

Page 1

Anschlüsse und Signalelemente
Flight Control „QC 09“
Bedienungsanleitung Version 12/12
Best.-Nr. 20 98 40
Bestimmungsgemäße Verwendung
Die Flight Control „QC 09" kann als Ersatz- oder Tuningteil für die Modelle „QuadroCopter 450“
(Conrad Best.-Nr. 208000) und „QuadroCopter 650“ (Conrad Best.-Nr. 209300) verwendet
werden.
In den Modellen „QuadroCopter 450“ mit Best.-Nr. 239880 sowie dem „QuadroCopter 650“ mit
Best.-Nr. 275100 ist die Flight Control „QC 09“ bereits ab Werk verbaut.
Die wesentlichen Unterschiede zu der in den erstgenannten Modellen eingebauten Control& Sensorboard „QC 02“ (Flight Control) sind die höherwertigeren Sensoren in MEMSTechnologie, ein „Agility-Mode“ und eine verbesserte Steuerungs- und Regelsoftware. Auch
ist ab der Firmware 7.xx der QuadroCopter in der werksseitig eingestellten „+ Konfiguration“
(ein Landebein fliegt voraus) als auch in der „X Konfiguration“ (zwei Landebeine fliegen
voraus) fliegbar.
Diese Änderungen ergeben in Summe deutlich bessere Flugeigenschaften und ermöglichen
im „Agility-Mode“ auch einfachen Kunstflug. Zudem wurde das Layout der Platine komplett
neu gestaltet, um für künftige Zusatzmodule entsprechende Schnittstellen und
Anschlussmöglichkeiten zu schaffen. Statt Stiftleisten zur Modus-Einstellung wurden DIPSchalter verbaut.
Die Flight Control „QC 09“ kann als Ersatz- oder Tuningteil in jeden QuadroCopter ab
Verkaufsdatum 04/ 2010 eingesetzt werden.
Dieses Produkt erfüllt die gesetzlichen, nationalen und europäischen Anforderungen. Alle
enthaltenen Firmennamen und Produktbezeichnungen sind Warenzeichen der jeweiligen
Inhaber. Alle Rechte vorbehalten.
Lieferumfang
• Flight Control „QC 09“
• Flachbandkabel zu den Motordriverboards
• Bedienungsanleitung
Sicherheitshinweise
Bei Schäden, die durch Nichtbeachten dieser Bedienungsanleitung verursacht
werden, erlischt die Gewährleistung/Garantie! Für Folgeschäden übernehmen wir
keine Haftung!
Bei Sach- oder Personenschäden, die durch unsachgemäße Handhabung
oder Nichtbeachten der Sicherheitshinweise verursacht werden, übernehmen wir keine Haftung. In solchen Fällen erlischt die Gewährleistung/Garantie.
• Aus Sicherheits- und Zulassungsgründen (CE) ist das eigenmächtige Umbauen
und/oder Verändern des Produkts nicht gestattet.
• Sämtliche Sicherheitshinweise aus den Bedienungsanleitungen der Quadrocopter sind ebenfalls zu beachten.
• Das Produkt ist kein Spielzeug, es gehört nicht in Kinderhände.
• Lassen Sie das Verpackungsmaterial nicht achtlos liegen, dieses könnte für
Kinder zu einem gefährlichen Spielzeug werden.
• Gehen Sie vorsichtig mit dem Produkt um, durch Stöße, Schläge oder dem Fall aus
bereits geringer Höhe wird es beschädigt.
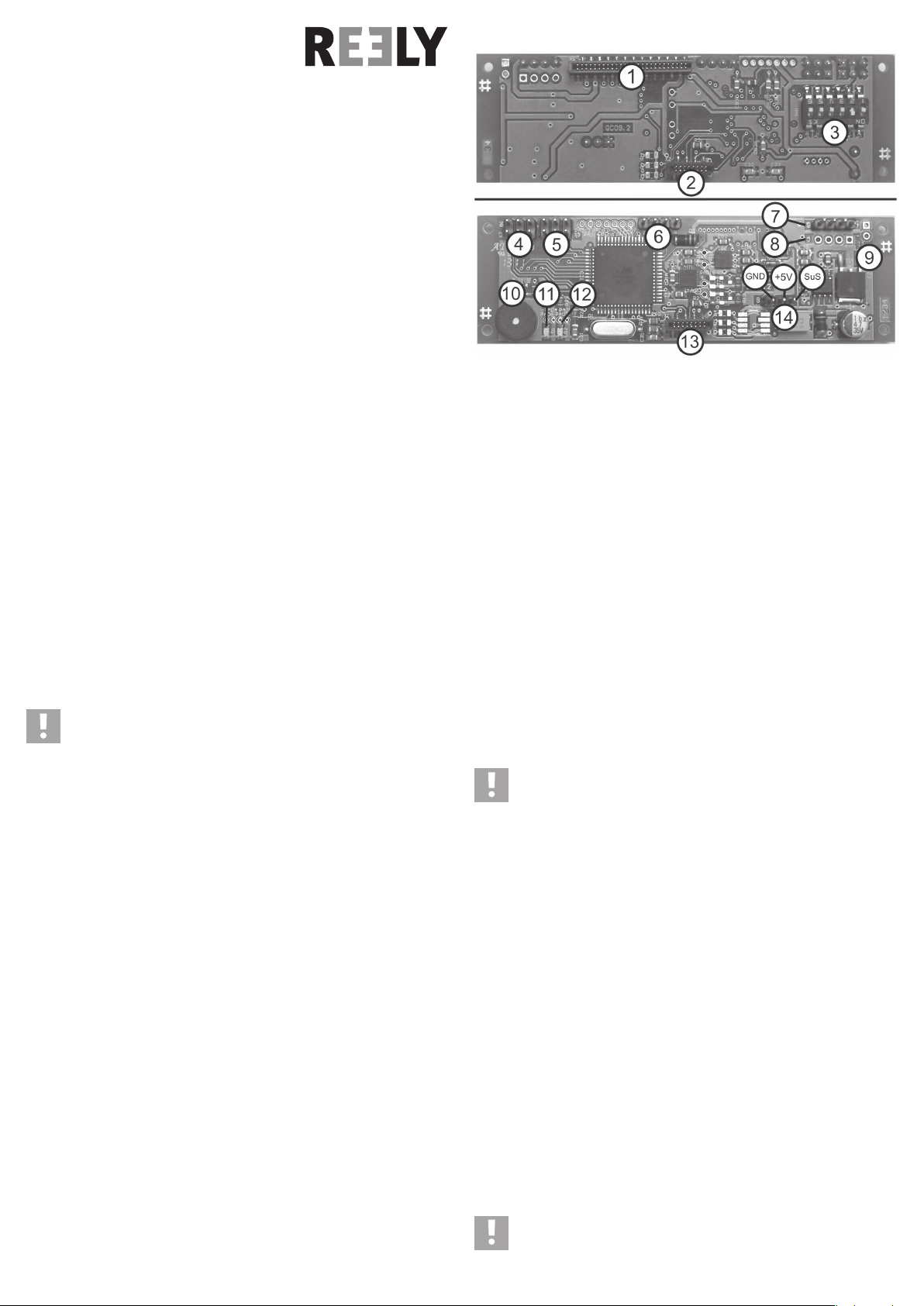
1 „X5“: Schnittstelle zu Erweiterungsboards
2 „X2“: Schnittstelle zu den Motortreibern
3 „SW1“: DIP-Schalter 1-6 für die Mode-Umschaltung
4 „X6“ / „X7“: Ohne Funktion
5 „X3“: ohne Funktion
6 „X10“: Serielle Schnittstelle zur Programmierung und Statusmeldungsausgabe
7 „X9“: zweite serielle Schnittstelle für externe Steuerbefehle (aktuelle Informationen dazu
finden Sie im Downloadcenter unter www.conrad.com)
8 „X4“: Ohne Funktion
9 „X11“: Ohne Funktion
10 Signalgeber
11 „LD1“: Grüne LED
12 „LD2“: Rote LED
13 „X1“: Schnittstelle zu den Motortreibern
14 „X8“: Summensignaleingang
Funktion „Agility-Mode“
In der Flight Control „QC 09“ sind zur Fluglagenstabilisierung hochwertige MEMS-Sensoren
eingebaut. Dadurch werden relativ einfach zu beherrschende Flugeigenschaften, ähnlich
eines Koax-Helikopters, erreicht. Die Agilität des QuadroCopters wird aber durch diese
Sensorik eingeschränkt.
Wird die Funktion „Agility-Mode“ aktiviert, werden die Sensoren in der Flight Control in Ihren
Funktionen eingeschränkt. Der Quadrocopter ist in diesem Modus um alle Achsen deutlich
agiler steuerbar. Die Flugeigenschaften ähneln nun eher einem Helikopter. Zudem ist
einfacher Kunstflug (Looping, Rollen) möglich.
Die Flugeigenschaften bei aktivierter Funktion „Agility-Mode“ sind nicht mehr für
Anfänger geeignet. Sofern Sie nicht über ausreichende Flugerfahrung mit
QuadroCoptern und/oder Helikoptern verfügen, empfehlen wir, die ersten Flüge bei
aktiviertem „Agility-Mode“ mit entsprechender Vorsicht durchzuführen.
Der „Agility-Mode“ kann ab Firmware-Version 7.xx nur noch im Sport-Mode aktiviert
werden. Das Einschalten des „Agility-Mode“ wird durch einen zweimaligen Signalton, das Ausschalten durch einen einmaligen Signalton akustisch kenntlich gemacht.
Montage der Flight Control
• Trennen Sie zunächst die Stromversorgung vom QuadroCopter, stecken Sie den Flugakku
ab.
• Entfernen Sie vom Zentralrahmen die acht Schrauben des oberen Abdeckrahmens.
• Hebeln Sie vorsichtig die seitlichen Haken bei den Motorauslegern aus und heben Sie den
oberen Abdeckrahmen ab.
• Heben Sie die alte Flight Control (altes Control- & Sensorboard) aus dem Zentralrahmen.
• Entfernen Sie von der alten Flight Control vorsichtig die Flachbandkabel zu den Motortrei-
berplatinen und den Stecker für das Summensignal.
• Verbinden Sie die Flachbandkabel von den Motortreiberplatinen mit der neuen Flight
Control.
• Verbinden Sie den Stecker für das Summensignal mit der neuen Flight Control. Beachten
Sie hierzu die richtige Polung (siehe Bild oben).
• Stecken Sie die neue Flight Control in den Zentralrahmen. Achten Sie darauf, dass die
Platine in den dafür vorgesehenen Halterungen des Zentralrahmens sitzt. Die Flight Control
soll wegen den dort vorhandenen Sensoren möglichst in der Mitte vom Zentralrahmen
montiert werden.
• Achten Sie beim Einbau der Flight Control darauf, dass die DIP-Schalter zum vorderen
Motor (rote Fahne im Landebein) und der Steckverbinder X5 zum rechten Motor zeigen.
• Setzen Sie den oberen Rahmen in den Zentralrahmen ein und verschrauben diesen wieder.
Vergewissern Sie sich nach der Montage der Platinen vor dem Anstecken des
Akkus, dass alle Steckverbindungen an Ihrem Platz sind und das keine Kurzschlüsse entstehen können. Bei Kurzschlüssen besteht die Gefahr, dass die einzelnen
Module Schaden nehmen. Verlust von Gewährleistung/Garantie!
