

Page 1
QuadroCopter « 650 » ARF
N° de commande : 20 93 00
Mode d’emploi
¨
¨
Version 11/10
Page 2

1. Introduction .......................................................................................................................................................... 4
2. Utilisation conforme ............................................................................................................................................. 5
3. Description du produit ......................................................................................................................................... 5
4. Volume de livraison ............................................................................................................................................. 6
5. Explication des symboles .................................................................................................................................... 7
6. Consignes de sécurité ......................................................................................................................................... 7
7. Indications concernant les batteries et accus ................................................................................................... 10
8. Montage final du QuadroCopter ........................................................................................................................ 12
9. Vérification de la configuration .......................................................................................................................... 18
10. Avant chaque mise en service .......................................................................................................................... 25
11. Dispositifs de sécurité........................................................................................................................................ 27
Table des matières
a) Généralités .................................................................................................................................................... 7
b) Avant la mise en service ............................................................................................................................... 8
c) En fonctionnement ........................................................................................................................................ 8
a) Émetteur ...................................................................................................................................................... 10
b) Accu de propulsion ...................................................................................................................................... 11
a) Montage des trains d’atterrissage ............................................................................................................... 12
b) Montage des rotors ..................................................................................................................................... 14
c) Raccordement du récepteur ....................................................................................................................... 15
d) Montage de l’accu de propulsion ................................................................................................................ 16
e) Montage du cache de protection supérieur ................................................................................................ 17
a) Généralités .................................................................................................................................................. 18
b) Identification des canaux de l’émetteur (généralités) ................................................................................. 19
c) Apprentir les « gaz » ................................................................................................................................... 20
d) Apprentir le « gier » ..................................................................................................................................... 20
e) Apprentir le « Nick » ....................................................................................................................................20
f) Apprentir le « Roll »..................................................................................................................................... 21
g) Réglage du mode de vol ............................................................................................................................. 22
h) Configuration avec le logiciel PC ................................................................................................................ 23
i) Différents modes de pilotage à distance .................................................................................................... 24
a) Vérification des raccords vissés .................................................................................................................. 25
b) Vérification des pièces mobiles................................................................................................................... 25
c) Compensation de la position neutre ........................................................................................................... 25
a) Protection moteur ........................................................................................................................................ 27
b) Atterrissage d’urgence ................................................................................................................................ 27
c) Surveillance de sous-tension ...................................................................................................................... 27
d) Fonction de recherche ................................................................................................................................ 27
Page
2
Page 3

Page
12. Affichages par DEL............................................................................................................................................ 28
a) Ready to Fly ................................................................................................................................................ 28
b) Démarrage du QuadroCopter ..................................................................................................................... 28
c) Mode configuration ...................................................................................................................................... 28
d) Compensation de décalage RC .................................................................................................................. 28
e) Compensation de la position neutre ........................................................................................................... 28
f) Liaison radio perturbée avant le démarrage ............................................................................................... 28
g) Liaison radio perturbée en vol .................................................................................................................... 29
h) Fonction atterrissage d’urgence ................................................................................................................. 29
i) Surveillance de sous-tension ...................................................................................................................... 29
13. Informations sur la carte Combi QC08.............................................................................................................. 30
a) Contacts d’alimentation et cavaliers de la carte Combi ............................................................................. 30
b) Sortie de signal ........................................................................................................................................... 31
c) Témoin d´état DEL ...................................................................................................................................... 31
d) Raccordement de l´interface ....................................................................................................................... 32
e) Raccordement du servo .............................................................................................................................. 33
14. Fonctionnement Light & Sound......................................................................................................................... 34
a) Informations de base ................................................................................................................................... 34
b) Sélection du mode d’éclairage .................................................................................................................... 36
c) Sélection de l’entrée RC ............................................................................................................................. 37
d) Raccordement de la bande de DEL/des DEL ............................................................................................ 38
e) Configuration du ronfleur ............................................................................................................................ 39
15. Raccordement au PC de la carte Combi .......................................................................................................... 40
16. Informations concernant le premier démarrage................................................................................................ 41
a) Comportement général de pilotage ............................................................................................................ 41
b) Démarrage des moteurs ............................................................................................................................. 41
c) Arrêt des moteurs ........................................................................................................................................ 41
d) Vol stationnaire............................................................................................................................................ 42
e) Gier .............................................................................................................................................................. 42
f) Nick .............................................................................................................................................................. 42
g) Roll .............................................................................................................................................................. 43
17. Le premier vol ....................................................................................................................................................44
18. Maintenance, entretien et réparation ................................................................................................................ 45
a) Nettoyage régulier ....................................................................................................................................... 45
b) Remplacement des rotors ........................................................................................................................... 45
c) Remplacement d’un moteur ........................................................................................................................45
d) Remplacement d’une console .................................................................................................................... 46
e) Remplacement du châssis complet ............................................................................................................ 46
f) Remplacement de la plaque de stabilisation .............................................................................................. 46
19. Elimination ......................................................................................................................................................... 47
a) Généralités .................................................................................................................................................. 47
b) Piles et accumulateurs ................................................................................................................................ 47
20. Caractéristiques techniques .............................................................................................................................. 48
3
Page 4

1. Introduction
Chère cliente, cher client,
Nous vous remercions de l’achat du présent produit.
Ce produit répond aux exigences légales nationales et européennes.
Afin de maintenir l’appareil en bon état et d’en assurer l’exploitation sans risques, l’utilisateur doit absolument tenir
compte de ce mode d’emploi !
Ce présent mode d’emploi fait partie intégrante de ce produit. Il comporte des directives importantes
pour la mise en service et la manipulation de l’appareil. Ces instructions doivent être prises en
compte, même si ce produit est transmis à une tierce personne.
Conservez le présent mode d’emploi afin de pouvoir le consulter à tout moment !
Tous les noms de sociétés et toutes les désignations de produits sont des marques déposées de leurs propriétaires
respectifs. Tous droits réservés.
Pour toutes vos questions techniques, veuillez vous adresser à :
Tél. : 0892 897 777
Fax : 0892 896 002
e-mail : support@conrad.fr
Du lundi au vendredi de 8h00 à 18h00, le samedi de 8h00 à 12h00
Tél. : 0848/80 12 88
Fax : 0848/80 12 89
e-mail : support@conrad.ch
Du lundi au vendredi de 8h00 à 12h00 et de 13h00 à 17h00
4
Page 5

