

Page 1

Page 2

Sehr geehrter Kunde,
Wir freuen uns, dass Sie mit Ihren Kauf uns Ihr Vertrauen und die Möglichkeit gegeben
haben die Vielseigkeit und Qualität eines renkforce Produktes zu beweisen.
Wir wünschen Ihnen viel Freude mit dem Raspberry Pi 3 Experiment-Set
Das Experiment-Set bildet die perfekte Grundlage für Ihren Raspberry. Starten Sie mit
diesem umfangreichen Zubehör-Paket Ihre Experimente und Projekte. Lassen Sie Ihrer
Kreavität freien Lauf und führen Sie mit den Steckbrückenkabeln, Widerständen, LEDS
und Schalter verschiedenste Versuche durch. Eine Verbindung zwischen Raspberry Pi® 3
und der Steckplane lässt sich mit dem Cobbler-Verbindungskit realisieren. Mit dem USB
TTL-Kabel können Sie Ihren Einplanencomputer sogar mit einem PC verbinden.
Das Gehäuse bietet der Plane den nögen Schutz und ermöglicht Zugri auf die
Schnistellen. Die Stromversorgung übernimmt ein Mico-USB Nezteil mit 2000 mA Ausgangsstrom und einer Wechselclip-Funkon für den internaonalen Einsatz. Mit dem vorinstallierten Noobs Betriebssystem auf der MicroSD-Karte können Sie sofort losstarten.
Eine Verbindung mit einem Monitor oder sogar dem Fernseher kann über das beiliegende HDMI™-Kabel hergestellt werden.
Die absolute Vielseigkeit zeichnen das Raspberry Pi® Set desweiteren aus. Setzen Sie es
als Mini-PC in Ihrem Wohnzimmer ein und geben Sie Videos in Full HD über den HDMI™Ausgang wieder oder verbinden Sie ihn mit weiteren Planen über den GPI0-Port um
Steuerungen zu realisieren.
In der folgenden Anleitung haben wir einzelne Beispiele aufgeführt, um Sie in den ersten
Schrien mit dem Raspberry Pi 3 Experiment Set zu begleiten und einen reibungslosen
Einseg zu ermöglichen.
Seite 2
Page 3

Lieferumfang
Raspberry Pi® 3 Model B 1 GB
Gehäuse
Raspberry Pi Micro-USB-Netzteil 2.5 A mit Wechselclips für Europa,
Großbritannien, Australien, USA
Noobs Betriebssystem auf 8 GB MicroSD-Karte
Kühlkörper-Set
HDMI™-Kabel
Cobbler-Verbindungskit
USB TTL-Kabel
Steckplane
Steckbrücken-Verbindungskabel
4x 10 mm LEDs
2x Schaltermodule
Relais
IR-Bewegungsmelder
Seite 3
Page 4

Vorbereitung des Raspberry Pi
Um mit den Raspberry Pi die folgenden Beispiele nutzen zu können, muss dieser
vorab vorbereitet werden. Im Lieferumfang nden Sie neben dem Raspberry Pi 3
auch ein passendes Gehäuse aus Acryl-Glas, welche eine eigene Anleitung für den
Zusammenbau beinhaltet.
Nachdem Sie das Gehäuse mit eingesetzten Raspberry Pi zusammengebaut
haben, setzten Sie die beiliegende microSD-Karte in den entsprechenden Slot an
der Unterseite der Plane ein.
Verbinden Sie darauin per HDMI-Kabel den Raspberry Pi an einen HDMI-fähigen
Bildschirm/Fernseher und schließen Sie an den USB-Buchsen eine handelsübliche
Computermaus und Tastatur an (Alternav: drahtlos Maus-/Tastaturempfänger)
Das in diesem Set enthaltende microUSB Netzteil, hat die Möglichkeit mit
verschiedenen Länderadaptern ausgestaet und somit rund um den Globus
eingesetzt zu werden. Setzten Sie hier den zu Ihrer Wandsteckdose passenden
Adapter auf das Netzteil auf und verbinden Sie das Netzteil auf der einen Seite an
die microUSB-Buchse des Raspberry Pi und auf der anderen Seite mit der
Wandsteckdose.
Der Raspberry Pi 3 sollte nun starten und ein Bild auf dem HDMI-Bildschirm
ausgeben.
Seite 4
Page 5