Page 2

DIP-Schalter
Mit den DIP-Schaltern werden die gewünschten Modi gesetzt. Schalten Sie hierzu den
betreffenden Schalter in die Stellung „ON“ oder „OFF“. Folgende Schalterbelegungen sind
möglich:
Schalter „Flight Control QC 09“
1 „off“ „Beginner-Mode“
1 „on“ „Sport-Mode“
2 „off“ „Standard-Mode“
2 „on“ „User-Mode“
3 „on“ Bootloader-Mode
4 „on“ RC-Konfigurations-Mode
5 „off“ Flug-Mode in „+ Konfiguration“
5 „on“ Flug-Mode in „X-Konfiguration“
6 ohne Funktion
Hinweis zu DIP-Schalter 1:
Je nach Schalterstellung des DIP-Schalters 1 (gewählter Flug-Mode „Beginner“ oder „Sport“)
können Sie den QuadroCopter in den Standardeinstellungen der Firmware (werksseitige
Einstellungen der Parameter, der DIP-Schalter 2 steht auf „off“) oder im User-Mode mit
eigenen, veränderten Parametern (der DIP-Schalter 2 steht auf „on“) fliegen.
Änderungen der Parameter im User-Mode können mit dem optional erhältlichen KonfigurationsKit (nicht im Lieferumfang) durchgeführt werden.
Hinweis zu DIP-Schalter 2:
Werden mit dem QuadroCopter-Konfigurations-Kit im User-Mode Parameter verändert, so
werden diese im Parametersatz „User“ abgespeichert.
Werden Parameter verändert und Sie befinden sich im Parametersatz „Beginner-Mode“ (bzw.
„Sport-Mode“), so werden diese Änderungen übernommen und auch im Parametersatz „User“
gesichert. Der alte Parametersatz vom „User-Mode“ wird somit überschrieben.
Ist der DIP-Schalter 2 nicht im „User-Mode“ gesetzt (Schalter 2 nicht auf „ON“), so werden nach
einem Reset (z.B. nach einem Akkuwechsel) wieder die Standard-Beginner- bzw. SportParameter geladen.
Hinweis zu DIP-Schalter 5:
Wenn der DIP-Schalter 5 in Stellung „off“ steht, fliegt der QuadroCopter in der sogenannten
„+“-Konfiguration. Das bedeutet, dass der Ausleger (das Landebein) mit dem roten Richtungsanzeiger „vorne“ ist. Diese Konfiguration ist die Werkseinstellung und auch in der Bedienungsanleitung des QuadroCopters im Kapitel „Informationen zum ersten Start“, Unterkapitel d) bis
g) aufgezeigt.
Wenn sich der DIP-Schalter 5 in der Stellung „on“ befindet, ist die sogenannte „X“-Konfiguration eingestellt. Dies bedeutet, dass der QuadroCopter mit zwei Landebeinen voraus fliegt.
Hierbei ist es wichtig, dass der ab Werk im Ausleger montierte Richtungsanzeiger beim
Anlernen der Fernsteuerung weiterhin „Flugrichtung vorne“ bedeutet. „Vorne“ ist nun zwischen dem vorderen, linken Landebein mit Richtungsanzeiger und dem Landebein rechts
davon. Zur besseren Erkennung der Fluglage empfehlen wir, einen zweiten Richtungsanzeiger (als Ersatzteil bestellbar) zu montieren.
Erlernen der Kanäle vom Sender
An der neuen Flight Control müssen die Kanäle des Senders angelernt werden. Die LED „LD2“
(rote LED) zeigt den einzustellenden Kanal an. Die grüne LED „LD1“ zeigt an, ob der
Anlernvorgang erfolgreich war. Zum Anlernen der Fernsteuerung schalten Sie den DIPSchalter 4 auf Stellung „ON“ und gehen in den weiteren Schritten wie in der Bedienungsanleitung Ihres QuadroCopters unter „Anlernen der Kanäle vom Sender“ aufgezeigt vor.
Um Kanal 5 zu lernen, muss zusätzlich zu den Hinweisen der Bedienungsanleitung Ihres
QuadroCopters ein Schalter am Fernsteuersender zweimal betätigt werden (Aus - Ein - Aus).
Beim Anlernen von Kanal 5 bedeutet die letzte Position des angelernten Schalters, dass in
dieser Schalterstellung die Funktion „Agility-Mode“ deaktiviert ist.
Der „Agility-Mode“ kann ab Firmware 7.xx nur noch im Sport-Mode aktiviert werden.
Unabhängig davon, welchen Fernsteuermode (Mode 1 - 4, siehe auch in der Bedienungsanleitung Ihres QuadroCopters) anlernen möchten, müssen Sie nachfolgende Reihenfolge der
Kanalvergabe und hierzu die Signale der roten LED „LD2“ beachten:
Gas/Throttle LD2 blinkt (kurzzeitig beim Initialisieren) 1x
Gier LD2 blinkt 2x
Nick LD2 blinkt 3x
Roll LD2 blinkt 4x
Agility-Mode LD2 blinkt 5x
Wird nach dem Anlernen der Roll-Funktion nicht innerhalb von fünf Sekunden ein
Schalterkanal für den „Agility-Mode“ angelernt, wird die RC-Konfiguration automatisch beendet. In diesem Fall leuchtet die grüne LED „LD1“ dauerhaft, der „AgilityMode“ steht aber nicht zur Verfügung. Wollen Sie die Funktion „Agility-Mode“
anlernen, müssen Sie den Anlernvorgang erneut starten.
Der Schalter am Fernsteuersender muss auf einen beliebigen Empfängerkanal
wirken, darf jedoch nicht Kanal 1 - 4 sein bzw. durch Mischer beeinflusst werden.
Kontrollieren Sie bei Computerfernsteuersendern die Wirksamkeit des Schalters mit
einem Servo (z.B. an einen Empfänger anschließen) oder einer geeigneten Anzeige
Ihres Senders.
Auf dem Schaltkanal für den „Agility-Mode“ dürfen senderseitig weder eine Wegbegrenzung, Dual Rate, Expotentional oder andere Mischer programmiert werden.
Wichtig ist bei der Verwendung des Summensignalwandlers oder den Modulen
„QC 06“ bzw „QC 08“, dass die Kanäle in aufsteigender Reihenfolge und ohne
Auslassen eines Kanals angeschlossen sind (Kanal 1 – 4 = Grundfunktionen; Kanal
5 = Agility-Mode).
Die erlernten Kanäle können während der Anlernphase per serieller Statusmeldungen
im QuadroCopter-Konfigurations-Kit oder in einem anderen seriellen Terminal
überwacht werden.
Wird Kanal 5 nicht angelernt oder eine Fernsteuersender mit nur 4 Kanälen genutzt,
so ist die Funktion „Agility-Mode“ dauerhaft deaktiviert.
Abgleich der Neutrallage
Der Abgleich der Neutrallage wird ab Firmware V7.xx dauerhaft im QuadroCopter gespeichert. Somit muss dieser Abgleich nicht mehr bei jedem Neustart durchgeführt werden.
Nach einem Austausch der Flight Control oder einer härteren Landung empfehlen wir einmalig
den Abgleich der Neutrallage gemäß den Hinweisen der Bedienungsanleitung des QuadroCopters.
Nach Anschluss des Akkus muss hierzu bei diesem Abgleich (Initialisierung der Sensorik) das
Model absolut ruhig und waagrecht stehen.
Können innerhalb von 20 Sekunden keine konstanten Sensorwerte ermittelt werden, kann ein
ruhiger und driftfreier Flug nicht garantiert werden.
Dauert die Initialisierung länger als 20 Sekunden, sollten Sie den Akku nochmals abstecken.
und 10 Sekunden warten. Schließen Sie den Akku nochmals an.
Der QuadroCopter muss während der Initialisierung auf einer waagrechten Unterlage stehen, er darf nicht bewegt werden!
Flugbetrieb mit der Flight Control „QC 09“
Nach dem Anstecken des Flugakkus und dem Selbsttest der Flight Control ist Ihr QuadroCopter bereit zum Start. Den ersten Flugversuch sollten Sie mit eingeschalteten Sensoren
durchführen (Funktion „Agility-Mode" ist deaktiviert) und sich an die Flugeigenschaften der
neuen Flight Control gewöhnen. Nach erfolgter Eingewöhnung aktivieren Sie in ausreichender Höhe über Grund an Ihrem Fernsteuersender die Funktion „Agility-Mode". Die Sensoren
sind jetzt in ihrer Wirksamkeit eingeschränkt. Ihr QuadroCopter reagiert nun ähnlich einem
Helikopter und die Steuerreaktionen sind deutlich agiler. Sind die im „Agility-Mode" vorherrschenden Flugeigenschaften für Sie noch nicht 100%ig beherrschbar, so können Sie jederzeit
im Flug die Sensorik wieder einschalten. Der QuadroCopter hat dann wieder die gewohnten
Flug- und Steuereigenschaften.
Im „Agility-Mode" kann mit dem QuadroCopter einfacher Kunstflug (Loopings und Rollen)
durchgeführt werden. Die Durchführung dieser Flugfiguren sollten jedoch in ausreichend
großer Flughöhe durchgeführt werden.
Der „Agility-Mode“ ist nur im Sport-Mode möglich. Auch bei der Nutzung von UserParametern im Sport-Mode kann der „Agility-Mode“ zugeschaltet werden.
Für die ersten Flugversuche im „Agility-Mode" empfehlen wir Nutzern von Computerfernsteuerungen, auf den Steuerfunktionen Gier, Nick und Roll etwas Expotentional
zu mischen, um in der Mittellage der Sendersteueraggregate feinfühliger steuern zu
können.
Achten Sie auf eine besonders gute Akkubefestigung an Ihrem QuadroCopter, die
zuverlässig das Lösen oder Verrutschen des Akkus verhindert.
Anders als bei kunstflugtauglichen Helikoptern dürfen Sie bei einem Looping oder einer Rolle
in der Rückenlage des QuadroCopters nicht das Gas zurück nehmen, da die Flugbewegungen
einzig durch Drehzahländerungen der Rotoren erwirkt werden.
Ist das Gas zu niedrig, sind die möglichen bzw. erforderlichen Drehzahländerungen der
einzelnen Rotoren durch die Flight Control für Kunstflugfiguren nicht mehr durchführbar. Der
QuadroCopter wird in diesem Fall unkontrollierbar.
Page 3

LED-Anzeigen
Werden von der Flight Control während dem Selbsttest, dem Start der Motoren oder während
des Fluges Fehlfunktionen festgestellt, werden diese Funktionsstörungen per LED-Anzeigen
von „LD1" und „LD2" optisch gemeldet. Folgende LED-Codes sind möglich:
Normalbetrieb:
Initialisierung Rot und Grün dauerhaft an
Initialisierung OK, nicht gestartet Grün an, Rot aus
Motor gestartet, Gas auf Low Rot an, Grün blinkt langsam (2 Hz)
Flugbetrieb Rot an, Grün an
Notlandung Rot und Grün blinken langsamen Gleichtakt (2 Hz)
Neutrallagenabgleich Rot aus, Grün blinkt schnell (8 Hz)
Funkausfall Rot und Grün blinken langsamen Gegentakt (2 Hz)
Gas nicht auf unterster Stellung Rot und Grün blinken schnellen Gegentakt (10 Hz)
Low-Bat Level 1 und 2 Grün an, Rot blinkt langsam (8 Hz)
Motor-Fehler Grün aus, rot blinkt 2x kurz, kurze Pause
Verwenden Sie zur Steuerung des QuadroCopters eine Computerfernsteuerung mit
integrierter Failsafe-Funktion, so muss das Failsafe deaktiviert werden. Ist eine
komplette Deaktivierung des Failsafe nicht möglich, wird von der Flight Control das
Failsafe-Signal als Steuersignal erkannt.
