


User Manual
CMS2

1
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018

2
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Table of Contents
1 General Warnings and Information for the End User ............................................................................................... 5
1.1 General Safety Warnings .................................................................................................................................... 5
1.3 Operator Position and Dangerous Areas ............................................................................................................ 6
1.4 Dangers and Hazards that cannot be eliminated ............................................................................................... 6
1.5 Personal Protective Equipment .......................................................................................................................... 7
2 Transportation and Storage ....................................................................................................................................... 8
2.1 Transportation and Handling Conditions ........................................................................................................... 8
2.2 Storage ................................................................................................................................................................ 8
3 Warranty, Limitations and Disclaimers ...................................................................................................................... 9
4 Product Presentation ............................................................................................................................................... 11
4.1 Benefits ............................................................................................................................................................. 11
4.2 Product features ............................................................................................................................................... 11
4.2.1 Moisture Sensor......................................................................................................................................... 11
4.2.2 Data Logger ................................................................................................................................................ 12
5 Technical Specification ............................................................................................................................................ 13
5.1 Performance ..................................................................................................................................................... 13
5.2 Electrical Interface ............................................................................................................................................ 13
5.3 Physical Attributes ............................................................................................................................................ 13
5.4 Fluid Characteristics .......................................................................................................................................... 15
5.5 Environment ..................................................................................................................................................... 16
6 Product Installation and General Operation ........................................................................................................... 17
6.1 Installation ........................................................................................................................................................ 17
6.1.1 Physical Procedure .............................................................................................................................. 17
6.1.2 Electrical Interface ..................................................................................................................................... 18
6.1.2 Hydraulic Connection ................................................................................................................................ 24
6.2 General Operation ............................................................................................................................................ 27
6.2.1 Physical Checks .......................................................................................................................................... 27
6.2.2 Front Panel Operation ............................................................................................................................... 28

3
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
6.2.3 CMS removal and Product Maintenance ................................................................................................... 30
6.3 CMS Control ...................................................................................................................................................... 31
6.3.1 Computer Connection ............................................................................................................................... 31
6.3.2 PC Software Operation .............................................................................................................................. 32
6.3.3 Settings ...................................................................................................................................................... 33
6.4 Standard Communication Protocols ................................................................................................................. 42
6.4.1 Modbus ...................................................................................................................................................... 42
6.4.2 CAN-bus ..................................................................................................................................................... 46
6.4.3 Analogue 4-20mA Modes .......................................................................................................................... 49
6.5 Disposal ............................................................................................................................................................. 51
7 Troubleshooting / FAQ ............................................................................................................................................ 52
7.1 Misuse of Product ............................................................................................................................................. 52
7.2 Fault Finding ..................................................................................................................................................... 52
7.2.1 LED Flashing / Fault Codes ......................................................................................................................... 52
7.2.2 Test Status ................................................................................................................................................. 53
7.2.3 Other Faults ............................................................................................................................................... 53
7.3 Test Duration .................................................................................................................................................... 54
8 How to Order ........................................................................................................................................................... 55
8.1 Common Features ............................................................................................................................................ 55
9 Related Products ...................................................................................................................................................... 56
9.1 RDU 2.0 ............................................................................................................................................................. 56
9.2 CMSUSBI ........................................................................................................................................................... 56
10 Service and Recalibration ...................................................................................................................................... 57
11 Reference ............................................................................................................................................................... 58
11.1 Further Modbus Information.......................................................................................................................... 58
11.1.1 Modbus Registers .................................................................................................................................... 58
11.1.2 Implementing Modbus ............................................................................................................................ 63
11.2 Further CAN-bus Information ......................................................................................................................... 65
11.2.1 Example Walk through ............................................................................................................................ 65
11.2.2 Messages ................................................................................................................................................. 70
11.3 Measuring Water in Hydraulic and Lubricating Fluids.................................................................................... 73
11.4 ISO4406:1999 Cleanliness Code System ......................................................................................................... 75

4
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
11.5 NAS1638 Cleanliness Code System (now defunct, replaced by SAE AS4059E Table 1) ................................. 76
11.6 SAE AS4059 REV E Cleanliness Classification for Hydraulic fluids .................................................................. 76
11.7 Recommendations .......................................................................................................................................... 77
11.8 Hydraulic System Target Cleanliness Levels ................................................................................................... 78
11.9 New ISO Medium Test Dust and its effect on ISO Contamination Control Standards ................................... 79
11.10 Clean Working Practices ............................................................................................................................... 83

5
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
1 General Warnings and Information for the End User
1.1 General Safety Warnings
Do not operate, maintain or carry out any procedure before reading this manual. Any individual operating the
unit shall wear the following Personal Protective Equipment:
Protective eyewear
Safety shoes
Gloves
Overalls (or other suitable protective clothing)
Before carrying out any machine installation procedures and/or before use, one should scrupulously follow the
instructions listed in this manual. Moreover, it is necessary to comply with the current regulations related to
occupational accident prevention and safety in the workplace.
Notices aimed at the prevention of health hazards for personnel operating the machine are highlighted in this
document with signs having the following meaning:
WARNING
It relates to important information concerning the product, its use or part of this
documentation to which special attention must be paid
DANGER
It means that failure to comply with the relevant safety regulations may result in death,
serious injury or serious property damage.
In order to quickly identify the professionals concerned with reading this manual, the following definitions were
used:
OPERATOR
This is any individual whose task is to use the machine for production purposes. The
operator is aware of all the measures taken by the machine manufacturer in order to
eliminate any source of injury risk in the workplace and takes into account the
operational constraints.
PERSONNEL
INVOLVED IN
SLINGING AND
HOISTING
OPERATIONS
This is any individual whose task is to handle the machine or parts of it. Personnel
involved in slinging and hoisting operations are aware of the issues regarding the safe
transfer of machinery or parts of it and, therefore, uses appropriate lifting equipment,
following the instructions provided by the product manufacturer.
CAUTION
It means that failure to comply with the relevant safety regulations may result in mild
injury or property damage.

6
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
MACHINE SETTER
This is any individual whose task is to set up the machine for its operation. The
machine setter is aware of the measures taken to eliminate all sources of injury risks in
the workplace and takes into account the operational constraints. The machine setter
takes all the appropriate precautions in order to operate in utmost safety conditions.
MAINTENANCE
TECHNICIAN
This is any individual whose task is to carry out maintenance activities on the machine.
The maintenance technician is aware of the possible danger situations that may arise
and takes the appropriate precautions in order to eliminate the risks of accidents in the
workplace.
ELECTRICIAN
This is any individual whose task is to carry out maintenance activities on the electrical
wiring of the machine. The electrician is aware of the possible danger situations that
may arise and takes the appropriate precautions in order to eliminate the risks of
accidents in the workplace.
1.3 Operator Position and Dangerous Areas
No operator is required for operating the unit. However, the following areas are to be considered dangerous: The
ones close to the electric motor because of live equipment with potentially hot surfaces.
WARNING
The unit shall be taken out of service and/or dismantled in accordance with the
current regulations in force in the country where the machinery is installed
WARNING
The machinery is not suitable for outdoor use and all the electrical devices have a
protection class starting from IP 55 upwards.
1.4 Dangers and Hazards that cannot be eliminated
-Electric shock risk on the electric motor; in case of motor malfunction
-Burn risk because of high temperatures
-Accidental oil leaks with consequent risk of slipping
-Hose breakage and resulting lubricant loss
With oil temperatures exceeding 40/45 °C, it is vital to be extremely careful when handling the metal lances/the
hoses and when moving the unit. Avoid direct contact with hot oil and with the filter body.
ALL EQUIPMENT SHOULD BE ALLOWED TO COOL PRIOR TO HANDLING, AFTER IT HAS BEEN IN USE

7
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
1.5 Personal Protective Equipment
When operating the unit, personnel must be wearing safety shoes, gloves and goggles. In general, the PPEs to be
used according to the activities on the machinery are listed in the following table:
Activity
PPEs
Ordinary operation
Shoes, gloves, goggles, overall
Planned maintenance
Shoes, gloves, goggles, overall

8
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
2 Transportation and Storage
2.1 Transportation and Handling Conditions
The unit is shipped in a cardboard box, encased in polyurethane foam.
The packed weight of the CMS and accessories is 2.5kg.
2.2 Storage
The unit should be stored in a suitable location away from the production area when not in use. The unit should
be stored with the caps provided on the ports. This location should not impede any other production or
personnel.

9
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
3 Warranty, Limitations and Disclaimers
RMF Systems warrants that the products that it manufactures and sells will be free from defects in material,
workmanship & performance for a period of 12 months from the date of shipment.
Hardware/Firmware
Should the hardware prove defective during the warranty period, RMF Systems, at its discretion, will either repair
the defective product or replace it with an equivalent product in exchange for the defective unit without charge
for parts, labour, carriage and insurance.
Software
RMF Systems warrants that software will operate substantially in accordance with its functional specification for
12 months from date of shipment provided that the integrity of the operating environment has not been
compromised through misuse, inappropriate handling, abnormal operating conditions, neglect or damage
(unintentional or otherwise) or the introduction of third party product (software or hardware) that in any way
conflicts with the RMF Systems product.
Eligibility
This warranty extends to the original purchaser only or to the end-user client of an RMF Systems authorised
affiliate.
How to obtain service?
To obtain service under the terms of this warranty, the customer is required to notify RMF Systems before the
expiration of the warranty period and to return the item in accordance with RMF Systems product return policy.
Any product returned for warranty repair must be accompanied by a full fault report specifying the symptoms and
the conditions under which the fault occurs. Should RMF Systems incur additional cost as a result of a failure to
complete the appropriate paperwork, an administrative charge may be levied.
Exclusions
This warranty shall not apply to any defect, failure or damage caused by improper use or improper or inadequate
care. RMF Systems shall not be obligated to provide service under this warranty if:
a) Damage has been caused by a failure to make a full and proper inspection of the product (as described by the
documentation enclosed with the product at the time of shipment) on initial receipt of the product following
shipment;
b) Damage has been caused by the attempts of individuals, other than RMF Systems staff to repair or service the
product;
c) Damage has been caused by the improper use or a connection with incompatible equipment or product
including software applications.
Charges
Under cover of this warranty, RMF Systems will pay the carriage and insurance charges for the shipment of
defective product back to site of manufacture and for its return to the client’s original site of despatch except
when:
a) RMF Systems product return policy has not been followed.
b) Product failure is caused by any of the exclusions described above, when the customer will be liable for the full
cost of the repair (parts and labour) plus all carriage and insurance costs to and from RMF Systems premises.
c) The product is damaged in transit and a contributory cause is inadequate packaging. It is the customer’s
responsibility to ensure that the packaging used to return equipment to RMF Systems is the same, or has

10
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
equivalent protective qualities, to that used to ship the product to the customer in the first instance. Any damage
resulting from the use of inadequate packaging will nullify RMF Systems obligations under this
warranty. Should the customer’s product be damaged in transit following a repair at RMF Systems site, a full
photographic record of the damage must be obtained (packaging and the product) to support any claim for
recompense. Failure to present this evidence may limit RMF Systems obligations under this warranty.
THIS WARRANTY IS GIVEN BY RMF SYSTEMS IN LIEU OF ANY OTHER WARRANTIES, EXPRESS OR IMPLIED,
INCLUDING BUT NOT LIMITED TO ANY IMPLIED WARRANTY OF MERCHANTABILITY, NON INFRINGEMENT OR
FITNESS FOR A PARTICULAR PURPOSE. RMF SYSTEMS LTD SHALL NOT BE LIABLE FOR ANY SPECIAL,
INDIRECT, INCIDENTAL OR CONSEQUENTIAL DAMAGES OR LOSSES ( INCLUDING LOSS OF DATA), WE
SPECIFICALLY DISCLAIM ANY AND ALL WARRANTIES TO CUSTOMERS OF THE CUSTOMER. THE CUSTOMER’S
SOLE REMEDY FOR ANY BREACH OF WARRANTY IS THE REPAIR OR REPLACEMENT, AT RMF SYSTEMS
DISCRETION, OF THE FAILED PRODUCT.
RMF Systems BV maintains a policy of product improvement and reserves the right to modify the specifications
without prior notice.

11
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
4 Product Presentation
The CMS measures and quantifies the numbers of solid contaminants in Hydraulic, Lubrication and Transmission
applications. The CMS-M is designed to be an accurate instrument for permanently installed applications utilising
mineral oil as the operating fluid. Other fluid media versions are available for offshore [N] and aerospace
phosphate ester [S] applications.
The unit can operate using any of the international standard formats ISO 4406:1999, NAS 1638, AS 4059E/F and
ISO 11218.
The CMS incorporates a machine connector for power and PLC connection, capable of RS485, CANBUS or 4-20mA
signaling. A separate connector is also provided for simultaneous computer remote monitoring or settings access
using RS485 or a USB:RS485 interface.
The integrated data logger records up to 4000 test results internally, for use where a computer cannot be
permanently connected.
Simple switched inputs and alarm outputs are provided as alternative means of controlling the testing and
signaling the results. The "full colour’’ front panel led provides a basic indication of the cleanliness level.
The instrument uses the light extinction principle whereby a specially collimated precision LED light source shines
through the fluid and lands on a photodiode. When a particle passes through the beam it reduces the amount of
light received by the diode, and from this change in condition, the size of the particle can be deduced.
4.1 Benefits
− Live real time monitoring
− Manual, automatic and remote control flexibility
− Moisture and temperature sensing
− Multicolour LCD and LED for clear visual indication of any faults and alarms
− Instant result download on USB versions
4.2 Product features
4.2.1 Moisture Sensor
CMS-W models measure water content using a capacitive RH (relative humidity) sensor. The result is expressed as
percentage saturation. 100% RH corresponds to the point at which free water exists in the fluid, i.e. the fluid is no
longer able to hold the water in a dissolved solution. This is also normally the point at which damage occurs in a
hydraulic system, so is an ideal measurement scale that is independent of the fluid characteristics.
The water saturation point (100% RH) is temperature dependent, so the temperature is measured at the same
time. This enables results to be compared meaningfully.
The temperature measured is that of the fluid passing through the unit. Note this may differ from that of the
hydraulic system, depending on flow rate, pipe length and ambient temperature. It is not intended to be an
accurate indication of system temperature, but to provide a reference for the RH measurement. Nevertheless
experience has shown the temperature measured is within a few degrees of that of the hydraulic system, in most
applications.

