

RORZE RC-400 User Manual
RORZE CORPORATION
INDEX
About the Masternet control system
Lineup
Controller, driver & stepping motor system configuration
Controllers RC-400 series
RC-410 RC-420 RC-400
Option connectors for wiring
Controllers RC-200 series
RC-204A RC-207A RC-234
RC-002 RC-003 RC-004
Option connectors for wiring
Stepping Motor Drivers RD series
Selection table
2-PH Stepping Motor Drivers
Pulse Input Drivers RD-022A/022NA RD-023A/023NA RD-021M8
RD-023MS RD-023MSH RD-026MSA
RD-023MB RD-026MB
Drivers with built-in RD-122A RD-123A/126A
pulse oscillator RD-323A/326A RD-323MS
RD-323M10(M50)HA/RD-326M10(M50)A
5-PH Stepping Motor Drivers
Pulse Input Drivers RD-053A/053NA RD-053MS RD-A051
Drivers with built-in
pulse oscillator RD-153A RD-353A
Stepping Motors RM series
Motor Specifications
2-PH Stepping Motors
RM2C5648-30S/D RM2C5675-60S/D
RM2414S/D RM2424S/D
RM2621S/D RM2640S/D
RM2690S/D RM26A3S/D
RM29A3S/D RM29B2S/D
5-PH Stepping Motors
RM5407SM/DM RM5411SM/DM
RM5414SM/DM RM5623S/D
RM5640S/D RM5685S/D
RM59A2S/D RM59B2S/D
RM59D0S/D
Recommended Damper
Productions to be discontinued
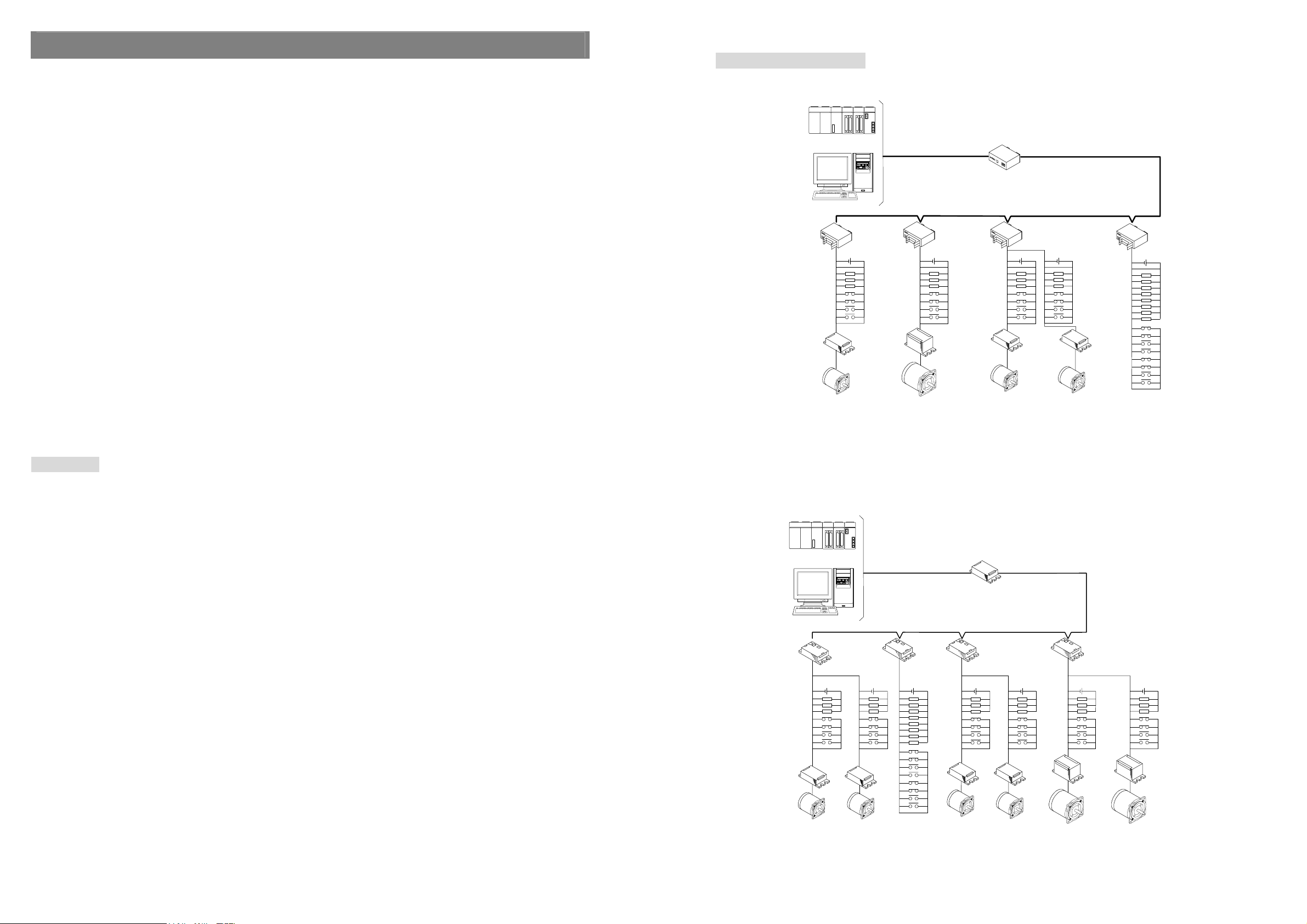
Masternet Control System
Masternet control s ystem is a system to make a control s ystem for central or remote control via a main controller
such as personal computer with RS-232C, etc.
System Configuration
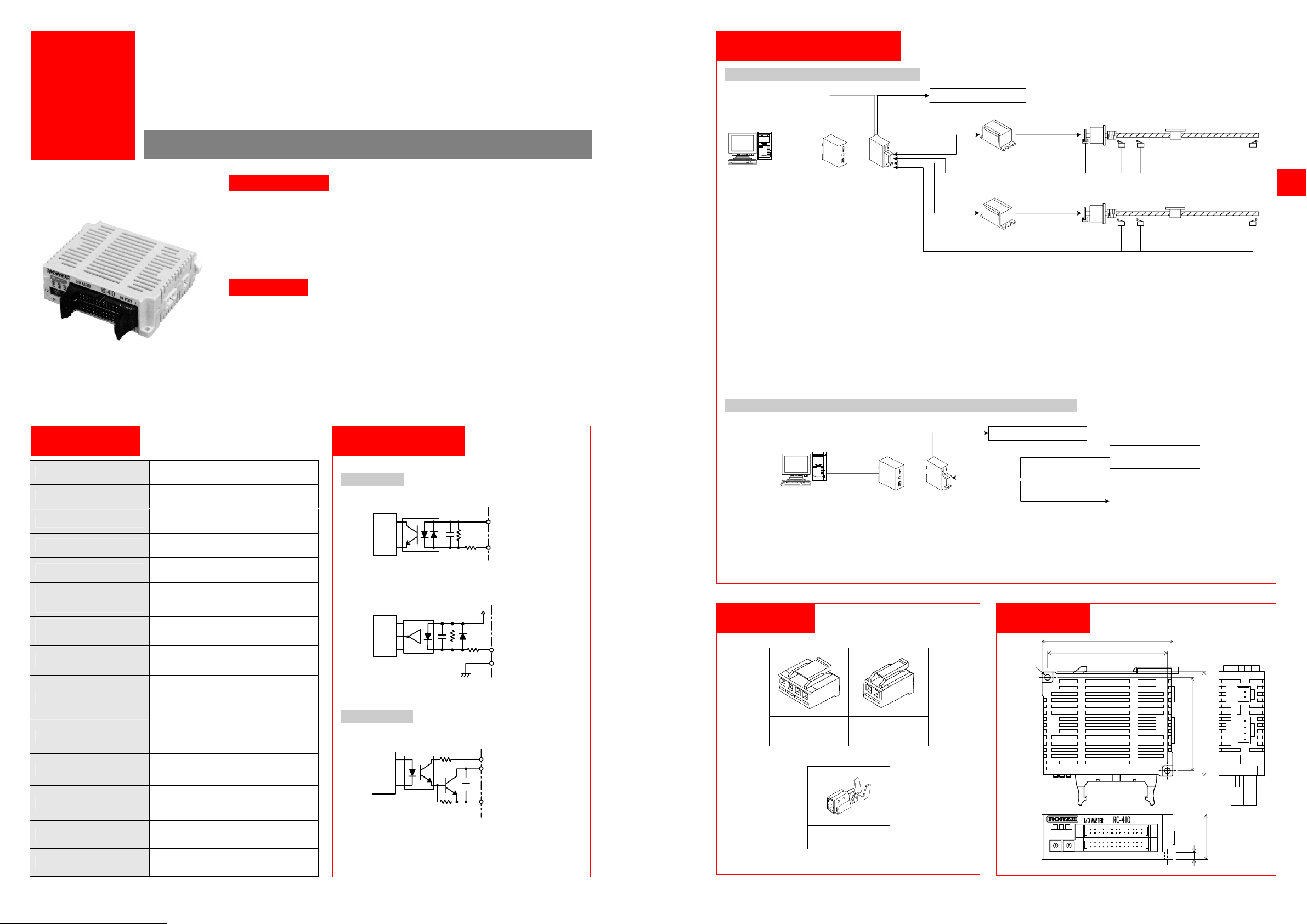
■The configlation whitch used RC-400 series
Because the system runs as a fully-distributed control system and each unit is light and compact, it can be
mounted near motors and sensors. Additionally, the number of wiring is much less because only two cables
(power and signal) are required.
