

Manuale di Sicurezza e
Funzionamento
RL1000 & Docking Station
www.friendlyrobotics.com
DOC0078A
Dichiarazione di conformità EC
1. F. Robotics Acquisitions, con sede in Hatzabar St.,
macchinari descritti al punto 2 sono conformi alle direttive riportate ai punti 3 &
2. Prodotto: tosaerba robotizzato con alimentazione a batterie da
RL
850
e RL1000
Numero di serie: fare ri
3. Sottosposto a collaudi presso il British Standards Institute (Istituto per le norme britannico) per verificare
la conformità del macchinario ai Requisiti essenziali in mate
di macchinari (Sicurezza
Durante i collaudi, sono state prese in considerazione le seguenti norme europee
EN
292, Parti
EN
294: 1992, Sicurezza dei macchinari
entrino a contatto con gli arti superiori
EN
418: 1992, Sicurezza dei macchinari
per la progettazione
EN
60204: Parte 1:
generali
EN
In aggiunta, durante i collaudi dei macchinari si è tenuto conto delle seguenti norme e testi nazionali
BS
42
PrEN
previsti per i tosaerba elettrici alimentati a batteria a controllo pedonale
Le prove relative al livello di rumore sono state eseguite in conformità ai requisiti fissati in: 79/113/EEC e
88/181/EEC
I risultati sono stati pubblicati dal British Standards Institute nella relazione numero
luglio
Marylands Avenue, Hemel Hempstead HP
4. I macch
Direttiva
Frienmc_EN.141123, datata 21 giugno
Rakevet Industry Zone,
5. Livello di potenza acustica misurato
6. Livello di potenza acustica garantito: 90
7. Documentazione tecnica conservata da Mr. Dedy Gur, Direttore QA
Dichiaro che il prodotto di cui sopra è conforme ai requisit
.
60335: Parte 1:
3456: Parte 2:
Tosaerba
50338: 1999, Sicurezza degli apparecchi ele
2000
89/336/EEC. I risultati sono stati pubblicati dal Hermon Laboratories, relazione numero
.
ferimento alletichetta riportata
) del
1992,
relativi alla progettazione e costruzioni di macchinari
1 e 2:
1991, Si
.
1997, Sicurezza dei macchinari - Apparecchiatura elettrica dei macchinari Requisiti
1994, Sicurezza degli apparecchi elettric
Par. 2
alimentati a batterie
.
.
inari sono stati inoltre collaudati presso Hermon Laboratories per verificare la conformità alla
curezza dei macchinari
Distanze di sicurezza volte a impedire che le zone pericolose
.
Sist
ema di arresto di emergenza, aspetti funzionali
.42: 1997, Sicurezza degli apparecchi elettrici per uso domestico e simili
.
2 4SQ, UK.
2000
.
Binyamina, 305550, Israel
: 85 db
.
db
.
Industrial Zone, Pardesiya, Israel, dichiara che i
4.
24
Volt, modelli RL
sul macchinario
ria di salute e sicurezza riguardanti la fornitura
Principi generali per la progettazione
i per uso domestico e simili
ttri
ci per uso domestico e simili
.
i specifici in precedenza
.
.
.
500, RL
:
Requisiti particolari
282/4077203, datata 14
.
550, RL
.
.
.
800
Principi
:
Par. 2
.
*
Il modello RL
Robotics attualmente venduti sono stati collaudati da F. Robotics Aquisitions Ltd
Rilasciato a
Pardesiya, Israel
500
è stato collaudato dal British Standards Institute nel
Shai Abramson Senior VP R
2000. Tutti i modelli Friendly
2
.
&D
I prodotti sono stati fabbricati da F. Robotics Acquisitions (Friendly Robotics).
© Friendly Robotics, 2005-A.
fotocopiata, riprodotta o trasmessa in altre lingue senza la previa autorizzazione scritta di Friendly
Robotics.
Il prodotto , i dati tecnici del prodotto e questo documento sono suscettibili
Tutti gli altri marchi appartengono ai rispettivi proprietari.
Omologazione CE.
Benvenuti nel mondo dei macchinari domestici con il Robomow di Friendly Robotics!
Grazie di aver comprato il nostro prodotto. Siamo sicuri che godrete
userete Robomow per tagliare il prato. Quando è installato e usato correttamente, Robomow funzionerà in
modo sicuro sul vostro prato e vi procurerà una qualità di taglio ugualiata da poche falciatrici. Sarete
meravigliat
i dall'aspetto del vostro prato, Robomow l'ha fatto per voi.
Tutti i diritti
riservati. Nessuna parte del presente documento può essere
il tempo libero che avrete mentre
a ca
mbiamenti
senza avviso.
IMPORTANTE!
Le seguenti pagine contengono importanti istruzioni di sicurezza e di funzionamento.
Leggere con cura e seguire tutte le istruzioni, avvertenze e precauzioni di sicurezza
menzion
La mancata osservanza delle istruzioni sopra riportate può risultare causa di gravi ferite o
di morte di persone e animali domestici o di danni alla proprità personale.
ate nel manuale.
3
Indice
Precauzioni e avvertenze di sicurezza.................
Caratteristiche di sicurezza.............................................................................................8
Contenuto della confezione............................................
Capitolo 1
Capitolo 2
Capitolo 3
Capitolo 4
Capitolo 5
Capitolo 6 - Impostazioni e Caratteristiche avanzate.......................................................51
Capitolo 7
Docking Station e installazione del cavo perimetrale..
Impostazioni iniziali....................................................................
Funzionamento manuale e automatico.......................................................37
Impostare il programma settimanale...........................................................43
Ricari
Messaggi di testo e risoluzione dei problemi...............................................59
ca.....................................................................................................
...........................................................5
................................................
...............................12
.................29
10
...47
Capitolo 8
Capitolo 9
Capitolo 10
Specifiche tecniche......................................................................................69
Cura e manutenzione...................................................................................70
A
ccessori....................................................................................................74
4
Precauzioni e avvertenze di sicurezza
Istruzioni
1.
Leggere con cura il manuale prima di usare il Robomower. Acquistare f
imparare ad azionare correttamente il Robomower e seguire tutte le istruzioni e avvertenze di
sicurezza.
2.
Non usare il Robomower per uno scopo diverso per cui è stato progettato.
3.
Non consentire l'uso del Robomower a bambin
delle istruzioni uti
4.
Tenere
5.
L'utente è responsabile per gli incidenti o pericoli che potrebbero accadere ad altr
alle loro proprietà.
Preparazione
lizzino l'apparecchio.
l'area di funzionamento libera
i. Non lasciare mai che persone non a conoscenza
, senza bambini e animali domestici.
amiliarità con i controlli e
e persone o
6.
Accertarsi di impostare e di installare il cavo perimetrale secondo le istruzioni.
7.
Indossare indumenti idonei ed esclusivamente scarpe robuste.
8.
Controllare attentamente l'area da tosare e accertarsi
da giardino e altri corpi estranei. Tali oggetti potrebbero venir scagliati dalle lame e provocare
lesioni gravi.
9.
Prima di usare il Robomower, togliere sempre il gruppo batterie e controllare le lame. Sost
le lame consumate o guaste.
10
Utilizz
Funzionamento
11.
Azionare il Robomower solamente di giorno o con una buona luce artificiale.
12.
Quando si utilizza il dispositivo di controllo manuale non azionare il tos
si indossano sandali aperti. Indossare sempre scarpe robuste e pantaloni lunghi.
13.
Non tosare il prato se questo è bagnato o se piove.
14.
Quando si utilizza il dispositivo di controllo manuale accertarsi del proprio punto di app
nelle pendenze.
15.
Non azionare l'apparecchio su
nelle pendenze quando un equilibrio stabile non è possibile.
16. Tenere tutti i dispositivi
sostituire le part
parte è danneggi
17.
Non azionare il Robomower se qualsiasi caratterist
danneggiati o in
18.
Non tentare di mettere fuori servizio qualsiasi car
19.
Quando si utilizza il dispositivo di controllo manuale accendere il motore secondo le istruzioni
e non avvicinare i piedi dalle lame.
20.
Questa
allontanare persone
21.
Non permetter
22.
Non avvicinare le mani e
23.
Non sollevare e portare questa macchina mentre i motori funzionano.
24.
Non tentare di controllare o di aggiustare il tosaerba mentre questo è in movimento.
25.
Non sollevare il tosaerba o tent
26.
Togliere il gruppo batterie prima di sollevare il tosaerba o di
27. Non avviare
perime
are solamente accessori appropriati
dei terreni inclinati oltre 15 gradi o usare la modalità manuale
di sicurezza, protezioni, coperchi e sensor
i danneggiate, comprese le linguette.
trale.
ata o consumata.
operativi
macchi
e a nessuno di montare o di sedere
il Robomower in modo automatico fuori dall'appezzamento delimitato dal cavo
.
na possiede delle lame affilate
, bambini e animali domestici dal tosaerba in uso.
i piedi
dalle lame affilate
are di controllare le lame quando questo è in movimento.
.
a rotazione! Non lasciare il tosaerba incustodito;
che sia priva di sassi, ramoscelli, cavi, tubi
Non azionare il Robomowe
ica o dispositivi
atteristica o dis
sul Robomower.
e ad altre parti in movimento.
i a posto. Riparare o
di sicurezza sono
positivo di sicurezza.
tentare qualsiasi aggiustamento
ituire
aerba a piedi nudi o se
oggio
r se qualsiasi
.
5

Docking Station
28.
Quando si programma la partenza automatica, accertarsi che bambini, animali domestici o altre
persone non saranno presenti nel prato.
29.
Non usare l'alimentazione elettrica di Docking Station con una prolunga.
30.
Non mett
31.
Non mettere oggetti di metallo
32.
Dopo aver tolto il gruppo batterie del tosaerba regolare il giorno
può causare un'impostazione impropria del giorno e dell'ora e un'operazione
Robomower
33.
Non spruzzare acqua di
funzi
onamento
Cura e manutenzione
34.
Mantenere, controllare e curare il Robomower secondo le istruzioni (riferirsi al cap. 9)
35.
Tenere bulloni, chiavistelle, e viti
questo ap
36.
Sostituire parti consumate o danneggiate per sicurezza.
37.
Per maneggiare le lame, utilizzare guanti da lavoro robusti.
38.
Usare solamente l'apparecchiatura, il gruppo batterie e l'alimentazione elettrica/di carica di
origine con questo to
surriscaldamento o una perdità di liquidi corrosivi dalla batteria.
39.
Il caricabatteria (alimentazione elettrica) è destinato al solo uso
dove l'umidità o l'acqua
asciutto,
40.
Non mettere il gruppo batterie nel fuoco e non mettere le batterie usate nei rifiuti domestici. La
batteria
41.
Non aprire o mutilare il gruppo batterie. L'elettrolita rilasciata è corrosiva e può causare danni
agli occhi e alla pelle.
42.
Indossare una protezione per gli occhi e us
portare i picchetti/pioli del cavo.
elettrica.
43.
Non usare l'alimentazio
44.
Trasporto - per muoversi con sicurezza verso o all'interno dell'area di taglio:
2.4).
trasportare il tosaerba a mano (vedere Figura n. 2.1).
ere oggetti di metalli sull'area dei contatti di carica sul Docking Station.
attraverso le spine di carica del Robomower.
, che potrebbe causare gravi lesioni corporee.
rettamente nell'area di dock del Docking
del Docking Station.
parecchio.
ben
ventilato e non esposto direttamente al sole.
deve essere
1.
Usare il dispositivo di controllo manuale per portare
2. Nel caso di
saerba. Un uso sco
possono essere presenti. E' necessario collocarlo in un posto riparato,
raccolta, riciclata
Fissare
ne elettrica e il ricaribatteria
livelli
diversi
e l'ora.
Station o sul pannello di
bene avvitati
rretto può causare una scossa e
, o e
liminata in modo conforme e nel
in modo sicuro tutti i picchetti al fine di evitare una scossa
di altezza o di scale, toglier
al fine di assicurare una condizione sicura di
in interni
are dei guanti per installare il cavo perimetrale e
se il filo della spina è d
da un posto all'altro (Vedere parte
e il gruppo batterie dal tosaerba e
La mancat
non intenzionale del
lettrica, un
. Non usare in aree
rispetto dell'ambiente.
anneggiato.
a osservanza
6
12345
6
motivo.
Precauzioni e avvertenze di sicurezza
Spiegazioni delle etichette di avvertenza
1.
Avv
ertenza
funziona e seguire tutte le istruzioni e le avvertenze.
2. Leggere attentamente il manuale d'uso e seguire tutte le istruzioni di sicurezza.
3. Prestare attenzione al lancio di oggetti.
4. Tenere i bambini, gli animali domestici e le altre persone a distanza di sicurezza.
5. Lame affilate
6. Lame affilate
questo è un
in rotazione. Non avvicinare le mani e non sollevare il Robomower da questa area.
in rotazione. Non avvicinare i piedi.
app
arecchio elettrico
pericoloso
. Maneggiare con cautela quando
.
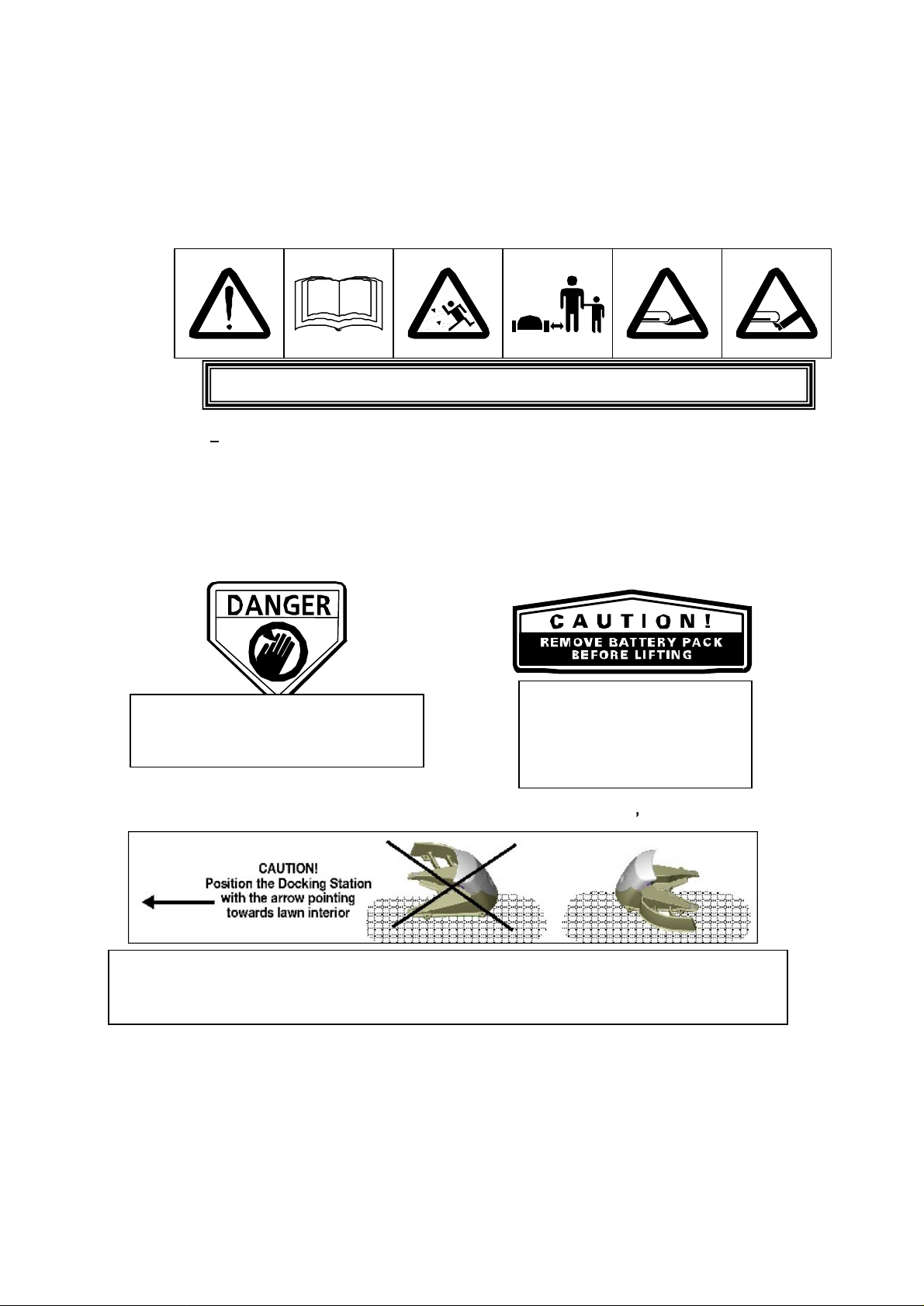
PERICOLO! Lame affilate in
rotazione. Non avvicinare le mani
e i piedi. Rischio di gravi lesioni.
AVVERTENZA! Posizionare il Docking Station con la freccia rivolta verso l interno del prato.
Il coperchio del Docking Station deve fronteggiare la parte interna del pr
quando è installato. La mancanta osservanza può causare danni alla proprietà o
alle persone.
AVVERTENZA! Togliere il
gruppo batterie prima di
tentare di sollevare il
Robomower per qualsiasi
ato
7
Robomow® - Caratteristiche di sicurezza
1. Protezione antibambino / guardia di sicurezza
Questa opzione di menù mette a disposizione una funzione di sicurezza che impedisce ai
bambini e ad altre persone non a conoscenza del funzionamento del tosaerba di azionarlo.
2. Sensore sollevamento
Un sensore è posto davanti sulla parte anteriore della ruota del tosaerba. Nel caso in cui
l'es
tremità del tosaerba venga sollevata di circa 2,50 cm dalla sua posizione iniziale durante il
funzionamento, le lame smetteranno immediatamente di funzionare ( 1 secondo).
3. Sensore attrezzato con paraurti
La parte anteriore e posteriore dei pa
azione quando il tosaerba incontra un ostacolo rigido o solido di altezza superiore ai 15 cm.
Quando il paraurti entra in azione, il tosaerba cambia direzione. Con la modalità manuale,
l'azione del paraurti smetterà
4. Arresto di emergenza
Situato sulla parte superiore esterna, di colore rosso. Premere il pulsante a qualsiasi momento
della funzione arresterà ogni movimento
delle lame ( 1
5. Riconoscimento del modo automatico
Il Robomower è progettato in modo tale che non possa entrare in modalità manuale mentre il
Dispositivo di Controllo Manuale
automatico mentre il dispositivo di Controllo Manuale è tolto.
6. Presenza e Controllo dell'Operatore in due digitazioni
Mentre è attivo la modalità manuale, è necessario due digitazioni independe
lame del tosaerba. Il pulsante delle lame del tosaerba deve rimanere premuto per continuare il
funzionamento delle lame. Una volta rilasciato, il processo di innesto in due digitazioni deve
essere ripetuto.
secondo).
raurti sono attrezzati con dei contatti che entreranno in
immediatamente la rotazione delle lame ( 1 secondo).
del tosaerba e arresterà immediatamente la rotazione
è nel suo supporto e che non possa entrare in modo
nti per innestare le
7. Sistema di
Il Robomower è attrezzato con un sistema di controllo di ricarica. Esso permetto di tenere
sempre collegato il caricabatteria, anche quando la batteria è carica. Il sistema di controllo
impedirà una sov
8. Gruppo batterie sigillato
Il gruppo batterie che aziona il Robomower è completamente sigillato e non perderà nessun tipo
di fluidi, nonostante la posizione. In più, il gruppo batte
caso di corto circuito o di una disfunzione dell'alimentazione elettrica.
9. Interruttore perimetrale e Cavo Perimetrale
l Robomower non può funzionare senza un cavo perimetrale installato e attivato dall'
perimetrale. Nel caso in cui l'interruttore perimetrale sia spento o non funzioni, il Robomower si
arresterà. Allo stesso modo, se si verifica un taglio nel cavo perimetrale il Robomower si
arresterà di nuovo. Un taglio nel cavo p
di funzionare. Il Robomower può solamente funzionare all'interno dei limiti del cavo perimetrale.
10. Assenza di corrente dell'interruttore perimetrale
La caratteristica dello spegnimento au
dell'interruttore perimetrale dopo circa 5 ore di funzionamento continuo. Questo accadde
praticamente 1 a 2 ore dopo che un gruppo batterie pienamente carico debba essere ricaricato.
Questo contribuisce a impedire che delle persone non autorizzate possano tentare di riavviare
il Robomower dopo un'operazione completata.
ricarica controllato elettronicamente
raccarica e la manterrà pienamente carica per l'uso successivo.
erimetrale precedente all'azione impedirà il Robomower
tomatico dell'interrutore perimetrale chiuderà l'azione
rie contiene un fusibile ad uso unico nel
interruttore
8

11
. Protezione di controllo della sovratensione
Ognuno dei motori delle tre lame e ognuno dei moto
controllati durante il funzionamento per qualsiasi situazione, che può causare un surriscaldamento dei
motori. In tal caso, il Robomower smetterà l'azione di almeno un motore e forse dello stesso t
e indicherà che il motore si raffredda. Sebbene fosse eccezionale, questo può accaddere quando il
tosaerba è installato su un'erba molto alta; la parte inferiore del tosaerba è ostruita a causa di una
scarsa cura di pulizia; il Robomower ha incontrato un ostacolo che non è in grado di azionare il
sensore del paraurti impedendolo di muoversi; o un problema del paesaggio dell'area ha bloccato il
tosaerba e l'impedisce di muoversi.
12.
Segnale d'allarme di avvertenza del
Quando il tosaerba è programmato per partie dal Docking Station in modo automatico a una ora
prevista, un segnale acustico e la lampadina di funzionamento vengono attivate 5 minuti prima della
partenza. Questo è una
notifica di avvertenza per liberare e controllare l'area.
la partenza automatica
ri delle due ruote motrici sono continuamente
osaerba
AVVERTENZA
Troverete questo simbolo di avvertenza in diversi
punti del manuale. E' destinato a mettere in risalto
un importante messaggio di precauzione
e di avvertenza di sicurezza.
Stiate
particolarmente attenti e accertatevi di capire
pienamente il messaggio prima di procedere.
!
9

2
4
891110 6
Contenuto della confezione
(Robomow®)
1. Robomow
2. Batterie
3. Manuale di Sicurezza e
Funzionamento.
4. Caricabatteria standard
Serve per ricaricare il gruppo batterie del Robomower.
Uso in interni solamente.
5. Righello RoboRuler
Serve per determinare la distanza del cavo perimetrale
dal bordo del prato.
6.
Servono per fissare il cavo perimetrale
Picchetti
ai bordi del prato e intorno agli ostacoli.
7.
Cavo
Serve per creare un muro virtuale per il Robomower
®
5
7
8. Interruttore perimetrale (& batterie "C" comprese)
Serve per
nei vari appezzamenti di terreno.
Servono per giuntare i cavi (secondo necessità)
11.
negli appezzamenti separati.
Attiva il cavo perimetrale che definisce l'area
riservata al funzionamento del Robomower
9
. Picchetto di montaggio per l'interruttore perimetrale
sostenere l'interruttore perimetrale
10.
Connettori serracavi
Connettori appezzamenti
Servono
per l'installazione
.
.
10