12
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
4.2.2 Data Logger
The CMS includes a built-in data logger, which adds the facility to log and timestamp test results locally within an
internal memory, even when not connected to a computer.
− Test logging is determined by the log settings (see section 6.3.3).
− Each log entry is time-stamped and contains the CMS serial number, so that it can be identified later.
− The CMS memory has space for around 4000 log entries. When full, the oldest log entry is overwritten.
See section 6.3.1 + 6.3.2 for details of how to download the test log via bespoke windows based software.
4.2.2.1 Data Transfer via USB Stick
The U version of the CMS allows direct download via a USB memory stick. With the CMS powered up, plug the
USB stick into the USB connector at the top of the unit.
The screen / indicator will turn yellow briefly as it writes the test records to the USB stick. When complete, it will
turn green and the stick can be removed. If there is a problem with the data transfer (stick full or corrupt or not
recognised) then the screen / indicator will turn red. If this happens the operator can remove the stick and try
again with an alternative.
The USB stick provided with the unit is pre-formatted for the transfer. Other USB sticks may need to be reformatted (FAT32).
PLEASE NOTE: The USB option is not to be used for anything other than a memory stick
for results download. Any subsequent use other than that intended may cause damage
to the device

13
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
5 Technical Specification
5.1 Performance
Technology LED Based Light Extinction Automatic Optical Contamination Monitor
Particle Sizing >4, 6, 14, 21, 25, 38, 50, 70μm
Analysis range ISO 4406: Code 0 to 25
NAS 1638 Class 00 to 12
AS4059 Rev E Table 1 & 2 Sizes A-F: 000
Please Note: (Lower Limits are Test Time dependent)
If system cleanliness is expected to be above 22/21/18 or approx. NAS 12
Calibration Each unit individually calibrated with ISO Medium Test Dust (MTD) based on ISO 11171,
on equipment certified by I.F.T.S. ISO 11943
Moisture & Temperature Measurement % saturation (RH) and fluid temperature (°C) – Mineral Oil /
Diesel version only
Accuracy ±½ ISO code for 4, 6, 14μm
±1 code for 21, 25, 38, 50, 70μm
±3°C
±3%RH
5.2 Electrical Interface
Supply Voltage 9-36V DC
Supply Current 12V 24V 36V
150mA 80mA 60mA K version
70mA 40mA 30mA NON- K version
Power Consumption 2.2W max
Test Time Adjustable 10 - 3600 seconds (factory set to 120s)
Data Storage Approximately 4000 timestamped tests in the integral CMS memory
Keypad & LCD 6 keys, 128x64 pixels, back-lit graphical display
Communication RS485
Options MODBUS
CANBUS
4-20mA
5.3 Physical Attributes
Dimensions 123mm (H) x 142mm (W) x 65mm (D)

14
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Mounting 2 holes Ø7mm 126mm apart
Weight 1.6kg
Connections G1 M16x2 hydraulic connection
G3 ¼” BSPP Female Port
G4 7/16 UNF Female Port
Seal Material M/N Version – Viton (contact RMF Systems for any fluids that are incompatible with Viton
seals
S Version - Perfluoroelastomer

15
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
5.4 Fluid Characteristics
Fluid compatibility M version - mineral oils, synthetic fluids and diesels
N version – water based/ subsea fluids & M version fluids
S version – Aerospace phosphate esters, Skydrols® and N & M version fluids.
Viscosity ≤ 1000 cSt
Fluid temperature -25°C to +80°C
Operating Flow Rate 20-400ml/min

16
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Maximum Pressure 420barg static (For high frequency pressure pulse applications contact RMF Systems)
Differential Pressure Typically 0.5bar
5.5 Environment
Ambient working temperature -25°C to 80°C non K version / -25°C to 55°C K version
IP Rating IP66
IK Rating IK04
5.6 Wetted Parts List
M version
N Version
S Version
Copper Alloy C46400
Stainless Steel
Stainless Steel
Stainless Steel
Sapphire (Al2O3)
Sapphire (Al2O3)
Sapphire (Al2O3)
Viton
Perfluoroelastomer
Viton
PTFE
PTFE
PTFE
EPDM
FR4

17
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
6 Product Installation and General Operation
6.1 Installation
Each CMS supplied consists of the following:
− CMS
− Calibration certificate
− USB Stick which includes: Product User Guides, RMF-View software, accessory product drivers and product
brochures
− Pre-wired 3m cable
− Quick Start Guides
Optional Equipment:
− Circular connector pre-wired with 3m cable
− CMSRDU2 Remote display unit
− 500μm coarse screen filter
− CMSUSBi USB adaptor with pre-wired CMS cable
− CMSETHi RJ-45 adaptor with pre-wired CMS cable
6.1.1 Physical Procedure
− Decide on tapping points in hydraulic circuit
− Locate the unit mechanically and bolt to desired location using fixing holes provided. The CMS must be in a
vertical orientation, with the oil flowing upwards through it
− Wire back to junction box
− Check flow in acceptable range. There needs to be a differential pressure of more than approximately 0.5bar
placed across the CMS, such that a flow of fluid is generated within the range of the unit.
− If there is no suitable differential pressure available, then a flow controller will be needed. One solution is the
pressure compensated flow control valve. This limits the flow to around 200ml/minute for differential
pressures up to 400bar. This should be fitted to the drain side of the CMS (the top fitting).
− Fix mechanically
− Connect hoses or hard pipe from the system
− There must be no extra restriction placed in the drain hose. Do not have a pipe going to a restrictor to
control flow. Any such restrictor must be mounted directly to the CMS drain fitting.
(A)
− Fluid flow must be from the bottom fitting to the top, following the direction of flow arrow on the product
labelling i.e. the bottom fitting is the inlet and the top fitting is the outlet.
− Fit electrical connector, wire back to a junction box.
(A)
This is because any length of pipe between the CMS and a downstream restrictor can act as an accumulator.
Any pressure pulsations (for example from a pump) in the feed to the CMS are then translated into pulsations in

18
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
flow rate, sometimes leading to flow reversals in time with the pulsations. If the flow is very low this can sweep
the same particle backwards and forwards through the sensing volume multiple times, confusing the results.
6.1.2 Electrical Interface
RMF Systems’ separate CMS-USBi product is available for those wishing to have a simple plug and play solution
providing connection of the CMS to a computer. This section is for those wishing to do their own wiring to the
product.
6.1.2.1 Electrical Connectors
The CMS has two circular connectors located on the lower face of the unit. The USBi product can be connected to
either one depending on the installation configuration, see figure 6.1.
Pin
Colour
“Machine” Connector
“Remote” Connector
1
Yellow
RS485+/CANL/4-20mA(A)
RS485+
2
Pink
START INPUT
3 Green
RS485-/CANH/4-20mA(B)
RS485-
4
White
OUTPUT 1
5 Grey
I/O COMMON
6 Brown
OUTPUT 2
7 Blue
DC 0V
DC 0V
8
Red
DC +POWER
DC +POWER
6.1.2.1.1 Remote Connector
The ``remote connector’’ is intended for temporary connection of an external communication device e.g.
CMSUSBi so as to allow data download, remote control or diagnostics using the RMF-View software.
This is the circular connector furthest from the hydraulic connection, see figure 6.1.
This carries RS485 data and can also be used to power the unit temporarily in the event of a system being shut
down, thus no longer providing power to the unit.
This connector doesn’t send alarm signals as shown in the wiring diagram 6.7. If you require a USBI to send alarm
signals it has to be connected to the machine connector.
6.1.2.1.2 Machine Connector
The ``machine connector’’ is intended for permanent connection to the PLC / machine that powers the CMS
during normal operation. It has power connections, a start signal input, two relay outputs, and a data pair that
can be set to RS485, CANbus or 4-20mA signaling modes.
This is the circular connector closest to the hydraulic connection, see figure 6.1.
NOTE: If CANBUS or 4-20mA option has been selected, standard communication with an RS485 adapter (e.g.
USBI) on this port is no longer available.
The right hand port (remote connector) should be used if temporary connection is required.
NOTE: Start signal and relay outputs only apply to this connector.

19
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Figure 6.1 Connector Orientation
Figure 6.2 Machine Connector External Wiring Example
6.1.2.2 DC Power
DC power is connected to pins 7 and 8 of either circular connector (Red and Blue if using the pre-wired cable). All
the other signals are optional.
Item
Minimum
Maximum
Voltage
9V DC
36V DC
Current
200mA

20
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
6.1.2.3 Machine Connector - Serial Interface
An RS485 or CANbus interface can optionally be connected to pins 1 and 3 (yellow and green). This can be PLC
running customer software, or a PC with a RS485 adaptor running the supplied RMF-View software. To provide a
reference the RS485 0V connection should also be linked to the CMS 0V (as shown on figure 6.3).
The standard CMS control protocol is Modbus RTU. Modbus is a freely available open standard for industrial
control. Adapters are available to interface to other industrial control busses. The standard RMF-View software
from RMF Systems itself uses Modbus to communicate with the CMS, but it is also possible for customers to
implement their own controllers (section Modbus).
The CANbus protocol can also be used; see the CANbus section later in the manual.
Figure 6.3a PC Control Example
Figure 6.3b Modbus Controller Example
Figure 6.3a shows a single CMS linked to a PC, using a USB-RS485 adaptor. Figure 6.3b shows a slightly different
method. 100 Ohm termination resistors should be fitted as shown for long cables, for example over 10m. Twisted
pair wiring should be used for any length over 2m.

21
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Figure 6.4 Multi-Drop Network Example
Figure 6.4 shows how to connect two or more CMS devices to a multi-drop RS485 network. Any termination
resistors should be fitted to the network cable ends only. Spurs off the main RS485 bus should be kept as short as
possible, e.g. below 2m. Normally the pre-wired 3m cable available for the CMS would be used, with a junction
box to connect to the RS485 trunk. Either individual DC supplies can be used to power each CMS, or a single
supply run through the trunk cable.
Figure 6.5 Remote Display Unit Including PC Controller Example
Figure 6.5 shows how to connect the CMS-RDU Remote Display Unit. The RDU is used when the CMS location is
not convenient for an operator. It can control and monitor a remote CMS, as well as allowing an external
controller to be connected to it (for data download, for example).
6.1.2.4 Switched Input and Output Signals
The CMS has one switched input and two switched outputs. These can be used instead of, or in addition to, the
RS485 interface for command and control. The RS485 interface is more flexible but requires more software work
if RMF-View is not used (e.g. control from a PLC). An alternative is to control the CMS via these switched I/O’s,
either from a PLC or using a manual switch and indicators.

22
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Figure 6.6 Switched I/O Signals
In order to reduce wiring the input and outputs all connect together on one side (see Figure 6.6). However they
are optically isolated from the rest of the system so can be used to switch unrelated signals.
6.1.2.5 Start Signal
The "start signal’’ is an opto-isolated input that can be used to start a test, it can be used to ensure testing only
occurs when the hydraulic system is running. For example, the start signal could be wired to go on and off with
the main hydraulic pump or with a solenoid valve that allows fluid flow. That way the log does not fill up with
invalid tests that were carried out with no flow.
This could be from a push button or a PLC output. The input accepts AC or DC signals, typically derived from the
DC supply voltage. The exact function of this input is determined by the Test Mode setting (section tbc).
Item
Minimum
Maximum
Voltage
9V DC
36V DC
Impedance
10k Ohms
− When the START signal transitions from OFF to ON, the unit will start a new test or restart any test in
progress.
− At the end of the test, the state of the START signal is checked
− If the START signal is still on at the end of a test, another test is started. So that testing continues while
the START signal is held on.
− The switching off of the start signal will operate as a STOP command. That is, it will abort any test in
progress. It will continue to show and report the previous result.
− This new operation mode applies whether or not continuous testing is enabled.
− So for example if "continuous testing" and "stop testing when clean" are both enabled, and if the start
signal is being held on throughout testing, then EITHER the start signal vanishing OR a clean result can
terminate testing.

23
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
− This is not the same thing as the "start signal delimited test" option ("start signal defines test duration" in
user settings when enabled). This is for using the start signal to control the duration of each *single* test,
only.
Other ways to test are:
− From the CMS front panel START button, if fitted (K Keyboard option)
− Via RMF-View or PLC Modbus command
− Periodic automatic testing according to a programmed test mode
6.1.2.6 Alarm Outputs
These are opto-isolated switches that can be used to signal external indicators, PLC inputs or other equipment
(e.g. pump on/off control).
The exact function of these outputs is determined by the Alarm Mode setting (section 6.3.3.9).
The outputs are "voltage free’’ contacts that can switch AC or DC signals up to 36V nominal (60V absolute
maximum peak voltage).
Item
Minimum
Maximum
Voltage
36V DC
Current
0.5A
6.1.2.7 4-20mA Connection
See Figure 6.7 for a schematic.
The two 4-20mA outputs are sourced from the main supply voltage DC+. These may be connected to the 4-20mA
inputs of a process indicator or a PLC. The 0V connection is then also normally connected to the PLC 0V.
The 4-20mA outputs can be converted to 0-5V outputs by connecting a 250 ohm resistor between each output
and 0V. Similarly they can be converted to 0-10V outputs by connecting 500 ohm resistors.
For details of how the test results are represented by the 4-20mA signals, see section 6.4.3.

24
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Figure 6.7 4-20mA Example
6.1.3 Hydraulic Connection
1 High or Low Pressure Parallel Connection
Figure 6.8 CMS working pressure generated by hydraulic component

25
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
2 Low Pressure, Off-Line Operation
Figure 6.9 CMS working pressure generated by hydraulic component
3 Very Low Flow Systems
Figure 6.10 Entire system flow rate is within the range of the CMS
6.1.3.1 Flow Rate
For the majority of systems, a differential pressure of a few Bar will generate an in-range flow for a CMS
connected using two 1.5 meter lengths of microbore pressure hose. The required differential pressure can be
obtained by taking advantage of an existing pressure drop within the system. Alternatively one can be created by
inserting a check valve. The CMS can then be connected across this differential pressure source.
6.1.3.1.1 Detailed Calculations
In general the flow rate of fluid through the CMS needs to be kept within the range of the unit (see hydraulic
specification 3.2). The CMS measures the flow during operation, so this can be used to check that the flow is
correct.
A flow that is out of range will be indicated by a fault code (see section 7.2).
Note: Results taken with out-of-range flows are not logged.
The flow is entirely generated by the differential pressure between the ends of the pipes used to connect the
CMS. The pressure needed to generate an in-range flow can be estimated by assuming a target flow, and
determining the resulting pressure drop across the CMS and connection piping. Use Figure 6.10 on page 24 to
lookup the CMS pressure drop, and manufacturers’ data to lookup the piping pressure drop at the desired flow.
The sum of these two pressures is the pressure needed.
The user connects the CMS between two points in the hydraulic circuit that have this pressure difference.
In order to use the graph:
− Determine the working viscosity of the fluid, e.g. 30 cSt
− Decide on a desired flow rate. 200ml/minute is normally used since this is in the middle of the CMS flow
range. But 100ml/minute is also suitable and uses less oil

26
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
− Use the figure 6.11 to look up the pressure drop, across the CMS ports, at this flow rate and viscosity. E.g.
at 30cSt and 200ml/minute, this is 0.4 Bar. The maximum and minimum allowed differential pressures
can also be determined using the 400ml/min and 20ml/min lines, respectively.
− Determine the additional pressure drop caused by the piping used to connect the CMS. This may be
negligible for 1/4 inch piping and over, but is very important for microbore hoses. This information can be
found in the manufacturers catalogues. In the case of microbore hoses, at 30 cSt these have a pressure
drop of around 10 Bar per meter per lpm of flow. So a 2m total hose length would add a pressure drop of
2 × 10 × 0.2 = 4 Bar. (So in this case the pressure-flow relationship is mainly dependent on hose
resistance).
− Add the CMS pressure drop to that of the hoses, e.g. 4 + 0.4 = 4.4 Bar
When the required pressure drop has been found:
− See the figures at the start of this section for examples of where the CMS could be connected
− If there is a pair of connections in the hydraulic circuit that operates with a differential pressure near to
that calculated, then the CMS can be connected there
− Alternatively, create the pressure drop by modifying the hydraulic system. For example, insert a check-
valve in the circuit with a 4 bar spring. The "component’’ could also be a filter, a restrictor or even a piece
of piping if it has a suitable pressure drop across it.
− If none of these options is feasible, then an active flow controller will likely be needed, see 6.1.2.3.
− Otherwise connect the CMS across the points identified; taking care to maintain an upward flow of oil
through the unit (this reduces trapped air).
Of course in a real system the pressure and viscosity will vary with temperature and operating conditions. But
since the working flow range of the CMS is very wide, this should not be a problem provided it remains within
range. On the graph the area between upper and lower lines represents the usable operating region for the CMS,
with the middle line being ideal. The differential pressure and the viscosity can vary from the ideal, provided the
system stays within the upper and lower lines. This ensures the flow stays within the working range of 20 - 400
ml/min. It can be seen that the unit will accommodate a 20:1 variation in either viscosity or differential pressure
during operation.

