


Combiboard „QC08“
Best.-Nr.: 20 89 44
Version 06/11

Inhaltsverzeichnis
1. Einführung ....................................................................................................................3
2. Bestimmungsgemäße Verwendung ............................................................................. 4
3. Lieferumfang ................................................................................................................. 4
4. Symbol-Erklärung ......................................................................................................... 4
5. Produktbeschreibung .................................................................................................... 5
6. Sicherheitshinweise ...................................................................................................... 6
a) Allgemein ............................................................................................................... 6
b) Vor der Inbetriebnahme ......................................................................................... 7
c) Während des Betriebs ........................................................................................... 7
7. Batterie- und Akku-Hinweise......................................................................................... 8
8. Anschlusskontakte und Anzeigen ............................................................................... 10
9. Anschlussmöglichkeiten ............................................................................................. 11
a) Stromversorgung ................................................................................................. 11
b) Empfängeranschluss ........................................................................................... 12
c) Summensignal-Ausgang ..................................................................................... 13
d) LED-Statusanzeige .............................................................................................. 14
e) Interface-Anschluss ............................................................................................. 15
f) Inbetriebnahme des Combiboards ...................................................................... 15
g) Servoanschluss ................................................................................................... 16
10. Funktionsweise Light & Sound ................................................................................... 17
a) Grundsätzliche Informationen .............................................................................. 17
b) Auswahl des Lichtmodus ..................................................................................... 19
c) Auswahl des RC-Eingangs .................................................................................. 20
d) Anschluss der LED-Streifen/LEDs ....................................................................... 21
e) Summer-Konfiguration ......................................................................................... 23
11. PC-Anschluss ............................................................................................................. 24
12. Wartung und Pflege .................................................................................................... 25
13. Entsorgung ................................................................................................................. 25
a) Allgemein ............................................................................................................. 25
b) Batterien und Akkus ............................................................................................. 25
14. Technische Daten ....................................................................................................... 26
Seite
2

1. Einführung
Sehr geehrte Kundin, sehr geehrter Kunde,
wir bedanken uns für den Kauf dieses Produkts.
Dieses Produkt erfüllt die gesetzlichen, nationalen und europäischen Anforderungen.
Um diesen Zustand zu erhalten und einen gefahrlosen Betrieb sicherzustellen, müssen Sie als
Anwender diese Bedienungsanleitung beachten!
Diese Bedienungsanleitung gehört zu diesem Produkt. Sie enthält wichtige
Hinweise zur Inbetriebnahme und Handhabung. Achten Sie hierauf, auch wenn
Sie dieses Produkt an Dritte weitergeben.
Heben Sie deshalb diese Bedienungsanleitung zum Nachlesen auf!
Alle enthaltenen Firmennamen und Produktbezeichnungen sind Warenzeichen der jeweiligen
Inhaber. Alle Rechte vorbehalten.
Bei technischen Fragen wenden Sie sich bitte an:
Tel.: 0180/5 31 21 11
Fax: 0180/5 31 21 10
E-Mail: Bitte verwenden Sie unser Formular im Internet: www.conrad.de, unter der Rubrik
„Kontakt“.
Mo. bis Fr. 8.00-18.00 Uhr
www.conrad.at
www.business.conrad.at
Tel.: 0848/80 12 88
Fax: 0848/80 12 89
E-Mail: support@conrad.ch
Mo. bis Fr. 8.00-12.00, 13.00-17.00 Uhr
3

2. Bestimmungsgemäße Verwendung
Das Combiboard „QC08“ ist ausschließlich für den privaten Einsatz im Modellbaubereich und
für die damit verbundenen Betriebszeiten ausgelegt.
Das Produkt darf nicht feucht oder nass werden. Die Elektronik ist für einen Betrieb bei einer
Umgebungstemperatur von 0°C bis +40°C ausgelegt.
Für einen anderen Einsatz ist dieses Produkt nicht geeignet. Eine davon abweichende Verwendung kann zur Beschädigung des Produktes mit den damit verbundenen Gefahren wie z.B.
Kurzschluss, Brand, elektrischer Schlag etc. führen. Die Sicherheitshinweise sind unbedingt zu
befolgen!
Beachten Sie alle Sicherheitshinweise dieser Bedienungsanleitung. Diese enthalten
wichtige Informationen zum Umgang mit dem Produkt.
Sie allein sind für den gefahrlosen Betrieb eines Modells mit Summensignalwandler
verantwortlich!
3. Lieferumfang
• Combiboard „QC08“
• Empfänger-Anschlusskabel
• Interface-Folienkabel
• Bedienungsanleitung
4. Symbol-Erklärung
Das Symbol mit dem Ausrufezeichen weist Sie auf besondere Gefahren bei Handhabung, Betrieb oder Bedienung hin.
Das „Pfeil“-Symbol steht für spezielle Tipps und Bedienhinweise.
4

5. Produktbeschreibung
Die Elektronik ist nicht gegen Nässe und andere Umwelteinflüsse geschützt und darf
nur im Modellinneren verbaut werden. Die Eingänge und Ausgänge sind mittels handelsüblicher Steckkontakte ausgeführt bzw. über die mitgelieferten Kabel anzuschließen.
Beim Combiboard „QC08“ handelt es sich um eine betriebsbereite Elektronik-Platine, die in
einem Modell verschiedene Funktionen ermöglicht.
1. Verwendung eines handelsüblichen RC-Empfängers für summensignalgesteuerte
Modelle, wie z.B. dem QuadroCopter.
Bei einem handelsüblichen Empfänger wird für jedes Servo ein eigenes Ansteuersignal erzeugt
und am jeweiligen Servo-Steckkontakt am Empfänger ausgegeben. Der Summensignalwandler des Combiboards fügt die einzelnen Servoimpulse wieder zusammen und gibt sie als serielles Summensignal aus. Zur Summensignalbildung können bis zu 8 Kanäle verarbeitet werden.
Das Combiboard kann direkt am LiPo-Flugakku (3s1p) angeschlossen werden und versorgt
dann den am Summensignalwandler angeschlossenen Empfänger mit einer Gleichspannung
von 5 V/DC.
2.Steuerung von Lichteffekten und Anzeigen.
• Anschluss von bis zu 8 LEDs oder LED-Streifen
• Ausgabe verschiedener Lichtmuster über die angeschlossenen LEDs bzw. LED-Streifen
• Ansteuerung der Lichtmuster durch die Kanäle 5 - 8
• Ausgabe von akustischen (Warn)-Signalen mittels eines Summers
3.Servoanschluss
Am Combiboard können bis zu 4 Servos (Kanal 5 – 8) angeschlossen werden, die dann direkt
von der Hauptsteuerung des „QuadroCopters 450“ gesteuert werden.
5

