

Page 1
Kvadrokoptéra
Shadow 2.0
, Rtf.
Obj. č.: 140 00 04
Vážení zákazníci,
děkujeme Vám za Vaši důvěru a za nákup kvadrokoptéry Reely Shadow 2.0, RtF.
Tento návod k obsluze je součástí výrobku. Obsahuje důležité pokyny k uvedení výrobku
‚do provozu a k jeho obsluze. Jestliže výrobek předáte jiným osobám, dbejte na to, abyste
jim odevzdali i tento návod.
Ponechejte si tento návod, abyste si jej mohli znovu kdykoliv přečíst!
Účel použití
Tento výrobek představuje letecký model na elektrický pohon, blízký modelu vrtulníku, který je určen
výhradně k soukromému použití v oblasti řízení modelů v rámci příslušného provozního času.
Výrobek je určen pro použití venku v otevřeném prostoru, ale v případě potřeby lze ho používat
i v dostatečně velkých místnostech (např. v tělocvičnách).
Akumulátor Li-Pol, který je součástí dodávky se nabíjí přiloženou nabíječkou.
Výrobek není hračka a není vhodný pro děti do 14 let.
Rozsah dodávky
1. Kvadrokoptéra s 2D gimbalem připravena k letu
2. Dálkový ovladač (vysílač) s GPS anténou
3. Pohonný akupack s integrovanou elektronikou
4. Napájecí jednotka s nabíjecím adaptérem
5. Připojovací kabel napájecí jednotky
6. USB kabel
7. Šroubovák k výměně vrtulí
8. Párovací konektor
9. Návod k obsluze
Popis výrobku
Kvadrokoptéra má 4 samostatné motory a každý z nich pohání jednu vrtuli. Souběžná akcelerace
všech vrtulí umožňuje při patřičné rychlosti vrtulí, vzlet ze země a stabilní visení ve vzduchu.
Přiložený dálkový ovladač umožňuje ovládat směr letu kvadrokoptéry v požadované letové výšce.
Integrovaný přijímač GPS dovoluje, aby se letoun samostatně orientoval v prostoru a prováděl
komplexní letové manévry. Další přijímač GPS, který je připojený k dálkovému ovladači, umožňuje,
aby kvadrokoptéra automaticky sledovala pohybující se ovladač.
Aby bylo možné snadněji rozpoznat polohu letounu za letu, dvě přední ramena jsou na spodní straně
označena bílým světlem a ramena směrující dozadu mají červené osvětlení.
Na přiloženém dálkovém ovladači 2,4 GHz lze bez problémů přepínat letový režim 1 a 2 a přizpůsobit
si tak detailní řízení modelu.
Pod letounem je umístěn držák (2D gimbal) akční kamery typu GoPro (nebo podobné kamery stejných
rozměrů), jehož účelem je stabilizovat polohu kamery podle dvou os a umožnit tak stabilní nahrávání
videa za letu.
K provozu vysílače budete potřebovat 4 baterie velikosti AA.
Napájecí jednotka
Napájecí jednotka je vyrobena v souladu s ochrannou třídou II.
Pro připojení napájecí jednotky k proudu používejte jen vhodnou zásuvku domovního rozvodu
elektrického proudu. K připojení použijte přiložený napájecí kabel.
Zásuvka, do které se zapojí napájecí kabel jednotky, musí být volně dostupná.
Napájecí kabel nevytahujte ze síťové zásuvky tažením za kabel. Vždy ho vytahujte uchopením
za tělo zástrčky a vytáhněte ho ze zásuvky v přímém směru.
Napájecí jednotku a její kabel chraňte před vlhkem a mokrem a před poškozením.
Nedotýkejte se napájecího kabelu nebo jednotky, pokud se namočí nebo navlhne.
Hrozí nebezpečí smrtelného úrazu zásahem elektrického proudu!
Nejdříve odpojte od proudu síťovou zásuvku, do které je napájecí jednotka/kabel připojena
(např. odpojte pojistku nebo jistič, resp. proudový chránič FI připojeného obvodu). Až poté odpojte
jednotku od síťové zásuvky.
Page 2
Uvedení do provozu
Před uvedením do provozu
Vždy zapínejte jako první dálkové ovládání (vysílač) a až potom připojte k modelu letový
akumulátor. Jen tímto způsobem se zajistí, aby mezi ovladačem a modelem proběhlo vzájemné
propojení a váš model mohl spolehlivě reagovat na řídící pokyny z vysílače.
Zkontrolujte funkční spolehlivost modelu a systému dálkového ovládání. Věnujte pozornost
jakémukoli viditelnému poškození nebo poškozeným kabelům. Všechny pohyblivé prvky se musí
pohybovat lehce, ale nesmí mít příliš velkou vůli v ložisku.
Akumulátor v modelu, který je nezbytný pro létání, se musí před uvedením do provozu nabít.
Ujistěte se, že i baterie ve vysílači mají dostatečnou kapacitu (použijte indikátor stavu na vysílači).
Pokud jsou baterie ve vysílači slabé, vyměňte vždy celou sadu baterií a nikdy neměňte jenom
jednotlivé články.
Dopřejte modelu dostatek času, aby mohl přijmout signály GPS s požadovaných satelitů
a kvadrokoptéra tak mohla provádět samostatné letecké manévry. Sledujte blikající signalizaci
LED kontrolek.
Během provozu
Při ovládání modelu neriskujte! Vaše vlastní bezpečnost i bezpečnost vašeho okolí závisí
při používání modelu jen na vás.
Nesprávný způsob ovládání může vést ke škodám na majetku, nebo k vážnému úrazu.
Proto v průběhu létání vždy udržujte dostatečnou vzdálenost od lidí, zvířat a objektů.
Nikdy se nepokoušejte zachytit letící model rukou!
Při létání s modelem dávejte pozor, aby se žádná část těla nebo nějaký předmět nedostaly
do nebezpečného prostoru točících se vrtulí.
S modelem létejte, jen tehdy, když vaše schopnost reakce není ničím omezena.
Vlivem únavy, alkoholu, nebo léků může docházet k nesprávným reakcím.
V průběhu provozu se motor, řídicí systém a akumulátor v modelu můžou zahřívat. Proto si po letu
udělejte 10-15 minut přestávku a před opětovným dobíjením akumulátoru v modelu, resp. před
dalším letem s náhradním akumulátorem nechte model v klidu vychladnout.
Nikdy nevypínejte dálkové ovládání (vysílač), když je model v chodu. Po přistání vždy nejdříve
odpojte akumulátor v modelu a až potom vypněte dálkové ovládání. Nakonec vyjmete letový
akumulátor z modelu.
Model ani dálkové ovládání nikdy nevystavujte na delší čas přímému slunci, nebo silnému
tepelnému zdroji.
Příprava kvadrokoptéry
Čísla uvedená v textu tohoto návodu k obsluze odkazují na příslušné pozice obrázků v dané
části návodu. Případné odkazy na obrázky z jiných částí jsou označeny příslušným číslem
obrázku.
a) Popis modelu
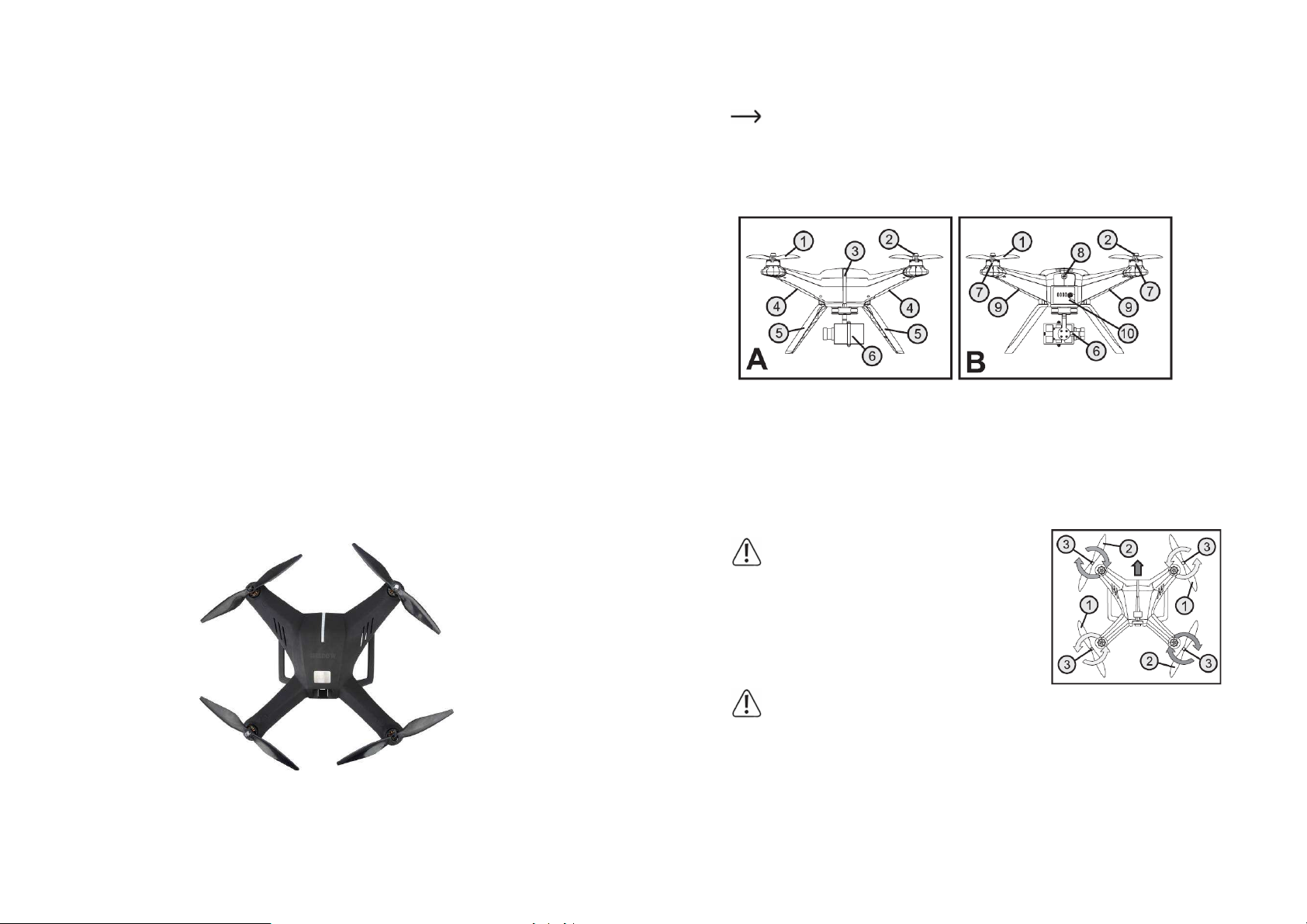
Ilustrace A na obrázku 1 ukazuje kvadrokoptéru při pohledu zepředu. Na ilustraci B je pohled na
kvadrokoptéru zezadu.
Obrázek 1
1. Vrtule 6. 2D gimbal
2. Utahovací matice 7. Elektromotor
3. LED kontrolky stavu 8. USB rozhraní
4. Osvětlení předního ramene 9. Osvětlení zadního ramene
5. Přistávací rám 10. Schránka akumulátoru s LED indikátory
b) Nasazení vrtulí
Kvadrokoptéra má jeden pár vrtulí, které se točí doleva (1) a jeden pár, který se točí doprava (2).
