

Page 1

RS160D PMDC Servo Controller
Robot-Solutions, LLC
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide
Page 2

Table of Contents
Specifications ................................................................................................................1
Overview.........................................................................................................................2
Factory Default ..............................................................................................................3
Customization..............................................................................................................4
Channel Mixing (x).......................................................................................................5
Input Control Curve (C)................................................................................................5
Variable Brake (B)........................................................................................................5
R/C input dead band (i)................................................................................................5
Minimum Drive (M).......................................................................................................6
Power Slew Rate (s)....................................................................................................6
R/C input calibration.....................................................................................................6
Saving custom settings (w)..........................................................................................7
User Interface.................................................................................................................8
Internal Register Summary........................................................................................... 9
Internal Register Description......................................................................................12
Brake (B)....................................................................................................................12
Baud Rate (b).............................................................................................................12
R/C Input Curve (C)...................................................................................................12
Copy Parameters (c)..................................................................................................12
Derivative (velocity) Gain (D).....................................................................................12
Error Dead Band (d)...................................................................................................13
Back-EMF Factor (E).................................................................................................13
Encoder value (e).......................................................................................................13
Input Factor (F)..........................................................................................................13
Temperature Protection Override (f)..........................................................................14
Integral Gain (I)..........................................................................................................14
R/C Input Dead Band (i).............................................................................................14
Feedback Select (J)...................................................................................................14
Control Input Select (j)...............................................................................................14
Local Echo Option (l) .................................................................................................15
Minimum Drive (M).....................................................................................................16
Servo Mode (m).........................................................................................................16
R/C Pulse High Limit (N)............................................................................................16
R/C Pulse Low Limit (n) .............................................................................................17
Proportional (Position) Gain (P).................................................................................17
Position Set Point (p).................................................................................................17
Factory Preset (Q) .....................................................................................................17
Servo Update Rate (r)................................................................................................18
Power Slew Rate (s)..................................................................................................18
Torque Limit (T) .........................................................................................................18
Torque Set point (t)....................................................................................................18
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide
Page 3

Unit Amount Minimum Move (U)................................................................................19
Unit Amount Manual Move (u) ...................................................................................19
Velocity Limit (V)........................................................................................................19
Velocity Set point (v)..................................................................................................19
Write User Memory (w)..............................................................................................19
Channel Mixing (x).....................................................................................................20
Menu Items................................................................................................................... 20
Output Drive values.....................................................................................................21
Control Period..............................................................................................................21
Position & Encoder values .........................................................................................21
Velocity......................................................................................................................... 21
Torque .......................................................................................................................... 21
Tuning, discovering servo PID Gain values..............................................................22
Off Mode (0):..............................................................................................................22
PWM Mode (1):..........................................................................................................22
Torque Mode (2):.......................................................................................................22
Velocity Mode (3):......................................................................................................22
Position Mode (4):......................................................................................................23
Indicators and Outputs ...............................................................................................23
Status LED.................................................................................................................23
Temp LED..................................................................................................................23
COAST LED (Aux, Left & Right) ................................................................................23
FWD/REV LED (Aux, Left, Right)...............................................................................23
Limitations and Warrantees........................................................................................24
Support......................................................................................................................... 24
General Guidelines...................................................................................................... 24
Appendix A: System Software Updates..................................................................... 25
Appendix B: Input methods........................................................................................26
Control Input Methods................................................................................................26
Serial ......................................................................................................................26
R/C control .............................................................................................................26
Analog Signal .........................................................................................................26
Step & Direction .....................................................................................................26
Feedback Input Methods............................................................................................27
Encoder..................................................................................................................27
Analog Signal .........................................................................................................27
Appendix C: Interface Wiring Information.................................................................28
Analog........................................................................................................................28
Step & Direction.........................................................................................................29
Incremental Encoder..................................................................................................30
Manual Move .............................................................................................................31
Appendix D: Example applications............................................................................32
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide
Page 4

Factory Default...........................................................................................................32
Giant R/C Servo.........................................................................................................33
Set Up & Tuning .....................................................................................................33
CNC (Stepper motor) servo .......................................................................................35
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide
Page 5

Specifications
The RS160D servo uses custom software to implement a 2.5 channel high-powered
servo system. The servo uses a quadrature encoder feedback mechanism to control
torque, velocity, and position of the output.
• Enclosure size: 8.80” x 4.80” x 2.40” 3.40” high including fan
• Weight with enclosure: 2.5 lb.
• Three 5 pin finger latching encoder inputs.
• Dual main channels 160 Amps each
• Current limiting on both main channels.
• Thermal protection.
• Connector for external power driver module for third channel operation.
• 4-42v battery operation
• Large power connector accepts up to 0 AWG wires.
• Full RS232 serial command and setup.
• Standard RS232 communications N81- 4800,9600,19200 or 38400 baud.
• Serial boot loader for future RS232 servo software updates (no special
programming hardware required). See appendix A.
• Multiple-operating modes:
o Off
o Normal PWM
o Torque
o Velocity
o Servo-Winch-Position
o Servo-Position
• Thermal power monitoring and limiting.
• Manual control inputs (Up/Down) for each channel (Left, Right and Aux) to
facilitate rigging (DB9M). See Appendix B.
• User selected control inputs: Serial Command, Analog Voltage, R/C Pulse or
Step & Direction (CNC).
• User selected servo feedback: Encoder or Analog Voltage
• User adjusted hardware current limiting (Potentiometer adjustment).
• User adjustable software current limiting (Torque limit).
• Robust signal processing for smooth, reliable fail-safe operation.
• Indicator LED’s show direction, power, over-temperature, and board status.
1
.
1 If the main battery voltage is over 36V nominal, jumper J7 must be moved to the HV position and a second battery
for the logic supply must be connected to the HV SUPPLY connector. The HV supply can range from 4V to 36V.
Note the GND terminal on the logic supply and the GND terminal on the main power connector are tied together. If
tapping off of the center of a multiple series battery for the logic supply, do not provide a second ground to the logic
connector.
Robot-Solutions 2005 RS160D www.robot-solutions.com
Users Guide - 1 -
Page 6

Overview
The RS160D brushed Motor Controller provides a flexible platform for controlling
brushed DC motors. The controller has two power drivers built in and a standard
OSMC connector for a third power driver.
The default factory configuration supports operation with R/C radios for traditional
combat and remote control robotics applications. The factory default is easily modified
and stored in non-volatile (configuration) memory and restored whenever power is
applied. In factory default mode the Left R/C channel controls forward reverse motion
and the Right channel controls steering.
All configuration and control parameters are set via serial menus and configuration
strings. The serial interface supports standard RS232 signaling from 4800 to 38,400
baud using a normal DB9 cable. The entire unit may be configured and controlled via a
PC or Laptop using a terminal emulator (e.g. Hyperterm).
The RS160D supports a variety of servo operation modes (position, velocity, torque &
power) using a variety of input and feedback methods. The RS160D accepts the
following control input signals: serial commands, Analog voltage (0-5v), Radio Control
signaling or Step & direction. For servo feedback the RS160D accepts either analog
voltages (0-5v potentiometer) or quadrature encoders. Inexpensive industrial encoders
can be obtained from www.usdigital.com
with US Digital 5 pin finger latching cabling. The relationship between the various
control inputs output are set by serial configuration commands and the serial interface is
always available for adjusting parameters regardless of the operating mode.
Some examples of systems possible with the RS160D
1. A large R/C style servo can be created by combining the R/C control input with
the analog voltage feedback.
2. Using R/C input and encoders enables velocity control which is superior for
handling of remote control robots.
3. Serial input with encoder feedback enables machine controllable subsystems,
such as steering or brake controllers in large vehicles.
4. Step & Direction input with encoder feedback simulates large high powered step
motors with inexpensive PMDC motors. The step & direction interfaces directly
with CNC software.
The RS160D can store up to four unique sets of configuration data. The Controller
automatically loads the last saved or recalled set upon power up, supporting unattended
operation.
and the RS160D includes sockets compatible
Robot-Solutions 2005 RS160D www.robot-solutions.com
Users Guide - 2 -
Page 7

