

Page 1

R&S®EVSG1000
VHF/UHF Airnav/Com Analyzer
User Manual
(;ÜÌK2)
1178622702
User Manual
Version 05
Page 2

This document describes the following R&S®EVSG1000 models with firmware version 1.30 and later:
●
R&S®EVSG1000 (1329.8009.02)
Furthermore, it covers the following options:
●
R&S®EVSG-B1 Second Signal Proc. Unit (1329.8809.02)
●
R&S®EVSG-B2 Battery Management (1329.8815.02)
●
R&S®EVSG-B3 Battery Pack (1329.8821.02)
●
R&S®EVSG-K1 ILS CRS/CLR Analysis (1329.9005.02)
●
R&S®EVSG-K2 VOR Analysis (1329.9011.02)
●
R&S®EVSG-K3 MB Analysis (1329.9028.02)
●
R&S®EVSG-K4 GBAS Analysis (1329.9034.02)
●
R&S®EVSG-K5 SCAT-I Analysis (1329.9040.02)
●
R&S®EVSG-K6 COM Analysis (1329.9057.02)
●
R&S®EVSG-K10 RF Spectrum Analysis (1329.9063.02)
●
R&S®EVSG-K11 AF Spectrum Analysis (1329.9070.02)
●
R&S®EVSG-K12 AF Time Domain Analysis (1329.9086.02)
●
R&S®EVSG-K20 GPS Support (1329.9092.02)
●
R&S®EVSG-K21 Data Recording (1329.9105.02)
●
R&S®EVSG-K22 High Measurement Rate (1329.9111.02)
●
R&S®EVSG-K23 Preselector (1329.9128.02)
●
R&S®EVSG-K24 Power Sensor Support (1329.9134.02)
●
R&S®EVSG1-K25 I/Q Data Streaming (1329.9157.02)
© 2019 Rohde & Schwarz GmbH & Co. KG
Mühldorfstr. 15, 81671 München, Germany
Phone: +49 89 41 29 - 0
Fax: +49 89 41 29 12 164
Email: info@rohde-schwarz.com
Internet: www.rohde-schwarz.com
Subject to change – Data without tolerance limits is not binding.
R&S® is a registered trademark of Rohde & Schwarz GmbH & Co. KG.
Trade names are trademarks of the owners.
1178.6227.02 | Version 05 | R&S®EVSG1000
The following abbreviations are used throughout this manual: R&S®EVSG1000 is abbreviated as R&S EVSG1000.
Page 3

R&S®EVSG1000
1 For Your Safety.....................................................................................13
2 Documentation Overview....................................................................14
2.1 Getting Started Manual...............................................................................................14
2.2 User Manuals and Help...............................................................................................14
2.3 Basic Safety Instructions........................................................................................... 14
2.4 Data Sheets and Brochures....................................................................................... 14
2.5 Release Notes and Open Source Acknowledgment (OSA).....................................15
3 Getting Started..................................................................................... 16
3.1 Key Features................................................................................................................16
3.2 Preparing for Use........................................................................................................ 16
Contents
Contents
3.2.1 Unpacking and Checking the R&S EVSG1000.............................................................16
3.2.2 Setting Up the Instrument............................................................................................. 17
3.2.3 Connecting the Power Supply.......................................................................................18
3.2.3.1 Connecting the Provided DC Power Supply................................................................. 18
3.2.3.2 Connecting an External DC Power Source................................................................... 18
3.2.3.3 Using an Optional Battery Pack (R&S EVSG-B3).........................................................19
3.2.4 Connecting Devices for Signal Input and Output.......................................................... 20
3.2.5 Switching the R&S EVSG1000 On and Off...................................................................20
3.3 Instrument Tour...........................................................................................................21
3.3.1 Front Panel....................................................................................................................21
3.3.1.1 Power Key.....................................................................................................................22
3.3.1.2 Display.......................................................................................................................... 22
3.3.1.3 RX1 IN / RX 2 IN........................................................................................................... 22
3.3.1.4 USB...............................................................................................................................22
3.3.1.5 AF Out...........................................................................................................................22
3.3.1.6 12 V DC Out..................................................................................................................22
3.3.1.7 System Keys................................................................................................................. 22
3.3.1.8 Softkeys........................................................................................................................ 23
3.3.1.9 Function Keys............................................................................................................... 23
3.3.1.10 Keypad.......................................................................................................................... 24
3.3.1.11 Rotary Knob.................................................................................................................. 24
3User Manual 1178.6227.02 ─ 05
Page 4

R&S®EVSG1000
3.3.1.12 Navigation Keys............................................................................................................ 25
3.3.2 Rear Panel.................................................................................................................... 25
3.3.2.1 Power Supply................................................................................................................ 26
3.3.2.2 Demod Out....................................................................................................................26
3.3.2.3 LF In (Baseband Input)................................................................................................. 26
3.3.2.4 PPS In........................................................................................................................... 26
3.3.2.5 Trigger In.......................................................................................................................26
3.3.2.6 RS232 GPS...................................................................................................................27
3.3.2.7 LAN (Ethernet).............................................................................................................. 27
3.3.2.8 Li-Ion Battery Pack........................................................................................................27
3.3.2.9 Loudspeaker................................................................................................................. 27
3.3.3 Accessories...................................................................................................................27
3.4 Operating Basics.........................................................................................................30
Contents
3.4.1 Understanding the Display Information......................................................................... 30
3.4.2 Manual Operation..........................................................................................................32
3.4.2.1 Changing Settings and Activating Functions.................................................................32
3.4.2.2 Entering Data................................................................................................................ 32
3.4.2.3 Getting Help.................................................................................................................. 34
3.4.3 Manual Operation from a VNC Viewer..........................................................................36
3.4.4 Remote Control............................................................................................................. 38
4 Measurements and Results.................................................................40
5 Configuring the Input Signal and Measurement Mode.....................43
5.1 Input Signal Settings.................................................................................................. 43
5.2 Receiver Board............................................................................................................44
5.3 Measurement Mode.....................................................................................................45
6 Numeric Measurement Modes............................................................ 46
6.1 ILS Localizer and ILS Glidepath (GP) Modes........................................................... 46
6.1.1 Localizer Basics............................................................................................................ 46
6.1.2 Glide Slope Basics........................................................................................................ 47
6.1.3 ILS Localizer and Glidepath Measurements and Results............................................. 48
6.1.3.1 RF Level and Frequency Display.................................................................................. 49
6.1.3.2 IF Spectrum Preview.....................................................................................................50
4User Manual 1178.6227.02 ─ 05
Page 5

R&S®EVSG1000
6.1.3.3 ILS Localizer and Glidepath Main View.........................................................................51
6.1.3.4 ILS Localizer Distortion View.........................................................................................53
6.1.3.5 ILS Localizer ID Analysis View......................................................................................56
6.1.3.6 ILS Localizer Recording View....................................................................................... 59
6.1.4 ILS Localizer and Glidepath Configuration....................................................................59
6.1.4.1 Channel and Frequency Configuration......................................................................... 60
6.1.4.2 Ampt..............................................................................................................................63
6.1.4.3 Bandwidth (BW)............................................................................................................ 65
6.1.4.4 Setting the Measurement Time (MTime).......................................................................66
6.1.4.5 DDM and SDM Configuration........................................................................................66
6.2 ILS Marker Beacon Mode (Option R&S EVSG-K3)................................................... 67
6.2.1 Basics on Marker Beacons........................................................................................... 68
6.2.2 ILS Marker Beacon Measurements and Results...........................................................68
Contents
6.2.2.1 RF Level and Frequency Display.................................................................................. 69
6.2.2.2 IF Spectrum Preview.....................................................................................................70
6.2.2.3 ILS Marker Beacon Main View......................................................................................71
6.2.2.4 ILS Marker Beacon ID Analysis.................................................................................... 72
6.2.2.5 ILS Marker Beacon Recording View............................................................................. 74
6.2.3 Configuring ILS Marker Beacon Measurements........................................................... 74
6.2.3.1 Setting the Receiver Frequency....................................................................................75
6.2.3.2 Ampt..............................................................................................................................75
6.2.3.3 Setting the Measurement Time (MTime).......................................................................76
6.3 VOR Mode (Option R&S EVSG-K2)............................................................................77
6.3.1 VOR Basics...................................................................................................................77
6.3.1.1 VHF Omni Directional Radio Range (VOR).................................................................. 77
6.3.1.2 VOR Demodulator.........................................................................................................80
6.3.1.3 Phase Notation in VOR Measurements........................................................................ 82
6.3.2 VOR Measurements and Results..................................................................................83
6.3.2.1 RF Level and Frequency Display.................................................................................. 83
6.3.2.2 IF Spectrum Preview.....................................................................................................84
6.3.2.3 VOR Main View.............................................................................................................85
6.3.2.4 VOR Distortion View......................................................................................................87
6.3.2.5 VOR ID Analysis View...................................................................................................88
5User Manual 1178.6227.02 ─ 05
Page 6

R&S®EVSG1000
6.3.2.6 VOR Recording View.................................................................................................... 90
6.3.3 Configuring VOR Measurements.................................................................................. 91
6.3.3.1 Signal Direction............................................................................................................. 92
6.3.3.2 Channel Frequency Configuration (CH FREQ).............................................................92
6.3.3.3 Ampt..............................................................................................................................93
6.3.3.4 Bandwidth (BW)............................................................................................................ 94
6.3.3.5 Setting the Measurement Time (MTime).......................................................................95
6.4 COM Mode (Option R&S EVSG-K6)........................................................................... 95
6.4.1 COM Measurement Results..........................................................................................95
6.4.1.1 RF Level and Frequency Display.................................................................................. 96
6.4.1.2 IF Spectrum Preview.....................................................................................................97
6.4.1.3 COM Main View............................................................................................................ 98
6.4.1.4 COM Recording View....................................................................................................99
Contents
6.4.2 COM Configuration..................................................................................................... 100
6.4.2.1 Channel and Frequency Configuration....................................................................... 100
6.4.2.2 Ampt............................................................................................................................102
6.4.2.3 Bandwidth (BW).......................................................................................................... 103
6.4.2.4 Setting the Measurement Time (MTime).....................................................................104
7 Graphic Measurement Modes...........................................................105
7.1 RF Spectrum Mode (Option R&S EVSG-K10)......................................................... 105
7.1.1 Configuring the Frequency Range.............................................................................. 106
7.1.2 Configuring the Bandwidth.......................................................................................... 107
7.1.3 Configuring the Amplitude (Y-Axis)............................................................................. 108
7.1.4 Configuring the Trace..................................................................................................109
7.2 IF Spectrum Mode (Option R&S EVSG-K10)...........................................................110
7.2.1 Configuring the Frequency Range...............................................................................111
7.2.2 Configuring the Bandwidth.......................................................................................... 112
7.2.3 Configuring the Amplitude (Y-Axis)..............................................................................112
7.2.4 Configuring the Trace..................................................................................................114
7.3 AF Spectrum Mode (Option R&S EVSG-K11)......................................................... 115
7.3.1 Configuring the Frequency Range...............................................................................116
7.3.2 Configuring the Bandwidth.......................................................................................... 117
7.3.3 Configuring the Amplitude (Y-Axis)..............................................................................118
6User Manual 1178.6227.02 ─ 05
Page 7

R&S®EVSG1000
7.3.4 Configuring the Trace..................................................................................................119
7.4 AF Time Domain Mode (Option R&S EVSG-K12)................................................... 120
7.4.1 Configuring the Frequency Range.............................................................................. 122
7.4.2 Configuring the Amplitude (Y-Axis)............................................................................. 122
7.4.3 Configuring the Measurement Time............................................................................123
7.4.4 Configuring the Trigger................................................................................................124
7.4.5 Configuring the Trace..................................................................................................125
8 GBAS/SCAT-I Mode (Options R&S EVSG-K4/-K5)...........................126
8.1 Basics on GBAS and SCAT-I Analysis ...................................................................127
8.1.1 GBAS Specifics...........................................................................................................127
8.1.2 Broadcast Timing Structure.........................................................................................129
8.1.3 Final Approach Segment (FAS) Construction Data.....................................................129
Contents
8.1.4 Time Slot Synchronization via PPS.............................................................................130
8.2 GBAS / SCAT-I Measurement Information.............................................................. 130
8.3 GBAS / SCAT-I Measurement Views and Results...................................................132
8.3.1 Sequence View........................................................................................................... 132
8.3.2 Frame View................................................................................................................. 134
8.3.2.1 Frame Power Vs. Time Diagram.................................................................................135
8.3.2.2 Frame Results Table................................................................................................... 136
8.3.3 Burst View................................................................................................................... 138
8.3.3.1 Slot Power vs. Time Diagram......................................................................................139
8.3.3.2 Slot Results Table....................................................................................................... 140
8.3.4 Constellation View.......................................................................................................141
8.3.5 Message View.............................................................................................................142
8.3.6 Recording View........................................................................................................... 143
8.4 GBAS/ SCAT-I Measurement Configuration............................................................145
8.4.1 View Configuration...................................................................................................... 145
8.4.2 Frequency Configuration.............................................................................................146
8.4.3 Amplitude Configuration..............................................................................................146
8.4.4 Bandwidth Configuration............................................................................................. 147
8.4.5 General Configuration................................................................................................. 147
8.5 Message XML Interface............................................................................................ 148
8.5.1 General Processing.....................................................................................................149
7User Manual 1178.6227.02 ─ 05
Page 8

R&S®EVSG1000
8.5.2 Output Elements and Control Elements......................................................................151
8.5.3 XML File Format Description.......................................................................................153
8.5.4 Format Description of Elements..................................................................................155
8.5.5 Output Elements......................................................................................................... 156
8.5.5.1 Unsigned Type............................................................................................................ 156
8.5.5.2 Signed Type................................................................................................................ 157
8.5.5.3 Longitude Type............................................................................................................158
8.5.5.4 Latitude Type...............................................................................................................159
8.5.5.5 Id Type........................................................................................................................ 159
8.5.5.6 Fixed Type...................................................................................................................160
8.5.5.7 Value Type...................................................................................................................160
8.5.5.8 FEC Type.................................................................................................................... 160
8.5.5.9 CRC Type....................................................................................................................161
Contents
8.5.5.10 List Type......................................................................................................................161
8.5.5.11 Enum Type..................................................................................................................162
8.5.5.12 Dummy Type...............................................................................................................163
8.5.6 Control Elements.........................................................................................................163
8.5.6.1 Link_sel Type.............................................................................................................. 163
8.5.6.2 Loop Type................................................................................................................... 166
8.5.6.3 While Type.................................................................................................................. 166
8.5.7 Auxiliary Elements.......................................................................................................167
8.5.7.1 Fill Type.......................................................................................................................167
9 Power Sensor Support (Option R&S EVSG-K24)............................ 168
10 Using Markers in the Graphical Displays........................................ 170
11 Data Management.............................................................................. 172
11.1 Storing and Recalling Measurement Settings (Preset)......................................... 172
11.1.1 Storage and Recall Functions..................................................................................... 172
11.2 Recording Measurement Data................................................................................. 174
11.2.1 GPS Data Synchronization......................................................................................... 175
11.2.2 I/Q Data Recording and Streaming (R&S EVSG1-K25)..............................................175
11.2.3 Recording Settings......................................................................................................176
11.2.4 Activating Data Recording...........................................................................................178
8User Manual 1178.6227.02 ─ 05
Page 9

R&S®EVSG1000
11.2.5 Analyzing Recorded I/Q Data......................................................................................180
11.3 Creating and Storing Screenshots..........................................................................180
12 Common Instrument Settings...........................................................183
12.1 Audio Output Settings.............................................................................................. 183
12.2 Display....................................................................................................................... 184
12.3 Demodulation Output Settings................................................................................ 186
12.4 Network (Remote) Settings...................................................................................... 186
12.5 System Settings........................................................................................................ 188
12.6 Instrument Configuration and Operating Status Settings.....................................190
12.7 GPS Configuration.................................................................................................... 196
13 Maintenance....................................................................................... 198
13.1 Exchanging an Optional Battery Pack (R&S EVSG-B3)........................................ 198
Contents
14 Remote Commands........................................................................... 200
14.1 Common Instrument and Measurement Setup...................................................... 200
14.1.1 Common Measurement Settings.................................................................................201
14.1.2 Signal Input................................................................................................................. 204
14.1.3 Trigger Settings...........................................................................................................206
14.1.4 Baseband Input........................................................................................................... 206
14.1.5 Result Display Settings............................................................................................... 207
14.1.6 Audio, Demodulation and Output Configuration..........................................................211
14.1.7 Retrieving Instrument Information............................................................................... 215
14.1.8 GPS Data.................................................................................................................... 217
14.1.9 System Settings.......................................................................................................... 222
14.1.10 Calibration................................................................................................................... 225
14.1.11 Network Settings and Remote Operation....................................................................226
14.1.12 Deprecated Commands.............................................................................................. 228
14.2 ILS Localizer (LOC) and Glidepath (GP) Modes..................................................... 229
14.2.1 Configuring the ILS LOC and GP Modes.................................................................... 229
14.2.2 Configuring ILS Localizer Measurements................................................................... 230
14.2.3 Configuring ILS Glidepath Measurements.................................................................. 236
14.2.4 Retrieving ILS Loc and GP Results.............................................................................241
14.2.5 Retrieving ID Results.................................................................................................. 248
9User Manual 1178.6227.02 ─ 05
Page 10

