

Remote Automation Solutions FloBoss 107 Flow Manager Instruction Manual (Russian) Manuals & Guides [ru]
Page 1

Форма A6206
Номер детали D301232X012
Февраль 2007 г.
Контроллер расхода FloBoss 107 Руководство по эксплуатации
Remote Automation Solutions
Page 2

FloBoss 107. Руководство по эксплуатации
Лист изменений
Февраль 2007 г.
Данное руководство может периодически пересматриваться с целью внесения в него новой
или обновленной информации. Дата изменения страницы указывается напротив номера
страницы в ее нижней части. При изменении даты обновления любой страницы также
изменяется дата всего руководства, которая указывается на первой странице обложки.
Ниже перечислены даты обновления каждой из страниц.
Страница Редакция
Первая редакция Февраль 2007 г.
ROCLINK и FloBoss являются товарными знаками одной из компаний подразделения Emerson Process
Management. Логотип Emerson является товарным знаком и знаком обслуживания компании Emerson Electric
Co. Все остальные товарные знаки являются собственностью соответствующих владельцев.
© 2007 Remote Automation Solutions, подразделение Emerson Process Management. Все права защищены.
Отпечатано в США.
www.EmersonProcess.com/flow
Несмотря на то что представленная информация является достоверной и мы убеждены в ее точности,
компания Emerson Process Management не гарантирует, что при практическом применении этих данных будут
получены удовлетворительные результаты. Любая информация, содержащаяся в данном документе, не
может рассматриваться как гарантия, явно или неявно выраженная, относящаяся к техническим
характеристикам, товарному состоянию, пригодности или к другим свойствам изделий, а также не
является рекомендацией по использованию изделий или процессов, нарушающих патентное право. Компания
Emerson Process Management оставляет за собой право вносить любые изменения и усовершенствования в
конструкции и характеристики описанных в данном документе изделий в любое время и без предварительного
уведомления.
ii Дата выпуска: февраль 2007 г.
Page 3
Содержание
Глава 1 – Общие сведения 1-1
1.1 Область применения руководства ................................................................................ 1-2
1.2 Обзор контроллера FloBoss 107.................................................................................... 1-2
1.3 Оборудование ................................................................................................................. 1-7
1.3.1 Процессор и память ......................................................................................... 1-7
1.3.2 Объединительная (задняя) панель................................................................. 1-7
1.3.3 Блок расширения.............................................................................................. 1-8
1.3.4 Центральный процессор (CPU)....................................................................... 1-8
1.3.5 Резервная память с батареей и суперконденсатором.................................. 1-9
1.3.6 Встроенные входы и выходы .......................................................................... 1-9
1.3.7 Встроенные порты передачи данных ........................................................... 1-10
1.3.8 Встроенный терморезистор (RTD) ................................................................ 1-12
1.3.9 Встроенный выход "токовой петли" .............................................................. 1-12
1.3.10 Дополнительные входы и выходы ................................................................ 1-12
1.3.11 Дополнительный коммуникационный модуль – COM3 ............................... 1-13
1.3.12 Дополнительный модуль многопараметрического сенсора (MVS)............ 1-14
1.3.13 Дополнительный лицензионный ключ .......................................................... 1-14
1.4 Микропрограммное обеспечение ................................................................................ 1-15
1.4.1 Архивные точки............................................................................................... 1-17
1.4.2 Журнал аварийной сигнализации ................................................................. 1-19
1.4.3 Журнал событий ............................................................................................. 1-19
1.4.4 Защита............................................................................................................. 1-20
1.4.5 База данных ввода/вывода ........................................................................... 1-21
1.4.6 Таблицы функциональных последовательностей (FST) ............................ 1-21
1.4.7 PID Control ....................................................................................................... 1-21
1.4.8 Аварийная сигнализация по методу спонтанного сообщения
о возникновении исключительной ситуации (SRBX)................................... 1-22
1.4.9 Программные точки ........................................................................................ 1-22
1.4.10 Коды Opcode ...................................................................................................1-23
1.4.11 Транзитная передача данных ....................................................................... 1-23
1.4.12 Протоколы ROC и Modbus ............................................................................. 1-23
1.4.13 Программы на языке User C .......................................................................... 1-24
1.5 Конфигурационное программное обеспечение ROCLINK 800 ................................. 1-24
1.6 Электронные компоненты изделия ............................................................................. 1-26
1.6.1 Часы реального времени............................................................................... 1-26
1.6.2 Диагностический контроль............................................................................. 1-27
1.6.3 Автоматическое самотестирование.............................................................. 1-27
1.6.4 Режим малого потребления энергии ............................................................ 1-28
1.7 Измерения расхода ...................................................................................................... 1-28
1.8 Дополнительные сведения .......................................................................................... 1-30
Глава 2 – Установка и эксплуатация 2-1
2.1 Требования к установке ................................................................................................. 2-1
2.1.1 Требования к окружающей среде ................................................................... 2-2
2.1.2 Требования к рабочей площадке.................................................................... 2-2
2.1.3 Соответствие стандартам для опасных зон .................................................. 2-4
2.2 Требования по электропитанию .................................................................................... 2-5
2.3 Требования по заземлению ........................................................................................... 2-6
Дата выпуска: февраль 2007 г. Содержание iii
Page 4

2.3.1 Установка заземления контроллера расхода FloBoss 107 ........................... 2-7
2.3.2 Требования по подключению входов/выходов .............................................. 2-8
2.4 Монтаж контроллера FloBoss 107 и блока расширения ............................................. 2-8
2.4.1 Необходимые инструменты............................................................................. 2-8
2.4.2 Монтаж контроллера расхода FloBoss 107 без блока расширения............. 2-9
2.4.3 Монтаж контроллера расхода FloBoss с блоком расширения ................... 2-10
2.4.4 Демонтаж блока расширения ........................................................................ 2-12
2.4.5 Снятие и установка крышек слотов для модулей ....................................... 2-13
2.4.6 Установка и снятие крышек проводных каналов......................................... 2-13
2.5 Резервная батарея ЗУ.................................................................................................. 2-14
2.5.1 Удаление и установка батареи ..................................................................... 2-15
2.6 Центральный процессор (CPU) ................................................................................... 2-15
2.6.1 Снятие модуля CPU .......................................................................................2-16
2.6.2 Установка модуля CPU ..................................................................................2-17
2.7 Лицензионные ключи.................................................................................................... 2-18
2.8 Включение и эксплуатация .......................................................................................... 2-18
2.8.1 Включение ....................................................................................................... 2-19
2.8.2 Эксплуатация .................................................................................................. 2-19
Глава 3 – Подключение электропитания 3-1
3.1 Описание разъема для подключения электропитания ............................................... 3-1
3.2 Определение потребляемой мощности .......................................................................3-3
3.3 Монтажные соединения ............................................................................................... 3-10
3.4 Подключение электропитания к модулю CPU ...........................................................3-11
Глава 4 – Входы/выходы и вход терморезистора RTD 4-1
4.1 Описание модуля ввода/вывода ................................................................................... 4-1
4.2 Установка модуля ........................................................................................................... 4-5
4.3 Удаление модуля............................................................................................................ 4-6
4.4 Подключение модуля ..................................................................................................... 4-7
4.5 Выбор типа входов/выходов .......................................................................................... 4-7
4.6 Аналоговые входы (AI) ................................................................................................... 4-9
4.6.1 Подключение аналоговых входов ................................................................. 4-10
4.7 Аналоговые выходы (AO)............................................................................................. 4-12
4.7.1 Подключение аналоговых выходов .............................................................. 4-12
4.8 Дискретные входы (DI) ................................................................................................. 4-13
4.8.1 Подключение дискретных входов ................................................................. 4-14
4.9 Дискретные выходы (DO) ............................................................................................. 4-15
4.9.1 Подключение дискретных выходов .............................................................. 4-16
4.10 Импульсные входы (PI) ................................................................................................ 4-16
4.10.1 Подключение импульсных входов ................................................................ 4-17
4.11 Вход терморезистора (RTD) ........................................................................................ 4-18
4.11.1 Подключение входа RTD ............................................................................... 4-19
Глава 5 – Передача данных 5-1
5.1 Обзор передачи данных................................................................................................. 5-1
5.2 Установка/Удаление коммуникационного модуля....................................................... 5-4
5.3 Подключение порта локального интерфейса оператора (LOI) .................................. 5-5
5.3.1 Использование LOI........................................................................................... 5-6
5.4 Подключение передачи данных EIA-485 (RS-485) ...................................................... 5-7
5.5 Подключение передачи данных EIA-232 (RS-232) ...................................................... 5-8
5.6 Подключение ЖК-дисплея ............................................................................................. 5-9
iv Содержание Дата выпуска: февраль 2007 г.
Page 5
Глава 6 – Многопараметрический сенсор (MVS) 6-1
6.1 Обзор модуля MVS ......................................................................................................... 6-1
6.2 Установка и удаление модуля MVS .............................................................................. 6-4
6.3 Конфигурирование группы модулей MVS .................................................................... 6-4
6.4 Молниезащита модуля MVS .......................................................................................... 6-7
Глава 7 – Поиск и устранение неисправностей 7-1
7.1 Общие указания .............................................................................................................. 7-2
7.2 Графический пользовательский интерфейс (GUI) ...................................................... 7-2
7.3 Контрольный перечень................................................................................................... 7-4
7.3.1 Светодиоды....................................................................................................... 7-4
7.3.2 Последовательная передача данных............................................................. 7-4
7.3.3 Входы/выходы................................................................................................... 7-5
7.3.4 Сохранение данных конфигурации и журнала .............................................. 7-6
7.3.5 Конфигурационное программное обеспечение ROCLINK 800..................... 7-7
7.3.6 Включение электропитания ............................................................................. 7-8
7.3.7 Многопараметрический сенсор (MVS)............................................................ 7-8
7.3.8 Терморезистор (RTD) ....................................................................................... 7-8
7.4 Процедуры....................................................................................................................... 7-9
7.4.1 Восстановление параметров контроллера FB107 ........................................7-9
7.4.2 Перезагрузка и повторное конфигурирование контроллера FB107 ..........7-10
7.4.3 Поиск и устранение неисправностей аналоговых входов .......................... 7-10
7.4.4 Поиск и устранение неисправностей аналоговых выходов........................ 7-12
7.4.5 Поиск и устранение неисправностей дискретных входов .......................... 7-13
7.4.6 Поиск и устранение неисправностей дискретных выходов ........................ 7-13
7.4.7 Поиск и устранение неисправностей импульсных входов.......................... 7-14
7.4.8 Поиск и устранение неисправностей входов RTD....................................... 7-15
7.4.9 Поиск и устранение неисправностей модуля MVS...................................... 7-16
Приложение A – Словарь терминов A-1
Указатель У-1
Дата выпуска: февраль 2007 г. Содержание v
Page 6

vi Содержание Дата выпуска: февраль 2007 г.
Page 7
Глава 1 – Общие сведения
В данном руководстве рассматривается контроллер расхода
FloBoss™ 107 (“FB107”), входящий в линейку контроллеров
расхода FloBoss, производимых компанией Remote Automation
Solutions, являющейся подразделением Emerson Process
Management. Информация о программном обеспечении,
применяемом для настройки FB107, приведена в документе
ROCLINK™ 800, Руководство пользователя конфигурационного
программного обеспечения (для FloBoss 107) (Форма A6217).
В данной главе представлен обзор контроллера FB107 и его
компонентов.
Содержание
1.1 Область применения руководства .................................................. 1-2
1.2 Обзор контроллера FloBoss 107...................................................... 1-2
1.3 Оборудование ...................................................................................1-7
1.3.1 Процессор и память............................................................. 1-7
1.3.2 Объединительная (задняя) панель.................................... 1-7
1.3.3 Блок расширения ................................................................. 1-8
1.3.4 Центральный процессор (CPU) .......................................... 1-8
1.3.5 Резервная память с батареей и суперконденсатором..... 1-9
1.3.6 Встроенные входы и выходы.............................................. 1-9
1.3.7 Встроенные порты передачи данных............................... 1-10
1.3.8 Встроенный терморезистор (RTD) ................................... 1-12
1.3.9 Встроенный выход "токовой петли" .................................1-12
1.3.10 Дополнительные входы и выходы ................................... 1-12
1.3.11 Дополнительный коммуникационный
модуль – COM3 .................................................................. 1-13
1.3.12 Дополнительный модуль многопараметрического
сенсора (MVS) .................................................................... 1-14
1.3.13 Дополнительный лицензионный ключ .............................1-14
1.4 Микропрограммное обеспечение .................................................. 1-15
1.4.1 Архивные точки .................................................................. 1-17
1.4.2 Журнал аварийной сигнализации ....................................1-19
1.4.3 Журнал событий ................................................................1-19
1.4.4 Защита ................................................................................ 1-20
1.4.5 База данных ввода/вывода............................................... 1-21
1.4.6 Таблицы функциональных
последовательностей (FST) .............................................1-21
1.4.7 PID Control ..........................................................................1-21
1.4.8 Аварийная сигнализация по методу спонтанного
сообщения о возникновении исключительной
ситуации (SRBX) ................................................................1-22
1.4.9 Программные точки ...........................................................1-22
1.4.10 Коды Opcode ...................................................................... 1-23
1.4.11 Транзитная передача данных........................................... 1-23
1.4.12 Протоколы ROC и Modbus ................................................ 1-23
1.4.13 Программы на языке User C .............................................1-24
1.5 Конфигурационное программное
обеспечение ROCLINK 800 ............................................................ 1-24
1.6 Электронные компоненты изделия ............................................... 1-26
1.6.1 Часы реального времени .................................................. 1-26
1.6.2 Диагностический контроль ................................................ 1-27
1.6.3 Автоматическое самотестирование................................. 1-27
1.6.4 Режим малого потребления энергии ...............................1-28
1.7 Измерения расхода ........................................................................ 1-28
1.8 Дополнительные сведения ............................................................ 1-30
FloBoss 107. Руководство по эксплуатации
Дата выпуска: февраль 2007 г. Общие сведения 1-1
Page 8
FloBoss 107. Руководство по эксплуатации
1.1 Область применения руководства
Данное руководство содержит следующие главы:
Глава 1
Общие сведения
Глава 2
Установка и
эксплуатация
Глава 3
Подключение
электропитания
Глава 4
Входы/выходы и входы
терморезистора RTD
Глава 5
Коммуникационные
модули
Глава 6
Многопараметрический
сенсор (MVS)
Раздел 7
Поиск и устранение
неисправностей
Словарь терминов Определения сокращений и терминов.
Указатель Алфавитный список всех элементов и тем,
Содержит обзор аппаратной и
микропрограммной части базового блока и
блока расширения FB107.
Содержит сведения об установке,
инструментах, монтажной схеме, а также
другие важные сведения о контроллере
FB107.
Содержит информацию о требованиях к
электропитанию для контроллера FB107.
Содержит сведения о модулях
ввода/вывода (I/O), узле ввода/вывода CPU
и о входе терморезистора RTD.
Содержит информацию о встроенных и
дополнительных коммуникационных
модулях.
Содержит сведения о дополнительном
модуле MVS.
Содержит сведения о поиске и устранении
неисправностей.
содержащихся в данном руководстве.
1.2 Обзор контроллера FloBoss 107
32-разрядный микропроцессорный контроллер расхода FB107
предназначен для электронного измерения, контроля и управления
потоком. Этот экономичный контроллер расхода надежно и точно
измеряет температуру, вычисляет расход и выполняет архивацию
данных.
Примечание: Контроллер FB107 настраивается и управляется с
помощью персонального компьютера (ПК) с
установленным программным обеспечением
ROCLINK™ 800 (“ROCLINK 800”).
Контроллер FB107 можно использовать для измерений не более
чем в четырех участках трубопровода. Измерения выполняются с
помощью различных устройств, например измерительной
диафрагмы, турбинного расходомера или других измерительных
приборов с генерацией импульсов. К контроллеру также можно
подключать аналоговые датчики. В случае если в приложении
требуется вычислять расход на нескольких сужающих устройствах,
можно использовать дополнительный коммуникационный модуль
MVS. Данный модуль позволяет подключить к контроллеру
1-2 Общие сведения Дата выпуска: февраль 2007 г.
Page 9

FloBoss 107. Руководство по эксплуатации
несколько многопараметрических сенсоров удаленного монтажа,
используя последовательный интерфейс.
Контроллер расхода FB107 архивирует данные в стандартный
архив один раз в минуту, в час, в сутки и фиксирует минимальное и
максимальное значение.Сохранение данных в дополнительный
архив выполняется с заданным интервалом времени. Контроллер
расхода FB107 предоставляет информацию в электронном виде и
заменяет традиционные диаграммы на бумажном носителе; он
регистрирует скорректированные значения расхода с
дифференциальных или импульсных счетчиков и сохраняет данные.
Контроллер FB107 вычисляет расход для объема и энергии.
Контроллер предоставляет набор функций по месту установки и
поддерживает удаленный контроль, измерение, архивацию, обмен
данными и управление. Результаты вычислений расхода
контроллер сохраняет в памяти, по запросу или с заданным
интервалом можно выполнять передачу этих данных на внешнее
устройство.
Конструкция FB107 позволяет настраивать его для определенных
областей применения, в том числе для управления с применением
логических операций и последовательного управления с
использованием таблицы функциональных последовательностей
(FST).
Дата выпуска: февраль 2007 г. Общие сведения 1-3
Page 10

FloBoss 107. Руководство по эксплуатации
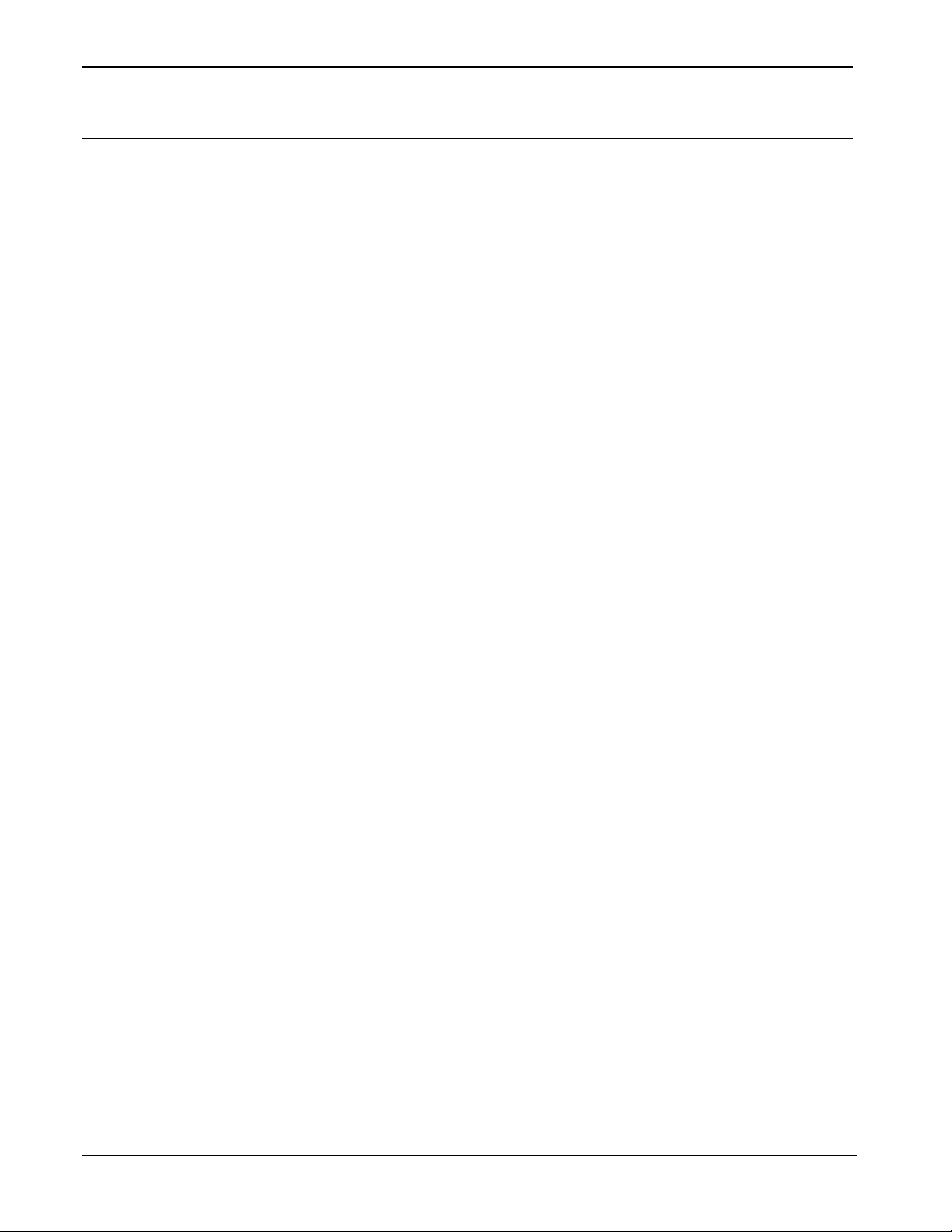
д
Локальный
(LOI) порт
обмена
Слот 0 = Модуль
CPU
Узел
ввода/вывода
CPU
Разъем для
подключения
электропитания
Разъем для
подключения
резервной
батареи ЗУ
Слот 3 = модуль
I/O или MVS
Слот 2 = модуль
ввода/вывода (I/O),
модуль MVS или
модуль COM
(COM2)
Слот 1 = модуль
ввода/вывода
(I/O), модуль MVS
или модуль COM
(COM3)
Крышка канала
проводных
соединений
Разъем для
подключения
исплея
Разъем для
подключения
двухпараметрическо
го сенсора
Рис. 1-1. Базовый блок контроллера расхода FloBoss 107
1-4 Общие сведения Дата выпуска: февраль 2007 г.
Page 11

