


R&S®FPS-K30
Noise Figure Measurements
User Manual
(;Úâï2)
1176849702
Version 04

This manual applies to the following R&S®FPS models with firmware version 1.70 and higher:
●
R&S®FPS4 (1319.2008K04)
●
R&S®FPS7 (1319.2008K07)
●
R&S®FPS13 (1319.2008K13)
●
R&S®FPS30 (1319.2008K30)
●
R&S®FPS40 (1319.2008K40)
The following firmware options are described:
●
R&S FPS-K30 (1321.4104.02)
© 2021 Rohde & Schwarz GmbH & Co. KG
Mühldorfstr. 15, 81671 München, Germany
Phone: +49 89 41 29 - 0
Email: info@rohde-schwarz.com
Internet: www.rohde-schwarz.com
Subject to change – data without tolerance limits is not binding.
R&S® is a registered trademark of Rohde & Schwarz GmbH & Co. KG.
Trade names are trademarks of the owners.
1176.8497.02 | Version 04 | R&S®FPS-K30
The following abbreviations are used throughout this manual: R&S®FPS is abbreviated as R&S FPS.

R&S®FPS-K30
1.1 Typographical Conventions......................................................................................... 7
2.1 Starting the Noise Application.....................................................................................8
2.2 Understanding the Display Information......................................................................9
4.1 Tuning Modes.............................................................................................................. 21
4.1.1 Swept Measurements................................................................................................... 22
4.1.2 Frequency Table Measurements...................................................................................22
Contents
Contents
1 Preface.................................................................................................... 7
2 Welcome to the Noise Figure Measurement Application................... 8
3 Measurements and Result Displays...................................................12
4 Measurement Basics........................................................................... 21
4.1.3 Single Frequency Measurements................................................................................. 22
4.2 Measurement Modes...................................................................................................23
4.3 DUT Types....................................................................................................................25
4.3.1 Measurements on Linear DUTs (Direct Measurement).................................................25
4.3.2 Measurements on Frequency Converting DUTs........................................................... 25
4.4 External Generator Control........................................................................................ 26
4.5 Image Frequency Rejection....................................................................................... 28
4.6 Calibration (2nd Stage Correction)............................................................................30
4.7 Separating Signals by Selecting an Appropriate Resolution Bandwidth.............. 33
4.8 Analyzing Several Traces - Trace Mode.................................................................... 34
4.9 Using Markers............................................................................................................. 35
5 Configuration........................................................................................38
5.1 Configuration Overview..............................................................................................38
5.2 Defining the Measurement Frequency...................................................................... 40
5.2.1 Defining a Frequency Set..............................................................................................40
5.2.2 Configuring Single Frequency Measurements.............................................................. 43
5.2.3 Using a Frequency Table.............................................................................................. 44
5.3 Selecting DUT Characteristics...................................................................................45
5.4 Configuring the Noise Source................................................................................... 47
5.4.1 Defining the Noise Source Characteristics....................................................................47
3User Manual 1176.8497.02 ─ 04

R&S®FPS-K30
5.4.2 Using an ENR or Temperature Table............................................................................ 50
5.5 Configuring Additional Loss......................................................................................52
5.5.1 Defining Loss................................................................................................................ 53
5.5.2 Using a Loss Table........................................................................................................55
5.6 Configuring the Analyzer........................................................................................... 58
5.7 Using the Uncertainty Calculator.............................................................................. 61
5.7.1 Configuring Noise Source Characteristics.................................................................... 62
5.7.2 Configuring DUT Characteristics...................................................................................64
5.7.3 Configuring Analyzer Characteristics............................................................................ 65
5.7.4 Guidelines and Results................................................................................................. 66
5.8 Performing Measurements.........................................................................................67
5.9 Configuring Inputs and Outputs of the R&S FPS.....................................................68
5.9.1 Radio Frequency (RF) Input..........................................................................................68
Contents
5.9.2 External Generator........................................................................................................69
6 Analysis................................................................................................ 74
6.1 Configuring the Display..............................................................................................74
6.1.1 Configuring Graphical Results...................................................................................... 74
6.1.2 Configuring Numerical Results......................................................................................76
6.2 Working with Traces................................................................................................... 77
6.3 Using Markers............................................................................................................. 79
6.3.1 Marker Configuration.....................................................................................................79
6.3.2 Marker Positioning........................................................................................................ 81
6.4 Limit Line Settings and Functions............................................................................ 83
6.4.1 Limit Line Management.................................................................................................83
6.4.2 Limit Line Details...........................................................................................................85
7 Remote Control Commands for Noise Figure Measurements.........88
7.1 Common Suffixes........................................................................................................89
7.2 Introduction................................................................................................................. 89
7.2.1 Conventions used in Descriptions.................................................................................89
7.2.2 Long and Short Form.................................................................................................... 90
7.2.3 Numeric Suffixes........................................................................................................... 90
7.2.4 Optional Keywords........................................................................................................ 91
7.2.5 Alternative Keywords.................................................................................................... 91
4User Manual 1176.8497.02 ─ 04

R&S®FPS-K30
7.2.6 SCPI Parameters.......................................................................................................... 91
7.3 Controlling the Noise Figure Measurement Channel.............................................. 94
7.4 Working with Windows in the Display.......................................................................98
7.5 General Window Commands....................................................................................104
7.6 Retrieving Measurement Results............................................................................ 105
7.7 Defining the Measurement Frequency.................................................................... 106
7.8 Selecting DUT Characteristics................................................................................. 111
7.9 Configuring the Noise Source..................................................................................113
7.10 Configuring Additional Loss....................................................................................120
7.11 Configuring the Analyzer......................................................................................... 127
7.12 Using the Uncertainty Calculator............................................................................ 132
7.13 Performing Measurements.......................................................................................142
7.14 Configuring the Inputs and Outputs........................................................................147
Contents
7.14.1 Radio Frequency (RF) Input........................................................................................147
7.14.2 External Generator......................................................................................................148
7.15 Configuring the Display............................................................................................151
7.16 Working with Traces................................................................................................. 155
7.17 Working with Limit Lines..........................................................................................160
7.17.1 Defining General Characteristics of a Limit Line......................................................... 161
7.17.2 Defining Horizontal Data Points.................................................................................. 162
7.17.3 Controlling Lower Limit Lines...................................................................................... 163
7.17.4 Controlling Upper Limit Lines...................................................................................... 165
7.17.5 Managing Limit Lines.................................................................................................. 166
7.17.6 Controlling Limit Checks............................................................................................. 167
7.18 Working with Markers...............................................................................................169
7.18.1 Using Markers............................................................................................................. 170
7.18.2 Using Delta Markers....................................................................................................172
7.18.3 Configuring Markers....................................................................................................175
7.18.4 Positioning Markers.....................................................................................................176
7.18.5 Positioning Delta Markers........................................................................................... 178
7.19 Using the Status Register........................................................................................ 180
7.19.1 Status Registers for Noise Figure Measurements...................................................... 181
7.20 Deprecated Remote Commands for Noise Figure Measurements....................... 187
5User Manual 1176.8497.02 ─ 04