6. Sicherheitshinweise
Bei Schäden, die durch Nichtbeachtung dieser Bedienungsanleitung verursacht werden, erlischt die Gewährleistung/Garantie. Für Folgeschäden übernehmen wir keine Haftung!
Bei Sach- oder Personenschäden, die durch unsachgemäße Handhabung oder
Nichtbeachten der Sicherheitshinweise verursacht werden, übernehmen wir
keine Haftung! In solchen Fällen erlischt die Gewährleistung/Garantie.
Sehr geehrte Kundin, sehr geehrter Kunde,
diese Sicherheitshinweise dienen nicht nur zum Schutz des Produkts, sondern auch
zu Ihrer eigenen Sicherheit und der anderer Personen. Lesen Sie sich deshalb dieses Kapitel sehr aufmerksam durch, bevor Sie das Produkt in Betrieb nehmen!
a) Allgemein
Achtung, wichtiger Hinweis!
Beim Betrieb des Modells kann es zu Sach- und/oder Personenschäden kommen.
Achten Sie deshalb unbedingt darauf, dass Sie für den Betrieb des Modells ausreichend versichert sind, z.B. über eine Haftpflichtversicherung. Falls Sie bereits eine
Haftpflichtversicherung besitzen, so informieren Sie sich vor Inbetriebnahme des
Modells bei Ihrer Versicherung, ob der Betrieb des Modells mitversichert ist.
• Aus Sicherheits- und Zulassungsgründen (CE) ist das eigenmächtige Umbauen und/oder
Verändern des Produkts nicht gestattet.
• Das Produkt ist kein Spielzeug, es ist nicht für Kinder unter 14 Jahren geeignet.
• Das Produkt darf nicht feucht oder nass werden. Die Elektronik ist für einen Betrieb bei einer
Umgebungstemperatur von 0°C bis +40°C ausgelegt.
• Sollten Sie noch nicht über ausreichende Kenntnisse über den Umgang mit ferngesteuerten
Modellen und Fernsteueranlagen verfügen, so wenden Sie sich bitte an einen erfahrenen
Modellsportler oder an einen Modellbau-Club.
• Lassen Sie das Verpackungsmaterial nicht achtlos liegen, dieses könnte für Kinder zu einem
gefährlichen Spielzeug werden.
• Sollten sich Fragen ergeben, die nicht mit Hilfe der Bedienungsanleitung abgeklärt werden
können, so setzen Sie sich bitte mit uns (Kontaktinformationen siehe Kapitel 1) oder einem
anderen Fachmann in Verbindung.
6

b) Vor der Inbetriebnahme
• Stellen Sie sicher, dass innerhalb der Reichweite der Fernsteuerung keine weiteren Modelle
auf dem gleichen Fernsteuerkanal (Sendefrequenz) betrieben werden. Sie verlieren sonst die
Kontrolle über die ferngesteuerten Modelle! Verwenden Sie immer unterschiedliche Kanäle,
falls Sie zeitgleich zwei oder mehrere Modelle in unmittelbarer Nähe zueinander einsetzen
wollen.
• Schalten Sie immer zuerst den Sender ein und schließen unmittelbar danach den Antriebsakku des Modells an.
• Überprüfen Sie die Funktionssicherheit Ihres Modells und der Fernsteueranlage. Achten Sie
dabei auf sichtbare Beschädigungen, wie z.B. defekte Steckverbindungen, lockere Schrauben oder beschädigte Kabel.
• Der zum Betrieb erforderliche Antriebsakku sowie eventuell im Fernsteuersender eingesetzte
Akkus sind, entsprechend den Herstellerangaben aufzuladen.
• Achten Sie beim Anschluss von LEDs, Servos oder Anschlussleitungen auf einen sicheren
Kontakt. Lose oder wackelige Steckverbinder können Störungen hervorrufen, die zum Verlust
des Modells führen können.
c) Während des Betriebs
• Gehen Sie bei Betrieb des Produkts kein Risiko ein! Ihre eigene Sicherheit und die Ihres
Umfeldes hängen alleine von Ihrem verantwortungsbewussten Umgang mit dem Modell ab.
• Der unsachgemäße Betrieb kann schwerwiegende Personen- und Sachschäden verursachen! Achten Sie deshalb beim Flugbetrieb auf einen ausreichenden Sicherheitsabstand zu
Personen, Tieren und Gegenständen.
• Fliegen Sie mit Ihrem Modell nur dann, wenn Ihre Reaktionsfähigkeit uneingeschränkt gegeben ist. Müdigkeit, Alkohol- oder Medikamenten-Einfluss können zu Fehlreaktionen führen.
• Lassen Sie die Fernsteuerung (Sender) immer eingeschaltet, solange das Modell in Betrieb
ist. Schließen Sie nach der Landung immer zuerst den Antriebsakku vom Modell ab. Erst
danach darf die Fernsteuerung ausgeschaltet werden. Schalten Sie während des Betriebs
niemals den Sender aus.
• Setzen Sie Ihr Modell und die Fernsteueranlage nicht über längere Zeit der direkten Sonneneinstrahlung oder großer Hitze aus.
7