R&S®EVSG1000
14.2.6 Deprecated Commands.............................................................................................. 250
14.3 ILS Marker Beacon (MB) Mode................................................................................ 253
14.3.1 Configuring ILS MB Measurements............................................................................ 253
14.3.2 Retrieving ILS MB Results.......................................................................................... 255
14.3.3 Retrieving ILS MB Identifier Results........................................................................... 257
14.3.4 Deprecated Commands.............................................................................................. 259
14.4 VOR Mode.................................................................................................................. 260
14.4.1 Configuring VOR Measurements................................................................................ 260
14.4.2 Retrieving VOR Results.............................................................................................. 263
14.4.3 Deprecated Commands.............................................................................................. 267
14.5 COM Mode................................................................................................................. 268
14.5.1 Configuring COM Measurements................................................................................268
14.5.2 Retrieving COM Results..............................................................................................272
Contents
14.6 GBAS/ SCAT-I Mode..................................................................................................278
14.6.1 Configuring GBAS/ SCAT-I Measurements.................................................................278
14.6.2 Retrieving GBAS/ SCAT-I Results...............................................................................282
14.7 RF Spectrum Mode................................................................................................... 289
14.7.1 Configuring RF Spectrum Measurements...................................................................290
14.7.2 Retrieving RF Spectrum Results.................................................................................294
14.8 IF Spectrum Mode..................................................................................................... 294
14.8.1 Configuring IF Spectrum Measurements.................................................................... 295
14.8.2 Retrieving IF Spectrum Results.................................................................................. 298
14.9 AF Spectrum Mode................................................................................................... 299
14.9.1 Configuring AF Spectrum Measurements................................................................... 299
14.9.2 Retrieving AF Spectrum Results................................................................................. 304
14.10 AF Time Domain Mode..............................................................................................305
14.10.1 Configuring AF Time Domain Measurements............................................................. 305
14.10.2 Retrieving RF Spectrum Results.................................................................................308
14.11 Data Management..................................................................................................... 309
14.11.1 Data Recording........................................................................................................... 309
14.11.2 Data Streaming........................................................................................................... 314
14.11.3 Results for Data Streaming......................................................................................... 316
14.11.3.1 ILS LOC Mode............................................................................................................ 316
10User Manual 1178.6227.02 ─ 05
Page 11

R&S®EVSG1000
14.11.3.2 ILS GP Mode...............................................................................................................317
14.11.3.3 ILS MB Mode.............................................................................................................. 318
14.11.3.4 VOR Mode.................................................................................................................. 319
14.11.3.5 COM Mode..................................................................................................................320
14.11.3.6 GBAS Mode................................................................................................................ 320
14.12 Information on Commands...................................................................................... 321
Annex.................................................................................................. 322
A ILS Channel Frequency List..............................................................322
B VOR Channel Frequency List............................................................324
C References..........................................................................................326
D Format Description of GBAS and SCAT-I Data................................327
Contents
E Contacting Customer Support..........................................................333
List of Commands..............................................................................334
Index....................................................................................................345
11User Manual 1178.6227.02 ─ 05
Page 12

R&S®EVSG1000
Contents
12User Manual 1178.6227.02 ─ 05
Page 13

R&S®EVSG1000
1 For Your Safety
For Your Safety
Intended use
The R&S EVSG1000 is a portable level and modulation analyzer especially for maintenance and servicing of ILS, VOR and marker beacon ground stations and analyzing
ATC COM signals. High Accuracy and measurement speed, robust design and the
integrated battery make the R&S EVSG1000 ideal for high-precision, network-independent measurements.
The product documentation helps you to use the R&S EVSG1000 safely and efficiently.
Follow the instructions provided here and in the "Basic Safety Instructions" brochure.
Keep the product documentation nearby and offer it to other users.
Where do I find safety information?
Safety information is part of the product documentation. It warns you about the potential dangers and gives instructions how to prevent personal injuries or damage caused
by dangerous situations. Safety information is provided as follows:
●
The printed "Basic Safety Instructions" brochure provides safety information in
many languages and is delivered with the R&S EVSG1000.
●
Throughout the documentation, safety instructions are provided when you need to
take care during setup or operation.
13User Manual 1178.6227.02 ─ 05
Page 14

R&S®EVSG1000
2 Documentation Overview
2.1 Getting Started Manual
2.2 User Manuals and Help
Documentation Overview
Data Sheets and Brochures
This section provides an overview of the R&S EVSG1000 user documentation. You
find it on the product page at:
www.rohde-schwarz.com/manual/EVSG1000
Introduces the R&S EVSG1000 and describes how to set up and start working with the
product. A printed version is delivered with the instrument.
Contains the description of all instrument modes and functions. It also provides an
introduction to remote control, a complete description of the remote control commands
with programming examples, and information on maintenance, instrument interfaces
and error messages. Includes the contents of the getting started manual.
The contents of the user manual are also available as online help on the
R&S EVSG1000.
2.3 Basic Safety Instructions
Contains safety instructions, operating conditions and further important information.
The printed document is delivered with the instrument.
2.4 Data Sheets and Brochures
The data sheet contains the technical specifications of the R&S EVSG1000. It also lists
the firmware applications and their order numbers, and optional accessories.
The brochure provides an overview of the instrument and deals with the specific characteristics.
See www.rohde-schwarz.com/brochure-datasheet/evsg/
14User Manual 1178.6227.02 ─ 05
Page 15
R&S®EVSG1000
2.5 Release Notes and Open Source Acknowledgment
Documentation Overview
Release Notes and Open Source Acknowledgment (OSA)
(OSA)
The release notes list new features, improvements and known issues of the current
firmware version, and describe the firmware installation.
The open source acknowledgment document provides verbatim license texts of the
used open source software.
See www.rohde-schwarz.com/software/EVSG1000.
15User Manual 1178.6227.02 ─ 05
Page 16
R&S®EVSG1000
3 Getting Started
3.1 Key Features
Getting Started
Preparing for Use
The R&S EVSG1000 offers the following key features:
●
Detailed analysis of ILS, VOR and Marker Beacon ground measurements (based
on ICAO Doc. 8071 and ICAO Annex 10)
●
Spectrum preview and detailed signal analysis in frequency and time range
●
Dynamic measurements up to 100 measurements per second in high measurement rate modus
●
Parallel course and clearance signal analysis in two-frequency systems (ILS)
●
Simple remote operation via standard interfaces
●
Software options for specific use cases
●
Integrated data recording
3.2 Preparing for Use
Risk of injury due to disregarding safety information
Observe the information on appropriate operating conditions provided in the data sheet
to prevent personal injury or damage to the instrument. Read and observe the basic
safety instructions provided with the instrument, in addition to the safety instructions in
the following sections. In particular:
●
Do not open the instrument casing.
Risk of instrument damage due to inappropriate operating conditions
Specific operating conditions are required to ensure accurate measurements and to
avoid damage to the instrument. Observe the information on appropriate operating
conditions provided in the basic safety instructions and the instrument's data sheet.
3.2.1 Unpacking and Checking the R&S EVSG1000
Check the equipment for completeness using the delivery note and the accessory lists
for the various items. Check the instrument for any damage. If there is damage, imme-
16User Manual 1178.6227.02 ─ 05
Page 17
R&S®EVSG1000
Getting Started
Preparing for Use
diately contact the carrier who delivered the instrument. Make sure not to discard the
box and packing material.
Packing material
Retain the original packing material. If the instrument needs to be transported or shipped later, you can use the material to protect the control elements and connectors.
Risk of instrument damage during transportation and shipment
Insufficient protection against mechanical and electrostatic effects during transportation
and shipment can damage the instrument.
●
Always make sure that sufficient mechanical and electrostatic protection is provided.
●
When shipping an instrument, use the original packaging. If it is not available, allow
for sufficient padding to prevent the instrument from moving around inside the box.
Pack the instrument in antistatic wrap to protect it from electrostatic charging.
●
Secure the instrument to prevent any movement and other mechanical effects during transportation.
Accessory List
The instrument comes with the following accessories:
●
AC/DC power supply with cable
●
Printed Getting Started manual
3.2.2 Setting Up the Instrument
The R&S EVSG1000 can be operated in a variety of places without detrimental effects
on its features. Even the movement caused by transportation or mobile use does not
impair its functioning.
Risk of instrument damage due to environmental conditions
The R&S EVSG1000 was designed to provide a protected environment for the measurement setup. However, observe the allowed environmental conditions concerning
temperature, humidity and mechanical stress described in the R&S EVSG1000 data
sheet and the general safety instructions to avoid damage to the devices.
Ensure that the airflow perforations are unimpeded.
17User Manual 1178.6227.02 ─ 05
Page 18
R&S®EVSG1000
3.2.3 Connecting the Power Supply
Getting Started
Preparing for Use
To ensure high mobility and flexibility while using the R&S EVSG1000, it is equipped
with a DC power supply connector on the rear panel of the instrument. DC power can
be supplied by the installed battery, the provided power supply unit, or from appropriate
external DC power sources.
Risk of instrument damage due to excess voltage
The R&S EVSG1000 must be operated only on DC power with a voltage of 10 V DC to
28 V DC and a current of 3.0 A.
The provided DC power supply unit must only be plugged into a two-pin grounded
socket!
Use the provided AC/DC power supply unit to operate the R&S EVSG1000 on a 230 V
AC power supply.
3.2.3.1 Connecting the Provided DC Power Supply
Risk of electric shock!
When connecting to an AC power supply, only the supplied AC/DC power supply connector must be used!
Connect the R&S EVSG1000 to the provided AC/DC power supply as follows:
1. Connect the DC connector on the provided AC/DC power supply unit to the
"POWER" connector on the back of the R&S EVSG1000 (see Chapter 3.3.2.1,
"Power Supply", on page 26).
2. Connect the power cable to the AC/DC power supply and to a main power socket.
The green operating LED of the AC/DC power supply connector lights up.
3.2.3.2 Connecting an External DC Power Source
The R&S EVSG1000 can be operated directly from an external DC power source (10
V DC to 28 V DC).
18User Manual 1178.6227.02 ─ 05
Page 19
R&S®EVSG1000
Getting Started
Preparing for Use
Risk of instrument damage due to insecure power supply connection
If the connection between the instrument and the external DC power source is not protected against excessive current, a short-circuit can damage the instrument or power
supply unit.
When connecting the R&S EVSG1000 to the power supply, ensure the following prerequisites are met:
●
Insert a 3 AT fuse
●
Use a 3-pin XLR connection cable
●
If the cable must be extended, ensure the entire cable has a cross-section of at
least 1.5 mm
2
Connect the R&S EVSG1000 to an external DC power source as follows:
1. Connect the XLR connection cable to the "POWER" connector on the back of the
instrument (see Chapter 3.3.2.1, "Power Supply", on page 26).
2. Connect the XLR connection cable to the DC power supply.
Risk of electric shock
Insufficient insulation and exceeding the current limitation of external power supplies
for safety extra-low DC voltage (SELV) can lead to electric shock.
Be sure to meet the requirements for reinforced/double insulation in accordance with
DIN/EN/IEC 61010 (UL 3111, CSA C22.2 No. 1010.1) or DIN/EN/IEC 60950 (UL 1950,
CSA C22.2 No. 950). Provide current limitation in accordance with DIN EN 61010-1
Appendix F2.1.
3.2.3.3 Using an Optional Battery Pack (R&S EVSG-B3)
As an alternative to the fixed AC or DC power supply, the R&S EVSG1000 can be
operated by a battery pack if the R&S EVSG-B2 and R&S EVSG-B3 options are installed. If the battery pack is installed and no DC power is supplied, the R&S EVSG1000
automatically switches to battery operation (during operation).
If the battery option was ordered together with the instrument, the R&S EVSG1000
comes with the battery management and battery pack already installed.
19User Manual 1178.6227.02 ─ 05
Page 20
R&S®EVSG1000
3.2.4 Connecting Devices for Signal Input and Output
Getting Started
Preparing for Use
The battery pack must be charged before it is used the first time. A new battery pack or
a battery pack which has not been used for a longer time attains full capacity after several charge/ discharge cycles.
Charge the battery pack at a constant ambient temperature between +0 °C and
+40 °C. If the battery temperature rises above +53 °C, charging is interrupted until the
temperature drops below +45 °C. Large temperature variations can also cause the
charger to be switched off too early.
Use only the original battery pack R&S EVSG-B3 (1329.8821.02).
If the instrument is connected to the provided AC/DC power supply or to an external
DC power supply with more than 12 V DC, the internal battery is automatically charged
regardless whether the instrument is switched on or off.
1. Connect the RF input connector ("RX 1 IN"/"RX 2 IN") with the receiving antenna
(see Chapter 3.3.1.3, "RX1 IN / RX 2 IN", on page 22).
2. Optionally, connect the power supply for an active receiving antenna (see Chap-
ter 3.3.1.6, "12 V DC Out", on page 22).
3. Optionally, connect the GPS receiver (see Chapter 3.3.2.6, "RS232 GPS",
on page 27).
4. Optionally, connect a headset (see Chapter 3.3.1.5, "AF Out", on page 22).
3.2.5 Switching the R&S EVSG1000 On and Off
To switch the instrument on or off, press the [Power] key (see Chapter 3.3.1.1, "Power
Key", on page 22).
When the instrument is switched on, the power LED lights up.
If the instrument is operated by the provided DC power supply or by an external DC
power supply with more than 12 V DC, the internal battery is charged regardless
whether the instrument is switched on or off.
Starting Process
The boot process of the R&S EVSG1000 takes about 30 seconds. Then the instrument automatically starts the measurement mode used before the instrument was
switched off.
If valid data for automatic calibration is not available, the message "UNCAL" is displayed in the status line.
20User Manual 1178.6227.02 ─ 05
Page 21