R&S®FPS-K30
7.21 Programming Example: Measuring a Noise Figure............................................... 188
A Reference: Frequency Table File Format.........................................189
Contents
Annex.................................................................................................. 189
List of Remote Commands (Noise Figure)...................................... 190
Index....................................................................................................195
6User Manual 1176.8497.02 ─ 04
R&S®FPS-K30
1 Preface
1.1 Typographical Conventions
Preface
Typographical Conventions
The following text markers are used throughout this documentation:
Convention Description
"Graphical user interface elements"
[Keys] Key and knob names are enclosed by square brackets.
Filenames, commands,
program code
Input Input to be entered by the user is displayed in italics.
Links Links that you can click are displayed in blue font.
"References" References to other parts of the documentation are enclosed by quota-
All names of graphical user interface elements on the screen, such as
dialog boxes, menus, options, buttons, and softkeys are enclosed by
quotation marks.
Filenames, commands, coding samples and screen output are distinguished by their font.
tion marks.
7User Manual 1176.8497.02 ─ 04
R&S®FPS-K30
2 Welcome to the Noise Figure Measurement
Welcome to the Noise Figure Measurement Application
Starting the Noise Application
Application
The R&S FPS-K30 is a firmware application that adds functionality to perform noise figure measurements to the R&S FPS.
Noise Source Control
The Noise Source Control connector on the R&S FPS is a prerequisite for the R&S
FPS Noise Figure measurements application.
This user manual contains a description of the functionality that the application provides, including remote control operation.
Functions that are not discussed in this manual are the same as in the Spectrum application and are described in the R&S FPS user manual. The latest versions of the manuals are available for download at the product homepage.
http://www.rohde-schwarz.com/product/FPS.html.
Installation
Find detailed installing instructions in the getting started or the release notes of the
R&S FPS.
● Starting the Noise Application...................................................................................8
● Understanding the Display Information.....................................................................9
2.1 Starting the Noise Application
The noise figure measurement application adds a new type of measurement to the
R&S FPS.
Manual operation via an external monitor and mouse
Although the R&S FPS does not have a built-in display, it is possible to operate it interactively in manual mode. To do so, use the graphical user interface and connect an
external monitor and a mouse.
It is recommended that you use the manual mode initially to get familiar with the instrument and its functions before using it in pure remote mode. Thus, this document
describes in detail how to operate the instrument manually using an external monitor
and mouse. The remote commands are described in the second part of the document.
For details on manual operation, see the R&S FPS getting started manual.
To activate the R&S FPS Noise Figure measurements application
1. Select the [MODE] key.
8User Manual 1176.8497.02 ─ 04
R&S®FPS-K30
Welcome to the Noise Figure Measurement Application
Understanding the Display Information
A dialog box opens that contains all operating modes and applications currently
available on your R&S FPS.
2. Select the "Noise Figure" item.
The R&S FPS opens a new measurement channel for the noise figure measurement application.
All settings specific to noise figure measurements are in their default state.
Multiple Channels and Sequencer Function
When you activate an application, a new channel is created which determines the
measurement settings for that application ( "Channel" ). The same application can be
activated with different measurement settings by creating several "Channel" s for the
same application.
The number of channels that can be configured at the same time depends on the available memory on the instrument.
Only one measurement can be performed at any time, namely the one in the currently
active channel. However, to perform the configured measurements consecutively, a
Sequencer function is provided.
If activated, the measurements configured in the currently defined "Channel" s are performed one after the other in the order of the tabs. The currently active measurement is
indicated by a
The result displays of the individual channels are updated in the tabs (as well as the
"MultiView" ) as the measurements are performed. Sequential operation itself is independent of the currently displayed tab.
For details on the Sequencer function, see the R&S FPS user manual.
symbol in the tab label.
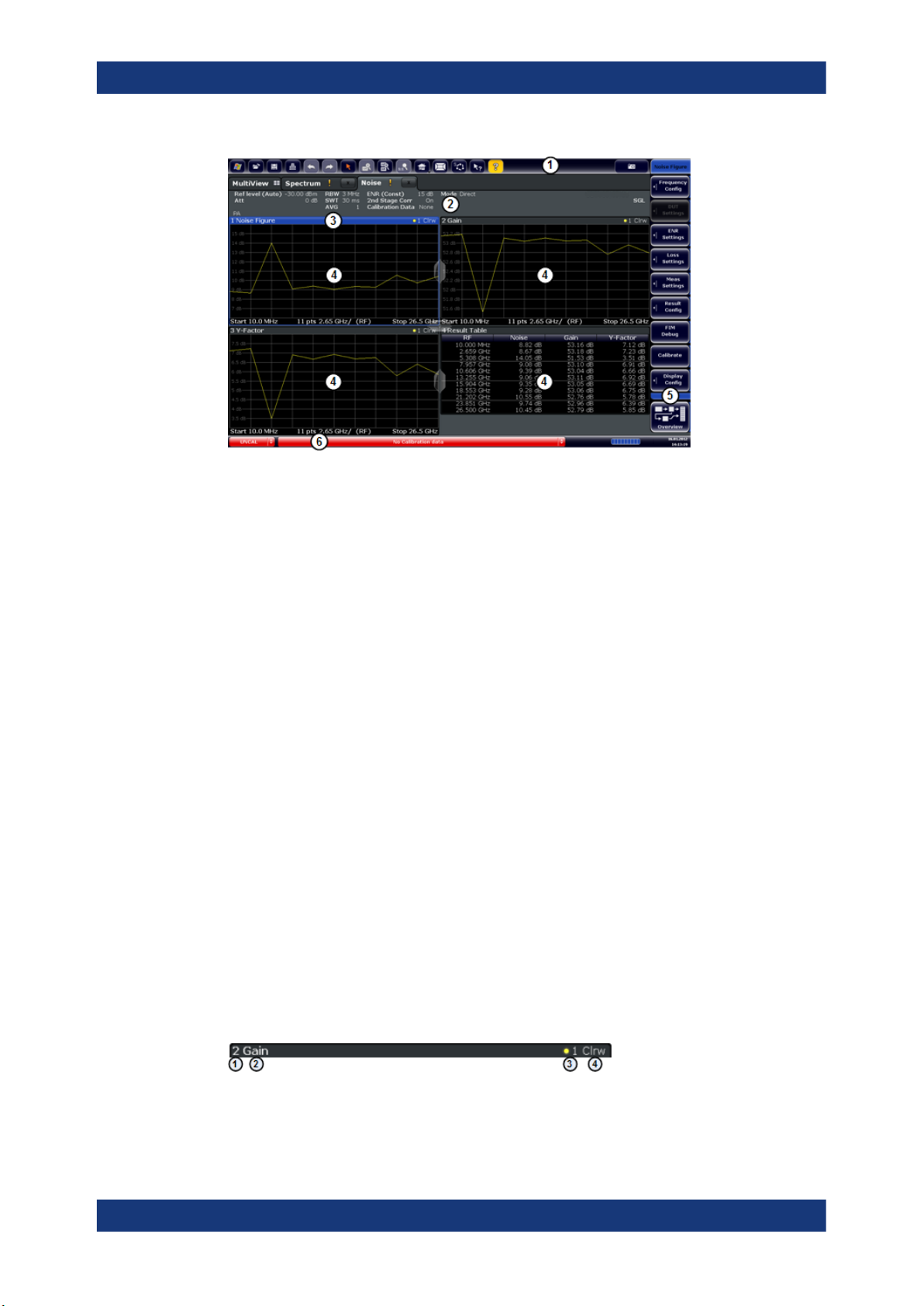
2.2 Understanding the Display Information
The following figure shows the display as it looks for noise figure measurements. All
different information areas are labeled. They are explained in more detail in the following sections.
9User Manual 1176.8497.02 ─ 04
R&S®FPS-K30
Welcome to the Noise Figure Measurement Application
Understanding the Display Information
Figure 2-1: Screen layout of the noise figure measurement application
1 = Toolbar
2 = Channel bar
3 = Diagram header
4 = Result display
5 = Softkey bar
6 = Status bar
Channel bar information
In the R&S FPS Noise Figure measurements application, the R&S FPS shows the following settings:
Ref Level Reference level of the R&S FPS.
Att Attenuation of the R&S FPS.
RBW Resolution bandwidth
SWT Sweep time
AVG Number of averages
ENR Excess noise ratio
2nd Stage Corr State of the 2nd stage correction.
Calibration Data Date and time of the current calibration data.
Mode Currently selected measurement mode.
Window title bar information
For each diagram, the header provides the following information:
Figure 2-2: Window title bar information for the R&S FPS Noise Figure measurements application
10User Manual 1176.8497.02 ─ 04

R&S®FPS-K30
Welcome to the Noise Figure Measurement Application
Understanding the Display Information
1 = Window number
2 = Window type
3 = Trace color and number
4 = Trace mode
Status bar information
Global instrument settings, the instrument status and any irregularities are indicated in
the status bar beneath the diagram. Furthermore, the progress of the current operation
is displayed in the status bar.
Risk of damaging the instrument
Make sure not to overload the input mixer during calibration and the measurement. An
overload condition can damage or destroy the input mixer.
If an overload condition occurs, the R&S FPS shows a corresponding message in the
status line ("RF OVLD" or "IF OVLD").
To avoid an overload during calibration or measurement, do one or more of the following:
●
Check and adjust the DUT gain settings
●
Check and adjust the ENR settings
●
Increase the reference level.
11User Manual 1176.8497.02 ─ 04
R&S®FPS-K30
3 Measurements and Result Displays
Measurements and Result Displays
The R&S FPS-K30 measures the noise figure of a DUT and displays the results graphically and numerically. Each graphical result display shows the noise figure from a different perspective. In the default configuration, the application shows the noise figure
of the DUT, the gain of the DUT and the corresponding y-factor. In addition, it shows
the numerical results of the measurement.
The scale of the horizontal axis depends on the tuning mode.
Frequency list and swept measurements
In all graphical result displays, the horizontal axis represents the frequency. The displayed frequency is either the RF (radio frequency) or the IF (intermediate frequency).
The range depends on the frequency set you have currently defined. Because the
application only measures selected frequencies, it connects the results to draw a trace.
Negative noise figure and noise temperature
From a physical point of view, the noise figure and the noise temperature levels have a
positive range (including zero).
Due to the mathematical operations the application performs, the results can be negative. Sometimes this happens due to incorrect calibration or variance of measurement
values.
Single frequency measurements
In all graphical result displays, the horizontal axis represents a chronological order of
measurement results for the frequency you are testing. The axis has no unit, but is
made up out of several index values that represent time. Each index value represents
12User Manual 1176.8497.02 ─ 04