FloBoss 107. Руководство по эксплуатации
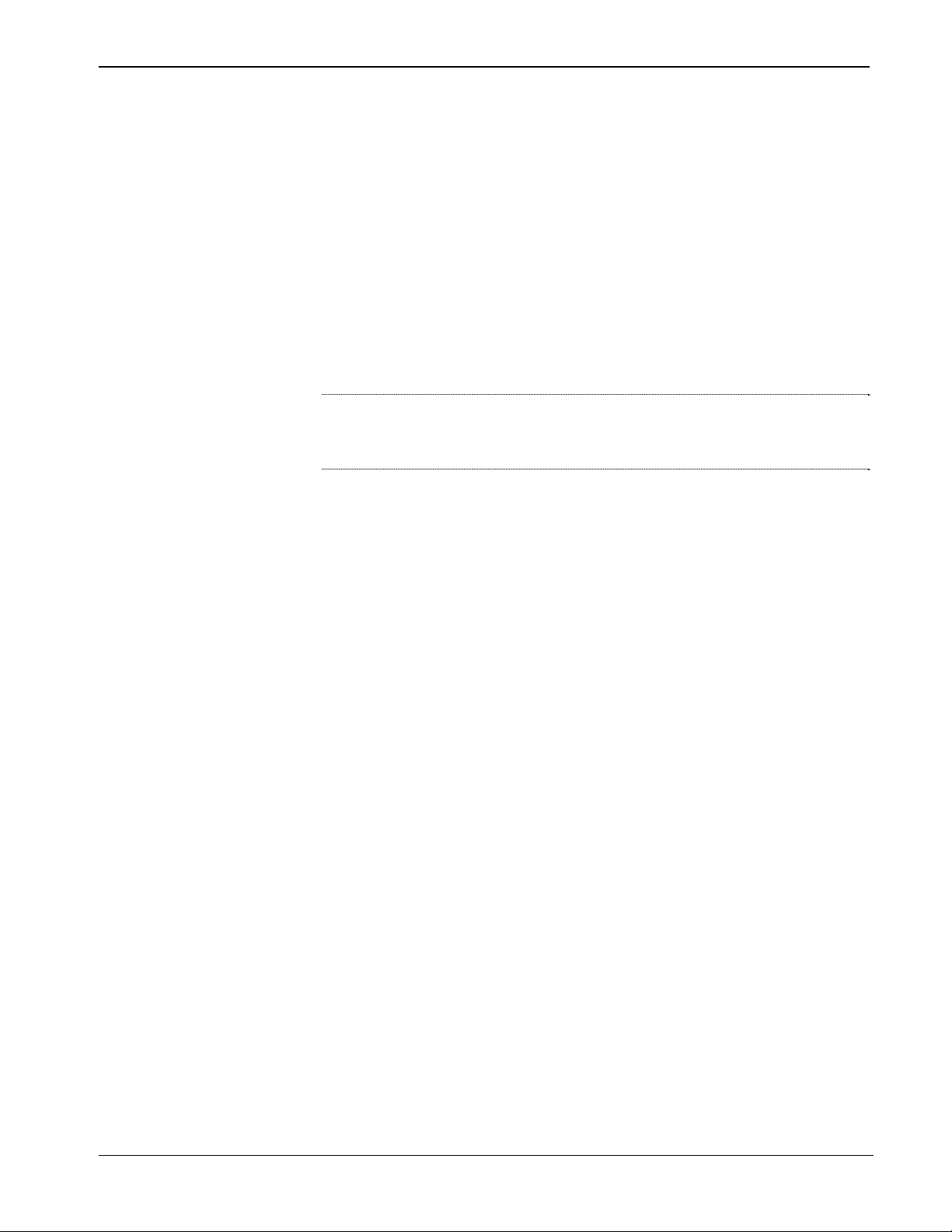
у
Слот 4 =
модуль I/O или
MVS
Слот 5 =
модуль I/O или
MVS
Подключение
к базовом
блоку FloBoss
107
Слот 7 =
модуль I/O или
MVS
Слот 6 =
модуль I/O или
MVS
Крышка канала
проводных
соединений
Рис. 1-2. Блок расширения FloBoss 107
Дата выпуска: февраль 2007 г. Общие сведения 1-5
Page 12

FloBoss 107. Руководство по эксплуатации
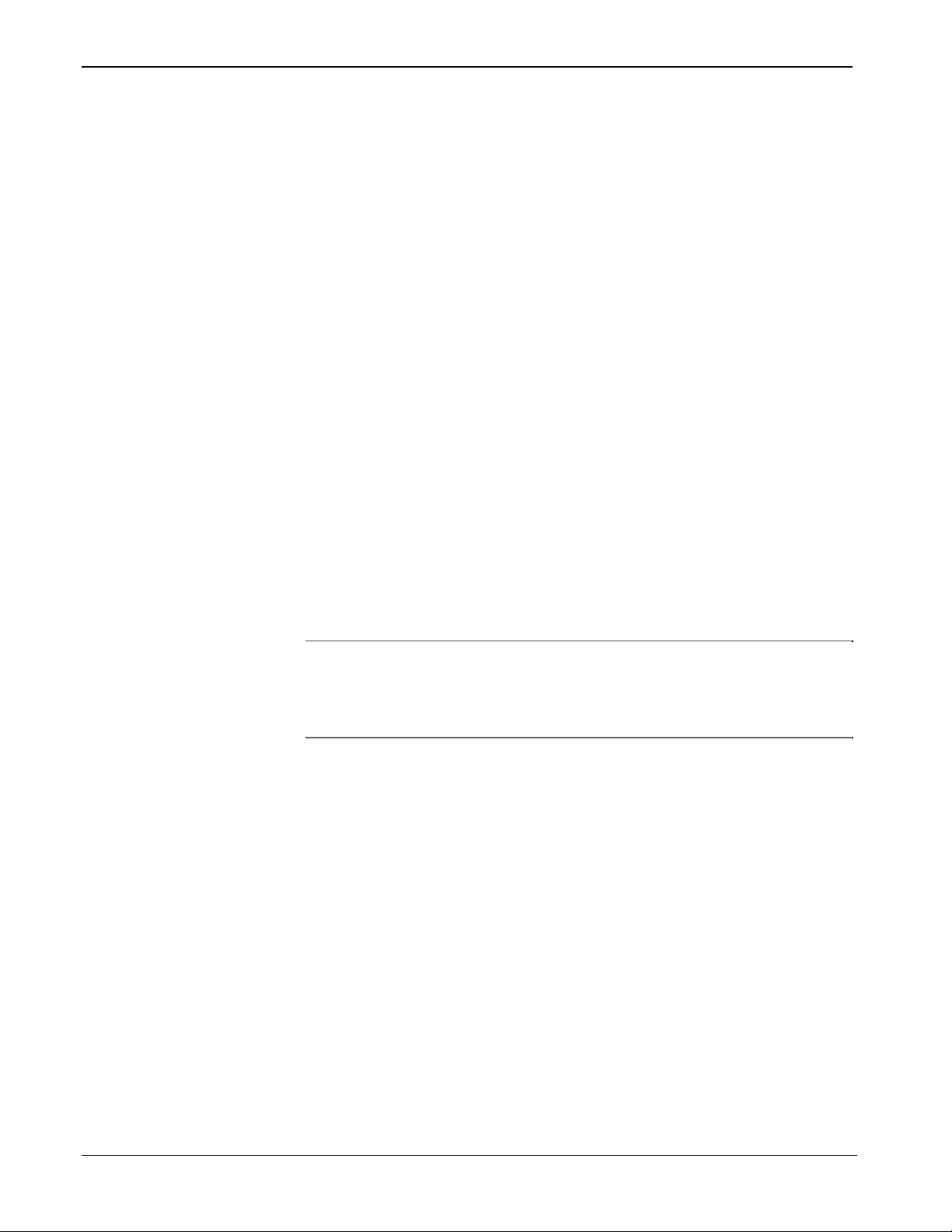
Рис. 1-3. Контроллер расхода FloBoss 107 с блоком расширения
Контроллер расхода FB107 содержит следующие компоненты и
функции:
32-разрядная плата процессора, соединительная плата и задняя
панель.
Центральный процессор (CPU).
Флэш-ПЗУ 2 Мбайт с возможностью наращивания.
2 Мбайт ОЗУ с резервным питанием от батареи.
Двух-, трех- или четырехпроводный вход 100 Ом для
терморезистора (RTD).
Резервная память с батареей и суперкондесаторами для
хранения краткосрочных и долгосрочных данных, данных
конфигурации, а также для поддержания работоспособности
контроллера FB107, когда он находится в резерве или на
хранении.
Три встроенных порта передачи данных.
Разъем для подключения электропитания и выходной разъем
электропитания.
Микропрограммное обеспечение широкого применения.
1-6 Общие сведения Дата выпуска: февраль 2007 г.
Page 13
1.3 Оборудование
FloBoss 107. Руководство по эксплуатации
Контроллер расхода FB107 поставляется в четырех основных
конфигурациях:
Неизолированный CPU без модуля ввода/вывода.
Неизолированный CPU с шестью точками ввода/вывода.
Изолированный CPU без модуля ввода/вывода.
Изолированный CPU с шестью точками ввода/вывода.
Примечание: Изоляция выполняется между CPU и внешними
логическими устройствами.
В базовом блоке контроллера расхода FB107 имеется четыре слота.
Слот 0 зарезервирован для модуля CPU с тремя портами передачи
данных, терморезистором RTD, входом электропитания, выходом
"токовой петли", системными переменными и 6 дополнительными
точками ввода/вывода.
В каждый слот 1 и 2 можно устанавливать по одному
коммуникационному модулю. В слоты 1, 2 и 3 можно
устанавливать модуль ввода/вывода (I/O), модуль MVS и модули
интеллектуальных приложений.
1.3.1 Процессор и память
В контроллере расхода FB107 используется вычислительная
мощность 32-разрядного КМОП-микропроцессора.
Микропроцессор содержит отдельную 32-разрядную внутреннюю
шину данных и отдельную 16-разрядную внешнюю шину данных.
Микропроцессор может работать в режимах с малым потреблением
энергии, включая режим простоя и режим низкой зарядки
аккумулятора. В контроллере FB107 реализован
быстродействующий прямой доступ к памяти.
Контроллер расхода FB107 оборудован статическим ОЗУ объемом
2 Мбайт для хранения базы данных, данных архивов,
конфигурации, аварийных сигналов и данных событий.
1.3.2 Объединительная (задняя) панель
Задняя панель выполняет маршрутизацию сигналов между
модулем CPU и модулями ввода/вывода, модулями
интеллектуальных приложений, блоком расширения,
многопараметрическим сенсором и коммуникационными
модулями.
Дата выпуска: февраль 2007 г. Общие сведения 1-7
Page 14

FloBoss 107. Руководство по эксплуатации
1.3.3 Блок расширения
Блок расширения позволяет добавить к контроллеру FB107 модули
ввода/вывода. Для увеличения количества входов/выходов можно
добавить дополнительный блок расширения. В контроллере FB107
можно оборудовать до 42 точек ввода/вывода. Блок расширения
поддерживает установку дополнительных модулей ввода/вывода,
MVS и модулей интеллектуальных приложений.
1.3.4 Центральный процессор (CPU)
В базовом блоке контроллера расхода FB107 имеется четыре слота.
Слот 0 предназначен для модуля CPU. Модуль CPU обеспечивает
подключение к внешним цепям, включая защиту от
перенапряжения и от статического электричества для внешних
цепей. Электронная часть включает цепи RTD и
усилители/приемники ввода/вывода.
Компоненты CPU:
Вход RTD.
Вход электропитания.
Выход "токовой петли".
Кнопкаперезагрузки (RST).
Системные переменные.
Диагностический контроль.
Часы реального времени.
Автоматическое самотестирование.
Режимы энергосбережения.
Локальный интерфейс оператора (LOI) EIA-232 (RS-232).
Коммуникационный разъем EIA-485 (RS-485) (COM1).
Коммуникационный разъем EIA-232 (RS-232) (COM2).
Флэш-память загрузки – инициализация и диагностика системы.
Статическое ОЗУ с резервным питанием от батареи – Хранение
журналов данных и конфигурации.
Флэш-ПЗУ – Хранение образа микропрограммного обеспечения.
32-разрядный микропроцессор и операционная система
реального времени (RTOS) обеспечивают аппаратную и
программную защиту памяти.
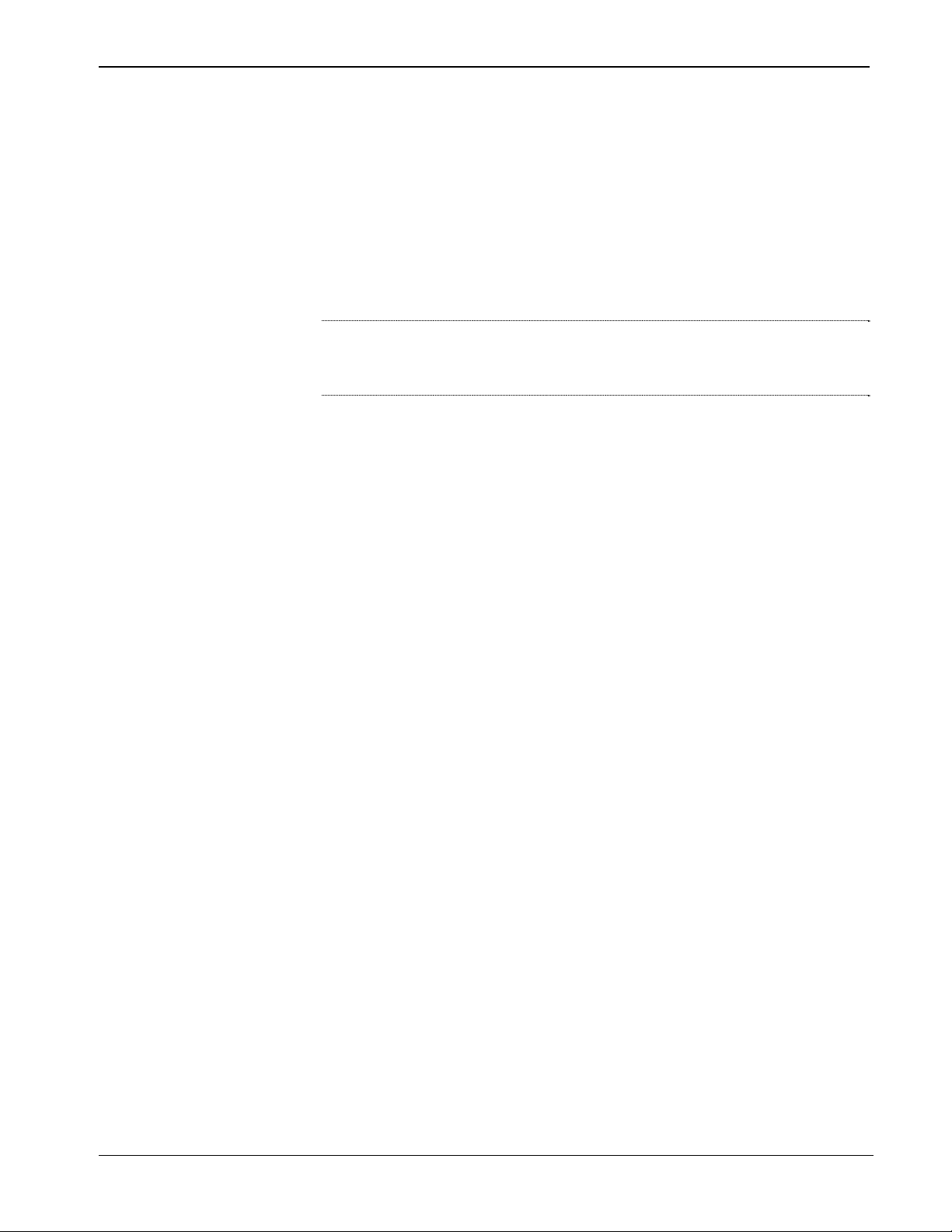
Дополнительный узел ввода/вывода CPU и устройства
согласования (см. рисунок 1-4).
1-8 Общие сведения Дата выпуска: февраль 2007 г.
Page 15

FloBoss 107. Руководство по эксплуатации
Рис. 1-4. CPU
1.3.5 Резервная память с батареей и суперконденсатором
Суперконденсатор и плоская батарея обеспечивают резервное
электропитание для статического ОЗУ и часов реального времени.
Это позволяет хранить краткосрочные и долгосрочные данные,
данные конфигурации и поддерживать работоспособность
контроллера FB107, если он находится в резерве или на хранении.
Более подробные сведения о замене батареи см. в разделе 2.5.1
"Снятие и установка батареи".
Примечание: замена суперконденсатора в условиях эксплуатации
не предусмотрена.
1.3.6 Встроенные входы и выходы
Встроенные в модуль CPU входы и выходы (I/O) включают 3 или
4-проводный входной интерфейс для 100 ом терморезистора (RTD)
и пять диагностических аналоговых входов (AI), предназначенных
для контроля следующих параметров:
Логическое напряжение.
Дата выпуска: февраль 2007 г. Общие сведения 1-9
Page 16
FloBoss 107. Руководство по эксплуатации
Напряжение батареи на разъеме подачи напряжения на заднюю
панель.
Напряжение зарядки с входа питания CPU.
Сила тока в миллиамперах со входа питания CPU.
Температура платы в месте установки CPU.
1.3.7 Встроенные порты передачи данных
Контроллер расхода FB107 поддерживает до четырех портов
передачи данных. Базовый блок CPU оборудован тремя
встроенными портами передачи данных:
Локальный интерфейс оператора (RS-232C) – LOI для
асинхронной последовательной передачи данных (Локальный
порт).
EIA-485 (RS-485) – COM1 для асинхронной последовательной
передачи данных.
EIA-232 (RS-232) – COM2 для последовательной передачи
данных.
Порт локального
интерфейса
оператора
Порт локального интерфейса оператора (LOI) предназначен для
прямой локальной связи контроллера расхода FB107 и
персонального компьютера (ПК) с помощью кабеля локального
интерфейса оператора с разъемом EIA-232 (RS-232C).
Локальный порт LOI обеспечивает доступ к контроллеру расхода
FB107 для выполнения его настройки и передачи сохраненных
данных. Порт LOI поддерживает создание сообщений аварийной
сигнализации по методу спонтанного сообщения о возникновении
исключительной ситуации (SRBX).
LOI — программно-настраиваемый интерфейс со скоростью
передачи от 300 до 115200 бит/с, используется разъем DB9.
Примечание: кабель LOI можно приобрести у местного торгового
представителя.
LOI поддерживает обмен данными по протоколам ROC или
Modbus. Интерфейс LOI также поддерживает защиту входа в
контроллер FB107, если защита LOI включена при помощи
ROCLINK 800.
Значения по умолчанию для порта LOI: скорость передачи 19200
бит/с, 8 битов данных, 1 стоповый бит, без контроля четности,
группа 1, адрес 2.
Последовательный
порт EIA-485 (RS-485)
COM1
Порт COM1 поддерживает последовательные протоколы связи
EIA-485 (RS-485) со скоростью передачи данных от 300 до 115200
бит/с. Порт COM1 обеспечивает стандартную дифференциальную
передачу данных на расстояние до 1220 метров.
1-10 Общие сведения Дата выпуска: февраль 2007 г.
Page 17

FloBoss 107. Руководство по эксплуатации
Драйверы EIA-485 (RS-485) предназначены для настоящих
многоточечных приложений с несколькими устройствами,
подключенными к одной шине.
Примечание: на блоке CPU порт COM1 помечен меткой 485.
Порт COM1 используется для дистанционного контроля или
изменения настроек контроллера расхода FB107 при помощи
сервера или программы ROCLINK 800. Интерфейс COM1 также
поддерживает защиту входа в контроллер FB107, если защита
COM1 включена при помощи ROCLINK 800.
Порт COM1 отправляет и принимает сообщения с использованием
основного и подчиненного протоколов ROC или Modbus. Порт
COM1 поддерживает создание сообщений аварийной сигнализации
по методу спонтанного сообщения о возникновении
исключительной ситуации (SRBX).
Значения по умолчанию для EIA-485 (RS-485): скорость передачи
19200 бит/с, 8 битов данных, 1 стоповый бит, без проверки
четности, задержка включения 10 мс, задержка отключения 10 мс.
Максимальная скорость передачи составляет 115,2 Кбит/с.
EIA-232 (RS-232),
последовательный
порт COM2
Порт COM2 поддерживает протоколы асинхронной
последовательной передачи данных EIA-232 (RS-232) со
скоростью передачи данных от 300 до 115200 бит/с и
последовательный интерфейс
. COM2 обеспечивает стандартную
асимметричную передачу данных на расстояние до 15 метров.
COM2 используется для дистанционного контроля или изменения
параметров FB107 при помощи ROCLINK 800. Интерфейс COM2
также поддерживает защиту входа в контроллер FB107, если
защита COM2 включена при помощи ROCLINK 800.
Порт COM2 отправляет и принимает сообщения с использованием
основного и подчиненного протоколов ROC или Modbus. Порт
COM2 поддерживает создание сообщений аварийной сигнализации
по методу спонтанного сообщения о возникновении
исключительной ситуации (SRBX).
Значения по умолчанию для коммуникационного модуля EIA-232
(RS-232): скорость передачи 19200 бит/с, 8 битов данных, 1
стоповый бит, без проверки четности, задержка включения 10 мс,
задержка отключения 10 мс. Максимальная скорость передачи
составляет 115,2 Кбит/с.
Дата выпуска: февраль 2007 г. Общие сведения 1-11
Page 18
FloBoss 107. Руководство по эксплуатации
Примечание: При установке в слот 2 коммуникационного
1.3.8 Встроенный терморезистор (RTD)
Контроллер расхода FB107 поддерживает прямой ввод данных с
терморезистора (RTD), предназначенного для измерения
температуры потока. Датчик температуры RTD, как правило,
монтируется в чехле термопары, установленной на контрольном
участке трубопровода. Диапазон измерений RTD — от −40 до
400°C (−40 - 752°F). Устройство RTD расположено в модуле CPU.
1.3.9 Встроенный выход "токовой петли"
модуля микропрограма перенаправляет порт
передачи данных (COM2) модуля CPU в
соответствии с типом модуля, установленного в
слоте 2. Настраивайте порт COM2 в соответствии с
типом коммуникационного модуля, установленного
в слоте 2.
Программа ROCLINK 800 позволяет сконфигурировать
дополнительный узел ввода/вывода модуля CPU для задания
значений напряжения "токовой петли" 10 или 24 В пост. тока.
Модуль ввода/вывода поддерживает только напряжение питания 24
В постоянного тока.
Примечание: узел ввода/вывода CPU использует разъемы
выходного электропитания и заземления модуля
CPU.
Выход "токовой петли" предназначен для устройств, которым
требуется электропитание 24 В постоянного тока с заземлением,
что позволяет передавать на контроллер расхода FB107 сигнал 4-20
мА от датчиков давления, температуры, уровня и т.п.
Выход "токовой петли" 10 В предназначен для маломощных
датчиков. Ток "петли", равный 80 мА, рассчитан на питание двух
внешних устройств, подключенных к двум аналоговым входам.
1.3.10 Дополнительные входы и выходы
Дополнительные входы/выходы (I/O) для контроллера расхода
FB107 представляют собой разъемы для приложений,
выполняющих расширенный контроль и управление.
Входы/выходы можно использовать для управления
пробоотборником или одоратором, для открытия клапанов или
контроля дополнительного аналогового входа.
Расширенный модуль ввода/вывода с 6 точками подключения
можно заказать в следующем исполнении:
1-12 Общие сведения Дата выпуска: февраль 2007 г.
Page 19
FloBoss 107. Руководство по эксплуатации
Узел ввода/вывода, установленный непосредственно на модуле
CPU (дополнительный узел ввода/вывода).
Модули ввода/вывода, устанавливаемые в слотах ввода/вывода.
Оба варианта исполнения имеют разъемы для шести точек
ввода/вывода и обеспечивают одинаковый выбор входов/выходов.
Пять из шести точек ввода/вывода можно настроить при помощи
ПО ROCLINK 800.
В число шести точек ввода/вывода входят:
Два аналоговых (AI) или дискретных входа (DI).
Один аналоговый (AO) или дискретный выход (DO).
Один дискретный выход (DO).
Два импульсных (PI) или дискретных входа (DI).
Можно добавить блок расширения к базовому блоку контроллера
FB107 и увеличить количество входов/выходов, добавив четыре
слота, что в сумме составит шесть слотов для модулей
ввода/вывода. Контроллер расхода FB107 поддерживает до шести
модулей ввода/вывода и один узел ввода/вывода на модуле CPU, то
есть до 42 точек ввода/вывода.
Модули ввода/вывода можно устанавливать в слоты 1-3 базового
блока контроллера FB107 и в слоты 4-6 в блоке расширения. Если в
слот 1 установлен коммуникационный модуль, модуль
ввода/вывода можно установить в слот 7.
Можно использовать токовые аналоговые входы 4-20 мА, если в
конфигурации AI, выполняемой при помощи ROCLINK 800,
выбрать резистор 250 Ом.
1.3.11 Дополнительный коммуникационный модуль – COM3
Дополнительный коммуникационный модуль позволяет принимать
и отправлять данные через порт COM3. Порт COM3 поддерживает
создание сообщений аварийной сигнализации по методу
спонтанного сообщения о возникновении исключительной
ситуации (SRBX).
Коммуникационные модули можно устанавливать в слоты 1 или 2
на базовом блоке контроллера. При установке коммуникационного
модуля в слот 1 базового блока контроллера активизируется порт
COM3. Если коммуникационный модуль установить в слот 2,
выполняется перенаправление порта передачи данных модуля CPU
(COM2) в соответствии с типом модуля, установленного в слоте 2.
Дата выпуска: февраль 2007 г. Общие сведения 1-13
Page 20