Vorbereitung des Betriebsystemes
Die beiliegende micro-SD Karte beinhaltet das BetriebssystemInstallaonsprogramm „NOOBS“, welches erlaubt mehrere verschiedene
Betriebssysteme auf dem Raspberry Pi zu nutzen—unter anderem auch als
Oce-PC, als Programmierumgebung oder als Mulmediacenter.
Sollten Sie den Raspberry Pi zusätzlich mit einem Netzwerkkabel an das Internet
angeschlossen haben, sollten Sie eine aktuelle Auswahl an den installierbaren
Betriebsystemen angezeigt bekommen.
Darunter bendet sich auch das Betriebsystem „Raspbian“, welches eine für den
Raspberry Pi angepasste Version der Linux-Distribuon Debian ist (diese wird Ihnen
auch ohne Online-Zugang angezeigt, da dieses auf dieser SD-Karte schon
vorbereitet ist).
Für die folgenden Beispiele empfehlen wir auf Raspbian zu setzen und zeigen im
folgenden auf, wie dieses zu installieren ist:
Wählen Sie zu allererst das Betriebssystem aus, indem Sie das Kreuz in das
vorgesehene Kästchen mit einem Linksklick setzen—danach starten Sie die
Installaon mit einem Drücken auf den Punkt „Install (i)“
Seite 5
Page 6

Die darauolgende Meldung bestägen Sie mit einen Drücken auf „Yes“
Danach wird die Installaon gestartet; diese dauert in der Regel 10-15 Minuten.
Seite 6
Page 7

Nach der Installaon können wir diese mit einem Drücken auf OK beenden.
Danach bootet der Raspberry Pi in das Betriebssystem Raspbian.
Seite 7
Page 8

Kommunikaon mit dem PC über die serielle Schnistelle
In diesem Set enthalten nden Sie ein USB-TTL Adapterkabel. Dieses ermöglicht
Ihnen mit diversen Mikrokontroller– und Einplanencomputersystemen zu
kommunizieren—sei es die Überprüfung von Messwerten, Eingabe von
Parametern oder die Steuerung des Betriebssystems über eine Terminalkonsole.
Letztere Möglichkeit ist im Betriebsystem Raspbian des Raspberry Pi enthalten.
Über die serielle Schnistelle auf den Pins 8 [TXD] und 10 [RXD] auf dem
GPIO-Header des Raspberry Pi, lässt sich somit eine Verbindung zur
Terminalkonsole auauen und Befehle für das Betriebsystem eingeben, ohne dass
eine Verbindung per Netzwerk aufgebaut oder ein Bildschirm per HDMI
angeschlossen werden muss.
Hierzu gehen Sie wie folgt vor:
Schließen Sie das große Datenkabel auf die
GPIO-Leiste auf, wie es auf dem Bild auf
der rechten Seite gezeigt wird. Achten Sie
hierbei darauf, dass die rot markierte Seite
des Kabels nach außen zeigt.
Seite 8
Page 9

Hiernach setzen Sie die Cobbler
Verbindungplane auf das Steckbre
auf und verbinden das Datenkabel,
welches vom Raspberry Pi kommt.
Setzen Sie nun in die Verbindungsstücke
des USB-TTL Verbindungskabels die
Pin-Sadapter ein; diese Sind im
beiliegenden Kabel-Set enthalten.
Nun haben Sie die Möglichkeit die
Verbindungsstücke des USB-TTL Kabels
in das Steckbre zu stecken.
Auf der Cobbler Verbindungsplane,
sehen Sie die entsprechenden
Pinbezeichnungen des Raspberry Pi‘s
aufgedruckt.
Die Verbindung muss nun wie folgt
aufgebaut werden:
USB-TTL [TX] [Grün] - > Raspberry Pi [RX]
USB-TTL [RX] [Weiß] - > Raspberry Pi [TX]
USB-TTL [GND] [Schwarz] - > Raspberry Pi [GND]
*Das rote Kabel muss nicht angeschlossen werden
Seite 9
Page 10

