

!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'1'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
Quadrocopter „650“ ARF
Nr produktu: 209300
Instrukcja obsługi
Wersja 11/10

!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'2'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
Spis treści
1. Wstęp ........................................................................................................................................................................................................... 4
2. Przeznaczenie .............................................................................................................................................................................................. 4
3. Opis produktu ............................................................................................................................................................................................... 4
4. W zestawie ................................................................................................................................................................................................... 5
5. Objaśnienie symboli ..................................................................................................................................................................................... 5
6. Instrukcje bezpieczeństwa ........................................................................................................................................................................... 6
a) Informacje ogólne .................................................................................................................................................................................... 6
b) Przed uruchomieniem ............................................................................................................................................................................. 6
c) W trakcie działania .................................................................................................................................................................................. 6
7. Informacje o bateriach i akumulatorach ........................................................................................................................................................ 7
a) Nadajnik .................................................................................................................................................................................................. 7
b) Pakiet zasilający ..................................................................................................................................................................................... 7
8. Montaż Quadrocoptera ................................................................................................................................................................................ 8
a) Składanie nóg podporowych .................................................................................................................................................................. 8
b) Montaż śmigieł ....................................................................................................................................................................................... 9
c) Montaż odbiornika ................................................................................................................................................................................ 10
d) Montaż pakietu zasilającego ................................................................................................................................................................ 10
e) Montaż górnej osłony ........................................................................................................................................................................... 11
9. Sprawdzenie konfiguracji ............................................................................................................................................................................ 11
a) Informacje ogólne .................................................................................................................................................................................. 11
b) Programowanie kanałów nadajnika (ogólne) ........................................................................................................................................ 11
c) Programowanie komendy „Throttle” ...................................................................................................................................................... 12
d) Programowanie komendy „Yaw” ........................................................................................................................................................... 12
e) Programowanie komendy „Pitch” .......................................................................................................................................................... 12
f) Programowanie komendy „Roll” ............................................................................................................................................................. 12
g) Ustawienia trybu lotu ............................................................................................................................................................................. 12
h) Konfiguracja za pomocą oprogramowania PC ...................................................................................................................................... 13
i) Tryby lotu ................................................................................................................................................................................................ 13
10. Przed każdorazowym użyciem ................................................................................................................................................................ 14
a) Sprawdzenie połączeń ........................................................................................................................................................................ 14
b) Sprawdzenie ruchomych elementów ..................................................................................................................................................... 14
c) Regulacja pozycji neutralnej .................................................................................................................................................................. 14
11. Zabezpieczenia ......................................................................................................................................................................................... 15
a) Zabezpieczenie silnika .......................................................................................................................................................................... 15
b) Lądowanie awaryjne ............................................................................................................................................................................. 15
c) Monitorowanie niskiego napięcia .......................................................................................................................................................... 15
d) Funkcja odnajdywania ........................................................................................................................................................................... 15
12. Wskaźniki LED ......................................................................................................................................................................................... 15
a) Gotowy do lotu ...................................................................................................................................................................................... 15
b) Uruchomienie Quadrocoptera ............................................................................................................................................................... 15
c) Tryb konfiguracji .................................................................................................................................................................................... 15
d) Regulacja uchybu zdalnego sterowania ................................................................................................................................................ 15
e) Dostosowanie pozycji neutralnej ........................................................................................................................................................... 16
f) Zakłócenia radiowe przed startem ......................................................................................................................................................... 16
g) Zakłócenia radiowe podczas lotu ......................................................................................................................................................... 16
h) Funkcja lądowania awaryjnego ............................................................................................................................................................. 16
i) Monitorowanie niskiego napięcia ........................................................................................................................................................... 16
13. Informacje o płycie combi „QC08” ............................................................................................................................................................ 16
a) Styki i zworki płyty combi ...................................................................................................................................................................... 16
b) Wyjście sygnału całkowitego ............................................................................................................................................................... 17
Zdjęcie 16b ................................................................................................................................................. Error! Bookmark not defined.
c) Wskaźnik statusu LED .......................................................................................................................................................................... 17
d) Połączenie złącza ............................................................................................................................................................................... 18
e) Połączenie serwo ................................................................................................................................................................................. 18
14. Funkcja światła i dźwięku ....................................................................................................................................................................... 18
a) Informacje ogólne .................................................................................................................................................................................. 18
b) Wybór trybu światła .............................................................................................................................................................................. 19
c) Wybór wejścia zdalnego sterowania ..................................................................................................................................................... 19
d) Podłączanie pasków LED/diod LED ..................................................................................................................................................... 20
e) Konfiguracja brzęczyka ......................................................................................................................................................................... 20
15. Połączenie PC płyty combi ...................................................................................................................................................................... 20

!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'3'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
16. Informacje dotyczące pierwszego startu .................................................................................................................................................. 21
a) Ogólne sterowanie ................................................................................................................................................................................ 21
b) Uruchamianie silnika ............................................................................................................................................................................. 21
c) Odcięcie silników .................................................................................................................................................................................. 21
d) Zawis w powietrzu ................................................................................................................................................................................. 21
e) Yaw ....................................................................................................................................................................................................... 22
f) Pitch ....................................................................................................................................................................................................... 22
g) Roll ........................................................................................................................................................................................................ 22
17. Pierwszy lot ............................................................................................................................................................................................... 22
18. Czyszczenie, konserwacja i naprawa ....................................................................................................................................................... 23
a) Regularne czyszczenie ......................................................................................................................................................................... 23
b) Wymiana śmigła ................................................................................................................................................................................... 23
c) Wymiana silnika ..................................................................................................................................................................................... 23
d) Wymiana ramienia promienistego ......................................................................................................................................................... 23
e) Wymiana całej ramy ............................................................................................................................................................................. 23
f) Wymiana płyty statecznika .................................................................................................................................................................... 23
19. Utylizacja .................................................................................................................................................................................................. 24
a) Informacje ogólne .................................................................................................................................................................................. 24
b) Baterie i akumulatory ............................................................................................................................................................................. 24
20. Dane techniczne ....................................................................................................................................................................................... 24
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'4'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
1. Wstęp
Drogi Kliencie,
Dziękujemy za zakup produktu.
Produkt spełnia wymogi aktualnych wytycznych ustawowych, europejskich i krajowych.
Aby nie naruszać zasad licencji i bezpieczeństwa, należy zapoznać się z instrukcją obsługi!
Niniejsza instrukcja obsługi stanowi część produktu. Zawiera ważne informacje dotyczące tego, jak uruchomić
produkt i jak z nim postępować. Prosimy o wzięcie tego pod uwagę w razie przekazania tego produktu osobom
postronnym.
Prosimy o zachowanie instrukcji na przyszłość!
Wszystkie nazwy firm i oznaczenia produktów zawarte w niniejszej instrukcji są znakami handlowymi ich poszczególnych właścicieli.
Wszelkie prawa zastrzeżone.
W razie jakichkolwiek zapytań technicznych, skontaktuj się z:
Nr tel.: +49 9604 / 40 88 80
Nr faks: +49 9604 / 40 88 48
E-mail: tkb@conrad.de
Pon-czw. 8.00 do 16.30, pt 8.00 do 14.00
Pon-pt 8.00 -12.00, 13.00 - 17.00
2. Przeznaczenie
Quadrocopter 650 ARF jest modelem latającym; przeznaczonym do prywatnego użytku w dziedzinie modelarskiej i sterowania.
System nie jest przeznaczony do innych zastosowań. Każde użycie niezgodne z zastosowaniem może uszkodzić produkt. Co więcej,
wiąże się z ryzykiem zwarcia, pożaru, porażenia prądem, itp.
Należy bezwzględnie zwrócić uwagę na instrukcje bezpieczeństwa! Produkt nie może zostać zamoczony ani zawilgocony!
Produkt nie jest zabawką i należy go trzymać poza zasięgiem dzieci poniżej 14. roku życia.
Zwróć uwagę na wszystkie instrukcje bezpieczeństwa w niniejszej instrukcji obsługi. Zawierają one ważne informacje
dotyczące użytkowania produktu.
Użytkownik jest odpowiedzialny za bezpieczne użytkowanie modelu! Model jest złożony i gotowy do użycia.
3. Opis produktu
Elektryczny dron “QuadroCopter 650 ARF” jest złożony w możliwie największym stopniu. W profesjonalnych zastosowaniach takie
„drony” są wykorzystywane do szeregu zadań. Za stabilizację pozycji odpowiadają najnowsze mikrokontrolery z kontrolą pozycjonowania
i czujniki przyspieszenia.
Wysokiej jakości bezszczotkowe silniki elektryczne na prąd stały ze specjalnie zaprojektowanym napędem umożliwiają długi lot i oferują
rezerwę mocy na dodatkowy ładunek, np. aparat cyfrowy itp. Nowatorskie sterowanie i elektroniczna autostabilizacja przekładają się na
świetne właściwości lotu i charakterystykę sterowania. Różnorodne tryby latania pozwalają cieszyć się pełnią wrażeń ze sterowania
zarówno początkującym, jak i ekspertom.
Quadrocopter może być użytkowany w pomieszczeniach i na zewnątrz. Wbudowana elektronika może zminimalizować niepożądane
zmiany w wysokości lotu, jednak nie jest w stanie ich całkowicie wyeliminować. Jako że czterosilnikowiec waży mniej niż kilogram, jest w
pewnym stopniu wrażliwy na podmuchy wiatru. Dlatego optymalnymi warunkami do lotu jest brak lub tylko niewielki wiatr.
Rama wykonana jest z aluminium i syntetycznych komponentów, dzięki czemu jest lekka i sztywna, oferując świetne właściwości lotu.
Dzięki temu, że rama jest składana, możliwe jest zaoszczędzenie miejsca podczas transportu modelu. Rama zawiera całą elektronikę
niezbędną do sterowania urządzenia, jak również miejsce na dodatkowe płytki rozszerzające możliwości. Wysoka stabilność i
sztywność konstrukcji oraz ochrona elektroniki jest możliwa dzięki zastosowaniu konstrukcji kratowej.
W związku ze swoją konstrukcją model jest przeznaczony dla doświadczonych modelarzy helikopterów, którzy nie są zainteresowani
robieniem akrobacji typowych dla innych helikopterów.
Jednakże ten model z dużymi możliwościami manewrowania jest także odpowiedni dla początkujących! Przed pierwszym lotem
zalecane jest przejście programu treningowego w symulatorze lotu helikopterów i/lub wsparcie doświadczonego pilota modeli
helikopterów.
Quadrocopter może zostać rozszerzony o dodatkową elektronikę (rozszerzenie złącza dostępnego z jednostki sterującej) i dodatkowe
mechanizmy na ramie.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'5'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
4. W zestawie
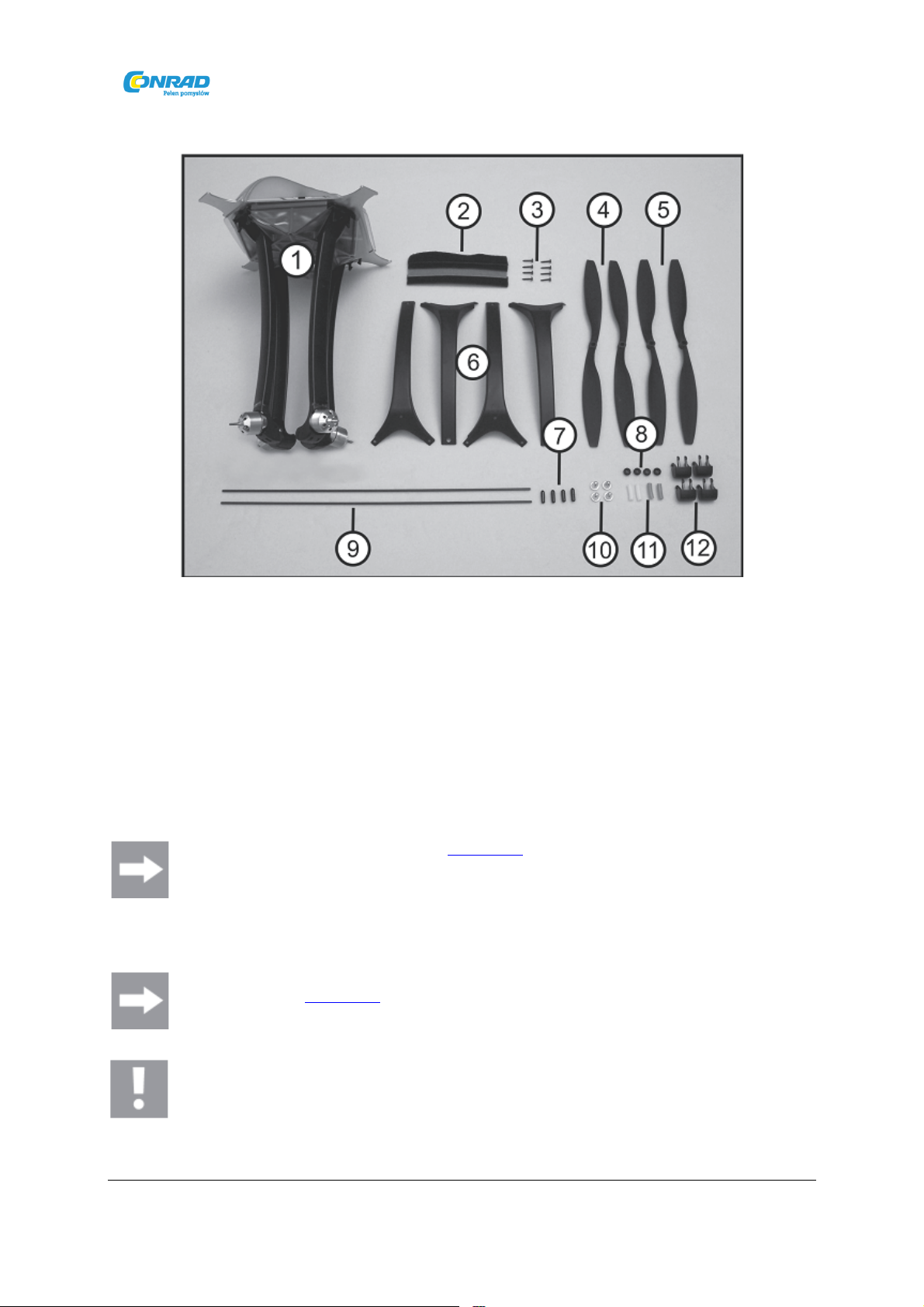
Zdjęcie 1
1) Zmontowany Quadrocopter
2) Taśmy rzepowe (4 szt.)
3) Śruby (8 szt.)
4) Dwa śmigła kręcące się w lewo
5) Dwa śmigła kręcące się w prawo
6) Nogi podporowe (4 szt.)
7) Cokoły płóz (4 szt.)