FloBoss 107. Руководство по эксплуатации
Контроллер расхода FB107 поддерживает следующие типы
коммуникационных модулей:
Последовательный протокол связи EIA-485 (RS-485) со
скоростью передачи данных от 300 до 115200 бит/с,
обеспечивающий стандартную дифференциальную передачу
данных на расстояние до 1220 метров.
Последовательный протокол связи EIA-232 (RS-232) со
скоростью передачи данных от 300 до 115200 бит/с и
последовательным интерфейсом, обеспечивающий
стандартную асимметричную передачу данных на расстояние
до 15 метров.
Порт COM3 позволяет обмениваться данными с другими
устройствами при помощи основного или подчиненного протокола
ROC или Modbus. Микропрограмма автоматически определяет
подчиненные протоколы ROC и Modbus.
1.3.12 Дополнительный модуль многопараметрического сенсора (MVS)
Дополнительный модуль многопараметрического сенсора (MVS)
обеспечивает передачу данных о перепаде давления, статическом
давлении и температуре на контроллер FB107. Эти данные
необходимы для вычисления расхода по перепаду давления.
В контроллер расхода FB107 можно установить только один
модуль MVS. Модуль MVS можно установить в слоты 1-3 на
базовом блоке или в слоты 4-7 блока расширения независимо от
расположения модулей другого типа.
Модуль MVS предоставляет сигнал с ограничением по току и
обеспечивает обмен данными по интерфейсу EIA-485 (RS-485) с
многопараметрическими сенсорами удаленного монтажа.
Контроллер расхода FB107 поддерживает шесть сенсоров
удаленного монтажа, которые размещены не более чем в четырех
контрольных участках трубопровода.
1.3.13 Дополнительный лицензионный ключ
Дополнительный лицензионный ключ приложения позволяет
использовать расширенные функции, например различные
пользовательские программы. Контроллер расхода FB107
поддерживает до шести пользовательских программ. Например,
для выполнения программ User C в контроллере FB107 необходимо
установить соответствующую лицензию.
1-14 Общие сведения Дата выпуска: февраль 2007 г.
Page 21
1.4 Микропрограммное обеспечение
Микропрограммное обеспечение при помощи программы
ROCLINK 800 позволяет задавать различные параметры
конфигурации контроллера расхода. Микропрограммное
обеспечение, записанное во флэш-ПЗУ, определяет набор функций
контроллера FB107.
Микропрограммное обеспечение содержит операционную систему
для контроллера FB107, его можно обновлять по месту установки с
помощью подключения к последовательному интерфейсу,
например через порт LOI.
Состав микропрограммного обеспечения:
База данных входов и выходов.
База данных архивов.
База данных журнала событий и аварийной сигнализации.
Приложения, например PID, AGA и FST.
Часы реального времени.
Определение выполнения задач.
Вычисление расхода по методу 1992 AGA-3 (значения
сжимаемости AGA8 Detail, Gross 1 или Gross 2 задаются
пользователем).
Вычисление расхода 1996 AGA-7 (значение сжимаемости по
методу AGA8 задается пользователем).
Вычисление расхода по ISO5167-2003.
Основной или подчиненный протокол ROC или Modbus (ASCII
или RTU).
Регистрация в памяти 240 аварийных сигналов и 240 событий.
Установление связи и управление обменом данными.
Обмен данными на основе протокола ROC или основного или
подчиненного протокола Modbus (ASCII или RTU) для работы с
приложениями EFM.
Аварийный вызов на сервер по методу спонтанного сообщения
о возникновении исключительной ситуации (SRBX).
Стандартный и дополнительный архивы.
Функция самотестирования.
Защита на пользовательском уровне.
Контроллер FB107 содержит функции, необходимые для
различных областей применения. Конструкция контроллера
расхода FB107 допускает возможность расширения, контроллер
предназначен для дистанционного контроля, измерения и
управления оборудованием.
FloBoss 107. Руководство по эксплуатации
Дата выпуска: февраль 2007 г. Общие сведения 1-15
Page 22

FloBoss 107. Руководство по эксплуатации
Назначение контроллера расхода FB107:
Области применения, где требуется вычисление расхода.
Логическое и последовательное управление при помощи
заданной пользователем таблицы функциональных
последовательностей (FST).
Функции управления с применением автоматической обратной
связи (PID) (требуется дополнительный модуль ввода/вывода
или узел ввода/вывода модуля CPU).
Поддержка специализированных приложений User C.
Операционная
система реального
времени (RTOS)
Микропрограммное обеспечение контроллера FB107 использует
вытесняющую многозадачную операционную систему реального
времени (RTOS), основанную на сообщениях. Задачам
назначаются приоритеты. Это позволяет операционной системе в
любое время определить, какая задача должна выполняться.
Например, если выполняется задача с низким приоритетом и
требуется запустить задачу с высоким приоритетом, операционная
система приостанавливает выполнение задачи с низким
приоритетом и запускает задачу с высоким приоритетом. После
завершения этой задачи возобновляется выполнение задачи с
низким приоритетом.
TLP
Контроллер расхода FB107 считывает и записывает данные в
структуры данных, называемые "точками". "Точка" представляет
собой термин протокола ROC, позволяющий группировать
отдельные параметры (например информация о канале
ввода/вывода) или другие функции (например вычисление
расхода). Точки определяются набором параметров, для
определения типа точки используются цифровые обозначения.
Логический номер указывает физическое расположение
входа/выхода или логический экземпляр для точек, не
выполняющих функции ввода/вывода в контроллере FB107.
Параметры представляют собой отдельные данные, связанные с
типом точки. Атрибуты типа точки определяют точку базы данных
как один из возможных типов точек, доступных в системе.
Примером TLP может служить аналоговый вход (T),
местоположение блока B1 (L) и инженерные единицы измерения
(P).
Вместе эти три компонента: тип (T), логическое значение (L) и
параметры (P) определяют конкретные данные в базе данных
контроллера FB107. Обычно такой трехкомпонентный адрес
называют TLP.
1-16 Общие сведения Дата выпуска: февраль 2007 г.
Page 23

1.4.1 Архивные точки
Контроллер FB107 сохраняет архив в одной из двух баз данных:
стандартном или дополнительном архиве. Можно настроить
количество доступных записей для стандартного архива (максимум
100) и для дополнительного архива (максимум 25). Архив для
контрольного участка трубопровода включает методы усреднения,
а также сбор данных ежесекундно и ежеминутно.
Можно определить количество точек для занесения в архив,
интервал выборки в минутах (для дополнительного или
стандартного архива) или в секундах (только для дополнительного
архива), количество суток, в течение которых выполняется
архивирование, и способ добавления архивных данных: в конец
или в начало архива.
Архив представляет собой один блок памяти, разделенный на две
области: одна для стандартного архива, другая — для
дополнительного. Стандартный архив использует всю память,
необходимую для заданного количества точек. Для
дополнительного архива выделяется память, не используемая
стандартным архивом.
FloBoss 107. Руководство по эксплуатации
Архивный журнал
данных за
минуту
Стандартный архив имеет следующие свойства:
До 100 точек данных за минуту за последние 60 минут.
До 100 точек данных за час на 35 суток.
До 100 точек данных за сутки на 35 или 60 суток.
Мин. / макс. значение в архиве за сегодняшние и вчерашние
сутки.
Дополнительный архив предоставляет для контроллера FB107
средства контроля, аналогичные регистрирующему устройству.
Можно настроить дополнительный архив для регистрации до 25
архивных точек с интервалом 1, 2, 3, 4, 5, 10, 12, 15, 20, 30 или 60
секунд либо минут.
В контроллере FB107 имеется архивный журнал на 60 минут для
каждой архивной точки. В архивном журнале данных за минуту
хранятся данные за последние 60 минут. Записи в архивном
журнале за минуту имеются для каждой архивной точки, если
только архивная точка не настроена для регистрации под
управлением таблицы FST.
Дата выпуска: февраль 2007 г. Общие сведения 1-17
Page 24

FloBoss 107. Руководство по эксплуатации
Архивный журнал
данных за
час
Архивный журнал за
сутки
Архивный журнал
мин. / макс. значений
Дополнительный
архивный журнал
В контроллере FB107 для каждой архивной точки имеется журнал
архивных данных за час на 35 суток. Архивный журнал данных за
час также называют периодической базой данных. Как правило,
запись в часовом журнале выполняется в начале каждого часа;
имеется возможность настроить запись на начало или конец
каждого часа. Исключение составляют режимы регистрации FST
Minute и FST Second.
Формат метки времени для периодической регистрации включает
месяц, день, час и минуты. Исключением является режим
регистрации FST Second, метка времени в котором включает день,
час, минуты и секунды.
В контроллере FB107 для каждой архивной точки имеются
архивные журналы данных за 35 или 60 суток. Записи в журнал
данных за сутки выполняются ежедневно через каждый час с
меткой времени, соответствующей журналу за час. Записи в
архивном журнале за сутки имеются для каждой архивной точки,
если только архивная точка не настроена для регистрации под
управлением таблицы FST.
База данных макс./мин. значений содержит максимальные и
минимальные значения для точек базы данных за текущие или
предшествующие 24 часа. Архивные максимальное и
минимальное значения можно только просмотреть, сохранить их
на диске невозможно.
Контроллер FB107 позволяет настраивать время архивирования,
что, в свою очередь, определяет количество записей в архиве.
Можно настроить дополнительный архив для регистрации до 25
архивных точек с интервалом 1, 2, 3, 4, 5, 10, 12, 15, 20, 30 или 60
секунд либо минут.
1-18 Общие сведения Дата выпуска: февраль 2007 г.
Page 25

FloBoss 107. Руководство по эксплуатации
1.4.2 Журнал аварийной сигнализации
В журнале аварийной сигнализации содержатся данные об
изменении состояния любого аварийного сигнала, включенного в
аварийную сигнализацию. В системном журнале аварийной
сигнализации может храниться до 240 аварийных сигналов в
"кольцевом" режиме. Журнал аварийной сигнализации содержит
поля данных метки времени и даты, индикатор сброса или задания
аварийного сигнала и имя тега точки или 14-байтную строку
сведений в формате ASCII.
В дополнение к функциям добавления к журналу новых аварийных
сообщений журнал аварийной сигнализации позволяет основным
пакетам запрашивать индекс последних зарегистрированных
записей аварийной сигнализации. Регистрация аварийных сигналов
доступна для самой системы, для внешних приложений и для
таблиц FST.
Примечание: ROCLINK 800 не сохраняет журналы аварийной
сигнализации во флэш-ПЗУ при выборе функции
Save Configuration (Сохранить конфигурацию).
Журнал аварийной сигнализации работает в кольцевом режиме, то
есть при заполнении буфера новые записи заменяют самые старые.
Журнал аварийной сигнализации позволяет отслеживать архив
последних аварийных сигналов. Система сохраняет журнал
аварийной сигнализации отдельно от журнала событий. Это
делается для предотвращения перезаписи повторными аварийными
сигналами данных конфигурации аудита.
1.4.3 Журнал событий
Журнал событий содержит данные об изменениях всех параметров
FB107, выполненных через протокол связи. Журнал событий также
содержит данные о других событиях контроллера FB107, например
включении и выключении питания, начальной загрузке и загрузках
дисковых конфигураций. Журнал событий позволяет отслеживать
архив последних операций и изменений. В журнале событий
имеются поля данных о типе точек, количестве параметров, метках
даты и времени, количестве точек (если применяется),
идентификации оператора, предыдущих или текущих значениях
параметров и содержат имя тега точки или 14-байтную строку
сведений в формате ASCII.
Дата выпуска: февраль 2007 г. Общие сведения 1-19
Page 26
FloBoss 107. Руководство по эксплуатации
В системном журнале событий может храниться до 240 событий в
"кольцевом" режиме. Журнал событий работает в кольцевом
режиме, то есть при заполнении буфера новые записи заменяют
самые старые. Журнал событий обеспечивает ведение
контрольного журнала последних операций и изменений. Система
сохраняет журнал событий отдельно от журнала аварийной
сигнализации. Это делается для предотвращения перезаписи
повторными аварийными сигналами данных конфигурации аудита.
В дополнение к функциям добавления новых событий журнал
позволяет внешним приложениям запрашивать индекс последних
зарегистрированных записей событий. Регистрация событий
доступна для самой системы, для внешних приложений и для
таблицы FST.
Примечание: ROCLINK 800 не сохраняет журналы событий во
Контроллер расхода FB107 позволяет ограничивать события,
связанные с вычислением AGA, и регистрировать только важные
события. Если в поле Limit Meter Events (Ограничить ко-во
событий) на вкладке Meter Setup’s Advanced (Дополнительные
настройки измерений) (Meter > Setup) (Измерения > Настройка)
выбрать Enabled (Включено), система не будет записывать в
журнал незначительные события. События, не регистрируемые в
журнале, включают значения температуры, давления, число
Рейнольдса и предупреждения о диаметре диафрагмы, диаметре
трубы и бета-отношении.
флэш-ПЗУ при выборе функции Save Configuration
(Сохранить конфигурацию).
1.4.4 Защита
Контроллер FB107 поддерживает защиту на уровне устройства.
Можно определить и сохранить максимум 16 идентификаторов
входа в систему (ID). Для возможности обмена данными с блоком
идентификатор входа в систему программы ROCLINK 800 должен
соответствовать одному из идентификаторов, хранящихся в
контроллере FB107. Эта функция защиты включена по умолчанию
для порта локального интерфейса оператора (Защита LOI). Можно
настроить защиту для портов COM1, COM2 и COM3. По
умолчанию защита этих портов отключена.
1-20 Общие сведения Дата выпуска: февраль 2007 г.
Page 27
FloBoss 107. Руководство по эксплуатации
1.4.5 База данных ввода/вывода
В базе данных ввода/вывода содержатся сведения о точках
ввода/вывода, поддерживаемых операционной системой
микропрограммного обеспечения, включая системные аналоговые
входы и переменные, значения модуля многопараметрического
сенсора (MVS), коммуникационных модулей и модулей
интеллектуальных приложений. Микропрограмма автоматически
определяет тип точки и расположение точек на каждом
установленном модуле. Затем микропрограмма назначает входы и
выходы точке в базе данных и добавляет пользовательские
параметры конфигурации для задания значений, состояний или
идентификаторов. Микропрограмма сканирует каждый вход,
размещая значения в соответствующие точки базы данных. Эти
значения доступны для отображения и архивации.
1.4.6 Таблицы функциональных последовательностей (FST)
Контроллер расхода FB107 поддерживает программирование
таблиц FST. Можно создать четыре FST-программы максимальной
длиной 3000 байт каждая. Задайте в программе ROCLINK 800
количество строк FST на исполнительный цикл.
Код FST хранится в статическом ОЗУ и резервируется во флэшпамяти при вызове функции Save Configuration (Сохранить
конфигурацию) в программе ROCLINK 800.
Примечание: чтобы сделать таблицы доступными, их необходимо
1.4.7 PID Control
Прикладные программы PID Control, поставляемые с
микропрограммным обеспечением контроллера FB107,
поддерживают функции пропорционально-интегральнодифференциального (ПИД) регулирования в замкнутом контуре
для обеспечения стабильного функционирования контура обратной
связи, в состав которого входит регулирующее устройство,
например, регулирующий клапан. Контроллер FB107
поддерживает восемь контуров ПИД-регулирования, для
обеспечения которых требуется установка дополнительного узла
ввода/вывода CPU или модуля ввода/вывода.
сначала включить (Configure > Control > FST
Registers) (Конфигурирование - Управление Регистры FST).
Микропрограмма настраивает в контроллере FB107 независимый
ПИД-алгоритм (контур). ПИД-контур имеет собственный вход,
заданный пользователем, выход и возможность переключения.
Дата выпуска: февраль 2007 г. Общие сведения 1-21
Page 28
FloBoss 107. Руководство по эксплуатации
Контур ПИД-регулирования поддерживает заданное значение
переменной процесса. Если сконфигурировано переключение
ПИД-регулирования, регулирующим устройством в обычном
режиме управляет основной контур. Если изменение сигнала на
выходе (задается пользователем) основного контура становится
меньше или больше изменения, рассчитанного для
дополнительного (корректирующего) контура, управление
регулирующим устройством передается на корректирующий
контур. Типичным примером является регулирование расхода с
помощью корректирующего контура давления.
Примечание: чтобы сделать доступными ПИД-контуры
1.4.8 Аварийная сигнализация по методу спонтанного сообщения о возникновении исключительной ситуации (SRBX)
регулирования, сначала необходимо включить их
(ROC > Information) (ROC - Информация).
При помощи функции SRBX можно задать порт передачи данных,
позволяющий контроллеру расхода FB107 обмениваться данными с
основным компьютером при возникновении заданных условий
аварийного сигнала. Для конфигурирования аварийной
сигнализации SRBX для каждого порта передачи данных
необходимо включить параметр SRBX, для каждой точки —
параметр аварийной сигнализации, а также необходимо выбрать
для точек параметр SRBX. Этот параметр может принимать
значения SRBX on Set (SRBX при задании), SRBX on Clear (SRBX
при сбросе) или SRBX on Set & Clear (SRBX при задании и сбросе).
Сигналы SRBX передаются по последовательному каналу, если
сервер настроен для приема вызовов от периферийных устройств.
1.4.9 Программные точки
Программные точки представляют собой области хранилища
глобальных данных, которые может использовать любое
приложение контроллера FB107. Например, в программной точке
могут храниться результаты заданного FST-вычисления или
промежуточный результат для заданного значения, которые
используются при выполнении FST или пользовательской
программы. Программные точки состоят из идентификатора тега,
одного целого значения и двадцати значений с плавающей запятой.
Тридцать две программные точки обеспечивают хранение для 704
переменных.
1-22 Общие сведения Дата выпуска: февраль 2007 г.
Page 29
FloBoss 107. Руководство по эксплуатации
1.4.10 Коды Opcode
Используйте Opcode Table (Таблица кодов Opcode) для
группировки запрашиваемых данных, что обеспечивает более
эффективный обмен данными. Точке данных таблицы кодов
Opcode можно назначить параметры из различных типов точек, что
позволяет значительно сократить количество обращений к
управляющему компьютеру. Контроллер FB107 поддерживает
восемь таблиц кодов Opcode, в каждой из которых имеется 44
значения.
1.4.11 Транзитная передача данных
Используя порты передачи данных контроллера FB107, режим
транзитной передачи данных позволяет одному блоку принимать
данные, а затем передавать их на другие устройства,
подсоединенные к любому другому порту передачи данных.
Например, основной компьютер обменивается данными по
радиоканалу с контроллером FB107 через порт COM2. Затем
можно подключить другие контроллеры FB107 через интерфейс
EIA-485 (RS-485) к порту COM1 первого контроллера FB107, при
этом все контроллеры FB107 могут использовать для связи с
управляющим компьютером один радиоканал.
Примечание: Группа устройств контроллера FB107,
принимающего данные, должна соответствовать
группе устройств контроллеров FB107, которым
передаются данные. Группа устройств расположена
на информационной странице (ROC > Information)
(ROC - Информация).
1.4.12 Протоколы ROC и Modbus
Контроллер FB107 может обмениваться данными с другими
устройствами по протоколам ROC или Modbus. Микропрограмма
может автоматически определять эти два протокола (ROC или
Modbus) со скоростями передачи данных до 115, 2 Кбит/с.
Протокол ROC поддерживает последовательную передачу данных
на локальные или удаленные устройства, например на
управляющий компьютер.
Контроллер расхода FB107 может выступать в качестве ведущего
или ведомого устройства Modbus и использовать режим
удаленного терминала (RTU) или формат Американского
стандартного кода для обмена данными (ASCII). Благодаря этому
контроллер FB107 можно легко интегрировать в другие системы.
Расширения протокола Modbus позволяют передавать данные
архивов, журнала событий и журнала аварийных сообщений в
приложения электронного измерения расхода (EFM).
Дата выпуска: февраль 2007 г. Общие сведения 1-23
Page 30