Hiernach können Sie das andere Ende des USB-TTL-Kabels in einen freien USB-Port
Ihres PC stecken. Sollten Sie bislang den Raspberry Pi nicht vorbereitet haben,
stecken Sie nun die beiliegende microSD Karte in den dazugehörigen Slot auf der
Unterseite und verbinden Sie das microUSB-Netzteil an den microUSB Eingang des
Raspberry Pi. Stecken Sie das Netzteil noch nicht in die Wandsteckdose an.
Die folgenden Schrie sind abhängig von Ihrem verwendeten Betriebsystem—im
Folgenden zeigen wir auf, wie Sie die Terminal-Verbindung an einem Windows-PC
durchführen können; die Vorgehensweise auf anderen Betriebsystemen sind
jedoch in ihren Grundzügen ähnlich.
Für die Verbindung zur Terminalkonsole verwenden wir das Programm Puy.
Dieses ist als Freeware unter hp://www.puy.org/ zum Download verfügbar und
wurde unter der MIT License veröentlicht.
Laden Sie die „puy.exe“ auf der o.g. Website herunter und starten Sie das
Programm. Sie Sehen nun die folgende Maske—Dort müssen die beschriebenen
Werte eingefügt bzw. geändert werden:
Seite 10
Page 11

*Die unter Punkt 1 aufgezeigte COM-Nummer ist abhängig von Ihrem
verwendeten System und kann variieren. Um die richge COM-Nummer zu
erhalten, gehen Sie in den Windows Gerätemanager und schauen nach, welche
COM-Nummer dem USB-TTL Kabel vom Betriebsystem vergeben wurde.
Hierzu gehen Sie im Gerätemanager unter „Anschlüsse“
In unserem Fall ist dies COM7. Sollten Sie jedoch ein gelbes Ausrufezeichen neben
dem „USB-to-Serial“ Adapter-Symbol haben, wie im folgenden Bild…
… so ist die Treiber-Installaon von Windows für den Adapter noch nicht
vollständig. Um diese abzuschließen, folgen Sie bie der Treiber-Installaon
Anleitung im folgenden Link.
Seite 11
Page 12

Nach dieser Vorkonguraon kann mit einem Drücken auf „Open“ die serielle Verbindung aufgebaut werden.
Zu allererst wird Ihnen nur ein schwarzes Fenster gezeigt—nun können Sie das
Netzteil in die Wandsteckdose stecken und somit den Raspberry Pi 3 starten.
Nun sollte nach kurzer Zeit die Terminalausgabe beginnen
Seite 12
Page 13