Factory Default
As shipped from the factory the RS160D firmware will boot into a default minimal
function mode. The feature set is as follows:
1. Basic PWM control: 95%
2. R/C input control, +/- 10us dead band.
3. Dual stick (no channel mixing).
4. Normal R/C calibration.
5. Mild input curve.
6. 100% brake with neutral command
7. .1 second power slew rate
8. Serial communications set at 38,400 baud.
At any time the user can reset the unit to the factory values with a simple command via
the terminal interface. The RS160D uses a standard DB9 RS232 cable and should
connect to any PC or laptop computer. Newer computers may only have USB
connectors and an inexpensive USB to Serial adapter may be used. Connect a terminal
emulator (Hyperterm) with the following settings:
• 38400 baud
• 8 bit no parity
• One stop bit
At the prompt type in the following characters:
@0sQ0<cr> (<cr> represents the ENTER key.)
If you desire single stick control type in the following string instead:
@0sQ1<cr>
NOTE: default values are not stored in non-volatile memory by default. You need to
write the values out before they “stick”. The command to do this is:
@0sw0<cr>
The non-volatile store and how to use it is described in a later section.
2
reverse to 95% forward power.
2
For reasons related to the hardware current limiting logic 100% power is not allowed.
Robot-Solutions 2005 RS160D www.robot-solutions.com
Users Guide - 3 -
Page 8

Customization
There are a variety of customizations that can be applied to the RS160D:
1. Channel Mixing for single or dual stick operation
2. Calibration of R/C inputs
3. Adjustable control curves
4. Control Dead band
5. Minimum Drive values for output
6. Variable braking when neutral
7. Variable power slew rate
8. Up to four different sets of customizations may be stored and recalled.
What follows are customizations that apply to the default factory configuration. These
registers are described in detail in this section and primarily apply to simple R/C control
of power – a typical remote control robot configuration. There is a complete description
of all customization registers further on in this document under Internal Register
Description.
In general, configuration parameters are entered in the following form:
@{channel}{s,g,a}{register}{value}
Each command starts with the @ character. The second character is a number
indicating which channel. The channels are numbered as follows:
0 Left R/C input or Power output
1 Right R/C input or Power output
2 Aux R/C input or Power output
3 Flip R/C input only
The third character indicates the operation:
s = set the value into the register
g = Get the value stored in non-volatile memory
a = Get the actual current operating value
Note: for some commands the programmed value is not acted upon until the system is
reset, hence the ‘a’ modifier.
The fourth character is the “register” that contains the value being adjusted
The final field is a signed decimal number (i.e. it can be negative). If this number is left
out a ‘0’ will be used instead.
All commands are terminated with a Carriage return (enter) <cr>.
Robot-Solutions 2005 RS160D www.robot-solutions.com
Users Guide - 4 -
Page 9

A typical command might be “Set Left Channel Drive 250” and would look like this:
@0sd250
The command to read the drive for the Left Channel and print it out would look like this:
@0gd
Channel Mixing (x)
Channel mixing is a global value not associated with R/C input channels or PWM output
channels. The “channel” value is ignored. The value can be either 0 (Tank) or 1
(Mixed). Mixing uses the Left channel as throttle and mixes in the Right channel as
steering. This is commonly used to implement single stick control for steering & throttle
in remote control robots.
@0sx0 – Disable Mixing
@0sx1 – Enable Mixing
Input Control Curve (C)
A variable exponential control curve can be applied to the R/C input. The curve value
applies to all channels. The amount ranges from 0, which is flat, to 7, which represents
a fairly aggressive curve.
@0sC{0-7}
The factory default is a mild curve of 3.
Variable Brake (B)
When control sticks are in neutral position the RS160D can apply a variable amount of
braking effort. Braking varies from 0 (coasting) to 31 (100%). Braking is regenerative
and will generate current and re-charge the supply battery. The string to set the brake
amount:
@{0, 1 or 2},sB{0-31}
Braking is specified independently for the Left, Right or Aux channels, hence the 0, 1 or
2 in the first field.
The Factory default is 100% brake
R/C input dead band (i)
Specifying the R/C input dead band can help prevent jitter when control sticks are in
neutral position. The dead band is specified in +/- microseconds.
Robot-Solutions 2005 RS160D www.robot-solutions.com
Users Guide - 5 -
Page 10

@{0, 1, 2, or 3}si{0-63}
Factory default value is +/- 10 microseconds.
Minimum Drive (M)
Often robotic drive systems have significant friction to overcome before the robot
moves. Minimum drive helps compensate for that by boosting the PWM values.
@{0, 1, 2}sM{0-255} Note: 10-25 are normal values
The best way to set this parameter is to use the serial interface to display drive values
and move the trim/stick until the drive train just starts to move; then record the values
and use that as a starting point.
Factory default is 0.
Power Slew Rate (s)
For high power systems suddenly changing power levels can introduce shock and or
large current draws. The former is hard on the mechanical system and the latter can
cause trouble with batteries. The RS160D has a variable power slew function that is
only active in PWM mode. The slew function specifies the time, in 1/10th second units; it
takes to move the output power from –100% to +100% (full reverse to full forward). Too
much slew can make the operation sluggish. For large kinetic energy weapons,
however, a large slew is needed to limit the inrush or regenerative braking currents as
the device accelerates or decelerates.
@{0, 1, or 2}sS{0-100} Note: a typical value is 0 to 10 for drive outputs.
The factory default is 1.
Note: Proper slew rate operation depends upon the default internal update rate of 50 Hz
and works only in the default PWM mode. Please do not modify the update rate if you
use this function. If you do modify the update rate be aware that the slew values will
need to be scaled appropriately.
R/C input calibration
The RS160D can be calibrated for the particular range of R/C pulse widths supplied by
the radio. Calibration can be done explicitly, where the user specifies the minimum and
maximum control pulse widths in microseconds, or calibration can be done by
discovery. In discovery mode the control sticks are moved to their extremes, and the
software records the minimum and maximum values.
There are two ways to enter and exit discovery calibration mode:
1. Press and hold the CAL button for more than 3 seconds.
2. Type in “Cal<cr>” on the serial port.
Robot-Solutions 2005 RS160D www.robot-solutions.com
Users Guide - 6 -
Page 11

