

Page 1

Conrad sur INTERNET
www.conrad.fr
N O T I C E
Version 03/10
Quadrocoptère/
helicoptère
Code : 208000
Note de l’éditeur
Cette notice est une publication de la société Conrad, 59800 Lille/France.
Tous droits réservés, y compris la traduction. Toute reproduction, quel que
soit le type (p.ex. photocopies, microfilms ou saisie dans des traitements
de texte électronique) est soumise à une autorisation préalable écrite de
l’éditeur.
Reproduction, même partielle, interdite.
Cette notice est conforme à l’état du produit au moment de l’impression.
Données techniques et conditionnement soumis à modifications
sans avis préalable.
© Copyright 2001 par Conrad. Imprimé en CEE. XXX/03-10/JV
Cette notice fait partie du produit. Elle contient des informations importantes
concernant son utilisation. Tenez-en compte, même si vous transmettez le
produit à un tiers.
Conservez cette notice pour tout report ultérieur !
Page 2

2 43
Page 3

N’oubliez pas non plus les consignes concernant le vent et la pression atmosphérique,
du vent calme est recommandé pour le premier vol.
Vérifiez encore une fois toutes les pièces et posez l’hélicoptère prêt à voler sur le sol à
une distance de quelques mètres de votre poste de commande.
Le réglage de base ‘’débutant’’ des paramètres de vol du chapitre ‘’configuration’’
est recommandé à tous les débutants de vol d’un quadrocoptère. Ceci correspond aussi au réglage d’usine du quadrocoptère.
Avant d’effectuer le premier vol, il y a une consigne concernant le comportement de vol
différent lors d’un vol à proximité du sol et d’un vol libre dans l’air. Lors d’un vol à ras
du sol et lors du démarrage, il en résulte des tourbillonnements et des courants d’air
qui influent sur le comportement de vol du quadrocoptère. Il en résulte par conséquent
une réaction plus rapide aux mouvements de commande ainsi qu’un léger dérapage du
quadrocoptère vers l’avant, vers l’arrière ou sur le côté.
Introduction
Nous vous remercions pour l’achat de ce produit de qualité ! Nous vous souhaitons de
nombreuses minutes de vol passionnantes et fascinantes avec ce modèle d’avion léger.
Cependant, nous voudrions attirer votre attention que le fait que pour un fonctionnement
fiable de ce modèle volant une étude précise de manuel vous est recommandé.
Dans ce manuel d’emploi, vous trouverez des informations utiles et des consignes
de sécurité concernant la première mise en service, la configuration, l’entretien et la
maintenance du produit.
Dans le chapitre ‘’petite école de vol’’, nous avons essayé de faire mieux comprendre de
façon simple et didactique la commande d’un hélicoptère à 4 rotors. Nous recommandons
particulièrement aux débutants d’étudier attentivement ce chapitre.
Attention, consigne importante !
Lors du fonctionnement du modèle d’avion, il peut s’ensuivre des
dommages matériels et immatériels. Faites absolument attention à ce
que vous soyez suffisamment assuré pour le fonctionnement du modèle,
par exemple que vous disposez d’une assurance de responsabilité civile,
vous êtes ainsi informé avant la première mise en service du modèle par
votre assurance si le fonctionnement du modèle est assuré/sécurisé.
Attention : dans les différents pays de l’Union Européenne, il existe une
assurance civile pour tous les modèles d’avion !
C’est parti !
Allumez la radiocommande, positionnez le levier d’accélération sur zéro puis branchez
ensuite l’accu. L’hélicoptère acquitte un court test automatique par un éclairage continu
de la LED verte. En cas de défaut/dysfonctionnement, les LEDs clignotent. Dans le cas
où il se produit une erreur, l’accu doit être débranché et après suppression de l’erreur
(par exemple la pédale d’accélération n’est pas positionné sur zéro), il convient de
rebrancher l’accu. Dans le cas de dysfonctionnement, les moteurs ne peuvent pas être
lancés pour des raisons de sécurité. Revenez à votre poste de commande, puis faites
attention aux éventuels spectateurs.
42 3
Page 4

Explication des symboles
Roll (Roulis)
Le symbole avec l’éclair dans le triangle vous prévient de la présence d’une
tension dangereuse non isolée. Cette tension peut suffire à provoquer un
choc électrique sur les personnes.
Le signe d’exclamation dans le triangle indique qu’il faut respecter les
consignes d’utilisation et d’entretien qui sont mentionnées dans cette notice.
Le symbole de ‘’pouce ‘’ indique des conseils spéciaux, des consignes
d’utilisation ou des informations complémentaires.
On nomme/désigne roulis (en allemand le basculement sur le côté), le mouvement du
quadrocoptère autour de l’axe longitudinal/de roulis, comparable avec le roulement
sur le côté d’une boule (ou le déplacement latéral d’un crabe). Par conséquent, le
quadrocoptère se déplace sur le côté indépendamment de sa direction vers l’avant.
Roulis vers la droite → Le quadrocoptère se déplace (roule) vers la droite
Roulis vers la gauche
Planer
Chaque état/chaque position de vol est désigné comme vol plané pendant lequel la
quadrocoptère ne s’élève ni ne chute, ainsi la force ascensionnelle dirigée vers le haut
est identique au poids dirigé vers le bas. Ceci est atteint en peu de temps en position
moyenne d’accélération (dépendant de la force utile éventuellement présente).
3. Premiers essais de vol
Pour le premier vol, il convient de s’adresser à un pilote d’hélicoptère expérimenté qui
peut aider aussi pour l’équilibrage/la compensation du modèle. Normalement, aucun
autre réglage n’est nécessaire, mais le comportement de vol/l’attitude de vol de la
radiocommande utilisée peut être influencé.
→ Le quadrocoptère se déplace (roule) vers la gauche
On peut aussi s’adresser aussi un club de modélisme qui pourrait donner d’autres
informations pour le fonctionnement des modèles d’avion. En général, il existe aussi de
l’aide pour tout type de problème.
À présent, étant donné que les notions concernant la commande du quadrocoptère sont
connues, vous pouvez commencer par un premier vol. Veuillez vérifier auparavant le
quadrocoptère conformément aux consignes du chapitre ‘’première mise en service’’ et
assurez-vous que ayez suffisamment de place pour vous exercer. Le mieux pour cela
serait une prairie tondue ou un sol identique en plein air. Faites attention aussi que les
assurances n’incluent pas les dommages éventuellement occasionnés par les modèles
d’avion. Dans ce cas, une assurance pour vol spécial est recommandée.
4 41
Page 5

Axe de lacet (Gier)
Domaine d’application
On nomme/désigne lacet (en allemand tourner sur son propre axe), comme la traduction
allemande le fait supposer, la rotation du quadrocoptère autour de l’axe vertical/de
giration (axe vertical/incliné). Ce mouvement intervient soit de façon intempestive/
involontaire en raison du couple de rotation ou de façon volontaire en tant que
modification du sens de vol. Chez ce quadrocoptère, ce mouvement n’est pas contrôlé
avec un rotor arrière/de queue mais par une modification de la vitesse des rotors par
rapport aux autres.
Lacet droit → synonyme avec une rotation du quadrocoptère vers la droite dans
le sens horaire
Lacet gauche → synonyme avec une rotation du quadrocoptère vers la gauche dans
le sens anti-horaire
Tangage (Nick)
On nomme/désigne tangage (en allemand le basculement vers l’avant ou vers l’arrière),
le mouvement du quadrocoptère autour de l’axe de tangage/transversal, comparable
avec le mouvement de tangage d’une tête. Par conséquent, le quadrocoptère gagne en
vitesse de vol ou freine.
L’hélicoptère radiocommandé QC450-I est exclusivement réservé pour l’usage privé dans
le domaine du modélisme et pour les durées de fonctionnement qui y sont liées.
Ce système n’est pas conçu pour une autre utilisation. Une utilisation différente de
celle-ci peut entraîner une détérioration du produit avec ses dangers qui y sont liés,
comme par exemple court-circuit, incendie, choc électrique, etc. Veuillez respecter
impérativement les consignes de sécurité !
Ce produit ne doit être ni humide, ni mouillé. Etant donné qu’il y a présence d’un circuit
électronique de commande sensible dans l’hélicoptère, qui réagit aussi aux fluctuations
de température et qui est optimisé pour une gamme de températures déterminé, un
fonctionnement à moins de 10°C est à éviter.
Ce produit n’est pas un jouet, il n’est pas conçu pour des enfants âgés de moins de
14 ans.
Respectez toutes les consignes de sécurité de cette notice. Elle contient
d’importantes informations concernant la manipulation de ce produit.
Tangage vers l’avant → Le quadrocoptère bascule vers l’avant et accélère
Tangage vers l’arrière
→ Le quadrocoptère bascule vers l’arrière et freine
40 5
Page 6