V průběhu instalace dávejte pozor na správný směr
otáčení vrtulí. Vrtule, která je vlevo vepředu a vpravo
vzadu se při pohledu seshora točí ve směru
hodinových ručiček a vrtule, která je vpravo vepředu
a vlevo vzadu se točí proti směru hodinových ručiček
(viz směr otáčení na obrázku 2).
Přesné označení směru otáčení vrtulí je vyznačeno kruhovými
šipkami v horní části krytu.
Tlustá šipka v horní části obrázku č. 2 ukazuje směr letu
dopředu.
Vrtule mají v horní části utahovací matice (viz obr. 2,
bod 3), které jsou během provozu utaženy.
Pokud nasazujete vrtule, vložte příslušnou vrtuli na hřídel motoru a manuálně ji otáčejte
proti směru, kterým se otáčí za letu. Druhou rukou držte poklop motoru.
Při instalaci vrtulí použijte ochranné rukavice, abyste se neporanili o ostré hrany listů.
Vrtule při montáži nepřetáhněte a k jejich zajištění nepoužívejte lak ani lepidlo.
Pokud se některá vrtule poškodí, (když praskne nebo se z ní malý kousek ulomí),
vadnou vrtuli okamžitě vyměňte. Nepokračujte v letu s poškozenou vrtulí.
Udržujte si odstup od točících vrtulí, aby se zabránilo úrazu.
Pokud se vrtule musí vyměnit, používejte jen originální náhradní vrtule od stejného výrobce.
Obrázek 2
Page 3
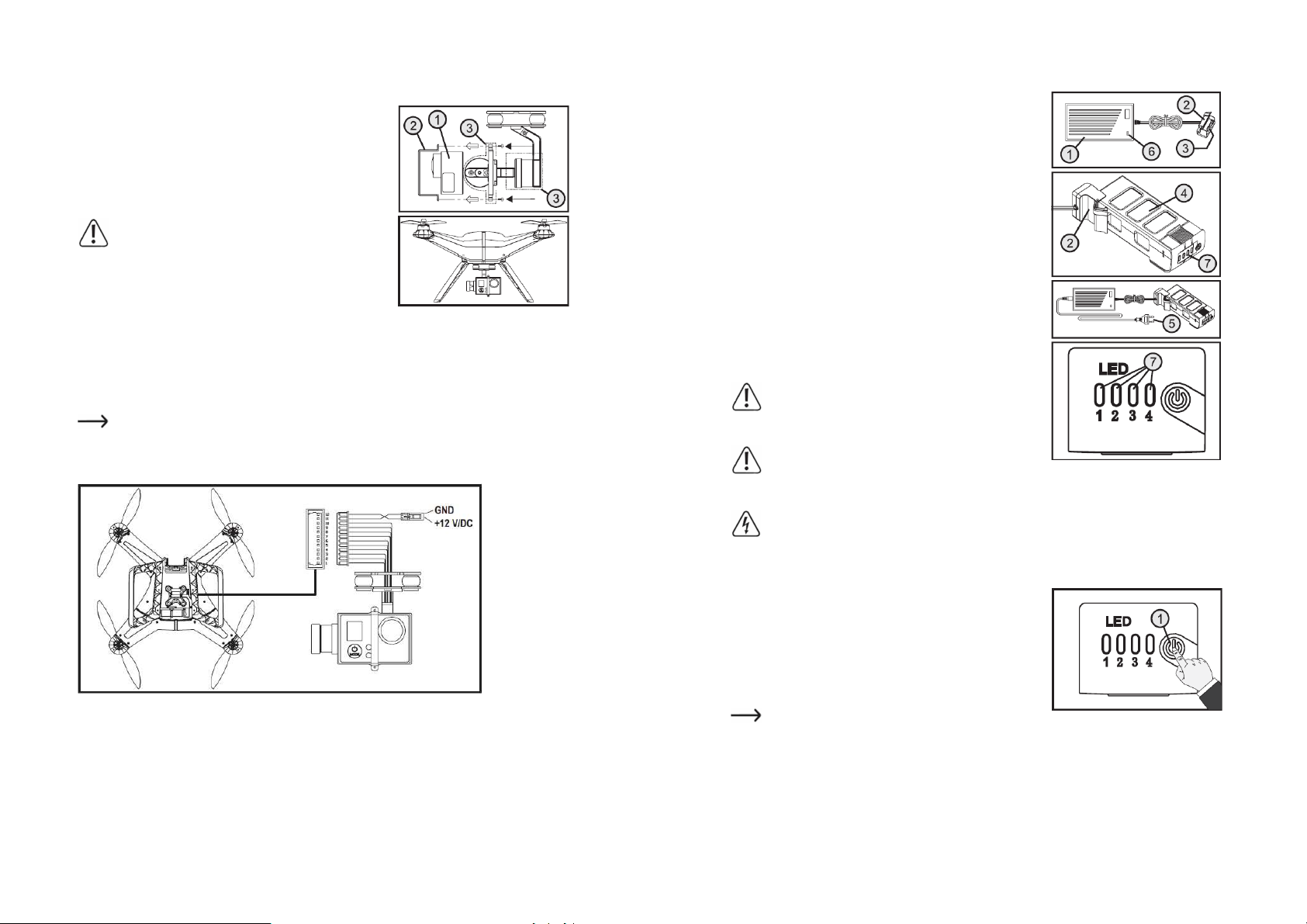
c) Stabilizační držák kamery (2D gimbal)
Na modelu je už nainstalovaný stabilizační držák kamery.
Pokud se zapne letový akumulátor kvadrokoptéry, držák
se automaticky vyrovnává a během letu vykompenzuje
náklony modelu dopředu a do stran.
Při instalaci kamery GoPro nebo jiné vhodné kamery (1)
se musí odstranit držák (2), který se po uložení kamery na
místo musí upevnit dvěma šrouby M2 x 5. Potřebný šroubovák
je součástí dodávky.
2 průsvitné plastové kryty (3), které se zezadu
a zboku namáčknou na držák kamery, slouží jen
k ochraně gimbalu během přenášení kvadrokoptéry.
Tyto kryty se musí před vložením letového akumulátoru nebo
kamery odstranit. V opačném případě se gimbal nebude moci
pohybovat a zničí se!
Nikdy nepoužívejte držák kamery (gimbal) bez vložené kamery. Absence hmotnosti kamery způsobí,
že gimbal nebude vyvážený a na ovládací elektroniku se bude přenášet příliš velká síla. Může to vést
k poškození elektroniky.
Pokud je potřeba držák kamery z kvadrokoptéry odstranit, odpojte 12 pinový konektor z příslušné
přípojky v modelu. Samotný držák je připevněn k tělu kvadrokoptéry čtyřmi šrouby.
K napájení volitelného vysílače video signálu se používá dvojpinový konektor s červeným
a černým kabelem (červený = +12 V DC, černý = uzemnění). Suchý zip pro připevnění video
vysílače je součástí dodávky.
Obrázek 4
Obrázek 3
d) Nabíjení letového akupacku
Letový akupack s 3 články se nabíjí pomocí přiložené napájecí
jednotky (1). Otevřete kryt nabíjecího adaptéru (2), abyste
uviděli dva velké nabíjecí kontakty (3).
Podle dvou prostředních ilustrací na obrázku 5 připojte letový
akumulátor (4) k nabíjecímu adaptéru.
Po připojení napájecího kabelu k napájecí jednotce připojte
konektor napájecího kabelu do vhodné síťové zásuvky.
Rozsvítí se červená LED kontrolka na napájecí jednotce, která
signalizuje, že probíhá nabíjení. 4 LED kontrolky na letovém
akumulátoru (7) současně ukazují stav nabití.
Pokud je letový akumulátor vybitý, svítí jen jedna LED
kontrolka. Postupem nabíjení začne nejdříve blikat LED 2
a posléze zůstane svítit. Jak nabíjení pokračuje, opakuje se to
s LED 3 a LED 4. Před ukončením nabíjení trvale svítí
všechny 4 LED kontrolky.
Když se letový akumulátor plně nabije všechny 4 LED na
letovém akumulátoru (7) zhasnou a LED kontrolka na napájecí
jednotce (6) bude svítit zeleně.
Po dokončení nabíjení odpojte letový akumulátor
od nabíjecího adaptéru a konektor napájecího kabelu
vytáhněte ze síťové zásuvky.
Připojovací kabel nabíjecího adaptéru je na ilustracích
obrázku 5 zobrazen ve svinutém stavu.
Před zahájením nabíjení ´je však potřeba odstranit
stahovací drátek a kabel rozvinout.
Během nabíjení umístěte Li-Pol akumulátor
na ohnivzdorný podklad, případně do vhodné
keramické nádoby. Nikdy nenechávejte nabíjecí
akumulátor nabíjet bez dozoru.
Napájecí jednotka a napájecí kabel se musí používat pouze na suchých místech uvnitř
místnosti. Nesmí se namočit ani navlhnout. Nikdy se ho nedotýkejte mokrýma nebo vlhkýma
rukama. Hrozí nebezpečí smrtelného úrazu elektrickým proudem!
Obrázek 5
e) Test stavu nabití akumulátoru
Stav nabití letového akumulátoru můžete snadno kdykoli
zkontrolovat.
Stiskněte krátce tlačítko on/off (1) na letovém akumulátoru.
4 LED kontrolky na akumulátoru budou asi 2 sekundy
ukazovat aktuální stav nabití.
Pokud je letový akumulátor vybitý, svítí jen jedna LED
kontrolka. Při částečném vybití akumulátoru může např. svítit
LED 1 a LED 2 a LED 3 může blikat.
Zobrazení napětí nad 4 LED kontrolkami na letovém
akumulátoru slouží jen hrubou orientaci.
Přesné napětí akumulátoru můžete během provozu
najít na displeji vysílače.