8) Rękawy gumowe (4 szt.)
9) Płozy (2 szt.)
10) Końcówki śmigła (4 szt.)
11) Węże silikonowe (4 szt.)
12) Cokoły ramion promienistych (4 szt.)
Niewidoczne na zdjęciu: instrukcja obsługi po niemiecku (papierowa), instrukcja obsługi po angielsku, francusku i holendersku na CD,
przewody anteny, zwieracze (2) wtyczki silnoprądowe do podłączenia baterii, taśmy rzepowe do instalacji akumulatora (2) pierścienie
osadcze (4) do końcówek wirnika, samoprzylepne zderzaki gumowe (4) i guma do mocowania pokrywy.
Lista części zamiennych jest dostępna na stronie www.conrad.pl w zakładce dokumentacji przy odpowiednim produkcie.
Listę części zamiennych można także zamówić telefonicznie. Informacje kontaktowe znajdują się na początku instrukcji
we „Wstępie”.
Następujące elementy są niezbędne do uruchomienia modelu, a nie są zawarte w zestawie:
Montaż: Lutownica i niezbędne narzędzia.
Sterowanie: Aby sterować modelem wymagana jest aparatura 6-kanałowa, 3-komorowy akumulator do modeli lotniczych LiPo o
pojemności min. 2500 mAh i tempie rozładowania 25 C, jak również kompatybilna ładowarka LiPo z balanserem.
Na stronie internetowej www.conrad.pl można znaleźć katalogi wypróbowanych i przetestowanych akcesoriów.
5. Objaśnienie symboli
Wykrzyknik sygnalizuje szczególne ryzyko w obsługiwaniu, operowaniu lub kontrolowaniu produktu.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'6'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
Strzałka sygnalizuje specjalne wskazówki i informacje operacyjne.
6. Instrukcje bezpieczeństwa
Gwarancja straci ważność, jeśli uszkodzenie zostało wywołane przez niestosowanie się do instrukcji obsługi. Nie
ponosimy odpowiedzialności za żadne uszkodzenia wynikłe w ten sposób!
Nie ponosimy odpowiedzialności za szkody materialne ani osobowe spowodowane przez niewłaściwe użytkowanie
czy niezastosowanie się do instrukcji bezpieczeństwa! W takich przypadkach gwarancja traci ważność.
Gwarancja nie obejmuje zwykłego zużycia podczas standardowego użytkowania ani rozbicia (np. złamane wirniki lub
rama).
Drogi Kliencie, następująca instrukcja bezpieczeństwa jest przeznaczona nie tylko dla ochrony produktu, ale także dla
Twojego własnego bezpieczeństwa i bezpieczeństwa innych. Dlatego przed użyciem produktu należy uważnie
przeczytać ten rozdział!
a) Informacje ogólne
Uwaga, ważna informacja!
Kierowanie modelem może doprowadzić do szkód materialnych i/lub osobowych. Dlatego upewnij się, że jesteś
odpowiednio ubezpieczony, używając modelu, np. uzyskując prywatne ubezpieczenie odpowiedzialności cywilnej. Jeś li
już posiadasz ubezpieczenie, dowiedz się przed uruchomieniem, czy obejmuje sterowanie modelem.
Należy pamiętać, że w niektórych krajach UE aby latać modelami wymogiem jest posiadanie ubezpieczenia.
• Nieupoważnione przekształcanie i/lub modyfikacje produktu są niedopuszczalne z powodów bezpieczeństwa i licencji (CE).
• Produkt nie jest zabawką. Nie jest odpowiedni dla dzieci poniżej 14. roku życia.
• Produkt nie może zostać zmoczony ani zawilgocony. Delikatna elektronika sterująca Quadrocoptera jest również wrażliwa na
zmiany temperatury i zoptymalizowana do konkretnego zakresu temperatur. Należy unikać latania modelem w temperaturze
poniżej 10°C.
• Jeśli nie posiadasz odpowiedniej wiedzy dotyczącej latania zdalnie sterowanymi dronami, poradź się doświadczonego
modelarza lub klubu modelarskiego. Ewentualnie przed pierwszym użyciem zaleca się ćwiczenia na symulatorze lotu.
• Nie zostawiaj materiału pakunkowego bez nadzoru. Może się stać niebezpieczną zabawką w rękach dzieci!
• Produkt został zaprojektowany do użytku w temperaturach pomiędzy 10°C a 40°C w warunkach normalnej wilgotności
powietrza podczas suchego dnia w Europie Centralnej. Latanie w innych warunkach może spowodować zmiany właściwości
materiałów i związane z tym uszkodzenia.
• Maksymalna masa modelu gotowego do lotu to 2000 g. Przekroczenie tej wartości może prowadzić do uszkodzenia układu
napędowego i spowodować wypadek!
• W razie pojawienia się jakichkolwiek pytań, na które nie ma odpowiedzi w instrukcji obsługi, skontaktuj się z naszym
wsparciem technicznym lub z innym ekspertem.
b) Przed uruchomieniem
• Przestrzegaj instrukcji obsługi używanego systemu zdalnego sterowania.
• Regularnie sprawdzaj stan bezpieczeństwa modelu i aparatury zdalnego sterowania. Zwracaj uwagę na uszkodzone wtyczki,
pęknięcia lub uszkodzone kable.
• Wszystkie części ruchome powinny poruszać się swobodnie, jednak nie powinny mieć luzów na łożyskach.
• Przed każdym uruchomieniem należy sprawdzić bezpieczną pozycję śmigieł.
• Ładuj akumulator modelu, jest to niezbędne do prawidłowego działania urządzenia. Należy również pamiętać o ładowaniu
akumulatorów aparatury zdalnego sterowania zgodnie z zaleceniami producenta.
• Jeśli do zasilania nadajnika używane są baterie, należy sprawdzić, czy pozostało w nich dostatecznie dużo energii (test
baterii). Jeśli baterie są zużyte, należy zawsze wymienić cały komplet, nigdy pojedynczy element.
• Zawsze najpierw należy włączyć nadajnik! Po jego włączeniu przepustnicę ustaw na najniższą wartość (silnik jest
wyłączony)! Wtedy można bezpiecznie podłączyć pakiet zasilający do modelu. W przeciwnym razie po podłączeniu pakietu
zasilającego mogą wystąpić nieoczekiwane reakcje, a silniki mogą się samoczynnie uruchomić!
• W trakcie działania śmigieł należy się upewnić, że w ich zasięgu nie ma żadnych obiektów ani części ciała.
c) W trakcie działania
• Nie należy podejmować ryzyka latając modelem. Twoje bezpieczeństwo i bezpieczeństwo bezpoś redniego otoczenia zależy
wyłącznie od odpowiedzialnego sterowania modelem.
• Niewłaściwe sterowanie może spowodować poważne uszkodzenia ludzi i mienia!. Należy się upewnić, że zachowany jest
bezpieczny dystans od ludzi, zwierząt i obiektów w trakcie latania.
• Należy wybrać odpowiednie miejsce do sterowania modelem.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'7'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
• Lataj modelem wyłącznie, gdy Twoja koncentracja nie jest zaburzona. Wpływ zmęczenia, alkoholu lub leków może wpływać
na czas reakcji i możliwość reagowania.
• Nie kieruj modelu bezpośrednio w stronę widzów lub siebie.
• Silniki, system sterowania i akumulator Quadrocoptera mogą się nagrzewać podczas latania. Z tego powodu sugeruje się
robić 10-15-minutowe przerwy po ok. 20 minutach lotu, zanim naładuje się pakiet zasilający lub uruchomisz model z
zapasowym pakietem. Silniki napędzające muszą się schłodzić do temperatury otoczenia.
• Nigdy nie wyłączaj aparatury (nadajnika) podczas pracy modelu. Po lądowaniu zawsze najpierw odłączaj pakiet zasilający lub
wyłączaj model. Tylko wtedy można wyłączyć aparaturę.
• W razie wykrycia defektu bądź usterki należy usunąć problem przed ponownym uruchomieniem modelu.
• Nie należy wystawiać modelu ani aparatury na bezpośrednie działanie promieni słonecznych ani nadmiernej temperatury
przez dłuższy czas.
• W razie poważnego wypadku (np. spadku z wysokiej wysokości) elektryczne żyroskopy mogą zostać uszkodzone i/lub
rozregulowane. W takim przypadku należy dokładnie sprawdzić funkcjonalność przed ponownym lotem. Rekomendowanie
jest wtedy ustawienie pozycji neutralnej.
• W razie wypadku przepustnica powinna zostać natychmiast ustawiona na zero. Kręcące się śmigła mogą zostać uszkodzone,
jeśli wejdą w kontakt z przeszkodami. Zanim ponownie uruchomisz model sprawdź ewentualne uszkodzenia!
• Aby uniknąć uszkodzeń Quadrocoptera w związku z rozładowaniem akumulatora, należy zwracać baczną uwagę na
sygnalizację LED modelu. Jako że fabryczna dioda LED miga jednostajnie, rekomendowane jest zakupienie diody
ostrzegawcdzej LiPo, nr produktu: 230327. Dioda LiPo informuje o niskim stanie akumulatora za pomocą diod LED.
Urządzenie należy odpowiednio zamontować w Quadrocopterze.
Zamiast tego można użyć wbudowanej płyty combi do wyświetlania spadku napięcia poprzez podłączone diody LED. W tym
celu zapoznaj się z informacjami w rozdziale 14 „Funkcja światła i dźwięku”.
7. Informacje o bateriach i akumulatorach
Pomimo codziennego korzystania z baterii i akumulatorów nadal związanych jest z nimi kilka zagrożeń i problemów.
Szczególnie dla akumulatorów LiPo/Li-Ion ważne jest postępowanie zgodne z odpowiednimi wytycznymi w związku z
dużą ilością przechowywanej energii (w porównaniu z konwencjonalnymi akumulatorami NiCd lub NiMH), gdyż w razie
złego korzystania istnieje ryzyko wybuchu lub pożaru.
Quadrocopter jest dostarczony bez pilota, baterii i ładowarki. Mimo to ze względów bezpieczeństwa zamieszczamy
szczegółowe informacje na temat baterii i pakietów zasilających. W razie korzystania z innych akcesoriów (np. pilota,
akumulatorów, ładowarki) należy zapoznać się z ich instrukcją obsługi!
a) Nadajnik
• Baterie/akumulatory należy trzymać z dala od dzieci.
• Nie zostawiaj baterii/akumulatorów leżących bez nadzoru. Istnieje ryzyko, że zostaną połknięte przez dzieci lub zwierzęta. W
razie połknięcia należy natychmiast skonsultować się z lekarzem!
• Baterie/akumulatory nie mogą być zwierane, rozmontowywane lub wrzucane do ognia. Ryzyko eksplozji!
• Cieknące lub uszkodzone baterie/akumulatory mogą powodować poparzenia kwasem w razie kontaktu ze skórą. Należy
używać odpowiedniej odzieży ochronnej.
• Nie wolno ładować baterii jednorazowych. Istnieje ryzyko wybuchu lub pożaru. Należy ładować tylko baterie wielokrotnego
użytku (akumulatory). Do ładowania używać odpowiedniej ładowarki.
• Wkładając baterie lub podłączając akumulator, należy zwrócić uwagę na poprawne podpięcie biegunów. (plus/+ i minus/-).
• Jeśli urządzenie nie będzie używane przez dłuższy czas (np. magazynowanie), należy wyciągnąć baterie (lub akumulatory)
z aparatury, aby zapobiec szkodom wywołanym cieknącymi bateriami.
• Akumulatory NiCd i NiMH należy bezwzględnie ładować co ok. 3 miesiące, aby zapobiec całkowitemu wyładowaniu
związanemu ze zjawiskiem samorozładowania.
• Należy wymieniać całe zestawy baterii lub akumulatorów. Nie należy mieszać naładowanych baterii/akumulatorów z
używanymi. Zawsze używaj baterii tego samego typu i producenta.
• Nigdy nie mieszaj baterii i akumulatorów!
b) Pakiet zasilający
Uwaga!
Po locie pakiet LiPo musi zostać odłączony od elektronicznego systemu Quadrocoptera.
Nie zostawiaj pakietu LiPo podłączonego do systemu elektronicznego Quadrocoptera, gdy nie jest używany (np. podczas
transportu lub składowania). W przeciwnym razie pakiet może się całkowicie rozładować. Może to spowodować
zniszczenie pakietu i jego całkowitą bezużyteczność! Istnieje również ryzyko awarii związane z zakłóceniami. Możliwe
jest przypadkowe uruchomienie silników, co może spowodować uszkodzenia i urazy.
• Nigdy nie ładuj pakietu LiPo bezpośrednio po używaniu. Zawsze pozostaw do ostygnięcia (co najmniej 10-15 minut).
• Do ładowania pakietu LiPo należy stosować ładowarkę LiPo z balaserem.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'8'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
• Ładować należy jedynie sprawne pakiety. Jeśli uszkodzona została zewnętrzna izolacja lub pakiet jest zdeformowany lub
spuchnięty, nie może być ładowany. Może to spowodować ryzyko wybuchu lub pożaru!
• Nigdy nie naruszaj zewnętrznej powłoki pakietu LiPo. Nie przecinaj ochronnej folii. Nie nakłuwaj pakietu ostrymi obiektami.
Powoduje to ryzyko wybuchu lub pożaru!
• W celu naładowania pakiet należy wyciągnąć z Quadrocoptera i umieścić na ognioodpornej podstawie z dala od
łatwopalnych obiektów.
• W trakcie ładowania ładowarka i pakiet LiPo nagrzewają się, dlatego ważne jest zapewnienie odpowiedniej wentylacji. Nigdy
nie przykrywaj ładowarki ani pakietu! Oczywiście dotyczy to każdego rodzaju ładowarki i pakietu.
• Nigdy nie zostawiaj pakietu LiPo bez nadzoru podczas ładowania.
• Odłącz pakiet LiPo od ładowarki w momencie pełnego naładowania.
• Ładowanie może się odbywać wyłącznie w suchych
pomieszczeniach. Ładowarka i pakiet LiPo nie mogą być
zawilgocone ani mokre.
Istnieje zagrożenie śmiertelnym porażeniem
elektrycznym. Akumulator może także spowodować
ryzyko pożaru lub wybuchu. Akumulatory LiPo są
szczególnie narażone na wilgoć ze względu na
substancje chemiczne w ich składzie! Nie narażaj
ładowarki ani baterii LiPo na działanie wysokich/niskich temperatur ani
bezpośrednich promieni słonecznych. Podczas obsługi baterii LiPo
przestrzegaj specjalnych informacji o bezpieczeństwie od producenta
baterii.
