

Page 1
Kurzanleitung
Quadrocopter „Shadow 2.0“ RTF
www.conrad.com
Version 10/16
Best.-Nr. 1400004
Die Komplettanleitung zum Produkt können Sie über den Link www.conrad.com/downloads herun-
terladen. Befolgen Sie die Anweisungen auf der Webseite.
Vorbereiten des Quadrocopters
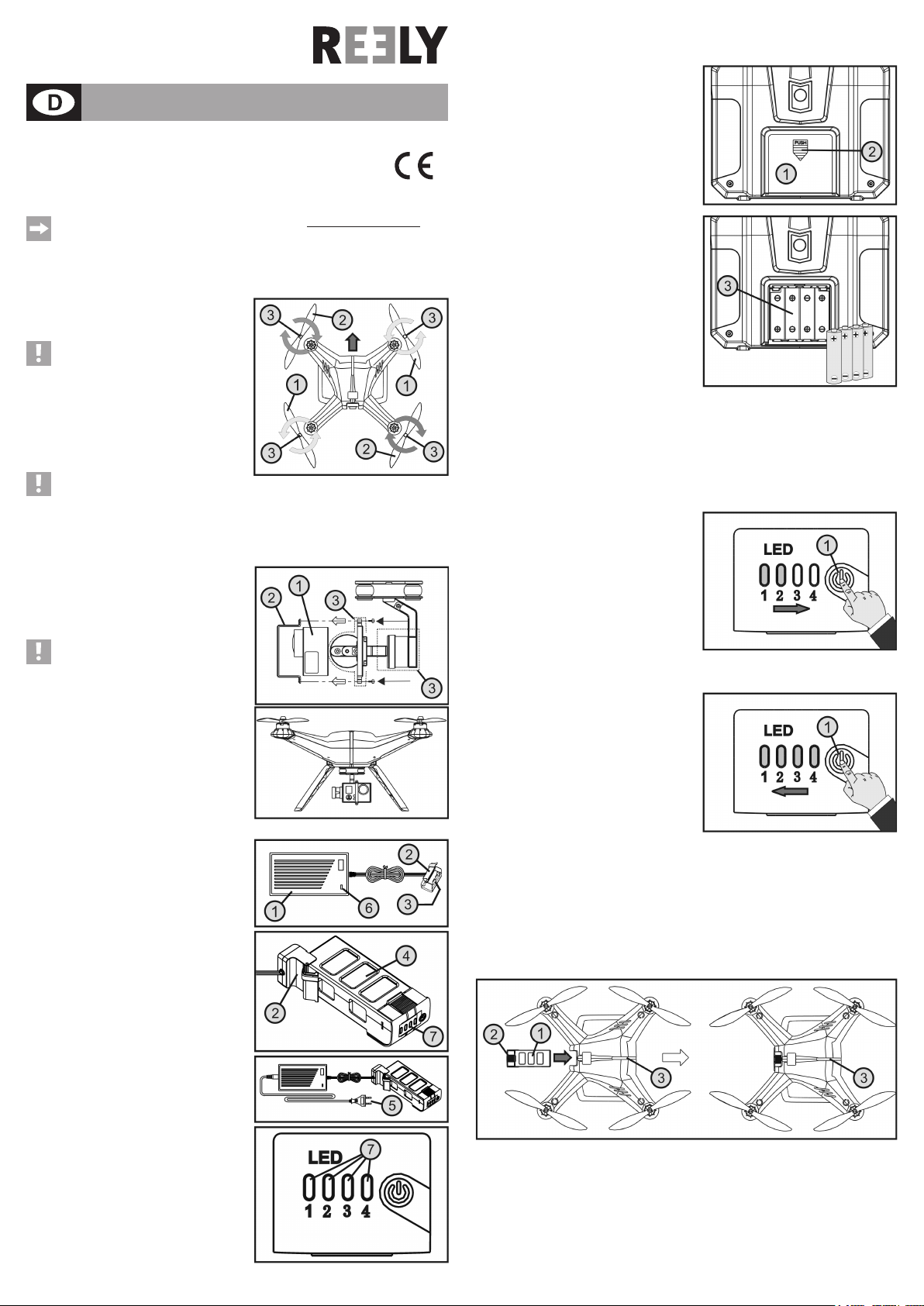
Montage der Propeller
Dem Quadrocopter liegt jeweils 1 Paar linksdrehende
Propeller (1) und 1 Paar rechtsdrehende Propeller (2)
bei.
Wichtig!
Achten Sie bei der Montage auf die Drehrich-
tung der Propeller. Die Propeller vorne links
und hinten rechts drehen sich von oben gesehen im Uhrzeigersinn und die Propeller vorne
rechts und hinten links drehen sich entgegen
dem Uhrzeigersinn.
Der Pfeil in der oberen Bildhälfte zeigt die Flugrichtung
des Modells nach vorne an.
Die Propeller verfügen über eingeklebte Befes-
tigungsmuttern (siehe Bild 1, Pos. 3), die sich
beim Betrieb selbst festziehen.
Um die Propeller zu befestigen, setzen Sie die jeweiligen Propeller auf die Gewinde der Motorwel-
len und drehen Sie die Propeller mit einer Hand entgegen der normalen Betriebs-Drehrichtung fest.
Halten Sie dabei mit der anderen Hand die Glocke des Brushless-Motors fest.
Stabilisierte Kamerahalterung (2 D-Gimbal)
Um eine Kamera vom Typ GoPro oder andere baugleiche Kameras (1) zu montieren, muss der Haltebügel (2)
entfernt und nach dem Einsetzen der Kamera wieder
mit den beiden M2 x 5 Schrauben befestigt werden.
Achtung wichtig!
Die beiden durchsichtigen Kunststoff-Abde-
ckungen (3) dienen lediglich zum Schutz des
Gimbals beim Transport des Quadrocopters.
Die Abdeckungen müssen vor dem Einsetzen
des Flugakkus bzw. der Kamera unbedingt entfernt werden.
Betreiben Sie die Kamerahalterung niemals
ohne eingebaute Kamera.
Durch das fehlende Gewicht der Kamera ist
die Halterung nicht ausbalanciert, wodurch die
Regelelektronik übermäßig belastet wird und
Schaden nehmen kann.
Laden des Flugakkus
Der 3zellige Flugakku wird mit Hilfe des mitgelieferten
Netzteils (1) aufgeladen. Klappen Sie dazu die Abdeckung des Ladeadapters (2) auf, sodass die beiden
großen Ladekontakte (3) zu sehen sind.
Schließen Sie den Flugakku (4) entsprechend den beiden mittleren Abbildungen in Bild 3 am Ladeadapter an.
Nachdem Sie das mitgelieferte Netzkabel am Netzteil
angesteckt haben, stecken Sie den Netzstecker (5) in
eine ordnungsgemäße Netzsteckdose des öffentlichen
Versorgungsnetzes.
