

Page 1

M30620T2-RPD-E
Emulation Pod for M16C/62,62A Group MCUs
User's Manual
Rev. 1.00
July 1, 2003
REJ10J0196-0100Z
Page 2

* IC61-1004-051 is a trademark of Yamaichi Electronics Co., Ltd.
* NQPACK, YQPACK, YQSOCKET, YQ-Guide, HQPACK, TQPACK and TQSOCKET are trademarks of Tokyo Eletech Corporation.
• Renesas Technology Corporation and Renesas Solutions Corporation put the maximum effort into making semiconductor products better
and more reliable, but there is always the possibility that trouble may occur with them. Trouble with semiconductors may lead to personal
injury, fire or property damage. Remember to give due consideration to safety when making your circuit designs, with appropriate
measures such as (i) placement of substitutive, auxiliary circuits, (ii) use of nonflammable material or (iii) prevention against any
malfunction or mishap.
• These materials are intended as a reference to assist our customers in the selection of the Renesas Technology product best suited to
the customer's application; they do not convey any license under any intellectual property rights, or any other rights, belonging to Renesas
Technology Corporation, Renesas Solutions Corporation or a third party.
• Renesas Technology Corporation and Renesas Solutions Corporation assume no responsibility for any damage, or infringement of any
third-party's rights, originating in the use of any product data, diagrams, charts, programs, algorithms, or circuit application examples
contained in these materials.
• All information contained in these materials, including product data, diagrams, charts, programs and algorithms represents information
on products at the time of publication of these materials, and are subject to change by Renesas Technology Corporation and Renesas
Solutions Corporation without notice due to product improvements or other reasons. It is therefore recommended that customers contact
Renesas Technology Corporation, Renesas Solutions Corporation or an authorized Renesas Technology product distributor for the latest
product information before purchasing a product listed herein. The information described here may contain technical inaccuracies or
typographical errors. Renesas Technology Corporation and Renesas Solutions Corporation assume no responsibility for any damage,
liability, or other loss rising from these inaccuracies or errors. Please also pay attention to information published by Renesas Technology
Corporation and Renesas Solutions Corporation by various means, including the Renesas home page (http://www.renesas.com).
• When using any or all of the information contained in these materials, including product data, diagrams, charts, programs, and algorithms,
please be sure to evaluate all information as a total system before making a final decision on the applicability of the information and
products. Renesas Technology Corporation and Renesas Solutions Corporation assume no responsibility for any damage, liability or
other loss resulting from the information contained herein.
• Renesas Technology semiconductors are not designed or manufactured for use in a device or system that is used under circumstances
in which human life is potentially at stake. Please contact Renesas Technology Corporation, Renesas Solutions Corporation or an
authorized Renesas Technology product distributor when considering the use of a product contained herein for any specific purposes,
such as apparatus or systems for transportation, vehicular, medical, aerospace, nuclear, or undersea repeater use.
• The prior written approval of Renesas Technology Corporation and Renesas Solutions Corporation is necessary to reprint or reproduce
in whole or in part these materials.
• If these products or technologies are subject to the Japanese export control restrictions, they must be exported under a license from the
Japanese government and cannot be imported into a country other than the approved destination. Any diversion or reexport contrary to
the export control laws and regulations of Japan and/or the country of destination is prohibited.
• Please contact Renesas Technology Corporation or Renesas Solutions Corporation for further details on these materials or the products
contained therein.
Keep safety first in your circuit designs!
Notes regarding these materials
• This product is a development supporting unit for use in your program development and evaluation stages. In mass-producing your
program you have finished developing, be sure to make a judgment on your own risk that it can be put to practical use by performing
integration test, evaluation, or some experiment else.
• In no event shall Renesas Solutions Corporation be liable for any consequence arising from the use of this product.
• Renesas Solutions Corporation strives to cope with the issues given below at some charge or without charge.
(1) Repairing or replacing a flawed product. There can be instances in which a product cannot be repaired if more than one year have
passed since the discontinuance of its marketing.
(2) Renovating or providing a workaround for product malfunction. This does not necessarily mean that Renesas Solutions Corporation
guarantees the renovation or the provision under any circumstances.
• This product has been developed by assuming its use for program development and evaluation in laboratories. Therefore, it does not fall
under the application of Electrical Appliance and Material Safety Law and protection against electromagnetic interference when used in
Japan.
• Do not attempt to modify this equipment. If modified, your authority to operate this equipment might be voided by FCC.
Note: This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to part 15 of the FCC Rules.
These limits are designed to provide reasonable protection against harmful interference when the equipment is operated in a commercial
environment. This equipment generates, uses, and can radiate radio frequency energy and, if not installed and used in accordance with
the instruction manual, may cause harmful interference to radio communications. Operation of this equipment in a residential area is likely
to cause harmful interference in which case the user will be required to correct the interference at his own expense.
Warning: This is a Class A product. In a domestic environment this product may cause radio interference in which case the user may be
required to take adequate measures.
For inquiries about the contents of this document or product, fill in the text file the installer of the emulator debugger generates in the
following directory and email to your local distributor.
\SUPPORT\Product-name\SUPPORT.TXT
Renesas Tools Homepage http://www.renesas.com/en/tools
Precautions to be taken when using this product
( 2 / 78 )
Page 3
Preface
The M30620T2-RPD-E is an emulation pod for the M16C/62 and M16C/62A Groups of 16-bit
microcomputers. It's used with a PC4701 emulator.
This user's manual mainly describes functions of the M30620T2-RPD-E emulation pod and how to
operate it. For details on the following products, which are used with M30620T2-RPD-E, refer to
each product's user's manual.
• Emulator: PC4701M/PC4701HS/PC4701L User's Manual
• Emulator debugger: M3T-PD30 User's Manual
All the components of this product are shown in "2.2 Package Components" (page 19) of this user's
manual. If there is any question or doubt about this product, contact your local distributor.
To use the product properly
Precautions for Safety
• In both this user's manual and on the product itself, several icons are used to insure
proper handling of this product and also to prevent injuries to you or other persons,
or damage to your properties.
• The icons' graphic images and meanings are given in "Chapter 1. Precautions for
Safety". Be sure to read this chapter before using the product.
When using outside Japan
• When using in Europe, the United States, or Canada, be sure to use both the emulator
(PC4701M, PC4701HS or PC4701L) and the emulation pod which meet overseas
standards. EMI standards are not met when the M30620T2-RPD-E is used with the
PC4700H or PC4700L emulator.
( 3 / 78 )
Page 4

Contents
Chapter 1. Precautions for Safety ...........................................................................................7
1.1 Safety Symbols and Meanings ..............................................................................8
Chapter 2. Preparation ..........................................................................................................17
2.1 Terminology ........................................................................................................18
2.2 Package Components ..........................................................................................19
2.3 Other Tool Products Required for Development ................................................19
2.4 Name of Each Part ..............................................................................................20
(1) System Configuration...............................................................................20
(2) Inside of Emulation Pod...........................................................................21
2.5 When Using the Emulator for the First Time......................................................22
Chapter 3. Setting Up ...........................................................................................................23
3.1 Removing the Upper Cover ................................................................................24
3.2 Setting Switches and Pullup Resistor..................................................................25
3.3 Selecting Clock Supply .......................................................................................29
(1) Using the Oscillator Circuit on Target System ........................................30
(2) Changing the Internal Oscillator Circuit of Emulation Pod.....................31
(3) Replacing the Oscillator Circuit Boards ..................................................32
3.4 Connecting the PC4701 and Emulation Pod.......................................................33
(1) Connecting the Cable to the PC4701 .......................................................33
(2) Connecting the Cable to the Emulation Pod ............................................34
3.5 Connecting the Target System ............................................................................35
Chapter 4. Usage ..................................................................................................................37
4.1 Turning On the Power .........................................................................................38
(1) Checking the Connection of the Emulator System ..................................38
(2) Turning On the Power ..............................................................................38
(3) LED Display When PC4701 Starts Up Normally....................................39
4.2 Downloading Firmware ......................................................................................40
(1) When It is Necessary to Download Firmware .........................................40
(2) Downloading Firmware in Maintenance Mode .......................................40
4.3 Self-check............................................................................................................41
(1) Self-check Procedure ...............................................................................41
(2) If an Error is Detected in the Self-check ..................................................41
Chapter 5. Specifications......................................................................................................43
5.1 Specifications ......................................................................................................44
5.2 Operation Timing in Memory Expansion and Microprocessor Modes (5 V) .....45
(1) Separate Bus, No-wait..............................................................................45
( 4 / 78 )
Page 5
(2) Separate Bus, With Wait, Accessing External Memory Area .................47
(3) Multiplex Bus, With Wait, Accessing External Memory Area ...............49
(4) Timing Requirements...............................................................................51
5.3 Operation Timing of Memory Expansion and Microprocessor Modes (3 V).....53
(1) Separate Bus, No-wait..............................................................................53
(2) Separate Bus, With Wait, Accessing External Memory Area .................55
(3) Multiplex Bus, With Wait, Accessing External Memory Area ...............57
(4) Timing Requirements...............................................................................59
5.4 Electrical Characteristics.....................................................................................61
5.5 Connection Diagram ...........................................................................................62
5.6 External Dimensions ...........................................................................................64
(1) External Dimensions of Emulation Pod...................................................64
(2) External Dimensions of Pitch Converter Board (FLX-100LCC) ............65
Chapter 6. Troubleshooting ..................................................................................................67
6.1 Flowchart to Remedy the Troubles .....................................................................68
6.2 When the Emulator Debugger Does Not Start Up Properly ...............................69
(1) When the LED Display of PC4701 is Abnormal .....................................69
(2) Errors Occur When the Emulator Debugger Starts up
(When the target system is connected)....................................70
(3) Errors Occur When the Emulator Debugger Starts up
(When the target system is not connected) .............................71
6.3 Operation Differs from That of PROM Version MCUs .....................................71
(1) Does Not Operate with Operating Frequencies (3.6 V to 5.5 V) Properly ..71
(2) Does Not Operate with Operating Frequencies (2.7 V to 3.6 V) Properly ..71
(3) Cannot Reset from Target System............................................................71
(4) Data Values of ROM Area at Power-on Are Different ............................72
(5) HOLD* control.........................................................................................72
(6) A-D Conversion Values are Different from Expected Values ....................72
(7)
Outputs of ALE, Address and Others are Different from Those of Actual MCUs ..
72
Chapter 7. Maintenance and Guarantee................................................................................73
7.1 Maintenance ........................................................................................................74
7.2 Guarantee ............................................................................................................74
7.3 Repair Provisions ................................................................................................74
7.4 How to Request for Repair..................................................................................75
( 5 / 78 )
Page 6