13
Contenuto della confezione
(Docking Station)
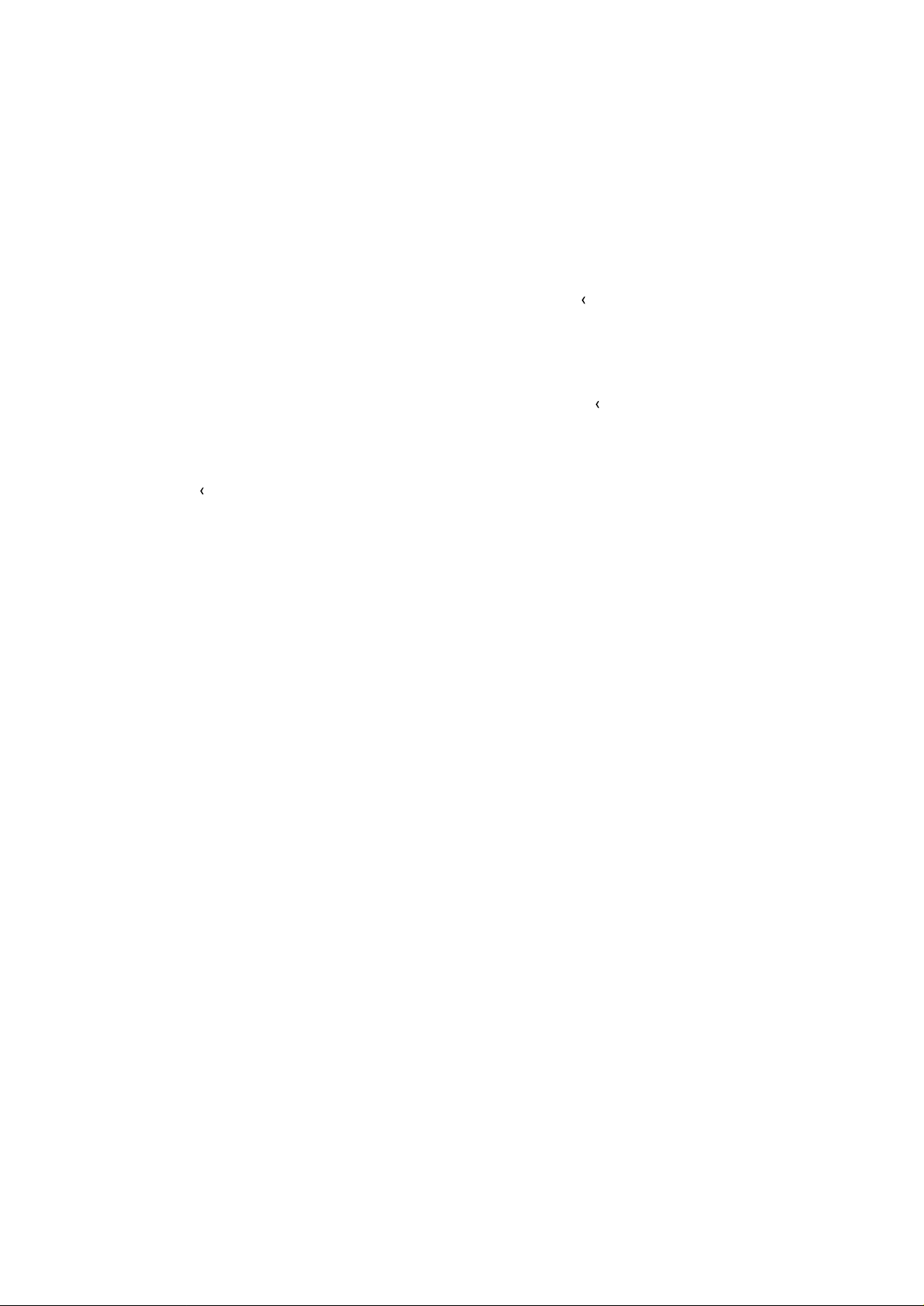
12. Base
13. Fodera
& alimentazion
Serve per ricaricare il gruppo batterie del Robomower e
quale opera il Robomower.
14. Copertura laterale del Docking
Ser
di salire sul Docking Station durante
Serve per inviare il Robomower ai
contatti di carica.
con l interruttore perimetrale
attivare il cavo perimetrale, che delimita larea nella
ve per impedire al Robomower
il funzionamento
e elettrica
12
14
15. Picchetti del
Servono per fissare il Docking Station
al terreno.
16.
Servono per assemblare il coperchio
del Docking Station alla base
17. Connettore
Serve per giuntare il cavo (se necessario).
Viti x2
Docking (
serracavi
x5)
16
11
Capitolo 1
Docking Station & Installazione del cavo
perimetrale
Cover
Cover
2
Screw (x2)
Screw (x2)
5
55
22
Base
Base
1
11
Stake (x5)
Stake (x5)
4
44
1. Base
2. Coperchio
3. Copertura laterale
4. Picchetti (x5)
5. Viti (x2)
Fence
Fence
3
33
Figura 1.1. Montaggio del Docking Station
AVVERTENZA
Robomower con un Docking Station, come specificato nel capitolo di Sicurezza.
1.1
Zona del Docking Station
Prima di installare il cavo perimetrale e il Docking Station, è preferibile esa
posizione migliore per il Docking Station. Il Docking Statio è una soluzione completamente automatica
adatta per unarea, perciò è raccomandato installarlo in unarea pià larga possibile. Per tosare altre aree,
guidare sempli
come spiegato in questo manuale. Quando questa area è completata, riportare il taglierba alla station per
ricaricarlo.
cemente il Robomower verso unarea che volete tagliare e azionarlo in modalità automatica
! Fare ricorso alle istruzioni di sicurezza collegata al funzionamento del
minare il prato e scegliere la
INSTALLAZIONE NELLA ZONA DI DOCK
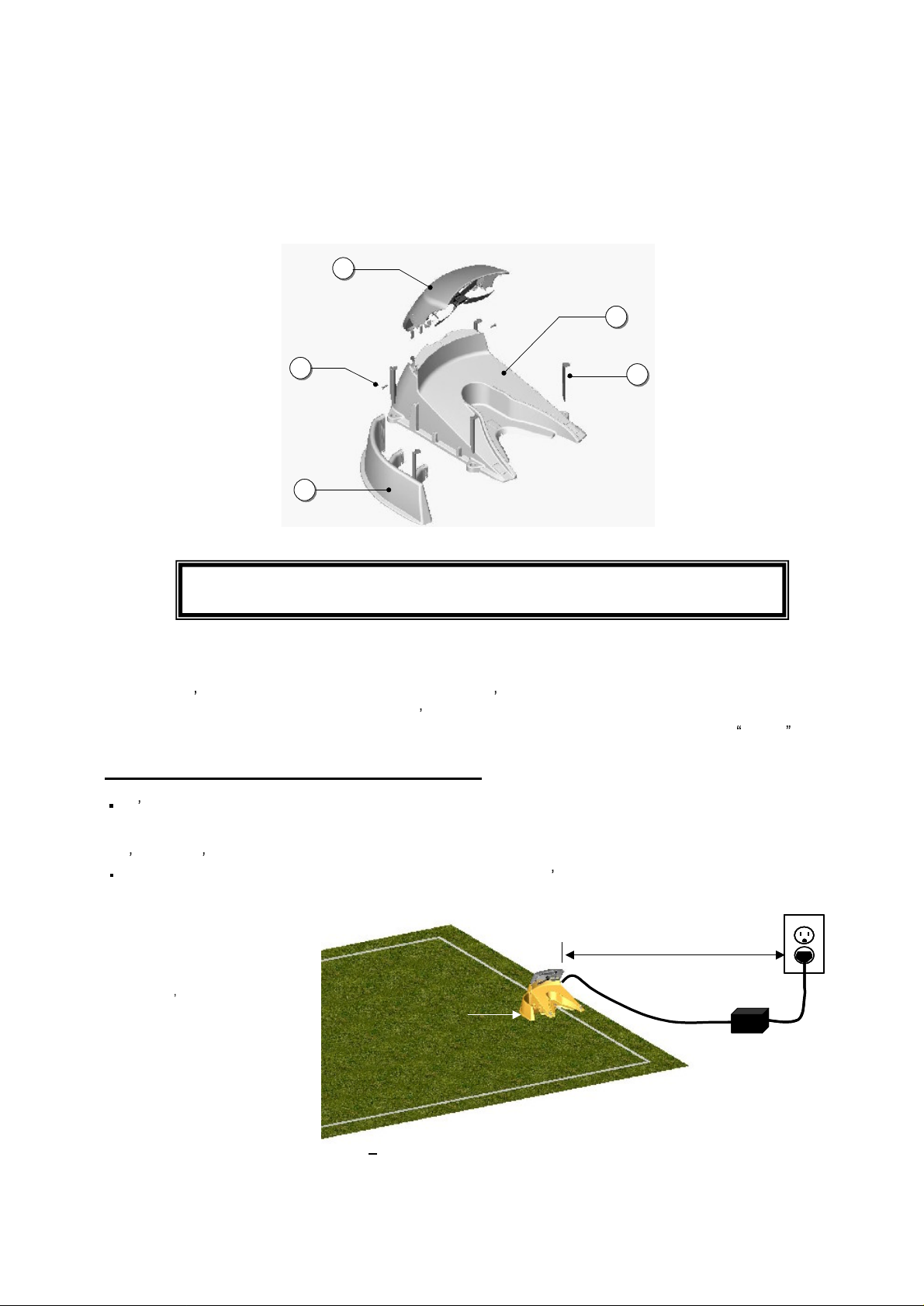
1.2 Collocaz
C è una distanza massimale di 15 metri dal ricettacolo al Docking Station, vedere figura 1.2. Non
usare una prolunga per aumentare la distanza. Se una distanza superiore a 15 metri è
richiesta, ricorrere a un te
l energia all interna della distanza specificata.
Collocare il Docking Station con la copertura laterale di fronte allinterno del prato. Vedere figura 1.2.
ione del Docking Station
cnico elettricista per installare una fonte di energia al fine di collocare
Receptacle
Receptacle
*
Massimo
*
Ricettacolo 120 V 230V
*
40 Volts Alimentazione elettrica
*
La copertura laterale deve essere
15 metri
di fronte all interno del prato.
12
Figura 1.2
Maximum 50 ft (15m)
Maximum 50 ft (15m)
The Fence
The Fence
should be
should be
inside lawn
inside lawn
Distanza dal Ricettacolo di energia
120 V
120 V
230 V
40 Volts
40 Volts
Power Supply
Power Supply
230 V
Distanza superiore
Note:
L energia elettrica è adatta per solo uso esterno, p
asciutto, ventilato e protetto dai raggi del sole. E raccomandato collocare il Docking Station più vicino
possibile al ricettacolo, arrotolare il cavo supplementare e depositarlo vicino allalimentazione
Vedere paragrafo 1.15 per maggiori informazioni sul cavo.
AVVERTENZA! Rischio di lesioni gravi. Quando collocate il filo
della spina al Docking Station assicuratevi
sicurezza al terreno e ch
Non attraversare le superficie come marci
sulle quale
non può essere fissato con sicurezza.
erciò è richiesto collocarla in un posto riparato,
elettrica.
che sia fissato con
e non ci sia rischio di scossa elettrica
apiedi o viali di accesso
.
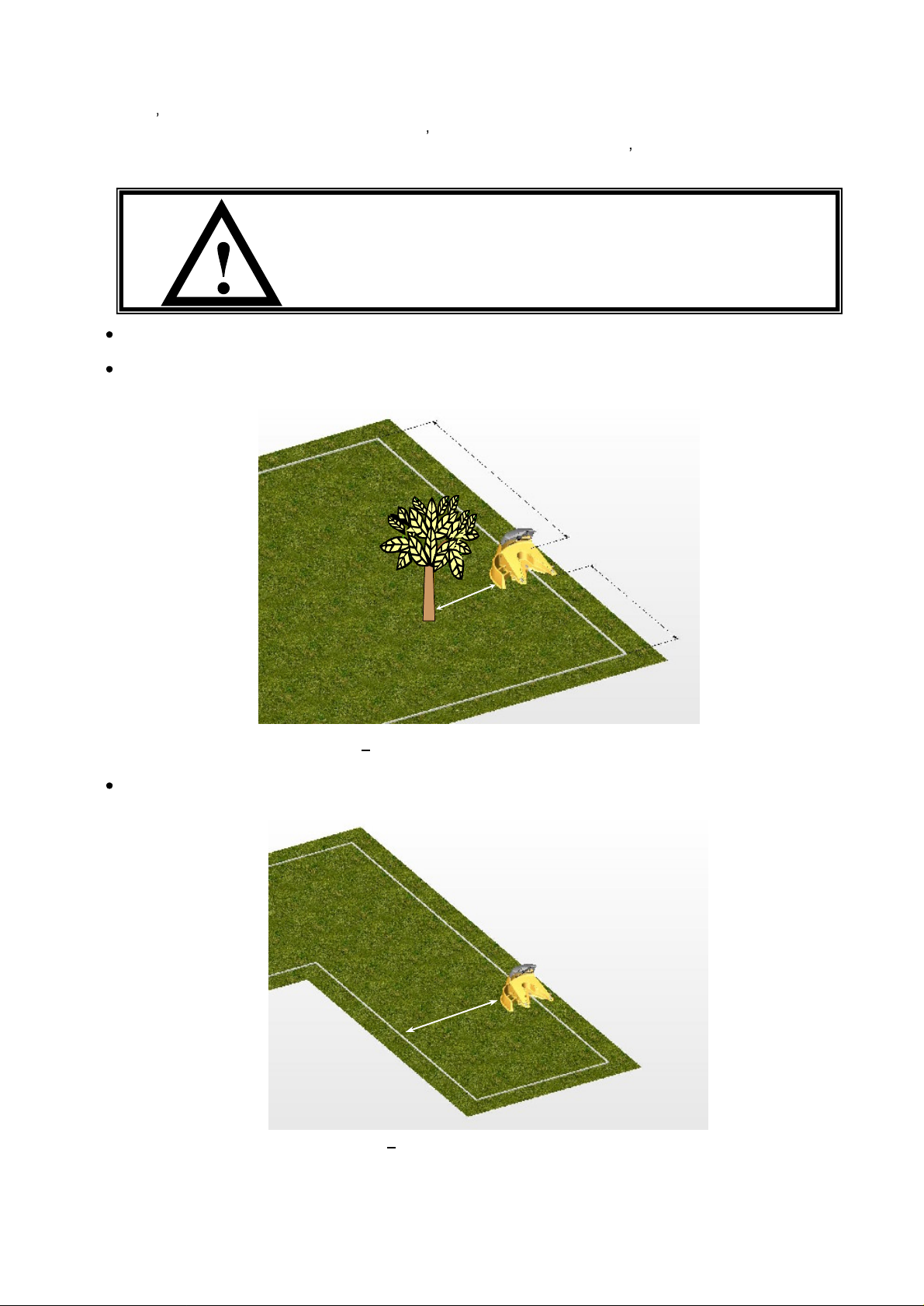
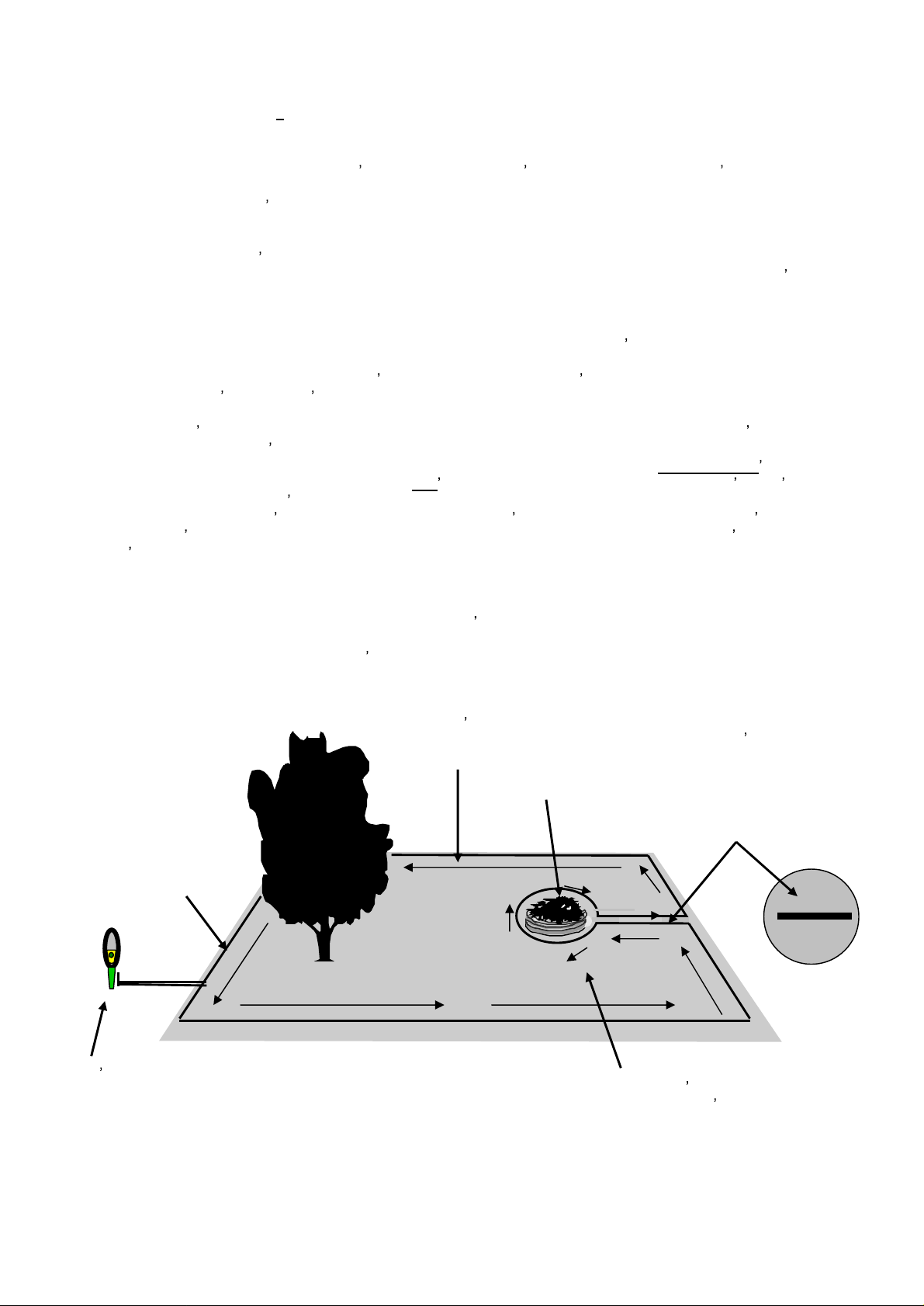
Collocare il Docking Station a una distanza minima dagli angoli del perimetro come illustrato
nella figura 1.3.
Una distanza minima di 2 metri è richiesta tra la c
qualunque ostacolo non escluso dal cavo perimetrale. Vedere figura 1.3.
opertura laterale del Docking Station e
Distanza superiore
a 1.2
m
Distanza
Figura 1.3
Distanza
superiore a 2m
Distanza dagli angoli e dagli ostacoli
superiore
a 2.5m
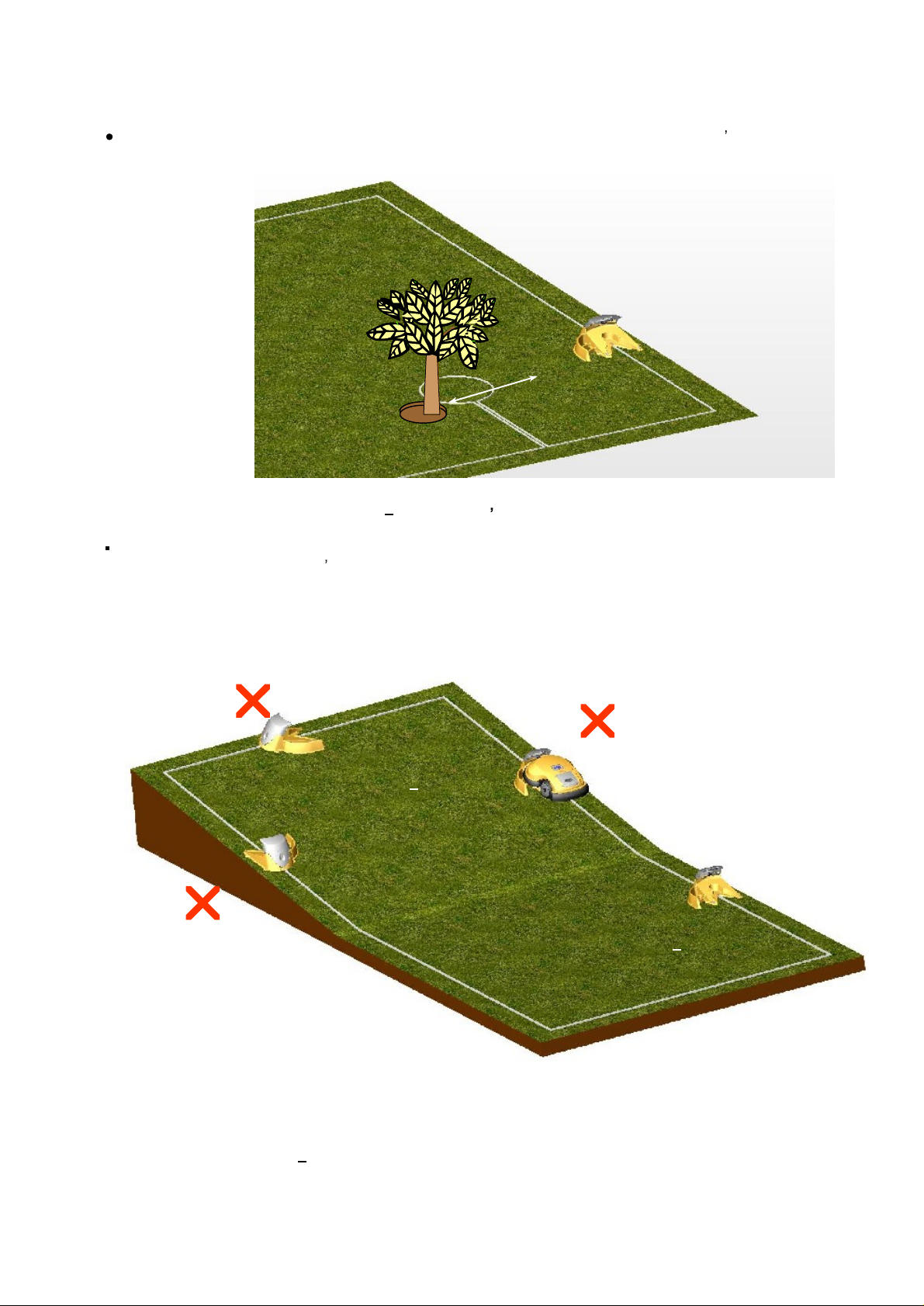
Una distanza minima di 2.5 metri è richiesta tra la co
perimetrale. Vedere figura 1.4.
a 2.5m
Figura 1.4 Distanza dal cavo perimetrale
pertura laterale del Docking Station e il cavo
13
OK
superiore a 2.5m
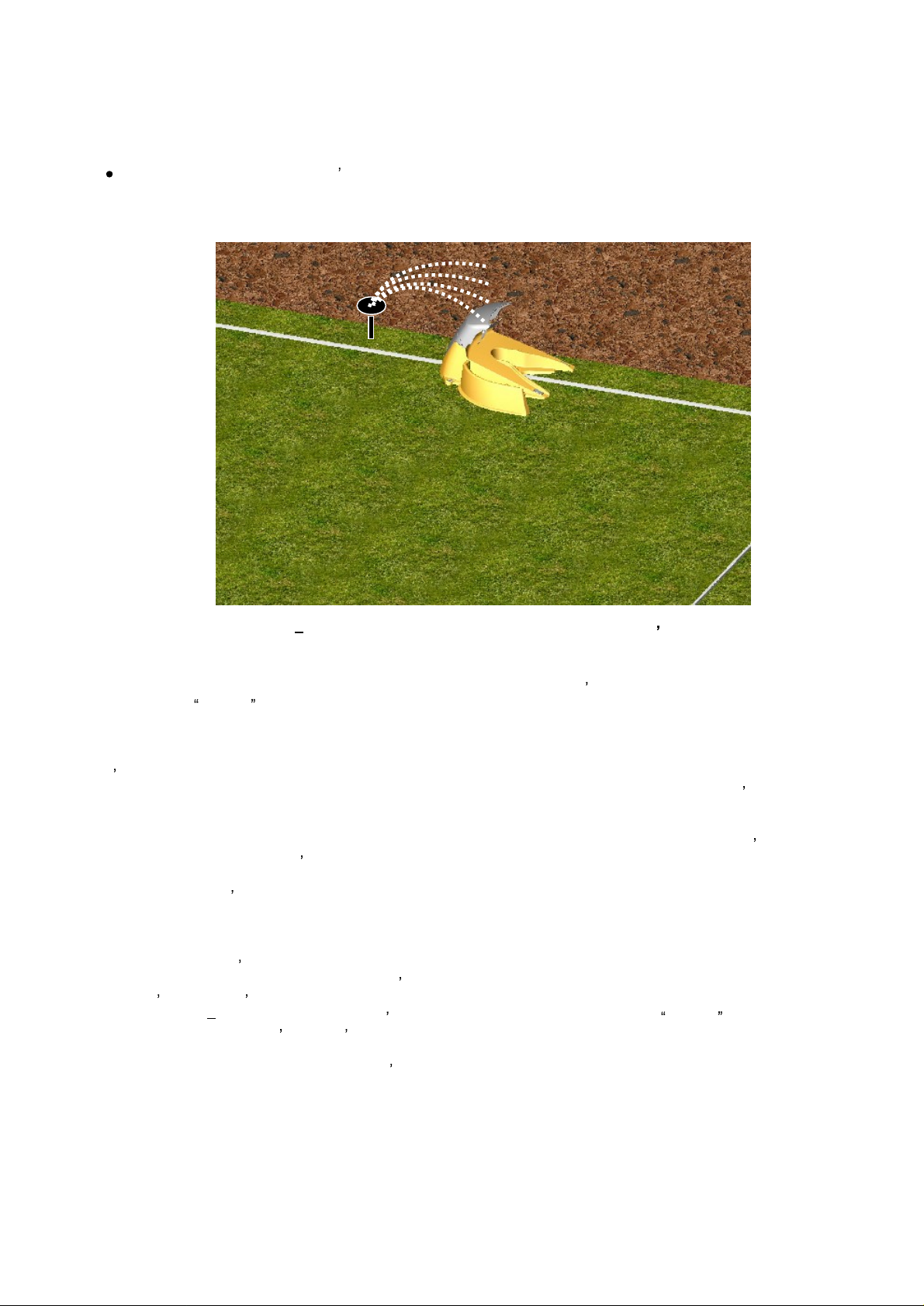
Una distanza minima di 2.5 metri è richiesta tra la copertura laterale del Docking Station e l isola
perimetrale. Vedere figura 1.5.
Distanza
Figura 1.5
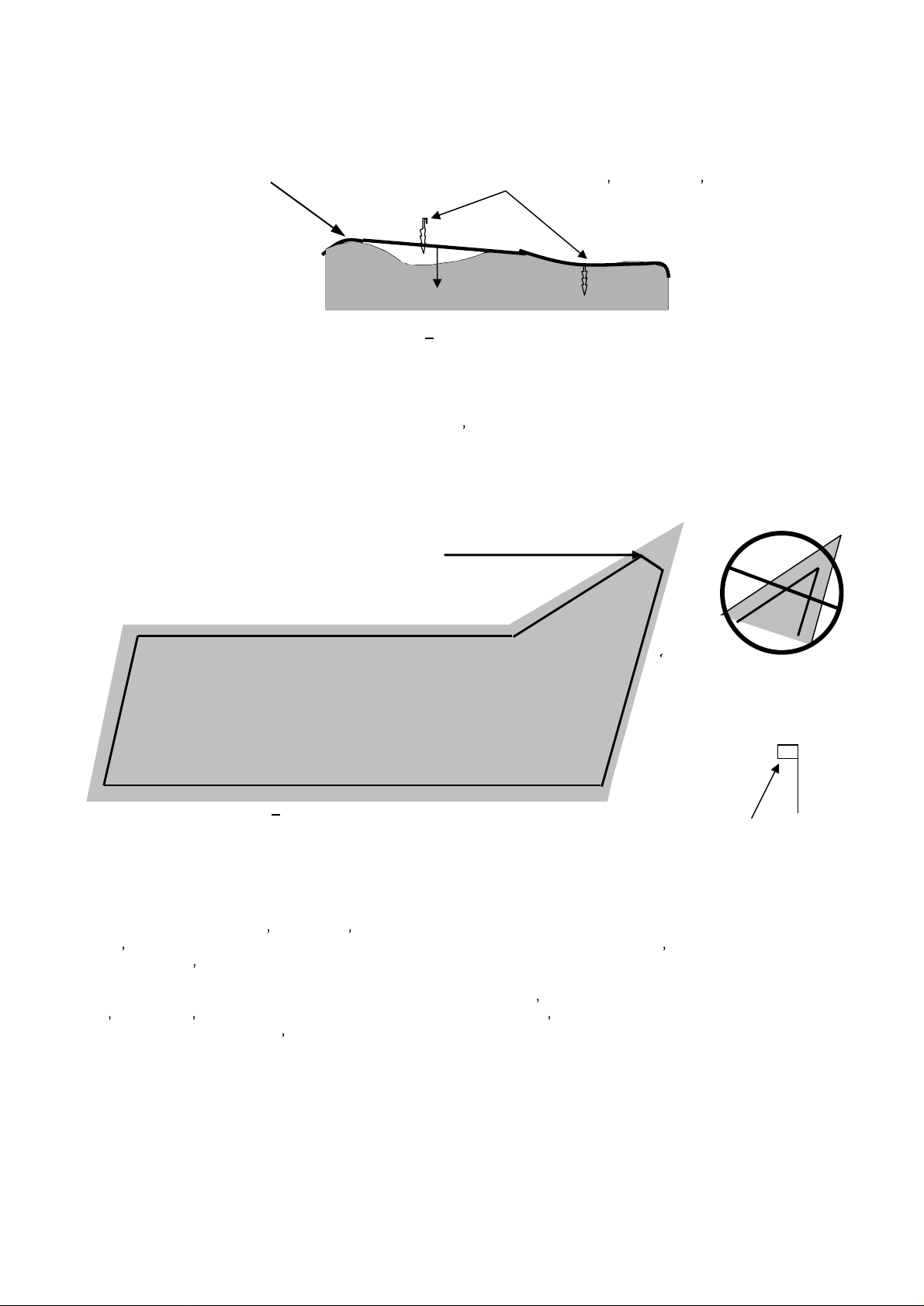
Collocare il Docking Station al livello del terreno. Non collocare il Docking Station su un terreno in
pendenza. Vedere figura 1.6. Larea sotto e int
un aggancio adatto del taglierba nel Docking Station.
livellate con la base del Docking Station.
Pendenza
Distanza dall isola perimetrale
orno al Docking Station deve essere piatta per assicurare
Assicurarsi che le due ruote motrici siano
impropria
Livello relativo
OK
14
Figura 1.6 Collocamento del Docking Station al livello del terreno
Il Robomower è impermeabile all acqua e alla pioggia, tuttavia è raccomandato collocare il
Docking Station lontano dalle teste degli innaffiatoi per una massima protezione.
Vedere figura 1.7.
Figura 1.7 Evitare il collocam
Adesso, individuato la posizione del Docking Station, potete iniziare l installazione del cavo perimetrale
nella zona di docking .
1.3 Installazione del cavo
L installazione del cavo perimetrale in una zona di dock e di non -dock è identica in termini di posizione e
di fissaggio. In una zona di non-dock, le estremità del cavo perimetrale saranno collegate allinterruttore
perimetrale, dove nella zona di d
Staccare il pezzo centrale perforato presente sulla scatola del cavo perimetrale e individuare lestremità
del cavo, quindi tirarla verso lesterno. Srotolare il filo. Non rimuovere la bobina dalla scatola.
IMPORTANTE:
perimetrale) prima di iniziare la disposizione del cavo perimetrale, al fine di essere attenti a tutte le
istruzioni e regole.
Dalla posizione dell interruttore perimetrale o dal Docking Station, iniziare a srotolare il cavo perimetrale
fuori dalla bobina mentre camminate lungo l area del prato che installate. Accertarsi di lasciare abbastanza
cavo all inizio, dove linterruttore perimetrale o il Docking Station saranno posizionati. Nel Docking Station
lasciare 20cm
meno di 1.5 cm di cavo allinizio dellinstallazione.
Dopo aver srotolato abbanstanza cavo all interno di una zona, usare il RoboRuler (vedere parte 1.4) per
individuare la posizione corretta del cavo. Dapprima posizionare un numero minimo di picchetti da fissare.
Esaminerete la posizione adeguata del cavo per il processo di tosatura del bordo e troverete delle
dove avrete bisogno di muovere il cavo senza difficoltà. Vedere parte
prova. Potete leggermente inserire a mano i picchetti nel terreno per tenere temporaneamente a posto il
cavo prima di interrare i picchetti al li
E necessario leggere questo capitolo (Docking Station & Installazione del cavo
vedere figura 1.8. Per l interruttore perimetrale (niente-zona di docking ) lasciare non
perimetrale per la zona di dock
ock sono collegate al quadro del docking station.
vello del terreno mediante un martello.
ento vicino agli innaffiatoi dell acqua
e per la zona di non -dock
2.8
per maggiori informazioni sulla
aree
15
Distanza breve
Distanza lunga
AVVERTENZA
Rischio di danni agli occhi. Utilizzare
indumenti protettivi idonei per occhi e mani.
Un t
erreno duro o secco può causare la
rottura dei picchetti durante il fissaggio. In
casi estremi, annaffiare il prato dove i
picchetti saranno fissati può essere
necessario.
Figura 1.8
1.4. Uso del RoboRuler
Il Robomower contiene un righello di misura chimato un RoboRuler destinato ad aiutare il posizionamento
del cavo perimetrale lungo i muri, le barriere, i marciapiedi, i viali di accesso, alle aiuole di fiori e ad altre
aree. Il RoboRuler presenta due serie di misure. La distanza più breve va utilizzata in presenza, in una
distanza di 30 cm, di bordi del prato senza ostacoli o dislivelli. La distanza più lunga va utilizzata in
presenza di ostacoli o dislivelli. Vedere figura 1.9.
Note: Usate la distanza breve del RoboRuler per installare il cavo perimetrale intorno allostacolo per
creare un isola perimetrale (Vedere parte 1.8).
Inizio del cavo perimetrale in una zona di
Docking Station
!
Area
Area esterna al cavo perimetrale
stesso livello e assenza di ostacoli.
Posizionamento
del cavo
perimetrale
1.5 Fissaggio del c
Non è necessario interrare il cavo perimetrale, sebbene potete farlo se desiderate, oltre 7.5 cm. Piccoli
picchetti o pioli sono forniti con il Robomow e servono a fissare e reggere il cavo perimetrale nel terreno,
sotto il livello dell er
nel terreno, il cavo e i picchetti spariranno in poco tempo sotto la ricrescità dellerba. I picchetti reggono
semplicemente il cavo a posto al livello del terreno al
pichetti dovranno essere distanziati luno dall altro, il ché manterrà il cavo sotto il livello dell erba e impedirà
un'eventuale scossa elettrica mentre verrà ricoperto per via della ricrescita dell erba. Vedere Figura 1.10.
Ricordare che dovete provare l installazione del cavo per la tosatura del bordo prima di occuparvi dei
picchetti aggiuntivi. Vedere parti
.
Figu
avo nel terreno
ba. Essi assomigliano a dei piccoli pioli di tenda. Quando saranno fissati correttament e
2.8 e 2.9
per maggiori informazioni sulla prova.
Posizionamento
del cavo
perimetrale.
ra 1.9
Uso del RoboRuler
fine di permettere all erba di crescere sopra di esso. I
esterna al cavo perimetrale
presenza di un muro come ostacolo.
16
Cavo perimetrale
Aggiugere dei picchetti per srotolare il
cavo perimetrale sulla superficie del
terreno, sotto l
estremità dell
erba.
Figure 1.10
1.6 A
ngoli e curve a gomito
Evitare di creare angoli acuti (meno di 90°) durante l
superiore a 90 gradi, il Robomower perderà la traccia del cavo perimetrale. Quando un angolo richiede un
posizionamento del cavo con un angolo inferiore a 90 °, il posizionamento può essere aggiustato creando
diversi angoli. Vedere Figura 1.11.
Installazione di un angolo
angoli al fine di evitare un
angolo inferiore a 90 gradi.
corretta, usando diversi
Area del prato
Fissaggio dei picchetti del cavo perimetrale
installazione del cavo perimetrale. In caso di angolo
Installazione di un
angolo scorretta.
Figura 1.11
1.7 Aree strette e passaggi stretti
Esiste
una limitazione d
un
altra più ampia, ma collegata alla prima. Un passaggio stretto è definito come un
sostanza dall
fo
rma di clessidra. La distanza minimale per un passaggio stretto effettivo è di 1.7 cm tra i cavi perimetrali.
Più il passaggio sarà largo, più sarà agevole per il Robomower l
l
efficacia e l
provvede un accesso a un
1.7 m. Figura 1.14.
ampiez
efficienza del tosaerba. Vedere Figura 1.7. Per un
Installazione corretta in angoli acuti
ampiezza d
za iniziale e nel quale il Robomower deve passare per accedere e tosare altre zone,
altra parte della stessa area, esiste una distanza minima di lavoro equivalente a
area che il Robomower può effettivamente percorrere per passare in
accesso tra le aree. Questo incrementerà
area che va stringendosi, ma che non
90
gradi
area che si restringe in
a
17
Aiuole
1.8 Definire gli Ostacoli
Numerosi
La regola semplice di misura è che l ostacolo deve avere un altezza minima di 15 cm e l ostacolo deve
essere relativamente rigido. Buoni esempi di questo tipo di ostacoli sono la maggioranza degli alberi, i pali
del telefono e i pali dell elettricità. Quando tali ostacoli sono presenti nel prato, è più facile permettere al
Robomower di urtarli, attivando i sensori del paraurti che l'aiutano nel percorso intorno
giovani e indeboliti non sono buoni esempi, perché non sono molto rigidi. Altri ostacoli che non sono rigidi
e che raggiungono unaltezza minima di 15 cm devono essere protetti dal Robomower usando il cavo
perimetrale. Questo fa parte del processo di installazione ed è comunemente riferita come un isola
perimetrale. Buoni esempi di questi tipi di ostacoli sono le aiuole, i laghetti, gli alberelli.
Il Robomower è progettato per operare agevolmente in un prato con i due tipi di ostacoli, tuttavia, per una
operazione delicata e silenziosa, è preferibile delimitare tutti gli oggetti fissi all interno e intorno alla zona di
lavoro. Se non siete sicuri di un ostacolo particolare, è opportuno escluderlo con il cavo perimetrale.
Questo non avrà nessun effetto sullefficienza del tosaerba e lostacolo potrà essere compreso
ulteriormente se loperazione d esclusione si rivela non necessaria.
Per creare un isola perimetrale, prendere il cavo dalla sezione del cavo perimetrale più vicina all ost
fissare il cavo intorno allostacolo, tornando allo stesso posto del cavo perimetrale. Esistono due modi per
installare il cavo perimetrale per escludere un ostacolo; 1. Porre il cavo
partendo dal cavo perimetrale e il ca
Questa area è situata tra lostacolo e il bordo normale del prato dove è installato il cavo perimetrale; 2.
Seguire la direzione dell installazione quando si va verso l interno del prato per escludere un ostacolo.
Mentre nell illustrazione della figura 1.5 può sembrare che i cavi vanno e partono dall installazione
dell isola come se fossero distanziati fra loro, in realtà è solo a scopo illustrativo. Un posizionamento
corretto di questi due cavi richiede che siano paralleli e a contatto fra loro, in nessun caso devono essere
distanziati fra loro oltre 3mm. Per risultati migliori, porre i due cavi sotto lo stesso picchetto quando li
posizionate nel prato intorno agli ostacoli. Il posizionamento dei cavi come viene descritto permette al
segnale nei due cavi di cancellarsi, ma solamente nellarea dovo sono installi paralleli e contatto fra loro.
Cancellando il segnale in questa sezione, il Robomower è libero di attraversare questa area ma esso
continuerà a riconoscere il segnale dellisola perimetrale. Vedere figura 1.30.
ostacoli nel prato possono essere non considerati nell'esclusione mediante il cavo perimetrale.
le Isole perimetrali
vo arriva
agli ostacoli . Alberi
in
direzione dell ostacolo
dall
ostacolo verso il cavo perimetrale, paralleli l uno all altro.
acolo e
Cavo
perimetrale
L interruttore è situato a meno di 0.9 m
dal cavo perimetrale. Cavi e interruttore
perimetrale devono ess
come i cavi delimitando un ostacolo.
ere paralleli,
Direzione
dell installazione
Mentre l illustrazione
rappresenta due cavi separati,
in realtà sono paralleli e
distanziati fra loro da meno di 3
mm.
Direzione dellinstallazione
adottata intorno all ostacolo.
18
Figura 1.12 Esclusione degli ostacoli con il cavo perimetrale
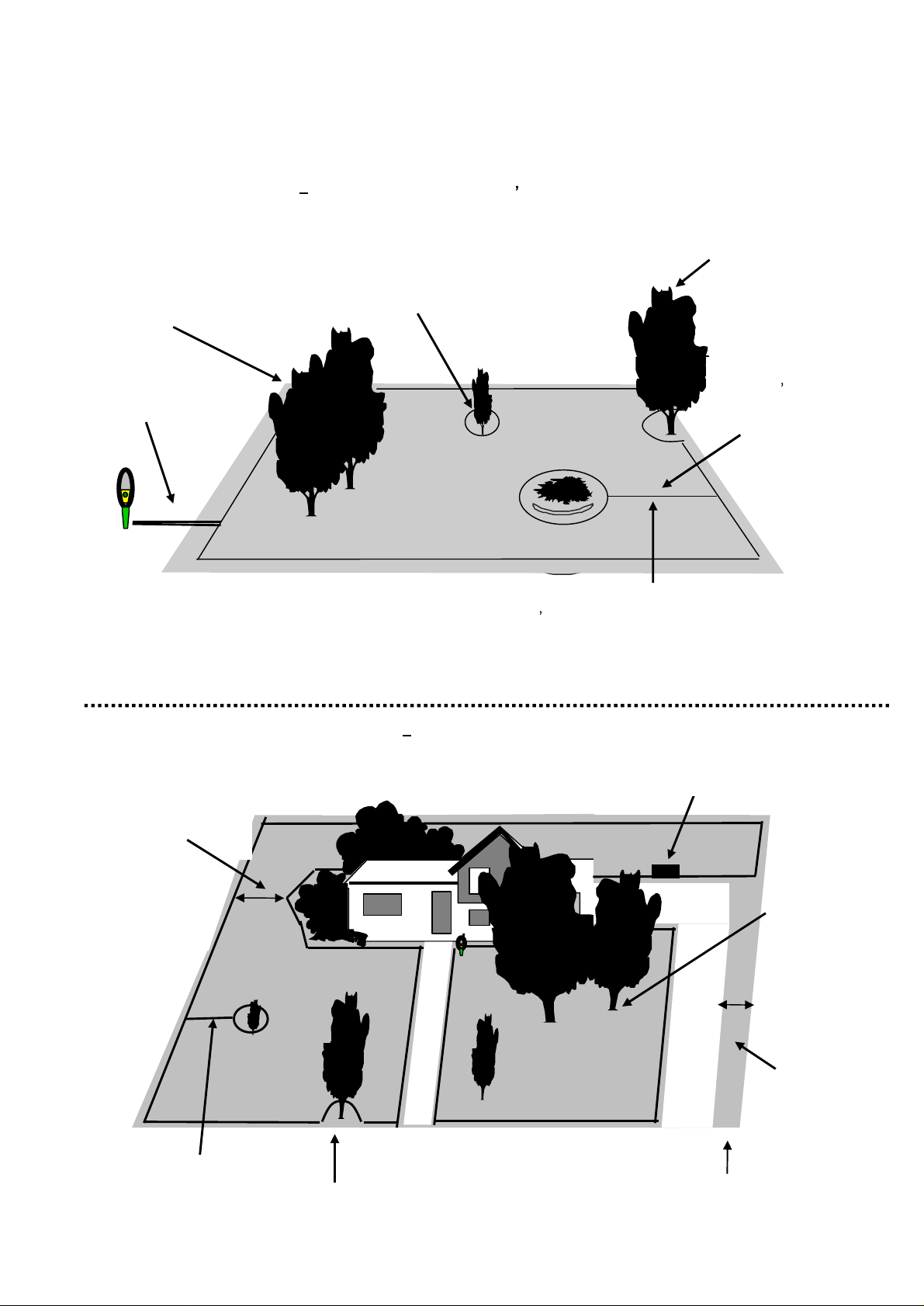
Figura 1.13
Alberi abbastanza grandi per
permettere al Robomower di
urtarli senza richied
perimetrale intorno a loro.
Oltre 0.9m
ere un cavo
Distanza per gli ostacoli dell installazione del cavo perimetrale
Piccoli alberi, devono
essere esclusi con il
cavo perimetrale.
Il Robomower può liberamente attraversare questa sezione, ma esso
continuerà a riconoscere lisola perimetrale. Permettendo questo,
numerosi ostacoli in un prato avranno pochi effetti sul libero movimento
del Robomower o
sulla sua efficienza.
Albero troppo vicino al
perimetro, a meno di 1.2
m, contorno effettuato
con il cavo perimetrale
Distanza minima tra il
cavo dell ostacolo e il
cavo
perimetrale =
1.5m.
.
Passaggi stretti devono
avere una larghezza
minima di 1.7m tra i cavi.
Appezzamento
Distanza superiore a
1.5m.
Figura 1.14
1
Vicino a meno di 1.2
contorno del cavo perimetrale
Installazione di due zone con una zona di Dock
m dal
Docking Station
Appezzamento
2
La larghezza da cavo perimetrale
a cavo perimetrale deve essere
superiore a 1.7
Alberi grandi, idonei
per essere trattati
come un ostacolo e
non esclusi con il
cavo perimetrale.
Accertarsi che siano
a una distanza
minima di 1.2m dal
perimetro.
Area di
larghezza di
0.9m
19
m.
1.9 Appezzamenti/Aree vari
Come è stato già menzionato, la vostra casa può richiedere più di un appezzamento da installare per
permettere
appezzamenti non incide sull
appezzamento ampio. Quando le aree dell
oggetti, è inoltre raccomandato di fare di ognuna un appezzamento separato. Un modo semplice ma
effettivo e diffuso per installare il Robomower è di avere un appezzamento per il giardino anteriore e uno
per il giardino posteriore
dove un appezzamento è una zona di dock.
Il punto è di installare gli appezzamenti che permetterano al Robomower di operare con la massima
efficienza, anche se sono presenti più di uno o due appezzamenti. Troverete presto che tosare il prato in
quelle zone è un processo facile che vi permetterà una più grande flessibilità nelle vostre abitudini di
tosatura. Il Robomower vi dà la capacità di controllare il tempo operativo per ogni appezzamento in modo,
indipendentemente fino a quattro appezzamenti. In questo modo, se un appezzamento richiede un tempo
di funzionamento più breve rispetto a un altro, può essere facilmente impostato per un tale processo.
Vedere
sull
uso di questa opzione. Esistono diversi modi per installare questi appezzamenti, il posizionamento
dell
interruttore perimetrale compreso, a secondo dell
figure 1.14 e 1.15.
al Robomower di funzionare in modo effettivo su tutto il prato. Avere due o anche tre
Capitolo 6, Impostazioni dell
efficienza del Robomower e in molte circonstanze è preferibile a un
erba non sono contigue, o sono separate da barriere o altri
. I giardini laterali possono essere compresi con un sezione anteriore o posteriore,
Operatore e Caratteristiche avanzate
effettivo tracciato del prato. Esempi sono forniti nelle
per maggiori informazioni
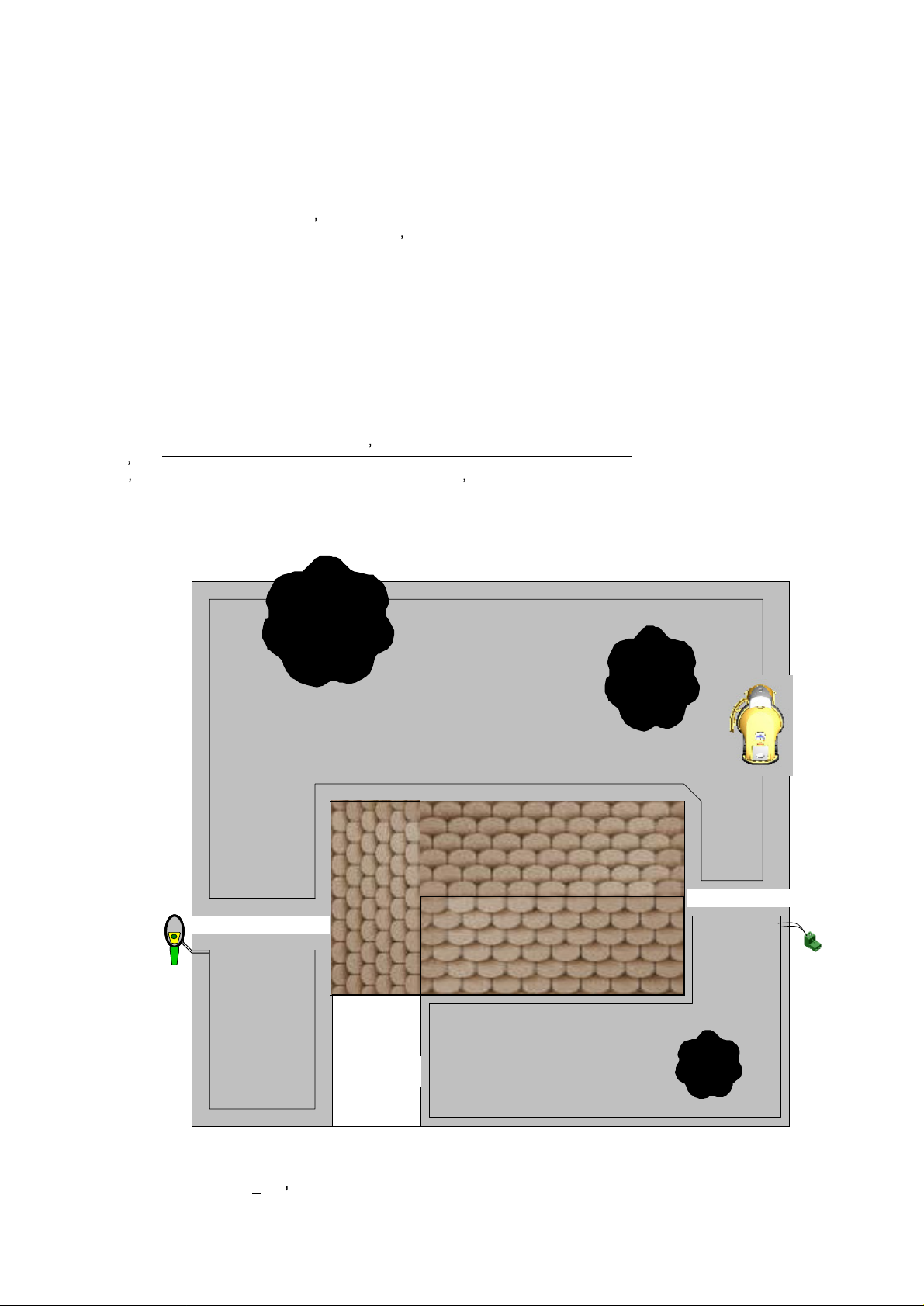
Zona di Dock
Giardino posteriore
Interruttore
perimetrale
Appezzamento
C
Giardino
Laterale
Viale di
Accesso
Casa e garage
Appezzamento B
Giardino anteriore
Docking
Station
Connector
Appezzamento
Figura 1.15
20
Un
interruttore perimetrale per vari appezzamenti con un Docking Station
1.10
Pendenze
Secondo una regola generale di misura, qualsiasi pendenza che possa essere tagliata con un
qualunque tagliaerba può anche esser tagliata con il Robomower in modo automatico. La pendenza
non deve essere superiore a 15 gradi, come per un tradizionale tagliaerba. Ricordate che una
pendenza di 15 gradi, sebbene possa sembrare non molto ripida, è in realtà una pendenza
relativamente ripida. Nei casi in cui si tenta di azionare il Robomower su una pendenza troppo forte, la
parte anteriore della macchina tenterà di sollevarsi un po dal suolo quando sale una pendenza in
modo verticale. Il sensore di sollevamento sarà attivato, smettendo il funzionamento delle lame per
sicurezza. Il Robomower tornerà indietro e tenterà ancora la manovra. In ogni caso, una pendenza che
provoca il sollevamento della parte anteriore del tagliaerba mentre sale è troppo ripida e non deve
essere compresa nella zona di taglio. In certi casi, l area può essere tagliata manualmente con il
Robomower, utilizzando il controllo manuale. Accertatevi che potete mantene
senza pericolo prima di tentare il taglio di un terreno in pendenza in modalità manuale. Se non siete
sicuri del livello di ripidità della pendenza, tentate di guidare il Robomower manualmente sulla
pendenza. Se esso si alza, escl
re una posizione sicura e
udere questa sezione dallaera di lavoro.
AVVERTENZA
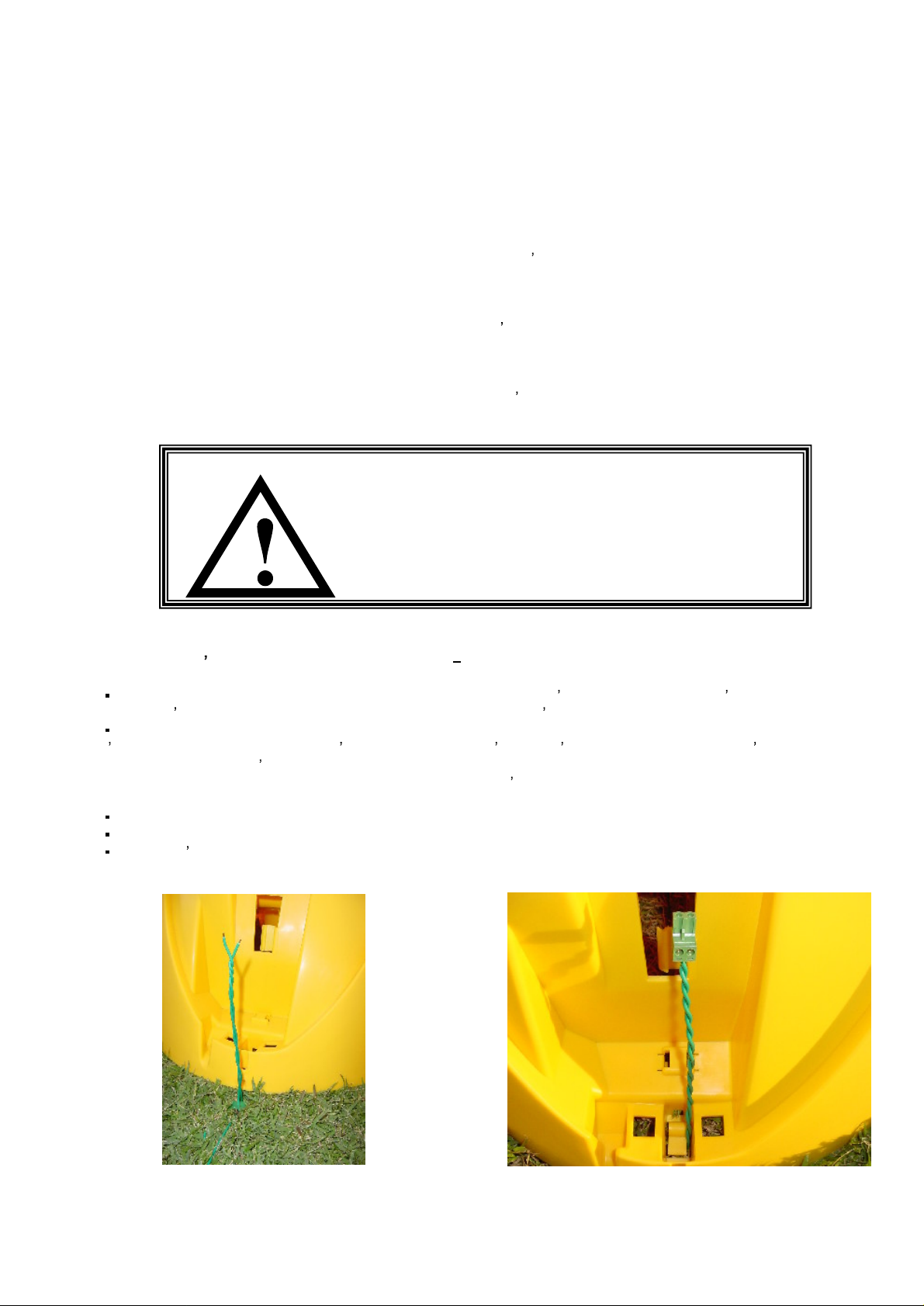
1.11 Fine dell installazione del cavo perimetrale
Quando il cavo perimetrale è completato e fissato al terreno, l ultima tappa per finire loperazione è
collegare l interruttore perimetrale ai cavi perimetrali e di provare linstallazione.
Una installazione corretta del perimetro comporta due estremità di cavi staccate situate dove
l installazione del perimetro inizia; l estremità del cavo dell inizio dell installzione del perimetro e l estremità
del cavo dalla fine dell installazione del perimetrale. Vedere Figura 1.16. Utilizzare gli stessi picchetti per
collegare i due cavi dal prato verso il posizionamento dell interruttore perimetrale come visto in Figura
1.16.
Tagliare i due cavi perimetrali staccati in modo tale che siano di uguale lunghezza.
Scoprire circa mezzo centrimetro di isolante da ciascuna estremit
Inserire un estremit
cacciavite. Vedere Figura 1.17
à in ciascun foro del connettore (un cavo
!
Rischio di lesioni. Quando tentate di tagliare aree troppo
ripide in modalità automatica del Robomower, accertatevi
che potete mantenere una posizione sicura e senza
pericolo prima di tagliare. Tagliare le pendenze in senso
laterale per sicurezza. Indossare sempre delle scarpe
ro
buste quando il Robomower è in modalità manuale.
Docking Zone
à dei cavi (lunghezza minimale 20cm).
per foro) e stringere le viti usando un piccolo
Figura
1.16
Figura
Fine della delimitazione del cavo perimetrale in un Docking Zone
1.17
21
+/
WHITE SUPPLY
-/BLACK
Coperchi
2
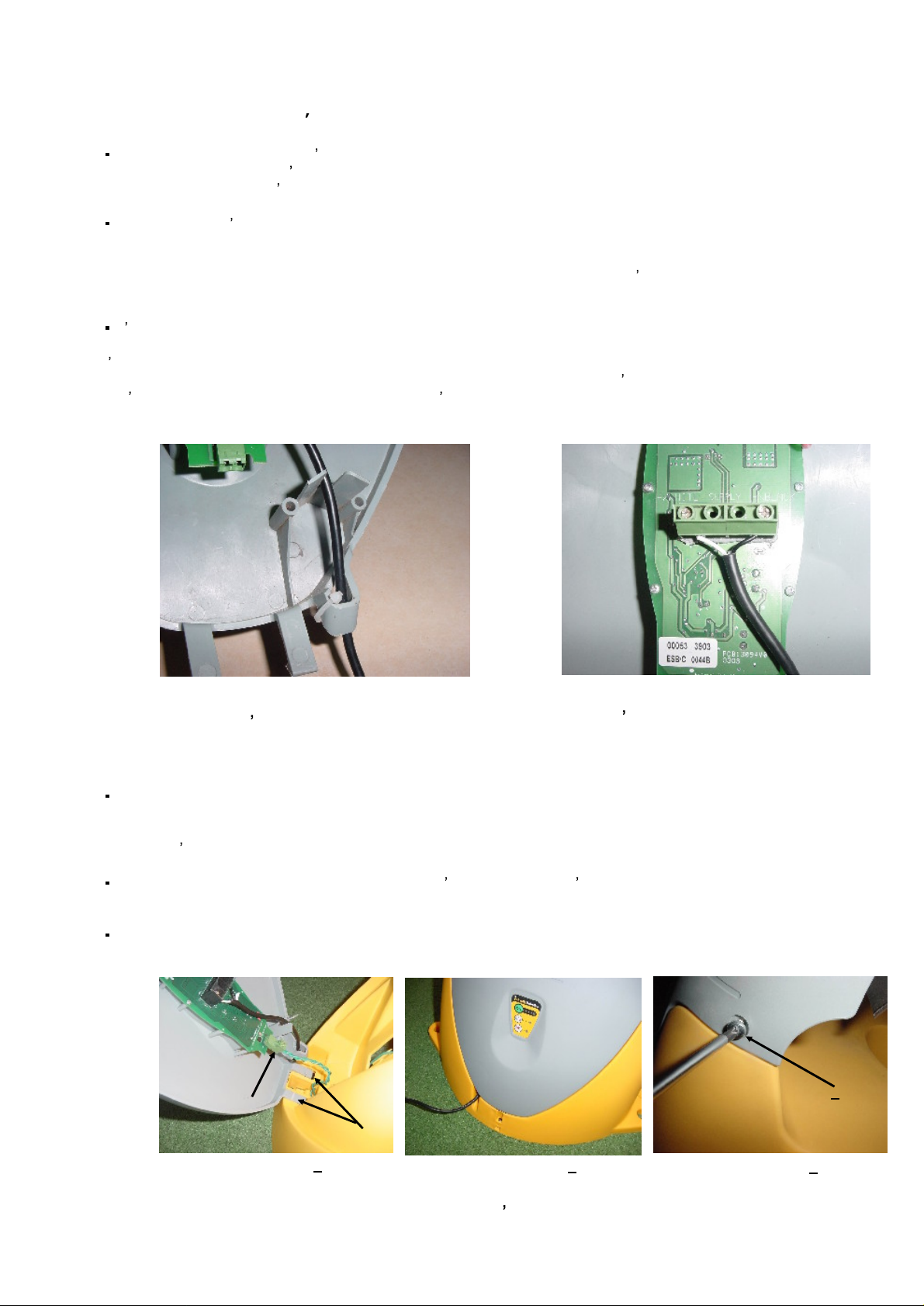
1.12 Assemblare il filo dell alimentazione elettrica al quadro del Docking
Prima di proteggere il filo dell alimentazione del Docking Station, distendere il filo, iniziando dal Docking
Station e condurlo verso l alimentazione elettrica principale per assicurarsi che il Docking Station sia
sufficientemente vicino all alimentazione principale per il filo fornito da raggiungere.
Dirigere il filo dell alimen
la testa bianca posizionata nel foro LH e la testa nera posizionata nel foro RH. Collocare ogni cavo sotto i
respettivi fori e stringere solidamente le viti con un piccolo cacciavite. Vedere Figura 1.19. Infine, collocare
il laccio di nailon del cavo fornito attraverso i fori nella fessura del filo dell alimentazione e stringere.
Vedere Figura 1.18.
L alimentazione elettrica per il Docking Station deve essere collegata al coperchio del Docking Station
tramite il quadro di controllo prima di assemblare il coperchio della base. Riferirsi alla Figura 1.1 per
l identificazione della base e del coperchio. Collocato sulla parte posteriore del coperchio, troverete il
quadro di controllo operativo e le due viti di connettori per fissare il filo dell alimentazione elettrica. Il filo
dell alimentazione ha due teste, bianca e nera. E richiesto collocare la testa bianca nel foro LH (quando
vedete il quadro) e la testa nera al foro RH. Per aiutarvi, sul quadro è iscritto Black (nero) e White (bianco)
sotto i respettivi fori. Vedere Figura 1.19.
tazione elettrica nel coperchio del Docking Station come visto in Figura 1.18, con
Figura 1.18
Dirigere il filo dell alime
1.13
Assemblaggio del Docking Station
Allineare le due linguette sulla parte più bassa del coperchio con le aperture accoppiate sulla parte
anteriore della base, vedere Figura 1.20. Con cautela spingere le linguette del coperchio nelle aperture
nella base come visto. Quando è nella posizione illustrata, collegare il connettore del cavo perimetrale al
quadro dell interruttore perimetrale come visto.
Roteare il coperchio verso la base e confermare l uscita del cavo dell alimentazione fuori dalla tacca nella
base, come visto in Figura 1.21.
Inserire le due viti fornite sui due lati della parte superiore del coperchio. Stringere delicatamente con un
cacciavite Phillips. Vedere figura 1.22.
Connettore
del cavo
perimetrale
ntazione elettrica nel coperchio
Linguette del
coperchio
Filo dell alimentazione dentro il coperchio
Figura 1.19
Base
Viti
1 di
22
Figura 1.20
Assemblaggio del coperchio
e della base
Figura 1.21
Posizione appropriata del
cavo dell alimentazione
Figura
Assembla
coperchio e della base
1.22
ggio del
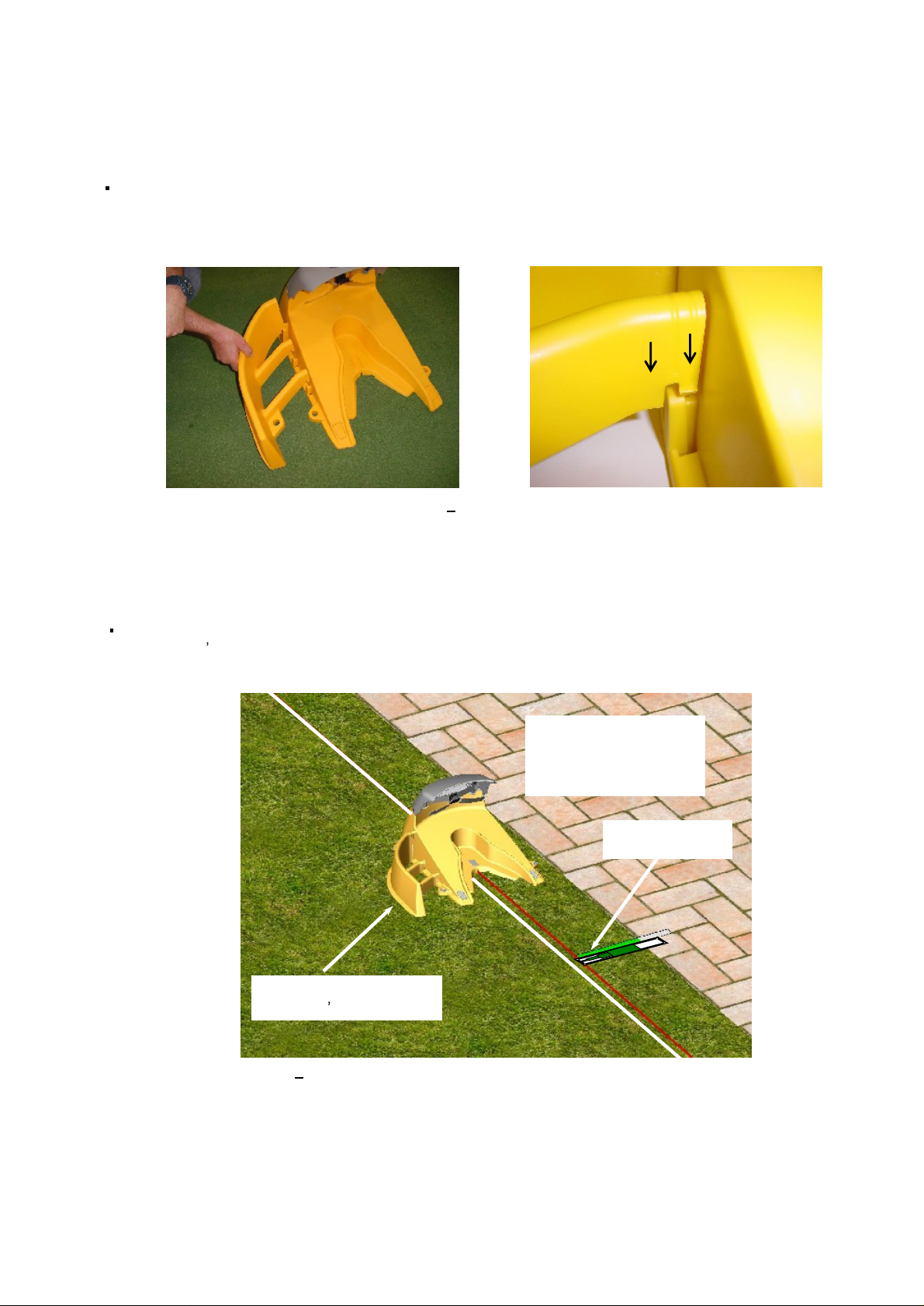
Figura 1.23
Allineamento della copertura laterale
fronte all area del prato
Allineare con cautela le tre fessure della copertura laterale sulla base. Vedere figura 1.23. Una volta
allineato, inclinare solidamente la copertura laterale verso la base fino a quando si avverte lo scatto.
Copertura
laterale
1.14
Posizionare e provare il Docking Station
Utilizzare il RoboRuler per posizionare il Docking Station sul perimetro. La distanza più corta (30 cm) è
usata quando l area esteriore al perimetro del Docking Station è privo di ostacoli ed è alla stessa altezza
del bordo del perimetro (vedere Figura 1.24).
Copertura laterale di
Area fuori dal
p
erimetro: stesso livello
e senza ostacoli.
Distanza corta del
RoboRuler
Figura 1.24
Utlizzare la distanza corta
del RoboRuler per posizionare il
Docking Station
23