Die Kontroll-Leuchte am Netzteil leuchtet rot und signalisiert Ihnen dadurch den Ladevorgang. Gleichzeitig
zeigen Ihnen die vier LEDs am Flugakku (7) den aktuellen Ladezustand an.
Bei entladenem Flugakku leuchtet nur die LED 1. Mit
zunehmender Akkuladung beginnt die LED 2 zunächst
zu blinken und später dauerhaft zu leuchten. Diese
Anzeige ndet bei fortlaufender Ladung auch bei LED
3 und LED 4 statt. Vor Beendigung des Ladevorgangs
leuchten alle 4 LEDs dauerhaft.
Wenn der Flugakku voll aufgeladen ist, erlöschen die
vier LEDs am Flugakku (7) und die Kontrollanzeige am
Netzteil (6) leuchtet grün.
Wenn der Ladevorgang abgeschlossen ist, trennen Sie
den geladenen Flugakku vom Ladeadapter und ziehen
Sie den Netzstecker aus der Netzsteckdose.
Bild 1
Bild 2
Inbetriebnahme des Senders
Einlegen der Batterien
Der Batteriefachdeckel (1) bendet sich auf der Rückseite des Senders. Drücken Sie auf die geriffelte Fläche
(2) und schieben den Deckel nach unten ab.
Beachten Sie beim Einsetzen der 4 Batterien die richtige Polung der Zellen. Ein entsprechender Hinweis (3)
bendet sich am Boden des Batteriefaches.
Bild 4
Inbetriebnahme des Quadrocopters
Ein-/Ausschalt-Funktion des Flugakkus prüfen
Bevor Sie den Flugakku in den Quadrocopter einsetzen, sollten Sie die Ein- und Ausschalt-Funktion der
Elektronik im Flugakku prüfen.
Einschalten
Um den Flugakku einzuschalten, drücken Sie kurz den
Ein-/Aus-Taster (1) am Flugakku und lassen ihn sofort
wieder los. Bei voll aufgeladenem Flugakku beginnen
die vier LEDs des Flugakkus zu leuchten.
Drücken Sie nun den Ein-/Aus-Taster (1) erneut und
halten ihn niedergedrückt. Die vier LEDs erlöschen und
beginnen nacheinander (LED 1 bis LED 4) wieder zu
leuchten.
Wenn alle vier LEDs leuchten, lassen Sie den Taster
wieder los. Der Flugakku ist nun eingeschaltet und an
den Akkukontakten liegt die Spannung an.
Ausschalten
Drücken Sie bei eingeschaltetem Flugakku kurz den
Ein-/Aus-Taster (1) am Flugakku und lassen ihn sofort
wieder los. Die vier LEDs des Flugakkus beginnen drei
Mal zu blinken.
Während dieser Zeit drücken Sie den Ein-/Aus-Taster
(1) erneut und halten ihn niedergedrückt. Die vier LEDs
leuchten und erlöschen nacheinander (LED 4 bis LED
1).
Wenn die LED 1 auch erloschen ist, lassen Sie den Tas-
ter wieder los. Der Flugakku ist nun ausgeschaltet und
die Akkukontakte sind spannungslos.
Einsetzen des Flugakkus in den Quadrocopter
Bevor Sie den Flugakku in den Quadrocopter einsetzen, drücken Sie kurz den Ein-/Aus-Taster am Flugakku.
Alle vier LEDs müssen zwei Sekunden lang leuchten.
Schieben Sie den ausgeschalteten Flugakku (siehe Bild 7, Pos.1) mit den Lade-Anschlusskontakten voraus
in den Quadrocopter. Drücken Sie leicht auf die geriffelte Fläche der Akkuverriegelung (siehe Bild 7, Pos. 2),
damit die Verriegelungsnase einrasten kann.
Wenn der Flugakku im Quadrocopter eingeschoben und korrekt verriegelt ist, schalten Sie den Sender und
anschließend den Flugakku ein.
Bild 5
Bild 6
Bild 7
Bild 3
Page 2
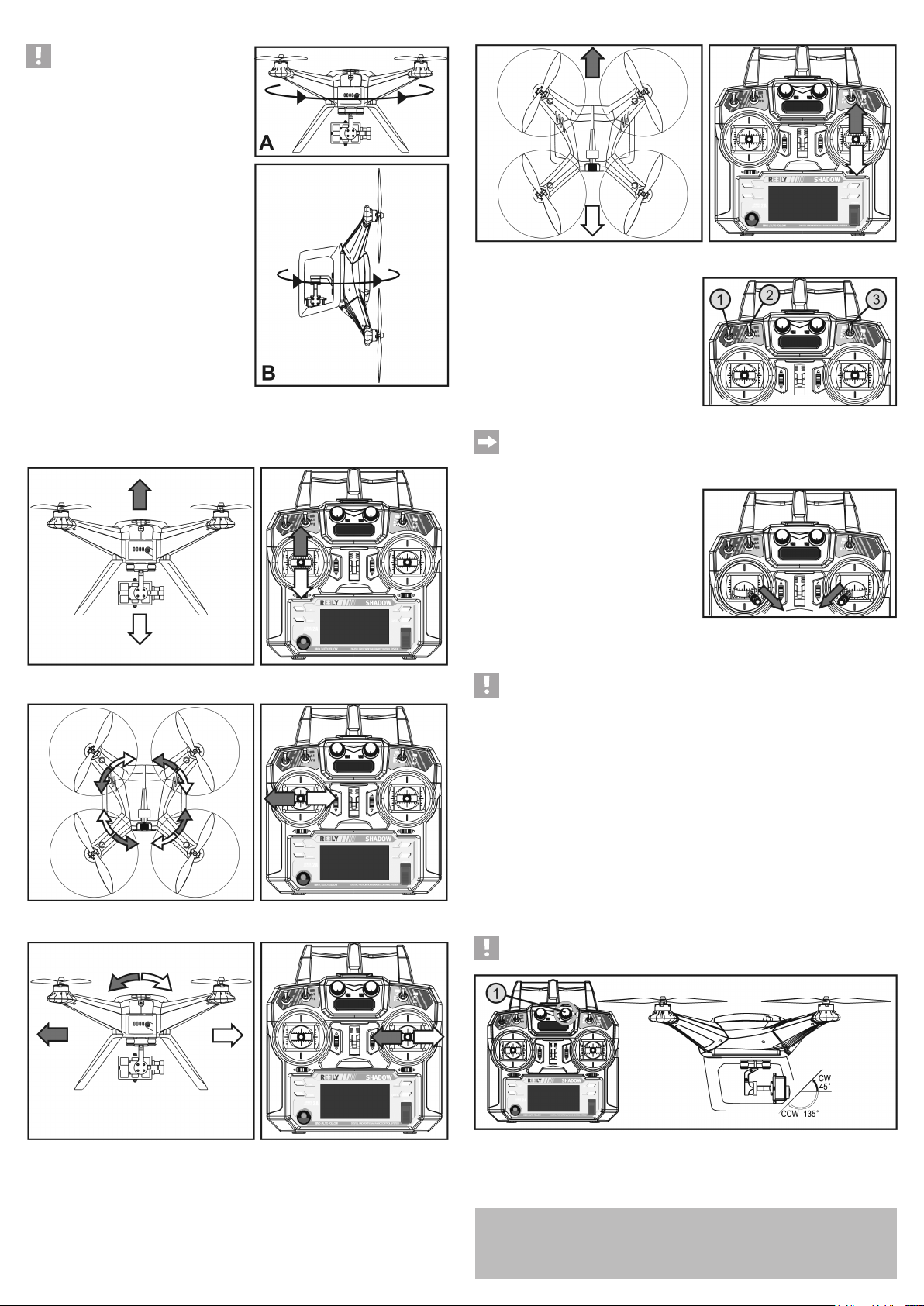
Kalibrieren des Kompasses
Bevor der Quadrocopter gestartet werden
kann, muss der Kompass kalibriert werden.