Description du produit
Chez ce modèle d’hélicoptère électrique, il s’agit d’un hélicoptère entièrement prémonté
équipé de 4 rotors. Dans le domaine professionnel, de tels ‘’vrombissements’’ sont
utilisés pour les applications les plus diverses. Le circuit électronique le plus moderne
commandé par microprocesseur avec réglage de la position et capteurs d’accélération
stabilisent le quadrocoptère/l’hélicoptère.
Des moteurs à courant continu sans balai de haute qualité en lien avec une commande
spécialement conçue permettent un fonctionnement de vol long et puissant et vous
procure une petite source de réserve pour des charges.
En principe, l’électronique/le circuit électronique contrôle toutes les modifications de
positions non désirées de l’hélicoptère et fait réagir celui-ci au moyen des interventions
des réglages ciblées. Ainsi, il ne reste plus qu’au pilote du modèle de prendre les
commandes à proprement dites du modèle et le vol du quadrocoptère s’avère être
beaucoup plus facile que celui d’un hélicoptère standard.
Qu’est-ce qui unit cet hélicoptère avec un hélicoptère standard ?
Même chez un quadrocoptère à réglage électronique, les conditions de fonctionnement
sont les mêmes que chez un hélicoptère classique. La performance de vol et le
comportement/l’attitude de vol dépendent de la pression atmosphérique, du vent et
leur modification. Dans le cas d’une faible pression atmosphérique et d’air chaud (par
exemple en été) , l’air offre au rotor peu de résistance et il en résulte ainsi une poussée
aérostatique/une sustentation plus faible que lors d’une pression atmosphérique élevée
ou lors de la présence d’air froid (par exemple en hiver). En raison de poids plus faibles
et de facteurs dimensionnels à la différence d’un vol réel d’hélicoptère, ceci est à
peine sensible bien que présent. Dans le cas de compétition, le savoir peut avoir des
répercutions sur ces conditions environnementales.
En plus de la pression atmosphérique, un vent est un élément environnemental décisif.
Comme lorsqu’on enlève à une personne le sol sous ses pieds, un hélicoptère et un
quadrocoptère réagissent aussi au vent, du fait premièrement que l’air est pressé contre
le quadrocoptère et pousse pour ainsi dire celui-ci, et deuxièmement que de petites
zones à pression atmosphérique différente se forment dû au vent, celles-ci pouvant
influencer la propulsion.
Le réglage électronique peut certes intercepter de petites modifications
importunes, mais ne pas les rendre complètement inefficaces. Étant donné
que le poids d’un quadrocoptère est inférieur à un kilogramme, celui-ci réagit
sensiblement au vent. Il suffit de le comparer avec un objet léger, comme par
exemple un emballage cartonné qui est envolé par le vent. Les conditions
idéales de vol sont par conséquent un vent complètement calme jusqu’à un
vent léger et uniforme.
2. Notions spéciales concernant ce modèle d’hélicoptère
Pour expliquer plus facilement la commande, il convient d’utiliser aussi les notions
classiques. Celles-ci sont issues du langage du pilote d’avion et sont très répandues.
Il convient de comprendre les désignations de direction en partant de la perspective d’un
pilote ‘’virtuel’’.
6 39
Page 7

Petite école de vol
Livraison
1. Principes de vol du modèle
Même dans une structure d’hélicoptère et d’avion véritable, le comportement de vol/
l’attitude de vol et la possibilité de vol sont basés sur les lois de l’aérodynamisme. Chez
un avion/sur un avion, les ailes produisent la poussée aérostatique/la sustentation
nécessaire et l’hélice la poussée en avant/la propulsion. En fonction/selon une
modification de la montée (position inclinée) à une vitesse constante des pales, la
poussée aérostatique est forte ou faible (se réduit).
Grâce au mouvement de rotation du rotor, un des sens de rotation contraire à la
force établie agit sur le corps/le fuselage de l’hélicoptère. Cette force ferait tourner un
hélicoptère autour de l’axe incliné et un vol contrôlé ne serait pas possible. C’est pourquoi
il convient d’utiliser un rotor de queue (arrière) qui agit dans le sens contraire de cette
force et fait stabiliser ainsi l’hélicoptère autour de l’axe incliné. Le rotor arrière/de queue
est monté à 90° contrairement au rotor principal et produit une propulsion précisément
dans le mouvement rotatif/la trajectoire autour duquel le fuselage/l’hélicoptère tournerait.
Qu’est-ce qui distingue cet hélicoptère d’un hélicoptère standard ?
En principe, on peut dire qu’un quadrocoptère n’a pas comme un hélicoptère que deux,
mais quatre rotors. Ceux-ci sont également ordonnés sur un niveau contrairement aux
hélicoptères standards. Comme nous l’avons déjà mentionné, un hélicoptère a des pales
du rotor réglables, la disposition et la commande/l’excitation du rotor est ainsi une affaire/
un cas très complexe et d’une exigence mécanique. Pour pouvoir modifier également la
propulsion chez ce quadrocoptère, la vitesse de rotation des rotors (les hélices) doit être
modifié chez un quadrocoptère. Il en résulte une propulsion modifiée et le quadrocoptère/
cet hélicoptère monte ou chute.
Pourquoi un quadrocoptère ne tourne-t-il pas autour de l’axe incliné/vertical ?
Prémonté partiellement
N° de positionnement Désignation QC450-I (pièces)
1 Hélicoptère 450-I ARF 1
2 Tête du rotor 4
3 Rondelle élastique M3 6
4 Hélice tournant à gauche 2
5 Hélice tournant à droite 2
6 Indicateur de la direction de vol 1
7 Ruban adhésif avec côté/face collant(e) 1
8 Connecteur pour accu 1
9 Tube d’antenne d3 x 300 1
10 Elastique de rechange pour cache 2
11 Jumper 4
12 Notice 1
Comme nous l’avons déjà mentionné, un hélicoptère ne dispose que d’un rotor principal
qui génère le couple de rotation. Chez ce quadrocoptère, quatre rotors sont mis
en mouvement, parmi lesquels deux ont un sens de rotation contraire. Grâce à la
disposition/l’implantation symétrique et au sens de rotation contraire, le couple de
rotation des rotors s’annule et ce quadrocoptère reste stable dans l’axe vertical/incliné.
Mais comme la propulsion ainsi que l’inclinaison sont réglées avec des modifications
de la vitesse de rotation des rotors, tous les rotors ne fonctionnent jamais avec la
même vitesse de rotation. IL en résulte à nouveau un couple de rotation qui fera tourner
l’hélicoptère autour de l’axe incliné/vertical. Ce mouvement de rotation est déterminé
par un circuit électronique et relié/lié par une variation de vitesse de rotation sélective/
adéquate. On peut reconnaître/détecter uniquement qu’un quadrocoptère révèle un
comportement de vol compliqué qui est peut simple d’utilisation au moyen d’un circuit
électronique de commande et de réglage moderne.
38 7
Page 8