8. Montaż Quadrocoptera
a) Składanie nóg podporowych
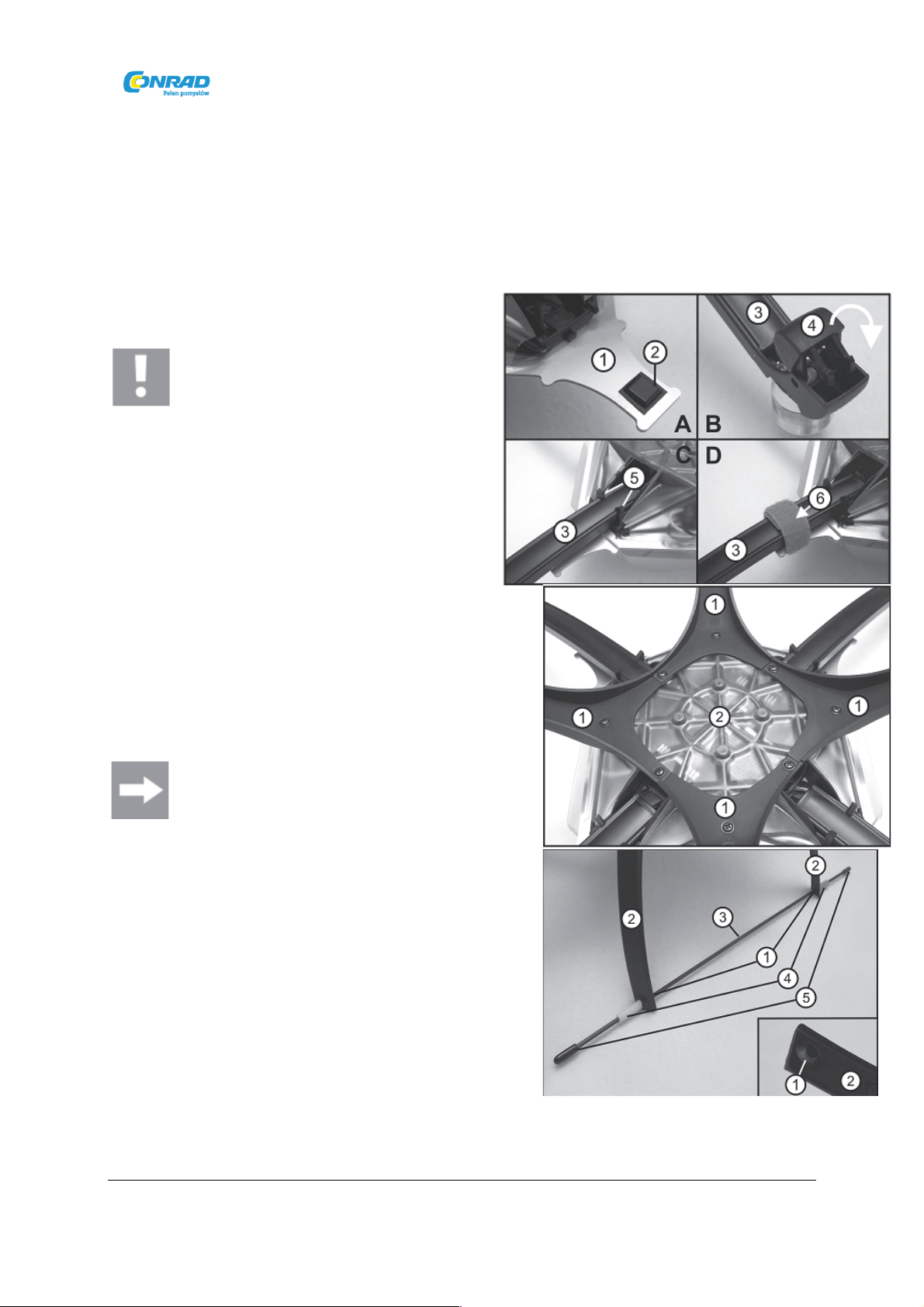
Przymocuj po jednym samoprzylepnym gumowym zderzaku (2) do
czterech końców płyty wzmacniającej podwozia (1), jak pokazano na
zdjęciu 2a, element „A”. Gumowe zderzaki stanowią blokadę dla ramienia
promienistego (3).
Zamontuj końcówki (4) czterech ramion promienistych (3), jak pokazano na
zdjęciu 2a, element “B”, aż do ich zatrzaśnięcia.
Całkowicie rozłóż cztery ramiona promieniste (3) aż do zatrzaśnięcia (5), zob.
zdjęcie 2a, element „C”.
Owiń taśmy rzepowe (6) ciasno wokół ramienia promienistego, zob. zdjęcie 2a,
element “D”. Czerwona taśma rzepowa powinna zostać zamocowana na ramieniu
promienistym ze strzałką kierunkową, aby dodatkowo wskazywać przód
Quadrocoptera.
Dzięki zamocowaniu gumowych zderzaków (zdjęcie 21, element
„A”) oraz taśm rzepowych (zdjęcie 2a, element „D”) połączenie
pomiędzy ramionami promienistymi i częścią główną jest
dodatkowo ustabilizowane. Jednocześnie taki rodzaj połączenia
jest wystarczająco elastyczny do amortyzacji twardych lądowań. Wskazane
pomiary poprawiają także właściwości lotu.
Umieść Quadrocopter do góry nogami na odpowiednim podłożu. Zamocuj cztery
nogi podporowe (1) na spodzie podwozia (2), jak pokazano na zdjęciu 2b. W tym
celu użyj ośmiu śrub z zestawu.
Otwory w plastikowej osłonie podwozia należy ostrożnie wywiercić przed
montażem za pomocą małej wiertarki.
W trakcie montażu sprawdzaj, czy góra nóg podporowych znajduje się na
zewnątrz, a dół po przeciwnej stronie, gdzie powinien znajdować się otwór na
śrubę mocującą.
Zamocuj cztery rękawy gumowe (1) w otworach nóg podporowych (2). Następnie włóż płozy (3) w środek gumowych rękawów (1)
Nasuń krótkie węże silikonowe (4) na płozy (3) od zewnątrz do rękawów gumowych (1). Gumowe rękawy zapobiegają zsuwaniu się
płóz.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'9'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
Nasuń po jednej końcówce (5) na końce płóz (3).
W przypadku zwykłego lotu podany sposób montażu płóz jest wystarczający. W przypadku lotu w trudnych warunkach zaleca się
dodatkowe zabezpieczenie płóz i rękawów gumowych kilkoma kroplami super glue.
Dodatkowe użycie nóg podporowych „Quadrocopter
450”:
Zamiast stosowania podwozia wykorzystanego w
„Quadrocopter 650”, można także użyć nóg
podporowych „Quadrocopter 450”. Nie zawiera ich
zestaw „Quadrocopter 650”, ale można je zamówić jako części
zamienne (zob. listę części zamiennych „Quadrocopter 450”).
Zdjęcie 2d przedstawia nogi podporowe „Quadrocopter 450”.
Rozłóż nogi podporowe (1) do pozycji lotu. Klipsy (2) powinny się
wyraźnie zablokować w otworach (3).
Aby odblokować nóżki, delikatnie pchnij klipsy (2) w otworach (3),
używając niewielkiego śrubokrętu, zwracając uwagę na to, aby nie
uszkodzić plastikowych elementów.
Na jednej z nóżek założony jest czerwony wskaźnik. Powinien on być
traktowany jako kierunek lotu „do przodu”.
Do twardych lądowań nóżki muszą być zawsze
złożone (klipsy zablokowane w otworach).
Aby uniknąć ryzyka niezłożenia nóżek do lotu, można
je zablokować na stałe, używając super glue.
b) Montaż śmigieł
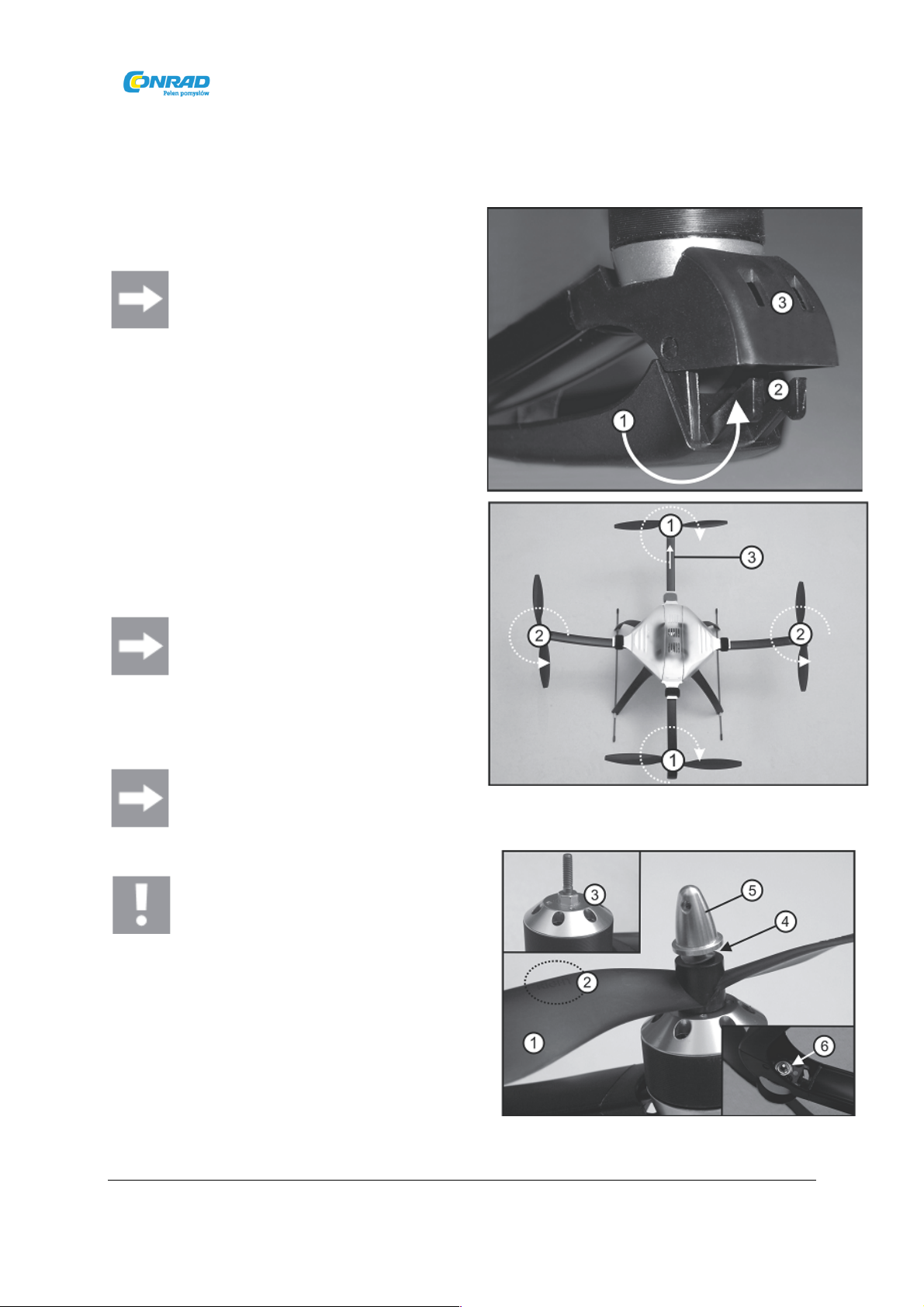
Kierunek obrotu śmigieł widać na sąsiednim zdjęciu (widok z góry).
Strzałka na ramieniu promienistym stanowi wskaźnik kierunku
przedniego modelu.
Uwaga!
W związku z tym, że silniki są wstępnie zmontowane,
należy przestrzegać kierunku obrotu śmigieł na podstawie kierunku lotu (zdjęcie 3)!
Śmigła w linii środkowej (1) obracają się w prawo i muszą być oznaczone napisem „RIGHT”.
Śmigła w osi poprzecznej (2) obracają się w lewo i muszą być oznaczone napisem „LEFT”.
Strzałka na ramieniu promienistym (3) wskazuje przód.
Uwaga!
Jeśli śmigła nie będą zainstalowane zgodnie z opisem,
zaprogramowane kierunki obrotów silnika nie będą zgodne
z kierunkiem obrotów śmigieł. Quadrocopter nie będzie
wówczas zdolny do latania i nie może być używany!
Utrata gwarancji!
Śmigła i wały silników są wyposażone w sześciokątny sworzeń (3).
Umieść śmigła (1) na wałach silnika (3) tak, aby zablokowały się na
sworzniu. Zwróć uwagę na oznaczenia „RIGHT” i „LEFT” śmigieł (2).
Teraz załóż jedną ze sprężynujących podkładek (4) pomiędzy śmigło i
nakrętkę śmigła (5), gdyż w przeciwnym razie śmigła mogą się
zluzować w czasie lotu.
Dokręć nakrętki śmigieł do wałów silników, używając małego długopisu
lub śrubokrętu.

!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'10'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
Dokręcenie nakrętek zbyt mocno moż e uszkodzić silniki. Wały mogą zostać urwane lub odłączone od podstawy. Silniki mogą pracować
opornie, co będzie miało negatywny wpływ na właściwości lotu. Należy więc sprawdzić, czy po dokręceniu śmigła luźno się kręcą.
Pierścień sprężynujący na zdjęciu 4, element 6 musi być ruchomy i nie może się zaciąć.
Upewnij się, że przed każdym lotem śmigła są odpowiednio umocowane na wałach silników. Podczas pracy z narzędziami należy
zachować szczególną ostrożność.
c) Montaż odbiornika
Odbiornik jest podłączony do gniazda „X13” płyty combi (1). W zestawie Quadrocoptera
znajduje się odpowiedni kabel łączeniowy (2). Gniazdo „X13” ma 10 styków ponumerowanych
od prawej do lewej.
Styk 10 znajduje się po lewej, a styk 1 po prawej.
Styki są przydzielone w następujący sposób:
Styk 10 = kanał 1
Styk 9 = kanał 2
Styk 8 = kanał 3
Styk 7 = kanał 4
Styk 6 = kanał 5
Styk 5 = kanał 6
Styk 4 = kanał 7 Zdjęcie 5
Styk 3 = kanał 8
Styk 2 = 5 V/DC/plus (+)
Styk 1 = uziemienie/minus (-)
Sygnały 8 wejść (kanałów 1-8) są mierzone i przetwarzane przez konwerter sygnału całkowitego. Wszystkie dostępne sygnały są
łączone w sygnał całkowity zgodnie ze specyfikacją systemów zdalnego sterowania (szerokość impulsu między 1 a 2 ms). Ze względu
na pomiar i przetwarzanie sygnału występuje opóźnienie długości jednej wręgi. Nie ma to jednak znaczenia podczas obsługi, dlatego
jest o tym mowa tylko w celu podania pełnych informacji.