Nachdem das Betriebsystem komple hochgefahren ist, wird als letzte Zeile
„raspberrypi login:“ angezeigt. Nun können Sie sich anmelden indem Sie „pi“ als
Benutzernamen und „raspberry“ als passwort eingeben und die jeweiligen
Eingaben mit Enter bestägen (das Passwort wird bei der Eingabe nicht angezeigt;
dieses muss man nach der Eingabe „blind“ bestägen)
Danach sind Sie mit dem Raspbian Terminal per serieller
Kommunikaonsschnistelle verbunden.
Seite 13
Page 14
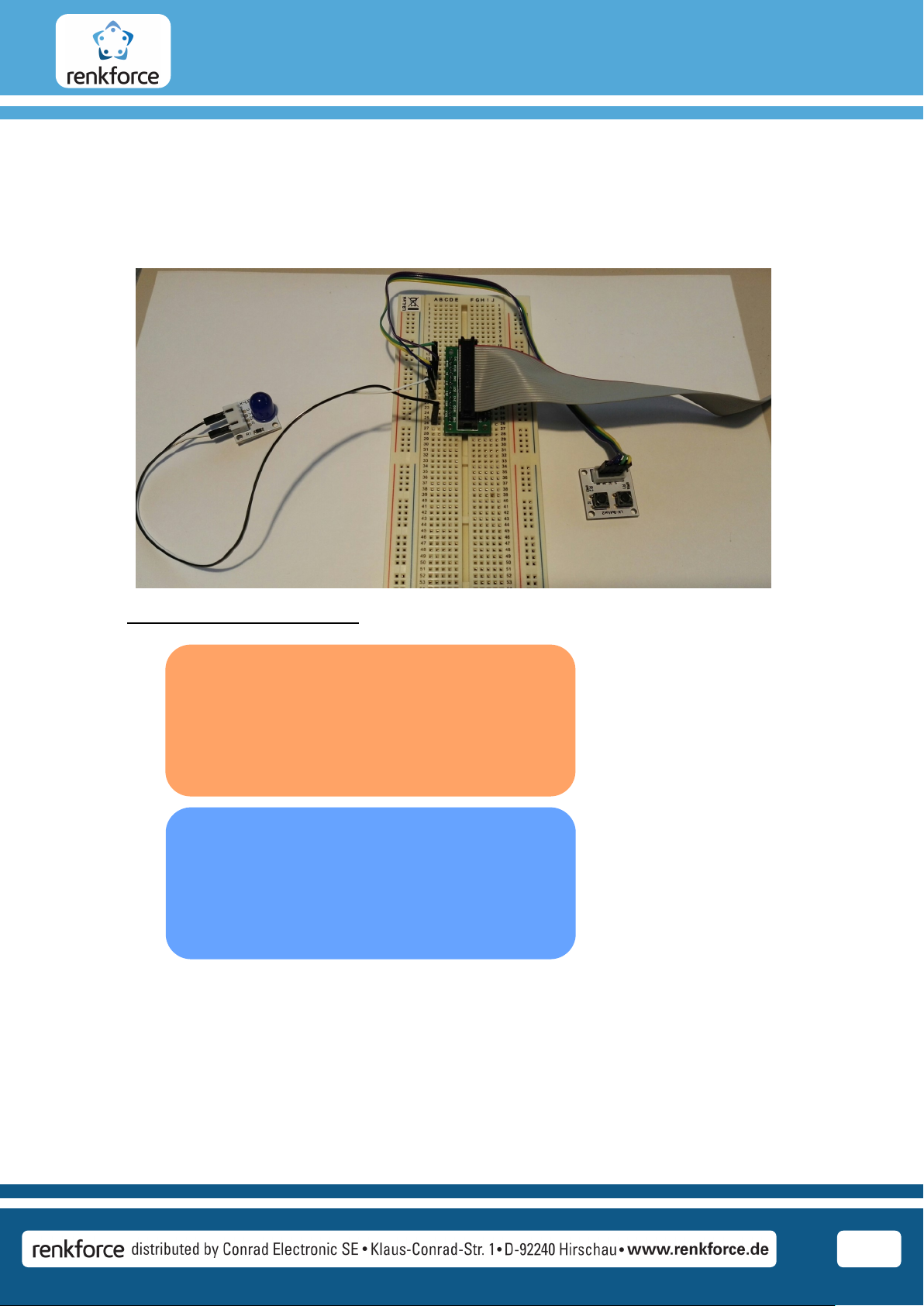
Abfrage eines Buons / Leuchten einer LED miels Python
Schließen die beiliegenden Komponenten, wie auf dem folgenden Bild an
Pin-Verbindungsübersicht:
Buon-Module:
S1 ——> GPIO4 / #4 [Raspberry Pi]
S2 ——> GPIO17 / #17 [Raspberry Pi]
V ——> 3V3
G ——> GND [Raspberry Pi]
LED-Module:
S1 ——> GPIO22 / #22 [Raspberry Pi]
S2 ——> nicht verbunden
V ——> nicht verbunden
G ——> GND [Raspberry Pi]
Seite 14
Page 15