FloBoss 107. Руководство по эксплуатации
Примечания:
Порт LOI поддерживает только подчиненные протоколы ROC
или Modbus.
Контроллер FB107 автоматически определяет сообщения
подчиненных протоколов ROC или Modbus на всех
коммуникационных портах. Для включения на отдельном порту
основного ведущего протокола Modbus необходимо в качестве
владельца порта выбрать ведущее устройство Modbus. В
качестве ведущего устройства Modbus коммуникационный порт
не поддерживает сообщения протокола ROC.
1.4.13 Программы на языке User C
Специализированные прикладные программы User C, которые
заказываются дополнительно, расширяют функциональные
возможности микропрограммного обеспечения контроллера FB107,
добавляя такие функции и возможности, как расчет параметров
пара и пользовательские коммуникационные драйверы. Примеры
специализированных программ на языке User C:
Вычисление расхода.
Расчет свойств.
Программы передачи данных.
Специальные приложения.
Передавать лицензии для программ User C на контроллер FB107
можно с помощью функции License Key Administrator
(Администратор лицензионных ключей) (Utilities > License Key
Administrator) (Утилиты - Администратор лицензионных ключей)
программы ROCLINK 800.
1.5 Конфигурационное программное обеспечение ROCLINK 800
Конфигурационное программное обеспечение ROCLINK 800
представляет собой программу, работающую на компьютере под
управлением Microsoft
состояние контроллера расхода FB107, а также выполнять
операции конфигурирования и калибровки.
В автономном режиме программы ROCLINK 800 доступны
диалоговые окна конфигурации для измерительных приборов,
входов/выходов и PID. Это позволяет конфигурировать систему во
время эксплуатации контроллера FB107 или в автономном режиме.
®
Windows® и позволяющую отслеживать
1-24 Общие сведения Дата выпуска: февраль 2007 г.
Page 31

FloBoss 107. Руководство по эксплуатации
Локальный интерфейс оператора (локальный порт LOI)
обеспечивает прямое соединение контроллера FB107 и ПК. Порт
LOI использует разъем DB9 со стандартной разводкой контактов
EIA-232 (RS-232C). С помощью персонального компьютера, на
котором выполняется программа ROCLINK 800, можно локально
конфигурировать контроллер FB107, извлекать данные и
контролировать работу устройства.
Удаленное конфигурирование выполняется с управляющего
компьютера по последовательному каналу передачи данных.
Конфигурации можно дублировать и сохранять на диске. Помимо
создания резервной копии эта функция полезна при одинаковом
начальном конфигурировании нескольких контроллеров расхода
FB107 или при необходимости изменить конфигурацию в
автономном режиме. После создания резервного файла
конфигурации его можно загрузить в контроллер FB107 с
помощью функции загрузки (File > Download) (Файл - Загрузить).
Доступ к контроллеру FB107 имеют только авторизованные
пользователи после ввода правильного идентификатора
пользователя и пароля.
В программе ROCLINK 800 можно создать пользовательские
диалоговые окна для контроллера FB107, объединяющие
графические и динамические элементы данных. Диалоговые окна
позволяют контролировать работу контроллера FB107 локально
или удаленно.
Можно сохранить в архиве значения любых цифровых параметров
контроллера FB107. Для каждого параметра, сконфигурированного
для сохранения в архиве, система сохраняет метку времени
значений за минуту, за период и за сутки, а также минимальное и
максимальное значения за текущие и предыдущие сутки.
Просмотреть архивные значения на контроллере FB107 можно при
помощи программы ROCLINK 800 или управляющей системы
сторонних поставщиков. Можно просмотреть архив
непосредственно с контроллера FB107 или предварительно
сохранить его в виде файла на диске. Для каждого сегмента архива
можно сконфигурировать количество периодических значений для
сохранения в архиве, частоту сохранения периодических значений,
количество архивируемых значений за сутки и заданный час.
ПО ROCLINK 800 может создавать файл отчета EFM (электронное
измерение расхода), который содержит все журналы конфигурации,
аварийных сигналов, событий, периодических и ежесуточных
архивных журналов, связанных с участками измерения
контроллера FB107. Затем этот файл используется в качестве
контрольного журнала перекачки.
Дата выпуска: февраль 2007 г. Общие сведения 1-25
Page 32

FloBoss 107. Руководство по эксплуатации
ПО ROCLINK 800 используется в следующих целях:
Конфигурирование и просмотр точек ввода/вывода (I/O),
вычислений расхода, контрольных участков трубопровода,
контуров ПИД-регулирования, задание системных параметров,
а также функции управления электропитанием.
Получение, сохранение и создание отчетов по архивным
данным.
Получение, сохранение и создание отчетов о событиях и
аварийных сигналах.
Выполнение двух-, трех-, четырех- и пятиточечной
калибровки аналоговых входов и входов
многопараметрического сенсора (MVS).
Выполнение двух-, трех-, четырех- и пятиточечной калибровки
входов модуля RTD.
Обеспечение защиты пользователей.
Создание, сохранение и редактирование диалоговых окон.
Создание, сохранение, редактирование и отладка таблиц
функциональных последовательностей (FST) длиной до 3000
байт.
Настройка параметров передачи данных.
Конфигурирование параметров Modbus.
Обновление микропрограммного обеспечения.
1.6 Электронные компоненты изделия
В этом разделе описаны электронные компоненты контроллера
расхода FB107.
1.6.1 Часы реального времени
Часы реального времени предоставляют контроллеру FB107
данные о времени дня, месяце, годе и дне недели, а также
позволяют добавлять метки реального времени к значениям в базе
данных. При отключении основного электропитания контроллера
FB107 часы реального времени автоматически переключаются на
резервное электропитание. Резервное электропитание для часов
реального времени рассчитано на период более одного года (при
отключении контроллера FB107 от сети электропитания).
Встроенный суперконденсатор обеспечивает резервирование
данных и часов реального времени при отключении основного
электропитания. Минимальный срок службы суперконденсатора с
установленной батареей и при отключенном основном
электропитании контроллера FB107 составляет не менее одного
года.
1-26 Общие сведения Дата выпуска: февраль 2007 г.
Page 33

Примечание: часы реального времени используют
суперконденсатор для сохранения текущего времени
при замене литиевой батареи.
1.6.2 Диагностический контроль
На плате электроники имеется пять встроенных диагностических
входов, предназначенных для контроля целостности системы.
Доступ к этим аналоговым входам выполняется с помощью
функции ввода/вывода программы ROCLINK 800 (Configure > I/O)
(Конфигурирование - Ввод/вывод). См. Таблица 1-1.
Таблица 1-1. Системные аналоговые входы
Номер точки
системного
аналогового
входа
E1 Логическое
E2 Напряжение
E3 Напряжение
E4 Ток системы в
E5 Температура
Функция Точка получения
напряжение
батареи
зарядки
миллиамперах
платы
FloBoss 107. Руководство по эксплуатации
Нормальный
диапазон
CPU 3,0 - 3,6
Разъем P1 входного
напряжения задней
панели
Вход
электропитания
модуля CPU
Вход
электропитания
модуля CPU
CPU
11,25 - 16 В пост. тока
8 - 30 В пост. тока
0 - 18 В пост. тока
8 - 30 В пост. тока
от –40 до 85°C (от –40 до
185°F)
Более подробные сведения о конфигурировании аварийных
сигналов и точек системных аналоговых входов см. в главе 7
документа ROCLINK 800, Руководство пользователя
конфигурационного программного обеспечения (для FloBoss 107)
(Форма A6217).
1.6.3 Автоматическое самотестирование
Контроллер FB107 включается при подаче на вход электропитания
правильной полярности и подаче на разъем PWR+ / PWR
напряжения запуска (как правило, более 8,0 В) − (предполагается,
что предохранитель цепи электропитания/защита исправны).
Проверка напряжения батареи и логического напряжения служит
для подтверждения работы контроллера расхода FB107 в
оптимальном режиме.
Программа активизирует контрольный таймер для каждого
интервала сканирования. Если таймер не включается в течение 6
секунд, программа автоматически сбрасывается.
Дата выпуска: февраль 2007 г. Общие сведения 1-27
Page 34

FloBoss 107. Руководство по эксплуатации
1.6.4 Режим малого потребления энергии
В предварительно заданных условиях контроллер расхода FB107
переходит в режим ожидания для экономии потребления
электроэнергии.
В режиме ожидания отключается электропитание модуля CPU,
хотя данные ввода/вывода продолжают накапливаться. Контроллер
расхода FB107 переходит в режим ожидания через одну минуту
бездействия на коммуникационных портах. Режим ожидания
можно отключить, в этом случае контроллер расхода FB107
постоянно находится в рабочем режиме. Настройте этот параметр
(по умолчанию Disabled (Отключен)) в поле Sleep Mode (Режим
ожидания) на вкладке модуля CPU Advanced (Дополнительно).
Контроллер расхода FB107 выходит из режима ожидания при
получении следующих сигналов:
Временного прерывания от часов реального времени.
Сигнала на одном из коммуникационных портов.
1.7 Измерения расхода
Используются следующие методы расчета для газа и жидкости:
Соответствующие требованиям AGA и API, глава 21, для AGA
линейных и дифференциальных типов измерительных приборов.
AGA3 – Дифференциальный метод для газа.
AGA7 – Импульсный метод (ISO 9951) для газа.
AGA8 – Сжимаемость для методов Detailed (ISO 12213-2), Gross
I (ISO 12213-3) и Gross II для газа.
ISO 5167 – Дифференциальный.
Микропрограмма FB107 выполняет ежесекундно полный расчет на
сконфигурированном контрольном участке трубопровода (до
четырех участков) по методам AGA3, AGA7, AGA8 и ISO 5167.
Примечание: для подключения дополнительных контрольных
участков трубопровода необходимо включить
контрольные участки трубопровода и задать их
количество (ROC > Information > Device
Information screen > Points tab, AGAs field) (ROC -
Информация - Информация об устройстве - вкладка
"Точки", поле AGAs). Для оптимизации системы
можно отключить неиспользуемые контрольные
участки трубопроводов или контуры ПИД.
Основное назначение контроллера расхода FB107 заключается в
измерении расхода в соответствии со стандартами 1992
Американского нефтяного института (API), Международной
организации по стандартам (ISO) и Американской газовой
ассоциации (AGA).
1-28 Общие сведения Дата выпуска: февраль 2007 г.
Page 35

FloBoss 107. Руководство по эксплуатации
Основные входы для функции измерения расхода AGA3 —
перепад давлений, статическое давление и температура. Измерения
на входах перепада и статического давления выполняются
ежесекундно. На входе температуры измерение и линеаризация
выполняются один раз в секунду, данные поступают с пробника
модуля RTD.
Вычисления AGA3 соответствуют методам, описанным в отчете №
3 Американской газовой ассоциации: "Измерение расхода
природного газа и других углеводородных сред с помощью
диафрагм". На основе второй и третьей редакции используется
метод расчета 1992 AGA3.
Основные входы измерения расхода по методу AGA7 — отсчеты
импульсных входов (PI), статическое давление и температура.
Отсчеты импульсных входов подаются с роторного счетчика,
турбинного расходомера или с других измерительных приборов,
генерирующих импульсы. Данные на входы статического давления
поступают с датчиков давления, данные на вход температуры
подаются с датчика RTD.
Вычисления AGA7 соответствуют методам, описанным в отчете №
7 Американской газовой ассоциации: "Измерение расхода газа с
помощью турбинных расходомеров и применение метода AGA8
для определения коэффициента сжимаемости".
Микропрограмма ISO5167-2003 вычисляет расход газа. Измерение
расхода жидкости выполняется с помощью устройств перепада
давления, установленных в поперечном сечении трубы.
Метод AGA8 определяет коэффициент сжимаемости на основе
физико-химических свойств компонентов газа при заданной
температуре и давлении.
Дата выпуска: февраль 2007 г. Общие сведения 1-29
Page 36

FloBoss 107. Руководство по эксплуатации
1.8 Дополнительные сведения
Дополнительные сведения см. в следующих документах:
Таблица 1-2. Дополнительные сведения
Название Форма Номер детали
ROCLINK 800, Руководство пользователя конфигурационного
программного обеспечения (для FloBoss 107)
Контроллер расхода FloBoss 107 с блоком расширения 5:FB107 D301233X012
Микропрограммное обеспечение FloBoss 107 5.2:FW1 D301235X012
Входы и выходы (I/O) контроллера FloBoss 107 5.3:IO1 D301236X012
Коммуникационные модули контроллера расхода FloBoss 107 5.3:COM D301237X012
Модуль многопараметрического сенсора (MVS) контроллера
расхода FloBoss 107
Примечание: последние версии спецификаций доступны по адресу
www.EmersonProcess.com/Flow.
A6217 D301249X012
5.3:MVS D301239X012
1-30 Общие сведения Дата выпуска: февраль 2007 г.
Page 37

FloBoss 107. Руководство по эксплуатации
Глава 2 – Установка и эксплуатация
В этой главе содержатся общие указания по установке и
эксплуатации контроллера расхода FB107.
Содержание
2.1 Требования к установке ................................................................... 2-1
2.1.1 Требования к окружающей среде.......................................2-2
2.1.2 Требования к рабочей площадке .......................................2-2
2.1.3 Соответствие стандартам для опасных зон ......................2-4
2.2 Требования по электропитанию ......................................................2-5
2.3 Требования по заземлению .............................................................2-6
2.3.1 Установка заземления контроллера
расхода FloBoss 107 ............................................................2-7
2.3.2 Требования по подключению входов/выходов ................. 2-8
2.4 Монтаж контроллера FloBoss 107 и блока расширения................ 2-8
2.4.1 Необходимые инструменты ................................................ 2-8
2.4.2 Монтаж контроллера расхода FloBoss 107 без
блока расширения ............................................................... 2-9
2.4.3 Монтаж контроллера расхода FloBoss с блоком
расширения ........................................................................2-10
2.4.4 Демонтаж блока расширения ........................................... 2-12
2.4.5 Снятие и установка крышек слотов для модулей........... 2-13
2.4.6 Установка и снятие крышек проводных каналов ............2-13
2.5 Резервная батарея ЗУ ....................................................................2-14
2.5.1 Удаление и установка батареи......................................... 2-15
2.6 Центральный процессор (CPU) .....................................................2-15
2.6.1 Снятие модуля CPU...........................................................2-16
2.6.2 Установка модуля CPU...................................................... 2-17
2.7 Лицензионные ключи...................................................................... 2-18
2.8 Включение и эксплуатация ............................................................ 2-18
2.8.1 Включение ..........................................................................2-19
2.8.2 Эксплуатация ..................................................................... 2-19
2.1 Требования к установке
Предварительное планирование помогает выполнить установку
легко и эффективно. На этапе планирования необходимо
рассмотреть вопросы размещения и заземления, климатические
условия эксплуатации, доступность места установки, а также
возможность использования приложений контроллера расхода
FB107.
Универсальность контроллера FB107 позволяет применять его в
установках различных типов. Дополнительные сведения по
определенным вариантам установки можно получить у
регионального торгового представителя.
Дата выпуска: февраль 2007 г. Установка и эксплуатация 2-1
Page 38

FloBoss 107. Руководство по эксплуатации
2.1.1 Требования к окружающей среде
Убедитесь, что корпус контроллера расхода FB107 предоставляет
уровень защиты, необходимый для эксплуатации устройства в
различных погодных условиях.
Конструкция контроллера расхода FB107 рассчитана на его
эксплуатацию в широком диапазоне температур. Однако в крайне
тяжелых климатических условиях может возникнуть
необходимость обеспечить умеренную температуру эксплуатации
контроллера FB107.
Примечание: в средах с солевым туманом особенно важно
Контроллер расхода FB107 разработан с учетом эксплуатации в
диапазоне температур от −40 до 75°C (−от 40 до 167°F). При
монтаже контроллера следует учесть наличие в непосредственной
близости устройств, способных влиять на изменение рабочей
температуры. Эксплуатация вне рекомендованного диапазона
температур может привести к возникновению ошибок и
значительному ухудшению производительности. Продолжительная
эксплуатация в тяжелых условиях также может привести к выходу
устройства из строя.
обеспечить полную герметизацию корпуса, включая
все точки вводов и выводов.
Контроллер расхода FB107 рассчитан на эксплуатацию при
относительной влажности не более 90% без образования
конденсата.
2.1.2 Требования к рабочей площадке
Тщательный выбор местоположения контроллера расхода на
рабочей площадке позволяет исключить в будущем проблемы с
эксплуатацией. При выборе местоположения рассмотрите
следующие вопросы:
Изучите все ограничения, которые могут налагаться
региональным, государственным и федеральным
законодательством на место расположения прибора и
требования к рабочей площадке. Примеры таких ограничений:
расстояние от фланцев труб и классификация опасных зон.
Размещайте контроллер FB107 таким образом, чтобы свести к
минимуму длину сигнальной проводки и линии электропитания.
Размещайте антенны радио и сотовой связи так, чтобы не было
препятствий на пути сигнала. При возможности размещайте
антенны в самой высокой точке площадки, не направляйте
антенны на резервуары, здания или другие высокие объекты.
При подъеме антенн соблюдайте верхние габариты.
2-2 Установка и эксплуатация Дата выпуска: февраль 2007 г.
Page 39

FloBoss 107. Руководство по эксплуатации
Для сведения к минимуму помех для радио или сотовой связи
размещайте контроллер расхода FB107 вдали от источников
электрических помех, например двигателей, больших
электродвигателей и силовых трансформаторов.
Для уменьшения риска повреждения транспортными
средствами размещайте контроллеры расхода FB107 вдали от
зон с интенсивным движением. При этом следует обеспечить
доступ к контроллеру транспортных средств для проведения
проверок и техобслуживания.
Учитывайте физические размеры контроллера расхода FB107:
Базовый блок: В196 х Ш153 х Г134 мм (7,72 х 6,22 х 5,29
дюйма ).
Базовый блок с блоком расширения: В196 х Ш317 х Г134
мм (7,72 х 12,48 х 5,29 дюйма ).
Рис. 2-1. Вид сбоку и спереди базового блока контроллера расхода FloBoss 107
Дата выпуска: февраль 2007 г. Установка и эксплуатация 2-3
Page 40

FloBoss 107. Руководство по эксплуатации
Рис. 2-2. Контроллер расхода FloBoss 107 с блоком расширения
2.1.3 Соответствие стандартам для опасных зон
Контроллер расхода FB107 соответствует классу I, раздел 2,
группы A, B, C и D. Класс, раздел и группа определяются
следующим образом:
Класс определяет общую природу опасного материала в
окружающей атмосфере. Класс I соответствует
местоположениям с наличием в воздухе горючих газов или
паров в объеме, достаточном для образования взрывчатых или
воспламеняющихся смесей.
Раздел определяет вероятность наличия в окружающей
атмосфере опасных материалов в концентрации, достаточной
для воспламенения. Местоположения, относящиеся к разделу 1,
считаются опасными. Местоположения, относящиеся к разделу
2, соответствуют зонам с повышенной концентрацией газа,
пыли или паров.
2-4 Установка и эксплуатация Дата выпуска: февраль 2007 г.
Page 41

FloBoss 107. Руководство по эксплуатации
Группа определяет наличие в окружающей атмосфере опасных
материалов. Определения групп A-D:
o Группа A – В атмосфере содержится ацетилен или
аналогично опасные газы или пары.
o Группа B – В атмосфере содержится водород или подобные
опасные газы или пары.
o Группа C – В атмосфере содержится этилен, или подобные
опасные газы или пары.
o Группа D – В атмосфере содержится пропан, или подобные
опасные газы или пары.
В опасных зонах установку контроллера расхода FB107
необходимо выполнять в соответствии со статьей 501
Национальных требований по установке электрооборудования
(NEC) и в соответствии с действующими региональными
правилами.
Внимание!
При установке оборудования в опасных зонах убедитесь, что
все устанавливаемые компоненты имеют маркировку,
указывающую на возможность их эксплуатации в таких зонах.
Установку и техобслуживание необходимо выполнять только
при отсутствии опасности. Установка в опасной зоне может
привести к нанесению травм или повреждению имущества.
2.2 Требования по электропитанию
Типовыми основными источниками электроэнергии для
контроллеров FB107 являются источники питания постоянного
напряжения и солнечная энергия. Проводка электропитания
должна прокладываться вдали от опасных зон, чувствительных
устройств контроля или радиооборудования. Подключение к
электропитанию следует выполнять в соответствии с
региональными требованиями или требованиями компании.
Необходимо строго соблюдать все региональные требования и
требования национальных правил по установке
электрооборудования (NEC).
Входное напряжение контроллера FB107 составляет 8,0-30 В на
клеммах подключения электропитания− PWR (IN+ / IN) блока CPU.
К клеммным колодкам блока CPU можно присоединять провода
сечением 16-24 AWG.
Клеммная колодка разъема AUX PWR IN допускает подсоединение
проводов сечением 12-22 AWG.
Дата выпуска: февраль 2007 г. Установка и эксплуатация 2-5
Page 42

FloBoss 107. Руководство по эксплуатации
Примечание: максимальная мощность источника постоянного тока
для контроллера FB107 с дополнительными
модулями во всех восьми слотах не должна
превышать 22 Вт.
2.3 Требования по заземлению
Требования по заземлению источников питания постоянного
напряжения определяются Национальными требованиями по
установке электрооборудования (NEC). Если применяются
источники питания постоянного тока, система заземления должна
завершаться в точке отключения от сети. Все проводники
заземляемого оборудования должны обеспечивать непрерывную
электрическую цепь до точки отключения от сети.
В статье 250-83 (1993), параграф c, Национальных требований
по установке электрооборудования определены требования по
установке и материалам для заземляющих электродов.
В статье 250-91 (1993), параграф a, Национальных требований
по установке электрооборудования определены требования к
материалам проводников заземляющих электродов.
В статье 250-92 (1993), параграф a, Национальных требований
по установке электрооборудования определены требования по
установке проводников заземляющих электродов.
В статье 250-95 (1993) Национальных требований по установке
электрооборудования определены требования к сечению
проводников заземляющих электродов.
Правильное заземление контроллера расхода FB107 позволяет
уменьшить влияние электрических помех на работу устройства и
обеспечивает защиту от молний. Контроллер расхода FB107
обеспечивает защиту от молний встроенных схем входов и
выходов. Установите ограничитель бросков напряжения в точке
отключения от сети источника питания постоянного напряжения
для защиты установленного оборудования от молний и бросков
напряжения.
Во всех точках грунтового заземления должен использоваться
заземляющий стержень или решетка с полным сопротивлением
25 Ом или меньше, измеренным с помощью тестера системы
заземления. Сопротивление заземляющего проводника между
заземлением корпуса контроллера FB107 и стержнем или решеткой
заземления должно составлять не более 1 Ом.
2-6 Установка и эксплуатация Дата выпуска: февраль 2007 г.
Page 43