'area esterna del perimetro
La distanza lunga è usata (45 cm) quando l area esteriore al perimetro del Docking Station ha un muro o
non è alla stessa altezza del bordo del perimetro. Vedere figura 1.25.
L
ha un mur
o come ostacolo
.
Lunga distanza
del RoboRuler
Figura 1.25
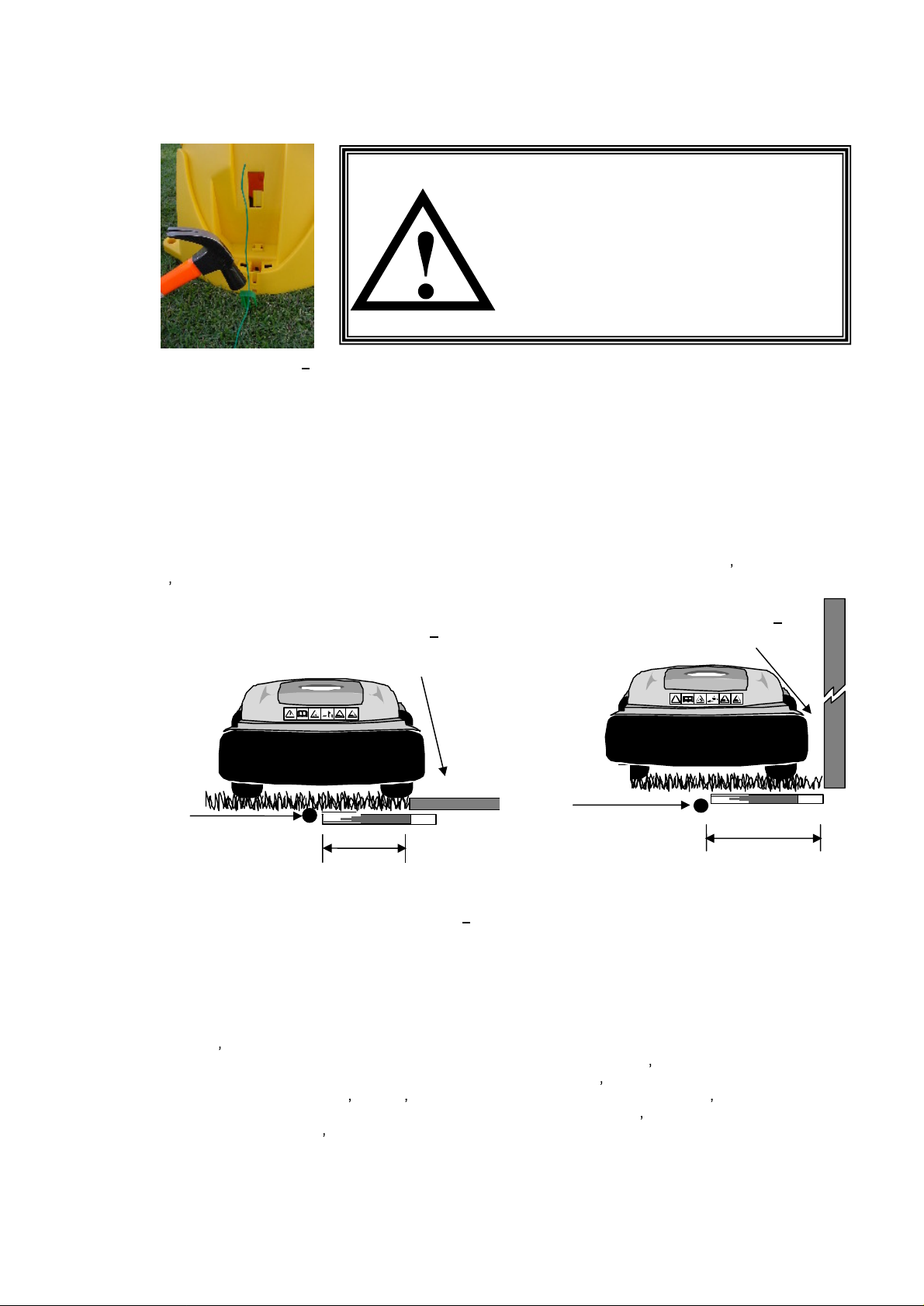
Posizionare il Docking Station mediante un martello per fissare i cinque picchetti. Iniziare con il
posizionamento di una sola parte dei picchetti nel terreno, in modo da poter effettuare degli aggiustamenti
durante la prova. Vedere figura 1.26.
Usare la distanza lunga del RoboRuler per posizionare il Docking Station
24
Figura 1.26
Posizionamento dei picchetti.