Obrázek 6
Page 4
Popis a ovládací prvky vysílače
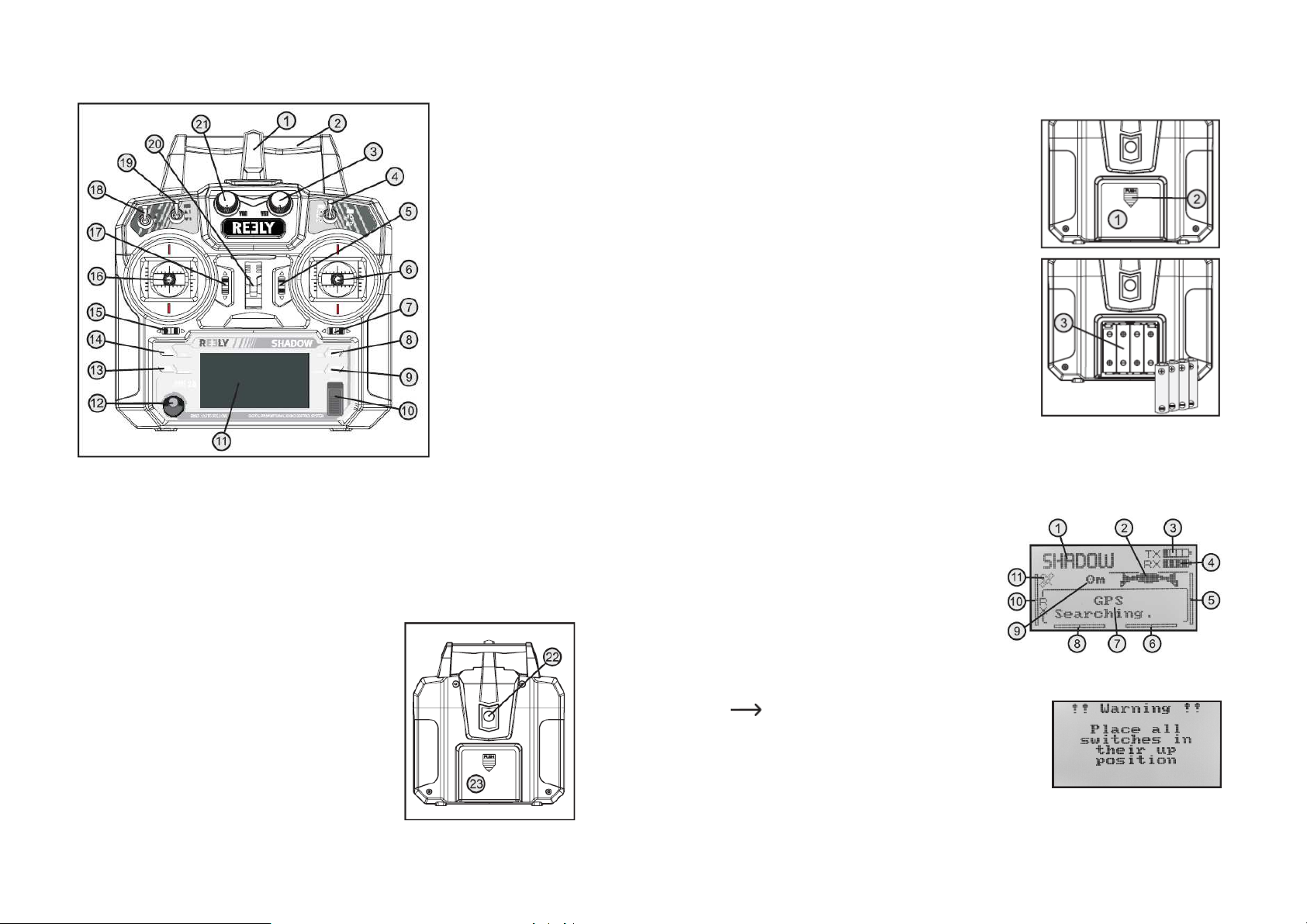
Obrázek 7
Přední strana (obrázek 7):
1. Anténa vysílače
2. Držadlo s integrovanou druhou anténou vysílače
3. Otočný ovladač „VRB“
4. Přepínač „GPS“
5. Trimovací tlačítko funkce letu dopředu a dozadu (Nod)
6. Ovládací páka letu dopředu – dozadu a klopení do stran
7. Trimovací tlačítko funkce klopení do stran (Roll)
8. Tlačítko „OK“
9. Tlačítko „CANCEL“
10. Přepínač „ON/OFF“
11. LCD displej
12. Tlačítko „BIND/AUTO/ FOLLOW“
13. Tlačítko „DOWN“
14. Tlačítko „UP“
15. Trimovací tlačítko funkce otáčení (Yaw)
16. Ovládací páka otáčení a letové výšky
17. Trimovací tlačítko letové výšky (Pitch)
18. Přepínač „IOC“
19. Přepínač „GO HOME“
20. Ouško pro připevnění na pásek
21. Otočný ovladač „VRA“
Zadní strana (obrázek 8):
22. Zdířka pro připojení GPS přijímače
23. Kryt schránky baterií
Obrázek 8
Uvedení vysílače do provozu
a) Vložení baterií
K napájení vysílače budete potřebovat 4 alkalické baterie
velikosti AA (např. obj. č. 65 25 07, balení po 4 ks, nutné
objednat 2 balení).
Při vkládání baterií postupujte následujícím způsobem:
Kryt schránky baterií (1) je umístěn na zadní straně
vysílače. Stiskněte vroubkovanou plochu (2) a zatlačte kryt
směrem dolů.
Dávejte pozor, abyste při vkládání zachovali správnou
polaritu baterií. Příslušné označení (3) je umístěno v dolní
části šachet jednotlivých baterií.
Poté nasuňte kryt schránky zespodu na původní místo,
aby západka zaklapla na místo.
b) Zapnutí vysílače
Pokud jste vložili 4 nové baterie, zkontrolujte polohu
přepínačů. Všechny musí být v přední, resp. v horní poloze.
2 ovládací páky jsou udržovány v střední poloze sílou
pružiny. Nyní přepínačem ON/OFF (viz obr. 7, bod 10)
zapněte vysílač.
Nejdříve se ozvou 3 zvukové signály se zvyšující se výškou tónu a rozsvítí se podsvícení displeje.
Podsvícení se automaticky vypíná asi 20 sekund po aktivaci, nebo po stisku posledního tlačítka.
Pokud se během 60 sekund nepoužije žádný provozní prvek, vysílač vydá jako upozornění krátký
zvukový signál.
Na displeji se zobrazují následující prvky:
1. Název modelu
2. Obrázek typu modelu
3. Symbol baterie se znázorněním napětí vysílače
4. Symbol baterie se znázorněním napětí vysílače
5. Zobrazení trimování letu dopředu a dozadu
6. Zobrazení trimování letu do stran
7. Oblast pro zobrazování informací o stavu
8. Zobrazení trimování otáčení
9. Zobrazení vzdálenosti v režimu „Following“
10. Zobrazení trimování letové výšky
11. Zobrazení přijmu signálu GPS na vysílači*
* Toto zobrazení se ukazuje, jen když se k vysílači připojil přijímač GPS.
Pokud některý z přepínačů (viz obr. 7, body 4, 18
a 19) není v přední poloze, ozvou se při zapnutí
vysílače varovné signály a na displeji se zobrazí
upozornění (viz obrázek 11).
Všechny provozní prvky displeji, které jsou znázorněny na
obrázku 10, se zobrazí jen v případě, že je zapnutý jak vysílač,
tak přijímač.
Obrázek 9
Obrázek 10
Obrázek 11
Page 5
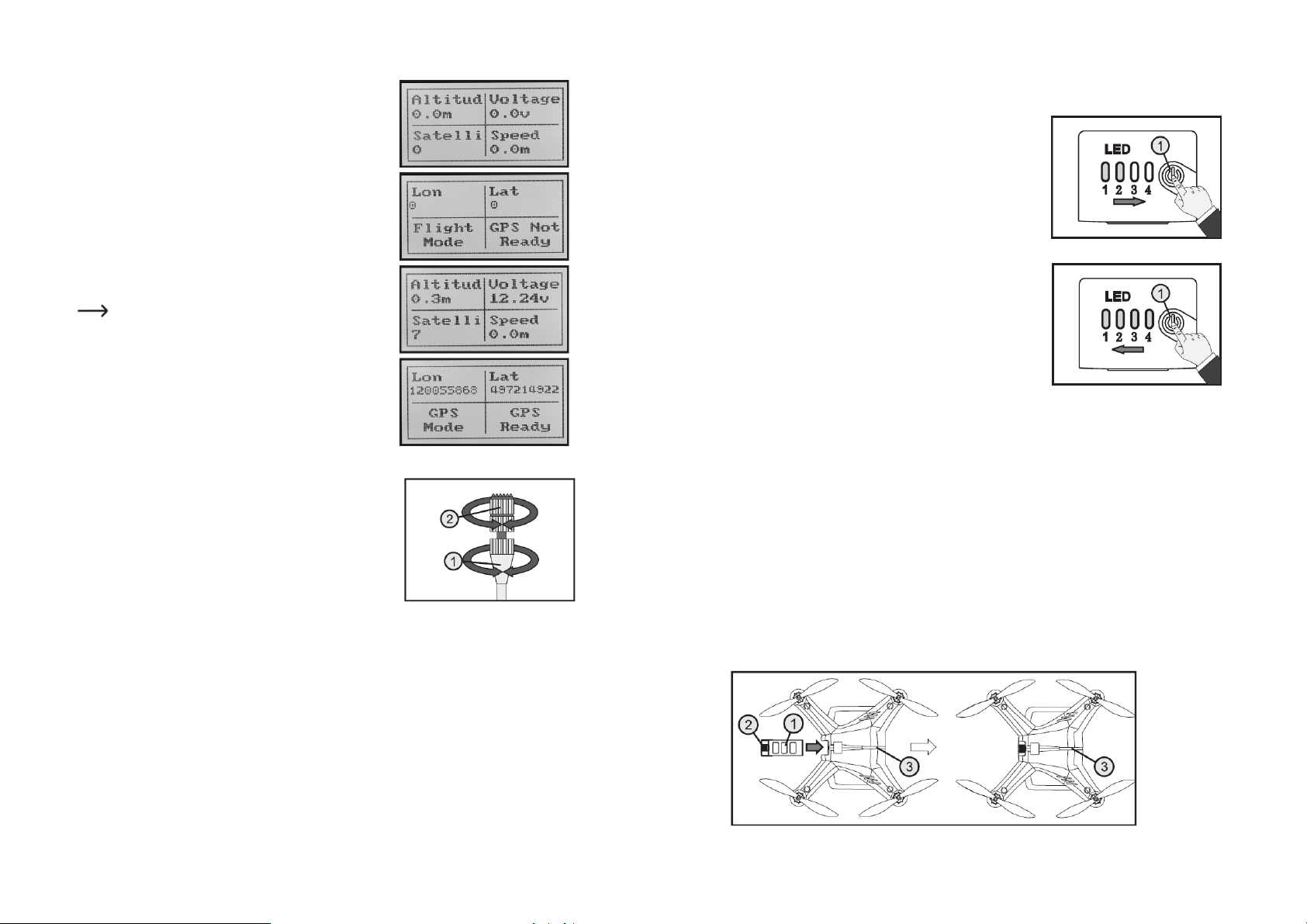
Stiskem tlačítka „UP“ nebo „DOWN“ se střídavě otevřou další
Obrázek 13
dvě okna.
Letová výška „Altitud“
Napětí letového akumulátoru „Voltage“
Počet přijímaných satelitů „Satelit“
Letová rychlost „Speed“
V druhém okně se ukazují následující informace:
Zeměpisná délka „Lon“
Zeměpisná šířka „Lat“
Letový režim
Režim „GPS“
Příklad na obrázku 12:
Dvě horní okna ukazují zobrazení bez příjmu signálu GPS.
Dvě spodní okna ukazují zobrazení, když má kvadrokoptéra
příjem GPS.
Když jsou baterie vy vysílači slabé a neumožňují jeho
správný provoz (napětí baterií je nižší než 4,2 V), symbol
baterie na displeji začne blikat a v pravidelných intervalech
uslyšíte výstražnou signalizaci. V takovém případě byste měli
model přestat používat.
Když napětí klesne pod 4,0 V, vysílač začne vydávat
nepřerušovaný varovný signál. V tomto případě se musí
provoz modelu co nejrychleji zastavit. Abyste mohli pokračovat
v létání, musíte do vysílače vložit nové baterie.
Obrázek 12
c) Nastavení délky ovládací páky
V závislosti na svém stylu ovládání si můžete v případě potřeby
upravit délku ovládacích pák.
Jednoduše podržte dolní část páky (1) a horní část páky (2)
otočte nahoru proti směru hodinových ručiček.
otáčením dolní části páky si nyní můžete nastavit její délku.
Nakonec opačným otáčením horní části páku znovu utáhněte.
Uvedení kvadrokoptéry do provozu
Před prvním uvedením kvadrokoptéry do provozu si pozorně přečtěte následující část návodu.
Motory byste měli nastartovat a s modelem vzlétnou až poté, kdy jste si absolutně jisti, že jste všechna
nastavení provedli správně.