Durch diesen Umstand könnte die Flight Control entgegen den Angaben in der
Bedienungsanleitung keine Notlandefunktion einleiten. Auch reagieren weder Signalgeber noch LED-Anzeigen wie in den Bedienungsanleitungen aufgezeigt.
In diesem Fall empfehlen wir, durch Versuche eine geeignete Gasstellung im
Failsafe-Betrieb zu ermitteln, die eine „sanfte" Landung durch entsprechende
Gassteuerung einleitet.
Wird die Ladeschlussspannung des Akkus erreicht, fängt die rote LED „LD2“ in
langsamem Rhythmus an zu blinken. Gleichzeitig fängt der Signalgeber an, in
langsamem Rhythmus Töne abzugeben. Landen Sie unmittelbar, nach dem Sie
diese Signale wahrnehmen.
Ignorieren Sie diese Signale, so erfolgt eine weitere Entladung des Akkus. Der
Signalgeber fängt dann an, in schnellem Rhythmus Warntöne auszugeben.
Werden weiterhin die Alarmsignale ignoriert, schaltet die Flight Control ab einem
bestimmten Spannungswert des Akkus die Motoren ab. Der QuadroCopter stürzt
dann unweigerlich ab. Verlust von Gewährleistung/ Garantie!
Schnittstellenbelegung Anschluss X5
Pin 1: Vbat
Pin 2: Vbat
Pin 3: Servokanal 4
Pin 4: Servokanal 3
Pin 5: Servokanal 2
Pin 6: Servokanal 1
Pin 7: Servokanal 5
Pin 8: Servokanal 6
Pin 9: Servokanal 7
Pin 10: Servokanal 8
Pin 11: noch nicht genutzt
Pin 12: noch nicht genutzt
Pin 13: noch nicht genutzt
Pin 14: noch nicht genutzt
Pin 15: noch nicht genutzt
Pin 16: Signalgeber-Status-1 (Statussignale, siehe „Akustische Meldungen des Signalgebers“)
Entsorgung
Entsorgen Sie das Produkt am Ende seiner Lebensdauer gemäß den geltenden
gesetzlichen Bestimmungen.
Technische Daten
Sensoren ............................................. MEMS-Technologie
Betriebsspannung............................... 12 V/DC (3S Lipo)
Betriebsspannung intern .................... 5 V/DC (über USB)
Abmessungen (L xB) .......................... ca. 100 x 30 mm
Akustische Meldungen des Signalgebers
Werden von der Flight Control während dem Selbsttest, dem Start der Motoren oder während
des Fluges Fehlfunktionen festgestellt, werden diese Funktionsstörungen per Signalgeber
akustisch gemeldet. Folgende Codes sind möglich:
Gyro-Fehler beim Nullabgleich Roll 1 x Beep kurz, dann 1 s Pause
Gyro-Fehler beim Nullabgleich Nick 2 x Beep kurz, dann 1 s Pause
Gyro-Fehler beim Nullabgleich Gier 3 x Beep kurz, dann 1 s Pause
Motor-Fehler vorne 1 x Beep lang, 1 x kurz, dann 1 s Pause (in der X-
Motor-Fehler hinten 1 x Beep lang, 2 x kurz, dann 1 s Pause (in der X-
Motor-Fehler rechts 1 x Beep lang, 3 x kurz, dann 1 s Pause (in der X-
Motor-Fehler links 1 x Beep lang, 4 x kurz, dann 1 s Pause (in der X-
Notlandung Dauerton
Unterspannung Level 1 1 Hz (langsame Tonfolge)
Unterspannung Level 2 2,5 Hz (schnellere Tonfolge)
Signalisierung Flugbereitschaft 1 x Beep 500 ms Länge (kurzer Ton)
Signalisierung Nullabgleich 1 x Beep 500 ms Länge (kurzer Ton)
Signalisierung Motorstart 1 x Beep 500 ms Länge (kurzer Ton)
Signalisierung Motorstopp 1 x Beep 500 ms Länge (kurzer Ton)
Beachten Sie auch bei den akustischen Meldungen des Signalgebers alle Hinweise,
die in dieser Bedienungsanleitung unter dem Punkt „LED-Anzeigen“ beschrieben
werden.
Konfiguration vorne links)
Konfiguration hinten rechts)
Konfiguration vorne rechts)
Konfiguration hinten links)
Bootloader-Betrieb
Im Bootloader-Betrieb muss die grüne LED „LD1“ dauerhaft mit ca. 1 Hz blinken. Die rote LED
„LD2“ blinkt während der Kommunikation mit dem Computer in schnellem, unterschiedlichem
Rhythmus.
Diese Bedienungsanleitung ist eine Publikation der Conrad Electronic SE, Klaus-Conrad-Str. 1,
D-92240 Hirschau (www.conrad.com).
Alle Rechte einschließlich Übersetzung vorbehalten. Reproduktionen jeder Art, z. B. Fotokopie,
Mikroverfilmung, oder die Erfassung in elektronischen Datenverarbeitungsanlagen, bedürfen der
schriftlichen Genehmigung des Herausgebers. Nachdruck, auch auszugsweise, verboten.
Diese Bedienungsanleitung entspricht dem technischen Stand bei Drucklegung. Änderung in Technik
und Ausstattung vorbehalten.
© Copyright 2012 by Conrad Electronic SE. V3_1212_01
Page 4

Connections and signalling elements
Flight Control „QC 09“
Operating Instructions Version 12/12
Item no. 20 98 40
Intended Use
The Flight Control „QC 09“ can be used as a spare and tuning part for the models
„QuadroCopter 450“ (Conrad item no. 208000) and „QuadroCopter 650“ (Conrad item no.
209300).
In the models „QuadroCopter 450“ with item no. 239880 and the „QuadroCopter 650“ with item
no. 275100, the flight control „QC 09“ is installed ex works already.
The essential differences to the control & sensor board „QC02“ (Flight Control) installed in the
models named are the higher-quality sensors in MEMS technology, an „agility mode“ and
improved range and control software. As of firmware 7.xx, QuadroCopter can also be flown in
the factory-set „+ configuration“ (one landing leg ahead) and the „X configuration“ (two landing
legs ahead).
Together, the changes lead to better flight characteristics and enable simple freestyle flight in
„agility mode“. Additionally, the PCB layout was entirely redesigned to create interfaces and
connection options for future additional modules. Instead of pin strips, the mode is set with DIP
switches.
The Flight Control „QC 09“ can be used as spare or tuning part in every QuadroCopter sold
04/2010 or later.
This product complies with the statutory national and European requirements. All company
names and product names are trademarks of their respective owners. All rights reserved.
Scope of Delivery
• Flight Control „QC 09“
• Flat cable for the motor driver boards
• Operating instructions
Safety Information
The guarantee/warranty will expire if damage is incurred resulting from noncompliance with the operating instructions! We do not assume any liability for
consequential damage!
Nor do we assume any liability for damage to property or personal injury caused
by improper use or failure to observe the safety information. In such cases the
warranty/guarantee is voided.
• The unauthorized conversion and/or modification of the product is prohibited for
safety and approval reasons (CE).
• All safety notes from the QuadroCopter operating instructions must be observed as
well.
• This product is not a toy and not suitable for children.
• Do not leave packaging material unattended. It may become a dangerous toy for
children.
• Handle the product with care; impacts, shock or fall even from low heights will
damage it.
1 „X5“: Interface to the expansion boards
2 „X2“: Interface to the motor drivers
3 „SW1“: DIP switches 1-6 for mode changing
4 „X6“ / „X7“: No function
5 „X3“: No function
6 „X10“: Serial interface for programming and status message output
7 „X9“: Second serial interface for external control commands (up-to-date information on this
are available in the download centre at www.conrad.com)
8 „X4“: No function
9 „X11“: No function
10 Signal encoder
11 „LD1“: Green LED
12 „LD2“: Red LED
13 „X1“: Interface to the motor drivers
14 „X8“: Composite signal input
„Agility Mode“ Function
The Flight Control „QC 09“ has high-quality MEMS sensors installed for flight position stabilisation.
This leads to relatively easy to control flight characteristics similar to those of a coax helicopter.
The QuadroCopter agility is limited by these sensors, however.
Activating the „agility mode“ function limits the Flight Control sensors in their functions. The
QuadroCopter can be controlled much more agile around all axes in this mode. The flight
characteristics are now closer to those of a helicopter. Simple freestyle flight (looping, rolls) is
possible as well.
The flight characteristics with active „Agility mode“ function are not suitable for
beginners. If you do not have sufficient flight experience with QuadroCopters and/or
helicopters, we recommend performing the first flights with active „agility mode“ with
appropriate care.
The „Agility-Mode“ can be activated in sports mode only as of firmware version 7.xx.
Activation of the „Agility-Mode“ is shown by two signal sounds, deactivation by one
signal sound.
Flight Control Assembly
• First disconnect the power supply from the QuadroCopter, unplug the flight battery.
• Remove the eight screws of the upper cover frame from the central frame.
• Carefully unhook the lateral hooks in the motor booms and lift off the top cover frame.
• Lift the old Flight Control (old control & sensor board) from the central frame.
• Carefully remove the flat cables to the motor driver PCBs from the old flight control and the plug
for the composite signal.
• Connect the flat cables of the motor driver PCBs to the new flight control.
• Connect the plug for the composite signal to the new flight control. Observe correct polarity (see
figure above).
• Plug the new flight control in the centre frame. Observe that the PCB is placed in the intended
holders of the central frame. The flight control should be installed as centrally on the central
frame as possible because of the sensors there.
• When installing the flight control, observe that the DIP switches for the front motor (red flag in
the landing leg) and the plug connector X5 point towards the right motor.
• Insert the top frame in the central frame and screw it on again.
After PCB assembly and before plugging in the rechargeable batteries, make sure that
all plug connections are in place and that no short circuits can occur. Short circuits pose
a danger of damage to the individual modules. Loss of guarantee/warranty!
Page 5

DIP switches
The desired modes are set with the DIP switches. Switch the corresponding switch to „ON“ or
„OFF“ for this. The following switch assignments are possible:
Switch „Flight Control QC 09“
1 „off“ „Beginner-Mode“
1 „on“ „Sport-Mode“
2 „off“ „Standard-Mode“
2 „on“ „User-Mode“
3 „on“ Bootloader mode
4 „on“ RC confirmation mode
5 „off“ Flight mode in „+ Configuration“
5 „on“ Flight mode in „X Configuration“
6 No function
Note on DIP switch 1:
Depending on switch position of DIP switch 1 (selected flight mode „Beginner“ or „Sport“), the
QuadroCopter can be flown in the default settings of the firmware (factory settings of the
parameters, DIP switch 2 is set to „off“) or in user mode with own, changed parameters (DIP
switch 2 set to „on“).