These features allow you to:
(1) Start-up the system quickly.
(2) Reduce wire disconnection problems.
(3) Save time in exchanging modules in the case of a problem.
Individual subsystems are formed by the following four product lines.
1. Current Adapter, the Link Master RC-002 and RC-400 which provides th e communication between PC and
controllers.
2. Controllers with genera l I/O ports such as RC-204A, RC-207A, RC-234, R C-410 and RC-420 which can be
controlled by the communicatio n.
3. Compact stepping motor drivers (RD series) which can be mounted right near motors.
4. 2-ph/5-ph stepping motors (RM series) which are optimized to the specification of RORZE driver.
Features
・Because each controller is originally controlled by the commands received by the communication, the easy
program from PC can provide the high level control.
PLC
RS-232C
(115.2kbps max.)
LinkMaster
RC-400
PC
Generate Master
RC-420
2-ph Driver
RD-023MS
Motor
Generate Master
RC-420
2-ph Driver
RD-026MSA
Motor
・Polling is unnecessary
Link Master RC-400 m onitoring each controller by high speed RS-485 (921.6kbps max.) lightens the
burden imposed on th e host PC. (Automatic pollin g function) Also, comm unication speed between a
host PC and a RC-400 has become about 10 times faster than before. (115.2kbps max.)
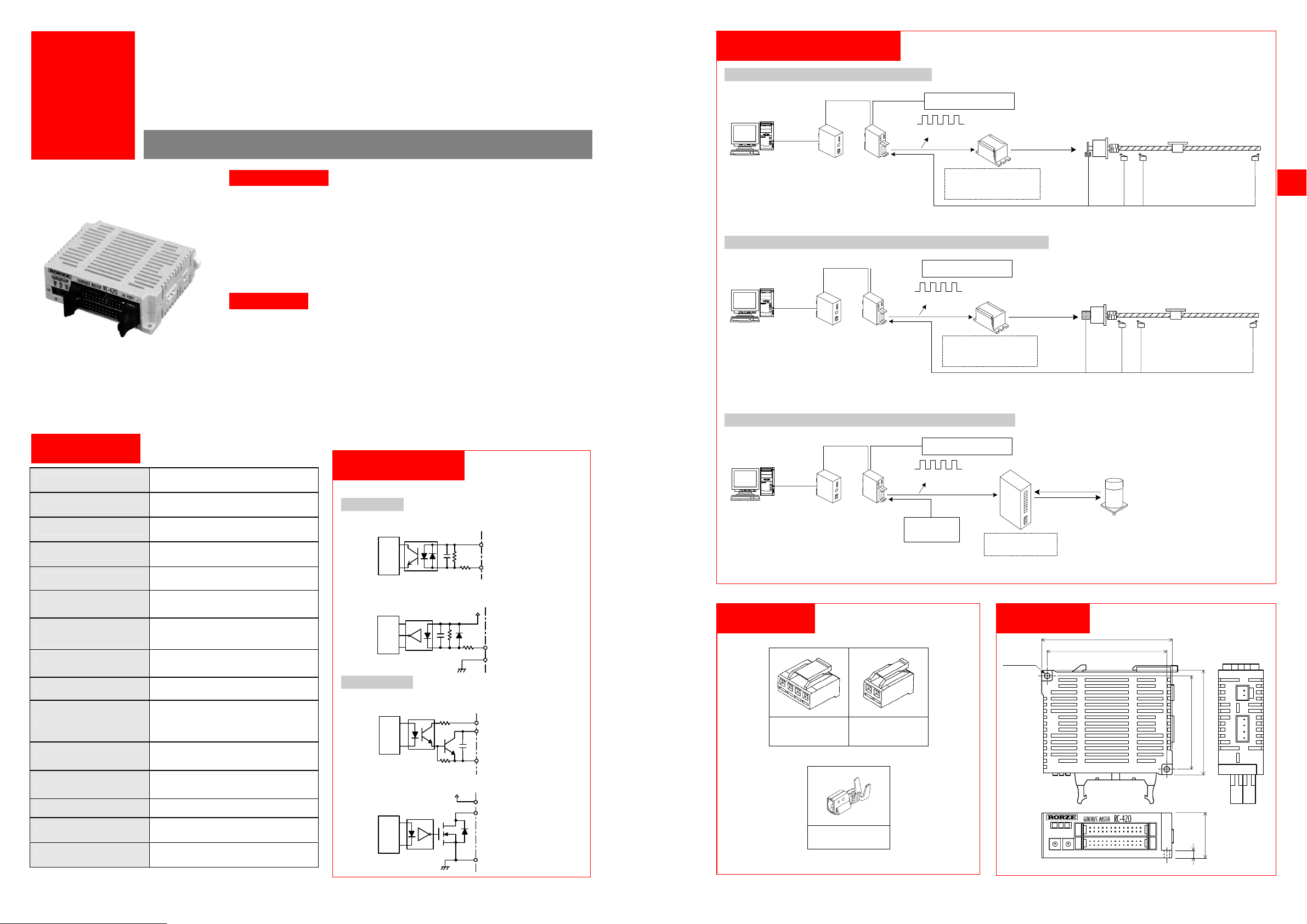
■The configlation whitch used RC-200 series
I/O Master
RC-410
2-ph Driver
RD-323MS
Motor
RS-485
(921.6kbps max.)
2-ph Driver
RD-323MS
Motor
I/O Master
RC-410
・Operation software can be written in any high level language which can control RS-232C communication.
・Compact steel casings and simple wiring will make the system compact and provide free configurations.
・Because easy unit operates with DC power supply, it can built into autonomy robots.
・Modular systems make the time for development of devices shorter and the system easy to diagnose and repair.
・Can make a network system with one Link Master a nd two (RC-40 0 series) or t hree (RC-20 0 series ) cables and
subsystems can be control led from a control station up to 1.2 km (※1) away. R C-400 series can control up to
120 controllers and RC-200 series can control up to 20 controllers.
※1 In RC-200 series, the dis tance which can b e com municated var ies depend ing on the num ber of connected
controllers or the communication speed etc.
PLC
PC
2-ph Driver
RD-023MS
Motor
Generate Master
RC-234
2-ph Driver
RD-023MS
Motor
RS-232C
(9600bps)
I/O Master
RC-207A
Link Master
RC-002
I/O Master
RC-207A
2-ph Driver
RD-323MS
Motor
Current loop
(9600bps)
2-ph Driver
RD-323MS
Motor
I/O Master
RC-204A
5-ph Driver
RD-353A
Motor
5-ph Driver
RD-353A
Motor
2 3
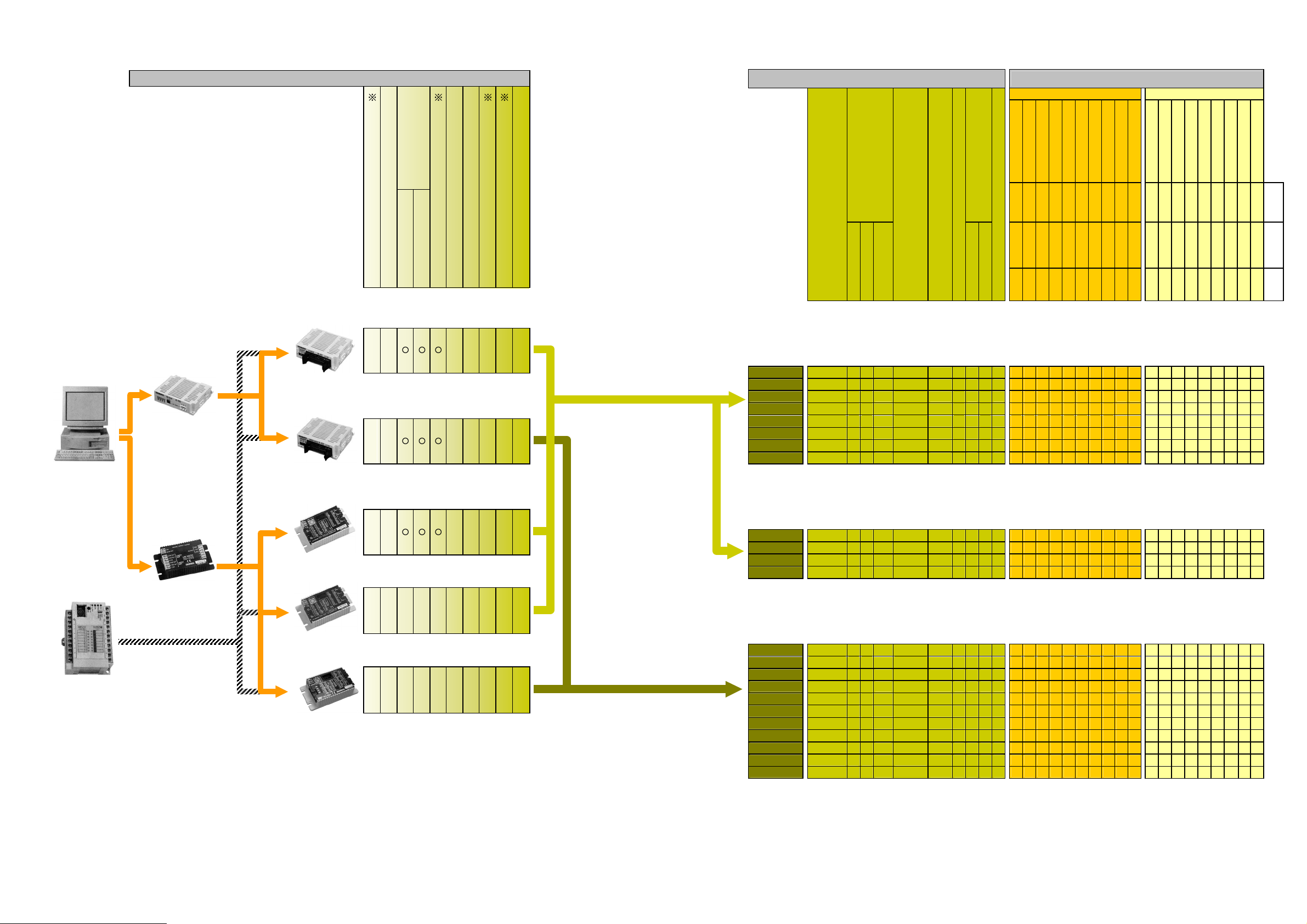
Controller, driver & stepping motor system configuration
Controllers RM seies
※
2 Control Motors (max)
No. of Profiles
Method
※
3 Stall Detection Function
Pulse Movement
User Program Memory C apacity
Maximum Pulse Rate (pps)
※
4 Input Ports ※4 Output Ports
Outside Dimensions
Drivers RD series
Motor Current (A/ph)
Excitation Method
Supply Voltage (VDC)
Stepping Motors RM series
Maximum Pulse R ate (max) (pps)
Speed Change Funct ion
Grow Out Terminal
Outside Dimensions
2-ph Stepping Motors
RM2C5648-30S/D
RM2C5675-60S/D
RM2414S/ D
RM2424S/ D
RM2621S/ D
RM2640S/ D
RM2690S/ D
RM26A3S/D
RM29A3S/D
5-ph Stepping Motors
RM29B2S/D
RM5407SM/DM
RM5411SM/DM
RM5414SM/DM
RM5323S/ D
RM5640S/ D
RM5685S/ D
RM59A2S/D
RM59B2S/D
RM59D0S/D
PC
PC
RC-400
Link Master
Dimensions: E
RC-002
Link Master
Dimensions: B
I/O
PLC
※1
※1 In case of controlling RC-207A, RC-234, RC-410 or RC-420 using PLC,
some program s downloaded via PC in advance are selected and started
by PLC.