Calibration mode is indicated by a 1 second periodic “wink” and a text message is
printed to the serial port. To exit calibration mode do one of the following:
1. Press and hold the CAL button for more than 3 seconds
2. Type in an ESC character on the serial interface
Exit mode is indicated by the status LED returning to its previous flash pattern and a
short message printed to the serial interface.
NOTE: Once calibrated, the values need to be saved in one of the user configuration
slots or they will be lost the next time the controller is powered.
Factory default values for all channels:
Minimum: 1.095 milliseconds
Maximum: 1.950 milliseconds
Although the allowable range is anywhere from 0 to 32 milliseconds, the controller will
only recognize pulse width values between 0.850 and 2.150 milliseconds long. The
recognized values are relaxed enough for all known R/C pulse gear including IFI robot
controllers.
Saving custom settings (w)
All settings and calibration is performed on the running system. When power is
removed, the current values are lost. The RS160D provides four non-volatile memory
slots for storing parameters. Four sets can be stored and the RS160D will restore the
last accessed slot whenever rebooting. Settings and calibrations are stored with the
following command string:
@{0, 1, 2 or 3}sw
When power is lost and restored, the RS160D will restore the last slot stored. If an
alternate slot is needed it can be recalled with the following command:
@{0, 1, 2 or 3}gw
After recall, if the power is lost, the RS160D will restore the last recalled or stored slot.
Robot-Solutions 2005 RS160D www.robot-solutions.com
Users Guide - 7 -
Page 12

User Interface
The host controller communicates through a standard DB9F RS232 serial port,
compatible with standard computers. In addition to entering in data in command
packets, the RS232 port supports basic line editing with the backspace key. The control
interface also has a simple menu system that allows immediate feedback about servo
performance.
Below is representative of the text printed to the serial port at power on. It includes
many of the commands and settings available. Please refer to appendix A for a
complete list of parameters.
RS160D-AGU
p<cr> Parameters
r<cr> Reset Servo (E-Stop)
a{#}<cr> Analog, # = Repetition Rate in responses per second
d{#}<cr> Drive
e{#}<cr> Encoder
S{#}<cr> Streamlined Parameters
t{#}<cr> Temp
v{#}<cr> Velocity
@<adx><mod><reg><val> Command Packet<cr>
<adx> 0 (left), 1 (right), 2 (aux)
<mod> s (set), a (actual), c (current)
<val> Decimal number (default = 0)
<reg> m: 0=off, 1=pwm, 2=torq, 3=vel, 4=Winch, 5=Position, 6=Alt
M: Minimum Drive value to move output. (Default=0)
d: Position Error Deadband (Default =255)
f: Thermal protection on=1/off=0 (volatile, can’t be stored)
p: Position Setpoint
u: Unit amount (for manual move)
U: Unit amount filter
r: Loop Rate (0-255)
t: Torque Setpoint (+/-255)
T: Torque Limit (0-255)
v: Velocity Set point
V: Velocity Limit
w: Write values to EEPROM
l: 0 no echo, 1 echo, 2 Machine I/O
c: copy from <adx> to <val>
? - help
>
On a unit with a corrupt or blank configuration the default-operating mode is 38400 baud
with local echo enabled. The local echo option repeats every character received so that
the user can see what they are typing.
The status of the non-volatile storage can be determined by the status LED on the
RS160D. It has two states:
Robot-Solutions 2005 RS160D www.robot-solutions.com
Users Guide - 8 -
Page 13

1. Blinking approximately once a second
Normal operation, non-volatile storage valid.
2. Blinking rapidly, approximately four times a second
Non-volatile storage corrupt, or never programmed after erase.
Examples of commands:
When fresh programmed, the non-volatile store will be corrupt and light flash rapidly and
the default baud rate is set to 38400. Change it to 19200:
>@0sb2 Set baud rate #3 (19200)
>@0sw Write configuration to EEPROM user slot 0.
>@1gb Reports stored baud rate (3).
>@1ab Reports operating baud rate (4).
The actual baud rate is the old value, 38400, until the unit has been power-cycled. The
current baud rate is the programmed value. Reset the unit to load the new baud rate.
Normally, the RS160D interface prints information in response to user input. However,
for most menu items (not @ registers), an optional repeat modifier may be specified to
cause the RS160D to periodically print out information. The repeat modifier is just a
number after the single character command. The number is the repetitions per second.
Internal Register Summary
Robot-Solutions 2005 RS160D www.robot-solutions.com
Users Guide - 9 -
Page 14

Notes
0-100% braking at zero drive only.
Funky: just copy servos
11.5 binary fraction:
32 bit number
Used to estimate torque
12.4 Number; Multiplier for Normalized R/C value used as set points for various servo
modes
11.5 binary fraction:
Serial, Radio, Analog, or Step/Dir
Encoder/Analog
Not Implemented (yet)
Minimum PWM drive to move output (De-dead band)
0 - Off, PWM, Torque, Velocity, Winch, Position, AltWinch, SpinMode1, SpinMode2, Relay
Input to Position control loop
11.5
Loop rate in milliseconds, 0 = off
0-10 sec by .1 sec; Time to slew from -100% to 100% power
Input to Torque control loop
0-100% pwm.
In Encoder Counts (position error dead band for Step/Dir interface)
In Encoder Counts
Input to Velocity control loop
Encoder counts/loop
Applies
to
0 CH 0-2
0 CH 0-2
0 CH 0-2
32768
32768
0 CH 0-2
32768
0 CH 0-2
0 CH 0-2
0 CH 0-2
0 CH 0-2
0 CH 0-2
0 CH 0-2
0 CH 0-2
0 CH 0-2
10 CH 0-2
32768
32768
0 CH 0-2
32768
32768
32768
+/- uSeconds around zero
R/C Pulse width
R/C Pulse width
Left/Right Off, On.
RC 0-3
RC 0-3
2150
2150
4800, 9600, 19200 and 38400
Volatile, enabled after reset.
Function Lower Upper Default
Servo B Brake 0 31 31 CH 0-2
c Copy values Global
d Position Error Dead band -255 255
D Velocity Error Gain -32768
e Position (encoder) -2.00E+09 2.00E+09 0 CH 0-2
E Back-EMF factor -32768
F Input Factor -32,000 32,000 8 CH 0-2
I Integral Error Gain -32768
j Input Select 0 3 0 CH 0-2
Unit amount for minimum
move. -32768
J Feedback Select 0 1 0 CH 0-2
L Position Limit -2.00E+09 2.00E+09 CH 0-2
M Minimum Drive -255 255
m Mode 0 6 1 CH 0-2
p Position Set point -2.00E+09 2.00E+09 0 CH 0-2
P Position Error Gain -32768
r Servo loop rate 0 255
s Power Slew 0 100
t Torque Set point -255 255
T Torque Limit -255 255
u Unit amount for manual move -32768
U
v Velocity Set point -32768
V Velocity Limit -32768
Radio C Input Curve 0 31 Global? i Input Dead band 0 63 RC 0-3
n Low Limit 850
N Upper Limit 850
x Mixing 0 1 Global
Misc b Baud Rate 0 3 Global
Robot-Solutions 2005 RS160D-AGU-10K www.robot-solutions.com
Users Guide - 10 -
f Temperature Protection 0 1 Global
Page 15