R&S®EVSG1000
3.3 Instrument Tour
3.3.1 Front Panel
Getting Started
Instrument Tour
It is recommended that you perfom an auto-calibration every 2 months or if the difference of the environment temperature changes by more than 10 °C.
7
2
1
Figure 3-1: R&S EVSG1000 - Front panel view
1 = Power key
2 = Display
3 = RX 1 IN / RX 2 IN
4 = USB connectors
5 = AF Out
6 = 12 V DC Out
7 = System keys
8 = Softkeys
9 = Function keys
10 = Keypad
11 = Rotary Knob
12 = Navigation keys
8
9
10 11
12
3 4 5 6 3
● Power Key...............................................................................................................22
● Display.................................................................................................................... 22
● RX1 IN / RX 2 IN.....................................................................................................22
● USB.........................................................................................................................22
● AF Out.....................................................................................................................22
● 12 V DC Out............................................................................................................22
● System Keys........................................................................................................... 22
● Softkeys.................................................................................................................. 23
● Function Keys......................................................................................................... 23
21User Manual 1178.6227.02 ─ 05
Page 22
R&S®EVSG1000
3.3.1.1 Power Key
3.3.1.2 Display
3.3.1.3 RX1 IN / RX 2 IN
Getting Started
Instrument Tour
● Keypad....................................................................................................................24
● Rotary Knob............................................................................................................ 24
● Navigation Keys...................................................................................................... 25
The [Power] key starts up and shuts down the R&S EVSG1000.
The TFT color display shows all measurement and configuration details.
Use the RX inputs to connect a receiving antenna (max. +13 dBm) to the
R&S EVSG1000 for RF signal input.
"RX 2 In" is supplied as an option (R&S EVSG-B1).
This option allows you to perform two independent measurements simultaneously, for
example on different frequencies. This capability is vital in flight inspection systems
because localizer and glidepath signals must be measured at the same time. An additional application required in flight inspection systems is the parallel measurement of
two different VOR stations.
3.3.1.4 USB
The front panel provides two female USB connectors (USB-A, 2.0 standard) to connect
a memory device.
The memory device is used to store and reload instrument settings, to provide software
updates and to export measurement data.
3.3.1.5 AF Out
Connector for a headset with a 3.5 mm jack plug
3.3.1.6 12 V DC Out
DC output for an active receiving antenna.
3.3.1.7 System Keys
System keys set the instrument to a predefined state, change basic settings, and provide print and display functions.
22User Manual 1178.6227.02 ─ 05
Page 23
R&S®EVSG1000
3.3.1.8 Softkeys
Getting Started
Instrument Tour
Table 3-1: System keys
System key Assigned functions
[Preset] Opens the "Preset" menu.
Creates screenshot and stores it internally.
[Screenshot]
[Audio] Opens the "Audio" menu.
[Display] Opens the "Display" menu.
[Help] Opens the online help.
[Setup] Opens the "Setup" menu containing general instrument settings.
[Mode] Opens the measurement mode selection (for example ILS LOC,
VOR, COM)
Softkeys are virtual keys provided by the software. Thus, more functions can be provided than those that can be accessed directly via the function keys on the instrument.
Softkeys are dynamic, i.e. depending on the selected function key, a different list of
softkeys is displayed on the right side of the screen. A list of softkeys for a certain function key is also called a menu. Softkeys can either perform a specific function or open
a dialog box.
3.3.1.9 Function Keys
Function keys provide access to the most common measurement settings and functions.
Table 3-2: Function keys
Function key Assigned functions
[CH Freq] Sets the center frequency and the start and stop frequencies
[Ampt] Sets the reference level, the displayed dynamic range, and the RF
[BW] Sets the resolution bandwidth
[Meas] Provides the measurement settings for the active measurement mode
[Config] Configures measurements and data input and output
[MTime] Configures the measurement time
attenuation for the level display
[Marker] Sets and positions the absolute and relative measurement markers
(markers and delta markers)
[Mkr]-> Provides search functions for the measurement markers (maximum/
minimum of the trace)
Sets the center frequency to the current marker frequency
[Mkr Fct] Provides further marker functions, such as removing all markers
23User Manual 1178.6227.02 ─ 05
Page 24
R&S®EVSG1000
3.3.1.10 Keypad
Getting Started
Instrument Tour
Function key Assigned functions
[Record] Starts and stops the continuous data recording.
[Trigger] Opens the Trigger Menu.
[Single] Saves a single dataset.
The keypad is used to enter numeric parameters, including the corresponding units. It
contains the following keys.
Type of key Description
Decimal point Inserts a decimal point "." at the cursor position.
Sign key Changes the sign of a numeric parameter. In the
case of an alphanumeric parameter, inserts a "-" at
the cursor position.
Unit keys
(GHz/-dBm MHz/dBm, kHz/dB, Hz/dB etc.)
ESC Closes all kinds of dialog boxes, if the edit mode is
ENTER
Adds the selected unit to the entered numeric value
and complete the entry.
In the case of level entries (e.g. in dB) or dimensionless values, all units have the value "1" as multiplying factor. Thus, they have the same function as an
ENTER key.
not active. Quits the edit mode, if the edit mode is
active. In dialog boxes that contain a "Cancel" button it activates that button.
For "Edit" dialog boxes the following mechanism is
used:
●
If data entry has been started, it retains the
original value and closes the dialog box.
●
If data entry has not been started or has been
completed, it closes the dialog box.
If an alphanumeric entry has already been started,
this key deletes the character to the left of the cursor.
●
Concludes the entry of dimensionless entries.
The new value is accepted.
●
With other entries, this key can be used instead
of the "Hz/dB" unit key.
●
In a dialog box, selects the default or focused
element.
3.3.1.11 Rotary Knob
The rotary knob has several functions:
●
For numeric entries: increments (clockwise direction) or decrements (counterclockwise direction) the instrument parameter at a defined step width
●
In lists: toggles between entries
24User Manual 1178.6227.02 ─ 05
Page 25
R&S®EVSG1000
3.3.1.12 Navigation Keys
Getting Started
Instrument Tour
●
For markers, limit lines, and other graphical elements on the screen: moves their
position
●
For active scroll bars: moves the scroll bar vertically
●
For dialog boxes: Acts like the ENTER key when pressed
While you turn the rotary knob, the settings are applied immediately, and the results
are updated accordingly.
The navigation keys can be used alternatively to the rotary knob to navigate through
dialog boxes, diagrams or tables.
●
Arrow Up/Arrow Down Keys
The <arrow up> or <arrow down> keys do the following:
– For numeric entries: increments (Arrow Up) or decrements (Arrow Down) the
instrument parameter at a defined step width
– In a list: scrolls forward and backward through the list entries
– In a table: moves the selection bar vertically
– In windows or dialog boxes with a vertical scroll bar: moves the scroll bar
●
Arrow Left/Arrow Right Keys
The <arrow left> or <arrow right> keys do the following:
– In an alphanumeric edit dialog box, move the cursor.
– In a list, scroll forward and backward through the list entries.
– In a table, move the selection bar horizontally.
– In windows or dialog boxes with horizontal scroll bar, move the scroll bar.
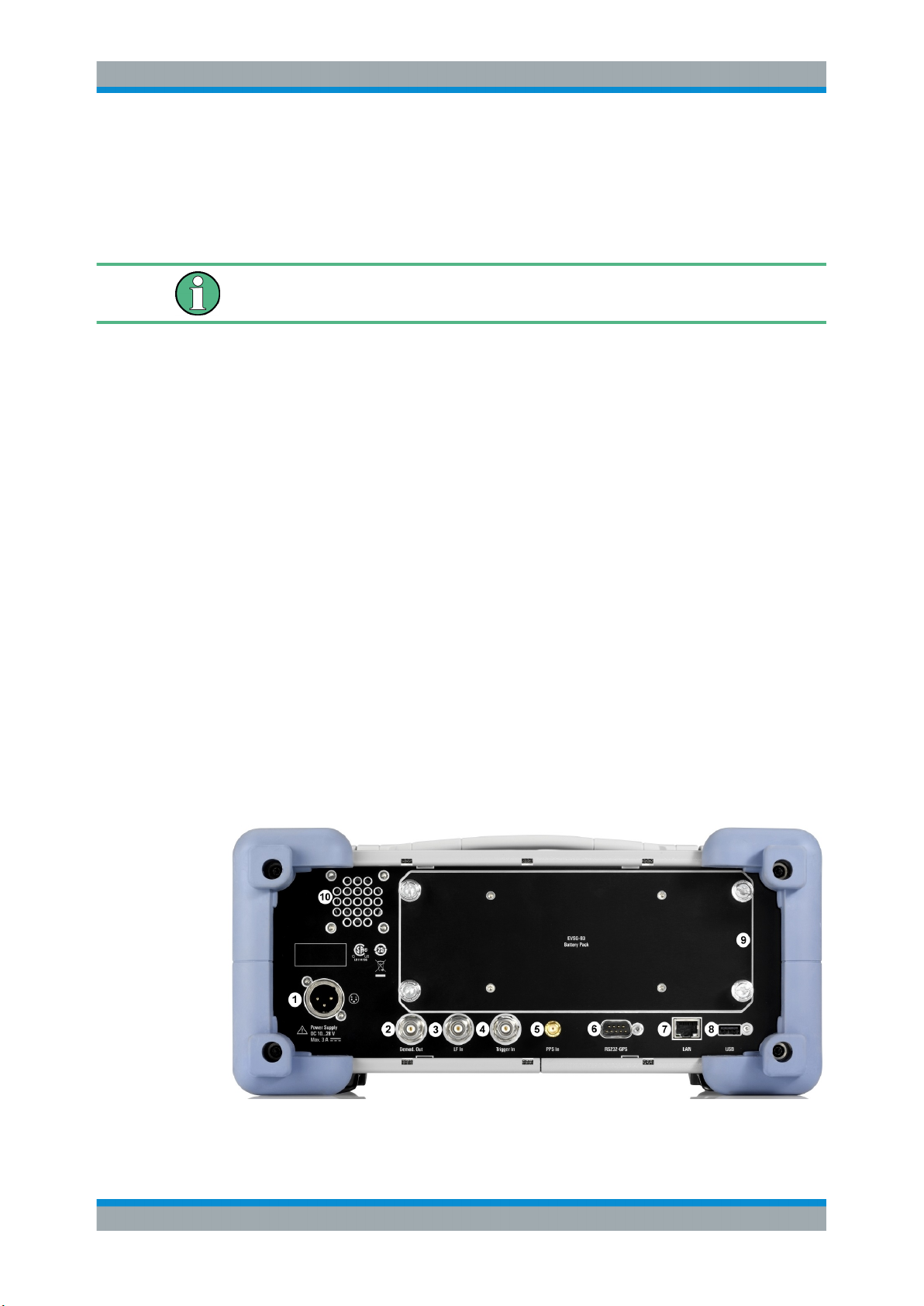
3.3.2 Rear Panel
Figure 3-2: R&S
EVSG1000 - Rear panel view
25User Manual 1178.6227.02 ─ 05
Page 26

R&S®EVSG1000
Getting Started
Instrument Tour
1 = Power Supply
2 = Demod Out
3 = LF In
4 = Trigger In
5 = PPS In
6 = RS232-GPS
7 = LAN
8 = USB
9 = Li-Ion battery pack
10 = Loudspeaker
● Power Supply..........................................................................................................26
● Demod Out..............................................................................................................26
● LF In (Baseband Input)........................................................................................... 26
● PPS In.....................................................................................................................26
● Trigger In.................................................................................................................26
● RS232 GPS.............................................................................................................27
● LAN (Ethernet)........................................................................................................ 27
● Li-Ion Battery Pack..................................................................................................27
● Loudspeaker........................................................................................................... 27
3.3.2.1 Power Supply
XLR connector for an external DC power source (10 V DC to 28 V DC)
See Chapter 3.2.3, "Connecting the Power Supply", on page 18.
3.3.2.2 Demod Out
Outputs a demodulated signal for connected devices, for example an oscilloscope
3.3.2.3 LF In (Baseband Input)
BNC socket, 50 Ω/20kΩ to input a baseband signal to the R&S EVSG1000 for further
analysis of typical AF parameters
3.3.2.4 PPS In
Provides a PPS signal from an external GPS device for precise synchronization during
data logging
3.3.2.5 Trigger In
Provides an external trigger for data recording.
26User Manual 1178.6227.02 ─ 05
Page 27
R&S®EVSG1000
3.3.2.6 RS232 GPS
3.3.2.7 LAN (Ethernet)
3.3.2.8 Li-Ion Battery Pack
Getting Started
Instrument Tour
2-port, 9-pin Sub-D connector for a GPS receiver providing NMEA protocol data. The
NMEA protocol data is displayed and stored with the recorded data.
Through the LAN connection (Fast Ethernet), all functions of the R&S EVSG1000 can
be remotely operated. The LAN connection can also be used to stream measurement
data (TCP port 8000; for I/Q data: 8001 (RX1) or 8002 (RX2)). IP Addresses and subnet mask are defined in the setup menu. The data transfer rate is 100 Mbit/s.
With the Li-Ion battery pack (options (R&S EVSG-B2 and R&S EVSG-B3), the
R&S EVSG1000 can be operated independently of an AC or DC power supply.
The charging circuit is protected by an overload protection and an overheating protection.
Generally, the internal battery pack can be charged during operation with the power
supply or with an external voltage supply providing more than 12 V DC. Note, however, that charging can take longer when the instrument is in use.
3.3.2.9 Loudspeaker
Provides the AF output also available via the Chapter 3.3.1.5, "AF Out", on page 22
headphone connector.
3.3.3 Accessories
Following accessories are available for the operation of the R&S EVSG1000.
●
Weather protection bag (R&S EVSG-Z1)
The weather protection bag has a transparent cover that allows the
R&S EVSG1000 to be used in the field even under adverse weather conditions.
The front pocket can be used for transporting accessories such as the external
power supply.
27User Manual 1178.6227.02 ─ 05
Page 28

R&S®EVSG1000
Figure 3-3: Weather protection bag
●
Rugged Transport case (R&S EVSG-Z2)
It is a hard-top case with trolley functionality.
Getting Started
Instrument Tour
Figure 3-4: Transport Case
●
ILS / VOR Dipole Antenna (R&S EVS-Z3)
The lightweight design of the ILS/VOR dipole antenna and its compact size makes
this antenna ideal for mobile measurements in the field. The antenna comes with
two sets of rods of different lengths to support the two frequency ranges. The telescopic mast can be extended to 3.1 m.
28User Manual 1178.6227.02 ─ 05
Page 29

R&S®EVSG1000
Getting Started
Instrument Tour
Figure 3-5: ILS / VOR Dipole Antenna
●
Antenna bag (R&S EVS-Z4)
The carrying bag allows you to transport all the antenna elements and the telescopic mast safely.
Figure 3-6: Antenna bag
●
Display protection cover (R&S EVS-Z6)
The protective hard cover protects the front panel during transport.
Figure 3-7: Display protection cover
29User Manual 1178.6227.02 ─ 05
Page 30

R&S®EVSG1000
3.4 Operating Basics
Getting Started
Operating Basics
●
19''-adapter (R&S EVSG-Z7)
This option is required for the mounting of the R&S EVSG1000 in a 19'' rack (e.g.
in a measurement vehicle).
The R&S EVSG1000 is designed for ground inspection and is thus optimized for manual operation, via the graphical user interface.
Nevertheless, the instrument can also be controlled remotely, either by executing predefined commands, or by simulating the user interface on a remotely connected
device.
This chapter provides an overview on how to work with the R&S EVSG1000. It
describes what kind of information is displayed on the screen and how to operate the
R&S EVSG1000 manually and remotely.
3.4.1 Understanding the Display Information
The following figure shows a typical screen display on the R&S EVSG1000. All different screen elements are labeled. They are explained in more detail in the following
sections.
2
3
1
Figure 3-8: R&S
4
EVSG1000 - GUI Overview
30User Manual 1178.6227.02 ─ 05
Page 31

R&S®EVSG1000
Getting Started
Operating Basics
1 = Softkeys to edit settings and activate functions
2 = Measurement settings area (numeric modes only)
3 = Measurement result area
4 = Status bar
Softkeys
Softkeys are virtual function keys whose actual function is defined by the software,
depending on the currently selected measurement mode or key, or both.
In some cases, more functions are available than softkeys can be displayed at the
same time. In this case, a second menu of functions is available, indicated by "1/2" and
"2/2" beneath the softkeys in the display. To switch between the two menus of softkey
functions, press the "More softkeys" key beneath the softkeys on the front panel of the
R&S EVSG1000.
Softkeys can perform a function directly, or open a dialog or submenu with further settings and functions. Some softkeys are directly associated with an input field in the
measurement settings area of the window. If the softkey shows a vertical blue line at
the edge, you can edit the value of the corresponding setting directly in the measurement settings area of the window. If the blue line is not shown, the setting is read-only.
To toggle between the edit mode and read-only mode, select the softkey again.
Figure 3-9: Softkey with an associated input field
Measurement settings and results area
During a measurement, the available settings are displayed at the top of the screen;
the measurement results at the bottom. If a general instrument setting or data management function is selected, the settings and information are displayed in the main part of
the screen.
Which settings and results are displayed depends on the current measurement or
instrument function. See the following chapters for details:
●
Chapter 4, "Measurements and Results", on page 40
●
Chapter 11, "Data Management", on page 172
●
Chapter 9, "Power Sensor Support (Option R&S EVSG-K24)", on page 168
●
Chapter 12, "Common Instrument Settings", on page 183
Status bar
The status bar at the bottom of the screen contains information on the operating status
of the instrument.
●
Current list of data recording and size of this list
(See Chapter 11.2, "Recording Measurement Data", on page 174)
31User Manual 1178.6227.02 ─ 05
Page 32

R&S®EVSG1000
3.4.2 Manual Operation
3.4.2.1 Changing Settings and Activating Functions
Getting Started
Operating Basics
●
Local or Remote Operation (see Chapter 3.4.4, "Remote Control", on page 38)
●
Battery status and charge status (in %)
(See Chapter 12.6, "Instrument Configuration and Operating Status Settings",
on page 190)
This chapter describes how to operate the R&S EVSG1000 directly on the instrument,
using graphical interaction methods. During manual operation, the R&S EVSG1000
display indicates "Local" in the status bar.
All functions available on the R&S EVSG1000 can be accessed using the keys on the
front panel of the instrument. Some keys provide a softkey menu on the display with
further functions and settings.
1. Select a key on the front panel of the instrument to activate a function directly, or to
display a softkey menu.
2. Select the softkey for the setting or function as required.
If necessary, select the "More softkeys" key to switch to the second softkey menu.
The function is activated, or a new window is displayed to view or change specific
settings.
3. To set the focus on a specific setting in the displayed window, scroll through the
individual settings by turning the rotary knob or pressing the Up and Down arrow
keys on the front panel (see Chapter 3.3.1.12, "Navigation Keys", on page 25).
4. Scroll through the available setting values by turning the rotary knob or pressing
the Up and Down arrow keys on the front panel, or enter a numeric or alphanumeric value as described in Chapter 3.4.2.2, "Entering Data", on page 32.
Note: While you turn the rotary knob, the settings are applied immediately. If you
enter a value using the keypad, you must confirm the setting before the settings
are applied.
5. Confirm the new setting and remove the focus by pressing the rotary knob or the
[ENTER] key on the front panel.
3.4.2.2 Entering Data
You enter data in input fields using elements provided by the front panel, e.g. the keypad, rotary knob, or navigation keys.
32User Manual 1178.6227.02 ─ 05
Page 33