Provare l installazione del Docking Station. Collegare l alimentazione elettrica a una presa ad uso
domestico (230 volt.).
Premere il pulsante ON sul pannello di funzionamento del Docking Station.
Un piccolo indicatore lampeggiante di colore verde indica che il sistema è attivo e funziona
correttam
Il pannello operativo del Docking Station ha degli indicatori di ricarica e per segnalare un cavo
perimetrale scollegato/rotto (Figura 1.27).
Il quadro del Docking ha una caratteristica di spegnimento automatico, quindi non dovete spegnerlo dopo
l uso. Si spegnerà da sé quando il tosaerba finisce loperazione.
ente.
Figura 1.27
Pannello di controllo del Docking Station
Pulsante ON e
indicatore luminoso
Indicatore di ricarica
Indicato
perimetrale scollegato/rotto
re luminoso di cavo
1.15 Collocare l alimentazione elettrica e protezione del cavo di bassa tensione collegato al Docking
Station
L alimentazione elettrica è adatta per interni solamente, è richiesta collocarla in un posto riparato,
asciutto, ben ventilato e non esposto ai raggi del sole.
Il cavo dellalimentazione deve essere fissato al terreno con sicurezza per evitare scosse elettriche. I
picchetti utilizzati per proteggere il cavo perimetrale possono essere anche utilizzati per proteggere il cavo
dell alimentazione.
Evitare superficie dove non può essere fissato, come i marciapiedi. Se questo non può essere evitato,
contattare un professionista per collocarlo sotto la superfi
Per un ultima protezione, considerare un posizionamento sotterraneo allinterno di un condotto protettivo.
cie di queste aree.
25

connettore
Installazione
1.16
Posizionamento dell
Trovate un posto conveniente fuori dal perimetro, facile di accesso. Pensate a posizionare
l
'interruttore perimetrale vicino a
Ora, il posizionamento dell interruttore perimetrale individuato, potete cominciare l installazione del
cavo perimetrale in ogni posizionamento, come spiegato nei passi 1
1.17
Fine dell installazione
Quando il cavo perimetrale è completato e fissato al terreno, l ultima tappa per finire l operazione è di
collegare l interrutore perimetrale ai cavi perimetrali e di provare l installazione. Un'installazione
corretta del perimetro comporta due estremità di cavi staccate situate dove l installazione del perimetro
inizia; l estremità del cavo dell inizio dell installazione del perimetro e lestremità del cavo dalla fine
dell installazione del perimetrale. Vedere Figura 1.9. Srotolare i due cavi perimetrali staccati e ben tesi
e fissarli al terreno, a contatto fra loro, mentre uscite dal perimetro e andate verso il posizionamento
dell interruttore perimetrale (utilizzare gli stessi picchetti per collegare i due cavi dal prato verso il
posizionamento dell interruttore perimetrale.
in
zona di Non-Dock
'interruttore perimetrale e installazione d
degli arboscelli o a degli cespugli per nasconderlo.
.3 a 1.10.
el cavo perimetrale
Notare che i cavi sono paralleli e a contatto fra loro andando dal
perimetro all interrutore perimetrale. Fissare saldamente nel terreno
andand
Due estremità di cavi
dall installazione del
perimetro. Interruttore
perimetrale > 1
perimetro
Al posizionamento dellinterruttore perimetrale, tagliare i due cavi perimetrali staccati in modo tale
che siano di uguale lunghezza. Scoprire circa mezzo centrimetro di isolante da ciascuna estremità dei
cavi. Inserire un estremità
m dal
.
o dal perimetro verso il posizionamento dellinterruttore.
Figura 1.28
Fine della delimitazione
26
Scoprire circa mezzo
centrimetro di isolante da
cia
scuna estremità dei cavi e
inserire un estremità in
ciascun foro del connettore.
Figura 1.29
Utilizzare un piccolo
cacciavite piatto, stringere
queste due viti per fissare
i cavi perimetrali nel
-
Inserimento e fissaggio del cavo perimetr
ale al connettore

Figura
1
.31
Inserire le batterie
luminoso
batterie
Prendere l interrutore perimetrale e schiacciare le linguette sui due lati dellinterruttore perimetrale
come si vede nella figura 1.11, e togliere la copertura posteriore dall interruttore perimetrale.
Inserire le 3 batterie C nel contenitore batterie come si vede nella figura 1.12 e rimontare l interr
perimetrale.
uttore
Figura
1.30 - Schiacciare per togliere la
parte posteriore
1.18
Provare l interruttore perimetrale
Inserire il connettore del cavo perimetrale nell interruttore perimetrale (vedere figura 1.32) e premere
il pulsante ON . Un piccolo segnale luminoso verde lampeggiante vicino al pulsante ON indica che il
sistema è accesso e funziona correttamente. Linterruttore perimetrale dispone anche di un segnale di
batterie scariche e di un indicatore quando il cavo perimetrale non è collegato.
Figura 1.32
Inserire il connettore serracavi
nell interruttore perimetrale
Pulsante ON
e
indicatore
Indicatore
Sostituzione
Figura 1.33
Pannello di funzionamento
batterie
Indicatore
Sostituzione
dell interruttore
L'in
vostra lo spegnimento dopo ogni uso. Si spegnerà da solo dopo 5 ore continue di funzionamento. Buone
batterie alcaline nell'interruttore perimetrale dovrebbero durare oltre una stagione normale di taglio. Potete
spegnere manualmente l'interruttore perimetrale premendo il pulsante ON per 3 secondi. Sentirete un
segnale dopo i 3 secondi, che indica che potete rilasciare il pulsante e che l'interruttore è
terruttore perimetrale ha una funzione di spegnimento automatico, che rende non necessario da parte
spento
27

1.19
Collocare l
Il connettore dell'interruttore perimetrale è progettato per veloci e facili scollegamenti, una caratteristica
flessibile quando il prato richiede più di un appezzamento. Potete facilmente scollegarlo
semplicemente i connettori. Questo vi permette di spostare l'interruttore perimetrale tra gli appezzamenti.
L'interruttore perimetrale viene montato con un picchetto largo inserito nella parte inferiore dell'interrutt
perimetrale, questo vi permette di spostarvi da un appezzamento all'altro, portando l'interruttore scollegato
attaccato al picchetto. Inserirlo nel terreno all'interno del cavo perimetrale per ogni appezzamento. Vedere
Figura
1.34.
Un'altra opzione di posizionamento è di montare l'interruttore su una superficie verticale, come un muro o
una staccionata. Ci sono tre fori per le viti sulla parte inferiore dell'interruttore a fine di montarlo in questo
modo.
Utilizzare delle vit
va montato verticalmente in modo di mantenere la sua resistenza all'acqua e preferibilmente in un posto
asciutto e ripararato
'interruttore perimetrale
i di lamiera
.
#6 o #8, o equivalente. Vedere Figura 1.35
. In ogni caso,
separando
ore
l'interruttore
Figura 1.34
Interruttore perimetrale
montato su un picchetto
L'
interruttore perimetrale
deve essere montato
verticalmente
in modo
sua resistenza all'acqua
Scollegare il connettore
dell'interruttore perimetrale
da
mantenere la
e spostarlo a un nuovo
appezzamento
Montare l
perimetrale utilizzando tre
fori di montaggio sulla parte
'interruttore
Figura
1.35
28

Paraurti con s
ensori
tattili
Dispositivo di
controllo manuale
gruppo
spia di
Capitolo 2
Impostazioni iniziali
spine di contatto di
ricarica
maniglia per il
trasporto
funzionamento
batterie
2.1 Inserire il fusibile del gruppo batterie
Il vostro Robomower è fornito con il fusibile del gruppo batterie e non può funzionare senza. Il fusibile
è situato in una bustina di plastica attaccata alla parte superiore del gruppo batterie. Togliere il g
batterie dal Robomower e inserire il fusibile. Il fusibile può essere inserito in qualsiasi direzione.
Vedere Figura 2.2
Con cautela abbassare il gruppo batterie nel Robomower. Ora il Robomower si accenderà. Il gruppo
batterie è ricaricato prima di essere venduto in modo da effetuare l'installazione iniziale e le prove.
Tuttavia, dopo che il processo di installazione iniziale sia completato bisogna
ore. Vedere Capitolo
4,
Ricarica
prima
.
ricaricare
ruppo
per 20
Figure
Inserire il fusibile del gruppo batterie
nel suo contenitore.
essere inserito in qualsiasi direzione.
2.2 Inserire il fusibile nel gruppo batterie
Il fusibile può
29

manuale
2.2 Utilizzo del pannello di c
Il Robomower è equipaggiato di un pannello di controllo manuale. Esso permette di guidare e di
azionare il tosaerba manualmente. Per cominciare ad usare il pannello di controllo manuale,
la
figura 2.3 per vedere le varie operazioni di controllo e le loro funzioni.
Operazioni Manuali
1.
Pulsante innesto
lame
2
.
Pannello con
schermo LCD
3.
Pulsante di
annulamento
4.
. Pulsante di
accensione&GO
1. Pulsante innesto lame
operare.
Presenza dell'Operatore. In qualunque momento, rilasciate il pulsante di innesto delle lame , le
lame smetteranno la loro azione e le tappe precedenti dovranno essere ripetute. Vedere parte 3.8
per maggiori informazioni sulla tosatura manuale.
Questo è chiamato un progetto OPC di due digitazioni, dove OPC significa
ontrollo manuale
per tutte le informazioni su come usare il pannello di
Figura 2.3 - Pa
L'innesto delle lame in manuale richiede d
nnello di dispositivo
Vedere
controllo manuale.
ue digitazioni del pulsante per
capitolo 5,
8.
Pulsante di
navigazione
7.
Pulsante di controllo
manuale della volocit
veloce/lenta
6.
scorrimento menu
5. Stop/Pulsante
Controllo de
studiare
le
à
Tasti di
lla
2.
Pannello a cristalli liquidi
dell'
apparecchio ed anche il livello delle batterie. Se viene esposto direttamente ai raggi del sole
per un lungo periodo, il pannello potrà essere difficile da leggere. Collocarlo in un posto riparato
dal sole
3.
Pulsante di annull
sequenza delle due digitazioni in modo da azionare le lame in modalità manuale. In più, questo
pulsante viene utilizzato per annullare la selezione visualizzata sul pannello a Cristalli Liquidi
quando l'utilizzatore compie una selezione. Viene inoltre utilizzato per ritornare alla schermata
precedente del menù opzioni e ritornare al menù principale.
4.
Pulsante di accensione
per confermare le selezioni fatte dall'utilizzatore che sono visualizzate sullo schermo a cristalli
Liquidi.
5.
S
lame e alle ruote quando il Robomower è in modalità automatica. Può essere utilizzato anche per
arrestare un'operazione in via d'esecuzione prima che sia cominciata.
6.
Tasti di scorrimento menù
opzioni del menù, che sono visualizzate sul pannello a Cristall
frecc
effettuata.
7.
Controllo manuale della velocità
lent
quella opposta. Quando è in modo veloce, basta premere il pulsante per fare passare alla velocità
lenta e viceversa. Il tosa
per attivare la funzione.
e ritornerà
top
/Pulsante di Arresto
e su e giù permettono di scorrere le diverse opzioni del menù quando una selezione va
a. Per cambiare la velocità premere il pulsante una volta per cambiare la velocità e passare a
velocemente
amento
erba deve essere spostato utilizzando la caratteris
Il pannello grazie ai cristalli visualizza I messaggi relativi all'uso
normale.
come descritto al punto 1, questo pulsante viene usato nella
E' il principale pulsante per le operazioni automatiche. E' inoltre usato
Premendo questo pulsante si arresta qualsiasi azione relativa alle
I tasti con le freccette, su e giù, permettono di scorrere le diverse
i Liquidi come messaggi di testo. Le
Il controllo manuale è equipaggiato di due velocità veloce e
tica
di controllo di guida
8. Pulsante di navigazione
guidare manualmente il robottino tagliaerba nella direzione desiderata. Con una leggera pressione
sul tasto di navigazione, è possibile farlo delicatamente roteare nella direzione desiderata. Il
30
Premendo questo
tasto nella direzione desiderata vi sarà permesso di

