册
00809-0106-4804, DA 版
罐容表法
通过输入传统的 “ 液位与容积 ” 罐容表也可组态换算变量。使用罐容表法的步骤如下:
1. 选择输入液位数据时使用的测量单位。
2. 输入文本字符串 (最多五个字符:A—Z、 -、 %、 /、 *、和 “ 空格 ”)以定义容积数据的测量单位。
示例包括 GALNS (加仑)或 LITER (升)。
3. 定义过程流体的比重。
4. 定义将要输入的罐容表点的数量。
5. 输入第一个液位值 (使用工程单位)和相应的容积值。
6. 对第 4 步中所定义数量的罐容表点重复第 5 步。
7. 换算变量组态将根据提供的罐容表信息自动生成。验证换算变量组态,必要时修改。
8. 为了使 ERS 系统的 4—20 mA 信号输出换算变量测量,将换算变量映射到 HART 一级变量,并组态范
围上限和下限值。
38
组态
参考手册
PLO 传感器
序列号 11223344
DP = P
HI
- P
LO
P
HI
传感器
序列号 44332211
1
2
3
00809-0106-4804, DA 版
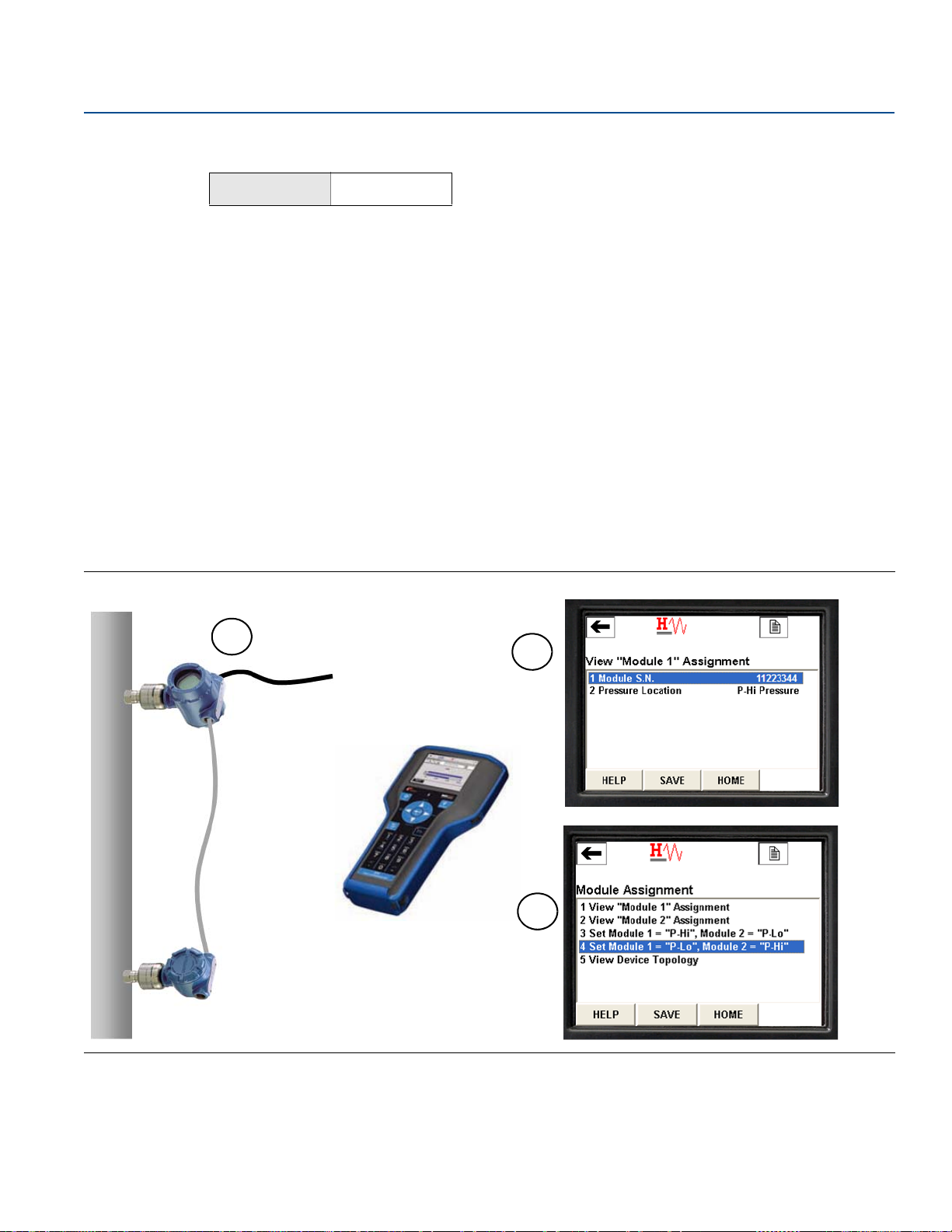
3.5.5 模块分配
组态
2018 年 10 月
快捷键
ERS 系统使用 PHI 变送器的压力测量值减去 PLO 变送器的压力测量值,计算出差压。
罗斯蒙特 3051S ERS 变送器出厂时已经过预组态,主用传感器(4—20 回路终端和可选 LCD 显示屏)指
定为 P
设备,备用传感器(接线盒壳体)指定为 PLO 设备。在主用变送器安装在 PLO 过程连接件(例
HI
如,储罐顶部)的安装中,这些指定可利用手操器以电子方式切换。
更改 PHI 和 PLO 模块分配
1. 查看每个罗斯蒙特 3051S ERS 变送器的颈标,记录变送器的序列号和压力位置 (PHI 与 PLO)。
2. 使用手操器查看 “Module 1” (模块 1)或 “Module 2” (模块 2)的序列号以及分配的压力位置。
3. 如果当前分配的 P
分配:
设置模块 1 = P
设置模块 1 = P
查看来自 ERS 系统的 DP 测量结果,验证计算为正量级。如果 DP 测量为负量级,则使用第 3 步中的其
他模块分配命令。
图 3-6. 更改 PHI 和 PLO 模块分配的方法示例
HI/PLO
,模块 2 = PLO
HI
,模块 2 = PHI
LO
2, 2, 6
方案未体验第 1 步中记录的实际安装,使用下面的任意命令更改 PHI/P
LO
组态
39

组态
2018 年 10 月
3.5.6 过程警报
参考手册
00809-0106-4804, DA 版
快捷键
2, 3
过程警报允许 ERS 系统组态为当参数(例如, DP 测量值)超过用户定义的工作窗时输出 HART 信息。
轮询时警报将传输到 HART 主机 (例如,手操器或 AMS 设备管理器),并显示在 ERS 系统的 LCD 显示
屏上。当值返回到范围之内时,警报会复位。
还可针对下列参数组态过程警报:
差压
P
压力
HI
P
压力
LO
P
模块温度
HI
P
模块温度
LO
组态过程警报
1. 选择将要为哪个参数组态过程警报。
2. 将 Alert Mode (警报模式)设置为 “enable” (启用)。
3. 定义低位警报值。如果该参数的测量值低于低位警报值,将会生成警报消息。
4. 定义高位警报值。如果该参数的测量值超出高位警报值,将会生成警报消息。
禁用过程警报
1. 选择将要为哪个参数禁用过程警报。
2. 将 Alert Mode (警报模式)设置为 “disabled” (禁用)。
40
组态

Home
1 Overview
2 Configure
3 Service Tools
Overview
1 Device Status
2 Communications
3 Device Information
4 Analog Output
5 Variables
6 Calibration
7 Find Device
Communications
1 Variable Mapping
2 Communications Setting
3 Configure Burst Mode
Variable Mapping
1 Primary Variable
2 2nd Variable
3 3rd Variable
4 4th Variable
Variable Mapping
1 Polling Address
2 Loop Current Mode
Configure Burst Mode
1 Burst Mode
2 Burst Option
3 Burst Slot 0
4 Burst Slot 1
5 Burst Slot 2
6 Burst Slot 3
Device Information
1 General
2 Model Numbers
3 HART Revision Numbers
4 P-Hi Module Information
5 P-Lo Module Information
6 Alarm and Security
7 View Device Topology
General
1 Tag
2 Long Tag
3 Model
4 Date
5 Descriptor
6 Message
7 ERS Serial Number
8 Electronics Serial Number
Model Numbers
1 Model Number 1
2 Model Number 2
3 Model Number 3
4 Model Number 4
HART Revision Numbers
1 HART Universal
2 Field Device
3 Software
4 Hardware
P-Hi Module Information
1 Sensor Module Information
2 Flange Information
3 Remote Seal Information
Sensor Module Information
1 Sensor Module Serial Number
2 Type
3 Configuration
4 Sensor Range
5 Upper Limit
6 Lower Limit
7 Isolator Material
8 Fill Fluid
Flange Information
1 Process Connection
2 Connection Material
3 O-Ring Material
4 Drain / Vent Material
Remote Seal Information
1 Number of Seals
2 Remote Seal Type
3 Diaphragm Material
4 Fill Fluid
P-Lo Module Information
1 Sensor Module Information
2 Flange Information
3 Remote Seal Information
Sensor Module Information
1 Sensor Module Serial Number
2 Type
3 Configuration
4 Sensor Range
5 Upper Limit
6 Lower Limit
7 Isolator Material
8 Fill Fluid
Flange Information
1 Process Connection
2 Connection Material
3 O-Ring Material
4 Drain / Vent Material
Remote Seal Information
1 Number of Seals
2 Remote Seal Type
3 Diaphragm Material
4 Fill Fluid
Alarm and Security
1 Alarm Direction
2 High Alarm
3 High Saturation
4 Low Saturation
5 Low Alarm
6 Write Protect
参考手册
00809-0106-4804, DA 版
3.6 HART 菜单树
图 3-7. 概述
组态
2018 年 10 月
组态
41

ѱ享ѱ享
1 ᾲ䘠
2 㓴ᘱ
3 㔤؞ᐕާ
Ᾰ䘦Ᾰ䘦
1 䇮༷⣦ᘱ
2 䙊䇟
3 䇮༷ؑ
4 ⁑ᤏ䗃ࠪ
5 䟿
6 ḷᇊ
7 ḕ䇮༷
䙐䇥䙐䇥
1 䟿᱐ሴ
2 䙊䇟䇮㖞
3 㓴ᘱ䱥⁑ᔿ
䠅᱖ሺ䠅᱖ሺ
1 а㓗䟿
2 Ҽ㓗䟿
3 й㓗䟿
4 ഋ㓗䟿
䠅᱖ሺ䠅᱖ሺ
1 䖞䈒ൠ൰
2 എ䐟⭥⍱⁑ᔿ
㓺ᘷ䱫⁗ᕅ㓺ᘷ䱫⁗ᕅ
1 䱥⁑ᔿ
2 䱥䘹亩
3 䱥ᰦ䳉 0
4 䱥ᰦ䳉 1
5 䱥ᰦ䳉 2
6 䱥ᰦ䳉 3
䇴༽ؗᚥ䇴༽ؗᚥ
1 ᙫࡉ
2 ර
3 HAR
T ⡸ᵜ
4 P-Hi ⁑ඇؑ
5 P-Lo ⁑ඇؑ
6 ᣕ䆖઼ᆹޘ
7 ḕⴻ䇮༷ᤃᢁ
ᑮ㿺ᑮ㿺
1 ս
2 䮯ս
3 ර
4 ᰕᵏ
5 ᧿䘠ㅖ
6 ؑ
7 ERS ᒿࡇ
8 ⭥ᆀ䜘Ԧᒿࡇ
ශශ
1 ර 1
2 ර 2
3 ර 3
4 ර 4
HART ⡾ᵢ⡾ᵢ
1 HART 䙊⭘
2 ⧠൪䇮༷
3 䖟Ԧ
4 ⺜Ԧ
P-Hi ⁗ඍؗᚥ⁗ඍؗᚥ
1 Րᝏಘ⁑ඇؑ
2 ⌅ޠؑ
3 䘌〻ᇶሱؑ
Ֆಞ⁗ඍؗᚥՖಞ⁗ඍؗᚥ
1 Րᝏಘ⁑ඇᒿࡇ
2 ㊫ර
3 㓴ᘱ
4 Րᝏಘ㤳ത
5 к䲀٬
6 л䲀٬
7 䳄ಘᶀᯉ
8 ປݵ⏢
⌋ަؗᚥ⌋ަؗᚥ
1 䗷〻䘎᧕
2 䘎᧕Ԧᶀ䍘
3 O ᖒസᶀᯉ
4 ᧂ᭮/ᧂ≄ᶀᯉ
䘒ぁᇼሷؗᚥ䘒ぁᇼሷؗᚥ
1 ᇶሱԦᮠ䟿
2 䘌〻ᇶሱԦ㊫ර
3 㟌⡷ᶀᯉ
4 ປݵ⏢
P-Lo ⁗ඍؗᚥ⁗ඍؗᚥ
1 Րᝏಘ⁑ඇؑ
2 ⌅ޠؑ
3 䘌〻ᇶሱؑ
Ֆಞ⁗ඍؗᚥՖಞ⁗ඍؗᚥ
1 Րᝏಘ⁑ඇᒿࡇ
2 ㊫ර
3 㓴ᘱ
4 Րᝏಘ㤳ത
5 к䲀٬
6 л䲀٬
7 䳄ಘᶀᯉ
8 ປݵ⏢
⌋ަؗᚥ⌋ަؗᚥ
1 䗷〻䘎᧕
2 䘎᧕Ԧᶀ䍘
3 O ᖒസᶀᯉ
4 ᧂ᭮/ᧂ≄ᶀᯉ
䘒ぁᇼሷؗᚥ䘒ぁᇼሷؗᚥ
1 ᇶሱԦᮠ䟿
2 䘌〻ᇶሱԦ㊫ර
3 㟌⡷ᶀᯉ
4 ປݵ⏢
ᣛ䆜ૂᆿޞᣛ䆜ૂᆿޞ
1 ᣕ䆖ᯩ
2 儈սᣕ䆖
3 儈ս価઼
4 վս価઼
5 վսᣕ䆖
6 ߉؍ᣔ
组态
2018 年 10 月
参考手册
00809-0106-4804, DA 版
42
组态