MEMO
( 6 / 78 )
Page 7
Chapter 1. Precautions for Safety
This chapter describes precautions for using this product safely and properly. For precautions for the emulator main unit
and the emulator debugger, refer to each user's manual included with your product.
1.1 Safety Symbols and Meanings .....................................................................................................8
WARNING
CAUTION
IMPORTANT
Warning for Installation...............................................................................................9
Warnings for Use Environment ................................................................................... 9
Caution to Be Taken for Modifying This Product ....................................................... 9
Cautions to Be Taken for This Product........................................................................9
Note on Malfunctions in the PC4701 System.............................................................. 9
Notes on Downloading Firmware..............................................................................10
Notes on Target System ............................................................................................. 10
Note on Reset Input ................................................................................................... 10
Notes on Watchdog Function.....................................................................................10
Note on When the Emulator Debugger Ends............................................................. 10
Note on DMA Transfer..............................................................................................11
Note on Setting the Work Area.................................................................................. 11
Notes on Stack Area...................................................................................................11
Note on Address 0 Access .........................................................................................11
Note on Stop and Wait Modes ................................................................................... 11
Notes on MAP References and Settings ....................................................................12
Notes on Software Breaks and Hardware Breaks ...................................................... 12
Note on BRK Instruction ........................................................................................... 12
Note on NMI* Input...................................................................................................13
Note on HOLD* Input ............................................................................................... 13
Notes on Address Match Interrupt.............................................................................13
Note on Software Reset ............................................................................................. 13
Note on Protect Resistor (PRC2) ...............................................................................13
Note on Pullup Control Resistor ................................................................................ 13
Note on Differences between Actual MCU and Emulator ........................................14
Note on Switch Settings According to Operation Voltage ........................................16
( 7 / 78 )
Page 8
Chapter 1. Precautions for Safety
In both the user's manual and on the product itself, several icons are used to insure proper handling
of this product and also to prevent injuries to you or other persons, or damage to your properties.
This chapter describes the precautions which should be taken in order to use this product safely and
properly. Be sure to read this chapter before using this product.
1.1 Safety Symbols and Meanings
If the requirements shown in the "WARNING"
WARNING
CAUTION
IMPORTANT
In addition to the three above, the following are also used as appropriate.
sentences are ignored, the equipment may
cause serious personal injury or death.
If the requirements shown in the "CAUTION"
sentences are ignored, the equipment may
malfunction.
It means important information on using this
product.
means WARNING or CAUTION.
Example: CAUTION AGAINST AN ELECTRIC SHOCK
means PROHIBITION.
Example: DISASSEMBLY PROHIBITED
means A FORCIBLE ACTION.
Example:
The following pages describe the symbols "WARNING", "CAUTION", and "IMPORTANT".
UNPLUG THE POWER CABLE FROM THE RECEPTACLE.
( 8 / 78 )
Page 9
WARNING
Warning for Installation:
• Do not set this product in water or areas of high humidity. Spilling water or some other liquid into
the main unit can cause an unrepairable damage.
Warnings for Use Environment:
• The emulation pod is air-cooled with the ventilation slot. Therefore, do not block the ventilation
slot. When heated to high temperatures, the emulation pod may not work properly.
• This equipment is to be used in an environment with a maximum ambient temperature of 35°C. Care
should be taken that this temperature is not exceeded.
CAUTION
Caution to Be Taken for Modifying This Product:
• Do not disassemble or modify this product. Disassembling or modifying this product can cause
damage. Disassembling and modifying the product will void your warranty.
Cautions to Be Taken for This Product:
• Use caution when handling the main unit. Be careful not to apply a mechanical shock.
• Do not touch the connector pins of the emulator main unit and the target MCU connector pins
directly with your hand. Static electricity may damage the internal circuits.
• Do not pull the emulation pod main unit by the flexible cable (FLX120-RPD) for connecting to the
emulator main unit or the flexible cable (FLX64, FLX100 or FLX160) for connecting the target
system. The cable may cause a break.
• Flexible cable (FLX120-RPD) for connecting to the emulator main unit and the flexible cable
(FLX64, FLX100 or FLX160) for connecting the target system are different from earlier models.
The slits make them more flexible. However, excessive flexing or force may break conductors.
•Do not use inch-size screws for this equipment. The screws used in this equipment are all ISO
(meter-size) type screws. When replacing screws, use same type screws as equipped before.
IMPORTANT
Note on Malfunctions in the PC4701 System
• If the emulator malfunctions because of interference like external noise, do the following to remedy
the trouble.
(1) Press the RESET switch on the emulator front panel.
(2) If normal operation is not restored after step (1), shut OFF power to the emulator once and then
reactivate it.
( 9 / 78 )
Page 10
IMPORTANT
Notes on Downloading Firmware:
• Before using this product for the first time, it is necessary to download the dedicated firmware
(control software for the emulation pod built into the PC4701). Please note that, to do this, it is
necessary to start up the PC4701 in the maintenance mode. For firmware download procedures, see
"4.2 Downloading Firmware" (page 40). Once the firmware has been downloaded, the product can
be used by simply turning on the power.
• Do not shut off the power while downloading the firmware. If this happens, the product will not
start up properly. If power is shut off unexpectedly, redownload the firmware.
• Except when a target status error occurs, if the self-check is not completed successfully, there may
be trouble with the product. In such case, contact your sales representative. However, perform the
self-check in the below setup.
(1) Target system: Not connected
(2) Emulation pod internal switches: At their factory settings
Notes on Target System:
• The Vcc pin of emulator is connected to the target system to observe the voltage of the target system.
Therefore design your system so that the emulator MCU is powered by the target system.
• The voltage of the target system should be within the range of the MCU specification.
•Do not change the voltage of the target system after turning on the power.
• Before powering on your emulator system, check that the host machine, the emulator main unit,
the converter board and target system are all connected correctly. Next, turn on the power to each
equipment following the procedure below.
(1) Turn ON/OFF the target system and the PC4701 emulator as simultaneously as possible.
(2) When the PC4701 and emulator debugger start up, check the target status LEDs on the
emulator main unit's front panel to see if this product is ready to operate.
• Is the power supplied? Check that target status LED (POWER) is ON.
For details, refer to "Chapter 4. Usage" (page 37).
Note on Reset Input:
• The reset input from the target system is accepted only while a user program is being executed (only
while the RUN status LED on the PC4701's front panel is lit).
Notes on Watchdog Function:
• The MCU's watchdog timer can be used only while programs are being executed. To use it
otherwise, disable the timer.
• If the reset circuit of the target system has a watchdog timer, disable it when using the emulator.
Note on When the Emulator Debugger Ends:
• To restart the emulator debugger after it ends, always shut power to the emulator module off once
and then on again.
( 10 / 78 )
Page 11
IMPORTANT
Note on DMA Transfer:
•With this product, the program is stopped with a loop program to a specific address. Therefore, if
a DMA request is generated by a timer or other source while the program is stopped, DMA transfer
is executed. However, make note of the fact that DMA transfer while the program is stopped may
not be performed correctly. Also note that the below registers have been changed to generate DMA
transfer as explained here even when the program is stopped.
DMA0 transfer counter register TCR0
DMA1 transfer counter register TCR1
Note on Setting the Work Area:
• To use this product, it is necessary to set the work area in the internal reserved area of the MCU.
However, do not set it in the last 10 bytes of the internal reserved area. And be sure to set the internal
reserved area to INTERNAL. (Set the work area by INIT window of the emulator debugger M3TPD30.)
Example 1: When debugging the program of the MCU whose internal reserved area is 02C00
03FFF16 address, set the work area within the range of 02C0016 to 03FF616 address.
Example 2: When debugging the program of the MCU whose internal reserved area is 0540016 to