7. Batterie- und Akku-Hinweise
Obwohl der Umgang mit Batterien und Akkus im täglichen Leben heute eine Selbstverständlichkeit ist, bestehen zahlreiche Gefahren und Probleme. Speziell bei LiPo/LiIon-Akkus mit ihrem hohen Energieinhalt (im Vergleich zu herkömmlichen NiCdoder NiMH-Akkus) sind diverse Vorschriften unbedingt einzuhalten, da andernfalls
Explosions- und Brandgefahr besteht.
Beachten Sie deshalb unbedingt die nachfolgend genannten Informationen und
Sicherheitshinweise zum Umgang mit Batterien und Akkus.
• Batterien/Akkus gehören nicht in Kinderhände.
• Lassen Sie Batterien/Akkus nicht offen herumliegen, es besteht die Gefahr, dass diese von
Kindern oder Haustieren verschluckt werden. Suchen Sie in einem solchen Fall sofort einen
Arzt auf!
• Batterien/Akkus dürfen niemals kurzgeschlossen, zerlegt oder ins Feuer geworfen werden.
Es besteht Explosionsgefahr!
• Ausgelaufene oder beschädigte Batterien/Akkus können bei Berührung mit der Haut
Verätzungen verursachen, benutzen Sie deshalb in diesem Fall geeignete Schutzhandschuhe.
• Herkömmliche Batterien dürfen nicht aufgeladen werden. Es besteht Brand- und Explosionsgefahr!
Laden Sie ausschließlich dafür vorgesehene Akkus; verwenden Sie dazu geeignete Akkuladegeräte. Batterien (1,5 V) sind nur für den einmaligen Gebrauch vorgesehen und müssen
ordnungsgemäß entsorgt werden, wenn sie leer sind.
• Achten Sie beim Anschluss eines Akkupacks auf die richtige Polung (Plus/+ und Minus/- beachten). Bei Falschpolung werden nicht nur das Flugmodell und die Akkus beschädigt. Es
besteht zudem Brand- und Explosionsgefahr.
• Laden Sie den Antriebsakku niemals unmittelbar nach dem Gebrauch. Lassen Sie den Antriebsakku immer erst abkühlen (mind. 10 - 15 Minuten).
• Laden Sie nur intakte und unbeschädigte Akkus. Sollte die äußere Isolierung eines LiPoAkkus beschädigt sein bzw. der Akku verformt bzw. aufgebläht sein, darf er auf keinen Fall
aufgeladen werden. In diesem Fall besteht akute Brand- und Explosionsgefahr!
• Beschädigen Sie niemals die Außenhülle des Antriebsakkus, zerschneiden Sie die Folienumhüllung nicht und stechen Sie auch nicht mit scharfen Gegenständen in einen LiPo-Akku.
Es besteht Brand- und Explosionsgefahr!
8

• Entnehmen Sie den Antriebsakku zum Laden immer aus dem Modell und legen Sie ihn auf
einen feuerfesten Untergrund. Halten Sie Abstand zu brennbaren Gegenständen und decken
Sie den Akku oder das Ladegerät niemals ab.
• Laden Sie Akkus niemals unbeaufsichtigt und verwenden Sie nur für den Akku passende
Ladegeräte.
• Trennen Sie die Akkus vom Ladegerät, wenn diese vollständig aufgeladen sind.
9

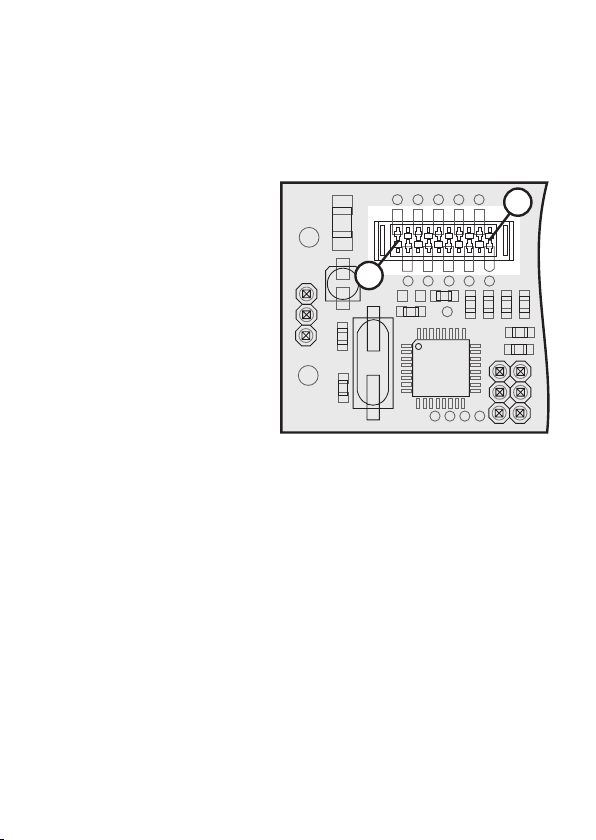
8. Anschlusskontakte und Anzeigen
Das Combiboard verfügt über folgende Anschlusskontakte bzw. Jumper-Stecker:
PAD1: Plus-Lötanschluss für die Versorgungs-
spannung (+)
PAD2: Minus-Lötanschluss für die Versorgungs-
spannung (-)
LD1: Grüne LED-Kontroll-Leuchte
LD2: Rote LED-Kontroll-Leuchte
X1: Jumper-Stecker für den Summer
X2: Jumper-Stecker für den Lichtmode
X3: Anschluss-Kontakte für LED bzw. LED-
Streifen 1 - 4
X4: Anschluss-Kontakte für LED bzw. LED-
Streifen 5 – 8
X5: Anschluss-Kontakte für Servo 1 (Kanal 5)
X6: Anschluss-Kontakte für Servo 2 (Kanal 6)
X7: Anschluss-Kontakte für Servo 3 (Kanal 7)
X8: Anschluss-Kontakte für Servo 4 (Kanal 8)
X9: Anschluss-Kontakte für ein externes RC-
Eingangssignal
X10: Anschluss-Leiste für das Interface-Flachband-
kabel
X11: Jumper-Stecker für die Schnittstellen-Auswahl
X12: Serielle Schnittstelle
X13: Anschluss-Buchse für die Empfängerkabel
X14: Anschluss-Kontakte für das Summensignal
X15: Programmierstecker für produktionsbedingte
Einstellungen
SW1: Jumper-Stecker für die Auswahl des RC-
Eingangs
SW2: Reset-Taster
BUZ1: Summer
Eine genaue Beschreibung der einzelnen
Kontakte und der Anschlussmöglichkeiten
können Sie den folgenden Abschnitten entnehmen.
Bild 1
X1
BUZ1
SW2
C14
C14
C15
C15
C12
C12
C13
C13
C8
C8
C9
C9
C10
C10
C11
C11
C16
C16
X10
X10
X12
X11
X13
D1
+
X2
R6
R7
R3
R44
R45
R1
R23
R23
SW1
X7
X8
LD2
R43
C4
X14
PAD1
IC1
C1
Q1
Q1
C2
T3
T3
X3
T2
T2
T5
T5
X4
T4
T4
R2
R2
X9
IC2
X5
X6
R21
R22
X15
R41
R42
IC3
LD1
C17
R40
Q2
C18
C19
-
PAD2
C3
10