FloBoss 107. Руководство по эксплуатации
Для сигнальной проводки входов/выходов рекомендуется
применять изолированную экранированную витую пару. Витая
пара и экранирование позволяют уменьшить количество ошибок
сигналов, вызванных ЭМП (электромагнитные помехи),
радиопомехами (радиочастотными помехами) и импульсными
помехами.
2.3.1 Установка заземления контроллера расхода FloBoss 107
Если на предприятии нет особых требований по заземлению,
контроллер расхода FB107 устанавливается как незаземленная
система (без подключения к земле). В противном случае следуйте
правилам, принятым на предприятии. Но в случае подсоединения
заземленного устройства к порту EIA-232 (RS-232) контроллера
расхода FB107 необходимо заземлить вход электропитания FB107.
Для этого соединение с землей контакт PWR–.
Способ установки заземления контроллера расхода FB107 зависит от
наличия на трубопроводе катодной защиты. На трубопроводах с
катодной защитой контроллер расхода FB107 необходимо
электрически изолировать от трубопровода.
Электрическую изоляцию можно выполнить при помощи
изолирующих фланцев в восходящем и нисходящем потоке
контрольного участка трубопровода. В этом случае можно
разместить контроллер расхода FB107 в корпусе, монтируемом на
фланцах или с помощью седлообразного хомута непосредственно в
контрольном участке трубопровода и заземленном при помощи
заземляющего стержня или решетки.
В трубопроводах без катодной защиты сам трубопровод
обеспечивает заземление, поэтому контроллер расхода FB107
можно устанавливать в корпусе и монтировать непосредственно в
контрольном участке трубопровода. С помощью тестера системы
заземления убедитесь, что сопротивление между трубопроводом и
землей не превышает 2 Ом. Если трубопровод обеспечивает
достаточное заземление, то устанавливать отдельный заземляющий
стержень или решетку не требуется. Заземление должно
завершаться в одной точке.
Если сопротивление трубопровод-земля превышает 2 Ом,
необходимо электрически изолировать контроллер FB107 и
установить заземляющий стержень или решетку заземления.
Дата выпуска: февраль 2007 г. Установка и эксплуатация 2-7
Page 44

FloBoss 107. Руководство по эксплуатации
2.3.2 Требования по подключению входов/выходов
Требования к подключению входов/выходов зависят от места и
области применения. Способы подключения входов/выходов
определяются требованиями регионального и государственного
законодательства, а также требованиями NEC. Для подключения
входов/выходов можно использовать кабель, уложенный
непосредственно в грунт, кабель в кабельном канале или подвесной
кабель.
Для подключения входов/выходов рекомендуется применять витую
пару. Витая пара позволяет свести к минимуму ошибки сигналов,
вызываемые электромагнитными помехами (ЭМП),
радиопомехами и импульсными помехами. Для сигнальных линий
модуля MVS используйте изолированную, экранированную витую
пару. К клеммным колодкам можно присоединять провода
сечением 16-24 AWG.
2.4 Монтаж контроллера FloBoss 107 и блока расширения
В этом разделе подробно описан процесс монтажа базового блока
контроллера расхода FB107 и блока расширения.
Осторожно
Во избежание повреждения цепей при проведении работ
внутри блока используйте соответствующие меры против
возникновения электростатических разрядов, например
заземленный браслет.
Для контроллеров, размещенных в опасной зоне (возможно
наличие взрывоопасных газов) перед выполнением работ
убедитесь, что в данный момент состояние опасности в
месте работ отсутствует. Выполнение работ в опасной зоне
может привести к травмам или повреждению имущества.
2.4.1 Необходимые инструменты
Для выполнения работ по монтажу и техобслуживанию
контроллера расхода FB107 используйте следующие инструменты.
Сведения об инструментах, необходимых для монтажа или
техобслуживания принадлежностей см. в "Руководстве по
принадлежностям контроллеров ROC/FloBoss" (форма A4637).
Крестообразная отвертка, размер 0.
Плоская отвертка, размер 2,5 мм (0,1 дюйма).
Плоская отвертка, большая.
2-8 Установка и эксплуатация Дата выпуска: февраль 2007 г.
Page 45

FloBoss 107. Руководство по эксплуатации
2.4.2 Монтаж контроллера расхода FloBoss 107 без блока расширения
Чтобы смонтировать базовый блок контроллера FB107 без блока
расширения:
1. Нанесите на стене четыре метки, соответствующие четырем
отверстиям на базовом блоке контроллера FB107 (см. Рис. 2-1).
2. Просверлите в стене четыре отверстия.
3. Установите контроллер FB107 в соответствии с
просверленными монтажными отверстиями.
4. Вставьте в отверстия на базовом блоке контроллера FB107
винты и ввинтите их в стену или монтажную панель. Не
перетягивайте винты.
Примечание: в зависимости от типа монтажа могут потребоваться
стеновые анкеры или винты большей длины, чем
поставляемые в комплекте с устройством.
Применение
крепежной панели
Для упрощения монтажа можно приобрести дополнительную
металлическую крепежную панель (артикул FS1-ADP1) для
базового блока контроллера FB107 (см. Рис. 2-3. Крепежная
панель (базовый блок FB107). Сначала устанавливается крепежная
панель, а затем на ней монтируется базовой блок контроллера
расхода FB107.
Крепежные стойки
Рис. 2-3. Крепежная панель (базовый блок FB107)
Дата выпуска: февраль 2007 г. Установка и эксплуатация 2-9
Page 46

FloBoss 107. Руководство по эксплуатации
Монтаж базового блока контроллера расхода FB107 на крепежной
панели FS1-ADP1:
1. Разместите базовый блок над крепежными стойками.
2. Закрепите базовый блок на крепежной панели с помощью
четырех винтов из комплекта поставки крепежной панели.
Крутящий момент для затяжки винтов — 10-12 дюйм/фунт.
2.4.3 Монтаж контроллера расхода FloBoss с блоком расширения
На блоке расширения имеются разъемы для подключения модулей
ввода/вывода, модуля MVS и программных модулей.
Не демонтируйте объединительную панель. На объединительной
панели нет деталей, нуждающихся в техобслуживании. Если
объединительная панель нуждается в техобслуживании, обратитесь
к региональному торговому представителю.
Примечания:
Важно точно выровнять разъемы на базовом блоке и блоке
расширения.
Процесс монтажа блока расширения значительно упрощается
при использовании дополнительной крепежной панели
(артикул FS1-ADP2).
Монтаж контроллера расхода FB107 с блоком расширения:
1. Отключите электропитание контроллера расхода FB107.
2. Выровняйте и слегка нажмите на левый край блока расширения
и правый край базового блока. Убедитесь, что разъемы
совмещены.
3. Отметьте на стене четыре монтажных отверстия в соответствии
с отверстиями на блоке расширения. См. Рис. 2-2.
4. Отсоедините блок расширения от базового блока.
5. Просверлите в стене четыре отверстия.
6. Снова присоедините блок расширения к базовому блоку и
убедитесь, что отверстия в блоке расширения совмещаются с
просверленными монтажными отверстиями.
7. Закрепите блок расширения на стене с помощью винтов. Не
перетягивайте винты.
8. Включите электропитание контроллера FB107.
Примечание: в зависимости от типа монтажа могут потребоваться
стеновые анкеры или винты большей длины, чем
поставляемые в комплекте с устройством.
2-10 Установка и эксплуатация Дата выпуска: февраль 2007 г.
Page 47

FloBoss 107. Руководство по эксплуатации
Применение
крепежной панели
Для упрощения монтажа можно приобрести дополнительную
металлическую крепежную панель (артикул FS1-ADP2) для
базового блока контроллера FB107 и блока расширения. Сначала
монтируется крепежная панель, а затем на ней монтируется
базовой блок и блок расширения.
Крепежные стойки
Зажимы
Рис. 2-4. Крепежная панель (блок расширения контроллера FB107)
Монтаж базового блока и блока расширения на крепежной панели
FS1-ADP2:
1. Отключите контроллер расхода FB107 от электропитания и
разместите базовый блок контроллера в левой стороне
крепежной панели, чтобы крепежные стойки касались
внутреннего края правой части пластикового корпуса.
2. Сместите базовый блок вправо.
Примечание: зажимы должны быть закреплены на задней
поверхности базового блока, крепежные стойки
должны показаться в крайних правых отверстиях
на пластиковом корпусе базового блока.
3. Закрепите базовый блок на крепежной панели с помощью двух
винтов, установленных в верхнем и нижнем отверстиях с
правой стороны базового блока. Крутящий момент для затяжки
винтов — 10-12 дюйм/фунт.
4. Разместите блок расширения в правой стороне крепежной
панели, чтобы крепежные стойки касались внутреннего края
левой части пластикового корпуса. Разъем на блоке расширения
должен располагаться рядом, но не касаться, разъема на
базовом блоке.
Дата выпуска: февраль 2007 г. Установка и эксплуатация 2-11
Page 48

FloBoss 107. Руководство по эксплуатации
5. Переместите блок расширения влево так, чтобы соединить
разъемы.
Примечание: зажимы должны быть закреплены на задней
6. Закрепите блок расширения на крепежной панели с помощью
двух винтов, установленных в верхнем и нижнем отверстиях с
левой стороны блока расширения. Крутящий момент для
затяжки винтов — 10-12 дюйм/фунт.
7. Установите крепежную панель на стене при помощи четырех
однодюймовых винтов.
Примечание: при добавлении блока расширения и других модулей
поверхности блока расширения, крепежные
стойки должны показаться в крайних левых
отверстиях на пластиковом корпусе блока
расширения.
необходимо изменить требования по потребляемой
мощности для контроллера расхода FB107. См. глава
3 "Определение потребляемой мощности".
2.4.4 Демонтаж блока расширения
Примечание: перед снятием блока расширения необходимо
отключить электропитание контроллера FB107 и
отсоединить все подключения всех модулей.
Демонтаж блока расширения с базового блока контроллера расхода
FB107:
1. Отключите электропитание контроллера расхода FB107.
2. Отсоедините все подключения всех модулей
3. Отверните четыре винта, крепящих блок расширения к стене.
Примечание: если используется дополнительная крепежная
панель, отверните четыре винта, крепящих блок.
4. Немного сдвиньте блок расширения вправо от базового блока
контроллера FB107.
Примечание: блок расширения отсоединяется быстро. Надежно
удерживайте блок, не допуская его падения.
5. Включите электропитание контроллера FB107.
2-12 Установка и эксплуатация Дата выпуска: февраль 2007 г.
Page 49

FloBoss 107. Руководство по эксплуатации
2.4.5 Снятие и установка крышек слотов для модулей
Перед установкой модуля ввода/вывода, MVS, программного или
коммуникационного модуля необходимо снять крышку со слота, в
который будет устанавливаться модуль.
Внимание!
Во избежание повреждения цепей при проведении работ
внутри блока используйте соответствующие меры против
возникновения электростатических разрядов, например
заземленный браслет.
Для контроллеров, размещенных в опасной зоне (возможно
наличие взрывоопасных газов) перед выполнением работ
убедитесь, что в данный момент состояние опасности в
месте работ отсутствует. Выполнение работ в опасной зоне
может привести к травмам или повреждению имущества.
Снятие крышки слотов модулей:
1. Нажмите на выступ с правой стороны крышки слота.
2. Приподнимите крышку и снимите ее.
Примечание: если модуль демонтируется на длительный срок,
установите на пустой слот крышку для
предотвращения попадания внутрь контроллера
FB107 пыли и других посторонних предметов.
Установка крышки слотов модулей:
1. Разместите крышку над пустым слотом. Выступы на левой
стороне крышки слотов позволяют выровнять крышку
относительно слота.
2. Опустите крышку так, чтобы защелкнулись фиксаторы.
2.4.6 Установка и снятие крышек проводных каналов
После подключения клеммных колодок установите крышки
проводных каналов. Крышки проводных каналов расположены на
передней панели контроллера расхода FB107.
Снятие крышки проводного канала:
1. Захватите левый или правый край крышки проводного канала.
2. Вытащите крышку из проводного канала.
Установка крышки проводного канала:
1. Выровняйте крышку по проводному каналу, обеспечив
беспрепятственный доступ к проводу.
2. Нажмите на крышку, так чтобы она зафиксировалась в
проводном канале.
Дата выпуска: февраль 2007 г. Установка и эксплуатация 2-13
Page 50

FloBoss 107. Руководство по эксплуатации
2.5 Резервная батарея ЗУ
Суперконденсатор и батарея монетного типа обеспечивают
резервное электропитание для статического ОЗУ и часов реального
времени. Это позволяет хранить краткосрочные и долгосрочные
данные, конфигурации и поддерживать работоспособность
контроллера FB107, если он находится вне эксплуатации или на
хранении.
Примечание: батарею можно заменить стандартной литиевой
батареей монетного типа CR2032 (DL2032).
Внимание!
Во избежание повреждения цепей при проведении работ
внутри блока используйте соответствующие меры против
возникновения электростатических разрядов, например
заземленный браслет.
Для контроллеров, размещенных в опасной зоне (возможно
наличие взрывоопасных газов) перед выполнением работ
убедитесь, что в данный момент состояние опасности в
месте работ отсутствует. Выполнение работ в опасной зоне
может привести к травмам или повреждению имущества.
2-14 Установка и эксплуатация Дата выпуска: февраль 2007 г.
Page 51

FloBoss 107. Руководство по эксплуатации
2.5.1 Удаление и установка батареи
Удаление батареи с объединительной панели:
1. Отключите электропитание контроллера расхода FB107.
Резервное
питание ЗУ
Рис. 2-5. Крышка резервной батареи питания ЗУ
2. Переместите крышку резервной батареи питания влево.
3. Снимите батарею, вынув ее из разъема.
4. Установите новую батарею положительным полюсом вверх.
Слегка прижмите ее, чтобы она встала на место.
5. Установите крышку над резервной батареей питания ЗУ.
6. Включите электропитание контроллера FB107.
Примечание: замена суперконденсатора в условиях эксплуатации
не предусмотрена.
2.6 Центральный процессор (CPU)
В базовом блоке контроллера расхода FB107 имеется четыре слота.
Слот 0 предназначен для модуля CPU. Модуль CPU обеспечивает
подключение к внешним цепям, включая защиту от бросков
напряжения и от статического электричества для внешних цепей.
Электронное оборудование включает модуль RTD,
коммуникационный модуль и блок питания.
Дата выпуска: февраль 2007 г. Установка и эксплуатация 2-15
Page 52

FloBoss 107. Руководство по эксплуатации
Модуль CPU содержит микропрограммное обеспечение, три
встроенных порта передачи данных и индикаторы, кнопку
перезагрузки (RST), вход модуля RTD и индикатор питания,
свидетельствующий о нормальной работе системы.
Установленная батарея с суперконденсатором обеспечивает
резервное питание для хранения данных и работы часов реального
времени при отключении основного электропитания.
"Токовая петля" +
Электропитание +
Электропитание —
LOI Tx
LOI Rx (прием)
LOI RTS
Заземление
RS-485 A
RS-485 B
RS-232 Tx (передача)
RS-232 Rx (прием)
RS-232 RTS
Заземление
Датчик RTD
RTD +
RTD —
Обратный сигнал RTD
Выход "токовой петли"
Подключение электропитания
Локальный порт LOI
EIA-232 (RS-232)
EIA-485 (RS-485)
COM1
EIA-232 (RS-232)
COM2
Кнопка перезагрузки
Терморезистор
(RTD)
Рис. 2-6. Модуль CPU
2.6.1 Снятие модуля CPU
Внимание!
2-16 Установка и эксплуатация Дата выпуска: февраль 2007 г.
Несоблюдение мер предосторожности, связанных с
электростатическими разрядами, таких как использование
заземленного браслета, может привести к сбросу процессора
или повреждению электронных компонентов.
Для контроллеров, размещенных в опасной зоне (возможно
наличие взрывоопасных газов) перед выполнением работ
убедитесь, что в данный момент состояние опасности в месте
работ отсутствует. Выполнение работ в опасной зоне может
привести к травмам или повреждению имущества.
Page 53

Снятие модуля CPU:
1. Выполните процедуру резервного копирования, описанную в
2. Отключите электропитание контроллера расхода FB107.
3. Отключите от модуля CPU все провода.
4. Захватите модуль CPU за рифленые края с обеих сторон и
Рифленые края
FloBoss 107. Руководство по эксплуатации
разделе "Сохранение конфигурации и архивных данных" в главе
7 "Поиск и устранение неисправностей".
потяните его осторожно (см. Рис. 2-7). Слегка сдвиньте крышку
вперед, чтобы освободить фиксатор модуля.
Рис. 2-7. Рифленые края на модуле CPU
5. Осторожно извлеките модуль из объединительной панели.
2.6.2 Установка модуля CPU
Внимание!
Несоблюдение мер предосторожности, связанных с
электростатическими разрядами, таких как использование
заземленного браслета, может привести к сбросу процессора
или повреждению электронных компонентов.
Для контроллеров, размещенных в опасной зоне (возможно
наличие взрывоопасных газов) перед выполнением работ
убедитесь, что в данный момент состояние опасности в месте
работ отсутствует. Выполнение работ в опасной зоне может
привести к травмам или повреждению имущества.
Установка модуля CPU:
1. Отключите электропитание контроллера расхода FB107.
2. Установите модуль CPU в слот 0.
Дата выпуска: февраль 2007 г. Установка и эксплуатация 2-17
Page 54

FloBoss 107. Руководство по эксплуатации
Примечание: выводы модуля CPU должны быть обращены
3. Вставьте модуль CPU в слот. Разъем на нижней стороне модуля
CPU должен надежно войти в разъем на объединительной
панели.
4. Подключите модуль CPU.
5. Просмотрите раздел "Перезапуск и изменение конфигурации
контроллера расхода FB107" в главе 7 "Поиск и устранение
неисправностей".
6. Включите электропитание контроллера FB107.
2.7 Лицензионные ключи
Лицензионные ключи с действующими лицензионными кодами
предоставляют доступ к приложениям или позволяют
задействовать дополнительные функции микропрограммного
обеспечения. Перед запуском программы также может
потребоваться ввод лицензионного ключа. Примерами
лицензированных программ могут служить программы расчета
расхода или свойств и различные пользовательские программы.
Эти программы можно сконфигурировать при помощи функции
администратора лицензионных ключей программы ROCLINK 800
(Utilities > License Key Administrator). (Утилиты - Администратор
лицензионных ключей).
влево. Выступ на корпусе модуля исключает его
неправильную установку.
Если удалить лицензионный ключ после запуска приложения,
микропрограмма прерывает выполнение задания. Это
предотвращает несанкционированное выполнение защищенных
программ.
Примечание: при установке или удалении лицензионного ключа
необходимо отключить и снова включить
электропитание контроллера FB107.
2.8 Включение и эксплуатация
Перед включением контроллера расхода FB107 выполните
проверку и убедитесь, что устройство установлено правильно.
Проверьте правильность подключения внешних цепей.
Проверьте правильность полярности подключения
электропитания.
Убедитесь, что в объединительной панели установлены модуль
CPU, модули ввода/вывода, модуль MVS, модуль приложений и
коммуникационные модули.
2-18 Установка и эксплуатация Дата выпуска: февраль 2007 г.
Page 55

Убедитесь, что на входе электропитания установлен
2.8.1 Включение
Перед включением электропитания контроллера расхода FB107
определите требования к электропитанию (включая базовый блок,
блок расширения и все установленные модули и периферийные
устройства), соответствующие конфигурации контроллера FB107.
См. раздел "Определение потребляемой мощности" в главе 3
"Подключение электропитания".
Включите электропитание контроллера FB107. Индикатор
электропитания PWR+ должен светиться зеленым цветом. Это
означает, что напряжение питания в норме и контроллер работает в
допустимом режиме.
После выполнения загрузочной диагностики (проверка ОЗУ и
других элементов) можно зарегистрироваться в контроллере FB107,
что подтверждает правильное завершение процедуры сброса FB107.
Если зарегистрироваться в контроллере расхода FB107 не удается,
возможные причины см. в главе 7 "Поиск и устранение
неисправностей".
FloBoss 107. Руководство по эксплуатации
предохранитель. Подключите питание к разъему AUX PWR IN
на базовом блоке или к разъему PWR+ / PWR − на модуле CPU.
Внимание!
Перед включением электропитания контроллера расхода FB107
проверьте полярность подключения питания. Неправильная
полярность подключения может привести к повреждению
контроллера FB107.
Для контроллеров, размещенных в опасной зоне (возможно
наличие взрывоопасных газов) перед выполнением работ
убедитесь, что в данный момент состояние опасности в месте
работ отсутствует. Выполнение работ в опасной зоне может
привести к травмам или повреждению имущества.
2.8.2 Эксплуатация
После успешного запуска необходимо сконфигурировать
контроллер FB107 в соответствии с требованиями конкретной
области применения. Процедуры конфигурирования и калибровки
входов/выходов контроллера расхода FB107 описаны в "ROCLINK
800, Руководство пользователя конфигурационного программного
обеспечения (для FloBoss 107) (Форма A6217). После конфигурации
и калибровки контроллер расхода FB107 готов к эксплуатации.
Дата выпуска: февраль 2007 г. Установка и эксплуатация 2-19
Page 56