05FFF16 address, set the work area within the range of 0540016 to 05FF616 address.
For instance, when setting the work area at 05C0016, the emulator uses 10 bytes area of 05C0016 to
05C0916.
Notes on Stack Area:
•With this product, a maximum 8 bytes of the user stack is consumed.
• If the user stack does not have enough area, do not use areas which cannot be used as stack (SFR
area, RAM area which stores data, or ROM area) as work area. Using areas like this is a cause of
user program crashes and destabilized emulator control. Therefore, ensure the +8 bytes maximum
capacity used by the user program as the user stack area.
Note on Address 0 Access:
• With the M16C/62 and 62A Group MCUs, when a maskable interrupt is generated, the interrupt
data (interrupt No. and interrupt request level) stored in address 0 is read out. Also, the interrupt
request bit is cleared when address 0 is read out. Consequently, when the address 0 readout
instruction is executed or when address 0 is read out in the cause of a program runaway, a
malfunction occurs in that the interrupt is not executed despite the interrupt request, because the
request bit of the highest priority interrupt factor enabled is cleared.
to
16
For this malfunction, when the reading out to the 0 address is generated excluding the interrupt, the
yellow LED lights up to alarm. When this LED lights, there is a possibility of wrong access,
therefore check the program. This LED is turned off by the RESET switch of the emulator main
unit.
Note on Stop and Wait Modes:
•Do not perform step execution at addresses in the stop or wait mode. It may cause communication
errors.
( 11 / 78 )
Page 12
IMPORTANT
Notes on MAP References and Settings:
• For details on referencing and setting MAP information, see User's Manual of the emulator
debugger M3T-PD30.
• Be sure to set the SFR area to EXTERNAL (an external section).
•When setting 0FFFC16 to 0FFFF16 to EXTERNAL :
This product uses the 4 byte area 0FFFC16 through 0FFFF16 as the stack area. If this 4 byte memory
cannot be read or written to, reset cannot be properly effected. As a result, you need to alter the map
settings if the condition given below is met.
(1) With the system which shifts from the single-chip mode to the memory expansion (or
microprocessor) mode, using the 4 byte area of 0FFFC16 to 0FFFF16 set to EXTERNAL.
(2) With the system which starts up in microprocessor mode, using the 4 byte area of 0FFFC16 to
0FFFF16 set to EXTERNAL and there is not enough memory to read or write.
The procedures to alter the MAP settings when the conditions (1) or (2) above are met.
(1) Set the 4 byte area of 0FFFC16 to 0FFFF16 to INTERNAL.
(2) Execute the RESET command by use of the emulator debugger M3T-PD30.
(3) Set the stack pointer.
(Example)
RESET:
FCLR I
LDC #480H, SP <-- Set the stack pointer
○○
(4) Set the 4 byte area 0FFFC16 through 0FFFF16 to EXTERNAL.
(Stop the program after executing this instruction)
Notes on Software Breaks and Hardware Breaks:
• Software breaks generate BRK interrupts by substituting the proper instruction to the BRK
instruction. Therefore, when referencing the result of a trace in bus mode, "0016" is displayed for
the instruction fetch address where a software break is set, and when referencing in reverse
assemble mode, "BRK" instruction is displayed.
• It is not possible to use a software break and a hardware break at the same time. If doing so, it may
not operate normally.
• In the area where the MAP setting is EXTERNAL, software breaks cannot be used.
Note on BRK Instruction:
• BRK instruction cannot be used.
( 12 / 78 )
Page 13
IMPORTANT
Note on NMI* Input:
• NMI* input from the target system is accepted only while a user program is being executed (only
while the RUN status LED on the PC4701's front panel is lit).
Note on HOLD* Input:
•Be sure to input "L" to the HOLD* pin of the target system during the user program executing.
Inputting "L" to the HOLD pin when stopping the user program or when run-time debugging may
cause a malfunction of the emulator.
Notes on Address Match Interrupt:
• Do not set software breaks at the same addresses as address-match interrupts as the program may
run out of control.
• Do not set a hardware break within 4 instructions before an address at which an address-match
interrupt occurs. If you do set a hardware break in this range, the program will run out of control.
•When an address at which an address-match interrupt occurs is executed in one-step mode, the
program stops after executing the first instruction after returning from the address-match interrupt
processing.
Note on Software Reset:
• Do not use a software reset.
Note on Protect Resistor (PRC2):
•Make note of the fact that the protect is not canceled when protect register (PRC2), which enables
writing in the port P9 direction register and the SI/O3, 4 control register, is changed with the below
procedure.
(1) Step execution of the "instruction for setting ("1") PRC2"
(2) Setting the break point from the "instruction for setting ("1") PRC2" to when the "setting the
register for the protect"
(3) Setting "("1") PRC2" from the dump window or script window
Note on Pullup Control Resistor:
• Ports P00 to P57 are not pulled up by the pullup control resistor.
When pulling up the ports P00 to P57, apply a resistance to the inside of the emulator. How to apply
it, refer to "3.2 Setting Switches and Pullup Resistor" (page 25).
Note: Ports P60 to P100 are pulled up by the pullup control resistor.
Note: Pullup control resistor can read and write from P00 to P100 properly.
( 13 / 78 )
Page 14
IMPORTANT
Note on Differences between Actual MCU and Emulator:
•Operations of the emulator differs from those of mask MCUs as listed below.
(1) Reset condition
Set the time for starting up (0.2 Vcc to 0.8 Vcc) 1 µs or less.
(2) Data values of ROM area at power-on
(3) Internal memories (RAM and ROM) capacities etc.
(4) Characteristics of ports P00 to P5
Ports P00 to P57 are connected via emulation circuits. The device used for the port emulation
circuit is;
Device: M60081L-0142FP
(5) HOLD* control
When inputting "Low" to the HOLD* pin to run into the HOLD state, P00 to P52 will be in the
HOLD state delaying by 2.5 cycles than the actual MCU (see Table 5.5, Figure 5.5, Table 5.9
and Figure 5.10).
(6) A-D input group selection function
To use the A-D input group selection function, following settings are required.
1) To select A-D input for port P0
•Set the whole 8-bit direction registers of P107 to P100 to input.
• Set P107 to P100 to no pullup for pullup control resister setting.
• P107 to P100 cannot be used for the input pins of I/O port and key input interrupt functions.
2) To select A-D input for port P2
• Set the whole 8-bit direction registers of P107 to P100 to input.
• Set P107 to P100 to no pullup for pullup control resister setting.
• P107 to P100 cannot be used for the input pins of I/O port and key input interrupt functions.
3) To select A-D input for port P10
• There is no limitation.
7
As a flexible cable, a pitch converter board and other devices are used between the evaluation
MCU and the target system, some characteristics are slightly different from those of the actual
MCU. Therefore, be sure to evaluate your system with an evaluation MCU. Before starting
mask production, evaluate your system and make final confirmation with an ES (Engineering
Sample) version MCU.
( 14 / 78 )
Page 15
IMPORTANT
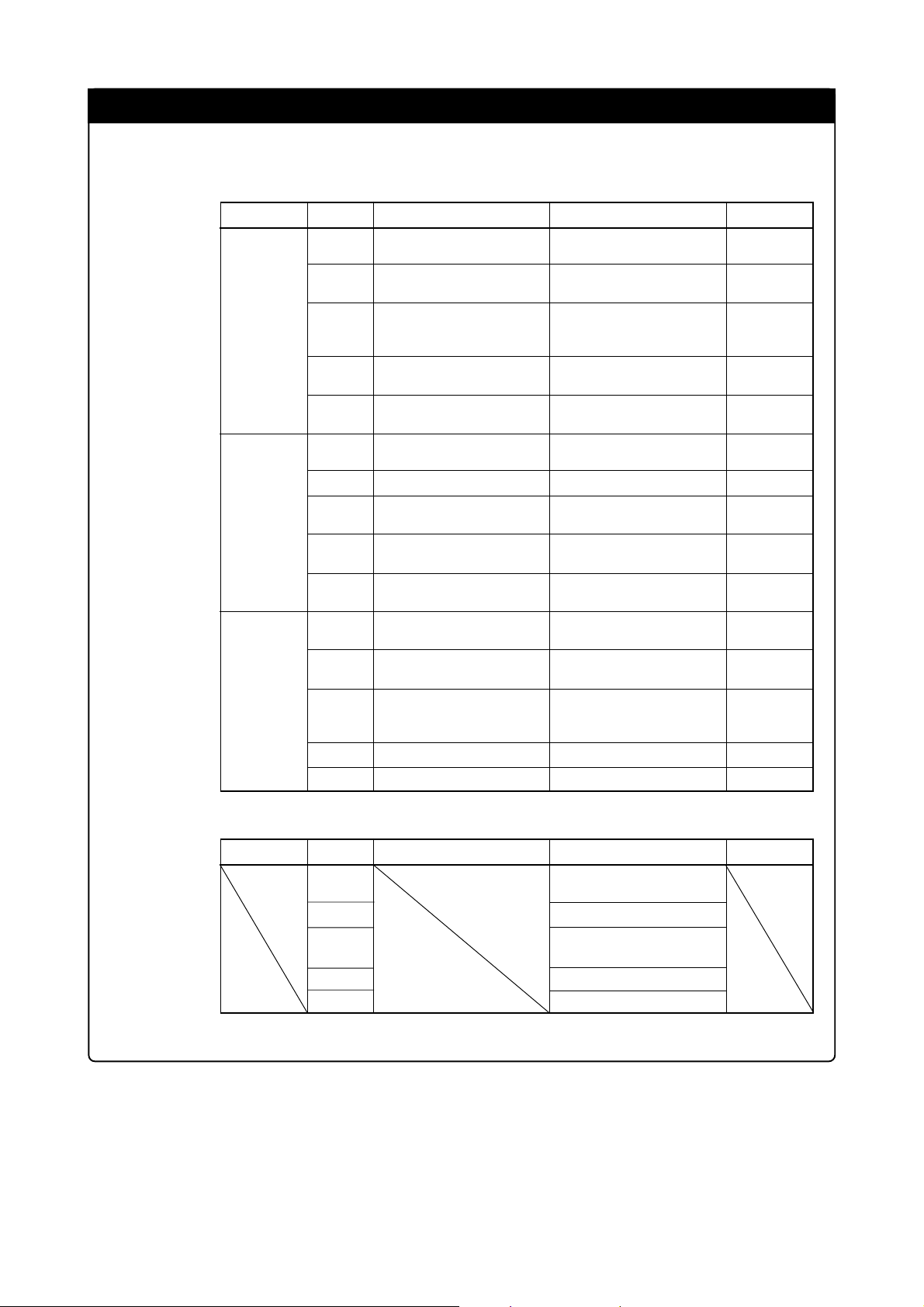
(7) Output of the actual MCU and this product
Table 1.1 Differences of outputs between actual MCU and this product (when executing program)
Access area Signal Actual MCU
SFR area
(MAP = EXT)
Internal RAM
Internal ROM
External area
Address
BHE*
Data
RD*
WR*
CS*
ALE
Address
BHE*
Data
RD*
WR*
CS*
ALE
Address
BHE*
Data
RD*
WR*
CS*
ALE
(floating during read operating)
(inputs external data at read cycle)
Outputs
Outputs
Outputs
(Low at write cycle,
Low at read cycle)
Does not output
(fixed to High output)
Does not output
(fixed to Low output)
Retains previous status
Floating
Does not output
(fixed to High output)
Does not output
(fixed to High output)
Does not output
(fixed to Low output)
Outputs
Outputs
Outputs
(Low at write cycle,
Low at read cycle)
Outputs
Outputs
(floating during read operating)
This product
Outputs
Outputs
Outputs
(Low at write cycle,
Low at read cycle)
Does not output
(fixed to High output)
Outputs
Outputs
Floating
Does not output
(fixed to High output)
Does not output
(fixed to High output)
Outputs
Outputs
Outputs
(inputs external data at read cycle)
Outputs
(Low at write cycle,
Low at read cycle)
Outputs
Outputs
∗ for difference
∗
∗
∗
Table 1.2 Differences of outputs between actual MCU and this product (when stopping program)
Access area Signal
Address
BHE*
Data Floating
RD*
WR*
CS*
ALE
Actual MCU
( 15 / 78 )
This product
Outputs
Outputs RD* only
(WR* is fixed to High output)
Outputs
Outputs
∗ for difference
Page 16
IMPORTANT
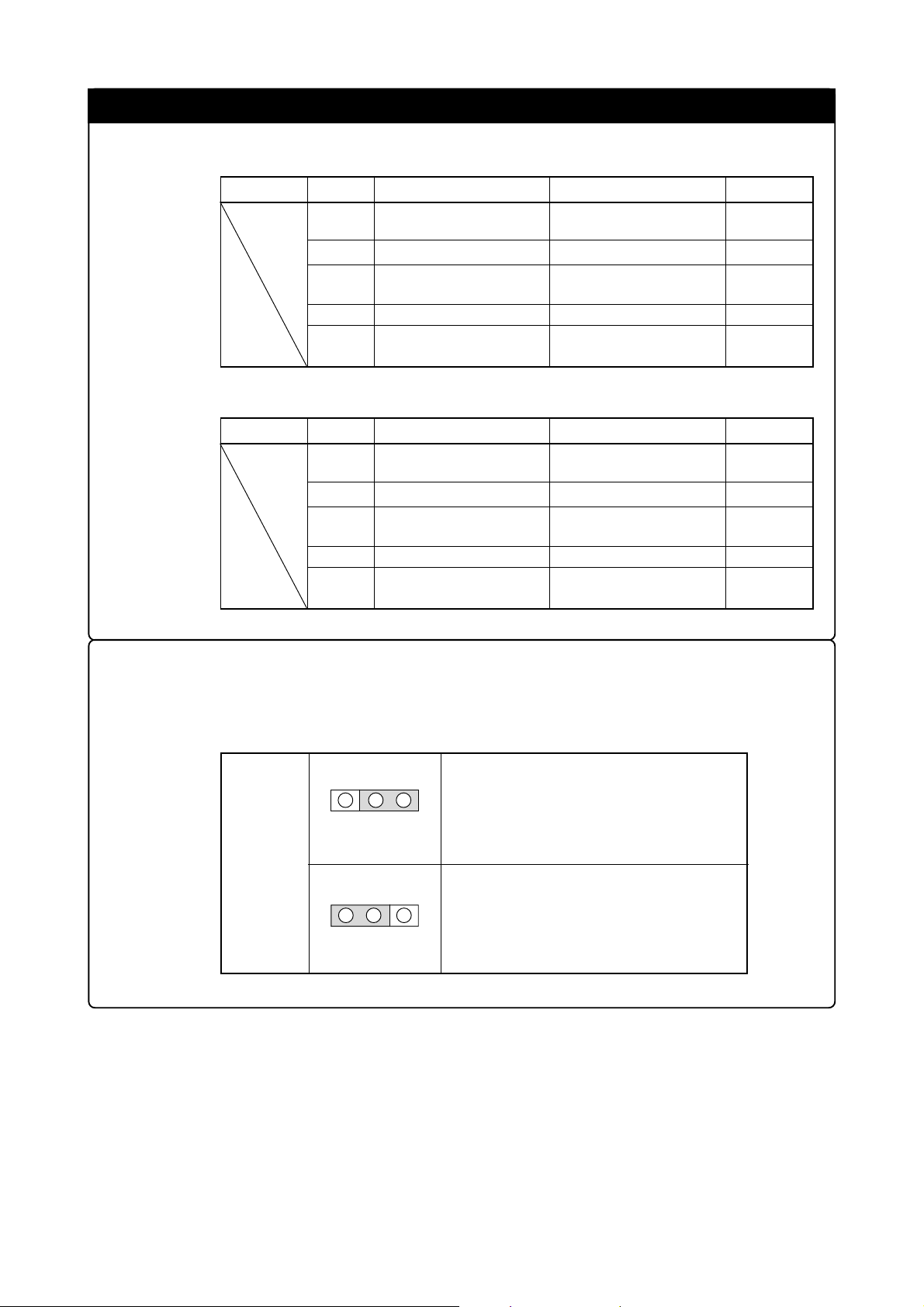
Table 1.3 Differences of outputs between actual MCU and this product (in stop mode)
Access area Signal Actual MCU
Address
BHE*
Data Floating
RD*
WR*
CS*
ALE
Retains previous status
Retains previous status
Does not output
(fixed to High output)
Retains previous status
Does not output
(fixed to High output)
Table 1.4 Differences of outputs between actual MCU and this product (in wait mode)
Access area Signal Actual MCU
Address
BHE*
Data Floating
RD*
WR*
CS*
ALE
Retains previous status
Retains previous status
Does not output
(fixed to High output)
Retains previous status
Does not output
(fixed to High output)
This product
Retains previous status
Does not output
(fixed to High output)
Retains previous status
Does not output
(fixed to High output)
This product
Retains previous status
Does not output
(fixed to High output)
Retains previous status
Does not output
(fixed to High output)
∗ for difference
∗ for difference
∗
∗
Note on Switch Settings According to Operation Voltage:
• With this product, you need to change the switch setting according to the operation voltage. Change
the setting as described below. For details, see "3.2 Setting Switches and Pullup Resistor" (page 25).
L
JP2
(Factory-setting)
JP2
L
JP2
Set when using at the range of the target voltage
H
within +3.6 to +5.5 V or not connecting the target
system.
Set when using at the range of the target voltage
H
within +2.7 to +3.6 V.
( 16 / 78 )
Page 17