Notes
Not implemented
no echo, echo, machine mode
R/C PWM mode, straight or mixed
s = set, a = current slot, g = get slot
Applies
to
Write/Load values to/from
EEPROM 0 3 Global
Function Lower Upper Default
* Enter Boot-loader n.a. n.a. n.a. n.a.
l User Interface Mode 0 2 Global
Q Compatible Preset 0 1 Global
w
User Interface/Menu "Cal" Enter R/C Calibration mode @ Enter/Print register values d PWM Drive e Encoder count ESC Exit R/C Calibration mode i R/C input in uS I R/C input, Normalized p Print Parameters r Reset Servo (stop) S Streaming parameters t Temperature v Velocity (counts/loop)
Robot-Solutions 2005 RS160D-AGU-10K www.robot-solutions.com
Users Guide - 11 -
Page 16

Internal Register Description
The following is a summary of commands used to set and query internal registers of the
RS160D. Most commands operate on channels and apply (or print) values. A few
commands have no register value. Please reference Customizations, under Factory
Defaults, above, for details of the register command format.
Brake (B)
Range: 0-31 representing 0% to 100% brake.
Default: 31
Only applies when output drive is neutral (0% drive) on channels 0, 1 and 2 (Left, Right
and Auxiliary).
Baud Rate (b)
Range: 0-3 representing the following baud rates:
0. 4800
1. 9600
2. 19200
3. 38400
Default: 3 (38400)
Changes to baud rate take effect after the system is reset by a power cycle. Channel
value must be 0, but is otherwise ignored. Remember to save new baud rate in User
Memory with the ‘w’ register.
R/C Input Curve (C)
Range: 0-7
Default: 3
Selects an exponential curve to modify the R/C input signal. Curves are useful for
greater control of simple power based robots. 0 represents a flat line and 7 represent’s
an aggressive curve.
Copy Parameters (c)
Range 0-3
Copies the contents of registers for channel N to Y. Example to copy parameters from
the Left register bank to the Right:
@0sc1
Derivative (velocity) Gain (D)
Range: 0-1023
Default: 0
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 12 -
Page 17

Derivative gain is an 5.5 binary number that determines how strongly the servo attempts
to maintain a velocity setpoint.
See Tuning Servos, below, for more information about this value.
Error Dead Band (d)
Range: 0-255
Default: 0
Back-EMF Factor (E)
Range: 0-255
Default: 0
Back-EMF is used to estimate the torque. The back-EMF factor is calculated by
dividing 8196 by the maximum velocity at 100% drive (255). This is just an estimate as
many PMDC motors have non-neutral timing and thus different back-EMF factors in
reverse. If your motor has non-neutral timing, just take the average between forward
and reverse velocity (ticks/period)
This factor can also be used to compensate for friction. The way to do this is to set the
servo into the Torque mode with a torque set point of zero. Then adjust the Back-EMF
gain until the system feels frictionless. When too large, the output, when disturbed, will
accelerate. If too low, it will slow down and stop. When just right it will continue in the
same direction and speed indefinitely (e.g. "frictionless). Make sure you test at fairly
high velocities as the back-EMF values are inaccurate at low velocities.
Typical back-EMF factors are in the 8-30 range.
Encoder value (e)
Range: +/- 2 billion
Default: 0
This register contains the current encoder value, often thought of as position. By
writing this register the position can be set to any value. The value in this register will
be restored when loading user parameters. So, if you want the default, boot value to be
zero, then zero this register before saving user parameters.
The RS160D encoder input implements a 2X quadrature decoder. One multiplies the
encoder slot count (e.g. 64) by 2 to determine the total number of counts per revolution.
Input Factor (F)
Range:
Default: 0
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 13 -
Page 18

The number multiplied by the selected input method (R/C or Analog input) to generate
the appropriate control value. This number is divided by 32 after the multiplication so
fractional values may be specified. See Appendix B for more information on input
methods.
Temperature Protection Override (f)
Range: 0 & 1
Default: 0
This register allows temporary override of temperature fold back function within the
RS160D. When set to 1 fold back is disabled and full power can be delivered
regardless of the heat-sink temperature of the power driver. This value is volatile,
meaning it cannot be saved and will be reset to zero after each power cycle.
Integral Gain (I)
Range: +/- 32,000
Default: 0
Integral gain is used in the PID calculation for correcting velocity errors. See
See Tuning Servos, below, for more information about this value.
R/C Input Dead Band (i)
Range: 0-255 uS
Default: 10 uS
R/C input dead-band is specified in microseconds. The specified value will be used +/around zero. The default value is +/- 10 uS around 1500 uS.
Feedback Select (J)
Range:
0. Encoder
1. Analog Voltage (0-5v)
Default: 0 (Encoder)
The J registers selects the feedback method for the servo controller. Analog feedback
is typically a 10-100k ohm linear potentiometer connected between ground and +5v.
The encoder method uses standard, inexpensive, industrial quadrature encoders to
determine direction and speed of rotation.
See Appendix B for more details on input and feedback methods.
Control Input Select (j)
Range:
0. Serial command
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 14 -
Page 19

1. R/C input
2. Analog Voltage (0-5v)
3. Step & direction input
Default: 1, R/C input
See Appendix B for more details on input and feedback methods.
Local Echo Option (l)
Range:
0. No Echo
1. Echo typed characters.
2. Special Machine interface mode.
Default: 1, echo typed characters.
The serial interface includes a line editor that supports backspace and escape (cancel).
The editor can optionally disable character echo for machine interface (where a
computer simply sends commands, not expecting data returned). There is a third
method that facilitates machine communications while echoing the entire command line
AFTER it has been processed.
Besides echo & no-echo, there is a third mode that implements a machine friendly
interface to the @ commands. This interface does not echo received characters. After
processing the command the interface echo’s the original string, with the ‘@’ replaced
with a special character and post-pended with data, if any. The special characters are:
1. ‘!’ - Error response (i.e. didn’t recognize the command)
2. ‘*’ - Normal, Ok response (no data)
3. ‘#’ - Normal, OK response, data follows.
The Set Local Echo command is used to enter this mode and it can be saved in
EEPROM like other parameters. Specifically, the following will place the unit in the
special interface mode:
>@0sl2
*0sl2
Note the effect is immediate (i.e. the response is the new acknowledge string), but the
command still needs to be stored to be active after the next power up.
Example, Set Encoder value:
Send: @0se1234<cr>
Get: *se1234<cr>
Example, Get Actual Encoder Value:
Send: @0ae<cr>
Get: #0se1234<cr>
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 15 -
Page 20