Wir empfehlen die Kalibrierung vor jedem Flug.
Nach einem Standortwechsel zu einer anderen
Startposition muss der Kompass kalibriert wer-
den.
• Schalten Sie den Kippschalter „GPS“ 5 Mal schnell
von der vorderen Position (Position 1) in die hintere
Position (Position 2) und wieder zurück. Die Status
LEDs am Quadrocopter müssen danach dauerhaft
gelb (rot und grün) leuchten.
• Halten Sie den Quadrokopter waagerecht (siehe Bild
8, Abbildung A) und drehen Sie ihn solange um die
Hochachse, bis die Status-LEDs die Farbe auf Grün
wechseln (mindestens 360°).
• Halten Sie danach den Quadrocopter mit den vorde-
ren Propellern senkrecht nach unten und drehen ihn
nun 360° um die Längsachse (siehe Bild 8, Abbildung
B) bis die Status-LEDs ausgehen.
• Die Kalibrierung ist abgeschlossen.
• Bringen Sie den Quadrocopter zurück in die normale
Lage.
• Nach kurzer Zeit blinken die Status-LEDs gemäß den
empfangenen GPS-Satelliten.
• Falls die Status-LEDs rot und gelb blinken, war die
Kalibrierung fehlerhaft und muss wiederholt werden.
Grundsätzliche Informationen zum Steuern von Quadrocoptern
Pitch-Funktion
Gier-Funktion
Bild 8
Bild 9
Nick-Funktion
Einstellen der Kippschalter
Bild 12
Bevor Sie Ihr Modell zum ersten Mal abheben lassen,
Überprüfen Sie die Schalterstellungen der drei Kipp-
schalter „IOC“ (1), „GO-HOME“ (2) und „GPS“ (3). Die
Schalter müssen sich entsprechend der Zeichnung in
Bild 13 in der vorderen bzw. oberen Position benden.
In dieser Schalterkombination iegt der Quadrocopter
GPS-stabilisiert. Diese Schalterstellung ist ideal für die
ersten Testüge im Freien geeignet.
Sollte der Quadrocopter Indoor genutzt werden, so
muss der Schalter „GPS“ (3) in die untere Stellung
(„GPS“ aus) geschaltet werden.
Bild 13
Für weitere Informationen zu den Schalterfunktionen lesen Sie bitte die Komplettanleitung, die u.a.
auch im Conrad-Internetshop bei der Produktdetailansicht zum Download bereit liegt.
Starten des Quadrocopters
• Warten Sie, bis der Quadrocopter mehr als sechs
GPS-Satelliten empfängt und den Startpunkt gespeichert hat. Die Status-LEDs blinken dann ca. alle 5 s
grün. Der Quadrocopter ist nun startbereit.
• Bewegen Sie den linken Steuerknüppel nach rechts
unten und gleichzeitig den rechten Steuerknüppel
nach links unten (siehe Bild 14).
• Sobald die Motoren anlaufen, führen Sie die beiden
Steuerknüppel unverzüglich wieder zurück in die Mittelstellung.
• Die nach unten gerichteten LEDs der vorderen Ausle-
Bild 14
gerarme leuchten weiß und die nach unten gerichteten LEDs der hinteren Auslegerarme leuchten rot.
Wichtig!
Wenn Sie die beiden Steuerknüppel wieder nach innen und unten bewegen, werden die Motoren
ausgeschaltet. Führen Sie deshalb diese Steuerbewegung niemals im Flug durch!
• Schieben Sie den Steuerknüppel für die Pitchfunktion langsam nach vorne. Der Quadrocopter erhöht die
Propellerdrehzahl und hebt ab.
• Wenn Sie den Steuerknüppel zurück in die Mittelstellung führen, schwebt der Quadrocopter auf gleichbleibender Höhe.
• Führen Sie in 1 - 2 m Höhe die ersten vorsichtigen Richtungssteuerungen aus und achten Sie darauf, wie
der Quadrocopter auf die Steuerbefehle reagiert.
• Um den Quadrocopter wieder zu landen, ziehen Sie den Steuerknüppel für die Pitchfunktion aus der
Mittelstellung etwas nach hinten, damit der Quadrocopter die Flughöhe langsam reduziert und landet.
• Ziehen Sie den Steuerknüppel für die „Pitch“-Funktion ganz zum Körper und halten ihn in dieser Position,
um die Motoren auszuschalten.
Roll-Funktion
Bild 10
Bild 11
Gimbal-Steuerung
Die Kamera kann aus der horizontalen Lage vertikal um 45° nach oben und 135° nach unten geschwenkt
werden. Die Steuerung der Schwenkbewegung erfolgt mit Hilfe des Drehreglers VRB (1).
Achtung, wichtig!
Betreiben Sie die Kamerahalterung niemals ohne eingebaute Kamera!
Bild 15
Dies ist eine Publikation der Conrad Electronic SE, Klaus-Conrad-Str. 1, D-92240 Hirschau (www.conrad.com).
Alle Rechte einschließlich Übersetzung vorbehalten. Reproduktionen jeder Art, z. B. Fotokopie, Mikroverlmung, oder
die Erfassung in elektronischen Datenverarbeitungsanlagen, bedürfen der schriftlichen Genehmigung des Herausgebers.
Nachdruck, auch auszugsweise, verboten. Die Publikation entspricht dem technischen Stand bei Drucklegung.
© Copyright 2016 by Conrad Electronic SE. 1400004_V3_1016_01_VTP_hs_de
Page 3
Brief Instructions
Quadrocopter „Shadow 2.0“ RTF
www.conrad.com
Version 10/16
Item No. 1400004
You can download the complete product instructions via the link www.conrad.com/downloads. Fol-
low the instructions on the website.