Chapter 2. Preparation
This chapter describes the package components, the system configuration and the preparation for using this product for the
first time.
2.1 Terminology ............................................................................................................................... 18
2.2 Package Components..................................................................................................................19
2.3 Other Tool Products Required for Development........................................................................19
2.4 Name of Each Part...................................................................................................................... 20
(1) System Configuration ........................................................................................................... 20
(2) Inside of Emulation Pod ....................................................................................................... 21
2.5 When Using the Emulator for the First Time.............................................................................22
( 17 / 78 )
Page 18

Chapter 2. Preparation
2.1 Terminology
Some specific words used in this user's manual are defined as follows:
Emulator system
This means an emulator system built around the PC4701 emulator. The PC4701 emulator system is
configured with an emulator main unit, emulation pod, host machine and emulator debugger.
Emulator main unit (Hereafter PC4701)
This means a generic name for PC4701M, PC4701HS and PC4701L emulators for 8 and 16-bit
MCUs.
Emulation pod
This means M30620T2-RPD-E (this product). This emulation pod is for M16C/62 and 62A Group
MCUs.
Host machine
This means a personal computer used to control the emulator and emulation pod.
Emulator debugger
This means a software tool M3T-PD30 to control the emulator from the host machine through an
interface.
Firmware
Program that analyzes contents of communication with the emulator debugger and controls the
emulator hardware. This program is installed in the EEPROM. This program is downloadable from
the emulator debugger to upgrade the firmware or to support other MCUs.
Evaluation MCU
This means the microcomputer mounted on the emulation pod which is operated in the specific mode
for tools.
Target MCU
This means the microcomputer you are going to debug.
Target system
This means a user's application system using the microcomputer to be debugged.
*
In this user's manual, this symbol is used to show active LOW. (e.g. RESET*: Reset signal)
( 18 / 78 )
Page 19
2.2 Package Components
The M30620T2-RPD-E package consists of the following items. When unpacking, check to see if
your M30620T2-RPD-E contains all of these items.
Item
M30620T2-RPD-E emulation pod main unit
FLX120-RPD flexible cable for connecting PC4701
FLX100 flexible cable for connecting pitch converter board (pre-installed in emulation pod)
FLX-100LCC pitch converter board for connecting target system
OSC-3 (16 MHz) oscillator circuit board (pre-installed in emulation pod)
OSC-2 oscillator circuit board
Resistor arrays for pulling up ports P00 to P57 (51 kΩ)
Hardware tool user registration FAX sheet (English)
Hardware tool user registration FAX sheet (Japanese)
M30620T2-RPD-E user's manual (this manual)
M30620T2-RPD-E user's manual (Japanese)
Quantity
1
1
1
1
1
1
12
1
1
1
1
Please keep the M30620T2-RPD-E’s packing box and cushion material in your place for reuse at a
later time when sending your product for repair or other purposes. Always use these packing box and
cushion material when transporting this product.
If any of these items are missing or found faulty, please contact your local distributor. Also, if there
is any question or doubt about the packaged product, contact your local distributor.
2.3 Other Tool Products Required for Development
To bring forward programs development on the M16C/62 and 62A Group MCUs, the products listed
below are necessary in addition to those contained package above. Get them separately.
Emulator main unit
Emulator debugger
Converter board
(Required for 80-pin MCUs)
To purchase these products, contact your nearest distributer.
PC4701M, PC4701HS or PC4701L
M3T-PD30
FLX-DIRECT613 + DIRECT80S
or
100LCC-80QSB
see Figure 3.11 Connecting emulation pod and target systems
(page 35)
( 19 / 78 )
Page 20
2.4 Name of Each Part
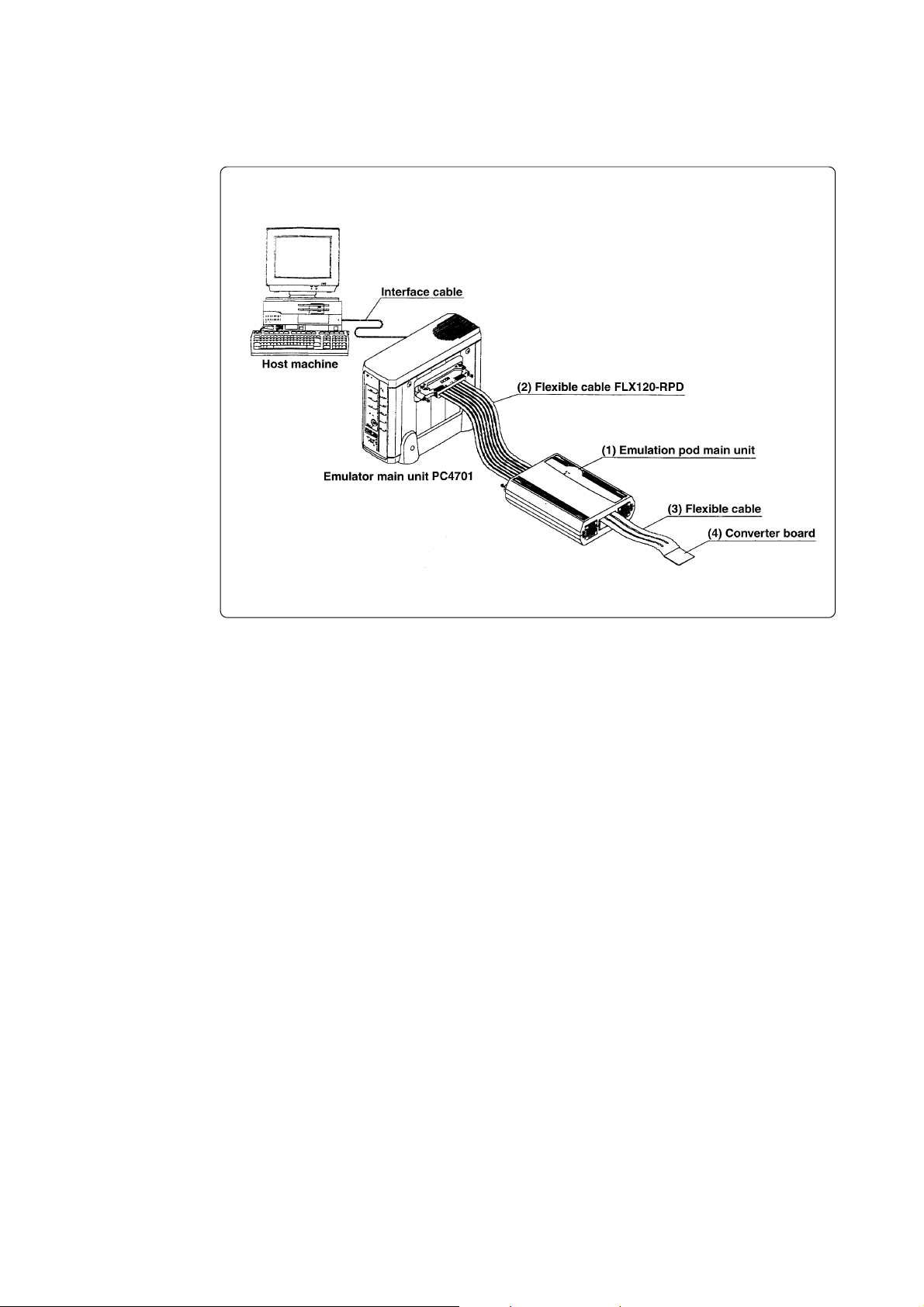
(1) System Configuration
Figure 2.1 System configuration
(1) to (4) in Figure 2.1 are included with this product package.
(1) Emulation pod (M30620T2-RPD-E)
This emulation pod contains an evaluation MCU, emulation memory and circuit to feature the
debugging function.
(2) Flexible cable (FLX120-RPD)
This is a 120-pin flexible cable for connecting the PC4701 emulator and the emulation pod.
(3) Flexible cable (FLX100)
This is a 100-pin flexible cable for connecting the emulation pod and the target system.
(4) Pitch converter board
This is a pitch converter board for connecting to the target system. For details, refer to "3.5
Connecting the Target System" (page 35).
( 20 / 78 )
Page 21
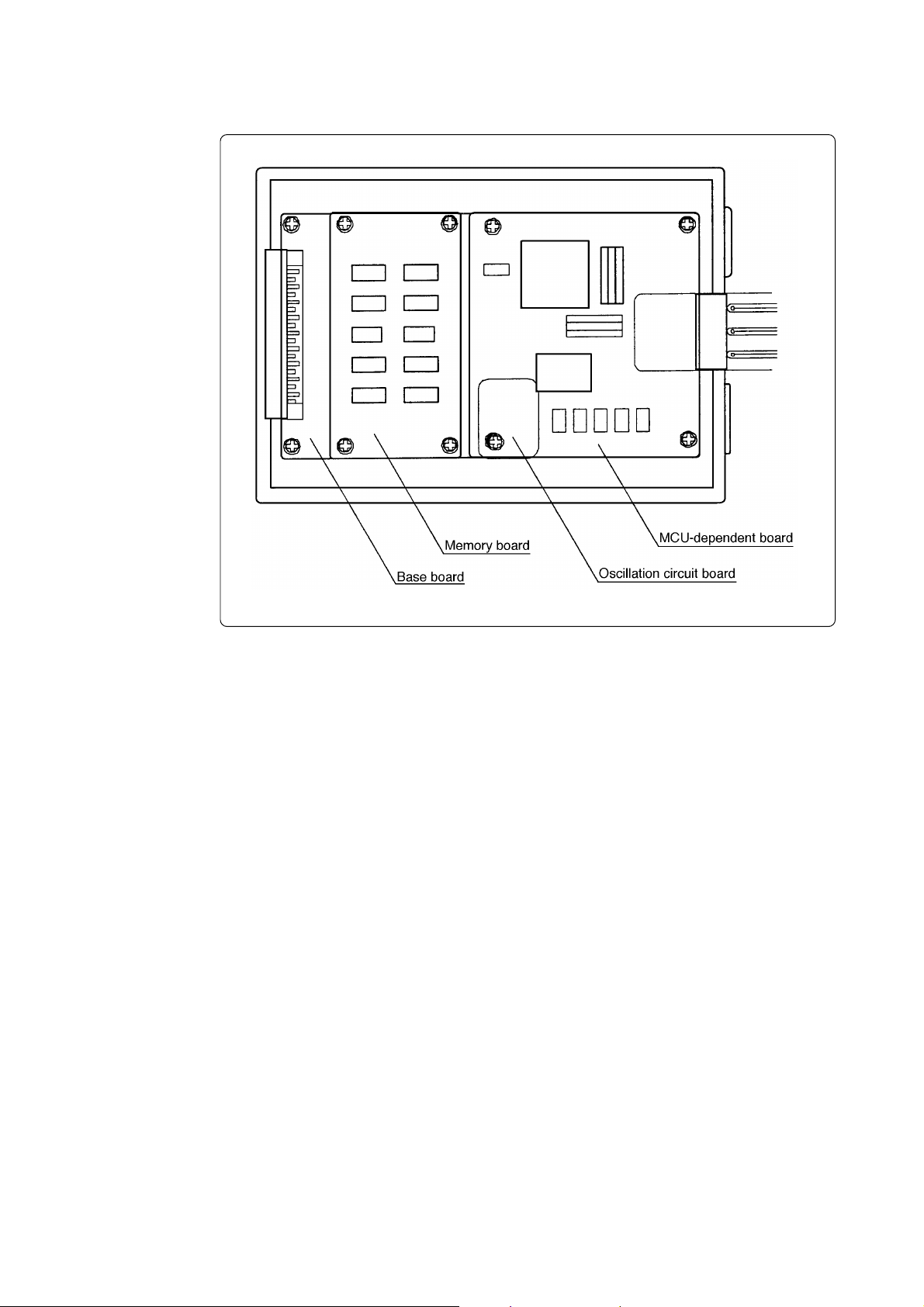
(2) Inside of Emulation Pod
Figure 2.2 Internal view of emulation pod
(1) MCU-dependent board
Board which groups parts (pins and added functions) which vary according to MCU model.
(2) Base board
Board for the M16C/60 and M16C/20 Series MCUs which controls the interface with the PC4701
and the evaluation MCU.
(3) Memory board
Board on which is mounted the emulation memory (1 MB) and the map memory (4 bit × 1 M)
for the M16C/60 and M16C/20 Series MCUs.
(4) Oscillation circuit board
Oscillator circuit board on which the oscillation module device is mounted (16.000 MHz).
It is planned to enable customers to use future M16C/62 and 62A Group models by changing the
MCU-dependent board and MCU board.
( 21 / 78 )
Page 22
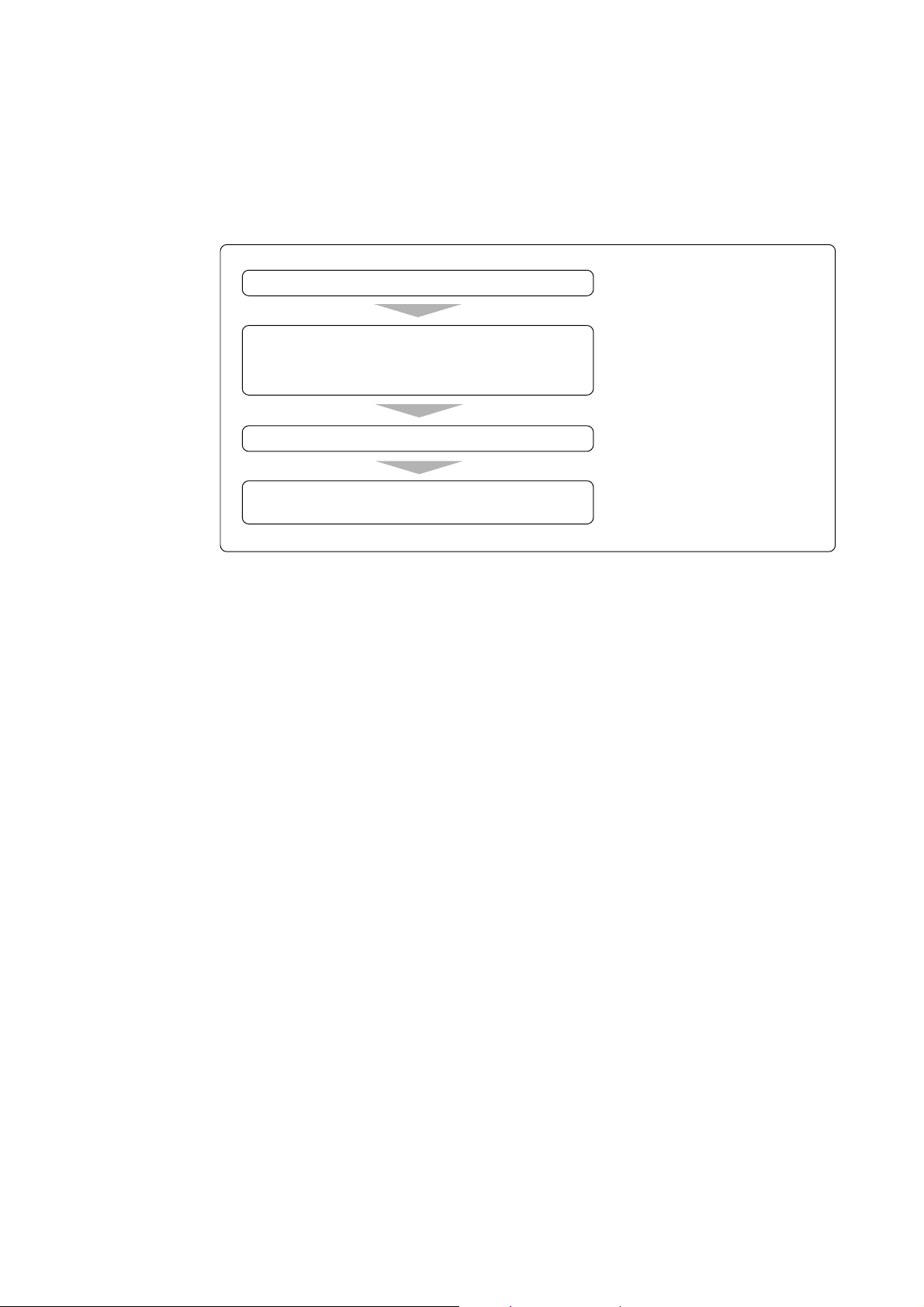
2.5 When Using the Emulator for the First Time
If you have purchased this emulation pod newly, it is necessary to download the firmware. The
download procedure is given in Figure 2.3.
Before attempting to download the firmware, check the emulator debugger is installed and the
emulator is connected to the host machine. For more information, see each user's manual of the
emulator debugger and the PC4701.
Connect the PC4701 and this product.
Within 2 seconds of turning the power ON, press the
RESET switch of the PC4701 and check the maintenance
mode is accessed.
Download the firmware using the emulator debugger.
End the emulator debugger and shut the power of the
PC4701 OFF.
See "3.4 Connecting the PC4701
and Emulation Pod" (page 33).
See "4.2 Downloading Firmware"
(page 40).
Figure 2.3 Firmware download procedure when emulator is used for the first time
To make sure the emulation pod works properly, run the self-check. For self-check procedures, see
"4.3 Self-check" (page 41).
( 22 / 78 )
Page 23
Chapter 3. Setting Up
This chapter describes switch settings required for using this product and how to connect this product to the PC4701 and
the target system.
3.1 Removing the Upper Cover........................................................................................................ 24
3.2 Setting Switches and Pullup Resistor .........................................................................................25
3.3 Selecting Clock Supply .............................................................................................................. 29
(1) Using the Oscillator Circuit on Target System.....................................................................30
(2) Changing the Internal Oscillator Circuit of Emulation Pod ................................................. 31
(3) Replacing the Oscillator Circuit Boards ...............................................................................32
3.4 Connecting the PC4701 and Emulation Pod .............................................................................. 33
(1) Connecting the Cable to the PC4701....................................................................................33
(2) Connecting the Cable to the Emulation Pod.........................................................................34
3.5 Connecting the Target System....................................................................................................35
( 23 / 78 )
Page 24
Chapter 3. Setting Up
To use this emulation pod with your target system, it is necessary to set as follows. Set the following
after removing the upper cover.
• Change the oscillation frequency.
• Set the XIN, XOUT, XCIN and XCOUT pins for the target system.
• Set the switches for the operating voltage of the target system.
• Install a pullup resistor to ports P00 to P57.
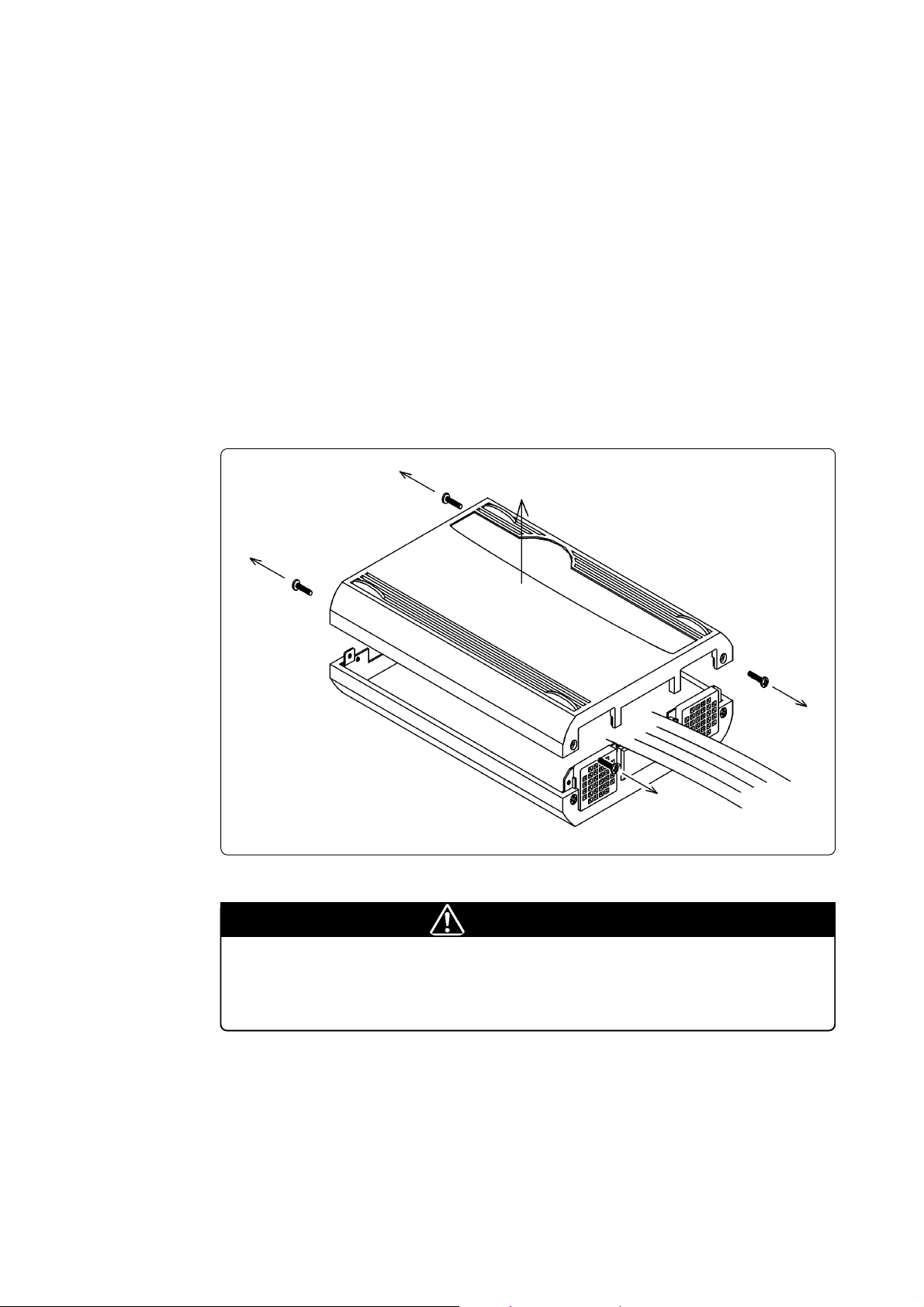
3.1 Removing the Upper Cover
The procedure of removing the upper cover is shown below.
(1) Remove the four screws of both sides of this product and lift off the upper cover. (see Figure 3.1)
(2) Set the jumper switches.
(3) Replace the upper cover and secure the four screws.
Figure 3.1 Removing the upper cover
CAUTION
When Removing the Upper Cover:
• Always shut OFF power when removing the upper cover or setting the switches.
( 24 / 78 )
Page 25