R&S®FPS-K30
out
in
SNR
SNR
Figure Noise
Measurements and Result Displays
one measurement point and therefore one measurement on the single frequency you
are analyzing. The size of the index (and thus number of results) depends on the number of (Measurement) Points that you have defined. Because the application only
measures at certain points in time, it connects the results to draw a trace.
The right diagram border represents the present (index = 0), values to the left represent past measurement results (index = -<x>). As soon as the application finishes a
single measurement, the measurement points are moved to the left, the new result is
added on the right. All other measurement points are moved down one position with
the most obsolete result falling out of the diagram (like in the roll mode of an oscilloscope).
Selecting the result display
►
Select the
icon in the toolbar or press the [MEAS] key.
The application enters the SmartGrid configuration mode.
For more information on the SmartGrid functionality, see the R&S FPS Getting
Started.
Noise Figure..................................................................................................................13
Gain...............................................................................................................................14
Noise Temperature........................................................................................................14
Y-Factor.........................................................................................................................15
ENR Measured..............................................................................................................16
Power (Hot)...................................................................................................................17
Power (Cold)................................................................................................................. 17
Cal Y-Factor.................................................................................................................. 18
Cal Power (Hot).............................................................................................................18
Cal Power (Cold)...........................................................................................................19
Result Table.................................................................................................................. 19
Current Values...............................................................................................................20
Marker Table................................................................................................................. 20
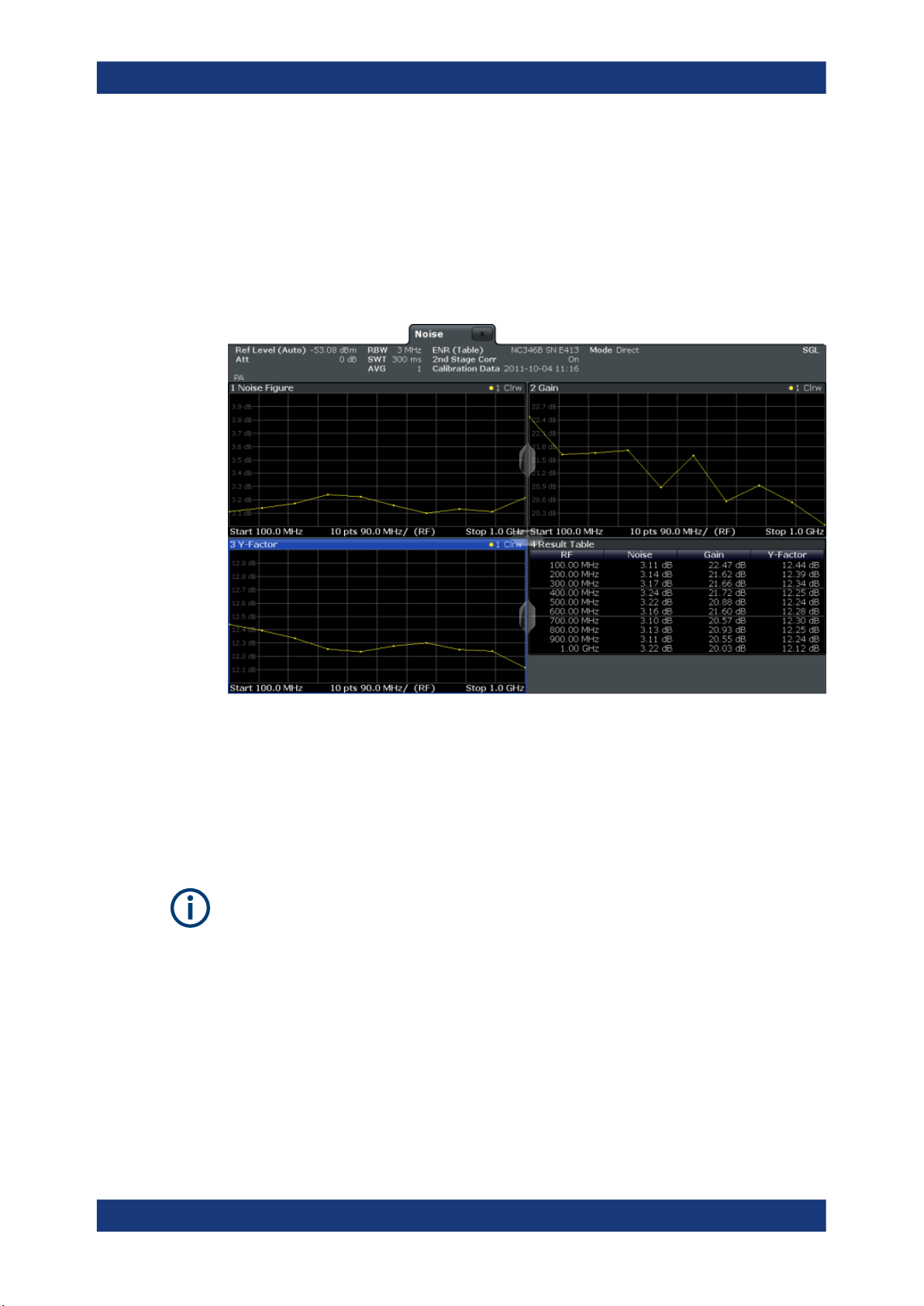
Noise Figure
Shows the noise figure of the DUT.
The noise figure is the ratio of the signal-to-noise ratio at the DUT input to the signal-
to-noise ratio at the DUT output.
The vertical axis shows the level of the noise figure in dB. The scale depends on the
settings in the "Display Configuration" dialog box.
13User Manual 1176.8497.02 ─ 04
R&S®FPS-K30
Measurements and Result Displays
Remote command:
LAY:ADD:WIND? '2',RIGH,NOIS see LAYout:ADD[:WINDow]? on page 98
Results:TRACe<t>[:DATA]? <Trace>,NOISe
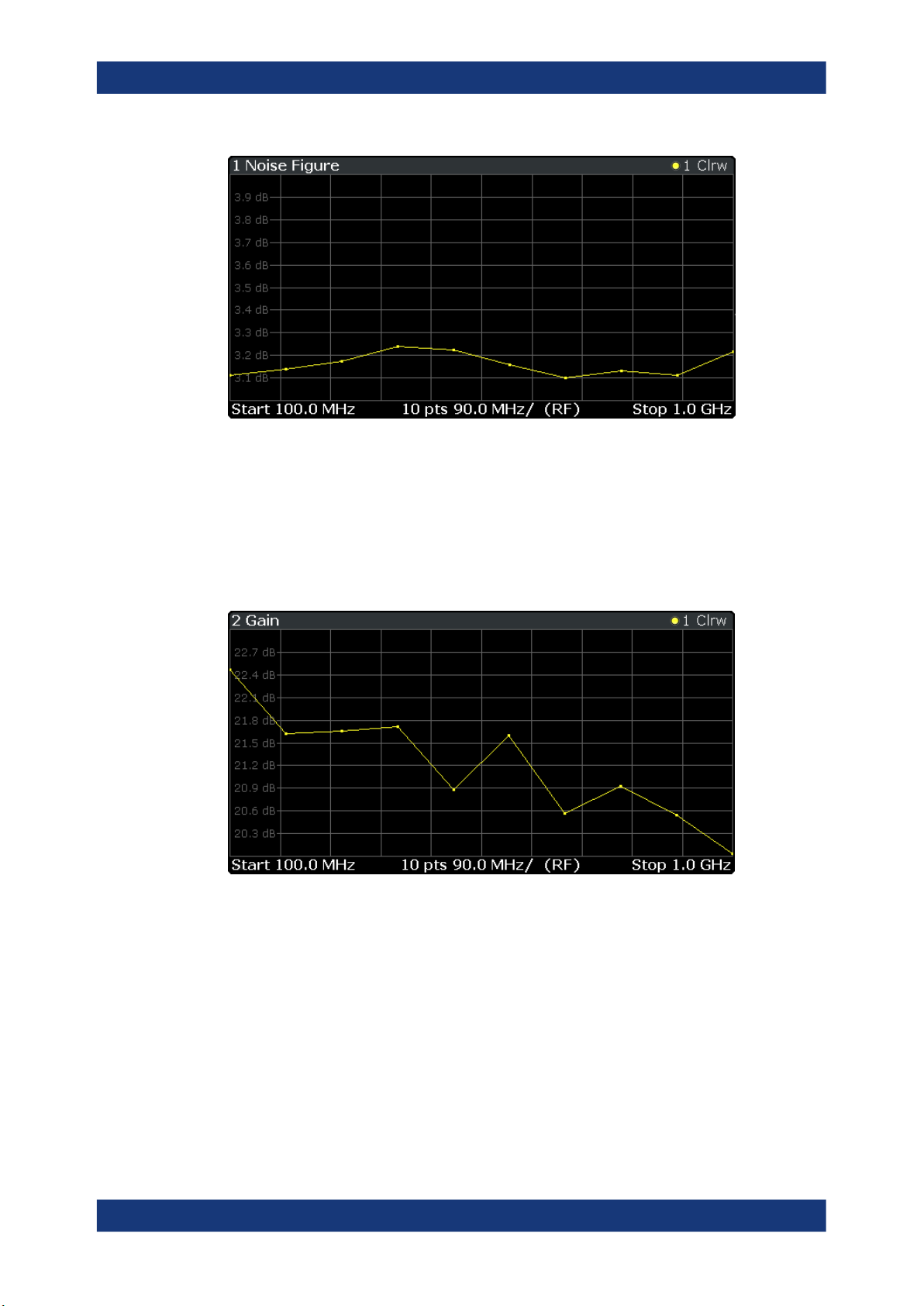
Gain
Shows the gain characteristics of the DUT.
The vertical axis shows the level of the gain in dB. The scale depends on the settings
in the "Display Configuration" dialog box.
Remote command:
LAY:ADD:WIND? '2',RIGH,GAIN see LAYout:ADD[:WINDow]? on page 98
Results:TRACe<t>[:DATA]? <Trace>,GAIN
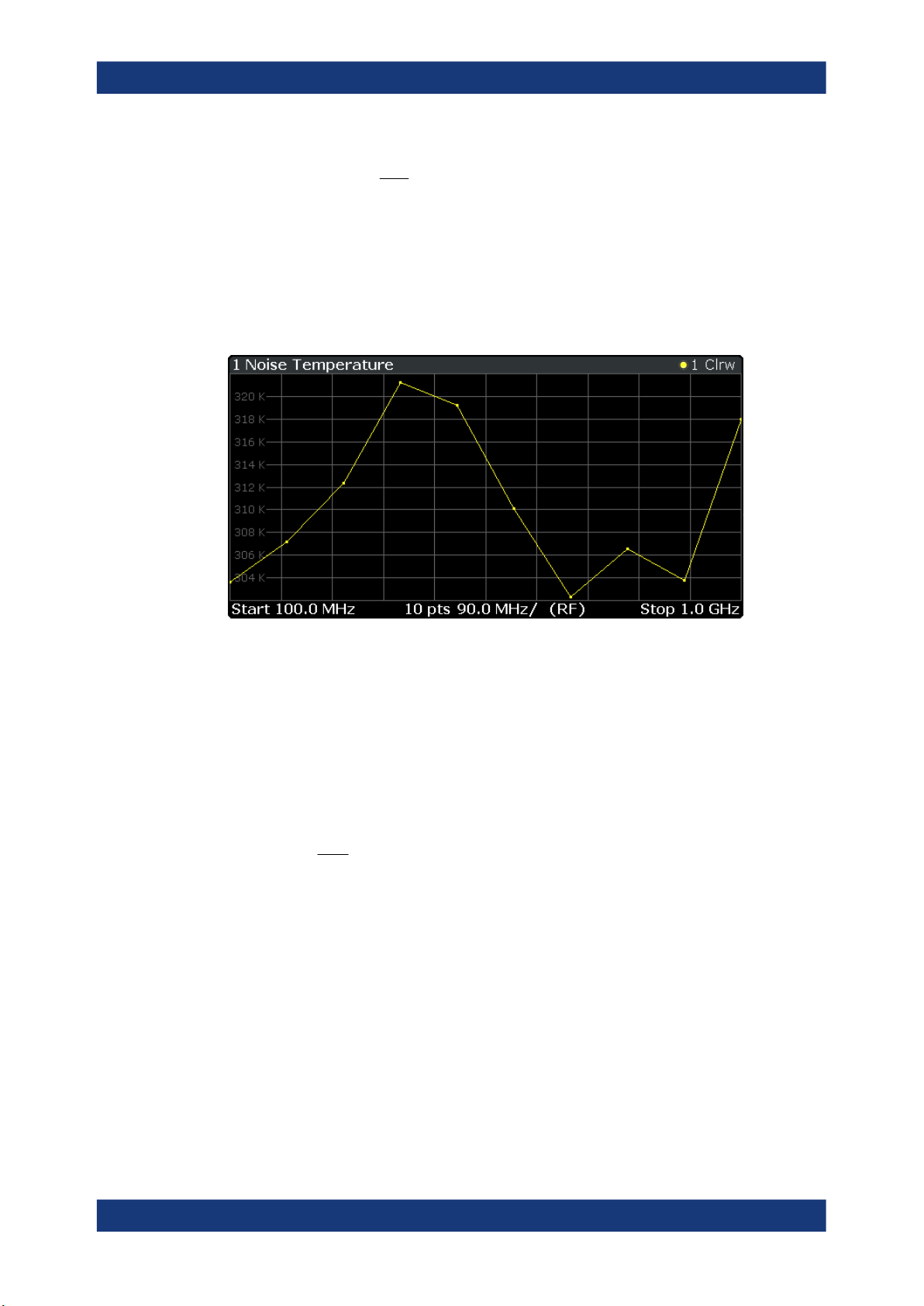
Noise Temperature
Shows the noise temperature characteristics of the DUT.
14User Manual 1176.8497.02 ─ 04
R&S®FPS-K30
constant Boltzmannk
BandwidthB
PowerP
with
eTemperatur Noise
kB
P
off source noise with[dB] power Noise
on source noise with[dB] power Noise
with
FactorY
off
on
off
on
N
N
N
N
Measurements and Result Displays
The vertical axis shows the noise temperature in Kelvin. The scale depends on the settings in the "Display Configuration" dialog box.
Remote command:
LAY:ADD:WIND? '2',RIGH,TEMP see LAYout:ADD[:WINDow]? on page 98
Results: TRACe<t>[:DATA]? <Trace>,TEMPerature
Y-Factor
Shows the ratio of the hot and the cold power of the DUT.
The Y-factor indicates the quality of measurement tolerances and uncertainties. To get
the result, the application measures the DUT power with the noise source turned on
(hot power) and the noise source turned off (cold power).
The vertical axis shows the linear relation. The scale depends on the settings in the
"Display Configuration" dialog box.
15User Manual 1176.8497.02 ─ 04