※2
RC-410 and RC-234 can control two motors simultaneously.
RC-204A and RC-207A ca n cont rol two motors alternately. It’s impossible
for them to work two m otors together at the same time.
※3
The controllers with a stall detection function can detect stalls by
attaching a stall slit (ON-OFF cycle is fixed) and a stall sensor to moving
part. RC-420 and RC-234 can d etect a stall by encoder as well.
※4
The number of I/O port varies depending on the number and kind of m otor.
RC-410
RC-420
RC-204A
RC-207A
RC-234
Absolute
Incremental
(No. of command)
RC-410 I/O Master
2048
2048
1130
1130
1000
○ ○ ○
○ ○ ○
○ ○ ○
○
○
○
○
2
RC-420 Generate Master
1
RC-204A I/O Master
2
RC-207A I/O Master
2
RC-234 Generate Master
2
approx.
2000
200k
2000
300
○
1500
○
16
approx.
1M
16
100k
20
approx.
100k
20
approx.
1M
10
Outside Dimensions
A .....32(H)×50(W)×80(D)mm
B .....27.5(H)×105(W)×56(D)mm
C.....63(H)×56(W)×105(D)mm
D.....84(H)×40(W)×155(D)mm
E .....25(H)×86(W)×69(D)mm
F .....29.5(H)×86(W)×69(D)mm
G.....22.6(H)×105(W)×65.6(D)mm
16
10
16
16
10
Full Step
Half Step
Microstep
Resolution (max)
Digital
0.47
1.03
0.14
0.24
0.21
0.39
0.78
1.3
1.3
2.2
0.074
0.11
0.14
0.23
0.39
0.83
1.23
2.2
Analog
3.75
3.75
1.8
1.8
1.8
1.8
1.8
1.8
3.0
6.0
1.5
1.5
3.0
3.0
3.0
3.0
0.36
0.36
0.36
0.72
0.72
0.72
0.72
1.8
1.8
6.0
6.0
1.5
1.5
1.5
3.0
3.0
0.72
3.0
3.0
3.0
3.9
0.72
3.0
Holding Torque
(N・m)
Step Angle
(Degree)
Rated Current
(A/ph)
F
Drivers with built-in pulse oscillator
RD-3** Series
RD-323A 0.5~3 ○ ○ 18~40 18k ○ ○ C ○ ○ ○ ○ ○ ○
RD-326A 1~6 ○ ○ 18~40 18k ○ ○ C ○ ○
RD-323MS 0.3~3 ○ ○ 80 18~40 700k ○ ○ B ○ ○ ○ ○ ○ ○
RD-323M10HA
RD-323M50HA
F
RD-326M10A
RD-326M50A
RD-353A 0.5~3 ○ ○ 18~40 70k ○ ○ C ○ ○ ○ ○ ○ ○ ○ ○ ○
0.5~3 10 18~80 160k ○ ○ C ○ ○ ○ ○ ○ ○ ○
0.5~3 50 18~80 600k ○ ○ C ○ ○ ○ ○ ○ ○ ○
1~6 10 18~40 160k ○ ○ C ○ ○ ○
1~6 50 18~40 600k ○ ○ C ○ ○ ○
Drivers with built-in pulse oscillator
B
RD-1** Series
RD-122A 0.3~1.3 ○ ○ 18~40 14k ○ B △ △
RD-123A 0.5~3 ○ ○ 18~40 20k ○ C ○ ○ ○ ○ ○ ○
RD-126A 1~6 ○ ○ 18~40 20k ○ C ○ ○
RD-153A 0.5~3 ○ ○ 18~40 55k ○ C ○ ○ ○ ○ ○ ○ ○ ○ ○
B
Pulse Input Drivers
RD-0** Series
RD-022A 0.3~1.3 ○ ○ 18~40 25k B △ △
RD-023A 0.5~3 ○ ○ 18~40 20k C ○ ○ ○ ○ ○ ○
B
RD-021M8 0.1~1.5 ○ ○ 8 10~40 100k A ○ ○
RD-023MS 0.3~3 ○ ○ 400 18~40 500k B ○ ○ ○ ○ ○ ○
RD-023MSH 0.3~3 ○ ○ 400 18~80 500k C ○ ○ ○ ○ ○ ○ ○
RD-026MSA 0.5~6 ○ ○ 400 18~40 500k C ○ ○ ○
RD-023MB 0.1~3 ○ ○ 400 12~50 500k G ○ ○ ○ ○ ○ ○ ○
RD-026MB 0.2~6 ○ ○ 400 18~50 500k G ○ ○ ○
RD-053A 0.5~3 ○ ○ 18~40 200k C ○ ○ ○ ○ ○ ○ ○ ○ ○
RD-053MS 0.5~3 ○ ○ 400 18~40 500k C ○ ○ ○ ○ ○ ○ ○ ○ ○
RD-A051 0.2~1.5 ○ ○
AC100V
200k D ○ ○ ○
4 5
A
Compact
Light
Controllers to Control Stepping Motors and
1
1
1
0
0
0
I/O Ports
C
-
C
C
4
-
4
-
4
R
R
System configurations
Example 1 (Controlling two drivers)
RS-485
RS-485
To the adjacent controller
Stepping motor
I/O MASTER
Description
RC-410 is an I/O controller which has 16 Input ports and 16 Output ports.
This controller can control positioning of stepping motor using Rorze’s
original driver with built-in pulse oscillator.
(S-curve acceleration/deceleration and interpolation control are not
available.)
Features
●16 Input ports and 16 Output ports for general purpose can make system
control easy.
●Can control 2 motors simultaneously.
●Stall detection of stepping motor using a STALL sensor.
●Stand-alone operation and control from PLC is available by
downloading the user program.
●Isolated communication ports, inputs and outputs by photo-coupler
●
Light and compact (120g, 29.5 x 86 x 69mm) and DIN rail installation is available.
Specifications
Supply voltage 18 to 36VDC (including ripple)
Supply current Less than 200mA (at 24VDC)
Clock response 200kpps max.
Data memory position -999,999,999 to +999,999,999
Number of profiles 2,048 (each axis)
Input ports
Output ports
Acceleration/deceleration
method
Stall detection method STALL sensor
Communication method
User program
Recommended drivers
Control motors
Outside dimensions
Weight approx. 120g
16 (Including I/O ports to
16 control motors)
Trapezoidal
RS-485 (921.6kbps max.)
Distance: 1.2km max.
(use Link Master RC-400)
6,039steps
(approx. 2,000commands)
Drivers with built-in oscillator
(RD-100 and 300 series)
2 (Synchronized motion of the
2 axes is available.)
29.5(H)×86(W)×69(D)mm
Input/Output ports
Input port
Sensor, General-purpose Inputs
Internal
circui t
Pulse Inputs
Internal
circuit
5V
Output port
General-purpose Outputs
Internal
circuit
+COM(+24V)
IN
CLK1,CLK2
+COM(+24V)
OUT
50V/150mA
-COM(0V)
PC etc.
RS-232C
RORZE driver with
RC-400 RC-410
・By using a RC-410, two stepping motors c an be controlled simultaneously.
・Stall detection of stepping motors is available by connecting stall detection sens or to RC-410
・When using a RD-100 s eries driver, a low step pulse (pulses in deceleration period) needs to be set up in advance.
A RD-300 series driver has a “GROW OUT” terminal that outputs a signal during acc eleration.