9. Anschlussmöglichkeiten
Achtung, wichtig!
Damit der volle Funktionsumfang des Combiboards genutzt werden kann, muss der
QuadroCopter über die Firmware 2.1 oder höher verfügen. Ältere QuadroCopter
können mit Hilfe des optional angebotenen Konfigurations-Kits auf den aktuellen
Softwarestand gebracht werden. Die jeweils aktuelle Firmware steht im Internet unter conrad.com beim Combiboard und beim QuadroCopter als Download bereit.
Weitere Informationen zur aktuellen Firmware können Sie bei Bedarf auch über uns
(Kontaktinformationen siehe Kapitel 1) erhalten.
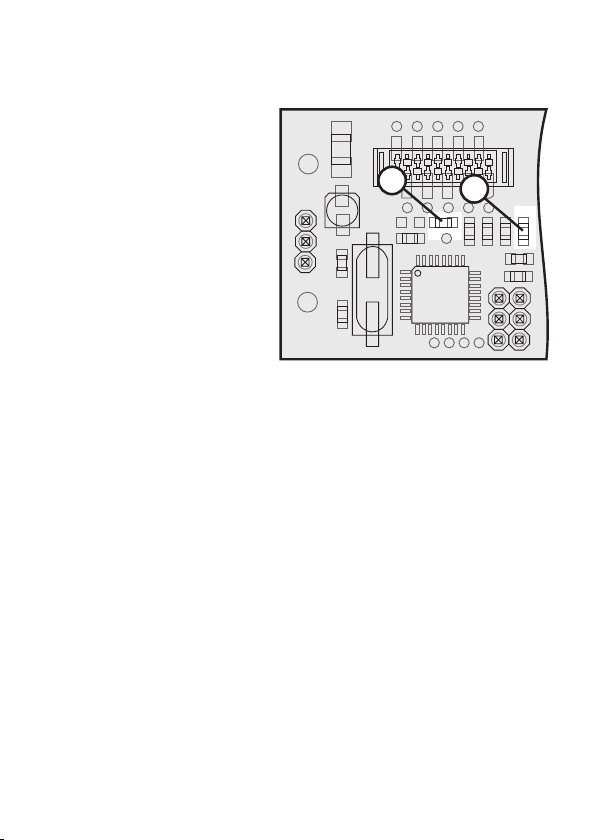
a) Stromversorgung
Für die ordnungsgemäße Funktion muss das Combiboard mit dem Antriebsakku verbunden
werden. Löten Sie dazu an der linken Seite der Platine zwei Anschlussleitungen an die Lötpunkte
„PAD1 (+)“ und „PAD2 (-)“ an. Beim QuadroCopter können Sie die Leitungen dann zum
Akkuanschluss an einer der beiden Motortreiberplatinen führen und dort an den Lötverbindungen
anbringen.
Alternativ dazu besteht die Möglichkeit, das Combiboard über den Balancer-Stecker des Antriebsakkus zu versorgen. In diesem Fall ist an den 12 V-Anschlussleitungen des Combiboards
ein passender Steckverbinder (so wie am Balancer-Anschluss des Ladegeräts) anzubringen.
Dabei werden nur die jeweils äußeren Kontakte genutzt.
Achten Sie dabei auf die korrekte Polung der Anschlussleitungen: Rot = Plus (+) und
Schwarz = Minus (-).
Achtung!
Die Spannung des Antriebsakkus wird parallel auch
über das 26polige Flachkabel zum Combiboard geführt. Diese Steckverbindungen sind aber
nicht für hohe Strombelastungen, wie sie beim
Einsatz vieler LEDs entstehen, ausgelegt.
+
PAD1
X14
-
PAD2
X13
D1
LD2
C4
R40
Q2
C18
C19
LD1
C17
IC3
R43
R42
R41
X15
Bild 2
R21
R22
X6
11
b) Empfängeranschluss
Der Empfänger wird an der Anschluss-Buchse „X13“ angeschlossen. Dafür liegt dem Combiboard
ein geeignetes Anschlusskabel bei. Die Anschlussbuchse „X13“ verfügt über 10 Kontakte, die
von rechts nach links durchnummeriert sind. Links befindet sich der Kontakt 10 und rechts der
Kontakt 1.
Die Kontakte sind folgendermaßen belegt:
Kontakt 10 = Kanal 1
Kontakt 9 = Kanal 2
Kontakt 8 = Kanal 3
Kontakt 7 = Kanal 4
Kontakt 6 = Kanal 5
Kontakt 5 = Kanal 6
Kontakt 4 = Kanal 7
Kontakt 3 = Kanal 8
Kontakt 2 = 5 V/DC/Plus (+)
Kontakt 1 = GND/Minus (-)
+
PAD1
X14
-
PAD2
X13
D1
10
C4
R40
Q2
C18
C19
LD1
C17
IC3
Die Signale der 8 Eingänge (Kanal 1 – 8) werden vom Summensignalwandler gemessen und
verarbeitet. Dabei wird aus allen verfügbaren Signalen ein Summensignal gemäß der Spezifikation für RC-Fernsteueranlagen (Pulsbreite zwischen 1 und 2 ms) gebildet. Aufgrund der Messung der Signale und der Signalverarbeitung kommt es dabei zu einer Zeitverzögerung von
einer Framelänge. Dies wirkt sich allerdings im Betrieb nicht aus und ist deshalb lediglich der
Vollständigkeit halber erwähnt.
Die gemessenen Servosignale können in beliebiger Reihenfolge, parallel, hintereinander oder
überlappend auftreten. Dabei gibt es keinerlei Einschränkung und somit ist der Summensignalwandler für alle gängigen Systeme einsetzbar. Ebenso ist keine Sync-Pause zwischen den
einzelnen Signalen erforderlich.
Um den Empfänger mit dem beiliegenden Anschlusskabel zu verbinden, verwenden Sie am
besten Servo-Anschlusskabel, die Sie auf die erforderliche Länge kürzen und dann mit den
offenen Enden des beiliegenden Empfänger-Anschlusskabel verlöten. Die Lötverbindungen
werden anschließend mit Schrumpfschlauch isoliert.
1
LD2
R43
R42
R41
X15
Bild 3
R21
R21
R22
X6
X6
12