Zmierzone sygnały serwo mogą pojawić się w dowolnej kolejności, równolegle, po kolei lub nachodzić na siebie. Nie ma ograniczenia,
więc konwerter sygnału całkowitego może być używany we wszystkich standardowych systemach. Niewymagana jest również przerwa
synchronizacji między różnymi sygnałami.
Do zasilania odbiornika wystarczy podłączyć styki 1 (minus/-) i 2 (plus/+) do jednego kabla łączeniowego serwo.
Ważne!
Pamiętaj, że konwerter sygnału całkowitego jest przydzielony bez przerw! W systemie 6-kanałowym oznacza to wejścia 16, a nie 1-4, a następnie 6 i 7. Przy takim przydziale elektronika nie rozpozna kanału 6 i 7!
Ze względu na wiele rozmiarów i konstrukcji odbiornika zdalnego sterowania dostępnych na rynku nie można podać
konkretnych informacji o montażu odbiornika. W zależności od użytego odbiornika możesz go zainstalować albo między
płytkami drukowanymi w ramie kratowej albo na płycie wzmacniającej.
Jeżeli konieczna jest zmiana pozycji płytki drukowanej w ramie kratowej w celu montażu odbiornika, zaleca się montaż
głównej płytki drukowanej żyroskopu dokładnie w środku dla zapewnienia najlepszych właściwości lotu (znajduje się na
małej, wystającej płytce drukowanej).
d) Montaż pakietu zasilającego
Akumulator nie jest zawarty w zestawie. Aby zamontować pakiet, należy
wykonać następujące kroki:
Przylutuj wysokoenergetyczny system ładowania do kabla łączeniowego
akumulatora. Zwróć uwagę na właściwą biegunowość.
Czerwony przewód elektroniki Quadrocoptera musi być połączony z dodatnim
przewodem akumulatora, a czarny przewód Quadrocoptera z ujemnym
przewodem akumulatora.
Umieść akumulator (1) na ramie (2) i przymocuj go taśmami rzepowymi (3).
Dodatkowo przymocuj pas rzepa do powierzchni baterii (4 – jak w zestawie), aby
zapobiec jej przesuwaniu w przód i w tył. Kable łączeniowe można również
zamocować pod taśmą rzepową (3), jak pokazano na zdjęciu.
Pakiet musi być ustawiony w centrum, aby Quadrocopter posiadał
odpowiednio rozłożony środek ciężkości. Zdjęcie 6
W płytce wzmacniającej podwozia (2) znajduje się otwór przeznaczony na
przewód anteny (5). Możesz jej użyć w celu wyprowadzenia anteny odbiornika
na zewnątrz.
Układ elektroniczny Quadrocoptera ma system bezpieczeństwa zapobiegający nieumyślnemu uruchomieniu silników. W momencie
połączenia z pakietem, pomimo niewłączenia nadajnika i/lub ustawienia drążka sterowego prędkości w pozycji zero, elektronika nie
pozwoli uruchomić silników.
Kiedy nadajnik jest włączony i drążek sterowy prędkości jest w pozycji zero, elektronika modelu czyści normalny tryb pracy.

!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'11'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
Uwaga:
Aby zapobiec nieumyślnemu uruchomieniu silników w momencie gdy zabezpieczenie zawiedzie należy włączyć nadajnik i
ustawić drążek sterowny prędkości na zero zerując w ten sposób sygnał wymuszenia przyspieszenia.
e) Montaż górnej osłony
W związku z tym, że osłona posiada otwór na antenę, jest tylko jedna możliwa
pozycja montażu górnej osłony.
Przymocuj górną osłonę (1) gumkami (2), jak pokazano na zdjęciu 7.
Gumki należy wsunąć pod ramiona promieniste płyty wzmacniającej z przodu i
z tyłu.
Osłonę należy zamocować tak, aby otwór na przewód anteny (3) znajdował
się nad otworem w płytce wzmacniającej (zob. poprzedni rozdział).
Zdjęcie 7
9. Sprawdzenie konfiguracji
a) Informacje ogólne
Konfigurację Quadrocoptera należy przeprowadzić zgodnie z opisem w tym
rozdziale. Rozpoznawanie kanałów jest niezbędne, ponieważ w przeciwnym
wypadku model nie będzie reagował prawidłowo na polecenia aparatury zdalnego sterowania. Po przeprowadzeniu konfiguracji
Quadrocopter jest gotowy do lotu.
Jeżeli korzystasz ze sterowania komputerowego, zaprogramuj je bez użycia miksera w standardowym programie.
Aby poprawnie zestroić drążek sterowy do wybranych poleceń, konieczne jest zaprogramowanie Quadrocoptera z używanym
nadajnikiem. Podczas tego procesu elektronika Quadrocoptera zapamiętuje, który kanał kontrolera wydaje poszczególne polecenia.
Konfiguracja może być dowolna (zgodnie z przyzwyczajeniami), jednak początkującym użytkownikom sugeruje się zastosowanie
domyślnych ustawień.
Fabrycznym ustawieniem Quadrocoptera jest „tryb 2”. Przykłady prezentują popularny przydział używany przez wielu pilotów modeli.
Zdecyduj, którą konfigurację chcesz przeprowadzić, i rozpocznij proces rozpoznawania kanałów odpowiedni dla danego wyboru. Dalsze
konfiguracje trybu sterowania 1, 3 lub 4 (tryb 1, 3 lub 4) można odnaleźć w instrukcji w bieżącym rozdziale w podpunkcie „Tryby
sterowania”.
Do monitorowania konfiguracji, wskazania błędów i trybu działania wykorzystywane są diody LED na płytce sterującej – zielona i
czerwona. Wskazania można przejrzeć w bieżącym rozdziale w podpunkcie „Zabezpieczenia”.
Jeśli wykorzystywana będzie więcej niż jedna aparatura, protokoły serwa muszą być zaadaptowane do wszystkich 4
funkcji (throttle, roll, pitch, yaw) od „MPX” do „UNI”.
Jeżeli niemożliwe jest zaprogramowanie Quadrocoptera na Twoim pilocie, może to być wynikiem odwróconej funkcji pilota.
Zaleca się naciśnięcie przełącznika odwrotu funkcji „throttle” i ponowienie próby zaprogramowania.
b) Programowanie kanałów nadajnika (ogólne)
Przed rozpoczęciem procesu programowania należy odłączyć od
Quadrocoptera akumulator zasilający. Należy również odłączyć kabel danych
PC, jeśli jest podłączony.
Użyj zworki do skonfigurowania ustawień RC w pozycję „R2” do ustawienia
zdalnego (5). Styki wtyczki do zworki znajdują się w prawej górnej części z tyłu
tablicy sterowniczej Quadrocoptera.
Po jednej stronie tablicy (1) znajdują się dwie diody LED (2) sygnalizujące status
działania. Po drugiej stronie tablicy (3) można znaleźć styki „S1, S2, R1, R2” (4)
do ustawienia zworką.
Aby Quadrocopter działał w trybie ustawienia zdalnego, przełącz zworkę w
pozycję „R2” (5), jak na zdjęciu 8. To ustawienie jest niezależne od wszystkich
innych ustawień zworek.
Ważne!
Przed włączeniem transmitera drążek „throttle” musi być
ustawiony w pozycji „silnik wyłączony”, a wszystkie dźwignie/suwaki w pozycji neutralnej. W przeciwnym razie nadajnik
może nie zostać rozpoznany po podłączeniu akumulatora.
Teraz należy włączyć nadajnik i całkowicie wysunąć składaną antenę systemu zdalnego sterowania 27/40 MHz.
Ponownie upewnij się, że wszystkie przełączniki są w pozycji neutralnej.
Przykład przedstawia procedurę ustawiania 2 trybu konfiguracji sterowania.
Jeśli wolisz inne ustawienie, użyte osie mogą się różnić (zob. rozdział „Tryby
lotu”)!

!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'12'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
Zwróć też uwagę, czy suwak wyważenia jest ustawiony w pozycji neutralnej! W przeciwnym razie rozpoznanie kanałów nie będzie
możliwe!
Upewnij się, że drążki sterowe są w poprawnym ustawieniu, w przeciwnym razie sygnały mogą być zapamiętane odwrotnie!
Komputerowe zdalne sterowanie powinno być zawsze obsługiwane bez miksera!
Przesuń dźwignię przepustnicy (zob. zdjęcie 9) w tył do pozycji neutralnej (silnik wyłączony). Wszystkie inne element sterowania
powinny być ustawione w pozycji neutralnej.
Jeśli chcesz sprawdzić ustawienie „pitch reverse” (podczas wyłączenia sinika drążek pilota przesunięty maksymalnie od siebie),
przesuń dźwignię przepustnicy maksymalnie w przód zanim podłączysz akumulator.
c) Programowanie komendy „Throttle”
Podłącz naładowany akumulator do Quadrocoptera. Rozpocznie się samotest systemu i w dalszej kolejności programowanie kanałów.
Na podstawie ustawienia przepustnicy Quadrocopter automatycznie rozpoznaje, którego kanału użyć do przepustnicy.
Jako potwierdzenie czerwona dioda LED będzie migać w 2 rytmach (2 krótkie mignięcia, dłuższa przerwa, 2 krótkie mignięcia itd.).
d) Programowanie komendy „Yaw”
Teraz przesuń drążek odpowiedzialny za komendę YAW (zdjęcie 10) w lewo
do oporu i przytrzymaj przez przynajmniej 1 sekundę.
Quadrocopter wykrywa kanał YAW i go zapamiętuje.
Powróć drążkiem YAW z powrotem do pozycji neutralnej, THROTTLE
pozostawiając na zero.
Jako potwierdzenie czerwona dioda LED będzie migać w 3-sekundowym cyklu
(3 krótkie mignięcia, dłuższa przerwa itd.).
Podczas każdego kroku konfiguracji zielona dioda LED
wskazuje kanał podczas wciskania drążka. Jednak
wskaźnikiem postępu jest dioda czerwona!
Podczas programowania pamiętaj, by poruszać tylko wskazanym drążkiem, w
przeciwnym razie ustawienie nie zostanie rozpoznane! Zdjęcie 10
e) Programowanie komendy „Pitch”
Przesuń drążek PITCH (zob. zdjęcie 11) do oporu do GIVE PITCH w górę i
przytrzymaj przez przynajmniej 1 sekundę.
Quadrocopter rozpoznaje komendę PITCH i kanał i zapamiętuje je. Przesuń
dźwignię PITCH z powrotem do pozycji neutralnej, THROTTLE pozostawiając
na zero.
Jako potwierdzenie czerwona dioda LED będzie migać w cyklu
4-sekundowym (4 krótkie mignięcia, dłuższa przerwa itd.).
f) Programowanie komendy „Roll”
Przesuń drążek ROLL (zob. zdjęcie 12) do oporu do ROLL LEFT i przytrzymaj
przez przynajmniej 1 sekundę.
Quadrocopter rozpoznaje kanał ROLL i zapamiętuje go. Przesuń dźwignię
ROLL z powrotem do pozycji neutralnej, THROTTLE pozostawiając na zero.
Jako potwierdzenie czerwona dioda LED gaśnie, a zielona się świeci. To jest
koniec procesu szkoleniowego.
Odłącz akumulator od Quadrocoptera i odłącz zworkę „R2”.
Jeśli włożone są inne zworki, mogą pozostać. To jest koniec procesu
programowania kanałów.
g) Ustawienia trybu lotu
Quadrocopter umożliwia trzy tryby lotu:
• Początkujący (idealny dla nowych pilotów)
• Sport (odpowiedni dla biegłych pilotów Quadrocoptera, niższe limity osi, większa dynamika)
• Użytkownik (parametry lotu ustawiane za pomocą komputera, zob. rozdział „Konfiguracja za pomocą oprogramowania PC”)
Tryb lotu jest konfigurowany przed włączeniem poprzez ustawienie zworek „S1” i „S2” i nie można go zmieniać w trakcie pracy. Zworki
znajdują się na tablicy sterowniczej (zob. też zdjęcie 8 w rozdziale „Programowanie kanałów nadajnika”).
Praktyczna wskazówka:

!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'13'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
Początkującym zaleca się obniżenie czułości komendy sterowania, za pomocą której Quadrocopter wykonuje komendy z pilota wokół
centralnej zapadki (rozkład wykładniczy ujemny „expo”).
Dla zobrazowania:
Standardowo Quadrocopter reaguje na komendy liniowo. To oznacza, że drążek sterujący i reakcja są zsynchronizowane.
Z ujemnym expo Quadrocopter będzie reagował opornie na delikatne ruchy drążka, stopniowo zwiększając czułość im mocniejsze
będzie wymuszenie. Jest to bardzo użyteczne dla początkujących pilotów, którzy mają tendencję do nadsterowania, tj. poruszania
drążkiem sterownym mocniej niż to konieczne. Efekt jest pożądany jedynie dla osi sterujących (ROLL, PITCH, YAW), nie dla
przepustnicy. Dlatego nie konfiguruj „expo” na przepustnicy!
Innymi słowy: Ujemne „expo” spowalnia zachowanie modelu podczas ruchów sterujących w obszarze centralnej zapadki drążka pilota.
Dzieje się tak albo poprzez dodatkowe oprogramowanie, albo zworki (zob. „tryb początkujący”), albo funkcję „expo” aparatury zdalnego
sterowania. Jedynie skomputeryzowane kontrolery mogą ustawiać „expo”. Jednak im wyższa wartość ujemna „expo”, tym
agresywniejsze reakcje modelu w położeniach drążka bliskich położeniom skrajnym.
Poniższe rysunki obrazują różne tryby ustawiane za pomocą zworek. Fabrycznie zworki nie są ustawione, powodując, że model jest w
trybie „początkujący”. Zworki S1 i S2 są niezależne od innych zworek!
Początkujący Sport Użytkownik
Do ustawienia trybu lotu użytkownika niezbędne jest skonfigurowanie własnych ustawień za pomocą oprogramowania.
Aby to uczynić, można wykorzystać wstępne nastawy trybu początkującego lub sportowego i zmodyfikować je według
własnych potrzeb. W tym celu należ y zapoznać się z odpowiednim rozdziałem instrukcji obsługi zestawu
konfiguracyjnego.
h) Konfiguracja za pomocą oprogramowania PC
Aby skonfigurować model za pomocą oprogramowania PC, należy podpiąć model do komputera PC, wykorzystując przewód złącza
(szeregowego TTL do USB).
Do wykonania tego przydatny jest opcjonalny zestaw konfiguracyjny dostępny do kupienia. Zawiera on przewód, szczegółowe instrukcje i
oprogramowanie na płycie CD. Zestawu można używać z
systemem operacyjnym Microsoft® Windows XP®*, Windows
Vista®* i Windows 7®* (* Microsoft, Windows XP, Windows Vista i
Windows 7 są zastrzeżonymi znakami towarowymi Microsoft
Corporation w USA i innych krajach).