A RD-410 counts the number of pulses while receiving this signal, and automatically calculates a low step pulse to
perform deceleration.
built-in oscillator (No. 1)
RORZE driver with
built-in oscillator (No. 2)
Stall de tectio n
sensor
Stall dete ction
sensor
Example 2 (All of the I/O ports are used as general purpose ports)
To the adjacent controller
ll of the I/O ports (16 points) can be used for any
purpose (in this mode).
Dimensions
PC etc.
Accessories
RS-232C
RS-485
RC-400 RC-410
RS-485
Socket (4 pins)
×1
Socket (2 pins)
×1
2-φ3.6
Contact
×10
ID
RUN
PWR
1
0
0
F
2
F
E
3
E
D
D
4
C
C
5
B
B
6
A
7
A
9
8
9
HL
485
1
2
3
4
5
6
7
8
CCWLS
Stepping motor
CCWLS
86
79
ORG(HOME)LS
ORG(HOME)LS
General Input D0-15
General Output D0-15
IN POR T 1
OUT PORT
62
5
69
29.5
POWER
RS-485
CWLS
RC-410
CWLS
(mm)
+ -
+ - + -
6 7
Compact
Mode Selections
Motion Controller
Light
Specifications
Supply voltage 18 to 36VDC (including ripple)
Supply current Less than 200mA (at 24VDC)
Pulse rate 1pps to 1Mpps
Data memory position -999,999,999 to +999,999,999
Number of profiles 2,048
Input ports
Output ports
Acceleration/deceleration
Interpolation function
Stall detection method Encoder or STALL sensor
Communication method
User program
Recommended drivers
Control motor 1
Outside dimensions
Weight approx. 120g
8 9
method
with Multi-axis Interpolation Control
C
-
4
2
0
R
C
-
C
4
-
4
R
Generate Master
10
16
Arbitrary S-curve, Trapezoidal
2-axis circular / linear
interpolation in a SCARA robot
RS-485 (921.6kbps max.)
Distance: 1.2km max.
(use Link Master RC-400)
6,039steps
(approx. 2,000commands)
Pulse Input Drivers
(RD-0 series)
29.5(H)×86(W)×69(D)mm
2
0
2
0
Description
RC-420 is a motion controller which can control stepping motor and servo
motor by pulse input.
Thanks to the high-speed CPU, various acceleration/deceleration patterns
of pulse generation are available by utilizing software.
Also, using with RC-400 allows synchronized motion by plural controllers.
Combining these functions provides you a multi-axis interpolation control
by plural RC-420s.
Features
●Circular and linear interpolation control in a SCARA robot are available
by using plural RC-420s.
●Can combine S-curve acceleration/deceleration having various
parameters flexibly
Closed loop control when used with an encoder for accurate positioning.
●
●Stand-alone operation and control from PLC are available by
downloading the user program.
●Isolated communication ports, inputs and outputs by photo-coupler
Light and compact (120g, 29.5 x 86 x 69mm) and DIN rail installation is available.
●
Input/Output ports
Input port
Sensor, General-purpose Inputs
Internal
Output port
circu it
Encoder Inputs
Internal
circuit
General-purpose Outputs
Internal
circuit
Pulse Outputs
5V
Internal
circuit
+COM(+24V)
IN
5V
EA,EB
+COM(+24V)
OUT
-COM(0V)
5V OUT
OUT
50V/100mA
GND
50V/150mA
1. Controlling a stepping motor driver
To the adjacent RC-4xx
series controller
MAX 1Mpps
RORZE RD-0 series driver
or other-company stepping
motor driver
PC etc.
RS-485
RS-232C
RC-400 RC-420
Stall detection of stepping motors is available by c onnecting stall detection sensor to RC-420.
RS-485
2. Controlling a stepping motor driver with an encoder input
To the adjacent RC-4xx
series controller
MAX 1Mpps
RORZE RD-0 series d river
or other-company stepping
motor driver
PC etc.
RS-485
RS-232C
RC-400 RC-420
Mode to control a stepping motor on the basis of the pulse put out from an incremental type enc oder.
This mode is eff ective when accurate positioning is required.
RS-485
3. Controlling a servo motor driver using a pulse train
To the adjacent RC-4xx
series controller
MAX 1Mpps
Input signals
& limit switches
a servo motor driver
using a pulse train
Dimensions
Accessories
PC etc.
RS-485
RS-232C
RC-400 RC-420
Mode to control a servo motor by connecting with a puls e input servo motor driver.
RS-485
Socket (4 pins)
×1
Socket (2 pins)
×1
2-φ3.6
Contact
×10
ID
Stepping motor
Stall detec tion
sensor
Stepping motor
Encoder
RUN
PWR
485
0
1
0
1
2
F
2
F
3
E
3
E
D
D
4
4
C
C
5
5
B
B
6
6
7
A
7
A
8
9
8
9
HL
CCWLS
CCWLS
Servo motor
86
79
ORG(HOME)LS
ORG(HOME)LS
IN POR T 1
OUT PORT
62
5
69
29.5
CWLS
CWLS
(mm)
+ -
POWER
RS-485
+ - + -
RC-420
s
s
Acceleration/Deceleration pattern
Compact
Accel/decel pattern in RC-420
S-curve accel/decel
Acceleration pattern (①) and deceleration
pattern (②) can set separately.
①
②
①
②
f (speed)
t (time)
Position configuration allows for
multiple speed changes in one move.
Can configure more complex paths by combining circular
Multi-axis interpolation control
and linear interpolation by XY coordinate system in 2 or 3-axi
SCARA robot
wafer casette
wafer casette
wafer
wafer
The example in 2-axis SCARA robot
Sample of user program
Address Command Description (No. in the flowchart below)
0 COS H 0 Turns off all of the general output ports. (①)
1 00 M Performs a home search. (②)
2 JON MT,+0 Repeats address 2 if motor is moving.
3 SET OD0 Turns on general output D0.
4 JOF ID0,+0 Repeats address 4 if general input D0 is off.
5 RST OD0 Turns off general output D0. (⑥)
6 1AM1,25000
7 JOF MT,+3
8 JOF ID6,+4
9 JMP -2 Jumps to the 2nd previous address (i.e. address 7). (⑩)
10 SET OD1 Turns on general output D1. This informs an external circuit that a
11 END Exits the user program. (The next address is not executed.) (⑫)
12 5IS Stops the motor immediately. (⑬)
13 SET OD2 Turns on general output D2.
14 END Exits the user program . (⑮)
Proceeds to the next command after the home search is completed. (③)
This informs an external circuit that a home search is finished. (④)
Proceeds to the ne xt command when the p ort is turned on (1). (⑤)
Starts to run motor at a high speed toward the position of 25,000 pulses. (⑦)
Jumps to the 3rd next address (i.e. addre ss 10) if the mot or is stoppe d. (⑧)
Jumps to address 12 if general input D6 is off (while the motor is running). (⑨)
move is finished. (⑪)
This informs an external circuit that the move is aborted. (⑭)
①
②
NO
③
④
NO
⑤
Flowchart (Sample user program #1)
START
Turns off all of the
general output ports
Starts a home search
Home search finished?
YES
Turns on output D0
Input D0 Off?
YES
Constant-speed
⑥
⑦
NO
Input D6 Off?
⑨,⑩
YES
Immediately stop the
⑬
motor
Turns on output D2
⑭
Turns off output D0
Moves to the position of
25,000 pulses
NO
Move finished?
⑧
⑪
Turns on output D1
⑫,⑮
YES
END
Light
Communication Adapter
C
-
4
0
0
R
R
C
C
-
4
-
4
0
0
0
0
LINK MASTER
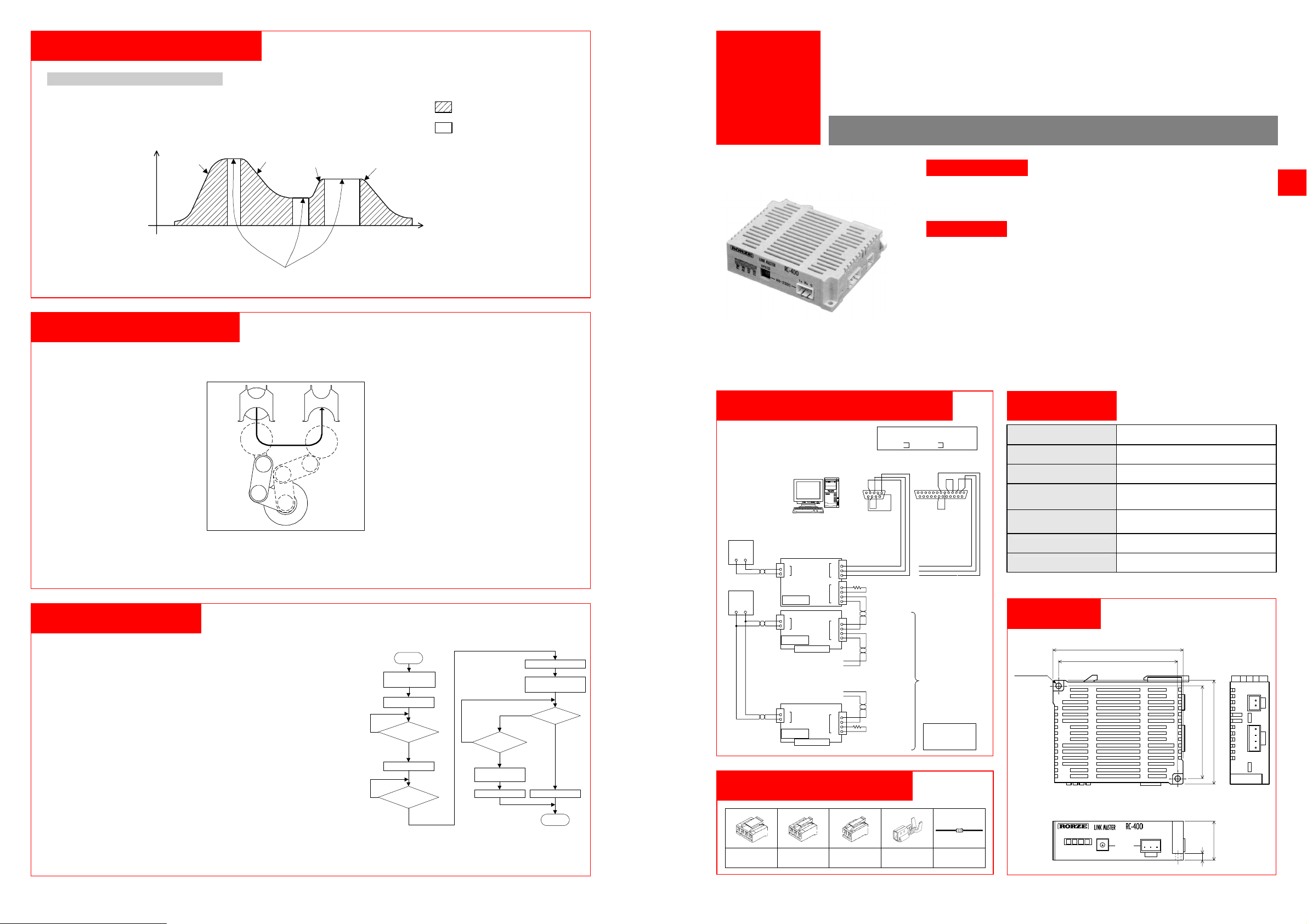
Description
RC-400 controls a communication among a host, RC-410s and RC-420s.