Vue du schéma détaillé
Liste de contrôle pour le démarrage (copie)
c Les conditions météorologiques pour un démarrage OK, les Jumper
présents pour une éventuelle configuration
c Cadre sans détérioration et toutes les connexions à vis sont serrées
c Toutes les connexions/raccords pliables dépliés et bloquées
c Les rotors sont montés correctement, fixement/solidement et sans
détérioration
c L’accu complètement chargé et fixé avec un ruban adhésif
c Le câble d’antenne et d’accu ne doit pas se trouver dans le champ de
rotation des rotors
c Vérifiez la fréquence piézoélectrique (aucune utilisation de cette même
fréquence pour 2 modèles d’avion)
c L’antenne de l’émetteur est complètement dépliée
c Les piles de l’émetteur sont bien rangées dans le compartiment,
l’émetteur est allumé
1. Châssis central bas 11. Vis M3x5
2. Châssis central haut 12. Vis 2,6 x 10
3. Articulation de l’avant-bras 13. Cache du bas
4. Avant-bras/bras en aluminium 14. Cache du haut
5. Support moteur 15. Petit tube d’antenne
6. Pied/jambe d’atterrissage 16. Ruban adhésif de deux côtés
7. Moteur BL 450 17. Câble d’alimentation principal avec fiche
8. Rotor course vers la droite 18. Driver Unit QC01
9. Rondelle élastique 19. ControlUnit QC02
10. Tête de rotor 20. Indicateur de la direction de vol
8 37
c Installation horizontale/positionnement horizontal sur un emplacement
de démarrage fiable (espace/intervalle suffisant par rapport aux objets et
personnes)
c Câble d’accu branché
c Installation de l’émetteur/émetteur reconnu et configuration à la première
mise en service
c Test automatique de l’hélicoptère OK, la LED rouge est éteinte, la LED
verte est allumée.
Prêt à décoller → lancer les moteurs
Page 9
Caractéristiques techniques
Dimensions
- Diamètre sans les rotors : 450 mm
- Hauteur totale dépliée/escamotable : 165 mm
Poids
- 690 g env. avec accu
- Poids au décollage maxi 1000 g (ne peut pas être dépassé !)
Valeurs électriques
- Tension d’alimentation : 9 – 12 V (accu LiPo à 3 éléments)
Valeurs de puissance :
- Consommation par moteur : 3 – 9A env.
- Courant max. par moteur 14 A env.
- Poussée/propulsion par moteur 700 g max.
Conditions environnantes
- Usage intérieur et extérieur (sec, pas de pluie)
- Pas de vent à l’exception d’un vent léger
- Température de 10°C à 40°C
- Humidité relative moyenne européenne
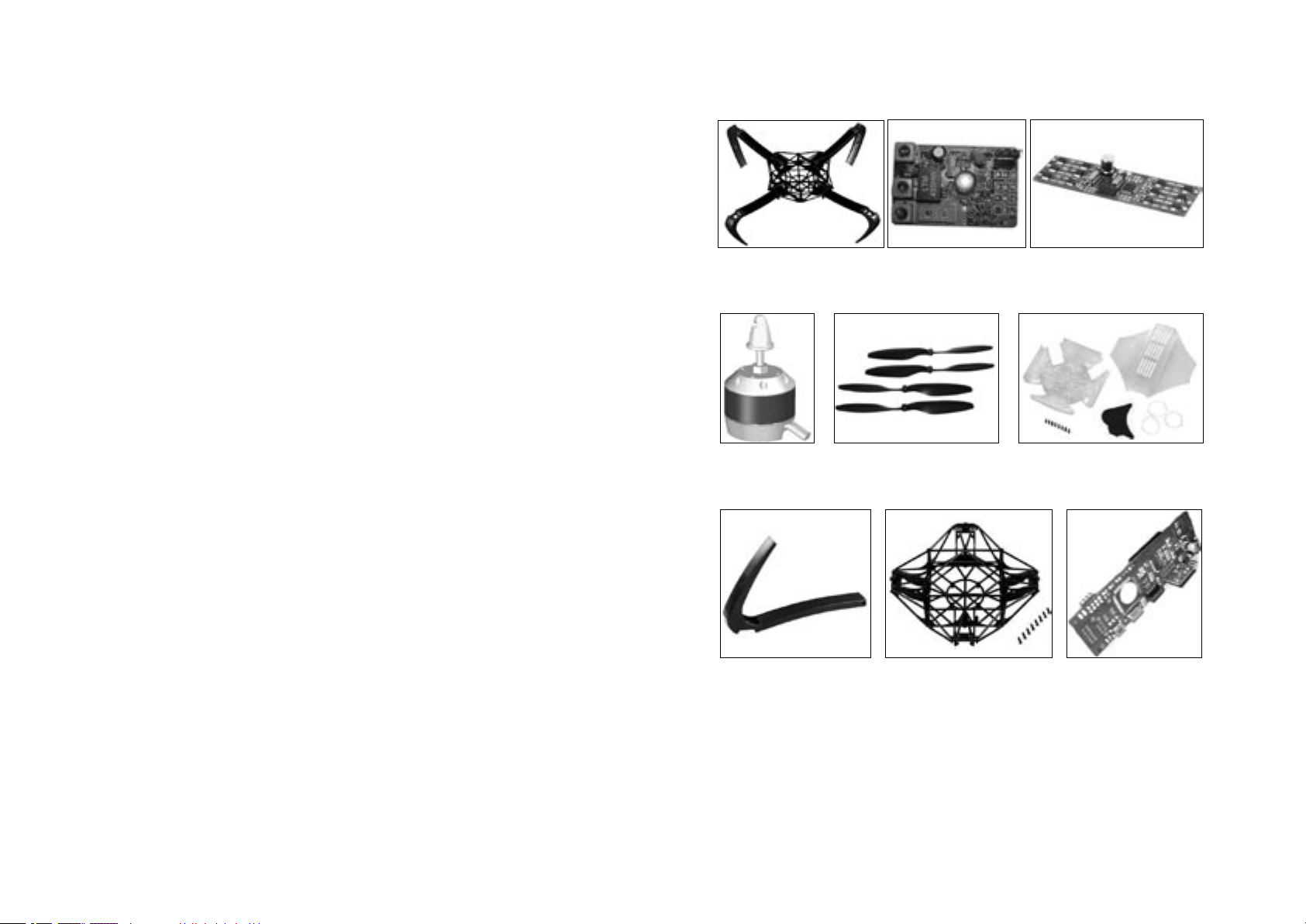
Pièces de rechange
Châssis complet Unité récepteur Platine Driverboard
code 206906 code 206905 code 206903
Moteur sans balai Rotors (2 gauches, 2 droites) Cache & indicateur de direction
code 206904 code 206901 code 206899
Platine de l’unité de
Avant-bras en aluminium Châssis central commande et de capteurs
code 206898 code 206897 code 206902
36 9
Page 10