27
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Figure 6.11 Differential Pressure vs Fluid Viscosity, for various flow rates
6.1.3.2 Manual Flow Control
Another possibility is to fit a simple manual flow control (flow restrictor) to the outlet of the CMS.
− This should only be done where the available pressure is less than twice the maximum value calculated. This
is because the small orifice size needed to control the flow from a pressure larger than this has a risk of
blockage.
− The flow controller must be fitted to the outlet only. If fitted to the inlet it will have a filtering effect.
− The flow controller must be fitted directly to the CMS outlet port.
6.1.3.3 Active Flow Control
This is only needed for operation at high differential pressures, where a too-high flow would otherwise be
generated.
A pressure compensated flow control valve is fitted to the CMS drain outlet. This has the effect of a ``flow
limiter’’, maintaining a constant flow rate even with a varying inlet pressure (provided this pressure stays above a
minimum working value). Below this pressure the valve is wide open so has little effect, i.e. the flow will be less
than the 200ml/min controlled value. This ``minimum working value’’ will be typically 5-10 bar but will vary with
viscosity. For these lower pressures a flow control valve is not needed and other methods are better used to
control flow as previously described.
Figure 6.12 CMS flow actively regulated
6.2 General Operation
6.2.1 Physical Checks
• Oil leaks on and around the unit
• Fatigue in hoses and pipework that might then leak when under system pressure

28
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
6.2.2 Front Panel Operation
6.2.2.1 Status LED
All CMS versions have a multi-colour indicator on the front panel, which is used to indicate the status or alarm
state. CMS-K versions also have a screen that changes colour. The alarm thresholds can be set from RMF-View via
the serial interface.
Figure 6.13 Front panel of K version (left) and Non-K version (right) CMS 2
Colour
Shows
Green
Indicates that the test result has passed, i.e. none of the alarm thresholds were
exceeded
Yellow
Indicates that the lower cleanliness was exceeded, but not the upper one
Red
Indicates that the upper cleanliness was exceeded
Blue
Indicates that the upper water content limit was exceeded
Red/ Blue Alternating
Indicates both cleanliness and water content upper limits exceeded
Violet
Indicates that the upper temperature limit was exceeded
Red Flashing White
Various fault codes can be indicated by the LED turning red and then flashing
white a number of times (Section 7.2.1)
Please note: If the codes seem confusing, note that a given colour will only ever be seen if the corresponding limit
has been specifically set by the user. So for example if a maximum temperature limit has not been set, the violet
indication will never be seen. If all that is wanted is a "green or red’’ light, that can be arranged by simply setting
only the cleanliness threshold maximum limit.
If the upper temperature alarm is set, this takes priority over the Contamination and Water alarms. In the event
of an over temperature condition, the LED will turn violet only, whether or not there is also a contamination or
water alarm condition. The rationale is that an over-temperature condition could be immediately catastrophic for
the hydraulic system.

29
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
6.2.2.2 Front Panel Operation
6.2.2.2.1 Result Display
CMS-K models have a 6 button keypad and a small graphical LCD. This allows the display of the test result (current
cleanliness level, with water content and temperature if applicable).
The graphical format allows a full display of all codes of the standards supported.
The unit powers up in "Display Mode’’. This displays the test result in the selected format. The table below shows
those available.
The screenshots in the right column are the "detailed’’ version of the display additionally showing the particle
counts and flow rate. The particle sizes and count representation are automatically matched to the selected
format.
Format
Simple View
Detailed View
ISO4406:1999
NAS1638
AS4059E Table 1
AS4059E Table 2
ISO11218
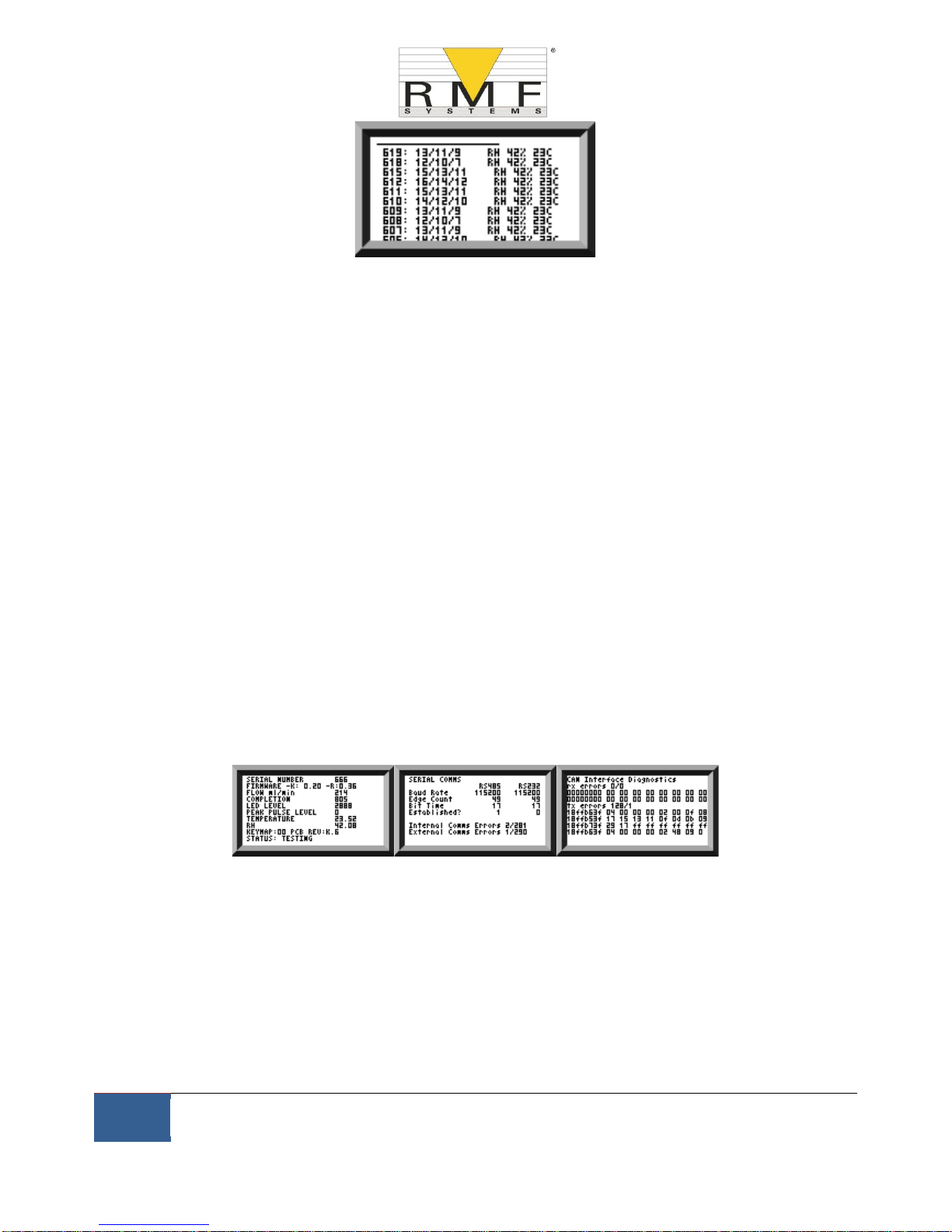
There is also a ``History’’ screen which shows the last 10 results.
The operator can switch between these screens using the ▲ and ▼ keys.
30
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Figure 6.14 History Screen
The progress of a test is denoted by the horizontal line; it grows from left to right as the test progresses. When it
reaches the right hand side a new result is generated.
6.2.2.2.2 Diagnostics Display
Press ◄ or ► to show the diagnostics displays (used when diagnosing problems) shown in figure 6.15. Then
switch between the diagnostics screens using the ▲ and ▼ buttons.
Completion shows a number from 0 to 1000, indicating the test progress.
FLOW ml/min provides an approximate indication of flow rate, updated after each test.
NOTE: This is not a calibrated flow meter and is for indicative purposes only.
This can be helpful when installing the unit or checking operation, to ensure that the flow rate is within the limits
of the unit. The other items are mainly of use to assist in support when reporting problems.
The STATUS line shows the current state of the unit. Any errors such as LOW FLOW will also appear here
(corresponding to the front panel LED fault codes).
The second screen shows diagnostics relating to Modbus serial communications traffic. External Comms Errors
are those between a connected PC and the CMS. Internal Comms Errors are internal to the unit, showing
communications between the CMS keyboard/display circuit board and the sensor itself.
The third screen shows diagnostics related to CAN bus communications.
General Modbus CAN Bus
Figure 6.15 Diagnostics Screens
6.2.3 CMS removal and Product Maintenance
When removing the CMS from the system ensure the system pressure is shut off from the CMS.
Blockages
− If a suspected blockage occurs then flush system fluid in the reverse direction of the CMS.
− If this doesn’t solve the problem then try using Iso-Propyl Alcohol or Petroleum Ether, flushing in the
standard and reverse flow direction.

31
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
− If this doesn’t solve the issue then send to RMF Systems for investigation.
6.3 CMS Control
The CMS can be controlled using the remote control facility included in the RMF-View software package, installed
on a computer. Alternatively customers can use their own computer software.
Since the CMS includes a built-in data logging memory, operators can make use of the remote control facility in
one of two ways:
− Direct Online Operation
The CMS is permanently connected to a computer while tests are carried out. The operator can set parameters,
type a label and initiate the test. They can then monitor the progress of each test. Each test result is displayed and
downloaded into the test database as it is completed.
− Disconnected Operation
Here the CMS operates as a standalone item, performing tests on a schedule or under external command from a
control system. If a permanent record of the results is needed, an operator can connect a computer and use RMFView to download the accumulated test data. The CMS can hold up to 4000 tests in the memory.
6.3.1 Computer Connection
The connection is made using an RS485 adaptor connected to the computer or control device.
The CMSUSBi is included as a pre-wired solution for USB (all modern laptops and PCs). Make the connection, start
RMF-View running and then apply power to the CMS.
Figure 6.16
To access the Remote Device facility in RMF-View, press the Remote Control button (Figure 6.17) on the toolbar.
The Connect dialogue will then appear (Figure 6.18).

32
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Figure 6.17
Figure 6.18
The first time that this is done, the correct communications port (COM port) on the computer has to be selected,
as detailed below.
− The program scans the computer for available ports, and puts them in a list to choose from - this list is in the
box above the Connect button. Press the arrow on the right hand side of this box and choose the connection on
your computer.
− All working communication ports of the computer are available for selection. Select the one used to connect the
CMS, and then press OK. If you are unsure which port is correct, the device name should be next to the COM port
number. When communication has been established successfully, the remote control dialogue will appear. After a
successful connection, the COM port will be remembered for next time and will appear preselected in the
dialogue. If no COM ports appear, please refer to the fault finding section the manual (7.2).
6.3.2 PC Software Operation
The Remote Control dialogue allows an operator to manually control the CMS from a laptop, using the RMF-View
software. It can also be used to download test results that have accumulated during autonomous (disconnected)
operation.

33
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Figure 6.19
To perform a test, first optionally edit the Test Reference and press Apply to register the new value. This is a
descriptive label which can be used to identify or group the test later (along with the test number and test
time/date). An example would be a machine number or customer name. The Test Reference can be up to 15
characters in length.
When connected the CMS status should show "Ready". The operator can then press the Start button to begin the
test. The progress bar shows how much of the test has been completed.
The test can be abandoned at any time by pressing the Stop button. If the Start button is pressed during a test,
then the current test is abandoned and a new one started. When the test has finished, the Result area will display
the contamination level in the set format and water content and temperature (if applicable).
After a test the Test Number is automatically incremented and the status of the test is displayed. If the status is
Ready then the operator can press the Start button again to begin a new test.
It is also possible to configure the CMS to automatically begin another test, after an optional delay. In this case
the status will be Testing or Waiting.
The CMS incorporates a data logger, so previous test results can be downloaded into the test database using the
Download New and Download All buttons. The difference between these is that Download New only transfers
results that have never been downloaded before. Download All transfers all results that are stored in the CMS.
Erase Log deletes the test results from the memory of the CMS, see figure 6.19.
When the user has finished operating the CMS the dialogue can be dismissed using the close control (the "X" at
the top right corner of the dialogue) or by pressing the Esc key. Pressing the Settings... button brings up the
Remote Device Settings dialogue.
6.3.3 Settings
The CMS can be reconfigured using the Remote Device Settings dialogue. This is normally done as part of the
installation or commissioning process.
After making any changes, pressing the OK button will update the CMS with the new settings. Or press Cancel to
leave the settings as they were.

34
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Figure 6.20
NOTE: The CMS has been designed to be a very flexible product, so has a wide range of settings and operating
modes. However the shipped defaults are suitable for most applications and many users can skip this section.
Actual operation is straightforward even when advanced settings are used during initial configuration.
NOTE: Some items may be missing depending on the options fitted to the CMS.
6.3.3.1 General
Some general information about the connected CMS unit is available. The Identification shows the CMS serial
number and software version. The serial number, together with the test timestamp, uniquely identifies the test
record. These two parameters are the ones used to avoid duplication of test records.
Current Time shows the time set on the CMS. It is important that this is correct since this is used to timestamp the
tests. Pressing the Set button automatically synchronizes the CMS time to that on the computer.
The calibration area displays the date last Calibrated and the next Calibration Due date.
6.3.3.2 Test Number
The Test Number can be used to help identify a test within a sequence. However it is automatically reset when
the CMS is powered up, so instead relying on the timestamp (date and time of test) and test reference is
preferred.

35
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Figure 6.21
NOTE: if the CMS is power cycled at any point then the test numbering sequence automatically resets and begins
again.
6.3.3.3 Test Duration
The length of the test is controlled by the Test Duration, see figure 6.21 for location.
The factory set value of 2 minutes is suitable for most applications, but the user is free to set a different value.
Shorter times will make the CMS more responsive to short-term fluctuations in contamination level. It will also
result in less consistent results for the large particle sizes and clean systems, due to statistical fluctuations in the
number of particles counted.
Longer tests will allow more "stable” results in very clean systems and for the larger particle sizes, since there will
be a larger total number of particles counted during the test. This means that any fluctuations have less of an
effect on the test result.
6.3.3.4 Result Display
Use the selector to choose the preferred display Format (ISO, NAS etc.). This selection is not just cosmetic since it
also determines how the cleanliness alarm targets are to be interpreted, if these are used. See figure 6.21 for the
location, it is defined as the format.
6.3.3.5 Simulated Test
This setting can be used when there is no flow available but communications need to be tested. This is the box
ticked in figure 6.22
Figure 6.22
6.3.3.6 Low Flow Alarm Disabled (Clean Systems)
− It is worth reinforcing that the primary function of the product is to produce a measurement of
cleanliness, and not act as a flow meter. If the unit produces a contamination measurement, then the
flow rate is sufficient enough for it to do so.