V opačném případě se spojte s nějakým zkušenějším pilotem modelů a požádejte ho o pomoc
s uvedením kvadrokoptéry do provozu. Doporučujeme použít také nějaký letový simulátor, na kterém
si můžete bezpečně natrénovat první kroky létání s modelem.
a) Kontrola funkce aktivace a deaktivace letového akumulátoru
Předtím než do modelu vložíte letový akumulátor, zkontrolujte funkci aktivace a deaktivace elektroniky
letového akumulátoru.
Zapnutí
Pro zapnutí letového akumulátoru stiskněte krátce tlačítko
ON/OFF (1) na akumulátoru a hned ho uvolněte. Pokud je
akumulátor plně nabitý, rozsvítí se všechny čtyři LED.
Nyní stiskněte znovu tlačítko ON/OFF (1) a podržte ho
stisknuté. Čtyři LED zhasnou a postupně se zase rozsvítí
v pořadí LED 1 až LED 4.
Když svítí všechny 4 LED, tlačítko znovu uvolněte. Letový
akumulátor je nyní zapnutý a na kontaktech je napětí.
Vypnutí
Když je akumulátor zapnutý, stiskněte krátce tlačítko ON/OFF
Obrázek 14
(1) na akumulátoru a hned ho uvolněte. Čtyři LED akumulátoru
třikrát zablikají.
Během blikání stiskněte znovu tlačítko ON/OFF (1) a podržte
ho stisknuté. Čtyři LED začnou svítit a postupně zhasnou
v pořadí LED 4 až LED 1.
Když zhasne jako poslední LED 1, tlačítko znovu uvolněte.
Letový akumulátor je vypnutý a jeho kontakty jsou bez napětí.
b) Vložení letového akumulátoru do kvadrokoptéry
Aby se zajistil dobrý příjem signálu ze satelitů, kvadrokoptéra by se měla uvádět do provozu na
Obrázek 15
místech, kde příjem signálů GPS není rušen vedením vysokého napětí, stožáry vysílačů nebo jinými
překážkami.
Vyhýbejte se vysílačům a dalším zařízením, která mohou negativně ovlivňovat elektromagnetické
podmínky a příjem signálu.
Aby se zajistil ničím nerušený letový provoz, na místě létání by se neměly vyskytovat ani překážky,
jako jsou budovy nebo stromy.
Pro létání si zvolte den, kdy je dobré počasí a co nejslabší vítr.
Předtím než do modelu vložíte letový akumulátor, zkontrolujte jeho nabití. Stiskněte krátce tlačítko
ON/OFF (1) na akumulátoru a na 2 sekundy se rozsvítí všechny 4 LED.
Zapněte dálkový ovladač a na displeji zkontrolujte jeho správnou funkčnost. Zobrazení trimovacích
funkcí (viz obrázek 10, body 5, 6, 8 a 10) musí být v střední poloze. Pokud tomu tak není, musí se
trimování nastavit (viz níže 11. g).
Otočte ovladač „VRB“ do střední polohy, resp. zkontrolujte, zda je v střední poloze.
Nyní vložte vypnutý letový akumulátor (viz obr. 16, bod 1) do kvadrokoptéry stranou, na které jsou
nabíjecí kontakty. Lehce zatlačte na vroubkovanou plochu mechanické pojistky akumulátoru
(viz obr. 16, bod 2), aby se západka pojistky zajistila a bezpečně držela.
Pokud se letový akumulátor vloží do kvadrokoptéry a pevně drží, zapněte ho tlačítkem ON/OFF
(viz obr. 6, bod 1), aby se aktivovalo napájení kvadrokoptéry.
Obrázek 16
Page 6

LED kontrolky stavu (viz obr. 16, bod 3) se rozsvítí žlutě (červeně a zeleně) a proběhne interní test
systému kvadrokoptéry. Po chvilce zablikají LED kontrolky na spodní straně ramen a kvadrokoptéra
vydá krátký zvukový signál.
Gimbal natočí držák kamery do výchozí polohy a LED kontrolky krátce zablikají, poté zhasnou
a začnou blikat. Význam signalizace blikání popisujeme podrobněji níže.
Pokud je propojení vysílače a přijímače v pořádku, na displeji dálkového ovladače se ukáže napětí
přijímače (viz obr. 10, bod 4). Stiskněte tlačítko „UP“, nebo „DOWN“, abyste získali další informace
k aktuálnímu příjmu GPS signálu ze satelitu.
c) Kalibrace kompasu
Kvadrokoptéra je vybavena kompasem, jehož pomocí
se může kontrolovat směr letu a letová výška.
Před startem modelu se musí kompas kalibrovat.
Vyberte si k tomu volné prostranství a postupujte podle níže
uvedených kroků:
Pětkrát rychle přepněte přepínač „GPS“ z přední polohy
(poloha 1) do zadní polohy (poloha 2) a nazpět. LED
kontrolky stavu kvadrokoptéry musí trvale svítit žlutě
(červeně a zeleně).
Držte kvadrokoptéru ve vodorovné poloze (viz obr. 17,
ilustrace A) a otáčejte ji kolem svislé osy, dokud LED
kontrolky nebudou svítit zeleně (minimálně o 360 stupňů).
Poté podržte model svisle předními vrtulemi směrem dolů
a otočte ho o 360 stupňů kolem podélné osy (viz obrázek
17, ilustrace B), dokud LED kontrolky stavu nezhasnou.
Kalibrace je dokončena.
Vraťte model do normální polohy.
Po chvilce začnou LED kontrolky stavu v závislosti
na příjmu GPS signálu blikat.
V případě, že LED kontrolky stavu blikají červeně a žlutě,
kalibrace neproběhla správně a musí se zopakovat.
d) Základní informace k ovládání kvadrokoptéry
Předtím než necháte svůj model poprvé vzlétnout, měli byste se dokonale seznámit s možnostmi
ovládání, abyste mohli s modelem bezpečně létat.
Kvadrokoptéra se ovládá dvěma ovládacími pákami na dálkovém ovladači (vysílači). Ve výchozím
nastavení z výroby jsou obě ovládací páky nastaveny na režim 2 („mode 2“).
Pokud chcete používat jiné nastavení pák, můžete si ho kdykoli přizpůsobit. Podrobnější informace
k nastavení ovládacích pák najdete níže v části „Programování dálkového ovladače“.
Ovládací režim „Mode 2“ nabízí následující funkce:
Funkce stoupání a klesání (Pitch)
Pomocí této funkce ovládáte letovou výšku kvadrokoptéry (viz obr. č. 18). Ovládání se provádí levou
ovládací páčkou (viz také obr. č. 7, bod 16). Na rozdíl od jiných systémů ovládání, na kterých můžete
ovládací pákou letové výšky pohybovat dopředu a dozadu, aniž by se vracela do střední polohy sílou
pružiny, tato páčka se automaticky vrací do střední pozice.
Pokud zatlačíte páčku ovládání letové výšky ze střední polohy směrem nahoru, kvadrokoptéra stoupá.
Pokud se ovládací páka vychýlí směrem dolů, kvadrokoptéra klesá.
Pokaždé, když se ovládací páka vrátí do střední polohy, z dálkového ovladače se ozve zvukový
signál.
Pokud je páka nastavena ve střední poloze, model by se měl vznášet na jednom místě
Obrázek 17 - A
Obrázek 17 - B
.
Obrázek 18
Funkce Otáčení (Yaw)
Otáčení modelu kolem svislé osy. K tomuto pohybu dochází buď nechtěně kvůli změně rychlosti
točivého momentu dvojic vrtulí, které se točí doprava a doleva, nebo úmyslně při změně směru letu.
Je způsoben vzájemnou změnou rychlosti jednotlivých motorů.
Pokud pohnete ovládací pákou této funkce (viz obr. 7, bod 16) doleva, model se otočí doleva.
Elektronika v modelu zvýší otáčení vrtulí, které se točí doprava (ve směru hodinových ručiček)
a současně se sníží rychlost vrtulí, které se točí doleva (proti směru hodinových ručiček).
Tímto způsobem zůstává celková vztlaková síla stejná, ale na model působí jen jedna točivá síla,
a proto se otáčí kolem svislé osy doleva (viz obr. 19).
Když pohnete ovládací pákou doprava, změny rychlosti otáčení vrtulí budou přesně opačné a model
se bude otáčet doprava.
Obrázek 19
Funkce klopení do stran (Roll)
Tato funkce vám umožňuje pohybovat modelem do stran (viz obrázek 20). K ovládání pohybu použijte
pravou ovládaví páku (viz také obr. 7, bod 6).
Posunete-li pravou ovládací páku mírně doleva, elektronika v modelu změní rychlost vrtulí a model se
bude posouvat pomalu bokem směrem doleva. Pokud posunete páku doprava, model se bude
posouvat bokem směrem doprava.
Obrázek 20
Page 7

Funkce letu dopředu a dozadu (Nod)
Obrázek 21
Tato funkce vám umožňuje pohybovat modelem dopředu a dozadu (viz obr. 21) a ovládá se také
pravou ovládací pákou (viz také obr. 7, bod 6).
Pokud zatlačíte pravou ovládací páku mírně dopředu, elektronika v modelu změní rychlost vrtulí
a model se začne pohybovat dopředu. Když páku zatáhnete směrem dozadu, model se začne
pohybovat dozadu.
e) Nastavení přepínačů
Předtím než necháte svůj model poprvé vzlétnout, zkontrolujte polohu 3 přepínačů: „IOC“
(viz také obr. 7, bod 18), „GO-HOME“ (viz také obr. 7, bod 19) a „GPS“ (viz také obr. 7, bod 4).
Všechna přepínače musí být v přední nebo v horní poloze, jak ukazuje obrázek 22. Při této kombinaci
nastavení přepínačů se let modelu stabilizuje pomocí GPS a je to ideální způsob letu pro první
zkušební lety venku, v otevřeném prostoru.
Pokud chcete s modelem létat uvnitř místnosti (např. v hale, nebo ve větší místnosti), musíte přepínač
„GPS“ přepnout do spodní polohy.
Vzhledem k tomu, že při létání uvnitř místností nemá model podporu GPS, začátečníci a piloti,
kteří nemají dostatek zkušeností, by měli s kvadrokoptérou nejdříve létat venku a s podporou
GPS. Podrobněji viz níže.
Přepínače mají následující funkce:
Poloha nahoře/vpředu Střední poloha Zadní/spodní poloha
Přepínač „IOC“ Funkce vypnuta Režim „POI“ Režim „Home Lock Mode!
Přepínač „GO-HOME“ Funkce vypnuta - Funkce zapnuta
Přepínač „GPS“ Funkce zapnuta - Funkce vypnuta
Podrobný popis jednotlivých funkcí najdete níže v částech 11 až 13.
f) Start
Stůjte za modelem.
Kvadrokoptéra by měla být otočena ukazatelem napětí
letového akumulátoru (čtyři LED) směrem k vám.
Zkontrolujte kontrolky napětí letového akumulátoru
a dálkového ovladače a také polohu přepínačů (poloha
vepředu/nahoře).
Počkejte, dokud model nezíská signál alespoň z 6 satelitů
a neuloží si místo startu. LED kontrolky stavu budou blikat
přibližně každých 5 sekund a kvadrokoptéra je připravena
k startu.
Posuňte levou ovládací páku dolů a doprava a současně
pravou ovládací páku dolů a doleva (viz obr. 23).