2. Utilisation conforme
L’hélicoptère « QuadroCopter 650 ARF » est prévu exclusivement pour une utilisation privée dans le domaine du
modélisme et que pour les durées de fonctionnement correspondantes.
Le système n’est pas approprié pour une utilisation dans un autre domaine. Toute utilisation autre que celle stipulée
ci-dessus provoque l’endommagement du présent produit, ainsi que des risques liés, p.ex., courts-circuits, incendie,
électrocution, etc. Respectez impérativement les consignes de sécurité ! Veiller impérativement à ce que le produit ne
soit pas mouillé !
Ce produit n’est pas un jouet et ne convient pas aux enfants de moins de 14 ans.
Tenez compte de toutes les consignes de sécurité du présent mode d’emploi. Celles-ci contiennent des
informations importantes relatives à l’utilisation du produit.
Vous êtes seul responsable de l’utilisation sans danger du modèle miniature ! Le châssis est fourni prêt
à voler.
3. Description du produit
Le modèle réduit d’hélicoptère « QuadroCopter 650 ARF » est un objet volant presque complètement prémonté. Ces
engins volants sont déjà utilisés, dans le domaine professionnel, pour diverses activités. Le QuadroCopter est stabilisé par une électronique pilotée par un microprocesseur récent et des détecteurs d’accélération.
Des moteurs brushless à courant continu de grande qualité combinés à une commande développée spécifiquement
à cet usage permettent un fonctionnement en vol puissant et de longue durée et offrent une grande réserve pour les
charges utiles, comme, p.ex., des caméras, etc. La nouvelle commande et l’auto-stabilisation électronique offrent
d’excellentes caractéristiques de vol. Grâce à différents programmes de vol, les débutant et les pros auront rapidement beaucoup de plaisir à piloter ce modèle réduit.
Le QuadroCopter peut être piloté aussi bien en salle qu’à l’extérieur. Les régulations électroniques embarquées
peuvent réceptionner de petites modifications involontaires des positions de vol, mais ne peuvent les éliminer complètement. Le poids du QuadroCopter étant relativement faible, il réagit fortement au vent. Les conditions idéales de vol
sont donc assurées par un temps non venteux ou par vent faible et régulier.
Le châssis est de conception légère en composants en aluminium et en plastiques, il est donc stable et offre d’excellentes propriétés de vol. Le châssis peut être replié pour un transport simple et peu encombrant. Le châssis peut
contenir tout le système électronique tout en laissant de la place pour des platines d’extension. La structure grillagée
offre, de par son faible poids, une très bonne résistance et protection au système électronique.
De par sa configuration, ce modèle réduit a été conçu pour des modélistes expérimentés souhaitant effectuer, avec le
QuadroCopter, non seulement des vols suivant des modèles, mais également des vols acrobatiques en 3D avec une
grande précision.
Le modèle est extrêmement manoeuvrable et convient également aux pilotes débutants. Nous recommandons toutefois,
aux débutants, de suivre, avant le premier vol, une formation adaptée sur un simulateur d’hélicoptère ou de se faire
assister par un pilote de modèle réduit d’hélicoptère expérimenté.
Le modèle réduit peut être amélioré par des systèmes électroniques supplémentaires (la commande est dotée d’une
interface d’extension) et par l’installation de divers mécanismes sur le support de plateforme sous le châssis grillagé.
5
Page 6
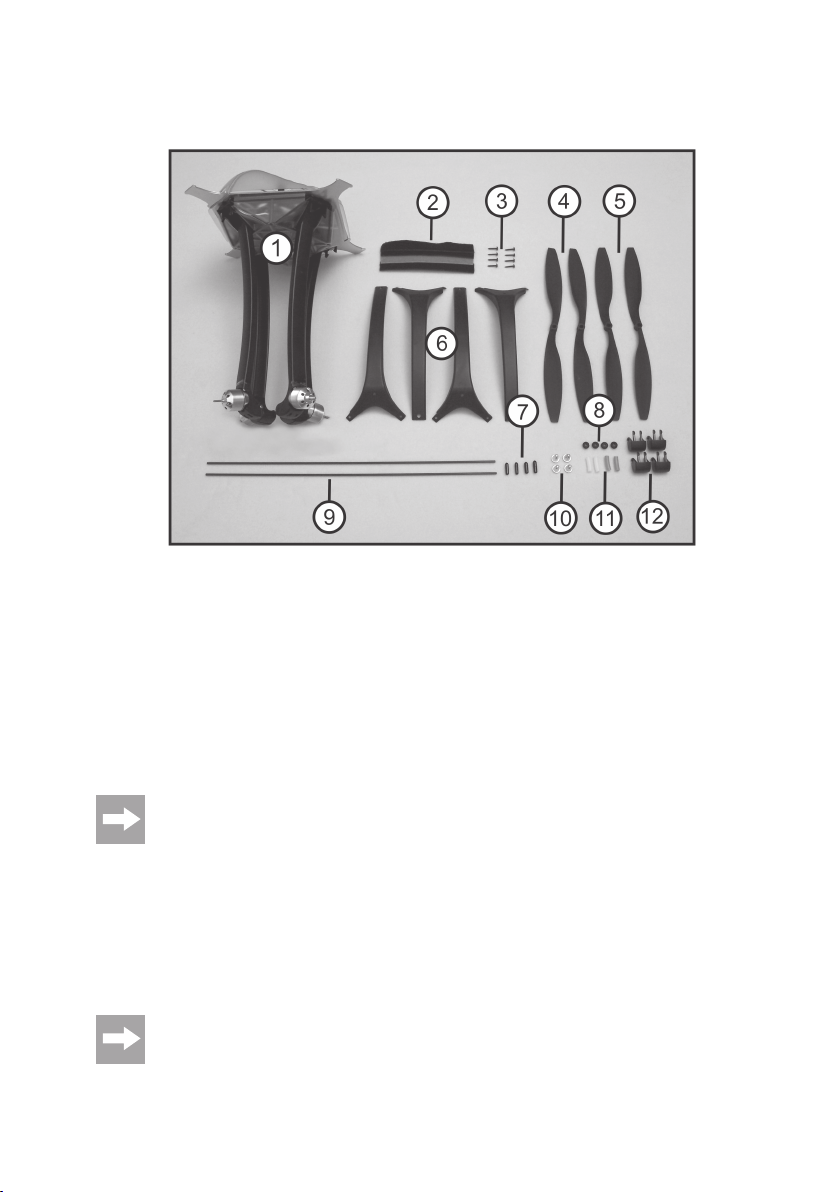
4. Contenu de la livraison
Figure 1
1) QuadroCopter pré-assemblé
2) Bandes auto-agrippantes (4 pièces)
3) Vis (8 pièces)
4) Rotors 2x gauches
5) Rotors 2x droits
6) Trains d’atterrissage (4 pièces)
7) Bouchons d’extrémité patins d’atterrissage (4
pièces)
8) Passe-fils (4 pièces)
9) Patins d’atterrissage (2 pièces)
Vous trouverez la liste des pièces détachées sur notre site Internet www.conrad.com dans la section
téléchargement du produit respectif. Vous pouvez aussi demander cette liste par téléphone. Vous trouverez
les coordonnées au début de cette notice d’utilisation au chapitre « Introduction ».
Le montage et le fonctionnement du modèle requièrent des composants additionnels qui ne sont pas compris dans la
livraison du modèle réduit d’avion :
Montage : Fer à souder et accessoires nécessaires à la soudure.
Fonctionnement : Le modèle réduit fonctionne à l’aide d’une commande à distance à 6 canaux, d’un accu de
propulsion LiPo à 3 cellules d’une capacité minimale de 2500 mAh et un taux de décharge de 25 C ainsi que d’un
chargeur adapté pour l’appareil LiPo avec compenseur LiPo.
10) Pointes de rotor (4 pièces)
11) Tuyaux en silicone (4 pièces)
12) Bouchons d’extrémité consoles (4 pièces)
Sans illustration : Notice d’utilisation en allemand (manuel), Notice
d’utilisation en anglais, français et néerlandais sur CD, tube
d’antenne, cavaliers (2 pièces), connecteur haute intensité pour le
raccordement de l’accu, bandes auto-agrippantes pour le montage
de l’accu (2 pièces), bagues élastiques (4 pièces) pour les pointes
de rotor, amortisseurs en caoutchouc autocollants (4 pièces) et
caoutchouc pour la fixation du capot.
Vous trouverez les accessoires adéquats qui ont fait leurs preuves en pratique dans nos catalogues sous
www.conrad.com.
6
Page 7
5. Explication des symboles
Le symbole avec un point d’exclamation attire l’attention sur les risques spécifiques lors du maniement, du
fonctionnement et de la commande du produit.
Le symbole « flèche » renvoie à des conseils et consignes d’utilisation particuliers.
6. Consignes de sécurité
Tout dommage résultant d’un non-respect du présent mode d’emploi entraîne l’annulation de la
garantie. Nous déclinons toute responsabilité pour d’éventuels dommages consécutifs !
Nous déclinons toute responsabilité pour d’éventuels dommages matériels ou corporels dus à un
maniement incorrect ou à la non-observation des consignes de sécurité ! De tels cas entraînent
l’annulation de la garantie.
La garantie ne couvre pas les traces d´usure normales causées par le fonctionnement et les dommages
causés par un accident (tels qu’un bris de rotor ou de châssis, etc.).
Chère cliente, cher client, ces mesures de sécurité servent non seulement à la protection du produit mais
également à assurer votre propre sécurité et celle d’autres personnes. Pour cette raison, veuillez lire ce
chapitre attentivement avant la mise en service du produit !
a) Généralités
Attention, remarque importante !
Le fonctionnement du modèle peut entraîner des dommages matériels et/ou corporels. Veillez donc
impérativement à être suffisamment assuré pour l’utilisation du modèle réduit, par ex. par une assurance
responsabilité civile. Si vous détenez déjà une assurance de responsabilité civile, veuillez vous renseigner
avant la mise en service du modèle auprès de votre assurance si le fonctionnement de celui-ci est assuré.
Nota : Une assurance est obligatoire pour tous les modèles réduits d’avion dans divers pays de l’Union
européenne !
• Pour des raisons de sécurité et d’homologation (CE), il est interdit de modifier la construction et/ou de transformer le
produit ou ses composants.
• Ce produit n’est pas un jouet, il n’est pas adapté pour des enfants de moins de 14 ans.
• Ne pas humidifier ni mouiller le produit. Le QuadroCopter étant équipé d’un système électronique très sensible,
réagissant à des variations de température et optimisé pour une plage de température définie, vous devez éviter
tout fonctionnement en-dessous de 10°C.
7
Page 8

• Si vous ne disposez pas de connaissances suffisantes concernant l’utilisation de modèles d’hélicoptères
radiocommandés, veuillez vous adresser à un modéliste expérimenté ou à un club de modélisme. Vous pouvez
également obtenir une première expérience à l’aide d’un simulateur de vol adapté.
• Ne laissez pas traîner le matériel d’emballage. Il pourrait devenir un jouet dangereux pour les enfants.
• Le produit a été développé pour fonctionner à une température ambiante comprise entre 10°C et 40°C et une
humidité de l’air usuelle en Europe Centrale par temps sec. Le fonctionnement dans des conditions autres que
celles décrites peut provoquer la modification des caractéristiques (du matériel) et endommager le produit !
• Ne pas dépasser un poids au décollage de plus de 2000 g. Un poids plus élevé peut endommager les rotors en
fonctionnement et provoquer la chute du modèle !
• Au cas où vous auriez des questions auxquelles le mode d’emploi n’a pu répondre, veuillez nous contacter (voir
chapitre 1 pour les informations de contact) ou demander l’avis d’un autre spécialiste.
b) Avant la mise en service
• Observer, par conséquent, le mode d´emploi des commandes à distance utilisées.
• Vérifiez régulièrement le fonctionnement sûr de votre modèle et de la radiocommande. Assurez vous de l’absence
de dommages visibles comme par ex. des connexions défectueuses ou des câbles endommagés.
• Toutes les pièces mobiles du modèle doivent être facilement manœuvrables, mais ne doivent pas avoir de jeu dans
le logement.
• Vérifiez avant chaque mise en service que les rotors sont correctement placés et bien fixés.
• L’accu de propulsion requis pour le fonctionnement et ceux éventuellement utilisés dans la télécommande doivent
être rechargés conformément aux instructions du fabricant.
• Si vous utilisez des piles pour l’alimentation de l’émetteur, veillez à ce qu’il y ait encore suffisamment de capacité
résiduelle (contrôleur de piles). Si les piles sont vides, remplacez toujours le jeu entier et jamais des cellules individuelles.
• Allumez toujours d’abord l’émetteur. Attention, lors de la mise en service de l’émetteur, le levier des gaz doit être sur
sa position la plus basse (moteurs à l’arrêt) ! Ne brancher qu’ensuite l’accu de propulsion du modèle. Le modèle
peut sinon réagir de manière inattendue et les rotors peuvent se mettre involontairement en marche !
• Lorsque les rotors fonctionnent, prenez garde qu’aucun objet ni aucune partie du corps n’entre dans la zone de
rotation et d’aspiration des rotors.
c) Pendant le fonctionnement
• Ne prenez pas de risques lors du fonctionnement du modèle réduit ! Votre sécurité personnelle et celle de votre
entourage dépendent exclusivement de votre comportement responsable lors de l’utilisation du modèle réduit.
• Un maniement incorrect peut provoquer de graves dommages matériels ou blesser des personnes ! Pour cette
raison, veillez, lors du fonctionnement, à maintenir une distance suffisante entre le modèle et les personnes, animaux
et objets à proximité.
• Choisissez un terrain approprié pour l’utilisation de votre modèle réduit.
• Ne pilotez votre modèle réduit que si vos réactions ne sont pas restreintes. La fatigue, l’alcool ou les médicaments
peuvent provoquer de mauvaises réactions.
• Ne volez jamais directement vers les spectateurs ou vers vous-même.
8
Page 9