Also, a multi-axis interpolation control is available by using with RC-420.
Features
●Monitoring each controller all the time lightens the burden imposed
on a host PC. (Automatic polling function)
●High speed communication
between host PC and RC-400: Up to 115.2kbps
between controllers: Up to 921.6kbps
●Can control up to 120 RC-4xx series controllers by a RC-400.
●Communication distance is extensible up to 1.2km.
●Light and compact (90g, 25 x 86 x 69mm) and DIN rail installation i
available.
Wiring a power and communication line
The follo wing pins must b e connec te d
to commun icate succes sfully.
RTS
Short
CTS
IBM PC/AT comp atible
9 pin D-Su b (female)
RXD
15
DSR
PC
DC
18-36V
-+
DC
18-36V
-+
Accessories
Twisted
Twisted
2
1
2
1
2
1
+
POWER
-
RC-400
+
POWER
-
RC-4xx
+
POWER
-
RC-4xx
RS-232C
I/O port s
・
・
・
・
・
I/O ports
RS-485
RS-485
RS-485
3
Tx
2
Rx
1
G
4
+
3
-
2
+
1
-
4
+
3
-
2
+
1
-
4
+
3
-
2
+
1
-
Socket (4 pins)
×1
Socket (3 pins)
×1
Socket (2 pins)
×1
RS-232C port on a PC
SG
TXD
96
DTR
RTS
CTS
Carbon film resisto r
100Ω(1/4W)
(※1)
Shielded and
Twisted wir e pair
Shielded and
Twisted wire pair
Carbon film resistor
100Ω(1/4W)
(※1)
Contact
×14
DSR
Short
DTR
NEC PC-98xx co mpatible
25 Pin D-Sub (male)
RTS
CTS
SG
13
25 14
DTR
DSR
To TX on RC-400
To RX on RC-400
To G on R C-400
Connectab le to up to 120
RC-4xx ser ies controllers
(※1)
Please co nnect 100Ω
resistor t o the end of
the RS-48 5 line.
Resistor
×3
TXD
RXD
1
Specifications
Supply voltage 18 to 36VDC (including ripple)
Supply current 100mA (at 24VDC)
Communication with PC
Communication with
RC-400 series
Max. connected devices
Outside dimensions
Weight approx. 90g
Dimensions
2-φ3.6
RUN
PWR
485
RS-232C (115.2kbps max.)
RS-485 (921.6kbps max.)
Distance: 1.2km max.
120 units
25(H)×86(W)×69(D)mm
(mm)
86
79
+ -
POWER
69
62
SPEED
8
9
7
A
6
B
5
C
4
D
3
E
2
F
0
1
232C
Tx Rx G
RS-232C
5
25
RS-485
+ - + -
RC-420 / RC-400
10 11
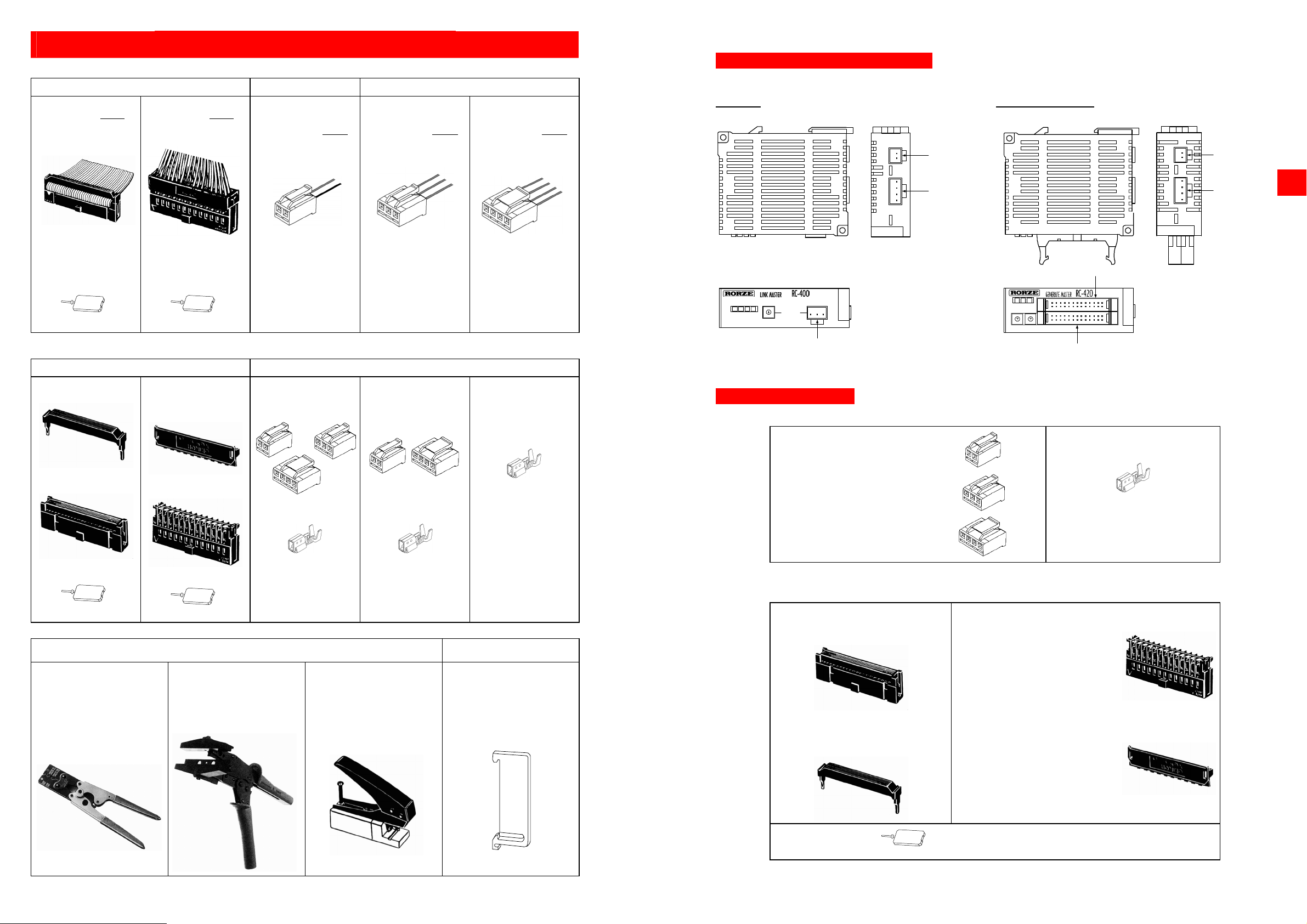
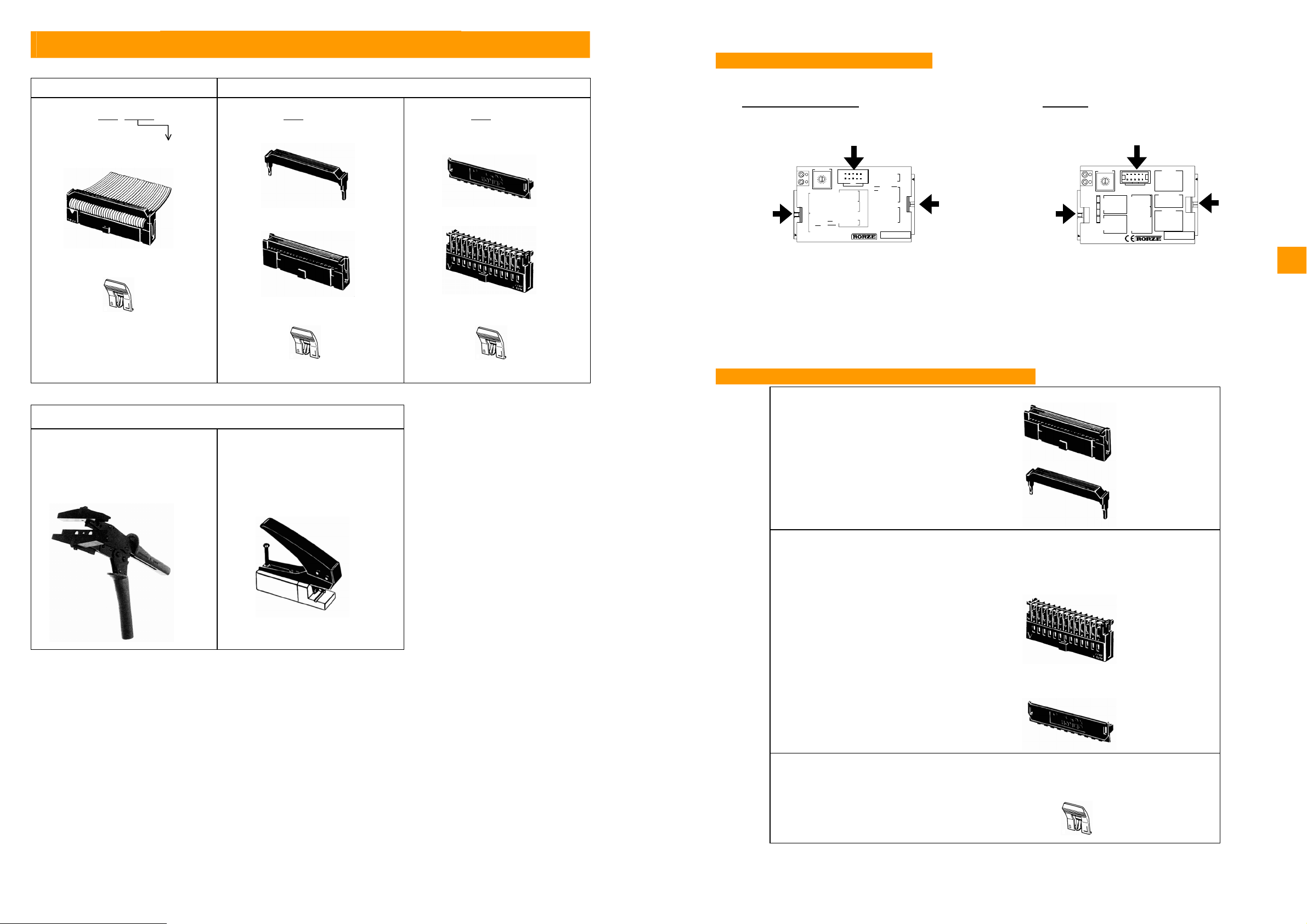
Option connectors for wiring
■ I/O Cables
Socket with flat cable
Model:RCC-26P
Length (cm):50, 100, 200, 300
Flat cable (26 conductors)
with a single-sided socket
×1
Coding pin ×1
※The coding pin is used to pr event confusion when many connectors with the s ame number of contacts are lined up.
□□□LC
↓
Socket with discrete wires
Model:RCB-26P
Length (cm):50, 100, 200, 300
Discrete wire (AWG#24,
BLUE, 26 pcs.) with a singlesided socket
Coding pin ×1
□□□LC
↓
×1
■ Connectors ■ Repair parts
Socket for flat cable
Model:RCF-26PC
Strain relief ×1
Socket ×1
Coding pin ×1
Socket for discrete
wires (for AWG#24)
Model:RCR-26PC
Semi cover ×2
Socket ×1
Coding pin ×1
■ Tools
Hand Crimper for MOLEX
connectors
Model:TOOL-57189-5000
Necessary when connecting
MOLEX sockets with discretewires.
Hand Crimper for
flat-cable connectors
Model:TOOL-901500
Necessary when connecting
sockets with flat-c able.
■
Power Supply Cable
Socket with discrete wires
(for Power Supply)
Model:RCM-2P
Length (cm):50, 100, 200, 300
Discrete wire (AWG#20,
BLACK, ORANGE, each 1 pc.)
with a single-sided
socket (2 pins)
Accessories
for RC-400
Model:RC4-ACC1
MOLEX socket (2・3・4 pins)
each 1 pc.
Contact ×14
Carbon film resistor
100Ω(1/4W ) ×3
■ Communication Cables
Socket with discrete wires
(for RS-232C)
□□□L
Model:RCM-3P
↓
Length (cm):50, 100, 200, 300
Discrete wire (AWG#24,
BLUE, 3 pcs.) with a single-
MOLEX
×1
sided
×1
MOLEX
socket (3 pins)
Accessories
for RC-410, 420
Model:RC4-ACC2
MOLEX socket (2・4 pins)