36
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
− The CMS needs particles to pass through the flow cell to calculate flow, the dirtier the system is, the more
statistically accurate the flow output becomes.
− Conversely, when placed on a very clean system the unit can have difficulty in working out the flow due
to the very low number of particles passing through the flow cell.
To overcome this, the test has to fulfil certain conditions to create a valid result.
It the low flow alarm has been disabled there must be a minimum of 20 particles >4micron seen during
the test for the flow reading to be shown and the test result to be valid.
If there are less than 20 particles >4micron during the test then the CMS will alarm/fault code even if the
low flow alarm has been disabled.
Note: If the low flow alarm has been disabled, it is preferred that the CMS is installed in such a way that if
the system is shutdown (zero flow) the CMS is also shut down so as not to measure stagnant fluid and
provide erroneous readings.
− It may be necessary that the low flow indicator is turned off if filtration is below 10um (ISO 14/12/10 (NAS
Class 4)), see figure 6.22 for location.
6.3.3.7 Continuous Testing
Figure 6.23
In the Continuous Testing area are settings which control how the CMS decides when to perform and log a test.
Selecting Test Continuously makes the CMS automatically repeat the test, according to the specified Test Interval.
a) Setting an interval longer than the test duration; results in the test being repeated upon each expiry of
that interval. For example, setting a Test Duration of 1 minute and a Test Interval of 10 minutes, results in
a 1 minute test performed every 10 minutes.
NOTE: Test time is part of interval time
b) Setting the interval to a value less than the Test Duration (for example zero); results in a new test being
started immediately after a test finishes.
Log Continuous controls whether tests are logged during continuous testing. This is to avoid the test log being
cluttered by potentially large numbers of unwanted test results. If Log Continuous is not selected, then only the
"final" test in a sequence is logged (see Alarm Modes section and "Stop Testing When Clean" below).4

37
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
If continuous logging is used, then the Log Interval can be set to control the proportion of tests that are actually
logged. For example the CMS could be set to test every 10 minutes, but only log a result hourly. The log interval,
test interval and test duration are distinct parameters that work together to control the test and data logging. So
that, a test duration of 2 minutes, a test interval of 10 minutes, and a log interval of 1 hour could be individually
set. This would result in 2 minute long tests, repeated every 10 minutes, with a test logged hourly.
NOTE: the log interval must land on a test interval or an error will occur, for example the test interval cannot be 2
minutes and the log interval 3 minutes.
Stop Testing When Clean- This is a feature intended for cleaning rigs or "filter trolley" type applications. The CMS
continues testing until the fluid is "clean", at which point an alarm is signaled and testing stops.
Ignore Initial Tests- on start up the number selected here is the number of tests that are ignored before results
are logged. This is designed for systems that are particular dirty or turbulent on startup and it allows the system
to stabilize.
Confirm Target Level before Stopping- this helps to ensure that a test sequence is not terminated too soon, when
there are still a few large particles in the system. When selected, the number in the box is how many successive
"clean" results are needed before testing halts.
4
This feature is intended for a "Filter Trolley" type application where system runs a pump until the oil is
sufficiently clean. Typically only the final "clean" result requires logging.
6.3.3.8 Changing Communication Protocols
Figure 6.24
Selecting the communication button allows you to change how the CMS communicates. See figure 6.25 for the
options.

38
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Figure 6.25
Selecting a machine interface fixes the output for the machine connector, for example selecting CANbus means
that you can no longer use the machine connector to communicate in Modbus (the default). If you wish to change
back or to a version of 4-20mA then you have to connect to the CMS via the Remote Connector.
See section 6.4 for information on how to communicate with the CMS in the different protocols.
6.3.3.9 Alarms
The CMS has two switched "alarm" outputs that can be used to signal external equipment in various ways,
according to the test results and the alarm settings. There is also a multi- colour front panel light which indicates
how the result compares to the set alarm thresholds.
The alarm settings are comprehensive and flexible, allowing the CMS to be used in many different scenarios.
6.3.3.9.1 Alarm Levels
The various alarm thresholds are set in the Contamination Code Target / Alarm Levels area of the dialogue.
Alarms can be set on combinations of cleanliness codes, water content and temperature. The available codes, and
their interpretation, vary according to the set test Format. For example it is possible to set a threshold of "NAS
11" or "ISO 18/16/15" or "AS4059E 8B-F", etc.
In general there are upper and lower limits that can be set for the cleanliness level, also for water content and
temperature if applicable. An alarm, if enabled, will become active if any of the associated (upper/lower) limits
are exceeded. However if a field is left empty (blank) this is interpreted as a "don’t care" setting.
In the example Figure 6.21 the Upper Alarm is exceeded if the 4μm count is greater than ISO code 23, or the 6μm
greater than ISO code 22, or the 14μm count greater than code 18, or the water content is greater than 80% RH,
or the temperature is greater than 65°C. The lower alarm is never triggered since all the settings are empty.

39
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Figure 6.24
ISO4406:1999 Alarm Levels
ISO4406:1999 represents cleanliness using codes for the number of particles greater than 4, 6 and 14µm. These
codes can be used as limits for the alarms by selecting the ISO4406:1999 test Format and then entering values as
required. As an extension to ISO4406:1999 it is also possible to specify codes for the other measured sizes too. If
this is not needed then the entries can be left blank.
NAS1638 Alarm Levels
Figure 6.25
NAS1638 can be used by selecting this as the test Format. The headings and boxes for the available settings
change appropriately. NAS1638 represents the overall cleanliness level as a single code, this being the highest of
the individual codes generated for each defined particle size. Hence we have the option of setting a limit on this
overall contamination class (the Basic Class), or we can set individual limits on any combination of the classes for
the defined particle size ranges.
AS4059E Table 2 Alarm Levels
Figure 6.26

40
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
AS4059E Table 2 uses letters instead of numbers to indicate the particle size range, so the settings are labelled
appropriately. The standard specifies ways to represent a cleanliness level using only a subset of the available
particle sizes, for example B-F. The user can achieve this by only entering settings for the sizes desired, leaving the
others empty. So a limit of AS4059 7B-F could be represented simply by entering a value of 7 for B, C, D, E and F.
AS4059E Table 1 / ISO11218 Alarm Levels
Figure 6.27
These two standards are similar except for terminology and reporting format. The actual numeric sizes and class
thresholds are the same.
6.3.3.9.2 Alarm Mode
Figure 6.28
The Alarm Mode sets the precise function of the two switched alarm outputs of the CMS.
This allows the CMS to be used in a variety of situations. Note that the conditions under which the outputs are
turned on are also displayed above the Alarm Mode selector, for each setting.
NOTE: These outputs are distinct from the front panel LED, and that the set alarm mode does not affect the LED.
The set alarm mode determines the function of the two switched outputs only. This setting and this entire section
can be ignored if these outputs are unused, i.e. the user has not connected them to anything.
New modes are occasionally added after a customer request, this means that modes may not all be implemented
unless using the latest firmware revision.

41
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Alarm Mode 0: Warning-Alarm
Output 1
Output 2
Turns on When
>Lower
>Upper
Intended Function
Warning
Alarm
This allows the CMS to switch external warning lights or alarms. Output 1 is the "Warning’’ output, switching on if
any of the Lower limits are exceeded. Output 2 is the "Alarm’’ output, behaving similarly for the upper limit.
Alarm Mode 1: Clean-Dirty
Output 1
Output 2
Turns on When
≤Lower
Upper
Intended Function
Clean
Dirty
This could be used in a cleaning system that attempts to maintain a cleanliness level by switching a pump on and
off.
Output 1 is the "Clean’’ output, coming on when the result is less than or equal to the lower ("Clean’’) limit. This
could be used to stop a cleaning pump.
Output 2 is the "Dirty’’ output, coming on when the result is greater than the upper ("Dirty’’) limit. This could be
used to start the cleaning pump.
Alarm Mode 2: Green-Amber-Red
Output 1
Output 2
Turns on When
<Upper
>Lower
Intended Function
Green
Red
This mode encodes the result in such a way that the internal alarm relays can be used to drive an external remote
3-colour LED indicator. This is a special type of LED containing both red and green emitters, which could be
mounted in a control panel. This external LED will then turn green / amber / red according to the test result – in a
similar way to the built-in one. Output 1 ("Green’’) is turned on when the result is less that the upper limit.
Output 2 ("Red’’) is turned on when the result is greater than the lower limit. If the result is in between, both
outputs are turned on and the LED colour will be amber (i.e. a mixture of red and green light).
Alarm Mode 3: Particles-Water
Output 1
Output 2
Turns on When
Cleanliness>Upper
Water>Upper
Turns off When
Cleanliness ≤lower
Water ≤lower
Intended Function
Cleanliness Alarm
Water Alarm
This is used when separate alarm outputs are needed for particles (cleanliness) and water content.
This mode is able to use both upper and lower limits such that the outputs have ``hysteresis’’. If only the upper or
lower limit is required, then both upper and lower limits should be set to the same value.
Alarm Mode 4: Continue-Clean
Output 1
Output 2
Turns on When
>Lower
≤Lower
Intended Function
Continue Testing
Stop Testing / Clean
This is used for a "cleaning" application where a signal is needed to stop testing (for example to stop a pump or
signal an external controller).

42
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Alarm Mode 5: Tested Not-Clean
Output 1
Output 2
Turns on When
Test Complete
>Lower
Intended Function
Test Complete Signal
“Not Clean” Signal
This is used when controlling tests from a PLC using switched outputs. The PLC gives a start signal, then monitors
the "Test Complete’’ output. If the test has failed it can detect this with the "not clean’’ signal.
``Continuous testing’’ should not be selected for this mode.
Alarm Mode 6: Testing Not-Clean
Output 1
Output 2
Turns on When
Testing
>Lower
Intended Function
Test in progress Signal
“Not Clean” Signal
This is similar to mode 5 above. The difference is that output 1 is active during the test and turns off at test end.
``Continuous testing’’ should not be selected for this mode.
Alarm Mode 7… Customer Requested Modes
Other alarm modes will be defined as and when customers request them.
6.4 Standard Communication Protocols
6.4.1 Modbus
The CMS can be controlled via commands on its serial (RS485) interface, using the Modbus RTU protocol. It is
possible to control every aspect and setting of the CMS, as is done by the RMF-View control software. All results
and counts are available in all supported formats. We suggest using RMF-View to initially configure the CMS and
check it is performing correctly, and then the customer-written software only has to read the test results. This
could be used to integrate the CMS measurements with a general machine control, vehicle control or factory
monitoring system.
Customers wishing to implement their own Modbus controller software will need to refer to the rest of this
section with further details in section 11.1 and 11.2.
The simplest arrangement is to configure the CMS to test continuously, with a set interval between tests.
For example; a Test Duration of 2 minutes and a Test Interval of 10 minutes.
The Start Testing Automatically selection can be used so that the unit does not require a start signal.
Then, the most recent test results can be read from the appropriate Modbus Registers.
Register
Function
56
4μm Result Code
57
6μm Result Code
58
14μm Result Code
43
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
6.4.1.1 Set Up
Protocol Type
RTU (not ASCII)
Data Bits
8
Stop Bits
1
Parity
Required, Even or none
Baud
Auto-sensing 1200-115200
Signaling
RS485
Node Address
4 (or user set)
Figure 6.29 Settings
6.4.1.1.1 Communications Check
You should be able to read the product ID code from register 0 (from Modbus node address 204). The product ID
code is the value 54237 (decimal) or 0xD3DD (hexadecimal).
6.4.1.1.2 Result Format
The CMS can present results in several different industry formats (ISO, NAS etc.) The format required can be most
easily set using RMF-View; however it is also possible to set it via Modbus. To do this, write the required value 0-4
from table 6A to the TEST FORMAT register 19. The factory set value is 0 (ISO 4406:1999).
The selected format does not affect the particle count values, but does completely change the interpretation of
the result codes and set limits, if used.
Note: If the format is changed, then any set alarm limits must be changed too since these will refer to the old
format. E.g. a limit of ``NAS 11’’ cannot be directly expressed using the ISO4406 standard.
Value
Format
Main Class Example
Individual Codes Example
0
ISO 4406:1999
21/20/17
1
NAS 1638
NAS 12
(12 11 11 7 6)
2
AS4059E Table 2
12A-F
12A/12B/11C/11D/7E/6F
3
AS4059 Table 1
Class 12
12 11 11 7 6
4
ISO 11218 Draft
ISO (12)
12 11 11 7 6
Table 6A TEST FORMAT Register 19

44
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
6.4.1.2 Result Codes
The most recent measurements are presented as numeric codes (i.e. numbers) according to the selected TEST
FORMAT. These codes can be read from registers 56-63, as per Table 6B.
Register
ISO 4406 Code
AS4059E Table 2
Class
NAS1638/ AS4059E Table 1/ ISO
11218 (Draft) Codes/ Classes
56
≥4µ
Basic
Basic
57
≥6µ - -
58
≥14µ
A
5-15
59
≥21µ
B
15-25
60
≥25µ
C
25-50
61
≥38µ
D
50-100
62
≥50µ
E
100+
63
≥70µ
F
Table 6B RESULT CODES Registers 56-63
6.4.1.2.1 Null Values
For all formats, the special value -32768 (0x8000 hex) is used to represent a ``null’’ or ``no result’’ condition. This
enables ``No Result’’ to be distinguished from a 0/0/0 ISO code, for example. ``No Result’’ could be due to an
error condition, or to a measurement not having been commanded yet. This convention is also used for other
parameters such as temperature and water content measurements, where applicable.
NOTE: User written programs should take note, to avoid displays like -32768/-32768/-32768 appearing on their
front panels.
6.4.1.2.2 ISO4406
ISO 4406 defines a set of code values to represent ranges of counts of particles greater than the nominated sizes
of ≥4, ≥6 and ≥14μm(c). The CMS can display codes from 0 to 24. The three-part code is available in the first 3
RESULT CODES.
We additionally make available equivalent codes for the other sizes from 21 to 70μm(c), as per Table 6B.
6.4.1.2.3 NAS 1638/ AS4059E-1/ ISO11218
These assign code numbers for the particle counts in each size range shown in the table. The ``basic’’ class is then
the highest of these individual codes. The basic class is in the first register, with the individual classes made
available in the registers shown.
For these standards there is a complication in that they all define an additional class ``00’’. This is an extra
``cleaner than class 0’’ class. We distinguish this from 0 using the numeric value -1. Negative numbers are
represented in a Modbus register using the ``twos complement’’ notation. If the user program interprets this as a
positive number it will appear as 65535 (0xFFFF hex).
Classes range from 00(-1) to 12.