Changes to the parameters in the user mode can be performed with the optional configuration
kit (not enclosed).
Note on DIP switch 2:
If parameters are changed in user mode with the QuadroCopter configuration kit, they are stored
in the parameter set „User“.
If parameters are changed in the parameter set „Beginner mode“ (or „Sport mode“), these
changes are accepted and also stored in the parameter set „user“. The old parameter set for
„User mode“ is overwritten.
If the DIP switch 2 is not set in „User mode“ (switch 2 not set to „ON“), the started beginner (or
sport) parameters are loaded again after reset (e.g. after battery change).
Note on DIP switch 5:
If the DIP-switch 5 is set to „off“, the QuadroCopter flies in the „+“ configuration. This means that
the boom (the landing leg) with the red direction indicator is „front“. This configuration is the factory
setting and also indicated in the operating instructions of the QuadroCopters in chapter
„Information on the First Take-Off“, subchapter d) to g).
If the DIP-switch 5 is set to „on“, the „X“ configuration is set. This means that the QuadroCopter
flies with two landing legs ahead. It is important that the direction indicator installed in the boom
ex works continues to mean „flight direction forward“ when teaching in the remote control.
„Front“ is now between the front left landing leg with the direction indicator and the landing leg
to its right. For better recognition of the flight position, install a second direction indicator
(available as a spare part).
Teaching the channels of the transmitter
The channels of the transmitter must be taught to the new flight control. The LED „LD2“ (red LED)
displays the channel to be set. The green LED „LD1“ shows whether teaching was successful.
To teach in the remote control, put the DIP switch 4 to position „ON“ and proceed as explained
in „Teaching in the channels of the transmitter“ in your QuadroCopter’s operating instructions in
the next steps.
To teach in channel 5, you have to push a sw5tich of your remote control transmitter twice (off
- on - off) in addition to the notes in the operating instructions of your QuadroCopter. When
teaching in channel 5, the last position of the taught-in switch means that the „agility mode“
function is deactivated in this switch position.
The „Agility-Mode“ can be activated in sports mode only as of firmware 7.xx.
Independently of what remote control mode (mode 1 - 4, also see operating instructions of your
QuadroCopter) you want to teach in you have to observe the following order of channel
assignment and the signals of the red LED „LD2“:
Throttle LD2 flashes (briefly during initialisation) 1x
Yaw LD2 flashes 2x
Pitch LD2 flashes 3x
Roll LD2 flashes 4x
Agility mode LD2 flashes 5x
If you do not teach in a switching channel for „agility mode“ within five seconds of
teaching in the roll function, the RC configuration is interrupted automatically. In this
case, the green LED „LD1“ is permanently lit, but the „agility mode“ is not available. If
you want to teach in the function „Agility mode“, you have to start the teaching process
again.
The remote control transmitter switch may act on any receiver channel but must not be
channel 1 - 4 or be influenced by mixers.
Check the switch effectiveness in computer remote control transmitters with a servo
(e.g. connect to a receiver) or a suitable transmitter display.
No path limitation, dual rate, expositional or other mixers must be programmed on the
switching channel for „agility mode“. It is important when using the composite signal
converter or the modules „QC 06“ or „QC 08“ that the channels are connected bottomup and without leaving out any channel (channel 1 – 4 = basic functions; channel 5 =
agility mode).
The taught-in channels can be monitored via serial status messages in the QuadroCopter configuration kit or another serial terminal during the teaching stage.
If channel 5 is not taught in or a remote control with only 4 channels is used, the „agility
mode“ function is permanently deactivated.
Adjustment of the Neutral Position
Reconciliation of the neutral position is saved permanently in the QuadroCopter as of firmware
V7.xx. Thus, this reconciliation no longer has to be performed in every restart.
After replacement of the flight control or a harder landing, we recommend reconciliation of the
neutral position according to the instructions in the operating instructions of the QuadroCopter.
After connection of the battery, the model must be standing perfectly still and horizontal for this
reconciliation (sensor initialisation).
If no consistent sensor values can be determined within 20 seconds, calm and drift-free flight
cannot be warranted.
If initialisation takes longer than 20 seconds, disconnect the battery again and wait for 10
seconds. Connect the rechargeable battery again.
The QuadroCopter must be standing on a horizontal underground during initialisation.
It must not be moved!
Flight operation with the flight control „QC 09“
After connecting the flight battery and self-test of the flight control, your QuadroCopter is ready
to start. The first flight test should be made with the sensors on (function „agility mode“ off) to get
used to the flight characteristics of the new flight control. After getting used to them, activate the
„agility mode“ function on your remote control transmitter at a sufficient distance from the ground.
The sensors are now limited in their function. Your QuadroCopter now reacts similar to a
helicopter and the control reactions are much more agile. If the flight characteristics that prevail
in „agility mode“ are not yet 100% controllable for you, you may switch on the sensors again in
flight at any time. The QuadroCopter then returns to the usual flight and control characteristics.
In „agility mode“, the QuadroCopter can be used for simple freestyle flying (loopings and rolls).
Such flight figures should, however, be performed at a sufficient height.
„Agility mode“ is only available in sports mode. The „agility mode“ can be activated
when using user parameters in sports mode as well.
For the first flight attempts in „agility mode“, we recommend that computer remote
control users mix a little expotentional on the control functions yaw, pitch and roll to
control the centre position of the remote control units more precisely.
Observe particularly good battery attachment to your QuadroCopter to reliably prevent
loosening or slipping of the battery.
In contrast to freestyle-capable helicopters, never reduce the throttle during a looping or roll while
the QuadroCopter is on its back, since the flight motions are only achieved by speed changes of
the rotors.
If the throttle is too low, the speed changes of the individual rotors by flight control possible or
required for the flight figures can no longer be achieved. The QuadroCopter can no longer be
controlled in such cases.
Page 6
LED Displays
If the flight control determines any malfunctions during self-test, motor start or in flight, these
functional problems are visually indicated via the LED displays of „LD1“ and „LD2“. The following
LED codes are possible:
Normal operation:
Initialisation Red and green on permanently
Initialising OK, not started Green on, red off
Motor on, throttle to low Red on, green flashes slowly (2 Hz)
Flight Operation Red on, green on
Emergency Landing Red and green flash slowly in time (2 Hz)
Neutral position reconciliation Red off, green flashes quickly (8 Hz)
Radio loss Red and green flash slowly in counter-time (2 Hz)
Throttle not in the bottom-most position Red and green flash quickly counter-time (10 Hz)
Low-Bat level 1 and 2 Green on, red flashes slowly (8 Hz)
Motor error Green off, red flashes 2x brief, brief break
If you control the QuadroCopter with a computer remote control with integrated failsafe
function, the failsafe must be deactivated. If the failsafe cannot be deactivated entirely,
the flight control will recognise the failsafe signal as a control signal.
This will prevent the flight control from initiating emergency landing function contrary
to the information of the operating instructions. Signal encoder and LED displays also
will not react as shown in the operating instructions.
In this case, we recommend to try and determine a suitable throttle position in failsafe
operation that will initiate „gentle“ landing by the corresponding throttle control.
If the charging end voltage of the battery is reached, the red LED „LD2“ will flash at a
slow rhythm. At the same time, the signal encoder will start emitting sounds at a slow
rhythm. Land at once when you notice these signals.
If you ignore these signals, the battery will be discharged further. The signal encoder
then starts emitting warning sounds at a quick rhythm.
If the alarm signals are still ignored the flight control will switch off the motors when the
battery drops below a specified voltage. The QuadroCopter will crash. Loss of
guarantee/warranty!
Interface assignment connection X5
Pin 1: Vbat
Pin 2: Vbat
Pin 3: Servo channel 4
Pin 4: Servo channel 3
Pin 5: Servo channel 2
Pin 6: Servo channel 1
Pin 7: Servo channel 5
Pin 8: Servo channel 6
Pin 9: Servo channel 7
Pin 10: Servo channel 8
Pin 11: Not used yet
Pin 12: Not used yet
Pin 13: Not used yet
Pin 14: Not used yet
Pin 15: Not used yet
Pin 16: Signal encoder status-1 (status signals, see „Acoustic messages of the signal encoder“)
Disposal
Dispose of the product according to the applicable statutory provisions at the end of its
service life.
Technical Data
Sensors ............................................... MEMS technology
Operating voltage ................................ 12 V/DC (3S Lipo)
Operating voltage internal ................... 5 V/DC (via USB)
Dimensions (L x W) ............................. approx. 100 x 30 mm
Acoustic signal encoder messages
If the flight control determines any malfunctions during self-test, motor start or in flight, these
functional problems are acoustically indicated via the signal encoder. The following codes are
possible:
Gyro error at zero reconciliation roll 1 x brief beep, then 1 s break
Gyro error at zero reconciliation pitch 2 x brief beep, then 1 s break
Gyro error at zero reconciliation yaw 3 x brief beep, then 1 s break
Motor error front 1 x long beep, 1 x brief, then 1 s break (in X-configuration
Motor error rear 1 x long beep, 2 x brief, then 1 s break (in X-configuration
Motor error right 1 x long beep, 3 x brief, then 1 s break (in X-configuration
Motor error left 1 x long beep, 4 x brief, then 1 s break (in X-configuration
Emergency Landing Permanent sound
Undervoltage level 1 1 Hz (slow sound sequence)
Undervoltage level 2 2.5 Hz (quick sound sequence)
Signalling readiness for flight 1 x beep 500 ms long (brief sound)
Signalling zero reconciliation 1 x beep 500 ms long (brief sound)
Signalling motor start 1 x beep 500 ms long (brief sound)
Signalling motor stop 1 x beep 500 ms long (brief sound)
Also observe all notes described in these operating instructions, item „LED displays“
in acoustic messages of the signal encoder.
front left)
rear left)
front right)
rear left)
Bootloader operation
In boot loader operation, the green LED „LD1“ must flash continually at approx. 1 Hz. The red LED
„LD2“ flashes at a quick, irregular rhythm during communication with the computer.
These operating instructions are a publication by Conrad Electronic SE, Klaus-Conrad-Str. 1,
D-92240 Hirschau (www.conrad.com).
All rights including translation reserved. Reproduction by any method, e.g. photocopy, microfilming,
or the capture in electronic data processing systems require the prior written approval by the editor.
Reprinting, also in part, is prohibited.
These operating instructions represent the technical status at the time of printing. Changes in
technology and equipment reserved.
© Copyright 2012 by Conrad Electronic SE.
Page 7
Raccords et éléments de signalisation
Régulateur de vol « QC 09 »
Notice d’emploi Version 12/12
N° de commande 20 98 40
Utilisation conforme
Le régulateur de vol « QC 09 » peut être employé comme pièce de rechange ou de tuning pour
les modèles réduits « QuadroCopter 450 » (n° de commande Conrad 208000) et « QuadroCopter 650 » (n° de commande Conrad 209300).
Les modèles réduits « QuadroCopter 450 » avec le n° de commande 239880 et « QuadroCopter 650 » avec le n° de commande 275100 sont déjà équipés en usine du régulateur de
vol « QC 09 ».