Jako że konfiguracja nie jest niezbędna do funkcjonowania modelu
w trybie zwykłego lotu, w niniejszej instrukcji zawarta jest jedynie
wzmianka o takiej opcji. Więcej informacji o konfiguracji znajduje się
w instrukcji obsługi oprogramowania.
Gdy ustawiona jest zworka R1, Quadrocopter jest w trybie
konfiguracji za pomocą komputera PC i nie może być pilotowany.
Aby powrócić do trybu działania modelu, należy wyciągnąć
zworkę!
Na tablicy sterowniczej poniżej diod LED znajduje się
mikroprzycisk, za pomocą którego można
zresetować ustawienia. W tym celu należy nacisnąć
przycisk, gdy podłą czony jest akumulator, i
przytrzymać go przez co najmniej 1 sekundę. Elektronika wykona
wtedy ponowny rozruch i wprowadzi ustawienia zgodne z konfiguracją zworek. Efekt jest taki sam jak po odłączeniu akumulatora.
Mikroprzycisk (1) i złącze (2) znajdują się na tablicy sterowniczej (3). Dla celów poglądowych wyciągnięta płytka jest pokazana na
zdjęciu 13.
i) Tryby lotu
Tryb Throttle Yaw Pitch Roll

!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'14'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
10. Przed każdorazowym użyciem
a) Sprawdzenie połączeń
Sprawdź wszystkie śruby przed transportem i lotem. Drgania pojawiające się podczas transportowania modelu bądź latania mogą
spowodować poluzowanie śrub. Z tego powodu przed każdym lotem konieczna jest inspekcja.
b) Sprawdzenie ruchomych elementów
Zawsze należy sprawdzić wszystkie elementy ruchome i elementy z łożyskami pod kątem niepożądanych ruchów. Muszą ruszać się
swobodnie, ale nie mogą mieć luzów.
c) Regulacja pozycji neutralnej
Aby stabilizacja Quadrocoptera funkcjonowała prawidłowo, niezbędne jest ustawienie pozycji neutralnej. Jest to pozycja, przy której
model usiłuje ustabilizować lot do momentu otrzymania polecenia sterującego.
Postępuj zgodnie z następującą procedurą:
1) Włącz nadajnik.
2) Ustaw THROTTLE na zero, a wszystkie inne przełączniki i drążki w pozycji neutralnej.
3) Ustaw model na równej, płaskiej powierzchni!
4) Podłącz akumulator do Quadrocoptera.
5) Czerwona dioda LED musi być wyłączona, zielona włączona.
6) Przesuń THROTTLE do oporu, a YAW do oporu w prawo (zdjęcie 14).
7) Zielona dioda LED Quadrocoptera miga, potwierdzając zapamiętanie pozycji neutralnej.
8) Przesuń THROTTLE ponownie na zero, ustaw YAW, PITCH i ROLL w pozycji neutralnej.
9) Czerwona dioda LED jest wyłączona, zielona włączona. Model jest gotowy do lotu! Zdjęcie 14
Jeżeli nie ustawisz pozycji neutralnej, model wykorzysta ustawienia fabryczne lub ostatnie
zapamiętane wartości!
Bardzo ważne jest, aby neutralna pozycja Quadrocoptera była możliwie
najdokładniejsza. Z tego powodu niezbędne jest ustawienie go na całkowicie poziomym obszarze. Do sprawdzenia tego
idealnie nadaje się poziomica.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'15'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
W związku z różnymi warunkami otoczenia odmiennymi od fabryki i/lub faktycznego miejsca lotu, ustawienia fabryczne mogą nie być
idealne! Ustawienie neutralnej pozycji przed pierwszym lotem jest dlatego bardzo ważne. Jeśli model ma tendencje do odchylania się w
którąś stronę pomimo ustawień aparatury, pozycja neutralna musi zostać ponownie skalibrowana przy jednoczesnym lekkim uniesieniu
Quadrocoptera po stronie, w którą się odchyla. W ten sposób (zmodyfikowana) pozycja jest obrana jako nowa pozycja centralna.
11. Zabezpieczenia
W Quadrocopterze zastosowano szereg elementów zabezpieczających model przed uszkodzeniem bądź minimalizujących potencjalne
szkody. Mechanizmy ochronne są wskazywane przez wskaźniki LED. Aby to sprawdzić, należy przejść do rozdziału 12 „Wskaźniki
LED”.
a) Zabezpieczenie silnika
Elektronika sterująca posiada zabezpieczenie natychmiast wyłączające wszystkie silniki w momencie, gdy któreś śmigło jest
zablokowane (np. po wypadku). Po sprawdzeniu potencjalnych szkód silniki mogą zostać uruchomione ponownie przy użyciu procedury
uruchomienia silników.
b) Lądowanie awaryjne
Jeśli elektronika Quadrocoptera wykrywa zbyt duże turbulencje, próbuje ustawić model w poziomej pozycji.
Jeśli turbulencje odbiornika powtarzają się, przepustnica jest ustawiana na wartość minimalnie poniżej zawiśnięcia (bez dodatkowego
obciążenia) i Quadrocopter zaczyna opadać.
Gdy turbulencje miną, pilot może przejąć kontrolę za pomocą aparatury, a tryb awaryjnego lądowania jest przerywany.
c) Monitorowanie niskiego napięcia
Model stale monitoruje napięcie podłączonego pakietu zasilającego. Jeśli spadnie ono poniżej wartości krytycznej w pewnym przedziale
czasowym, wskażą to diody LED.
W takim wypadku czerwona dioda LED miga, a zielona się pali. Wskazanie może zostać wyłączone jedynie przez odłączenie pakietu.
Aby wykryć niski stan pakietu podczas lotu, zaleca się od czasu do czasu wykonać silny ruch przepustnicy. Jeśli reakcja Quadrocoptera
będzie wolna i słaba, należy wylądować i sprawdzić stan baterii. Z powodu osiągów test jest trudny do wykonania.
W razie długich, niezakłóconych lotów zalecane jest sprawdzenie wskaźników LED przez regularne lądowanie.
Praktyczna rada: Aby uniknąć uszkodzeń Quadrocoptera w wyniku rozbicia z powodu niskiego napięcia i/lub uszkodzeń akumulatora z
powodu pełnego wyładowania, zaleca się uważne śledzenie sygnałów LED wskazujących na niskie napięcie. Jako że wskaźnik
informuje jedynie o niskim stanie pakietu, zaleca się zakup i montaż dodatkowego wskaźnika ostrzegawczego LiPo (nr produktu:
230327).
Dioda ostrzegawcza informuje o nadchodzącym niskim napięciu za pomocą sygnału świetlnego. Wskaźnik należy zamontować w
odpowiednim miejscu Quadrocoptera i podpiąć do pakietu, np. przez połączenie wyrównawcze.
d) Funkcja odnajdywania
W przypadku braku sygnału nadajnika lub jego wyłączenia, włączony Quadrocopter automatycznie wydaje sygnał dźwiękowy (brzęczy).
W razie lądowania w wysokiej trawie lub polu kukurydzy można go więc łatwo znaleźć.
12. Wskaźniki LED
Następujące wskaźniki LED nie są wskaźnikami bezpieczeństwa, lecz informują o konkretnym statusie.
Diody znajdują się na tablicy sterowniczej (zob. zdjęcie 8).
a) Gotowy do lotu
Po podłączeniu akumulatora i przed uruchomieniem silników zielona dioda LED jest zapalona, a czerwona zgaszona. Quadrocopter jest
gotowy do lotu. Jeśli diody nie zapalają się zgodnie z opisem, występuje zakłócenie. Postępuj zgodnie z wytycznymi w tym rozdziale.
b) Uruchomienie Quadrocoptera
Obróć silniki. Czerwona dioda LED zapala się na stałe, zielona miga. Po około 2 sekundach zielona dioda też zapala się na stałe. Jeśli
tak się nie dzieje, występuje zakłócenie. Postępuj zgodnie z wytycznymi w tym rozdziale.
c) Tryb konfiguracji
Podczas konfiguracji aparatury zdalnego sterowania czerwona dioda LED wskazuje etap programu, a zielona – kanał do
zaprogramowania poprzez odpowiednie miganie z przerwami.
d) Regulacja uchybu zdalnego sterowania
Po podłączeniu akumulatora czerwona i zielona dioda LED migają szybko, wskazując synchronizację nadajnika i systemu
elektronicznego Quadrocoptera. Po udanej synchronizacji czerwona dioda LED gaśnie, a zielona zapala się na stałe.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'16'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
e) Dostosowanie pozycji neutralnej
Jeśli przeprowadzana jest regulacja pozycji neutralnej, zielona dioda LED szybko miga. Czerwona dioda LED jest wyłączona.
Wymienione niżej wskazania LED stanowią wskaźniki bezpieczeństwa. Przyczyny uruchomienia sygnalizacji należy zbadać i
usunąć.
f) Zakłócenia radiowe przed startem
Podczas próby startu silniki są nadal wyłączone. Czerwona i zielona dioda LED migają powoli w tym samym czasie, wskazując na
wadliwe połączenie radiowe.
Możliwe przyczyny: Kwarc odbiornika wypadł z podstawy, kwarc nadajnika jest uszkodzony, antena odbiornika jest ułamana/przerwana.
Antena nadajnika nie jest wyciągnięta, drugi nadajnik jest uruchomiony na tym samym kanale, baterie nadajnika są wyczerpane. Sprawdź
przyczynę błędu i zrestartuj połączenie.
Jeśli wystąpią stałe zakłócenia w transmisji radiowej podczas lotu, Quadrocopter uruchomi procedurę lądowania awaryjnego, a diody
zaczną wskazywać błąd połączenia radiowego, migając jednocześnie.
g) Zakłócenia radiowe podczas lotu
Podczas próby startu silniki są już włączone lub w trybie lotu. Czerwona i zielona dioda LED jednocześnie powoli migają, wskazując na
wadliwe połączenie radiowe.
Możliwe przyczyny: Kwarc odbiornika wypadł z podstawy, kwarc nadajnika jest uszkodzony, antena odbiornika jest ułamana/przerwana.
Antena nadajnika nie jest wyciągnięta, drugi nadajnik jest uruchomiony na tym samym kanale, baterie nadajnika są wyczerpane. Sprawdź
przyczynę błędu i zrestartuj połączenie.
Jeśli wystąpią stałe zakłócenia w transmisji radiowej podczas lotu, Quadrocopter uruchomi procedurę lądowania awaryjnego, a diody
zaczną wskazywać błąd połączenia radiowego, migając jednocześnie.
h) Funkcja lądowania awaryjnego
Podczas lotu występują stałe zakłócenia radiowe. Quadrocopter automatycznie rozpoczyna procedurę lądowania awaryjnego. Czerwona
i zielona dioda LED jednocześnie powoli migają. Należy szukać przyczyny wśród powyższych.
i) Monitorowanie niskiego napięcia
Stan naładowania baterii jest sprawdzany na bieżąco. W razie przekroczenia określonej wartości napięcia (próg ok. 9,4 V),czerwona
dioda LED zaczyna szybko migać. Zielona dioda LED jest zapalona na stałe. To wskazanie może zostać zresetowane jedynie przez
odłączenie pakietu. Jeśli miga czerwona dioda LED, jak najszybciej wyląduj i wyreguluj tryb lotu.
Jeśli Quadrocopter zostanie podłączony do nie w pełni naładowanego pakietu, może to
spowodować wykrycie zbyt małego napięcia. W takim wypadku należy naładować pakiet i
ponownie spróbować wystartować modelem.