Preparation of the Quadrocopter
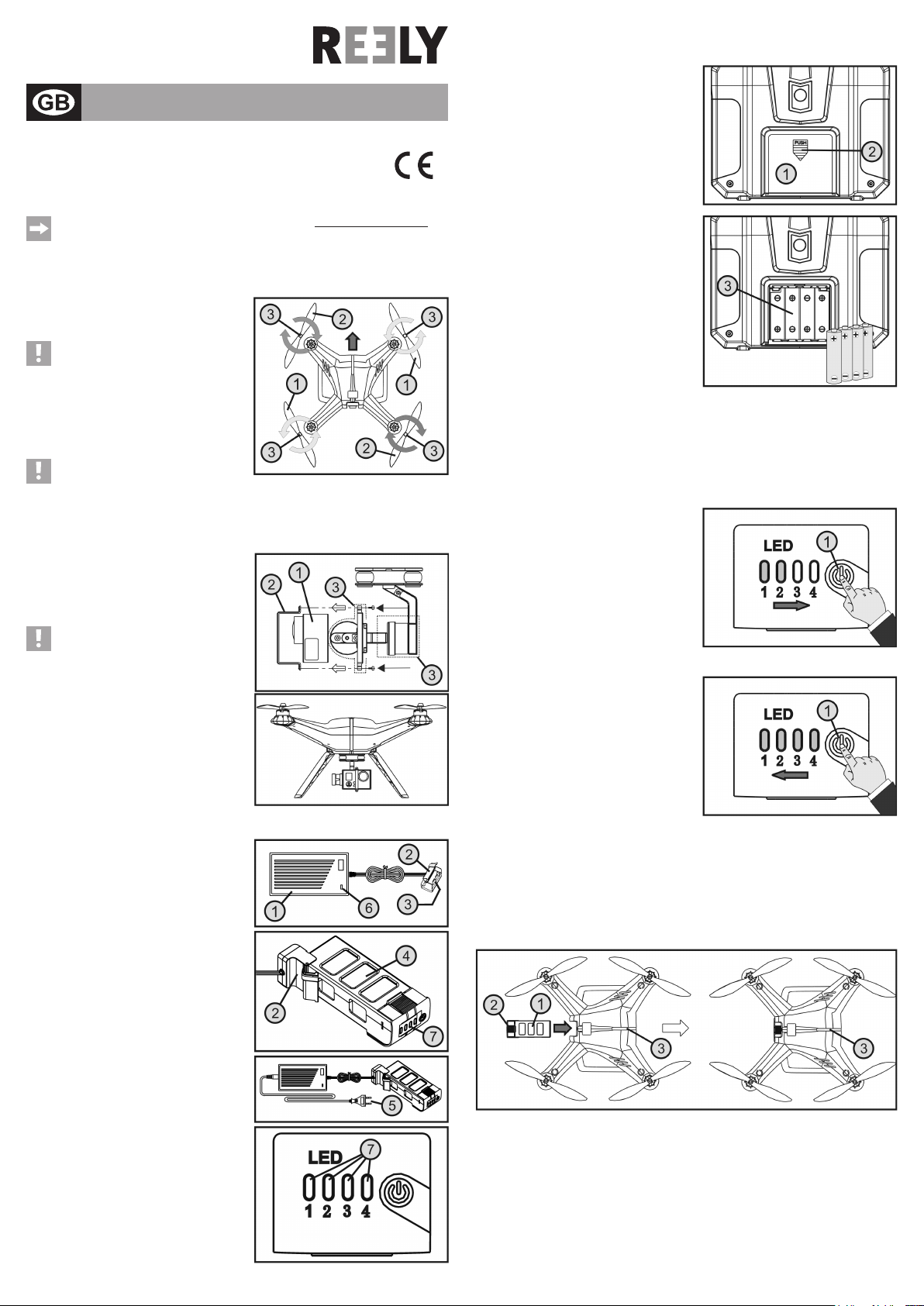
Mounting the Propellers
The quadrocopter comes with 1 pair of left-turning
propellers (1) and 1 pair of right-turning propellers (2)
each.
Important!
Observe the rotating direction of the propellers
at installation. The propellers at the front left
and the rear right turn clockwise when viewed
from above; the propellers on the front right
and rear left turn counter-clockwise.
The arrow in the upper half of the picture shows the
ight direction of the model forwards.
The propellers have glued-in attachment nuts
(see gure 1, item 3), which tighten themselves
when the quadrocopter is in operation.
To attach the propellers, place the respective propellers on the threads of the motor shafts and
manually turn the propellers contrary to the regular operating rotating direction. Hold the bell of the
brushless motor with the other hand.
Stabilised Camera Holder (2 D-Gimbal)
To install a camera of type GoPro or other corresponding cameras (1), the holding bracket (2) must be removed and attached again with the two M2 x 5 screws after
inserting the camera.
Attention, important!
The two transparent plastic covers (3) serve to
protect the gimbal when transporting the quadrocopter. The covers must be removed before
inserting the ight battery or the camera.
Never operate the camera holder without a ca-
mera inserted.
The missing weight of the camera will cause
the holder to be unbalanced, which will put too
much of a strain on the controlling electronics,
which may be damaged.
Charging the Flight Battery
The 3-cell ight battery is charged using the enclosed
mains unit (1) supplied. For this, open the covers of the
charge adapter (2), so that the two large charging contacts (3) are visible.
Connect the ight battery (4) to the charge adapter according to the two middle illustrations in gure 3.
After connecting the enclosed mains cable to the mains
unit, connect the mains plug (5) to a proper mains socket of the public mains.
The indicator lamp at the mains unit lights up red to signal that charging is in progress. At the same time, the
four LEDs at the ight battery (7) indicate the current
charge condition.
When the ight battery is discharged, only LED 1 is lit.
With increasing battery charge, LED 2 rst starts to ash
and then remains lit. This display will also be repeated
in LED 3 and LED 4 as charging continues. Before charging is complete, all 4 LEDs will be permanently lit.
When the ight battery is fully charged, the four LEDs at
the ight battery (7) will go out and the control indicator
at the mains unit (6) will light up green.
Once charging is completed, disconnect the ight batte-
ry from the charge adapter and pull the mains plug from
the mains socket.
Figure 1
Figure 2
Setting up the Transmitter
Inserting the Batteries
The battery compartment lid (1) is located at the rear of
the transmitter. Push the grooved surface
(2) and push the lid off downwards.
Ensure that the polarity is correct when inserting the
4 batteries. A corresponding note (3) is located on the
bottom of the battery compartment.
Figure 4
Commissioning of the Quadrocopter
Checking Activation/Deactivation function of the Flight Battery
Before inserting the ight battery in the quadrocopter, check the activation/deactivation function of the electronics in the ight battery.
Switching on
To switch on the ight battery, briey push the on/off button (1) at the ight battery and release it again at once.
When the ight battery fully charged, the four LEDs of
the ight battery will start to light up.
Now push the on/off button (1) again and keep it pushed. The four LEDs will go out and start to light up
again in sequence (LED 1 to LED 4).