Home
1 Overview
2 Configure
3 Service Tools
Guided Setup
1 Basic Setup
2 Zero Trim
3 Configure Display
4 Configure Burst Mode
5 Scaled Variable
6 Change Module Assignments
7 Configure Process Alerts
Basic Setup
1 Device Tagging
2 Units of Measure / Damping
3 Variable Mapping
4 Analog Output
5 Alarm / Saturation Levels
Configure
1 Guided Setup
2 Manual Setup
3 Alert Setup
Device Tagging
1 Tag
2 Long Tag
3 Descriptor
4 Message
5 Date
Units of Measure / Damping
1 Units of Measure
2 Damping
Units of Measure
1 P-Lo Pressure Unit
2 P-Lo Temperature Unit
3 System DP Unit
4 P-Hi Temperature Unit
5 P-Hi Pressure Unit
Damping
1 P-Lo Pressure Damping
2 System DP Damping
3 P-Hi Pressure Damping
Variable Mapping
1 Primary Variable
2 2nd Variable
3 3rd Variable
4 4th Variable
Analog Output
1 Primary Variable
2 Upper Range Value
3 Lower Range Value
Zero Trim
1 P-Hi Sensor Zero Trim
2 P-Lo Sensor Zero Trim
3 System DP Zero Trim
Configure Burst Mode
1 Burst Mode
2 Burst Option
Scaled Variable
1 Linear Scaled Variable
2 Non-Linear Scaled Variable
Change Module Assignments
1 View "Module 1" Assignment
2 View "Module 2" Assignment
3 Set Modules as P-Hi - P-Lo
4 Set Modules as P-Lo - P-Hi
5 View Device Topology
Configure Process Alerts
1 Pressure Alerts
2 Temperature Alerts
Pressure Alerts
1 System DP
2 P-Hi Pressure
3 P-Lo Pressure
4 View Device Topology
Temperature Alerts
1 System DP
2 P-Hi Module Temperature
3 P-Lo Module Temperature
4 View Device Topology
Manual Setup
1 Process Variables
2 Analog Output
3 Scaled Variable
4 Configuration Display
5 HART
6 Module Assignment
7 Device Information
Process Variables
1 System DP
2 P-Hi Module
3 P-Lo Module
4 View Device Topology
System DP
1 System DP Value
2 System DP Unit
3 System DP Damping
4 Upper Limit
5 Lower Limit
6 Minimum Span
P-Hi Module
1 P-Hi Pressure Value
2 P-Hi Pressure Unit
3 P-Hi Pressure Damping
4 P-Hi Sensor Limits
5 P-Hi Module Temperature
6 P-Hi Module Temp. Unit
P-Hi Sensor Limits
1 Upper Limit
2 Lower Limit
3 Minimum Span
P-Lo Module
1 P-Lo Pressure Value
2 P-Lo Pressure Unit
3 P-Lo Pressure Damping
4 P-Lo Sensor Limits
5 P-Lo Module Temperature
6 P-Lo Module Temp. Unit
P-Lo Sensor Limits
1 Upper Limit
2 Lower Limit
3 Minimum Span
Analog Output
1 Analog Output Information
2 Configuration
3 Sensor Limits
4 Alarm / Saturation Levels
Analog Output Information
1 Analog Output Value
2 Percent of Range
Configuration
1 Primary Variable
2 Upper Range Value
3 Lower Range Value
Sensor Limits
1 Upper
2 Lower
3 Minimum Span
Alarm / Saturation Levels
1 Alarm Direction
2 High Alarm
3 High Saturation
4 Low Saturation
5 Low Alarm
6 Configure
Scaled Variable
1 Scaled Variable Value
2 Damping
3 Upper Limit
4 Lower Limit
5 Configure
6 View Configuration
7 Tank Dimensions
8 View Strapping Table
Configure
1 Linear Scaled Variable
2 Non-Linear Scaled Variable
Tank Dimensions
1 Tank Type
2 Tank Length
3 Tank Radius
4 P-Hi Tap Location
5 Specific Gravity
View Strapping Table
1 Update Table
2 View Table
3 Level Unit
4 Scaled Variable Unit
5 Specific Gravity
6 Offset
HART
1 Variable Mapping
2 Communication Settings
3 Configure Burst Mode
Variable Mapping
1 Primary Variable
2 2nd Variable
3 3rd Variable
4 4th Variable
Communication Settings
1 Polling Address
2 Loop Current Mode
Configure Burst Mode
1 Burst Mode
2 Burst Option
3 Burst Slot 0
4 Burst Slot 1
5 Burst Slot 2
6 Burst Slot 3
Module Assignment
1 View “Module 1” Assignment
2 View “Module 2” Assignment
3 Set Modules as P-Hi – P-Lo
4 Set Modules as P-Lo – P-Hi
5 View Device Topology
Device Information
Continued on next page...
Alert Setup
Continued on next page...
参考手册
00809-0106-4804, DA 版
图 3-8. 组态
组态
组态
2018 年 10 月
43

ѱ享ѱ享
1 ᾲ䘠
2 㓴ᘱ
3 㔤؞ᐕާ
䇴㖤ሲ䇴㖤ሲ
1 สᵜ䇮㖞
2 䴦⛩䈳ṑ
3 㓴ᘱᱮ⽪ቿ
4 㓴ᘱ䱥⁑ᔿ
5 ᦒ㇇䟿
6 ᴤ᭩⁑ඇ࠶䝽
7 㓴ᘱ䗷〻䆖ᣕ
ะᵢ䇴㖤ะᵢ䇴㖤
1 䇮༷ս
2 ⍻䟿অս/䱫ቬ
3 䟿᱐ሴ
4 ⁑ᤏ䗃ࠪ
5 ᣕ䆖/価઼≤ᒣ
㓺ᘷ㓺ᘷ
1 䇮㖞ሬ
2 ࣘ䇮㖞
3 䆖ᣕ䇮㖞
䇴༽փ䇴༽փ
1 ս
2 䮯ս
3 ᧿䘠ㅖ
4 ؑ
5 ᰕᵏ
⎁䠅ঋփ䱱ቲ⎁䠅ঋփ䱱ቲ
1 ⍻䟿অս
2 䱫ቬ
⎁䠅ঋփ⎁䠅ঋփ
1 P-Lo ࣋অս
2 P-Lo ᓖঅս
3 ㌫㔏ᐞঅս
4 P-Hi ᓖঅս
5 P-Hi ࣋অս
䱱ቲ䱱ቲ
1 P-Lo ࣋䱫ቬ
2 ㌫㔏ᐞ䱫ቬ
3 P-Hi ࣋䱫ቬ
䠅᱖ሺ䠅᱖ሺ
1 а㓗䟿
2 Ҽ㓗䟿
3 й㓗䟿
4 ഋ㓗䟿
⁗ᤕ䗉࠰⁗ᤕ䗉࠰
1 а㓗䟿
2 㤳തк䲀٬
3 㤳തл䲀٬
䴬⛯䈹ṗ䴬⛯䈹ṗ
1 P-Hi Րᝏಘ䴦⛩䈳ṑ
2 P-Lo Րᝏಘ䴦⛩䈳ṑ
3 ㌫㔏ᐞ䴦⛩䈳ṑ
㓺ᘷ䱫⁗ᕅ㓺ᘷ䱫⁗ᕅ
1 䱥⁑ᔿ
2 䱥䘹亩
ᦘ㇍䠅ᦘ㇍䠅
1 㓯ᙗᦒ㇇䟿
2 䶎㓯ᙗᦒ㇇䟿
ᴪ᭯⁗ඍ࠼䞃ᴪ᭯⁗ඍ࠼䞃
1 ḕⴻ“⁑ඇ 1”࠶䝽
2 ḕⴻ“⁑ඇ 2”࠶䝽
3 ሶ⁑ඇ䇮㖞Ѫ P-Hi - P-Lo
4 ሶ⁑ඇ䇮㖞Ѫ P-Lo - P-Hi
5 ḕⴻ䇮༷ᤃᢁ
㓺ᘷ䗽ぁ䆜ᣛ㓺ᘷ䗽ぁ䆜ᣛ
1 ࣋䆖ᣕ
2 ᓖ䆖ᣕ
ু࣑䆜ᣛু࣑䆜ᣛ
1 ㌫㔏ᐞ
2 P-Hi ࣋
3 P-Lo ࣋
4 ḕⴻ䇮༷ᤃᢁ
ᓜ䆜ᣛᓜ䆜ᣛ
1 ㌫㔏ᐞ
2 P-Hi ⁑ඇᓖ
3 P-Lo ⁑ඇᓖ
4 ḕⴻ䇮༷ᤃᢁ
ᢁࣞ䇴㖤ᢁࣞ䇴㖤
1 䗷〻䟿
2 ⁑ᤏ䗃ࠪ
3 ᦒ㇇䟿
4 㓴ᘱᱮ⽪
5 HAR
T
6 ⁑ඇ࠶䝽
7 䇮༷ؑ
䗽ぁ䠅䗽ぁ䠅
1 ㌫㔏ᐞ
2 P-Hi ⁑ඇ
3 P-Lo ᶐᵶ
4 ḕⴻ䇮༷ᤃᢁ
㌱㔕ᐤু㌱㔕ᐤু
1 ㌫㔏ᐞ٬
2 ㌫㔏ᐞঅս
3 ㌫㔏ᐞ䱫ቬ
4 к䲀٬
5 л䲀٬
6 ᴰሿ䟿〻
P-Hi ⁗ඍ⁗ඍ
1 P-Hi ࣋٬
2 P-Hi ࣋অս
3 P-Hi ࣋䱫ቬ
4 P-Hi Րᝏಘᶱ䲀
5 P-Hi ⁑ඇᓖ
6 P-Hi ⁑ඇᓖঅս
P-Hi Րᝏಘᶱ䲀Րᝏಘᶱ䲀
1 к䲀٬
2 л䲀٬
3 ᴰሿ䟿〻
P-Lo⁗ඍ⁗ඍ
1 P-Lo ࣋٬
2 P-Lo ࣋অս
3 P-Lo ࣋䱫ቬ
4 P-Lo Րᝏಘᶱ䲀
5 P-Lo ⁑ඇᓖ
6 P-Lo ⁑ඇᓖঅս
P-Lo Րᝏಘᶱ䲀Րᝏಘᶱ䲀
1 к䲀٬
2 л䲀٬
3 ᴰሿ䟿〻
⁗ᤕ䗉࠰⁗ᤕ䗉࠰
1 ⁑ᤏ䗃ࠪؑ
2 㓴ᘱ
3 Րᝏಘᶱ䲀
4 ᣕ䆖/価઼≤ᒣ
⁗ᤕ䗉࠰ؗᚥ⁗ᤕ䗉࠰ؗᚥ
1 ⁑ᤏ䗃ࠪ٬
2 㤳തⲮ࠶∄
㓺ᘷ㓺ᘷ
1 а㓗䟿
2 㤳തк䲀٬
3 㤳തл䲀٬
Ֆಞᶷ䲆Ֆಞᶷ䲆
1 к䲀
2 л䲀
3 ᴰሿ䟿〻
ᣛ䆜侧ૂ≪ᒩᣛ䆜侧ૂ≪ᒩ
1 ᣕ䆖ᯩ
2 儈սᣕ䆖
3 儈ս価઼
4 վս価઼
5 վսᣕ䆖
6 㓴ᘱ
ᦘ㇍䠅ᦘ㇍䠅
1 ᦒ㇇䟿
2 䱫ቬ
3 к䲀٬
4 л䲀٬
5 㓴ᘱ
6 ḕⴻ㓴ᘱ
7 ۘ㖀ቪረ
8 ḕⴻ㖀ᇩ㺘
㓺ᘷ㓺ᘷ
1 㓯ᙗᦒ㇇䟿
2 䶎㓯ᙗᦒ㇇䟿
۞㖆ተሮ۞㖆ተሮ
1 ۘ㖀㊫ර
2 ۘ㖀䮯ᓖ
3 ۘ㖀ᖴ
4 P-Hi ຎս㖞
5 ∄䟽
ḛⵁ㖆ᇯ㺞ḛⵁ㖆ᇯ㺞
1 ᴤᯠ㺘Ṭ
2 ḕⴻ㺘Ṭ
3 ⏢սঅս
4 ᦒ㇇䟿অս
5 ∄䟽
6 ٿ〫
HART
1 䟿᱐ሴ
2 䙊䇟䇮㖞
3 㓴ᘱ䱥⁑ᔿ
䠅᱖ሺ䠅᱖ሺ
1 а㓗䟿
2 Ҽ㓗䟿
3 й㓗䟿
4 ഋ㓗䟿
䙐䇥䇴㖤䙐䇥䇴㖤
1 䖞䈒ൠ൰
2 എ䐟⭥⍱⁑ᔿ
㓺ᘷ䱫⁗ᕅ㓺ᘷ䱫⁗ᕅ
1 䱥⁑ᔿ
2 䱥䘹亩
3 䱥ᰦ䳉 0
4 䱥ᰦ䳉 1
5 䱥ᰦ䳉 2
6 䱥ᰦ䳉 3
⁗ඍ࠼䞃⁗ඍ࠼䞃
1 ḕⴻ“⁑ඇ 1”࠶䝽
2 ḕⴻ“⁑ඇ 2”࠶䝽
3 ሶ⁑ඇ䇮㖞Ѫ P-Hi – P-Lo
4 ሶ⁑ඇ䇮㖞Ѫ P-Lo – P-Hi
5 ḕⴻ䇮༷ᤃᢁ
䇴༽ؗᚥ䇴༽ؗᚥ
㔝л亥...
䆜ᣛ䇴㖤䆜ᣛ䇴㖤
㔝л亥...
组态
2018 年 10 月
44
参考手册
00809-0106-4804, DA 版
组态