Avanti
Retromarcia
Sinistra
Destra
Leggera
Leggera
Leggera
G
uidare il Robomower utilizzando
pulsante di guida è dotato di tutte le direzioni e inoltre mantenendo una pressione costante si
continua l'operazione.
2.3 Funzionamento manuale e automatico
Il Robomower è progettato con sicurezza in modo che il funzionamento in modalità manuale sia
proibita
dell'utilizzatore per azionare i pulsanti. Vedere Figura 2.4. La modalità manuale viene usata in primo
luogo per guidare il Robomower nel prato e per farlo tornare dopo il taglio. Viene anche utilizzata per
spos
Il controllo manuale permetterà anche il funzionamento manuale delle lame. Associata alla funzione
di guida, questo permetterà di effettuare delle leggere guarnizioni e di tosare in aree nelle quale il
Robomower non può operare. Inoltre, il funzionamento automatico è proibito quando il controllo
manuale è tolto dal suo s
solidame
t
agliaerba prima di poter procede
a meno che il Controllo
tare il Robomower verso altre a
nte posizionato nel suo supporto e inclinato verso il basso, allineato alla superficie del
Manuale
upporto
non sia stato tolto dal suo supporto e che sia in possesso
ree se necessario.
e in possesso dell'utilizzatore. Il controllo manuale deve essere
re in modalità automatica.
Vedere Figura 2.5.
Togliere il Controllo manuale
utilizzarlo in modalità manuale
Figu
ra 2.4
2.4 Spostamento del Robomower
A fine di guidare e spostare il Robomower utilizzando il controllo manuale, inserire il dito nell'apposita
dentellatura del tagliaerba sulla parte superiore a sinistra del controllo manuale e girare verso l'alto
permettendovi di afferrare e di togliere il controllo manuale. Figura 2.3. La guida si effettua tramite
leggere pressioni sul tastierino direzionale con il pollice o l'indice nella direzione che desiderate.
Vedere
corrispo
situate sulla parte posteriore del tagliaerba. Il Robomower girerà a sinistra quando la freccia di
direzion
tra
svolta avanti
Figura 2.6. Avanti e retromarcia sono indicate direttamente sopra e sotto le frecc
ndenti sul tastierino direzionale. Avanti e retromarcia sono determinate da una posizione
e sinistra sarà
le prinicipali frecc
sinistra
e in qualunque direzione darà un svolta leggera in quella direzione.
e
.
Guida manuale del Robomower
premuta e a destra quando
il Controllo Manuale
Leggera svolta
avanti destra
la freccia di direzione destra sarà
Figura 2.5
Il dispositivo
manuale va abbassato e
allineato alla superficie del
Abbassare e allineare il
Controllo Manuale
premuta. Premere
del C
tagliaerba
Tastierino direzionale
ontrollo
.
e
del dispositivo
controllo manuale
(pulsante di
navigazione)
di
svolta
retroma
rcia
svolta
Figura 2.6
retromarcia
Uso del tastierino direzionale
31

Figure
2
.7
Regolazione dell
'
altezza di taglio
nello scom
parto del
0
.5 cm.
2.5 Regolazione dell
Togliere il gruppo batterie prima di effettuare qualsiasi regolazioni. Il Robomower possiede due
regolazioni di base, l'altezza di taglio e la distanza dal terreno. Quando usate le lame su altezza di taglio
alta, l'
altezza di
da2.5 cm a 6.4 cm. Usando le piccole ruote, l'altezza minima di taglio impostata è di 20 mm. La distanza
al terreno possiede due (tre quando usate le piccolo ruote) posizioni regolabili. La regolazione
dell'altezza di taglio è situata sulla ruota anteriore ed è controllata ruotando il mozzo della ruota anteriore
all'interno o all'esterno
Ruotare il
ruota anteriore all'interno
(
più basso) o all'esterno
(
più alto) per regolare
l'
altezza di taglio. Ogni
"
clic" rappresenta un
livello di altezza di circa
Ruotare in que
'altezza
taglio è regolabile approssimativamente da 3.8cm a 8.
mozzo della
direzione per il
taglio più
di taglio
, il ch
é alzerà o abbasserà la ruota anteriore. Vedere Figura
sta
alto
e della distanza dal terreno
Ruotare in questa
direzione per il
taglio più basso
9 cm e con l'altezza di taglio bassa
2.7.
AVVERTENZA
Rischio di lesioni gravi
regolazione dell'altezz
sollevare mai o tentare di regolare l'altezza di taglio durante
funzionamento
lacerazioni. Quando lavorate intorno o vicino alle lame indo
La regolazione dell'altezza dal terreno è situato nello scomparto del gruppo batterie del tagliaerba.
Vedere
superiore, bassa e media) La posizione più bassa (più vicina all'estremità dell
batterie) fornisce il livello più alto di distanza dal terreno mentre la posizione più alta (più lontana
all'estremità dello scomparto del gruppo batterie) fornisce il livello più basso di distanza dal terreno.
Vedere Figura 2.9. E' raccomandato regolare la distanza posteriore al massimo, che sarebbe la
posizione più vicina alla base dello scomparto del gruppo batterie. Per i prati europei e i prati di cui
l'erba è tagliata all'altezza minima di 5 cm regolare la distanza dal terreno al livello minimo può
risultare la scelta migliore.
La regolazione
dell'altezza posteriore
dal terreno
Figura 2.8. Essa possiede due posizioni, superiore e inferiore. (Le ruote piccole
è situata
.
.
Togliere sempre il gruppo batterie durante la
a di taglio o sollevare il tos
Le lame sono molto affilate, rischio di
dei guanti robusti
aerba dal terreno. Non
.
o scomparto
il
gravi tagli o
ssare sempre
ne ha
del gruppo
Per regolare
l'
la linguetta e farla
scorrere verso
l'
basso
nno
tre;
altezza, estrarre
alto o verso il
.
32
Figura
2.8 Posizione distanza dal terreno
Figura 2.9 Regolazione della distanza
dal terreno

2.6 Impostazioni ed esecuzione della Calibratura
Il Robomow usa un sistema direzionale sofisticato che utilizza un
compasso
terra a un all'altro a secondo della posizione geografica. In modo da provvedere a questa
discordanza,
viene usato. Questo è un processo unico che non sarà necessario ripetere a meno che il taglierba
venga spostato da centinaia di chilometri
La taratura è un processo semplice e il Robomower è disegnato in modo da chiedervi di eseguire
questa procedura prima di poter essere utilizzato in modalità automatica. Estrarre il pannello di
controllo e posizionare il Robomower in una zona pianeggiante del prato. Se l'erba è molto alta,
regolare l'altezza e la distanza dal terreno sulla posizione più alta. Posizionare il Robomower al
centro dell'aerea e inserire il controllo manuale nel supporto e abbassarlo allineato alla superficie del
tagliaerba. Potete aiutarvi con il filo avvolto collegato al controllo manuale situato nella parte
posteriore.
operative per eseguire questa operazione. Sarete ora al prima display visto in Figura 2.10. Seguire
sequenza illustrata in Figura 2.10 per completare il processo di configurazione.
Durante la taratura, il Robomower inizierà a girare lentamente in cerchio, fermandosi ogni tanto. Il
Robomower può eseguire quattro cerchi completi durante questa procedura, fermandosi più volte per
diversi secondi ogni volta. Sul pannello a Cristalli Liquidi
lampeggiante
(Test Passato Premere C), il proc
Dock Zone - Premere
, che risponde ai poli magnetici della terra. Il nord magnetico può variare da un punto della
è necessario tarare il dispositivo del compasso all'area della terra dove il tagliaerba
Accendere l'interruttore perimetrale per attivare il cavo perimetrale, che deve essere
Wait' (Aspetta). Solo quando il messaggio visualizzato sarà, Test Passed Press C'
esso sar
Go o Zona A
dispositivo
dalla sua presente collocazione. Vedere Figura 2.10.
verr
à scritto un messaggio di testo
à completo.
MAX .
Premere il pulsante C
di quadro tipo
per tornare al men
la
ù di
Sebbene sia raro, può essere che il tentativo di taratura fallisca, con il messaggio sul pannello
Elsewhere' (Ricominciare altrove). Q
Significa che qualcosa vicino dà troppo interferenze per ottenere un'accurata taratura. Possono
essere oggetti di metallo oppure cavi sotterranei. Quando la taratura è eseguita, queste interferenze
non causerànno nessun problemi al Robomower. Per ripetere il processo di taratura, posizionare il
Robomower altrove ad almeno 3 - 4.5 m dal primo luogo, e ripetere le stesse procedure. Quando la
taratura sar
à completata, il messaggio di richiesta di taratur
uesto
è raro e non indica un problema con il Robomower.
a non apparirà più.
Retry
33

Premere
GO
Premere
GO
Premere
GO.
Il
Pronto per la tosatura
Figura
Pannelo a
Cristalli Liquidi
Dock Zone MAX
Dock Zone MAX
Press GO
Press GO
Set Country
Set Country
Press GO
Press GO
Not Set!
Not Set!
Scroll
Scroll
USA
USA
USA
Confirm
Confirm
Confirm
2.10 Procedura di taratura
confermare la selezione
Azione
Scorrere su e gi
trovare il vostro paese
Premere GO
richiesta
Premere GO
ù per
per
Dock Zone: MAX
Dock Zone: MAX
Press GO
Press GO
Calibration
Calibration
Activate Motors
Activate Motors
Test Passed
Test Passed
Dock Zone: MAX
Dock Zone: MAX
Req
Req
Press GO
Press GO
Press GO
Press GO
Press C
Press C
Press GO
Press GO
Premere GO
processo inizier
durerà 1-2
Premere il pulsante
minut
à e
i.
C
34

Premere GO per confermare ON
Premere GO e scorrere per vedere ON
Enable Dock ON
2. 7
Attivare l opzione Docking Station
Premere il pulsante GO e lo schermo seguente sarà visualizzato:
Enable Dock ON
Press GO
Confirm
2.8 Provare il
E preferibile provare la posizione del Docking Station e considerare se alcuni piccoli aggiustamenti
devono essere eseguiti prima di fissare i picchetti rimanenti. Posizionare il Robomower verso il cavo
perimetrale, a una distanza minima di 3 m prima del Docking Station per permettere al tosaerba di
stabilizzarsi sul cavo. Vedere figura 2.12.
Docking Station e la posizione del cavo perimetrale per il Docking
Figura 2.11
Attiva
re la funzione Docking
Distanza min. di 3m
Figura 2.12
Controllare che il cavo perimetrale collegato al Docking Station sia
picchetti se necessario.
Inserire il controllo manuale nel suo supporto e rotearlo per allinearlo.
Controllare che On lampeggi sul pannello operativo del Docking Station.
Premere una volta la freccia di scorr
Go to dock e quindi premere GO.
Seguire il Robomower e controllare che sia agganciato
fatto attraverso i due contatti di metallo sul
lamiera di contatto di metallo situata sotto il coperchio del Docking Station. Se necessario, spostare
leggermente il Docking Station per centrare bene questi contatti.
Una volta completata
fissate definitivamente i 5 picchetti che bloccano il Docking Station nel terreno.
la prova
imento superiore sul controllo manuale per visualizzare il messaggio
e
ottenuto un soddisfacente
Provare l installazione del Docking Station
fissato nel terreno. Proteggere i
propriamente
la parte anteriore del Robomower che si agganciano con la
posizionamento del Docking Station,
nel Docking Station. Questo è
35

Figura
2
.13
Provare il posizionamento del cavo perimetrale
2.9
Provare il posizionamento del cavo perimetrale per la tosatura dei bordi:
Come menzionato nel Capitolo 1, è preferibile provare il posizionamento del cavo perimetrale per la
tosatura dei bordi in modo da determinare se alcune piccole regolazioni del posizionamento del cavo
perimetrale
la tosatura dei bordi, se il cavo è posizionato troppo vicino a un muro o ad un'altro oggetto fisso, il paraurti
si attiverà quando urterà l'oggetto, poi si sposterà dal bordo per evitare l'oggetto. Ci sono altri casi in cui il
cavo perimetrale deve essere aggiustato, come lungo le aiuole o lungo i marciapiedi quando c'è un
dislivello sul bordo.
Posizionare manualmente il tagliaerba approssimativamente a 1m dal cavo perimetrale. Posizionare il
Robomower verso il cavo perimetrale (Vedere figura 2.11) lungo qualsiasi bordo dell
Inserire la parte posteriore del controllo manuale nel supporto, allineandolo alla superficie del tagliaerba.
Accertarsi che l'interruttore perimetrale sia acceso.
sono
necessarie prima di fissare gli altri picchetti del
cavo. Perché i paraurti sono attivi durante
Posizionare il Robomower
verso il cavo, dopo il docking
station
'appezzamento.
Premere una volta la freccia di scorrimento superiore per l
Camminare accanto al Robomower mentre esso segue il bordo. A qualsiasi punto dove il posizionamento
del tagliaerba è troppo vicino alla parte esterna del bordo dell'appezzamento del prato, segnare questa
aerea e spostare leggeremente il cavo verso l'interno. Ad esempio, se il paraurti del tagliaerba urta il muro
di casa mentre tenta di tosare il bordo, il cavo è troppo vicino al bordo e necessita un riposizionamento
verso l'interno del prato, e lontano dal muro. Viceversa, se il tagliaerba non tosa abbastanza vicino ad
oggetti come muri o marciapiedi, bisogna posizionare il cavo più lontano dall'interno del prato, verso il
muro o il marciapiede. Riposizionare il cavo lungo ogni sezione quando un cambiamento deve essere
effettuato, spostandolo leggeremente ogni volta, poi provare di nuovo la tosatura del bordo in questa area
Ripetere questo processo per l'intero bordo fino ad ottenere il perimetro completo senza urto di oggetti e
un'altezza di taglio soddisfacente sulla parte adiacente dell'area
Quando la procedura è completata, tornare lungo il perimetro e fissare i picchetti del cavo dove non sono
ancora abbassati sotto il livello dell
36
'erba.
'opzione
.
Go to dock
e premere
GO.

Capitolo 3
Funzionamento manuale e automatico
3.1 Attivare l
Area/zona con il Docking Station
3.2 Partenza manuale
La partenza manuale pu
-
Tagliare il
-
Quando il prato
persone .
'interruttore perimetrale Zona di Dock
Se il Robomower opera dal Docking Station in partenza automatica o manuale (vedere paragrafi
3.2 e 3.3), il Robomower accenderà e spegnerà automaticamente l'interruttore perimetrale al
pannello di controllo del
prato ad orari diversi da quelli programmati
è occupato e pr
Per iniziare una partenza manuale per tagliare , premere una volta il pulsante GO per avviare
sequenza:
1. Il Robomower part
al perimetro e fino a raggiungere
retromarcia e tornerà per continuare la tosatura del
2. Il
Robomow
Un messaggio Searching entry è visualizzato sul display del controllo manuale mentre cerca il
punto d'ingresso del prato. L'
distanze specifiche dal Docking Station.
operazione per poi cominciare di nuovo alla posizione una.
Per saltare il processo di tosatura dei bordi, premere due volte GO quando inizia la pa
manuale e il taglio.
er determinerà automaticamente il punto d'ingresso del prato dal cavo perimetrale.
Docking Station
ò essere utilizzata nei casi seguenti
ima il
irà
dal
Docking Station
per coincidere
.
terreno deve essere liberato da
e seguir
il
Docking Station. Inizierà brevemente al dock, ma poi far
RL1000
è programmato per tre punti d'ingresso differenti, a
à automaticamente il cavo perimetrale intorno
l'interno dell'area.
Andrà al prossimo punto d'ingresso con ogni
con i momenti
:
oggetti, animali domestici o
di partenza e di dock.
la
à
rtenza
3.3 Partenza automatica
La modalità di partenza automatica è utilizzata come soluzione completamente automatica
per mantenere
Questa modalità vi permette d'installare un programma settimanale, nel quale il tagliaerba
inizierà automaticamente a tosare e tornerà al dock quando avrà finito, ai giorni e orari
programmati da voi
Per installare il programma settimanale riferirsi al Capitolo 4, Installare il programma
settimanale.
AVVERTENZA!
Rischio di lesioni gravi. Accertarsi che i tempi programmati di operazione per una
pa
rtenza e una tosatura automatiche sia
di animali domestici e di bambini. Non programmare tempi se non siete sicuri che
il
vostro prato.
.
l'area sa
no t
empi in cui l'area di taglio sarà
rà priva di animali domestici, bambini o persone.
priva
37

No Wire Signal
AVVERTENZA
!
3.4 Tornare al
Docking
Il
e re
L
Potete manualmente inviare il tagliaerba al
-
- Controllare che l'interruttore perimetrale sia accesso e che il tagliaerba sia diretto verso
-
- Il Robomower
Docking
-
-
-
3.5
Attivare l
Il Robomower non può operare senza che l'interruttore perimetrale sia acceso e che il tagliaerba sia
posto all'interno del perimetro attivo. Collocare o collegare l'interruttore all'appezzamento che volete
tosare
l'
interruttore
un indicatore luminoso verde situato vicino al pulsante
correttamente.
presente un problema con le batterie o il perimetro. Guardare quale indicatore rosso lampeggia per
individuare il problema. Dovete risolvere il problema prima di azionare il Robomower in modalit
automatica.
Cristalli Liquidi visualizza il mess
accendere l
Docking Station
automatico
Robomow
sterà pronto
'opzione
Riporre il controllo manuale nel suo supporto
qualunque parte del cavo perimetrale (non un
Premere una volta la freccia di scorrimento superiore per visualizzare il messaggio dell
Go to dock
messaggio Searching dock
Guidare il
sul controllo manuale.
Una volta nel Docking Station, riporre il controllo manuale nel supporto, roteare e allineare alla
superficie.
Con
. Premere il pulsante ON
er torna automaticamente al
per la successiva
Go to Dock
e premere
manuale del
Robomow
trollare che sul display sia visualizzato l'icona di ricar
'interruttore perimetrale
è premuto, indicando che è accesso. Per verificare il funzionamento dell'interruttore, c'è
Se un segnale acustico intermittente viene sentito dopo aver acceso l'interruttore, è
Nel caso in cui avete dimenticato di accendere l'interruttore perimetrale, il pannello a
'interruttore
Docking Station
partenza programmat
(Andare al Dock)
GO.
trover
à il cavo perimetrale e seguirà il cavo verso il Docking Station
(Cerca dock)
Robomow
er manualmen
.
er con il controllo manuale
aggio
Docking Station
e roteare per allinearlo alla superficie.
'isola o un ostacolo escluso).
è visualizzato durante questa sequenza
te nel
Docking Station
Non-Docking Zone
per attivare l'interruttore. Sentirete un breve segnale quando
Nessun segnale di cavo (Figura 3.0), ricordandovi di
alla fine di ogni
a.
da ogni punto del prato.
utilizzando i
ica, indicando un dock riuscito.
ON
che lampeggerà quando funziona
operazione
pulsanti di navigazione
. Si ricaricher
.
à
'opzione
il
à
Se un indicatore di taglio lampeggia, accertarsi di aver collegato l'interruttore perimetrale al cavo
perimetrale utilizzando il piccolo connettore verde. Se l
inserire nuove batterie C. Se questo non risolve il problema, riferirsi al
risoluzione dei problemi per un ulteriore aiuto.
Rischio di lesioni gravi o morte. Questa macchina possiede delle
lame in rotazione. Quando funziona in modalit
allontanare bambin
permettere a bambini o animali
3.6
Posizionare il Robomower sul prato
Toglie
re il controllo manuale dal suo supporto e posizionare il Robomower nell'area del prato da
tagliare.
selezionare la velocità opposta premendo semplicemente il pulsante di velocità mentre il tagliaerba è
in corso di operazione. Posizionare il Robomower a una distanza minima di1.8
38
La velocità di guida manuale del Robomower ha due regolazioni, lento e veloce. Potete
i, animali domestici e
o di
ostacolare il percorso.
'indicato
domestici di montare sulla macchina
re di ricarica batterie lampeggia,
Capitolo 7,
Figura 3.0
Ma
nca segnale di cavo
altre persone. Non
Messaggi di testo e
à automatica,
2.4 m da qualsiasi

Edge
RoboScan
2
Mowing
RoboScan
2
Display di modalit
à automatica
Zone B: 1:40
Press GO
lunghezze del cavo perimetrale, con la parte anteriore del tagliaerba verso il cavo perimetrale. Figura
3.1.
Figura 3.1
Posizionare il Robomower
sul prato
3.7
Tosatura dei bordi
Important
(Riferirsi alla parte 6.2.4 Tempo di lavoro ) inserire il controllo manuale nel suo supporto e premere
la freccia di
Il primo lavoro per il Robomower è di tosare i bordi. Per bordo, intendiamo il perimetro esterno
dell'appezzamento attivo all'interno del quale opera il Robomower. Questo è essenzialmente dove
posizionate il cavo perimetrale nell'installazione del cavo. Tosare I bordi fornisce un taglio pulito e
uniforme intorno al perimetro e contribuisce a ridurre la quantità di guarnizione lungo i muri e altri
ostacoli. Il Robomower toserà sempre i bordi in senso orario. Figura 3.2. Il Robomower trover
automaticamente il bordo
e!
Quando tosate in zona di non-docking, è richiesto prima di delimitare la zona di non-dock
scorrimento inferiore per ricevere il display dell
Tosatura dei bordi
Non-Docking
(perimetro), lo toser
Fig
ura 3.2
Punto di
partenza
Parte anteriore
girata verso il cavo
à e poi tornerà nel prato per completare la tosatura
perimetrale
'appezzamento da tosare.
Punta di
partenza
1 m
Chapter
Chapter
Page 28
Page 28
à
.
3
3
Per cominciare la tosatura automatica, includendo la tosatura del bordo, il controllo manuale deve
essere prima riposto nel suo alloggiamento e inclinato. Quando il controllo manuale è in posizione, il
panello a Cristalli Liquidi visualizzerà un messaggio di testo
Figura 3.3.
Una volta il messaggio apparso, premere il pulsante verde GO per iniziare la sequenza di tosatura
manuale. Una sequenza di riscaldamento inizierà,
e quindi le lame inizieranno a ruotare. Il pannello a Cristalli Liquidi passerà al messaggio successivo
in
Figura 3.4. Una volta raggiunto il bordo, il Robomower si metterà a cavalcioni sul centro. Inizier
allora la tosatura dei bordi, completando uno o due passaggi intorno al perimetro. Nel momento in cui
il Robomower
prato.
Questo è semplicemente la tosatura metodica del prato utilizzando il sistema di direzione avanzato
del Robomower,
Figura 3.4
Figure 3.3
sar
à soddisfatto del perimetro tagliato, si fermerà e girerà verso l'interno dell'area del
Si sposterà allora all'interno del prato e inizierà quello che è chiamato il processo di scanning.
RoboScan®. Il display del pannello
Testo sulla tosatura dei bordi
l'indicatore di funzionamento inizierà a lampeggiare
indicando
Figura 3.5
che è in modo automatico
Testo in Scanning Tosatura
à
.
39

Press GO
Zone B: 1:40
Press GO
to Skip Edge
tosatura dei bordi.
3.8
Scanning (di tosatura)
Il processo di scanning
sistematicamente
sinistra alla destra. Durante questo processo, eseguirà anche altri giri e movimenti in modo da
andare avanti e dietro nel prato.
passaggi; in effetti lascier
assolutamente normale.
Robomower nel prato. Proprio come un lavastoviglie, aspettate l
apprezzare. Il Robomower continuer
default tempo
del tipo e della condizione dell
per maggiori informazioni sulla programmazione del tempo di lavoro
MAX , che
è semplicemente un processo secondo il quale il Robomower attraversa
il prato mentre
à dell'erba non tagliata tra le corsie che avrà fatte.
Queste aree non tagliate veranno tagliate nei passaggi successivi del
è generalmente da
tosa. Si sposta generalmente dalla destra alla sinistra e poi dalla
Ricordate che il Robomower non toserà tutta l'erba ai suo
Questo
a fine del lavoro per poterlo
à a funzionare per tutto il lasso di tempo selezionato o per
1.5 a 3 ore, a secondo del modello del Robomower,
'erba.
Vedere Capitolo 6, Impostazioni e Caratteristiche avanzate,
.
è
i primi
3.9 Saltare la tosatura dei bordi
Il Robomower fornisce un modo che permette di saltare il processo di tosatura dei bordi e d
cominciare direttamente con il processo di scanning. Per farlo, premere il pulsante GO due volte alla
partenza iniziale del tagliaerba. Premere Go due volte immediatamente dopo la prima pressione
indicherà al tagliaerba di saltare la tosatura dei bordi. Vedere Figura 3.6. Potere azionare il tagliaerba
dovunque all interno del perimetro che scegliete, ma a una distanza minima di 1m dal cavo perimetrale
più vicino.
Press GO again
Figura 3.6
Pronto
display in modalità automatica.
Per saltare la tosatura dei bordi,
premere GO una volta ancora,
Messaggio di testo dopo aver premuto GO
per cominiciare con il
Premere GO vi porterà al
prossimo schermo.
altrimenti inizi
erà c
on la
i
3.10
Tosatura completa Non-Docking
Quando il Robomower avrà operato il tempo programmato, si fermerà nel prato, aspettando voi per
essere riportato nel suo deposito e per essere ricaricato, in modo tale di essere pronto per la sessione
successiva. Come detto prima, ci sarà sempre batterie per riportare il tagliaerba al suo posto di
deposito e di ricarica. Vedere Capitolo 5, Ricarica. Il display del LCD visualizzerà un messaggio di
testo come visto in Figura 3.7 se il tempo di tosatura è impostato sulla regolazione di default MAX o il
messaggio visto in Figura 3.
Figura 3.7
40
8 se il tempo di tosatura è stato selezionato per un tempo diverso.
Recharge Battery
Messag
tosatura MAX
gio di testo dopo
Figura 3.8
tempo di tosatura preselezionato
Time Completed
Press GO
Messaggio di testo dopo