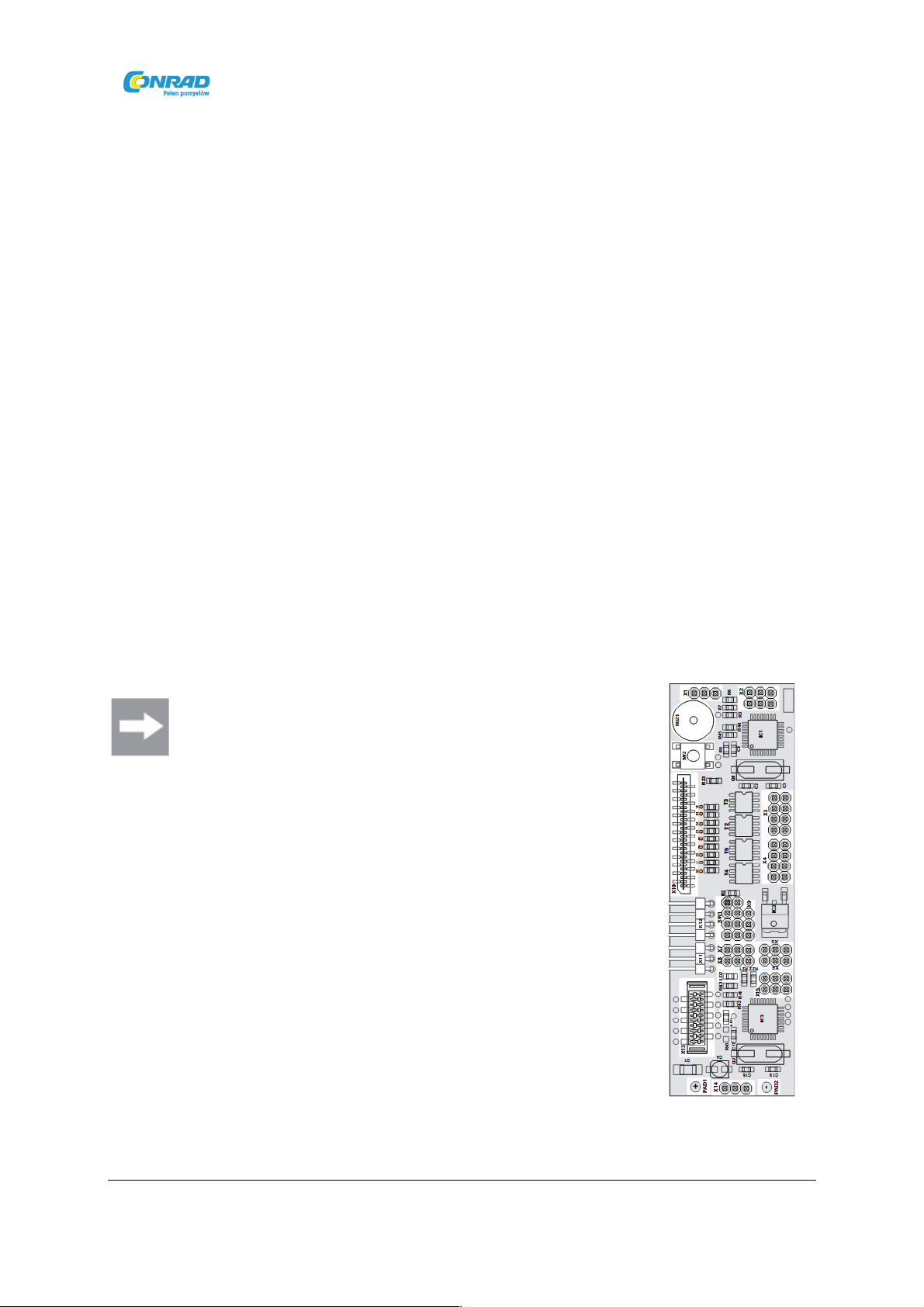
13. Informacje o płycie combi „QC08”
a) Styki i zworki płyty combi
PAD1: Dodatnie połączenie lutowane zasilania (+)
PAD2: Ujemne połączenie lutowane zasilania (-)
LD1: Zielony wskaźnik LED
LD2: Czerwony wskaźnik LED
X1: Zworka brzęczyka
X2: Zworka trybu światła
X3: Styki do diody LED lub paska LED 1-4
X4: Styki do diody LED lub paska LED 5-8
X5: Styki do serwo 1 (kanał 5)
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'17'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
X6: Styki do serwo 2 (kanał 6)
X7: Styki do serwo 3 (kanał 7)
X8: Styki do serwo 4 (kanał 8)
X9: Styki do zewnętrznego sygnału wejściowego zdalnego sterowania
X10: Łączówka do kabla złącza płyty
X11: Zworka do wyboru złącza
X12: Złącze szeregowe
X13: Gniazdo do kabla odbiornika
X14: Styki do sygnału całkowitego
X15: Wtyczka programowania do ustawień producenta
SW1: Zworka do wyboru wejścia zdalnego sterowania
SW2: Przycisk Reset
BUZ1: Brzęczyk
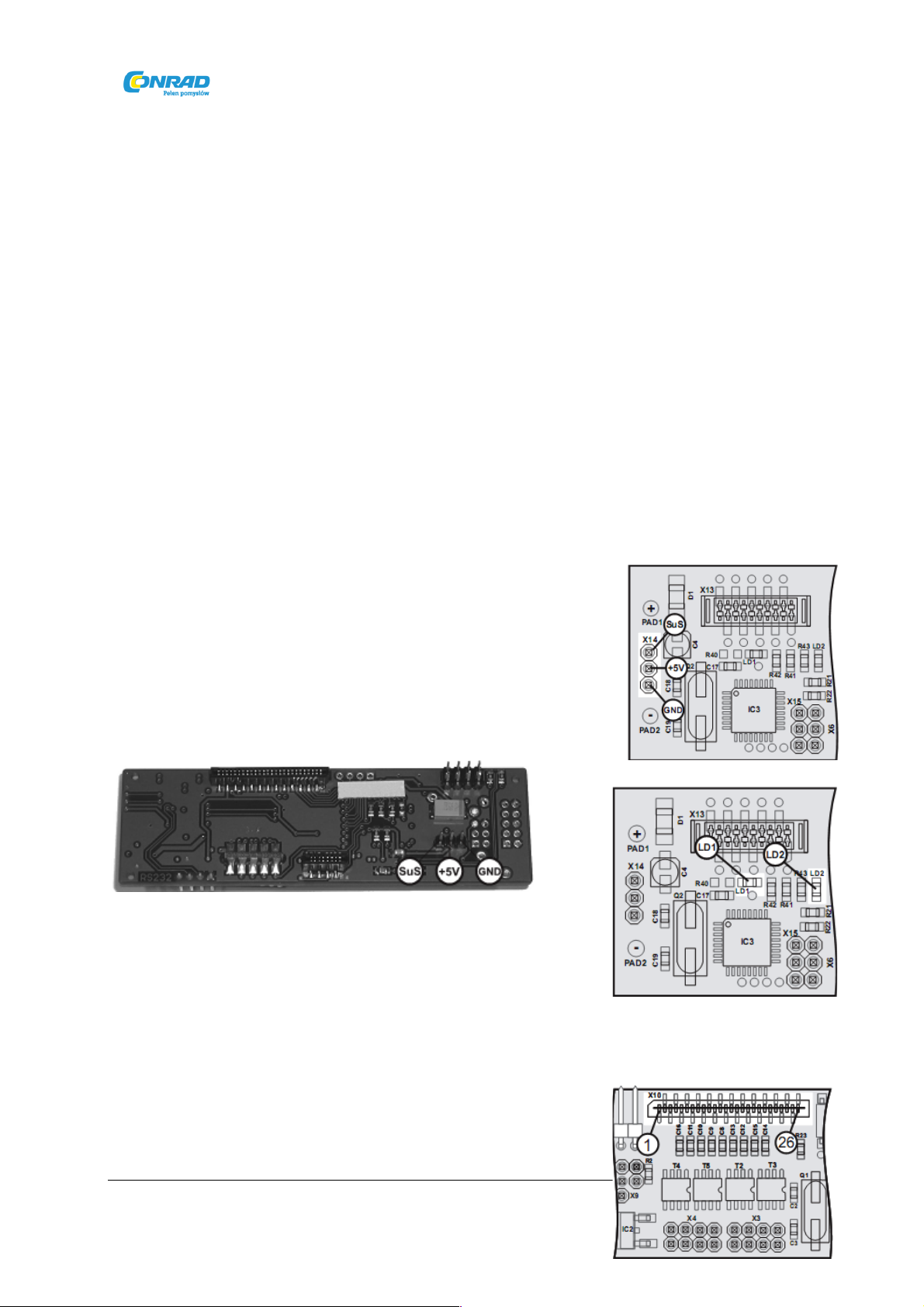
b) Wyjście sygnału całkowitego
Konwerter sygnału całkowitego generuje utworzony sygnał całkowity (SuS) na górnym styku
połączenia „X14”.
Sygnał całkowity składa się z tylu pojedynczych sygnałów, ile zmierzono przy wejściach.
Na przykład, w przypadku stosowania 6-kanałowego odbiornika sygnał całkowity ma również 6
kanałów.
Rozpoznanie liczby kanałów jest dokonywane przez pomiar sygnału na wejściach.
Połączenia “SuS”, “+5V” i “GND” muszą być podłączone do odpowiednich połączeń głównej
płytki drukowanej (zdjęcie 16b) Quadrocoptera.
Zwróć uwagę na właściwą biegunowość dwóch nakładek stykowych.
c) Wskaźnik statusu LED
Konwerter sygnału całkowitego posiada zieloną i czerwoną diodę LED do wskazywania
statusu.
Zielona dioda LED (LD1) wskazuje prawidłowe działanie elektroniki. To oznacza możliwość pomiaru sygnału serwo, a w razie
konieczności – wytworzenia sygnału całkowitego.
Jeżeli zielona dioda LED gaśnie, występuje podstawowe zakłócenie w elektronice.
Czerwona dioda LED (LD2) wskazuje brak sygnałów serwo. Przyczyną może być zakłócenie odbioru, brak zasilania odbiornika,
wyłączony nadajnik lub błędy w stykach przewodów łączeniowych.
Postępowanie w razie zakłóceń odbioru

!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'18'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
Konwerter sygnału całkowitego mierzy jakość sygnału, a tym samym wykrywa zakłócenia odbioru.
W związku z tym, że kanały 1-4 są głównie używane go ogólnego sterowania modelem, są szczegółowo opisane.
Zakłócenia na kanałach 1-4
W przypadku tych kanałów wykonuje się weryfikację szerokości impulsu (między 1 i 2 ms). W razie wykrycia błędu sygnał całkowity jest
generowany z ostatnią prawidłową wartością.
Jeżeli tempo błędów przekracza pomiar do poprawnego odbioru, konwerter sygnału całkowitego nie wydaje sygnału całkowitego i
włącza się czerwona dioda LED. Wówczas problem z odbiorem może zostać wykryty przez układ logiczny downstream, a problemy z
odbiorem nie są ukryte.
Jeżeli sygnał wejściowy jest znów poprawny, czerwona dioda LED gaśnie i generowany jest sygnał całkowity.
Zakłócenia na kanałach 5-8
Jeżeli zakłócenie odbioru dotyczy jedynie kanałów 5-8, sygnał całkowity jest nadal generowany na kanałach 1-4, a kanały 5-8 mają
nieprawidłową szerokość impulsu.
Dlatego możliwe jest dalsze sterowanie modelem, ale zakłócenie może zostać wykryte
przez układ logiczny downstream na kanałach 5-8.
Jeżeli sygnał wejściowy jest znów poprawny, generowany jest zwykły sygnał
całkowity.
d) Połączenie złącza
W celu podłączenia płyty combi do tablicy sterowniczej Quadrocoptera, płyta combi
posiada 26-drutowy przewód kablowy, który należy podłączyć do łączówki do kabla
złącza płyty („X10”).
Następnie, podczas instalacji płyty combi w Quadrocopterze, zwróć uwagę, czy dwie
łączówki do kabla złącza płyty (płyty combi i tablicy sterowniczej) są dokładnie w
poprzek siebie.
Połączenie wykonuje się tak samo, jak połączenie między płytami sterowników silnika
i tablicą sterowniczą.
e) Połączenie serwo
Jeżeli płyta combi jest zamontowana w Quadrocopterze, a zdalne sterowanie zaprogramowane, można podłączyć i sterować nim do
czterech serwo (kanały 5-8).
Jest to jednak możliwe tylko wówczas, gdy nadajnik i odbiornik posiadają te funkcje, a odpowiednie wyjścia odbiornika są podłączone do
gniazda wejściowego konwertera sygnału całkowitego („X13”).
Do połączenia serwo przeznaczone są następujące styki gniazda:
X5: serwo 1 (wyjście odbiornika/kanał 5)
X6: serwo 2 (wyjście odbiornika/kanał 6)
X7: serwo 3 (wyjście odbiornika/kanał 7)
X8: serwo 4 (wyjście odbiornika/kanał 8)
Zwróć uwagę, czy przewód impulsów (PPM) jest zawsze podłączony do górnego wtyku trzech gniazd podczas podłączania
serwo!
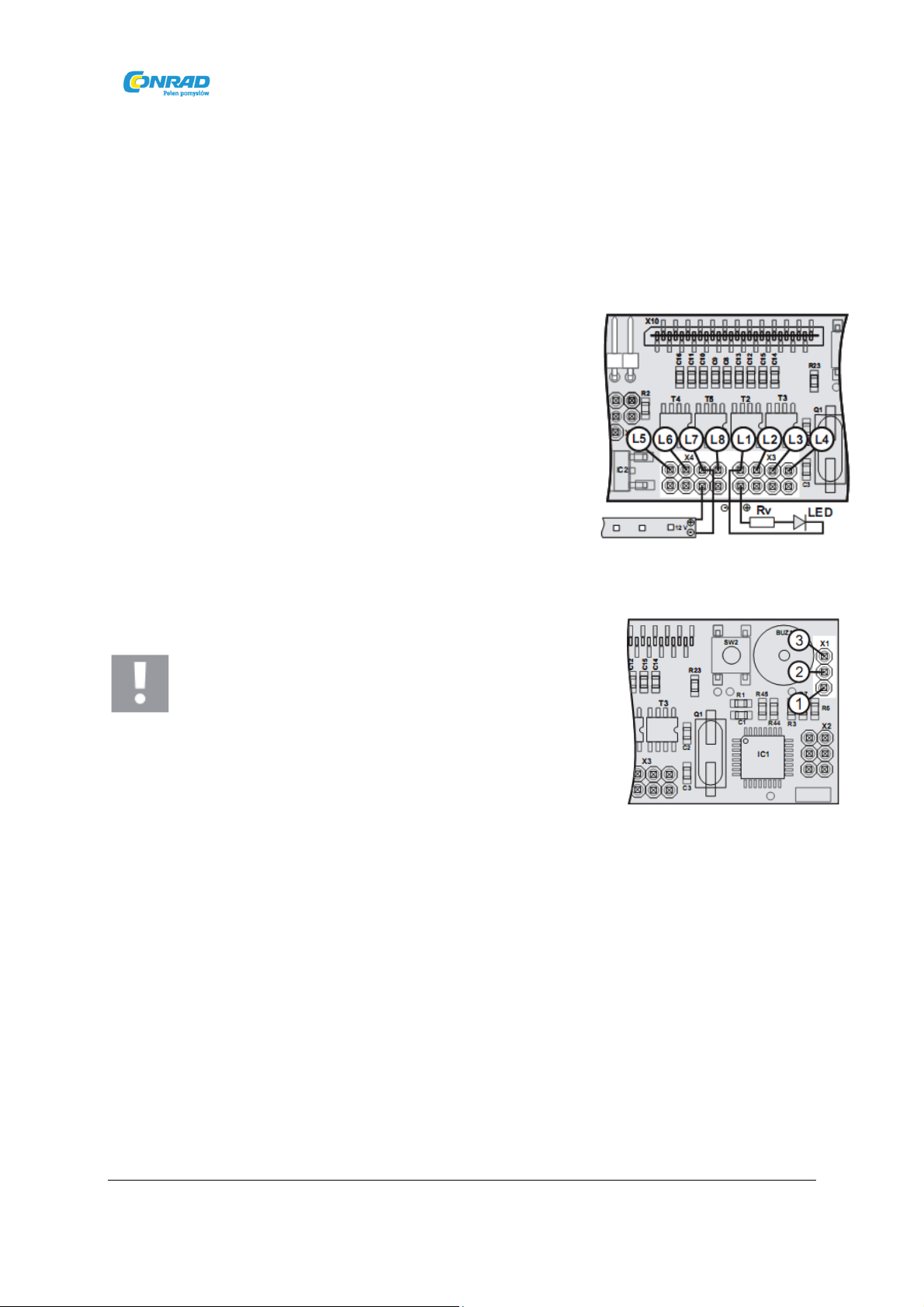
14. Funkcja światła i dźwięku
a) Informacje ogólne
Płyta combi posiada osiem wyjść LED („L1” do „L8”) i trzy wejścia cyfrowe („IN-1”, „IN-2”, „IN-3”) oraz zewnętrzne wejście zdalnego
sterowania („PPM”) poza konwerterem sygnału całkowitego.
Uruchamianie wyjść LED można skonfigurować przez 7 różnych trybów.
Elektronika albo generuje stały wzór na wyjściach, albo wyjścia są włączane w zależności od sygnałów wejściowych. Zworek można
użyć do ustawienia trybów, które można również przełączyć na trzy statusy za pomocą sygnału zdalnego sterowania (kanały 5, 6, 7, 8
lub zewnętrzne). Tym samym istnieje możliwość przełączania w locie.
Wejścia cyfrowe:
Wejścia cyfrowe włączają odpowiednie wyjścia, jeżeli wybrano właściwy tryb. Wysoki sygnał (+5 V) oznacza, że wyjście jest włączone.
Podłączona dioda LED lub pasek LED się zaświeca.