Für die Stromversorgung des Empfängers ist es ausreichend die Kontakte 1
(Minus/-) und 2 (Plus/+) nur an einem Servo-Anschlusskabel anzulöten.
Wichtig!
Achten Sie darauf, die Eingänge des Summensignalwandlers ohne Lücken zu belegen! Bei einer 6 Kanal Anlage also von 1 - 6 und nicht beispielsweise 1 - 4 und dann
6 und 7. Bei einer derartigen Belegung würde die Elektronik die Kanäle 6 und 7 nicht
erkennen!
c) Summensignal-Ausgang
Der Summensignalwandler gibt das gebildete Summensignal (SuS) am oberen Kontakt des
Anschlusses „X14“ aus. Dieses Summensignal besteht aus so vielen Einzelsignalen wie an den
Eingängen gemessen wurden. Wird beispielsweise ein 6-Kanal Empfänger verwendet, so hat
das Summensignal ebenfalls 6 Kanäle. Die Erkennung der Kanalanzahl erfolgt über die gültige
Signalmessung an den Eingängen.
Nachdem Sie den im QuadroCopter vorhandenen 35 MHz-Empfänger ausgebaut haben, schließen Sie das Summensignalkabel am Anschluss „X14“ an. Die Impulsleitung muss dabei mit
dem oberen Kontakt des Steckers „X14“ verbunden werden.
Die Anschlüsse „SuS“, „+5V“ und „GND“ sind
mit den entsprechenden Anschlüssen der
Hauptplatine (Bild 4b) im QuadroCopter zu verbinden. Achten Sie auf die polungsrichtige Verbindung der beiden Stiftleisten!
PAD1
X14
PAD2
+
-
SuS
+5V
GND
X13
D1
LD2
C4
R40
Q2
C18
C19
LD1
C17
R43
R42
R41
X15
IC3
Bild 4a
R21
R22
X6
Bild 4b
13
d) LED-Statusanzeige
Der Summensignalwandler verfügt über eine grüne und eine rote LED zur Statusanzeige.
Eine grün leuchtende LED (LD1) zeigt
an, dass sich die Elektronik im normalen Betriebsmodus befindet.
Dies bedeutet, es können Servosignale
gemessen und gegebenenfalls ein
Summensignal erzeugt werden. Erlischt
+
PAD1
X14
die grüne LED, liegt eine grundlegende
Störung in der Elektronik vor.
Eine rot leuchtende LED (LD2) zeigt an,
dass keine Servosignale vorhanden
sind. Die Ursachen hierfür können beispielsweise Empfangsstörungen, fehlende Stromversorgung des Empfängers,
-
PAD2
ausgeschalteter Sender oder Kontaktfehler in den Anschlussleitungen sein.
Verhalten bei Empfangsstörungen
Der Summensignalwandler misst die Qualität der Signale und erkennt somit auch Empfangsstörungen. Da die Kanäle 1 - 4 überwiegend zur grundlegenden Steuerung von Modellen verwendet werden, liegt hierbei ein spezielles Augenmerk auf diesen Kanälen.
Störungen auf den Kanälen 1 - 4
Bei den Kanälen erfolgt eine Prüfung auf eine gültige Pulsbreite (zwischen 1 und 2 ms). Wird
dabei ein Fehler erkannt, so wird das Summensignal mit dem zuletzt gültigen Wert generiert.
Übersteigt die Fehlerrate das Maß für einen vernünftigen Empfang, so gibt der Summensignalwandler kein Summensignal mehr aus und aktiviert die rote LED. Somit kann das Empfangsproblem von der nachgeschalteten Logik erkannt werden und es werden keine Empfangsprobleme verschleiert.
Ist das Eingangssignal wieder gültig, so erlischt die rote LED wieder und es wird ein Summensignal erzeugt.
Störungen auf den Kanälen 5 - 8
Wirkt sich die Empfangsstörung nur auf die Kanäle 5 - 8 aus, so wird weiterhin ein Summensignal der Kanäle 1 - 4 erzeugt und die Kanäle 5 - 8 werden mit einer ungültigen Pulslänge
ausgegeben.
X13
D1
Rot
LD1
C4
R40
Q2
C17
C18
C19
LD1
IC3
LD2
R42
Rot
R41
X15
LD2
R43
Bild 5
R21
R22
X6
14

Dadurch ist weiterhin eine grundlegende Steuerung des Modells möglich, die Störung kann
aber durch eine nachgeschaltete Logik an den Kanälen 5 - 8 erkannt werden.
Ist das Eingangssignal wieder gültig, so wird ein reguläres Summensignal ausgegeben.
e) Interface-Anschluss
Für die Verbindung des Combiboards
mit dem Controlboard des QuadroCopters liegt dem Combiboard ein
26poliges Folienkabel bei, das an der
Anschluss-Leiste für das InterfaceFlachbandkabel („X10“) angesteckt
werden muss.
Achten Sie später beim Einbau des
Combiboards in den QuadroCopter
darauf, dass die beiden Anschlussleisten für das Interface-Flachbandkabel
(Combiboard und Controlboard) genau gegenüber liegen.
Der Anschluss erfolgt dann in gleicher
Weise, wie die Verbindung der beiden
Motortreiber-Platinen zum Controlboard.
X10
X10
C16
C9
C8
C16
C9
C8
C13
C13
C11
C11
1
R2
R2
T4
T4
X9
IC2
X4
C12
C12
C10
C10
T5
T5
C15
C15
C14
C14
R23
R23
26
T3
T3
T2
T2
X3
Q1
Q1
C2
C3
Bild 6
f) Inbetriebnahme des Combiboards
Wenn Sie das Combiboard mit dem Empfänger verbunden und das Summensignalkabel, die
Versorgungsspannung und das Interface-Folienkabel am QuadroCopter angeschlossen haben,
ist es erforderlich die Kanalbelegung der Fernsteuerung im QuadroCopter einzulernen.
Die genaue Vorgehensweise können Sie der Bedienungsanleitung des QuadroCopters entnehmen.
15