3.2 Setting Switches and Pullup Resistor
Figure 3.2 shows the positions of switches and a position for installing a pullup resistor. Tables 3.1,
3.2 list how to set each switch and Figure 3.3 shows how to install a pullup resistor.
Figure 3.2 Positions of switches and their factory-settings
( 25 / 78 )
Page 26

Table 3.1 Switch settings of M30620T2-RPD-E (part 1)
Signal Switch Setting Description
H
SS SW1
CNV
OPEN
L
SW1
CNVSS
(Factory-setting)
H
OPEN
L
SW1
CNVSS
H
OPEN
L
SW1
CNVSS
8
OPEN
16
SW2
BYTE
(Factory-setting)
Pulls down the CNV
SS pin of MCU with a resistance
at 33 kΩ.
Does not pull down/up the CNV
Pulls up the CNVSS pin of MCU with a resistance
at 33 kΩ.
Pulls down the BYTE pin of MCU with a resistance
at 33 kΩ.
SS pin of MCU.
SW2BYTE
X
OUT SW3
8
OPEN
16
SW2
BYTE
8
OPEN
16
SW2
BYTE
XOUT
OPEN
SW3
XOUT
(Factory-setting)
XOUT
OPEN
SW3
XOUT
Does not pull down/up the BYTE pin of MCU.
Pulls up the BYTE pin of MCU with a resistance at
33 kΩ.
Does not connect the X
OUT pin of MCU to the target
system.
Connects the X
OUT pin of MCU to the target system.
( 26 / 78 )
Page 27

Table 3.2 Switch settings of M30620T2-RPD-E (part 2)
Signal Switch Setting Description
XCOUT
6/XCOUT SW4
P8
OPEN
P86
SW4
P86/XCOUT
(Factory-setting)
XCOUT
OPEN
P86
SW4
P86/XCOUT
XCOUT
OPEN
P86
SW4
P86/XCOUT
XCIN
Connects the P86/XCOUT pin of MCU to the target
system. (Uses P86/XCOUT pin as port P86)
Does not connect the P8
P86/XCOUT pin as XCOUT and opens XCOUT.)
Connects the P86/XCOUT pin of MCU to the target
system. (Uses P86/XCOUT pin as XCOUT and connect
XCOUT to the target system.)
6/XCOUT pin of MCU. (Uses
SW5P87/XCIN
JP2
P87
SW5
P87/XCIN
(Factory-setting)
XCIN
P87
SW5
P87/XCIN
L
JP2
(Factory-setting)
L
JP2
Connects the P87/XCIN pin of MCU to the target
system. (Uses P87/XCIN pin as port P87)
Uses P87/XCIN pin as XCIN.
Set when using at the range of the target voltage
H
within +3.6 to +5.5 V or not connecting the target
system.
Set when using at the range of the target voltage
H
within +2.7 to +3.6 V.
( 27 / 78 )
Page 28

It is not possible to control the pullup by the pullup control resistor of ports P00 to P57 (possible to
read and write by the pullup control resistor).
However, as this product has a socket for installing the pullup resistor, it is possible to pull up by
mounting the resistor array included with this product. Figure 3.3 shows the positions for installing
the pullup resistor.
Figure 3.3 Positions for installing the pullup resistor
( 28 / 78 )
Page 29

3.3 Selecting Clock Supply
There are two ways to supply a clock to the MCU, using the oscillator circuit of the emulation pod
or using the oscillator circuit on the target system. Table 3.3 lists the factory-settings of each clock
supply.
Table 3.3 Clock supply to the MCU
Clock Description Display of emulator debugger Default setting
Internal oscillator circuit of emulation pod
(OSC-3: 16 MHz)
X
IN-XOUT
Target System
Internal oscillator circuit of emulation pod
XCIN-XCOUT
(32.768 kHz)
Target System
IMPORTANT
Notes on Changing the Clock Supply:
• The clock supply can be set by the Init dialog when starting up the emulator debugger
or inputting CLK command on the script window.
• For XCIN-XCOUT pins, it is necessary to set switches in the emulation pod. For details,
refer to "3.2 Setting Switches and Pullup Resistor" (page 25).
Internal
External
Internal
External
O
-
O
-
( 29 / 78 )
Page 30

(1) Using the Oscillator Circuit on Target System
When turning on the power supply, the internal clock of emulation pod is selected to supply the clock
to the MCU. To use the external clock on the target system, change the clock by the Init dialog when
starting up the emulator debugger or the CLK command on the script window. (For details, refer to
the user's manual of the emulator debugger)
Figure 3.4 External oscillator circuit
Figure 3.5 Circuit in which oscillation does not occur (same for XCIN-XCOUT)
IMPORTANT
Notes on External Clock:
• To operate the emulation pod with an external clock, construct the oscillator circuit
as shown in Figure 3.4 in the target system and input the oscillator output at 50% duty
(within the operating range of the evaluation MCU) into the XIN pin. And the XOUT
pin should be open.
• Make note of the fact that in the oscillator circuit shown in Figure 3.5 where a
resonator is connected between the XIN and XOUT pins, oscillation does not occur
because a flexible cable, buffer IC and other devices are used between the evaluation
MCU and the target system. It is same for sub-clock oscillator circuits (XCIN and
XCOUT).
( 30 / 78 )
Page 31

(2) Changing the Internal Oscillator Circuit of Emulation Pod
An oscillator circuit board for 16 MHz is mounted on this product. To use the emulation pod at a
frequency other than 16 MHz, build the desired oscillator circuit on the included OSC-2 oscillator
circuit board (bare board) and replace the board installed in the emulation pod when shipped from
the factory.
Figure 3.6 shows a view of the OSC-2 oscillator circuit board (bare board) and where connector pins
are located. Figure 3.7 shows the circuitry of the OSC-2 oscillator circuit board (bare board). Use the
number of oscillator circuits recommended by the oscillator manufacturer.
J1-4: GND
J1-3: Oscillator output
J1-2: GND
J1-1: Vcc
Figure 3.6 External view of oscillator board (OSC-2) and connector pin assignment
IC1
1011 8
9
IC1
CLK
R1
Vcc
14
IC1
7
GND
GND
IC
2
4
C3
6
12
1
**
X1,X 2
R2
3
5
1
C2
X3
* X1: 5.08-mm-pitch 2-pin oscillator IC1: Inverter (Unbuffer)
* X2: 2.54-mm-pitch 2-pin oscillator
* X3: 2.54-mm-pitch 3-pin oscillator
C1
*
13
J1-3
J1-1
J1-2
J1-4
Figure 3.7 Circuit of oscillator board (OSC-2)
( 31 / 78 )
Page 32

(3) Replacing the Oscillator Circuit Boards
Figure 3.8 shows how to replace the oscillator circuit boards. For the position of the oscillator circuit
board, see Figure 2.2.
(1) Unscrew the screw connecting the oscillator circuit board.
(2) Lift off the oscillator circuit board.
(3) Attach the J1 connector of another oscillator circuit board
for replacement to the J5 connector of the MCU-dependent
board M30620T2-PRT.
(4) Secure the oscillator circuit board with the screw.
Figure 3.8 Replacing the oscillator circuit boards
( 32 / 78 )
Page 33

3.4 Connecting the PC4701 and Emulation Pod
To connect the emulation pod to the PC4701, use the FLX120-RPD 120-pin flexible cable included
with this product package. Connect the PC4701 side connector of FLX120-RPD to the cable
connector of the PC4701, then secure with screws the FLX120-RPD.
(1) Connecting the Cable to the PC4701
Figure 3.9 shows how to connect the PC4701 and FLX120-RPD
Figure 3.9 Connecting PC4701 and FLX120-RPD
CAUTION
Note on Connecting the Cable:
• To connect the FLX120-RPD, be sure to hold the both sides of the PC4701 side
connector horizontally with the "UPSIDE" facing up.
• Always shut OFF power before connecting the cable. The power ON state could
destroy internal circuits.
Note on Securing the Screws:
• After connecting the cable to the emulator main unit PC4701, be sure to secure the
screws mounted in both sides of the connector.
( 33 / 78 )
Page 34

(2) Connecting the Cable to the Emulation Pod
Figure 3.10 shows how to connect the FLX120-RPD and the emulation pod.
Figure 3.10 Connecting FLX120-RPD and emulation pod
CAUTION
Note on Connecting the Cable:
• Always shut OFF power before connecting the cable. The power ON state could
destroy internal circuits.
Note on Securing the Screws:
•After connecting the cable to the emulation pod, be sure to secure the screws.
( 34 / 78 )
Page 35

3.5 Connecting the Target System
There are eight ways available to connect the emulation pod to target systems as shown in Figure 3.11.
Figure 3.11 Connecting emulation pod and target systems
CAUTION
Notes on Connecting Target Systems:
• Take care not to attach the converter board in a wrong direction. It may cause a fatal
damage to the emulation pod.
• The small connectors of FLX100 and FLX-100LCC are guaranteed for only 20
insertion/removal iterations.
( 35 / 78 )
Page 36

MEMO
( 36 / 78 )
Page 37

Chapter 4. Usage
This chapter describes from turning on the power of this product to starting up the emulator debugger.
4.1 Turning On the Power ................................................................................................................ 38
(1) Checking the Connection of the Emulator System...............................................................38
(2) Turning On the Power...........................................................................................................38
(3) LED Display When PC4701 Starts Up Normally ................................................................ 39
4.2 Downloading Firmware.............................................................................................................. 40
(1) When It is Necessary to Download Firmware ...................................................................... 40
(2) Downloading Firmware in Maintenance Mode .................................................................... 40
4.3 Self-check ................................................................................................................................... 41
(1) Self-check Procedure ............................................................................................................41
(2) If an Error is Detected in the Self-check...............................................................................41
( 37 / 78 )
Page 38

Chapter 4. Usage
4.1 Turning On the Power
(1) Checking the Connection of the Emulator System
Before turning the power ON, check the connection of the PC4701, emulation pod, converter board
and target system.
(2) Turning On the Power
Power ON/OFF the target system and the PC4701 as simultaneously as possible.
Notes on Power Supply:
CAUTION
•The emulator's VCC pin is connected to the target system in order to monitor target
system voltage. For this reason, the emulator cannot supply power to the target
system. Therefore, provide the target system with a separate power supply from that
of the emulator.
• Keep target system power supply voltage within the MCU's specified range.
• Do not change target system power supply voltage after power has been activated.
( 38 / 78 )
Page 39