Když motory nastartují, vraťte obě ovládací páky bez prodlevy znovu do střední polohy.
LED, které jsou zespodu na předních ramenech, svítí bílou barvou a LED na zadních ramenech
svítí červeně.
Obrázek 23
Nikdy nepohybujte oběma ovládacími pákami současně, když kvadrokoptéra visí ve vzduchu
nebo stojí na zemi a motory běží. Způsobilo by to, že vrtule se zastaví a model se poškodí při
pádu nebo se převrátí dozadu.
Zatlačte levou ovládací páku pro kontrolu letové výšky pomalu dopředu. Zvýší se rychlost otáčení
vrtulí a model se vznese do vzduchu.
Když vrátíte ovládací páku do střední polohy, kvadrokoptéra zůstane viset ve vzduchu.
Dejte pozor, abyste levou ovládací páku nevychýlili až příliš ze střední polohy, protože model
by vystoupal velmi rychle, nebo by velmi rychle klesl.
Nikdy se nepokoušejte zachytit letící model rukou. Hrozí přitom nebezpečí poranění.
Proveďte opatrně první pohyby pro ovládání směru ve výšce asi 1 – 2 m nad zemí a sledujte,
jak kvadrokoptéra reaguje na pohyby ovládacích pák.
Chcete-li s modelem znovu přistát, zatáhněte levou ovládací páku ze střední polohy nepatrně
směrem dozadu, aby model pomalu snížil letovou výšku a přistál.
Pokud se kvadrokoptéra dotkne země, zatáhněte levou ovládací páku úplně směrem k době
(dolů) a držte ji v této poloze. Když se motory vypnou a vrtule se zastaví, vraťte ovládací páku
do střední polohy.
Během letu neustále sledujte 4 LED kontrolky napětí letového akumulátoru.
S prodlužující se dobou letu začne nejdříve blikat LED 4 a posléze úplně zhasne.
Poté se to postupně opakuje s LED číslo 3 a 2.
Nejpozději ve chvíli, pokud už svítí jen LED č. 1, zahajte neprodleně přistání.
V opačném případě zahájí kvadrokoptéra přistání automaticky, aby se zabránilo hlubokému
vybití akumulátoru. LED kontrolky stavu na modelu začnou blikat červeně.
Jako alternativu pro kontrolu stavu letového akumulátoru na LED kontrolkách můžete použít
zobrazení stavu napětí letového akumulátoru na displeji dálkového ovladače.
g) Trimování kvadrokoptéry
Pokud létáte s modelem uvnitř (např. v hale), nebo
v manuálním režimu (s vypnutou funkcí GPS), kvadrokoptéra
se může pohybovat v určitém směru, i když jsou obě ovládací
páky v střední poloze.
Pokud je kvadrokoptéra unášena při visení ve vzduchu
doprava, stiskněte trimovací tlačítko funkce „Roll“ (viz obr. 7,
bod 7) doleva, dokud se kvadrokoptéra nezastaví a nezůstane
nehybně viset ve vzduchu.
Při každém stisku trimovacího tlačítka se ozve zvuková
signalizace. Výška tónu závisí na směru trimování. Střední
poloha je signalizována delším zvukovým signálem.
Nastavená hodnota se automaticky uloží a zůstane v platnosti,
i když se vysílač vypne.
Další tři funkce ovládání můžete v případě potřeby nastavit
stejným způsobem ostatními trimovacími tlačítky (viz obr. 24,
body 5, 15 a 17).
Obrázek 24
h) Přehled signalizace LED kontrolek stavu
Po zapnutí vysílače a letového akumulátoru v modelu kvadrokoptéra provede interní test, při kterém
kontroluje mezi jiným propojení s vysílačem. Během testu svítí LED kontrolky žlutě* a s modelem se
nesmí hýbat.
V případě, že se během testu zjistí závada v propojení, LED kontrolky stavu budou pomalu blikat
zeleně.
Pokud je test propojení s vysílačem v pořádku, reagují LED kontrolky v závislosti na poloze přepínače
„GPS“ následujícím způsobem:
V manuálním režimu (přepínač „GPS“ je v zadní/dolní poloze) bliknou LED jedenkrát žlutě*
a 4x po 2 sekundách červeně. Blikání se opakuje v stejném intervalu.
Page 8

V režimu „GPS“ (přepínač „GPS“ je v přední//horní poloze) bliknou LED 1x žlutě* a několikrát
po 2 sekundách červeně. Pokud se přijme signál ze 4 nebo více satelitů, LED blikají zeleně
a červeně.
Počet červených bliknutí ukazuje na počet přijatých satelitů:
4 červená bliknutí: nedostatečný příjem GPS (nelze létat v režimu GPS)
3 červená bliknutí: přijatý signál ze 4 satelitů
2 červená bliknutí: přijatý signál z 5 satelitů
1 červené bliknutí: přijatý signál z 6 satelitů
Žádné červené blikání: přijatý signál ze 7 nebo více satelitů. LED kontrolky blikají jen zeleně
každých 5 sekund.
Čím víc satelitů bylo přijato, tím přesnější bude automatické určování polohy kvadrokoptéry
během letu.
Letový akumulátor kvadrokoptéry má pevně nastavenou mezní hodnotu minimálního napětí, která
ho chrání před hlubokým vybitím. Pokud napětí akumulátoru klesne pod tuto hodnotu,
kvadrokoptéra automaticky přistane a LED kontrolky stavu budou rychle blikat červeně.
V případě, že kvadrokoptéra nemá příjem signálu z dálkového ovladače, LED kontrolky stavu
budou rychle blikat zeleně.
Pokud je kvadrokoptéra v bezletovém pásmu, LED kontrolky stavu budou rychle blikat 10 x
s pauzou 2 sekundy a toto schéma blikání se nepřetržitě opakuje.
V případě, že se kvadrokoptéra vyskytuje v prostředí s elektromagnetickým vlněním, kde dochází
k rušení signálu, LED kontrolky stavu svítí červeně.
Pokud kvadrokoptéra úspěšně uložila letové koordináty, LED kontrolky stavu rychle zablikají 20 x
zeleně.
Pokud kvadrokoptéra úspěšně uložila místo startu, LED kontrolky stavu rychle zablikají 20 x
červeně.
Když kvadrokoptéra úspěšně uložila místo zájmu, LED kontrolky stavu rychle zablikají 20 x žlutě*.
* Pro zobrazení žluté barvy používají LED kontrolky stavu současně červenou a zelenou barvu.
Protože LED nejsou těsně vedle sebe, není efekt žluté barvy tak jasný, jako když se používá
samostatně červená nebo zelená barva.
Přehled letových režimů
Kvadrokoptéra má několik letových režimů, které lze aktivovat přepínačem.
a) Manuální režim
Manuální režim je vhodný pro létání uvnitř místností, kde není z konstrukčních důvodů příjem GPS
signálu. Kvadrokoptéru lze ovládat ve všech směrech, ale kvůli absenci GPS není dostupná
automatická korekce letové polohy.
b) Režim „GPS“
Režim „GPS“ je ideálním řešením pro první lety venku, kde je dobrý příjem signálu GPS.
Kvadrokoptéru lze ovládat ve všech směrech a automaticky se provádí korekce letové polohy,
tj. pokud dáte ovládací páky do středové polohy, model automaticky zachovává poslední polohu
a letovou výšku. V režimu „GPS“ můžete aktivovat funkci „IOC“ (Intelligent Orientation Control“).
c) Funkce inteligentního ovládání „IOC“
V běžném režimu bez funkce „IOC“ se směr pohybu kvadrokoptéry určuje podle její přední strany, kde
jsou LED kontrolky stavu. Když se pak díváme model seshora, tak např. pokyn ovládací páky k letu
dopředu bude vždy způsobovat let ve směru, kde je právě přední strana kvadrokoptéry (bez ohledu na
to, kam přední strana právě směruje).
Může to způsobovat problémy při řízení, když je např. přední strana kvadrokoptéry (se stavovými
LED) otočena směrem k pilotovi. V takovém případě se totiž model pohybovat opačně proti pohybu
ovládacích pák (z pohledu pilota).
Obrázek 25
Aktivuje-li funkce „IOC“, model reaguje na pohyby ovládacích pák bez ohledu na orientaci samotné
kvadrokoptéry a pohybuje se ve směru který je určen ve funkci inteligentního řízení.
Použití funkce „IOC“ vyžaduje, aby kvadrokoptéra měla příjem GPS signálu z více než
6 satelitů a zároveň byla alespoň 5 m od místa startu. Pak máte k dispozici celkem 3 letové
režimy:
Režim „CL“ (= „Course Lock“)
Režim „HL“ (= „Home Point Lock“)
Režim „POI“ (= „Point of Interest“)
Pokud je kvadrokoptéra v režimu „IOC“ a je od vás hodně vzdálená, nepoužívejte opakovaně přepínač
IOC, protože se tím vymažou a přepíšou uložené hodnoty a například výchozí bod pro návrat bude
úplně jiný, než má být (viz také část 12).
d) Režim „CL“
V režimu „CL“ (= „Course Lock“) používá kvadrokoptéra k orientaci při letu vlastní integrovaný
kompas. Když jste např. před startem model natočili přední stranou na cíl letu a jako cíl letu jste určili
věž vzdáleného kostela, poletí stále při řízení směrem vpřed k určenému cíli, tj. ke kostelu.
Pokud pohnete řídicí pákou směrem dopředu, model poletí k cíli, i když se během letu otočil a jeho
přední strana právě směruje jinam.
Obrázek 26
Page 9

e) Režim „HL“
Obrázek 28
Kombinace B
Funkce IOC vypnuta
Režim „CL“
Režim „POI“
V režimu „HL“ (= „Home Point-Lock“) je směr pohybu kvadrokoptéry určován směrem k výchozímu
bodu, tj. k místu startu, kde se v blízkosti nachází i pilot, resp. dálkový ovladač. Bez ohledu na to, kam
směruje přední strana modelu, vždy poletí směrem, kam řídí pilot z pohledu vysílače.
Režim lze aktivovat, když je kvadrokoptéra vzdálena minimálně 5 m od místa startu.
Obrázek 27
f) Režim „POI“
V režimu „POI“ (´“Point Of Interest“) je směr pohybu kvadrokoptéry určován směrem k libovolnému
bodu v terénu, který jste zvolili a ke kterému byla kvadrokoptéra při startu nasměrována čelem.
Řízením doleva nebo doprava můžete směr, kterým má model kroužit kolem daného bodu v terénu.
Řízení dopředu (k bodu zájmu) a dozadu (dále od bodu zájmu) ovlivňujete diametr okruhu, v kterém
model létá. Dostupný rádius je v rozsahu 5 – 500 m.
Aktivace letových režimů
Funkce „IOC“ se zapíná a vypíná přepínačem „IOC“, kterým se přepínají také příslušné letové režimy.
Přepínači můžete podle potřeby přiřadit 3 kombinace. Ve výchozím nastavení z výroby je přepínač
nastaven na kombinaci, která je v níže uvedené tabulce označena písmenem C.
Přepínač „IOC“
Poloha přepínače
vpředu/nahoře
Střední poloha přepínače
Poloha přepínače
vzadu/dolů
Kombinace A Funkce IOC vypnuta Režim „CL“ Režim „HL“
Kombinace C Funkce IOC vypnuta Režim „POI“ Režim „HL“
Chcete-li použít režim „CL“, kvadrokoptéra musí být naprogramována na kombinaci A,
nebo na kombinaci B.