FloBoss 107. Руководство по эксплуатации
Во время эксплуатации можно вести локальное или удаленное
наблюдение за работой контроллера расхода FB107, просматривать
или получать текущие и архивные данные. Локальный контроль
осуществляется при помощи программы ROCLINK 800,
выполняющейся на ПК, соединенном с контроллером через порт
LOI. Удаленный контроль выполняется при помощи программы
ROCLINK 800, выполняющейся на компьютере, соединенном с
контроллером через порты COM1-COM3.
Для контроллера расхода FB107 имеется несколько программных
настроек (параметров), которые необходимо задать до калибровки
и включения устройства в рабочий режим. Конфигурация
контроллера расхода FB107 выполняется при помощи программы
ROCLINK 800, выполняющейся на IBM-совместимом компьютере.
Как правило, для передачи данных конфигурации на контроллер
компьютер соединяется с портом LOI контроллера FB107, хотя
имеется возможность выполнить конфигурирование в автономном
режиме и позднее загрузить в контроллер файл конфигурации.
Микропрограмма контроллера FB107 предоставляет для всех
параметров значения по умолчанию. Если для конкретной области
применения воз можно использование значения по умолчанию, не
изменяйте заводские установки контроллера.
2-20 Установка и эксплуатация Дата выпуска: февраль 2007 г.
Page 57

FloBoss 107. Руководство по эксплуатации
р
)
Глава 3 – Подключение электропитания
В этой главе описано подключение электропитания от источника
напряжения постоянного тока.
Содержание
3.1 Описание разъема для подключения электропитания ................. 3-1
3.2 Определение потребляемой мощности..........................................3-3
3.3 Монтажные соединения ................................................................. 3-10
3.4 Подключение электропитания к модулю CPU..............................3-11 U
3.1 Описание разъема для подключения электропитания
Разъемы подключения электропитания контроллера расхода FB107
(разъем AUX PWR IN (Вход внешнего источника электропитания)
на базовом блоке или разъемы для подключения электропитания на
модуле CPU) служат для преобразования внешнего электропитания
в напряжение, соответствующее требованиям электронных схем
контроллера FB107.
AUX PWR IN
(Вход внешнего
источника
элект
опитания
Рис. 3-1. Разъемы для подключения электропитания контроллера FB107
Внимание!
При установке оборудования в опасных зонах убедитесь, что все
устанавливаемые компоненты имеют маркировку, указывающую
на возможность их эксплуатации в таких зонах. Установку и
техническое обслуживание необходимо выполнять только в
безопасных зонах. Установка в опасной зоне может привести к
травматизму людей или повреждению имущества.
Подключение
электропитания
Модуль
CPU
Дата выпуска: февраль 2007 г. Подключение электропитания 3-1
Page 58

FloBoss 107. Руководство по эксплуатации
Проводка электропитания должна прокладываться вдали от
опасных зон, чувствительных устройств контроля или
радиооборудования. Подключение к электропитанию следует
выполнять в соответствии с региональными требованиями и
требованиями компании. Необходимо строго соблюдать все
региональные требования и требования национальных правил по
установке электрооборудования (NEC).
Требования
к электропитанию
Источник напряжения постоянного тока является основным
источником питания для контроллеров FB107. Входное
напряжение контроллера FB107 составляет 8,0-30 В на разъеме
AUX PWR IN базового блока или на разъемах PWR (IN+ / IN−)
модуля CPU. Клеммная колодка разъема AUX PWR IN допускает
подсоединение проводов сечением 12-22 AWG.
Примечание: максимальная мощность источника постоянного тока
для контроллера FB107 с дополнительными
модулями во всех восьми слотах не должна
превышать 22 Вт.
Потребляемая мощность контроллера FB107 и блоков расширения
определяет текущие требования к внешнему источнику
электропитания.
Вход электропитания модуля CPU оборудован съемной клеммной
колодкой для подсоединения проводов и обслуживания. К
клеммным колодкам можно присоединять провода сечением от 16
до 24 AWG (американский сортамент проводов).
Примечание: Модуль CPU изолирован от внешней логики.
Программа ROCLINK 800 позволяет сконфигурировать
дополнительный узел ввода/вывода модуля CPU для задания
значений напряжения "токовой петли" 10 или 24 В пост. тока.
Модуль ввода/вывода поддерживает только выход "токовой петли"
24 В постоянного тока.
Примечание: узел ввода/вывода CPU использует разъемы выхода
"токовой петли" и заземления модуля CPU.
Выход "токовой петли" предназначен для устройств, которым
требуется электропитание 24 В постоянного тока с заземлением,
что позволяет передавать на контроллер расхода FB107 сигнал 4-20
мА от датчиков давления, температуры, уровня и т.п.
Выход "токовой петли" 10 В предназначен для маломощных
датчиков. Ток "петли", равный 80 мА, рассчитан на питание двух
внешних устройств, подключенных к двум аналоговым входам.
3-2 Подключение электропитания Дата выпуска: февраль 2007 г.
Page 59

FloBoss 107. Руководство по эксплуатации
Примечание: если напряжение на входе превышает напряжение
"петли" 10 В, последнее выравнивается в
соответствии со входным напряжением. Например,
если на вход PWR IN подается 14 В постоянного
тока и выбран выход с напряжением 10 В, на выходе
"петли" будет напряжение 14 В пост. тока.
Можно использовать токовые аналоговые входы 4-20 мА, если в
конфигурации AI, выполняемой при помощи ROCLINK 800,
выбрать резистор 250 Ом.
Табл. 3 -1. Входные разъемы клеммной колодки
Клеммные
колодки
PWR (IN + / IN –) Допустимо до 28 В пост. тока с выпрямителя или другого
источника питания 28 В пост. тока.
LOOP (Петля) и
GND (Заземление)
Подача 10 или 24 В пост. тока на внешние устройства.
Защита с ограничением по току.
Определение В пост. тока
8-30 В пост. тока
10 или 24 В пост.
тока
3.2 Определение потребляемой мощности
Для определения и доступа к требованиям по электропитанию для
каждого компонента системы используйте Табл. 3-2 и 3-3. Если
подаваемое электропитание недостаточно, для внешних устройств
следует использовать другой источник питания или уменьшить
энергопотребление.
Для определения требований по потребляемой мощности
контроллера расхода FB107 выполните следующие действия:
1. Определите необходимую конфигурацию контроллера расхода
FB107, включая определение все модулей, реле, измерительных
устройств, электромагнитных катушек, радиопередатчиков,
преобразователей и других устройств, потребляющих
постоянный ток в полной конфигурации контроллера FB107
(базовый блок и блок расширения).
2. Рассчитайте потребляемую мощность в "наихудшем случае"
для данной конфигурации. Для этого просуммируйте
потребляемую модность всех установленных модулей, а также
потребляемую мощность внешних устройств, подключенных к
контроллеру через разъем LOOP.
Примечание: "Строка №” соответствует номеру строки в Табл.
3-2.
3. Строка 1 − Выберите напряжение электропитания: 12 или 24 В
пост. тока
Дата выпуска: февраль 2007 г. Подключение электропитания 3-3
Табл. 3-2.
Page 60

FloBoss 107. Руководство по эксплуатации
4. Строка 2 − Определите тип модуля CPU, используемого в
Табл. 3-2. Расчетная мощность (мВт):
Неизолированный FB107 = 360
Изолированный FB107 = 540
5. Строка 3 − Укажите, используется ли в модуле CPU узел
ввода/вывода в Табл. 3-2. Расчетная мощность (мВт):
Без узла ввода/вывода модуля CPU = 0
С узлом ввода/вывода модуля CPU = 36
6. Строка 4 − Определите, сколько модулей ввода/вывода
используется в
Без модулей ввода/вывода = 0
Один модуль ввода/вывода = 180
Два модуля ввода/вывода = 360
Три модуля ввода/вывода = 540
Четыре модуля ввода/вывода = 720
Пять модулей ввода/вывода = 900
Шесть модулей ввода/вывода = 1080
Табл. 3-2. Расчетная мощность (мВт):
7. Строка 5 − Укажите, используется ли коммуникационный
модуль EIA-232 (RS-232) в Табл. 3-2. Расчетная мощность
(мВт):
Без коммуникационного модуля EIA-232 (RS-232) = 0
Один коммуникационный модуль EIA-232 (RS-232) = 36
8. Строка 6 − Укажите, используется ли коммуникационный
модуль EIA-485 (RS-485) в Табл. 3-2. Расчетная мощность
(мВт):
Без коммуникационного модуля EIA-232 (RS-232) = 0
Один коммуникационный модуль EIA-232 (RS-232) = 36
9. Строка 7 – Укажите, используется ли модуль MVS в Табл. 3-2.
10. Строка 8 − Укажите, используется ли сенсор удаленного
монтажа MVS в
Табл. 3-2. Расчетная мощность (мВт):
Без сенсора удаленного монтажа MVS = 0
Один сенсор удаленного монтажа MVS = 180
Два сенсора удаленного монтажа MVS = 360
Три сенсора удаленного монтажа MVS = 540
Четыре сенсора удаленного монтажа MVS = 720
3-4 Подключение электропитания Дата выпуска: февраль 2007 г.
Page 61

FloBoss 107. Руководство по эксплуатации
11. Строка 9 − Укажите, используется ли DVS в Табл. 3-2.
Расчетная мощность (мВт):
Без DVS = 0
Один DVS = 12
12. Строка 10 − Сумма строк 2-9 в столбце "Расчетная мощность
(мВт)" Табл. 3-2.
13. Строка 11 − Преобразование общей расчетной мощности (мВт)
в ватты:
Ватт = мВт ÷ 1000
14. Строка 12 − Определение требований к электропитанию для
промышленных устройств в ваттах. См. Табл. 3-3.
15. Строка 13 − Добавьте значение FloBoss Total in (Watts)
(Общее значение в ваттах контроллера FloBoss) из Табл. 3-2 к
значению для промышленных устройств из Табл. 3-3 (ватты)
для определения общих требований к электропитанию (оценка
общей потребляемой мощности).
Строка 14 суммирует требования к электропитанию для FloBoss
и для внешних устройств (в ваттах).
16. Строка 14 − Рассчитайте потребляемый ток для энергосистемы:
"Ток в амперах" = "Общая мощность", разделенная на
"Входное напряжение"
Дата выпуска: февраль 2007 г. Подключение электропитания 3-5
Page 62

FloBoss 107. Руководство по эксплуатации
Табл. 3-2. Оценка потребляемой мощности
Стр-
ока
Вход
электропитания
1
системы
Базовый блок,
включая модуль
2
CPU и
объединительную
панель
Блок расширения − − −
3
Входы/выходы
4
5
Модули COM
6
7 Модуль MVS
8 Сенсоры MVS
9
DVS
10 мВт (Сумма по строкам 2-9)
11
12 Общая потребляемая мощность для внешних устройств из Табл. 3-3 (ватты)
Общие требования к электропитанию для FloBoss и внешних устройств в ваттах
13
14
Заданные значения =
Расчетные значения =
Расчетная мощность (мВт) = Кол-во * (В пост. тока * мА) * Продолжительность включения
Примечание: базовый блок = модуль CPU, объединительная панель, коммуникационные модули,
индикаторы и вход RTD
"Ток в амперах" = "Общая мощность", разделенная на "Входное напряжение" (строка 14)
Потребляемый системой ток от источника электропитания
Номинальное
значение
12 или 24
Неизолированный 0 или 1 12 30 100%
Изолированный
Узел ввода/вывода
CPU
Модули
ввода/вывода
RS-232
RS-485
MVS
MVS удаленного
монтажа
Общее значение для FloBoss в ваттах (строка 10 ÷ 1000)
В пост.
тока
Колич-
ество
0 или 1 12 45 100%
0 или 1 12 3 100%
0 или 1 12 3 100%
0 или 1 12 3 100%
0 или 1 12 10 100%
0, 1, 2,
3 или 4
0 или 1 12 1 100%
Напряже-
ние
электро-
питания
(В пост.
тока)
0-6 12 15 100%
12 15 100%
Номинал-
ьный ток
(мА)
0 100%
(строка 12 + строка 13)
Продо-
лжител-
ьность
включе-
ния
Расчет-
ная
мощность
(мВт)
360 или
540
3-6 Подключение электропитания Дата выпуска: февраль 2007 г.
Page 63

Табл. 3-3. Потребляемая мощность для внешних устройств
Внешние устройства
Датчики
Передача данных
Радиоканал
Отображение
Дополнительное
оборудование
Токовые петли
Прием
Ожидание
Передача
FloBoss 107. Руководство по эксплуатации
Напряжение
Количе-
ство
24 20
электропи-
тания (В
пост. Тока)
Номинал-
ьный ток
(мА)
Ватт = мВт ÷ 1000
Продолж-
итель-
ность
включ-
ения
Расчетная
мощность
(мВт)
мВт
Ватт
Значение для внешних устройств включает все внешнее
оборудование, подключенное к контроллеру FB107 и получающее
от него электропитание.
Дата выпуска: февраль 2007 г. Подключение электропитания 3-7
Page 64

FloBoss 107. Руководство по эксплуатации
Табл. 3-4. Пример потребляемой мощности
Стр-
ока
Вход
электропитания
1
системы
Базовый блок,
включая модуль
2
CPU и
объединительную
панель
Блок расширения − − −
3
Входы/выходы
4
5
Модули COM
6
7 Модуль MVS
8 Сенсоры MVS
9
DVS
10 мВт (Сумма по строкам 2-9) 792.00
11
12 Общая потребляемая мощность для внешних устройств из (ватт) 1,35
Общие требования к электропитанию для FloBoss и внешних устройств в ваттах
13
14 Потребляемый системой ток от источника электропитания 2,14
Номинальное
значение
24
Неизолированный 1 12 30 100%
Изолированный
Узел ввода/вывода
CPU
Модули
ввода/вывода
RS-232
RS-485
MVS
MVS удаленного
монтажа
Общее значение для FloBoss в ваттах (строка 10 ÷ 1000)
В пост.
тока
Количе-
ство
Напряже-
ние
электропи-
тания
(В пост.
тока)
0 12 45 100%
1 12 3 100% 36
2 12 15 100% 360
1 12 3 100% 36
0 12 3 100% 0
0 12 10 100% 0
0 12 15 100% 0
0 12 1 100% 0
Номинал-
ьный ток
(мА)
0 100%
(строка 12 + строка 13)
Продол-
житель-
ность
включе-
ния
Расчет-
ная
мощность
(мВт)
360
0,80
2,15
0
3-8 Подключение электропитания Дата выпуска: февраль 2007 г.
Page 65

FloBoss 107. Руководство по эксплуатации
Продолж-
итель-
ность
включе-
ния
Расчетная
мощность
(мВт)
Внешние устройства
Внешние
Токовые петли 2 24 20 60% 576
Количе-
ство
Напряжение
электропи-
тания (В
пост. тока)
Номиналь-
ный ток
(мА)
преобразователи
Дискретный
1 12 2 30% 7,2
выход
Передача данных
Радиоканал Прием 1 12 3 15% 5,4
Ожидание 1 12 0,5 80% 4,8
Передача 1 12 250 5% 150
Отображение 0 12 100% 0
Дополнительное
1 12 50 100% 600
оборудование
мВт 1343,4
Ватт 1,3434
Дата выпуска: февраль 2007 г. Подключение электропитания 3-9
Page 66

FloBoss 107. Руководство по эксплуатации
3.3 Монтажные соединения
В этом разделе показано, как подсоединить контроллер расхода
FB107 к источнику электропитания, устройствам ввода/вывода и
коммуникационным устройствам. Во избежание повреждения
оборудования используйте рекомендации и процедуры,
представленные в данном разделе.
Примечание: перед включением электропитания проверьте
полярность.
Внешние разъемы или клеммы периферийных устройств
расположены на модуле CPU или на дополнительных модулях. К
клеммным колодкам можно присоединять провода сечением от 16
до 24 AWG.
Внимание!
Внимание!
Перед проведением любых монтажных работ всегда отключайте
контроллер расхода от электропитания. Подключение
оборудования под напряжением может привести к травматизму
людей или повреждению оборудования.
Во избежание повреждения цепей при работе внутри блока,
используйте соответствующие меры против возникновения
электростатических разрядов, например заземленный браслет.
Требования к подключению входов/выходов зависят от места и
области применения. Способы подключения входов/выходов
определяются требованиями регионального и государственного
законодательства, а также требованиями NEC. Для подключения
входов/выходов можно использовать кабель, уложенный
непосредственно в грунт, кабель в кабельном канале или подвесной
кабель.
Несоблюдение мер предосторожности, связанных с
электростатическими разрядами, таких как использование
заземленного браслета, может привести к сбросу процессора или
повреждению электронных компонентов.
Подсоединение провода к съемным клеммным панелям:
1. Удалите с конца провода изоляцию примерно на ¼ дюйма.
2. Вставьте оголенный конец провода в зажим под винтом клеммы.
3. Затяните винт. Следите за тем, чтобы не перетянуть его.
Во избежание короткого замыкания старайтесь уменьшить длину
оголенного провода. Для исключения натяжения провода должны
немного провисать.
3-10 Подключение электропитания Дата выпуска: февраль 2007 г.
Page 67

FloBoss 107. Руководство по эксплуатации
Примечание: для подключения сигналов ввода/вывода
рекомендуется применять витую пару.
3.4 Подключение электропитания к модулю CPU
Как правило, для подачи электропитания на контроллер расхода
FB107 используется разъем AUX PWR IN на базовом блоке FB107.
Также можно подключить электропитание непосредственно к
модулю CPU.
Электропитание +
Электропитание –
"Токовая петля" +
Рис. 3-2. Подключение электропитания, модуль CPU
На модуле CPU установлены зажимные клеммы. На клеммах
подключения электропитания (IN+ / IN−) используется съемный
разъем, допустимое сечение проводов — от 16 до 24 AWG. См.
раздел 3.3, "Монтажные соединения".
Входное напряжение контроллера FB107 составляет 8,0-30 В на
клеммах подключения электропитания PWR IN+ / IN−.
Клеммы с меткой IN+ предназначены для положительного провода
(8,0-30 В), клеммы IN− — для отрицательного (общий разъем
батареи). См. Табл. 3-2.
Примечание: при выборе сечений проводов, их трассировке и
подключении электропитания следует
руководствоваться испытанными на практике
методиками. Все соединения должны соответствовать
региональным, государственным нормам и нормам NEC.
Дата выпуска: февраль 2007 г. Подключение электропитания 3-11
Page 68

FloBoss 107. Руководство по эксплуатации
3-12 Подключение электропитания Дата выпуска: февраль 2007 г.
Page 69

FloBoss 107. Руководство по эксплуатации
Глава 4 – Входы/выходы и вход терморезистора RTD
В этой главе описаны точки подключения входов/выходов (I/O) на
дополнительном узле ввода/вывода модуля CPU и на модулях
ввода/вывода. Точки ввода/вывода обеспечивают дополнительные
входы и выходы, что позволяет реализовать режимы с
расширенным контролем и управлением. В этой главе также
описан вход терморезистора (RTD) на модуле CPU.
Содержание
4.1 Описание модуля ввода/вывода ..................................................... 4-1
4.2 Установка модуля .............................................................................4-5
4.3 Удаление модуля.............................................................................. 4-6
4.4 Подключение модуля .......................................................................4-7
4.5 Выбор типа входов/выходов ............................................................ 4-7
4.6 Аналоговые входы (AI) .....................................................................4-9
4.6.1 Подключение аналоговых входов .................................... 4-10
4.7 Аналоговые выходы (AO) ............................................................... 4-12
4.7.1 Подключение аналоговых выходов.................................. 4-12
4.8 Дискретные входы (DI) ................................................................... 4-13
4.8.1 Подключение дискретных входов ....................................4-14
4.9 Дискретные выходы (DO) ............................................................... 4-15
4.9.1 Подключение дискретных выходов.................................. 4-16
4.10 Импульсные входы (PI) ..................................................................4-16
4.10.1 Подключение импульсных входов.................................... 4-17
4.11 Вход терморезистора (RTD) ..........................................................4-18
4.11.1 Подключение входа RTD...................................................4-19
4.1 Описание модуля ввода/вывода
Микропроцессор использует входы/выходы для контроля,
управления и сбора данных от внешних устройств,
подсоединенных к каналам ввода/вывода. Каналы ввода/вывода
оборудованы съемными подключаемыми клеммными колодками
для подключения периферийных устройств. Расширенный модуль
ввода/вывода с 6 точками подключения можно заказать в
следующем исполнении:
Узел ввода/вывода, монтируемый непосредственно на модуле
CPU.
Модули ввода/вывода, устанавливаемые в слотах
ввода/вывода.
Оба варианта исполнения предусматривают разъемы для шести
точек ввода/вывода и обеспечивают одинаковый выбор
входов/выходов.
Шесть точек ввода/вывода представляют собой:
Два аналоговых (AI) или дискретных входа (DI).
Дата выпуска: февраль 2007 г. Входы/выходы и вход терморезистора RTD 4-1
Page 70

FloBoss 107. Руководство по эксплуатации
Один аналоговый (AO) или дискретный выход (DO).
Один дискретный выход (DO).
Два импульсных (PI) или дискретных входа (DI).
С помощью программы ROCLINK 800 можно выбрать и
сконфигурировать пять из шести точек ввода/вывода. Выбор
входов и выходов выполняется с помощью диалогового окна I/O
Setup (Настройка ввода/вывода) программы ROCLINK 800.
К базовому блоку контроллера FB107 можно добавить блок
расширения и увеличить количество входов/выходов за счет
добавления четырех слотов, что в сумме составит шесть слотов для
модулей ввода/вывода. В контроллере FB107 можно предусмотреть
до 42 точек ввода/вывода.
Модули ввода/вывода можно устанавливать в слоты 1-3 базового
блока контроллера FB107 и в слоты 4-6 в блоке расширения. Если в
слот 1 установлен модуль, не выполняющий функции ввода/вывода,
то модуль ввода/вывода можно установить в слот 7 блока
расширения. Контроллер FB107 может обрабатывать данные шести
модулей ввода/вывода и одного узла ввода/вывода модуля CPU.
К контроллеру FB107 подключены следующие сигналы
ввода/вывода:
Аналоговые входные сигналы (AI), позволяющие
контролировать различные аналоговые значения с
периферийных устройств.
Дискретные (DI) и импульсные входные сигналы (PI),
позволяющие контролировать различные дискретные и
импульсные значения с внешних устройств.
Аналоговые (AO) и дискретные выходы (DO), позволяющие
управлять различными контрольными приборами.
Вход RTD позволяет контролировать различные аналоговые
значения температуры.
Все модули устанавливаются в слоты в передней части базового
блока контроллера FB107 или блока расширения. Узел
ввода/вывода CPU монтируется на модуле CPU.
Питание модулей ввода/вывода подается с объединительной
панели. На каждом модуле имеется преобразователь постоянного
тока, содержащий логические элементы, элементы управления и
обеспечивающий электропитание для периферийных устройств.
Узел ввода/вывода CPU использует логику, элементы управления и
электропитание с модуля CPU.
В контроллере расхода FB107 применяется защита с ограничением
тока короткого замыкания, поэтому не требуется устанавливать
предохранители на выходах "токовой петли" и в аналоговых входах.
4-2 Входы/выходы и вход терморезистора RTD Дата выпуска: февраль 2007 г.
Page 71