R&S®EVSG1000
Getting Started
Operating Basics
Entering numeric parameters
If a field requires numeric input, the keypad provides only numbers.
1. Enter the parameter value using the keypad, or change the currently used parameter value by turning the rotary knob or pressing the Up or Down arrow keys.
2. After entering the numeric value via keypad, press the corresponding unit key.
The unit is added to the entry.
3. If the parameter does not require a unit, confirm the entered value by pressing the
[ENTER] key or any of the unit keys.
Entering numbers and (special) characters via the keypad
If a field requires alphanumeric input, use the keypad on the front panel of the
R&S EVSG1000. Every alphanumeric key represents several characters and one number. The decimal point key (.) represents special characters, and the sign key (-) toggles between capital and small letters. For the assignment refer to Table 3-3.
1. Press the key once to enter the first possible value.
All characters available via this key are displayed.
2. To choose another value provided by this key, press the key again, until your
desired value is displayed.
3. With every key stroke, the next possible value of this key is displayed. If all possible values have been displayed, the series starts with the first value again. For
information on the series refer to Table 3-3.
4. To change from capital to small letters and vice versa, press the sign key (-).
5. When you have chosen the desired value, wait for 2 seconds (to use the same key
again), or start the next entry by pressing another key.
Entering a blank
► Press the "0" key and wait 2 seconds.
Correcting an entry
1. Using the arrow keys (see Chapter 3.3.1.12, "Navigation Keys", on page 25), move
the cursor to the right of the entry you want to delete.
2. Press the [BACK] key.
The entry to the left of the cursor is deleted.
3. Enter your correction.
Completing the entry
► Press the [ENTER] key or the rotary knob.
For numeric values, the default unit is appended to the numeric input.
33User Manual 1178.6227.02 ─ 05
Page 34

R&S®EVSG1000
Getting Started
Operating Basics
To enter a value using a different unit, select the corresponding key.
Aborting the entry
► Press the [ESC] key.
The previous entry is restored.
Table 3-3: Keys for alphanumeric parameters
Key name
(upper inscription)
7 7 µ Ω ° € ¥ $ ¢
8 A B C 8 Ä ÆÅ Ç
9 D E F 9 É
4 G H I 4
5 J K L 5
6 M N O 6 Ň Ö
1 P Q R S 1
2 T U V 2 Ü
3 W X Y Z 3
0 <blank> 0 – @ + / \ < > = % &
. . * : _ , ; " ' ? ( ) #
– <toggles between capital and small letters>
3.4.2.3 Getting Help
Series of (special) characters and number provided
If any questions or problems concerning the R&S EVSG1000 arise, an online help system is provided on the instrument and can be consulted at any time.
Displaying the online help system on the instrument
1. Press the [Help] key on the front panel.
34User Manual 1178.6227.02 ─ 05
Page 35

R&S®EVSG1000
Getting Started
Operating Basics
2. Press [Enter] to display the user manual contents.
35User Manual 1178.6227.02 ─ 05
Page 36

R&S®EVSG1000
Getting Started
Operating Basics
Navigating in the help system
To move up and down
► Use the arrow keys.
To switch between areas
► Press the Field left and Field right keys.
VNC:
Press the [PAGE UP] and [PAGE DOWN] keys.
To follow a link
► Press [Enter].
To exit the online help and return to the firmware view
► Press [ESC].
3.4.3 Manual Operation from a VNC Viewer
As an alternative to operating the R&S EVSG1000 directly on the instrument, you can
perform the same tasks from a connected PC using a keyboard. You merely require a
VNC viewer application, of which a variety is available on the Internet free of charge.
36User Manual 1178.6227.02 ─ 05
Page 37

R&S®EVSG1000
Getting Started
Operating Basics
Using a VNC viewer application, you simply connect to the instrument, defined by its IP
address. The display of the R&S EVSG1000 is shown on the control PC. The keys and
other graphical user interface elements are operated using associated keyboard shortcuts on the connected keyboard.
Operation via VNC is not possible during remote control (indicated by "Remote" in the
status bar). To switch from remote control to manual operation, press [ESC].
Keyboard commands for operation via a VNC viewer
Keyboard Commands (VNC Viewer) shows the mapping between the keyboard short-
cut and the interface element on the R&S EVSG1000.
Table 3-4: Keyboard Commands (VNC Viewer)
Keyboard Usage
y Preset
c Audio
v Display
b Help
n Setup
m Mode
z Undo
r Redo
PAGE UP Field right
PAGE DOWN Field left
x Screenshot
a Meas
s Config
F7 Softkey 7
F6 Softkey 6
F5 Softkey 5
F4 Softkey 4
F3 Softkey 3
F2 Softkey 2
F1 Softkey 1
k Trigger
l Single
37User Manual 1178.6227.02 ─ 05
Page 38

R&S®EVSG1000
Getting Started
Operating Basics
Keyboard Usage
ESC ESC
0 0
1 1
4 4
7 7
q CH/FREQ
d MTime
BACKSPACE Back
ENTER Enter
. .
2 2
5 5
8 8
w Ampt
F9 Hz
3 3
6 6
9 9
e BW (Bandwidth)
F10 kHz
F11 MHz
F12 GHz
p Record
i Marker
3.4.4 Remote Control
You can control the R&S EVSG1000, including data transfer, remotely from a PC using
the LAN connection (Fast Ethernet).
You define the IP address and subnet mask in the "Setup" menu.
38User Manual 1178.6227.02 ─ 05
Page 39

R&S®EVSG1000
Getting Started
Operating Basics
Remote control is performed using predefined remote commands which are sent from
the control PC to the R&S EVSG1000. The R&S EVSG1000 can also return queried
data to the control PC.
For details on the available remote commands, see Chapter 14, "Remote Commands",
on page 200.
While in remote control, the R&S EVSG1000 display indicates "Remote" in the status
bar. During remote control, the instrument is locked for manual operation via VNC. To
return to manual operation, press [ESC].
39User Manual 1178.6227.02 ─ 05
Page 40

R&S®EVSG1000
4 Measurements and Results
Measurements and Results
The R&S EVSG1000 provides both numerical and graphical results, depending on the
current measurement task.
Different measurement tasks are performed in individual measurement modes, some
of which are optional. The individual measurement modes are described in detail in the
subsequent chapters of this documentation.
If an optional second receiver board (R&S EVSG-B2) is installed, each receiver board
can be configured to perform different measurement tasks. Thus, you can perform two
different measurements on the same input signal simultaneously. You must then select
the receiver board whose results are displayed in the display settings (see "RX Unit 1 /
RX Unit 2" on page 184).
Figure 4-1: Measurement mode selection
Measurement modes with numerical results
The following measurement modes provide numerical results:
●
ILS LOC mode - determines localizer signal parameters
●
ILS GP mode - determines glidepath signal parameters
●
ILS MB mode - determines marker beacon signal parameters
●
VOR mode (R&S EVSG-K2) - determines modulation and signal parameters, as
well as voice identifier parameters
40User Manual 1178.6227.02 ─ 05
Page 41

R&S®EVSG1000
Measurements and Results
●
COM (R&S EVSG-K6) - determines signal parameters from VHF/UHF communication channels
Measurement modes with graphical results
The following measurement modes provide graphical results:
●
RF Spectrum mode (R&S EVSG-K10) - displays the power vs. frequency diagram
(spectrum) for a variable frequency range of the input signal
●
IF Spectrum mode (R&S EVSG-K10) - displays an enlarged view of the spectrum
for a fixed frequency of the input signal
●
AF Spectrum mode (R&S EVSG-K11) - displays the spectrum of a demodulated
RF signal with AM components
●
AF Time Domain mode (R&S EVSG-K12) - displays the frequency vs. time diagram of the input signal, similar to an oscilloscope
Generally, each mode is configured individually. When you switch modes, the most
recently defined settings for that mode are applied.
However, graphical results can also be displayed directly from the measurement
modes with numeric results. In this case, the settings for the current mode are applied
to the graphical results.
Measurement modes with both numerical and graphical results
The following measurement modes provide both numerical and graphical results:
●
GBAS mode (R&S EVSG-K4/-K5) - displays measured and decoded information
from GBAS/SCAT-I sequences, frames, and slots, and graphical displays for individual slots
Remote commands to retrieve results:
GETMDEF on page 202
GETMEAS on page 201
GBAS:GETMDEF on page 284
GBAS:GETMEAS on page 284
Common Numerical Measurement Mode Settings
The following settings are displayed for most numerical measurement modes.
RX board (RX1 | RX2)...................................................................................................42
Measurement mode...................................................................................................... 42
Channel (CH)................................................................................................................ 42
Frequency (FREQ)........................................................................................................42
RF attenuation (Att).......................................................................................................42
Channel definition (1F/2F) - ILS LOC and ILS GP mode only...................................... 42
Level correction (Lev Corr)............................................................................................42
Bandwidth (IF BW)........................................................................................................42
Measurement time (MTime)..........................................................................................42
41User Manual 1178.6227.02 ─ 05
Page 42

R&S®EVSG1000
Measurements and Results
RX board (RX1 | RX2)
The currently active receiver board. See Chapter 5.2, "Receiver Board", on page 44.
Measurement mode
The currently active measurement mode on the active receiver board, e.g. "ILS LOC".
See Chapter 5.3, "Measurement Mode", on page 45.
Channel (CH)
The receiver frequency channel on the active receiver board according to the ICAO frequency list. See "Channel Frequency Configuration (CH FREQ)" on page 62.
Frequency (FREQ)
The measured frequency on the active receiver board. See "Channel Frequency Con-
figuration (CH FREQ)" on page 62.
RF attenuation (Att)
The used attenuation mode; see also "RF Mode" on page 64.
Channel definition (1F/2F) - ILS LOC and ILS GP mode only
The ILS Localizer and Glidepath measurements can detect both course and clearance
data simultaneously. Alternatively, the individual channels can be measured only, or
any one or two user-defined frequencies. By default, a wideband measurement is performed. The displayed measurement results depend on the selected channel and frequency configuration.
See Chapter 6.1.4.1, "Channel and Frequency Configuration", on page 60.
Level correction (Lev Corr)
The applied level correction by a transducer. See "Transducer Correction"
on page 65.
Bandwidth (IF BW)
Bandwidth on which the measurement is performed. Depends on the Channel defini-
tion (1F/2F) - ILS LOC and ILS GP mode only. See Chapter 6.1.4.3, "Bandwidth (BW)",
on page 65.
Measurement time (MTime)
The duration of a single measurement. See Chapter 6.1.4.4, "Setting the Measurement
Time (MTime)", on page 66.
42User Manual 1178.6227.02 ─ 05
Page 43

R&S®EVSG1000
5 Configuring the Input Signal and Measure-
5.1 Input Signal Settings
Configuring the Input Signal and Measurement Mode
Input Signal Settings
ment Mode
The following settings are common to all measurement modes. They define which data
is measured and how, and are indicated at the top of the measurement window.
● Input Signal Settings............................................................................................... 43
● Receiver Board....................................................................................................... 44
● Measurement Mode................................................................................................ 45
Access: [Setup] > "Signal In"
Access VNC: [n] > [F1]
The following settings configure the receiver signal to be measured by the
R&S EVSG1000.
RX2 is only available with the option R&S EVSG-B1.
RX 1 Source..................................................................................................................43
RX 2 Source..................................................................................................................44
Correction RX 1 In.........................................................................................................44
Correction RX 2 In.........................................................................................................44
RX 1 Source
Configures the source for receiver 1.
"RX 1 In"
The RX 1 In connector on the front of the R&S EVSG1000 is connected to a receiving antenna (max. +13 dBm). The antenna must correspond to the specified frequency range for the measurement.
For details on the connector see Chapter 3.3.1.3, "RX1 IN / RX 2 IN",
on page 22.
43User Manual 1178.6227.02 ─ 05
Page 44

R&S®EVSG1000
Configuring the Input Signal and Measurement Mode
Receiver Board
"LF In"
Remote command:
SETUP:INPUT on page 205
RX 2 Source
Configures the source for RX 2. (Only available with option R&S EVSG-B1.)
"RX 2 In"
"LF In"
Remote command:
SETUP:INPUT on page 205
Correction RX 1 In
Configures the correction of the RX 1 input signal (in dB).
This value is subtracted from all levels and compensates effects of upstream lines and
attenuators.
A baseband signal is provided at the LF In input connector on the
rear side of the R&S EVSG1000. For details on the connector see
Chapter 3.3.2.3, "LF In (Baseband Input)", on page 26.
Through the RX 2 In input on the front of the instrument, the
R&S EVSG1000 is connected with a second receiving antenna (max.
+13 dBm) corresponding to the frequency range.
Through the LF In input (BNC plug) on the rear side of the instrument,
a baseband signal can be supplied for further analysis of typical AF
parameters.
Correction RX 2 In
Configures the correction of the RX 2 input signal (in dB).
(Only available with option R&S EVSG-B1.)
This value is subtracted from all levels and compensates effects of upstream lines and
attenuators.
5.2 Receiver Board
If a second receiver board is installed (requires the R&S EVSG-B1 option), each
receiver board can be configured to perform different measurement tasks.
To select the receiver board to configure
1. Press the [Mode] key on the front panel.
2. Select the "RX Unit 1" or "RX Unit 2" softkey.
3. Press [Enter] or the rotary knob to confirm the selection.
To select the receiver board via VNC
1. Press the [m] key on the remote keyboard.
2. Press the [PAGE UP] or [PAGE DOWN] keys to toggle between the "RX Unit 1"
and "RX Unit 2".
44User Manual 1178.6227.02 ─ 05
Page 45

R&S®EVSG1000
5.3 Measurement Mode
Configuring the Input Signal and Measurement Mode
Measurement Mode
3. Press [Enter] to confirm the selection.
Remote command:
CH on page 205
The measurement mode determines the type of signal for which the measurement is
performed (see Chapter 4, "Measurements and Results", on page 40).
To select a measurement mode
1. Press the [Mode] key on the front panel.
2. Select the required measurement mode using the rotary knob or arrow keys.
3. Press [Enter] or the rotary knob to confirm the selection.
To select a measurement mode via VNC
1. Press the [m] key on the remote keyboard.
2. Select the required measurement mode using the arrow keys.
3. Press [Enter] to confirm the selection.
Remote commands:
MODE_LOC on page 230
MODE_GP on page 230
MODE_MB on page 253
MODE_VOR on page 260
MODE_COM on page 268
MODE_FSCAN on page 290
MODE_IFSPECT on page 295
MODE_FFT on page 299
MODE_SCOPE on page 305
45User Manual 1178.6227.02 ─ 05
Page 46

R&S®EVSG1000
6 Numeric Measurement Modes
6.1 ILS Localizer and ILS Glidepath (GP) Modes
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
● ILS Localizer and ILS Glidepath (GP) Modes......................................................... 46
● ILS Marker Beacon Mode (Option R&S EVSG-K3)................................................ 67
● VOR Mode (Option R&S EVSG-K2)....................................................................... 77
● COM Mode (Option R&S EVSG-K6).......................................................................95
Access: [Mode] > "ILS Loc"/ "ILS GP"
Access VNC: [m] > Down arrow key
The ILS Localizer and Glidepath measurements demodulate the AM components of
the ILS signal and calculate characteristic parameters such as the modulation depth
and frequency or phase for specific components. Furthermore, an FFT is performed on
all components of the AF signal. The resulting AF spectrum allows you to measure the
required components and their distortions (harmonics).
Remote command:
MODE_LOC on page 230
MODE_GP on page 230
● Localizer Basics...................................................................................................... 46
● Glide Slope Basics..................................................................................................47
● ILS Localizer and Glidepath Measurements and Results....................................... 48
● ILS Localizer and Glidepath Configuration..............................................................59
6.1.1 Localizer Basics
The localizer transmitter is located near the end of the runway (nearest to the start of
the aircraft approach). Typically, horizontally aligned antennas transmit two intersecting
main beams beside one another at carrier frequencies between 108 MHz and
112 MHz. As seen from the approaching aircraft coming in for a landing, the left beam
is usually modulated at 90 Hz and the right beam at 150 Hz.
The information on position is provided after demodulation of the beam signals by evaluating the difference in depth of modulation (DDM).
DDM = m(x90) – m(x150)
The following scenarios are possible:
●
Predominance of the 90 Hz beam: the aircraft is too far to the left and must turn to
the right
●
Predominance of the 150 Hz beam: the aircraft is too far to the right and must turn
to the left
46User Manual 1178.6227.02 ─ 05
Page 47

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
●
The signal strength from both beams is equal: the aircraft is in the center, on the
right course.
Course and clearance signals
The landing path is divided into the region further away from the runway, referred to as
the course, and the runway itself, referred to as the clearance. Localizers are positioned in both areas, however they transmit their ILS signals using different frequencies, one that must travel farther, one for close-up. The frequencies differ only in a few
kiloherz. The aircraft always receives both signals, and cannot (and need not) distinguish the two. However, for test purposes, it can be useful to measure the signals individually.
Morse code identification signal
The localizer not only allows the aircraft to determine its position, it also provides identification of the ILS transmitter. The localizer periodically transmits a Morse code at
1020 Hz which uniquely identifies the transmitter. The receiver thus knows the ILS is
operating correctly and that it is receiving the correct signal. The glide slope station
does not transmit an identification signal.
6.1.2 Glide Slope Basics
The following description is taken from the Rohde & Schwarz Application Note
1MA193: "Aeronautical radio navigation measurement solutions".
The glide slope transmitter is located near the end of the runway (nearest to the start of
the aircraft approach).
47User Manual 1178.6227.02 ─ 05
Page 48