g) Servoanschluss
Wenn das Combiboard im QuadroCopter eingebaut und die Fernsteuerung eingelernt wurde,
können bis zu vier Servos (Kanal 5 – 8) angeschlossen und per Fernsteuerung bedient werden.
Dies ist jedoch nur dann möglich, wenn Sender und Empfänger diese Funktion zur Verfügung
stellen und die jeweiligen Empfängerausgänge am Eingangsstecker des Summensignalwandlers
(„X13“) angeschlossen wurden.
Folgende Steckkontakte sind für den Servoanschluss vorgesehen:
X5: Servo 1 (Empfängerausgang/Kanal 5)
X6: Servo 2 (Empfängerausgang/Kanal 6)
X7: Servo 3 (Empfängerausgang/Kanal 7)
X8: Servo 4 (Empfängerausgang/Kanal 8)
X10
X10
X11
PPM
R43
R42
R41
X15
+
LD2
-
X7
X8
R21
PPM
R22
+
X5
X6
-
Bitte beachten Sie beim Anschluss der Servos, dass die Impulsleitung (PPM) immer
mit dem oberen Pin der drei Kontaktstecker verbunden werden muss!
16
X12
SW1
IC2
R2
R2
T
X9
Bild 7

10. Funktionsweise Light & Sound
a) Grundsätzliche Informationen
Das Combiboard besitzt neben den Summensignalwandler noch acht LED-Ausgänge („L1“ bis
„L8“), sowie drei digitale Eingänge („IN-1“, „IN-2“, „IN-3“) und einen externen RC-Eingang („PPM“).
Die Ansteuerung der LED-Ausgänge können über 7 verschiedene Modi konfiguriert werden.
Dabei wird von der Elektronik entweder ein fixes Muster auf den Ausgängen generiert oder die
Ausgänge werden in Abhängigkeit von den Eingangssignalen geschaltet. Die über Jumper einstellbaren Modi können zusätzlich mittels eines RC-Signals (Kanal 5, 6, 7, 8 oder extern) in drei
Zustände geschaltet werden. Dadurch ergibt sich die Möglichkeit eines Umschaltens während
des Fluges.
Digitale Eingänge:
Die digitalen Eingänge schalten die jeweiligen Ausgänge, wenn der entsprechende Modus gewählt wurde. Ein High Signal (+5 V) bedeutet dabei einen eingeschalteten Ausgang. Die angeschlossene LED bzw. der angeschlossene LED-Streifen leuchtet.
Die drei digitalen Eingänge befinden sich am Interface-Anschluss „X10“ und sind folgendermaßen belegt:
IN-1 = Kontakt 6
IN-2 = Kontakt 5
IN-3 = Kontakt 16
Über die 3 digitalen Eingänge können verschiedene Statusanzeigen oder Fehlermeldungen des QuadroCopters gut sichtbar angezeigt werden. Die Funktionalität
der ausgegebenen Signale ist aber zum großen Teil von der verwendeten Firmware
abhängig und kann sich im Zuge der Weiterentwicklung des QuadroCopters ändern.
X10
X10
C16
C9
C8
C16
C9
C8
C13
C13
C11
C11
IN-2
IN-1
R2
R2
T4
T4
X9
IC2
X4
C12
C12
C10
C10
T5
T5
C15
C15
C14
C14
R23
R23
IN-3
T3
T3
T2
T2
X3
Q1
Q1
C2
C3
Bild 8
17

Eine genaue Beschreibung mit der Belegung der 3 digitalen Eingänge können Sie der Text-
g
f
g
f
g
f
g
f
g
f
g
f
g
f
Datei der jeweiligen Firmware entnehmen.
RC-Eingang:
Mit Hilfe des RC-Eingangs können Sie jeden Lichtmode in drei verschiedene Schaltzustände
bringen. Verwenden Sie dazu am Sender einen Umschalter mit Mittelstellung (High, Neutral,
Low) oder einen Schiebe- bzw. Drehregler. Für die Umschaltung des Lichtmodes kann der Kanal 5 – 8 oder ein extern eingespeistes Servosignal (PPM) verwendet werden.
In Verbindung mit den 7 unterschiedlichen Modi ergeben sich dann folgende Lichtmuster:
Mode PPM L1 L2 L3 L4 L5 L6 L7 L8 Summer
Hi
h IN-1 IN-2 IN-3 DF SF SB DF Bat Bat
1 Neutral IN-1 IN-2 IN-3 DF SF SB Of
Low IN-1 IN-2 IN-3 DF SF SB On Bat Bat
Hi
h IN-1 IN-2 IN-3 DF SF SB DF Bat IN-3
2 Neutral IN-1 IN-2 IN-3 DF SF SB Of
Low IN-1 IN-2 IN-3 DF SF SB On Bat IN-3
Hi
h Lauflicht L1 nach L8 IN-3
3 Neutral Of
Low Lauflicht L8 nach L1 IN-3
Hi
h Invertiertes Lauflicht L1 nach L8 IN-3
4 Neutral Of
Low Invertiertes Lauflicht L8 nach L1 IN-3
Hi
h Lauflicht L1 nach L4 IN-1 IN-3 SB Bat IN-3
5 Neutral Of
Low Lauflicht L4 nach L1 IN-1 IN-3 SB Bat IN-3
Hi
h Invertiertes Lauflicht L1 nach L4 IN-1 IN-3 SB Bat IN-3
6 Neutral Of
Low Invertiertes Lauflicht L4 nach L1 IN-1 IN-3 SB Bat IN-3
Hi
h WB1 WB2 IN-1 IN-2 IN-3 SF DF Bat IN-3
7 Neutral WB1 WB2 IN-1 IN-2 IN-3 SF Of
Low WB1 WB2 IN-1 IN-2 IN-3 SF On Bat IN-3
IN-1 IN-3 SB Bat IN-3
IN-1 IN-3 SB Bat IN-3
Bat Bat
Bat IN-3
IN-3
IN-3
Bat IN-3
Bedeutungen der Abkürzungen:
SB: Slow Blink (400 ms ein, 400 ms aus)
FB: Fast Blink (200 ms ein, 200 ms aus)
SF: Single Flash (50 ms, 1 s Pause)
DF: Double Flash (50 ms, 50 ms, 1 s Pause)
Bat: Batterie-Warnung in 5 Stufen
(>9,4 V = OFF; <9,4 V = SF; <9,2 V = DF; <9,0 V = SB; <8,8 V = FB)
WB1, WB2: Wechselblinker (Wechsel alle 100 ms)
Lauflicht Geschwindigkeit: Wechsel alle 100 ms
18