Les principales différences avec la platine de commande et de capteurs « QC 02 » (régulateur
de vol) intégrée aux modèles réduits susmentionnés sont les capteurs de qualité supérieure
à technologie MEMS, un « mode Agility » et un logiciel amélioré pour le pilotage et la
régulation. À partir de la version 7.xx du micrologiciel, les QuadroCopter peuvent également
être pilotés avec la « Configuration + » programmée en usine (une jambe d’atterrissage en
avant) ou la « Configuration + » (deux jambes d’atterrissage en avant).
Dans l’ensemble, ces modifications offrent des caractéristiques de vol améliorées et permettent
de réaliser des figures acrobatiques simples en « mode Agility ». Le concept de la platine a
également complètement été remanié afin de proposer des interfaces et raccords
correspondants pour d’éventuels modules supplémentaires. Pour le réglage du mode, des
barrettes à broches remplacent les interrupteurs DIP.
En tant que pièce de rechange et de tuning, le régulateur de vol « QC 09 » peut être installé
dans tous les QuadroCopter vendus à partir de 04/2010.
Ce produit est conforme aux exigences légales, nationales et européennes. Tous les noms
d’entreprises et appellations de produits contenus dans ce mode d’emploi sont des marques
déposées des propriétaires correspondants. Tous droits réservés.
Étendue de la livraison
• Régulateur de vol « QC 09 »
• Câble plat pour les cartes de puissance de moteur
• Mode d’emploi
Consignes de sécurité
Tout dommage résultant d’un non-respect du présent mode d’emploi entraîne
l’annulation de la garantie ! Nous déclinons toute responsabilité pour les
dommages consécutifs !
Nous déclinons toute responsabilité pour les dommages matériels ou corporels
qui résultent d’une manipulation de l’appareil non conforme aux spécifications
ou du non-respect des présentes consignes de sécurité. De tels cas entraînent
l’annulation de la garantie ou garantie légale.
• Pour des raisons de sécurité et d’homologation (CE), il est interdit de modifier et / ou
de transformer soi-même le produit.
• Également observer toutes les consignes de sécurité indiquées dans les modes
d’emploi des Quadrocopter.
• Le produit n’est pas un jouet, le tenir hors de portée des enfants.
• Ne laissez pas traîner le matériel d’emballage. Il pourrait devenir un jouet dangereux
pour les enfants.
• Ce produit doit être manipulé avec précaution ; les coups, les chocs ou une chute,
même d’une faible hauteur, pourraient l’endommager.
1 « X5 » : interface pour les platines d’extension
2 « X2 » : interface pour les pilotes du moteur
3 « SW1 » : interrupteurs DIP 1 à 6 pour la commutation des modes
4 « X6 » / « X7 » : sans fonction
5 « X3 » : sans fonction
6 « X10 » : interface sérielle pour la programmation et l’affichage des messages d’état
7 « X9 » : seconde interface sérielle pour les commandes externes (des informations actuelles
à ce sujet sont disponibles dans le centre de téléchargement sur le site www.conrad.com)
8 « X4 » : sans fonction
9 « X11 » : sans fonction
10 Générateur de signaux
11 « LD1 » : DEL verte
12 « LD2 » : DEL rouge
13 « X1 » : interface pour les pilotes du moteur
14 « X8 » : entrée du signal composite
Fonction « mode Agility »
Des capteurs MEMS de grande qualité sont intégrés au régulateur de vol « QC 09 » pour la
stabilisation de position de vol. Cela permet de maîtriser les caractéristiques de vol relativement
facilement, comme avec un hélicoptère coaxial. Cette technique de capteurs limite cependant
l’agilité du QuadroCopter.
Lorsque la fonction « mode Agility » est activée, les fonctions des capteurs du régulateur de vol
sont limitées. Dans ce mode, le Quadrocopter peut être piloté avec une agilité nettement
améliorée sur tous les axes. Les caractéristiques de vol ressemblent alors plutôt à celles d’un
hélicoptère. Il est alors également possible de réaliser des figures acrobatiques (looping,
tonneaux).
Lorsque la fonction « mode Agility » est activée, les caractéristiques de vol ne
conviennent plus aux débutants. Lorsque vous ne disposez pas encore d’une expérience
suffisante avec les QuadroCopter et / ou les hélicoptères, nous vous recommandons
de faire preuve d’une grande prudence durant les premiers vols en « mode Agility ».
À partir de la version 7.xx du micrologiciel, le « mode Agility » peut uniquement encore
être activé en mode Sport. L’activation du « mode Agility » est signalisée par une deux
tonalités, la désactivation par une seule tonalité.
Montage du régulateur de vol
• Coupez d’abord l’alimentation électrique du QuadroCopter, débranchez la batterie de propulsion.
• Dévissez les huit vis du cache de protection supérieur sur le cadre central.
• Soulevez avec précaution les crochets latéraux des flèches du moteur puis soulevez le cache
de protection supérieur.
• Soulevez l’ancien régulateur de vol (ancienne platine de commande et de capteurs) du cadre
central.
• Débranchez avec précaution les câbles plats et le connecteur pour le signal composite de
l’ancien régulateur de vol des cartes de puissance du moteur.
• Reliez les câbles plats des cartes de puissance du moteur au nouveau régulateur de vol.
• Branchez le connecteur du signal composite sur le nouveau régulateur de vol. Respectez alors
la polarité (voir figure du haut).
• Insérez le nouveau régulateur de vol dans le cadre central. Veillez à ce que la platine s’insère
correctement dans les supports prévus à cet effet sur le cadre central. En raison des capteurs
qui y sont installés, le régulateur de vol doit être centré dans le cadre central.
• Lors du montage du régulateur de vol, veillez à ce que les interrupteurs DIP pour le moteur
avant (drapeau rouge dans la jambe d’atterrissage) et le connecteur à fiches X5 pointent vers
le moteur de droite.
• Insérez le cache supérieur dans le cadre central et revissez-le.
Après le montage des platines, assurez-vous que tous les connecteurs à fiches soient
à leur place et qu’il n’y ait aucun court-circuit avant de brancher la batterie. En présence
de courts-circuits, vous risqueriez d’endommager les différents modules. Perte de la
garantie ou garantie légale !
Page 8

Interrupteurs DIP
Les interrupteurs DIP permettent de définir les modes respectifs. Commutez l’interrupteur
correspondant en position « ON » ou « OFF ». Les interrupteurs peuvent être affectés de la
manière suivante :
Interrupteur « Régulateur de vol QC 09 »
1 « off » « Mode Beginner »
1 « on » « Mode Sport »
2 « off » « Mode Standard »
2 « on » « Mode User »
3 « on » Mode Bootloader
4 « on » Mode de configuration RC
5 « off » Mode de vol avec « Configuration + »
5 « on » Mode de vol avec « Configuration X »
6 sans fonction
Remarque à propos de l’interrupteur DIP 1 :
En fonction de la position de l’interrupteur DIP 1 (mode de vol sélectionné « Beginner » ou
« Sport »), vous pouvez faire voler le QuadroCopter avec les réglages par défaut du micrologiciel
(réglage en usine des paramètres, l’interrupteur DIP 2 est commuté sur « off ») ou en mode User
avec vos propres paramètres (l’interrupteur DIP 2 est commuté sur « on »).
En mode User, les paramètres peuvent être modifiés à l’aide du kit de configuration disponible
en option (non fourni).
Remarque à propos de l’interrupteur DIP 2 :
Lorsque des paramètres sont modifiés dans le « mode User » à l’aide du kit de configuration du
QuadroCopter, ces paramètres sont enregistrés dans le jeu de paramètres « User ».
Lorsque des paramètres sont modifiés et que vous vous trouvez dans le jeu de paramètres
« mode Beginner » (ou « mode Sport »), ces modifications sont appliquées et elles sont
également enregistrées dans le jeu de paramètres « User ». L’ancien jeu de paramètres du
« mode User » est alors écrasé.
Lorsque l’interrupteur DIP 2 n’est pas commuté en « mode User » (l’interrupteur 2 ne se trouve
pas en position « ON »), les paramètres par défaut, Beginner ou Sport, sont alors à nouveau
chargés après une réinitialisation (par ex. après remplacement d’une batterie).
Remarque à propos de l’interrupteur DIP 5 :
Lorsque l’interrupteur DIP 5 se trouve en position « off », le QuadroCopter vole avec la
configuration dite « + ». Cela signifie que le balancier (la jambe d’atterrissage) se trouve
« à l’avant » avec l’indicateur de direction rouge. Cette configuration correspond aux réglages
d’usine et est également expliquée dans le chapitre « Informations à propos du premier
décollage », sous-chapitres d) à g), du mode d’emploi du QuadroCopter.
Lorsque l’interrupteur DIP 5 se trouve en position « on », la configuration dite « X » est activée.
Cela signifie que le QuadroCopter vole avec deux jambes d’atterrissage en avant. Il est ici
essentiel que l’indicateur de direction monté en usine corresponde toujours encore à la
« direction de vol vers l’avant » après la procédure d’apprentissage de la télécommande.
« Vers l’avant » se trouve maintenant entre la jambe d’atterrissage avant gauche avec indicateur
de direction et la jambe d’atterrissage à droite. Pour reconnaître plus facilement l’assiette, nous
recommandons de monter un deuxième indicateur de direction (disponible comme pièce de
rechange).
Apprentissage des canaux de l’émetteur
Le nouveau régulateur de vol doit apprendre les canaux de l’émetteur. La DEL « LD2 » (DEL
rouge) indique le canal à programmer. La DEL verte « LD1 » indique si la procédure
d’apprentissage a été effectuée avec succès. Pour effectuer la procédure d’apprentissage de la
télécommande, commutez l’interrupteur DIP 4 en position « ON » puis procédez de la manière
indiquée dans la rubrique « Apprentissage des canaux de l’émetteur » du mode d’emploi de
votre QuadroCopter.
Pour effectuer l’apprentissage du canal 5, vous devez, outre les indications dans le mode
d’emploi de votre QuadroCopter, actionner deux fois un interrupteur sur l’émetteur de la
télécommande (arrêt / marche / arrêt). Lors de l’apprentissage du canal 5, la dernière position
de l’interrupteur en cours d’apprentissage signifie que la fonction « mode Agility » est désactivée
lorsqu’il se trouve dans cette position.
À partir de la version 7.xx du micrologiciel, le « mode Agility » peut uniquement encore
être activé en mode Sport.
Indépendamment du mode de télécommande (modes 1 à 4, voir également dans le mode
d’emploi de votre QuadroCopter) pour lequel vous souhaitez effectuer l’apprentissage, vous
devez observer l’ordre suivant pour l’affectation des canaux et alors tenir compte des signaux de
la DEL rouge « LD2 » :
Gaz / Throttle LD2 clignote 1 fois (brièvement durant l’initialisation)
Lacet LD2 clignote 2 fois
Tangage LD2 clignote 3 fois
Roulis LD2 clignote 4 fois
Mode Agility LD2 clignote 5 fois
Lorsque la procédure d’apprentissage n’est pas poursuivie pour un canal d’interrupteur
pour le « mode Agility » dans les cinq secondes qui suivent l’apprentissage de la
fonction de roulis, la configuration RC est automatiquement terminée. En tel cas, la
DEL verte « LD1 » reste allumée, mais le « mode Agility » n’est pas disponible. Pour
effectuer l’apprentissage de la fonction « mode Agility », vous devez redémarrer la
procédure d’apprentissage.