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
Figure 6-1: Approach navigation using instrument landing system (ILS)
Typically, vertically aligned antennas transmit two intersecting main beams on top of
one another at carrier frequencies between 329 MHz and 335 MHz. The top beam is
usually modulated at 90 Hz and the beam below at 150 Hz.
The information on position is provided after demodulation of the beam signals by evaluating the difference in depth of modulation (DDM). The following scenarios are possible:
●
Predominance of the 90 Hz beam: the aircraft is too high and must descend
●
Predominance of the 150 Hz beam: the aircraft is too low and needs to climb
●
The signal strength from both beams is equal: the aircraft is in the center, on the
right course.
If there is a predominance of the 90 Hz beam, then the aircraft is too high and must
descend. A predominant 150 Hz means that the aircraft is too low and needs to climb.
6.1.3 ILS Localizer and Glidepath Measurements and Results
A single receiver board in the R&S EVSG1000 can measure data at two different
receiver frequencies at the same time. Therefore, the ILS Localizer and Glidepath
measurements can detect both course and clearance data simultaneously, and display
the individual results. Alternatively, the individual channels can be measured only, or
any one or two user-defined frequencies. By default, a wideband measurement is per-
48User Manual 1178.6227.02 ─ 05
Page 49

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
formed to obtain an initial overview of the input signal and determine the basic signal
characteristics. The displayed measurement results depend on the selected channel
and frequency configuration.
Due to the large amount of different signal parameters, the ILS Localizer and Glidepath
measurements provide multiple views for the measurement results.
You can display graphical results directly from the ILS Localizer or Glidepath mode by
selecting the softkey in the "Meas" menu. In this case, the settings for the current measurement are applied to the graphical results.
To return from the graphical results to the ILS Localizer or Glidepath mode, select
"Return" ([F8]).
For details on the graphical results, see:
●
Chapter 7.1, "RF Spectrum Mode (Option R&S EVSG-K10)", on page 105
●
Chapter 7.2, "IF Spectrum Mode (Option R&S EVSG-K10)", on page 110
●
Chapter 7.3, "AF Spectrum Mode (Option R&S EVSG-K11)", on page 115
●
Chapter 7.4, "AF Time Domain Mode (Option R&S EVSG-K12)", on page 120
Remote command:
VIEW_LLZ on page 236
● RF Level and Frequency Display............................................................................49
● IF Spectrum Preview...............................................................................................50
● ILS Localizer and Glidepath Main View.................................................................. 51
● ILS Localizer Distortion View.................................................................................. 53
● ILS Localizer ID Analysis View................................................................................56
● ILS Localizer Recording View................................................................................. 59
6.1.3.1 RF Level and Frequency Display
The measured RF power and frequency of the input signal is displayed both numerically and graphically.
Figure 6-2: RF level display
The following results are provided:
●
Numeric power level in dBm ("Lev")
For measurements on two frequencies: individual and sum power levels
49User Manual 1178.6227.02 ─ 05
Page 50

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
●
Measured frequency offset to the nominal frequency in kHz
●
Numeric frequency offset of measured power
●
Numeric power sensor level in dBm (if available; "NRP")
●
Bargraph indicating the power and a color-coded overload state, where:
– red: overload state, check message
– yellow: power approaching overload state
– green: power in a valid range
●
If applicable: overload messages
Overload messages
The following messages indicate an overload:
●
"RF Overload"
Overload of the input mixer or of the analog IF path.
●
"IF Overload"
Overload of the IF signal.
●
"ADC Overload"
The dynamic range of the AD-converter is exceeded (clipping).
A combination of these overloads is also possible.
In all cases, set the RF attenuation to normal or low distortion (for RF input), or reduce
the input level.
Remote commands to retrieve results:
LA? on page 202
FMEAS on page 266
RFCH on page 203
GET_MEASFREQ on page 273
GET_TX1_MEASFREQ on page 275
GET_TX2_MEASFREQ on page 277
GET_TX1_LEVEL on page 275
GET_TX2_LEVEL on page 277
6.1.3.2 IF Spectrum Preview
A preview of the measured spectrum (power level vs. frequency) for the IF (intermediate frequency) signal is provided. The center frequency is the nominal channel frequency. The frequency range shows the measured bandwidth. The power range is
selected such that the noise level remains visible.
50User Manual 1178.6227.02 ─ 05
Page 51

R&S®EVSG1000
6.1.3.3 ILS Localizer and Glidepath Main View
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
Figure 6-3: IF spectrum preview
This preview spectrum allows you to check if the current measurement settings are
appropriate, such as the bandwidth or frequency offsets. For a larger, more detailed
spectrum diagram, select one of the graphical Spectrum modes. If you switch to such a
mode directly from a numeric measurement mode, the current measurement settings
are applied to the spectrum automatically.
The ILS Localizer and Glidepath Main view provides the following results:
Figure 6-4: ILS Localizer Main view
51User Manual 1178.6227.02 ─ 05
Page 52

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
Figure 6-5: ILS Glidepath Main view
DDM 90-150..................................................................................................................52
SDM 90,150.................................................................................................................. 52
AM 90 Hz...................................................................................................................... 53
Freq 90 Hz.................................................................................................................... 53
AM 150 Hz.................................................................................................................... 53
Freq 150 Hz.................................................................................................................. 53
ID Code.........................................................................................................................53
PHI 90/150.................................................................................................................... 53
DDM 90-150
Difference in depth of modulation (DDM) between 90 Hz and 150 Hz AM signal (m
– m
150 Hz
)
90 Hz
Note: The DDM value is also displayed graphically as a bargraph for quick evaluation.
Remote command:
DD0 on page 245
DD1 on page 245
DCLR on page 244
DCRS on page 244
SDM 90,150
Sum in Depth of Modulation (SDM); arithmetic sum of the modulation depth of the
90 Hz and the 150 Hz components without any influence of the phase between the
components.
52User Manual 1178.6227.02 ─ 05
Page 53

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
Remote command:
SD0 on page 248
SD1 on page 248
SCLR on page 247
SCRS on page 248
AM 90 Hz
AM modulation depth of 90 Hz ILS component
Remote command:
AM2 on page 243
AM2CLR on page 243
AM2CRS on page 243
Freq 90 Hz
AF frequency of 90 Hz ILS component
Remote command:
AF2 on page 242
AM 150 Hz
AM modulation depth of 150 Hz ILS component
Remote command:
AM3 on page 243
AM3CLR on page 243
AM3CRS on page 244
Freq 150 Hz
AF frequency of 150 Hz ILS component
Remote command:
AF3 on page 242
ID Code
Morse-decoded ID with three or four letters.
Remote command:
AC8 on page 242
AC8 on page 264
PHI 90/150
Phase angle measurement between 90 Hz and 150 Hz AM signal (90 Hz = reference
signal); measurement range: ±60 degrees
Remote command:
PH on page 247
6.1.3.4 ILS Localizer Distortion View
The ILS Localizer Dist view comprises all measurement parameters for the determination of the distortion factors for the 90 Hz / 150 Hz signal components.
53User Manual 1178.6227.02 ─ 05
Page 54

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
Figure 6-6: ILS Localizer Distortion view
AM 90 Hz...................................................................................................................... 54
K2 90 Hz....................................................................................................................... 54
K3 90 Hz....................................................................................................................... 55
K4 90 Hz....................................................................................................................... 55
THD 90 Hz.................................................................................................................... 55
Res. FM 90....................................................................................................................55
AM 150 Hz.................................................................................................................... 55
K2 150 Hz..................................................................................................................... 55
K3 150 Hz..................................................................................................................... 55
K4 150 Hz..................................................................................................................... 56
THD 150 Hz.................................................................................................................. 56
Res. FM 150..................................................................................................................56
AM (90+150)................................................................................................................. 56
AM 90 Hz
AM modulation depth of 90 Hz ILS component
Remote command:
AM2 on page 243
AM2CLR on page 243
AM2CRS on page 243
K2 90 Hz
Distortion 2nd order, 90 Hz signal
54User Manual 1178.6227.02 ─ 05
Page 55

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
Remote command:
K2_90 on page 246
K3 90 Hz
Distortion 3rd order, 90 Hz signal
Remote command:
K3_90 on page 246
K4 90 Hz
Distortion 4th order, 90 Hz signal
Remote command:
K4_90 on page 246
THD 90 Hz
Total Harmonic Distortion (THD), 90 Hz signal
Remote command:
THD_90 on page 248
Res. FM 90
Residual frequency modulation for 90 Hz signal
Configure the filter to be used using "Res. FM Filt. (ILS only)" on page 66.
AM 150 Hz
AM modulation depth of 150 Hz ILS component
Remote command:
AM3 on page 243
AM3CLR on page 243
AM3CRS on page 244
K2 150 Hz
Relative amplitude of an AF signal's second harmonic, calculated as:
<amplitude of second harmonic> / <amplitude of fundamental>
For 90 Hz + 150 Hz:
<mean amplitude of second harmonics> / <mean amplitude of fundamentals>
Remote command:
K2_150 on page 245
K3 150 Hz
Relative amplitude of an AF signal's third harmonic, calculated as:
<amplitude of third harmonic> / <amplitude of fundamental>
For 90 Hz + 150 Hz:
<mean amplitude of third harmonics> / <mean amplitude of fundamentals>
Remote command:
K3_150 on page 246
55User Manual 1178.6227.02 ─ 05
Page 56

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
K4 150 Hz
Relative amplitude of the fourth harmonic for the 150 Hz signal component
Remote command:
K4_150 on page 246
THD 150 Hz
Total Harmonic Distortion (THD) for the 150 Hz signal component
Remote command:
THD_150 on page 248
Res. FM 150
Residual frequency modulation for 150 Hz signal
AM (90+150)
Total AM modulation depth of the 90 Hz and the 150 Hz components, taking the phase
between the components into account.
6.1.3.5 ILS Localizer ID Analysis View
The ILS Localizer ID Analysis view provides the following results.
This view is not available for clearance (CLR) signals in two-frequency systems.
56User Manual 1178.6227.02 ─ 05
Page 57

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
Figure 6-7: ID Analysis view
DDM 90-150..................................................................................................................57
Last ID...........................................................................................................................57
ID Code.........................................................................................................................58
ID Period....................................................................................................................... 58
Dot Length.....................................................................................................................58
Dash Length..................................................................................................................58
Dot-Dash Gap............................................................................................................... 58
Letter Gap..................................................................................................................... 58
ID AM............................................................................................................................ 58
ID Freq.......................................................................................................................... 58
DDM 90-150
Difference in depth of modulation (DDM) between 90 Hz and 150 Hz AM signal (m
– m
150 Hz
)
90 Hz
Note: The DDM value is also displayed graphically as a bargraph for quick evaluation.
Remote command:
DD0 on page 245
DD1 on page 245
DCLR on page 244
DCRS on page 244
Last ID
Time since last ID pulse was measured
57User Manual 1178.6227.02 ─ 05
Page 58

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
Remote command:
LASTID_TIME on page 250
ID Code
Morse-decoded ID with three or four letters.
Remote command:
AC8 on page 242
AC8 on page 264
ID Period
Time between two measured ID pulses
Remote command:
ID_PERIOD on page 249
Dot Length
Length of time a dot is transmitted in the used Morse code in milliseconds.
Remote command:
ID_DOT_LENGTH on page 249
Dash Length
Length of time a dash is transmitted in the used Morse cod in milliseconds.
Remote command:
ID_DASH_LENGTH on page 249
Dot-Dash Gap
Length of time that passes between a transmitted dot and a dash in the used Morse
code in milliseconds.
Remote command:
ID_DOTDASH_GAP on page 249
Letter Gap
Length of time that passes between two transmitted letters in the used Morse code in
milliseconds.
Remote command:
ID_LETTER_GAP on page 249
ID AM
AM Modulation depth of identifier signal (default: 1020 Hz).
Remote command:
AM8 on page 244
AM8 on page 265
ID Freq
Frequency of the morse signal.
Remote command:
AF8 on page 243
AF8 on page 264
58User Manual 1178.6227.02 ─ 05
Page 59

R&S®EVSG1000
6.1.3.6 ILS Localizer Recording View
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
The Recording view displays the recorded data for ILS Localizer measurements from
the selected data list (see "List" on page 176). If available, the stored GPS data from
the GPS receiver is also displayed.
Which measurement results are stored is described in the remote commands, see
GETDATADEF on page 314.
The individual measurement results are described in the result views.
For details on data logging see Chapter 11.2, "Recording Measurement Data",
on page 174.
Remote commands to retrieve data:
GETDATADEF on page 314
GETDATASET on page 314
6.1.4 ILS Localizer and Glidepath Configuration
The following settings are available for the ILS Localizer and Glidepath measurements.
59User Manual 1178.6227.02 ─ 05
Page 60

R&S®EVSG1000
6.1.4.1 Channel and Frequency Configuration
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
Settings for recording, including trigger settings, are described in Chapter 11.2,
"Recording Measurement Data", on page 174.
● Channel and Frequency Configuration................................................................... 60
● Ampt........................................................................................................................63
● Bandwidth (BW)...................................................................................................... 65
● Setting the Measurement Time (MTime).................................................................66
● DDM and SDM Configuration..................................................................................66
The ILS Localizer and Glidepath measurements can detect both course and clearance
carriers simultaneously. Alternatively, the individual carriers can be measured only, or
any one or two user-defined frequencies. By default, a wideband measurement is performed. The available measurement settings depend on the selected channel and frequency configuration.
● Channel Setup........................................................................................................ 60
● Carrier Configuration (1F/2F Config).......................................................................61
● Channel Frequency Configuration (CH FREQ).......................................................62
Channel Setup
Access: > [Meas] > "1F/2F"
Access VNC: [m] > [F1]
1F/2F
Selects the number of frequencies or channels to be measured.
"1F"
"2F"
"2F CRS"
One frequency only is measured, namely the nominal frequency,
which is also the center frequency.
The nominal frequency is configured by the Channel Frequency Con-
figuration (CH FREQ) settings.
Two frequencies are measured at the same time. Which frequencies
are measured is configured by the Channel Frequency Configuration
(CH FREQ) settings.
The numeric results are calculated as the sum of both frequencies. In
the RF Level display, the individual carriers are also indicated. In the
RF Spectrum preview, both carriers are displayed.
Both the course and clearance frequencies are measured simultaneously. The results for both frequencies, as well as the sum of both,
are displayed in the RF Level display. Both frequencies are displayed
in the RF Spectrum preview. The numeric results are displayed for
the course frequency. To view the results for the clearance frequency,
switch to "2F CLR"
Note: Depending on the ILS system and the country, the course can
be the upper or lower frequency (see "Upper Freq" on page 62).
60User Manual 1178.6227.02 ─ 05
Page 61

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
"2F CLR"
"Wide"
Remote command:
MEASMODE on page 250
Carrier Configuration (1F/2F Config)
Access: [Config] > "1F/2F Config"
Access VNC: [s] > "F1"
Configures the carriers and frequencies for measurements on a single or two frequencies (not wideband). Which settings are available depends on the "1F/2F" on page 60.
CRS/CLR Carr.............................................................................................................. 61
Course...........................................................................................................................62
Clearance......................................................................................................................62
1F Offset........................................................................................................................62
Find Carrier................................................................................................................... 62
Carrier Thresh...............................................................................................................62
Upper Freq....................................................................................................................62
Both the course and clearance frequencies are measured simultaneously. The results for both frequencies, as well as the sum of both,
are displayed in the RF Level display. Both frequencies are displayed
in the RF Spectrum preview. The numeric results are displayed for
the course frequency. To view the results for the course frequency,
switch to "2F CRS".
Note: Depending on the ILS system and the country, the course can
be the upper or lower frequency (see "Upper Freq" on page 62).
A wideband measurement is performed around the nominal frequency. The frequency range is defined by the BW Wide ).
CRS/CLR Carr
Defines whether the course and clearance carriers are determined automatically or
manually.
For automatic determination, both carriers are determined automatically and continuously during the entire measurement.
You can define a threshold (Carrier Thresh) by which the power level for a carrier must
change before the carrier frequency is adapted. The other settings that define the frequencies are disabled.
For manual determination, you must specify the frequencies as offsets to either direction of the nominal frequency.
Remote command:
LLZ_DEMFREQS_OFFSET_AUTOMAN on page 233
LLZ_DEMFREQS_OFFSET_LOWERFREQ on page 233
LLZ_DEMFREQS_OFFSET_UPPERFREQ on page 233
GS_DEMFREQS_OFFSET_AUTOMAN on page 239
GS_DEMFREQS_OFFSET_LOWERFREQ on page 239
GS_DEMFREQS_OFFSET_UPPERFREQ on page 240
61User Manual 1178.6227.02 ─ 05
Page 62