b) Auswahl des Lichtmodus
Die 7 Lichtmodi können mit Hilfe der Jumper-Stecker („X2“) eingestellt werden. Je nach gewünschtem Mode müssen die einzelnen Kontakte mit einer Kurzschluss-Brücke (Jumper) verbunden werden. Für die jeweiligen Modes sind folgende Brücken zu setzen:
Mode 1: Kein Jumper
Mode 2: Jumper 1 - 2
Mode 3: Jumper 3 - 4
Mode 4: Jumper 1 - 2 und Jumper 3 - 4
Mode 5: Jumper 2 - 4
Mode 6: Jumper 1 - 3
Mode 7: Jumper 1 - 3 und Jumper 2 - 4
SW2
C12
C12
C15
C15
C14
C14
R23
R23
T3
T3
Q1
Q1
C2
X3
C3
BUZ1
X1
R7
R45
R1
C1
R44
IC1
R6
R3
1
3
5
2
X2
4
6
Bild 9
19

c) Auswahl des RC-Eingangs
Der gewünschte RC-Eingang zum Umschalten der Lichteffekte kann mit Hilfe der Jumper-Stekker SW1 eingestellt werden. Dabei muss immer der obere und der untere Kontakt mit der
Kurzschluss-Brücke (Jumper) verbunden werden. Die Zuordnung ist dabei wie folgt:
Servoauswahl 1 = Kanal 8
Servoauswahl 2 = Kanal 7
Servoauswahl 3 = Kanal 6
Servoauswahl 4 = Kanal 5
In der nebenstehenden Abbildung ist der Jumper auf Servoauswahl 1 gesetzt. Die Umschaltung
des eingestellten Lichtmodus kann nun am Sender über Kanal 5 erfolgen.
X10
X10
X11
1
X7
X8
LD2
R43
R42
R41
R21
R22
X15
PPM
X5
X6
Die Ansteuerung über Kanal 5, 6, 7 oder 8 ist aber nur dann möglich, wenn sie auch
von der Hauptsteuerung erzeugt wird. Die Signalerzeugung ist dabei vom Summensignalwandler unabhängig!
Sollte dies nicht der Fall sein, so können Sie am linken Anschluss-Kontakt des Stekkers „X9“ ein externes Servo-Signal (PPM) von einem noch nicht belegten Empfängerausgang (z.B. Kanal 9) direkt einspeisen.
Sollten Sie keinen RC-Eingang nutzen und somit auf die Umschaltmöglichkeit verzichten, so ist immer der PPM-Schaltzustand „High“ aktiv!
20
X12
3
SW1
IC2
4
R2
R2
T
X9
2
Bild 10

d) Anschluss der LED-Streifen/LEDs
Das Combiboard bietet die Möglichkeit bis zu acht LED-Streifen mit einer Betriebsspannung
von 12 V und einer maximalen Stromaufnahme von 1 A/pro Streifen direkt anzuschließen. Auch
wenn die MOSFET-Schaltausgänge (FDS6890A) mit bis zu 7,5 A belastbar sind, wird aufgrund
des Bord-Layouts und der Kühlung empfohlen, die einzelnen Ausgänge nicht höher als mit 1 A
zu belasten.
Wenn Sie einzelne LEDs anschließen wollen, die eine geringere Betriebsspannung von lediglich 2 – 3 V aufweisen, so muss ein geeigneter Vorwiderstand (Rv) berechnet werden. Zur
Berechnung des Vorwiderstandes sollten Sie mit einer Betriebsspannung von 12 V arbeiten, da
ein frisch geladener 3zelliger LiPo-Akku anstelle von 11,1 V weit über 12 V aufweisen kann.
Rechenbeispiel:
Angenommen, die verwendete Leuchtdiode hat eine Versorgungsspannung von 2,6 V und eine
Stromaufnahme von 20 mA. Nun muss zunächst die Spannung am Vorwiderstand ausgerechnet werden:
12 V - 2,6 V = 9,4 V
Sollten Sie zwei gleiche Leuchtdioden hintereinander schalten wollen, so sind 2 x
2,6 V = 5,2 V von der Betriebsspannung 12 V abzuziehen (12 V - 5.2 V = 6.8 V)
Bei drei gleichen Dioden sind es 3 x 2.6 V = 7.8V, die von der Betriebspannung 12 V
abzuziehen sind (12 V - 7.8 V = 4.2 V).
Nun kann nach dem Ohm’schen Gesetz R = U : I der Vorwiderstand Rv berechnet werden:
Rv = 9,4 V : 0,02 A = 470 Ohm
Mit der Leistungsformel P = U x I kann noch die Leistung berechnet werden, die der Vorwiderstand
aushalten muss:
9,4 V x 0,02 A = 0,188 W
Ein Widerstand mit einer Leistung von ¼ W (0,25 W) wäre demzufolge ausreichend.
Für den Anschluss der LEDs bzw. LED-Streifen sind jeweils die oberen Anschluss-Kontakte der
Stecker „X3“ („L1“ bis „L4“) und „X4“ („L5“ bis „L8“) vorgesehen. Die unteren Anschluss-Kontakte
sind mit dem Plus-Anschluss (+) des Antriebsakkus (11,1 V vom LiPo-Akku) verbunden.
21