Software, který je k tomu potřeba si můžete bezplatně stáhnout v sekci příslušného výrobku
na stránce www.conrad.com. Kabel pro připojení kvadrokoptéry k počítači je součástí dodávky.
Aby kvadrokoptéra mohla aktivovat různé režimy inteligentního ovládání „IOC“, musí si nejdříve
zaznamenat a uložit orientaci při startu, místo startu nebo bod zájmu („Point of Interest“).
Děje se to částečně automaticky, nebo můžete příslušné činnosti provést manuálně.
Režim „CL“
Tento režim je k dispozici, jen když jste přepínač „IOC“ naprogramovali na kombinaci A nebo B.
Poloha a orientace kvadrokoptéry se zaznamená automaticky 36 sekund po vložení letového
akumulátoru. Model musí přijímat signál GPS z více než 6 satelitů.
Když chcete polohu kvadrokoptéry uložit manuálně, musíte 3 až 5 krát přepnout přepínač
„IOC“ dozadu a dopředu (mezi přední/horní a středovou polohou).
Po úspěšném uložení polohy a orientace 20 x rychle po sobě zablikají zelené LED kontrolky stavu.
Režim „HL“
Tento režim je k dispozici, jen když jste přepínač „IOC“ naprogramovali na kombinaci A nebo C.
Jako výchozí bod („Home Point“) se při startu automaticky uloží bod, kdy poprvé pohnete ovládací
pákou letové výšky dopředu a kvadrokoptéra se zvedne do vzduchu.
Předpokladem pro uložení výchozího bodu je, že model přijímá po dobu alespoň 10 sekund signál
GPS z více než 6 satelitů.
Když chcete polohu kvadrokoptéry uložit manuálně, musíte 3 až 5 krát přepnout přepínač
„IOC“ dozadu a dopředu (mezi zadní/spodní a středovou polohou).
Po úspěšném uložení výchozího bodu 20 x rychle po sobě zablikají červené LED kontrolky stavu.
Režim „POI“
Tento režim je k dispozici, jen když jste přepínač „IOC“ naprogramovali na kombinaci B nebo C.
Místo zájmu je možné uložit jen manuálně. Předpokladem pro uložení místa je, že model přijímá
po dobu alespoň 10 sekund signál GPS z více než 6 satelitů.
Pro manuální uložení místa zájmu přepněte 3 až 5 krát přepínač „IOC“ dozadu a dopředu
(mezi přední/horní a středovou polohou).
Pokud se používá kombinace B, přepínač „IOC“ se musí 3 až 5 krát přepnout dozadu a dopředu
(mezi zadní/spodní a středovou polohou).
Po úspěšném uložení místa zájmu 20 x rychle po sobě zablikají žluté LED kontrolky stavu.
Funkce pro návrat domů („Go-Home“)
Kvadrokoptéra je vybavena funkcí „Go-Home“, která umožňuje, aby se vrátila na místo startu, a to buď
automaticky, nebo pokyn příkazu z dálkového ovladače. Předpokladem použití funkce je, že se uložilo
místo startu (viz výše „Režim HL“) a že kvadrokoptéra létá v režimu GPS a přijímá signál z více než
6 satelitů. Vzdálenost mezi kvadrokoptérou a místem startu musí být zároveň větší než 5 metrů.
Pokud se přepínač funkce „Go-Home“ přepne do zadní/spodní polohy, kvadrokoptéra se více
nebo méně otočí a zůstane asi 3 sekundy viset ve vzduchu.
Pokud je letová výška kvadrokoptéry nižší než 20 m, model nejdříve vystoupá do výšky 20 m a poté
zahájí návrat na uložené místo startu. Když se model pohybuje v letové výšce nad 20 m, okamžitě se
vrátí na místo startu.
Obrázek 29
Page 10

Obrázek 31
Pokud se kvadrokoptéra dostane nad místo startu, rychle sníží letovou výšku na 5 metrů a před
finálním přistáním zůstane asi 3 až 5 sekund viset ve vzduchu.
Obrázek 30
Funkce „Go-Home“ se spouští automaticky, když kvadrokoptéra ztratí a nepřijímá signál GPS.
Pomocí softwaru, který si můžete bezplatně stáhnout v sekci příslušného výrobku na stránce
www.conrad.com, lze nastavit, zda má kvadrokoptéra po ztrátě signálu GPS zahájit návrat na
místo startu, nebo zůstat viset na místě.
Důležité:
Funkce pro návrat domů není dostupná, pokud kvadrokoptéra přijímá signal GPS z méně
než 6 satelitů nebo když není v režimu „GPS“.
V případě, že je kvadrokoptéra v situaci, kdy se špatně ovládá nebo je příliš daleko
od vysílače, aktivujte přepínačem „Go-Home“ funkci pro návrat domů. V žádném případě
vysílač nevypínejte.
Sledujte překážky, které se můžou během automatického návratu objevit v letové dráze.
Tato kvadrokoptéra není vybavená žádnou funkcí pro detekci a vyhýbání se překážkám.
Když kvadrokoptéra přistane, vypněte motory.
Funkce „Following“
Aby kvadrokoptéra mohla sledovat polohu vysílače (dálkového
ovladače), musí být vysílač také vybaven přijímačem signálu
GPS (viz obr. 31, bod 1). Způsob instalace přijímače
na dálkový ovladač je znázorněn na obrázku 31.
Připojovací konektor (obr. 31, bod 2) přijímače GPS se připojí
na zadní stranu dálkového ovladače.
Když se zapne vysílač, ke kterému je připojen přijímač GPS,
začne blikat zobrazení satelitů na levé straně displeje (viz obr.
10, bod 7). Pokud je dostupný signál z více než 7 satelitů,
zobrazení přestane blikat a zůstane svítit.
Uveďte kvadrokoptéru do provozu, kalibrujte kompas a poté ji
přepněte do režimu „GPS“.
Zvedněte kvadrokoptéru do vzduchu a leťte s ní na
požadované místo, z kterého bude sledovat polohu dálkového
ovladače.
Jakmile kvadrokoptéra doletí na požadované místo, stiskněte
tlačítko „BIND/AUTO FOLLOW“ (3). Model se nyní otočí
směrem k vysílači a bude sledovat jeho pohyby při
udržování stejné letové výšky a stejné vzdálenosti od vysílače.
Pro ukončení funkce stiskněte znovu tlačítko „BIND/AUTO
FOLLOW“ (3) a s modelem přistaňte.
Kvadrokoptéra nedokáže rozpoznávat překážky.
Stále udržuje stejnou letovou výšku a stejnou
vzdálenost od vysílače, a to i v případě, že se v její
letové dráze objeví např. stromy nebo jiné překážky.
Dávejte na to pozor, když létáte v režimu „Following“.
Upozornění na podpětí
Během letu kvadrokoptéra neustále kontroluje stav napětí letového akumulátoru. V případě potřeby
můžete aktuální napětí akumulátoru sledovat na dálkovém ovladači (viz horní ilustraci na obrázku 12).
Vzhledem k přenosu dat se však stav akumulátoru zobrazuje s určitou prodlevou.
Když napětí akumulátoru klesne pod určitou hranici, která je nastavena ve výrobě, LED kontrolky
stavu na modelu začnou rychle blikat červeně a kvadrokoptéra automaticky přistane. Dálkový ovladač
bude vydávat nepřerušovaný zvukový signál a na displeji se objeví zpráva s výstrahou. Když chcete
varovnou signalizaci vypnout, musíte nejdříve vypnout kvadrokoptéru a poté vypnout a znovu zapnout
vysílač.
I když během automatického přistání lze ještě po určitou dobu kontrolovat směr letu,
doporučujeme, abyste let neprodlužovali. Sledujte zobrazení napětí letového akumulátoru
a baterií ve vysílači a s modelem včas přistaňte.
Funkce Failsafe
Tato funkce chrání kvadrokoptéru proti nehodě, když se vzdálí z dosahu signálu dálkového ovladače.
V pomocném softwaru můžete nastavit, jak se má model v takovém případě chovat.
Systém automatického ovládání v modelu může nechat kvadrokoptéru viset ve vzduchu na místě,
nebo může zahájit návrat na místo startu a přistát tam.
Funkci „Failsafe“ však můžete použít, jen když má kvadrokoptéra příjem signálu GPS.
V opačném případě model jen stabilizuje letovou polohu a bude udržovat letovou výšku.
Podrobnější informace k funkci najdete v pomocném softwaru.
Page 11

Omezení letových vzdáleností a bezletová pásma
Kvadrokoptéra má z výroby nastavenou maximální vzdálenost 300 metrů a letovou výšku 120 metrů.
Obě hodnoty můžete změnit v pomocném softwaru.
Pokud se maximální vzdálenost překročí o víc než 10 metrů, kvadrokoptéra se automaticky vrátí na
místo startu. Tato funkce však funguje, jen když je kvadrokoptéra v režimu „GPS“ a má příjem signálu
GPS z dostatečného počtu satelitů.
Kvadrokoptéra dokáže také detekovat bezletová pásma. Jedná se o oblasti, které jsou v bezprostřední
blízkosti letišť, vojenských základen a jiných objektů, které vyžadují zvláštní bezpečnostní režim.
Kvadrokoptéra je vybavena digitální mapou, která obsahuje tato bezletová pásma.
Pokud je kvadrokoptéra v režimu „GPS“ dokáže vám spolu s funkcí inteligentního řízení letu říct, že se
dostala do bezletového pásma. V takovém případě 10 x zablikají červené LED kontrolky stavu.
Pokud se kvadrokoptéra dostane do bezletového pásma, přestane reagovat na pokyny z dálkového
ovladače k úpravě letové výšky. Ostatní řídící funkce se však plně zachovají.
Kvadrokoptéra automaticky sníží letovou výšku při poklesu asi 3 m/s, dokud buď automaticky
nepřistane, nebo dokud ji nevyvedete z bezletového pásma.
Reakce na bezletová pásma můžete vypnout nebo zapnout v pomocném softwaru.
Nicméně vám důrazně doporučujeme, abyste ji nevypínali.
Ovládání gimbalu
V dolní části kvadrokoptéry je držák, který je stabilizovaný podél dvou os a kompenzuje náklon modelu
při letu dopředu a dozadu a do stran a umožňuje tak stabilní nahrávání videa za letu.
Kameru lze mimo to naklánět z vodorovné polohy svisle nahoru o 45° a dolů o 135°.
Náklon kamery se ovládá otočným ovladačem VRB (1).
Nikdy nepoužívejte držák kamery (gimbal) bez vložené kamery. Absence hmotnosti kamery
způsobí, že gimbal nebude vyvážený a na ovládací elektroniku se bude přenášet příliš velká
síla. Může to vést k poškození elektroniky.
Funkce párování
V okamžiku dodání je už z výroby vysílač s přijímačem navzájem propojený a můžete je okamžitě
začít používat. Jejich nové párování bude potřebné pouze v případě výměny vysílače, nebo přijímače,
nebo z důvodu odstranění nějaké poruchy.
Pokud se vysílač resetuje na tovární nastavení, musí se propojení obnovit, protože původní
ID přijímače se během resetování vymaže.
Obrázek 32
Obnovení propojení vysílače s přijímačem
Před obnovením propojení vysílače s kvadrokoptérou se musí odstranit čtyři vrtule a musí se odpojit
vrchní část krytu kvadrokoptéry. Odstraňte proto nejdříve podvozek a uvolněte 20 šroubů v dolní části
krytu.