45
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
6.4.1.2.4 AS4059E-2
AS4059E Table 2 also has some similarities to NAS1638. In terms of the representation in Modbus registers, the
main differences are an extra 4-6μm(c) size range and the addition of an extra ``000’’ class. This is represented
using the number -2. If the user program interprets this as a positive number it will appear as 65534 (0xFFFE hex).
6.4.1.2.5 Temperature and Water Content Measurements
These are contained in the TEMPERATURE register 33 and the RH (relative humidity) register 34. These are scaled
by a factor of 100, so that values of 12.34°C and 56.78% RH would be represented by values of 1234 and 5678
respectively. The temperature can go negative, in which case the usual ``twos complement’’ representation is
used. Most controllers should have a facility for reading ``signed integers’’ encoded in this way (these will appear
as large positive numbers if interpreted instead as positive numbers, for example 65535).
The special value -32768 (0x8000 hex) is again used to indicate ``No result’’, as per the contamination result
codes. This could be due to a sensor failure or to the unit still in the process of powering up.
6.4.1.3 Performing Tests
6.4.1.3.1 Commanding Test Start
If the CMS is monitoring a single machine, it will normally be configured to test continuously and automatically, so
that the contamination measurement can be read out at any time as described above. However some
applications need a defined test start and test end, for example end-of-line production testing, where each result
relates to a separate item being tested.
These applications can simply use a push button (or relay) wired to the CMS start signal, or the front panel push
button, or can be commanded programmatically via Modbus.
To start or restart a test, write the value 1 to the command register 21. The test duration can be set using RMFView before installation, or alternatively write the required test time (in seconds) to the TEST DURATION register
18.
6.4.1.3.2 Test Status
A test status code is available in register 30. This contains a number indicating the current state of the CMS,
according to section 7.2.2, table 7A. This allows a system to remotely monitor the CMS operation, if desired,
allowing more specific diagnostics.
NOTE: the fault conditions are also indicated on the front panel LED, while ``No Result’’ in the case of a fault is
indicated using special result values as previously described.
6.4.1.3.3 Test Completion
The TEST COMPLETION is indicated by register 36. This contains a number between 0 and 1000 indicating the test
progress (this is also used by RMF-View to drive the test progress bar).
6.4.1.4 Particle Counts
Some quantities are (or may become) too large to fit into a single 16-bit register. For example the 4μm particle
count could easily be more than 65535. These items are represented using two consecutive registers; the

46
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
combination makes up a 32-bit integer. For example, the value of such a 32 bit unsigned integer stored in the two
registers 40 and 41 may be calculated using the formula:
𝑣𝑎𝑙𝑢𝑒 = (65536 × (𝑟𝑒𝑔𝑖𝑠𝑡𝑒𝑟 40)) + (𝑟𝑒𝑔𝑖𝑠𝑡𝑒𝑟 41)
The particle counts are stored in registers 40-55, as shown in Table 6D. There are 8 register pairs; each pair
encodes one count channel as a 32 bit integer, using two consecutive Modbus registers as explained above. The
Counts are per 100ml.
Particle sizes are expressed below according to ISO4406:1999, i.e. equivalent projected area diameter. The sizes
have been chosen so that all supported coding standards (NAS, ISO...) can be derived from them. The counts are
all cumulative.
Differential counts can be derived by subtraction. E.g., the NAS 5-15μm count could be calculated by subtracting
the ISO 6μm(c) count from the 14μm(c) count.
Number
Function
Comment
40-41
≥4µm (c)
42-43
≥6µm (c)
≥5µm (NAS)
44-45
≥14µm (c)
≥15µm (NAS)
46-47
≥21µm (c)
≥25µm (NAS)
48-49
≥25µm (c)
50-51
≥38µm (c)
≥50µm (NAS)
52-53
≥50µm (c)
54-55
≥70µm (c)
≥100µm (NAS)
Table 6D Particle Count Registers
6.4.1.5 Alarms
6.4.1.5.1 Alarm Mode
The CMS includes two relay outputs that can optionally be used for signaling the state of the unit. These are
normally used in ``stand-alone’’ applications where the Modbus interface is not used (since a Modbus controller /
PLC already has all the exact results available in digital form and can work with these directly.)
There are a number of preset ``modes’’ that determine the exact function of the relays. Refer to the alarm mode
section for more details (6.3.3.9.2).
These modes are normally set at installation time using our PC software package RMF-View. But it is also possible
to use Modbus to set the operating mode of these relays, by writing the corresponding integer to the alarm mode
register 26.
6.4.1.5.2 Alarm Limits
Settable Upper and Lower limits for particulate contamination are provided.
These are two groups of 8 registers representing the ``Upper Limit’’ and ``Lower Limit’’ for particulate
contamination. These are 64-71 and 72-79 respectively.
These are expressed in terms of the result codes using the same format as in 6.4.1.2. An additional special value
of 0x8000 (hexadecimal representation) is used to signify a ``don’t care’’ setting for that limit code.
6.4.2 CAN-bus
The CMS supports the major CAN-bus basic message format standards CAN 2.0A (11 bit identifiers) and CAN2.0B
(29 bit identifiers).

47
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
J1939 and CanOpen are higher level protocols built on these basic standards. J1939 uses CAN2.0A, and CanOpen
uses CAN2.0B. The CMS does not implement either of these protocols. Instead it defines a few CAN-bus messages
to communicate data. However the message identifiers have been chosen so as to allow operation with both
J1939 and CanOpen. Generally it should be possible to use the CMS with either, as well as other CAN-bus systems.
6.4.2.1 Installation
− Perform a general installation and check of the CMS as detailed in section 6 earlier.
− Perform a one-off general configuration check of the CMS using a PC running RMF-View e.g. set it to test
continuously and automatically start testing on power up. This procedure is described earlier in section 6.
You will need a suitable RS485 interface, such as the CMS-USBi.
− Use the software to configure any CAN-bus specific parameters required by your CAN-bus network, for
example configure a CAN-bus message ID and baud rate
Figure 6.29
− Connect the CMS to your CAN-bus network and provide a 24VDC power supply, as per figure 6.29.
− The CMS automatically emits the test result message after each set test interval.
− Configure your CAN-bus controller to listen for the messages configured above.
− The CMS requires a DC power supply and the two CAN-bus signals CANL and CANH, as shown in Figure 1.
The numbers shown are the pin numbers of the circular connector that plugs into the CMS.
− CAN-bus requires the network to be terminated at each end. This must be done externally to the CMS.
− The CAN-bus signals CANL and CANH are referred to the system 0V supply. These should stay within the
common mode range allowed by the ISO-11898-4 CAN-bus standard relative to the CMS 0V connection.
This range is -2V to +7V. This can be normally be ensured by connecting together the CMS 0V and the 0V
of the CAN-bus controller. The ``CAN 0V’’ wire shown indicates this link. (Not needed if both CAN-bus
controller and CMS are connected to a vehicle chassis or otherwise ``Earthed’’.)
− There are other wires available for switched alarm and start signals (optional). These are documented
separately in section 6.1.2.

48
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
6.4.2.2 Configuration
6.4.2.2.1 Use PC Software for Configuration
The free RMF-View software package is needed in order to initially configure the CMS. Once configured, the unit
can be left connected to the CAN-bus network.
The CMS was designed to be as flexible as possible. There are large number of options for setting operating
modes, test result formats, alarm settings, downloading stored data etc.
The easiest approach is to use RMF-View to configure the test parameters and result format. Then the customer
application only has to read the results.
The CAN-bus parameters are configured from the Communication Settings dialogue, accessed from the CMS
Settings dialogue (see section 6.3.3).
Figure 6.30 Communication Settings Dialogue
The CMS can use either CAN 2.0A ``basic’’ format with 11 bit identifiers, or CAN2.0B ``extended frame’’ format
with 29 bit identifiers.
6.4.2.2.2 CAN2.0B and J1939
The default 29 bit format is designed to be compatible with the J1939 standard. It should also be possible to use
the CMS with any system that permits arbitrary raw CAN-bus 2.0B identifiers to be received.
The dialogue shows the default CAN-bus settings. The CMS transmits all data using a range of message identifiers
starting at that selected. If the ``Use Defaults’’ button is pressed, the program constructs an identifier suitable for
J1939 (i.e. this will use PGNs within the region allocated to proprietary applications, starting at 0x00FFB53F).
At the end of each test, the CMS will generate a ``test result codes’’ message using the selected CAN-bus
identifier.
On a J1939 network the test result will appear as PGN 0x00ff00. Users not using J1939 can simply listen for
messages with the identifier shown in the dialogue, e.g. 0x18FFB53F.

49
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
6.4.2.2.3 CAN2.0A and CanOpen
The 11 bit format is designed to be compatible with the CanOpen standard. It can also be used with any system
that allows raw CAN-bus 2.0A identifiers to be received.
In order to use 11 bit identifiers (CAN 2.0A) set a value below 0x7ff for the ``Base Address’’.
For a CanOpen network, use a base address of 0x182 for example. This will result in message IDs corresponding to
the CanOpen ``pre-defined connection set’’.
6.4.2.3 Operations
6.4.2.3.1 CAN-bus Settings
CAN-bus physical layer
ISO-11898-2
Protocol type
CAN2.0B (29 bit identifiers)
CAN2.0A (11 bit identifiers)
Baud
User Set 1M/800k/500k/250k/125k/100k/50k/20k/10k
Identifier Range
User Set
6.4.2.3.2 Operation
Typically the installer will have configured the CMS to automatically start continuous testing. At the end of each
set test interval (e.g. 2 minutes) the CMS will emit a CAN ``Result Codes’’ message using the set CAN identifier
(e.g. 0x18FFB53F using hexadecimal notation). So a typical CAN message might be:
Byte
Identifier
1 2 3 4 5 6 7 8 0x18FFB53F
12 8 2
Details of the CAN-bus messages supported are in 11.2
See appendix 11.2 for more an example walk through and messages.
6.4.3 Analogue 4-20mA Modes
The CMS provides two analog 4-20mA current loop outputs, A and B. In order to provide the possibility of
transmitting more than two parameters, several different modes can be chosen to suit the application.
6.4.3.1 Fixed – NAS1638 and RH
The CMS result format must be set to NAS1638. The outputs then simply indicate the NAS1638 contamination
class and the RH level as follows:
Output A
Contamination Code
=mA-5
4mA NAS 00
5mA NAS 0
6mA NAS 1
…
17mA NAS 12
20mA OVERRANGE
Output B
RH%
=(mA-4)*100/16
4mA 0% RH
5mA 6.25% RH
20mA 100% RH

50
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
6.4.3.2 Time Multiplexed Schemes
These output the result parameters on a single output (A) in a timed sequence. This mode would be used to read
the result parameters in to a PLC. The PLC would need to be programmed to read each parameter at the correct
time.
These modes are still under development; please contact RMF Systems for details.
− We output a current <5mA (4.0mA) for 1 second to indicate start of "frame", this is denoted by <SYNC> in the
following examples. The PLC needs to continuously check for this condition so that it can start the timer
sequence for acquiring the results.
− Parameters are output in a sequence, one parameter per second until the end of the list.
− We use an "out of range" current of >20mA (24mA) to indicate parameter not available.
− The sequence is then repeated
RH Coding
The RH value is encoded according to the formula:
mA = 6 + (RH% / 10)
Or
RH% = (mA – 6) * 10
So 0% RH =6mA, 100% RH =16mA (max legal measurement value), unavailable = 24mA
Temperature Coding
The temperature in degrees C is encoded according to the formula:
mA = 10 + (°C / 10)
Or
°C = (mA – 10) * 10
NAS1638, AS4059E1, ISO11218
Parameters are output in the sequence:
<SYNC> <CLASS> <CLASS 5-15um> <CLASS 15-25um> <CLASS 25-50> <CLASS 50-100> <CLASS 100+> <RH> <TEMP>
<...>
These contamination classes are encoded as:
Class = mA -7
For example: Class 00 = 6mA, Class 0 = 7mA, Class 1 = 8mA,... Class 12 = 19mA, off scale = 20mA
ISO4406
Parameters are output in the sequence:
<SYNC> <ISO4> <ISO6> <ISO14> <ISO21> <ISO25> <ISO38> <ISO50> <ISO70> <RH> <TEMP> <...>

51
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
ISO4406 codes are encoded as:
𝑚𝐴 = 6 + 𝐼𝑆𝑂 / 2
Or
𝐼𝑆𝑂 = 2 × (𝑚𝐴 − 6)
So 6mA = ISO 0, 20mA = ISO28
AS4059E2
Parameters are output in the sequence:
<SYNC> <BASIC> <A> <B> <C> <D> <E> <F> <RH> <TEMP> <...>
AS4059E2 contamination codes are encoded as:
𝑚𝐴 = 6 + ((𝑐𝑜𝑑𝑒 + 2) / 2)
Or
𝑐𝑜𝑑𝑒 = 2 × (𝑚𝐴 − 6) − 2 = 2 × 𝑚𝐴 – 14
So that 6mA = -2 = 000, 6.5mA = -1 = 00, 7.0mA = 0, 7.5mA = 1, 13mA = 12 =max valid reading, 20 mA = over range
6.4.3.3 Time Multiplexed Scheme 2
This outputs the parameters as currents, using values designed for viewing directly on a programmable process
meter. There is no "sync" value but the final parameter stays on for 2 seconds instead of 1. To avoid confusion the
RH channel does not output temperature (just static RH value). The other channel outputs just the overall
contamination code value except for ISO4406 where it cycles between 3 ISO codes.
6.5 Disposal
− All CMS products are sent in a cardboard box with foam inside and these should be recycled accordingly.
− Fluids used with the CMS should be fully drained and disposed of according to EU waste framework directive
and ISO44001 Environmental Management.

52
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
7 Troubleshooting / FAQ
7.1 Misuse of Product
− The product should be connected to a power supply within the rating of the product and not wired directly to
the mains.
− This product should be connected to a hydraulic line; this must not exceed the upper pressure limit of the
product
− Connection hoses should never be allowed to lie along the floor when the CMS is installed and in use.
− The operator should follow all standard operating procedures previously set at the operating location as well as
the procedures required by the manufacturer.
− The CMS is not suitable for use in an explosive environment or an ATEX zone, for this refer to the CMSAZ2.
− Over tightening of test points/ hoses can damage threads causing the unit to fail.
− The product is designed with no moving components. Should it be used outside of its fluid viscosity specification
the unit will flag a flow error and invalidate that test result.
7.2 Fault Finding
7.2.1 LED Flashing / Fault Codes
The CMS front panel led indicates a fault by a number of white flashes, with a red background. The number of
flashes indicates the fault code, the screen version will also display the fault code and function:
1. Optical - An optical fault could indicate LED failure or blockage of the optical path. Try flushing with
Petroleum Ether, or return to RMF Systems.
2. Low Flow - The CMS estimates the flow by measuring the transition time of the particles. The Low Flow
warning indicates that the flow rate is below the minimum recommended level
(A)
. Note that the alarm
should be disabled in the settings when used on clean systems, such as flushing/cleaning rigs, where the
particle count could reach 14/12/10 or lower.
3. High Flow - The flow rate is above the maximum recommended level. This will degrade the accuracy of
the particle counts.
4. Logging - Fault with data logging memory.
5. Water Sensor - Fault with the water sensor.
(A) The unit will still work but may be more susceptible to errors caused by pressure fluctuations. This
warning can also come on when there are no particles whatsoever detected, i.e. the fluid is totally
"clean’’. In this case the correct result e.g. 0/0/0 is still generated.