Se il Robomower ha completato la tosatura 20 minuti prima di essere ricollocato nel suo deposito, lo
schermo del LCD sarà bianco. Il Robomower si spegnerà da sé in un modo di pausa dopo 20 minuti
di inattività. Questa è una caratteristica di risparmio di energia. Premere il pulsante GO o togliere il
Controllo Manuale dal suo supporto sveglierà il Robomower e visualizzerà il messaggio presente sul
display del LCD prima
3.11
Guida e navigazione
Il Robomower è equipaggiato con un Controllo Manuale che vi permette di guidarlo con facilità dal
prato al posto di deposito quando non è in uso. Esso vi permette anche di azionare manualmente le
lame, e durante la guida, di tagliare piccole aree di erba.
Il controllo manuale può solamente funzionare in modalità manuale quando è rimosso dal suo supporto,
che lo tiene al suo posto durante il funzionamento
il funzionamento manuale sia impossibile quando esso sta nel suo supporto e il funzionamento automatico
è impossibile quando è rimosso dal suo supporto. Noterete anche che il controllo manuale contie
per cominciare il funzionamento automatico e anche per larresto di emergenza.
Per accedere al funzionamento manuale, rimuovere il controllo manuale come visto in Figura 3.9. Il
controllo è progettato per essere afferrato con le due mani mentr
lame sul lato sinistro e il pulsante di guida/navigazione sul quello destro. Una volta rimosso il controllo
guidare il Robomower da un posto allaltro è molto semplice. Usando il pollice o l indice della mano
premere leggermente il pulsante direzionale nella direzione desiderata. Il pulsante è omnipermettendo giri leggeri o acuti, fino a un cerchio completo. Bisogna
attivare i motori di guida usando il pulsante d
direzione desiderata. Una pressione continua è richiesta per guidare, nel momento in cui rilasciate la
pressione
il tagliaerba si fermerà
della pausa. In questo caso, luno o l altro messaggio in Figura 3.7 o 3.8.
automatico. Per sicurezza è progettato in modo tale che
ne il tasto
e funziona, con i pulsanti di controllo delle
direzionale,
. Figura 3.10.
irezionale,
esercitare
l uso è migliore se roteate leggermente il dito nella
una piccola pressione per
destra,
,
La guida manuale ha una velocità lenta e una veloce. Potete cambiare la velocità ad un altro livello a
qualunque momento premendo il pulsante di velocità. Un altra pressione e la velocità passerà al livello
opposto. Vedere Figura 3.10.
Figura 3.9
Pulsante di velocità
Pulsante direzionale, premere legermente nella direzione desiderata
Pulsante C
Pulsante MOW
Rimuovere il contro
(Tosare)
llo manuale dal suo supporto
Figura 3.10
Pannello del controllo manuale
41

AVVERTENZA!
Rischio di lesioni gravi. Indossare sempre delle scarpe robuste quando guidate il Robomower in
modalità manuale. Rispettare una distanza di sicurezza dal tagliaerba quando funziona manualmente.
Notare che la retromarcia parte dalla parte posteriore del tagliaerba. Guardare sempre indietro
quando usate la retromarcia. Non azionare il tagliaerba in aree non adatte per il funzionamento
manuale o sulle pendenze dove un equilibrio sicuro non è possibile. Tagliare le pendenze in modo
transversale. Non guidare il tagliaerb
di 3m di altre persone o animali domestici.
3.12 Tosatura manuale
Avete la possibilità di attivare manualmente le lame sul Robomower in modo di tagliare piccole aree.
Dopo che le lame siano attivate, potete manovrare il tagliaerba usando il pulsante di navigazione e
potete tagliare in qualunque direzione che il tastierino direzionale indicherà, inclusa la retromarcia.
L operazione di tosatura manuale sul controllo manuale è una OPC (Operator Presence Control) di
due digitazioni. Essa richiede due digitazioni separate e indipendenti per attivare le lame e una volta
attivate, rilasciare il pulsante arresterà le lame. In qualunque momento le lame si arresteranno, il
processo dellattivazione dellOPC sarà richiesto di nuovo. Durante loperazione di tosatura manuale,
l attivazione dei sensori dei paraurti arresteranno le lame. Figura 3.11.
a con persone sedute sopra e non operare manualmente a meno
Figura 3.11
Sequenza 1
Con il pollice destro, premere e tenere il pulsante C.
Sequenza 2
Mentre tenete il pulsante C , premere il pulsante MOW (Tosare) con il p
in azione.
Sequenza 3
Rilasciare il pulsante C. Mantenere la pressione sul pulsante MOW con il pollice sinistro. Dirigere e
manovrare il tagliaerba usando il pollice sinistro sul tastierino direzionale.
Tosatura manuale con il Controllo Manuale
ollice sinistro. Le lame entreranno
42

Manual
User Options
User Preferences
Press GO
M
anual Depart
Press GO
Robomower in Docking Station
and Manual Controller
in its holder
Docking options
Press GO
Press once the lower
scrolling arrow
GO
Scroll up or down until the
Docking options
is displayed
Time
:
_ _ _ _
:
_ _
Press GO
Press
Press
GO
M
T
W T F S S
Press GO
Scroll to the day
and Press
GO
Tuesday
00:00
Next digit
Scroll to set the clock
for the next digit
(Cis used to go back
)
Tuesday
11:30
Next digit
Press
GOto confirm
Weekly program
Press GO
Scroll down until the
Manual
User Options
User Preferences
Press GO
Manual Depart
Press GO
Robomower in Docking Station
and Manual Controll
er
in its holder
Docking options
Press GO
Press once the lower
Premere
GO
Scroll up or down until the
Docking options
i
Time
:
_ _ _ _
:
_ _
Press GO
GO
Press
GO
M
T W T F S S
Pre
ss GO
Scroll to the day
and Press
GO
Tuesday
00:00
Next digit
Scroll to set the clock
for the next digit
(Cis used to go back
)
Tuesday
11:30
Next digit
Press
GO
to confirm
Capitolo 4
Impostare il programma settimanale
4.1 Impostare il tempo
La prima tappa prima dell
giorno della settimana e orario. Notare che l
C
i sono due opzioni per impostare il tempo. Vedere figura 4.1.
'impostazione del programma settimanale è di impostare il
'orologio è una scala di tempo militare di 24 ore.
Robomower on the lawn
Robomower on the lawn
and Manual Controller
in Users
in Users
hands
hands
tempo
Time
corrente
is displayed
:
Il Robomower è nel Docking Station e il controllo manuale nel suo supporto - Premere una volta la freccia
inferiore di scorrimento - Il Robomower sul prato e il controllo manuale in mano all
'GO'
- Scorrere su e giù fino a visualizzare 'le opzioni del Docking' - Premere 'GO' - Scorrere giù fino a
visualizzare 'Tempo' l'
orologio e premere 'GO' per la digitazione successiva ('C' è usato per tornare indietro
confermare
and Press
and Press
Figure 4.1
Prem
ere 'GO' - Scorrere fino al giorno e premere 'GO' - Scorrere per impostare
Impostare il giorn
o e l'ora
'utilizzatore
) -
Premere
GO
GO
-
Premere
'GO' per
43

g
‘GO’
‘C’
‘GO’
‘
‘GO’
T
‘ ’
’
‘GO’
4.2 Impostare il programma settimanale
Rimuovere il controllo manuale e seguire le tappe come descritto sotto.
Scorrere su o giù
fino a visulizzare
le 'Opzioni del
Docking'
Premere 'GO'
Premere 'GO'
Premere 'GO'
Scorrere per
impostare il tempo
e premere 'GO' per
la digitazione
successiva ('C' è
usato per tornare
indietro)
Premere 'GO' per
confermare
Scorrere fino alla
modalità di
funzionamento e
premere 'GO' per
confermare ('Bordi
+Tosare'+'Tosare'
solo - 'Nessuno' per
cancellare giorno
attivo)
Scorrere fino al
giorno successivo che volete
impostare e premere 'GO'
Premere il pulsante ‘C’ a qualsiasi momento farà tornare il display allo schermo principale.
Figura 4.2 – Impostare il programma settimanale
M
Mode Edge + Mow
Mode Edge + Mow
M T W T F S S
M T W T F S S
Manual
User Options
User Preferences
Press GO
Docking options
Press GO
Weekly program
Press GO
Set program
Press GO
W T F S S
Press GO
Depart 00:00
Next di
Depart 12:30
Depart 12:30
Next digit
Next digit
Confirm
Confirm
Press GO
Press GO
it
Premere
Scroll up or down until the
Docking options’is displayed
Premere
Press
Scroll to the day you want
Press ‘GO
Scroll to set the time and Press
for the next digit (
Press ‘GO’ to confirm
Press ‘GO’ to confirm
Scroll to the operation mode
Scroll to the operation mode
and press ‘GO’ to confirm
and press ‘GO’ to confirm
(‘Edge + Mow’ or ‘Mow’ only –
(‘Edge + Mow’ or ‘Mow’ only –
‘None’ use to cancel active day)
‘None’ use to cancel active day)
Scroll to the next day you
Scroll to the next day you
want to set and Press ‘GO’
want to set and Press ‘GO’
is used to go back)
44

Set Time
AVVERTENZA
!
Figura
4.3
Display del programma settimanale
Important
Robomow
Nota
messaggio Set time
4.3 Come cancellare un
e! Per un taglio migliore, è consigliato impostare il programma settimanale in modo che il
er e l'innaffiatoio non funziona
: L
'orologio si regola da sé og
verrà visualizzato
giorno attivo
Due opzioni per cancellare un giorno attivo
1. Scegliere l
'opzione
ni volta che il gruppo batterie è rimosso per più di 30 secondi; il
Se la data e l
programmato per una partenza automatica non sarà corretto.
partenze incorretti possono essere pericolosi se bambini, animali
None (niente)
no mai insieme.
:
Press GO
'ora corrente non sono correttamente impostate, il tempo
domestici o alter persone sono presenti nell'area di tosatura.
?
:
sotto il menù programma settimanale nel
Rischio di lesioni gravi.
display
Tempi di
Modalità .
2. Cambiare il tempo di partenza a 00:00 nel programma settimanale
4.4 Display
Due opzioni per vedere il programma settimanale
1.
del programma settimanale
Prendere il controllo manuale dal supporto, s
visualizzare
4.3.
Weekly program
Weekly Program
Press GO
Press GO
Display Program
Press GO
M T W T F S S
+ - + - - - +
(Programma Settimanale) e continuare a seguire le tappe in Figura
S
et Program
:
eguire le istruzioni spiegate in Figura 4.2 fino a
.
Premere
GO
Scorrere fino allo schermo
successivo Display Program
Premere
GO
Questo schermo sarà visualizzato
per 10 secon
(+
di
e poi
scomparirà
significa giono attivo
)
.
45

T W T F S S
M
2. Il Robomower
è visualizzato per
Premere di nuovo il pulsante GO entro 10 secondi è una scorciatoia per il display
dell'impostazione del programma settimanale.
Note:
Il display del programma settimanale è utilizzato per visualizzare informazioni supplementari
sulle operazioni della settimana precedente tranne che per il +
seguenti possono apparire sotto ognuno dei giorni attivi
è nel
Docking Station - premere una volta la freccia supe
10 secondi
M T W T F S S
Caratter
+
B
b
D
U
C
:
+ - + - - - +
Press GO
e
Giorno attivo
Saltato do
(
Il Robomow
programmato causa tensione
Tornato al Dock prima del
(
Il Robomow
Station
Working time
Saltato perch
c'era tensione
collocato fuori dal
programmata.
Saltato dovuto alla scelta dell
sceglie l'opzione
l' Auto depart su off )
Saltato perch
progr
sta nel
causa tensione
ammate, anche se c'era tensione. (
Docking Station, ma il controllo manuale non
vuto a tensione di batteria bassa
er non
er non ha completato l
(Tempo di Lavoro)
é non c'erano contatti con il
di ricarica (interru
é non c'era ricarica al momento delle partenze
Questo schermo sar
per 10 secondi e poi sco
è partito dal
tempo causa tensione
di batteria basso
Docking Station)
skip next depart
riore
(+
significa giorno attivo
:
Significato
Docking Station
di batteria basso
'oper
azione ed è tornato al
è impostato
Docking Station o perch
zione dell
al momento della partenza
'utilizzatore (ad esempio
(saltare prossima partenza) o
di solito quando il
il programma settimanale
à visualizzato
mparir
per
i giorni attivi. I caratteri
al mom
)
di batteria basso
relativo solamente quando
)
'alimentazione o tosa
à
)
ento
Docking
é non
erba
se l
'utilizzatore
imposta
Robomow
è al suo posto).
er
46

Tempo corrente
Capitolo 5
Ricarica
5.1
Procedura di Ricarica
Di tutte le opzioni del Robomower, quella della ricarica del gruppo batterie è la seconda in ordine
d importanza dopo la sicurezza. La mancanta osservanza delle istruzioni seguenti ridurrà la durata del
gruppo batterie. Dopo il completamento di qualunque sessione di taglio, è molto importante riportare il
Robomower nel suo deposito e procedere alla ricarica appena possibile, preferibilemente entro 6 ore dalla
fine del lavoro.
Il caricabatteria standard, Figura 4.1 è un alimentazione elettrica, di cui l emissione di tensione è DC e la
circolazione della corrente del gruppo batterie per la ricarica è regolata allinterno del tagliaerba. Il sistema
di ricarica e il gruppo batterie possono rimanere inseriti nella presa elettr
in uso senza rischio di danni. In effetti, è il modo migliore per mantenere il gruppo batterie, metterlo
sempre sotto ricarica quando non è in uso. Il caricabatteria standard (alimentazione elettrica) ricaricherà il
gruppo
batterie dal livello Recharge Battery (Ricaricare Batteria) in 20 oro circa, a secondo delle
condizioni. C è un caricabatteria veloce disponibile come accessorio. Vedere gli accessori disponibili per il
Robomower in Capitolo 10.
ica ininterrotamente quando non è
5
.2
Ricaricare nel
Il Docking Station è utilizzato come luogo principale di ricarica quando il docking è consentito. Quando il
tagliaerba sta Docking Station il gruppo batterie è sotto ricarica e uno degli schermi seguenti è
visualizzato
Display LCD sul Robomower quando
:
Docking Station
Prossima partenza
programmata
11:28
MO
10:30
E
Pres
s GO
Figura
sta
nel dock e che il Programma Settimanale
5.1
Manual Depart
Press GO
( E vale per Edge (Bordo) + Tosatura
dell
'area interna
Icona della batteria
Modalit
dell'area interna solamente)
à di funzionamento
e M vale per Tosare
è impostato
Figura 5.2
Display LCD sul Robomower quando sta nel dock e
impostato O la funzione dell'Auto Depart (
partenza automatica) è spenta
NESSUN
Programma Settimanale
47
è

Figura 5.3
Display LCD Display quando scollegato dal caricabatteria standard
5
.3
Ricaricare con il caricabatteria
Se si presenta la necessità, il gruppo batterie può essere ricaricato con il caricabatteria standard
collegandolo alla presa di ricarica sul supporto del controllo manuale. Questo è progettato SOLAMENTE
per uso in interni e non deve essere mai essere utilizzato mentre il Robomower sta ancora nel
Station.
Quando la spina di ricarica è collegata dal supporto del controllo manuale, il messaggio seguente sarà
visualizzato sullo schermo LCD. Vedere Figura 5.3. Premere qualunque pulsante sul controllo manuale e
lo schermo
LCD.
principale
, 'Manual
standard collegato alla presa di ricarica
User Options (Manuale
Keep Charging
If Not Used
Opzioni dell'utilizzatore) sarà visualizzato sul
Docking
Collegare
caricabatteria, Figura
e il processo di ricarica inizierà. Inclinare leggermente il controllo manuale, permettendogli di appoggiare
un pò sul filo di ricarica. Non tentare di forzare il controllo manuale quando cercate di allinearlo. Il
caricabatteria è destinato solo per uso in interni. Non caric
il caricabatteria a una presa ad uso domestico, 230 Volt. AC e la spina di testa del
5.5,
AVVERTENZA
nella presa di ricarica,
!
Scosse elettriche. Rischio di lesioni o di rimanare fulminato. Il
c
aricabatteria standard del Robomower
uso in interni. Non utilizzare il caricabatteria o
Robomower in aree di estrema umidità. Non utilizzare un
caricabatteria quando le teste sono danneggiate. Utilizzare solo il
c
aricabatteria raccomandato con il vostro Robomower.
situata
sotto il supporto del controllo manuale, Figura
Spina del
caricabatteria
are il Robomower in ambiente umido.
è progettato solamente per
ricaricare il
5.6,
Caricabatteria standard
(alimentazione elettrica) 230 volt.
Figura 5.4
Lo schermo LCD del controllo manuale visualizzerà il testo visto in Figura 4.4 e l icona della batteria si
sposterà di continuo da vuoto a pieno per indicare la ricarica. Una volta la batteria ricaricata, il messaggio
cambierà come visto in Figura 4.5, ricordandovi di tenerla collegata al caricabatteria fino al prossimo uso.
48
Figura 5.5
Presa di collegamento del
caricabatteria standard
Figura 5.6

Icona Batteria
Ricaricare è un aspetto importante per assicurare il buon funzionamento e la durata del gruppo batterie, un
indicatore particolare e un sistema di direzione dell alimentazione sono incorporati nel taglierba per
ricordarvi e avvisarvi quando il processo di ricarica è necessario.
Charging
Ready
Keep Charging
Figura 5.7
Figura 5.8
L importanza di una ricarica accurata e la cura del gruppo
batterie non deve essere trascurata. Non seguire la procedura
di ricarica causerà un funzionamento scarso e ridurrà la durata
del gruppo batterie.
5
.4
Gestione dell alimentazione e segnali di ricarica
Il Robomower è equipaggiato con una sofisticata gestione dell alimentazione e un sistema di allarme che
funziona a due livelli; 1. Usare l alimentazione fornita dal gruppo batterie è il modo più efficiente durante il
funzionamento e il non-funzionamento e 2. Per ricordarvi e avvisarvi quando il sistema di ricarica non è
usato correttamente per tenere il gruppo batterie in buone condizioni per un ottimo funzionamento. Il livello
uno è un livello relativamente transparente per l utilizzatore, ma in certe condizioni comunicherà
informazioni al
ricarica necessita la vostra attenzione. E il sistema di livello due che comunica con voi attraverso audio e
messaggi del LCD.
Il primo presupposto del sistema è che il Robomower sarà collegato al caricabatteria ininterrottamente
quando il gruppo batterie è inserito nel tagliaerba, tranne che quando è in operazione. Questa ipotesi è
fatta perché questo è l unico modo per assicurare che il gruppo batterie fornirà sempre un funzionamento
soddisfacente durante l operazione. Da questo presupposto, i segnali del sistema avviserà l utilizzatore a
diversi livelli e frequenze quando questo non avviene. In più, il sistema può anche avvisare l utilizzatore
quando qualcosa ha interrotto l operazione di ricarica, come una perdita di energia del caricabatteria ad
esempio.
Il gruppo batterie deve essere completamente ricaricato prima di iniziare qualunque operazione. In più,
dovete esaminare il tagliaerba prima del funzionamento in caso di eventuali problemi che protrebbero
causare una consumazione eccessiva di energia e ridurre il tempo ottimale di lavoro. Esempi: le lame
smussate o l accumulazione di erba intorno alle lame. Altri esempi sono presenti nel Capitolo 7
Risoluzion
prima di iniziare il lavoro. Solo quando il display del LCD visualizza il messaggio in Figura 5.8 il
Robomower è completamente ricaricato e pronto per tosare. Infine, usare il Robomower per il lavoro al
quale è destinato, tagliando normali livelli di crescità dellerba.
livello due in modo da segnalarvi che qualcosa che riguarda il gruppo batterie e il sistema di
e dei problemi. In primo luogo, accertarsi che il gruppo batterie sia completamente ricaricato
,
Il Robomower può funzionare in due diversi tempi di lavoro.; 1. operare il tempo massimo permesso dal
sistemo, quando questo tempo è dettato esclusivamente dal livello di energia rimanente nel gruppo
batterie e 2. Quando il tempo di lavoro è impostato per operare durante un arco di tempo definito
dall utilizzatore, come un ora ad esempio. L operazione massima visualizzerà sempre sul display
Recharge Battery (Ricaricare Batteria) dopo la sessione di taglio e un tempo definito visualizzerà Time
Complete (Tempo completato) dopo la sessione. In questi due scenari di operazione è importante
ricuperare il Robomower e ricaricarlo appena possibile, preferibilmente entro 6 ore dalla fine
dell operazione.
49

Il livello di Recharge Battery a una maggiore priorità nel sistema di gestione dell alimentazione rispetto a
Time Completed per lovvia ragione che la tensione del gruppo batterie è a un livello più basso. Per
questo motivo, immediatamente dopo un messaggio Recharge Battery il Robomower emettrà un segnale
acustico ogni 30 secondi per 20 minuti per avvisarvi che la sessione di tosatura è completata e che è
tempo di ricollegare il caricabatteria al Robomower. Se il Robomower non è collegato al caricabatteria
entro le successive 21 ore, si sentirà unallarme di più alto livello. Se il Robomower non è collegato dopo
questa seria di allarme, il tagliaerba entrerà in un modo di pausa per rispamiare energia. Se il Robomow
entra in un modo di pausa, il gruppo batterie deve esssere rimosso per 10 secondi e poi reinserito in modo
da svegliare il Robomower. Tuttavia, se il taglierba raggiunge questo livello e il caricabatteria non è presto
collegato, rischiat
Allarme simili vi avviserà di collegare il caricabatteria se non è collegato dopo un certo tempo, quando
opera in sessioni di tempi di lavoro impostate. Infine, se il caricabatteria non è collegato, anche dopo il
messaggio di ricarica, il sistema di allarma vi ricorderà di tenere il caricabatteria collegato finché non sia
pronto per l uso.
5.5
Conservazione invernale
e di provocare un funzionamento scarso e di ridurre la durata del gruppo batterie.
Quando si ripone il Robomower per la conservazione invernale, caricare completamente il gruppo batterie
e poi conservarlo fuori dal Robomower in ambiente asciutto dove le temperature non scendono sotto i
20°C. Ripetere la procedura di ricarica ogni tre mesi.
Important
e!
Per maggiori informazioni sulla conse
rvazione invernale riferirsi alla parte 9.8.
50

Figura
6.2
Capitolo 6
Impostazione dell Operatore e
Caratteristiche avanzate
6.1 Opzioni dell utilizzatore
Sollevare il pannello di controllo dal proprio supporto, il testo sul display LCD cambierà in menù manuale
funzionamento, come visto in F
Premere GO una volta vi porterà al prossimo schermo, User Preferences
Usare le frecce Su
Gi
igura 6
F
igura
ù
vi permetterà di scorrere le opzioni del
6.1
.1.
Manual
User options
User Preferences
User Preferences
User Preferences
Press GO
Press GO
Press GO
Information
Information
Information
Press GO
Press GO
Press GO
Docking options
Docking options
Docking options
Press GO
Press GO
Press GO
Child Guard
Child Guard
Child Guard
Press GO
Press GO
Press GO
. Figura 6
menù, come visto in Figura 6
.2.
.2.
di
Safety Tests
Safety Tests
Safety Tests
Press GO
Press GO
Press GO
(Non disponibile dall'utilizzatore
Password richiesta
Il pulsante GO è usato per selezionare o confermare diverse opzioni e impostazioni del menù. Premendo
il pulsante GO , selezionerà o confermerà quello che appare alla seconda linea del messaggio di testo del
LCD. Ci sono diverse impostazioni per le quale l operatore può effettuare cambiamenti tramite le
caratteristiche con permettere/non permettere. Premere il pulsante C a qualsiasi momento durante il
processo di selezione del menù vi riporterà al menù principale. Le opzioni seguenti del menù sono
disponibili e possono essere cambiate a secondo dei desideri; (non tutte le opzioni sono disponibili su tutti
il modelli).
)
(Not accessible to user
Service
Service
Service
Press GO
Press GO
Press GO
(Not accessible to user
Password required)
Password required)
51

6.2 Preferenze dell utilizzatore
Premere GO per visualizzare il menù delle preferenze dell utilizzatore, cominciando con Sound
(Suoneria)
Premere GO vi porterà a que
, Figura 6.3. Usare le frecce
ste diverse preferenze. Figura 6
User Preferences
User Preferences
User Preferences
Press GO
Press GO
Press GO
Su
GIù vi permetterà di scorrere queste opzioni del menù.
.3.
Sound on
Press
Press
Press
GO
GO
GO
Sound on
Press GO
Press GO
Wire Position
Wire Position
Press GO
Press GO
Premere GO
Language
Language
Press GO
Press GO
Work time
Work time
Press GO
Press GO
Wide scan off
Wide scan off
Press GO
Press GO
Learn edge
Learn edge
Press GO
Press GO
Set default edge
Set default edge
Press GO
Press GO
Rain sensor
Rain sensor
Blades replaced
Blades replaced
Press GO
Press GO
Press GO
Press GO
Anti theft
Anti theft
Press GO
Press GO
Figura
Opzioni delle preferenze
dell'utilizzatore
6
.2.1 Suoni
Permette all utilizzatore di bloccare in caso di pericolo con relative suonerie di funzionamento.
6
.2.2 Posizione del cavo
Permette all utilizzatore di esaminare la posizione del cavo in modo Edge (Bordo) mentre i motori sono
spenti per impedire danni al cavo perimetrale dopo che linstallazione iniziale del cavo sia completata.
6
.2.3 Lingua
Permette all utilizzatore di visualizzare sul pannello a cristalli liquidi il testo in diverse lingue.
52
6.3