Recyclage
a) Généralités
Si cette commande à distance ne fonctionne plus, elle doit alors être
recyclée selon les normes en vigueur.
b) Piles et accus usagés
En tant qu’utilisateur, vous êtes légalement (ordonnance sur les
piles) tenus de ramener toutes les piles et tous les accus usagés. Il
est formellement interdit de jeter les piles usagées dans les ordures
ménagères !
Les piles / accus qui contiennent des substances nocives portent
des symboles qui précisent l’interdiction de les jeter dans les ordures
ménagères.
Les symboles pour le métal lourd sont Cd = cadmium, Hg = mercure,
Pb = plomb et sont représentés sous le symbole de la poubelle.
Vous pouvez déposer vos piles et accus usagés gratuitement dans
les sites de collecte de votre ville, dans nos magasins et dans tous les
points de vente de piles et accus.
Vous vous conformerez ainsi aux dispositions légales et participerez à
la protection de l’environnement.
10 35
Page 11
Indications des LED
Fonction ou
problème
ROUGE VERT
Connexion sans
fil dérangée/
perturbée
Configuration
Mode Detect
Compensation
Offset RC
Prêt à voler
Compensation/
réglage de la
position neutre
Connexion
sans fil/radio
perturbée
Moteurs
en mode
d’accélération
standard (au sol)
Fonction
d’atterrissage
forcé/d’urgence
est activée
LowBat (sous-
tension de l’accu
constatée)
Clignotement Clignotement
Indique
le progrès/
l’évolution
Clignotement Clignotement
(ÉTEINT)
(ÉTEINT)
Clignotement Clignotement
Clignotement Clignotement
Clignotement ON
LED
Indique
le numéro
de canal
OFF
OFF
ON Clignotement
ON
Clignotement
Commentaires Moteurs
Les LED clignotent
de façon alternative
et lentement
Impulsion lumineuse
avec pause
Les LEDs s’allument par
alternance et rapidement
La LED verte clignote
rapidement
Les LEDs clignotent
alternativement et
lentement
La LED verte
clignote lentement,
le clignotement vert
passe dans le cas d’une
accélération de plus
de 2 secondes à un
éclairage continu.
Les LEDs clignotent
simultanément
et lentement
La LED rouge clignote
rapidement et la LED
verte s’allume en continu
OFF
(ÉTEINT)
OFF
(ÉTEINT)
OFF
(ÉTEINT)
OFF
(ÉTEINT)
OFF
(ÉTEINT)
ON
ON
ON
ON
Consignes de sécurité
Très cher client, très chère cliente,
Ces consignes de sécurité ne servent pas seulement à la protection du produit,
mais aussi à votre propre sécurité et à d’autres personnes. C’est pourquoi il
convient de lire attentivement ce chapitre avant de mettre en service ce produit !
1. Généralités
· Pour des raisons de sécurité et d’homologation (CE), il est interdit de modifier et/ou de
démonter le produit.
· Cet appareil n’est pas un jouet. Tenir hors de portée des enfants de moins de 14 ans.
· Cet appareil ne doit être ni mouillé, ni humide. Etant donné qu’il y a un circuit
électronique de commande sensible dans le quadrocoptère, qui réagit aussi aux
variations de température et qui est optimisé pour une certaine gamme de température,
un fonctionnement à moins de 10°C est à éviter.
· Si vous ne disposez d’aucune connaissance suffisante au sujet des hélicoptères radiocommandés, il convient de vous adresser à un sportif expérimenté ou à un club de
modélisme.
· Le contrat d’une assurance privée est recommandable. Dans le cas où vous en
possédez une telle, renseignez-vous si le fonctionnement d’un modèle radiopiloté soit
pris en compte par l’assurance.
· Ne laissez pas l’emballage traîner, ceci pourrait devenir un jouet dangereux pour les
enfants.
· Ce produit a été conçu pour un fonctionnement à une température ambiante entre 10°C
et 40°C et à un taux d’humidité normal par temps sec. Dans le cas d’un fonctionnement/
d’une utilisation en dehors de ces conditions, ceci peut conduire à des propriétés
modifiées et à une détérioration de l’appareil.
· Un poids au décollage maximal de 1000 g ne doit pas être dépassé. Dans le cas d’un
poids élevé au décollage, les rotors peuvent être endommagés et occasionner une chute.
2. Avant chaque mise en service
· Avant de mettre votre émetteur en service, assurez-vous qu’aucun autre modéliste
n’utilise le même canal à proximité. Etant donné que les deux émetteurs se croisent sur
le même canal, un contrôle du modèle n’est plus possible.
34 11
Page 12

· Vérifiez la sécurité de fonctionnement de votre modèle et de votre radiocommande.
Faites attention aux détériorations visibles, comme par exemple les connexions
défectueuses, les vis desserrées ou les câbles endommagés. Des rotors endommagés
peuvent occasionner des conséquences dangereuses. Ne mélangez pas les anciens
et les nouveaux rotors. L’ensemble des pièces mobiles du modèle doivent fonctionner
librement/de façon souple, mais ne devraient pas montrer du jeu.
· Assurez-vous avant chaque vol à ce que les rotors soient vissés fixement sur les
moteurs et que les rotors tournent plus librement/sans problème. Un vissage trop serré
peut entraîner des détériorations du moteur ou du rotor.
Remplacement du cadre complet
Si, après une chute, il y a plus qu’une cassure mais que le circuit électronique est en état
de marche, vous pouvez aussi remplacer le cadre complet.
Retirez le cache supérieur et inférieur et la partie supérieure du cadre à grille, puis
le moteur comme il est décrit sous le point ‘’remplacement d’un moteur’’ puis insérez/
fixez les moteurs dans les nouveaux avant-bras. Retirez le circuit électronique restant
(ControlUnit QC02 et 2x DriverUnit QC01) puis insérez-le dans le nouveau cadre à grille.
Montez ensuite les nouveaux avant-bras dans les nouveaux cadre à grille/quadrillé.
· L’accu installé dans le modèle est à recharger complètement conformément aux indications du fournisseur/fabricant.
3. Pendant le fonctionnement
Ne prenez aucun risque pendant le fonctionnement de l’appareil ! Votre propre sécurité et
celle de votre environnement dépendent uniquement de la manipulation consciencieuse
du modèle.
· Une manipulation non-conforme peut occasionner de sérieux dommages matériels et
immatériels ! Ayez toujours un œil sur le modèle et ne le l’utilisez pas la nuit.
· Ne faites jamais fonctionner ce modèle réduit à proximité de personnes, animaux ou
objets.
· Réglez le fonctionnement de votre modèle dans le cas d’une perturbation et supprimez
la cause du dysfonctionnement avant de mettre à nouveau en service votre modèle.
· Ne faites pas fonctionner votre radiocommande pendant un orage, sous des lignes à
haute tension ou à proximité de mâts d’antenne.
· Laissez toujours votre radiocommande (émetteur) allumée tant que le modèle
fonctionne. Pour arrêter le modèle, coupez d’abord le moteur, puis débranchez le
récepteur. Ensuite, il convient de débrancher l’émetteur.
· Protégez la radiocommande de l’humidité et de la saleté.
· N’exposez pas votre appareil à un ensoleillement prolongé ou à de grosse chaleur.
· Dans le cas d’une forte chute, les capteurs gyro électroniques peuvent être endommagés et déréglés. Avant un nouveau vol, il est impératif de vérifier le fonctionnement.
Faites attention à insérer le circuit électronique
comme indiqué ci-dessous !
Image 22 : Installation/insertion du circuit électronique
12 33
Page 13

d) Desserrez les vis du support moteur puis retirez le moteur du support. Tirez le câble
à l’aide de l’avant-bras.
Image 20 : Remplacement
e) Installez le nouveau moteur et passez le câble de connexion à l’aide de l’avant-bras.
Vissez le moteur puis soudez les câbles conformément au tableau de couleur sous le
point c).
Dans le cas où les couleurs du câble de connexion sont confondues/
mélangées, le sens de rotation du moteur se modifie/change. Ceci
entraîne un dysfonctionnement du modèle ! Comparez par mesure de
sécurité l’affectation des autres moteurs avec celle du moteur remplacé.
f) Insérez le DriverUnit QC01 à nouveau dans son support, vérifiez l’assise correcte
du câble plat en tant que connexion à l’unité de contrôle QC02 puis montez la partie
supérieure du cadre quadrillé.
Si vous voulez remplacer plusieurs moteurs, il convient d’effectuer les étapes suivantes
pour chaque moteur.
Remplacement d’un avant-bras
Dans le cas d’une détérioration d’un avant-bras, ce dernier peut être remplacé. Effectuez
les étapes comme elles figurent sous le chapitre ‘’remplacement d’un moteur’’. Si vous
avez retiré le moteur de l’avant-bras endommagé, il convient de fixer simplement le
moteur au nouvel avant-bras et d’effectuer les étapes comme indiquées.
Pour remplacer l’avant-bras, il convient de retirer la partie supérieure du cadre à grille/
quadrillé. Lorsque vous retirez l’avant-bras, il convient de tourner celui-ci légèrement et
de le retirer du cadre à grille/quadrillé.
du moteur
· Dans le cas d’une chute, l’appareil est tout de suite réduit à zéro. Les rotors en rotation/
en mouvement peuvent être endommagés en contact avec des obstacles. Avant
d’entreprendre un nouveau vol, il convient de vérifier s’il n’y a pas d’éventuelles fissures
ou cassures !
· Pour éviter tout dommage ou toute détérioration de l’hélicoptère dû à une chute
en raison d’une sous-tension ou de l’accu par une décharge profonde, nous vous
recommandons de respecter impérativement le signaux lumineux signalant la soustension. Etant donné que les LEDs incorporées n’éclairent que dans une direction, nous
vous recommandons l’installation/le montage supplémentaire du saver LiPo code
230327. Le saver LiPo vous indique par le signal lumineux une sous-tension menaçante.
Placez le saver LiPo au bon emplacement dans l’hélicoptère.
· En raison d’une surchauffe naturelle des moteurs et des composants électroniques,
nous vous recommandons de ne pas dépasser un temps/une durée de vol de 20 min.
max. Ensuite, nous vous recommandons de laisser refroidir suffisamment l’appareil afin
d’éviter tout dommage dû à la surchauffe.
4. Après toute utilisation
· Nettoyez le quadrocoptère/l’hélicoptère de toute saleté (herbe, etc) et vérifiez que les
rotors soient bien installés et qu’ils n’ont pas de détériorations dues aux chutes.
· Retirez toujours l’accu du circuit électronique en débranchant la fiche. Des courants
passant peuvent sinon décharger complètement l’accu et ainsi le détruire.
Image 21 : Remplacement de
l’avant-bras
32 13
Page 14