• Non seulement le moteur et le régulateur de vol mais aussi l’accumulateur de propulsion peuvent s’échauffer pendant
l’utilisation du modèle réduit. Pour cette raison, faites une pause de 10 à 15 minutes, après tout vol de 20 minutes,
avant de recharger l’accu de propulsion ou de redémarrer avec un éventuel accu de propulsion de rechange. Les
moteurs d´entraînement doivent s´être refroidis à la température ambiante.
• Laissez toujours la télécommande (émetteur) allumée tant que le modèle est en fonctionnement. Après l’atterrissage,
déconnectez toujours d’abord l’accu de propulsion ou éteignez le modèle. Vous pouvez maintenant éteindre l’émetteur
de la radiocommande.
• En cas de défaut ou de dysfonctionnement, il faut d’abord éliminer la cause de la panne avant de redémarrer le
modèle.
• N’exposez pas votre modèle et la télécommande pendant une durée prolongée à un rayonnement direct du soleil
ou à une chaleur trop élevée.
• En cas de chute grave (d’une grande hauteur, par exemple), les détecteurs électroniques du gyroscope peuvent
être endommagés ou déréglés. En vérifier impérativement le fonctionnement avant tout nouveau vol ! Nous vous
recommandons de compenser à nouveau la position neutre.
• En cas de chute, réduisez aussitôt les gaz à zéro. Les rotors peuvent rencontrer des obstacles et être endommagés
par un choc. Vérifiez impérativement, avant tout nouveau vol, qu’ils ne présentent pas de fissures ou de cassures !
• Afin d’éviter, lors d’une chute, tout dommage sur le QuadroCopter du à une sous-tension de l’accu, ou afin d’éviter
une décharge complète de l’accu, nous vous conseillons de surveiller en vol les signaux lumineux de sous-tension.
Les DEL installées ne rayonnant que dans une seule direction, nous vous recommandons, de plus, d’installer un
protecteur de LiPo (LiPo Saver) N° de commande 230327. Cette protection indique, par signal lumineux, les menaces
de sous-tensions. Placez la protection de LiPo à un endroit adapté du QuadroCopter.
Vous pouvez également ajouter un affichage de sous-tension des DEL raccordées, par le biais de la carte Combi
intégrée. Veuillez, pour ce faire, suivre les indications de ce mode d’emploi, au chapitre 14 « Fonctionnement Light
& Sound ».
9
Page 10
7. Conseils relatifs aux piles et accus
Bien que le maniement de piles et d’accus fasse partie de la normalité de la vie quotidienne, ceci représente
toutefois nombreux problèmes et dangers. En particulier avec les accus LiPo/LiIon avec leur haut contenu
énergétique (en comparaison avec des accus conventionnels NiCd ou NiMH) il faut observer impérativement
diverses prescriptions car autrement il y a risque d’explosion et d’incendie.
Le QuadroCopter est fourni sans télécommande, accus ni chargeur. Nous souhaitons toutefois, pour des
raisons de sécurité, vous fournir des informations complètes sur la manipulation des piles et accus. Veuillez
également lire tous les documents et informations fournies avec les accessoires utilisés (p.ex. la
télécommande, les accus, le chargeur) !
a) Émetteur
• Tenir les piles/accumulateurs hors de portée des enfants.
• Ne laissez pas traîner les piles/accus, les enfants ou les animaux domestiques risqueraient de les avaler. Consultez
dans ce cas immédiatement un médecin !
• Ne court-circuitez ni ne démonter jamais les piles/accumulateurs et ne les jetez jamais dans le feu. Risque d’explosion !
• En cas de contact avec la peau, les piles/accus qui fuient ou sont endommagés peuvent entraîner des brûlures à
l’acide. Veuillez donc utiliser des gants de protection appropriés.
• Les piles normales ne doivent pas être rechargées. Ceci représente un danger d´incendie et d´explosion ! Ne
rechargez que les accus prévus à cet effet, n’utilisez que des appareils de recharge d’accus appropriés.
• Insérez les piles/accumulateurs ou connectez le pack d’accumulateurs en respectant la polarité correcte
(plus/+ et moins/-).
• Si vous n’utilisez pas la télécommande pendant une durée prolongée (par ex. lors d’un stockage), retirez les piles
(ou les accus) de la télécommande car ils risquent de corroder et d’endommager ainsi l’appareil.
• Rechargez les accus NiCd ou NiMH environ tous les 3 mois, autrement, l’autodécharge provoque une décharge dite
complète, susceptible de rendre les accus inutilisables.
• Remplacez toujours le jeu entier de piles ou d’accus. Ne mélangez pas des piles/accus complètement chargés avec
des piles/accus mi-chargés. N’utilisez que des piles ou des accus du même type et du même fabricant.
• N´insérez jamais des piles et des accus en même temps !
10
Page 11

b) Accu de propulsion
Attention !
Après le vol, déconnectez l’accu de propulsion LiPo du système électronique du QuadroCopter.
Ne laissez pas l’accu de propulsion LiPo connecté au système électronique quand vous ne l’utilisez pas
(par ex. lors du transport ou du stockage). L’accu de propulsion LiPo peut sinon subir une décharge
complète. Ce qui le détruit et le rend inutilisable ! Le risque de dysfonctionnements par des impulsions
parasites est également présent Les rotors peuvent démarrer involontairement et provoquer des dommages
ou des blessures.
• Ne chargez jamais l’accu de propulsion LiPo immédiatement après son utilisation. Laissez toujours d’abord refroidir
l’accu de propulsion LiPo (au moins 10 - 15 minutes).
• Utilisez un chargeur LiPo approprié et un égaliseur/compensateur LiPo pour recharger les accus LiPo.
• Ne rechargez que des accus intacts et non endommagés. Au cas où l’isolation externe de l’accu serait endommagée
ou que l’accu serait déformé ou gonflé, il est absolument interdit de le charger. Dans un tel cas il y a risque accru
d’incendie et d’explosion !
• N’abimez jamais l’enveloppe extérieure d’un accu de propulsion LiPo. Ne découpez pas l’enveloppe le film extérieur.
Ne percez pas l’accu de propulsion LiPo avec des objets tranchants. Ceci représente un danger d´incendie et
d´explosion !
• Retirez l’accu de propulsion LiPo pour charger le modèle réduit et placez-le sur une surface réfractaire. Maintenez
une distance aux objets inflammables.
• Le chargeur et l’accu de propulsion LiPo s’échauffant pendant la procédure de charge, il est nécessaire d’assurer
une ventilation suffisante. Ne recouvrez jamais le chargeur ni l’accumulateur de propulsion LiPo ! Cela vaut
naturellement aussi pour d’autres chargeurs et d’autres accumulateurs.
• Ne chargez jamais les accus LiPo sans surveillance.
• Débranchez l’accu de propulsion LiPo du chargeur lorsqu’il est complètement rechargé.
• Le chargeur n’est conçu que pour fonctionner dans des locaux clos et secs. Il faut impérativement veiller à ce que
les chargeurs et les accus LiPo ne prennent pas l’humidité ni ne soient mouillés.
Danger de mort par électrocution. De plus, il y a risque d´incendie et d´explosion par l’accu. Les accus
LiPo sont particulièrement sensibles à l’humidité à cause des produits chimiques qu’ils contiennent !
N’exposez pas le chargeur ou l’accu de propulsion LiPo à des températures élevées/basses ni à un
rayonnement solaire direct. Lorsque vous manipulez des accumulateurs LiPo, respectez les consignes de
sécurité spéciales du fabricant de l’accumulateur.
11
Page 12
8. Montage final du QuadroCopter
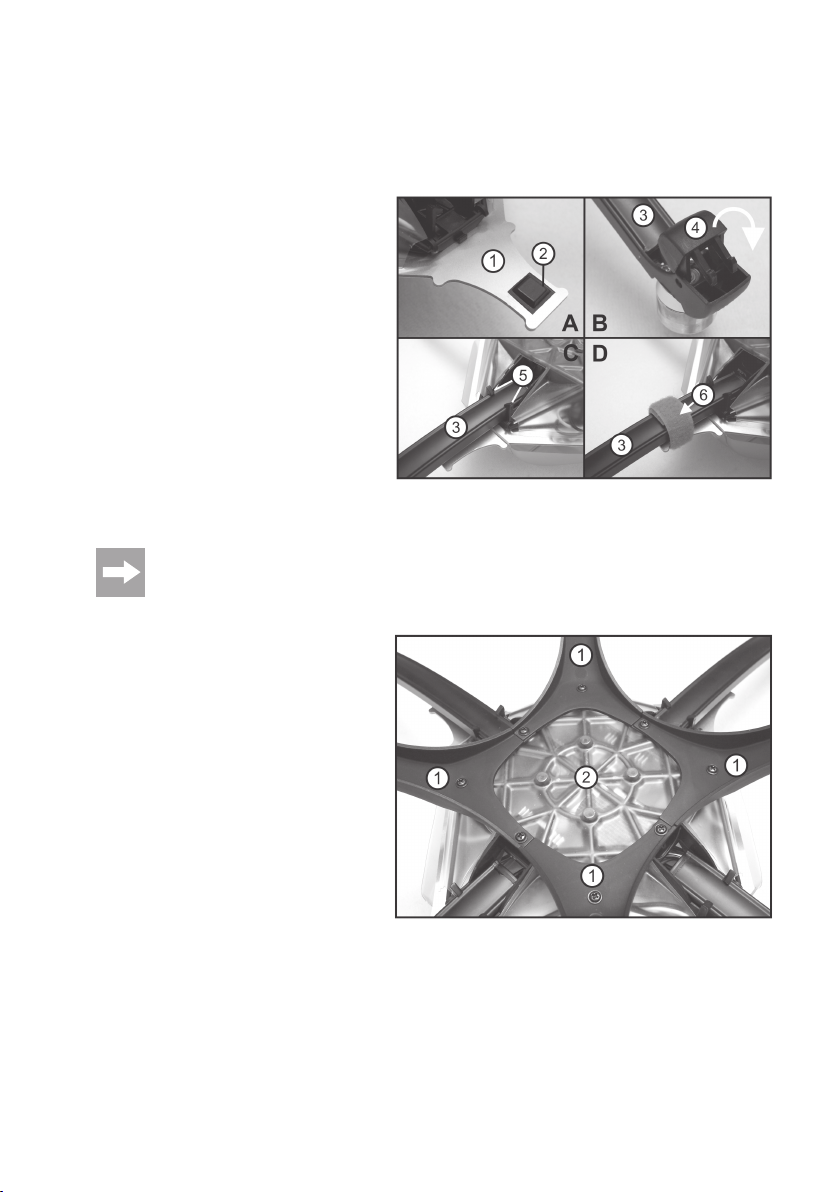
a) Montage des trains d’atterrissage
Apposez un amortisseur autocollant en caoutchouc
(2) aux quatre extrémités de la plaque de renfort
du châssis (1), comme illustré figure 2a, Position
« A ». Ces amortisseurs protègent les consoles (3)
contre les chocs.
Montez, sur les quatre consoles (3), les embouts
(4) comme illustré sur la figure 2a, Position « B »
et emboîtez ces embouts.
Sortez complètement les quatre consoles (3) et
emboîtez les dans les verrouillages (5), voir figure
2a, Position « C ».
Enroulez les bandes auto-agrippantes (6) autour
des consoles, voir figure 2a, Position « D ». Montez
la bande auto-agrippante rouge autour de la
console avec la « Flèche d’orientation » et qui
représente, de plus l’« avant » du QuadroCopter.
Le montage des amortisseurs en caoutchouc (figure 2a, position « A ») et des bandes auto-agrippantes
(figure 2a, position « D »), la liaison entre la console et la cellule du fuselage est, de plus, stabilisée. Ce
type de fixation est, de plus, suffisamment élastique pour amortir les atterrissages plus durs. Ces mesures
illustrées améliorent de plus les propriétés de vol.
Posez le Quadrocopter à l’envers sur un support
adapté. Montez les quatre trains d’atterrissage (1)
sous le châssis (2) comme illustré en figure 2b.
Utilisez, pour ce faire, les huit vis fournies.
Percez doucement, avant le montage, les trous
dans le capot en plastique du châssis, à l’aide d’un
petit tournevis.
Attention, lors du montage, les trains d’atterrissage
doivent comporter, à l’extérieur, une « partie
supérieure » et, en face, une « partie inférieure »,
là où le perçage est prévu pour la vis de fixation.
Figure 2a
12
Figure 2b
Page 13