Dock Zone: MAX
Dock Zone: 2:00
Premere
GO
Figura
6.4
Premere
GO
6
.2.4 P
rogrammazione del tempo di lavoro
Questa opzione permette all utilizzatore di impostare il tempo di funzionamento da una massima
regolazione di default ad una regolazione da 20 minuti fino a 2 ore (1:20 in RL350). Figura 5.4. Questa
opzione è disponibile per 4 diverse zone: A, B, C, D. Avendo 4 diverse zone permette di programmare a
seconda dellestensione della zona: aree diverse possono necessitare di tempi diversi di rasatura.
Scorrere per selezionare
z
Press GO
Scorrere per selezionare tempi di
Press GO
6.2.5 Analisi dell estensione
Il comando di Analisi dell estensione munisce il Robomower di una navigazione tecnica secondaria che
può portare ulteriori benefici in casi di prati particolari. Permette di ampliare l angolo di operazione della
macchina, è possibile aumentare la distanza tra i raggi d azione, è consigliato ricorrere a questa funzione
quando si ha la sensazione che il Robomower stia procedendo sempre sulle stesse diagonali avanti e
indietro.
6
Questa opzione di menù è usata solo in zona di nonpercorso è approssimativamente di 1.5 a 2 giri intorno al perimetro. Questa caratteristica permette
all utilizzatore di imparare una distanza specifica in ogni zona di lavoro per tagliare una distanza specifica,
come un giro pieno. Rimarrà a una distanza imparata finché non impari un altro percorso o si selezioni il
percorso di default. Può essere fatto quando il pannello di controllo manuale è incassato nel supporto
allineato alla superficie del tagliaerba. Learn Edge' (Imparare il percorso) vi permette di insegnare al
Robomower la distanza del
.2.6 Learn Edge - Imparare il percorso
percorso. Figura 6
dock.
La distanza di default per la tosatura del
.5.
lavoro differenti.
Regolazione di tempo da: 20
minuti a 2 ore fino a MAX
one diverse
Posizionare il Robomower su Inizio e mettere il pannello di controllo nel supporto
Seguire i passi descritti nella figura 6.5 per cominciare il processo
Imparare il percorso è specifico per ogni zona, così potrete essere sicuri di aver selezionato la zona
corretta che volete tagliare
Zone B: MAX
User Preferences
Learn Zone B
Press GO to Learn
Learning Edge
Press GO to Learn
Press GO
User options
Press GO
Press GO
Learn edge
Press GO
Usare le frecceSu
al display delle
Premere GO
Premere Go e scorrere fino a
Imparare il percorso
Scorrere su o giù cambierà la zona, se un
tempo è impostato per questa zona.
o Giù
'Opzioni
dell'utilizzatore
per scorrere fino
Learning Edge
STOP to Set
Figura
6.5
Guidare intorno al perimetro. Seguire il
tagliaerba e premere il pulsante
quando la distanza desiderata è
raggiunta.
Stop
53

6
.2.7 Impostazione di default del Bordo
Selezionare 'Default Edge' (Default del Bordo) ri
specifico selezionato.
6.2.8
Dock
consentito
Questa opzione deve essere impostata su on quando viene utilizzato il Docking Station
consentire all'utilizzatore l'accesso alle opzioni del Docking.
Docking sono nascoste
6
.2.8 Sostituire le lame.
Scegliere questa opzione per sostituire le lame in modo da riavviare il contatore del promemoria. Un
promemoria per sostituire la lame sarà visualizzato sul display dopo le successive 200 ore di
funzionamento. Le lame sono facile da sostituire, riferirsi alla parte 9.2.
6
.2.10 Anti-furto
Il sistema anti-furto fornisce all utilizzatore una funzione che impedisce a altre persone di usare il
Robomower a meno
sarà il vostro codice di sicurezza personale. Usare le frecce di scorrimento per scegliere una cifra del
codice e poi premere GO per selezione la cifra successiva selezionata. Troverete un posto per registrare
il vostro codice personale nel Capitolo 8 di questo manuale. Accertarsi di registrarlo.
Per cambiare la password, scegliere l opzione Change password (Cambiare password) sotto il menù Anti
furto (vedere figu
.
di conoscere il codice valido per entrare. Scegliete e immetete un codice di 4 tasti che
ra 6.6
). Dovrete inserire la vecchia password prima di digitarne unaltra.
stabilisce la distanza di default del bordo all'appezzamento
per
Se
è impost
ata
su off le opzioni del
Anti theft
Anti theft
Press GO
Press GO
Press GO
Press GO
Anti theft off
Anti theft off
Press GO
Press GO
Change password
Change password
Press GO
Press GO
Figura
6.6
54

6
.3 Informazione
Premere GO sul display Information aprirà l opzione per scorrere tra i seguenti menù (figura 6.7):
Total time
Total time
Press GO
Press GO
Bat. run time
Bat. run time
Press GO
Press GO
Battery voltage
Battery voltage
Press GO
Press GO
Temperature
Temperature
Press GO
Press GO
Indicates the total number of hours
Indicates the total number of hours
the mower has been in operation
the mower has been in operation
Indicates the last battery run time
Indicates the last battery run time
(till
Recharge battery
(till
Recharge battery
Displays the current voltage of the
Displays the current voltage of the
Power Pack.
Power Pack.
Displays the temperature inside
Displays the temperature inside
the Robomower
the Robomower
is displayed)
is displayed)
Main Board
Main Board
Press GO
Press GO
Software version
Software version
Press GO
Press GO
Charging voltage
Charging voltage
Press GO
Press GO
Charging temp.
Charging temp.
Press GO
Press GO
Last stop cause
Last stop cause
Press GO
Press GO
Figura
informazione
Indica il numero totale di ore di funzionamento del Robomower
6.7
Menù di
Displays the part number of the
Displays the part number of the
Main Board
Main Board
Displays the software version
Displays the software version
operating in this mower
operating in this mower
Displays the charging voltage
Displays the charging voltage
Displays the charging temperature
Displays the charging temperature
(measured on the Main Board)
(measured on the Main Board)
Displays the last stop cause number
Displays the last stop cause number
Indica il tempo rimanente delle batterie (fino a quando è visualizzato Recharge Battery (Ricarica
Batt.))
Indica la tensione del gruppo battierie
Indica la temperatura al
Indica il numero di parti del Menù principale
Indica la versione software del tagliaerba
Indica la tensione di ricarica
Indica la temperatura di ricarica (misurata nel menù principale)
Indica il numero della causa dell ultimo a
l interno del Robomower
rresto
55

Weekly program
Press GO
Time
:
Mo 10:35
Press GO
Press
GO
Docking options
Press GO
Entry points
Press GO
Auto depart on
Press GO
Skip next depart on
Press GO
Weekly program
Press GO
Time
:
Mo 10:35
Press GO
Press
Docking options
Press GO
Entry points
Press GO
Auto depart on
Press GO
Skip next depart on
Press GO
Opzioni del Docking
6.4
Opzioni del Docking (solo per Docking Station
Premere GO sul display delle Docking options
tra i menù
seguenti
:
)
(opzioni del Docking)
aprirà le opzioni da scorrere
Premere GO
Per maggiori informazioni sul
program
6.4.1
Entry points
I punti d
dentro il prato per tosare l'area interna. In modo da garantire meglio la copertura dell'area da tosare, il
tagliaerba ha per default tre punti d'ingresso differenti. L'opzione Entry points
altri punti d'ingresso diversi da quelli predefinit
Figura
,
vedere capitolo 4.1 e 4.2.
,
Punti d
'ingresso
Entry points
6.8
'ingresso
tempo Time
sono definiti come punti, nei quali il tagliaerba lascia il Bordo e torna
e sulle impostazioni del programma settimanale
i.
consente d
'impostare
Weekly
Sul display
Premere GO
Impostare I Punti d'Ingresso
E' poss
punto d'ingresso
Collocare il tagliaerba nel Docking Station quando il controllo manuale è nel suo supporto e seguire le
tappe indicate qua sotto
56
Entry points
Entry Points
Press GO
ibile
impostare quattro punti (incluso il Docking Station stesso, che
uno e non può essere cancellato).
potete trovare le tre opzioni seguenti (figura
Set entry points
Pres GO to learn
Back to default
Press GO
Entry points on
Press GO
Figura
(Figura
6.10)
Press
Press
in modo d
GO
GO
'impostare i Punti d'Ingresso
6.9):
6.9
è sempre definito come
:

One of the following displays is appeared
One of the following displays is appeared
when the mower is in the Docking Station
when the mower is in the Docking Station
11:28 Mo10:30E
11:28 Mo10:30E
11:28 Mo10:30E
11:28 Mo10:30E
11:28 Mo10:30E
11:28 Mo10:30E
11:28 Mo10:30E
Press GO
Press GO
Press GO
Press GO
Press GO
Press GO
Press GO
Docking options
Docking options
Weekly program
Weekly program
Docking options
Docking options
Docking options
Docking options
Docking options
Press GO
Press GO
Press GO
Press GO
Press GO
Press GO
Press GO
Time: Mo 11:55
Time: Mo 11:55
Press GO
Press GO
Press GO
Press GO
Entry Points
Entry Points
Entry Points
Entry Points
Press GO
Press GO
Press GO
Press GO
Manual Depart
Manual Depart
Press the down
Press the down
Press the down
Manual Depart
Manual Depart
Press GO
Press GO
Press GO
Press GO
Press
Press
Press
Press
Press
Press
Press
Scroll until
Scroll until
Scroll until
Scroll until
is displayed
is displayed
is displayed
is displayed
Press
Press
Press
Press
Press the down
Scroll arrow
GO
GO
GO
GO
GO
GO
GO
Entry Points
Entry Points
Entry Points
Entry Points
GO
GO
GO
GO
Scroll arrow
Scroll arrow
Scroll arrow
Set Entry Points
Set Entry Points
Set Entry Points
Set Entry Points
Pres GO to learn
Pres GO to learn
Pres GO to learn
Pres GO to learn
Entry 1: Docking
Entry 1: Docking
Entry 1: Docking
Entry 1: Docking
Pres GO for next
Pres GO for next
Pres GO for next
Pres GO for next
Entry 2 of 4
Entry 2 of 4
Entry 2 of 4
Entry 2 of 4
Pres GO to set
Pres GO to set
Pres GO to set
Pres GO to set
Entry 3 of 4
Entry 3 of 4
Entry 3 of 4
Entry 3 of 4
Pres GO to set
Pres GO to set
Pres GO to set
Pres GO to set
Figura
Impostare I punti
d'
Uno dei displays seguenti è visualizzato quando il tosaerba è nel Docking Station - Premere la freccia di
scorrimento inferiore - Premere 'GO' - Scorrere fino a visualizzare 'Punti d'Ingresso' - Premere 'GO'
Premere 'GO' - Premere 'GO'
'GO' al punto che volete impostare - Premere 'GO' per altri punti o lasciare il tosaerba completare il bordo
Il tosaer
ba i
6.10
ingresso
nizierà a seguire il perimetro - Seguire il tosaerba e premere
Press
GO
Press
GO
Press
GO
Press
GO
Press
GO
-
Press
Press
Press
start to follow the perimeter
start to follow the perimeter
start to follow the perimeter
start to follow the perimeter
Follow the mower and
Follow the mower and
Follow the mower and
Follow the mower and
Press
Press
Press
Press
you want to set
you want to set
you want to set
you want to set
Press
GO
Press
GO
Press
GO
Press
GO
or leave the mower to
or leave the mower to
or leave the mower to
or leave the mower to
complete the edge
complete the edge
complete the edge
complete the edge
Mower will
GO
-
Mower will
GO
-
Mower will
GO
-
Mower will
GO
at the point
GO
at the point
GO
at the point
GO
at the point
for other points
for other points
for other points
for other points
-
Ritorno a
Selezionare
distanza nella memoria e il tagliaerba dovrà completare la tosatura del prato al meno una volta prima
di utilizzare il default delle percentuali di
Per impostare ques
Punti d
Permette all
tagliaerba inizierà sempre la tosatura dell'area interna dal
Per impostare questa opzione seguire le tappe descritte in figure
default
'Ingresso - on/off
Back to default
ta opzione seguire le tappe descritte in figure 6.10.
'utilizzatore
(Ritorno a default) ristabilisce i punti d'ingresso di default
30% e 60%
di utilizzare I punti d'ingresso . Quando
del perimetro come punti d
Docking
Entry points
Station.
6.10.
'ingresso.
è impostato su
non c
'è
off
il
57

Skip next on
6.4.2 Auto Depart - Partenza automatica
Permette all
su
off
6.4.3
Saltar
Permette all'utilizzatore di saltare l'operazione successiva programmata. There are two options to
activate this option:
1. Scorciatoia
visualizzare questo
'utilizzatore di interrompere il programma settimanale quando
.
e la partenza successiva
quan
do il tagliaerba sta sul Docking Station premere prima il tasto
:
Auto depart
è impostato
C
per
Figura
Quindi premere
2.
Sotto il menù
la prossima partenza
Dopo aver impostato l
partenza successiva dopo quella che è stata saltata.
6.5 Protezione per bambini
La protezione per bambini è una caratteristica che quando è attivata impedisce ai bambini e ad altre
persone
ma è un codice molto semplice intento ad impedire l
sequenza di tasti per disattivare la protezione per il funzionamento è la stessa per tutti i taglierba, premere
la freccia
6.6
Quando è selezionato, la caratteristica del test di sicurezza vi permetterà di provare i primi dispositivi di
sicurezza sul Robomower; 1. Paraurti fronte e retro, 2. Sensore di sollevamento e 3. I pulsanti del controllo
manuale. Seguire i suggerimenti sui menù per provare. Non usare mai il Robomower con un dispositivo o
una
sistema di sicurezza. Vedere un fornitore di servizio autorizzato da Friendly Robotics per una riparazione o
per informazioni su qualsiasi sistema o d
non autorizzate di usare il Robomower. Impedisce il funzionamento senza il codice appropriato,
Up
e poi il tasto
Test di sicurezza
caratteristica di sicurezza non operativi. Non provare a disattivare o a evitare qualunque dispositivo o
Opzioni del Docking
6.11
GO
per confermare il salto.
) e premere
'opzione
C
per disattivare i controlli. Un minuti di inattività riattiverà i tasti.
Skip
ispositivo di sicurezza.
Confirm
scorrere fino all
GO
per impostare l
next depart
uso del tagliaerba a persone non autorizzate. La
'opzione
su
Skip next depart
'opzione
on
il tagliaerba visualizzerà il tempo della
(vedere parte
(
6.4).
Saltare
58

Capitolo 7
Risoluzioni dei problemi
7.1 Messaggi
Il Robomower è equipaggiato con un sofisticato sistema di controllo che vi informerà tramite
messaggio sul pannello del LCD quando si verificherà un’errore di funzionamento comune. In
più, comunicherà anche tramite testi diversi messaggi per avvisare l’utilizzatore di eseguire
certe funzioni o azioni. Se lo schermo del LCD è bianco, premere una volta il pulsante ‘GO’
attiverà il tagliaerba e l’ultimo messaggio presente sul display prima dell’arresto sarà
visualizzato.
E’ impossibile elencare ogni circonstanza che risulta in un messaggio sul dispay, le ragioni
più comune per un messaggio particolare sono fornite nella tabella qui sotto. Seguendo
questa tabella, nella parte 6.2, troverete altri problemi di funzionamento che possono non
comparire in un messaggio di testo sul pannello del LCD. Per problemi che non possono
essere risolti tramite queste tabelle, contattare il vostro fornitore di servizio.
Messaggio sul
display
Percorso ostacolato
Taratura richiesta
Mancata ricarica
Controlla altezza di
taglio
Controllo
dell'interruttore
perimetrale
Controllo
dell'alimentazione
Causa probabile/Eventualità
- Pressione sul paraurti durante il
riscaldamento.
- Pressione sul paraurti per >2 sec durante la
tosatura manuale.
- Pressione sul paraurti durante la partenza dal
Docking Station
- Pressione sul paraurti quando il tagliaerba
gira nel prato per tosare l'interno dell'area.
- Visualizzato sul display solamente al primo
uso
- Il processo di ricarica non è attivo
- I motori di tosatura sono stati in sovratensione
per troppo tempo o alcuni ostacoli sono
presenti intorno alle lame.
- Qualcosa impedisce a una lama di
girare liberamente. Una
accumulazione importante di erba
sotto l'area di taglio, corde o
oggetti simili avvolti alle lame.
- Un oggetto incastrato sotto il tagliaerba
impedisce le lame di girare.
- Il tagliaerba cerca di partire dal Docking
Station e l'interruttore perimetrale non
risponde
- C'è uno scollegamento del cavo perimetrale
scoperto al momento della partenza
- L'alimentazione/caricabatterie non è collegato
correttamente nell'alimentazione principale.
- La spina del caricabatterie non è
completamente inserita nella presa di ricarica
del tosaerba.
- Il processo di ricarica è stato arrestato causa
una temporanea perdità di energia.
Nessuna alimentazione elettrica al ricettacolo
o alimentazione principale spenta.
dell'utilizzatore/correttiva
- Spostare il tagliaerba dall'ostacolo
che preme sul paraurti.
Allontanare manualmente il
tagliaerba dall'ostacolo.
- Seguire I suggerimenti sul LCD per
tarare il tagliaerba.
- Contattare il vostro fornitore di
servizio
AVVERTENZA
batterie prima di sollevare il
tagliaerba.
- Ispezionare le lame per eventuali
materiali o detriti che impediscono
alle lame di girare.
- Rimuovere l'erba tagliata
accumulata mediante un bastone
di legno.
- Accendere l'interruttore
perimetrale e controllare l'avviso
del cavo rotto.
- Scollegare la spina di ricarica dal
tagliaerba, controllare che
l'alimentazione sia collegata
all'alimentazione principale e
ricollegare la spina al tagliaerba
per ricominiciare la ricarica.
- Accendere l'alimentazione del
ricettacolo principale.
Azione
– Togliere il gruppo
59

Messaggio sul
display
Problema di Docking
Guida in
sovraccarica
In raffreddamento,
in attesa…
Causa probabile/Eventualità
- I contatti del tagliaerba non toccano I
contatti del Docking Station.
- I contatti del tagliaerba o del Docking
Station sono sporchi.
- La ricarica non è percepita, anche se
c'è un contatto fisico tra il tagliaerba e i
contatti del Docking Station (il
tagliaerba è trovato all'ingresso del
Docking Station).
- Il tagliaerba non raggiunge il Docking
Station entro il tempo e la distanza
predefiniti.
- I motori di guida hanno operato sotto
una importante carica per troppo
tempo.
Azione
dell'utilizzatore/correttiva
- Accertarsi che il tagliaerba e le
ruote motrici siano allo stesso
livello della base del Docking
Station (se necessario riempire
di terra l'area sotto le ruote
motrici)
- Pulire I contatti con una
spazzola o un panno umido
- Accendere l'interruttore
perimetrale
- Controllare il buon
collegamento dei cavi ai
contatti del Docking Station.
- Controllare il fusibile di ricarica
5A (togliere la protezione di
plastica sotto il controllo
manuale).
- Controllare che il taglierba
opera in zona di docking.
- Controllare che il tagliaerba
non scivola o non si blocca
andando verso il Docking
Station.
- Aspettare fino a che il
messaggio ‘Drive overload –
Press GO’ sia visualizzato sul
display.
Problema di guida - Mancanza interna - Contattare il fornitore di servizio
- Inserire il codice corretto di 4
cifre ‘Theft Guard’ può essere
Codice d'ingresso - Il sistema di Anti-Furto è attivo
Scollegamento dei
paraurti
anteriore/posteriore
AVVERTENZA –
NON TENTARE di
mettere fuori servizio
questo dispositivo di
sicurezza nel caso in
cui non potete
individuare e
risolvere il problema.
Contattare il fornitore
di servizio per
riparare prima
dell'uso.
- Mancanza interna dei paraurti - Contattare il fornitore di servizio
disattivato sotto ‘User
Preferences’. Contattare il
vostro fornitore di servizio per
assistenza nel caso di perdità
del codice.
60

Messaggio sul
display
Pressione sui
paraurti anteriore/
posteriore
AVVERTENZA–
NON TENTARE di
disattivare questo
dispositivo nel caso
in cui non siete
capaci di individuare
e di risolvere il
problema. Contattare
il vostro fornitore di
servizio per
riparazione prima
dell'uso.
Problema di ruota
anteriote
AVVERTENZA –
NON TENTARE di
disattivare questo
dispositivo nel caso
in cui non siete
capaci di individuare
e di risolvere il
problema. Contattare
il fornitore di servizio
per riparazione
prima dell'uso.
Temperaura alta
Caricabatteria
scollegato
Temperatura alta.
In attesa…
Continuare a
ricaricare se non in
uso
Causa probabile/Eventualità
- Pressione costante sul paraurti
anteriore o superiore
- Le ruote anteriori si sono sollevate dal
terreno per più di 8 – 10 secondi.
- Il Robomower è ricaricato tramite la
spina e la temperatura dell'ambiente è
fuori dalla scala (sopra158ºF / 70ºC)
- Il Robomower è ricaricato nel Docking
Station e la temperature ambiente è
fuori dalla scala (sopra 158ºF / 70ºC);
- Il messaggio è visualizzato ogni volta
che la spina del caricabatteria è
scollegato dal tagliaerba.
- Visualizzato quando il tagliaerba non è
in funzionamento e non è collegato al
Caricabatteria/Docking Station per un
lungo tempo.
Azione
dell'utilizzatore/correttiva
- Allontanare il tagliaerba
dall'oggetto che preme sul
paraurti
AVVERTENZA – Togliere il
gruppo batterie prima di sollevare
il tagliaerba
Il Robomower ha urtato un
ostacolo, sollevando la parte
anteriore. Togliere questo
oggetto dall'area di taglio.
Il Robomower è stato usato su
una pendenza troppo ripida per
una tosatura sicura. Escluderla
dall'area di taglio.
L'erba folta impedisce la ruota
anteriore di andare avanti.
Alzare l'altezza di taglio.
Il terreno contiene larghi bucchi
o tacche nei quali la ruota
anteriore può cadere. Riempire
di terra queste aree.
- Ricaricare il Robomower non è
permesso quando la
temperatura dell'ambiente è
sopra 158ºF / 70ºC; Scollegare
la spina del caricabatteria e
aspettare fino a che la
temperature non si abbassa o
portare il Robomower in un
posto più fresco.
- Non fare niente, la ricarica è
arrestata e il Robomower
aspetta una temperature più
bassa, compresa nei limiti della
scala; se la temperature rimane
fuori dalla scala per più di 12
ore, il messaggio diventa ‘High
temp. Press GO’ (Temp. Alta.
Premere GO).
- Premere qualunque tasto per
visualizzare il display
precedente
- Rinviare il tosaerba al Docking
Station per ricarica/ collegare
alla spina del caricabatteria o
continuare l'operazione
61

Messaggio sul
display
Tasti bloccati
Batteria bassa
Temperatura bassa
Caricabatteria
scollegato
Temperatura bassa
In attesa…
Allontanarsi dal cavo - Il Robomower si trova troppo vicino o
Tosatura in
sovraccarica
In raffreddamento,
in attesa…
Mancanza segnale
cavo
Pronto per
continuare la ricarica
Ricaricare la batteria
Causa probabile/Eventualità
- La caratteristica di blocco Bambini è
stata attivata
- Il tagliaerba cerca il Docking Station ma
il voltaggio della batteria è troppo basso
per continuare il processo di ricerca.
- Il Robomower è ricaricato tramite la
spina e la temperatura dell'ambiente è
fuori dalla scala (sotto 32 ºF / 0 ºC);
scollegare la spina del Caricabatteria
dal Robomower.
- Il Robomower è ricaricato tramite il
Docking Station e la temperature
dell'ambiente è fuori dalla scala (sotto
32ºF / 0ºC);
sopra il cavo perimetrale
- I motori di tosatura hanno
funzionamento sotto una importante
carica per troppo tempo.
- L'interruttore perimetrale non è acceso
o non è collegato all'appezzamento
destinato alla tosatura.
- La batteria è completamante ricaricata.
- Il tempo Massimo di funzionamento è
stato raggiunto
Azione
dell'utilizzatore/correttiva
- Premere il tasto della freccia Up
⇑ e quindi premere il pulsante
‘C’. Il blocco Bambini può
essere disattivato sotto User
preferences.
- Guidare manualmente il
tagliaerba nel Docking Station
per ricaricarlo.
- Ricaricare il Robomower non è
permesso quando la
temperatura dell'ambiente è
sotto 32ºF / 0ºC; Scollegare la
spina del caricabatteriea e
aspettare fino a che la
temperature non si alza o
portare il Robomower in un
posto più caldo.
- Non fare niente, la ricarica è
arrestata e il Robomower
aspetta che la temperatura
rientri nella scala di
temperature concesse; se la
temperature persiste fuori dalla
scala per più di 12 ore, il
messaggio cambia in ‘Low
temp. Press GO’ (Temp. bassa.
Premere GO).
- Allontanare il Robomower da
1.5 – 3m circa dal cavo
perimetrale e riavviare
- Aspettare fino a che il
messaggio ‘Mowing overload
– Press GO’ non sia
visualizzato sul display.
- Accertarsi che l'interruttore
perimetrale sia collegato
all'appezzamento corretto e che
sia acceso.
- Tenere il caricabatteria
(l'alimentazione) collegato e
operare
- Collegare il caricabatteria al
tagliaerba
62

Messaggio sul
display
Sostituire le lame
ogni 200 ore
Causa probabile/Eventualità
- Un promemoria automatico è
visualizzato ogni 200 ore per sostituire
le lame
Azione
dell'utilizzatore/correttiva
- Sostituire le lame e riavviare il
contatore per il promemoria
della sostituzione delle lame
scegliendo l'opzione ‘Blades
replaced – Clear reminder’
sotto il menù ‘User
Preferences’
Sostituire la
lampadina
Riprovare altrove
Scegliere il paese
Impostare l'ora
Saltato: batteria
bassa
Cominciare altrove
Mancanza dei
Termistori
Tempo Completato
- La lampadina di funzionamento è
spenta
- Taratura non compiuta causa
interferenze nell'area
- Visualizzato sul display solamente al
primo uso
- Visualizzato ogni volta che il gruppo
batterie è tolto dal tagliaerba
(reimpostare l'operazione)
- Il Robomower ha saltato l'ultima
partenza dovuto a una tensione di
batteria insufficiente
- Un errore non identificato è occorso e
l'aiuto dell'utilizzatore è richiesta.
I motori di guida hanno funzionamento
sotto una importante carica
- thermistors difettosi / scollegati
(protezione di surriscaldamento)
- Il tempo di operazione programmato
per questo appezzamento è stato
raggiunto.
- Confermare il messaggio e
sostituire la lampadina di
funzionamento appena possible
- Spostare il Robomower (3-4m)
da questo punto e ritentare la
taratura.
- Seguire i suggerimenti sullo
schermo LCD per impostare il
paese
- Impostare l'orologio (giorno e
ora)
- Controllare che ci sia
abbastanza tempo tra le due
partenze in modo tale che la
batteria possa essere ricaricata
prima dell'operazione
successiva programmata (un
minimo di16 ore tra le due
operazioni).
- Allontanare manualmente il
tagliaerba da questa area e
riavviare l'operazione
Accertarsi che il tagliaerba non
sia bloccato, e che le ruote
possano girare.
- Contattare il fornitore di servizio
- Collegare al caricabatterie se
tutta la tosatura è stata
completata per quel giorno.
63