R&S®FPS-K30
Measurements and Result Displays
Remote command:
LAY:ADD:WIND? '2',RIGH,YFAC see LAYout:ADD[:WINDow]? on page 98
Results: TRACe<t>[:DATA]? <Trace>,YFACtor
ENR Measured
Shows the results of the ENR measurement.
To measure the ENR of a noise source, first attach a noise source with known ENR to
the device, enter the ENR of this noise source to the calibration ENR table and calibrate using this one. Then, attach the unknown noise source to the device and perform
a measurement ("Run Single") with this one. The graph shown in the ENR Measured
display and the results for ENR Measured in the Result Summary will be the ENR of
the noise source at the measured frequencies. The vertical axis shows the level of the
measured ENR in dB. The scale depends on the settings in the "Display Configuration"
dialog box.
16User Manual 1176.8497.02 ─ 04

R&S®FPS-K30
Measurements and Result Displays
Remote command:
LAY:ADD:WIND? '2',RIGH,ENR see LAYout:ADD[:WINDow]? on page 98
Results: TRACe<t>[:DATA]? <Trace>,ENR
Power (Hot)
Shows the absolute power characteristics at the instrument input. The noise source is
turned on.
The vertical axis shows the power in dBm. The scale depends on the settings in the
"Display Configuration" dialog box.
Remote command:
LAY:ADD:WIND? '2',RIGH,PHOT see LAYout:ADD[:WINDow]? on page 98
Results: TRACe<t>[:DATA]? <Trace>,PHOT
Power (Cold)
Shows the absolute power characteristics at the instrument input. The noise source is
turned off.
The vertical axis shows the power in dBm. The scale depends on the settings in the
"Display Configuration" dialog box.
17User Manual 1176.8497.02 ─ 04
R&S®FPS-K30
off source noise with[dB] power Noise
on source noise with[dB] power Noise
with
FactorY
off
on
off
on
N
N
N
N
Measurements and Result Displays
Remote command:
LAY:ADD:WIND? '2',RIGH,PCOL see LAYout:ADD[:WINDow]? on page 98
Results: TRACe<t>[:DATA]? <Trace>,PCOLd
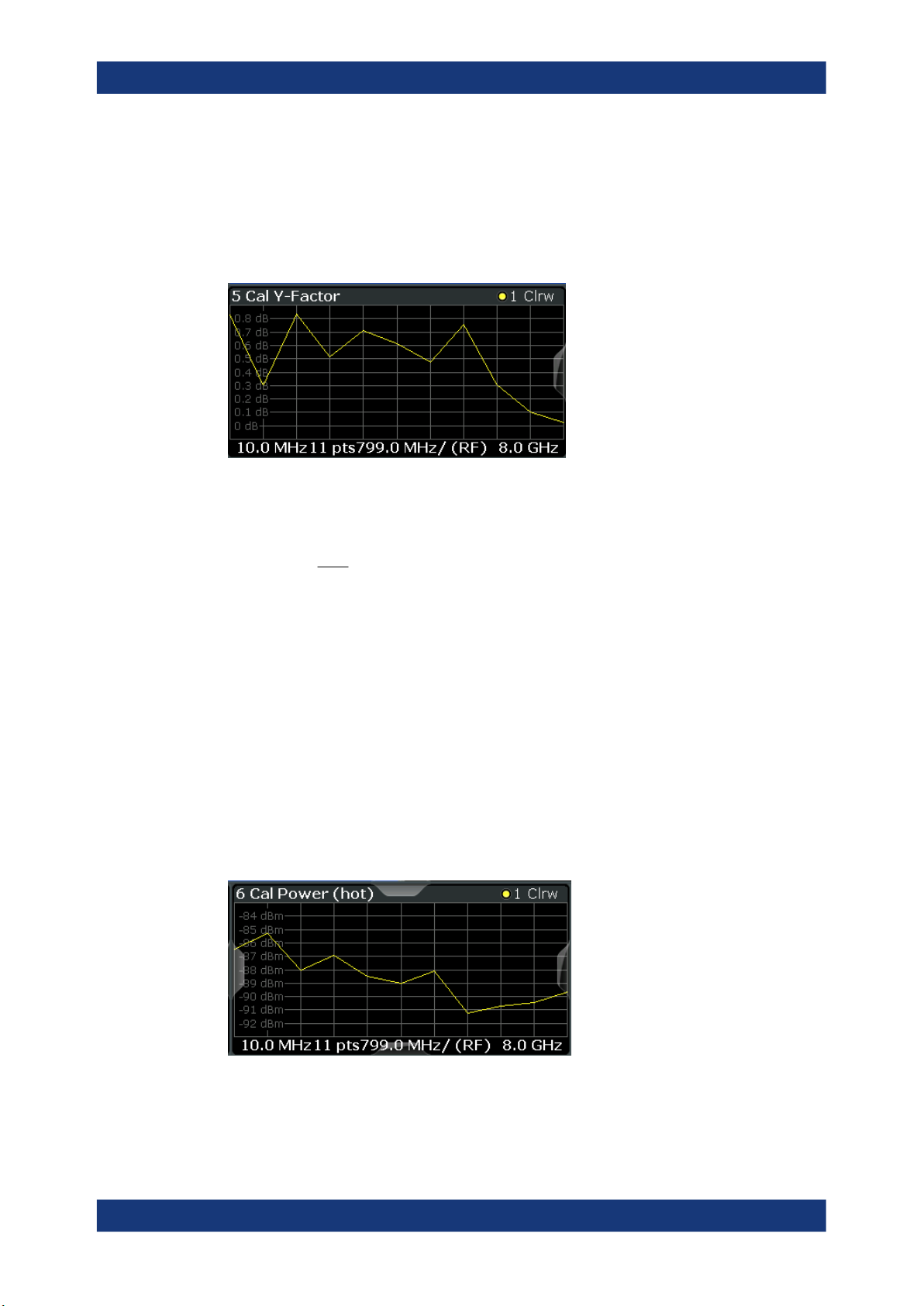
Cal Y-Factor
Shows the ratio of the hot and the cold power measured during calibration.
The Y-factor indicates the quality of measurement tolerances and uncertainties. To get
the result, the application measures the power with the noise source turned on (hot
power) and the noise source turned off (cold power), but without the DUT inserted.
The vertical axis shows the linear relation. The scale depends on the settings in the
"Display Configuration" dialog box.
Remote command:
LAY:ADD:WIND? '2',RIGH,CYF see LAYout:ADD[:WINDow]? on page 98
Results: TRACe<t>[:DATA]? <Trace>,CYFactor
Cal Power (Hot)
Shows the absolute power characteristics at the instrument input during the calibration
measurement. The noise source is turned on, the DUT is not inserted.
The vertical axis shows the power in dBm. The scale depends on the settings in the
"Display Configuration" dialog box.
18User Manual 1176.8497.02 ─ 04