Home
1 Overview
2 Configure
3 Service Tools
Service Tools
1 Device Alerts
2 Variables
3 Trends
4 Maintenance
5 Simulate
Variables
1 System DP
2 P-Hi Pressure
3 P-Lo Pressure
4 P-Hi Module Temperature
5 P-Lo Module Temperature
6 Scaled Variable
Trends
1 System DP
2 P-Hi Pressure
3 P-Lo Pressure
4 P-Hi Module Temperature
5 P-Lo Module Temperature
6 Scaled Variable
Maintenance
1 Analog Calibration
2 System DP Calibration
3 P-Hi Calibration
4 P-Lo Calibration
5 Find Device
Analog Calibration
1 Analog Trim
2 Restore Factory Calibration
3 Analog Output Value
4 Percent of Range
5 Primary Variable
6 Upper Range Value
7 Lower Range Value
System DP Calibration
1 System DP Trim
2 Restore Factory Calibration
3 View Last Trim
4 View DP Limits
5 System DP Value
6 Data Quality
7 Status
8 Damping
P-Hi Calibration
1 P-Hi Sensor Trim
2 Restore Factory Calibration
3 View Last Trim
4 View P-Hi Sensor Limits
5 P-Hi Pressure Value
6 Data Quality
7 Status
8 Damping
P-Lo Calibration
1 P-Lo Sensor Trim
2 Restore Factory Calibration
3 View Last Trim
4 View P-Hi Sensor Limits
5 P-Lo Pressure Value
6 Data Quality
7 Status
8 Damping
P-Lo Sensor Trim
1 Upper Trim
2 Lower Trim
3 Zero Trim
4 Calibration Type
View Last Trim
1 Last Upper Trim
2 Last Lower Trim
View P-Lo Sensor Limits
1 Upper Limit
2 Lower Limit
3 Minimum Span
P-Lo Sensor Trim
1 Upper Trim
2 Lower Trim
3 Zero Trim
4 Calibration Type
View Last Trim
1 Last Upper Trim
2 Last Lower Trim
View P-Hi Sensor Limits
1 Upper Limit
2 Lower Limit
3 Minimum Span
Simulate
1 Loop Test
Device Information
1 General
2 Model Numbers
3 HART Revision Numbers
4 P-Hi Module Information
5 P-Lo Module Information
6 Alarm and Security
7. View Device Topology
Alert Setup
1 Pressure Alerts
2 Temperature Alerts
3 View Device Topology
Pressure Alerts
1 System DP
2 P-Hi Pressure
3 P-Lo Pressure
4 View Device Topology
Temperature Alerts
1 System DP
2 P-Hi Module Temperature
3 P-Lo Module Temperature
4 View Device Topology
General
1 Tag
2 Long Tag
3 Model
4 Date
5 Descriptor
6 Message
7 ERS Serial Number
Model Numbers
1 Model Number 1
2 Model Number 2
3 Model Number 3
4 Model Number 4
HART Revision Numbers
1 HART Universal
2 Field Device
3 Software
4 Hardware
P-Hi Module Information
1 Sensor Module Information
2 Flange Information
3 Remote Seal Information
P-Lo Module Information
1 Sensor Module Information
2 Flange Information
3 Remote Seal Information
Sensor Module Information
1 Sensor Module Serial Number
2. Type
3 Configuration
4 Sensor Range
5 Upper Limit
6 Lower Limit
7 Isolator Material
8 Fill Fluid
Flange Information
1 Process Connection
2 Connection Material
3 O-Ring Material
4 Drain / Vent Material
Remote Seal Information
1 Number of Seals
2 Remote Seal Type
3 Diaphragm Material
4. Fill Fluid
Sensor Module Information
1 Sensor Module Serial Number
2. Type
3 Configuration
4 Sensor Range
5 Upper Limit
6 Lower Limit
7 Isolator Material
8 Fill Fluid
Flange Information
1 Process Connection
2 Connection Material
3 O-Ring Material
4 Drain / Vent Material
Remote Seal Information
1 Number of Seals
2 Remote Seal Type
3 Diaphragm Material
4. Fill Fluid
Alarm and Security
1 Alarm Direction
2 High Alarm
3 High Saturation
4 Low Saturation
5 Low Alarm
6 Write Protect
Configure
1 Guided Setup
2 Manual Setup
3 Alert Setup
Manual Setup
1 Process Variables
2 Analog Output
3 Scaled Variable
4 Configuration Display
5 HART
6 Module Assignment
7 Device Information
参考手册
00809-0106-4804, DA 版
图 3-9. 警报设置、设备信息和维修工具
组态
组态
2018 年 10 月
45

ѱ享ѱ享
1 ᾲ䘠
2 㓴ᘱ
3 㔤؞ᐕާ
㔪ؤᐛޭ㔪ؤᐛޭ
1 䇮༷䆖ᣕ
2 䟿
3 䎻࣯
4 㔤ᣔ
5 ⁑ᤏ
䠅䠅
1 ㌫㔏ᐞ
2 P-Hi ࣋
3 P-Lo ࣋
4 P-Hi ⁑ඇᓖ
5 P-Lo ⁑ඇᓖ
6 ᦒ㇇䟿
䏁ࣵ䏁ࣵ
1 ㌫㔏ᐞ
2 P-Hi ࣋
3 P-Lo ࣋
4 P-Hi ⁑ඇᓖ
5 P-Lo ⁑ඇᓖ
6 ᦒ㇇䟿
㔪ᣚ㔪ᣚ
1 ⁑ᤏḷᇊ
2 ㌫㔏ᐞḷᇊ
3 P-Hi ḷᇊ
4 P-Lo ḷᇊ
5 ḕ䇮༷
⁗ᤕḽᇐ⁗ᤕḽᇐ
1 ⁑ᤏ䈳ṑ
2 ᚒ༽ࠪলḷᇊ
3 ⁑ᤏ䗃ࠪ٬
4 㤳തⲮ࠶∄
5 а㓗䟿
6 㤳തк䲀٬
7 㤳തл䲀٬
㌱㔕ᐤুḽᇐ㌱㔕ᐤুḽᇐ
1 ㌫㔏ᐞ䈳ṑ
2 ᚒ༽ࠪলḷᇊ
3 ḕⴻк⅑䈳ṑ
4 ḕⴻᐞ䲀٬
5 ㌫㔏ᐞ٬
6 ᮠᦞ䍘䟿
7 ⣦ᘱ
8 䱫ቬ
P-Hi ḽᇐḽᇐ
1 P-Hi Րᝏಘ䈳ṑ
2 ᚒ༽ࠪলḷᇊ
3 ḕⴻк⅑䈳ṑ
4 ḕⴻ P-Hi Րᝏಘᶱ䲀
5 P-Hi ࣋٬
6 ᮠᦞ䍘䟿
7 ⣦ᘱ
8 䱫ቬ
P-Lo ḽᇐḽᇐ
1 P-Lo Րᝏಘ䈳ṑ
2 ᚒ༽ࠪলḷᇊ
3 ḕⴻк⅑䈳ṑ
4 ḕⴻ P-Hi Րᝏಘᶱ䲀
5 P-Lo ࣋٬
6 ᮠᦞ䍘䟿
7 ⣦ᘱ
8 䱫ቬ
P-Lo Ֆಞ䈹ṗՖಞ䈹ṗ
1 к䲀䈳ṑ
2 л䲀䈳ṑ
3 䴦⛩䈳ṑ
4 ḷᇊ㊫ර
ḛⵁр⅗䈹ṗḛⵁр⅗䈹ṗ
1 к⅑к䲀䈳ṑ
2 к⅑л䲀䈳ṑ
ḛⵁḛⵁP-Lo Ֆಞᶷ䲆Ֆಞᶷ䲆
1 к䲀٬
2 л䲀٬
3 ᴰሿ䟿〻
P-Lo Ֆಞ䈹ṗՖಞ䈹ṗ
1 к䲀䈳ṑ
2 л䲀䈳ṑ
3 䴦⛩䈳ṑ
4 ḷᇊ㊫ර
ḛⵁр⅗䈹ṗḛⵁр⅗䈹ṗ
1 к⅑к䲀䈳ṑ
2 к⅑л䲀䈳ṑ
ḛⵁḛⵁP-Hi Ֆಞᶷ䲆Ֆಞᶷ䲆
1 к䲀٬
2 л䲀٬
3 ᴰሿ䟿〻
⁗ᤕ⁗ᤕ
1 എ䐟⍻䈅
䇴༽ؗᚥ䇴༽ؗᚥ
1 ᙫࡉ
2 ර
3 HAR
T ⡸ᵜ
4 P-Hi ⁑ඇؑ
5 P-Lo ⁑ඇؑ
6 ᣕ䆖઼ᆹޘ
7 ḕⴻ䇮༷ᤃᢁ
䆜ᣛ䇴㖤䆜ᣛ䇴㖤
1 ࣋䆖ᣕ
2 ᓖ䆖ᣕ
3 ḕⴻ䇮༷ᤃᢁ
ু࣑䆜ᣛু࣑䆜ᣛ
1 ㌫㔏ᐞ
2 P-Hi ࣋
3 P-Lo ࣋
4 ḕⴻ䇮༷ᤃᢁ
ᓜ䆜ᣛᓜ䆜ᣛ
1 ㌫㔏ᐞ
2 P-Hi ⁑ඇᓖ
3 P-Lo ⁑ඇᓖ
4 ḕⴻ䇮༷ᤃᢁ
ᑮ㿺ᑮ㿺
1 ս
2 䮯ս
3 ර
4 ᰕᵏ
5 ᧿䘠ㅖ
6 ؑ
7 ERS ᒿࡇ
8 ⭥ᆀ䜘Ԧᒿࡇ
ශශ
1 ර 1
2 ර 2
3 ර 3
4 ර 4
HART ⡾ᵢ⡾ᵢ
1 HART 䙊⭘
2 ⧠൪䇮༷
3 䖟Ԧ
4 ⺜Ԧ
P-Hi ⁗ඍؗᚥ⁗ඍؗᚥ
1 Րᝏಘ⁑ඇؑ
2 ⌅ޠؑ
3 䘌〻ᇶሱؑ
P-Lo ⁗ඍؗᚥ⁗ඍؗᚥ
1 Րᝏಘ⁑ඇؑ
2 ⌅ޠؑ
3 䘌〻ᇶሱؑ
Ֆಞ⁗ඍؗᚥՖಞ⁗ඍؗᚥ
1 Րᝏಘ⁑ඇᒿࡇ
2 ㊫ර
3 㓴ᘱ
4 Րᝏಘ㤳ത
5 к䲀٬
6 л䲀٬
7 䳄ಘᶀᯉ
8 ປݵ⏢
⌋ަؗᚥ⌋ަؗᚥ
1 䗷〻䘎᧕
2 䘎᧕Ԧᶀ䍘
3 O ᖒസᶀᯉ
4 ᧂ᭮/ᧂ≄ᶀᯉ
䘒ぁᇼሷؗᚥ䘒ぁᇼሷؗᚥ
1 ᇶሱԦᮠ䟿
2 䘌〻ᇶሱԦ㊫ර
3 㟌⡷ᶀᯉ
4 ປݵ⏢
Ֆಞ⁗ඍؗᚥՖಞ⁗ඍؗᚥ
1 Րᝏಘ⁑ඇᒿࡇ
2 ㊫ර
3 㓴ᘱ
4 Րᝏಘ㤳ത
5 к䲀٬
6 л䲀٬
7 䳄ಘᶀᯉ
8 ປݵ⏢
⌋ަؗᚥ⌋ަؗᚥ
1 䗷〻䘎᧕
2 䘎᧕Ԧᶀ䍘
3 O ᖒസᶀᯉ
4 ᧂ᭮/ᧂ≄ᶀᯉ
䘒ぁᇼሷؗᚥ䘒ぁᇼሷؗᚥ
1 ᇶሱԦᮠ䟿
2 䘌〻ᇶሱԦ㊫ර
3 㟌⡷ᶀᯉ
4 ປݵ⏢
ᣛ䆜ૂᆿޞᣛ䆜ૂᆿޞ
1 ᣕ䆖ᯩ
2 儈սᣕ䆖
3 儈ս価઼
4 վս価઼
5 վսᣕ䆖
6 ߉؍ᣔ
㓺ᘷ㓺ᘷ
1 䇮㖞ሬ
2 ࣘ䇮㖞
3 䆖ᣕ䇮㖞
ᢁࣞ䇴㖤ᢁࣞ䇴㖤
1 䗷〻䟿
2 ⁑ᤏ䗃ࠪ
3 ᦒ㇇䟿
4 㓴ᘱᱮ⽪
5 HAR
T
6 ⁑ඇ࠶䝽
7 䇮༷ؑ
组态
2018 年 10 月
46
参考手册
00809-0106-4804, DA 版
组态
参考手册
警告
00809-0106-4804, DA 版
第 4 节 操作和维护
概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 47 页
安全信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 47 页
标定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 48 页
功能测试 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 52 页
现场升级和更换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 53 页
4.1 概述
本节包含调试和操作 Rosemount™ 3051S 电子远程传感器 (ERS)™ 系统的信息。
提供对手操器执行操作和维护功能的说明。为了便于说明,在相应的标题下,现场手持通讯器的每个
软件功能的快捷键序列标为 “ 快捷键 ”。
操作和维护
2018 年 10 月
软件功能示例
快捷键
4.2 安全信息
执行操作时,为确保人身安全,请特别注意本节中的步骤和说明。可能引起潜在安全问题的信息用警
告符号 () 表示。执行带有该符号的操作前,请参阅以下安全信息。
不遵守这些安装指导可能导致死亡或严重受伤。
确保仅由具备资质的人员进行安装。
爆炸可能会导致死亡或严重伤害。
当电路带电时,请不要在易爆环境中拆除变送器护盖。
在易爆环境中连接现场手持通讯器之前,应确保回路中的仪器是按照本质安全或非易燃现场接线
惯例安装的。
为满足防火/防爆要求,变送器的两个盖子都必须完全盖上。
应验证变送器的工作环境是否与相应的危险场所认证一致。
1, 2, 3 等
操作和维护
47