L’interrupteur sur l’émetteur de la télécommande doit agir sur un canal quelconque de
l’émetteur, qui ne doit toutefois pas être le canal 1 à 4 ou être influencé par le
mélangeur.
Avec les émetteurs de télécommande d’ordinateur, contrôlez l’efficacité de l’interrupteur
à l’aide d’un servo (par ex. en le raccordant à un émetteur) ou d’un affichage approprié
de votre émetteur.
Aucune limitation de course, Dual Rate, exponentiel et autres mélangeurs ne doivent
être programmés, côté émetteur, sur le canal de commutation pour le « mode Agility ».
En cas d’utilisation du convertisseur de signal composite ou des modules « QC 06 »
ou « QC 08 », il est essentiel que les canaux soient raccordés dans l’ordre croissant
et sans sauter aucun canal (canaux 1 à 4 = fonctions de base ; canal 5 = mode Agility).
Durant la procédure d’apprentissage, les canaux appris peuvent être surveillés via
messages d’état sériels dans le kit de configuration du QuadroCopter ou sur un autre
terminal sériel.
Lorsque l’apprentissage du canal 5 n’est pas effectué ou que l’émetteur de la
télécommande ne comporte que 4 canaux, la fonction « mode Agility » est désactivée
de manière permanente.
Synchronisation de la position neutre
À partir de la version V7.xx du micrologiciel, la synchronisation de la position neutre est
durablement enregistrée sur le QuadroCopter. Cette synchronisation ne doit donc plus être
réalisée après chaque redémarrage.
En cas de remplacement du régulateur de vol ou après un atterrissage difficile, nous recommandons
de synchroniser une fois la position neutre conformément aux remarques dans le mode d’emploi
du QuadroCopter.
Après le raccordement de la batterie, le modèle réduit doit alors être parfaitement immobile et
à l’horizontale durant cette synchronisation (initialisation des capteurs).
Si les capteurs n’affichent pas des valeurs constantes en l’espace de 20 secondes, il n’est pas
possible de garantir un vol calme sans dérive.
Si l’initialisation dure plus de 20 secondes, il est recommandé de débrancher encore une fois la
batterie puis d’attendre 10 secondes. Raccordez de nouveau la batterie.
Durant l’initialisation, le QuadroCopter doit se trouver sur un support horizontal, il est
interdit de le déplacer !
Vol avec le régulateur de vol « QC 09 »
Après le branchement de la batterie de propulsion et l’autotest du régulateur de vol, votre
QuadroCopter est prêt à décoller. Il est recommandé d’effectuer la première tentative de vol avec
capteurs activés (la fonction « mode Agility » est désactivée) et de s’habituer aux caractéristiques
de vol du nouveau régulateur de vol. Après la phase d’entraînement, activez la fonction « mode
Agility » à une altitude suffisamment élevée sur l’émetteur de la télécommande. L’efficacité des
capteurs est maintenant limitée. Votre QuadroCopter réagit maintenant comme un hélicoptère
et réagit donc nettement plus rapidement aux commandes. Lorsque vous ne maîtrisez pas
encore à 100 % les principales caractéristiques de vol en « mode Agility », vous pouvez à tout
moment réactiver les capteurs en vol. Le QuadroCopter offre alors à nouveau les caractéristiques
de vol et de pilotage habituelles.
En « mode Agility », vous pouvez réaliser des figures acrobatiques simples (loopings et
tonneaux) avec le QuadroCopter. Ces figures acrobatiques doivent toutefois être réalisées à une
altitude suffisante.
Le « mode Agility » peut uniquement être activé en mode Sport. En mode Sport, il est
également possible d’activer le « mode Agility » en cas d’utilisation de vos propres
paramètres utilisateur.
Pour les premières tentatives de vol en « mode Agility », nous recommandons aux
utilisateurs de télécommandes d’ordinateur de mélanger de l’exponentiel aux fonctions
de pilotage Lacet, Tangage et Roulis afin de pouvoir piloter avec une plus grande
sensibilité en position médiane des éléments de commande de l’émetteur.
Veillez à ce que la batterie soit solidement fixée sur votre QuadroCopter afin d’éviter
qu’elle ne se desserre ou glisse.
Contrairement à d’autres hélicoptères conçus pour les vols acrobatiques, vous ne devez pas
réduire les gaz lorsque le QuadroCopter est à l’envers, les déplacements en vol se commandent
exclusivement en modifiant la vitesse de rotation des rotors.
Si les gaz sont trop faibles, le régulateur de vol ne peut plus modifier les vitesses de rotation
disponibles ou requises par les différents rotors pour les figures acrobatiques. Le QuadroCopter
ne peut alors plus être contrôlé.
Page 9
Indicateurs à DEL
Lorsque le régulateur de vol détecte des dysfonctionnements durant l’autotest, durant le
démarrage des moteurs ou en cours de vol, ces dysfonctionnements sont signalisés au moyen
des indicateurs à DEL « LD1 » et « LD2 ». Vous pouvez rencontrer les codes DEL suivants :
Mode Bootloader
En mode Bootloader, la DEL verte « LD1 » doit toujours clignoter à une fréquence d’env. 1 Hz.
Durant la communication avec l’ordinateur, la DEL rouge « LD2 » clignote rapidement, à vitesses
variables.
Mode normal :
Initialisation DEL rouge et verte allumées en permanence
Initialisation OK, avant le décollage DEL verte allumée, DEL rouge allumée
Moteur démarré, gaz sur bas DEL rouge allumée, DEL verte clignote lentement
(2 Hz)
Vol DEL rouge allumée, DEL verte allumée
Atterrissage d’urgence Les DEL rouge et verte clignotent lentement à la
même vitesse (2 Hz)
Compensation des positions neutres DEL rouge éteinte, DEL verte clignote rapidement
(8 Hz)
Panne radio Les DEL rouge et verte clignotent lentement en
alternance (2 Hz)
Gaz pas en position basse Les DEL rouge et verte clignotent rapidement en
alternance (10 Hz)
Batterie faible, niveaux 1 et 2 DEL verte allumée, DEL rouge clignote lentement
(8 Hz)
Erreur moteur DEL verte éteinte, DEL rouge clignote brièvement
2 fois de suite, pause courte
Lorsque vous utilisez une télécommande à microprocesseur à fonction Failsafe
intégrée pour le pilotage du QuadroCopter, vous devez désactiver la fonction Failsafe.
Lorsqu’il n’est pas possible de complètement désactiver la fonction Failsafe, le
régulateur de vol reconnaît le signal Failsafe comme un signal de commande.
Contrairement aux informations dans le mode d’emploi, le régulateur de vol risquerait
donc alors de ne pas initier la fonction d’atterrissage d’urgence. Le générateur de
signaux et les indicateurs à DEL risqueraient également de ne pas réagir de la manière
décrite dans les modes d’emploi.
En tel cas, nous recommandons de définir une position des gaz adéquate permettant
de réaliser un atterrissage « en douceur » à l’aide de la commande des gaz.
Lorsque la tension finale de charge de la batterie est atteinte, la DEL rouge « LD2 »
clignote lentement. Le générateur de signaux émet alors simultanément des tonalités
espacées. Atterrissez immédiatement dès que vous entendez ces signaux.
Si vous ignorez ces signaux, la batterie se déchargera encore davantage. Le générateur
de signaux commence alors à émettre des tonalités d’avertissement rapides.
Si vous continuer d’ignorer les signaux d’alarme, le régulateur de vol éteint les moteurs
à partir d’une certaine tension de la batterie. Un crash du QuadroCopter est alors
inévitable. Perte de la garantie ou garantie légale !
Affectation des interfaces du raccord X5
Broche 1 : Vbat
Broche 2 : Vbat
Broche 3 : canal servo 4
Broche 4 : canal servo 3
Broche 5 : canal servo 2
Broche 6 : canal servo 1
Broche 7 : canal servo 5
Broche 8 : canal servo 6
Broche 9 : canal servo 7
Broche 10 : canal servo 8
Broche 11 : pas encore utilisée
Broche 12 : pas encore utilisée
Broche 13 : pas encore utilisée
Broche 14 : pas encore utilisée
Broche 15 : pas encore utilisée
Broche 16 : état du générateur de signaux 1 (signaux d’état, voir « Signaux sonores du
générateur de signaux »)
Élimination
À la fin de sa durée de vie, éliminez le produit conformément aux dispositions légales
en vigueur.
Caractéristiques techniques
Capteurs .............................................. technologie MEMS
Tension de service .............................. 12 V / CC (3S Lipo)
Tension de service interne .................. 5 V / CC (via USB)
Dimensions (L x l) ................................ env. 100 x 30 mm
Signaux acoustiques du générateur de signaux
Lorsque le régulateur de vol détecte des dysfonctionnements durant l’autotest, le démarrage des
moteurs ou en vol, le générateur de signaux signalise ces dysfonctionnements au moyen de
signaux sonores. Vous pouvez rencontrer les codes suivants :
Erreur du gyroscope durant
le réglage du zéro du roulis 1 bip court, puis pause d’1 s
Erreur du gyroscope durant
le réglage du zéro du tangage 2 bips courts, puis pause d’1 s
Erreur du gyroscope durant
le réglage du zéro du lacet 3 bips courts, puis pause d’1 s
Erreur moteur avant 1 bip long, 1 bip court, puis pause d’1 s (à gauche à
l’avant avec la configuration X)
Erreur moteur arrière 1 bip long, 2 bips courts, puis pause d’1 s (à droite à
l’arrière avec la configuration X)
Erreur moteur à droite 1 bip long, 3 bips courts, puis pause d’1 s (à droite à
l’avant avec la configuration X)
Erreur moteur à gauche 1 bip long, 4 bips courts, puis pause d’1 s (à gauche à
l’arrière avec la configuration X)
Atterrissage d’urgence Tonalité permanente
Sous-tension niveau 1 1 Hz (séquence lente)
Sous-tension niveau 2 2,5 Hz (séquence plus rapide)
Signalisation prêt au vol 1 bip pendant 500 ms (tonalité courte)
Signalisation réglage du zéro 1 bip pendant 500 ms (tonalité courte)
Signalisation démarrage moteur 1 bip pendant 500 ms (tonalité courte)
Signalisation arrêt moteur 1 bip pendant 500 ms (tonalité courte)
Pour les signaux sonores du générateur de signaux, observez également toutes les
indications fournies dans la rubrique « Indicateurs à DEL » du présent mode d’emploi.
Ce mode d'emploi est une publication de la société Conrad Electronic SE, Klaus-Conrad-Str. 1,
D-92240 Hirschau (www.conrad.com).
Tous droits réservés, y compris de traduction. Toute reproduction, quelle qu'elle soit (p. ex. photocopie,
microfilm, saisie dans des installations de traitement de données) nécessite une autorisation écrite de
l'éditeur. Il est interdit de le réimprimer, même par extraits.
Ce mode d'emploi correspond au niveau technique du moment de la mise sous presse. Sous réserve
de modifications techniques et de l'équipement.
© Copyright 2012 by Conrad Electronic SE.
Page 10

Aansluitings- en signaalelementen
Flight Control „QC 09“
Gebruiksaanwijzing Versie 12/12
Bestelnr. 20 98 40
Voorgeschreven gebruik
Flight Control „QC 09“ kan als vervang- of tuningonderdeel voor de modellen „Quadrocopter
450“ (Conradbestelnr. 208000) en „Quadrocopter 650“ (Conradbestelnr. 209300) worden
gebruikt.