Nachdem alles angeschlossen ist, muss nun die Datei mit dem ausführenden
Programm generiert werden. Dazu verbinden Sie sich mit dem Terminal des
Raspbian Betriebssystems und geben den folgenden Befehl ein…
… um die Datei „LED_Buon_Test.py“ zu erstellen. Nun benden Sie sich im Editor.
Im folgenden sehen Sie ein Code-Beispiel geschrieben in der Code-Sprache Python.
Dieses muss nun in den Editor kopiert werden.
nano LED_Button_Test.py
# Benoetigte Module werden importiert und eingerichtet
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
# Hier wird der Eingangs-Pin deklariert, an dem der Button angeschlossen ist.
Button_S1_PIN = 4
# Hier wird der Ausgang-Pin deklariert, an dem die LED angeschlossen ist.
LED_PIN = 22
GPIO.setup(Button_S1_PIN, GPIO.IN)
GPIO.setup(LED_PIN, GPIO.OUT)
print "Button-LED-Test [druecken Sie STRG+C, um den Test zu beenden]"
# Hauptprogrammschleife
try:
while True:
if (GPIO.input(Button_S1_PIN) == 1):
GPIO.output(LED_PIN,1)
else:
GPIO.output(LED_PIN,0)
# Aufraeumarbeiten nachdem das Programm beendet wurde
except KeyboardInterrupt:
GPIO.cleanup()
* Vorsicht beim kopieren/abschreiben: Bei der Programmiersprache Python sind
die Einrückungen von Bedeutung; dadurch wird eine Programmstruktur aufgebaut*
Nachdem man den Code kopiert hat, kann man den Editor mit der
Tastenkombinaon „Strg+X“ beenden. Man wird dann gefragt, ob man die Datei
speichern möchte, was man mit „Y“ bestägen muss.
Seite 15
Page 16

Nachdem man nach dem Schließen des Editors wieder im Terminal gelangt, kann
man nun das Programm mit folgenden Befehl starten:
Wird nun der rechte Buon1 gedrückt, so leuchtet die LED auf.
sudo python LED_Button_Test.py
Das Programm kann man danach mit Drücken der Tastenkombinaon „Strg+C“
beenden.
Seite 16
Page 17
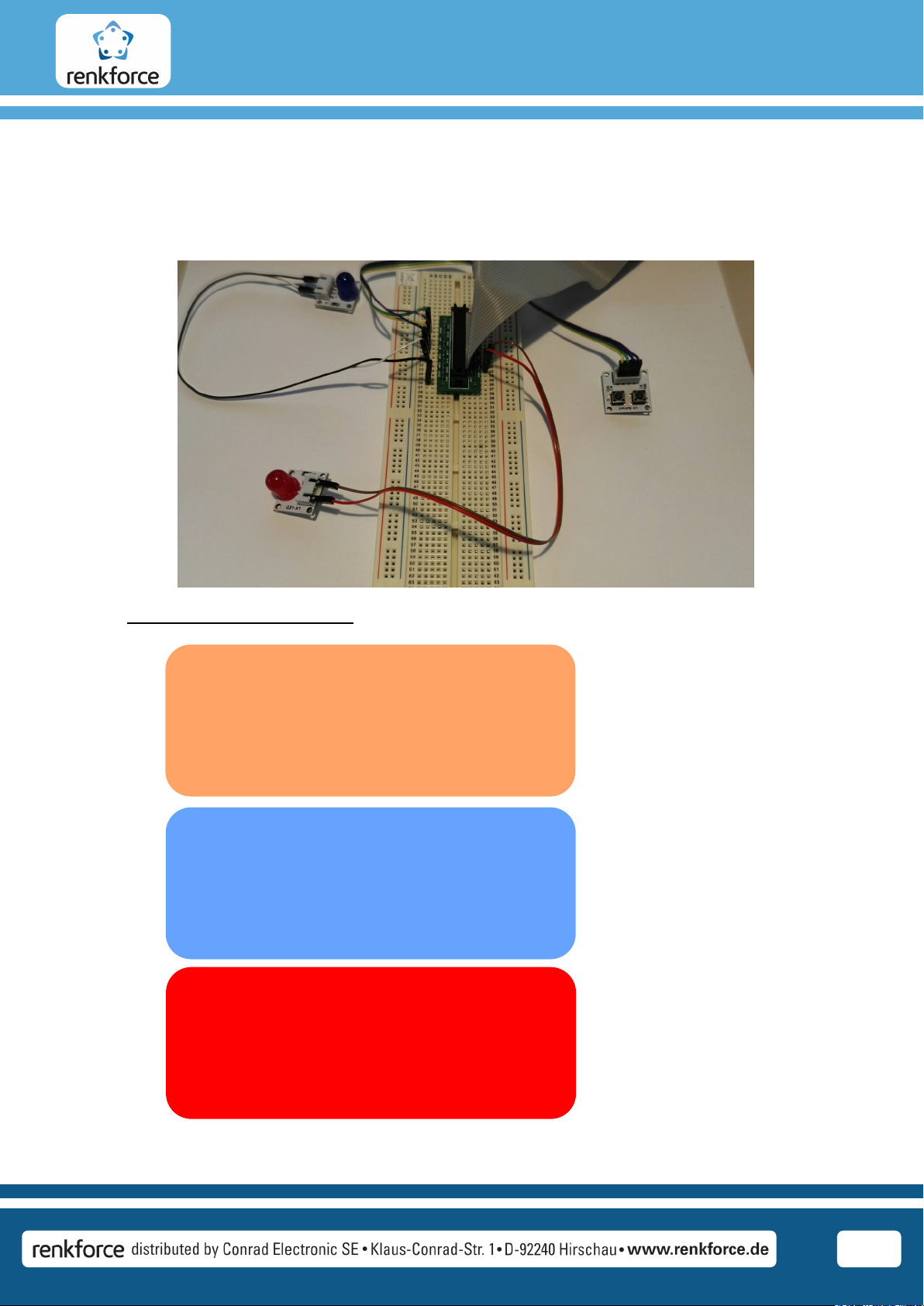
Erweiterung des Beispiels um eine zweite LED
Schließen die beiliegenden Komponenten, wie auf dem folgenden Bild an
Pin-Verbindungsübersicht:
Buon-Module:
S1 ——> GPIO4 / #4 [Raspberry Pi]
S2 ——> GPIO17 / #17 [Raspberry Pi]
V ——> 3V3
G ——> GND [Raspberry Pi]
LED-Module-Blau:
S1 ——> GPIO22 / #22 [Raspberry Pi]
S2 ——> nicht verbunden
V ——> nicht verbunden
G ——> GND [Raspberry Pi]
LED-Module-Rot:
S1 ——> GPIO24 / #24 [Raspberry Pi]
S2 ——> nicht verbunden
V ——> nicht verbunden
G ——> GND [Raspberry Pi]
Seite 17
Page 18