53
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
7.2.2 Test Status
The status is shown on the CMS screen. This contains a number indicating the current state of the CMS, according
to the table below. This allows a system to remotely monitor the CMS operation, if desired, allowing more specific
diagnostics
(B)
.
Value
Function
Comment
0
NOT READY
Unit is powering up or there is some problem
1
READY
Ready to start a test
(C)
2
TESTING
Test in progress
3
WAITING
Waiting between tests
(D)
128
FAULT OPTICAL
LED failure/ sensor blocked/ filled with air
129
FAULT FLOW LOW
Flow too low for reliable test
(E)
130
FAULT FLOW HIGH
Flow too high for reliable test
131
FAULT LOGGING
Fault with data logging
132
FAULT WATER SENSOR
Water sensor failure
Table 7A
(B) However the fault conditions are also indicated on the front panel LED, while ``No Result’’ in the case of a
fault is indicated using special result values as previously described.
(C) User has not set tests to occur automatically.
(D) User has set a non-zero test interval.
(E) Or fluid is totally clean (no particle counts). Flow alarm can be turned off by user if this is a problem, for
example cleaning rigs.
7.2.3 Other Faults
Unexpected results obtained from sample
− Check that the microbore pressure hose has been fully connected at both the system and CMS ends.
NOTE: removing either hose from the CMS is not indicative of flow through the CMS as the hose end is
now at atmosphere. The pressure drop across the CMS should be verified, see section 6.1.2.1.
− Confirm that the flow through the CMS is within the range of the unit.
− High water / aeration levels
Remote Device dialogue not responding to buttons being pressed
− Check that correct COM port has been selected in the Remote Device dialogue.
− Check USB driver has been installed.
− Disconnect power supply to CMS and then reconnect it.
If the CMS has been subjected to excessive contamination and a blockage is suspected, a flush with a suitable
solvent may clear the blockage.
The standard CMS is fitted with Viton seals, so Petroleum Ether or Iso Propyl Alcohol may be used for this
purpose, in conjunction with the RMF Systems Bottle Sampling Unit. See flushing guidelines on supplied product
USB.
DO NOT USE ACETONE

54
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
7.3 Test Duration
The set Test Duration is the amount of time for which particle counts are accumulated, before the test result is
updated. The default of 120 seconds is likely to be suitable for most applications. However it is possible to set
other values.
A shorter time enables the unit to respond more quickly to variations in cleanliness. This may be desired in order
to reduce the product test time in a production line situation.
A longer test time enables the unit to average out variations in cleanliness and produce a more stable result. This
is especially true for the larger particle sizes. In clean systems there are very few of these, so a large amount of
fluid needs to be sampled in order to count a statistically significant number.
Another factor is the flow rate. This can be traded off with cycle time, since a higher flow allows the same amount
of fluid to be sampled in a shorter time.
"Very Clean" Systems – Longer test times / higher flows are needed.
"Normal" or "Dirty" Systems – Shorter test times or lower flows are acceptable.
Figure 7.1 Test time needed for reliable indication by ISO code

55
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
8 How to Order
8.1 Common Features
-All versions can be controlled by a PC, PLC or the CMS-RDU Remote Display Unit.
-Time- stamped data-logging for around 4000 tests
-An integral status LED to indicate fault conditions
-RS485/CANBUS/4-20mA communications
-Measurement in multiple international standard formats
-All units include 3m pre-wired control cable and RMF-View test analysis software. For more details see the
product brochure and the Specification.
-All units include settable upper and lower limits for the test results, with two programmable "Alarm’’ relay
outputs
-The full colour front panel LED indicator also reflects the test results, indicating if any set limits have been
exceeded. See section 6.2.2.

56
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
9 Related Products
9.1 RDU 2.0
The optional CMSRDU2 is a separate accessory product allowing control of a CMS that is typically inaccessible via
the keypad, display and USB download.
The sensor itself is mounted remotely in another unit (normally a non-screened version). This allows the operator
full control of the CMS.
The CMSRDU2 connects "in between’’ the incoming supply/serial connections, and the CMS sensor. It is
"transparent’’ to the serial communications. This means that a PLC or RMF-View can operate in the usual way to
control the CMS, change settings or download results, without having to unplug the RDU.
Similar components are used for the RDU as for the normal CMS-KU option, so the same instructions apply for
operation. See chapter 6.2.2.2 for more details.
The RDU wiring details are shown in figure 6.4.
Please note that the RDU cable provided must be plugged into the right hand (remote) connector of the CMS for
it to work.
Please note that the RDU only records tests whilst powered up. If tests are run without the RDU connected then
they will have to be downloaded directly from the CMS.
If the CMS connected to the RDU has a serial number lower than 1610800, then the power supply must go via the
RDU. Serial numbers after 161800 can be powered either via the CMS or RDU.
The CMSRDU2 is fully backward compatible with the first revision CMS products.
9.2 CMSUSBI
The USBi is a plug and play solution for easily connecting a computer to the CMS.
It includes a USB: RS485 interface with a terminal block pre-wired with the CMS cable. An extra terminal block is
provided for any customer wiring to external devices.
An external DC adapter supplied can be used to power the complete system, or if the computer is always
connected during use, power can be taken directly from the USB cable.
Note: Computer should have mains power applied at all times.
Detailed installation and usage instructions are provided in the separate product user guide.

57
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
10 Service and Recalibration
Warranty The CMS is guaranteed for 12 months from date of receipt. See section 3 for further
details.
Recalibration The CMS is recommended to be recalibrated every 12 months. Return to
RMF Systems for recalibration.
As a policy of continual improvement, RMF Systems reserves the right to alter the specification without prior
notice.

58
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
11 Reference
11.1 Further Modbus Information
The CMS is a Modbus Slave. That is, it responds only to commands sent to it by the Modbus controller (the
Modbus Master). The controller can be a program running on a PC, or a PLC.
Modbus requests are sent to the configured CMS node address. If there is only one CMS on network segment,
then the ``Permanent Address’’ of 204 can be used. If there is more than one, then unique node addresses must
be configured for each.
NOTE: This is not part of the Modbus specification (and in fact violates it). The CMS will always respond on node
address 204, in addition to the other set value. This was done so that RMF-View can connect directly without
configuration or scanning of the network.
The Master periodically sends a Modbus command ``frame’’ to the CMS node address. The CMS acknowledges
each request with a response frame.
11.1.1 Modbus Registers
The Modbus protocol defines many types of information interchange commands (``function codes’’). However in
order to simplify implementation the CMS only uses one type - the Modbus ``Register’’. Conceptually the CMS
appears as a collection of Modbus Registers. Each register is numbered - the CMS has 125 registers.
Each register holds a number representing some quantity. For example, register number 2 holds a number
indicating the CMS software revision.
11.1.1.1 Register Numbering
Addresses shown here are those appearing ``on the wire’’. Unfortunately some Modbus controllers may translate
these addresses to different ones. For example for some controllers the user will need to use ``addresses’’
starting at 40000 instead of 0.
The CMS uses the registers from 0-124 (this allows all registers to fit in a single Modbus frame). Registers can be
divided into classes as follows:
Status Registers – these are ‘read only’ registers that indicate test results and CMS status. They can be read freely
at any time (although test results are only valid after a successful test).
Setting Registers – these are read-write registers used to hold the CMS settings. Take care not to inadvertently
write to any of these registers since the CMS settings will be altered!
Calibration Registers – Some registers, not documented here, are protected settings that can only be altered
during factory calibration.
Number
Function
Units
Representation
0
Product ID
Unsigned integer
1
Protocol ID
Unsigned integer
2
Firmware Version
X100
Unsigned integer
3
Hardware options
Bitmap
4-5
Machine Serial Number
32 bit unsigned integer
6
Modbus Address
Integer
7
Ignore Initial N
Unsigned integer
8-9
Test Number
32 bit integer

59
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
10-17
Test Reference
Array of 16 packed characters
18
Test Duration
Unsigned integer
19
Test Format
20
Test Mode
21
Command
Unsigned integer
22-23
Test Interval
S
Unsigned 32 bit integer
24-25
Date/Time
Date
Unsigned 32 bit integer
26
Alarm Mode
Unsigned integer
27
Reserved
28
Faults
29
Reserved
30
Status
Unsigned integer
31
Status Flags
32
LED Level
Unsigned integer
33
Temperature
°C x100
34
RH
% x100
35
Peak Pulse
Unsigned integer
36
Test Completion
Unsigned integer
37
Flow Indication
Unsigned integer
38-39
Reserved
40-55
Particle Counts
Array of 8 32 bit integers
56-63
Result Codes
Array of 8 signed integers
64-71
Contamination Limit Upper
Array of 8 signed integers
72-79
Contamination Limit Lower
Array of 8 signed integers
80
Limit Water Upper
% x100
signed integer
81
Limit Water Lower
% x100
signed integer
82
Limit Temperature Upper
°C x100
signed integer
83
Limit Temperature Lower
°C x100
signed integer
84-85
Log Interval
Seconds
Unsigned 32 bit integer
86-87
Last Download
Date
Unsigned 32 bit integer
88
Language
Unsigned integer
89-116
Reserved
117-118
Calibration Due
Date
Unsigned 32 bit integer
119-120
Calibration Last
Date
Unsigned 32 bit integer
121
Reserved
122
Calibration LED Level Last
123
Calibration LED Level Initial
124
Reserved
Table 11A Modbus Register Map
11.1.1.2 Representations
Modbus Registers - All quantities are represented using Modbus registers. Modbus registers are 16 bit (0-65535
decimal or 0-0xFFFF in hexadecimal notation).
Unsigned Integers - These are simply single Modbus registers. Each can take values from 0 to 65535.

60
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
They may be simple numeric quantities such as ``test time in seconds’’. They can also be enumerations such as
``result format’’ where ``0’’ means ISO4406, ``1’’ means NAS1638 etc.
Signed Integers - These are used for quantities that may become negative, such as °C. They are also used for
result codes using formats similar to NAS1638, where we have to represent the NAS ``00’’ class as -1, and ``000’’
as -2.
Signed integers are represented in single Modbus registers using the ``twos complement’’ standard, as usual in
computing. If a user-written program incorrectly interprets a signed integer as unsigned, then positive numbers
will still be interpreted correctly. However, small negative numbers will appear as large positive ones. In
particular, -1 appears as 65535 and -2 as 65534. These might be seen when interpreting the NAS codes
mentioned above.
Take care when writing software dealing with NAS codes or Temperature measurements.
32 Bit Unsigned Integers - Some quantities are (or may become) too large to fit into a single 16-bit register. For
example the Test Number could eventually increment to more than 65535. These items are represented using
two consecutive registers; the combination makes up a 32-bit integer. For example, the value of such a 32 bit
unsigned integer stored in registers 8-9 may be calculated using the formula:
𝑣𝑎𝑙𝑢𝑒 = (65536 × (𝑟𝑒𝑔𝑖𝑠𝑡𝑒𝑟 8)) + (𝑟𝑒𝑔𝑖𝑠𝑡𝑒𝑟 9)
Bitmaps - Bitmaps are again single 16-bit Modbus registers, but they have a special interpretation. Each ``bit’’ in
the register has a separate function. The most important example is the ``status flags’’ register (31). Each register
bit encodes a separate function, for example ``result valid’’, ``new result’’, ``over temperature alarm’’ etc. In this
document bits are numbered starting with bit 0 = least significant bit.
A user programming environment such as a PLC programming system or a high level computer language will
normally have functions that allow easy access of individual bit values in a register.
Arrays - An Array is simply a sequence of objects packed in consecutive registers. For example the ``result codes’’
are in an array of 8 registers. Code [0] is in register 56; code [1] is in register 57 etc.
In the case of an array of 32-bit integers, each element itself takes up 2 registers, so there are twice as many
registers used as elements in the array. In the case of the particle counts array, there are 8 particle sizes counted
so these are stored in 8 × 2 = 16 registers.
Packed Characters - These are used to encode the user-settable ``test reference’’ string, used to label each test.
Characters are packed two per Modbus register. This will probably not be used in a user-written Modbus
program, but in principle the test reference could be set to a different value for each test. The test reference
string consists of 16 characters packed into an array of 8 consecutive registers.
Date/Time - A ``Date’’ represents a calendar date and time as a 32 bit unsigned integer (it is the number of
seconds since Jan 1 1970). User programs will not generally have to deal with this, but in principle they could e.g.
read or set the real time clock from registers 24-25. It can be useful during development to be able to read the
clock and see a continuously incrementing value of seconds.

61
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
11.1.1.3 Register Functions
11.1.1.3.1 Test Mode
Factory set value: 0
This is the "test mode", each bit represents an option corresponding to a tick box on the CMS settings screen (see
our RMF-View software and in the CMS manual).
Each bit of the register encodes one tick box.
The factory set mode is 0 for all bits, so all the tick boxes are turned off. You may want to turn on bit 8 (disable
low flow alarm when clean) if you have a very clean system.
Here are the bit definitions:
Bit
Function
Comment
0
CYCLE_COTINUOUS
Continuous Testing
1
START_TEST_AUTOMATICALLY
Start Testing Automatically
2
CONTINUOUS_STOP_WHEN_CLEAN
Stop Testing When Clean
3
CONTINUOUS_LOG_EVERY_TEST
Continuous Mode: Log Every Test
4
CONTINUOUS_CONFIRM_TARGET
Repeat final test to confirm target level achieved
5
RESERVED
6 RESERVED
7 SIMULATE
Produces simulated test results
8
LOW_FLOW_CLEAN_DISABLED
Prevents spurious low flow alarms on clean systems
Table 11B Test Mode Register Bit Definitions
There is some general information about what these options do in section 6.3.3.
11.1.1.3.2 Command Register
This is register 21. It is special in that writing a number to this register does not store the number, but instead
commands the CMS to perform a function according to the number written. The main command is ``START’’, but
the others are documented here for completeness and avoidance.
Bit
Function
Comment
1
START TEST
Start or Restart a test
2
RECALCULATE
3 FORCE OUTPUT 1 ON
4 FORCE OUTPUT 1 OFF
5 FORCE OUTPUT 2 ON
6 FORCE OUTPUT 2 OFF
7 TEST MODE ON
Flashes LED and exercises outputs
8
TEST MODE OFF
9 STOP
Abort a test in progress
10
LOG ERASE
Caution!
11
LOG SEEK END
12
LOG SEEK PREVIOUS
Table 11C Command Register

62
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
11.1.1.3.3 Status Register
This is read-only register 30. It contains a number (an enumeration) indicating the status of the CMS. See table 7A
11.1.1.4 Bitmap Functions
11.1.1.4.1 Status Flags Bitmap
This is read-only register 31. It represents the states of various items in a bitmap format.
-Bits 0-2 are so that external equipment (for example RMF-View or a PLC/MMI) can display, update and log results
intelligently.
-Bits 3 and 4 can be used to monitor the test progress.
-Bits 5-10 are used to generate alarms. Depending on the selected alarm mode, they operate the alarm relay
output(s). But they can also be monitored directly by a PLC/MMI program and used to drive indicators, for
example.
-Bit 11 is used internally to detect that the CMS is being controlled by Modbus (from a PLC or by RMF-View).
-Finally bits 12-14 reflect the state of the CMS ``start signal’’ input and alarm output relays.
Bit
Function
Comment
0
RESULT_VALID
Current result is valid
1
RESULT_NEW
A new result is available
2
RESULT_LOG
Current result should be logged
3
TESTING
Test in progress
4
COMPLETE
Test is complete
5
ALM_HI_COUNT
High particle count alarm
6
ALM_HI_H20
High water content alarm
7
ALM_HI_TEMP
High temperature alarm
8
ALM_LO_COUNT
Low particle count alarm
9
ALM_LO_H20
Low water content alarm
10
ALM_LO_TEMP
Low temperature alarm
11
REMOTE_CONTROL
Unit is under remote control
12
IO_IP
Start signal input
13
IO_OP1
Alarm output 1
14
IO_OP2
Alarm output 2
15
UNUSED
Not currently used
Table 11D Status Flags

63
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
11.1.1.4.2 Fault Flags Bitmap
This is read-only register 28 (firmware 0.43 or higher required). It represents detected device or installation faults
in a bitmap format. The faults are also available as result codes in the status register; however those are transient
and may only appear briefly before a new test is started.
The fault bits here remain until the end of the next test (where they may be cleared if the fault has gone).
Bit
Function
Comment
0
OPTICAL FAULT
See table 7A
1
LOW FLOW
See table 7A
2
HIGH FLOW
See table 7A
3
DATA LOGGING
See table 7A
4
WATER SENSOR
See table 7A
Table 11E Fault Flags
11.1.2 Implementing Modbus
This section is for advanced users who wish to do their own programming to implement the Modbus controller. It
is not needed if the users control system already has direct support for being a Modbus master. The following
describes a minimal system capable of periodically reading data from the CMS; it is not intended as a general
purpose Modbus implementation.
For a background to this section the implementer can review the Modbus source documents:
http://www.modbus.org/docs/Modbus_over_serial_line_V1.pdf
http://www.modbus.org/docs/Modbus_Application_Protocol_V1_1b.pdf
In order to collect data from the CMS, the users control system needs to be able to send a Modbus command
frame and receive a response frame via the RS485 signals.
A frame consists of a sequence of bytes, transmitted back-to-back over the RS485 interface.
A command frame can be generated corresponding to a Modbus ``read registers’’ command. Using hexadecimal
notation, the sequence required to return all registers would be a sequence of 8 bytes:
<0xCC> <0x04> <0x00> <0x00> <0x00> <0x7D> <0x20> <0x36>
This sequence is decoded by the CMS as:
<0xCC> = <slave address>
<0x04> = <function code: read registers>
<0x00> <0x00> = <start register high> <start register low> (2 bytes)
<0x00> <0x7D> = <number of registers high> <number of registers low> (2 bytes)
<0x20> <0x36> = <checksum high> <checksum low> (2 bytes)
The CMS will then return a 255 byte long response frame containing the requested register contents.
This 255 byte response frame looks like:
<0xCC> <0x04> <0xfa> <250 bytes of data> <2 bytes of checksum>
The <250 bytes of data> contains the contents of the 125 registers requested. Each 16 bit register is encoded in
two sequential bytes, in high-low (``big-endian’’) order.