Consignes d’utilisation des piles et des accus
· Les piles et les accus ne sont pas des jouets et ne doivent pas être laissés aux enfants.
Gardez toujours les accus et les chargeurs hors de portée des enfants. Une utilisation
non conforme peut présenter des risques.
Faites impérativement attention au sens de rotation du moteur spécifique
et à la sélection du rotor correspondant. Si vous n’avez pas choisi le bon
rotor, le modèle n’est pas apte à voler et on en vient à des dysfonctionnements lors du démarrage du modèle !
· Ne laissez pas traîner les piles/accus, il y a risque que les enfants ou animaux domestiques puissent les avaler.
· Ne court-circuitez jamais les piles/accus, n’utilisez jamais les accus à proximité d’un
feu, d’appareils de chauffage ou d’autres sources de chaleur. Cela pourrait provoquer
une surchauffe, une explosion ou un incendie.
· Évitez tout contact entre l’électrolyte et les yeux ou la peau. Si un tel cas venait à se
produire, rincez immédiatement à l’eau du robinet et consultez si besoin un médecin.
Un traitement tardif ainsi qu’un contact ultérieur avec l’électrolyte peut avoir des
conséquences néfastes.
· Les anciennes piles ne doivent pas être rechargées. Risque d’explosion et d’incendie !
Ne chargez que les accus prévus pour cela ; utilisez les chargeurs d’accus appropriés.
· Lors d’un usage trop prolongé (par exemple le stockage), il convient de retirer les
piles (et/ou accus) installées dans la télécommande et le modèle d’avion pour éviter
d’endommager les piles/accus (qui coulent).
· Rechargez les accus tous les 3 mois, étant donné que ceci peut entraîner une
décharge profonde en raison d’une autodécharge.
· Remplacez toujours tous les accus et/ou piles. Ne mélangez pas les piles/accus à
moitié chargés. Utilisez toujours des piles et/ou accus de même type et fournisseur.
· Ne mélangez jamais les piles avec des accus ! Utilisez soit des piles ou des accus pour
alimenter l’émetteur de la télécommande.
· Le fonctionnement de la télécommande (émetteur) avec des accus à place de piles est
possible.
· Une tension plus faible (piles = 1,5 V, accus = 1,2 V) et une capacité plus faible
entraînent une diminution de la durée de fonctionnement. Ceci n’a pas d’importance
étant donné que la durée de fonctionnement de l’émetteur est largement supérieure à
celle du modèle.
Remplacement d’un moteur
Dans le cas d’un moteur endommagé (surchauffe, erreurs électriques ou endommagement
du lieu de stockage) il est nécessaire de remplacer celui-ci. Effectuez les étapes indiquées :
a) Retirez le rotor du moteur endommagé.
b) Retirez le cache supérieur et la partie supérieure du cadre à grille en desserrant les
vis supérieures. Désormais, vous avez libre accès aux circuits excitateurs du moteur
(DriverUnit QC01). Vous pouvez retirer ceux-ci prudemment de leur support pour
pouvoir encore mieux les manipuler.
Image 18 : Connexions du moteur
c) Notez/repérez les couleurs du câble de connexion au moteur aux points de soudure A,
B et C, puis dessoudez les câbles.
Point de soudure Couleur
A
B
C
· Si vous mettez des piles dans la télécommande, nous vous recommandons l’utilisation
de piles alcalines de bonne qualité.
· Si vous utilisez des accus, ceci peut entraîner une diminution de la portée.
14 31
Image 19 : Points de soudure
Page 15

Entretien et maintenance
Assemblage/finition du modèle
1. Nettoyage régulier
Cet hélicoptère est un appareil de vol très simple mais à la conception très bien étudiée.
Il ne comporte qu’aucune pièce mécanique qui nécessite un graissage ou un entretien
éventuel. Cependant, il convient de nettoyer l’hélicoptère après chaque vol de toute
saleté persistante (brins d’herbe, poussière, etc.).
Débranchez l’accu après chaque utilisation de l’hélicoptère !
Utilisez pour le nettoyage un chiffon sec ou légèrement humidifié et évitez tout contact du
circuit électronique avec l’eau, l’accu et les moteurs.
Ne faites pas voler l’hélicoptère sans cache pour le circuit électronique. Faites attention
à ce qu’il n’y ait pas d’humidité qui y pénètre à l’intérieur (par exemple les brins d’herbe
mouillés, etc.). Evitez de faire voler l’hélicoptère sous la pluie !
2. Entretien de l’accu
- Faites attention à ne pas décharger complètement l’accu.
- Mettez toujours sous tension la connexion entre l’hélicoptère et l’accu après un vol.
- Faites attention à l’affichage d’avertissement de sous-tension de l’hélicoptère
rouge clignote rapidement, la LED verte s’allume.
- Logez/installez l’accu conformément aux indications du fournisseur.
- Ne chargez toujours l’accu avec un chargeur prévu à cet effet.
3. Remplacement des pièces endommagées
Remplacement des rotors
Dans le cas où un rotor est endommagé en raison d’une chute ou d’autre action, il
convient de remplacer celui-ci immédiatement. Cela vaut également si vous constatez
de légères fissures dans le rotor. En raison de la vitesse élevée, des pièces de moteurs
endommagés peuvent se détacher ou conduire à une détérioration ou mise en danger
de l’environnement.
Pour remplacer un rotor, il convient de retirer la tête du rotor avec la rondelle élastique
et le rotor endommagé. Lors de l’installation du nouveau rotor, il convient de procéder
comme il est indiqué sous le chapitre ‘’finition du modèle’’, point 2 : installation des rotors.
Faites attention à sélectionner correctement le rotor en respectant le sens de rotation du
moteur spécifique.
→ la LED
1. Vérification du châssis prémonté
Avant de commencer à équiper le modèle, il convient de vérifier toutes les fixations par
vis ou par boulons, ainsi que les raccords du modèle prémonté (voir photo ci-dessous)
en position assise/fixe.
Image 01 : Châssis
Le modèle est fourni dans un état replié. Pliez/rabattez les avant-bras dans leur position de
vol. Pour cela, il convient d’écarter un peu les brides de fixation contre le châssis central
et de rabattre les avant-bras vers le haut (vous pouvez entendre un léger encliquetage).
Rabattez/repliez ensuite les bras/les montants dans la positon de vol (vous pouvez
entendre un léger encliquetage). Après effectué ces procédures, le modèle doit apparaître
comme ci-dessus. L’indicateur de direction de vol rouge signale ce faisant ‘’l’avant’’.
2. Montage des rotors
Vous pouvez lire le sens de rotation des rotors à partir de l’image ci-contre (vue de haut).
Ce faisant, la position du circuit électronique et de la fixation de l’antenne peut être utilisé
comme point de départ pour l’orientation du modèle. La fixation de l’antenne devrait se
trouver derrière à droite.
Étant donné que les moteurs sont prémontés, il convient de respecter précisément
le sens de rotation !
30 15
Page 16