When all four LEDs are lit, release the button again. The
ight battery is now on and voltage is pending on the
rechargeable battery contacts.
Switching Off
Briey push the on/off button (1) at the ight battery
with the ight battery switched on and release it again
at once. The four LEDs of the ight battery will start to
ash three times.
During this time, push the on/off button (1) again and
keep it pushed. The four LEDs will be lit and then go out
in sequence (LED 4 to LED 1).
When LED 1 has gone dark as well, release the button
again. The ight battery is now off and the battery contacts are powered down.
Inserting the Flight Battery into the Quadrocopter
Before inserting the ight battery in the quadrocopter, briey push the on/off button on the ight battery. All
four LEDs must be lit for two seconds.
Push the deactivated ight battery (see gure 7, item 1) into the quadrocopter with the charge connection
contacts rst. Slightly push the grooved surface of the battery lock (see gure 7, item 2) so that the locking
tab can latch.
When the ight battery has been inserted into the quadrocopter and is locked properly, switch on the transmitter and then the ight battery.
Figure 5
Figure 6
Figure 7
Figure 3
Page 4

Calibration of the Compass
Before the quadrocopter can be started, the
compass must be calibrated.
We recommend calibration before each ight.
After a site change to another starting position,
the compass must be calibrated.
• Switch the toggle switch „GPS“ 5 times quickly from
the front position (position 1) to the rear position (position 2) and back. The status LEDs at the quadrocopter
must be permanently lit yellow (red and green).
• Hold the quadrocopter horizontally (see gure 8, illustration A) and turn it around its vertical axis until the
status LEDs switch to green (at least 360°).
• Then hold the quadrocopter with the front propellers
vertically down and turn it around the longitudinal axis
by 360° (see gure 8, illustration B), until the status
LEDs go out.
• Calibration is complete.
• Return the quadrocopter to the normal position.
• After a brief time, the status LEDs will ash according
to the GPS satellites received.
• If the status LEDs ash red and yellow, Calibration is
wrong and must be repeated.
Basic Information Relevant for Controlling of Quadrocopter
Pitch Function
Yaw Function
Figure 8
Figure 9
Nod Function
Figure 12
Setting the Toggle Switches
Before you let your model take off for the rst time,
check the switch positions of the three rocker switches
„IOC“ (1), „GO-HOME“ (2) and „GPS“ (3). The switches
must be in the front or top position according to the dra-
wing in gure 13.
In this switch combination, the quadrocopter ies GPSstabilised. This switch position is ideal for the rst test
ights outdoors.
If the quadrocopter is used indoors, the switch „GPS“ (3)
must be in the bottom position („GPS“ off).
For more information on the switch functions,
Figure 13
read the complete instructions, among others
available in the Conrad online shop for download with the product detail view.
Starting the Quadrocopter
• Wait until the quadrocopter receives more than six
GPS satellites and has saved the starting point. The
status LEDs will then ash green approx. every 5 s.
Now your quadrocopter is ready to start.
• Move the left control stick to the lower right and at the
same time the right control stick to the lower left (see
gure 14).
• Once the motors start up, return both control sticks to
the middle position again without delay.
• The LEDs pointing down on the front boom arms are
white and the LEDs pointing down on the rear boom
Figure 14
arms are red.
Important!
If the two control sticks move inward and down again, the motors are switched off. Therefore, never
perform this control movement in ight!
• Push the control stick for the pitch function to the front slowly. The quadrocopter increases the propeller
speed and takes off.
• When you return the control stick to the middle position, the quadrocopter will hover.
• Perform the rst careful direction controls at an altitude of 1 - 2 m and observe how the quadrocopter reacts
to the control commands.
• To land the quadrocopter again, pull the control stick for the pitch function from the middle position back a
bit for the quadrocopter to slowly reduce ight altitude and land.
• Pull the control lever for the „pitch“ function all the way to your body and keep it in this position to switch
off the motors.
Roll function
Figure 10
Figure 11
Gimbal Control
The camera can be swivelled vertically from the horizontal position up by 45° and down by 135°. The swivel
movement is controlled with the rotary controller VRB (1).
Caution, important!
Never operate the camera holder without a camera inserted!
Figure 15
Figure 15
This is a publication by Conrad Electronic SE, Klaus-Conrad-Str. 1, D-92240 Hirschau (www.conrad.com).
All rights including translation reserved. Reproduction by any method, e.g. photocopy, microlming, or the capture in
electronic data processing systems require the prior written approval by the editor. Reprinting, also in part, is prohibited.
This publication represent the technical status at the time of printing.
© Copyright 2016 by Conrad Electronic SE. 1400004_V3_1016_01_VTP_hs_en
Page 5

Mode d’emploi abrégé
QuadroCopter « Shadow 2.0 » RTF
www.conrad.com
Version 10/16
N° de commande 1400004
Vous pouvez télécharger le mode d’emploi complet concernant le produit par l’intermédiaire du lien
www.conrad.com/downloads. Veuillez suivre les instructions sur le site.
Préparation du QuadroCopter
Montage des hélices
Le QuadroCopter est respectivement fourni avec 1
paire d’hélices à rotation vers la gauche (1) et 1 paire
d’hélices à rotation vers la droite (2).
Important !
Lors du montage, respectez le sens de rotati-
on des hélices. Vues par le haut, les hélices à
l’avant à gauche et à l’arrière à droite tournent
dans le sens horaire et les hélices à l’avant à
droite et à l’arrière à gauche tournent dans le
sens antihoraire.
La èche sur la moitié du haut de la gure montre la
direction de vol du modèle réduit vers l’avant.
Les hélices comportent des écrous de xation collés (voir gure 1, n° 3), qui sont automatiquement
serrés à fond pendant le fonctionnement du QuadroCopter.
Pour xer les hélices, placez les hélices respectives sur le letage des arbres moteur puis tournez
les hélices à une main dans le sens opposé au sens de rotation normal pendant le fonctionnement.
Tenez alors fermement la cloche du moteur Brushless avec l’autre main.
Support de caméra stabilisé (2D-Gimbal)
Pour monter une caméra du type GoPro ou similaire (1),
l’étrier de retenue (2) doit être démonté puis remonté
après la mise en place de la caméra à l’aide des deux
vis M2 x 5.
Attention, important !
Les deux couvercles en plastique transparent
(3) protègent uniquement le Gimbal pendant le
transport du QuadroCopter. Avant l’insertion de
la batterie de propulsion ou de la caméra, les
caches doivent impérativement être retirés.
N’employez jamais le support de caméra sans
la caméra intégrée.
En l’absence de la caméra, le support n’est pas
équilibré, l’électronique de régulation pouvant
alors subir une surcharge excessive et être
endommagée.