操作和维护
警告
2018 年 10 月
参考手册
00809-0106-4804, DA 版
触电可能导致死亡或严重受伤。
如果 ERS 系统安装在高电压环境中并出现故障或安装错误,则变送器引线和端子上可能存在高压。
在与导线和端子接触时,应极其小心。
过程泄漏可能导致死亡或严重受伤。
在加压前,应安装并拧好全部四个法兰螺栓。
当变送器处于工作状态时,不得试图松开或拆卸法兰螺栓。
若把未经 Emerson
来危险。
只能使用由艾默生提供或销售的螺栓作为配件。
若阀组与传统法兰的组装不当,则可能损坏设备。
为了安全地把阀组与变送器法兰组装到一起,螺栓必须挤入法兰腹板的背面 (即,螺栓孔),但不得
与传感器模块接触。
静电可能损坏敏感部件。
应注意对静电敏感的部件的安全拿放注意事项。
™
认可的更换设备或备件用作配件,则可能降低变送器的保压能力,并给仪表带
4.3 标定
4.3.1 标定概述
标定罗斯蒙特 ERS 系统涉及以下任务:
1. 组态过程变量。
请参阅第 28 页上的 “ 基本设置 ” 以了解关于组态下述项的其他详细信息:
测量单位
阻尼
变量映射
4 和 20 mA 范围点
报警和饱和水平
2. 标定 P
执行零点/下限和上限传感器调校。
3. 差压零点调校。
对差压 (DP) 读数执行零点调校以确立基于零点的测量。
4. 标定 4—20 mA 输出。
调整模拟输出以匹配控制回路。
和 PLO 压力传感器。
HI
48
操作和维护

参考手册
00809-0106-4804, DA 版
4.3.2 PHI 和 PLO 传感器标定
操作和维护
2018 年 10 月
PHI 传感器
PLO 传感器
3, 4, 3, 1
3, 4, 4, 1
罗斯蒙特 3051S ERS 系统中的每个压力传感器都可以单独标定。通过将整个 ERS 系统与手操器或 AMS
设备管理器相连接,如图 2-10、图 2-11 和图 2-12 中所示,可以使用两个压力传感器的标定调校功能。
建议在初始安装时对 P
和 PLO 进行零点调校以消除任何安装位置影响。虽然不是强制要求,但是满量
HI
程标定 (上限和零点调校)可消除任何稳定性误差。
零点调校
零点调校是单点偏量调整。它可用于补偿安装位置的影响,在把变送器安装到其最终安装位置之后再
进行这种调整最有效。
注
传感器的压力读数与实际零点 (大气压)的偏差必须在 3% 以内以标定零点调校功能。
对于绝压式压力传感器,不能执行零点调校。为了修正安装位置对绝压传感器的影响,可执行传感器
下限调校。传感器下限调校功能提供与零点调校类似的偏量修正能力,但是不需要基于零点的输入。
要执行零点调校,请执行下面的程序:
1. 将 P
2. 等待 P
3. 使用 AMS 设备管理器或手操器,在 P
传感器连通大气。
HI/PLO
压力测量值稳定下来。
HI/PLO
传感器上执行零点调校功能。
HI/PLO
传感器上限和下限调校
传感器调校是一种两点传感器标定,在此过程中上下端点压力,这两点之间的所有读数都成线性。务
必先执行传感器下限调校,以确定正确的偏量。传感器上限调校根据传感器下限调校值与传感器特征
化曲线的斜率关联。
注
使用至少比实际变送器传感器的准确度高三倍的压力参考源,并在输入任何值之前使输入压力稳定最
少 10 秒。
要对 P
1. 使用 AMS 设备管理器或手操器启动 “Lower Sensor Trim” (传感器下限调校)功能。
2. 使用参考压力设备 (例如,高准确度静重测试仪)以物理方式对 P
3. 等待 P
4. 当 AMS 设备处理器或手操器发出提示时,定义要对 P
或 PLO 传感器执行两点传感器调校,请执行下面的程序:
HI
力值。
压力测量值稳定下来。
HI/PLO
HI/PLO
传感器应用多大的压力。
HI/PLO
传感器施加所需的低压
操作和维护
49

操作和维护
2018 年 10 月
参考手册
00809-0106-4804, DA 版
5. 使用 AMS 设备管理器或手操器启动 “Upper Sensor Trim” (传感器上限调校)功能。
6. 使用参考压力设备 (例如,高准确度静重测试仪)以物理方式对 P
力值。
7. 等待 P
8. 当 AMS 设备处理器或手操器发出提示时,定义要对 P
HI/PLO
4.3.3 DP 标定
快捷键
DP 标定功能可用于调整 ERS 系统的 DP 测量计算值。例如,如果当预期输出应为 “0 DP” 时罗斯蒙特
3051S ERS 系统的 DP 计算值存在小偏差,则可执行 DP 零点调校。
注
由于 DP 计算取决于 P
DP 标定功能。
对 PHI 和 PLO 进行零点调校可消除 DP 偏量。执行零点 DP 调校将可确立新 DP 零点 (并且无需再执行
剩余的 DP 零点调校)。安装和标定单个压力变送器之后以及 ERS 系统应用于实际过程条件之前,应执
行零点 DP 调校以确立基于零点的 DP 测量。
DP 零点调校
DP 零点调校功能可获取当前测量输出并强制将该值作为新零点参考,确立真正基于零点的 DP 计算。
只有当 ERS 系统的预期输出为 “0 DP” 时,才应执行 DP 零点调校。对于非基于零点的调校,应执行 DP
下限调校。
压力测量值稳定下来。
3, 4, 2, 1
和 PLO 压力测量,因此在每个 PHI 和 PLO 传感器上完成标定功能后应执行所有
HI
HI/PLO
传感器应用多大的压力。
HI/PLO
传感器施加所需的高压
DP 零点调校功能需要连接两个压力传感器。
要执行 DP 零点调校,请执行下面的程序:
1. 确保每个 PHI 和 PLO 压力传感器都按第 49 页中详述的方式进行标定,并按图 2-10、图 2-11 或
图 2-12 中所示的方式互连。
2. 使用 AMS 设备管理器或手操器启动 “DP Zero Trim” (DP 零点调校)功能。
3. 对 ERS 系统应用 “0 DP”,等待 DP 测量稳定下来。
4. 使用 AMS 设备管理器或手操器,在 ERS 系统上执行零点调校功能。
DP 上限和下限调校
DP 计算可利用两点标定进行调校,在此过程中上下端点压力,这两点之间的所有读数都成线性。
与 DP 零点调校功能不同, DP 上限和下限调校可在 ERS 系统在实际过程条件下受压时执行。
务必先执行 DP 下限调校,以确定正确的偏量。 DP 上限调校可提供斜率关联。
50
操作和维护

参考手册
00809-0106-4804, DA 版
要执行两点 DP 调校,请执行下面的程序:
1. 使用 AMS 设备管理器或手操器启动 “Lower DP Trim” (DP 下限调校)功能。
2. 使用物理方式对整个 ERS 系统施加所需的低 DP 值。这可能需要使用两个独立的参考压力设备。
3. 等待 DP 值稳定下来。
4. 当 AMS 设备处理器或手操器发出提示时,定义要对 ERS 系统应用的 DP 量。
5. 使用 AMS 设备管理器或手操器启动 “Upper DP Trim” (DP 上限调校)功能。
6. 使用物理方式对整个 ERS 系统施加所需的高 DP 值。这可能需要使用两个独立的参考压力设备。
7. 等待 DP 值稳定下来。
8. 当 AMS 设备处理器或手操器发出提示时,定义要对 ERS 系统应用的 DP 量。
4.3.4 模拟输出调整
操作和维护
2018 年 10 月
快捷键
模拟输出调校命令可用于调整 ERS 系统的 4—20 mA 输出以匹配工厂或控制系统标准。此命令仅影响驱
动模拟输出的数 - 模转换,不影响实际 DP 计算。
要执行模拟输出调校,请执行下面的程序:
1. 使用 AMS 设备管理器或手操器启动 “Analog Trim” (模拟调校)功能。
将参考毫安计连接到 ERS 主用传感器的 4—20 mA 输出。分别将正极引线和负极引线连接到正端子
和负端子。
2. 然后, “Analog Trim” (模拟调校)功能将强制将 ERS 系统的模拟输出设置为 4 mA。出现提示后,
输入从参考毫安计获得的 mA 读数。
3. ERS 系统的 mA 输出将根据在第 2 步中输入的值进行调整。
a. 如果参考毫安计的读数仍不为 “4 mA”,选择 NO (否),并重复第 2 步。
b. 如果参考毫安计的读数为 “4 mA”,选择 YES (是)并继续到第 4 步。
4. 对 20 mA 输出重复第 2 步和第 3 步。
4.3.5 调用工厂调校
模拟输出
DP
3, 4, 1, 1
3, 4, 1, 2
3, 4, 2, 2
操作和维护
PHI 传感器
PLO 传感器
调用工厂调校命令可以恢复模拟输出、 DP 以及 PHI 和 PLO 传感器标定的出厂设置值。在意外地进行了
调校或使用不精确压力源调校后,可使用此命令恢复。
3, 4, 3, 2
3, 4, 4, 2
51