4 šrouby, které jsou pod motory, se nemusí odstraňovat, protože drží jenom motory.
Vysílač a přijímač musí být těsně vedle sebe
(ve vzdálenosti přibližně 50 cm).
Vypněte vysílač.
Odpojte od přijímače dva konektory (1), které propojují
přijímač s kvadrokoptérou.
Připojte přiložený programovací konektor kabelu (2)
k přípojce „B/VCC“ na přijímači.
Přijímač musí být napájen z akumulátoru, který se
připojí k libovolnému výstupu na přijímači (3).
Dejte pozor na správnou polaritu. Záporná přípojka (-)
musí být v dolní části.
Zapněte přijímač a červená LED kontrolka na přijímači
(4) začne rychle blikat.
Stiskněte a podržte tlačítko „BIND/FOLLOW“ (5) na
vysílači.
Na displeji se krátce objeví „RXBinding“ a pokud
propojení proběhne správně, ukáže se „RXBinding OK“.
Poté se displej přepne na normální režim zobrazení.
Červená LED kontrolka na přijímači zůstane svítit
a párování je dokončené. Pokud červená LED nadále bliká, párování neproběhlo správně a musí
se opakovat.
Vypněte nejdříve přijímač a poté vysílač.
Odpojte programovací konektor a připojte znovu k přijímači dva konektory kvadrokoptéry.
Zkontrolujte funkčnost systému.
Přijímač musí nyní reagovat na řídící pokyny z vysílače.
Pokud tomu tak není, zopakujte párování, nebo zkontrolujte digitální kódování.
Obrázek 33
Programování dálkového ovladače
Váš dálkový ovladač nabízí menu nastavení systému
„System setup“ a menu nastavení funkcí „Functions
setup“. V těchto nabídkách může zkontrolovat
nastavení funkcí nebo provést celková nastavení.
Změny příslušných nastavení se provádí čtyřmi
programovacími tlačítky (viz také obrázek 7, body 8,
9, 13 a 14). Nastavení se trvale uloží a zachová
se i po výměně baterií.
Obrázek 34
Funkce provozních prvků
Tlačítko „OK“
Je-li vysílač zapnutý, krátkým stiskem tlačítka „OK“ otevřete menu programování.
Provozní zobrazení na displeji se změní na zobrazení menu a vysílač se přepne do režimu
programování. Tímto tlačítkem se aktivuje také zvolené nastavení.
Tlačítko „CANCEL“
Toto tlačítko vám umožňuje právě otevřenou nabídku nebo podnabídku znovu zavřít.
Po každém krátkém stisku tlačítka se posunete o jeden krok dozadu, až se dostanete k provoznímu
menu. Když se tlačítko stiskne a chvilku podrží, změněné hodnoty nastavení se uloží.
Tlačítka „UP“ a „DOWN“
Pomocí těchto tlačítek vybíráte požadovanou nabídku a podnabídku nebo měníte nastavené hodnoty.
Po každém povoleném stisku tlačítka vydá vysílač krátký zvukový signál.
Page 12

Menu nastavení systému „System setup“
Funkce
Zobrazení
V menu nastavení systému se provádí základní nastavení
systému. Pro otevření menu nastavení stiskněte tlačítko
„OK“ (vysílač musí být zapnutý). Na displeji se ukáže menu
nastavení. Okno pro výběr vedle symbolu dálkového
ovládání ukazuje, že v tomto nastavení můžete otevřít
systémová nastavení „System setup“.
Stiskněte znovu krátce tlačítko „OK“, aby se otevřelo menu
nastavení systému, a ukáže se 5 položek nastavení.
V menu nastavení systému jsou dostupné následující funkce:
Nastavení ovládacích pák „Sticks mode“
Jas displeje „LCD brightness“
Verze softwaru vysílače „Firmware version“
Aktualizace softwaru vysílače „Firmware update“
Resetování na tovární nastavení „Factory reset“
a) Nastavení ovládacích pák
Jak už bylo uvedeno výše v části „Uvedení kvadrokoptéry do provozu“, ovládacím pákám jsou
přiděleny specifické funkce ovládaní. Přenosové kanály vysílače mají následující funkce:
CH1 = kanál 1 (funkce klopení do stran – „roll“)
CH2 = kanál 2 (funkce letu dopředu a dozadu – „nod“)
CH3 = kanál 3 (funkce letové výšky – „pitch“)
CH4 = kanál 4 (funkce otáčení kolem svislé osy – „yaw“)
Při nastavení ovládacích pák můžete určit s kterým přenosovým kanálem se má příslušná páka
používat. Ve výchozím nastavení jsou páky nastaveny na režim 2.
Obrázek 35
Postup při nastavení ovládacích pák
Zapněte vysílač a otevřete menu nastavení systému.
Kurzorem je označena první horní položka menu
„Stick mode“.
Stiskněte krátce tlačítko „OK“, aby se položka aktivovala.
Na displeji se ukáže aktuálně používané přiřazení funkcí.
2 kruhy na displeji znázorňují dvě ovládací páky
s označením přidělených kanálů pro konkrétní pohyby
ovládacích pák.
Stisk tlačítka „UP“ nebo „DOWN“ umožňuje přidělit
požadované ovládací páce některý z režimů 1 až 4
(Mode 1 - Mode 4).
Pro uložení nastavení stiskněte a chvilku podržte tlačítko
„CANCEL“. Poté se znovu zobrazí menu nastavení
systému.
Stiskněte opakovaně tlačítko „CANCEL“, abyste se dostali
zpět k normálnímu provoznímu zobrazení.
Poznámka:
Změny v nastavení ovládacích pák je možné provést, jen
pokud je letový akumulátor odpojen od kvadrokoptéry.
Pokud je kvadrokoptéra v provozu, objeví se na displeji
upozornění, že přijímač se musí nejdříve vypnout – viz
obrázek 37.
Obrázek 36
Obrázek 37
Page 13

b) Jas displeje
Aby byl displej neustále dobře čitelný, můžete si nastavit
úroveň jeho jasu.
Postup při nastavení jasu displeje.
Zapněte vysílač a otevřete menu nastavení systému.
Tlačítkem „UP“, nebo „DOWN“ posuňte kurzor na položku
„LCD brightness“.
Stiskněte krátce tlačítko „OK“, aby se položka aktivovala.
Zobrazí se hodnota aktuálně nastavené úrovně jasu spolu
s grafickým ukazatelem nastavení. Pro lepší odhad
nastavení je v dolní části displeje také symbol
kvadrokoptéry.
Tlačítkem „UP“, nebo „DOWN“ nastavte požadovanou
úroveň jasu. Když stisknete a podržíte tlačítko „OK“,
aktivuje se tovární nastavení.
Pro uložení nastavení stiskněte a chvilku podržte tlačítko
„CANCEL“. Poté se znovu zobrazí menu nastavení
systému.
Stiskněte opakovaně tlačítko „CANCEL“, abyste se dostali
zpět k normálnímu provoznímu zobrazení.
c) Verze softwaru vysílače
V případě potřeby si můžete zobrazit používanou verzi
softwaru a datum jejího vydání. Okamžitě tak zjistíte, zda je
dostupná novější verze softwaru, kterou lze v ovladači použít
(viz další položku menu).
Postup při zobrazení verze softwaru.
Zapněte vysílač a otevřete menu nastavení systému.
Tlačítkem „UP“, nebo „DOWN“ posuňte kurzor na položku
„Firmware ver.“.
Stiskněte krátce tlačítko „OK“, aby se položka aktivovala.
Zobrazí se označení modelu, verze softwaru a datum
jejího vydání.
Stiskněte opakovaně tlačítko „CANCEL“, abyste se dostali
zpět k normálnímu provoznímu zobrazení.
d) Aktualizace verze softwaru vysílače
Aby bylo možné přenést na vysílač novou verzi softwaru, musí
být dálkový ovladač připojen pomocí USB kabelu k počítači
nebo k notebooku a musí být v režimu aktualizace.
Během procesu aktualizace se nesmí zapínat žádný přijímač,
který je propojený s vysílačem.
Postup při aktualizaci verze softwaru.
Zapněte vysílač a otevřete menu nastavení systému.
Tlačítkem „UP“, nebo „DOWN“ posuňte kurzor na položku
„Firmware update“.
Stiskněte krátce tlačítko „OK“, aby se položka aktivovala.
Na displeji se zobrazí zpráva, že vysílač je v režimu
aktualizace a všechny jeho funkce jsou pozastaveny. Pro
pokračování stiskněte tlačítko „OK“, aby se aktivovala
funkce aktualizace.
Obrázek 38
Obrázek 39
Obrázek 40
Po stisku tlačítka „OK“ se objeví bezpečnostní upozornění,
že se chystáte přejít do režimu aktualizace a pozastavit
ostatní funkce.
Tlačítkem „UP“, nebo „DOWN“ vyberte „Yes“, nebo „No“
a dalším stiskem tlačítka „OK“ aktivujte aktualizaci.
Stisk tlačítka není tentokrát potvrzen zvukovým signálem,
ale ztmavnutím displeje a displej ukazuje, že je aktivní
funkce aktualizace. Nyní můžete zahájit přenos dat
z počítače. Během aktualizace nefungují žádná tlačítka na
dálkovém ovladači.
Po dokončení přenosu dat vypněte a znovu zapněte
vysílač.
Protože dálkový ovladač je už z výroby vybaven
nejnovějším softwarem, jeho aktualizace není obvykle
potřeba.
e) Resetování na tovární nastavení
Tato funkce vám umožňuje jedním příkazem vymazat všechna
data a nastavení dálkového ovladače a obnovit jejich výchozí
nastavení.
Pokud použijete tuto funkci, vymažou se všechna
dříve uložená nastavení! Dálkový ovladač se vrátí do
stavu, v kterém byl při dodání a všechna individuální
nastavení se musí provést znovu.
Ztratí se také propojení mezi vysílačem a přijímačem!
Musí se znovu provést párování a k tomu bude
potřeba kvadrokoptéru otevřít. Resetování proto
používejte, jen když je absolutně nezbytné.
Postup při resetování
Zapněte vysílač a otevřete menu nastavení systému.
Tlačítkem „UP“, nebo „DOWN“ posuňte kurzor na položku
„Factory reset“.
Stiskněte krátce tlačítko „OK“, aby se položka aktivovala.
Na displeji se zobrazí zpráva, že vysílač vymaže všechna
nastavení a obnoví jejich výchozí nastavení.
Systém vás požádá, abyste pro pokračování stiskli tlačítko
„OK“.
• Po stisku tlačítka „OK“ se objeví bezpečnostní upozornění.
• Tlačítkem „UP“, nebo „DOWN“ vyberte „Yes“, nebo „No“
a dalším stiskem tlačítka „OK“ aktivujte funkci resetování.
Na displeji se po chvilce znovu ukáže menu nastavení
systému.
• Stiskněte opakovaně tlačítko „CANCEL“, abyste se dostali
zpět k normálnímu provoznímu zobrazení.
Obrázek 40
Obrázek 41
Page 14

Menu nastavení funkcí „Functions setup“
Funkce
Zobrazení
Test kódování
„Display“
Problém
Řešení
V menu nastavení funkcí můžete zkontrolovat funkce
přepínačů a ovládacích prvků a nastavit základní trimování.
Pro otevření nabídky nastavení funkcí stiskněte a podržte
tlačítko „OK“ (vysílač musí být zapnutý). Okno pro výběr vedle
symbolu dálkového ovládání ukazuje, že v tomto nastavení
můžete otevřít nastavení funkcí.