Pour le montage, fixez le rotor correspondant (avec une inscription RIGHT pour la
rotation vers la droite et
moteur puis fixez celui-ci en vissant la pale du rotor (voir photo représentant la pale
du rotor ci-dessous). Entre le rotor et la pale, il faut placer une rondelle élastique, ceci
permettant d’éviter le dévissage de la pale en vol.
LEFT pour la rotation vers la gauche) sur l’axe adaptateur du
Fonctions de sécurité
1. Protection de moteur
Le circuit électronique de commande dispose d’un dispositif de protection de moteur qui
met hors circuit/arrête tout de suite automatiquement les moteurs par un blocage des
rotors (par exemple après une chute).
2. Atterrissage forcé/d’urgence
Si le circuit de commande électronique de l’hélicoptère constate des perturbations trop
élevées du signal de commande, il essaie d’orienter l’hélicoptère dans une position
horizontale.
Si la perturbation de la réception est constatée, l’accélération se trouve/est réglée sur
une valeur un peu en dessous du vol plané (sans poids supplémentaire) et l’hélicoptère
commence une descente.
Une fois la perturbation de réception terminée, le pilote peut à tout moment intervenir
grâce à ses propres commandes et le programme d’atterrissage d’urgence est terminé.
3. Contrôle/surveillance de la basse tension
L’hélicoptère surveille constamment la tension de l’accu branché. Si celle-ci chute
pendant une période déterminée en dessous d’une valeur critique, ceci est signalé par
les LEDs.
Ce faisant, la LED rouge clignote et la LED verte reste allumée en continu. Cette
indication ne se désactive une fois que l’accu est débranché.
Image 02 : Sens de rotation Agrandissement de la zone centrale
Image 03 : Montage du rotor Image 03a : Circlips du moteur
16 29
Pour constater si un accu est faible pendant le vol, il est recommandé d’effectuer
de fortes poussées d’accélération. Si l’hélicoptère réagit faiblement et à action
retardée, il convient d’effectuer un atterrissage et de vérifier l’accu. Dans le cas
d’un fonctionnement de vol ininterrompu plus long, il est recommandé de plus
de vérifier aussi les témoins à LED par le biais d’un atterrissage temporaire ! Ce
test n’est difficilement détectable en raison de la puissance.
Pour éviter toute détérioration de l’hélicoptère occasionnée par une chute
en raison d’une sous-tension et/ou de l’accu en raison d’une décharge
profonde, nous vos recommandons de respecter absolument en vol les signaux
avertissant de la sous-tension. Etant donné que les LED intégrées n’émettent
un faisceau lumineux que dans une seule direction, nous vous recommandons
l’installation supplémentaire du servo saver LiPo code 230327. Le servo saver
LiPo vous avertit par un signal lumineux la sous-tension à venir. Placez le saver
LiPo à un emplacement approprié dans l’hélicoptère.
Page 17

Configuration avec le logiciel PC
Pour faire voler complètement l’hélicoptère avec ses propres paramètres, il est possible
de brancher celui-ci à un PC (via un câble d’interface série TTL sur/pour USB). Pour
le PC, vous disposez d’un logiciel à l’aide duquel vous pouvez régler/déterminer les
paramètres de vol ainsi que d’autres valeurs.
Étant donné que ceci n’est pas nécessaire pour un mode de fonctionnement de vol
normal d’effectuer une configuration au moyen du PC, ceci n’est mentionné aussi qu’en
passant. Vous trouverez des informations plus précises dans la notice du logiciel.
Un kit de configuration PC est disponible en option. Celui-ci contient un câble de
connexion, une description détaillée ainsi que le logiciel sur CD. Ce kit est disponible
pour Microsoft® Windows® XP et Windows Vista®.
Une fois que le Jumper R1 est installé/réglé, l’hélicoptère se trouve en mode
de configuration PC (mode PC) et ne peut pas voler. Il convient de retirer ce
Jumper pour un mode de fonctionnement normal de vol !
Image 16 : au dos de l’unité de contrôle/ Image 17 : Jumper R1
de commande (platine au milieu)
Vous pouvez voir le sens de rotation respectif du rotor grâce à l’inscription sur le rotor
lui-même (RIGHT pour le sens de rotation vers la droite et LEFT pour le sens de rotation
vers la gauche) ainsi que sa forme. Comparez-le avec la photo à la page 7. Calez
absolument les rondelles élastiques (voir photo 03) entre le rotor et la pale, sinon le rotor
pourrait se détacher en vol.
Assurez-vous avant chaque vol à ce que les rotors soient bien vissés
(vissés à fond) sur les moteurs. Faites extrêmement attention lors de
l’utilisation de tout outil. Un vissage trop fort peut entraîner une détérioration du moteur. L’axe peut s’enlever des roulements, le moteur
fonctionne péniblement et ceci peut avoir des répercutions négatives sur
les qualités/les propriétés de vol. C’est pourquoi il convient de vérifier
après avoir vissé les rotors à ce que ceux-ci tournent facilement. La
rondelle élastique représentée dans l’image 03a située en dessous du
moteur doit pouvoir bouger/être libre/flexible et ne pas être bloquée.
3. Montage du tube d’antenne et de la pose du câble d’antenne
Déroulez complètement le câble d’antenne et passez-le à travers
le tube d’antenne fourni, puis fixez le tube d’antenne en partant
du haut dans la fixation prévue à cet effet. Ne pressez pas le tube
d’antenne sur les côtés dans la fixation, ceci pourrait le casser ! Vous
pouvez d’enrouler le câble en suspension sur le côté extérieur du tube
d’antenne et de le fixer à l’extrémité par le ruban adhésif. Veillez à ce
que le câble d’antenne ne forme aucune boucle ou quelque chose
d’identique, ceci pouvant perturber la portée !
Faites attention à ce qu’aucune partie du câble d’antenne ne se trouve
dans le champ de rotation des rotors ou à ce que le câble d’antenne se
détache en cours de vol.
4. Fixation de l’accu
Le modèle est livré sans accu, cependant un connecteur enfichable est fourni. L’accu
que vous avez sélectionné peut être fixé au moyen du chatterton sur la partie supérieure
du châssis.
Montez le connecteur enfichable fourni (le pendant est fixé sur la câble d’alimentation
principal du circuit électronique) sur le câble de votre accu.
Respectez la polarité lors du montage de la prise du câble de l’accu !
Sur le câble d’alimentation principal, noir signifie le pôle Moins (Masse)
et rouge le pôle Plus. Évitez un court-circuit lors du montage !
28 17
Page 18

Installez l’accu dans la partie supérieure du châssis et fixez celui-ci à l’aide des fixations/
fermetures autoagrippantes déjà prémontées (voir photo, en fonction de l’accu, la vue
réelle peut diverger/dévier légèrement de la photo).
Le tableau ci-après explique les différents réglages des Jumper. A la sortie d’usine,
aucun Jumper n’est pas initialisé et l’hélicoptère se trouve en mode débutant. Les
Jumpers (les cavaliers) S 1 et S2 sont indépendants des autres jumpers !
Afin d’éviter un glissement de l’accu pendant le vol, il convient de coller un
ruban adhésif en dessous de l’accu (il est fourni avec le produit et peut être
découpé en cas de besoin). Centrez l’accu de façon à ce que l’hélicoptère ne
soit pas centré latéralement, à ce que la surface d’empennage ne soit pas trop
chargée ainsi que la tête.
Image 04 : Montage de l’accu
5. Montage du cache supérieure (déjà monté)
Utilisez les bandes/gaines en caoutchouc fournies pour le montage du cache supérieur.
Pour cela, faites passer un avant-bras dans la gaine en caoutchouc, puis resserrez cette
dernière dans le sens longitudinal au-dessus du cache, fixez-la ensuite aux crochets du
cache en plastique. Utilisez pour des raisons de sécurité deux bandes/gaines opposées.
Jumper (cavalier) Modus (Mode)
Mode débutant
Mode sport
Mode utilisateur
Image 05 : Cache
18 27
Page 19
Programmation du ROLL (Roulis)
Image 14 : Programmation su roulis
Déplacez le levier ROLL (voir image 13, ici l’axe C) en déviation maximale pour ROLL
LINKS complètement vers la gauche et maintenez-le dans cette position pendant au
moins une seconde.
L’hélicoptère détecte le canal ROLL, puis mémorise celui-ci.
Déplacez le levier ROLL à nouveau en position neutre, le levier d’accélération GAS en
position zéro.
Lors de l’activation, la LED rouge de l’hélicoptère s’éteint et la LED verte s’allume en
continu. Le processus de programmation s’est terminé avec succès.
Débranchez l’accu de l’hélicoptère, puis retirez le Jumper 2 (cavalier 2). Vous pouvez
laisser d’autres cavaliers éventuellement branchés. La programmation des canaux est
ainsi terminée.
2. Réglage du mode vol
L’hélicoptère offre 3 modes différents de vol :
- Mode débutant (conçu pour les débutants)
- Mode sport (conçu pour les pilotes d’hélicoptère expérimentés ; limitation plus faible de
l’axe et dynamique extrêmement élevée)
- Utilisateur (paramètres de vol réglables avec un logiciel PC ; voir chapitre concernant la
configuration avec logiciel PC)
6. Montage de l’indicateur du sens de la direction de vol (déjà monté)
Poussez l’indicateur de direction de vol replié dans les rails de guidage d’un des pieds
de votre choix jusqu’à ce qu’il dépasse. Il s’agit normalement du pied qui est dirigé vers
l’avant en vol direct.
L’indicateur de direction de vol monté dans un des pieds vous permet de repérer la
direction de vol. Pour le montage, il convient de vous référer à la photo 02 de la page 22.
L’indicateur de direction de vol devrait être monté dans le pied supérieur et signale ainsi
‘’vers l’avant’’.
Image 06 : Indicateur de la direction de vol
Le mode de vol est déterminé avant la mise en service par l’installation des Jumper
(cavaliers) S1 et S2 et ne peut pas être modifié pendant le fonctionnement.
Image 15 : Au dos de l’unité de contrôle (platine au milieu)
26 19
Page 20