操作和维护
0 - 0 - 0 - 0
2018 年 10 月
4.4 功能测试
参考手册
00809-0106-4804, DA 版
快捷键
回路测试命令验证 ERS 系统输出、4—20 mA 回路完整性、并验证安装在回路中的任何记录仪或类似装
置是否正确工作。
要执行回路测试,请执行下面的程序:
1. 将参考仪表连接到罗斯蒙特 ERS 主用传感器接线端子的测试端子上,或者在回路中的某点通过仪表
分流传感器的功率,从而把参考仪表连接到罗斯蒙特 ERS 系统。
2. 使用 AMS 设备管理器或手操器启动回路测试功能。
3. 出现提示后,选择 mA 值以在 4—20 mA 回路上获得 ERS 系统输出。
4. 检查测试回路中安装的参考仪表,验证并比较读数与 ERS 系统的预期 mA 输出。
a. 若数值相符,则表明 ERS 系统和回路已正确组态,并正确工作。
b. 如果数值不符,则表明参考仪表可能连接在错误的回路中,接线可能有错误, ERS 系统可能需
要模拟输出调校,或者参考仪表可能有故障。
4.4.1 查找设备
快捷键
查找设备功能可使 ERS 系统的 LCD 显示屏上闪烁独特的字符图案 ( 图 4-1),让工作人员能够轻松识别
系统。 “Find Device” (查找设备)功能要求在罗斯蒙特 3051S ERS 主用变送器上安装数字显示屏。
3, 5, 5
1, 7
图 4-1. “Find Device” (查找设备)图案
要运行查找设备功能,请执行下面的程序:
1. 使用 AMS 设备管理器或手操器启动查找设备功能。
2. ERS 系统将持续显示图 4-1 中所示的图案,直到 Find Device(查找设备)功能停止。请注意,在结
束 Find Device (查找设备)功能时, ERS 显示屏可能需要 60 秒才能恢复正常运行。
52
操作和维护

参考手册
00809-0106-4804, DA 版
4.5 现场升级和更换
4.5.1 分解的考虑因素
在分解过程中,若电路带电,则不应在易爆环境中卸下任何仪表护盖,否则会导致严重受伤或死亡。
另外,还应注意以下事项:
应遵循所有工厂安全条例和规程。
在从管线上拆除变送器之前,应隔离变送器并排空变送器中的过程介质。
断开可选的过程温度传感器引线和电缆。
卸下所有其它电线和导线管。
卸下四个法兰螺栓以及固定过程法兰的两个定位螺栓,把过程法兰拆下。
注意不要划伤、刺穿或压坏隔膜。
使用沾有性质温和的洗涤剂的软布清洁隔膜,然后用清水冲洗。
每次在拆卸过程法兰或适配器时,应观察 PTFE O 型圈是否有损坏迹象。艾默生建议尽可能重用
O 型圈。若 O 型圈有任何损坏迹象 (例如裂纹、切口或磨损),则应更换。
4.5.2 标记
操作和维护
2018 年 10 月
现场设备标签
SuperModule™ 上的标签反映重新订购完整 ERS 变送器时的替换型号,包括 SuperModule 组件和电子
部件外壳。电子部件外壳上压印的罗斯蒙特 300 ERS 型号代码可用于记录电子部件外壳组件。
4.5.3 拆卸接线端子板
电气连接在标记有 “FIELD TERMINALS” (现场端子)的仓室中的接线端子板上。
斯蒙特罗 3051S ERS 主用 (Plantweb™ 壳体)
松开位于 10 点钟和 4 点钟方向的两个小螺钉,并把整个接线端子板拉出。
罗斯蒙特 3051S ERS 备用 (接线盒)
松开位于 8 点钟和 4 点钟方向的两个小螺钉,并把整个接线端子板拉出。此步骤会使 SuperModule 连
接器露出 (请参阅图 4-3)。 握 住 SuperModule 连接器,并向上拉。
操作和维护
53

操作和维护
1
2
AB
㓵㠩 ERS ѱ⭞
2018 年 10 月
图 4-2. 接线端子
斯蒙特罗 3051S ERS 主用 斯蒙特罗 3051S ERS 备用
+
PWR/
COMM
_
1
⎁䈋
㓵㠩
2
ERS ༽⭞
_
B
A
4.5.4 拆卸电子部件
从罗斯蒙特 3051S ERS 主用变送器拆卸电子部件功能板:
参考手册
00809-0106-4804, DA 版
1. 卸下正对现场接线端子一侧的外壳盖。
2. 拆下 LCD 显示屏 (如果适用)。为此,应握住两个夹子,并向外拉。这样,将更容易接触到电子部
件功能板上的两个螺钉。
3. 松开组件上位于 8 点钟和 2 点钟位置的两个小螺钉。
4. 拉出组件,露出 SuperModule 连接器 (请参阅图 4-3)。
5. 握住 SuperModule 连接器,并向上拉 (不要拉接线)。可能需要转动外壳,以便操作锁舌。
图 4-3. SuperModule 电气连接器
斯蒙特罗 3051S ERS 主用 斯蒙特罗 3051S ERS 备用
54
操作和维护

参考手册
A
00809-0106-4804, DA 版
4.5.5 从外壳拆卸 SuperModule
重要事项
为了防止损坏 SuperModule 电缆,在从外壳组件上分离 SuperModule 之前,应当拆下功能板或接线端
子组件以及连接器。
3
1. 使用
2. 从 SuperModule 上拧下外壳。
图 4-4. 外壳转动限位螺钉的位置
/32 英寸六角扳手松开外壳转动限位螺钉一整圈。
Plantweb 外壳 接线盒外壳
操作和维护
2018 年 10 月
A. 外壳旋转限位螺钉 (3/32 in.)
4.5.6 把 SuperModule 连接到外壳
重要事项
必须在外壳底部安装 V 形密封件。
1. 在 SuperModule 的螺纹和 O 型圈上薄薄地涂一层低温硅脂。
2. 把外壳完全拧到 SuperModule 上。外壳与 SuperModule 齐平的误差不应超过一圈螺纹,以符合隔爆
要求。
3
3. 使用
/32 英寸六角扳手拧紧外壳转动限位螺钉。
4.5.7 安装电子组件
1. 在 SuperModule 的连接器上薄薄地涂一层低温硅脂。
2. 把 SuperModule 连接器插入 SuperModule 的顶端。
3. 把组件轻轻滑入外壳中,确保 Plantweb 外壳的针脚与组件上的插槽正确接合。
4. 拧紧系紧螺钉。
5. 装好并拧紧 Plantweb 外壳盖,使金属与金属接触,以满足隔爆要求。
操作和维护
55

操作和维护
2018 年 10 月
4.5.8 安装接线端子板
斯蒙特罗 3051S ERS 主用 (Plantweb 壳体)
1. 把接线端子板轻轻滑入外壳中,确保 Plantweb 外壳的针脚与接线端子板上的插槽正确接合。
2. 拧紧接线端子板上的系紧螺钉。
3. 装好并拧紧 Plantweb 外壳盖,使金属与金属接触,以满足隔爆要求。
罗斯蒙特 3051S ERS 备用 (接线盒)
1. 在 SuperModule 的连接器上薄薄地涂一层低温硅脂。
2. 把 SuperModule 连接器插入 SuperModule 的顶端。
3. 把接线端子板推入外壳中,并握住,以进行螺钉定位。
4. 拧紧系紧螺钉。
5. 装好并拧紧接线盒外壳盖,使金属与金属接触,以满足隔爆要求。
4.5.9 重新组装过程法兰
参考手册
00809-0106-4804, DA 版
注
若使用阀组安装,请参阅第 22 页上的 “ 罗斯蒙特阀组 ”。
1. 检查 SuperModule 的 PTFE O 型圈。如果 O 型圈未损坏,建议可以重用。如果 O 型圈损坏 (例如如
果有裂纹或切口),应把其更换为新 O 型圈。
注
如果更换 O 型圈,在拆卸损坏的 O 型圈时,注意不要划伤或损伤 O 型圈的凹槽或隔膜的表面。
2. 在 SuperModule 上安装过程法兰。为了使过程法兰固定就位,应安装两个定位螺钉,并用手拧紧
(螺钉不能受压)。不要拧得过紧;这会影响模块与法兰的对位。
3. 安装适当的法兰螺栓。
1
a. 若安装需要
b. 若安装需要
螺栓。转到步骤 c。
c. 在用手拧紧螺栓时,应使法兰适配器和适配器 O 型圈保持就位。转到步骤 e。
d. 用手指先拧紧螺栓。
e. 按交叉模式把螺栓拧紧到初始扭矩值。具体扭矩值请参阅第 57 页上的表 4-1。
f. 按交叉模式把螺栓拧紧到最终扭矩值。具体扭矩值请参阅表 4-1。在完全拧紧时,螺栓应穿入
模块外壳的顶部。
/4-18 NPT 连接件,则应使用四个 1.75 英寸法兰螺栓。转到步骤 d。
1
/2-14 NPT 连接件,则应使用两个 2.88 英寸过程法兰/适配器螺栓和两个 1.75 英寸
56
操作和维护

参考手册
00809-0106-4804, DA 版
g. 如果安装时使用常规阀组,则使用随罗斯蒙特 3051S ERS 传感器提供的 1.75 英寸法兰螺栓把法
表 4-1. 螺栓安装扭矩值
螺栓材料 初始扭矩值 最终扭矩值
CS-ASTM-A445 标准 34 牛 - 米(300 英寸 - 磅) 73 牛 - 米(650 英寸 - 磅)
316 不锈钢 - 选项 L4 17 牛 - 米(150 英寸 - 磅) 34 牛 - 米(300 英寸 - 磅)
ASTM-A-193-B7M - 选项 L5 34 牛 - 米(300 英寸 - 磅) 73 牛 - 米(650 英寸 - 磅)
合金 K-500 - 选项 L6 34 牛 - 米(300 英寸 - 磅) 73 牛 - 米(650 英寸 - 磅)
ASTM-A-453-660 - 选项 L7 17 牛 - 米(150 英寸 - 磅) 34 牛 - 米(300 英寸 - 磅)
ASTM-A-193-B8M - 选项 L8 34 牛 - 米(150 英寸 - 磅) 34 牛 - 米(300 英寸 - 磅)
4. 若更换了 PTFE SuperModule O 型圈,则在安装后应重新拧紧法兰螺栓,以补偿冷流体流量。
5. 安装排放/排气阀。
a. 在阀座的螺纹上缠密封带。从阀门的底座开始,使螺纹端朝向安装者,按顺时针方向转动缠两
b. 注意阀门孔口的位置,应保证当阀门处于打开状态时过程流体朝地面排放,避免触及到人员。
c. 把排放/排气阀拧紧到 28.25 牛-米(250 英寸-磅)。
操作和维护
2018 年 10 月
兰接头安装到阀组的过程端。
圈密封带。
操作和维护
57