Example, Get encoder value from invalid address:
Send: @2ae<cr>
Get: !2ae<cr>
Minimum Drive (M)
Range: 0-255
Default: 0
Minimum drive specifies an amount of drive to add to the output in order to overcome
drive train friction. See, Customizations, above for more details.
Servo Mode (m)
Values:
0. Off
1. PWM
2. Torque
3. Velocity
4. Position Mode using winch (no back-drive)
5. Position Mode (position with back-drive)
Default: 0, off.
Servo mode selects the operation of the servo. A description of each mode can be
found in Tuning Servos, below.
A note about Winch position mode: when a worm gear drive is used for a servo
transmission, the output cannot be back-driven. I.e. torque on the output shaft cannot
be transmitted back to the servo motor. Winch drive recognizes this special case and
resets the PID Integral error term when the drive reaches the position set point.
Normally, the integral error term is needed to hold back-drivable servos in position once
the set point has been achieved.
R/C Pulse High Limit (N)
Range: 0-32,000 uS
Default: 1950 uS
The R/C pulse limits are the calibrated values for +/- 100% input. Normal R/C pulse
range is 1.0 to 2.0 mS, with 1.5ms as the zero value. By selecting alternate high and
low values the range of -100% to 100% can be shifted and scaled. The default values
are suitable for most off the shelf R/C gear.
Note: despite the large range of limits available, the RS160D will only recognize pulse
width values between 850 and 2150 uS as valid.
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 16 -
Page 21

R/C Pulse Low Limit (n)
Range: 0-32,000 uS
Default: 1050 uS
See R/C Pulse High Limit for description of register.
Proportional (Position) Gain (P)
Range: +/- 32000
Default: 0
The RS160D servo uses the P register to determine the correction needed for a given
error between actual and commanded positions. This value Proportional Error Gain
term in the PID calculation.
See Tuning Servos, below, for more information about this value.
Position Set Point (p)
Range: 0- +/- 2 billion
Default: depends
Position set point is the value that the servo drives to when in position mode. It is in
encoder counts (see Encoder, above). The default value is equal to the default value
of the encoder. If a non-zero value is stored for the Encoder, then that value will be
used for the initial position value as well. The default behavior prevents uncontrolled
servo movements when power cycling the RS160D.
Factory Preset (Q)
Values:
0. No mixing
1. Mixing enabled
Default: 0
The Factory Preset register resets all registers to a known default configuration. The
optional value selects whether mixing is enabled or not. The default configuration is as
follows:
• PWM output mode
• 50 Hz update rate (20 mS period).
• R/C input selected
• 1.050 to 1.950 ms R/C calibration range
• 1/10 second slew
• 100% brake at neutral stick position
• Mild #3 curve
• All other registers set to default values.
Note: The default setting for corrupt (or brand new) user storage is Q0.
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 17 -
Page 22

Servo Update Rate (r)
Range: 0-255 mS
Default: 0 mS
This value sets the basic loop rate for the servo calculations. Most all other parameters
and values depend upon this value. Values can range from 0 (off), to 1 (1 kHz) to 255
(about ¼ Hz).
Power Slew Rate (s)
Range: 0-100
Default: 1
Power slew affects how fast the drive value can change. The value represents 1/10’Th
of a second for -100% to 100% power change. The default value takes 1/10’Th second
to slew the power from full forward to full reverse. Power slew rate only affect servo
mode 1: PWM and requires an update rate of 50 Hz to work properly.
Torque Limit (T)
Range: 0-255
Default: 0
Torque Limit used in conjunction with Back-EMF factor (E) can fairly accurately limit the
maximum current draw, and thus torque, of the drive motor. At stall, zero velocity, zero
back-EMF, 100% drive (255) will produce maximum torque and current draw.
Fractional drives will produce fractional torque and current draw. When the motor is
rotating, the back-EMF counters the drive, reducing torque and current. In order to
maintain constant torque (and current draw) over a wide range of velocities, it is
necessary to add the drive value to the back-EMF value. As the velocity increases, the
overall drive will increase to maintain the torque.
The torque limit sets how much additional drive is allowed above the back-EMF value.
The additional amount divided by 255 is the fractional amount of the stall current (and
torque) that will be generated.
An additional note: torque and rotational mass will determine acceleration and
deceleration time for the servo. By limiting torque, one can control acceleration and
deceleration of the servo. Or, one can limit maximum current draw, thus preventing
circuit breakers from tripping.
Torque Set point (t)
Range: 0-255
Default: 0
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 18 -
Page 23

The torque value used in servo Torque mode. In any other mode this value is either
ignored, or continuously overwritten by the higher level servo algorithms (Velocity, to be
exact).
Unit Amount Minimum Move (U)
Range: +/- 32,000
Default: 0
This register is in encoder counts and can be used to smooth rapid small input changes
by preventing a move from starting until a certain absolute change has been noted in
the set point. This register only affects position servo modes.
Unit Amount Manual Move (u)
Range: +/- 32,000
Default: 0
The RS160D has inputs that can be used to manually slew the servo position without
changing any internal parameters or set points. This is useful for setting “zero” points
on servo controlled equipment as the RS160D does not have limit or zero switch inputs.
Refer to Appendix C for a wiring diagram for manual move inputs.
Manual move only works in mode 0 (safety reasons). When a manual move switch is
closed the RS160D temporarily switches to position mode and makes the move. A
short while after the move the RS160D returns to mode 0 (off). Closing the manual
move switches in any other mode has no effect.
Velocity Limit (V)
Range: +/- 1023
Default: 0
The velocity limit controls how fast the RS160D moves the output to a new position set
point. Velocity is in terms of encoder counts per servo update period.
Velocity Set point (v)
Range: +/- 1023
Default: 0
This register sets the velocity set point when in velocity servo mode. When in position
modes, the position servo sets this value while moving to a new position. Setting this
value in any mode other than position servo has no effect. It can be read at any time.
Write User Memory (w)
Range: 0-3
Default: 0
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 19 -
Page 24

This command does not have a parameter. The channel number (0-3) is used to select
one of four memory slots to store custom parameters. The last slot referenced (either
written or recalled) will be used for initialization in future power cycles.
Channel Mixing (x)
Values:
2. No mixing
3. Mixing enabled
Default: 0, No mixing.
Channel mixing is typically used in R/C control situation where a single stick is used for
throttle and steering. When enabled, mixing uses the LEFT channel for throttle and the
RIGHT channel for steering.
Menu Items
• a{c#}<cr>
Displays analog channel inputs 0-7. This command is not too useful since
only channels 6 & 7 are used and are displayed better with the ‘t’ command.
{c#} is a modifier. If you enter “a5c<cr>” the analog values will be
continuously displayed five times per second..
• d{c#}<cr>
Displays output drive value. The servo uses an eight-bit PWM hardware for
255 levels of output. So, 0 to 255 represents 0-100%. Negative numbers are
reverse power. Again, the “c#” modifies the command for continuous output.
• E{c#}<cr>
Displays encoder values. Useful for checking operation of the encoder and
verifying that the wiring is correct. Positive PWM shaft rotation needs to
produce positive encoder changes.
• p<cr>
Print out a short summary of all servo parameters and current operating
conditions. See section on tuning for more details.
• P<cr>
Print out a summary of the R/C parameters and current operating conditions.
• S{c#}<cr>
Displays streamlined parameters. The parameters include the following in the
order shown.
$<Left Mode> <Right Mode> <Left Encoder> <Right Encoder> <Left
Velocity> <Right Velocity> <Left Torque> <Right Torque> <Left Drive> <Right
Drive> <HS1 Temp> <HS2 Temp> <Left over current> <Right Over current>
<CR>
Note: the left and right over current values are latched upon the over current
event and are not cleared until printed with the next S command.
• T{c#}<cr>
Print out the current temperature of the power driver heat sink. The RS160D
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 20 -
Page 25