Montez les quatre passe-fils en caoutchouc (1)
dans les perçages des trains d’atterrissage (2).
Enfiler ensuite les patins d’atterrissage (33) centrés
dans les passe-fils (1).
Poussez alors, de l’extérieur, les courts tuyaux en
silicone (4) jusqu’aux passe-fils (1) sur les patins
d’atterrissage (3). Les tuyaux en silicone
empêchent les patins d’atterrissage de se décaler.
Emboîtez un bouchon d’extrémité (5) sur chaque
extrémité des patins d’atterrissage (3).
Cette méthode de montage des patins
d’atterrissage est parfaitement suffisante pour les
vols normaux. Nous vous recommandons, pour les
vols plus durs, d’assurer les patins et les passe-fils
à l’aide de quelques gouttes de colle instantanée.
Utilisation optionnelle des trains d’atterrissage du « QuadroCopter 450 » :
Vous pouvez également équiper l’hélicoptère des trains d’atterrissage du « QuadroCopter 450 », au lieu
de celui du « QuadroCopter 650 ». Ces trains d’atterrissage ne sont pas fournis avec le « QuadroCopter
650 », mais peuvent être commandés en tant que pièce de rechange (voir la liste de pièces de rechange
du « QuadroCopter 450 »).
La figure 2d illustre les trains d’atterrissage du
« QuadroCopter 450 ».
Rabattez les trains d’atterrissage (1) en position
de vol. Vous devez sentir vraiment l’enclenchement
des clips de retenue (2) dans les fentes (3).
Pour les rabattre, poussez légèrement les clips de
retenue (2) dans les fentes (3), à l’aide d’un petit
tournevis, pour éviter que les éléments en plastique
ne cassent.
L’un des trains d’atterrissage comporte une marque
rouge. Cette marque doit toujours être considérée
comme l’« avant » dans le sens du vol.
Figure 2c
Figure 2d
Lorsque les atterrissages sont plus durs, les trains d’atterrissages se rabattent. C´est normal et souhaité.
Si vous souhaitez éviter cet effet et ne souhaitez plus rabattre les trains d’atterrissage pour le transport,
vous pouvez les fixer durablement avec quelques gouttes de colle instantanée.
13
Page 14
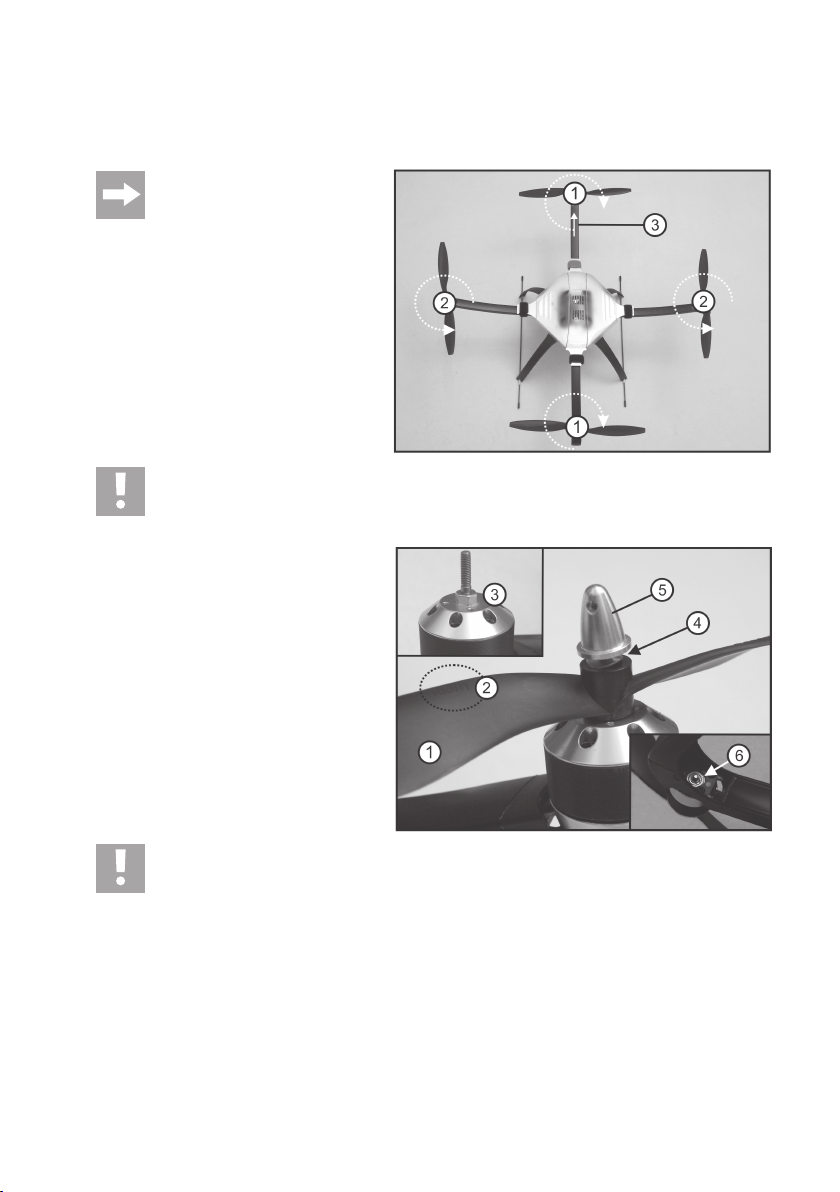
b) Montage des rotors
La figure ci-jointe vous indique le sens de rotation des rotors (vue de dessus). La flèche sur la console doit vous servir
de repère pour l’orientation du modèle réduit et représente l’« avant ».
Attention !
Les moteurs étant déjà prémontés,
vous devez faire attention au sens de
rotation des rotors à l’aide du sens du
vol (figure 3) !
Les rotors de l’axe longitudinal (1) tournent dans le
sens horaire (vers la droite) et doivent être identifiés
« RIGHT ».
Les rotors de l’axe transversal (2) tournent dans
le sens anti-horaire (vers la gauche) et doivent être
identifiés « LEFT ».
La flèche sur la console (3) indique l’« avant ».
Attention !
Si vous ne montez pas les rotors comme illustré, les sens de rotation programmés ne correspondent plus
à ceux des rotors. Vous ne pouvez alors plus faire voler ni piloter le QuadroCopter ! Perte de la garantie !
Les rotors et arbres moteurs sont dotés d’embouts
héxagonaux (3).
Posez les rotors (1) sur les arbres moteurs (3) de
manière à ce que les embouts héxagonaux
s’emboîtent. Attention aux inscriptions « RIGHT »
et « LEFT » sur les rotors (2).
Insérez alors une des rondelles élastiques fournies
(4) entre le rotor et la pointe de rotor (5) afin
d’empêcher que les rotors ne se détachent en vol.
Vissez, à l’aide d’un petit poinçon ou d’un tournevis,
les points de rotor sur les arbres moteurs.
Figure 3
14
Attention !
Si vous serrez trop fort, vous risquez d’endommager les moteurs. Les arbres peuvent rompre ou être
sortis des roulements. Les moteurs tournent alors plus difficilement ce qui peut avoir une influence négative
sur les propriétés de vol. Vérifiez donc, après avoir vissé les rotors, que tous les rotors tournent facilement.
La bague de butée représentée sur la figure 4, pos. 6, sous le moteur doit bouger facilement et ne doit pas
être bloquée.
Assurez-vous, avant chaque vol, que les rotors sont bien fixés sur les moteurs. Faites très attention lorsque
vous utilisez des outils.
Figure 4
Page 15
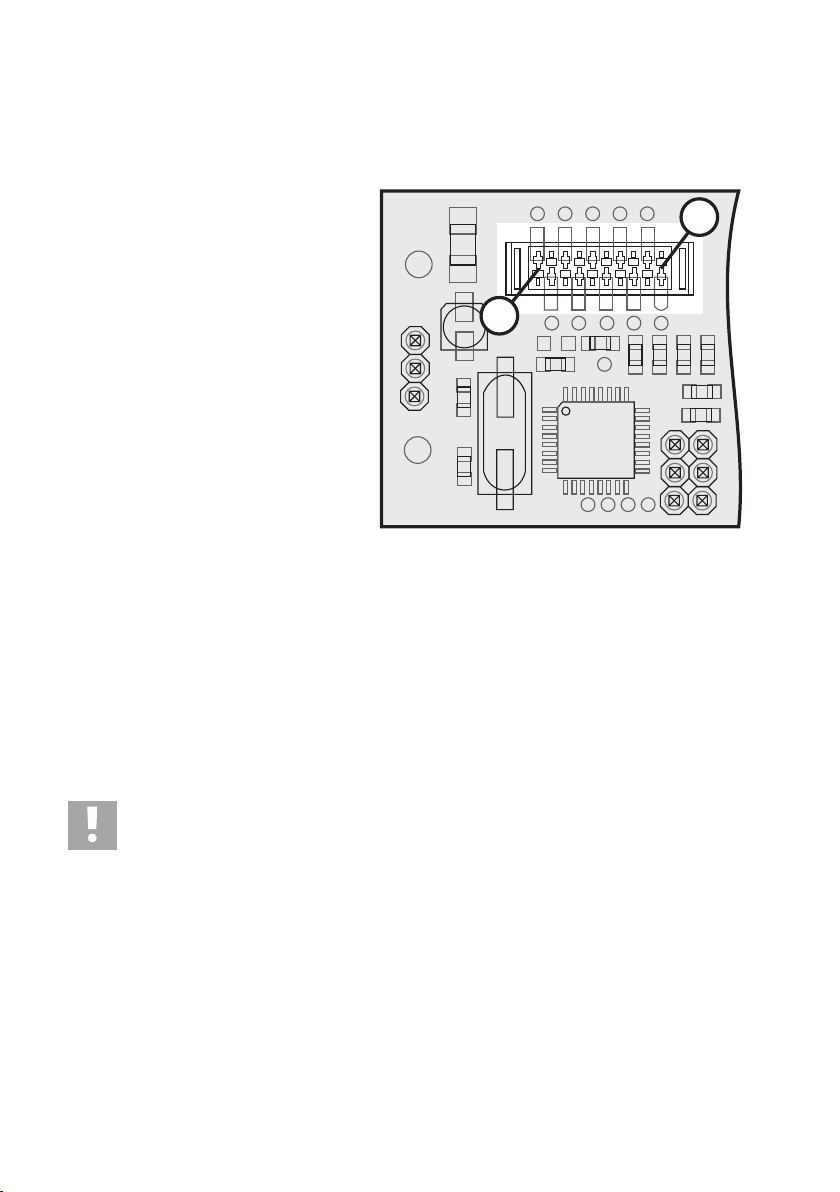
c) Raccordement du récepteur
Le récepteur est raccordé sur la prise de raccordement « X13 » de la carte Combi (1). Un câble de raccordement (2)
adapté est fourni à cet usage avec le QuadroCopter. La prise de raccordement « X13 » est dotée de 10 contacts