操作和维护
2018 年 10 月
参考手册
00809-0106-4804, DA 版
58
操作和维护
参考手册
00809-0106-4804, DA 版
第 5 节 故障排除
概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 59 页
设备概览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 59 页
测量质量状态 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 63 页
5.1 概述
本节包含排除 Rosemount™ 3051S 电子远程传感器 (ERS)™ 系统故障的信息。诊断消息通过 LCD 显示
屏或 HART
5.2 设备概览
执行操作时,为确保人身安全,请特别注意本节中的步骤和说明。可能引起潜在安全问题的信息用警
告符号 () 表示。执行带有该符号的操作前,请参阅以下安全信息。
®
主机传送。
故障排除
2018 年 10 月
5.2.1 HART 主机诊断
ERS 系统可通过 HART 主机提供多种诊断警报,包括手操器在和 AMS™ 设备管理器。
表 5-1 列出了使用 ERS 系统时可能显示的诊断警报。表格中提供了每个警报的简要说明以及推荐的纠
正措施。
表 5-2 汇总了最常见运转问题的维护与故障处理建议。即使手操器或主机上没有任何诊断信息,但是
若怀疑有故障,则应按此处说明的步骤检查 ERS 系统和过程连接件是否处于良好的工作状态。
5.2.2 LCD 显示屏上的诊断信息
ERS 系统上的选装 LCD 可显示缩略的操作、错误和警告消息,以便进行故障排除。消息按其优先级顺
序出现;正常工作消息出现在最后。如果想确定消息的原因,可以使用 HART 主机进一步询问 ERS 系
统。每条 LCD 诊断消息伴随有一条描述。
错误消息
在 LCD 显示屏上出现的错误指示符消息用于警告存在影响 ERS 系统工作的严重问题。错误消息一直显
示到错误条件被纠正;在显示屏的底部会出现 ERROR (错误)。
警告信息
在 LCD 显示屏上出现的警告消息用于提醒用户:ERS 系统或当前运行存在可由用户修复的问题。警告
消息与其它信息轮流出现,直到警告条件被纠正,或者 ERS 系统完成了触发警告消息的操作任务。
故障排除
59

故障排除
2018 年 10 月
表 5-1. 诊断消息故障排除
参考手册
00809-0106-4804, DA 版
LCD 显示屏
消息
CURR
SAT
DP
ALERT
FAI L
BOARD
ERROR
FAI L
P
HI
ERROR
FAI L
PLO
ERROR
FAI L
T
HI
ERROR
FAI L
T
LO
ERROR
P
HI
ALERT
P
HI
COMM
ERROR
P
HI
LIMIT
P
LO
ALERT
P
LO
COMM
ERROR
PLO
LIMIT
LOOP
TEST
SNSR
COMM
ERROR
SNSR
CONFIG
ERROR
主机诊断消息 可能的问题 推荐措施
mA Output Saturated
(毫安输出饱和)
System DP Alert
(系统 DP 报警)
Electronics Error
(电子部件错误)
PHI Module Failure
(P
模块故障)
HI
PLO Module Failure
(P
故障模块)
LO
PHI Module Failure
(P
模块故障)
HI
PLO Module Failure
(P
故障模块)
LO
PHI Pressure Alert
(P
压力警报)
HI
PHI Module
Communication
Error (P
模块通讯
HI
错误)
PHI Pressure Out of
Limits (P
压力超
HI
出限制)
PLO Pressure Alert
(P
压力警报)
LO
PLO Module
Communication
Error (P
模块通讯
LO
错误)
PLO Pressure Out of
Limits (P
压力超
LO
出限制)
mA Output Fixed
(毫安输出固定)
Sensor Module
Missing (传感器模
块丢失)
No PHI Module
Configuration
Present (不存在
PHI 模块组态)
初级变量超过为 4—20 mA 模拟输出信号
定义的范围点。模拟输出被固定为低饱和
检查过程条件,并根据需要修改模拟范围值。
点或高饱和点,不代表当前过程条件。
ERS 系统正在测量超过组态的报警上限或
下限值的差压值。
ERS 主用设备中的电子部件功能板发生
故障。
PHI 传感器模块发生故障。
PLO 传感器模块发生故障。
PHI 传感器模块发生故障。
PLO 传感器模块发生故障。
PHI 传感器模块检测到压力值超过组态的
报警上限和下限值。
P-Hi 传感器模块和电子部件功能板之间的
通讯中断。
验证测得的 DP 超过触发限值。如有必要,修
改触发限值或禁用诊断。
更换电子部件功能板。
验证 PHI 模块温度在传感器的工作限值内。
如有必要,更换 P
验证 PLO 模块温度在传感器的工作限值内。
如有必要,更换 PLO 传感器模块。
验证 PHI 模块温度在传感器的工作限值内。
如有必要,更换 PHI 传感器模块。
验证 PLO 模块温度在传感器的工作限值内。
如有必要,更换 PLO 传感器模块。
验证测得的 PHI 压力超过触发限值。如有必
要,修改触发限值或禁用诊断。
检查 PHI 模块与电子部件功能板之间的接
线,重启整个 ERS 系统的电源。如有必要,
更换 P
HI
PHI 压力读数超过传感器的最大测量范围。 检查可能存在过压条件的过程。
PLO 传感器模块检测到压力值超过组态的
报警上限和下限值。
PLO 传感器模块和电子部件功能板之间的
通讯中断。
验证测得的 PLO 压力超过触发限值。如有必
要,修改触发限值或禁用诊断。
检查 PLO 模块与电子部件功能板之间的接
线,重启整个 ERS 系统的电源。如有必要,
更换 P
LO
PLO 压力读数超过传感器的最大测量范围。 检查可能存在过压条件的过程。
ERS 系统的模拟输出处于 “ 固定电流模
式 ”,是代表 HART 一级变量。
使用手操器或 AMS 设备管理器,禁用 “Loop
Current Mode” (回路电流模式)。
传感器模块丢失或未检测到。 验证两个传感器都已连接并正确接线。
ERS 系统的任何模块都未组态为 PHI 传
感器。
验证两个传感器都已连接并正确接线。使用
手操器或 AMS 设备管理器将两个模块之一
的压力指定更改为 “P
传感器模块。
HI
模块和/或电子部件功能板。
模块和/或电子部件功能板。
”。
HI
60
故障排除

参考手册
00809-0106-4804, DA 版
表 5-1. 诊断消息故障排除
故障排除
2018 年 10 月
LCD 显示屏
消息
SNSR
CONFIG
ERROR
SNSR
CONFIG
ERROR
SNSR
INCOMP
ERROR
STUCK
KEY
STUCK
KEY
T
HI
ALERT
T
HI
LIMIT
T
LO
ALERT
TLO
LIMIT
XMTR
INFO
XMTR
INFO
ERROR
(LCD 无显
示)
NO UPDATE
主机诊断消息 可能的问题 推荐措施
No PLO Module
Configuration
Present (不存在
PLO 模块组态)
Unknown Sensor
Module Configuration
(未知传感器模块
组态)
Sensor Module
Incompatibility (传
感器模块不兼容)
Stuck “Span” Button
(“ 量程 ” 按钮粘滞)
Stuck “Zero” Button
(“ 零点 ” 按钮粘滞)
PHI Temperature
Alert (P
HI
温度
报警)
PHI Module Temp.
Out of Limits (P
HI
模块温度超出限制)
PLO Tem pera ture
Alert (P
LO
温度
报警)
PLO Module Temp.
Out of Limits (P
LO
模块温度超出限制)
Non-Volatile
Memory Warning
(非易失存储器警告)
Non-Volatile Memory
Error (非易失存储
器错误)
LCD Update Error
(LCD 更新错误)
LCD Update Error
(LCD 更新错误)
ERS 系统的任何模块都未组态为 PLO 传
感器。
一个或两个传感器模块的组态未知。
ERS 系统包含的两个传感器模块无法共同
工作。
电子部件功能板上的 “Span”(量程)按钮
粘滞。
电子部件功能板上的 “Zero” (零点)按钮
粘滞。
PHI 传感器模块检测到温度值超过组态的
报警上限和下限值。
PHI 压力模块上的内部温度传感器超出了
安全工作范围。
PLO 传感器模块检测到温度值超过组态的
报警上限和下限值。
PLO 压力模块上的内部温度传感器超出了
安全工作范围。
ERS 系统信息数据不完整。 ERS 系统操作
将不受影响。
设备的非易失数据损坏。 更换电子部件功能板。
ERS 主用设备上的电子部件电路板与 LCD
显示屏的通讯中断。
ERS 主用设备上的 LCD 显示屏未更新
验证两个传感器都已连接并正确接线。使用
手操器或 AMS 设备管理器将两个模块之一
的压力指定更改为 “PLO”。
验证两个传感器都已连接并正确接线。使用
手操器或 AMS 设备管理器,将两个模块之一
指定为 “P
“PLO” 传感器。
ERS 系统不能包含一个表压和一个绝压传感
器。更换两个模块之一,使两个传感器都为
表压或绝压型。
找到 ERS 主用设备,拆下外壳前盖(考虑危
险地点要求),轻轻地撬起量程按钮。
找到 ERS 主用设备,拆下外壳前盖(考虑危
险地点要求),轻轻地撬起零点按钮。
验证测得的 PHI 温度超过触发限值。如有必
要,修改触发限值或禁用诊断。
验证环境条件未超过压力模块的温度限制
(—40 至 85 °C/—40 至 185 °F)。
验证测得的 PLO 温度超过触发限值。如有必
要,修改触发限值或禁用诊断。
验证环境条件未超过压力模块的温度限制
(—40 至 85 °C/—40 至 185 °F)。
在下一次维护停机时更换电子部件功能板。
检查 LCD 连接器,重新安装并重新接通 LCD
显示屏电源。若此问题持续存在,则首先应
更换 LCD 显示屏,然后根据需要更换功能板
电子装置。
确保安装了正确的 LCD 显示屏(请参阅订购
信息、技术规格和图纸
屏部件号)。
” 传感器,另一个模块指定为
HI
以了解 LCD 显示
故障排除
61

故障排除
2018 年 10 月
表 5-2. 罗斯蒙特 ERS 系统故障排除
症状 纠正措施
• 验证已为 ERS 主用设备上的 “+” 和 “-” PWR/COMM 端子加电
罗斯蒙特 ERS 系统的 mA 输出为零
罗斯蒙特 ERS 系统不与手操器或 AMS 设备管理器
通讯
罗斯蒙特 ERS 系统的 mA 输出过低或过高
罗斯蒙特 ERS 系统对被测过程变量的变化无响应
数字变量输出过低或过高
数字变量输出不稳
罗斯蒙特 ERS 系统输出正常,但是 LCD 显示屏关
闭,诊断显示是 LCD 显示屏的问题
DP 计算结果为负值
• 检查电源线的极性是否反了
• 验证端子电压为 16 至 42.4 Vdc
• 检查 ERS 主用设备上的测试端子间的二极管是否断路。
• 检查输出是在 4 和 20 毫安之间还是处于饱和水平
• 检查变送器的直流供电是否纯净 (最高 0.2 伏峰峰值交流噪音)
• 检查回路电阻, 250—1,321
• 检查 ERS 系统是否处于另一个 HART 地址
• 验证应用的过程条件
• 验证所需的过程变量已映射 HART 一级变量
• 检查 4 和 20 毫安范围点
• 验证输出未处于报警状态或饱和状态
• 可能需要进行模拟输出调整或传感器量程调整
• 进行检查以确保隔离阀未关闭
• 检查测试设备
• 检查导压管或阀组是否被堵
• 检查初级变量测量值是否在 4 和 20 mA 设定点之间
• 验证输出未处于报警状态或饱和状态
• 验证 ERS 系统未处于回路测试、多点、测试计算或固定变量模式
• 检查测试设备 (检查精度)
• 检查导压管是否被堵,接液支管中的填充液是否太少
• 验证每个压力传感器上的传感器调校
• 验证被测变量处在所有传感器限值范围之内
• 验证 ERS 系统的电源有足够的电压和电流
• 检查是否有外部电气干扰
• 验证 ERS 系统已正确接地
• 验证双绞线的屏蔽层仅在两端接地
• 验证 LCD 显示屏安装正确
• 更换 LCD 显示屏
• AO 饱和度低,验证 DP 变量是可能的值 — 如果为负值,可以反转 P
00809-0106-4804, DA 版
回路电阻 = (供电电压 — 变送器电压)/回路电流
参考手册
和 PLO。
HI
62
故障排除

参考手册
A
00809-0106-4804, DA 版
5.3 测量质量状态
罗斯蒙特 ERS 系统符合 HART 第 6 版标准。HART 第 6 版标准的一个最显著增强之处是,每个变量有测
量质量状态。这些状态可在 AMS 设备处理器中、通过手操器或在任何兼容 HART 第 6 版的主机系统上
查看。
图 5-1. 测量质量状态
故障排除
2018 年 10 月
A. 关于 DP 测量状态的质量状态
可能的测量质量状态
Good (良好):在设备正常工作时显示。
Poor (不佳):指示被测变量的精度受到影响。例如, P-Hi 模块温度功能失败,不再补偿 P-Hi 压力
测量。
Bad (差):指示变量失效。例如, P-Hi 压力传感器发生故障。
5.4 服务支持
若希望加快美国以外的返修程序,请与最近的罗斯蒙特代表联系。
在美国境内,请拨打免费电话 1-800-654-RSMT (7768),致电 Emerson
全天候服务,会为您提供所需的任何信息或材料。
该中心将询问产品型号和序列号,并将提供退回材料授权 (RMA) 号。该中心还将询问产品上一次接触
的过程材料。
™
仪表与阀门响应中心。该中心
故障排除
63