Mise en service
Dés que l’hélicoptère est complètement monté, il peut être mis en service. Pour cela, il
vous faut un radiocommande/un émetteur télécommandé avec une bande de fréquence A
de 35 MHz avec le type de modulation suivant PPM (4 canaux au minium), une paire de
quarz adapté de 35 MHz et d’un accu LiPo à 3 éléments chargé de 2500 mAh jusqu’à
4000 mAh 20C.
Bouton/ poussoir / commutateur : sur la platine de commande se trouve un
commutateur qui peut être utilisé pour réinitialiser le circuit électronique de commande.
Pour cela, il convient de presser le bouton-poussoir une fois l’accu branché pendant 1
seconde environ. Ensuite, le circuit électronique est à nouveau activé/lancé et se met en
mode de fonctionnement indiqué par le Jumper (cavalier de configuration).
1. Configurer le récepteur radiocommandé
Pour faire voler cet hélicoptère, vous nécessitez d’une paire de quartz de 35 MHz dans
la bande de fréquence FM-A et d’une radiocommande avec le type de modulation PPM.
Choisissez la paire de quartz adapté puis connectez le quartz R (RX) au récepteur de
l’hélicoptère (voir photo 07) et le quartz T (TX) à votre radiocommande. Vous trouverez le
récepteur dans le circuit électronique central situé sous le cache plastique. Vous pouvez
le repérer par le câble d’antenne noir qui part de cet endroit.
Lors de l’activation, la LED rouge de l’hélicoptère produit 3 rythmes de pulsations (3
clignotements courts, ensuite une pause, etc.).
Image 12 : Programmer le lacet
La LED verte indique le numéro du canal dans l’étape de configuration
respective tant que le levier reste activé !
Faites impérativement attention lors du processus de programmation à ne
lever/n’actionner que le levier demandé, sinon le réglage n’est pas reconnu !
Programmation du levier NICK (axe de tangage)
Image 07 : Quartz du récepteur
Montage du quartz : retirez le cache inférieur au moyen des 4 vis ou installez
le quartz dans le récepteur au moyen d’une pince/de brucelles ou d’une
pince angulaire/d’angle en le faisant passer par le haut (à la place du cache
supérieur retiré).
Si vous utilisez la radiocommande, vérifiez impérativement à ce qu’elle soit compatible
avec le récepteur intégré, ainsi qu’avec le quartz installé (X-TAL). Il convient d’utiliser
un quartz dans une bande de fréquence FM-A de 35 MHz. Avant d’entreprendre le
premier vol, il convient d’effectuer un test de portée. Vous trouverez les quartz originaux
adaptés sous l’adresse www.conrad.de ou dans notre catalogue sous la rubrique ‘’quartz
pour récepteur de 35 MHz dans une bande de fréquence de 35 MHz pour récepteur
Modellcraft’’.
20 25
Image 13 : Programmation du levier Nick
Déplacez le levier NICK (voir image 13, ici l’axe C) en déviation maximale pour NICK
GEBEN vers le haut et maintenez-le dans cette position pendant au moins une seconde.
L’hélicoptère détecte le canal NICK, puis mémorise celui-ci.
Déplacez le levier NICK à nouveau en position neutre, le levier d’accélération GAS en
position zéro.
Lors de l’activation, la LED rouge de l’hélicoptère produit 4 rythmes de pulsations
(4 clignotements courts, ensuite une pause, etc.).
Page 21