Trzy wejścia cyfrowe znajdują się na połączeniu złącza „X10” i są przydzielone w
następujący sposób:
IN-1 = styk 6
IN-2 = styk 5
IN-3 = styk 16
Dzięki 3 wejściom cyfrowym mogą się wyraźnie wyświetlać informacje
o różnych statusach lub komunikaty o błędach Quadrocoptera. Funkcja
sygnałów wejścia zależy głównie od użytego oprogramowania

!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'19'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
sprzętowego i można ją zmienić podczas dalszej rozbudowy Quadrocoptera. Bardziej szczegółowy opis z przydziałami 3
wejść cyfrowych znajduje się w pliku tekstowym oprogramowania sprzętowego.
Wejście zdalnego sterowania:
Za pomocą wejścia zdalnego sterowania możesz przełączyć każdy tryb światła w trzy różne statusy włączenia. Użyj przełącznika na
nadajniku w pozycji centralnej (wysoko, neutralnie, nisko), suwaka lub pokrętła. Do przełączania trybu światła możesz użyć kanałów 58 lub zewnętrznie zasilanego sygnału serwo (PPM).
W związku z 7 różnymi trybami pojawiają się następujące wzory świetlne:
Znaczenie skrótów:
SB: Miga wolno (400 ms wł., 400 ms wył.)
FB: Miga szybko (200 ms wł., 200 ms wył.)
SF: Pojedyncze mignięcie (50 ms, przerwa 1 s)
DF: Podwójne mignięcie (50 ms, 50 ms, przerwa 1 s)
Bat: Ostrzeżenie o baterii na 5 poziomach (>9,4 V = WYŁ.; <9,4 V = SF; <9,2 V = DF; <9,0 V = SB; <8,8 V = FB)
WB1, WB2: Miganie zmienne (zmiana co 100 ms)
Prędkość biegu jałowego: Zmiana co 100 ms
Tryb PPM L1 L2 L3 L4 L5 L6 L7 L8 Brzęczyk
1 Wysoki IN-1 IN-2 IN-3 DF SF SB DF Bat Bat
Neutralny IN-1 IN-2 IN-3 DF SF SB WYŁ. Bat Bat
Niski IN-1 IN-2 IN-3 DF SF SB WŁ. Bat Bat
2 Wysoki IN-1 IN-2 IN-3 DF SF SB DF Bat IN-3
Neutralny IN-1 IN-2 IN-3 DF SF SB WYŁ. Bat IN-3
Niski IN-1 IN-2 IN-3 DF SF SB WŁ. Bat IN-3
3 Wysoki Bieg jałowy L1 do L8 IN-3
Neutralny WYŁ. IN-3
Niski Bieg jałowy L8 do L1 IN-3
4 Wysoki Odwrócony bieg jałowy L1 do L8 IN-3
Neutralny WYŁ. IN-3
Niski Odwrócony bieg jałowy L8 do L1 IN-3
5 Wysoki Bieg jałowy L1 to L4 IN-1 IN-3 SB Bat IN-3
Neutralny WYŁ. IN-1 IN-3 SB Bat IN-3
Niski Bieg jałowy L4 to L1 IN-1 IN-3 SB Bat IN-3
6 Wysoki Odwrócony bieg jałowy L1 to L4 IN-1 IN-3 SB Bat IN-3
Neutralny WYŁ. IN-1 IN-3 SB Bat IN-3
Niski Odwrócony bieg jałowy L4 to L1 IN-1 IN-3 SB Bat IN-3
7 Wysoki WB1 WB2 IN-1 IN-2 IN-3 SF DF Bat IN-3
Neutralny WB1 WB2 IN-1 IN-2 IN-3 SF WYŁ. Bat IN-3
Niski WB1 WB2 IN-1 IN-2 IN-3 SF WŁ. Bat IN-3
b) Wybór trybu światła
Możesz teraz ustawić 7 trybów światła z wykorzystaniem zworki („X2”). W
zależności od wybranego trybu ze zworką należy połączyć różne styki.
Ustaw poniższe zworki do następujących trybów:
Tryb 1: Brak zworki
Tryb 2: Zworka 1-2
Tryb 3: Zworka 3-4
Tryb 4: Zworka 1-2 i zworka 3-4
Tryb 5: Zworka 1-3
Tryb 6: Zworka 2-4
Tryb 7: Zworka 1-3 i zworka 2-4
c) Wybór wejścia zdalnego sterowania
Wybrane wejście zdalnego sterowania do przełączania efektu światła można ustawić z wykorzystaniem zworki SW1. Zawsze łącz ze
zworką górne i dolne styki.
Przydział jest następujący:
Wybór serwo 1 = kanał 5
Wybór serwo 2 = kanał 6
Wybór serwo 3 = kanał 7
Wybór serwo 4 = kanał 8
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'20'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
Na sąsiednim zdjęciu zworka jest ustawiona na wybór serwo 1. Możesz teraz przełączyć ustawiony tryb światła poprzez nadajnik przez
kanał 5. Sterowanie przez kanały 5, 6, 7 lub 8 jest możliwe tylko wówczas, gdy są one również generowane przez sterowanie główne.
Generowanie sygnału jest niezależne od konwertera sygnału całkowitego! Zdjęcie 22
W przeciwnym przypadku możesz dostarczyć zewnętrzny sygnał serwo (PPM) do lewego styku gniazda „X9” nieprzypisanego wyjścia
odbiornika (np. kanału 9). Jeżeli nie używasz żadnego wejścia zdalnego sterowania i tym samym rezygnujesz z możliwości
przełączania, zawsze będzie aktywny „wysoki” status włączenia PPM!
d) Podłączanie pasków LED/diod LED
Płyta combi umożliwia podłączenie do ośmiu pasków LED o napięciu roboczym 12 V i maksymalnym poborze mocy 1 A/na pasek.
Nawet jeżeli wyjścia łączeniowe MOSFET (FDS6890A) mogą stawić opór do 7,5 A, zaleca się niestosowanie powyżej 1 A na
poszczególnych wyjściach ze względu na układ płyty i chłodzenie.
Jeżeli chcesz podłączyć pojedyncze diody LED o niższym napięciu roboczym wynoszącym
tylko 2-3 V, uwzględnij odpowiedni rezystor szeregowy (Rv). Do wliczenia rezystora
szeregowego użyj napięcia roboczego 12 V, ponieważ świeżo naładowana bateria LiPo o 3
ogniwach może mieć znacznie więcej niż 12 V zamiast 11,1 V.
Przykładowe obliczenie:
Zakładając, że zastosowana dioda świetlna ma napięcie zasilania wynoszące 2,6 V oraz
pobór mocy 20 mA, najpierw należy obliczyć napięcie rezystora szeregowego: 12 V – 2,6 V
= 9,4 V
Jeżeli chcesz włączyć dwie takie same diody pod rząd, należy odjąć 2 x 2,6 V = 5,2 V od
napięcia roboczego12 V (12 V – 5,2 V = 6,8 V)
Przy trzech jednakowych diodach od napię cia roboczego 12 V należy odjąć (12 V – 7,8 V =
4,2 V).
Następnie użyj prawa Ohma R = U : I do obliczenia oporu szeregowego Rv:
Rv = 9,4 V : 0,02 A = 470 Ohm
Użyj również wzoru P = U x I do obliczenia mocy wyjściowej, której rezystor szeregowy musi stawić opór: 9,4 V x 0,02 A = 0,188 W
W tym przypadku wystarczy rezystor o mocy wyjściowej ¼ W (0,25 W). Odpowiednie główne styki gniazda „X3” („L1” do „L4”) i „X4” („L5”
do „L8”) są przeznaczone do podłączenia diod LED/paska LED. Dolne styki są podłączone do połączenia dodatniego (+) baterii
napędowej (11,1 V baterii LiPo).
Wzór połączeń
Zdjęcie 23 przedstawia schemat połączenia diody LED z rezystorem szeregowym na wyjściu „L1”
oraz połączenia paska świetlnego 12 V na wyjściu „L7”.
Ważne!
Podczas podłączania diod LED i pasków LED zwróć uwagę na właściwą
biegunowość przewodów.
W praktyce do podłączania diod LED sprawdzają się prefabrykowane gniazda BEC
z otwartymi końcami kabla.
e) Konfiguracja brzęczyka
Brzęczyk można włączać i wyłączać za pomocą zworki („X1”).
Jeżeli styki 1 i 2 są połączone ze zworką, brzęczyk jest wyłączony.
Jeżeli styki 2 i 3 są połą czone ze zworką, brzęczyk jest włączony i wydaje sygnał zgodnie z
tabelą trybów.
15. Połączenie PC płyty combi
Płyta combi posiada złącze szeregowe jak tablica sterownicza Quadrocoptera. Elektronika może łączyć się przez złącza z
komputerem.
Za pomocą zworki „X11” złącze szeregowe płyty combi może albo łączyć się z tablicą sterowniczą Quadrocoptera (drugie złącze
wewnętrzne) poprzez 26-rdzeniowy kabel złącza, labo zostać włączone do połączenia złącza „X12”.
Ta funkcja służy późniejszemu rozbudowaniu i obecnie nie działa. Jeżeli styki 1 i 2 są połączone ze zworką, złącze tablicy sterowniczej
Quadrocoptera jest włączone.
Jeżeli styki 2 i 3 są połączone ze zworką, złącze płyty combi („X12”) jest włączone.
Przydział wtyków gniazda złącza „X12” jest przedstawiony na zdjęciu 25.
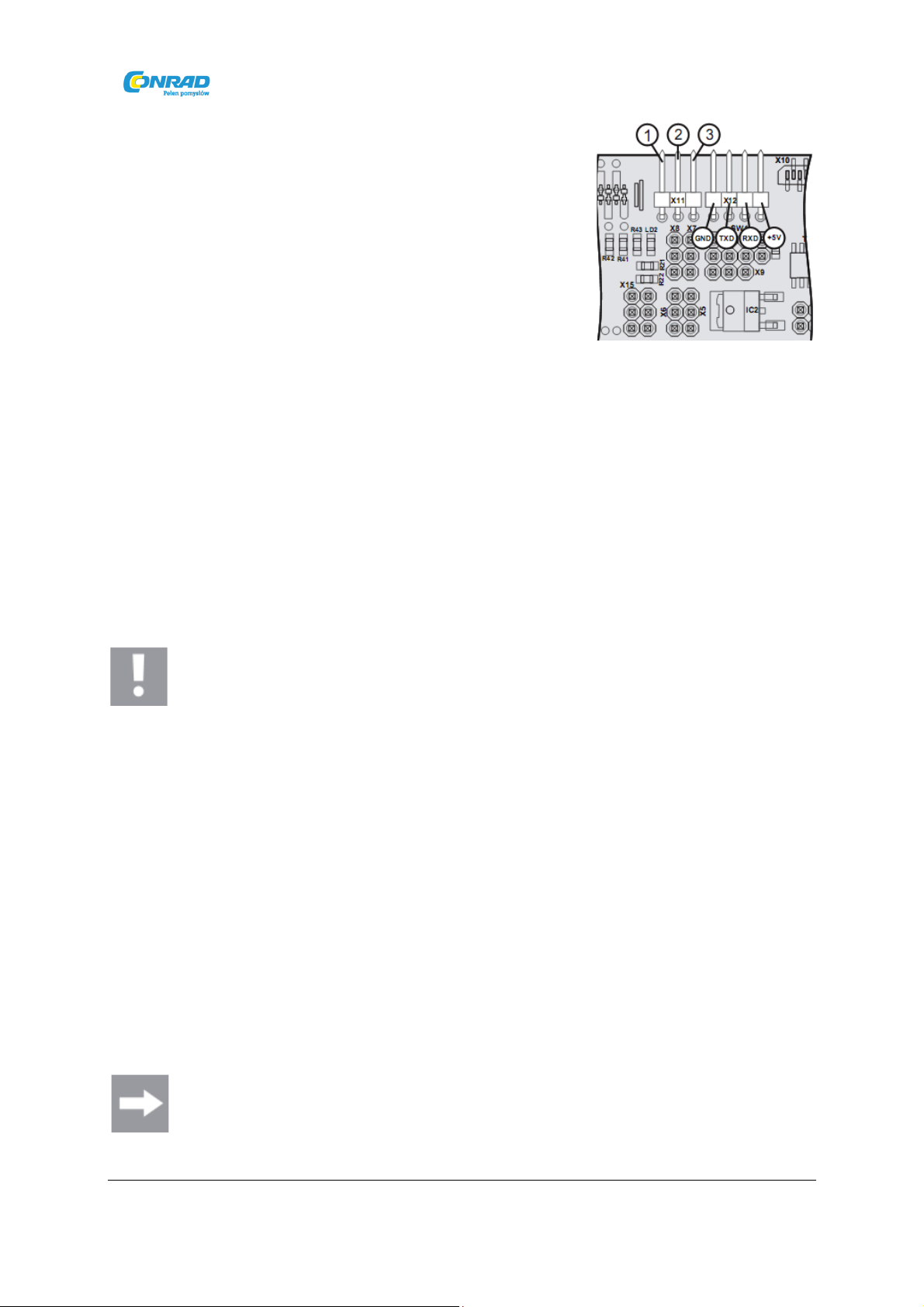
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'21'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
16. Informacje dotyczące pierwszego startu
a) Ogólne sterowanie
Quadrocopter ogólnie posiada sterowność zwykłego helikoptera. Różnica tkwi w szczegółach. Śmigłowce stabilizują równowagę
momentu za pomocą specjalnych żyroskopów (funkcją yaw). Z tego powodu występują dwa różne systemy: „normalne żyroskopy” i
żyroskopy z funkcją „blokady kursu” („heading lock”).
Normalne żyroskopy stabilizują (amortyzują) tylny wirnik, niwelując chwiejne ruchy spowodowane przez pilotów (zwiększanie prędkości
i/lub zmiany wznoszenia i/lub wpływ sił zewnętrznych, np. wiatru). Żyroskop z funkcją „heading lock” reaguje wstrzymująco, kontrując
chwiejne ruchy. Oba systemy reagują na ruch sterujący, np. „yaw w lewo” i ustalają pozycję neutralną dla nowego ustawienia z
uwzględnieniem chwiejnych ruchów.
W Quadrocopterze w odróżnieniu od helikoptera zainstalowane są 3 żyroskopy – w funkcji yaw, pitch i roll. Zainstalowanych żyroskopów
nie da się zakwalifikować ani do „normalnych żyroskopów” ani do żyroskopów z funkcją „heading lock”.
Żyroskopy Quadrocoptera są sprzężone ze sobą tak, że po każdym wymuszeniu sterowaniem system podejmuje próbę powrotu do
pozycji neutralnej (zawis w powietrzu). Skuteczność systemu zależy od dostępnego miejsca, prędkości lotu i warunków lotu, ustawień
aparatury zdalnego sterowania i warunków pogodowych, np. wiatru.
b) Uruchamianie silnika
Ważne!