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
Course
Defines the course carrier as a frequency offset from the nominal frequency.
Clearance
Defines the clearance carrier as a frequency offset from the nominal frequency in the
opposite direction to the course carrier.
1F Offset
For single frequency measurements only:
Defines an offset of the measured frequency to the nominal frequency.
Remote command:
LLZ_DEMFREQS_OFFSET_1F on page 233
GS_DEMFREQS_OFFSET_1F on page 239
Find Carrier
For manual carrier determination only:
Determines the carrier frequencies automatically, but only once. The frequencies do
not change automatically if the input signal changes.
Remote command:
LLZ_START_FINDCARRIER on page 234
GS_START_FINDCARRIER on page 240
Carrier Thresh
Defines a threshold for automatic carrier determination (once or continuously). The
measured power level at a frequency other than the current carrier must exceed this
level before the carrier frequency is adapted. This is useful for noisy or unstable signals so the carrier frequencies do not change unnecessarily often due to minor disturbances.
Remote command:
GS_CARRIER_THRESHOLD_DB on page 237
LLZ_CARRIER_THRESHOLD_DB on page 231
Upper Freq
The course and clearance carriers are defined as offsets to either side of the center
frequency. Which frequency is considered to be the course carrier - the upper or lower
frequency - depends on the used standard and the country it is used in. Thus, you can
swap the carrier definition if necessary.
Remote command:
SETUP:UNIT:UPPERFREQ on page 210
Channel Frequency Configuration (CH FREQ)
Access: [CH FREQ]
Access VNC: [q]
The channel frequency determines the nominal frequency at which the measurement is
performed. For some avionics standards, the channels are associated with specific fre-
62User Manual 1178.6227.02 ─ 05
Page 63

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
quencies. (See Chapter A, "ILS Channel Frequency List", on page 322 and Chapter B,
"VOR Channel Frequency List", on page 324.)
CH.................................................................................................................................63
Freq...............................................................................................................................63
Step Size.......................................................................................................................63
CH
Sets the receiver frequency channel on the active receiver board according to the
ICAO frequency list.
Remote command:
RFCH on page 203
Freq
Sets the nominal frequency for the measurement. By default, this frequency is also
assumed to be the center frequency for spectrum displays, unless an offset is defined.
For measurements on two frequencies, the frequencies are defined as offsets to this
nominal frequency.
Remote command:
RF on page 203
Step Size
Defines the frequency step size for the rotary knob when setting the frequency.
In many avionics signals, channels are assigned to frequencies with a fixed offset. By
setting the step size of the rotary knob to the fixed offset, you can easily scroll through
the signal's channel frequencies using the rotary knob. Thus, for example, you can
analyze the measurement results for one channel after the other simply by changing
the selected channel frequency with the rotary knob.
The default step size for ILS/VOR mode is 50 kHz.
Remote command:
GS_DEFAULT_FREQSTEP on page 238
6.1.4.2 Ampt
Access: [AMPT]
Access VNC: [w]
The following settings define the amplification for the input signal.
RF Att............................................................................................................................64
RF Mode....................................................................................................................... 64
Transducer Correction...................................................................................................65
63User Manual 1178.6227.02 ─ 05
Page 64

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
RF Att
Determines how the attenuation of the RF signal is defined. The attenuation should be
adjusted such that the measured power level remains in the valid level range (indicated
by the green area of the bargraph, see Chapter 6.1.3.1, "RF Level and Frequency Dis-
play", on page 49). Note that the valid level range depends on the selected measure-
ment mode.
"Manual"
"Auto"
Remote command:
SETATTMODE on page 203
SCOPE_ATTMODE on page 305
FFT_ATTMODE on page 300
IFSPECT_ATTMODE on page 295
The RF attenuation mode is specified manually (see "RF Mode"
on page 64).
The RF attenuation mode is selected automatically.
The signal attenuation is selected automatically according to the signal strength.
This mode works best with clean signals. In difficult receiving conditions, the "Low Noise", "Normal" or "Low Distortion" modes can be
more stable.
When monitoring signals with mostly constant signal levels, it is also
recommended that you use the "Low Noise", "Normal" or "Low Distortion" mode.
If the R&S EVSG1000 has to adapt the attenuation frequently, indicated by a frequent clicking noise from the attenuator, spikes can occur
in the trace.
RF Mode
Defines the RF attenuation mode to be used.
"Low Noise"
"Norm"
"Low Dist"
Remote command:
SETATTMODE on page 203
FSCAN_ATTMODE on page 290
SCOPE_ATTMODE on page 305
FFT_ATTMODE on page 300
IFSPECT_ATTMODE on page 295
GBAS:ATTMODE on page 279
15 dB pre-amplification
Provides a high sensitivity. Suitable when scanning the area for distant signals.
0 dB
Provides a normal sensitivity.
15 dB attenuation
Provides a low sensitivity. Suitable when analyzing a nearby signal, to
avoid overload due to high-level signals.
64User Manual 1178.6227.02 ─ 05
Page 65

R&S®EVSG1000
6.1.4.3 Bandwidth (BW)
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
Transducer Correction
Configures the level correction. The specified value is added to the measured power
levels to compensate for an inherent offset by the measurement setup, for example the
antenna.
Access: [BW]
Access VNC: [e]
The bandwidth determines the frequency range for which the measurement is performed. Depending on the measurement mode, and whether a wideband or a specific
frequency is measured, different settings are available.
BW Wide
Specifies the filter bandwidth for wideband measurements.
Remote command:
LLZ_DEM_WIDE_BW on page 232
GS_DEM_WIDE_BW on page 238
BW 1F/2F
Specifies the filter bandwidth for measurements at one or two specific frequencies.
Figure 6-8: Bandwidth Settings - 1F/2F
65User Manual 1178.6227.02 ─ 05
Page 66

R&S®EVSG1000
Numeric Measurement Modes
ILS Localizer and ILS Glidepath (GP) Modes
Remote command:
LLZ_DEM_1F2F_BW on page 232
GS_DEM_1F2F_BW on page 238
BW Dist/ID
Specifies the filter bandwidth for distortion and ID measurements.
Remote command:
LLZ_DEM_ID_BW on page 232
Res. FM Filt. (ILS only)
Defines the filter type used to determine residual FM (see Chapter 6.1.3.4, "ILS Local-
izer Distortion View", on page 53).
"ICAO"
"Narrow"
Remote command:
FILTER_LLZ_RESIDFM on page 234
Filter according to ICAO specification
Narrow filter; the DDM filters used to determine the 90 Hz/ 150 Hz
modulation values are used to avoid interference between the signals
6.1.4.4 Setting the Measurement Time (MTime)
Access: [MTime]
Access VNC: [d]
The measurement time determines the interval at which new measurement results are
displayed. Internally, values are captured every 100 ms, that is: 10 per second. (With
the High Measurement Rate option R&S EVSG-K22 installed, the internal capture rate
is 10 ms, that is: 100 per second.) If the defined measurement time is longer, the values captured internally in that interval are averaged and only the average value is displayed.
Note that the measurement time determines the minimum interval for values to be
stored during recording (see "Time" on page 177).
Enter the time in milliseconds.
Remote command:
MEASTIME on page 202
6.1.4.5 DDM and SDM Configuration
The following settings configure the DDM and SDM measurement results.
DDM Unit.......................................................................................................................67
SDM Unit.......................................................................................................................67
ILS Phase......................................................................................................................67
DDM Polarity.................................................................................................................67
DDM Bargr.................................................................................................................... 67
66User Manual 1178.6227.02 ─ 05
Page 67

R&S®EVSG1000
Numeric Measurement Modes
ILS Marker Beacon Mode (Option R&S
DDM Unit
Specifies the unit of the DDM display.
1 (dimensionless value) | % | μA
Remote command:
SETUP:UNIT:DDM on page 208
SDM Unit
Specifies the unit of the SDM display.
1 (dimensionless value) | % | μA
Remote command:
SETUP:UNIT:SDM on page 210
ILS Phase
Specifies the value range in the ILS phase.
Bipolar: -60 … +60° | Unipolar: 0 … 120°
Remote command:
SETUP:UNIT:ILSPHASE on page 209
EVSG-K3)
DDM Polarity
Specifies the DDM polarity.
90−150 | 150−90
Remote command:
SETUP:UNIT:POLARITYDDM on page 209
DDM Bargr
Configures the scaling of the DDM bargraph.
0.075 | 0.150 | 0.400 (dimensionless)
Remote command:
SETUP:UNIT:BARGRAPH on page 208
6.2 ILS Marker Beacon Mode (Option R&S EVSG-K3)
Access: [Mode] > "ILS MB"
Access VNC: [m] > Down arrow key
Remote command:
MODE_MB on page 253
● Basics on Marker Beacons..................................................................................... 68
● ILS Marker Beacon Measurements and Results.....................................................68
● Configuring ILS Marker Beacon Measurements..................................................... 74
67User Manual 1178.6227.02 ─ 05
Page 68

R&S®EVSG1000
Numeric Measurement Modes
6.2.1 Basics on Marker Beacons
Marker beacon (MB) receivers are used for a rough distance measurement. They are
available only for some ILS installations.
ILS Marker Beacon Mode (Option R&S
EVSG-K3)
Figure 6-9: Marker beacon placement with respect to runway
Marker beacon receivers decode audio and provide signaling output to identify one of
three marker beacons installed near the runway. They transmit a narrow beam width at
75 MHz carrier frequency in a vertical direction. Each of them has a different distinct
modulation code to allow the receiver to identify which one it is flying over.
Both visual (color of the marker beacon) and audio tone identification is supported for
determining which marker has been flown over. The audio/visual pairing of marker beacons is as follows:
●
Outer marker flashes BLUE in the cockpit at 400 Hz (“relaxed” tone).
●
Middle marker flashes AMBER in the cockpit at 1300 Hz (“hurried” tone).
●
Inner marker flashes WHITE in the cockpit at 3000 Hz (“urgent” tone).
6.2.2 ILS Marker Beacon Measurements and Results
The ILS Marker Beacon measurement provides multiple views for the measurement
results.
68User Manual 1178.6227.02 ─ 05
Page 69

R&S®EVSG1000
Numeric Measurement Modes
ILS Marker Beacon Mode (Option R&S
EVSG-K3)
You can display graphical results directly from the ILS Marker Beacon mode by selecting the softkey in the "Meas" menu. In this case, the settings for the current measurement are applied to the graphical results.
To return from the graphical results to the ILS Marker Beacon mode, select "Return"
([F8]).
For details on the graphical results, see:
●
Chapter 7.1, "RF Spectrum Mode (Option R&S EVSG-K10)", on page 105
●
Chapter 7.2, "IF Spectrum Mode (Option R&S EVSG-K10)", on page 110
●
Chapter 7.3, "AF Spectrum Mode (Option R&S EVSG-K11)", on page 115
●
Chapter 7.4, "AF Time Domain Mode (Option R&S EVSG-K12)", on page 120
Remote command:
VIEW_MB on page 255
● RF Level and Frequency Display............................................................................69
● IF Spectrum Preview...............................................................................................70
● ILS Marker Beacon Main View................................................................................71
● ILS Marker Beacon ID Analysis.............................................................................. 72
● ILS Marker Beacon Recording View....................................................................... 74
6.2.2.1 RF Level and Frequency Display
The measured RF power and frequency of the input signal is displayed both numerically and graphically.
Figure 6-10: RF level display
The following results are provided:
●
Numeric power level in dBm ("Lev")
For measurements on two frequencies: individual and sum power levels
●
Measured frequency offset to the nominal frequency in kHz
●
Numeric frequency offset of measured power
●
Numeric power sensor level in dBm (if available; "NRP")
●
Bargraph indicating the power and a color-coded overload state, where:
– red: overload state, check message
– yellow: power approaching overload state
69User Manual 1178.6227.02 ─ 05
Page 70

R&S®EVSG1000
Numeric Measurement Modes
ILS Marker Beacon Mode (Option R&S EVSG-K3)
– green: power in a valid range
●
If applicable: overload messages
Overload messages
The following messages indicate an overload:
●
"RF Overload"
Overload of the input mixer or of the analog IF path.
●
"IF Overload"
Overload of the IF signal.
●
"ADC Overload"
The dynamic range of the AD-converter is exceeded (clipping).
A combination of these overloads is also possible.
In all cases, set the RF attenuation to normal or low distortion (for RF input), or reduce
the input level.
Remote commands to retrieve results:
LA? on page 202
FMEAS on page 266
RFCH on page 203
GET_MEASFREQ on page 273
GET_TX1_MEASFREQ on page 275
GET_TX2_MEASFREQ on page 277
GET_TX1_LEVEL on page 275
GET_TX2_LEVEL on page 277
6.2.2.2 IF Spectrum Preview
A preview of the measured spectrum (power level vs. frequency) for the IF (intermediate frequency) signal is provided. The center frequency is the nominal channel frequency. The frequency range shows the measured bandwidth. The power range is
selected such that the noise level remains visible.
Figure 6-11: IF spectrum preview
70User Manual 1178.6227.02 ─ 05
Page 71

R&S®EVSG1000
Numeric Measurement Modes
This preview spectrum allows you to check if the current measurement settings are
appropriate, such as the bandwidth or frequency offsets. For a larger, more detailed
spectrum diagram, select one of the graphical Spectrum modes. If you switch to such a
mode directly from a numeric measurement mode, the current measurement settings
are applied to the spectrum automatically.
6.2.2.3 ILS Marker Beacon Main View
The ILS Marker Beacon Main view provides the following results:
ILS Marker Beacon Mode (Option R&S
EVSG-K3)
AM 400 Hz.................................................................................................................... 71
Freq 400 Hz.................................................................................................................. 71
AM 1300 Hz.................................................................................................................. 72
Freq 1300 Hz................................................................................................................ 72
AM 3000 Hz.................................................................................................................. 72
Freq 3000 Hz................................................................................................................ 72
AM 400 Hz
AM modulation depth of the 400-Hz component
Remote command:
AM6 on page 257
Freq 400 Hz
Measured frequency of the 400-Hz component
Remote command:
AF6 on page 256
71User Manual 1178.6227.02 ─ 05
Page 72

R&S®EVSG1000
Numeric Measurement Modes
ILS Marker Beacon Mode (Option R&S EVSG-K3)
AM 1300 Hz
AM modulation depth of the 1300-Hz component
Remote command:
AM5 on page 257
Freq 1300 Hz
Measured frequency of the 1300-Hz component
Remote command:
AF5 on page 256
AM 3000 Hz
AM modulation depth of the 3000-Hz component
Remote command:
AM4 on page 256
Freq 3000 Hz
Measured frequency of the 3000-Hz component
Remote command:
AF4 on page 256
6.2.2.4 ILS Marker Beacon ID Analysis
Displays the results of the marker beacon signal id analysis.
72User Manual 1178.6227.02 ─ 05
Page 73

R&S®EVSG1000
Numeric Measurement Modes
ILS Marker Beacon Mode (Option R&S
400 Hz Dash................................................................................................................. 73
400 Hz Gap...................................................................................................................73
1300 Hz Dash............................................................................................................... 73
1300 Hz Dot.................................................................................................................. 73
1300 Hz Gap.................................................................................................................73
3000 Hz Dot.................................................................................................................. 73
3000 Hz Gap.................................................................................................................73
400 Hz Dash
Displays the length of a dash for the outer marker (in ms).
Remote command:
ID_F400_DASHLEN on page 257
400 Hz Gap
Displays the gap between two dashes for the outer marker (in ms).
Remote command:
ID_F400_GAP on page 258
1300 Hz Dash
Displays the length of a dash for the middle marker (in ms).
Remote command:
ID_F1300_DASHLEN on page 257
EVSG-K3)
1300 Hz Dot
Displays the length of a dot for the middle marker (in ms).
Remote command:
ID_F1300_DOTLEN on page 258
1300 Hz Gap
Displays the gap between dot and dash for the middle marker (in ms).
Remote command:
ID_F1300_GAP on page 258
3000 Hz Dot
Displays the length of a dot for the inner marker (in ms).
Remote command:
ID_F3000_DOTLEN on page 258
3000 Hz Gap
Displays the gap between two dashes for the inner marker (in ms).
Remote command:
ID_F3000_GAP on page 258
73User Manual 1178.6227.02 ─ 05
Page 74

R&S®EVSG1000
Numeric Measurement Modes
ILS Marker Beacon Mode (Option R&S
6.2.2.5 ILS Marker Beacon Recording View
The Recording view displays the recorded data for ILS Localizer measurements from
the selected data list (see "List" on page 176). If available, the stored GPS data from
the GPS receiver is also displayed.
EVSG-K3)
Which measurement results are stored is described in the remote commands, see
GETDATADEF on page 314.
The individual measurement results are described in the other ILS Marker Beacon
result views.
For details on data logging see Chapter 11.2, "Recording Measurement Data",
on page 174.
6.2.3 Configuring ILS Marker Beacon Measurements
The following settings are available for the ILS Marker Beacon measurement.
Settings for recording, including trigger settings, are described in Chapter 11.2,
"Recording Measurement Data", on page 174.
● Setting the Receiver Frequency..............................................................................75
● Ampt........................................................................................................................75
● Setting the Measurement Time (MTime).................................................................76
74User Manual 1178.6227.02 ─ 05
Page 75