7.2 Altri problemi o errori di funzionamento
Problemi incontrati
Il Robomower non
lascia il Docking
Station per
l'operazione al
momento
programmato nel
Programa
Settimanale (Weekly
Program)
Il Robomower
raggiunge il Docking
Station quando I suoi
contatti sono sopra I
contatti del Docking
Station
Il Robomower non
trova i contatti del
Docking Station e/o
‘Front wheel problem’
(Problema della ruota
anteriore) è
visualizzato quando il
tagliaerba si trova nel
Docking Station
Causa probabile/Eventualità
- In generale, ogni volta che il tagliaerba non si avvia al momento programmato
il fatto è registrato sotto il ‘Weekly Program Display’ (Display del programma
settimanale (riferirsi alla parte 4.4 per maggiori informazioni).
- Controllare che il tempo nel tagliaerba
sia programmato correttamente
(giorno e notte)
- Tensione di batteria basso
- ‘Auto depart’ (Partenza automatica) è
impostato su ‘off’ (‘Partenza manuale’
è visualizzata quando il tagliaerba è
nel Docking Station)
- Differenza di altezza tra la base del
Docking Station e la superficie del
prato all'ingresso del Docking Station
- L'alimentazione elettrica/il
caricabatteria non è collegato
all'alimentazione principale.
- Nessuna alimentazione al ricettacolo
o alimentazione principale spenta
- Il Docking Station e/o il Robomower
hanno dei segni di bruciato e/o di
corrosione.
- Collegamento insufficiente o
scollegamento dei cavi (rosso e verde)
del Docking Station (red and green) ai
contatti.
Azione
dell'utilizzatore/correttive
- Impostare il tempo (Vedere
paragrafo 4.1)
- Controllare che ci siano un minimo
di 16 ore di ricarica nel Docking
Station prima della successiva
partenza programmata.
- Cambiare l'impostazione dell‘Auto
depart’ su ‘on’ (Vedere paragrafo
6.3)
- Controllare che il terreno prima del
Docking Station sia livellato con la
base del Docking Station base –
se necessario riempire di terra
l'area e livellare.
- Controllare che l'alimentazione sia
collegata al ricettacolo
dell'alimentazione principale.
- Controllare l'alimentazione a
questo ricettacolo principale
collegandola a un'altro
apparecchio. Accendere il
ricettacolo principale.
- Disassemblare il coperchio del
Docking Station svitando le viti e
controllare il collegamento del cavo
dell'alimentazione (nero) e del
connettore di cavo (verde).
- Controllare se l'indicatore luminoso
‘ON’ lampeggia nel Docking
Station quando si accende il
pulsante verde (ON).
- Pulire regolarmente I contatti del
Docking Station e del Robomower
utilizzando un panno umido.
- Contattare il vostro fornitore di
servizio se I contatti devono essere
sostituiti.
- Controllare I contatti buoni nelle
linguette (estremità des cavi rossa
e verde) ai contatti del Docking
Station.
64

Problemi incontrati
Il Robomower
funziona
nell'appezzamento
con il Docking Station
ma si arresta con il
messaggio ‘Recharge
battery’ (Ricaricare la
batteria) o con il
messaggio ‘time
completed’ (Tempo
completato).
Il Robomower cerca il
Docking Station in un
appezzamento senza
Docking Station
Il Robomower non
completa il bordo
nell'appezzamento
con il Docking Station
'Cut wire’ indicatore
lampeggiante
sull'interruttore
‘Replace Battery’
(Sostituire batterie)
indicatore
lampeggiante
sull'interruttore
perimetrale
1 of 2
Causa probabile/Evententualità
- Il Robomower operava dal prato (non
dal the Docking Station) quando il
display principale visualizza ‘Zona B’
- Il Robomower operava dal prato in
‘Mowing’ (senza ‘Edge’ - Bordo)
quando il display principale visualizza
‘Dock zone’
- Il Robomow ha eseguito una breve
distanza del bordo e lo tiene in
memoria.
- Cavo scollegato dall'interruttore
perimetrale
Taglio del cavo perimetrale
Collegamenti insufficienti
- Batterie deboli - Installare nuove batterie C alcaline
- giuntura del cavo insufficiente
(controllare che l'interruttore
perimetrale sia acceso, prima
l'indicatore ‘Cut wire’ lampeggia una
volta).
- Cavi attorcigliati, o una vite
terminale, isolata con un nastro di
isolamento non è una giuntura
soddisfacente. Un terreno umido
causerà l’ossidazione dei conduttori
e dopo un periodo un circuito
guasto.
Azione dell'utilizzatore/correttiva
- Quando il Robomower opera
dall'interno del prato, controllare il
display principale su ‘Dock zone’.
- Quando il Robomower opera dal
una zona di non-docking,
controllare il display principale su
‘Zona B’ o avviare l'operazione in
modalità ‘Edge’ (Bordo).
- Scegliere l'opzione ‘Back to
default’ (Ritorno a Default) sotto il
menù ‘Entry points’ (Punti
d'ingresso). (Cancellerà la distanza
del bordo dalla memoria/)
- Controllare che il cavo perimetrale
sia collegato e che le teste del
cavo siano solidamente fissate.
Camminare lungo il perimetro,
inclusi le isole e gli ostacoli esclusi
con il cavo perimetrale per cercare
tagli o rotture nel cavo. Riparare
con I connettori di giuntura del
cavo
Controllare e riparare tutti I
collegamenti allentati/insufficienti o
corrosi.
Utilizzare I connettori forniti nella
scatola. Sono impermeabili e
danno un collegamento elettrico
attendibile.
65

Replace Battery’
(Sostituire batterie)
indicatore
lampeggiante
sull'interruttore
perimetrale
2 of 2
L'interruttore
perimetrale non è
attivato quando è
acceso.
Il Robomower non
funziona e niente è
visualizzato sullo
schermo LCD
Il Robomow va avanti
ma le lame non
tagliano
Tempo di lavoro
breve, funziona meno
del tempo normale.
Cavo perimetrale troppo lungo per
uno solo appezzamento
- Le batterie sono completamente
scariche.
Le batterie sono installate con la
posizione di polarità sbagliata.
L'interruttore perimetrale non è installato
verticalmente o è esposto
all'acqua/pioggia.
- Il tagliaerba è in pausa.
Il gruppo batterie si è scaricato in
seguito a una mancanza di
manutenzione di ricarica.
- ‘Mowing ‘(Tosare) è stato spento. - Tornare sotto ‘User Preferences’
- Il gruppo batterie non è
completamente ricaricato.
Il tempo di lavoro (‘Work Time ‘) per
questo appezzamento è impostato per
arrestarsi dopo una durata di tempo
predefinita.
L'erba è estremamente folta o molto
umidà
Il gruppo batterie raggiunge una
normale fine di durata.
Il controllo manuale non è solidamente
roteato e allineato nel suo supporto e
fa rimbalzare e arresta il tagliaerba.
Un cavo perimetrale con una
lunghezza massimale di 300 m è
consigliato. Aree che richiedono
lunghezze superiori devono essere
divise in appezzamenti separati.
Se l'indicatore ‘Cut Wire’
lampeggia una volta quando
l'interruttore perimetrale è attivato,
questo conferma una lunghezza
eccessiva per un solo
appezzamento.
- Installare nuove batterie C alcaline
Verificare il posizionamento corretto
delle batterie.
La protezione all'acqua/umidità
dell'interruttore perimetrale è attiva
solo se montato verticalmente.
Riposizionare l'interruttore
perimetrale.
- Se non è sempre collegato al
caricabatterie quando non è in
uso, il Robomower risparmerià
energia in modalità di pausa.
Togliere il gruppo batterie dal
tagliaerba e reinserirlo dopo 10
secondi
E' richiesto lasciare il caricabatteria
collegato al Robomower quando
non è in uso. La mancata
osservanza può causare danni
irreversibili al gruppo batterie.
Contattare il vostro fornitore di
servizio.
- Collegare il caricabatteria al
tagliaerba e tenerlo collegato
finché lo schermo LCD non
visualizza il messaggio ‘Ready –
Keep Charging’ (Pronto – Continua
a ricaricare)
Il tempo di lavoro può essere
cambiato sotto ‘User Preferences’
Alzare l'altezza di taglio. Tosare
l'erba frequentemente per
prevenire una forte ricrescita. Non
tagliare erba umida.
Sostituire il gruppo batterie. Curare il
gruppo batterie correttamente
seguendo le istruzioni.
Controllare che il filo della bobina sia
completamente collocato nel
supporto sotto il controllo manuale
e che il controllo manuale sia
allineato con la superficie del
tagliaerba..
66

Problemi incontrati
Il Robomow è
passato sopra il cavo
durante l'operazione
AVVERTENZA
Il Robomower è
progettato per restare
all'interno di un
perimetro attivo del
prato quando è
installato
correttamente. Nel
caso improbabile che
il tagliaerba passa
sopra il cavo, NON
USARE il tagliaerba
finché il problema
non sia risolto. Se
spostare il cavo
perimetrale non
risolve il problema,
contattare il vostro
fornitore di servizio.
La lampadina di
funzionamento del
Robomower
lampeggia una volta
quando il gruppo
batterie è inserito, ma
il display LCD non
visulizza niente.
Larghi appezzamenti
di erba non tagliata
rimangono dopo la
tosatura completa del
Robomower
Il paraurti non si
attiva quando urta un
ostacolo.
Causa probabile/Evententualità
- Installazione impropria del cavo
perimetrale O appezzamento
adiacente (a meno di 4 m) funziona
simultaneamente.
- Il fusibile del gruppo batterie non è
stato installato
- Power Pack is not fully charged for
operation. Il gruppo batterie non è
completamente ricaricato per il
funzionamento
- Il tempo di lavoro (‘Work Time’) non è
sufficiente per la misura
dell'appezzamento.
- Il gruppo batterie raggiunge la normale
fine di durata.
- Grass is extremely overgrown or very
wet.
- Power Pack capacity is damaged from
poor maintenance.
- L'ostacolo è alto meno di 15 cm, non è
abbastanza rigido o è posizionato in
un angolo del terreno che impedisce
un contatto diretto con la superficie
esterna del paraurti.
Azione dell'utilizzatore/correttiva
- Riferirsi alle regole
dell'installazione del cavo
perimetrale, in particolare per gli
angoli. Non operare appezzamenti
adiacenti a meno di 4 m.
- Installare il fusibile del gruppo
batterie.
- Collegare il caricabatterie al
tagliaerba e tenerlo collegato
finché lo schermo del LCD non
visualizza il messaggio ‘Ready –
Keep Charging’ (pronto – continua
di ricaricare
- Aumentare il tempo di lavoro,
‘Work Time’, sotto ‘User
Preferences’ O impostare ‘Work
Time’ a ‘MAX’
- Sostituire il gruppo batterie e
seguire le istruzioni di
manutenzione nel manuale.
- Raise cutting height. Always mow
the grass frequently enough to
prevent over growth. Refrain from
cutting wet grass.
- Replace Power Pack and follow
maintenance instructions in
manual.
- Togliere l'ostacolo.
- Installare un cavo intorno
all'ostacolo (riferirsi alla parte1.8)
- Escluderlo dall'area di taglio con il
cavo perimetrale.
67

Problemi incontrati
Il Robomower è bloccato
frequentemente quando
non opera sul terreno
ottimale.
Causa probabile/Eventualità
Terreno non libero. Liberare completamente il terreno
Il taglio dell'erba è troppo basso. Alzare l'altezza di taglio.
Il terreno necessita degli
aggiustamenti.
Riempire tutti i bucchi, coprire o
escludere le radici ecc in modo da
Azione
dell'utilizzatore/correttiva
spianare il terreno
Il Robomower non
completa la tosatura
La lampadina di
funzionamento non
lampeggia quando le
lame sono in azione.
Il display LCD è in una
lingua straniera
Ostacolo lungo il percorso
Geometria particolare del perimetro
Lampadina difettosa.
La lingua d'installazione è stata
cambiata o non impostata
correttamente.
Osservare tutta l'operazione del prato e
controllare che non ci siano ostacoli.
RL500 & RL550, cominciare la tosatura
dal lato opposto del prato. Contattare il
vostro fornitore di servizio se questo non
risolve la situazione.
Sui RL800 & RL850, eseguire la
funzione ‘Learn Edge’
Sostituire la lampadina di
funzionamento.
Togliere il controllo manuale e seguire la
sequenza;
1. Premere il pulsante ‘C’
2. Premere due volte il pulsante
‘GO’
3. Premere due volte ‘il tasto della
freccia Down’ ⇓
4. Premere una volta il pulsante
‘GO’
5. Usare la freccia e scorrere alla
lingua corretta.
6. Premere ‘GO’ per confermare la
selezione.
68

Front
5800 RPM
Capitolo 8
Specifiche tecniche
Top
Dim
ensioni
89cm X 66,5 X 31,5 cm
Peso
22,6 kg (unità) + 12,6 kg (gruppo batterie)
Livello rumore
Inferiore a 85 db (A)
Parte superiore- Parte inferiore- Fronte- Retro- Lato
Bottom
Larghezza tosatura
3 lame corrispondenti a 56 cm
Taglia 1,5 cm oltre le ruote
Altezza tosatura
6 impostazioni sul davanti e 2 sul retro.
A
ltezza alta di taglio delle lame: 44-81mm
Altezza bassa di taglio delle lame: 26-63mm
Velocità lame
Capacità di tosatura
Paragonabile a quella di un tosaerba a benzina da 5,5 HP
Codice Anti-Furto
Iscrivere qua il codice d
avete selezionate per il sistema
anti-furto in caso di dimenticanza.
-----------------------------------------------
Numero di serie del Robomower
________________________
i 4 cifre che
Rear
*
Side
*
Confronto completo
67

Serious injury can occur
.
Always remove Power Pa
ck before lifting
!
Capitolo 9
Cura e manutenzione
Scheda di manutenzione consigliata
Frequenza del
servizio di
manutenzione
Ogni uso
50 ore
150-200 ore
9
.1 Area di taglio
La parte inferiore dell'area di taglio deve essere ispezionata, e pulita se necessario, tra le operazioni. Il
Robomower è un tagliaerba frantumatore e può accumulare erba tagliata sotto l
particolarmente quando l
AVV
WARNING
ERTENZA!
Controllare e togliere erba tagliata e sudiciume dall
particolarmente quando tagliate erba umida e
Ricaricare il gruppo batterie dopo ogni uso
Togliere il gruppo batterie e cont
.2)
9
Sostituire le lame; sostituirle molto frequentemente se i bordi sono molto attu
smussati (vedere Figura 9
Ricordare di riattivare il promemoria automatico della sostituzione delle lame dopo
ogni sost
erba è umida e bagnata.
ituzione (riferirsi alla parte 9
Procedura
.2)
Figura 9.2
di manutenzione
bagnata (riferirsi alla parte 9
rollare danni eventuali alla lame (riferirsi alla parte
.2)
area di taglia se necessario,
.1)
area di taglia,
titi o
Rischio di lesioni gravi. Togliere sempre il gruppo batterie prima di
sollevare il tagliaerba. Le lame sono molto affilate e possono causare
mower
dei tagli severi o delle lacerazioni. Indossare sempre guanti robusti
lacerations
quando lavorate sulle lame o vici
and around the blades
L
accumulazione di molta erba può essere tolta con un piccolo bastone di legno o un oggetto simile.
Grattare con cautela i residui di erba sotto l
maggiore spazio. Non rovesciare il tosaerba, rischio di danni al controllo manuale. Appoggiare il tosaerba
su un
altra superficie per avere maggiore accesso all
MAI
utilizzare una idropulitice a pressione o un tubo da giardino. L
componenti elettrici del Robomower. Utlizzare un panno umido per asciugare dopo la pulizia.
.
.2 Le lame
9
Le lame del Robomower devono essere controllate in caso di danni tra le operazioni. Sostituire qualunque
lama danneggiata. Utilizzare solamente lame affilate. Sostituire le lame al meno una volta ad ogni stagione
di taglio, più spesso se sono smussate. E
Una
macchina per affilare è sconsigliato. Veder Figura 9.1
.
Blades are very sharp and can cause severe cuts or
.
Always wear heavy work gloves when working with
.
danneggiata o rotta. Usare solamente lame affilate.
area di taglia. Se necessario, togliere le lame per avere
consigliato sostituire le 3 lame per un miglior funzionamento.
Never use a damaged or broken blade
Use only sharp blades
area di taglio.
no ad esse. Non usare mai una lama
.
acqua potrebbe danneggiare i
.
70

acco
ppiante
Il Robomower ha un promemoria automatico per sostituire le lame dopo ogni 200 ore di funzionamento. Il
messaggio
il pulsante GO cancellerà il messaggio e il Robomower potrà funzionare.
Ad ogni sostituzione delle lame, è consigliato riavviare il promemoria contatore di sostituzione delle lame
scegliendo l
dell'utilizzatore) e premere il pulsante GO per azzerare il promemoria
Replace blades
opzione
Blades replaced
every 200 ore
(Sostituire lame) sotto il menù
(Sostituire lame
ogni 200 ore) sarà visualizzato e
User Preferences
.
(Preferenze
premere
Figura
Schiacciare le
linguette di plastica
e tirare verso
AVVERTENZA! TOGLIERE
SEMPRE IL GRUPPO BATTERIE
PRIMA DI MANEGGIARE LE
9.1
l
esterno
LAME!
Tirare qui
Linguette
Schiacciare le
linguette di plastica
e tirare verso
l
esterno
Tirare qui
Dentellatura
Per sostituire le lame, schiacciare le linguette di plastica alla base della
lama e tirare verso l
spingerla verso l
Figura 9.2
Usare un bastone di legno o un oggetto simile per pulire l
rimuovere i residui di erba accumulatosi. Togliere le lame per un maggiore
accesso se necessario.
esterno. Per inserire una lama, tenerla per la base e
interno fino a quando si avverte lo scatto.
area di taglia e
71

9.3 Pulizia estern
Utilizzare sempre un panno umido o una spazzola morbida per pulire la superficie esterna del Robomower.
Un detersivo leggero può essere utilizzato in una soluzione d
per lavare. Non utilizzare mai soluzioni di pulizia abrasive. Non utilizzare una idropulitrice a pressione o un
tubo da giardino.
9
.4 Gruppo batterie
Seguire sempre le istruzioni di manutenzione e di ricarica riportate nel Capitolo 5 per il gruppo batterie.
9
.5 Disporre del gruppo batterie usat
Importante! Non porre le batterie usate nei rifuiti domestici. La batteria deve essere raccolta, riciclata e
posta in un luogo appropriato, nel rispetto dell
riciclaggio.
.6 Giuntare il cavo
9
Se il cavo perimetrale deve essere giunto: utilizzare i connettori forniti nella scatola. E
una connessione elettrica attendibile.
I cavi attorcigliati,
soddisfacente. Un terreno umido causerà l
a
o
ambiente. Riportare il gruppo batterie usate in un posto di
perimetrale
Informazione Important
o una vite terminale, isolati con un nastro
ossidazione dei conduttori e dopo un periodo un
circuito guasto.
acqua, quindi immergere e strizzare il panno
impermeabile e da
e!
di isolazione non sono
una giuntura
9.7
Docking Station
Tenere l'ingresso e l'area del Docking Station
tendono ad accumularsi in quelle aree. Non utilizzare un tubo da giardino direttamente verso o nel
Station.
docking
Operare con cautela quando tagliate le erbacce intorno al Docking Station
Rischio di danni alla superficie o al filo dell
con un insetticida. In caso di danno del filo dell
scollegare l
9.8
Il gruppo batterie
Caricare il gruppo batterie fino alla comparsa del messaggio
corso) e conservarlo fuori dal Robomower sollevato dal suolo i.e su un ripiano di legno in un ambiente
fresco e asciutto con una temperatura non inferiore a 20°C. Una piena ricarica del gruppo batterie può
essere conservato per oltre 3 mesi, se conservato in un ambiente fresco e asciutto. Ricaricare il gruppo
batterie prima di usare il Robomower all
Il Robomower
Togliere il gruppo batterie dal Robomower e pulire il Robomower (riferirsi alla par
Robomower in un ambiente pulito e asciutto e coprirlo per tenerlo pulito e riparato. Verificare che il
Robomower stia sulle ruote e che l
Importante!
la posizione delle lame; se necessario, sostituire
Utilizzare un panno umido e una spazzola per pulire la superficie e l'area del coperchio
dove sono
'alimentazione e sostituire il filo dell'alimentazione
Conservazione invernale
Non conservare il Robomower appoggiato sui paraurti, non premere sui paraurti. Controllare
presenti i contatti.
privi
di foglie, bastoncini, e ramoscelli e altri detriti che
'alimentazione
'alimentazione,
inizio di una stagione.
area intorno ai paraurti sia libera.
le lame (riferirsi alla parte 9
con
. Trattare con cautela
smettere di usare il Docking Station,
.
Ready keep charging
.2)
Docking
un tagliaerba a motore
eventuali
ti 9.1 e 9.3). Conservare il
mucchi di inse
(Pronto, Carica in
del
tti
.
Cavo perimetrale
Scollegare il cavo perimetrale, togliere le batterie e conservare in un ambiente asciutto.
72

Do
cking Station
E
' raccomandato che il Docking S
Scollegare l
-
-
Svitare le due viti mantenendo il coperchio del Docking Station
- Sc
- Scollegare il connettore di appezzamento verde e collocare un connettore di cavo impermeabile
sopra le due esremità libere del cavo perimetrale per prevenire la corrosione dei cavi mentre non
sono coll
-
Rimuovere la base del
Collocare tutte le parti in un ambiente asciutto.
-
Se non è comodo rimuovere il filo dell'alimentazione, scollegare prima l'alimentazione dal
ricettacolo dell'alimentazione, poi scollegare le teste dell'alimentazione collegate al quadro del
docking.
devono essere protette durante l'inverno per prevenire l'ossidazione. Potete collocare un
connettore serracavi su ogni estremità di questo filo per proteggerlo durante l'inverno. Se
questo o un connettore simile resistente al tempo non è utilizzato, esiste un rischio di
ossidazione. Non dimenticare di scollegare le estremità del cavo perim
dell'appezzamento e di proteggere le estremità di questi cavi nello stesso modo delle teste
dell'alimentazione elettrica
tation sia rimosso durante l
'alimentazione dal ricettacolo dell'alimentazione.
ollegare il connettore di appezzamento ve
egati alla station
Dopo aver scollegato le teste dell'alimentazione, ogni estremità di queste teste
Docking Station
.
rde (tra il cavo perimetrale e il quadro del docking).
e collocarla in un ambiente asciutto.
'inverno
.
:
etrale
dal connettore
Prima dell'inizio di ogni stagione di tosatura, lucidare delicatamente i contatti di ricarica sul
Robomower e s
o utilizzare una lana d'acciaio di
ossidazione e permetterà un contatto ottimale.
Prima della
Docking Station (riferirsi alle parti 1.11 a
Lucidare delicatamente questi
contatti all'inizio di ogni
o pi
ul Docking Station con
prima
operazione della nuova stagione, è richiesto ricollegare l'installazione del
stagione
ù spesso se necessario
un piccolo pezzo di carta vetrata
00
o di grado superiore. Questo rimuoverà l'eventuale
Vedere Figura
1.13)
,
.
9.3.
, 200
ghiaia o superiore
Lucidare delicatamente l'area
indicata su questi contatti all'inizio
di ogni stagione, o più spesso se
necessario.
Figura
9.3
Lucidare i contatti sul tagliaerba e sul Docking Station
73

Capitolo 10
Accessori
Interruttore perimetrale
Convenienza di avere un interruttore per
non spostare un interruttore da un
Cavo perimetrale
Per prati più larghi e appezzamenti
supplementari
Convenienza di incrementare la capacità
appezzamento a un altro.
Per prati più larghi e appezzamenti
con una seconda batteria.
ogni appezzamento e
Pacco di picchetti (50)
s
upplementari
Gruppo batterie
Equipaggiamento di connettori
Contiene due connettori di interruttore perimetrale
p
er appezzamenti supplementari e tre bulloni di
cavi in silicone per riparare o giuntare il cavo
perimetrale.
aggiu
Serie di lame
Tenere una serie di lame di ricambio. Delle lame
affilate sono importanti per
Caricabatteria veloce (esterno)
Ricaricare il gruppo batterie di origine o
ntivo fuori dal tagliaerba per 8
un taglio ottimo e sicuro
per un uso veloce.
ore circa
.
74

Friendly Robotics Garanz
Friendly Robotics garantisce all
lavorazione se usati in condizioni residenziali normali* durante un periodo di 24 mesi, 12 mesi per le
batterie a partire dalla data dell
un periodo di novanta giorni dall
manodopera necessaria alla riparazione, solamente se effettuata da personale autorizzato da Friendly
Robotics. Si richiede una prova valida dell
spese di trasporto di nessun tipo. Il proprietario sarà responsabile delle spese di trasporto verso un centro
autor
izzato da Friendly Robotics.
* Normal è definito l
considerato uso commerciale, e questa garanzia non verrà applicata.
Articoli e condizioni non coperte da garanzia
Questa
sostituzione riparazione per cau
associabile
autorizzato da Friendly Robotics
esempio in ambiente umido, oppure rotture dovute a fornitura di corrente elettrica con sbalzi/irregolare, o
periodo di prolungato inutilizzo.
pioggia, riparazioni dovute a cause naturali come fulmini o altro.
garanzia non copre i seguenti casi:
Costi di normale manutenzione, come lame di ricambio o affilatura delle lame
Nessun prodotto o parti che siano state alterate, usate impropriamente, trattate malamente, o richiesta di
Normale usura, inclusi lo scolorimento della pittura o le parti in plastica.
Costi di installazione o reinstallazione, rimozione dell
con una impropria installazione o uso del prodotto
Qualsiasi prodotto che sia stato aperto, riparato, modificato e/o alterato da qualsiasi riparatore non
Riparazioni dovute a batterie usate impropriamente e/o carico del
Riparazioni dovute a danneggiamenti provocati dall
ia Limitata per la serie RL
aquirente che i modelli RL non presentano difetti di materiali e di
acquisto. I prodotti accessori come batterie di ricambio sono garantite per
acquisto. La garanzia copre il costo delle parti di ricambio e la
acquisto per aver diritto alla garanzia. La garanzia non copre
uso del prodotto per uno stesso lotto, come casa. Usare in più di una locazione è
se accidentali o mancanza dell
appropriata manutenzione;
installazione o qualsiasi costo o danneggiamento
la batteria fatto impropriamente, ad
acqua, che non siano dov
uti all
esposizione alla
Istruzioni per ottenere il servizio di garanzia
Se ritenete che il vostro prodotto Friendly Robotics abbia un difetto di materiale o di lavorazione contattate
il r
ivenditore da cui avete acquistato il prodotto.
Responsabilità del proprietario
Dovete conservare e curare il vostro prodotto Friendly Robotics seguendo le procedure descritte nel
manuale dell
effettuata da un fornitore di servizio o da voi stessi.
Condizioni Generali
La riparazione deve essere eseguita da un servizio autorizzato Friendly Robotics, questo è l
perché la riparazione sia protetta da garanzia. Non ci sono altre garanzie espresse o implicite. Tutte le
altre garanzie implicite di commerciabilità o idoneità per uso sono limitate alla durata della garanzia
espressa. I prodotti Friendly Robotics coperti da questa garanzia, inclusi costi per la sostituzio
dell
apparecchiatura o servizio durante un ragionevole periodi di malfunzionamento o di inutilizzo. Alcuni
stati non permettono l
specifici diritti legali, ed altri d
operatore. La manutenzione di routine sarà a spese vostre, sia nel caso in cui venga
esclusione di danneggiamenti incidentali o la limitazione. Questa garanzia vi fornisce
Seguire sempre le istruzioni di sicurezza menzionate nel manuale di
iritti legali che variano di stato in stato.
istruzioni.
unico modo
ne
75

www.friendlyrobotics.com
 Loading...
Loading...