numérotés en continu de droite à gauche. Le contact 10 se trouve à droite et le contact 1 à gauche.
Les contact sont affectés de la manière suivante :
R41
X15
R43
1
LD2
Figure 5
Contact 10 = Canal 1
Contact 9 = Canal 2
Contact 8 = Canal 3
Contact 7 = Canal 4
Contact 6 = Canal 5
Contact 5 = Canal 6
Contact 4 = Canal 7
Contact 3 = Canal 8
Contact 2 = 5 V/CC/Plus (+)
+
PAD1
X14
-
PAD2
C18
C19
Q2
D1
10
X13
C4
R40
C17
LD1
R42
IC3
Contact 1 = TERRE/Moins (-)
Les signaux des 8 entrées (canal 1 – 8) sont mesurés et traités par le convertisseur de signaux du ronfleur. Un signal
cumulé est généré par tous les signaux disponibles, conformément à la spécification pour les télécommandes RC
(largeur d’impulsion entre 1 et 2 ms). Suite à la mesure des signaux et à la diffusion des signaux, on obtient une
temporisation de la longueur d’une Frame. Cette temporisation n’a cependant aucune influence sur le fonctionnement
et n’est évoqué que pour plus de compréhension.
Les signaux de servo mesurés peuvent survenir dans n’importe quel ordre, en parallèle, les uns après les autres ou se
chevaucher. Il n’y a donc aucune limitation et le convertisseur de signal cumulé peuvent être utilisés pour tous les
systèmes conventionnels. Aucune pause de synchronisation n’est nécessaire entre les différents signaux.
Pour alimenter en courant le récepteur, il suffit de raccorder les contacts 1 (Moins/-) et 2 (Plus/+) à un câble de
raccordement de servo.
Important !
Veillez à ce que les entrées du convertisseur de signal cumulé soient affectées sans trous ! Sur les
installations à 6 canaux, de 1 - 6 et pas, par exemple, 1 - 4 puis 6 et 7. Avec une telle configuration, le
système électronique serait incapable de reconnaître les canaux 6 et 7 !
Nous ne pouvons, étant donner la variété de dimensions et de modèles de récepteurs de télécommande
disponibles sur le marché, pas vous donner d’indications précises de montage du récepteur. Selon le
récepteur utilisé, vous pouvez le monter soir entre les platines du châssis grillagé, soit sur la plaque
renfort.
Si vous devez décaler, pour le montage du récepteur, les platines dans le châssis grillagé, nous vous
conseillons de monter la platine principale centrée avec les gyroscopes (ils se trouvent sur la petite platine
à part), pour avoir des propriétés de vol optimales.
R21
R22
X6
R21
X6
15
Page 16
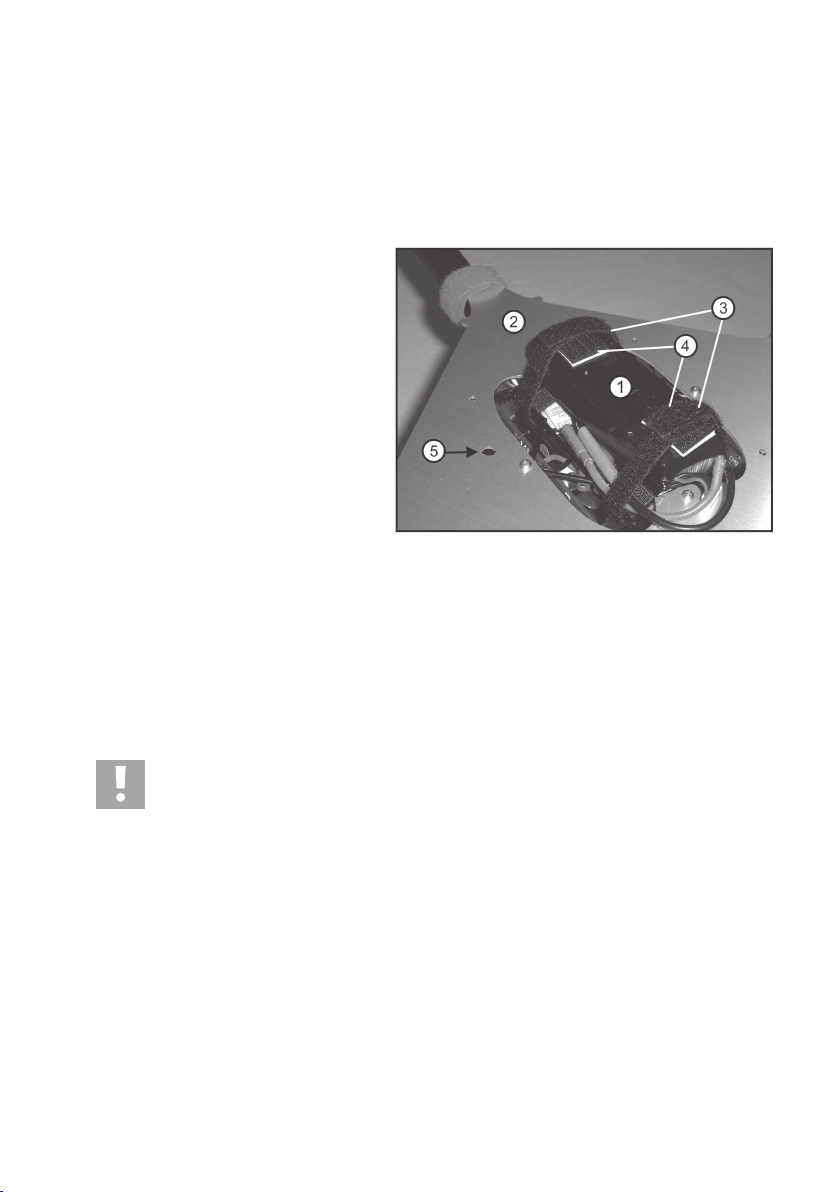
d) Montage de l’accu de propulsion
L’accu de propulsion n’est pas fourni dans la livraison. Procédez comme suit pour monter l’accu de propulsion :
Soudez le système de raccordement haute intensité fourni au câble de raccordement de l’accu. Veillez à ce que la
polarité soit correcte.
Le câble rouge du système électronique du QuadroCopter doit être relié, par le connecteur enfichable, au câble plus
de l’accu, le câble noir au câble moins de l’accu.
Montez l’accu (1) sur le châssis (2) et fixez-le à
l’aide des bandes agrippantes (3).
Collez en plus de la bande auto-agrippante
indiquée un bout de bande auto-agrippante (4 fourni) sur le haut de l´accu pour empêcher
efficacement tout glissement vers l´avant ou
l´arrière. Vous pouvez fixer les câbles de
raccordement également sous les bandes autoagrippantes (3), comme illustré.
L’accu soit être centré afin de ne pas charger
l’arrière, l’avant ou les côtés du QuadroCopter.
Un perçage est prévu,pour un tube d’antenne (5),
dans la plaque de renfort du châssis (2) . Vous
pouvez guider une antenne de récepteur vers
l’extérieur en la passant par le tube d’antenne. Un
autre perçage est également prévu, au même
endroit, dans le capot supérieur.
Le système électronique du QuadroCopter est équipé d’un dispositif de sécurité empêchant un démarrage intempestif
du moteur. Si le contact avec l’accu est établi, bien que l’émetteur ne soit pas en service et que le levier de commande
de régime/pas ne soit pas tiré sur le zéro, l’électronique de commande du modèle n’envoie aucun ordre de démarrage
aux moteurs.
Ce n’est qu’une fois l’émetteur en service et le levier de commande de régime/pas en position zéro que l’électronique
de commande peut autoriser le fonctionnement normal.
Attention :
Afin d’éviter un démarrage intempestif du moteur en cas de panne du dispositif de sécurité, veuillez mettre
l’émetteur en service. Le levier de commande de régime/pas doit être tiré à zéro afin qu’aucun ordre
d’accélération ne soit envoyé.
Figure 6
16
Page 17