R&S®EVSG1000
6.2.3.1 Setting the Receiver Frequency
Numeric Measurement Modes
ILS Marker Beacon Mode (Option R&S EVSG-K3)
Access: [CH FREQ]
Access VNC: [q]
The receiver frequency determines the nominal frequency at which the measurement
is performed.
Freq...............................................................................................................................75
Step Size.......................................................................................................................75
Freq
Sets the nominal frequency for the measurement.
Remote command:
RF on page 203
Step Size
Defines the frequency step size for the rotary knob when setting the frequency.
The default step size for ILS MB mode is 50 kHz.
6.2.3.2 Ampt
Access: [AMPT]
Access VNC: [w]
The following settings define the amplification for the input signal.
RF Att............................................................................................................................75
RF Mode....................................................................................................................... 76
Transducer Correction...................................................................................................76
RF Att
Determines how the attenuation of the RF signal is defined. The attenuation should be
adjusted such that the measured power level remains in the valid level range (indicated
by the green area of the bargraph, see Chapter 6.1.3.1, "RF Level and Frequency Dis-
play", on page 49). Note that the valid level range depends on the selected measure-
ment mode.
"Manual"
The RF attenuation mode is specified manually (see "RF Mode"
on page 64).
75User Manual 1178.6227.02 ─ 05
Page 76

R&S®EVSG1000
Numeric Measurement Modes
ILS Marker Beacon Mode (Option R&S
"Auto"
Remote command:
SETATTMODE on page 203
SCOPE_ATTMODE on page 305
FFT_ATTMODE on page 300
IFSPECT_ATTMODE on page 295
RF Mode
Defines the RF attenuation mode to be used.
"Low Noise"
"Norm"
"Low Dist"
Remote command:
SETATTMODE on page 203
FSCAN_ATTMODE on page 290
SCOPE_ATTMODE on page 305
FFT_ATTMODE on page 300
IFSPECT_ATTMODE on page 295
GBAS:ATTMODE on page 279
The RF attenuation mode is selected automatically.
The signal attenuation is selected automatically according to the signal strength.
This mode works best with clean signals. In difficult receiving conditions, the "Low Noise", "Normal" or "Low Distortion" modes can be
more stable.
When monitoring signals with mostly constant signal levels, it is also
recommended that you use the "Low Noise", "Normal" or "Low Distortion" mode.
If the R&S EVSG1000 has to adapt the attenuation frequently, indicated by a frequent clicking noise from the attenuator, spikes can occur
in the trace.
15 dB pre-amplification
Provides a high sensitivity. Suitable when scanning the area for distant signals.
0 dB
Provides a normal sensitivity.
15 dB attenuation
Provides a low sensitivity. Suitable when analyzing a nearby signal, to
avoid overload due to high-level signals.
EVSG-K3)
Transducer Correction
Configures the level correction. The specified value is added to the measured power
levels to compensate for an inherent offset by the measurement setup, for example the
antenna.
6.2.3.3 Setting the Measurement Time (MTime)
Access: [MTime]
Access VNC: [d]
76User Manual 1178.6227.02 ─ 05
Page 77

R&S®EVSG1000
Numeric Measurement Modes
VOR Mode (Option R&S
The measurement time determines the interval at which new measurement results are
displayed. Internally, values are captured every 100 ms, that is: 10 per second. (With
the High Measurement Rate option R&S EVSG-K22 installed, the internal capture rate
is 10 ms, that is: 100 per second.) If the defined measurement time is longer, the values captured internally in that interval are averaged and only the average value is displayed.
Note that the measurement time determines the minimum interval for values to be
stored during recording (see "Time" on page 177).
Enter the time in milliseconds.
Remote command:
MEASTIME on page 202
6.3 VOR Mode (Option R&S EVSG-K2)
Access: [Mode] > "VOR"
EVSG-K2)
Access VNC: [m] > Down arrow key
If the VOR Mode option (R&S EVSG-K2) is installed, signals from VOR systems can
be analyzed with the R&S EVSG1000.
Remote command:
MODE_VOR on page 260
6.3.1 VOR Basics
Some background knowledge on basic terms and principles used in VOR measurements is provided here for a better understanding of the required configuration settings.
6.3.1.1 VHF Omni Directional Radio Range (VOR)
Very high frequency (VHF) omnidirectional radio range (VOR) is a radio navigation system for short and medium distance navigation. The VOR radio navigation aid supplies
the aircraft with directional information, angle information relative to the magnetic north
from the site of the beacon. Thus, it helps aircraft to determine their position and stay
on course. The range covered by a VOR station is ideally a circle around the VOR station with a radius depending on the flight altitude.
A VOR system consists of a ground transmission station and a VOR receiver on board
the aircraft.
77User Manual 1178.6227.02 ─ 05
Page 78

R&S®EVSG1000
Numeric Measurement Modes
VOR Mode (Option R&S
EVSG-K2)
Ground transmitter
The transmitter stations operate at VHF frequencies of 108 MHz to 118 MHz, with the
code identification (COM/ID) transmitting on a modulation tone of 1.020 kHz. It emits
two types of signals:
●
An omnidirectional reference signal (REF) that can consist of two parts:
– 30 Hz frequency modulated (FM) sine wave on subcarrier 9.96 kHz from ampli-
tude modulation (AM) carrier
– 1020 Hz AM modulated sine wave Morse code
●
A directional positioning signal, variable (VAR): 30 Hz AM modulated sine waves
with variable phase shift
VOR receiver
The VOR receiver obtains the directional information by measuring the phase difference of two 30 Hz signals transmitted by the beacon. A conventional VOR station
transmits with a rotating antenna. From the rotation, a sine wave AM modulated signal
arises in the receiver, whose phase position depends on the present angle of rotation.
The rotation frequency of the antenna sets the modulation frequency at 30 Hz.
To determine the radial, the phase difference to a reference phase must be measured.
This reference phase must be independent of the rotation of the antenna. Thus, it is
modulated with a frequency deviation of 480 Hz in FM onto a secondary carrier with
9.96 kHz. It is then emitted over a separate antenna with a round characteristic.
Figure 6-12: Basics of the VOR phase angles (
Φ
) depending on the azimuth angle (Θ)
The frequency modulated secondary carrier for the reference phase is itself again
modulated in AM on the RF carrier of the VOR station. In addition to the signals necessary for navigation, a Morse code with 1020 Hz can be transmitted on the VOR carrier.
Also, speech in the usual AF from 300 Hz to 3.3 kHz can be transmitted. Often the
voice channel of a VOR station is used for the transmission of ATIS (Automatic Termi-
78User Manual 1178.6227.02 ─ 05
Page 79

R&S®EVSG1000
Numeric Measurement Modes
VOR Mode (Option R&S EVSG-K2)
nal Information Service) messages. The Morse code can be used to identify the VOR
station, similar to the "Morse code identification signal" on page 47 in the ILS signal.
The spectrum of a VOR signal is therefore composed of the carrier and three modulated components.
Figure 6-13: Example of the VOR Spectrum
The identical modulation degree m = 0.3 for all three components was selected in
ICAO annex-10 [63] such that the total signal still contains 10% modulation reserve.
The carrier is therefore not suppressed at any time. The 9960 Hz reference carrier is
FM modulated with 480 Hz deviation. The VOR signal generation as under ICAO is
shown below.
Figure 6-14: Basics of the VOR signal generation
79User Manual 1178.6227.02 ─ 05
Page 80

R&S®EVSG1000
6.3.1.2 VOR Demodulator
Numeric Measurement Modes
VOR Mode (Option R&S EVSG-K2)
Figure 6-15: Block diagram of the VOR software demodulator
80User Manual 1178.6227.02 ─ 05
Page 81

R&S®EVSG1000
Numeric Measurement Modes
VOR Mode (Option R&S
EVSG-K2)
The VOR signal contains three AM modulated components that must be separated in a
first step:
●
Rotational signal (30 Hz)
●
Identification/voice part (300 Hz to 4 kHz)
●
FM modulated carrier (9960 Hz ± 700 Hz)
To obtain the AM depth, a lowpass filter must calculate the mean carrier power, while
suppressing all other signal components. The mean carrier power is then used to normalize the instantaneous magnitude of the I/Q signal. The result is the AM modulation
depth signal vs. time. The three AM components are separated using bandpass filters
covering the individual frequency ranges.
A Morse decoder detects and decodes the ON and OFF periods in the identifier signal.
The separated FM modulated carrier is passed through an FM demodulator. The FM
carrier frequency (nominal 9960 Hz) is calculated as the average output value of the
FM demodulator. To obtain the 30 Hz reference signal, the FM demodulator output is
filtered by the same narrow 30 Hz bandpass as the 30 Hz AM rotational component.
FM deviation is calculated using the estimated magnitude of the 30 Hz reference signal.
The azimuth is calculated as the phase difference of the 30 Hz reference signal and
the 30 Hz rotational signal.
VOR distortion
In the VOR software demodulator two kinds of signals are analyzed regarding distortions:
●
AM Distortion: The AM modulation depth vs time signal is processed by an FFT,
with a user-defined resolution bandwidth. The trace is displayed in the Modulation
Spectrum display. The K2, K3 and THD results of the AM components are calculated based on the FFT trace and the estimated modulation frequencies.
●
FM Distortion: The FM modulation depth vs time signal is processed by an FFT,
using a resolution bandwidth automatically set by the application. You cannot view
the resulting trace. The K2, K3 and THD results of the FM components are calculated based on the FFT trace and the estimated modulation frequencies.
AM Modulation Depth
To obtain the AM depth, a lowpass filter must calculate the mean carrier power, while
suppressing all other signal components. The mean carrier power is then used to normalize the instantaneous magnitude of the I/Q signal. The result is the AM modulation
depth signal versus time. It is then used to calculate the following AM modulation
depths:
●
Depth
●
Depth
●
DepthID: AM modulation depth of the identification/voice signal
: AM modulation depth of the FM carrier, typically at 9960 Hz
9960
: AM modulation depth of the 30 Hz rotational signal
AM30
81User Manual 1178.6227.02 ─ 05
Page 82

R&S®EVSG1000
Numeric Measurement Modes
VOR Mode (Option R&S
EVSG-K2)
FM Modulation Depth
The FM deviation Devia
(typically 480 Hz) is calculated by estimating the magni-
FM30
tude of the FM demodulated 30 Hz reference signal.
Azimuth (Phase Difference at 30 Hz)
The phases of both the 30 Hz FM and 30 Hz AM signal are estimated at exactly the
same time instant. The azimuth (Phase FM-AM) is calculated as the phase difference
between the two.
AF Frequencies
In the VOR demodulator the AF frequencies are calculated:
●
Freq
●
Freq
●
FreqID: voice / identification; From 300 Hz to 4 kHz, typically 1020 Hz
●
Freq
: 30 Hz Rotational-signal (AM)
AM30
: 30 Hz Reference-signal (FM)
FM30
: The carrier frequency of the FM carrier, typically 9960 Hz; Calculated as
9960
mean value of the FM demodulator output
6.3.1.3 Phase Notation in VOR Measurements
In VOR measurements, the phase can be provided using two different notations, indicated in the following illustration:
Figure 6-16: Phase notation in VOR measurements
Phase is always counted counter-clockwise, starting at the reference.
The reference depends on the selected notation:
●
FROM: North direction at the VOR beacon
82User Manual 1178.6227.02 ─ 05
Page 83

R&S®EVSG1000
Numeric Measurement Modes
VOR Mode (Option R&S EVSG-K2)
●
TO: North direction at the receiver/ aircraft
To convert one notation to the other, use the following equation:
PhaseTO = Phase
+ 180 deg
FROM
6.3.2 VOR Measurements and Results
The VOR measurement provides multiple views for the measurement results.
You can display graphical results directly from the VOR mode by selecting the softkey
in the "Meas" menu. In this case, the settings for the current measurement are applied
to the graphical results.
To return from the graphical results to the VOR mode, select "Return" ([F8]).
For details on the graphical results, see:
●
Chapter 7.1, "RF Spectrum Mode (Option R&S EVSG-K10)", on page 105
●
Chapter 7.2, "IF Spectrum Mode (Option R&S EVSG-K10)", on page 110
●
Chapter 7.3, "AF Spectrum Mode (Option R&S EVSG-K11)", on page 115
●
Chapter 7.4, "AF Time Domain Mode (Option R&S EVSG-K12)", on page 120
Remote command:
VIEW_VOR on page 260
● RF Level and Frequency Display............................................................................83
● IF Spectrum Preview...............................................................................................84
● VOR Main View.......................................................................................................85
● VOR Distortion View............................................................................................... 87
● VOR ID Analysis View.............................................................................................88
● VOR Recording View.............................................................................................. 90
6.3.2.1 RF Level and Frequency Display
The measured RF power and frequency of the input signal is displayed both numerically and graphically.
Figure 6-17: RF level display
83User Manual 1178.6227.02 ─ 05
Page 84

R&S®EVSG1000
Numeric Measurement Modes
VOR Mode (Option R&S
The following results are provided:
●
Numeric power level in dBm ("Lev")
For measurements on two frequencies: individual and sum power levels
●
Measured frequency offset to the nominal frequency in kHz
●
Numeric frequency offset of measured power
●
Numeric power sensor level in dBm (if available; "NRP")
●
Bargraph indicating the power and a color-coded overload state, where:
– red: overload state, check message
– yellow: power approaching overload state
– green: power in a valid range
●
If applicable: overload messages
Overload messages
The following messages indicate an overload:
●
"RF Overload"
Overload of the input mixer or of the analog IF path.
●
"IF Overload"
Overload of the IF signal.
●
"ADC Overload"
The dynamic range of the AD-converter is exceeded (clipping).
EVSG-K2)
A combination of these overloads is also possible.
In all cases, set the RF attenuation to normal or low distortion (for RF input), or reduce
the input level.
Remote commands to retrieve results:
LA? on page 202
FMEAS on page 266
RFCH on page 203
GET_MEASFREQ on page 273
GET_TX1_MEASFREQ on page 275
GET_TX2_MEASFREQ on page 277
GET_TX1_LEVEL on page 275
GET_TX2_LEVEL on page 277
6.3.2.2 IF Spectrum Preview
A preview of the measured spectrum (power level vs. frequency) for the IF (intermediate frequency) signal is provided. The center frequency is the nominal channel frequency. The frequency range shows the measured bandwidth. The power range is
selected such that the noise level remains visible.
84User Manual 1178.6227.02 ─ 05
Page 85

R&S®EVSG1000
Numeric Measurement Modes
Figure 6-18: IF spectrum preview
This preview spectrum allows you to check if the current measurement settings are
appropriate, such as the bandwidth or frequency offsets. For a larger, more detailed
spectrum diagram, select one of the graphical Spectrum modes. If you switch to such a
mode directly from a numeric measurement mode, the current measurement settings
are applied to the spectrum automatically.
6.3.2.3 VOR Main View
VOR Mode (Option R&S
EVSG-K2)
Displays the main measurement results.
Bearing (from)............................................................................................................... 86
AM 30 Hz...................................................................................................................... 86
AM 9960 Hz.................................................................................................................. 86
FM-Deviation.................................................................................................................86
ID Code.........................................................................................................................86
85User Manual 1178.6227.02 ─ 05
Page 86

R&S®EVSG1000
Numeric Measurement Modes
VOR Mode (Option R&S
Voice AM.......................................................................................................................86
Freq 30 Hz.................................................................................................................... 86
Freq 9960 Hz................................................................................................................ 86
Freq FM30.....................................................................................................................87
FM Index....................................................................................................................... 87
Bearing (from)
Phase between both 30-Hz signals (direction of the R&S EVSG1000 in relation to the
ground station).
Remote command:
BE on page 265
AM 30 Hz
AM modulation depth of 30 Hz AM rotational signal
Remote command:
AM0 on page 265
AM 9960 Hz
AM modulation depth of 9.96 kHz subcarrier
EVSG-K2)
Remote command:
AM1 on page 265
FM-Deviation
FM frequency deviation of 30 Hz subcarrier
Remote command:
FM0 on page 266
ID Code
Morse-decoded ID with three or four letters.
Remote command:
AC8 on page 242
AC8 on page 264
Voice AM
AM-Modulation depth of the voice signal (in the range 300 Hz to 3000 Hz, identifier
notched).
Remote command:
AM9 on page 265
Freq 30 Hz
AF frequency of 30 Hz AM rotational signal
Remote command:
AF0 on page 264
Freq 9960 Hz
Mean carrier frequency of the FM modulated subcarrier, typically at 9.96 kHz
86User Manual 1178.6227.02 ─ 05
Page 87

R&S®EVSG1000
6.3.2.4 VOR Distortion View
Numeric Measurement Modes
VOR Mode (Option R&S EVSG-K2)
Remote command:
AF1 on page 264
Freq FM30
AF frequency of the 30 Hz reference signal
Remote command:
AF2 on page 264
FM Index
FM frequency deviation of 30 Hz subcarrier
Remote command:
FM1 on page 266
This view comprises all measurement parameters for the determination of the distortion factors in the VOR mode.
Subcarrier Harmonics................................................................................................... 87
Subcarrier AM Distortion...............................................................................................88
Subcarrier Harmonics
Measures the distortions (up to 5th order) of the subcarrier harmonics.
"K2"
"K3"
Distortion 2nd order
Distortion 3rd order
87User Manual 1178.6227.02 ─ 05
Page 88