故障排除
小心
2018 年 10 月
参考手册
00809-0106-4804, DA 版
对于处理接触危险物质的产品的人员,若知悉并了解危险,则可以避免伤害。若退回的产品曾接
触过 OSHA 所定义的危险物质,则在退回货物中必须随附各危险物质的必要材料安全数据表
(MSDS) 的复印件。
艾默生仪表与阀门响应中心的代表会说明在退回曾接触危险物质的货物时所需的附加信息和程序。
64
故障排除

参考手册
00809-0106-4804, DA 版
第 6 节 安全仪表系统要求
安全仪表系统 (SIS) 认证 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 65 页
6.1 安全仪表系统 (SIS) 认证
Rosemount™ 3051S 电子远程传感器 (ERS)™ 系统是一种两线制 4—20 mA 架构,可使用通过数字电线
互连的两个压力传感器以电子方式计算差压。该变送器系统使用标准的成熟传感器板,并与执行诊断
的微处理器板组合。它可编程为当检测到内部故障时将其输出发送到高位或低位的指定故障状态。它
假定 4—20 mA 输出用作一级安全变量。此报告中不包含其他输出变体;类型 B。
SIL 2:随机完整性 @ HFT=0
SIL 3:随机完整性 @ HFT=1
SIL 3:系统级完整性
6.1.1 罗斯蒙特 ERS 系统安全认证标识
安全仪表系统
2018 年 10 月
所有罗斯蒙特 3051S 变送器在安装到 SIS 系统中之前必须标识为已通过安全认证。
为了识别通过安全认证的罗斯蒙特 ERS 系统,验证以下信息:
型号字符串应包含 3051SAM、 3051SAL_P 或 3051SAL_S
软件版本应为 57 或更高
型号字符串应包含选件代码 QT
SIS 认证要求的 ERS 电缆最大长度为 60.96 米( 200 英尺)。电缆还必须符合第 17 页上的 “ 罗斯蒙特
3051S ERS 系统电缆规格 ” 中的技术规格。
6.1.2 在 SIS 应用中安装
安装应由合格人员进行。除了第 16 页上的 “ 接线并通电 ” 所述的标准安装规范外,不要求进行特殊安
装。务必安装电子装置外壳盖,使金属紧贴金属,从而确保完全密封。
环境和工作限值在附录 A:参考数据中给出。
回路的设计应保证当变送器输出设置为 23 mA 时端子电压不会降到低于 16 Vdc。请参阅附录 A:参考
数据以验证限值。
把安全开关置于 () 位置,以防止在正常工作期间组态数据被意外或蓄意更改。
安全仪表系统
65
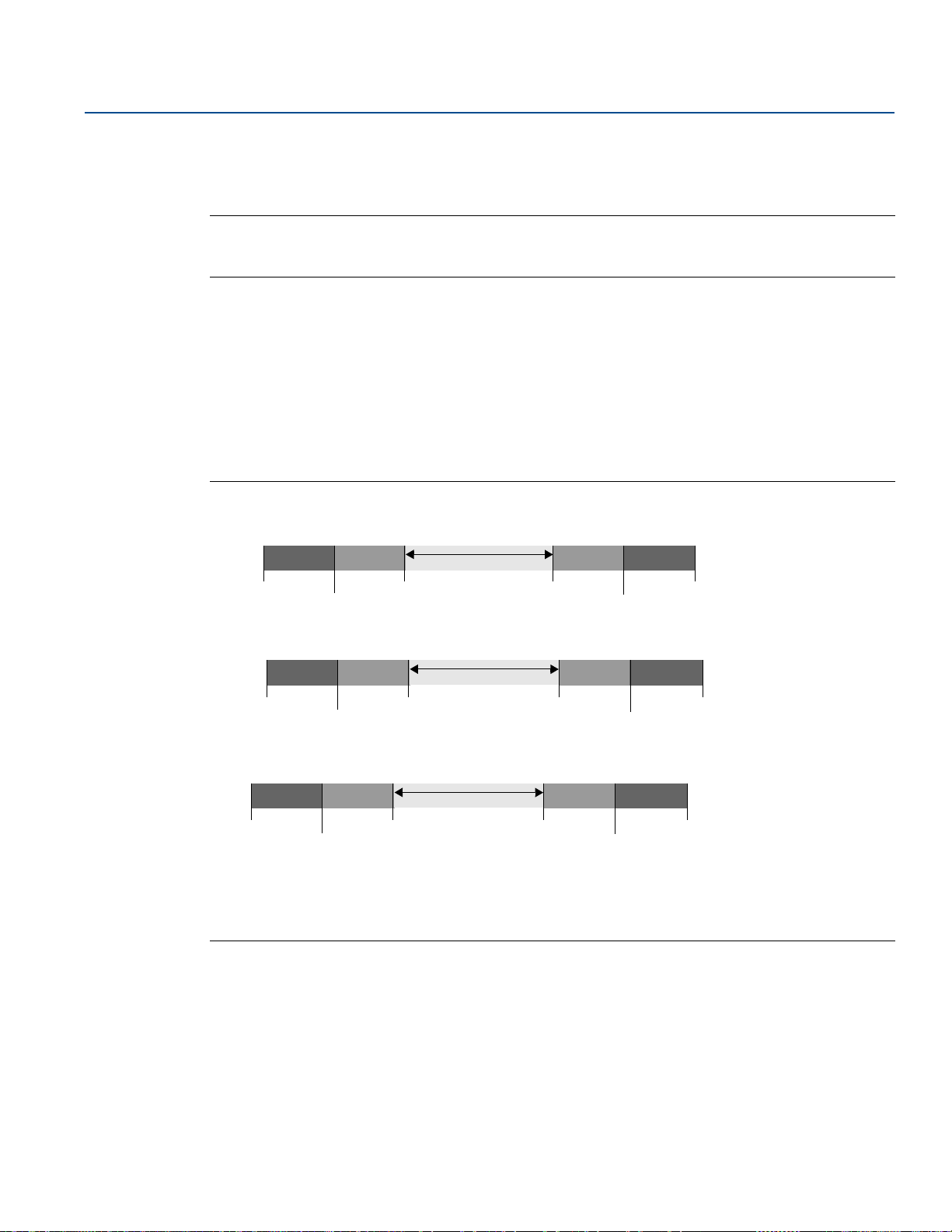
安全仪表系统
正常工作
4 mA
20 mA
20.8 mA
高位饱和
21.75
(2)
3.9 mA
低位饱和
3.75 mA
(1)
正常工作
4 mA
20 mA
20.5 mA
高位饱和
22.5
(2)
3.8 mA
低位饱和
3.6 mA
(1)
4 mA
20 mA
20.1 - 22.9 mA
高位饱和
20.2 - 23.0
(2)
3.7 - 3.9 mA
低位饱和
3.6 - 3.8 mA
(1)
正常工作
2018 年 10 月
6.1.3 在 SIS 应用中组态
使用任何支持 HART® 的组态工具与罗斯蒙特 ERS 系统通讯,并验证其组态。
注
在下列情况中,变送器输出与安全无关:组态变化、多点通讯和回路测试。在变送器的组态和维护活
动中,应使用其他方法确保过程的安全性。
阻尼
用户选择的阻尼将影响变送器对应用过程变化的响应能力。阻尼值 + 响应时间不得超过回路要求。
更改阻尼值的方法请参阅第 29 页上的 “Damping (阻尼) ”。
报警和饱和水平
参考手册
00809-0106-4804, DA 版
分布式控制系统
(DCS)
水平和其工作值。
图 6-1. 报警水平
或安全逻辑解算器的组态应与变送器的组态相符。图 6-1示出了三个可用的报警
罗斯蒙特报警水平
Namur 报警水平
自定义报警水平
66
1. LO 位的变送器故障、硬件或软件报警。
2. HI 位的变送器故障、硬件或软件报警。
安全仪表系统

参考手册
00809-0106-4804, DA 版
6.1.4 罗斯蒙特 3051S SIS 操作和维护
验证测试
建议进行以下验证测试。
安全仪表系统
2018 年 10 月
如果发现安全和功能错误,必须在 Emerson.com/Rosemount/Safety-Web-Apps/Report
试结果和采取的纠正措施。
所有验证测试步骤必须由合格人员进行。
使用第 48 页上的 “ 标定 ” 中的快捷键执行回路测试、模拟输出调校或传感器调校。在执行验证测试过
程中,安全开关应置于 () 位置,并在执行后重新置于 () 位置。
中记录验证测
全面验证测试
全面验证测试包括执行与简单验证测试相同的步骤,但是对压力传感器进行两点标定。请参阅 FMEDA
报告,以了解设备中可能出现的 DU 故障率。
FMEDA 报告可从下面的位置找到:Emerson.com/Rosemount/Safety
需要的工具:手操器和压力标定设备。
1. 使安全功能旁路,并采取必要的措施以避免假触发。
2. 通过 HART 通讯获取任何诊断信息,并采取适当的措施。
3. 向变送器发送 HART 命令,以转为高位报警电流输出,并验证模拟电流达到该值
4. 向变送器发送 HART 命令,以转为低位报警电流输出,并确保模拟电流达到该值
5. 执行完整系统标定 (P
6. 取消旁路,并恢复正常工作状态。
7. 把安全开关置于 () 位置。
和 PLO的零点和上限调校, DP 的零点调校)
HI
。
(1)
(2)
。
。
注
由用户确定导压管验证测试要求。
自动诊断针对已纠正的 % DU:此测试由设备在运转过程中在内部执行,无需用户干预或编程。
6.1.5 检查
目视检查
未要求
特殊工具
未要求
1. 此步测试输入电压是否符合要求,例如供电电压过低,或者接线电阻过高。此操作还测试其他潜在故障。
2. 此操作将测试与无信号电流有关的潜在故障。
安全仪表系统
67

安全仪表系统
2018 年 10 月
00809-0106-4804, DA 版
产品维修
罗斯蒙特 3051S ERS 可通过更换主要部件进行维修。
必须报告由变送器诊断或验证测试检测到的所有故障。反馈可通过电子方式在
Emerson.com/Rosemount/Safety-Web-Apps/Report
所有产品维修和部件更换工作应由合格人员进行。
提交。
罗斯蒙特 3051S ERS SIS 参考
必须按照附录 A:参考数据中提供的功能和性能规范操作罗斯蒙特 3051S ERS。
故障率数据
FMEDA 报告包含故障率。报告可从 Emerson.com/Rosemount/Safety 获得。
故障值
安全偏差 (定义了危险故障的模拟量程偏移 %): 2%
系统响应时间:请参阅第 69 页上的 “ 订购信息、技术规格和图纸 ”
自我诊断测试间隔时间:每 60 分钟至少一次
参考手册
产品寿命
50 年 - 基于最坏情况的部件损耗机制 (不是基于过程接液材料的损耗)
请在 Emerson.com/Rosemount/Safety-Products/Equipment-lists
报告与安全相关的任何产品信息。
68
安全仪表系统

参考手册
00809-0106-4804, DA 版
附录 A 参考数据
产品认证 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 69 页
订购信息、技术规格和图纸 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 第 69 页
A.1 产品认证
要查看最新的 Rosemount™ 3051S ERS™ 产品认证,请按如
下步骤操作:
参考数据
2018 年 10 月
1. 转到 Emerson.com/Rosemount/Rosemount-3051S-ERS
2. 根据需要滚动到绿色菜单栏,然后单击 Documents &
Drawings (文档与图纸)。
3. 单击 Manuals & Guides (手册和指南)。
4. 选择相应的快速启动指南。
。
A.2 订购信息、技术规格和图纸
要查看最新的罗斯蒙特 3051S ERS 订购信息、技术规格和
图纸,请按如下步骤操作:
1. 转到 Emerson.com/Rosemount/Rosemount-3051S-ERS
2. 根据需要滚动到绿色菜单栏,然后单击 Documents &
Drawings (文档与图纸)。
3. 要查看安装图,请单击 Drawings & Schematics (图
纸与原理图),然后选择相应的文档。
4. 要查看订购信息、技术规格和尺寸图,请单击 Data
Sheets & Bulletins (数据清单与公告),然后选择相
应的产品数据表。
。
参考数据
69