Charge de la batterie de propulsion
La batterie de propulsion à 3 cellules se recharge à
l’aide du bloc d’alimentation (1). Pour ce faire, rabattez
le cache
de l’adaptateur de charge (2) vers le haut de manière
à ce que les deux grands contacts de charge (3) soient
visibles.
Raccordez la batterie de propulsion (4) à l’adaptateur
de charge conformément aux deux gures centrales sur
la gure 3.
Après avoir raccordé le cordon d’alimentation fourni
au bloc d’alimentation, branchez la che de secteur
(5) dans une prise de courant conforme du réseau
d’alimentation public.
Le voyant de contrôle sur le bloc d’alimentation vire au
rouge et signalise ainsi le cycle de charge. Les quatre
DEL sur la batterie de propulsion (7) indiquent simultanément le niveau de charge actuel.
Lorsque la batterie de propulsion est déchargée, seule
la DEL 1 est allumée. Lorsque la charge de la batterie
augmente, la DEL 2 clignote d’abord puis reste allumée
en permanence. Lorsque la charge se poursuit, la DEL 3
et la DEL 4 réagissent également de la même manière.
Avant la n du cycle de charge, tous les 4 DEL sont
allumées en permanence.
Lorsque la batterie de propulsion est complètement
chargée, les quatre DEL virent au vert sur la batterie
de propulsion (7) et le voyant de contrôle sur le bloc
d’alimentation (6).
Une fois le cycle de charge terminé, débranchez la batterie de propulsion rechargée de l’adaptateur de charge
puis retirez la che de secteur de la prise de courant.
Figure 1
Figure 2
Figure 3
Mise en service de l’émetteur
Insertion des piles
Le couvercle du logement des piles (1) se trouve au dos
de l’émetteur. Appuyez sur la surface cannelée (2) puis
faites glisser le couvercle vers le bas.
Lors de l’insertion des 4 piles, respectez la polarité des
cellules. Une inscription correspondante (3) est gravée
au fond du logement des piles.
Figure 4
Mise en service du QuadroCopter
Contrôle de la fonction marche/arrêt de la batterie de propulsion
Avant d’insérer la batterie de propulsion dans le QuadroCopter, il est recommandé de contrôler la fonction
marche-arrêt de l’électronique à l’intérieur de la batterie de propulsion.
Mise en marche
Pour allumer la batterie de propulsion, appuyez brièvement sur le bouton marche-arrêt (1) sur la batterie de
propulsion et relâchez-le immédiatement. Lorsque la
batterie de propulsion est pleine, les quatre DEL de la
batterie de propulsion s’allument.
Appuyez maintenant encore une fois sur le bouton marche-arrêt (1) et maintenez-le enfoncé. Les quatre DEL
s’éteignent puis s’allument à nouveau successivement
(DEL 1 à DEL 4).
Lorsque toutes les quatre DEL sont allumées, relâchez
de nouveau le bouton. La batterie de propulsion est
maintenant allumée et la tension est disponible sur les
contacts de la batterie.
Mise à l’arrêt
Lorsque la batterie de propulsion est allumée, appuyez
brièvement sur le bouton marche-arrêt (1) sur la batterie
de propulsion et relâchez-le immédiatement. Les quatre
DEL de la batterie de propulsion clignotent trois fois.
Pendant ce temps, appuyez encore une fois sur le
bouton marche-arrêt (1) et maintenez-le enfoncé. Les
quatre DEL s’allument et s’éteignent successivement
(DEL 4 à DEL 1).
Dès que la DEL 1 est également éteinte, relâchez le
bouton. La batterie de propulsion est maintenant éteinte
et les contacts de la batterie ne sont plus sous tension.
Insertion de la batterie de propulsion dans le QuadroCopter
Avant d’insérer la batterie de propulsion dans le QuadroCopter, appuyez brièvement sur le bouton marche-
arrêt de la batterie de propulsion. Toutes les quatre DEL doivent s’allumer pendant deux secondes.
Glissez la batterie de propulsion éteinte (voir gure 7, n° 1) avec les contacts de raccordement de charge
vers l’avant dans le QuadroCopter. Appuyez légèrement sur la surface cannelée du verrouillage de la batterie (voir gure 7, n° 2) an que la languette de verrouillage puisse s’enclencher.
Après avoir inséré puis correctement verrouillé la batterie de propulsion dans le QuadroCopter, allumez
l’émetteur puis la batterie de propulsion.
Figure 5
Figure 6
Figure 7
Page 6

Calibrage de la boussole
Avant de pouvoir démarrer le QuadroCopter, la
boussole doit être calibrée.
Nous recommandons un calibrage avant
chaque vol.
La boussole doit être calibrée en cas de dé-
placement du modèle réduit vers un autre emplacement de démarrage.
• Basculez 5 fois de suite rapidement l’interrupteur à
bascule « GPS » de la position avant (position 1) vers
la position arrière (position 2) et inversement. Les
DEL d’état sur le QuadroCopter doivent ensuite être
allumées en permanence en jaune (rouge et vert).
• Tenez le QuadroCopter à l’horizontale (voir g. 8,
illustration A) et tournez-le sur son axe de giration
jusqu’à ce que les DEL d’état virent au vert (minimum
360°).
• Tenez ensuite le QuadroCopter avec les hélices avant
à l’horizontale vers le bas et tournez-le maintenant de
360° sur l’axe longitudinal (voir g. 8, illustration B)
jusqu’à ce que les DEL d’état s’éteignent.
• Le calibrage est terminé.
• Amenez à nouveau le QuadroCopter en position nor-
male.
• Après un court instant, les DEL d’état clignotent en
fonction des satellites GPS disponibles.
• Si les DEL d’état clignotent en rouge et en jaune, le
calibrage a échoué et vous devez répéter la procédure.
Informations fondamentales à propos du pilotage du QuadroCopter
Fonction de pas
Fonction de lacet
Figure 8
Figure 9
Fonction de tangage
Figure 12
Réglage des interrupteurs à bascule
Avant le premier décollage de votre modèle réduit, contrôlez les positions des trois interrupteurs à bascule «
IOC » (1), « GO-HOME » (2) et « GPS » (3). Les interrupteurs doivent se trouver en position avant ou haute
conformément au dessin sur la gure 13.
Avec cette combinaison d’interrupteurs, le QuadroCop-
ter est stabilisé par GPS durant le vol. Cette position des
interrupteurs constitue un choix idéal pour les premiers
vols d’essai en plein air.
En cas d’utilisation du QuadroCopter en intérieur,
l’interrupteur « GPS » (3) doit se trouver en position
Figure 13
basse (« GPS » désactivé).
Pour de plus amples informations à propos des fonctions des interrupteurs, veuillez lire le mode
d’emploi complet, qui peut notamment être téléchargé dans la boutique en ligne Conrad sur la page
détaillée du produit.
Décollage du QuadroCopter
• Attendez jusqu’à ce que le QuadroCopter capte plus
de six satellites GPS et que le point de départ soit
enregistré. Les DEL d’état clignotent alors environ
toutes les 5 secondes en vert. Le QuadroCopter est
maintenant prêt à décoller.