Stiskněte tlačítko „UP“, nebo „DOWN“, aby se vybralo okno
s nástroji.
Stiskněte krátce tlačítko „OK“, aby se položka aktivovalo
nastavení funkcí.
Nyní se zobrazí dvě položky nastavení.
V menu nastavení funkcí jsou dostupné následující funkce:
Základní trimování „Subtrim“
a) Test kódování – „Display“
V tomto menu si může graficky zobrazit ovládací signály všech
10 kanálů. Aktivujete-li ovládací páky, přepínače, nebo otočné
ovladače, můžete pozorovat, jak se mění hodnoty jednotlivých
kanálů a grafické znázornění hodnot.
Při testu postupujte následujícím způsobem:
Zapněte vysílač a otevřete menu nastavení funkcí.
Kurzorem je označena první horní položka menu „Display“.
Stiskněte krátce tlačítko „OK“, aby se položka aktivovala.
Na displeji se ukáže prvních 6 kanálů a jejich aktuální
nastavení kódování.
Pokud nyní posunete ovládací páky nebo přepínače
v různém směru, uvidíte, který kanál se ovládá kterým
směrem.
Tlačítkem „UP“, nebo „DOWN“ můžete okno přepnout na
zobrazení kanálů 7 – 10 a otestovat otočné ovladače
„VRA“ a „VRB“.
Stiskněte opakovaně tlačítko „CANCEL“, abyste se dostali
zpět k normálnímu provoznímu zobrazení.
Protože dálkový ovladač má jen 9 ovládacích funkcí,
kanál č. 10 se vysílačem neovládá.
Pokud během testu ovládacích funkcí stiskněte tlačítko
„CANCEL“, spustí se test serva a na displeji se ukáže grafický
průběh. Kvadrokoptéra se však neovládá servem, a pro tento
test není v případě Shadow FS-16 relevantní.
Obrázek 42
Obrázek 43
b) Základní trimování
Jak už bylo uvedeno výše, trimování modelu probíhá v manuálním režimu (režim „GPS“ je vypnutý),
kdy se může stát, že kvadrokoptéra se samovolně pohybuje v určitém směru, i když jsou ovládací
páky v střední poloze. K trimování se používají čtyři trimovací tlačítka (viz obrázek 7, body 5, 7, 15
a 17).
Základní trimování se může použít jako přednastavení kvadrokoptéry, aby visela stabilně ve vzduchu,
když jsou ukazatele trimování (viz obr. 7, bod 5, 7, 15 a 17)
v středních polohách.
Dříve než začnete s nastavením základního trimování,
zkontrolujte na provozním, displeji, zda jsou
4 ukazatele trimování nastaveny uprostřed rozsahu.
Postup při základním trimování
Zapněte vysílač a otevřete menu nastavení funkcí.
Tlačítkem „UP“, nebo „DOWN“ posuňte kurzor na položku
„Subtrim“.
Stiskněte krátce tlačítko „OK“, aby se položka aktivovala.
Na displeji uvidíte 6 položek ovládacích funkcí
s příslušnými, právě používanými trimovacími hodnotami.
Tlačítkem „UP“, nebo „DOWN“ vyberte základní trimování
kanálu 1.
Po stisku tlačítka „OK“ se šipka kurzoru přesune na kanál
2. Když tlačítko „OK“ stiskněte a podržíte, zobrazí se
výchozí parametr.
Tlačítkem „UP“, nebo „DOWN“ vyberte základní trimování
kanálu 2.
Opakujte postup, dokud nenastavíte požadované
trimování na všech 10 kanálech.
Pro uložení nastavení stiskněte a chvilku podržte tlačítko
„CANCEL“. Poté se znovu zobrazí menu nastavení funkcí.
Stiskněte opakovaně tlačítko „CANCEL“, abyste se dostali
zpět k normálnímu provoznímu zobrazení.
Řešení problémů
Vysílač nereaguje.
Dálkový ovladač ukazuje
hned po zapnutí nebo po
chvilce provozu podpětí.
Dálkový ovladač ukazuje
hned po zapnutí chybu
v poloze přepínače.
Držák kamery (gimbal) není
po aktivaci vodorovně
zarovnaný.
Motory nestartují, i když je
letový akumulátor plně nabitý.
Nefunguje funkce „Following“.
Zkontrolujte stav baterií ve vysílači.
Zkontrolujte polaritu baterií ve vysílači.
Zkontrolujte, jestli je přepínač ON/OFF zapnutý.
Vyměňte baterie za nové.
Používejte vysoce kvalitní alkalické baterie.
Po zapnutí dejte přepínače do přední/horní polohy.
Otočte ovladač „VRB“ do střední polohy.
Zkontrolujte připojení konektorů na držáku kamery.
Došlo k mechanickému zablokování ovládacích pák a nelze
je přesunout do koncové polohy při startu motoru
(vlevo, resp. vpravo dolů).
Je nesprávně (příliš daleko) nastavena poloha trimování.
Zkontrolujte napájení kvadrokoptéry a dálkového ovladače.
Kvadrokoptéra nemá příjem GPS signálu aspoň ze 7 (nebo více)
satelitů.
Vysílač dálkového ovladače nemá příjem GPS signálu aspoň
ze 7 (nebo více) satelitů.
Obrázek 44
Page 15

K vysílači dálkového ovladače není správně připojen GPS přijímač.
Vysílač dálkového ovladače potřebuje po zapnutí alespoň 5 – 8
minut, aby přijal signály ze všech satelitů.
Stiskněte tlačítko „BIND/AUTO FOLLOW“, aby se aktivovala funkce
„Following“.
Kvadrokoptéra ukazuje
podpětí.
Kvadrokoptéra se nezvedá
nebo nestoupá správně.
Kvadrokoptéru nelze
přepnout do režimu „IOC“.
Zkontrolujte stav napětí letového akumulátoru. Napětí musí být
vyšší než 12 V.
Kvadrokoptéra je v bezletovém pásmu.
Jsou špatně nainstalované vrtule, nebo jsou prohozeny.
Používáte nesprávné vrtule.
V menu dálkového ovladače „Display“ zkontrolujte funkce přepínačů
„IOC“ a „GPS“.
Kvadrokoptéra není v režimu „GPS“.
Kvadrokoptéra nemá příjem GPS signálu aspoň ze 7 (nebo více)
satelitů.
Kvadrokoptéra není v režimu „GPS“.
Nefunguje funkce pro návrat
domů.
V menu dálkového ovladače „Display“ zkontrolujte funkce přepínačů
„Go-Home“ a „GPS“.
Kvadrokoptéra nemá příjem GPS signálu aspoň ze 7 (nebo více)
satelitů.
Bezpečnostní předpisy, údržba a čištění
Z bezpečnostních důvodů a z důvodů registrace (CE) neprovádějte žádné zásahy do kvadrokoptéry.
Případné opravy svěřte odbornému servisu. Nevystavujte tento výrobek přílišné vlhkosti, nenamáčejte
jej do vody, nevystavujte jej vibracím, otřesům a přímému slunečnímu záření. Tento výrobek a jeho
příslušenství nejsou žádné dětské hračky a nepatří do rukou malých dětí! Nenechávejte volně ležet
obalový materiál. Fólie z umělých hmot představují nebezpečí pro děti, neboť by je mohly spolknout.
Pokud si nebudete vědět rady, jak tento výrobek používat a v návodu
nenajdete potřebné informace, spojte se s naší technickou poradnou
nebo požádejte o radu kvalifikovaného odborníka.
K čištění používejte pouze měkký, mírně vodou navlhčený hadřík. Nepoužívejte žádné prostředky
na drhnutí nebo chemická rozpouštědla (ředidla barev a laků), neboť by tyto prostředky mohly
poškodit povrch a součásti modelu.
Manipulace s bateriemi a akumulátory
Nenechávejte baterie (akumulátory) volně ležet. Hrozí nebezpečí,
že by je mohly spolknout děti nebo domácí zvířata! V případě spolknutí baterií
vyhledejte okamžitě lékaře! Baterie (akumulátory) nepatří do rukou malých
dětí! Vyteklé nebo jinak poškozené baterie mohou způsobit poleptání pokožky.
V takovémto případě použijte vhodné ochranné rukavice!
Dejte pozor nato, že baterie nesmějí být zkratovány, odhazovány
do ohně nebo nabíjeny! V takovýchto případech hrozí nebezpečí exploze!
Nabíjet můžete pouze akumulátory.
Vybité baterie (již nepoužitelné akumulátory) jsou zvláštním odpadem
a nepatří do domovního odpadu a musí být s nimi zacházeno tak,
aby nedocházelo k poškození životního prostředí!
K těmto účelům (k jejich likvidaci) slouží speciální sběrné nádoby
v prodejnách s elektrospotřebiči nebo ve sběrných surovinách!
Šetřete životní prostředí!
Recyklace
Technické údaje
Elektronické a elektrické produkty nesmějí být vhazovány do domovních odpadů.
Likviduje odpad na konci doby životnosti výrobku přiměřeně podle platných
zákonných ustanovení.
Šetřete životní prostředí! Přispějte k jeho ochraně!
a) Vysílač
Přenosový kmitočet: 2,4 GHz
Počet kanálů: 10
Digitální kódování: AFHDS2A (Automatic Frequency Hopping Digital System)
Výstup vysílače: 5 dBm
Provozní napětí: 4 baterie typu AA, 6 V DC
Vstup GPS signálu: Zásuvka PS/2
Rozměry (Š x D x V): 174 x 187 x 80 mm
Hmotnost (bez baterií): 425 g (včetně přijímače GPS)
b) Kvadrokoptéra
Zdroj napájení: 3 článkový akupack Li-Pol (nominální napětí 11,1 V
Vzdálenost hřídele rotorů: 425 mm (diagonálně)
Rozměry vrtulí: 254 x 97 mm
Vzletová hmotnost: 1500 g (včetně letového akumulátoru)
Max. točící úhel: 200°
Max. úhel sklonu při letu dopředu: 35°
Max. rychlost stoupání: 6 m/s
Max. rychlost klesání: 2 m/s
Max. letová rychlost: 15 m/s (jen v režimu Smart GPS)
c) Napájecí jednotka
Vstupní napětí: 110 – 240 V AC, 50/60 Hz
Výstupní napětí: 12,6 V
Výstupní proud: 4 A
d) Letový akupack
Nominální napětí: 11,1 V
Kapacita: 6400 mAh/10C
Max. nabíjecí proud: 6 A
Max. vybíjecí proud: 64 A
Trvalý vybíjecí proud: 32 A
Rozměry: 55 x 45 x 145 mm
Hmotnost: 460 g
Záruka
Na kvadrokoptéru Reely Shadow 2.0, RtF poskytujeme záruku 24 měsíců.
Záruka se nevztahuje na škody, které vyplývají z neodborného zacházení, nehody, běžného
opotřebení, nedodržení návodu k obsluze nebo změn na výrobku, provedených třetí osobou.
Překlad tohoto návodu zajistila společnost Conrad Electronic Česká republika, s. r. o.
Všechna práva vyhrazena. Jakékoliv druhy kopií tohoto návodu, jako např. fotokopie, jsou předmětem souhlasu společnosti
Conrad Electronic Česká republika, s. r. o. Návod k použití odpovídá technickému stavu při tisku! Změny vyhrazeny!
© Copyright Conrad Electronic Česká republika, s. r. o. VAL/10/2017
 Loading...
Loading...