参考手册
00809-0106-4804, DA 版
参考数据
2018 年 10 月
A.3 备件
传感器模块
请参阅罗斯蒙特 3051S 产品数据表中的 3051S_C、3051S_T 和 3051SAL_C 订购表以了解如何订购备用罗斯蒙特 3051S 传感器模块。
在型号内使用外壳型式代码 00。
•型号示例:3051S1CG4A2000A00
外壳组件
请参阅第 106 页上的表 A-14 以了解如何订购备用外壳组件。
•型号示例:300ERSP1AAM5
电子部件板 (仅限 ERS 主用设备)
罗斯蒙特 3051S ERS 电子部件功能板套件
适用于分体式显示屏外壳的罗斯蒙特 3051S ERS 电子部件功能板套件
LCD 显示屏 (仅限主用设备)
带延长铝质外壳盖的 LCD 显示屏
带延长不锈钢外壳盖的 LCD 显示屏
仅 LCD 显示屏
用于 LCD 显示屏的铝质外壳盖
用于 LCD 显示屏的不锈钢外壳盖
接线端子
用于 ERS 主用设备的接线端子
用于 ERS 主用设备的瞬态接线端子
用于 ERS 备用设备的接线端子
盖
铝制电子部件盖和 O 型圈
316L 不锈钢电子部件盖和 O 型圈
其他外壳零件
外部接地螺钉组件 (选件 D4):螺钉、夹子 、垫圈
外壳 V 形密封件 (用于 Plantweb 和接线盒外壳)
法兰 (用于表压/绝压传感器)
共平面法兰:镀镍碳钢
共平面法兰:316 不锈钢
共平面法兰:铸造 C-2 76
共平面法兰:铸造合金 400
共平面法兰调整螺钉 (12 个一包)
传统法兰:316 不锈钢
传统法兰:铸造 C-2 76
传统法兰:铸造合金 400
液位法兰,竖直安装:2 英寸 150 级,不锈钢
液位法兰,竖直安装:2 英寸 300 级,不锈钢
液位法兰,竖直安装:3 英寸 150 级,不锈钢
液位法兰,竖直安装:3 英寸 300 级,不锈钢
液位法兰,竖直安装:DN 50、 PN 40
液位法兰,竖直安装:DN 80、 PN 40
03151-9028-0001
03151-9028-0002
00753-9004-0001
00753-9004-0004
00753-9004-0002
00753-9004-0003
00753-9004-0005
03151-9006-1001
03151-9006-1002
03151-9000-3001
03151-9030-0001
03151-9030-0002
03151-9060-0001
03151-9061-0001
03151-9200-1025
03151-9200-1022
03151-9200-1023
03151-9200-1024
03151-9202-0001
03151-9203-0002
03151-9203-0003
03151-9203-0004
03151-9205-0221
03151-9205-0222
03151-9205-0231
03151-9205-0232
03151-9205-1002
03151-9205-1012
参考数据
70

参考数据
2018 年 10 月
法兰适配器套件 (每个套件包含适配器、螺栓和 O 型圈 [2 个])
碳钢螺栓、玻璃填充 PTFE O 型圈
不锈钢适配器
铸造 C-276 适配器
铸造合金 400 适配器
镀镍碳钢适配器
不锈钢螺栓、玻璃填充 PTFE O 型圈
不锈钢适配器
铸造 C-276 适配器
铸造合金 400 适配器
镀镍碳钢适配器
法兰适配器套件 (每个套件包含适配器、螺栓和 O 型圈 [2 个])
碳钢螺栓、石墨填充 PTFE O 型圈
不锈钢适配器
铸造 C-276 适配器
铸造合金 400 适配器
镀镍碳钢适配器
不锈钢螺栓、石墨填充 PTFE O 型圈
不锈钢适配器
铸造 C-276 适配器
铸造合金 400 适配器
镀镍碳钢适配器
法兰适配器
镀镍碳钢
316 不锈钢
铸铁 C-276
铸造合金 400
排液/排气套件
316 不锈钢阀杆和阀座套件
合金 C-276 阀杆和阀座套件
合金 K-500 阀杆和合金 400 阀座套件
316 不锈钢陶瓷球排液/排气套件
合金 C-276 陶瓷球排液/排气套件
合金 400/K-500 陶瓷球排液/排气套件
O 型圈 (12 个)
电子装置外壳,盖
电子装置外壳,模块
过程法兰,玻璃填充 PTFE
过程法兰,石墨填充 PTFE
法兰适配器,玻璃填充 PTFE
法兰适配器,石墨填充 PTFE
密封套和衬圈套件
密封套和衬圈套件
铠装电缆密封套, 711/A/050/NPT CBL GLAND IECEx
铠装电缆密封套, 711/A/050/M20 CBL GLAND IECEx
参考手册
00809-0106-4804, DA 版
03031-1300-0002
03031-1300-0003
03031-1300-0004
03031-1300-0005
03031-1300-0012
03031-1300-0013
03031-1300-0014
03031-1300-0015
03031-1300-0102
03031-1300-0103
03031-1300-0104
03031-1300-0105
03031-1300-0112
03031-1300-0113
03031-1300-0114
03031-1300-0115
03151-9259-0005
03151-9259-0002
03151-9259-0003
03151-9259-0004
03151-9268-0012
03151-9268-0013
03151-9268-0014
03151-9268-0112
03151-9268-0113
03151-9268-0114
03151-9040-0001
03151-9041-0001
03151-9042-0001
03151-9042-0002
03151-9043-0001
03151-9043-0002
03151-9250-0001
03151-9103-0001
03151-9103-0002
71
参考数据
参考手册
00809-0106-4804, DA 版
安装支架
用于共平面法兰的安装支架
B4 支架,不锈钢, 2 英寸管道安装,不锈钢螺栓
用于直连式传感器模块的安装支架
B4 支架,不锈钢, 2 英寸管道安装,不锈钢螺栓
安装支架
用于传统法兰的安装支架
B1 支架, 2 英寸管道安装,碳钢螺栓
B2 支架,面板安装,碳钢螺栓
B3 扁平支架,用于 2 英寸管道安装,碳钢螺栓
B7 (B1 型支架加不锈钢螺栓)
B8 (B2 型支架加不锈钢螺栓)
B9 (B3 型支架加不锈钢螺栓)
BA (不锈钢 B1 型支架加不锈钢螺栓)
BC (不锈钢 B3 型支架加不锈钢螺栓)
成套螺栓
共平面法兰螺栓套件 (44 毫米 [1.75 英寸])
碳钢 (每套 4 个)
316 不锈钢 (每套 4 个)
ANSI/ASTM-A-193-B7M (每套 4 个)
合金 K-500 (每套 4 个)
共平面法兰/适配器螺栓套件 (73 毫米 [2.88 英寸])
碳钢 (每套 4 个)
316 不锈钢 (每套 4 个)
ANSI/ASTM-A-193-B7M (每套 4 个)
合金 K-500 (每套 4 个)
阀组/共平面法兰螺栓套件 (57 毫米 [2.25 英寸])
碳钢 (每套 4 个)
316 不锈钢 (每套 4 个)
ANSI/ASTM-A-193-B7M (每套 4 个)
合金 K-500 (每套 4 个)
传统法兰和适配器螺栓套件
碳钢 (每套 6 个)
316 不锈钢 (每套 6 个)
ANSI/ASTM-A-193-B7M (每套 6 个)
合金 K-500 (每套 6 个)
阀组和传统法兰
使用随阀组提供的螺栓
竖直安装液位法兰螺栓套件
碳钢 (每套 4 个)
316 不锈钢 (每套 4 个)
ERS 通讯电缆
7.62 米(25 英尺)的电子远程传感器电缆 (灰色)
15.2 米(50 英尺)的电子远程传感器电缆 (灰色)
30.5 米(100 英尺)的电子远程传感器电缆 (灰色)
参考数据
2018 年 10 月
03151-9270-0001
03151-9270-0002
03151-9272-0001
03151-9272-0002
03151-9272-0003
03151-9272-0007
03151-9272-0008
03151-9272-0009
03151-9272-0011
03151-9272-0013
03151-9280-0001
03151-9280-0002
03151-9280-0003
03151-9280-0004
03151-9281-0001
03151-9281-0002
03151-9281-0003
03151-9281-0004
03151-9282-0001
03151-9282-0002
03151-9282-0003
03151-9282-0004
03151-9283-1001
03151-9283-1002
03151-9283-1003
03151-9283-1004
03151-9285-0001
03151-9285-0002
03151-9101-0025
03151-9101-0050
03151-9101-0100
参考数据
72

参考数据
2018 年 10 月
参考手册
00809-0106-4804, DA 版
45.72 米(150 英尺)的电子远程传感器电缆 (灰色)
60.96 米(200 英尺)的电子远程传感器电缆 (灰色)
68.58 米(225 英尺)的电子远程传感器电缆 (灰色)
91.44 米(300 英尺)的电子远程传感器电缆 (灰色)
121.92 米(400 英尺)的电子远程传感器电缆 (灰色)
152.4 米(500 英尺)的电子远程传感器电缆 (灰色)
7.62 米(25 英尺)的电子远程传感器电缆 (蓝色)
15.2 米(50 英尺)的电子远程传感器电缆 (蓝色)
30.5 米(100 英尺)的电子远程传感器电缆 (蓝色)
45.7 米(150 英尺)的电子远程传感器电缆 (蓝色)
60.96 米(200 英尺)的电子远程传感器电缆 (蓝色)
68.58 米(225 英尺)的电子远程传感器电缆 (蓝色)
7.62 米(25 英尺)的电子远程传感器铠装电缆
15.2 米(50 英尺)的电子远程传感器铠装电缆
22.8 米(75 英尺)的电子远程传感器铠装电缆
30.5 米(100 英尺)的电子远程传感器铠装电缆
38.1 米(125 英尺)的电子远程传感器铠装电缆
03151-9101-0150
03151-9101-0200
03151-9101-0225
03151-9101-0300
03151-9101-0400
03151-9101-0500
03151-9101-1025
03151-9101-1050
03151-9101-1100
03151-9101-1150
03151-9101-1200
03151-9102-1225
03151-9102-0025
03151-9102-0050
03151-9102-0075
03151-9102-0100
03151-9102-0125
73
参考数据

参考手册
00809-0106-4804, DA 版
参考数据
2018 年 10 月
参考数据
74


艾默生过程控制有限公司
参考手册
00809-0106-4804, DA 版
2018 年 10 月
上海办事处
上海市浦东金桥出口
加工区新金桥路 1277 号
电话:021 — 2892 9000
传真:021 — 2892 9001
邮编:201206
北京办事处
北京市朝阳区雅宝路 10 号
凯威大厦 7 层
电话:010 — 8572 6666
传真:010 — 8572 6888
邮编:100020
广州分公司
广州市东风中路 410 - 412 号
时代地产中心 2107 室
电话:020 — 2883 8900
传真:020 — 2883 8901
邮编:510030
深圳分公司
深圳市南山区学苑大道 1001 号
南山智园 C1 栋 18 楼
电话:0755 — 3667 7668
传真:0755 — 2780 7960
邮编:518055
南京分公司
江苏省南京江宁区兴民路 111 号
电话:025 — 6608 3220
传真:025 — 6608 3230
邮编:210019
© 2018 罗斯蒙特有限公司。保留所有权利。所有标识均为其所有者的财产。
Emerson 徽标为艾默生电气公司的商标和服务标志。
Rosemou nt 和 Rosemou nt 标识均为罗斯蒙特有限公司的注册商标。
欲了解更多罗斯蒙特测量解决方案,敬请登陆:www.rosemount.com.cn
进行查询。
咨询邮箱:RMT.China@emerson.com
客服热线:400-820-1996
西安分公司
西安市高新区锦业一路 34 号
西安软件园研发大厦 9 层
电话:029 — 8865 0888
传真:029 — 8865 0899
邮编:710065
济南分公司
济南市历下区泉城路 17 号
华能大厦 9 层 8907 室
电话:0531 — 8209 7188
传真:0531 — 8209 7199
邮编:250011
乌鲁木齐分公司
新疆乌鲁木齐市新华北路 165
号中信银行大厦 36 层 R 座
电话:0991 — 5802 277
传真:0991 — 5803 377
邮编:830000
成都分公司
成都市科华北路 62 号
力宝大厦 S-10-10
电话:028
传真:028 — 6235 0199
邮编:610041
— 6235 0188
艾默生 (北京)仪表有限公司
北京市大兴区前高米店盛坊路
南侧 2 号
电话:010 — 5865 2638
传真:010 — 6420 0619
邮编:102600
 Loading...
Loading...