R&S®EVSG1000
Numeric Measurement Modes
VOR Mode (Option R&S EVSG-K2)
"K4"
"K5"
Remote command:
SUBCARR_K2 on page 266
SUBCARR_K3 on page 266
SUBCARR_K4 on page 266
SUBCARR_K5 on page 267
Subcarrier AM Distortion
Measures the AM distortion of the subcarrier. During signal generation, different
unwanted AM components appear. Peak 1 and Peak 2 display the largest unwanted
components.
"Peak 1 Freq"
"Peak 1 AM"
"Peak 2 Freq"
"Peak 2 AM"
Remote command:
DIST_9960 on page 265
6.3.2.5 VOR ID Analysis View
Distortion 4th order
Distortion 5th order
Displays the frequency of an unwanted AM of a VOR signal.
Displays the amplitude of an unwanted AM of a VOR signal.
Displays the frequency of an unwanted AM of a VOR signal.
Displays the amplitude of an unwanted AM of a VOR signal.
Displays the results of a morse signal analysis (optional).
88User Manual 1178.6227.02 ─ 05
Page 89

R&S®EVSG1000
Numeric Measurement Modes
VOR Mode (Option R&S
Bearing (from)............................................................................................................... 89
Last ID...........................................................................................................................89
ID Code.........................................................................................................................89
ID Period....................................................................................................................... 89
Dot Length.....................................................................................................................89
Dash Length..................................................................................................................89
Dot-Dash Gap............................................................................................................... 89
Letter Gap..................................................................................................................... 90
ID AM............................................................................................................................ 90
ID Freq.......................................................................................................................... 90
Bearing (from)
Phase between both 30-Hz signals (direction of the R&S EVSG1000 in relation to the
ground station).
Remote command:
BE on page 265
Last ID
Time since last ID pulse was measured
Remote command:
LASTID_TIME on page 250
EVSG-K2)
ID Code
Morse-decoded ID with three or four letters.
Remote command:
AC8 on page 242
AC8 on page 264
ID Period
Time between two measured ID pulses
Remote command:
ID_PERIOD on page 249
Dot Length
Length of time a dot is transmitted in the used Morse code in milliseconds.
Remote command:
ID_DOT_LENGTH on page 249
Dash Length
Length of time a dash is transmitted in the used Morse cod in milliseconds.
Remote command:
ID_DASH_LENGTH on page 249
Dot-Dash Gap
Length of time that passes between a transmitted dot and a dash in the used Morse
code in milliseconds.
89User Manual 1178.6227.02 ─ 05
Page 90

R&S®EVSG1000
Numeric Measurement Modes
VOR Mode (Option R&S EVSG-K2)
Remote command:
ID_DOTDASH_GAP on page 249
Letter Gap
Length of time that passes between two transmitted letters in the used Morse code in
milliseconds.
Remote command:
ID_LETTER_GAP on page 249
ID AM
AM Modulation depth of identifier signal (default: 1020 Hz).
Remote command:
AM8 on page 244
AM8 on page 265
ID Freq
Frequency of the morse signal.
Remote command:
AF8 on page 243
AF8 on page 264
6.3.2.6 VOR Recording View
The Recording view displays the recorded data for VOR measurements from the
selected data list (see "List" on page 176). If available, the stored GPS data from the
GPS receiver is also displayed.
90User Manual 1178.6227.02 ─ 05
Page 91

R&S®EVSG1000
Numeric Measurement Modes
VOR Mode (Option R&S
EVSG-K2)
Which measurement results are stored is described in the remote commands, see
GETDATADEF on page 314.
The individual measurement results are described in the other result views.
For details on data logging see Chapter 11.2, "Recording Measurement Data",
on page 174.
Remote commands for retrieving results:
GETDATADEF on page 314
GETDATASET on page 314
6.3.3 Configuring VOR Measurements
The following settings are available for VOR measurements.
Settings for recording, including trigger settings, are described in Chapter 11.2,
"Recording Measurement Data", on page 174.
● Signal Direction.......................................................................................................92
● Channel Frequency Configuration (CH FREQ).......................................................92
● Ampt........................................................................................................................93
● Bandwidth (BW)...................................................................................................... 94
● Setting the Measurement Time (MTime).................................................................95
91User Manual 1178.6227.02 ─ 05
Page 92

R&S®EVSG1000
Numeric Measurement Modes
6.3.3.1 Signal Direction
Access: [Config] > "Direction"
Access VNC: [s] > "F1"
Signal Direction
Defines the reference for phase notation (see Chapter 6.3.1.3, "Phase Notation in VOR
Measurements", on page 82).
"From"
"To"
Remote command:
SETUP:UNIT:VORDIRECTION on page 210
6.3.3.2 Channel Frequency Configuration (CH FREQ)
Access: [CH FREQ]
Access VNC: [q]
North direction at the VOR beacon
North direction at the receiver/ aircraft
VOR Mode (Option R&S
EVSG-K2)
The channel frequency determines the nominal frequency at which the measurement is
performed. For some avionics standards, the channels are associated with specific frequencies. (See Chapter A, "ILS Channel Frequency List", on page 322 and Chapter B,
"VOR Channel Frequency List", on page 324.)
CH.................................................................................................................................92
Freq...............................................................................................................................92
Step Size.......................................................................................................................92
CH
Sets the receiver frequency channel on the active receiver board according to the
ICAO frequency list.
Remote command:
RFCH on page 203
Freq
Sets the nominal frequency for the measurement. By default, this frequency is also
assumed to be the center frequency for spectrum displays, unless an offset is defined.
For measurements on two frequencies, the frequencies are defined as offsets to this
nominal frequency.
Remote command:
RF on page 203
Step Size
Defines the frequency step size for the rotary knob when setting the frequency.
92User Manual 1178.6227.02 ─ 05
Page 93

R&S®EVSG1000
Numeric Measurement Modes
In many avionics signals, channels are assigned to frequencies with a fixed offset. By
setting the step size of the rotary knob to the fixed offset, you can easily scroll through
the signal's channel frequencies using the rotary knob. Thus, for example, you can
analyze the measurement results for one channel after the other simply by changing
the selected channel frequency with the rotary knob.
The default step size for ILS/VOR mode is 50 kHz.
Remote command:
GS_DEFAULT_FREQSTEP on page 238
6.3.3.3 Ampt
Access: [AMPT]
Access VNC: [w]
The following settings define the amplification for the input signal.
RF Att............................................................................................................................93
RF Mode....................................................................................................................... 93
Transducer Correction...................................................................................................94
VOR Mode (Option R&S
EVSG-K2)
RF Att
Determines how the attenuation of the RF signal is defined. The attenuation should be
adjusted such that the measured power level remains in the valid level range (indicated
by the green area of the bargraph, see Chapter 6.1.3.1, "RF Level and Frequency Dis-
play", on page 49). Note that the valid level range depends on the selected measure-
ment mode.
"Manual"
"Auto"
Remote command:
SETATTMODE on page 203
SCOPE_ATTMODE on page 305
FFT_ATTMODE on page 300
IFSPECT_ATTMODE on page 295
The RF attenuation mode is specified manually (see "RF Mode"
on page 64).
The RF attenuation mode is selected automatically.
The signal attenuation is selected automatically according to the signal strength.
This mode works best with clean signals. In difficult receiving conditions, the "Low Noise", "Normal" or "Low Distortion" modes can be
more stable.
When monitoring signals with mostly constant signal levels, it is also
recommended that you use the "Low Noise", "Normal" or "Low Distortion" mode.
If the R&S EVSG1000 has to adapt the attenuation frequently, indicated by a frequent clicking noise from the attenuator, spikes can occur
in the trace.
RF Mode
Defines the RF attenuation mode to be used.
93User Manual 1178.6227.02 ─ 05
Page 94

R&S®EVSG1000
Numeric Measurement Modes
VOR Mode (Option R&S EVSG-K2)
"Low Noise"
"Norm"
"Low Dist"
Remote command:
SETATTMODE on page 203
FSCAN_ATTMODE on page 290
SCOPE_ATTMODE on page 305
FFT_ATTMODE on page 300
IFSPECT_ATTMODE on page 295
GBAS:ATTMODE on page 279
Transducer Correction
Configures the level correction. The specified value is added to the measured power
levels to compensate for an inherent offset by the measurement setup, for example the
antenna.
15 dB pre-amplification
Provides a high sensitivity. Suitable when scanning the area for distant signals.
0 dB
Provides a normal sensitivity.
15 dB attenuation
Provides a low sensitivity. Suitable when analyzing a nearby signal, to
avoid overload due to high-level signals.
6.3.3.4 Bandwidth (BW)
Access: [BW]
Access VNC: [e]
IF BW
Determines the frequency range for which the measurement is performed on the IF
signal.
Remote command:
VOR_DEM_BW on page 262
AM30 BW
Defines the filter bandwidth with which the 30 Hz AM rotational signal is demodulated.
Remote command:
VOR_DEM_AM_BW on page 261
FM BW
Defines the filter bandwidth with which the 30 Hz reference signal is demodulated.
Remote command:
VOR_DEM_FM_BW on page 262
Bear.Filt.
Defines the filter type used to determine the bearing angle.
"Narrow"
"Wide"
For small input levels
Faster; used in previous software releases
94User Manual 1178.6227.02 ─ 05
Page 95

R&S®EVSG1000
Numeric Measurement Modes
Remote command:
VOR_DEM_BEARFILTER on page 261
6.3.3.5 Setting the Measurement Time (MTime)
Access: [MTime]
Access VNC: [d]
The measurement time determines the interval at which new measurement results are
displayed. Internally, values are captured every 100 ms, that is: 10 per second. (With
the High Measurement Rate option R&S EVSG-K22 installed, the internal capture rate
is 10 ms, that is: 100 per second.) If the defined measurement time is longer, the values captured internally in that interval are averaged and only the average value is displayed.
Note that the measurement time determines the minimum interval for values to be
stored during recording (see "Time" on page 177).
Enter the time in milliseconds.
Remote command:
COM Mode (Option R&S
EVSG-K6)
MEASTIME on page 202
6.4 COM Mode (Option R&S EVSG-K6)
Access: [Mode] > "COM"
Access VNC: [m] > Down arrow key
If the COM Analysis option (R&S EVSG-K6) is installed, signals from VHF/UHF communication channels can be analyzed with the R&S EVSG1000. Very high frequency
(VHF) and ultrahigh frequency (UHF) communication is used for air traffic control (ATC
COM), for example.
The COM mode can be used to analyze both the civil aircraft band and military frequencies, with channels spaced at 25 kHz or 8.33 kHz.
The R&S EVSG1000 can perform COM measurements on signals containing one or
two carriers (see Chapter 6.1.4.1, "Channel and Frequency Configuration",
on page 60). It assumes a 1000 Hz test tone is being sent.
Remote command:
MODE_COM on page 268
6.4.1 COM Measurement Results
The COM measurement provides the following results. For measurements on two frequencies, the results for the individual frequencies and the sum of both are displayed.
95User Manual 1178.6227.02 ─ 05
Page 96

R&S®EVSG1000
Numeric Measurement Modes
COM Mode (Option R&S
EVSG-K6)
You can display graphical results directly from the COM mode by selecting the softkey
in the "Meas" menu. In this case, the settings for the current measurement are applied
to the graphical results.
To return from the graphical results to the COM mode, select "Return" ([F8]).
For details on the graphical results, see:
●
Chapter 7.1, "RF Spectrum Mode (Option R&S EVSG-K10)", on page 105
●
Chapter 7.2, "IF Spectrum Mode (Option R&S EVSG-K10)", on page 110
●
Chapter 7.3, "AF Spectrum Mode (Option R&S EVSG-K11)", on page 115
●
Chapter 7.4, "AF Time Domain Mode (Option R&S EVSG-K12)", on page 120
Remote command:
MODE_COM on page 268
● RF Level and Frequency Display............................................................................96
● IF Spectrum Preview...............................................................................................97
● COM Main View...................................................................................................... 98
● COM Recording View..............................................................................................99
6.4.1.1 RF Level and Frequency Display
The measured RF power and frequency of the input signal is displayed both numerically and graphically.
Figure 6-19: RF level display
The following results are provided:
●
Numeric power level in dBm ("Lev")
For measurements on two frequencies: individual and sum power levels
●
Measured frequency offset to the nominal frequency in kHz
●
Numeric frequency offset of measured power
●
Numeric power sensor level in dBm (if available; "NRP")
●
Bargraph indicating the power and a color-coded overload state, where:
– red: overload state, check message
– yellow: power approaching overload state
– green: power in a valid range
●
If applicable: overload messages
96User Manual 1178.6227.02 ─ 05
Page 97

R&S®EVSG1000
Numeric Measurement Modes
COM Mode (Option R&S
EVSG-K6)
Overload messages
The following messages indicate an overload:
●
"RF Overload"
Overload of the input mixer or of the analog IF path.
●
"IF Overload"
Overload of the IF signal.
●
"ADC Overload"
The dynamic range of the AD-converter is exceeded (clipping).
A combination of these overloads is also possible.
In all cases, set the RF attenuation to normal or low distortion (for RF input), or reduce
the input level.
Remote commands to retrieve results:
LA? on page 202
FMEAS on page 266
RFCH on page 203
GET_MEASFREQ on page 273
GET_TX1_MEASFREQ on page 275
GET_TX2_MEASFREQ on page 277
GET_TX1_LEVEL on page 275
GET_TX2_LEVEL on page 277
6.4.1.2 IF Spectrum Preview
A preview of the measured spectrum (power level vs. frequency) for the IF (intermediate frequency) signal is provided. The center frequency is the nominal channel frequency. The frequency range shows the measured bandwidth. The power range is
selected such that the noise level remains visible.
Figure 6-20: IF spectrum preview
This preview spectrum allows you to check if the current measurement settings are
appropriate, such as the bandwidth or frequency offsets. For a larger, more detailed
97User Manual 1178.6227.02 ─ 05
Page 98

R&S®EVSG1000
Numeric Measurement Modes
spectrum diagram, select one of the graphical Spectrum modes. If you switch to such a
mode directly from a numeric measurement mode, the current measurement settings
are applied to the spectrum automatically.
6.4.1.3 COM Main View
The COM Main view provides the following measurement results:
COM Mode (Option R&S
EVSG-K6)
Figure 6-21: COM Main view
You can display graphical results directly from the COM mode by selecting the softkey
in the "Meas" menu. In this case, the settings for the current measurement are applied
to the graphical results.
To return from the graphical results to the COM mode, select "Return" ([F8]).
For details on the graphical results, see:
●
Chapter 7.1, "RF Spectrum Mode (Option R&S EVSG-K10)", on page 105
●
Chapter 7.2, "IF Spectrum Mode (Option R&S EVSG-K10)", on page 110
●
Chapter 7.3, "AF Spectrum Mode (Option R&S EVSG-K11)", on page 115
●
Chapter 7.4, "AF Time Domain Mode (Option R&S EVSG-K12)", on page 120
98User Manual 1178.6227.02 ─ 05
Page 99

R&S®EVSG1000
Numeric Measurement Modes
COM Mode (Option R&S EVSG-K6)
Remote command:
VIEW_COM on page 269
AM Mod.........................................................................................................................99
AM Freq........................................................................................................................ 99
AM Mod
Displays the AM modulation of a 1 kHz test tone at the individual carrier frequencies
and for both carriers together.
Remote command:
GET_ONE_AMMOD_1_0 on page 273
GET_TX1_AMMOD_1_0 on page 274
GET_TX2_AMMOD_1_0 on page 276
AM Freq
Displays the demodulated frequency of the 1 kHz AM test tone at the individual carrier
frequencies and for both carriers together.
Remote command:
GET_ONE_AMFREQ _1_0 on page 273
GET_TX1_AMFREQ_1_0 on page 274
GET_TX2_AMFREQ_1_0 on page 276
6.4.1.4 COM Recording View
The Recording view displays the recorded data for COM measurements from the
selected data list (see "List" on page 176). If available, the stored GPS data from the
GPS receiver is also displayed.
99User Manual 1178.6227.02 ─ 05
Page 100

R&S®EVSG1000
Numeric Measurement Modes
COM Mode (Option R&S
EVSG-K6)
Which measurement results are stored is described in the remote commands, see
GETDATADEF on page 314.
The individual measurement results are described in Chapter 6.4.1.3, "COM Main
View", on page 98.
For details on data logging see Chapter 11.2, "Recording Measurement Data",
on page 174.
6.4.2 COM Configuration
In this view, the measurements settings available for the currently active mode, can be
configured.
● Channel and Frequency Configuration................................................................. 100
● Ampt......................................................................................................................102
● Bandwidth (BW).................................................................................................... 103
● Setting the Measurement Time (MTime)...............................................................104
6.4.2.1 Channel and Frequency Configuration
The ILS Localizer and Glidepath measurements can detect both course and clearance
carriers simultaneously. Alternatively, the individual carriers can be measured only, or
any one or two user-defined frequencies. By default, a wideband measurement is performed. The available measurement settings depend on the selected channel and frequency configuration.
100User Manual 1178.6227.02 ─ 05
 Loading...
Loading...