Das vorherige Beispiel kann, da auf dem Buon-Modul zwei Knöpfe vorhanden
sind, um eine zweite LED erweitert werden. Hierzu geben Sie folgenden Befehl...
… in die Konsole ein, um die Datei „2LED_2Buon_Test.py“ zu erstellen.
Das Code-Beispiel von vorhin, ist im Folgenden in einer abgeänderten Fassung, in
der der zweite Knopf und die zweite LED integriert sind.
nano 2LED_2Button_Test.py
# Benoetigte Module werden importiert und eingerichtet
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
# Hier wird der Eingangs-Pin deklariert, an dem der Button angeschlossen ist.
Button_S1_PIN = 4
Button_S2_PIN = 17
# Hier wird der Ausgang-Pin deklariert, an dem die LED angeschlossen ist.
LED_BLAU_PIN = 22
LED_ROT_PIN = 24
GPIO.setup(Button_S1_PIN, GPIO.IN)
GPIO.setup(Button_S2_PIN, GPIO.IN)
GPIO.setup(LED_BLAU_PIN, GPIO.OUT)
GPIO.setup(LED_ROT_PIN, GPIO.OUT)
print "Button-LED-Test [druecken Sie STRG+C, um den Test zu beenden]"
# Hauptprogrammschleife
try:
while True:
if (GPIO.input(Button_S1_PIN) == 1):
GPIO.output(LED_BLAU_PIN,1)
else:
GPIO.output(LED_BLAU_PIN,0)
if (GPIO.input(Button_S2_PIN) == 1):
GPIO.output(LED_ROT_PIN,1)
else:
GPIO.output(LED_ROT_PIN,0)
# Aufraeumarbeiten nachdem das Programm beendet wurde
except KeyboardInterrupt:
GPIO.cleanup()
Seite 18
Page 19