each 1 pc.
Contact ×10
Hand Crimper for
discrete-wire connectors
Model:TOOL-XY2B-7006
Necessary when connecting
sockets with discrete-wires.
□□□L
↓
■ Attachment
Spacer for DIN rail
Model:AESC-SA-406B
This is used when RC-4 series
controllers are inst alled on a
DIN rail at intervals of 5mm.
Socket with discrete wires
(for RS-485)
Model:RCM-4P
□□□
L
↓
Length (cm):50, 100, 200, 300
Discrete wire (AWG#24,
BLUE, 4 pcs.) with a singlesided
MOLEX
socket (4 pins)
×1
Contact for MOLEX
socket
Model:RC4-ACC3
Contact ×50
Sockets used for each controller
RC-400 RC-410, RC-420
+ -
POWER
①POWER (2P)
RS-485
+ - + -
③RS-485 (4P)
SPEED
8
9
7
A
6
B
5
C
4
D
3
E
2
F
0
1
RUN
PWR
485
232C
Tx Rx G
RS-232C
②RS-232C (3P)
ID
RUN
PWR
0
0
1
F
2
F
E
3
E
D
D
4
C
C
5
B
B
6
A
7
A
9
8
9
HL
485
1
2
3
4
5
6
7
8
④INPUT PORT (26P)
⑤OUTPUT PORT (26P)
Suitable connectors
①,②,③ (Manufactured by MOLEX)
Sockets
①: 51067-0200 (for 2P)
Contact
50217-8100
②: 51067-0300 (for 3P)
③: 51067-0400 (for 4P)
④,⑤ (Manufactured by OMRON)
For Flat cable
Socket
XG4M-2630 (for 26P)
Strain relief
XG4T-2604 (for 26P)
For Discrete wire
Sockets
for AWG#28 to 26
XG5M-2635 (for 26P)
for AWG#24
XG5M-2632 (for 26P)
Semicover
XG5S-1301 (for 26P)
IN PORT 1
OUT PO RT
+ -
POWER
RS-485
+ - + -
①POWER (2P)
③RS-485 (4P)
Option connectors
Coding pin
XG4Z-0005
12 13
y
r
Compact
Low cost
Controllers to Control Stepping Motors and
I/O Ports
C
-
2
0
4
A
,
R
C
-
2
0
7
A
R
C
-
2
0
R
C
-
2
0
4
I/O MASTER
A
,
R
C
-
2
4
A
,
R
C
0
-
2
0
Description
I/O Master RC-204A and RC-207A utilize serial communication
(RS-232C) to control step motor drivers and I/O ports. Also, because a
pulse counter is built in, trapezoidal acceleration is available b
combining with RORZE’s drivers with built-in pulse oscillator.
Features
●In case of controlling no motor, all I/O ports can be used as general
I/O ports.
●Stall detection by attaching a stall sensor and a stall slit to a device.
(Note: Stall sensor devices may not be rotary in shape.)
●Up to 20 controllers such as RC-204A, RC-207A and RC-234 can be
daisy-chained together in a MasterNet system from one PC and
multi-axis stand-alone control is available at a low price. (See the
example 2 in the system configuration.)
●RC-207A:
●RC-204A: Backup using battery (3.6V)
EEPROM for easy downloading and saving the user’s program
7
7
A
A
System configurations
Example 1
RS-232C
PC
Stall detection is possible,
in case of using two motors.
Example 2
PC
Controllers that can c onnect at this configuration: RC-204A, RC-207A, RC-234, RC-003
Example 3
Link Master
RC-002
Link Master
RC-002
RS-232C
Driver with builtin oscil lator
(RD-3 series)
Stepping motor
I/O Master
RC-204A
RC-207A
Driver with built-in oscillator
(RD-3 series)
Stall detection of stepping mot ors is available by connecting
stall detection sensor to RC-204A, 207A
I/O Master
RC-204A
RC-207A
STALL DETECTION SENSOR
CCWLS ORG (HOME) CWLS
Can control up to 20 controllers
Controller
Driver
I/O Circuits
Stepping motor
or Servo motor
I/O Circuits
RC-204A / RC-207A
Specifications
Supply voltage 18 to 40VDC (including ripple)
Supply current Less than 30mA (at 24VDC)
Clock response
Data memory
position
RC-204A
RC-207A
Number of profiles 1,130
Accel./Decel. method Trapezoidal
Input ports
Output ports
Stall detection method STALL sensor
Control signal line
Communication
speed
RC-204A
RC-207A
Back up method
User program
(RC-207A)
Recommended drivers
Control motors 2 of each, controlled alternately
Outside dimensions
100kpps max.