(3) LED Display When PC4701 Starts Up Normally
After the emulator starts up, check the status of the LEDs on the front panel to see whether emulation
pod operation is enabled or not. Figure 4.1 shows front panel LED lighting status when the emulator
is turned ON.
Figure 4.1 LED display when the power turned on
( 39 / 78 )
Page 40

4.2 Downloading Firmware
(1) When It is Necessary to Download Firmware
It is necessary to download firmware when;
(1) When you use this product for the first time
(2) When the firmware has been upgraded
(3) When the emulator debugger has been upgraded
(4) When you use this product with a PC4701 which was used with other emulation pod before
(2) Downloading Firmware in Maintenance Mode
Download the firmware in the maintenance mode as explained here following. The target system
must not be connected when downloading the firmware.
(1) Within 2 seconds of activating power to the emulator, press the RESET switch on the emulator
front panel. This will switch the emulator to the maintenance mode.
(2) Start up the emulator debugger. When the Init dialog box setup is complete, the dialog which
urges to download the firmware will appear. Download the firmware following messages.
Required time for downloading the firmware depends on the connection of the interface.
• For the serial interface ................ About 7 minutes
• For the parallel interface ............. About 30 seconds
Figure 4.2 Downloading firmware in the maintenance mode
CAUTION
Note on Downloading Firmware:
• Do not shut OFF power while the firmware is being downloaded. Doing so, the
emulator will not start up properly. If power is shut OFF by mistake, redownload the
firmware in the maintenance mode.
( 40 / 78 )
Page 41

4.3 Self-check
(1) Self-check Procedure
To run the emulator self-check, do so as explained here below. While the self-check is in progress,
LEDs will change as shown in Figure 4.4.
(1) Set the switches in the emulation pod same as the factory setting (see Figure 4.3).
(2) When the target system is connected, disconnect the target system.
(3) Within 2 seconds of activating power to the emulator, press the RESET switch on the emulator
front panel to switch the emulator to the maintenance mode.
(4) Check the "SAFE" LED starts blinking and then press the RESET switch again.
(5) The self-check will start. If the normal result is displayed in about 2 minutes, the self-check
has terminated normally.
L
JP2
Figure 4.3 Switch settings when running the self-check (factory-settings)
H
(2) If an Error is Detected in the Self-check
If the elf-check does not result normally (ERROR 1 and ERROR 2 in Figure 4.4), check the following.
•Check the connection of the emulation pod and the PC4701.
• Download the proper firmware.
•Check if the switches in this product are set same as the factory-settings (Figure 4.3).
CAUTION
Note on Self-check:
• If the self-check does not result normally (excluding target system errors), the
emulation pod may be damaged. Then contact your local distributor.
( 41 / 78 )
Page 42

Figure 4.4 Self-check procedure
( 42 / 78 )
Page 43

Chapter 5. Specifications
This chapter describes specifications of this product.
5.1 Specifications ..............................................................................................................................44
5.2 Operation Timing in Memory Expansion and Microprocessor Modes (5 V) .............................45
(1) Separate Bus, No-wait ..........................................................................................................45
(2) Separate Bus, With Wait, Accessing External Memory Area ..............................................47
(3) Multiplex Bus, With Wait, Accessing External Memory Area ............................................49
(4) Timing Requirements ........................................................................................................... 51
5.3 Operation Timing in Memory Expansion and Microprocessor Modes (3 V) .............................53
(1) Separate Bus, No-wait ..........................................................................................................53
(2) Separate Bus, With Wait, Accessing External Memory Area ..............................................55
(3) Multiplex Bus, With Wait, Accessing External Memory Area ............................................57
(4) Timing Requirements ........................................................................................................... 59
5.4 Electrical Characteristics .............................................................................................................61
5.5 Connection Diagram.................................................................................................................... 62
5.6 External Dimensions ...................................................................................................................64
(1) External Dimensions of Emulation Pod................................................................................64
(2) External Dimensions of Pitch Converter Board (FLX-100LCC) .........................................65
( 43 / 78 )
Page 44

Chapter 5. Specifications
5.1 Specifications
Table 5.1 lists the specifications of M30620T2-RPD-E.
Table 5.1 Specifications of M30620T2-RPD-E
Emulators
Applicable MCUs
Evaluation MCU
Usable modes
Emulation memory
Maximum operating frequency
Clock supply
PC4701M, PC4701HS or PC4701L
M16C/62 and M16C/62A Group MCUs (5 V)
M30622SAFP
Single-chip mode
Memory expansion mode
Microprocessor mode
1 MB
JP2 = L See the charts under this table (2.7 to 3.6 V).
JP2 = H See the charts under this table (3.6 to 5.5 V).
XIN-X
X
CIN-XCOUT
OUT
Internal oscillator circuit board (OSC-3)
Switchable to external oscillator input.
Internal oscillator circuit board
Switchable to external oscillator input.
Operating voltage
Operating temperature
Storage temperature
Power supply to emulation pod
Connection to target system
Overseas standards
JP2 = L
JP2 = H
5 to 35°C (no dew)
-10 to 60°C (no dew)
Supplied from PC4701
Refer to "3.5 Connecting the Target System" (page 35).
• U.S. EMI standards (FCC part 15 Class A)
• CE marking (EN55022, EN50082-1)
2.7 to 3.6 V
3.6 to 5.5 V
( 44 / 78 )
Page 45

5.2 Operation Timing in Memory Expansion and Microprocessor Modes (5 V)
(1) Separate Bus, No-Wait
Table 5.2 and Figure 5.1 show the bus timing in the memory expansion mode and the microprocessor
mode (separate bus, no-wait).
Table 5.2 Memory expansion mode and microprocessor mode (separate bus, no-wait)
Actual MCU
Min.
4
0
0
4
-4
0
0
4
(*1)
0
[ns]
Max.
25
25
25
25
25
40
Symbol Item
Td (BCLK-AD)
Th (BCLK-AD)
Th (RD-AD)
Th (WR-AD)
Td (BCLK-CS)
Th (BCLK-CS)
Td (BCLK-ALE)
Th (BCLK-ALE)
Td (BCLK-RD)
Th (BCLK-RD)
Td (BCLK-WR)
Th (BCLK-WR)
Td (BCLK-DB)
Th (BCLK-DB)
Td (DB-WR)
Th (WR-DB)
Address output delay time
Address output hold time (BCLK standard)
Address output hold time (RD standard)
Address output hold time (WR standard)
Chip-select output delay time
Chip-select output hold time (BCLK standard)
ALE signal output delay time
ALE signal output hold time
RD signal output delay time
RD signal output hold time
WR signal output delay time
WR signal output hold time
Data output delay time (BCLK standard)
Data output hold time (BCLK standard)
Data output delay time (WR standard)
Data output hold time (WR standard)
This product
[ns]
Min. Max.
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
*1 Calculated by the following formula according to the frequency of BCLK.
9
Td (DB-WR)=
10
f(BCLK) x 2
-40 [ns]
( 45 / 78 )
Page 46

Memory expansion mode and microprocessor mode (no-wait)
Read timing
BCLK
CSi
ADi
BHE
ALE
RD
DB
Write timing
VCC = 5 V
BCLK
CSi
ADi
BHE
ALE
WR, WRL,
WRH
DB
Conditions:
CC = 5 V
• V
• Input timing voltage: VIL = 0.8 V, VIH = 2.5 V
• Output timing voltage: VOL = 0.8 V, VOH = 2.0 V
Figure 5.1 Memory expansion mode and microprocessor mode (no-wait)
( 46 / 78 )
Page 47

(2) Separate Bus, With Wait, Accessing External Memory Area
Table 5.3 and Figure 5.2 show the bus timing in the memory expansion mode and the microprocessor
mode (with wait, accessing external memory area).
Table 5.3 Memory expansion mode and microprocessor mode (with wait, external memory area)
Symbol
Td (BCLK-AD)
Th (BCLK-AD)
Th (RD-AD)
Th (WR-AD)
Td (BCLK-CS)
Th (BCLK-CS)
Td (BCLK-ALE)
Th (BCLK-ALE)
Td (BCLK-RD)
Th (BCLK-RD)
Td (BCLK-WR)
Th (BCLK-WR)
Td (BCLK-DB)
Th (BCLK-DB)
Td (DB-WR)
Th (WR-DB)
Item
Address output delay time
Address output hold time (BCLK standard)
Address output hold time (RD standard)
Address output hold time (WR standard)
Chip-select output delay time
Chip-select output hold time (BCLK standard)
ALE signal output delay time
ALE signal output hold time
RD signal output delay time
RD signal output hold time
WR signal output delay time
WR signal output hold time
Data output delay time (BCLK standard)
Data output hold time (BCLK standard)
Data output delay time (WR standard)
Data output hold time (WR standard)
Actual MCU
[ns]
Min.
4
0
0
4
-4
0
0
4
(*1)
0
Max.
25
25
25
25
25
40
This product
[ns]
Min. Max.
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
*1 Calculated by the following formula according to the frequency of BCLK.
9
10
Td (DB-WR)=
f(BCLK)
-40 [ns]
( 47 / 78 )
Page 48

Memory expansion mode and microprocessor mode
(with wait, accessing external memory area)
Read timing
BCLK
CSi
ADi
BHE
ALE
RD
DB
Write timing
VCC = 5 V
BCLK
CSi
ADi
BHE
ALE
WR, WRL,
WRH
DBi
Conditions:
CC =5 V
• V
• Input timing voltage: VIL = 0.8 V, VIH = 2.5 V
• Output timing voltage: VOL = 0.8 V, VOH = 2.0 V
Figure 5.2 Memory expansion mode and microprocessor mode (with wait)
( 48 / 78 )
Page 49

(3) Multiplex Bus, With Wait, Accessing External Memory Area
Table 5.4 and Figure 5.3 show the bus timing in the memory expansion mode and the microprocessor
mode (with wait, accessing external memory area and using multiplex bus).
Table 5.4 Memory expansion mode and microprocessor mode (with wait, multiplex bus)
Symbol Item
Td (BCLK-AD)
Th (BCLK-AD)
Th (RD-AD)
Th (WR-AD)
Td (BCLK-CS)
Th (BCLK-CS)
Th (RD-CS)
Th (WR-CS)
Td (BCLK-RD)
Th (BCLK-RD)
Td (BCLK-WR)
Th (BCLK-WR)
Td (BCLK-DB)
Th (BCLK-DB)
Td (DB-WR)
Th (WR-DB)
Td (BCLK-ALE)
Th (BCLK-ALE)
Td (AD-ALE)
Th (ALE-AD)
Td (AD-RD)
Td (AD-WR)
Tdz (RD-AD)
Address output delay time
Address output hold time (BCLK standard)
Address output hold time (RD standard)
Address output hold time (WR standard)
Chip-select output delay time
Chip-select output hold time (BCLK standard)
Chip-select output hold time (RD standard)
Chip-select output hold time (WR standard)
RD signal output delay time
RD signal output hold time
WR signal output delay time
WR signal output hold time
Data output delay time (BCLK standard)
Data output hold time (BCLK standard)
Data output delay time (WR standard)
Data output hold time (WR standard)
ALE output delay time (BCLK standard)
ALE output hold time (BCLK standard)
ALE output delay time (Address standard)
ALE output hold time (Address standard)
After address RD signal output delay time
After address WR signal output delay time
Address output floating start time
*1 Calculated by the following formulas accord-
ing to the frequency of BCLK.
9
Th (RD-AD)=
Th (WR-AD)=
Th (RD-CS)=
Th (WR-CS)=
Td (DB-WR)=
Th (WR-DB)=
Td (AD-ALE)=
10
f(BCLK) x 2
10
f(BCLK) x 2
10
f(BCLK) x 2
10
f(BCLK) x 2
9
10
f(BCLK) x 2
10
f(BCLK) x 2
10
f(BCLK) x 2
9
9
9
x 3
9
[ns]
[ns]
[ns]
[ns]
-40 [ns]
[ns]
9
-25 [ns]
Actual MCU
[ns]
Min.
4
(*1)
(*1)
4
(*1)
(*1)
0
0
4
(*1)
(*1)
-4
(*1)
30
0
0
○○○○○○○○○○○○○○○○○○○○○○○○○○○○
*2 Calculated by the following formulas accord-
ing to the frequency of BCLK.
9
Th (RD-AD)=
Th (WR-AD)=
10
f(BCLK) x 2
9
10
f(BCLK) x 2
Max.
25
25
25
25
40
25
8
-3 [ns]
-3 [ns]
This product
[ns]
Min.
Max.
See left
See left
(*2)
(*2)
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
( 49 / 78 )
Page 50

Memory expansion mode and microprocessor mode
(with wait, accessing external memory area and using multiplex bus)
Read timing
BCLK
CSi
ADi
DBi
ADi
BHI
ALE
RD
VCC = 5 V
Write timing
BCLK
CSi
ADi
DBi
ADi
BHI
ALE
WR, WRL,
WRH
Conditions:
CC =5 V
• V
• Input timing voltage: VIL = 0.8 V, VIH = 2.5 V
• Output timing voltage: VOL = 0.8 V, VOH = 2.0 V
Figure 5.3 Memory expansion mode and microprocessor mode (with wait, multiplex bus)
( 50 / 78 )
Page 51