R&S®FPS-K30
Measurements and Result Displays
Remote command:
LAY:ADD:WIND? '2',RIGH,CPH see LAYout:ADD[:WINDow]? on page 98
Results: TRACe<t>[:DATA]? <Trace>,CPHot
Cal Power (Cold)
Shows the absolute power characteristics at the instrument input during the calibration
measurement. The noise source is turned off, the DUT is not inserted.
The vertical axis shows the power in dBm. The scale depends on the settings in the
"Display Configuration" dialog box.
Remote command:
LAY:ADD:WIND? '2',RIGH,CPC see LAYout:ADD[:WINDow]? on page 98
Results: TRACe<t>[:DATA]? <Trace>,CPCold
Result Table
Shows the measurement results in numerical form in a table.
The contents of the table depend on the "Display Settings". By default it shows the
noise figure, gain and y-factor results. Each row represents one measurement point.
Each column represents one result type. The first column shows the measurement frequency.
If you display the uncertainty result, it is displayed in the "Noise" column next to the
Noise Figure result. Note that the uncertainty is displayed only after you have turned
on the uncertainty calculation and also include the result in the display.
The result table shows either the RF or the IF, depending on your selection.
For more information, see Chapter 6.1.2, "Configuring Numerical Results",
on page 76.
Remote command:
LAY:ADD:WIND? '2',RIGH,RES see LAYout:ADD[:WINDow]? on page 98
Results: TRACe<n>[:DATA]? on page 105
Table items: DISPlay[:WINDow<n>]:TABLe:ITEM on page 151
19User Manual 1176.8497.02 ─ 04

R&S®FPS-K30
Measurements and Result Displays
Current Values
Shows the result at the current measurement point.
The contents of the "Current" result display are updated as soon as a new measure-
ment point is analyzed.
The result types shown in the table depend on the "Display Settings". By default it
shows the results for the Noise Figure, Gain and Y-Factor result type. Each row represents one result type. The first column shows the result type, the second column
shows the result.
For more information, see Chapter 6.1.2, "Configuring Numerical Results",
on page 76.
Marker Table
Shows the marker characteristics in numerical form in a table.
The size of the table depends on the number of active markers and the way you have
configured the table in the "Result Config" dialog box. For more information, see Chap-
ter 6.3, "Using Markers", on page 79 and Chapter 6.1.2, "Configuring Numerical
Results", on page 76.
The first four columns of the table are fix.
●
Type
Shows the marker type. 'M' represents a normal marker, 'D' represents a delta
marker.
●
Ref
Shows the reference marker for relative delta markers.
●
Trc
Shows the trace that the marker is positioned on.
●
X-value
Shows the horizontal position (frequency) of the marker.
For normal markers, the position is an absolute value. The position of delta markers is relative to another marker.
●
<Result>
Shows the measurement result at the marker position.
For normal markers, the result is an absolute value. Results for delta markers are
relative to another marker.
Remote command:
LAY:ADD:WIND? '2',RIGH,MTAB see LAYout:ADD[:WINDow]? on page 98
Results:
CALCulate<n>:MARKer<m>:Y? on page 171
CALCulate<n>:DELTamarker<m>:Y? on page 174
20User Manual 1176.8497.02 ─ 04