In de modellen „QuadroCopter 450“ met bestelnr. 239880 en de „QuadroCopter 650“ met
bestelnr. 275100 is de Flight Control „QC 09“ reeds af fabriek ingebouwd.
De belangrijkste verschillen met het in de eerstgenoemde modellen ingebouwde Control- &
Sensorboard „QC 02“ (Flight Control) zijn de hoogwaardigere sensoren in MEMS-technologie,
een „Agility Mode“ en een verbeterde besturings- en regelsoftware. Ook kan vanaf firmware
7.xx de QuadroCopter zowel in de af fabriek ingestelde „+ configuratie“ (een landingsgesteld
vliegt voouit) als in de „X-configuratie“ (twee landingsgestellen vliegen voouit) worden
gevlogen.
Deze veranderingen resulteren samen in merkbaar betere vliegeigenschappen en maken in
de „Agility Mode“ ook acrobatisch vliegen eenvoudig. Bovendien werd de layout van de platine
volledig nieuw opgemaakt om voor een toekomstige bijkomende module overeenkomstige
interfaces en aansluitmogelijkheden te creëren. In de plaats van een penconnector voor de
modusinstelling werden DIP-schakelaars verbouwd.
Flight Control „QC 09“ kan als vervang- of tuningonderdeel in elke QuadroCopter vanaf
verkoopdatum 04/ 2010 worden gebruikt.
Dit product voldoet aan de voorwaarden van de nationale en Europese wetgeving. Alle
vermelde bedrijfs- en productnamen zijn handelsmerken van de respectievelijke eigenaren.
Alle rechten voorbehouden.
Leveringsomvang
• Flight Control „QC 09“
• Vlakbandkabel naar de motordriverboards
• Gebruiksaanwijzing
Veiligheidsvoorschriften
Bij schade veroorzaakt door het niet opvolgen van de gebruiksaanwijzing, vervalt
het recht op garantie! Voor vervolgschade die hieruit ontstaat, zijn wij niet
aansprakelijk!
Voor materiële of persoonlijke schade, die door ondeskundig gebruik of niet
inachtname van de veiligheidsaanwijzingen veroorzaakt worden zijn wij niet
aansprakelijk. In zulke gevallen vervalt de garantie.
• Om veiligheids- en keuringsredenen (CE) is het eigenhandig ombouwen en/of
wijzigen van het product niet toegestaan.
• Alle veiligheidsvoorschriften uit de gebruiksaanwijzingen van de Quadrocopter
moeten eveneens in acht worden genomen.
• Het product is geen speelgoed en is niet geschikt voor kinderen.
• U mag het verpakkingsmateriaal niet zomaar laten rondslingeren. Dit is gevaarlijk
speelgoed voor kinderen.
• Behandel het product voorzichtig. Door stoten, schokken of een val - zelfs van
geringe hoogte - kan het beschadigd raken.
1 „X5“: interface naar bijkomende boards
2 „X2“: interface naar de motordrivers
3 „SW1“: DIP-schakelaar 1-6 voor mode-omschakeling
4 „X6“ / „X7“: geen functie
5 „X3“: geen functie
6 „X10“: seriële interface voor de programmering en statusmeldingsuitgave
7 „X9“: twee seriële interfaces voor externe stuurbevelen (actuele informatie hierover vindt u
in het downloadcenter op www.conrad.com)
8 „X4“: geen functie
9 „X11“: geen functie
10 signaalgever
11 „LD1“: groene LED
12 „LD2“: rode LED
13 „X1“: interface naar de motordrivers
14 „X8“: sommensignaalingang
Functie „Agility Mode“
In de Flight Control „QC 09“ zijn hoogwaardige MEMS-sensoren voor de stabilisering van de
vliegtoestand ingebouwd. Daardoor worden relatief eenvoudig te beheersen vliegeigenschappen
bereikt, gelijkaardig aan een Koax-helikopter. De beweeglijkheid van de QuadroCopter wordt
door deze sensoren echter beperkt.
Als de functie „Agility Mode“ is geactiveerd, worden de sensoren in de Flight Control in hun
werking beperkt. De Quadrocopter is in deze modus rond alle assen duidelijk beweeglijker
stuurbaar. De vliegeigenschappen lijken nu meer op deze van een helikopter. Bovendien is
eenvoudig acrobatisch vliegen (looping, rollen) mogelijk.
De vliegeigenschappen bij een geactiveerde „Agility Mode“-functie zijn niet meer
geschikt voor beginners. Indien u niet over voldoende vliegervaring met QuadroCopters en/of helikopters beschikt, raden wij u aan om de eerste vluchten met een
geactiveerde „Agility Mode“ voorzichtig uit te voeren.
De „Agility Mode“ kan vanaf firmware versie 7.xx uitsluitend nog in de sportmodus
worden geactiveerd. Het inschakelen van de „Agility Mode“ wordt een tweevoudig, het
uitschakelen door een enkelvoudig geluidssignaal akoestisch kenbaar gemaakt.
Montage van de Flight Control
• Ontkoppel eerst de stroomtoevoer van de QuadroCopter en ontkoppel de vliegaccu.
• Verwijder de acht schroeven van het bovenste afdekkader van het centrale kader.
• Ontkoppel voorzichtig de zijdelingse haken van de motortraversen en hef het bovenste
afdekkader op.
• Hef de oude Flight Control (oude Control- & Sensorboard) uit het centrale kader.
• Verwijder voorzichtig de vlakbandkabel naar de motordriverplatines en de stekker voor het
somsignaal van de oude Flight Control.
• Verbind de vlakbandkabel van de motordriverplatines met de nieuwe Flight Control.
• Verbind de stekker voor het sommensignaal met de nieuwe Flight Control. Let hierbij op de
correcte verpoling (zie bovenstaande afbeelding).
• Steek de nieuwe Flight Control in het centrale kader. Let op dat de platine in de daartoe
voorziene houders van het centrale kader zit. De Flight Control moet indien mogelijk in het
midden van het centrale kader worden gemonteerd vanwege de aanwezige sensoren die zich
daar bevinden.
• Let bij het inbouwen van de Flight Control op dat de DIP-schakelaar naar de voorste motor
(rode draad in het landingsbeen) en de stekker X5 naar de rechter motor wijzen.
• Plaats het bovenste kader in het centarle kader en schroef dit opnieuw vast.
Vergewis u er na de montage van de platines en voor het verbinden van de accu van
dat alle steekverbindingen zich op hun plaats bevinden en er geen kortsluiting kan
ontstaan. Bij kortsluitingen bestaat het gevaar dat de afzonderlijke module schade
oploopt. Verlies van garantie/aansprakelijkheid!
Page 11
DIP-schakelaar
Met de DIP-schakelaars worden de gewenste modi ingesteld. Schakel hiervoor de betreffende
schakelaar in de stand „ON“ of „OFF“. De volgende schakelposities zijn mogelijk:
Schakelaar „Flight Control QC 09“
1 „off“ „Beginner Mode“
1 „on“ „Sport Mode“
2 „off“ „Standard Mode“
2 „on“ „User Mode“
3 „on“ Bootloader Mode
4 „on“ RC-configuratiemodus
5 „off“ vliegmodus in „+ configuratie“
5 „on“ vliegmodus in „X configuratie“
6 geen functie
Opmerking m.b.t. DIP-schakelaar 1:
Naargelang de schakelaarpositie van DIP-schakelaar 1 (geselecteerde vliegmodus „Beginner“
of „Sport“) kunt u de QuadroCopter in de standaardinstellingen van de firmware (fabrieksinstellingen
van de parameters, DIP-schakelaar 2 staat op „off“) of in de User Mode met eigen, gewijzigde
parameters (DIP-schakelaar 2 staat op „on“) vliegen.
Wijzigingen van de parameters in de gebruikersmodus kunnen met de optioneel verkrijgbare
configuratiekit (niet inbegrepen) worden uitgevoerd.
Opmerking m.b.t. DIP-schakelaar 2:
Als met de Quadrocopter-configuratiekit in de User Mode parameters worden veranderd, worden
deze in de parameterset „User“ opgeslagen.
Als parameters worden veranderd en u bevindt zich in de parameterset „Beginner Mode“ (of
„Sport Mode“), worden deze wijzigingen overgenomen en ook in de parameterset „User“
opgeslagen. De oude parameterset van „User Mode“ wordt daarmee overschreden.
Als de DIP-schakelaar 2 niet in de „User-modus“ is gezet (schakelaar 2 niet op „ON“), worden
na een reset (vb. na een accuwissel) opnieuw de Standaard-Beginner (of Sport-) parameters
geladen.
Opmerking m.b.t. DIP-schakelaar 5:
Als de DIP-schakelaar 5 in de positie „off“ staat, vliegt de QuadroCopter in de zogenaamde „+“
configuratie. Dit betekent dat de arm (het landingsgestel) met de rode richtingaanwijzer
„vooraan“ is. Deze configuratie is de fabrieksinstelling en ook in de gebruiksaanwijzing van de
QuadroCopter in het hoofdstuk „Informatie over de eerste start“, subhoofdstuk d) tot g)
opgenomen.
Als de DIP-schakelaar 5 zich in de stand „on“ bevindt, is de zogenaamde „X“-configuratie
ingesteld. Dit betekent dat de QuadroCopter met twee landingsgestellen vooruit vliegt. Hierbij is
het belangrijk dat de af fabriek in de arm gemonteerde richtingsaanwijzers bij het aanleren van
de afstandsbediening verder „Vliegrichting voor“ betekent. „Voor“ bevindt zich nu alleen tussen
het voorste, linkse landingsgestel met richtingsaanwijzers en het landingsgestel rechts daarvan.
Voor een betere herkenning van de vliegtoestand raden wij aan om een tweede richtingsaanwijzer
(als vervangonderdeel te bestellen) te monteren.
Aanleren van de kanalen van de zender
De kanalen van de zender moeten aan de nieuwe Flight Control worden aangeleerd. De LED
„LD2“ (rode LED) toont u het in te stellen kanaal. De groene LED „LD1“ duidt aan, of het aanleren
succesvol was. Voor het aanleren van de afstandsbediening schakelt u de DIP-schakelaar 4 op
de stand „ON“ en ga in de volgende stappen tewerk zoals in de gebruiksaanwijzing van uw
QuadroCopter onder „Aanleren van de kanalen van de zender“ wordt getoond.
Om kanaal 5 aan te leren, moet u bovendien de voorschriften van de gebruiksaanwijzing van uw
QuadroCopter een schakelaar op de afstandsbedieningszender tweemaal worden ingedrukt (uit
- aan - uit). Bij het aanleren van kanaal 5 betekent de laatste positie van de aangeleerde
schakelaar dat in deze positie de functie „Agility Mode“ is gedeactiveerd.
De „Agility Mode“ kan vanaf firmware 7.xx uitsluitend nog in de sportmodus worden
geactiveerd.
Onafhankelijk van welke afstandsbedieningsmodus (modus 1 - 4, zie ook de gebruiksaanwijzing
van uw QuadroCopter) u wilt aanleren, moet u deze volgorde van kanalen en daarom de signalen
van de rode LED „LD2“ in acht nemen.