starts to fold back the power levels at 60 deg C and fully shuts off the driver
above 130 deg C. The fan will turn on at temperatures over 40 deg. C.
• V{c#}<cr>
Displays the current velocity. Velocity is the change in encoder value per unit
time. See tuning, below, for more details.
• @<…>
Machine commands used to control the servo.
Output Drive values
The RS160D uses 8 bit PWM hardware. It uses values from 0 to 255 to represent 0 100% drive. Drive can also be in reverse. Hence, drive (PWM) values are specified
from -255 to 255.
Control Period
Control cycle period (r) is a whole number from 0 to 255 that is a multiplier of the basic 1
millisecond system tick rate, or 0 to .255 second period. When 0 the servo mechanism
is disabled and the output allowed to coast.
Position & Encoder values
Position is in terms of the encoder counts. The encoder resolution * 2 gives the total
number of counts per revolution.
Velocity
Velocity is in terms of encoder counts/loop period. It depends upon the loop rate and
the encoder resolution. For example with 120 rpm, no load maximum shaft speed and
an encoder resolution of 100ppr, quadrature decoding, a 10 ms loop rate gives the
maximum of (120rpm/60) * (100cpr * 2) * 10ms = 4. This is not useful, so the loop rate
needs to be stretched out to 100ms for a maximum velocity of 40. It is an engineering
decision whether to increase the encoder resolution or increase the loop period in order
to get reasonable range of velocity. In this example whether to increase the period, or
increase the Pulses per Revolution (ppr) of the encoder would be determined by the
rotational mass of the system: light systems that react fast need fast loop rates, thus
higher ppr. Large slow to accelerate systems might get away with a longer loop rate.
Torque
Torque Set point is a dimensionless number from 0-255, with 0 = no torque and 255
being 100% at stall. It is determined by the internal 8-bit PWM hardware.
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 21 -
Page 26

Tuning, discovering servo PID Gain values
Start with zero for all parameters before enabling the servo. Then precede through the
various servo modes to adjust each gain value. In the instructions that follow, the
commands are referenced by their register name. A full command must be used to set
the value of the register.
Off Mode (0):
Zero all gain parameters (P, D, I and B) and command values (v, V, p, t and T)
PWM Mode (1):
1. Set mode (m) to 1
2. Set torque set point (t) to 255 and measure velocity.
3. Adjust loop rate (r) for a maximum velocity between 50 and 1023. The actual
best value will depend upon the resolution of the encoders and the mass of the
drive train and torque capabilities of the motor. Some experimentation may be
required.
4. Repeat for a torque set point of -255.
5. Set the back EMF gain (B) to 8196 divided by the average max velocity e.g.
(8196 * 2) / (V forward + V reverse).
Torque Mode (2):
Adjust Back EMF (B) gain until the unit feels frictionless. The motor should be easy to
spin both forward and reverse. Most PMDC motors have different back-EMF constants
for forward and reverse, so some compromise is needed. If it is difficult to tell, then
simply leave it at the calculated value. Otherwise adjust the calculated value until the
entire mechanism feels relatively frictionless. By increasing the calculated value of B
friction within the mechanism can be partially compensated.
Be careful, too much extra Back EMF can cause instability in the servo operation. At
low speeds slip-stick friction needs extra Back-EMF to overcome, but this becomes too
much at higher speeds and can cause oscillations. It is better to use Minimum PWM
value to compensate for low speed slip-stick friction.
Velocity Mode (3):
1. Set the torque set point (T) to maximum (255).
2. Adjust velocity gain (D) until shaft is difficult to turn, but does not oscillate.
Usually 1/2 of the value that causes oscillations is pretty good.
3. Adjust Velocity Integral gain (I) until shaft becomes very stiff, but again without
any oscillations. It should return to the zero position after any displacement.
4. Set the velocity SP (v) to some small value and verify that the motor turns slowly
and smoothly. Some playing around with the D and I terms may be needed. If
the system does not seem tight enough, experiment with faster loop rates.
Adjust the previously discovered values by the change in loop rate (i.e. if 1/2 the
period, then double the gains, etc.).
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 22 -
Page 27

Position Mode (4):
1. Set velocity set point (v) to the maximum recorded in PWM mode.
2. Adjust position gain (P) so shaft is very stiff, but does not oscillate. Usually very
small position gains are needed (i.e. 1-16).
3. Reduce velocity set point to whatever maximum is required.
4. Experiment with driving the system to various positions using both low and high
velocity limits. Verify smooth, oscillation free operation for each condition.
Whenever modes are changed, various parameters may be reset. In particular, the
Integral error term is reset and the encoder position is forced to the current position set
point (if the new mode is position servo).
Upon boot, configuration parameters are read out and set (assuming no checksum
error) and the encoder positions are initialized to the current set point. The servooperating mode is always set to OFF. Changing from OFF to one of the various servo
modes will cause the encoders to be reset to the current position set points.
Indicators and Outputs
Status LED
This LED winks once per valid channel per two-second period. With all four channels
connected it appears like four rapid flashes and a long pause. When in calibration
mode the LED flashes evenly without pause.
Temp LED
This LED is off under normal conditions and will start to flash as the temperature of the
controller increases to the point of thermal power foldback. A faster the flash indicates
a hotter temperature. Once the critical shutdown temp is reached the led will stay on
until the temperature drops and the controller resumes operation.
COAST LED (Aux, Left & Right)
Illuminated (Red) indicates the controller has disconnected the power driver from the
load. The load is coasting. Dark indicates the power driver connected to the load. This
LED varies from fully illuminated to fully dark depending upon the position of the input
signal and the BRAKE user adjustment.
FWD/REV LED (Aux, Left, Right)
Green = Forward, Yellow = Reverse. Dark = zero drive. The RS160D modulates the
Coast signal to implement variable brake. When the power driver has zero drive and
zero COAST (i.e. both LED’s are dark) maximum braking is applied to the load.
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 23 -
Page 28

Limitations and Warrantees
Robot-Solutions, LLC (robot-solutions.com) provides no warrantee of suitability or
performance for any purpose for the RS160D. Use of the RS160D software and or
hardware is with the understanding that any outcome whatsoever is at the users own
risk. Robot-Solutions, LLC sole guarantee is that the software and hardware performs,
to the best of our knowledge, in compliance with this document at the time it was
shipped.
Support
For additional information and or support send an e-mail to:
mailto:Support@Robot-Solutions.com
General Guidelines
• Caution does need to be taken with the use of the RS160D as with any other
motor controller. In rare cases where the motor controller fails, it can lock in the
“ON” position with no ability to stop the motor that is being controlled. All users
should utilize a safety disconnect to the main power to allow for the safe
disconnect of the power.
• Never remove the power to the motor controller while the motor is running. This
may damage the controller.
• While it was designed to withstand significant abuse, normal static handling
procedures should be observed.
Copyright ©2005 Robot Solutions, LLC
Copyright©2003-2005 Barello.net, Inc.
Author: David Moeller, Larry Barello
Contact info: David@Robot-Solutions.com
Larry@barello.net
Contact the author with problem reports or fixes, feature requests or additions and
questions. They are welcomed and will be incorporated as time permits
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 24 -
Page 29