R&S®FPS-K30
4 Measurement Basics
Measurement Basics
Tuning Modes
The measurement basics contain background information on the terminology and principles of noise figure measurements.
Noise figure measurements determine the noise that a device under test (DUT) adds to
a signal as that signal passes through the DUT.
● Tuning Modes......................................................................................................... 21
● Measurement Modes.............................................................................................. 23
● DUT Types..............................................................................................................25
● External Generator Control..................................................................................... 26
● Image Frequency Rejection.................................................................................... 28
● Calibration (2nd Stage Correction)..........................................................................30
● Separating Signals by Selecting an Appropriate Resolution Bandwidth.................33
● Analyzing Several Traces - Trace Mode................................................................. 34
● Using Markers.........................................................................................................35
4.1 Tuning Modes
Basically, the application calculates the noise figure of a DUT based on the characteristics of the DUT that have been measured and a noise source whose properties are
known. Therefore, the Noise Source Control connector on the R&S FPS is a prerequisite for the R&S FPS Noise Figure measurements application.
In addition to the noise characteristics of a DUT, the application is also able to determine several more DUT characteristics like its gain or its noise temperature characteristics.
Noise
source +28V
Noise
Source
The application provides several measurement modes or tuning modes.
● Swept Measurements............................................................................................. 22
● Frequency Table Measurements.............................................................................22
● Single Frequency Measurements........................................................................... 22
RF Input
DUT
21User Manual 1176.8497.02 ─ 04
R&S®FPS-K30
4.1.1 Swept Measurements
Measurement Basics
Tuning Modes
The sweep tuning mode performs measurements on a set of discrete frequencies
based on the frequency parameters. Each measurement analyzes the noise characteristics of the corresponding frequency or measurement point.
For swept measurements, the application automatically determines the measurement
frequencies and combines them in a frequency list.
Such a frequency set is the result of the frequency and span information that you have
provided. The frequency and span information is made up out of the center frequency,
the span, the start and the stop frequency. In combination with the measurement points
or the frequency table step size, the application calculates the contents of the frequency table.
The center frequency is the frequency in the center of the frequency band you are
measuring. Thus, it is defined either by the span, or the start and stop frequencies.
The measurement points is the number of entries in a frequency list and thus the
number of measurements that the application performs during a noise figure measurement.
The stepsize defines the distance between two measurement points. It is constant for
all measurement points.
If the stepsize is larger than the distance between start and stop frequency, the frequency table consists of the start and stop frequencies only.
4.1.2 Frequency Table Measurements
The frequency table tuning mode also performs measurements on a set of frequencies based on the contents of a frequency list. Each measurement analyzes the noise
characteristics of the corresponding frequency.
Compared to a swept measurement, you can customize the contents of the frequency
list. Thus, you can add frequencies that are independent of the frequency stepsize and
the number of measurement points.
4.1.3 Single Frequency Measurements
The single frequency tuning mode performs one or several consecutive measurements on a single frequency. You can perform the measurement on any frequency that
is supported by the hardware you are using.
Single frequency measurements are a way to facilitate manual adjustments for noise
figure measurements. They also allow you to get an idea about how the noise figure at
a particular frequency change over time.
Note that sweep lists or frequency tables are not considered in this measurement
mode.
22User Manual 1176.8497.02 ─ 04
R&S®FPS-K30
4.2 Measurement Modes
Measurement Basics
Measurement Modes
Single frequency measurement results
For single frequency measurements, the same set of graphical result displays is available as for frequency list measurements (Noise Figure, Gain etc.). Note, however, that
the x-axis has no unit, but shows a series of results taken for a single frequency. The
number of displayed results depends on the number of measurement points you have
defined.
For more information, see Chapter 3, "Measurements and Result Displays",
on page 12.
In addition, you can also view the results in the Result Table in numerical form.
Single frequency measurements are not available when you are using a resistor as a
noise source.
In some cases, the Power (Hot) and Power (Cold) results require two different noise
sources with different temperature characteristics (cold and hot). Measurements with a
resistor noise source are such a case.
Usually, noise sources with diode characteristics are used for Noise Figure measurements. These noise sources have two states, on and off. When they are supplied with
power (state = on), the application measures the hot power, when they are not supplied
with power (state = off), it measures the cold power. Turning the noise source on and
off is automatically done by the application, so that you can get the hot and cold power
characteristics in a single step.
This automatic measurement mode is the default measurement mode of the R&S
FPS Noise Figure measurements application.
A resistor noise source, however, requires two resistors, one hot and one cold. You
have to substitute the hot resistor by the cold resistor to measure first the hot and then
the cold power. For these cases, the application provides a manual measurement
mode. This measurement mode is automatically selected when you select a "Noise
Source" on page 48 with resistor characteristics, but is not restricted to those cases.
The manual measurement mode is available for measurements and the calibration
stage.
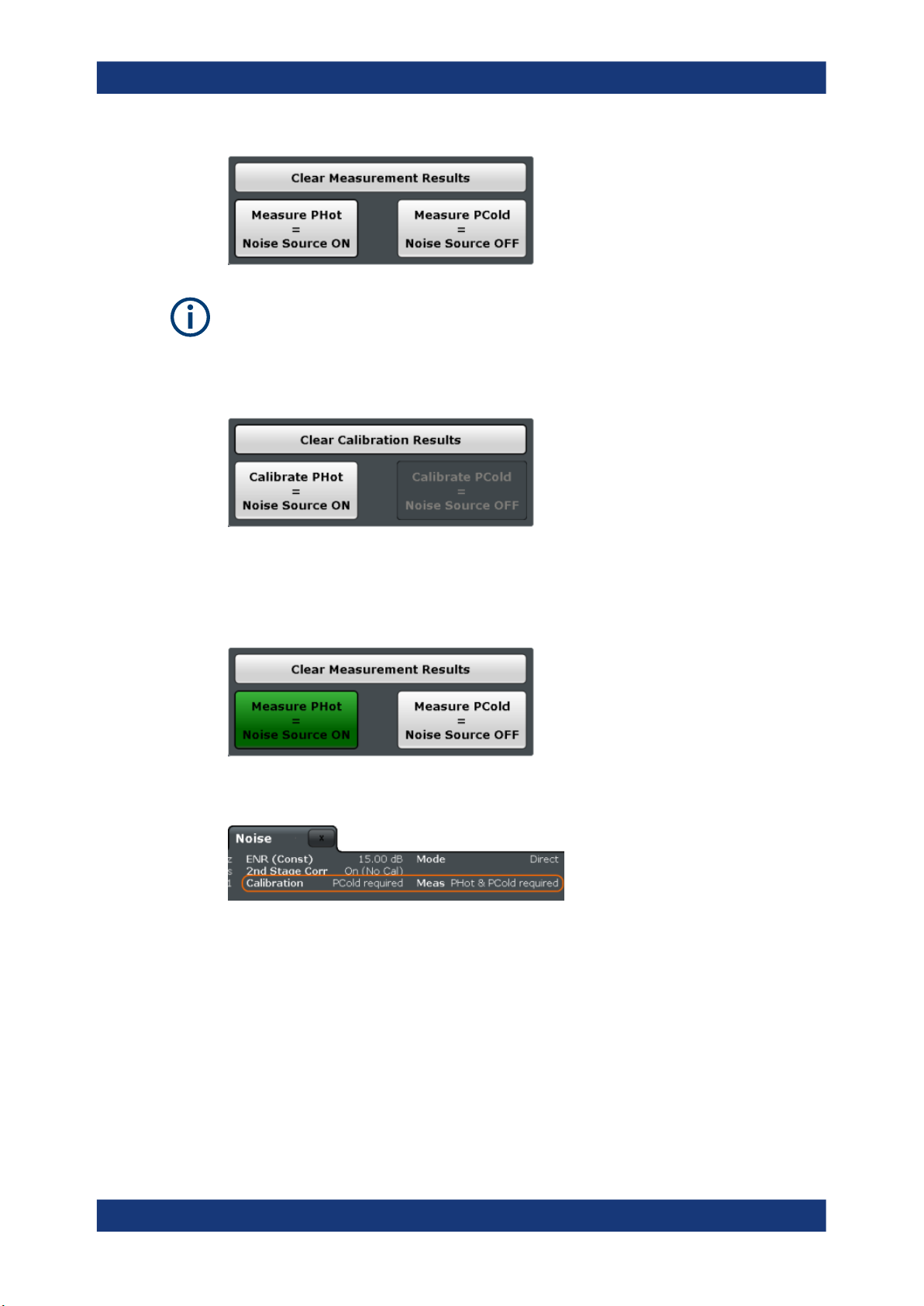
Performing a manual measurement
In manual measurement mode, you have to measure (or calibrate) the hot and cold
power characteristics of the DUT separately. When you start the measurement, the
application opens a dialog box that allows you to select the type of measurement to
perform next.
23User Manual 1176.8497.02 ─ 04
R&S®FPS-K30
Measurement Basics
Measurement Modes
Recommended order of measurements
Note that it is recommended that you begin with the hot power measurement.
Furthermore, calibration always begins with the hot power measurement.
In case the hot power has to be measured first, the cold power measurement is
unavailable:
When the first measurement is done, you can change the test setup by connecting the
other resistor. Then start the second measurement.
In the dialog box, the measurement stage that is already done is labeled green.
In addition, the application shows the missing calibration and measurement steps in
the channel bar.
Clearing results
To replace the previous calibration or measurement results, clear the currently stored
data using the "Clear Calibration Results" or "Clear Measurement Results" function.
24User Manual 1176.8497.02 ─ 04
R&S®FPS-K30
4.3 DUT Types
Measurement Basics
DUT Types
Returning to automatic measurement mode
When you are in automatic measurement mode and select a noise source with resistor
characteristics, the application automatically selects the manual measurement mode.
When you are in manual measurement mode and select a noise source with diode
characteristics, you have to select the automatic measurement mode deliberately in
the "Sweep" menu.
Noise figure measurements are possible on DUTs with a wide variety of characteristics.
The DUT characteristics not only affect the test setup, but also determine the way the
application populates the frequency list for swept measurements.
The R&S FPS Noise Figure measurements application supports measurements on
DUTs that work on a fixed frequency as well as measurements on frequency-converting DUTs.
● Measurements on Linear DUTs (Direct Measurement)...........................................25
● Measurements on Frequency Converting DUTs..................................................... 25
4.3.1 Measurements on Linear DUTs (Direct Measurement)
For a linear DUT, the RF frequency remains the same between its input and output.
For measurements on such DUTs, it is sufficient to measure the signal's RF frequency
without any additional equipment (like a local oscillator). A typical linear DUT is an
amplifier, for example.
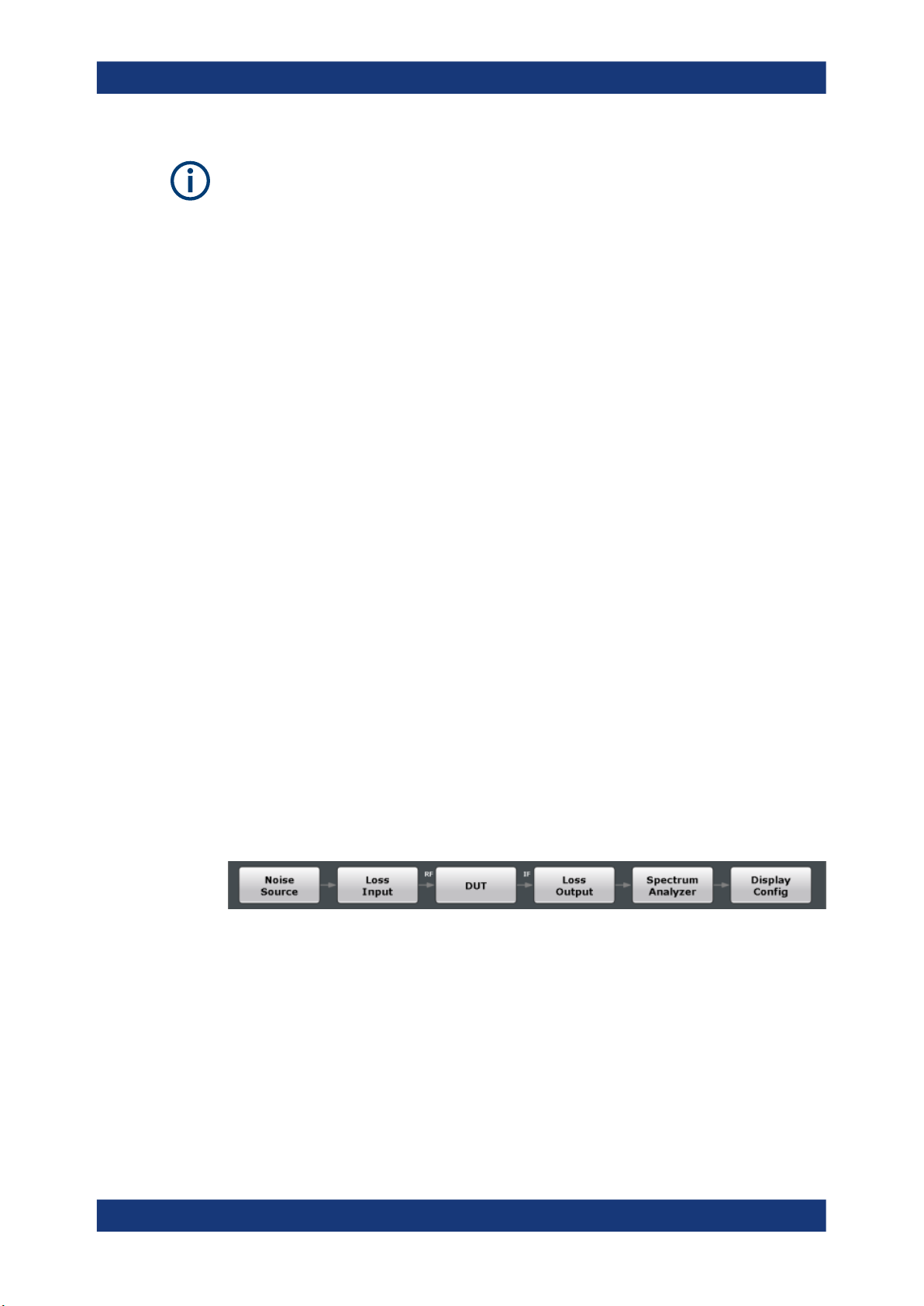
The test setup for measurements on such DUTs usually consists of the noise source,
the DUT and an analyzer. If necessary, the measurement also considers loss that
occurs somewhere in the measurement path.
For linear DUTs, the contents and layout of the "Overview" dialog box represents the
configuration of a typical test setup.
4.3.2 Measurements on Frequency Converting DUTs
A frequency converting DUT converts the RF frequency to an intermediate frequency
(IF) using the local oscillator (LO). A frequency-converting DUT either converts the RF
frequency to a lower IF (down-conversion) or a higher IF (up-conversion).
The conversion process requires a local oscillator in the test setup. You can generate
the LO signal in two ways.
●
An external generator controlled by the analyzer via IEC bus.
25User Manual 1176.8497.02 ─ 04