(4) Timing Requirements
Table 5.5, Figures 5.4 and 5.5 show timing requirements in the memory expansion mode and the
microprocessor mode.
Table 5.5 Timing requirements (VCC =5 V)
Actual MCU
Symbol
Item
[ns]
Min.
Tsu (DB-RD)
Tsu (RDY-BCLK)
Tsu (HOLD-BCLK)
Th (RD-DB)
Th (BCLK-RDY)
Th (BCLK-HOLD)
Td (BCLK-HDLA)
Data input setup time
RDY* input setup time
HOLD* input setup time
Data input hold time
RDY* input hold time
HOLD* input hold time
HLDA* output delay time
40
30
40
0
0
0
*1 Minimum 7 ns (The definition is different from that of actual MCUs. For details, see Figure 5.5.)
Memory expansion mode and microprocessor mode
(only for "with wait")
Max.
40
This product
[ns]
Max.
Min.
See left
45
(*1)
See left
See left
See left
See left
VCC =5 V
BCLK
RD
(separate bus)
WR, WRL, WRH
(separate bus)
RD
(multiplex bus)
WR, WRL, WRH
(multiplex bus)
RDY input
Figure 5.4 Timing requirements
Conditions:
CC =5 V
• V
• Input timing voltage: VIL = 1.0 V, VIH = 4.0 V
• Output timing voltage: VOL = 2.5 V, VOH = 2.5 V
( 51 / 78 )
Page 52

Common to "with wait" and "no-wait" (actual MCU)
BCLK
HOLD input
HLDA output
P0, P1, P2,
P3, P4,
P50 to P52
Common to "with wait" and "no-wait" (This product)
BCLK
HOLD input
HLDA output
P0, P1, P2,
P3, P4,
P50 to P52
VCC = 5 V
Note 1. P00 to P52 will be high-impedance status regardless of the input level of BYTE pin and
ports P40 to P43 function selection bit (PM06) of the processor mode register 0.
Note 2. This product will be high-impedance delaying by 2.5 cycles than an actual MCU.
Note 3. The setup time of HOLD is defined by the startup of BSLK, differently from that of
actual MCUs.
Conditions:
CC =5 V
• V
• Input timing voltage: VIL = 1.0 V, VIH = 4.0 V
• Output timing voltage: VOL = 2.5 V, VOH = 2.5 V
Figure 5.5 Timing requirements
( 52 / 78 )
Page 53

5.3 Operation Timing in Memory Expansion and Microprocessor Modes (3 V)
(1) Separate Bus, No-Wait
Table 5.6 and Figure 5.6 show the bus timing in the memory expansion mode and the microprocessor
mode (separate bus, no-wait).
Table 5.6 Memory expansion mode and microprocessor mode (separate bus, no-wait)
Actual MCU
Min.
4
0
0
4
-4
0
0
4
(*1)
0
[ns]
Max.
60
60
60
60
60
80
Symbol Item
Td (BCLK-AD)
Th (BCLK-AD)
Th (RD-AD)
Th (WR-AD)
Td (BCLK-CS)
Th (BCLK-CS)
Td (BCLK-ALE)
Th (BCLK-ALE)
Td (BCLK-RD)
Th (BCLK-RD)
Td (BCLK-WR)
Th (BCLK-WR)
Td (BCLK-DB)
Th (BCLK-DB)
Td (DB-WR)
Th (WR-DB)
Address output delay time
Address output hold time (BCLK standard)
Address output hold time (RD standard)
Address output hold time (WR standard)
Chip-select output delay time
Chip-select output hold time (BCLK standard)
ALE signal output delay time
ALE signal output hold time
RD signal output delay time
RD signal output hold time
WR signal output delay time
WR signal output hold time
Data output delay time (BCLK standard)
Data output hold time (BCLK standard)
Data output delay time (WR standard)
Data output hold time (WR standard)
This product
[ns]
Min. Max.
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
*1 Calculated by the following formula according to the frequency of BCLK.
9
Td (DB-WR)=
10
f(BCLK) x 2
-80 [ns]
( 53 / 78 )
Page 54

Memory expansion mode and microprocessor mode (no-wait)
Read timing
BCLK
CSi
ADi
BHE
ALE
RD
DB
Write timing
VCC = 3 V
BCLK
CSi
ADi
BHE
ALE
WR, WRL,
WRH
DB
Conditions:
CC =3 V
• V
• Input timing voltage: VIL = 0.48 V, VIH = 1.5 V
• Output timing voltage: VOL = 1.5 V, VOH = 1.5 V
Figure 5.6 Memory expansion mode and microprocessor mode (no-wait)
( 54 / 78 )
Page 55

(2) Separate Bus, With Wait, Accessing External Memory Area
Table 5.7 and Figure 5.7 show the bus timing in the memory expansion mode and the microprocessor
mode (with wait, accessing external memory area and using multiplex bus).
Table 5.7 Memory expansion mode and microprocessor mode (with wait, external memory area)
Symbol
Td (BCLK-AD)
Th (BCLK-AD)
Th (RD-AD)
Th (WR-AD)
Td (BCLK-CS)
Th (BCLK-CS)
Td (BCLK-ALE)
Th (BCLK-ALE)
Td (BCLK-RD)
Th (BCLK-RD)
Td (BCLK-WR)
Th (BCLK-WR)
Td (BCLK-DB)
Th (BCLK-DB)
Td (DB-WR)
Th (WR-DB)
Item
Address output delay time
Address output hold time (BCLK standard)
Address output hold time (RD standard)
Address output hold time (WR standard)
Chip-select output delay time
Chip-select output hold time (BCLK standard)
ALE signal output delay time
ALE signal output hold time
RD signal output delay time
RD signal output hold time
WR signal output delay time
WR signal output hold time
Data output delay time (BCLK standard)
Data output hold time (BCLK standard)
Data output delay time (WR standard)
Data output hold time (WR standard)
Actual MCU
[ns]
Min.
4
0
0
4
-4
0
0
4
(*1)
0
Max.
60
60
60
60
60
80
This product
[ns]
Min. Max.
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
*1 Calculated by the following formula according to the frequency of BCLK.
9
10
Td (DB-WR)=
f(BCLK)
-80 [ns]
( 55 / 78 )
Page 56

Memory expansion mode and microprocessor mode
(with wait, accessing external memory area)
Read timing
BCLK
CSi
ADi
BHE
ALE
RD
DB
Write timing
VCC = 3 V
BCLK
CSi
ADi
BHE
ALE
WR, WRL,
WRH
DBi
Conditions:
CC =3 V
• V
• Input timing voltage: VIL = 0.48 V, VIH = 1.5 V
• Output timing voltage: VOL = 1.5 V, VOH = 1.5 V
Figure 5.7 Memory expansion mode and microprocessor mode (with wait)
( 56 / 78 )
Page 57

(3) Multiplex Bus, With Wait, Accessing External Memory Area
Table 5.8 and Figure 5.8 show the bus timing in the memory expansion mode and the microprocessor
mode (with wait, accessing external memory area and using multiplex bus).
Table 5.8 Memory expansion mode and microprocessor mode (with wait, multiplex bus)
Symbol Item
Td (BCLK-AD)
Th (BCLK-AD)
Th (RD-AD)
Th (WR-AD)
Td (BCLK-CS)
Th (BCLK-CS)
Th (RD-CS)
Th (WR-CS)
Td (BCLK-RD)
Th (BCLK-RD)
Td (BCLK-WR)
Th (BCLK-WR)
Td (BCLK-DB)
Th (BCLK-DB)
Td (DB-WR)
Th (WR-DB)
Td (BCLK-ALE)
Th (BCLK-ALE)
Td (AD-ALE)
Th (ALE-AD)
Td (AD-RD)
Td (AD-WR)
Tdz (RD-AD)
Address output delay time
Address output hold time (BCLK standard)
Address output hold time (RD standard)
Address output hold time (WR standard)
Chip-select output delay time
Chip-select output hold time (BCLK standard)
Chip-select output hold time (RD standard)
Chip-select output hold time (WR standard)
RD signal output delay time
RD signal output hold time
WR signal output delay time
WR signal output hold time
Data output delay time (BCLK standard)
Data output hold time (BCLK standard)
Data output delay time (WR standard)
Data output hold time (WR standard)
ALE output delay time (BCLK standard)
ALE output hold time (BCLK standard)
ALE output delay time (Address standard)
ALE output hold time (Address standard)
After address RD signal output delay time
After address WR signal output delay time
Address output floating start time
Actual MCU
[ns]
Min.
4
(*1)
(*1)
4
(*1)
(*1)
0
0
4
(*1)
(*1)
-4
(*1)
50
0
0
Max.
60
60
60
60
80
60
8
This product
[ns]
Min.
Max.
See left
See left
(*2)
(*2)
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
See left
*1 Calculated by the following formulas accord-
ing to the frequency of BCLK.
9
Th (RD-AD)=
Th (WR-AD)=
Th (RD-CS)=
Th (WR-CS)=
Td (DB-WR)=
Th (WR-DB)=
Td (AD-ALE)=
10
f(BCLK) x 2
10
f(BCLK) x 2
10
f(BCLK) x 2
10
f(BCLK) x 2
9
10
f(BCLK) x 2
10
f(BCLK) x 2
10
f(BCLK) x 2
9
9
9
x 3
9
[ns]
[ns]
[ns]
[ns]
-80 [ns]
[ns]
9
-45 [ns]
( 57 / 78 )
○○○○○○○○○○○○○○○○○○○○○○○○○○○○
*2 Calculated by the following formulas accord-
ing to the frequency of BCLK.
9
Th (RD-AD)=
Th (WR-AD)=
10
f(BCLK) x 2
9
10
f(BCLK) x 2
-5 [ns]
-5 [ns]
Page 58

Memory expansion mode and microprocessor mode
(with wait, accessing external memory area and using multiplex bus)
Read timing
BCLK
CSi
ADi
DBi
ADi
BHI
ALE
RD
VCC = 3 V
Write timing
BCLK
CSi
ADi
DBi
ADi
BHI
ALE
WR, WRL,
WRH
Conditions:
• V
CC =3 V
• Input timing voltage: VIL = 0.48 V, VIH = 1.5 V
• Output timing voltage: VOL = 1.5 V, VOH = 1.5 V
Figure 5.8 Memory expansion mode and microprocessor mode (with wait, multiplex bus)
( 58 / 78 )
Page 59

(4) Timing Requirements
Table 5.9, Figures 5.9 and 5.10 show timing requirements in the memory expansion mode and the
microprocessor mode.
Table 5.9 Timing requirements (VCC = 3 V)
Actual MCU
Symbol
Item
[ns]
Min.
Tsu (DB-RD)
Tsu (RDY-BCLK)
Tsu (HOLD-BCLK)
Th (RD-DB)
Th (BCLK-RDY)
Th (BCLK-HOLD)
Td (BCLK-HDLA)
Data input setup time
RDY* input setup time
HOLD* input setup time
Data input hold time
RDY* input hold time
HOLD* input hold time
HLDA* output delay time
80
60
80
0
0
0
*1 Minimum 7 ns (The definition is different from that of actual MCUs. For details, see Figure 5.10.)
Memory expansion mode and microprocessor mode
(only with wait)
Max.
100
This product
[ns]
Max.
Min.
See left
80
(*1)
See left
See left
See left
See left
VCC = 3 V
BCLK
RD
(separate bus)
WR, WRL, WRH
(separate bus)
RD
(multiplex bus)
WR, WRL, WRH
(multiplex bus)
RDY input
Figure 5.9 Timing requirements
Conditions:
• V
CC = 3 V
• Input timing voltage: VIL = 0.6 V, VIH = 2.4 V
• Output timing voltage: VOL = 1.5 V, VOH = 1.5 V
( 59 / 78 )
Page 60

Memory expansion mode and microprocessor mode
Common to "with wait" and "no-wait" (actual MCU)
BCLK
HOLD input
HLDA output
P0, P1, P2,
P3, P4,
P50 to P52
Common to "with wait" and "no-wait" (this product)
BCLK
HOLD input
HLDA output
VCC = 3 V
P0, P1, P2,
P3, P4,
P50 to P52
Note 1. P0
0 to P52 will be high-impedance status regardless of the input level of BYTE pin and
ports P40 to P43 function selection bit (PM06) of the processor mode register 0.
Note 2. This product will be high-impedance delaying by 2.5 cycles than an actual MCU.
Note 3. The setup time of HOLD is defined by the startup of BSLK, differently from that of
actual MCUs.
Conditions:
CC =3 V
• V
• Input timing voltage: VIL = 0.6 V, VIH = 2.4 V
• Output timing voltage: VOL = 1.5 V, VOH = 1.5 V
Figure 5.10 Timing requirements
( 60 / 78 )
Page 61

5.4 Electrical Characteristics
Tables 5.10 and 5.11 list IC electrical characteristics of the user interface.
Table 5.10 Electrical characteristics of 74HC4066AFT
(P100 to P107, AN0 to AN7, AN00 to AN07, AN20 to AN27)
Symbol
IHC
V
VILC
RON
RON
Table 5.11 Electrical characteristics of M60081L-0142FP (P00 to P57)
High level control input voltage
Low level control input voltage
ON resistance
Difference of ON resistances
Parameter
V
4.5
4.5
4.5
4.5
Standard values
Unit
Standard
CC
Min.
3.15
96
10
Max.
1.35
200
V
V
Ω
Ω
Symbol
VIL
VIH
VOH
VOL
IOL
IOH
IIL
IIH
IOZL
IOZH
CIO
Parameter
Input voltage
Output voltage
Output current
Input leak current
OFF state output leak current
I/O pin capacity
Condition
VCC = 4.5 V
CC = 5.5 V
V
VCC = 5.0 V
|IO| < 1 µA
CC = 4.5 V
V
VOL = 0.4 V
CC = 4.5 V
V
VOH = 4.1 V
CC = 5.5 V
V
VI = 0 V
V
CC = 5.5 V
VI = 5.5 V
CC = 5.5 V
V
VO = 0 V
CC = 5.5 V
V
VO = 5.5 V
f = 1 MHz
CC = 0 V
V
Standard values
Standard
Min.
0
3.85
4.95
8
-1
-1
-1
-1 +1
Max.
1.35
5.5
0.05
-8
+1
+1
+1
157
Unit
V
V
V
mA
mA
µA
µA
µA
µA
pF
( 61 / 78 )
Page 62