64
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
The simplest method is then to read the required registers directly out of the data area of this response frame.
For example, the CMS product ID code appears in Modbus register 0. This would therefore appear in the first two
bytes of the data area above, or at the 4th and 5th bytes counting from the start of the frame. In a programming
language like ``C’’ the product ID could be extracted from an array containing the frame using a statement like:
Unsigned product_id = 256*buf[3+0] + buf[3+1];
Users of PLCs or other programming languages will hopefully be able to translate using the information provided
here.
The CMS product ID is 0xD3DD (hexadecimal) or 54237 (decimal). This fact can be used as a check when
attempting the above implementation.
Finally we come to extracting the test result. Referring to the CMS Modbus register map, the test result codes
appear in registers 56-63. In the case of NAS1638, the overall NAS code is in register 56. So a program can extract
the overall NAS code from the result frame using logic equivalent to the ``C’’ language expression:
Unsigned NAS = 256*buf[3 + 56*2 + 0] + buf[3 + 56*2 + 1]
This is a statement in the ``C’’ programming language that reads the 116th and 117th bytes of the response
frame, and forms a 16 bit number from these two 8 bit bytes. This reads Modbus register 56, the NAS code.
Similar expressions can be used to read the other registers according to the data required.
For PLC users the details will be dependent on their own programming environment and facilities. But hopefully
the above can be used as a guide for their own implementation.

65
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
11.2 Further CAN-bus Information
11.2.1 Example Walk through
Real applications will generally have an existing CAN network, but in this chapter we show how the CMS can be
connected to a PC using a USB: CAN adaptor.
The adaptor used in this example is the ``PCAN-USB’’, available from Peak System Technik GmbH or a distributor.
We also need to make up a special cable to connect this to the CMS.
Figure 11.1 PCAN-USB CAN-bus to USB Adaptor
11.2.1.1 Equipment Required
− CMS with CAN-bus capability
− PCAN-USB USB:CAN Adaptor
− CMS-USBi interface for initial CMS setup
− PC with USB ports running Windows
− Special made-up CAN-bus cable detailed below
− 12 or 24 Volt DC power supply

66
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Figure 11.2 Connecting the CMS to the PCAN-USB Adaptor
The ``TERMINATOR’’ resistor shown simulates the combined effect of the bus termination resistors normally used
on either end of a CAN-bus network. Its value is not critical; anything from 50-150 ohms will work.
11.2.1.2 Initial Configuration
− Initially we connect using the CMS-USBi interface so that the CMS can be comfortably configured using
RMF-View. Detailed information is provided earlier in the user guides but the general procedure is:
− Install RMF-View
− Plug in the CMS-USBi
− The ``Hardware Found’’ wizard will appear. If you have an Internet connection you can let Windows
Update install the driver, otherwise point the wizard to the drivers provided.
− Plug the CMS into the CMS-USBi
− Start RMF-View
− Select Tools/Remote Control to connect to the CMS.

67
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
11.2.1.2.1 Suggested General Settings
Figure 11.3 General Settings
Press the Settings button to open the Settings dialogue. The important settings for this walk-through are:
− Test Duration; 10 seconds
− Test Continuously: On, interval 0.
− Start Testing Automatically: On
− Stop Testing When Clean: Off
− Simulate Test: On
NOTE: Simulate Test will cause fictitious test results to be generated in order to test communications and
demonstrate the unit. Do not forget to turn this off before deploying in a real application!
11.2.1.2.2 Suggested Communication Settings
Press the ``Communications...’’ button to open the Communications dialogue. See figure 6.30

68
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Select the Interface, Node Number and Baud Rate as shown, then press ``Use Defaults’’ to assign the ``base
address’’. This will define the start of the block of CAN message identifiers used by the software (using a value
compatible with the J1939 standard).
Press the OK button on the ``Communications Settings’’ and ``Remote Device Settings’’ dialogues. Leave the
Remote Control dialogue open.
Now check that the CMS is now set to automatically perform tests:
− Unplug the CMS circular connector
− Plug it back in
− You should see the connection re-established on the Remote Control dialogue within a few seconds.
− A test should have been automatically started
− The tests should repeat every 10 seconds
− You should see a test result that starts high and decreases with each further test.
Close the Remote Control dialogue and quit the program. Unplug the CMS at the circular connector.
11.2.1.3 PCAN-USB Software
The PCAN-USB adaptor comes with a software CD. This includes a simple CAN-bus diagnostic utility called ``PCANView USB’’. This should be installed from the CD.
Connect the CMS to the computer using the special made-up cable and the PCAN-USB. Power-up the CMS by
turning on the power supply.
Upon connecting the PCAN-USB and starting PCAN-View, the Connect dialogue is presented.
Figure 11.4 PCAN-View Connect Dialogue
Select a baud rate to match that being used on the CMS, for example 250k. Select the ``Extended’’ message filter
(so that 29 bit identifiers are used). Press OK to go to the main PCAN-View screen.

69
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
11.2.1.3.1 Simulated Tests
Plug the CMS into its circular connector. It should power up and start performing a test.
If everything is working, after about 20 seconds you should see CAN messages similar to that shown below.
This shows the 2nd result received. The first 3 bytes 0x17, 0x15, 0x13 show the 3 ISO codes (the display is in
hexadecimal (base16) so the actual code is 23/21/19).
Figure 11.5 PCAN-View Main Screen
Figure 11.6 Reception of a Test Result Codes Message

70
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
11.2.2 Messages
11.2.2.1 CAN2.0B and J1939
The CMS CAN-bus implementation is designed to be interoperable with J1939 networks. This is done by
restricting CAN-bus message IDs to those within the proprietary ranges allocated by J1939. Advanced J1939
features have been avoided, so that customers not using J1939 will also be able to communicate using ``generic’’
CAN-bus frames. For non-J1939 users the only requirement is that their network should support CAN2.0 (29 bit
identifiers).
Broadcast messages use the J1939 PDU2 format. These are transmitted periodically to communicate the CMS
status and the latest test results.
Peer-to-peer messages use the J1939 PDU1 format. These are used to control the CMS. These are generally
optional; customers may opt to leave the CMS automatically testing and broadcasting results.
Node Address (PDU1)
0x3F (J1939 “Oil Sensor”)
Command & Configuration Message PGN
0xEF3F
Broadcast Messages PGNs
0xFFB5 – 0xFFB9
Default Broadcast Interval
1s
Data Page
0
Priority
6
PDU Format/ PDU specific
Derived from PGN
Byte Endianness
All data is on little-endian byte order
Table 11F CAN-bus Parameters for J1939 Interoperation
11.2.2.2 Non-J1939 CAN2.0B Users
− Taken together these imply a generic CAN "base address" of 0x18FFB53F.
− Command and control messages can then be sent to CAN address 0x18EF3F00.
11.2.2.3 CAN2.0A and CanOpen
On CanOpen networks the results need to be transmitted as ``process data objects’’ (PDOs) from the ``predefined
connection set’’. In order to do this, ensure that the set base address is equal to (0x180 + node number). For
example, 0x182 to make the CMS node address 2.
11.2.2.4 CAN-bus Message List
The message ID numbers shown are examples only and are dependent on the set base address.
For CAN2.0A/CanOpen we have an example base address of 0x182. So you see ``2’’ as the last digit of the entire
message IDs. CanOpen interprets this as the device node number.
For CAN2.0B/J1939 we have an example base address of 0x18FFB53F. The equivalent node number is ``3F’’ so you
see this appear in all the message IDs.
For other node numbers change the set base address value as required. CanOpen has node numbers from 0x01 to
0x7f. J1939 has node numbers from 0x01 to 0xff.

71
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Parameter Name
CAN2.0A ID
CanOpen PDO
CAN2.0B ID
J1939 PGN
Result Codes
0x182
Transmit PDO 1
0x18FFB53F
0xFFB5
Status
0x282
Transmit PDO 2
0x18FFB63F
0xFFB6
Water Sensor
0x382
Transmit PDO 3
0x18FFB73F
0xFFB7
Commands
0x202
Receive PDO 1
0x18EF3F00
PDU1
Table 11G CAN-bus Messages
11.2.2.4.1 Message: Result Codes
This message is transmitted after each test.
The test result is expressed as a set of codes in the selected Test Format (ISO4406, NAS1638 etc.). The test result
message is always 8 bytes long, with the result codes packed as follows:
Format:
Byte
ISO 4406 Code
AS4059E Table 2
Class
NAS1638/ AS4059E Table 1/ ISO
11218 (Draft) Codes/ Classes
1
≥4µ
Basic
Basic
2
≥6µ - - 3 ≥14µ
A
5-15 µm
4
≥21µ
B
15-25 µm
5
≥25µ
C
25-50 µm
6
≥38µ
D
50-100 µm
7
≥50µ
E
>100 µm
8
≥70µ
F
NOTE: The ‘basic’ class is the highest of the individual size classes.
ISO4406 only defines codes for the first 3 sizes 4, 6 and 14µm. we extend the concept to cover the other
sizes. This allows limits to be set on the number of large particles, even when using the ISO 4406 coding
system.
11.2.2.4.1.1 Special Values
The result codes use a few ``special’’ values in order to represent codes that are not simple numbers.
The NAS1638 standard defines classes ``00’’ and ``000’’, these are classes ``cleaner’’ than class 0. We represent
these using signed integers of value -1 and -2 respectively (these will appear as 255 and 254 if read as unsigned
integers).
11.2.2.4.2 Message: Status
The message is transmitted every 1 second so that it can be used as a ``heartbeat’’.
However if no test has been performed yet, the CMS will wait until it sees other CAN-bus activity before sending
anything.
Byte
Bit
Length
Type
Item
1-4 1 32
Unsigned
Test Number
5 1 8
Unsigned
Status Code
6 1 8
Unsigned
Completion
7-8 1 16
Bitmask
Status Flags

72
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Test Number - The current Test Number is an auto-incremented integer or can also be set as part of the Test
Start command. This is used to distinguish tests / circuits.
Status Code - This is a number used to indicate the current state of the CMS, or a fault code in the case of a
problem being detected. The codes are listed in Table III. This allows a system to remotely
monitor the CMS operation, if desired, allowing more specific diagnostics.
Completion - A number between 0 and 100 indicating the progress of the test. This will increase from 0 to 100
during the set test time. It can be used to drive a progress indicator.
Status Flags - This is a group of flags indicating test status.
11.2.2.4.2.1 Status Flags Bitmask
This is identical to table 11D (page 62).
Bits 0-2 are so that external equipment (for example RMF-View or a PLC/MMI) can display, update and log results
intelligently
Bits 3 and 4 can be used to monitor the test progress.
Bits 5-10 are used to generate alarms. Depending on the selected alarm mode, they operate the alarm relay
output(s). But they can also be monitored directly by a PLC/MMI program and used to drive indicators, for
example.
Bit 11 is used internally to detect that the CMS is being controlled by Modbus (from a PLC or by RMF-View).
Finally bits 12-14 reflect the state of the CMS ``start signal’’ input and alarm output relays.
11.2.2.4.3 Message: Water Sensor
Byte
Bit
Length
Type
Item
1 1 8
Unsigned
RH%
2 1 8
signed
Temperature degrees C
11.2.2.4.4 Message: Commands
Various commands can be sent to the CMS via CAN-bus.
For J1939 networks Peer-to-Peer (PDU1) Messages are used.
For CanOpen networks Receive Process Data Objects are used.
Byte
Bit
Length
Type
Item
1 1 8
Unsigned
Command Byte (0x00)
2 1 8
enum
(0, 1, 2, …)
3-6 1 32
Unsigned
Parameter

73
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
enum
Function
Parameter
1
Start Test
None
9
Stop Test
13(0xd)
Start Test
Fixed Test Number
14
Format ISO4406
Set ISO4406 result format
15
Format NAS1638
Set NAS1638 result format
16
Format AS4059_E2
Set AS4059E Table 2 result format
17
Format AS4059_E1
Set AS4059E Table 1 result format
18
Format ISO11218
Set ISO11218 result format
11.3 Measuring Water in Hydraulic and Lubricating Fluids
From North Notts Fluid Power Centre
In mineral oils and non-aqueous fire resistant fluids water is undesirable. Mineral oil usually has a water content
of 50-300 ppm which it can support without adverse consequences.
Once the water content exceeds about 500ppm the oil starts to appear hazy. Above this level there is a danger of
free water accumulating in the system in areas of low flow. This can lead to corrosion and accelerated wear.
Similarly, fire resistant fluids have a natural water content which may be different to mineral oils.
Saturation Levels
Since the effects of free (also emulsified) water are more harmful than
those of dissolved water, water levels should remain well below the
saturation point.
However, even water in solution can cause damage and therefore
every reasonable effort should be made to keep saturation levels as
low as possible. There is no such thing as too little water. As a
guideline, we recommend maintaining saturation levels below 50%
in all equipment.

74
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Examples: Hydraulic Oil @ 30°C = 200ppm=100% Saturation
Hydraulic Oil @ 65°C = 500ppm=100% Saturation

75
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
11.4 ISO4406:1999 Cleanliness Code System
Number or Particles per ml
Scale
No.
More than
Up to and
including
2.5M
-
>28
1.3M
2.5M
28
640K
1.3M
27
320K
640K
26
160K
320K
25
80k
160K
24
40k
80k
23
20k
40k
22
10k
20k
21
5000
10k
20
2500
5000
19
1300
2500
18
640
1300
17
320
640
16
160
320
15
80
160
14
40
80
13
20
40
12
10
20
11 5 10
10
2.5
5
9
1.3
2.5
8
0.64
1.3
7
0.32
0.64
6
0.16
0.32
5
0.08
0.16
4
0.04
0.08
3
0.02
0.04
2
0.01
0.02
1
0.0
0.01
0
Figure 11.2 Figure 11.3
The International Standards Organization standard ISO 4406:1999 is the preferred method of quoting the number
of solid contaminant particles in a sample.
The code is constructed from the combination of three scale numbers selected from Figure 11.1.
The first scale number represents the number of particles in a milliliter sample of the fluid that are larger than
4μm(c).
The second number represents the number of particles larger than 6μm(c).
The third represents the number of particles that are larger than 14μm(c).