e) Montage du cache de protection supérieur
La position du tube d’antenne et du perçage dans
le capot supérieur ne permet qu’une position de
montage pour le capot.
Fixez le capot supérieur (1) à l’aide d’un élastique
(2) comme illustré figure 7.
Poussez pour ce faire les élastiques à l’avant et à
l’arrière sous les consoles de la plaque de renfort.
Posez le capot de manière à ce que le perçage
prévu pour le tube d’antenne (3) se trouve audessus du perçage dans la plaque de renfort (voir
également le chapitre précédent).
Figure 7
17
Page 18

9. Vérification de la configuration
a) Généralités
Effectuez la configuration du QuadroCopter comme décrit dans ce chapitre. L’apprentissage des canaux est absolument
nécessaire, le QuadroCopter ne peut sinon pas reconnaître leur fréquence d’émission. Dès que cela est fait, le QuadroCopter est prêt à voler.
Si vous utilisez une télécommande par ordinateur, vous devez impérativement l’apprentir sans mélangeur !
Pour affecter correctement le levier de commande aux bonnes commandes, vous devez apprentir le QuadroCopter à
l’émetteur utilisé. Le système électronique enregistre alors quel canal est affecté à quelle commande. Vous pouvez,
de plus, sélectionner librement l’affectation du levier de commande (en fonction de vos habitudes), nous conseillons
cependant aux débutants de suivre les exemples donnés.
Le QuadroCopter est configuré en usine sur le mode « 2 ». Les exemples illustrent une affectation conventionnelle
pratique de nombreux pilotes de modèles réduits.
Réfléchissez tout d’abord à l’affectation que vous souhaitez effectuer, puis effectuez ensuite l’apprentissage des
canaux en fonction de cette réflexion. Vous trouverez d’autres possibilité pour le modes de commande 1, 3 ou 4
(modes 1, 3 ou 4) dans la notice, dans ce chapitre, sous le point « Modes de commande possibles ».
Une DEL rouge et une DEL verte sont installées sur la carte Combi et permettent de contrôler la configuration, l’affichage
des défauts de fonctionnement ou les états de fonctionnement. Vous trouverez les indications correspondantes au
tableau du prochain chapitre de cette notice « Dispositifs de sécurité ».
Si vous utilisez une télécommande Multiplex, vous devez passer les protocoles de servo des quatre fonctions
(gaz, roulis, nick et gier) de « MPX » à « UNI ».
S’il ne vous est pas possible d’apprentir le QuadroCopter sur votre télécommande, ceci peut être du à la
fonction Reverse de votre télécommande. Nous vous conseillons d’activer le commutateur Reverse pour
la fonction de gaz et de répéter la procédure d’apprentissage.
18
Page 19

b) Identification des canaux de l’émetteur (généralités)
Avant de commencer l’apprentissage, débranchez
tout accu éventuellement raccordé à votre QuadroCopter. Enlevez également tout éventuel câble de
raccordement entre le PC et le QuadroCopter.
Posez un cavalier (angl. « Jumper ») pour régler
la configuration RC à « R2 » pour « Remote
Setting » (5). Vous trouverez les barres de cavalier/
jumper en haut à droite à l’arrière de la carte de
commande du QuadroCopter.
Sur l’un des côtés de la platine (1), vous trouverez
deux DEL (2) pour l’affichage de certains états de
fonctionnement. En face, de l’autre côté de la
platine (3), vous trouverez les barres « S1, S2, R1,
R2 » (4) pour les cavaliers/Jumper.
Pour faire fonctionner le QuadroCopter en mode « Remote Setting », positionnez le cavalier « R2 » (5) comme illustré
figure 8. Ce réglage est indépendant des autres cavaliers/Jumper positionnés.
Important !
Mettez le levier des gaz sur « Arrêt moteurs » et tous les leviers de compensation/Régulateurs de
compensation du levier de commande en position centrale, avant de mettre l’émetteur en service. Vous
risquez, dans le cas contraire, que le QuadroCopter ne reconnaisse pas l’émetteur après le raccordement
de l’accu de propulsion.
Mettez votre émetteur en service, sortez complètement l’antenne télescopique de l’émetteur sur les télécommandes
27-/40 MHz. Veillez à ce que tous les leviers et toutes les compensations de l’émetteur restent en position neutre. Les
exemples présentés illustrent la procédure avec une télécommande en mode 2. Si vous préférez utiliser un autre
mode, les axes utilisés peuvent varier (voir le chapitre « Modes de commande possibles ») !
Assurez-vous également que les régulateurs de compensation restent, sur la télécommande, en position neutre ! La
reconnaissance des canaux ne serait pas possible dans le cas contraire !
Veillez également à ce que les mouvements de
levier soient effectués dans la bonne direction, les
signaux risquent sinon d’être enregistrés inversés !
Faites toujours fonctionner les télécommandes sur
ordinateur sans mélangeur !
Déplacez le levier des gaz (voir figure 9) vers
l’arrière en position neutre (moteur à l’arrêt), tous
les autres éléments de commande sur la position
neutre.
Si vous souhaitez voler en « Pas Inversé » (lorsque
le « Moteur est à l’arrêt », le levier de commande
des gaz est éloigné du corps), mettez le levier des
gaz dans la position la plus en avant avant de
raccorder l’accu.
Figure 8
Figure 9
19
Page 20

c) Apprentir les « gaz »
Branchez d´abord l’accu chargé au QuadroCopter. Il entame alors un auto-test puis commence l’apprentissage des
canaux. Le QuadroCopter reconnaît automatiquement, en fonction de la position des gaz, quel canal est utilisé pour
les gaz.
La DEL rouge du QuadroCopter en rythme de 2 (2x clignotement bref, pause longue, puis à nouveau 2x clignotement
bref, etc.) valide ce processus
d) Apprentir le « gier »
Déplacez le levier GIER (voir figure 10) vers la
gauche et le bas et maintenant le dans cette
position pendant une seconde minimum.
Le QuadroCopter reconnaît ainsi le canal GIER et
l’enregistre.
Remettez le levier GIER en position neutre, GAZ
toujours sur zéro.
La DEL rouge du QuadroCopter en rythme de 3
(3x clignotement bref, puis pause, etc.) valide ce
processus
La DEL verte indique, à chaque étape
de configuration, le numéro du canal,
tant que le levier est actionné !
Cependant seule la DEL rouge importe
pour l’affichage de la progression !
Veillez impérativement, pendant la procédure d’apprentissage, à ne déplacer que le levier souhaité, le réglage ne
pourrait pas être reconnu dans le cas contraire !
Figure 10
e) Apprentir le « Nick »
Déplacez le levier NICK (voir figure 11) en butée
de NICK DONNER vers le haut et maintenant le
dans cette position pendant une seconde minimum.
Le QuadroCopter reconnaît ainsi le canal NICK et
l’enregistre. Remettez le levier NICK en position
neutre, GAZ toujours sur zéro.
La DEL rouge du QuadroCopter en
rythme de 4 (4x clignotement bref, puis
pause, etc.) valide ce processus
20
Figure 11
Page 21

f) Apprentir le « Roll »
Déplacez le levier ROLL (voir figure 12) en butée
de ROLL GAUCHE complètement vers la gauche
et maintenant le dans cette position pendant une
seconde minimum.
Le QuadroCopter reconnaît ainsi le canal ROLL et
l’enregistre. Remettez le levier ROLL en position
neutre, GAZ toujours sur zéro.
La DEL rouge du QuadroCopter s’éteint et la DEL
verte reste allumée pour valider ce processus. La
procédure d’apprentissage est terminée et aboutie.
Débranchez l’accu du QuadroCopter et enlevez le
cavalier/jumper « R2 ».
Vous pouvez laisser les autres cavaliers en place.
L’apprentissage des canaux est terminé.
Figure 12
21
Page 22