R&S®FPS-K30
Measurement Basics
External Generator Control
●
A VCO controlled by a voltage source.
If you have selected a frequency-converting DUT measurement mode, the layout of the
"Overview" dialog box adds the local oscillator to the test setup.
The local oscillator can have a fixed or a variable frequency. If the LO frequency is
fixed, the intermediate frequency (IF) resulting from the conversion process is variable
(depending on the input signal). If the LO frequency is variable, the IF has to be fixed.
The R&S FPS Noise Figure measurements application provides measurement for both
measurement scenarios.
Fixed intermediate frequency
If you select one of the fixed IF measurement modes, the IF is the same for all entries
in the frequency list. The LO frequency for each entry is variable and is the result of the
equation the selected mode is based on.
●
fRF - fIF for up-converters
●
fRF + fIF for down-converters
The fixed IF measurement modes are, for example, useful for measurements on mixers.
Note that fixed IF measurements are only possible if the R&S FPS is equipped with the
optional External Generator Control hardware. For more information, see Chapter 4.4,
"External Generator Control", on page 26.
Fixed LO frequency
If you select one of the fixed LO measurement modes, the LO frequency is the same
for all entries in the frequency list. The IF frequency for each entry is variable and is the
result of the equation the selected mode is based on.
●
fRF + fLO for up-converters
●
fRF - fLO for down-converters
The fixed LO measurement modes are, for example, required for measurements on
satellite converters.
4.4 External Generator Control
To perform fixed IF measurements with the R&S FPS Noise Figure measurements
application, you have to install the optional External Generator Control hardware. This
option allows you to control an external generator and the type of signal it generates.
26User Manual 1176.8497.02 ─ 04