• Déplacez le levier de commande gauche vers le bas
à droite et déplacez simultanément le levier de com-
mande droit vers le bas à gauche (voir g. 14).
• Dès que les moteurs démarrent, déplacez à nouveau
immédiatement les deux leviers de commande en position médiane.
Figure 14
• Les DEL orientées vers le bas des bras avant du balancier virent au blanc et les DEL orientées vers le bas
des bras arrière du balancier virent au rouge.
Important !
Si vous déplacez à nouveau les deux leviers de commande vers l’intérieur et le bas, les moteurs
sont coupés. Ne réalisez donc jamais cette manœuvre pendant un vol !
• Poussez lentement le levier de commande pour la fonction de pas vers l’avant. Le QuadroCopter augmente la vitesse de rotation des hélices et se décolle du sol.
• Si vous déplacez à nouveau le levier de commande en position médiane, le QuadroCopter plane à altitude
constante.
• Réalisez avec une grande prudence les premiers changements de direction à une altitude de 1 ou 2
mètres et observez comment le QuadroCopter réagit aux instructions de pilotage.
• Pour atterrir à nouveau le QuadroCopter, tirez le levier de commande pour la fonction de pas à partir de
la position médiane légèrement vers l’arrière an que le QuadroCopter perde lentement de l’altitude avant
de nalement atterrir.
• Tirez complètement le levier de commande pour la fonction de « pas » vers vous et maintenez-le dans
cette position pour éteindre les moteurs.
Fonction de roulis
Figure 10
Figure 11
Commande Gimbal
La caméra peut être pivotée, à partir de la position horizontale, à la verticale de 45° vers le haut et de 135°
vers le bas. Le pivotement se pilote à l’aide du bouton rotatif VRB (1).
Attention, important !
N’employez jamais le support de caméra sans la caméra intégrée !
Figure 15
Ceci est une publication de Conrad Electronic SE, Klaus-Conrad-Str. 1, D-92240 Hirschau (www.conrad.com).
Tous droits réservés, y compris de traduction. Toute reproduction, quelle qu‘elle soit (p. ex. photocopie, microlm, saisie
dans des installations de traitement de données) nécessite une autorisation écrite de l‘éditeur. Il est interdit de le réimprimer, même par extraits. Cette publication correspond au niveau technique du moment de la mise sous presse.
© Copyright 2016 par Conrad Electronic SE. 1400004_V3_1016_01_VTP_hs_fr
Page 7

Beknopte handleiding
Quadrocopter „Shadow 2.0“ RTF
www.conrad.com
Versie 10/16
Bestelnr. 1400004
De volledige handleiding kunt u downloaden via de link www.conrad.com/downloads. Volg de aan-
wijzingen op de website.
Quadrocopter voorbereiden
Montage van de propellers
Er werden telkens 1 paar linksdraaiende propellers (1)
en 1 paar rechtsdraaiende propellers (2) bij de quadrocopter meegeleverd.
Belangrijk!
Let bij de montage op de draairichting van
de propellers. De propellers linksvoor en
rechtsachter draaien van boven gezien in de
richting van de wijzers van de klok en de propeller rechtsvoor en linksachter draaien tegen
de richting van de wijzers van de klok.
De pijl in de bovenste schermhelft geeft de vliegrichting
van het model naar voor weer.
De propellers beschikken over ingekleefde bevestigingsmoeren (zie afbeelding 1, pos. 3) die zich
bij het gebruik van de quadrocopter vanzelf aanspannen.
Om de propellers te bevestigen, plaatst u de respectievelijke propellers op de schroefdraad van de
motorassen en draait u de propellers met een hand tegen de normale bedrijfsdraairichting in vast.
Houd daarbij de klok van de brushless motor met de andere hand vast.
Gestabiliseerde camerahouder (2 D-Gimbal)
Om een camera van het type GoPro of een identieke
camera (1) te monteren, moet de houderbeugel (2)
worden verwijderd en na het plaatsen van de camera
opnieuw met beide M2 x 5 schroeven worden bevestigd.
Opgelet! Belangrijk!
Beide doorzichtige kunststof deksels (3) die-
nen slechts voor de bescherming van de gimbal bij het transport van de quadrocopter. De
deksels moeten altijd worden verwijderd voor
de vliegaccu of camera wordt gebruikt.
Gebruik de camerahouder nooit zonder inge-
bouwde camera.
Door het ontbrekende gewicht van de camera
is de houder niet uitgebalanceerd, waardoor
de regelelektronica overmatig wordt belast en
schade kan oplopen.
Opladen van de vliegaccu
De 3-cellige vliegaccu wordt met behulp van het meegeleverde netdeel (1) opgeladen. Klap daarvoor het deksel
van de laadadapter (2) open zodat beide grote laadcontacten (3) te zien zijn.
Sluit de vliegaccu (4) in overeenstemming met beide
middelste deksels in afbeelding 3 aan de laadadapter
aan.
Nadat u het meegeleverde netsnoer met het netdeel
hebt verbonden, verbindt u de netstekker (5) met een
standaard contactdoos van het openbaar stroomnet.
Het controlelampje aan het netdeel licht rood op en geeft zo het laadproces weer. Tegelijk geven de vier LED‘s
op de vliegaccu (7) de huidige laadtoestand weer.
Bij een ontladen vliegaccu licht alleen LED 1 op. Naargelang de acculading toeneemt, begint LED 2 eerst te
knipperen en licht later permanent op. Deze aanduiding
vindt ook bij LED 3 en LED 4 plaats als het opladen
wordt verder gezet. Voor het beëindigen van het opladen lichten alle 4 de LED‘s permanent op.
Afbeelding 1
Afbeelding 2
Ingebruikneming van de zender
Batterijen plaatsen
Het deksel van het batterijvak (1) bevindt zich aan de
achterzijde van de zender. Druk op het geribbeld oppervlak (2) en schuif het deksel naar beneden af.
Let bij het plaatsen van de 4 batterijen/accu‘s op de
juiste polariteit van de cellen. Op de bodem van het
batterijvak staat een aanwijzing (3) voor de poolrichting.
Afbeelding 4
Ingebruikname van de quadrocopter
In-/uitschakelfunctie van de vliegaccu controleren
Voor u de vliegaccu in de quadrocopter wilt gebruiken, moet u de aan-/uitschakelfunctie van de elektronica
in de vliegaccu controleren.
Inschakelen
Om de vliegaccu in te schakelen, drukt u kort op de
aan-/uitknop (1) op de vliegacccu en laat u deze onmiddellijk opnieuw los. Bij een volledig opgeladen vliegaccu
lichten de vier LED‘s van de vliegaccu op.
Druk nu opnieuw op de aan-/uitknop (1) en houd deze
ingedrukt. De vier LED‘s doven uit en beginnen na elkaar (LED 1 tot LED 4) opnieuw op te lichten.