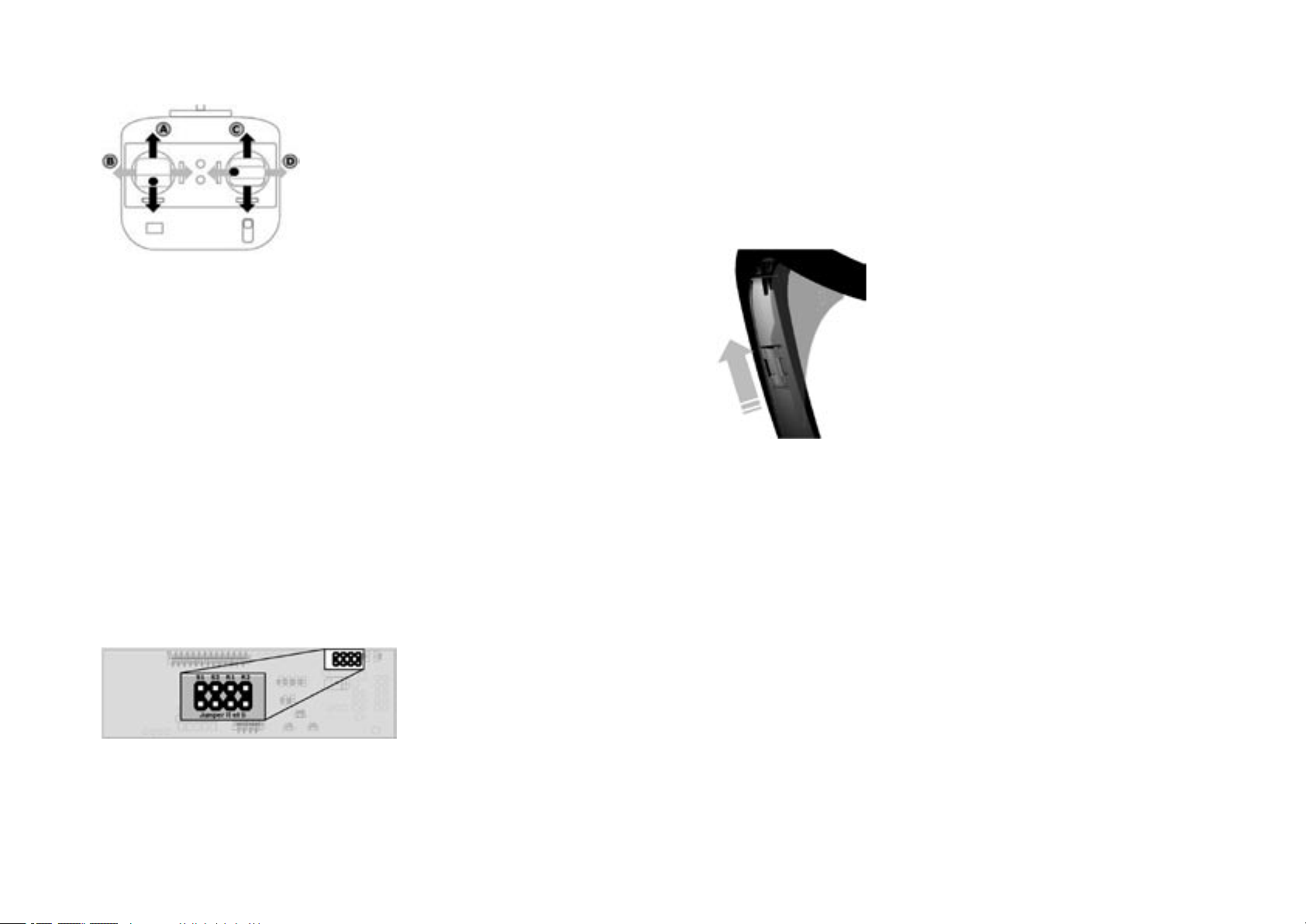
Programmation des canaux
Le Jumper R2 doit être installé. Allumez votre émetteur, sortez/déployez complètement
l’antenne de l’émetteur. Faites attention à ce que tous les leviers et les potentiomètre
de réglage de l’émetteur en position neutre. Les exemples représentés montrent le
processus au moyen d’une radiocommande en mode 2. Dans le cas où vous préférez un
autre mode, vous pouvez différencier les axes utilisés (voir annexe 1) !
Assurez-vous que les régulateurs à coulisse de la télécommande pour le
réglage/la compensation se trouvent en position neutre ! Sinon, une détection
correcte des canaux n’est pas possible ! Faites également attention à une
direction correcte des mouvements des leviers étant donné que les signaux
peuvent être mémorisés inversés ! Faites toujours fonctionner les installations
commandées par ordinateur sans mélangeur de programmes !
Déplacez le levier d’accélération (voir image 11, ici axe A) vers l’arrière en position zéro
(moteur éteint), tous les autres éléments de commande en position neutre.
Si vous voulez voler ‘’Pitch Reverse’’, placez le levier d’accélération dans la position
maximale vers l’avant avant de brancher l’accu.
Toute modification des commutateurs Reverse ne doit être effectuée
uniquement sur la radiocommande lors l’accu de vol n’est pas branché, sinon il
peut s’ensuivre des réactions trop inattendues du modèle.
2. Vérification/contrôle de la configuration
Effectuez la configuration de l’hélicoptère comme il est indiqué dans le chapitre
configuration. Il s’avère nécessaire de programmer les canaux, sinon votre hélicoptère
ne détectera pas votre émetteur. Dés que vous avez effectué ceci, l’hélicoptère est prêt à
voler (réglez auparavant la position neutre !).
Si vous utilisez le set complémentaire optionnel de Conrad, le quadrocoptére est prêt pour être configuré pour cet émetteur (4 canaux) et la
programmation des canaux n’est pas nécessaire! Lors de l’utilisation
d’une télécommande, faites voler impérativement sans mélangeur dans
un programme standard! Radiocommande Mutiplex: permuter le protocole
du servo pour toutes les 4 fonctions (accélération, roulis, tangage, lacet)
de ‘’MPX’’ à ‘’UNI’’.
Régler/programmer l’accélération
Branchez l’accu chargé à l’hélicoptère. Celui-ci commence par un contrôle automatique
et directement par la programmation des canaux. Au moyen de la position d’accélération,
l’hélicoptère détecte automatiquement quel canal vous voulez utiliser pour l’accélération.
Lors de l’activation, la LED rouge de l’hélicoptère produit 2 rythmes de pulsations
(2 clignotements courts, ensuite une pause plus longue, puis à nouveau 2 clignotements
courts, etc…).
Image 11 : Programmer l'accélération (Gas)
Régler/programmer GIER (l’axe de lacet)
Déplacez le levier GIER (l’axe de lacet) (voir image 12, ici l’axe B) vers le bas à gauche en
déviation maximale et maintenez-le dans cette position pendant au moins une seconde.
L’hélicoptère détecte le canal GIER, puis mémorise celui-ci.
Déplacez le levier GIER à nouveau en position neutre, le levier d’accélération GAS en
position zéro.
24 21
3. Réglage de la position neutre
Pour que la stabilisation de l’hélicoptère fonctionne correctement, la position neutre doit
être réglée. Ceci correspond à la position que l’hélicoptère tente de stabiliser dans la
mesure où aucune autre manœuvre de vol n’a été effectuée.
Procédez dans l’ordre suivant :
1) Allumez l’émetteur
2) Placez l’accélérateur/la pédale de gaz en position zéro et tous les autres leviers ou les
barres de stabilisation en position neutre
3) Placez l’hélicoptère sur une surface horizontale, plane !
4) Branchez l’accu à l’hélicoptère.
5) La LED rouge de l’hélicoptère doit être positionnée sur OFF et la LED verte sur ON.
6) Placez la pédale de gaz/l’accélérateur (GAZ) en déviation maximale et l’axe de
lacet en déviation droite maximale (voir photo 08).
7) La LED verte de l’hélicoptère clignote signalant la confirmation de l’activation et la
position neutre est mémorisée.
Image 08 : La position neutre
Page 22

8) Placez à nouveau l’accélérateur/la pédale de gaz en position 0, GIER (l’axe de
lacet), NICK (axe de tangage) et ROLL (roulis) en position neutre !
9) La LED rouge est positionné sur OFF et la LED verte sur ON
→ prêt à voler
Configuration
1. Détection/repérage des canaux de l’émetteur
Si la position neutre n’est pas réglée, l’hélicoptère utilise soit le réglage d’usine ou la
valeur qui vient d’être mémorisée !
Avant un premier vol, il est absolument recommandé de régler la position
neutre. En raison d’autres conditions environnantes comme dans l’usine
et/ou le lieu de vol actuel, le réglage de l’usine ne peut pas être idéal !
4. Premier démarrage/vol, activation/désactivation (arrêt) des moteurs
Démarrage/activation des moteurs
- Les LEDs indiquent ‘’prêt à voler’’.
- La pédale de gaz/l’accélérateur positionné sur zéro, GIER (l’axe de lacet) en
déviation maximale vers la gauche, NICK (axe de tangage) et ROLL (roulis) en
position neutre.
- Les rotors commencent à tourner les uns derrière les autres et passent en vitesse de
rotation à vide.
- La LED rouge clignote en continu et la LED verte clignote (‘’Moteurs activés’’).
- Augmentez lentement l’accélération en levant légèrement la pédale de gaz.
Arrêt des moteurs
Les moteurs en rotation/en fonctionnement peuvent être arrêtés en procédant de la
façon suivante :
- Positionnez la pédale de gaz/l’accélération sur zéro, GIER (l’axe de lacet) en
déviation maximale vers la droite, NICK (axe de tangage) et ROLL (roulis) en
position neutre.
- Les rotors s’arrêtent.
- La LED rouge s’éteint et la LED verte clignote en continu (‘’prêt à voler’’).
Pour effectuer un ordre/une affectation correct(e) des sticks par rapport aux ordres de
commande souhaités, il est nécessaire de programmer l’hélicoptère avec l’émetteur
utilisé. Ce faisant, l’hélicoptère mémorise/enregistre quel canal transmet telle commande.
En principe, vous pouvez choisir librement l’affectation des leviers de commande (en
fonction de vos habitudes), mais pour les débutants, il est recommandé de suivre les
exemples prévus. A la sortie d’usine, l’hélicoptère est configuré en mode 2. Dans les
exemples proposés, il s’agit du réglage d’usine pour le set complémentaire proposé en
option avec la radiocommande et d’une affectation usuelle/courante dans la pratique
de beaucoup de pilotes de modèles réduits d’avion. Réfléchissez à quelle affectation
vous voulez avoir et procédez ensuite à la programmation des canaux. Vous trouverez
d’autres possibilités pour le mode de commande 1,3 ou 4 dans l’annexe 1.
Configuration pour le mode Detect
Avant de procéder à la configuration ou programmation, il convient de
débrancher un accu branché de l’hélicoptère. Enlevez aussi un câble de raccordement éventuellement branché au PC de l’hélicoptère.
Positionnez le jumper pour le réglage de configuration RC (Remote Setting). Vous
trouverez le Jumper en haut à droite au dos de la platine du contrôleur (platine de
commande principale au milieu) de l’hélicoptère.
Image 09 : Face avant
Image 10 : Dos
Pour faire fonctionner l’hélicoptère en mode Detect, installez le Jumper
R2 comme il est indiqué sur l’image de gauche. Ce réglage dépend de
tous les autres Jumper installés.
22 23
 Loading...
Loading...