R&S®FPS-K30
Measurement Basics
External Generator Control
The typical measurement setup for such measurements includes the R&S FPS equipped with the optional R&S FPS Noise Figure measurements application, a signal generator and the DUT. The signal generator is controlled via the LAN connection.
To enhance the measurement accuracy, it is recommended to use a common reference frequency for both R&S FPS and signal generator in the measurement setup.
If you have no 10 MHz reference frequency on hand, you can use the internal reference signal of the R&S FPS or signal generator. For more information, see the documentation of the R&S FPS or the signal generator.
Signal generator support
The R&S FPS-B10 supports various signal generators. A list is available in the user
interface (see Generator Type ) and in the documentation of the R&S FPS.
Note that you have to select the generator specifically for the R&S FPS Noise Figure
measurements application. It does not inherit the generator settings from other applications.
It is also possible to add new signal generators to that list. To do so, you have to copy
a custom signal generator setup file with the file extension .gen to the R&S FPS. The
setup file defines the frequency and power ranges supported by the generator, as well
as information required for communication. You can use a setup file of the signal generators already supported as a template. After you copy it to the R&S FPS, the new
generator model is added to the dropdown menu.
The existing setup files can be displayed in an editor in read-only mode directly from
the Interface Configuration dialog box.
Make sure to adhere to the required syntax and commands and only change the values of the parameters. Errors are only detected and displayed when you try to use the
custom generator.
Error and status messages
The following status and error messages can occur during external generator control.
Message Description
"Ext. Generator TCPIP Handshake Error!" / Connection to the generator is not possible, e.g. due to a
cable damage or loose connection or wrong address.
"Ext. Generator Limits Exceeded!" The allowed frequency or power ranges for the generator
were exceeded.
"Reverse Sweep via min. Ext. Generator Frequency!"
"Ext. Generator File Syntax Error!" Syntax error in the generator setup file.
"Ext. Generator Command Error!" Missing or wrong command in the generator setup file.
"Ext. Generator Visa Error!!" Error with Visa driver provided with installation (very
Reverse sweep is performed; frequencies are reduced to
the minimum frequency, then increased again.
unlikely).
27User Manual 1176.8497.02 ─ 04
R&S®FPS-K30
Measurement Basics
Image Frequency Rejection
Risk of damage to the instrument
To allow for highest sensitivity during the measurement, the R&S FPS Noise Figure
measurements application automatically sets the input attenuation to 0 dB.
Because this configuration minimizes the overrange reserve, make sure that the signal
you apply does not cause an overload condition. In particular, consider the LO feedthrough. An overload condition can damage or destroy the input mixer.
The R&S FPS shows a corresponding message in the status line if an overload occurs
("RF OVLD" or "IF OVLD").
To avoid an overload, do one of the following:
●
Reduce the LO feedthrough of the mixer device.
●
Increase the reference level.
4.5 Image Frequency Rejection
Frequency converting DUTs convert a radio frequency (RF) to an intermediate frequency (IF). The IF is lower than the RF for down-converting DUTs, and higher than
the RF for up-converting DUTs.
In a basic test setup, the image frequency of the RF signal is also converted to the IF.
Depending on the DUT, this effect can be wanted or even necessary, or not. To avoid
measurement errors of the noise figure and gain of up to 3 dB, make sure to use the
appropriate measurement configuration.
Basically, you can distinguish between single sideband (SSB) mixers, double sideband
(DSB) mixers, and mixers that partly suppress a sideband. If a sideband is not needed
or only partly needed, you can reject the image frequency. If you do so, the application
activates a filter that suppresses the image frequency to a certain extent.
The following illustrations help you configure the measurement correctly.
For more information on how to configure image rejection, see "Image Rejection"
on page 46.
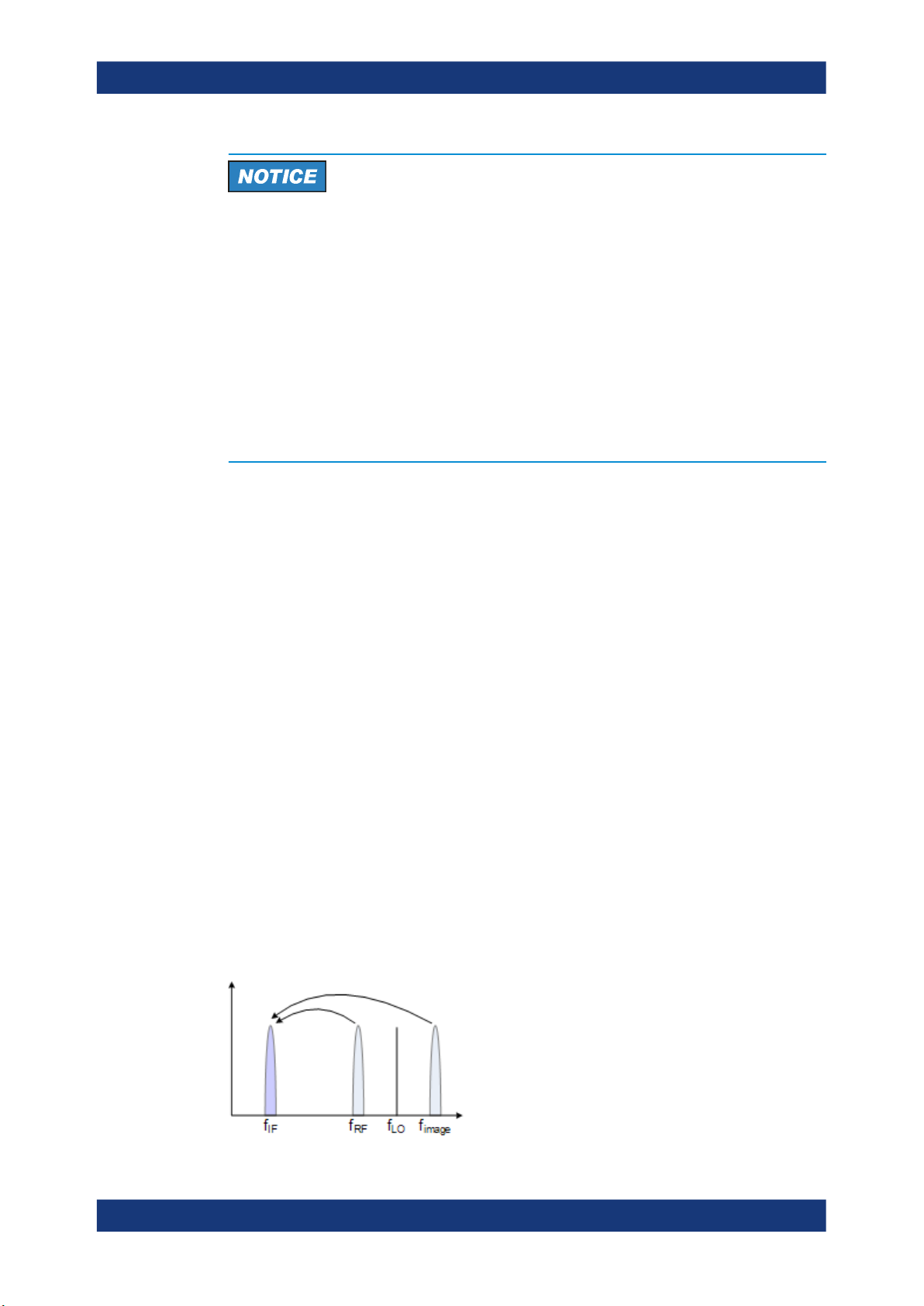
Double sideband measurements
Double sideband mixers use both sidebands to the same extent. Both RF and image
frequency are converted. In that case, turn off image rejection.
28User Manual 1176.8497.02 ─ 04
R&S®FPS-K30
Measurement Basics
Image Frequency Rejection
fLO= frequency of the local oscillator
fIF= intermediate frequency = fRF ± f
fRF= lower sideband = fLO - f
f
= upper sideband = fLO + f
image
LO
IF
IF
If image rejection is on, the results have a 3 dB error. That means noise figure results
are 3 dB lower than they should be. Gain results are 3 dB higher.
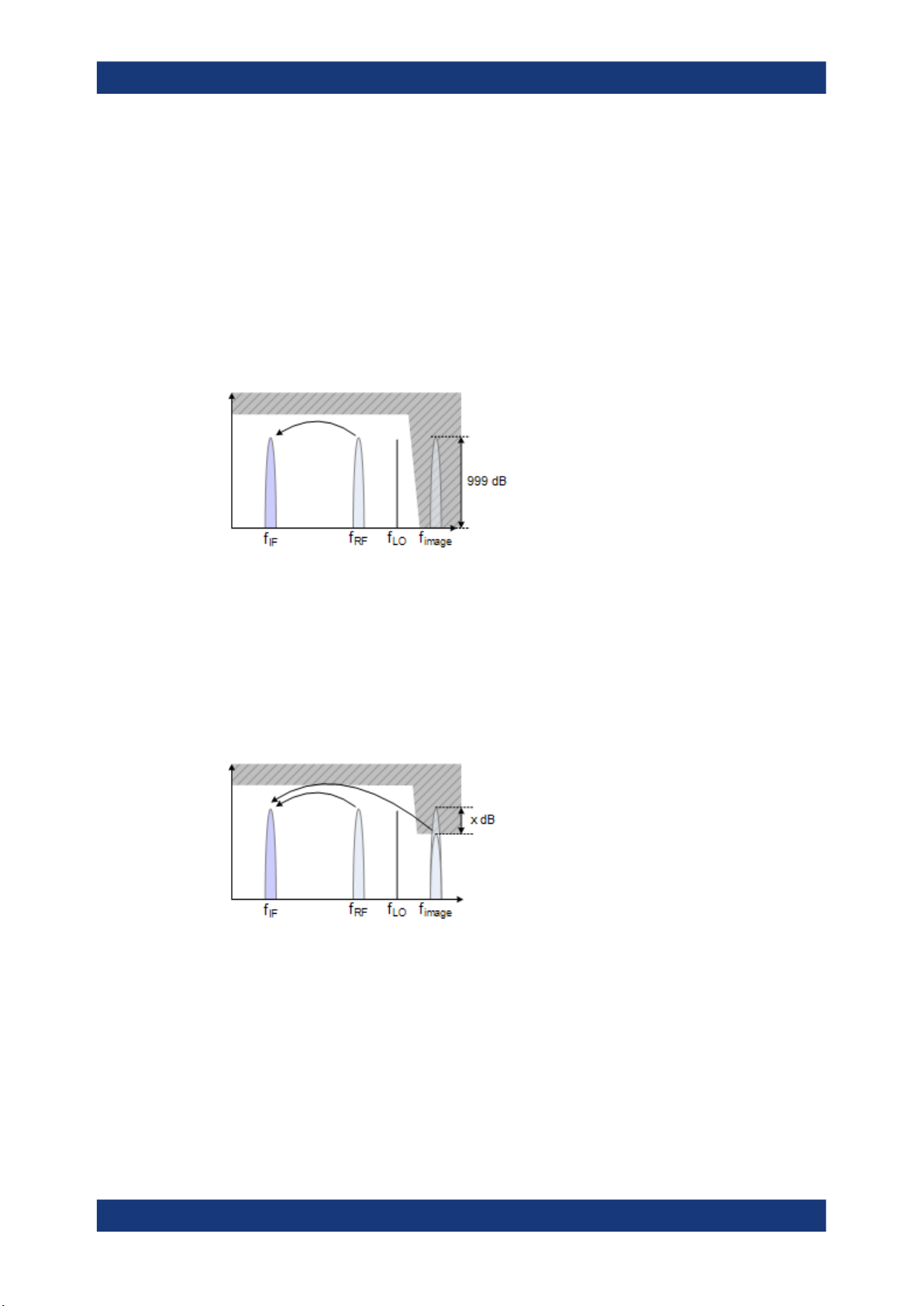
Single sideband measurements
Single sideband mixers use a single sideband only. In that case, you have to suppress
the sideband that is not required. If you do so, the measurement is like on an amplifier.
To suppress a sideband completely, it is best to set the image rejection to the maximum amount possible (999.99 dB).
Partial sideband suppression
For measurements on mixers with a low image frequency rejection, there are two test
scenarios.
●
Mixers whose image rejection is known.
●
Mixers whose image rejection is unknown.
For mixers whose image rejection is known, define the magnitude of image rejection in
dB as accurately as possible. Otherwise, measurement results (noise figure and gain)
deviate between 0 dB to 3 dB.
If you do not know the image rejection characteristics of a mixer, use a custom test
setup including an additional filter. You also have to know the gain characteristics of the
DUT.
29User Manual 1176.8497.02 ─ 04

R&S®FPS-K30
Measurement Basics
Calibration (2nd Stage Correction)
(1) = Test setup for calibration
(2) = Test setup for noise figure measurement
In the test setup shown above, a lowpass filter prevents unwanted noise from being fed
in at the image frequency.
Depending on the position of the frequency bands, you might need a highpass or
bandpass filter for the RF frequency instead of the lowpass filter. The important point is
that unwanted noise is not converted by a further receive path of the mixer. The
unwanted noise at the receive frequency must not be reduced. The insertion loss must
be considered, if applicable.
With this test setup, the measurement on a mixer without sideband suppression is the
same as SSB measurements.
To take the characteristics of the filter into account, include the insertion loss of the filter at the RF. To consider the actual filter suppression at the image frequency, include
the actual attenuation for the image rejection.
Harmonics mixer measurement
For a harmonics mixer, the input signals are not only converted to the IF by the wanted
harmonic. The harmonic of the LO signal produced in the mixer is also converted.
Often, the mixer even features a lower conversion loss for unwanted harmonics. For
measurements on this type of mixer, you have to use a bandpass filter. The filter
ensures that there is only noise at the desired frequency at the input of the DUT. This
measurement is similar to measurements on a mixer with an average sideband suppression.
4.6 Calibration (2nd Stage Correction)
The calibration procedure of the application measures the inherent noise of the
R&S FPS you are using. Performing calibration is therefore recommended, as it increases the accuracy of measurement results. The results get more accurate because the
application takes the inherent noise of the analyzer into account while it calculates the
results.
Calibration for noise figure measurements is also known as 2nd stage correction. This
term is used because in a typical noise figure test setup, the DUT represents the first
stage and the analyzer the second stage in the test setup.
30User Manual 1176.8497.02 ─ 04
 Loading...
Loading...