Wanneer alle vier de LED‘s oplichten, laat u de knop
opnieuw los. De vliegaccu is nu ingeschakeld en de
spanning is aan de accucontacten aangesloten.
Uitschakelen
Druk bij een ingeschakelde vliegaccu kort op de aan-/
uitknop (1) op de vliegacccu en laat deze onmiddellijk
opnieuw los. De vier LED‘s van de vliegaccu beginnen
drie maal te knipperen.
Tijdens deze periode drukt u opnieuw op de aan-/uitknop (1) en houdt u deze ingedrukt. De vier LED‘s lichten op en doven na elkaar (LED 4 tot LED 1) uit.
Wanneer LED 1 ook uitgedoofd is, laat u de knop opnieuw los. De vliegaccu is nu uitgeschakeld en de accucontacten zijn vrij van spanning.
Vliegaccu in de quadrocopter plaatsen
Voor u de vliegaccu in de quadrocopter gebruikt, drukt u kort op de aan-/uitknop op de vliegaccu. Alle vier
de LED‘s moeten twee seconden lang oplichten.
Schuif nu de uitgeschakelde vliegaccu (zie afbeelding 7, pos. 1) met de laad-aansluitcontacten vooruit in
de quadrocopter. Druk licht op het geribbeld oppervlak van de accuvergrendeling (zie afbeelding 7, pos. 2)
zodat de vergrendelingsneus kan vastklikken.
Wanneer de vliegaccu in de quadrocopter is geschoven en correct is vergrendeld, schakelt u de zender en
vervolgens de vliegaccu in.
Afbeelding 5
Afbeelding 6
Afbeelding 7
Afbeelding 3
Page 8

Kompas kalibreren
Voor de quadrocopter kan worden gestart,
moet het kompas worden gekalibreerd.
Wij raden u aan om dit voor elke vlucht te kalib-
reren.
Na verandering van standplaats naar een
andere startpositie, moet het kompas worden
gekalibreerd.
• Schakel de kantelschakelaar „GPS“ 5 keer snel van
de voorste positie (positie 1) naar de achterste positie
(positie 2) en terug. De status-LED‘s aan de quadrocopter moeten daarna permanent geel (rood en
groen) oplichten.
• Houd de quadrocopter horizontaal (zie afbeelding 8,
afbeelding A) en draai deze rond de hoogteas tot de
status-LED groen oplicht (minstens 360°).
• Houd de quadrocopter daarna met de voorste propellers verticaal naar beneden en draai hem nu 360° om
de lengteas (zie afbeelding 8, guur B) tot de status-
LED‘s uitdoven.
• Het kalibreren is voltooid.
• Breng de quadrocopter terug in de normale stand.
• Na korte tijd knipperen de status-LED‘s in overeen-
stemming met ontvangen GPS-satellieten.
• Als de status-LED‘s rood en geel knipperen, was Kalibreren mislukt en moet worden herhaald.
Basisinformatie voor de besturing van de quadrocopters
Pitch-functie
Gier-functie
Roll-functie
Afbeelding 8
Afbeelding 9
Afbeelding 10
Nick-functie
Afbeelding 12
Kantelschakelaars instellen
Voor u uw model voor het eerst laat opstijgen, controleert u de schakelaarinstellingen van de drie kantel-
schakelaars „IOC“ (1), „GO-HOME“ (2) en „GPS“ (3).
De schakelaars moeten in overeenstemming met de
tekening in afbeelding 13 zich in de voorste of achterste
positie bevinden.
In deze schakelaarcombinatie vliegt de Quadrocopter
GPS-gestabiliseerd. Deze schakelaarstand is ideaal
voor de eerste testvluchten in de open lucht.
Als de quadrocopter binnenshuis wordt gebruikt, moet
de schakelaar „GPS‘“ (3) in de onderste stand (‚GPS‘
Afbeelding 13
uit) worden geschakeld.
Voor meer informatie over de schakelaarsfuncties leest u de volledige handleiding, die o.m. in de
Conrad-internetshop bij het productdetailoverzicht beschikbaar is om te downloaden.
Quadrocopter starten
• Wacht tot de quadrocopter meer dan zes GPS-satellieten ontvangt en het startpunt heeft opgeslagen.
De status-LED‘s knipperen dan elke 5 sec. groen. De
Quadrocopter is nu startklaar.
• Als u de linker stuurknuppel naar rechtsonder beweegt en tegelijk de rechter stuurknuppel naar linksonder (zie afbeelding 14).
• Van zodra de motoren starten, voert u beide stuurknuppels onmiddellijk terug in de middelste stand.
• De naar beneden afgestelde LED‘s van de voorste
zwenkbare arm lichten wit op en de naar beneden
Afbeelding 14
gerichte LED‘s van de achterste zwenkbare armen
lichten rood op.
Belangrijk!
Wanneer u beide stuurknuppels opnieuw naar binnen en beneden beweegt, worden de motoren
uitgeschakeld. Voer daarom deze stuurbeweging nooit tijdens het vliegen uit!
• Schuif de stuurknuppel voor de pitchfunctie langzaam naar voor. De quadrocopter verhoogt het propellertoerental en stijgt op.
• Wanneer u de stuurknuppel terug in de middelste stand brengt, zweeft de quadrocopter op gelijkblijvende
hoogte.
• Voer op een hoogte van 1 - 2 m. de eerste voorzichtige richtingssturingen uit en let op hoe de quadrocopter
op de stuurbevelen reageert.
• Om de quadrocopter opnieuw te lanen, trekt u de stuurknuppel voor de pitchfunctie uit de middelste stand
een beetje naar achter zodat de quadrocopter zijn vlieghoogte langzaam vermindert en landt.
• Trek de stuurknuppel voor de „pitch“-functie helemaal naar u toe en houd hem in deze positie, om de
motoren uit te schakelen.
Gimbal-sturing
De camera kan uit de horizontale stand verticaal 45° naar boven en 135° naar beneden worden gekanteld.
De besturing van de kantelbeweging gebeurt met behulp van draairegelaar VRB (1).
Let op, belangrijk!
Gebruik de camerahouder nooit zonder ingebouwde camera.
Afbeelding 11
Afbeelding 15
Dit is een publicatie van Conrad Electronic SE, Klaus-Conrad-Str. 1, D-92240 Hirschau (www.conrad.com).
Alle rechten, vertaling inbegrepen, voorbehouden. Reproducties van welke aard dan ook, bijvoorbeeld fotokopie, micro-
verlming of de registratie in elektronische gegevensverwerkingsapparatuur, vereisen de schriftelijke toestemming van de
uitgever. Nadruk, ook van uittreksels, verboden. De publicatie voldoet aan de technische stand bij het in druk bezorgen.
© Copyright 2016 by Conrad Electronic SE. 1400004_V3_1016_01_VTP_hs_nl
 Loading...
Loading...