Zanim uruchomisz nadajnik ustaw drążek przepustnicy na „silnik wyłączony”, a wszystkie regulacje drążka pilota na zero
(środkowe położenie). W przeciwnym razie model może nie rozpoznać aparatury po podpięciu baterii.
• Po podłączeniu pakietu diody LED wskazują „gotowy do lotu”.
• THROTTLE na zero, YAW do oporu w lewo, PITCH i ROLL w pozycji neutralnej (zob. też zdjęcie 10).
• Silniki zaczynają się uruchamiać jeden po drugim z prędkością jałową.
• Czerwona dioda LED zapala się na stałe, zielona miga („silniki włączone”).
• Powoli zwiększać THROTTLE, aby oderwać się od ziemi (zawis w powietrzu).
c) Odcięcie silników
Działające silniki mogą zostać wyłączone następująco:
• THROTTLE na zero, YAW do oporu w lewo, PITCH i ROLL w pozycji neutralnej.
• Silniki się zatrzymują.
• Czerwona dioda LED się wyłącza, zielona zapalona na stałe („gotowy do lotu”).
d) Zawis w powietrzu
Aby uprościć wytłumaczenie sterowania i je ujednolicić, wykorzystana jest powszechnie stosowana, klasyczna terminologia zaczerpnięta
z języka lotów:
Opis kierunku powinien być zawsze interpretowany z perspektywy „wirtualnego” pilota znajdującego się w modelu. Wskaźnik kierunku na
nóżce podwozia oznacza kierunek „do przodu”. Wytłumaczenie jest oparte na konfiguracji trybu lotu 2.
„Zawis w powietrzu” oznacza stan modelu, w którym siła nośna modelu jest równoważona przez jego ciężar. Powoduje to, że model nie
zwiększa ani nie zmniejsza pułapu. Stan osiąga się po ustawieniu drążka sterownego przepustnicy mniej więcej w połowie skoku (ale
niezależnie od możliwego obciążenia dodatkowego).
Podczas lotu nisko nad ziemią i podczas startu można zauważyć turbulencje i przepływ powietrza, co może mieć wpływ
na Quadrocopter. Może zostać zaobserwowana szybsza reakcja na ruchy sterujące i delikatne wahania w przód, tył bądź
na boki.

!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'22'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
e) Yaw
„Yaw” oznacza rotację modelu dookoła osi odchylania (osi pionowej). Ruch ten
jest albo niezamierzony, wynikający z prędkości obrotowej silników, lub
zamierzony jako zmiana kierunku lotu. Quadrocopter kontroluje ten ruch,
zmieniając prędkość obrotów jednego silnika w stosunku do drugiego, w
odróżnieniu od helikoptera, gdzie regulowany jest wirnikiem ogonowym.
Punkt (1) wskazuje „do przodu”.
f) Pitch
„Pitch” oznacza ruch wzdłuż osi skośnej, co może być porównane do kiwania
głową. Dzięki temu Quadrocopter nabiera prędkości lotu w przód, w tył lub
zmniejsza prędkość.
Punkt (1) wskazuje „do przodu”.
g) Roll
„Roll” oznacza ruch wzdłuż osi wzdłużnej, co może być porównane do toczenia
się piłki na boki (lub poprzeczny chód kraba). W ten sposób Quadrocopter unosząc
jeden ze swoich bokówm porusza się na boki niezależnie od kierunku lotu.
Punkt (1) wskazuje „do przodu”.
17. Pierwszy lot
Ważne!
Przed włączeniem nadajnika wszystkie drążki kontrolne muszą być ułożone w pozycji „silnik wyłączony”, a przełączniki
w pozycji neutralnej. W przeciwnym razie nadajnik może nie zostać rozpoznany po podłączeniu akumulatora.
Włącz nadajnik. Następnie podłącz akumulator. Quadrocopter potwierdzi wykonanie samotestu zapaleniem zielonej diody
LED na stałe. W razie błędu dioda będzie migać. Jeśli wystąpi błąd, akumulator powinien zostać odłączony i
podłączony ponownie po wyeliminowaniu błędu (np. przepustnica nie znajdowała się w pozycji zero). W razie błędu silniki nie mogą
zostać uruchomione z powodów bezpieczeństwa.
Upewnij się, że model znajduje się na płaskiej powierzchni po podpięciu akumulatora. Do zapalenia się zielonej diody LED wszystkie
czujniki są wewnętrznie ustawiane, a Quadrocopter nie powinien być w tym czasie ruszany. Jeśli miejsce startu jest nierówne, sugeruje
się ustawienie go w poziomie i zapisanie pozycji neutralnej throttle/yaw całkiem w prawo (rozdział „Ustawienie pozycji neutralnej”).
Uruchom silniki (throttle na zero, yaw w lewo) i pozwól silnikom pracować przy prędkości jałowej. Sprawdź pracujące silniki. Wszystkie
silniki powinny pracować płynnie w płaszczyźnie, bez drgań Quadrocoptera. Jeśli któryś silnik się nie uruchomi, należy wyłączyć
wszystkie i przesunąć ręcznie śmigło niedziałającego silnika o ¼ obrotu. Następnie ponownie uruchom silniki.
Teraz powoli zwiększaj prędkość obrotową silników (przepustnica) do momentu zaobserwowania delikatnego zwiększenia wysokości.
Sprawdź komendy roll i yaw tuż przed startem Quadrocoptera, aby upewnić się, że nie są odwrócone i nadajnik działa prawidłowo.
Unikaj szybkich ruchów sterujących. Obserwuj, w którą stronę zbacza model, i wykorzystaj ustawienia aparatury, aby wyeliminować te
ruchy.
Ważne!
Nigdy nie startuj z nieprawidłowo skonfigurowaną aparaturą sterującą.
Zwiększaj przepustnicę do momentu aż Quadrocopter będzie co najmniej metr nad ziemią. Delikatnie spróbuj korekty dryftu za pomocą
trymowania osi sterujących yaw, pitch, roll.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'23'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
Gdy tylko model wzniesie się odpowiednio wysoko, zmniejsz przepustnicę do momentu zawiśnięcia w powietrzu. Teraz najtrudniejsza
część już minęła i można powoli zapoznawać się ze sterowaniem latającego modelu. Aby wylądować Quadrocopterem, zmniejszaj
powoli przepustnicę do momentu aż model zacznie delikatnie opadać. Solidne lądowanie nie powinno wyrządzić modelowi szkód i nie
powinno być kompensowane gwałtownymi ruchami drążków sterownych.
Próbuj lądować z ruchem pionowym („lądowanie helikopterowe”). Unikaj lądowań z prędkością poziomą („lądowanie samolotem”). Po
wylądowaniu wyłącz silniki.
Ćwicz start i lądowanie do czasu nabycia pewności w działaniu. Następnie opanuj sterowanie za pomocą osi pitch, roll, yaw. Zawsze
steruj powoli i ostrożnie, ćwicząc nowo opanowywane ruchy przed przystąpieniem do kolejnych manewrów. Pierwsze loty nie powinny
trwać dłużej niż 30-60 sekund.
18. Czyszczenie, konserwacja i naprawa
a) Regularne czyszczenie
Quadrocopter jest prostym, lecz misternie zaprojektowanym urządzeniem. Nie zawiera żadnych elementów mechanicznych
wymagających smarowania bądź specjalnej obsługi. Jednak po każdym locie powinno się oczyścić model z ewentualnych zabrudzeń
(trawy, pyłu itp.).
Do czyszczenia używaj suchej lub lekko wilgotnej szmatki i unikaj kontaktu wody z elektroniką, akumulatorem i silnikami.
Nie lataj bez pokrywy chroniącej elektronikę. Upewnij, że żadna wilgoć nie dociera do wewnątrz modelu. Nigdy nie lataj podczas
deszczu!
b) Wymiana śmigła
Jeśli śmigło zostanie uszkodzone podczas wypadku lub innej czynności, należy je niezwłocznie wymienić. Dotyczy to także innych
uszkodzeń śmigieł lub niewłaściwej ich pracy. Z powodu wysokiej prędkości uszkodzone śmigło może poluzować mocowanie. Może to
prowadzić do uszkodzenia lub zagrożenia dla otoczenia. Aby wymienić śmigło, należy odkręcić nakrętkę śmigła i zdjąć podkładkę.
Zdemontuj śmigło i przeprowadź montaż nowego jak w rozdziale „Montaż Quadrocoptera”
Uwaga!
Upewnij się, że kierunek obrotu wymienianego silnika jest taki sam jak jego zamiennika. Jeśli zostanie dobrany
niewłaściwie, model nie bę dzie mógł się oderwać od ziemi i będzie reagować gwałtownie przy następnym starcie! Utrata
gwarancji!
c) Wymiana silnika
Jeśli silnik jest wadliwy (przegrzewa się, ma luz na łożyskowaniu), musi zostać wymieniony. Aby tego dokonać, należy postępować
zgodnie z poniższymi instrukcjami:
• Zdejmij śmigło z uszkodzonego silnika.
• Zdejmij górną osłonę, płytkę wzmacniającą i górną część ramy, poluzowując górne śruby. Teraz masz dostęp do
sterowników silnika (płytka sterownika). Możesz ją odinstalować, aby ułatwić sobie pracę.
• Zanotuj kolory podłączenia silnika i punktów lutowania A, B i C i odlutuj przewody.
• Poluzuj śruby mocowania silnika i wyciągnij silnik. Przeciągnij przewód przez ramię promieniste.
• Weź nowy silnik i przeciągnij przewody przez ramię. Przymocuj silnik i przylutuj przewody zgodnie z zanotowanymi wcześniej
kolorami.
Uwaga!
Jeśli kolory przewodów zostaną pomieszane, kierunek obrotów silnika się zmieni. Spowoduje to nieprawidłowe działanie
modelu. Aby się upewnić, należy porównać konfigurację do konfiguracji wymienionego silnika. Utrata gwarancji!
• Włóż sterownik silnika i sprawdź ułożenie płaskich przewodów połączonych z tablicą sterowniczą i załóż
górną część ramy kratowej.
• Powtarzaj czynności dla kolejnych silników, jeśli to konieczne.
d) Wymiana ramienia promienistego
Uszkodzone ramiona można wymienić. Postępuj zgodnie z podpunktami wymieniania silnika. Kiedy zdemontujesz silnik z uszkodzonego
ramienia, zamocuj go na nowym ramieniu i postępuj zgodnie z opisanymi czynnościami.
Aby wymienić ramię, należy zdjąć górną część ramy kratowej. Podczas wyciągania ramienia obróć je delikatnie i wyjmij z ramy
kratowej.
e) Wymiana całej ramy
Jeśli rama jest uszkodzona po wypadku, ale elektronika nadal działa, możliwa jest wymiana ramy.
Aby to zrobić, należy zdjąć górną i dolną osłonę i górną część ramy kratowej. Następnie należy wymontować silniki i zamontować je
na nowych ramionach, jak opisano w rozdziale „Wymiana silnika”. Wyciągnij pozostałą elektronikę i zamontuj ją w nowej ramie.
Następnie umieść nowe ramiona w ramie.
f) Wymiana płyty statecznika
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Strona'24'z'24!
Dystrybucja'Conrad'Electronic'Sp.'z'o.o.,''
Copyright'©'Conrad'Electronic'2011,'Kopiowanie,'rozpowszechnianie,'z miany'bez'zgody'zabronion e .'
www.conrad.pl'
www.conrad.pl!
Jeżeli płyta statecznika uległa uszkodzeniu, można ją wymienić. Wykonaj czynności opisane w rozdziale „Wymiana całej ramy”.
W tym celu poluzuj śruby łą czące płyt statecznika z ramą oraz taśmy z rzepami. Wymień uszkodzoną płytę statecznika na nową i
przykręć. Następnie przymocuj ramiona promieniste do płyty statecznika za pomocą rzepów.
Lista części zamiennych jest dostępna na stronie internetowej www.conrad.pl w zakładce dokumentacji odpowiedniego
modelu.
19. Utylizacja
a) Informacje ogólne
Po zakończeniu żywotności zutylizuj model zgodnie z właściwymi przepisami prawnymi.
b) Baterie i akumulatory
Użytkownik jest prawnie zobowiązany (rozporządzenie dotyczące baterii) do zwrotu zużytych baterii i akumulatorów.
Nie wyrzucaj zużytych baterii z odpadami domowymi.
Baterie i akumulatory zawierające szkodliwe substancje są oznaczone następują cymi symbolami, które wskazują, że nie
można wyrzucać ich wraz z odpadami domowymi.
Oznaczenia szkodliwych metali ciężkich to: Cd = kadm, Hg = rtęć, Pb = ołów (nazwa na baterii/akumulatorze, np. pod
ikoną kosza po lewej).
Zużyte baterie/akumulatory możesz bezpłatnie przekazać do lokalnego punktu zbiórki, naszych sklepów lub dowolnego
punktu sprzedaży baterii/akumulatorów.
Tym samym spełnisz swój prawny obowiązek i przyczynisz się do ochrony środowiska.
20. Dane techniczne
Wymiary
Średnica bez śmigieł 650 mm
Całkowita wysokość: 285 mm
Masa: ok. 1.100 g (razem z akumulatorem)
Maksymalna masa startowa: 2.000 g (nie można przekraczać!)
Dane elektryczne
Zasilanie: 9-12 V (3-komorowa bateria LiPo )
Zalecany pakiet zasilający: LiPo, 3 komory, 2500 mAh, 25C
Zalecany system zdalnego sterowania: 6 kanałów
Dane wydajnościowe
Średni prąd w silniku: ok. 7-14 A
Maksymalna moc na silnik: ok. 19 A
Siła poprzeczna na silnik: maks. 900 g
Środowisko działania
Obszar działania: Wewnątrz i na zewnątrz (suche środowisko, brak deszczu)
Wiatr podczas pracy: Brak lub lekki wiatr
Temperatura +10 °C do +40 °C
Wilgotność powietrza: maks. 80%, bez kondensacji
Informacja prawna
Niniejsza instrukcja obsługi została opublikowana przez Conrad Electronic SE, Klaus-Conrad-Str. 1, D-92240 Hirschau (www.conrad.com).
Wszelkie prawa, obejmujące również tłumaczenie, zastrzeżone. Kopiowanie w jakikolwiek sposób, np. kserokopie, mikrofilmy lub utrwalanie w
elektronicznych systemach przetwarzania danych, wymaga uprzedniej zgody wydawcy. Przedruk, również częściowy, jest zabroniony.
Niniejsza instrukcja obsługi reprezentuje stan techniczny w chwili druku. Zastrzegamy sobie prawo do wprowadzania zmian w technologii i wyposażeniu.
© Copyright 2010 by Conrad Electronic
SE. V1_1110_01
 Loading...
Loading...