80kpps (at stall detection)
0 to 16,777,215 pulses
0 to 16,777,215 pulses
or -8,388,608 to +8,388,607
20 (Including I/O ports to
16 control motors)
Current loop method of RS232C
(use Link Master RC-002)
9600 bps
9600, 1200, 300 bps
RC-204A: battery
RC-207A: EEPROM
1,792 bytes
(approx. 300 commands)
Drivers with built-in pulse oscillato
(RD-100 and 300 series)
27.5(H)×105(W)×56(D)mm
Input/Output ports
Input port
5V
IN
2.2kΩ
Low Level : Less than 1.5V
High Level: More than 3.5V
Output port
COM
OUT
GND
Open Collector (Darlington・Transistor
Voltage: Less than 50V
Current: Less than 200mA (per one
contact)
Less than 800mA in total of
8 contacts
Vce(sat): Less than 1.1V (Ic:200mA)
CMOS 74HC
)
PC
Dimensions
RS-232C
Driver with builtin oscill ator
(RD-3 series)
Stepping motor
Link Master
RC-002
No.1 No.2
M4 Scre w
I/O MASTER
RC-204A
RC-207A
CCWLS
ORG
(HOME)
CWLS
No.1
GND
DC18V-40V
20 D7
18 D5
OUT
16 D3
PORT2
14 D1
12 GND
10 D7
8D5
6D3
OUT
4 CCW
PORT1
2 GND
I/O MASTER
CCWLS
ORG
(HOME)
CWLS
For Motor
No.2
BODY NO.
8
9
7
A
6
B
5
C
4
D
3
E
2
F
1
0
19 D6
17 D4
15 D2
13 D0
11 COM
9D6
7D4
5 LOW
3START
1 COM
RC-204A
General I/OFor Motor
1 COM IN
2 TXD IN
3 RXD IN
4 COM OUT
5 TXD OUT
6 RXD OUT
7 RXD END
8 N.C.
CURREN T L OOP
9BAT+
10 BAT -
105
95
Relation between No. of motor and general I/O ports.
No. of motor to control 0 1 2
General input ports 20 16 13
General output ports 16 13 10
(mm)
1D4
2D5
IN
4D7
6 GND
8 ORG
IN
10 D3
12 D5
14 D7
16 GND
18 D1
20 D3
22 D5
24 D7
26 GND
MADE IN JAPAN
PORT1
PORT2
IN
PORT3
30
56
22
27.5
4
3D6
5 GND
7 CCW
9CW
11 D4
13 D6
15 GND
17 D0
19 D2
21 D4
23 D6
3.6V
25 CLOCK
Weight approx. 250g
14 15
Y
g
y
(
g
V
Compact
Low cost
Specifications
Motion Controller
with Two-axis Interpolation Control
C
-
2
3
4
R
C
-
C
2
-
2
R
GENERATE MASTER
3
4
3
4
Description
RC-234 is a motion controller which can control stepping motor and
servo motor by pulse input. This can control 2 motors simultaneously,
and circular and linear interpolation controls are available in the X
plane.
Features
●Compliant with CE Marking.
●
S-curve acceleration provides smooth moves without shock or damping.
●
Closed loop control when used with an encoder for accurate positioning.
●Stand-alone operation and control from PLC are available by
downloading the user program.
●Pulse output frequency up to 1Mpps permits to be used with a high
resolution microstep driver.
●Up to 20 controllers such as RC-204A, RC-207A and RC-234 can be
daisy-chained together in a MasterNet system from one PC and
multi-axis stand-alone control is available at a low price.
Mode Selections
Input/Output ports
You can step up the following modes
arbitrarily to each axis.
1. Controlling stepping motor using stall detection function
If a stall is detected, a stepping motor
stops immediately.
Also, you can override a stall detection
and control a stepping motor as usual.
S
S
E
L
N
I
S
T
O
R
F
O
R
S
T
A
L
L
D
E
T
E
C
T
I
O
N
,
CCWLS
DRIVER
RD-0 SERIES
ORG(HOME)LS
STALL DETECT ION SIGNAL
CWLS
PC
PLC
SWITCH, ET C.
2. Closed loop control of stepping motor using encoder
Mode to control a stepping motor on
the basis of the pulse put out from an
incremental type encoder.
This mode is effective when accurate
positioning is required.
ENCODER
CCWLS
DRIVER
RD-0 SERIE S
A-PHA SE,B-PHA SE,(Z-PHAS E)
ORG(HOME)LS
CWLS
PC
PLC
SWITCH, ETC.
Input port Input for motor control
IN
5V
2.2k
Ω
Equivalent to
CMOS 74HC
5
R1
IN
Low Level : Less than 0.8V Low Level : Less than 1.5V
High Level: More than 2.0V High Level: More than 3.5V
470
R1
2.2K
Output port Output for motor control
COM
OUT
OUT
50V/100mA
GND
Open Collector (Darlington
Voltage: Less than 50V
Current: Less than 200mA (per one
contact)
Less than 800mA in total of
8 contacts
Vce(sat): Less than 1.1V (Ic
・Tr ans ist or)
:200mA)
GND
CMOS
74HC
Ω (EA, EB)
Ω(Others)
RC-234
18Ω
Supply voltage 18 to 40VDC (including ripple)
Supply current Less than 100mA (at 24 VDC)
Pulse rate 0.1 to 1Mpps
Data memory position
0 to 16,777,215 pulses
or -8,388,608 to +8,388,607
Number of profiles 1,000 (each axis)
Accel./Decel method S-curve, Trapezoidal
Interpolation function
Input ports
Output ports
2-axis circular interpolation
2-axis linear interpolation
10 (8 in a servo mode)
10 (8 in a servo mode)
Stall detection method Encoder or STALL sensor
Control signal line
Baud rate
User program
Recommended drivers
Control motors
Outside dimensions
Current loop method of RS232C
(use Link Master RC-002)
38400, 19200, 9600,
2400, 1200, 300 bps
8,000 bytes
(approx. 1,500 commands)
Pulse Input Drivers
(RD-0 series)
2 (Synchronized motion of the
2 axes is available.)
27.5(H)×105(W)×56(D)mm
Weight approx. 250g
Two-axis interpolation control
Circular and linear interpolation controls are
available in the XY plane.
Can configure more complex paths by combining
circular and linear interpolation.
Y
Starting point
Center 1
Linear move
Circular mov e
Center 2
Destination
Speed change during a interpolation control.
f (speed)
Starting point
Destination
X
t (time)
3. Servo motor control (Pulse input type driver)
Mode to control a servo motor by
connecting with a pulse input servo
motor driver.
CCWLS
SERVO MOTOR DRIVER
PULSE INPUT
INPOSITION (A LARM, Z-PHASE)
Sample of user program
ORG(HOME)LS
COUNTER・CLEAR
CWLS
PC
PLC
SWITCH, ETC.
/22000/JON3+1/J-2/4//END
(“/” is a separator between commands)
action: This pro
and when the input port D3 is turned ON,
moves a motor b
direction
is terminat ed.
You can also us e in the following stand alone mode:
Once the user pro
and autostart is enabled, the controller will start the
program automatically upon turning ON the power.
ram sets a position pulse number
2,000 pulses in the CCW
Command 4) and the user program
ram is transferred to EEPROM
Dimensions
M4 Screw
GND
DC18V -40
GENERATE
MASTER
PWR
RUN
TXD
ERR
BODY NO.
V
8
9
7
A
6
B
5
C
4
D
3
E
2
F
1
0
20 D7 19 D6
18 D5 17 D4
IN
16 D3 15 D2
14 D1 13 D0
12 GND 11 GND
10 D7 9 D6
8 D5 7 D4
6 D3 5 D2
OUT
4 D1 3 D0
2 GND 1 COM
RC-234
105
95
1 COM IN
2 TXD IN
3 RXD IN
4 COM OUT
5 TXD OUT
6 RXD OUT
7 RXD END
8 N.C .
CURRENT LOOP
9 N.C .
10 N.C .
MOTOR 1
1 +5V
3CW/P
5 CCWLS
7CWLS
9EB
SERVO&EMS
11 G ND
13 I NP1
15 INP2
MOTOR2
1
7 +5V
19 CW/P
21 CCWLS
23 CWLS
25 EB
2GND
4 CCW/ D
6ORG
8EA
10 EZ
12 EMS
14 CLR1
16 CLR2
18 GND
20 CCW/D
22 ORG
24 EA
26 EZ
MADE IN VIETNAM
(mm)
30
56
224
27.5
16 17
A
t
f
A
Compact
dapter RS-232C → Current loop
C
-
0
0
2
R
R
C
C
-
0
-
0
0
0
2
2
Compact
dapter Current loop → RS-232C
C
-
0
0
3
R
R
C
C
-
0
-
0
0
0
3
3
LINK MASTER
Examples
Example 1
RC-002 RC-003
PC
Example 2
RC-002
RS-232C
PC
Current LoopRS-232C RS-232C
RC-204A
RC-207A
Current Loop Current Loop Curr ent Loop
RD-3 series
Driver
Motor MotorI/O Circuits I/O Circuits
Connection Terminal Layout
Description
Link Master RC-002 converts the computer ’s RS-232C signal to curren
loop type.
Features
●Compliant with CE Marking.
●Communication by only 3 wires makes wiring and maintenance o
device easy.
●Current loop transmission system improves the noise-resistant and
long distance communication is available.
●With communication of the master slave system, the controller to 20
sets and RC-003 are connectable with one set of RC-002 as a slave.
●Communication speed is 40kbps max.
Specifications
Supply voltage 18 to 40VDC (including ripple)
Supply current Less than 20mA (at 24VDC)
RD-0 series
Driver
PC
RC-234
Communication method
Current loop transmission
Convert the computer’s
Function
RS-232C voltage signal to
current loop signal
Baud rate 40kbps max.