Appendix A: System Software Updates
The RS160D includes a boot loader program to facilitate software updates vie the
RS232 port. No special programming hardware is required. The only requirement is a
PC with a serial port. The procedure is as follows.
1. Connect the RS160D to the com1 port on the PC and verify the connection by
using a terminal emulator to interact with the user menu.
2. Unzip the update software to the PC with the included Bootloader.zip file.
3. If necessary, copy the new software to be uploaded into the RS160D to that
directory.
4. Open “My Computer” and browse to the directory where the file was unzipped.
5. Double click the cmdprompt.cmd program. This will bring up a DOS window.
6. Type the following command, “update RS160D.hex” substituting the new
software file name where appropriate.
7. The program will start uploading, and you should see the status bars go to 100%.
8. When you see “avrdude done. Thank you!” exit the DOS window and the
software should be loaded and ready to use.
9. If you need to use a different com port, edit the file “update.cmd” appropriately.
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 25 -
Page 30

Appendix B: Input methods
Control Input Methods
The RS160D features a variety of control and feedback mechanisms. These
mechanisms can be independently assigned to each channel. Thus, an R/C receiver
can control a servo with an analog feedback, or a step & direction input can control the
position of an encoder feedback servo. Some operating modes won’t work properly
with certain feedback mechanisms. For example, using analog feedback with a velocity
servo as the analog feedback signal has mechanical and electrical limits.
When using analog or R/C input methods the input values must be transformed into
values suitable for servo operation. This is done with the @f command. The register
value is multiplied by the input value and then divided by 32 to obtain the results. The
results are then applied to the selected servo set point.
Serial
Besides configuration setup, all servo set point parameters are accessible via the serial
interface using @ commands. Note: depending upon servo mode, some set points are
overwritten by the servo. For example, the position servo continuously updates the
velocity set point to achieve the position goal. The serial interface can be used to
examine the current velocity set point, but not to modify it.
R/C control
Standard hobby radio control equipment or equipment that conforms to the R/C
signaling standards can be used to input a +/- 1023 count signal. This value controls
selected set point parameters with a conversion factor. A typical use implements a
giant R/C servo: the R/C input controls a large servo motor with a potentiometer
feedback for position.
The R/C signaling standard calls for 1.0 to 2.0ms pulse width with a 20ms repetition
rate. The RS160D can correctly decode pulse widths from .850 to 2.150 ms and as fast
as 300 Hz repetition rate, on each channel. The factory default calibration sets the +/100% value to 1.050 to 1.950 ms, respectively. The default values should be
compatible with all off the shelf R/C gear. The RS160D includes a calibration method to
adjust the default limits or the serial interface can directly set the +/-100% timing.
Analog Signal
Analog signals are 0-5v values that are converted into a +/-2047 count signal. See
Feedback Methods, below, for important information about analog signals.
Step & Direction
Step & Direction input simulates a stepper motor interface, commonly found on CNC
machinery. Each step moves the input function one encoder count.
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 26 -
Page 31

Feedback Input Methods
Encoder
Industry standard quadrature encoders using 2x decoders (i.e. the resolution is twice
the slot count). There is no support for index marks or limit switches. The RS160D can
support up to three channels of encoder with a maximum sustained encoder count rate
of 100 kHz, shared by all channels. If two channels are active, both can count up to 50
kHz simultaneously. The wiring information for the RS160D connectors can be found
here:
http://www.usdigital.com/products/connect/5pin-finger-latching.shtml
Analog Signal
Analog feedback signals are 0-5v converted into a +/- 2047 count value. The internal
converter has only 1024 values. A digital filter used to reduce noise, produces a 4096
count intermediate value which supplies the feedback and control registers. This works
reasonably well, HOWEVER, NOTE WELL: if the analog signal is very clean and noise
free only 1024 distinct values can be detected. So, even though the system works with
a +/- 2047 value, the control resolution is only +/- 511 counts.
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 27 -
Page 32

Appendix C: Interface Wiring Information
Analog
Analog signals are shared with the JTAG programming interface (non-latched 10 pin
connector behind the AUX OSMC connector). The above interface can be used for
mechanical (potentiometer) connections.
Other direct analog signals can be connected directly to the header using normal CMOS
analog signal considerations. The +5v and ground supplies are regulated and filtered
on the RS160D controller. A reasonable amount of current (50-200 ma.) may be drawn
from these supplies to power off board electronics.
There are two more channels available for the AUX servo, but these signals are not
physically available on the RS160D controller.
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 28 -
Page 33