FloBoss 107. Руководство по эксплуатации
На рисунке 4-1 и в таблице 4-1 представлено назначение клемм на
модуле ввода/вывода. На рисунке 4-2 и в таблице 4-2 представлено
назначение клемм на дополнительном узле ввода/вывода модуля
CPU.
Примечание: возможны небольшие различия в расположении
клемм.
Выход "токовой петли"
AI1+/DI1+
GND – (общий)
AI2+/DI2+
AO+/DO1+
AO–/DO1–
DO2+
DO2–
PI1+/DI3+
GND – (общий)
PI2+/DI4+
NC (не подключено)
GND – (общий)
Рис. 4-1. Модуль ввода/вывода
Дата выпуска: февраль 2007 г. Входы/выходы и вход терморезистора RTD 4-3
Page 72

FloBoss 107. Руководство по эксплуатации
Табл. 4-1. Клеммы входов/выходов на модулях ввода/вывода
Номер
клеммы
13 Выход "токовой
12 AI1+/DI1+
11 GND – (общий)
10 AI2+/DI2+
9 AO+/DO1+
8
7 DO2+
6
5 PI1+/DI3+
4 GND – (общий)
3 PI2+/DI4+
2 NC (не
1 GND – (общий)
Тип входа/выхода
петли"
AO-/DO1−
DO2−
подключено)
AI1+/DI1+
GND – (общий)
AI2+/DI2+
AO+/DO1+
AO–/DO1–
DO2+
DO2–
PI1+/DI3+
GND – (общий)
PI2+/DI4+
Рис. 4-2. Дополнительный узел ввода/вывода модуля CPU
4-4 Входы/выходы и вход терморезистора RTD Дата выпуска: февраль 2007 г.
Page 73

FloBoss 107. Руководство по эксплуатации
Табл. 4-2. Клеммы входов/выходов на дополнительном узле ввода/вывода модуля CPU
Номер
клеммы
10 AI1+/DI1+
9 GND – (общий)
8 AI2+/DI2+
7 AO+/DO1+
6
5 DO2+
4
3 PI1+/DI3+
2 GND – (общий)
1 PI2+/DI4+
Тип
входа/выхода
AO-/DO1−
DO2−
4.2 Установка модуля
Конструкция всех модулей контроллера FB107 обеспечивает
простоту их монтажа и демонтажа. Модули не содержат
компонентов, подлежащих техническому обслуживанию.
Примечание: выступ на корпусе модуля исключает его
неправильную установку.
Монтаж модуля ввода/вывода в базовом блоке или блоке
расширения:
1. Отключите электропитание контроллера расхода FB107.
2. Снимите крышку канала проводных соединений.
3. Выполните одно из следующих действий:
Если в слот уже установлен модуль, извлеките его. См.
раздел 4.3 "Удаление модуля".
Если слот пуст, снимите крышку слота.
4. Вставьте модуль в слот базового блока или блока расширения.
Убедитесь, что модуль ориентирован правильно. Слегка
надавите на модуль, чтобы его разъем плотно вошел в разъем
на объединительной панели.
Примечание: не следует применять чрезмерное усилие, если не
удается вставить разъем легко. Извлеките модуль
и проверьте состояние контактов. Они могут
погнуться. В таком случае аккуратно выпрямите
контакты и снова вставьте модуль в слот. Задняя
часть модуля должна полностью касаться
разъема на объединительной панели.
Дата выпуска: февраль 2007 г. Входы/выходы и вход терморезистора RTD 4-5
Page 74

FloBoss 107. Руководство по эксплуатации
5. Подключите модуль ввода/вывода. См. раздел 4.4
"Подключение модуля ввода/вывода".
6. Снимите крышку канала проводных соединений.
Внимание!
Запрещается подсоединять экран кабеля к клемме "подвешенная
земля" или к общей клемме модуля ввода/вывода или узла
ввода/вывода модуля CPU. В противном случае модуль
ввода/вывода может быть поврежден при разрядах статического
электричества. Подсоединяйте экран провода только к
подходящему контакту заземления.
7. Включите электропитание контроллера FB107.
8. Запустите программу ROCLINK 800 и выполните вход в
систему.
9. Сконфигурируйте точку ввода/вывода.
Примечание: для идентификации модуля программой ROCLINK
800 необходимо отключить и снова включить
электропитание.
4.3 Удаление модуля
Удаление модуля ввода/вывода:
1. Отключите электропитание контроллера расхода FB107.
2. Отсоедините от модуля провода (или съемные клеммные
3. Захватите модуль за рифленые края с обеих сторон и аккуратно
колодки).
его вытащите (см. рис. 4-3). Слегка сдвиньте крышку вперед,
чтобы освободить фиксатор модуля.
Рифленые края
Рис. 4-3. Рифленые края на модулях
4-6 Входы/выходы и вход терморезистора RTD Дата выпуска: февраль 2007 г.
Page 75

4. Осторожно извлеките модуль из объединительной панели,
затем извлеките его из базового блока или блока расширения.
4.4 Подключение модуля
Требования к подключению входов/выходов зависят от места и
области применения. Способы подключения входов/выходов
определяются требованиями регионального и государственного
законодательства, а также требованиями NEC. Для подключения
входов/выходов можно использовать кабель, уложенный
непосредственно в грунт, кабель в кабельном канале или подвесной
кабель.
Все модули ввода/вывода, узел ввода/вывода CPU и входы RTD
снабжены клеммными колодками, обеспечивающими удобное
подключение и обслуживание. К клеммным колодкам можно
присоединять провода сечением от 16 до 24 AWG.
Внимание!
Несоблюдение мер предосторожности, связанных с
электростатическими разрядами, таких как использование
заземленного браслета, может привести к сбросу процессора или
повреждению электронных компонентов.
FloBoss 107. Руководство по эксплуатации
Подсоединение провода к съемным клеммным панелям:
1. Удалите с конца провода изоляцию примерно на ¼ дюйма.
2. Вставьте оголенный конец провода в зажим под винтом клеммы.
3. Затяните винт. Следите за тем, чтобы не перетянуть его.
Во избежание короткого замыкания старайтесь уменьшить длину
оголенного провода. Для исключения натяжения провода должны
немного провисать.
Примечание: для подключения сигналов ввода/вывода
рекомендуется применять витую пару
4.5 Выбор типа входов/выходов
Выбрать тип входа или выхода можно при помощи программы
ROCLINK 800.
1. С помощью программы ROCLINK 800 выполните вход в
систему контроллера расхода FB107.
Дата выпуска: февраль 2007 г. Входы/выходы и вход терморезистора RTD 4-7
Page 76

FloBoss 107. Руководство по эксплуатации
Примечание: в программе ROCLINK 800 предусмотрено
2. Выберите I/O module (Модуль ввода/вывода). Данные под
изображением контроллера FB107 изменяются.
Примечание: на рисунке 4-5 показаны значения по умолчанию
диалоговое окно для контроллера FB107. В этом
окне наряду с различными вкладками содержится
изображение контроллера FB107 (см. рис. 4-4 и 4-
5). Выберите модуль FB107, а затем
сконфигурируйте его компоненты на вкладках.
для модуля ввода/вывода.
Рис. 4-4. Пользовательский интерфейс FloBoss 107 ROCLINK 800
4-8 Входы/выходы и вход терморезистора RTD Дата выпуска: февраль 2007 г.
Page 77

FloBoss 107. Руководство по эксплуатации
3. Перейдите на вкладку I/O Setup (Настройка входов/выходов).
Рис. 4-5. Настройка входов/выходов
4. Выберите тип входа/выхода.
5. Если выбраны аналоговые входы (AI), также выберите
параметр 250 Ohm Resistor Installed (Установлен резистор 250
Ом), если требуется использовать аналоговый вход в режиме
"токовой петли".
6. Нажмите Apply (Применить).
Примечание: убедитесь, что тип входов/выходов выбран до
4.6 Аналоговые входы (AI)
Аналоговые входы (AI) позволяют контролировать устройства с
вводом "токовая петля" и вводом напряжения. 12-разрядный
диапазон сигналов на входе АЦП соответствует значению от 0 до
100% EU (где 0% EU соответствует 643 отсчетам, 100% EU — 3220
отсчетам). Конфигурирование аналоговых входов выполняется при
помощи программы ROCLINK 800.
Примечания:
конфигурирования входов/выходов при помощи
программы ROCLINK 800.
Диагностические аналоговые входы типа E (логическое
напряжение, напряжение батареи, зарядка, ток системы в
миллиамперах и температура батареи) не предназначены для
конфигурирования или подключения.
При конфигурировании входа в качестве аналогового выберите
AI в качестве типа входов/выходов. См. Рис. 4-5.
Дата выпуска: февраль 2007 г. Входы/выходы и вход терморезистора RTD 4-9
Page 78

FloBoss 107. Руководство по эксплуатации
Каналы аналоговых входов (AI) являются масштабируемыми, но
обычно для них применяются следующие параметры:
Аналоговый сигнал 4-20 мА.
Сигнал 1-5 В пост. тока.
При необходимости можно откалибровать нижний предел
аналогового сигнала в нуль.
К клеммным колодкам можно присоединять провода сечением от
16 до 24 AWG.
4.6.1 Подключение аналоговых входов
Клеммы для подключения аналогового входа показаны на рисунках
4-6 и 4-7.
Клемма + соответствует положительному сигнальному входу,
клемма GND — общему сигнальному входу (−). На этих клеммы
допускается подавать сигналы с напряжением от 0 до 5 вольт.
Клемма GND соединена с общей шиной устройства, поэтому
каналы аналоговых входов можно использовать только в качестве
асимметричных. Для питания внешних устройств используется
клемма LOOP (Петля).
Подключение
выходов
"токовой петли"
Программа ROCLINK 800 позволяет сконфигурировать
дополнительный узел ввода/вывода модуля CPU для задания
значений напряжения "токовой петли" 10 или 24 В пост. тока.
Примечание: если напряжение на входе превышает напряжение
петли 10 В, напряжение петли выравнивается в
соответствии со входным напряжением. Например,
если на вход PWR IN подается 14 В пост. тока и
выбрана "петля" с напряжением 10 В, на выходе
"петли" будет напряжение 14 В пост. тока.
Модуль ввода/вывода поддерживает только напряжение "токовой
петли" 24 В постоянного тока. Узел ввода/вывода CPU использует
разъемы выхода "токовой петли" и заземления модуля CPU.
Выход "токовой петли" предназначен для устройств, которым
требуется электропитание 24 В постоянного тока с заземлением
(например, для датчиков Rosemount), что позволяет передавать на
контроллер расхода FB107 сигнал 4-20 мА в зависимости от
измеряемого давления, температуры, уровня и т.д.
Выход "токовой петли" с напряжением 10 В предназначен для
маломощных преобразователей с сигналом 1-5 В, а не 4-20 мА.
Ток "петли", равный 80 мА, рассчитан на питание двух внешних
устройств, подключенных к двум аналоговым входам контроллера.
4-10 Входы/выходы и вход терморезистора RTD Дата выпуска: февраль 2007 г.
Page 79

FloBoss 107. Руководство по эксплуатации
INTERNALLY
POWERED
Рис. 4-6. Выход "токовой петли" для дополнительного узла ввода/вывода на модуле CPU
INTERNALLY
POWERED
Рис. 4-7. Выход "токовой петли" для модуля ввода/вывода
Дата выпуска: февраль 2007 г. Входы/выходы и вход терморезистора RTD 4-11
Page 80

FloBoss 107. Руководство по эксплуатации
4.7 Аналоговые выходы (AO)
Аналоговые выходы (AO) обеспечивают выход источника тока 420 мА для питания устройств с аналоговыми выходами "токовая
петля". На аналоговые выходы подаются аналоговые сигналы,
генерируемые контроллером расхода FB107 для управления
оборудованием, например, регулирующими клапанами или
другими устройствами с аналоговым управлением. Аналоговый
выход содержит разъемы электропитания. На аналоговых выходах
используется 12-разрядный ЦАП со значениями по умолчанию от 0
до 3250 (0-100% EU).
Примечание: при конфигурировании входа в качестве аналогового
выберите AO в качестве типа входов/выходов. См.
Рис. 4-5.
4.7.1 Подключение аналоговых выходов
Аналоговый выход на разъемах модуля ввода/вывода
подключается следующим образом:
AO+ положительный
AO− общий
Примечание: убедитесь, что имеется возможность возбуждения
контуров заземления с помощью соединения общих
шин различных входов/выходов.
На Рис. 4-8 показано подключение аналогового выхода.
INTERNALLY
POWERED
Рис. 4-8. Подключение аналогового выхода
4-12 Входы/выходы и вход терморезистора RTD Дата выпуска: февраль 2007 г.
Page 81

4.8 Дискретные входы (DI)
Дискретный вход (DI) служит для контроля состояния реле,
бесконтактных переключателей с разомкнутым
коллектором/разомкнутым стоком и других устройств, имеющих
два возможных состояния. На дискретные входы могут подаваться
сигналы с реле, переключателей и других устройств,
генерирующих сигналы "вкл/выкл", "разомкнутый/замкнутый" или
"высокий/низкий уровень".
Дискретные входы обеспечивают напряжение питания для реле с
сухими контактами или для бесконтактных переключателей с
разомкнутым коллектором.
Любой канал дискретного ввода можно сконфигурировать для
работы в следующих режимах:
Стандартные дискретные входы.
Дискретные входы с регистром-защелкой.
Дискретные входы с регистром-защелкой остаются в активном
состоянии до выполнения сброса. Другие параметры можно
использовать для преобразования сигналов с внешних устройств и
сбора статистической информации о количестве переходных
состояний и общем времени нахождения во включенном и
выключенном состоянии.
FloBoss 107. Руководство по эксплуатации
Дискретные входы определяют низкий уровень напряжения и
выдают сигнал о том, что контакты реле замкнуты, на контроллер
FB107. При размыкании контактов напряжение возрастает,
дискретный вход выдает сигнал на контроллер FB107 о том, что
контакты реле разомкнуты. Максимальная частота считывания
данных с дискретного входа контроллером расхода FB107
составляет 20 раз в секунду (сканирование с интервалом 50
миллисекунд).
Если периферийное устройство (например, контакт реле или
разомкнутый коллектор) подсоединены к разъемам + и GND,
замыкание контакта приводит к замыканию цепи. При этом
возникает электрический ток, определяемый цепями дискретных
входов, которые, в свою очередь, выдают сигнал о том, что
контакты реле замкнуты, на контроллер FB107.
Примечание: при конфигурировании входа в качестве дискретного
выберите DI в качестве типа входов/выходов. См.
Рис. 4-5.
Дата выпуска: февраль 2007 г. Входы/выходы и вход терморезистора RTD 4-13
Page 82

FloBoss 107. Руководство по эксплуатации
4.8.1 Подключение дискретных входов
Клеммы для подключения дискретных выходов показаны на Рис.
4-9.
Клемма + соответствует положительному сигнальному входу,
клемма GND — общему сигнальному входу (−).
Функционирование дискретного входа выполняется при контакте,
замкнутом на клеммах + и GND. См. Рис. 4-9.
Примечание: убедитесь, что имеется возможность возбуждения
контуров заземления с помощью соединения общих
шин различных входов/выходов.
Внимание!
OPEN DRAIN TYPE
OPEN COLLECTOR DEVICE
EXTERNALLY POWERED
CONTACT-CLOSURE DEVICE
EXTERNALLY POWERED
Дискретный вход предназначен для работы только с несиловыми
дискретными устройствами, например, с реле с "сухими"
контактами, устройствами с разомкнутым коллектором или
изолированными бесконтактными переключателями.
Использование канала дискретного ввода с силовыми
устройствами может привести к сбоям в работе или
повреждению.
OR
OR
+
-
+
-
Рис. 4-9. Подключение дискретного входа
4-14 Входы/выходы и вход терморезистора RTD Дата выпуска: февраль 2007 г.
Page 83

4.9 Дискретные выходы (DO)
Дискретный выход (DO) подразумевает выходные сигналы,
имеющие два состояния, для подачи питания на бесконтактные
реле и на другие устройства, имеющие малые значения
электрической нагрузки.
Можно настроить дискретный выход для отправки импульса на
заданное устройство. Дискретные выходы с сигналами низкого и
высокого уровня применяются для включения и отключения
оборудования.
Цепь дискретного выхода оптически связана с целью изолирования
платы процессора от входного сигнала. См. Рис. 4-10.
Функции дискретных выходов:
Постоянные дискретные выходы.
Кратковременные дискретные выходы.
Переключаемый выход.
Время срабатывания выхода.
Канал дискретного выхода представляет собой нормально
разомкнутый переключатель на полевом транзисторе. Дискретный
выход представляет собой бесконтактный переключатель,
включаемый отдельными сигналами с линий входов/выходов
процессора и способный обрабатывать сигналы, максимальное
напряжение которых составляет 50 В пост. тока при силе тока 0,2 А.
FloBoss 107. Руководство по эксплуатации
Сконфигурируйте дискретный выход таким образом, чтобы после
сброса он сохранял последнее значение или был отключен. При
выполнении запроса на изменение состояния дискретного выхода
этот запрос немедленно передается на дискретный выход.
Интервал сканирования для проверки изменения состояния
дискретного выхода не используется.
Если дискретный выход находится в режиме кратковременного
изменения или переключения, можно задать значение
минимального интервала включения 50 миллисекунд (0,05
секунды).
Примечания:
При конфигурировании выхода в качестве дискретного
выберите DO в качестве типа входов/выходов. См. Рис. 4-5.
При использовании дискретного выхода для управления
индуктивной нагрузкой (например, катушкой реле),
подключите параллельно нагрузке подавляющий диод. Это
позволяет защитить дискретный выход от импульсов обратной
ЭДС, создаваемых при отключении индуктивной нагрузки.
Дата выпуска: февраль 2007 г. Входы/выходы и вход терморезистора RTD 4-15
Page 84

FloBoss 107. Руководство по эксплуатации
4.9.1 Подключение дискретных выходов
Клеммы для подключения дискретных выходов показаны на Рис.
4-10. Клемма “+” соответствует стороне высокого напряжения,
клемма “–” — стороне низкого напряжения.
Примечание: убедитесь, что имеется возможность возбуждения
контуров заземления с помощью соединения общих
шин различных входов/выходов.
Внимание!
Дискретный выход (DO) предназначен для работы только с
несиловыми цифровыми устройствами, например, с катушками
реле или бесконтактными переключателями. Использование
дискретных выходов с силовыми устройствами может привести
к сбоям в работе или повреждению.
+
-
INTERNAL
CONTROL
Рис. 4-10. Дискретные выходы
4.10 Импульсные входы (PI)
Импульсные входы (PI) обрабатывают сигналы с устройств,
генерирующих импульсы, и предоставляют вычисленное значение
или общее количество за определенный период. Цепи импульсных
входов контроллера расхода FB107 физически соответствуют
дискретных входам. Импульсный вход соединен с импульсным
сумматором, в котором выполняется подсчет импульсов.
4-16 Входы/выходы и вход терморезистора RTD Дата выпуска: февраль 2007 г.
Page 85

FloBoss 107. Руководство по эксплуатации
Импульсные входы в основном используются для связи с
бесконтактными устройствами с разомкнутым
коллектором/разомкнутым стоком. Можно использовать
импульсные входы для взаимодействия с устройствами, имеющими
собственный источник питания, или с устройствами,
запитываемыми от FB107.
Допустимый диапазон уровней напряжения на импульсных входах
составляет от 0,5 В пост. тока (низкий уровень) до 1,5 В пост. тока
(высокий уровень).
Внимание!
Импульсный вход предназначен для работы только с
несиловыми устройствами, например, с реле с "сухими"
контактами или изолированными бесконтактными
переключателями. Использование импульсного входа с
силовыми устройствами может привести к сбоям в работе или
повреждению.
Примечание: при конфигурировании входа в качестве
импульсного выберите PI в качестве типа
входов/выходов. См. Рис. 4-5.
4.10.1 Подключение импульсных входов
На рисунке 4-11 показаны клеммы подключения импульсного
входа. Клемма + соответствует положительному напряжению,
клемма GND — общей линии.
Для использования канала в качестве импульсного входа,
подключите провода + и GND от периферийного устройства к
клеммам PI1+ или PI2+ и GND.
Примечание: убедитесь, что имеется возможность возбуждения
контуров заземления с помощью соединения общих
шин различных входов/выходов.
Дата выпуска: февраль 2007 г. Входы/выходы и вход терморезистора RTD 4-17
Page 86

FloBoss 107. Руководство по эксплуатации
INTERNALLY
POWERED
Рис. 4-11. Подключение импульсных входов
4.11 Вход терморезистора (RTD)
Терморезистор (RTD) на модуле CPU контролирует сигнал
температуры, подаваемый с датчика RTD. Вход RTD можно
настроить в соответствии с трех- или четырехпроводным датчиком
RTD. Диапазон измерений RTD — от −40 до 400°C (−40 - 752°F).
Клеммы RTD обозначены на модуле CPU меткой “RTD”.
Активным элементом пробника RTD является точный,
термозависимый резистор, выполненный из сплава платины.
Резистор характеризуется прогнозируемым положительным
температурным коэффициентом сопротивления, то есть его
сопротивление возрастает при увеличении температуры. Со входа
RTD на пробник подается малый ток, а затем измеряется падение
напряжения на пробнике. Микропрограмма контроллера FB107
преобразует сигнал в значение температуры на основе
характеристики напряжения RTD.
Вход RTD запитывается с линий питания на объединительной
панели.
Перед подключением к внешним цепям этот вход рекомендуется
откалибровать. Если подключение контроллера FB107 и RTD
выполнено достаточно давно и вносит значительные помехи, также
следует выполнить калибровку. (В соответствии с диаграммами
RTD изменение на 0,23 Ом соответствует изменению на 1°F.)
4-18 Входы/выходы и вход терморезистора RTD Дата выпуска: февраль 2007 г.
Page 87