g) Réglage du mode de vol
Le QuadroCopter a trois différents mode de vol :
• Débutant (adapté pour les débutants)
• Sport (adapté pour les pilotes des QuadroCopter expérimentés ; limitations d’axes réduites et dynamique plus forte)
• User (paramètres de vol configurables par logiciel PC, voir le chapitre « Configuration avec logiciel PC »)
Le mode de vol est déterminé avant la mise en service par positionnement des cavaliers/jumper « S1 » et « S2 » et ne
peut pas être modifié en fonctionnement. Les positions des cavaliers se trouvent sur la carte de commande (voir
également le point 8 du chapitre ¯ Reconnaître les canaux de l’émetteur »).
Conseil pratique:
Nous recommandons particulièrement aux débutants, de réduire l’effet direct des commandes avec
lesquelles le QuadroCopter traduit les commandes de la télécommande sur la position centrale (exponentiel
négatif « Expo »).
Explications :
Le QuadroCopter régit normalement de manière linéaire. Ceci signifie que le mouvement du levier de commande et
sa relation sont synchronisés. Avec une Expo négative, le QuadroCopter réagit au début plutôt lentement à la commande
au début du mouvement de la commande, mais plus fort avec des mouvements de commande plus fort. Ce
comportement est particulièrement pratique pour les débutants lorsqu’ils ont, au début, tendance à surpiloter, c’est à
dire à déplacer les leviers de la télécommande plus fort que nécessaire. Cet effet est bien sûr uniquement souhaité
uniquement sur les trois axes (Roulis, Nick et Gier), mais pas pour les gaz. Donc : Ne pas régler d’Expo sur les gaz !
Autrement dit : Avec une Expo négative, on obtient un comportement moins vif de l’engin volant en réaction par
rapport aux mouvements de commande de la position centrale des leviers de commande. Ceci survient soit à l’aide du
logiciel en option, soit à l’aide des cavaliers/jumper du QuadroCopter (voir « Mode débutant »), soit encore par une
fonction « Expo » présente sur la télécommande. Seules les télécommandes d’ordinateur ont le réglage « Expo ».
Mais vous devez procéder avec la plus grande attention, plus l’Expo négative est haute, plus le QuadroCopter a des
réactions agressives dans la zone de fin de mouvement de levier.
Le tableau suivant indique les différents réglages des cavaliers/Jumper. Aucun cavalier/Jumper n’est préparé en
réglage d’usine et le QuadroCopter est en mode débutant. Les cavaliers/jumper « S1 » et « S2 » sont indépendants
des autres cavaliers/Jumper !
Débutant Sport Utilisateur
22
Pour le mode de vol « User », vous devez programmer le logiciel de configuration en option avec votre
propre « Setting ». Vous pouvez, pour ce faire, utiliser le mode Débutant ou le mode Sport et les adapter
à vos désirs. Veuillez respecter les conseils de la notice d’utilisation du jeu de configuration.
Page 23

h) Configuration avec le logiciel PC
Pour faire voler le QuadroCopter uniquement avec vos propres paramètres, vous pouvez raccorder le système
électronique du QuadroCopter via un câble interface (Série-TTL sur USB) à un PC.
Vous pouvez obtenir, pour cela, en option, un jeu de configuration pour PC. Il contient un câble de raccordement, une
description détaillée ainsi que le programme sur CD. Ce jeu est disponible pour Microsoft® Windows XP®*, Windows
Vista®* et Windows 7®* (* Microsoft, Windows XP, Windows Vista et Windows 7 sont des marques déposées de
Microsoft Cooperation aux USA et d’autres pays).
Il n’est pas nécessaire, pour un fonctionnement de vol normal, d’effectuer la configuration à l’aide d’un PC, ce sujet
n’est donc pas approfondi. Vous trouverez plus d’informations concernant la configuration dans la notice d’utilisation
du logiciel.
Si le cavalier/Jumper « R1 » est déterminé, le QuadroCopter est en mode de configuration PC (PC-Mode) et ne peut
pas voler. Enlevez ce cavalier/jumper pour le fonctionnement de vol normal !
Une micro touche est montée sur la platine de commande, sous les DEL, elle peut être utilisée pour
réinitialiser le système électronique de commande. Pour ce faire, appuyez pendant 1 sec. env. sur la
micro-touche, accu raccordé. Le système électronique redémarre et passe dans l’état déterminé par le
cavalier/jumper. Cette action équivaut à la commande « Débrancher l’accu de propulsion ».
Vous trouverez la micro-touche (1) et l’interface (2)
sur la carte de commande (3). Pour des raisons
liées à la photographie, vous verrez, sur la figure
13, la platine démontée de la carte de commande.
Figure 13
23
Page 24

i) Différents modes de pilotage à distance
Mode Gaz Gier Nick Roll
1
2
3
4
24
Page 25

10. Avant chaque mise en service
a) Vérifier les raccords vissés
Vérifiez impérativement le bon serrage de tous les raccords vissés après le transport et avant le vol. Les raccords
vissés peuvent se desserrer avec les vibrations du transport et du vol. Vous devez donc effectuer, comme sur un
véritable hélicoptère, un Pre-flight-check complet.
b) Vérification des pièces mobiles
Vérifiez impérativement avant le vol la manoeuvrabilté des toutes les pièces mobiles et pivotées. Elles doivent pouvoir
bouger facilement sans toutefois avoir de jeu.
c) Compensation de la position neutre
Vous devez régler la position neutre pour que le QuadroCopter fonctionne correctement. Il s’agit de la position qui
tente de stabiliser le QuadroCopter, si vous ne souhaitez pas d’autre manoeuvre de vol.
Procédez ici dans l’ordre suivant :
1) Allumez l’émetteur.
2) Mettez les gaz à zéro et tous les autres leviers et compensations en position neutre
3) Placer le QuadroCopter sur une surface horizontale et plane !
4) Branchez l’accu au QuadroCopter
5) La DEL rouge du QuadroCopter soit être ETEINTE et la verte ALLUMÉE
6) Déplacer GAZ en butée complète et GIER en butée complète
à droite (figure 14)
7) La DEL verte du QuadroCopter clignote pour valider la position neutre qui est alors enregistrée.
8) Remettez le GAZ à zéro, GIER, NICK et ROLL en position neutre
9) La DEL rouge est ETEINTE et la DEL verte ALLUMÉE -> Le QuadroCopter est prêt à voler !
Figure 14
25
Page 26

Si vous ne réglez pas la position neutre de cette manière, le QuadroCopter utilise soit le réglage d’usine, soit la
dernière valeur enregistrée !
Il est très important de régler correctement la position neutre du QuadroCopter. Pour cela, la position
neutre doit être réglée sur un support parfaitement horizontal. L’idéal est d’utiliser un niveau.
Le réglage d’usine peut, à cause de conditions environnantes différentes en usine que sur le lieu du vol, ne pas
s’avérer idéale ! Nous vous recommandons donc de régler la position neutre avant le premier vol.
Si le QuadroCopter dévie toujours d’un côté, malgré une compensation adaptée, vous devez réenregistrer la position
neutre, en soulevant légèrement le QuadroCopter du côté vers lequel il dévie. Cette position (manipulée) est alors
enregistrée en tant que nouvelle position neutre.
26
Page 27

11. Dispositifs de sécurité
Le QuadroCopter est doté d’une série de dispositifs de sécurité qui le protègent contre les dommages ou les limitent
à un minimum. Les mécanismes de protection sont identifiés à l’aide de DEL. Veuillez lire également le chapitre 12
« Affichage des DEL ».
a) Protection moteur
L’électronique de commande est dotée d’une protection moteur qui interrompt aussitôt tous les moteurs en cas de
blocage d’un rotor (p.ex. après une chute). Vous pouvez, après avoir vérifié les dommages éventuels, redémarrer les
moteurs par la commande normale « Démarrage des moteurs ».
b) Atterrissage d’urgence
Lorsque l’électronique de commande du QuadroCopter détecte de trop fortes perturbations du signal de commande
à distance, elle tente de rétablir la position horizontale du QuadroCopter.
Si la réception est toujours perturbée, le gaz est mis à une valeur légèrement en dessous du vol stationnaire (sans
poids supplémentaire) et le QuadroCopter commence à descendre.
Une fois la perturbation de la réception passée, le pilote du modèle réduit peut intervenir par une commande et
terminer le programme d’atterrissage d’urgence.
c) Surveillance de sous-tension
Le QuadroCopter surveille en continu la tension de l’accu raccordé. Si elle baisse au-delà d’une certaine durée sous
une valeur critique, les DEL l’affichent.
La DEL rouge clignote et la DEL verte s’allume en continu. Cet affichage ne s’éteint que lorsque l’accu est débranché.
Pour détecter un accu faible pendant le vol, nous vous conseillons d’augmenter les gaz plusieurs fois. Si le QuadroCopter réagit lentement et peu, nous vous conseillons d’atterrir et de vérifier l’accu. Ce test n’est cependant pas facile
à détecter étant donnée la puissance.
En long vol ininterrompu, nous vous conseillons également de vérifier les affichages par DEL pendant un atterrissage
intermédiaire !
Conseil pratique : Afin d’éviter, lors d’une chute, tout dommage sur le QuadroCopter du à une sous-tension de
l’accu, ou afin d’éviter une décharge complète de l’accu, nous vous conseillons de surveiller en vol les signaux lumineux
de sous-tension. Les DEL installées ne rayonnant que dans une seule direction, nous vous recommandons, de plus,
d’installer un protecteur de LiPo (LiPo Saver) N° de commande 230327. Cette protection indique, par signal lumineux,
les menaces de sous-tensions. Placez la protection de LiPo à un endroit adapté du QuadroCopter et raccordez-le,
p.ex., à la prise du compensateur de l’accu.
d) Fonction de recherche
En cas d'absence de signal d'émetteur ou d'émetteur éteint, le QuadroCopter allumé émet automatiquement un
signal acoustique (bips sonores).
En cas d'atterrissage dans les hautes herbes ou dans un champ de blé ou de maïs, il peut ainsi être facilement
retrouvé.
27
Page 28