Step & Direction
The CNC interface (Step and Direction) uses the Radio Control and Manual Move
interface to supply the input signaling connections. The Radio Control connectors
provide the high speed step input and the manual move interface provides the direction
input and following error outputs for each channel.
The following error is a normally open (NO) CMOS output. The three channels are
wired together to provide an overall NO error output. The output is not protected
against voltage overloads: DO NOT CONNECT THE OUTPUT TO A POWER SOURCE
GREATER THAN 5.0 VOLTS OR YOU WILL DAMAGE/DESTROY THE RS160D.
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 29 -
Page 34
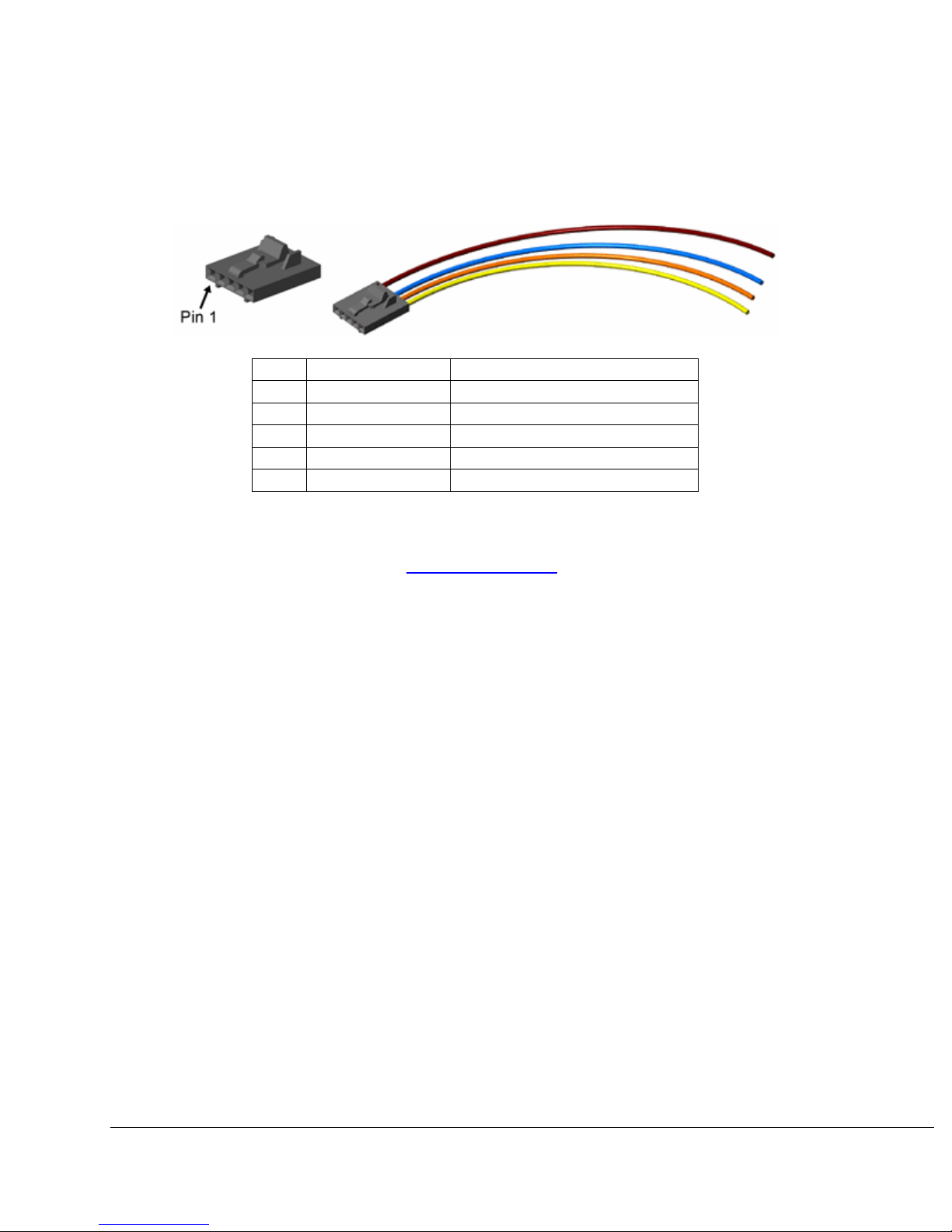
Incremental Encoder
The RS160D uses AMP MTA 5 pin Male sockets wired for US Digital Encoder standard
cables. The pin-out matches the typical HEDS encoder electronics used in the US
Digital encoders.
Pin Description Color (typical)
1 Ground Brown or Black
2 NC No Connection
3 A channel Blue or White
4 +5VDC power Orange or Red
5 B channel Yellow or Brown
Figure 1 Typical encoder cable
MTA connectors are standard .1” spacing and suitable cable assemblies can be made
from inexpensive socket parts from www.Jameco.com and others.
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 30 -
Page 35

Manual Move
The manual move interface allows positioning of encoder based servos when the servo
is disabled. The Manual Move Unit Amount (u) register controls how far the servo
moves with each button press. The servo mode must be OFF and the servo tuning
registers properly set for this function to work.
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 31 -
Page 36

Appendix D: Example applications
Factory Default
Factory default configuration supports traditional differential drive remote control robot
operation (Combat robots, for example). The default configuration enables channel
mixing so the LEFT input controls overall speed and the RIGHT input controls steering.
The configuration consol is not needed for operation but can be used to alter
parameters to suit the users needs (input dead band, control curve, mixing).
Use the following commands to return to the factory default configuration:
@0sQ1
See Factory Preset under Internal Register Descriptions, for complete details.
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 32 -
Page 37

Giant R/C Servo
By adding potentiometer feedback to motor output (typically a gearbox) the RS160D
can serve as a two channel servo controller.
Set Up & Tuning
Because of the power available in the RS160D, it is recommended one use quality
precision wire wound multi-turn potentiometers for the feedback mechanism. A typical
unit would be a 5 turn, 10k pot (Bourns 3590S-02-103).
The parameters listed, below are general values that need to be modified for each
particular situation. Read the section on servo tuning for more details. Certain values,
like the Back-EMF value cannot be experimentally determined with potentiometer
feedback, rather they need to be calculated. The same is true for reasonable velocity
limits.
1. Reset factory defaults with no mixing: @0sQ0
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 33 -
Page 38

2. Verify that forward stick movement causes an increase in analog feedback
voltage. I.e. that positive drive output matches positive feedback.
3. Set the operating mode to OFF: @0sm0
4. Select the analog feedback mechanism: @0sJ1
5. Set the Input Factor (F) to 32: @0sF32
6. Set the torque limit to 64 (1/4 power) @0sT64
7. Set the velocity limit to 40 (about 2 seconds travel): @0sV40
8. Set the velocity gain to 128 @0sD128
9. Set the position gain to 16 @0sP16
10. Save the settings: @0sw
Now the servo is set up in a fairly safe mode. Be ready to turn power off quickly in case
something isn’t set up properly.
11. Move servo output close to the center position (of the feedback pot)
12. Enable position servo mode: @0sm5
At this point the servo should move (or not) towards center stick position. Test it out by
moving the stick gently forward and back. The servo should track stick movement. If
the servo starts to move, accelerate and race off in one direction, quickly turn off power!
Either the motor or the feedback potentiometer is connected in reverse; fix this problem
and try again. Because the servo mode was not saved the RS160D will power up in a
safe mode allowing changes.
A complete description of parameters and tuning are beyond this users guide. Here are
a few notes on improvements that can be made to the parameters:
1. The torque limit was set to ¼ the maximum.
2. The velocity limit was set for roughly a 2 second time for the servo to traverse
from -100% to 100% position (+/- 2047 counts, 20 ms loop time, 2 seconds;
4094*2*.02 = 40)
3. The input factor was set so full stick travel (+/- 1000 counts) only requested +/1000 on the position, or about ½ the possible travel.
4. Back-EMF is roughly 8192/max velocity of the feedback signal. The velocity is
the number of encoder ticks/servo loop at maximum RPM. Knowing that the
feedback signal has a range of 4096 and the default loop rate is 20ms, use the
gear ratio to calculate the maximum velocity at maximum motor RPM and the
back-EMF factor.
5. Depending upon power of the motor, inertia of the control system, a 50 Hz loop
rate may be too slow. If the loop rate changes, then various parameters will
change proportionally.
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 34 -
Page 39

CNC (Stepper motor) servo
CNC
Controller
Follow Error
CNC
Controller
Direction
Step
Direction
Step
Left Motor
A
B
Encoder
RS160D
Right Motor
A
B
Encoder
4800-38.4k
`
baud
Configuration
and Control
CNC Step control advances the position set point +/- one count for each 0 to 5v step
input. 0v direction = reverse, 5v direction = forward. Three channels of CNC control
are available on the RS160D with the addition of a third OSMC motor driver board.
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 35 -
Page 40

Following error is a normally open CMOS output that is shorted to ground when the
difference between the feedback position and the position set point exceed a fixed
amount specified in the U register (unit amount, manual move). The following error
output is only enabled when CNC is selected as the input mode.
Robot-Solutions 2005 RS160D-Servo www.robot-solutions.com
Users Guide - 36 -
 Loading...
Loading...