Outside dimensions
27.5(H)×105(W)×56(D)mm
Weight approx. 250g
Dimensions
(mm)
LINK MASTER
RC-204A
RC-002
RS-232 C
PC
RC-207A
RC-234
Current loop
Driver
Motor I/O Circuits
Current loop
Connection Terminal Layout
Description
Link Master RC-003 converts current loop signal to RS-232C.
Features
●Long distance communication by using with RC-002
●Can display commands sent from a PC to each I/O master/
generate master on the other PC’s monitor screen and thus
it becomes easy to debug the control program.
SpecificationsSystem configuration
Supply voltage 18 to 40VDC (including ripple)
AB
RC-003
Supply current Less than 20mA (at 24VDC)
Communication method
Function
Current loop transmission
Convert current loop signal
to RS-232C
Baud rate 40kbps max.
SUB PC
to Moni tor Comm ands
Outside dimensions
27.5(H)×105(W)×56(D)mm
Weight approx. 250g
Dimensions
RC-002 / RC-003
(mm)
GND
DC18V-40V
RXD
TXD
SHORT
COM
RXD
TXD
COM
END
RS-232C CURRENT ADAPTER
OUT
LINK MASTER
RC-003
IN
RS-232C
RS-232C
RXD
1
RXD
TXD
2
TXD
GND
GND
3
4
5
6
MADE IN JAPAN
PC side
TO TXD
TO RX D
TO GND
M4 Screw
GND
DC18V-40V
6RXD
5
TXD
4
COM
3
RXD
TXD
2
1
COM
SHORT
105
95
RS-232C CURRENT ADAPTER
END
OUT
IN
RS-232C
RS-232C
LINK MASTER
RC-003
79
1
RXD
RXD
TXD
TXD
2
GND
GND
3
4
5
6
MADE IN JAPAN
GND
18-40VDC
LED
(NOTE)
TO RXD IN
TO TXD IN
TO COM IN
Controller side
6
5
4
3
2
1
GND
DC18V-40V
RXD OUT
TXD OUT
COM
RXD OUT
TXD OUT
COM
RS-232C CURRENT ADAPTER
CURRENT
LOOP2
LINK MASTER
RC-002
CURRENT
LOOP1
RS-232C
1
RXD
2
TXD
3
GND
4
5
6
MADE IN JAPAN
PC side
TO TXD
TO RX D
TO GND
The voltage signal inputted from terminals to connect with a
PC is converted to current signal inside and outputted from
terminals to connect with a controller.
(Note)
When the total number of controllers to connect is over
10, please remove the LED connected at output side
of RC-002, and use both of the two output terminals.
You can connect up to 10 controllers to one of output
terminals of RC-002.
M4 Screw
GND
DC18V-40V
6RXD OUT
5
TXD OUT
4
COM
3
RXD OUT
2
TXD OUT
1
COM
105
95
RS-232C CURRENT ADAPTER
CURRENT
LOOP2
LINK MASTER
RC-002
CURRENT
LOOP1
79
RS-232C
RXD
TXD
GND
MADE IN JAPAN
GND
18-40VDC
1
2
3
4
5
6
30
56
LED
(NOTE)
TO RXD OUT
TO TXD OUT
TO COM OUT
Controller side
6
5
4
3
2
1
The current signal inputted from terminals to connect
with a controller is converted to the voltage signal inside
and outputted from terminals to connect with a PC.
(Note)
22
27.5
4
OUT: Terminals to connect additional controllers.
For connection, please remove the LED.
IN: Terminals which are connected host PC side
controllers.
18 19
22
30
4
56
27.5
A
Compact
dapter USB → Current loop
Light-weight
C
R
-
C
C
-
-
R
LINK MASTER
0
0
0
0
4
0
4
0
4
Description
The RC-004 is the communication adaptor (USB ⇔ current loop
converter) for the RC-200 series controller. The RC-004 is operated
only by the power supplied from the USB port, and using the device
driver, it can be used as a virtual port from the host side.
The RC-004 is designed as a development tool. Use the RC-002
instead of the RC-004 when mounting it on devices.
USB cable should be prepared by the user.
Features
●Compact and light-weight
●Power supply is unnecessary.
●Perfect for the development with the notebook computer without
RS-232C.
●Can be used as a virtual COM port and thus it can use the past
software data.
RC-004
Examples
Note PC
USB
RC-004
Curre nt loop
RD-0 series
Driver
Motor
RC-234
Current loop
Specifications Dimensions
Supply current Less than 500mA
Communication method
Function
Port insulation
Max. communication speed
USB standards In compliance with USB1.1
Operating System (OS)
Current loop transmission
Convert the computer’s USB
signal to current loop signal
Not insulated between USB
and current loop
38400 bps
(depending on controller specifications)
Windows98, 2000, XP
6 RXD OUT
5 TXD OUT
4 COM
3 RXD OUT
2 TXD OUT
1 COM
CURRENT
LOOP 2
CURRENT
LOOP 1
LINK MASTER
RC-004
56mm
RC-204A
RC-207A
RD-3 series
Driver
Motor
RXD TX D PWR
OUT OU T
USB PORT
S/N:J0A0000
MADE IN JAPAN
500mAm ax
21mm
40mm
Outside dimensions
Weight 33g
20 21
21(H)×56(W)×40(D)mm
Option connectors for wiring
■ I/O Cable ■ Connectors
Socket with flat cable
Model:RCC-○○
P□□□L
↓
Number of pins:10, 20, 26
Flat cable with a single-sided socket ×1
Length (c m):50, 100, 200, 300
Lock lever ×1
■ Tools
Hand Crimper for flat-cable
connectors
Model:TOOL-901500
Necessary when connecting sockets with
flat-cabl e.
Socket for flat cable
Model:RCF-○○
↓
Number of pins:10, 20, 26
Strain relief ×1
Socket ×1
Lock lever ×1
Hand Crimper for discrete-wire
connectors
Model:TOOL-XY2B-7006
Necessary when connecting sockets with
discrete-wires.
P
Sockets used for each controller
Socket for discrete wires (for AWG#24)
Model:RCR-○○P
↓
Number of pins:10, 20, 26
Semi cover ×2
Socket ×1
Lock lever ×1
RC-204A, RC-207A RC-234
Output c onnector
20P
Communication connector
10P
GND
BODY NO.
8
9
7
A
DC18V-40V
OUT
PORT2
OUT
PORT1
I/O MASTER
6
5
4
3
2
20 D7
18 D5
16 D3
14 D1
12 GND
10 D7
8D5
6D3
4 CCW
2 GND
RC-204A
B
C
D
E
F
1
0
19 D6
17 D4
15 D2
13 D0
11 COM
9D6
7D4
5 LOW
3 START
1 COM
1COMIN
2TXDIN
3 RXD IN
4 COM OUT
5 TXD OUT
6 RXD OUT
7RXDEND
8 N.C.
CURRENT LOOP
9BAT+
10 BAT -
1D4
2D5
3D6
4D7
5 GND
6GND
7 CCW
8ORG
9CW
10 D3
11 D4
12 D5
13 D6
14 D7
15 GND
16 GND
17 D0
18 D1
19 D2
20 D3
22 D5
21 D4
24 D7
23 D6
3.6V
26 GND
25 CLOCK
MADE IN JAPAN
Utilized sockets : 10P×1
20P×1
26P×1
IN
PORT1
IN
PORT2
IN
PORT3
Input connector
26P
I/O connector
20P
Communication connector
10P
GND
DC18V-40
GENERATE
MASTER
V
PWR
RUN
TXD
ERR
BODY NO.
8
9
7
A
6
B
5
C
4
D
3
E
2
F
1
0
20 D7 19 D6
18 D5 17 D4
IN
16 D3 15 D2
14 D1 13 D0
12 GND 11 GND
10 D7 9 D6
8 D5 7 D4
6 D3 5 D2
OUT
4 D1 3 D0
2 GND 1 COM
RC-234
1 COM IN
2 TXD IN
3 RXD IN
4 COM OUT
5 TXD OUT
6 RXD OUT
7 RXD END
8 N.C.
CURRENT LOOP
9 N.C.
10 N.C.
MOTOR1
1+5V
3CW/P
5CCWLS
7CWLS
9EB
SERVO&EMS
11 GND
13 INP1
15 INP2
MOTOR2
7+5V
1
19 CW/P
21 CCWLS
23 CWLS
25 EB
2GND
4 CCW /D
6ORG
8EA
10 EZ
12 EMS
14 CLR1
16 CLR2
18 GND
20CCW/D
22 ORG
24 EA
26 EZ
MADE IN JAPAN
Utilized sockets : 10P×1
20P×1
26P×1
I/O connector
26P
Option connectors
Suitable connectors (Manufactured by OMRON)
For Flat cable
Sockets
XG4M -2630 (for 26P)
-2030 (for 20P)
-1030 (for 10P)
Strain reliefs
XG4T -2604 (for 26P)
-2004 (for 20P)
-1004 (for 10P)
For Discrete wire
Sockets
for AWG#28 to 26
XG5M -2635 (for 26P)
-2035 (for 20P)
-1035 (for 10P)
for AWG#24
XG5M -2632 (for 26P)
-2032 (for 20P)
-1032 (for 10P)
Semicovers
XG5S -1301 (for 26P)
-1001 (for 20P)
-0501 (for 10P)
Lock lever (Stopper to prevent from coming off a socket.)
XG4Z-0002
22 23
 Loading...
Loading...