5.5 Connection Diagram
Figures 5.11 and 5.12 show the connection diagram of M30620T2-RPD-E. This connection diagram
mainly shows the interface section, and the circuits which are not connected to the target system such
as the emulator's control system are omitted.
Figure 5.11 Connection diagram 1
( 62 / 78 )
Page 63

Figure 5.12 Connection diagram 2
( 63 / 78 )
Page 64

5.6 External Dimensions
(1) External Dimensions of Emulation Pod
Figure 5.13 External dimensions of M30620T2-RPD-E
( 64 / 78 )
Page 65

(2) External Dimensions of Pitch Converter Board (FLX-100LCC)
Figure 5.14 shows the external dimensions of the pitch converter board FLX-100LCC for 100-pin
LQFP (100D0).
Figure 5.14 External dimensions of pitch converter board (FLX-100LCC)
( 65 / 78 )
Page 66

MEMO
( 66 / 78 )
Page 67

Chapter 6. Troubleshooting
This chapter describes how to troubleshoot when this product does not work properly.
6.1 Flowchart to Remedy the Troubles ............................................................................................ 68
6.2 When the Emulator Debugger Does Not Start Up Properly.......................................................69
(1) When the LED Display of PC4701 is Abnormal.................................................................. 69
(2) Errors Occur When the Emulator Debugger Starts Up
(When the target system is connected) ......................................................................70
(3) Errors Occur When the Emulator Debugger Starts Up
(When the target system is not connected) ................................................................ 71
6.3 Operation Differs from That of PROM Version MCUs.............................................................71
(1) Does Not Operate with Operating Frequencies (3.6 V to 5.5 V) Properly...........................71
(2) Does Not Operate with Operating Frequencies (2.7 V to 3.6 V) Properly...........................71
(3) Cannot Reset from Target System ........................................................................................ 71
(4) Data Values of ROM Area at Power-on are Different.......................................................... 72
(5) HOLD* control ..................................................................................................................... 72
(6) A-D Conversion Values are Different from Expected Values..................................................72
(7) Outputs of ALE, Address and Others are Different from Those of Actual MCUs .................... 72
( 67 / 78 )
Page 68

Chapter 6. Troubleshooting
6.1 Flowchart to Remedy the Troubles
Figure 6.1 shows the flowchart to remedy the troubles from when power to the emulator is activated
until the emulator debugger starts up. Check this while the target system is disconnected.
Turning on the power of PC4701
Front panel LED status of
PC4701
Init dialog box of emulator
debugger displayed
Program window of emulator debugger displayed
LED status not normal
Display not normal.
Error displayed.
1. Check emulator system connections.
See, "3.4 Connecting the PC4701 and Emulation Pod"
(page 33).
2. Redownload the firmware.
See "4.2 Downloading Firmware" (page 40).
3. Restart the PC4701 system.
1. Check the operating environment etc. of the emulator
debugger.
See the user's manual of the emulator debugger.
2. Reinstall the emulator debugger.
Figure 6.1 Flowchart to remedy the troubles
( 68 / 78 )
Page 69

6.2 When the Emulator Debugger Does Not Start Up Properly
(1) When the LED Display of PC4701 is Abnormal
Table 6.1 LED's abnormal display and its checkpoints
Error
LEDs do not light up.
All LEDs remain lit.
Connection to
the target system
-
-
Recheck the power cable is connected to the
PC4701.
See the instruction manual of the PC4701.
Recheck the connection between the PC4701 and
this product.
See "3.4 Connecting the PC4701 and Emulation
Pod" (page 33).
Checkpoint
The "POWER" LED of
"STATUS OF TARGET"
does not light up.
The "CLOCK" LED of
"STATUS OF TARGET"
does not light up.
Connected
Disconnected
Connected
Check power is properly supplied to the target
system and that the target system is properly
grounded.
(1) Check that both the main and sub clocks of the
emulator debugger are not set to "EXT".
See the CLK command of the emulator
debugger.
(2) Check the oscillation circuit in the emulation
pod is oscillating.
See "3.3 Selecting Clock Supply" (page 29).
(1) Check the oscillation circuit in the target system
is oscillating.
(2) Check the switches in the emulation pod are
correctly set.
See "3.2 Setting Switches and Pullup Resistor"
(page 25).
( 69 / 78 )
Page 70

(2) Errors Occur When the Emulator Debugger Starts Up
(When the target system is connected)
Table 6.2 Checkpoints of errors when starting up the emulator debugger (target is connected)
Error Checkpoint
Communication error occurred
Data was not sent to the target
Target system cannot be properly built
PD30 version is not the same version as the
firmware in the target
Target MCU is in the reset state
Target MCU cannot be reset
Target is in HOLD state
Check all emulator debugger settings, interface cable
connection and switches on the rear of the PC4701 match.
See the instruction manuals of the PC4701 and the
emulator debugger.
(1) Download the proper firmware.
See "4.2 Downloading Firmware" (page 40).
(2) Recheck the connection between the PC4701 and
this product.
See "3.4 Connecting the PC4701 and Emulation
Pod" (page 33).
Download the proper firmware.
See "4.2 Downloading Firmware" (page 40).
Check the reset pin of the target system has changed
from "Low" to "High" level.
(1) If the reset circuit of the target system has a watchdog
timer, disable the timer.
(2) Check power is properly supplied to the target system
and that the target system is properly grounded.
(3) The program may be uncontrollable in areas where
memory not allocated. Recheck the map setting.
(1) The MCU is either in the stop mode or wait mode.
Either reset the MCU or cancel the mode with an
interrupt.
See the MCU specifications.
(2) The program may be uncontrollable in areas where
memory not allocated. Recheck the map setting.
Target clock is stopped
Target MCU is not receiving power
(1) Check the oscillation circuit of the target system is
oscillating properly.
(2) Check the switches in the emulation pod are correctly
set.
See "3.2 Setting Switches and Pullup Resistor"
(page 25).
Check power is properly supplied to the target system
and that the target system is properly grounded.
( 70 / 78 )
Page 71

(3) Errors Occur When the Emulator Debugger Starts Up
(When the target system is not connected)
Table 6.3 Checkpoints of errors when starting up the emulator debugger (target is not connected)
Error Checkpoint
Communication error occurred
Data was not sent to the target
Target system cannot be properly built
PD30 version is not the same version as the
firmware in the target
Target MCU cannot be reset
Target is in HOLD state
Target clock is stopped
Check all emulator debugger settings, interface cable
connection and switches on the rear of the PC4701 match.
See the instruction manuals of the PC4701 and the
emulator debugger.
(1) Download the proper firmware.
See "4.2 Downloading Firmware" (page 40).
(2) Recheck the connection between the PC4701 and
this product.
See "3.4 Connecting the PC4701 and Emulation Pod"
(page 33).
Download the proper firmware.
See "4.2 Downloading Firmware" (page 40).
The program may be uncontrollable in areas where
memory not allocated. Recheck the map setting.
(1) The MCU is either in the stop mode or wait mode.
Either reset the MCU or cancel the mode with an
interrupt.
See the MCU specifications.
(2) The program may be uncontrollable in areas where
memory not allocated. Recheck the map setting.
Check the switches in the emulation pod are correctly set.
See "3.2 Setting Switches and Pullup Resistor" (page 25).
6.3 Operation Differs from That of PROM Version MCUs
(1) Does Not Operate with Operating Frequencies (3.6 V to 5.5 V) Properly
With this product, you need to change the switch setting according to the operation voltage. Change
the setting as described below. For details, see "3.2 Setting Switches and Pullup Resistor" (page 25).
L
JP2
(Factory-setting)
JP2
L
JP2
(2) Does Not Operate with Operating Frequencies (2.7 V to 3.6 V) Properly
See (1) above.
(3) Cannot Reset from Target System
Set the time for starting up (0.2 Vcc to 0.8 Vcc) 1 µs or less.
Set when using at the range of the target voltage
H
within +3.6 to +5.5 V or not connecting the target
system.
Set when using at the range of the target voltage
H
within +2.7 to +3.6 V.
( 71 / 78 )
Page 72

(4) Data Values of ROM Area at Power-on Are Different
For this product, 04h is written into the ROM area at power-on. Therefore, the data values are different
from those of an actual MCU.
(5) HOLD* control
When inputting "Low" to the HOLD* pin to run into the HOLD state, P00 to P52 will be in the HOLD
state delaying by 2.5 cycles than the actual MCU (see Table 5.5, Figure 5.5, Table 5.9 and Figure
5.10).
(6) A-D Conversion Values are Different from Expected Values
To use the A-D input group selection function, following settings are required.
1) To select A-D input for port P0
• Set the whole 8-bit direction registers of P107 to P100 to input.
• Set P107 to P100 to no pullup for pullup control resister setting.
• P107 to P100 cannot be used for the input pins of I/O port and key input interrupt functions.
2) To select A-D input for port P2
• Set the whole 8-bit direction registers of P107 to P100 to input.
• Set P107 to P100 to no pullup for pullup control resister setting.
• P107 to P100 cannot be used for the input pins of I/O port and key input interrupt functions.
3) To select A-D input for port P10
• There is no limitation.
As a flexible cable, a pitch converter board and other devices are used between the evaluation MCU
and the target system, some characteristics are slightly different from those of the actual MCU.
Therefore, be sure to evaluate your system with an evaluation MCU. Before starting mask production,
evaluate your system and make final confirmation with an ES (Engineering Sample) version MCU.
(7) Outputs of ALE, Address and Others are Different from Those of Actual MCUs
1) ALE signal output in accessing the SFR area
2) Address, BHE* and ALE signal outputs in accessing the internal RAM and ROM
3) State of the data bus in the stop mode and wait mode
For details, see Chapter 1 "Note on Differences between Actual MCU and Emulator" (page 14).
( 72 / 78 )
Page 73

Chapter 7. Maintenance and Guarantee
This chapter describes how to maintenance, repair provisions and how to request for repair.
7.1 Maintenance ............................................................................................................................... 74
7.2 Guarantee....................................................................................................................................74
7.3 Repair Provisions........................................................................................................................74
7.4 How to Request for Repair ......................................................................................................... 75
( 73 / 78 )
Page 74

Chapter 7. Maintenance and Guarantee
7.1 Maintenance
If dust or dirt collects on any equipment of your emulation system, wipe it off with a dry soft cloth.
Do not use thinner or other solvents because these chemicals can cause the equipment's surface
coating to separate.
7.2 Guarantee
If your product becomes faulty within twelve months after its purchase while being used under good
conditions by observing "Precautions for Safety" described in Chapter 1 of this user's manual, we will
repair or replace your faulty product free of charge. Note, however, that if your product's fault is raised
by any one of the following causes, we will repair it or replace it with new one with extra-charge:
• Misuse, abuse, or use under extraordinary conditions
• Unauthorized repair, remodeling, maintenance, and so on
• Inadequate user's system or misuse of it
• Fires, earthquakes, and other unexpected disasters
In the above cases, contact your local distributor. If your product is being leased, consult the leasing
company or the owner.
7.3 Repair Provisions
(1) Repair with extra-charge
The products elapsed more than twelve months after purchase can be repaired with extra-charge.
(2) Replacement with extra-charge
If your product's fault falls in any of the following categories, the fault will be corrected by
replacing the entire product instead of repair, or you will be advised to purchase new one,
depending on the severity of the fault.
• Faulty or broken mechanical portions
• Flaw, separation, or rust in coated or plated portions
• Flaw or cracks in plastic portions
• Faults or breakage caused by improper use or unauthorized repair or modification
• Heavily damaged electric circuits due to overvoltage, overcurrent or shorting of power supply
• Cracks in the printed circuit board or burnt-down patterns
• Wide range of faults that makes replacement less expensive than repair
• Unlocatable or unidentified faults
(3) Expiration of the repair period
When a period of twelve months elapses after the model was dropped from production, repairing
products of the model may become impossible.
(4) Transportation fees at sending your product for repair
Please send your product to us for repair at your expense.
( 74 / 78 )
Page 75

7.4 How to Request for Repair
If your product is found faulty, follow the procedure below to send your product for repair.
Customer Fill in the Repair Request Sheet included with this product, then send it
along with this product for repair to your local distributor. Make sure
that information in the Repair Request Sheet is written in as much detail
as possible to facilitate repair.
Distributor After checking the contents of fault, the distributor should please send
the faulty product along with the Repair Request Sheet to Renesas
Solutions Corp.
Renesas Solutions When the faulty product is repaired, it will be returned to the customer
at the earliest convenience.
CAUTION
Note on Transporting the Product:
•When sending your product for repair, use the packing box and cushion material supplied with this
product when delivered to you and specify handling caution for it to be handled as precision
equipment. If packing of your product is not complete, it may be damaged during transportation.
When you pack your product in a bag, make sure to use conductive polyvinyl supplied with this
product (usually a blue bag). When you use other bags, they may cause a trouble on your product
because of static electricity.
( 75 / 78 )
Page 76

MEMO
( 76 / 78 )
Page 77

M30620T2-RPD-E User's Manual
Rev. 1.00
July 1, 2003
REJ10J0196-0100Z
COPYRIGHT ©2003 RENESAS TECHNOLOGY CORPORATION
AND RENESAS SOLUTIONS CORPORATION ALL RIGHTS RESERVED
Page 78

 Loading...
Loading...