Nachdem man nach dem Schließen des Editors wieder im Terminal gelangt, kann
man nun das Programm mit folgenden Befehl starten:
Wird nun der rechte Buon1 gedrückt, so leuchtet die blaue LED auf.
sudo python 2LED_2Button_Test.py
Wird der linke Buon2 gedrückt, so leuchtet nun die rote LED auf.
Seite 19
Page 20

Knopf durch Bewegungsmelder ersetzen
Schließen die beiliegenden Komponenten, wie auf dem folgenden Bild an
Pin-Verbindungsübersicht:
PIR-Modul:
S1 ——> GPIO4 / #4 [Raspberry Pi]
S2 ——> nicht verbunden
V ——> 3V3
G ——> GND [Raspberry Pi]
LED-Module-Rot:
S1 ——> GPIO24 / #24 [Raspberry Pi]
S2 ——> nicht verbunden
V ——> nicht verbunden
G ——> GND [Raspberry Pi]
Seite 20
Page 21

Ansta , dass ein Knopf gedrückt werden muss um die LED leuchten zu lassen, kann
auch das PIR-Modul verwendet, was die Funkon eines Bewegungsmelders
beinhaltet. Geben Sie folgenden Befehl...
… in die Konsole ein, um die Datei „PIR_LED_Test.py“ zu erstellen und kopieren Sie
das unten stehende Codebeispiel in den Editor.
nano PIR_LED_Test.py
# Benoetigte Module werden importiert und eingerichtet
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
# Hier wird der Eingangs-Pin deklariert, an dem der PIR-Sensor
# angeschlossen ist. Vorkonfiguriert ist hierbei der LinkerKit Port:
# [12|13|V|G]
GPIO_PIN = 4
GPIO.setup(GPIO_PIN, GPIO.IN)
# Hier wird der Ausgangs-Pin deklariert, an dem z.B. eine Ausgabe LED
# oder ein LinkerKit Buzzer angeschlossen ist. Vorkonfiguriert ist
# hierbei der LinkerKit Port: [15|16|V|G]
OUTPUT_PIN = 24
GPIO.setup(OUTPUT_PIN, GPIO.OUT)
print "PIR-Sensor-Test [druecken Sie STRG+C, um den Test zu beenden]"
# Diese AusgabeFunktion wird bei Signaldetektion ausgefuehrt
def ausgabeFunktion(null):
print("Bewegung erkannt")
# Das Hauptprogramm wird solange unterbrochen, solang der
# Sensor an seinem Ausgang die Detektion der Bewegung ausgibt
# (3s). Dabei wird am Ausgangs-Pin ebenfalls ein Signal
# ausgegeben...
GPIO.output(OUTPUT_PIN,True)
while (GPIO.input(GPIO_PIN)):
time.sleep(1)
# ...und danach wieder ausgeschaltet
GPIO.output(OUTPUT_PIN,False)
# Beim Detektieren eines Signals (fallende Signalflanke) wird die
# Ausgabefunktion ausgeloest
GPIO.add_event_detect(GPIO_PIN, GPIO.RISING, callback=ausgabeFunktion, bouncetime=100)
# Hauptprogrammschleife
try:
while True:
time.sleep(1)
# Aufraeumarbeiten nachdem das Programm beendet wurde
except KeyboardInterrupt:
GPIO.cleanup()
Seite 21
Page 22

Nachdem man nach dem Schließen des Editors wieder im Terminal gelangt, kann
man nun das Programm mit folgenden Befehl starten:
Wird nun vor dem PIR-Modul eine Bewegung erkannt, so leuchtet die LED auf.
sudo python PIR_LED_Test.py
Die maximale Reichweite der Bewegungserkennung kann über den
Empndlichkeitsregler an der Unterseite des PIR-Moduls miels eines
Kreuzschraubenziehers zwischen 3m und 6m eingestellt
werden. (Das Einstell-Potenometer hat hierbei kein Anfangs- und Endpunkt)
Seite 22
 Loading...
Loading...