Во время эксплуатации модуль RTD считывает данные один раз в
секунду. Значение, полученное с модуля RTD, линеаризуется, а
затем передается на обработку в качестве аналогового входного
сигнала. Затем оно преобразуется в инженерные единицы
измерения, и выполняется проверка аварийного сигнала.
4.11.1 Подключение входа RTD
Данные о температуре можно получать с пробника терморезистора
(RTD). Температурный пробник RTD монтируется
непосредственно в трубопроводе с использованием чехла
термопары. С помощью терморезистора RTD измеряется
температура среды в трубопроводе.
Жилы RTD следует защитить металлической оболочкой или
разместить их в кабельном канале с помощью герметичных
фитингов кабельных каналов. Сигнал RTD контролируется 16разрядным АЦП, затем он считывается микропроцессором.
Контроллер FB107 имеет клеммы для четырехпроводного
резистора RTD из платинового сплава с сопротивлением 100 Ом и
коэффициентом передачи по току 0,00385Ω/°C.
FloBoss 107. Руководство по эксплуатации
Подключать пробник RTD к контроллеру FB107 необходимо с
помощью провода в металлической оплетке, для предотвращения
образования контура заземления оплетка провода должна быть
заземлена на одном конце. Контуры заземления могут привести к
ошибкам в сигнале на входе RTD.
Примечание: убедитесь, что имеется возможность возбуждения
контуров заземления с помощью соединения общих
шин различных входов/выходов.
В Табл. 4-3 показаны условия подключения к клеммам
терморезистора RTD и к 3-проводной перемычке. На рис. 4-12
показано подключение сенсора RTD.
Табл. 4-3. Подключение терморезистора RTD
Клемма Цвет
провода
SRC Красный Положительный вход, ток
источника сигнала
+ Красный + RTD + RTD + RTD
Назначение 4-
проводны
й RTD
SRC SRC
3-проводный
RTD
−
GND Белый Отрицательное замыкание через
Дата выпуска: февраль 2007 г. Входы/выходы и вход терморезистора RTD 4-19
Белый – RTD – RTD – RTD
GND Перемычка
землю
Примечание: цвета проводов для RTD могут отличаться.
GND на – RTD
Page 88

FloBoss 107. Руководство по эксплуатации
КРАСНЫЙ
КРАСНЫЙ
БЕЛЫЙ
БЕЛЫЙ
КРАСНЫЙ
КРАСНЫЙ
БЕЛЫЙ
Перемычка
Рис. 4-12. Подключение сенсора RTD
4-20 Входы/выходы и вход терморезистора RTD Дата выпуска: февраль 2007 г.
Page 89

Глава 5 – Передача данных
Контроллер FB107 обменивается данными с внешними
устройствами через порт локального интерфейса оператора (LOI),
порты COM1 EIA-485 (RS-485), COM2 EIA-232 (RS-232) или
(дополнительно) через порт COM3 при помощи
коммуникационного модуля.
Оконечные устройства и коммуникационные модули обеспечивают
передачу данных между контроллером FB107 и управляющей
системой или внешними устройствами. Коммуникационные
модули устанавливаются непосредственно на объединительной
панели FB107, при их установке активизируется управляющий
порт.
Содержание
5.1 Обзор передачи данных................................................................... 5-1
5.2 Установка/Удаление коммуникационного модуля .........................5-4
5.3 Подключение порта локального интерфейса оператора (LOI)..... 5-5
5.3.1 Использование LOI ..............................................................5-6
5.4 Подключение передачи данных EIA-485 (RS-485).........................5-7
5.5 Подключение передачи данных EIA-232 (RS-232).........................5-8
5.6 Подключение ЖК-дисплея ...............................................................5-9
FloBoss 107. Руководство по эксплуатации
5.1 Обзор передачи данных
Модуль CPU контроллера FB107 содержит три встроенных порта
передачи данных. В слот 1 базового блока можно добавить один
коммуникационный модуль.
Дата выпуска: февраль 2007 г. Передача данных 5-1
Page 90

FloBoss 107. Руководство по эксплуатации
A
Рис. 5-1. Коммуникационный модуль EIA-232
(RS-232)
Рис. 5-2. Коммуникационный модуль EIA-485
(RS-485)
LOI − Локальный порт
-232 (RS-232)
EI
COM1 − EIA-485
(RS-485)
COM2 − По
умолчанию EIA232 (RS-232)
Рис. 5-3. CPU
5-2 Передача данных Дата выпуска: февраль 2007 г.
Page 91

FloBoss 107. Руководство по эксплуатации
Контроллер расхода FB107 поддерживает до четырех портов
передачи данных, включая:
Порт локального интерфейса оператора (RS-232C) – LOI для
асинхронной последовательной передачи данных через разъем
DB9. По умолчанию для LOI заданы следующие параметры:
скорость передачи данных — 19200 Кбит/с, 8 битов данных, без
контроля четности, 1 стоповый бит.
Примечание: Локальный порт на модуле CPU отмечен меткой
LOI.
EIA-485 (RS-485) – COM1 для асинхронной последовательной
передачи данных. Стандартный порт для передачи различных
данных на расстояния до 1220 м. Стандарт EIA-485 (RS-485)
обеспечивает последовательную асинхронную передачу данных
на большие расстояния от "точки" к нескольким устройствам
последовательной сети по экономичным кабелям с витой парой.
По умолчанию для EIA-485 (RS-485) заданы следующие
параметры: скорость передачи данных — 19200 Кбит/с, 8 битов
данных, без контроля четности, 1 стоповый бит.
Примечание: на блоке CPU порт COM1 отмечен меткой 485.
EIA-232 (RS-232) – По умолчанию COM2 для
последовательной передачи данных. Стандартный порт для
передачи различных данных на расстояния до 15 м. Стандарт
EIA-232 (RS-232) обеспечивает прямую асинхронную передачу
данных. На основе стандарта EIA-232 (RS-232) можно создать
физический интерфейс, обеспечивающий подключение
устройств последовательной передачи данных, таких как
хроматографические газоанализаторы и радиопередатчики. По
умолчанию для EIA-232 (RS-232) заданы следующие параметры:
скорость передачи данных — 19200 Кбит/с, 8 битов данных, без
контроля четности, 1 стоповый бит.
Примечания:
Порт COM2 распложен на модуле CPU.
При установке в слот 2 коммуникационного модуля
микропрограмма перенаправляет порт передачи данных
(COM2) модуля CPU в соответствии с типом модуля,
установленного в слоте 2. Порт COM2 следует
конфигурировать в соответствии с типом
коммуникационного модуля, установленного в слоте 2.
Дополнительные коммуникационные модули – Порт COM3
обеспечивает передачу данных по стандартам EIA-232 (RS-232)
и EIA-485 (RS-485). Этот порт расположен на
коммуникационном модуле.
Дата выпуска: февраль 2007 г. Передача данных 5-3
Page 92

FloBoss 107. Руководство по эксплуатации
Примечание: порт COM3 активируется только в случае, если в
Конфигурация модулей выполняется в программе ROCLINK 800.
Коммуникационные модули используют отдельные
асимметричные каналы. Защита электронных схем модуля
осуществляется с помощью эксплуатационного интерфейса. Для
уменьшения влияния помех, приводящих к ошибкам при передаче
данных, в каждом модуле применяется фильтрация.
Для отображения сигналов RX (прием) и TX (передача) по
интерфейсу EIA-232 (RS-232) используются индикаторы.
Индикаторы показывают сигналы A (передача/прием+) и B
(передача/прием −) для интерфейса EIA-485 (RS-485).
Контроллер FB107 может обмениваться данными с другими
устройствами по протоколам ROC или Modbus. Микропрограмма
может автоматически определять эти два протокола (ROC или
Modbus) со скоростями передачи данных до 115,2 Кбит/с.
слот 1 установлен коммуникационный модуль.
Протокол ROC поддерживает последовательную передачу данных
на локальные или удаленные устройства, например, на
управляющий компьютер.
Контроллер расхода FB107 может выступать в качестве ведущего
или ведомого устройства Modbus и использовать режим
удаленного терминала (RTU) или формат Американского
стандартного кода для обмена данными (ASCII). Благодаря этому
контроллер FB107 можно легко интегрировать в другие системы.
Расширения протокола Modbus позволяют передавать данные
архивов, журнала событий и журнала аварийных сообщений в
приложения электронного измерения расхода (EFM).
Примечание: порт LOI поддерживает только подчиненные
протоколы ROC или Modbus.
5.2 Установка/Удаление коммуникационного модуля
Конструкция всех модулей контроллера расхода FB107
обеспечивает простоту их установки и удаления. См. разделы
"Установка модуля", "Удаление модуля" и "Подключение модуля" в
главе 4 "Входы/выходы и входы терморезистора RTD".
Коммуникационные модули можно устанавливать в слоты 1 или 2
базового блока, с которого на эти модули подается электропитание
и управляющие сигналы.
5-4 Передача данных Дата выпуска: февраль 2007 г.
Page 93

FloBoss 107. Руководство по эксплуатации
Слот 1
Слот 2
При установке коммуникационного модуля в слот 1 базового
блока контроллера активизируется порт COM3. COM2 остается
без изменений; этот порт по-прежнему находится на модуле CPU.
Порт COM3 является полностью независимым от других портов
передачи данных.
Примечание: если в слот 1 установлен коммуникационный модуль,
модуль ввода/вывода можно установить в слот 7.
При этом обеспечивается полный комплект из 42
точек ввода/вывода и четырех портов передачи
данных.
Установка коммуникационного модуля в слот 2 на базовом блоке
приводит к отключению порта COM2 на модуле CPU и
перенаправлении COM2 на вновь установленный
коммуникационный модуль. Порт COM2 существует всегда.
Примечание: при установке в слот 2 коммуникационного модуля
микропрограмма перенаправляет порт передачи
данных (COM2) модуля CPU в соответствии с типом
модуля, установленного в слоте 2. Порт COM2 следует
конфигурировать в соответствии с типом
коммуникационного модуля, установленного в слоте 2.
Оборудование определяет, какие сигналы использовать в
зависимости от наличия в слоте 2 коммуникационного модуля.
Параметры других портов передачи данных не изменяются.
5.3 Подключение порта локального интерфейса оператора (LOI)
Порт локального интерфейса оператора (LOI) предназначен для
прямой локальной связи контроллера расхода FB107 и
персонального компьютера с помощью кабеля локального
интерфейса оператора с разъемом EIA-232 (RS-232C).
Примечание: кабель LOI можно приобрести у регионального
торгового представителя.
Значения по умолчанию для порта LOI: скорость передачи 19200
бит/с, 8 битов данных, 1 стоповый бит, без проверки четности,
задержка включения 10 мс, задержка отключения 10 мс.
Максимальная скорость передачи составляет 115,2 Кбит/с.
Локальный порт LOI обеспечивает доступ к контроллеру расхода
FB107 для выполнения его конфигурации и передачи сохраненных
данных. Порт LOI поддерживает создание сообщений аварийной
сигнализации непосредственных отчетов по методу исключения
(SRBX).
Дата выпуска: февраль 2007 г. Передача данных 5-5
Page 94

FloBoss 107. Руководство по эксплуатации
LOI использует локальный порт в программе ROCLINK 800.
Терминал LOI на модуле CPU обеспечивает возможность
подключения к встроенному последовательному интерфейсу
EIA-232 (RS-232C). LOI — программно-настраиваемый интерфейс
со скоростью передачи от 300 до 115200 бит/с, используется
разъем DB9.
Для отображения сигналов RX (прием) и TX (передача) по
интерфейсу EIA-232 (RS-232) используются индикаторы.
LOI поддерживает обмен данными по подчиненным протоколам
ROC или Modbus. Интерфейс LOI также поддерживает защиту
входа в контроллер FB107, если защита LOI включена при помощи
ROCLINK 800.
В Табл. 5-1 показана разводка сигналов для модуля CPU и ПК.
Выход передачи (TX) интерфейса EIA-232 (RS-232) контроллера
FB107 подсоединяется ко входу (RX) ПК.
Табл. 5-1. Подключение кабеля нуль-модема для порта LOI
LOI на
контр-
оллере
FB107
TX
(перед-
ача)
RX
(прием)
GND
(зазем-
ление)
DB9 на
контр-
оллере
2 TX
3 RX
5 GND
FB107
ПК
(Перед
ача)
(прием)
(заземл
ение)
5.3.1 Использование LOI
1. Подсоедините кабель LOI к разъему LOI в верхней части
базового блока контроллера FB107.
2. Подсоедините кабель LOI к COM-порту ПК.
3. Запустите программу ROCLINK 800 и зарегистрируйтесь в ней.
4. Нажмите значок Direct Connect (Прямое соединение).
5. Сконфигурируйте передачу данных для других встроенных и
подключенных коммуникационных модулей, модулей
ввода/вывода, параметры измерительных приборов AGA и
другие параметры.
5-6 Передача данных Дата выпуска: февраль 2007 г.
Page 95

FloBoss 107. Руководство по эксплуатации
5.4 Подключение передачи данных EIA-485 (RS-485)
Передача данных EIA-485 предусматривает передачу сигналов по
стандарту RS-485 на следующие устройства:
Порт COM1 находится на модуле CPU (отмечен меткой 485).
Порт COM2 расположен на модуле CPU, если в слот 2
установлен коммуникационный модуль.
Порт COM3 расположен на коммуникационном модуле EIA-
485 (RS-485), установленном в слот 1.
В Табл. 5-2 показаны точки подключения для интерфейса передачи
данных EIA-485 (RS-485).
Последовательный протокол связи EIA-485 (RS-485) со скоростью
передачи данных от 300 до 115200 Кбит/с обеспечивает
стандартную передачу различных данных на расстояние до 1220
метров. Драйверы EIA-485 (RS-485) предназначены для
многоточечных приложений с несколькими устройствами,
подключенными к одной шине.
Интерфейс EIA-485 (RS-485) поддерживает функцию защиты
входа в систему контроллера FB107, если защита на порту
передачи данных включена при помощи ROCLINK 800.
Индикаторы показывают сигналы A (передача/прием+) и B
(передача/прием −) для интерфейса EIA-485 (RS-485).
Значения по умолчанию для коммуникационных модулей EIA-485
(RS-485): скорость передачи 19200 бит/с, 8 битов данных, 1
стоповый бит, без проверки четности, задержка включения 10 мс,
задержка отключения 10 мс. Максимальная скорость передачи
составляет 115,2 Кбит/с.
Подключение выполняется с помощью витой пары. Клеммы и их
назначение: контакт 1 — клемма A, контакт 2 — клемма B.
Подсоедините A на контроллере расхода FB107 к клемме A или “+”,
подсоедините B на контроллере FB107 к клемме B или “−”. При
возникновении сложностей в установлении связи попробуйте
поменять местами контакты.
Примечание: стандарт EIA-485 (RS-485) предполагает установку в
конце линии согласующего резистора. Номинал
согласующего резистора должен соответствовать
полному сопротивлению кабеля (120 Ω для витой
пары).
Дата выпуска: февраль 2007 г. Передача данных 5-7
Page 96

FloBoss 107. Руководство по эксплуатации
Табл. 5-2. Клеммы подключения EIA-485 (RS-485)
Метка Описание
A Передача / Прием +
B
NC Не подключено (только для
NC Не подключено (только для
NC Не подключено (только для
GND
(зазем-
ление)
Передача / Прием −
коммуникационного модуля)
коммуникационного модуля)
коммуникационного модуля)
Земля (общий)
5.5 Подключение передачи данных EIA-232 (RS-232)
Передача данных по интерфейсу EIA-232 соответствует
спецификациям EIA-232 для асимметричной асинхронной
передачи данных по протоколу RS-232 на расстояние до 15 м. В
Табл. 5-3 показаны точки подключения для интерфейса передачи
данных EIA-232 (RS-232).
Передача данных EIA-232 предусматривает передачу сигналов по
протоколу RS-232 на следующие устройства:
Порт LOI распложен на модуле CPU.
Порт COM2 расположен на модуле CPU.
Порт COM3 расположен на коммуникационном модуле EIA-
232 (RS-232), установленном в слот 1.
EIA-232 (RS-232) использует прямую асинхронную
последовательную передачу данных и обеспечивает физический
интерфейс для подключения к контроллеру расхода FB107 таких
устройств, как хроматографические газоанализаторы и
радиопередатчики. Передача данных по интерфейсу EIA-232
(RS-232) выполняется по линиям с квитированием и готовностью к
отправке (RTS).
Значения по умолчанию для EIA-232 (RS-232): скорость передачи
19200 бит/с, 8 битов данных, 1 стоповый бит, без проверки
четности, задержка включения 10 мс, задержка отключения 10 мс.
Максимальная скорость передачи составляет 115,2 Кбит/с.
Интерфейс EIA-232 (RS-232 поддерживает функцию защиты входа
в систему контроллера FB107, если защита на порту передачи
данных включена при помощи ROCLINK 800.
В интерфейсе EIA-232 (RS-232) используются сигналы RX, TX и
сигналы RTS линий управления. Светодиодные индикаторы (LED)
служат для индикации передачи (TX) или приема (RX)
контроллера FB107.
5-8 Передача данных Дата выпуска: февраль 2007 г.
Page 97

Табл. 5-3. Клеммы подключения EIA-232 (RS-232) Табл. 5-3.
Клеммы подключения EIA-232 (RS-232)
Метка Определение
TX
(передача)
RX
(прием)
RTS Сигналы Ready to Send (Готовность к пересылке),
NC Не подключено (только для коммуникационного модуля)
NC Не подключено (только для коммуникационного модуля)
GND
(заземле-
ние)
Передача сигналов о том, что данные переданы через
порт
Прием сигналов о том, что данные получены через порт
сообщающие, что порт готов для передачи данных
Земля (общий)
5.6 Подключение ЖК-дисплея
Базовый блок FB107 содержит разъемы для
жидкокристаллического дисплея (см. Рис. 5-4). Дисплей действует
в качестве коммуникационного устройства EIA-232 (RS-232) и
поддерживает подчиненный протоколы связи ROC или Modbus.
FloBoss 107. Руководство по эксплуатации
Значения по умолчанию для ЖК-дисплея: скорость передачи
данных 19200 бит/с, 8 битов данных, 1 стоповый бит, без контроля
четности. Максимальная скорость передачи — 57,6 Кбит/с.
Рис. 5-4. Подключение дисплея к базовому блоку
Табл. 5-4. Подключение ЖК-дисплея
Метка Функция
1
2
3
4
Вывод электропитания
Заземление
Передача (TX) с FB107
Прием (RX) на FB107
Дата выпуска: февраль 2007 г. Передача данных 5-9
Page 98

FloBoss 107. Руководство по эксплуатации
5-10 Передача данных Дата выпуска: февраль 2007 г.
Page 99

FloBoss 107. Руководство по эксплуатации
Глава 6 – Многопараметрический сенсор (MVS)
Модуль многопараметрического сенсора (MVS) обеспечивает
получение точных входных данных по сигналам статического
давления, перепада давления и температуры для контроллеров
FB107. Эти данные необходимы для вычисления расхода
методом переменного перепада давления.
Содержание
6.1 Обзор модуля MVS ...........................................................................6-1
6.2 Установка и удаление модуля MVS ................................................. 6-4
6.3 Конфигурирование группы модулей MVS .......................................6-4
6.4 Молниезащита модуля MVS.............................................................6-7
6.1 Обзор модуля MVS
Модуль MVS обеспечивает обмен данных и электропитание
для удаленных датчиков MVS. В контроллер расхода FB107
можно установить только один модуль MVS.
Модуль MVS содержит электронные компоненты интерфейса
между контроллером расхода FB107 и MVS. Электронные
компоненты интерфейса управляют передачей данных от
модуля сенсора, обеспечивают масштабирование переменных
процесса, применяются при калибровке, хранят рабочие
параметры, выполняют преобразование протоколов и
отвечают на запросы, посылаемые с контроллера FB107.
Модуль MVS обеспечивает интерфейс передачи данных и
электропитание с ограничением тока короткого замыкания для
шести датчиков MVS.
Модуль MVS можно установить в любой слот контроллера
FB107 и блока расширения, за исключением слота 0, в
котором находится модуль CPU.
В схеме подключения группы устройств контроллер расхода
FB107 допускает подключение шести датчиков MVS к своей
шине обмена данных. Необходимо задать адрес каждого
датчика MVS до подключения группы устройств MVS. Для
нормальной работы нескольких устройств MVS необходимо,
чтобы каждое устройство MVS имело уникальный адрес (в
диапазоне 1—239). Нельзя использовать адреса 0 или 240.
Дата выпуска: февраль 2007 г. Многопараметрический сенсор (MVS) 6-1
Page 100

FloBoss 107. Руководство по эксплуатации
Примечание: значения MVS задаются в диалоговом окне
После задания уникальных адресов для всех устройств MVS
подсоедините несколько блоков MVS. Единственным
требованием при подключении нескольких устройств является
необходимость соединения аналогичных контактов устройств.
Это означает, что следует выполнить электрическое
соединение контактов “A” на устройствах с контактом “A” на
контроллере FB107 и т.п.
Удаленные MVS можно подключать последовательно. См.
раздел Рис. 6-1.
Модули MVS для удобства подключения и обслуживания
оборудованы съемными клеммными колодками. К клеммным
колодкам можно присоединять провода сечением от 16 до 24
AWG.
MVS Sensor (Многопараметрический сенсор)
программы ROCLINK 800 (Configure > I/O >
MVS Sensor) (Настройка - Ввод/Вывод -
Многопараметрический сенсор).
Каждую секунду контроллер FB107 сканирует все датчики
MVS, считывая значения дифференциального давления,
статического давления и температурыкоторые подаются на
вход контроллера для вычисления расхода жидкости или газа,
архивирования данных, проведения калибровочных операций
и создания аварийных сообщений.
Каждое входное устройство использует единицы измерения,
соответствующие выбранной системе мер:
Единицы
измерения
статического
давления
psi
(фунт/дюйм2)
Единицы
измерения
температуры
Градусы по
Фаренгейту
Градусы
Цельсия
Британские
единицы
измерения
Метрические
единицы
измерения
Единицы измерения
дифференциального
давления
O (дюймы
in H
2
водяного столба)
кПа кПа
6-2 Многопараметрический сенсор (MVS) Дата выпуска: февраль 2007 г.
 Loading...
Loading...