76
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Microscope counting examines the particles differently to APCs and the code is given with two scale numbers
only. These are at 5μm and 15μm equivalent to the 6μm(c) and 14μm(c) of the APCs (Figure 11.2)
11.5 NAS1638 Cleanliness Code System (now defunct, replaced by SAE AS4059E Table
1)
The NAS system was originally developed in 1964 to define contamination classes for the contamination
contained within aircraft components. The application of this standard was extended to industrial hydraulic
systems simply because nothing else existed at the time. The coding system defines the maximum numbers
permitted of 100ml volume at various size intervals (differential counts) rather than using cumulative counts as in
ISO 4406:1999. Although there is no guidance given in the standard on how to quote the levels, most industrial
users quote a single code which is the highest recorded in all sizes and this convention is used on the CMS
software.
00 0 1 2 3 4 5 6 7 8 9
10
11
12
5-15
125
250
500
1000
2000
4000
8000
16000
32000
64000
128000
256000
512000
1024000
15-25
22
44
89
178
356
712
1425
2850
5700
11400
22800
45600
91200
182400
25-50 4 8
16
32
63
126
253
506
1012
2025
4050
8100
16200
32400
50-100
1 2 3 6 11
22
45
90
180
360
720
1440
2880
5760
Over 100
0 0 1 1 2 4 8
16
32
64
128
256
512
1024
Table 11.1 Contamination Level Classes according to NAS1638 (January 1964)
The contamination classes are defined by a number (from 00 to 12) which indicates the maximum number of
particles per 100 ml, counted on a differential basis, in a given size bracket.
11.6 SAE AS4059 REV E Cleanliness Classification for Hydraulic fluids
This SAE Aerospace Standard (AS) defines cleanliness levels for particulate contamination of hydraulic fluids and
includes methods of reporting data relating to the contamination levels. Tables 11.2 and 11.3 below provide the
Maximum Contamination Limits (Particles/100ml) of differential and cumulative particle counts respectively for
counts obtained by an automatic particle counter, e.g. CMS.
Size Range
μm(c):
6-14
14-21
21-38
38-70
>70
Class
00
125
22 4 1
0 0 250
44 8 2
0 1 500
89
16 3 1 2 1000
178
32 6 1 3 2000
356
63
11
2 4 4000
712
126
22
4 5 8000
1425
253
45
8 6 16000
2850
506
90
16 7 32000
5700
1012
180
32 8 64000
11400
2025
360
64 9 128000
22800
4050
720
128
10
256000
45600
8100
1440
256
11
512000
91200
16200
2880
512
12
1024000
182400
32400
5760
1024
Table 11.2 AS4059E Table 1 Cleanliness Classes for Differential Particle Counts

77
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Size Range
μm(c):
>4
>6
>14
>21
>38
>70
Size Code
A B C D E F Class
000
195
76
14 3 1 0 00
390
152
27 5 1
0 0 780
304
54
10 2 0 1 1560
609
109
20 4 1 2 3120
1217
217
39 7 1 3 6250
2432
432
76
13 2 4
1500
4864
864
152
26 4 5
25000
9731
1731
306
53 8 6
50000
19462
3462
612
106
16 7 100000
38924
6924
1224
212
32 8 200000
77849
13849
2449
424
64 9 400000
155698
27698
4898
848
128
10
800000
311396
55396
9796
1696
256
11
1600000
622792
110792
19592
3392
512
12
3200000
1245584
221584
39184
6784
1024
Table 11.3 AS4059E Table2 Cleanliness Classes for Cumulative Particle Counts
11.7 Recommendations
Unit
Type
ISO 4406:1999 Code
Pump
Piston (slow speed, in-line)
Piston (high speed, variable)
Gear
Vane
22/20/16
17/15/13
19/17/15
18/16/14
Motor
Axial Piston
Radial Piston
Gear
Vane
18/16/13
19/17/13
20/18/15
19/17/14
Valve
Directional (solenoid)
Pressure Control (modulating)
Flow Control
Check Valve
Cartridge Valve
Proportional
Servo-valve
20/18/15
19/17/14
19/17/14
20/18/15
20/18/15
18/16/13
16/14/11
Actuator
20/18/15
Most component manufacturers know the proportionate effect that increased dirt level has on the performance
of their components and issue maximum permissible contamination levels. They state that operating components
on fluids which are cleaner than those stated will increase life. However, the diversity of hydraulic systems in
terms of pressure, duty cycles, environments, lubrication required, contaminant types, etc, makes it almost
impossible to predict the components service life over and above that which can be reasonably expected.

78
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Furthermore, without the benefits of significant research material and the existence of standard contaminant
sensitivity tests, manufacturers who publish recommendations that are cleaner than competitors may be viewed
as having a more sensitive product.
Hence there may be a possible source of conflicting information when comparing cleanliness levels recommended
from different sources.
The table gives a selection of maximum contamination levels that are typically issued by component
manufacturers. These relate to the use of the correct viscosity mineral fluid. An even cleaner level may be needed
if the operation is severe, such as high frequency fluctuations in loading, high temperature or high failure risk.
11.8 Hydraulic System Target Cleanliness Levels
Where a hydraulic system user has been able to check cleanliness levels over a considerable period, the
acceptability, or otherwise, of those levels can be verified.
Thus if no failures have occurred, the average level measured may well be one which could be made a bench
mark. However, such a level may have to be modified if the conditions change, or if specific contaminant-sensitive
components are added to the system. The demand for greater reliability may also necessitate an improved
cleanliness level.
The level of acceptability depends on three features:
• The contamination sensitivity of the components
• The operational conditions of the system
• The required reliability and life expectancy
Contamination Codes ISO4409:1999
Corresponding Codes
NAS1638
Recommended
Filtration Degree
Typical Applications
4μm(c)
6μm(c)
14μm(c)
βx200
14
12
9 3 3
High precision and
laboratory servo-systems
17
15
11 6 3-6
Robotic and servo
systems
18
16
13 7 10-12
Very sensitive – high
reliability systems
20
18
14 9 12-15
Sensitive – reliable
systems
21
19
16
10
15-25
General equipment of
limited reliability
23
21
18
12
25-40
Low pressure equipment
not in continuous service

79
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
11.9 New ISO Medium Test Dust and its effect on ISO Contamination Control
Standards
When General Motors gave advance warning to the International Standards Organization (ISO) that it was
intending to stop the production of AC Fine Test Dust (ACFTD), work commenced immediately on finding an
improved replacement dust. ACFTD was used extensively within the fluid power and automotive industries for
calibrating Automatic Particle Counters (APCs) and for the testing of components.
APCs are used for testing oil filters, and also for contaminant sensitivity testing of hydraulic components. For 25
years, APCs have been the main stay in the measurement of solid particles in hydraulic fluids. The growth in
demand for measuring fluid cleanliness in a variety of industrial processes, including fluid power, has resulted in
APCs moving from the laboratory environment out into the factory. In fact, they are now a critical part of many
production processes. It is therefore essential that the data they provide is both accurate and consistent.
Calibration
ACFTD has been used as an artificial contaminant since the 1960s and its original particle size distribution was
determined using an optical microscope. This particle size distribution subsequently formed the basis of ISO 4402,
the method for calibrating APCs. Due to the limitations of that method of measurement, the particle size
distribution was questioned below about 5μm. It was also not traceable to any national standard of measurement
- a critical requirement for today’s quality management systems.
There was also an absence of formal controls over the distribution of the test dust, and batch-to-batch variability
was much greater than is acceptable nowadays.
ISO therefore defined the requirements for the replacement for ACFTD and asked the National Institute of
Standards and Technology (NIST) in the USA to produce a standard, traceable reference material. The new dust’s
particle size distribution has been accurately determined with the aid of modern scanning electron microscope
and image analysis techniques.
ISO Medium Test Dust Benefits
The new ISO Medium Test Dust (ISO MTD) consists of similar materials to the old ACFTD, but to minimize particle
counting errors, it is of a slightly coarser grade because ACFTD included too many particles smaller than 5μm
which gave problems during testing.
ISO MTD is produced to a standard distribution and stringent quality control procedures, thereby ensuring
excellent batch-to-batch repeatability. These procedures, combined with a revised ISO APC calibration method
give:
• A traceable and controlled reference test dust with greatly reduced variation in particle size distribution. This
gives the trace-ability required by ISO 9000, QS9000 and similar quality management systems.
• A procedure for determining the performance of APCs so that minimum acceptable levels can be set by the
user.
• Improved calibration techniques and procedures.
• More accurate calibration.
• Improved levels of particle count reproducibility with different equipment.
• More accurate and consistent filter test results.
Effect on Industry
The introduction of ISO MTD has necessitated changes to certain ISO standards.
The standards affected include:

80
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
ISO 4402:1991 Hydraulic fluid power
Calibration of liquid automatic particle counters.
ISO 4406:1987 Hydraulic fluid power
Code for defining the level of contamination by solid particles
ISO 4572:1981 Hydraulic fluid power – Filters
Multi-pass method for evaluating filtration performance of a filter element
In order that users are not confused by the changes to these standards, particularly by reference to them in
technical literature, ISO is updating 4402 to ISO 11171, and 4572 to ISO 16889.
Two standards which concern our industry are the ISO 4406 coding system and the new ISO 16889 Multi-pass
test. As APCs will henceforth count particles more accurately, there will now be a change in the way sizes are
labelled.
In the new ISO 4406:1999, new calibration sizes are used to give the same cleanliness codes as the ‘old’
calibration sizes of 5 and 15μm. In this way, there will be no necessity to change any system cleanliness
specifications. It is proposed that the cleanliness codes (for APCs) will be formed from three particle counts at 4, 6
and 14μm, with 6 and 14μm corresponding very closely to the previous 5 and 15μm measurements.
This will ensure consistency in data reporting.
As the counts derived by microscope counting methods are not affected, the particle sizes used for microscopy
will remain unchanged (i.e. at 5 and 15μm).
To clarify matters still further, ISO standards written around the new test dust will utilize a new identifier, ‘(c)’.
Hence μm sizes according to the new ISO 11171 will be expresses as ‘μm(c)’ and Beta ratios according to ISO
16889 will be expressed as ‘Bx(c)’, e.g.‘B5(c)’.
However, it must be stressed that the only real effect users will experience will be the improved accuracy in
particle counts - there will be no change in the performance of filters, nor in the ISO cleanliness levels that they
will achieve.
The following charts show the correlation between the old ACFTD and the new ISO MTD.
The CMS is calibrated with ISO Medium Test Dust (to ISO 11171). The correlation between particle sizes and the
ACFTD (old standard) to the ISO MTD (new standard) is as follows:
ACFTD <1 5 15 25 30 50 75 100
ISO MTD 4 6 14 21 25 38 50 70
Correlation
The table shows the correlation between Particle Sizes Obtained using ACFTD (ISO 4402:1991) and NIST (ISO
11171) Calibration Methods
This table is only a guideline.
The exact relationship between ACFTD sizes and the NIST sizes may vary from instrument to instrument
depending on the characteristics of the particle counter and original ACFTD calibration.

81
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Particle Size Obtained Using
ACFTD (ISO
4402:1991) µm
ISO/ NIST MTD
(ISO 11171) µm
(c) 1 4.2
2
4.6
3
5.1
4
5.8
5
6.4
6
7.1
7
7.7
8
8.4
9
9.1
10
9.8
11
10.6
12
11.3
13
12.1
14
12.9
15
13.6
16
14.4
17
15.2
18
15.9
19
16.7
20
17.5
21
18.2
22
19.0
23
19.7
24
20.5
25
21.2
26
22.0
27
22.7
28
23.5
29
24.2
30
24.9
31
25.7
32
26.4
33
27.1
34
27.9
35
28.5
36
29.2
37
29.9
38
30.5
39
31.1
40
31.7

82
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
Other Standards
Although the ISO 4406:1999 standard is being used extensively within the hydraulics industry other standards are
occasionally required and a comparison may be requested.
The following table gives a very general comparison but often no direct comparison is possible due to the
different classes and sizes involved.
ISO4409:1999
DEF.STD 05/42
Table A Table B
NAS 1638
ISO 11218
SAE 749
13/11/8
2
14/12/9
3
0
15/13/10
4
1
16/14/9
400F
16/14/11
5
2
17/15/9
400
17/15/10
800F
17/15/12
6
3
18/16/10
800
18/16/11
1300F
18/16/13
7
4
19/17/11
1300
2000F
19/17/14
8
5
20/18/12
2000
20/18/13
4400F
20/18/15
9
6
21/19/13
4400
6300F
21/19/16
10
22/20/13
6300
22/20/17
11
23/21/14
15000
23/21/18
12
24/22/15
21000
25/23/17
100000

83
As a policy of continual improvement, RMF reserves the right to alter the specification without prior notice.
201.028 REV 1 Date of Issue: 18 June 2018
11.10 Clean Working Practices
The majority of hydraulic systems require cleanliness which controls below around a 40 micron threshold (beyond
the limit of human eyesight). When analyzing particles down to levels of 4um, 6um & 14um you are talking about
objects of a cellular/bacterial size. This creates various challenges, and is starting to drive better and cleaner
working practices in industry. Our products are at the forefront of this challenge, and will help you to manage the
quality and productivity of your systems.
Do’s
• Do use filter breathers on tank tops
• Do use tank designs, which are self-draining (sloped or conical).
• Do use tanks which can be sealed off from the surrounding environment.
• Do exercise care and use funnels when filling tanks with fluid.
• Do utilize stainless steel and methods such as electro-polishing in the design of system components upstream of
your first filter set.
• Do perform off-line analysis in a controlled environment such as a laboratory which should contain fewer
airborne contaminants that where the sample was taken from.
• Do use suitable, glass bottles (ideally certified clean) to take samples, along with a hand pump to reduce
contamination ingress.
• Do filter your system thoroughly before using it in your production process.
• Do perform a statistically large enough sample of particle analysis results (25) to arrive at a base cleanliness
level for your system.
• Do make sure that filters are correctly sized for your applications and cleanliness you are trying to achieve.
Don’ts
• Don’t eat, drink or smoke around critical systems/processes.
• Don’t leave tools, objects, clothing or other materials etc. on surfaces or tanks of critical systems.
• Don’t use open tanks on critical systems.
• Don’t take samples or perform on-line analysis from the top of a reservoir/tank.
• Don’t design/use tanks which contain crevices (internal corners etc.).
• Don’t assume that if a sample looks clean, that it is. You won’t be able to see the contaminants.
• Don’t perform off-line analysis in an “un-controlled” environment. E.g. workshop
• Don’t rely on a single test for a capable representation of your system.
• Don’t start using your system/process until it has gone through a commissioning period whereby contamination
levels are relatively stable.
• Don’t mix fluids into the same system. They can emulsify and eliminate any chance of a reliable particle count.
• Don’t use unsuitable containers to take a fluid sample.
[End of Manual]
 Loading...
Loading...