Gas/Throttle LD2 knippert (kort bij het initialiseren) 1x
Gier LD2 knippert 2x
Nick LD2 knippert 3x
Roll LD2 knippert 4x
Agility Mode LD2 knippert 5x
Als na het aanleren van de roll-functie niet binnen de vijf seconden een schakelaarkanaal
voor de „Agility Mode“ wordt aangeleerd, wordt de RC-configuratie automatisch
beëindigd. In dit geval licht de groene LED „LD1“ continu op, de „Agility Mode“ is echter
niet beschikbaar. Als u de functie „Agility Mode“ wilt aanleren, moet u het aanleren
opnieuw starten.
De schakelaar op de afstandsbedieningszender moet op een willekeurig
ontvangerkanaal werken, maar dit mag niet kanaal 1 - 4 zijn of door de mixer worden
beïnvloed.
Controleer bij computerafstandsbedieningszenders de werking van de schakelaar met
een servo (vb. aan een ontvanger aansluiten) of een geschikte indicator van uw
zender.
Op het schakelkanaal voor de „Agility Mode“ mogen aan de kant van de zender geen
wegbegrenzing, Dual Rate, expotentionaal of andere mixer worden geprogrammeerd.
Belangrijk is bij het gebruik van de sommensignaalomvormer of de modules „QC 06“,
resp. „QC 08“ dat de kanalen in stijgende volgorde en zonder uitvallen van een kanaal
aangesloten zijn (kanaal 1 – 4 = basisfuncties; kanaal 5 = Agility Mode).
De aangeleerde kanalen kunnen tijdens het aanleren via seriële statusmeldingen in de
QuadroCopter-configuratiekit of in een andere seriële terminal worden gecontroleerd.
Als kanaal 5 niet wordt aangeleerd of een afstandsbedieningszender met slechts 4
kanalen wordt gebruikt, is de „Agility Mode“ functie continu gedeactiveerd.
Afstelling van de neutrale positie
De afstelling van de neutrale stand wordt vanaf firmware V7.xx permanent in de QuadroCopter
opgeslagen. Daarmee moet deze afstelling niet meer worden uitgevoerd telkens u opnieuw start.
Na het vervangen van de Flight Control of een hardere landing raden wij aan om de neutrale
stand eenmalig af te stellen in overeenstemming met de voorschriften in de gebruiksaanwijzing
van de QuadroCopter.
Na aansluiting van de accu moet het model bij deze afstelling (initialisering van de sensoren)
absoluut rustig en horizontaal staan.
Als er binnen de 20 seconden geen constante sensorwaarde kan worden bepaald, kan een
rustige, driftvrije vlucht niet worden gegarandeerd.
Duurt de initialisering langer dan 20 seconden, dan moet u de accu nogmaals ontkoppelen en
10 seconden wachten. Sluit de vliegaccu nogmaals aan.
De QuadroCopter moet tijdens de initialisering op een horizontale ondergrond staan
en mag niet worden bewogen!
Vliegen met de Flight Control „QC 09“
Na het aansteken van de vliegaccu en de zelftest van de Flight Control is uw QuadroCopter klaar
voor de start. De eerste vliegpoging moet u moet ingeschakelde sensoren uitvoeren (functie
„Agility Mode“ is gedeactiveerd) en aan de vliegeigenschappen van de nieuwe Flight Control
gewoon raken. Na een succesvolle gewenning activeert u op voldoende hoogte boven de grond
de functie „Agility Mode“ op uw afstandsbedieningszender. De sensoren zijn nu in hun werking
beperkt. Uw QuadroCopter reageert nu gelijkaardig aan een helikopter en de stuurreacties zijn
duidelijk beweeglijker. Als overheersende vliegeigenschappen in de „Agility Mode“ door u nog
niet volledig beheersd worden, kunt u op elk moment tijdens het vliegen de sensoren opnieuw
inschakelen. De QuadroCopter heeft dan opnieuw de gewoone vlieg- en stuureigenschappen.
In de „Agility Mode“ kunnen met de QuadroCopter eenvoudige acrobatische vluchten (loopings
en rollen) met een Quadrocopter worden uitgevoerd. Het uitvoeren van deze vliegfiguren moet
echter op voldoende vlieghoogte worden uitgevoerd.
De „Agility Mode“ is nu in de sportmodus mogelijk. Ook bij het gebruik van userparameters in de sportmodus kan de „Agility Mode“ worden ingeschakeld.
Voor de eerste vliegpogingen in de „Agility Mode“ raden wij het gebruikers van
computerafstandsbedieningen aan, een beetje expotentionaal op de stuurfuncties
gier, nick en roll te mengen om in de middelste stand van het zenderstuuraggregaat
fijner te kunnen sturen.
Let ook op een goede accubevestiging aan uw QuadroCopter die voorkomt dat de accu
losraakt of verschuift.
In tegenstelling tot acrobatische helikopters mag u bij een looping of een rol geen gas
terugnemen in de rugstand van de QuadroCopter, aangezien de vliegbewegingen uitsluitend
door toerentalwijzigingen van de rotoren worden opgewekt.
Als het gas te laag is, zin de mogelijke of nodige toerentalwijzigingen van de afzonderlijke rotoren
door de Flight Control voor acrobatische figuren niet meer uitvoerbaar. De QuadroCopter wordt
in dit geval oncontroleerbaar.
Page 12

LED aanduiding
Als tijdens de zelftest, het starten van de motoren of tijdens het vliegen defecten van de Flight
Control worden vastgesteld, worden deze via LED-indicatoren door „LD1“ en „LD2“ optisch
gemeld. De volgende LED-codes zijn mogelijk:
Normale werking:
Initialisering rood en groen continu aan
Initialisering OK, niet gestart groen aan, rood uit
Motor gestart, gas op Low rood aan, groen knippert langzaam (2 Hz)
Vliegen rood aan, groen aan
Noodlanding rood en groen knipperen langzaam op hetzelfde tempo
(2 Hz)
Afstemmen neutrale toestand rood uit, groen knippert snel (8 Hz)
Afstandsbediening uitgevallen rood en groen knipperen langzaam in tegengesteld
tempo (2 Hz)
Gas niet volledig in de onderste stand rood en groen knipperen snel in tegengesteld tempo
(10 Hz)
Low-Bat level 1 en 2 groen aan, rood knippert langzaam (8 Hz)
Motorfout groen uit, rood knippert 2x kort, korte pauze
Als u een computerafstandsbediening met geïntegreerde Failsafe-functie gebruikt om
de QuadroCopter te besturen, dan moet de Failsafe worden gedeactiveerd. Als een
volledige deactivering van de Failsafe niet mogelijk is, wordt het Failsafe-signaal door
de Flight Control als stuursignaal herkend.
Door deze omstandigheid kan de Flight Control in tegenstelling tot de informatie in de
gebruiksaanwijzing geen noodlanding inleiden. Ook reageren signaalgevers en LEDindicatoren niet zoals in de gebruiksaanwijzingen getoond.
In dit geval raden wij aan om bij Failsafe-gebruik een geschikte gaspositie te proberen
te bepalen die een „zachte“ landing door overeenkomstig gassturing inleidt.
Als de laadeindspanning van de accu niet wordt bereikt, begint de rode LED „LD2“ in
langzaam tempo te knipperen. Tegelijk begint de signaalgever langzaam
geluidssignalen weer te geven. Land onmiddellijk nadat u deze signalen waarneemt.
Negeer deze signalen, zo gebeurt een verdere ontlading van de accu. De signaalgever
begint dan in snel tempo waarschuwingssignalen weer te geven.
Als de alarmsignalen verder worden genegeerd, schakelt de Flight Control vanaf een
bepaalde spanningswaarde van de accu de motoren uit. De QuadroCopter stort dan
onvermijdelijk neer. Verlies van garantie/aansprakelijkheid!
Interfacebezetting aansluiting X5
Pin 1: Vbat
Pin 2: Vbat
Pin 3: servokanaal 4
Pin 4: servokanaal 3
Pin 5: servokanaal 2
Pin 6: servokanaal 1
Pin 7: servokanaal 5
Pin 8: servokanaal 6
Pin 9: servokanaal 7
Pin 10: servokanaal 8
Pin 11: nog niet gebruikt
Pin 12: nog niet gebruikt
Pin 13: nog niet gebruikt
Pin 14: nog niet gebruikt
Pin 15: nog niet gebruikt
Pin 16: signaalgeverstatus 1 (statussignalen, zie „Akoestische meldingen van de signaalgever“)
Afvoer
Als het product niet meer werkt, moet u het volgens de geldende wettelijke bepalingen
voor afvalverwerking inleveren.
Technische gegevens
Sensoren ............................................. MEMS-technologie
Voedingsspanning ............................... 12 V/DC (3S Lipo)
Bedrijfsspanning intern ........................ 5 V/DC (via USB)
Afmetingen (L xB) ................................ ca. 100 x 30 mm
Akoestische meldingen van de signaalgever
Als tijdens de zelftest, het starten van de motoren of tijdens het vliegen defecten van de Flight
Control worden vastgesteld, worden deze via de signaalgever akoestisch gemeld. De volgende
codes zijn mogelijk:
Gyrofout bij nulmeting roll 1 x korte piep, dan 1 s pauze
Gyrofout bij nulmeting nick 2 x korte piep, dan 1 s pauze
Gyrofout bij nulmeting gier 3 x korte piep, dan 1 s pauze
Motorfout vooraan 1 x lange piep, 1 x kort, dan 1 s pauze (in de X-configuratie
Motorfout achteraan 1 x lange piep, 2 x kort, dan 1 s pauze (in de X-configuratie
Motorfout rechts 1 x lange piep, 3 x kort, dan 1 s pauze (in de X-configuratie
Motorfout links 1 x lange piep, 4 x kort, dan 1 s pauze (in de X-configuratie
Noodlanding continu toon
Onderspanning level 1 1 Hz (langzame tonen)
Onderspanning level 2 2,5 Hz (snellere tonen)
Signalering vlieggereedheid 1 x piep 500 ms lang (korte toon)
Signalering nulmeting 1 x piep 500 ms lang (korte toon)
Signalering motorstart 1 x piep 500 ms lang (korte toon)
Signalering motorstop 1 x piep 500 ms lang (korte toon)
Let bij de akoestische meldingen van de signaalgever ook op alle voorschriften, die in
deze gebruiksaanwijzing onder het punt „LED-aanduidingen“ worden beschreven.
linksvoor)
rechtsachter)
rechtsvoor)
linksachter)
Bootloader-werking
Bij Bootloader-werking moet de groene LED „LD1“ continu met ca. 1 Hz knipperen. De rode LED
„LD2“ knippert tijdens de communicatie met de computer in snel, verschillend tempo.
Deze gebruiksaanwijzing is een publicatie van de firma Conrad Electronic SE, Klaus-Conrad-Str. 1,
D-92240 Hirschau (www.conrad.com).
Alle rechten, vertaling inbegrepen, voorbehouden. Reproducties van welke aard dan ook, bijvoorbeeld
fotokopie, microverfilming of de registratie in elektronische gegevensverwerkingsapparatuur, vereisen de schriftelijke toestemming van de uitgever. Nadruk, ook van uittreksels, verboden.
Deze gebruiksaanwijzing voldoet aan de technische stand bij het in druk bezorgen. Wijziging van
techniek en uitrusting voorbehouden.
© Copyright 2012 by Conrad Electronic SE.
 Loading...
Loading...