Anschluss-Schema
Bild 11 zeigt Ihnen den schematischen Anschluss einer LED mit Vorwiderstand am Ausgang am
Ausgang „L1“ und den Anschluss eines 12 V-Leuchtstreifens am Anschluss „L7“.
Wichtig!
Bitte achten Sie beim Anschluss von LEDs und LED-Leuchtstreifen auf die korrekte
Polung der Anschlussleitungen.
X10
X10
C16
C11
C10C9C8
C13
C12
C15
L1
C14
C13
C12
C15
C14
R23
R23
T3
T3
T2
T2
+
Rv
L2
Q1
Q1
L3
L4
C2
X3
C3
LED
C16
C11
C10C9C8
R2
R2
X9
L5
IC2
L6
T5
T5
T4
T4
L8
L7
X4
-
+
12 V
-
Bild 11
In der Praxis haben sich konfektionierte BEC-Buchsen mit offenen Kabelenden bestens für den LED-Anschluss bewährt.
22

e) Summer-Konfiguration
Der Summer kann mit Hilfe des Jumper-Steckers („X1“) ein- oder ausgeschaltet werden.
Sind die Kontakte 1 und 2 mit Hilfe einer Kurzschluss-Brücke verbunden, ist der Summer aus.
Sind die Kontakte 2 und 3 mit Hilfe einer Kurzschluss-Brücke verbunden, ist der Summer aktiv
und gibt die Signale entsprechend der Modi-Tabelle aus.
SW2
C12
C12
C15
C15
C14
C14
R23
R23
T3
T3
Q1
Q1
C2
X3
C3
BUZ1
3
X1
2
R7
R45
R1
C1
IC1
1
R6
R44
R3
X2
Bild 12
23

11. PC-Anschluss
Das Combiboard verfügt, ebenso wie das Controlboard des QuadroCopters, über eine serielle
Schnittstelle. Über diese beiden Schnittstellen können die Elektroniken mit einem PC kommunizieren.
Mit Hilfe des Jumpers „X11“ kann die serielle Schnittstelle des Combiboards entweder über das
26polige Interfacekabel zum Controlboard des QuadroCopters (2. Interne Schnittstelle) kommunizieren oder auf den Schnittstellen-Anschluss „X12“ geschaltet werden. Diese Funktion wird
für zukünftige Erweiterungen verwendet und ist im Moment ohne Funktion.
Sind die Kontakte 1 und 2 mit Hilfe einer Kurzschluss-Brücke verbunden, ist die Schnittstelle am
Controlboard des QuadroCopters aktiviert. Sind die Kontakte 2 und 3 mit Hilfe einer KurzschlussBrücke verbunden, ist die Schnittstelle am Combiboard („X12“) aktiviert.
Die Pin-Belegung des Schnittstellensteckers „X12“ können Sie Bild 13 entnehmen.
3
2
1
X10
X10
X11
X7
X8
LD2
R43
R42
R41
X15
GND
R21
R22
X5
X6
Falls die PC-Schnittstelle im Computer keine ausreichende Stromversorgung für die
Elektronik im QuadroCopter zur Verfügung stellt, muss der Antriebsakku am
QuadroCopter angeschlossen werden.
24
X12
SW1
TXD RXD
IC2
R2
R2
+5V
T
X9
Bild 13

12. Wartung und Pflege
Die Elektronik bedarf keinerlei Wartung oder Pflege, sollte jedoch vor äußeren Einflüssen wie
Feuchtigkeit oder Nässe geschützt werden.
13. Entsorgung
a) Allgemein
Entsorgen Sie das Produkt am Ende seiner Lebensdauer gemäß den geltenden
gesetzlichen Vorschriften.
b) Batterien und Akkus
Sie als Endverbraucher sind gesetzlich (Batterieverordnung) zur Rückgabe aller gebrauchten
Batterien und Akkus verpflichtet; eine Entsorgung über den Hausmüll ist untersagt!
Schadstoffhaltige Batterien/Akkus sind mit nebenstehenden Symbolen gekennzeich-
net, die auf das Verbot der Entsorgung über den Hausmüll hinweisen. Die Bezeich-
nungen für das ausschlaggebende Schwermetall sind: Cd=Cadmium,
Hg=Quecksilber, Pb=Blei (Bezeichnung steht auf Batterie/Akku z.B. unter den links
abgebildeten Mülltonnen-Symbolen).
Ihre verbrauchten Batterien/Akkus können Sie unentgeltlich bei den Sammelstellen
Ihrer Gemeinde, unseren Filialen oder überall dort abgeben, wo Batterien/Akkus
verkauft werden.
Sie erfüllen damit die gesetzlichen Verpflichtungen und leisten Ihren Beitrag zum Umweltschutz.
25

14. Technische Daten
Stromversorgung LiPo-Akku (3s1p) ............ 11,1 V
Kanalzahl Summensignalwandler ...............max. 8
Servo-Anschlüsse ........................................4
Digitale Eingänge ........................................ 3
LED-Anschlüsse .......................................... 8
Strombelastbarkeit pro LED-Ausgang .........1000 mA
PPM-Eingänge ............................................ 1
Abmessung (L x B x H) ................................ 100 x 30 x 20 mm
Platinen-Gewicht ohne Kabel und Stecker ..Ca. 20 g
Arbeitstemperaturbereich ............................ 0 °C bis +40 °C
26

27

Impressum
Diese Bedienungsanleitung ist eine Publikation der Conrad Electronic SE, Klaus-Conrad-Str. 1, D-92240 Hirschau
(www.conrad.com).
Alle Rechte einschließlich Übersetzung vorbehalten. Reproduktionen jeder Art, z. B. Fotokopie, Mikroverfilmung, oder die
Erfassung in elektronischen Datenverarbeitungsanlagen, bedürfen der schriftlichen Genehmigung des Herausgebers.
Nachdruck, auch auszugsweise, verboten.
Diese Bedienungsanleitung entspricht dem technischen Stand bei Drucklegung. Änderung in Technik und Ausstattung
vorbehalten.
© Copyright 2011 by Conrad Electronic SE.
V3_0611_01
 Loading...
Loading...