12. Affichages par DEL
Les affichages DEL suivants ne sont pas des indications de sécurité, mais simplement des indications sur les différents
états de fonctionnement. Vous trouverez les DEL des affichages décrits ci-après sur la carte de commande (voir
figure 8).
a) Ready to Fly
Lorsque l’accu de propulsion est raccordé mais que les moteurs ne sont pas encore démarrés, la DEL verte est
allumée et la rouge éteinte. Le QuadroCopter est prêt à fonctionner. Si ce n’est pas le cas, vous êtes en présence d’un
dysfonctionnement. Observez les indications mentionnées dans ce chapitre.
b) Démarrage du QuadroCopter
Vous démarrez les moteurs. La DEL rouge est allumée en continu et la DEL verte clignote. Après env. 2 secondes, la
DEL verte est également allumée en continu. Si ce n’est pas le cas, vous êtes en présence d’un dysfonctionnement.
Observez les indications mentionnées dans ce chapitre.
c) Mode de configuration
Pendant la configuration de la télécommande, la DEL rouge indique l’étape de programmation et la DEL verte le canal
à programmer en clignotant avec des pauses.
d) Compensation de décalage RC
Une fois l’accu de propulsion branché, les DEL rouge et verte clignotent rapidement et indiquent la compensation
entre l’émetteur et le système électronique du QuadroCopter. Une fois la compensation terminée, la DEL rouge
s’éteint et la DEL verte s’allume en continu.
e) Compensation de la position neutre
Lors de la compensation de la position neutre, la DEL verte clignote rapidement. La DEL rouge est éteinte.
Les affichages DEL suivants sont des indications de sécurité. Vous devez en rechercher la cause et y remédier.
f) Liaison radio perturbée avant le démarrage
Vous souhaitez démarrer et les moteurs sont encore à l’arrêt. Les DEL rouge et verte clignotent lentement à contre
temps et signalent une liaison radio perturbée.
Causes éventuelles : Quartz du récepteur tombé de son socle ; Quartz du récepteur défectueux ; Antenne du
récepteur arrachée. Antenne de l’émetteur non sortie ; Second émetteur allumé sur le même canal d’émission ;
Batteries/accus de l’émetteur déchargés. Vérifiez les causes possibles et redémarrez.
En cas de perturbation prolongée de la liaison radio en vol, le QuadroCopter entame un atterrissage d’urgence et les
DEL indiquent ici aussi en clignotant à contre temps que la liaison radio est perturbée.
28
Page 29

g) Liaison radio perturbée en vol
Vous souhaitez démarrer et les moteurs sont déjà allumés ou vous êtes en vol. Les DEL rouge et verte clignotent
lentement à contre temps et signalent une liaison radio perturbée.
Causes éventuelles : Quartz du récepteur tombé de son socle ; Quartz du récepteur défectueux ; Antenne du
récepteur arrachée. Antenne de l’émetteur non sortie ; Second émetteur allumé sur le même canal d’émission ;
Batteries/accus de l’émetteur déchargés. Vérifiez les causes possibles et redémarrez.
En cas de perturbation prolongée de la liaison radio en vol, le QuadroCopter entame un atterrissage d’urgence et les
DEL indiquent ici aussi en clignotant à contre temps que la liaison radio est perturbée.
h) Fonction d’atterrissage d’urgence
La liaison radio est perturbée en vol pendant une longue période. Le QuadroCopter entame de lui-même un atterrissage
d’urgence. Les DEL rouge et verte clignotent lentement en même temps. Recherchez à l’aide des causes possibles
indiquées ci-avant.
i) Surveillance de sous-tension
La tension de l’accu est surveillée en permanence. Lorsqu’une tension déterminée de l’accu n’est pas atteinte (seuil
à env. 9,4 V), la DEL rouge commence à clignoter rapidement. La DEL verte est allumée. Cet affichage ne s’éteint que
lorsque l’accu est débranché. Lorsque la DEL rouge commence à clignoter, nous vous conseillons d’entamer rapidement
un atterrissage d’urgence et d’arrêter le vol.
Lorsqu’un accu pas complètement chargé est raccordé au QuadroCopter, vous pouvez également subir
des sous-tensions. Chargez, dans ce cas, l’accu complètement et essayez de redémarrer.
29
Page 30

13. Informations sur la carte Combi QC08
a) Contacts d’alimentation et cavaliers de la carte Combi
PAD1 : Raccordement soudé Plus pour la tension d’alimentation (+)
PAD2 : Raccordement soudé Moins pour la tension d’alimentation (-)
LD1 : Témoin de contrôle DEL verte
LD2 : Témoin de contrôle DEL rouge
X1 : Cavalier pour le ronfleur
X2 : Cavalier pour le mode d’éclairage
X3 : Contacts de raccordement des DEL ou bande de DEL 1 - 4
X4 : Contacts de raccordement des DEL ou bande de DEL 5 - 8
X5 : Contacts de raccordement pour le servo 1 (canal 5)
X6 : Contacts de raccordement pour le servo 2 (canal 6)
X7 : Contacts de raccordement pour le servo 3 (canal 7)
X8 : Contacts de raccordement pour le servo 4 (canal 8)
X9 : Contacts de raccordement pour un signal d’entrée RC externe
X10 : Règle de raccordement pour le câble plat d’interface
X11 : Cavalier pour la sélection d’interface
X12 : Interface sérielle
X13 : Prise de raccordement pour le câble du récepteur
X14 : Contacts de raccordement pour le signal cumulé
X15 : Prise de programmation pour les réglages liés à la production
SW1 : Cavalier pour la sélection d’entrée RC
SW2 : Touche de réinitialisation
BUZ1 : Ronfleur
X10
X10
BUZ1
SW2
X1
R23
R23
C14
C14
C15
C15
C12
C12
C13
C13
C8
C8
C9
C9
C10
C10
C11
C11
C16
C16
X12
X11
R7
R45
R1
R2
R2
SW1
X7
X8
LD2
R43
X2
R6
R3
R44
IC1
C1
Q1
Q1
C2
T3
T3
X3
T2
T2
T5
T5
T4
T4
LD1
R41
R42
R21
X4
X9
IC2
X5
X6
R22
X15
IC3
C3
30
X13
C17
R40
D1
C4
Q2
C18
C19
+
X14
PAD1
-
PAD2
Figure 15
Page 31

b) Sortie de signal
Le convertisseur de signal du ronfleur donne le
signal cumulé (SuS) au contact supérieur du
raccordement « X14 ».
Ce signal cumulé est constitué d’autant de signaux
individuels que ceux mesurés aux entrées.
Si vous utilisez, par exemple, un récepteur à 6
canaux, le signal cumulé a également 6 canaux.
L’identification du nombre de canaux se fait par la
mesure valide de signaux sur les entrées.
Les prises « SuS», « +5V » et « GND » doivent être
reliés avec les prises correspondantes de la platine
principale (figure 16b) dans le QuadroCopter.
Veillez à la polarité correcte des deux barres !
c) Témoin d´état DEL
Le convertisseur de signaux du ronfleur dispose
d’une DEL verte et d’une DEL rouge pour
l’affichage.
Une DEL verte allumée (LD1) indique que le
système électronique se trouve en mode de
fonctionnement normal. Ce qui signifie que des
signaux de servo peuvent être mesurés et
génèrent, le cas un échéant, un signal cumulé.
Si la DEL verte s’éteint, le système électronique a
un dysfonctionnement important.
Une DEL rouge allumée (LD2) indique l’absence
de signaux de servo. Les causes peuvent être, par
exemple, des perturbations de réception, un
manque d’alimentation électrique du récepteur, un
émetteur éteint ou un défaut de contact dans les
câbles de raccordement.
+
PAD1
X14
-
PAD2
+
PAD1
X14
-
PAD2
SuS
+5V
C18
GND
C19
C18
C19
X13
D1
LD2
R42
R41
X15
R43
R21
R22
X6
C4
R40
Q2
C17
LD1
IC3
Figure 16a
Figure 16b
X13
D1
Rot
LD1
C4
R40
Q2
C17
LD1
IC3
Rot
LD2
R42
R41
X15
R43
LD2
R21
R22
X6
Figure 17
31
Page 32

Comportement en cas de perturbations de réception
Le convertisseur de signal cumulé mesure la qualité des signaux et identifie ainsi les perturbations de réception.
Les canaux 1 - 4 étant principalement utilisés pour la commande de base des modèles réduits, nous insistons
particulièrement sur ces canaux.
Dysfonctionnement sur les canaux 1 - 4
Les canaux sont contrôlés au niveau de la largeur d’impulsion (entre 1 et 2 ms). Lorsqu’un défaut est constaté, le
signal cumulé est généré à partir des dernières valeurs valides.
Lorsque le taux d’erreur dépasse ce qui est acceptable pour une perception raisonnable, le convertisseur de signal
cumulé n’émet plus de signal cumulé et active la DEL rouge. Le problème de réception peut ainsi être identifié par la
logique en aval et les problèmes de réception ne peuvent être ignorés.
Lorsque le signal d’entrée est de nouveau valide, la DEL rouge s’éteint et un signal cumulé est généré.
Dysfonctionnement sur les canaux 5 - 8
Si la perturbation de réception ne touche que les canaux 5 - 8, le signal cumulé des canaux 1 - 4 continue à être
généré et les canaux 5 - 8 sont indiqués avec une longueur d’impulsion non valide.
La commande de base du modèle réduit est encore possible, le défaut peut cependant être identifié par la logique en
aval sur les canaux 5 - 8.
Lorsque le signal d’entrée est de nouveau valide, un signal cumulé régulier est émis.
d) Connexion avec l´interface
Pour raccorder la carte Combi à la carte de contrôle
du QuadroCopter, un câble de 26 fiches est fourni
avec la carte Combi. Il doit être raccordé à la règle
de raccordement pour le câble plat d’interface
(« X10 »).
Veillez, plus tard, lors du raccordement de la carte
Combi au QuadroCopter à ce que les deux règles
de raccordement pour le câble plat d’interface (carte
Combi et carte de commande) soient placées face
à face.
Le raccordement est alors effectué de la même
façon que le raccordement des deux platines
d’entraînement moteur avec la carte de contrôle.
IC2
X10
X10
C16
C9
C16
1
R2
R2
T4
T4
X9
X4
C8
C9
C8
C13
C10
C10
C13
C12
C12
C15
C15
C14
C14
R23
R23
C11
C11
26
T3
T5
T5
T3
T2
T2
X3
Q1
Q1
C2
C3
32
Figure 18
Page 33

e) Raccordement du servo
Une fois la carte Combi montée dans le QuadroCopter et la télécommande apprentie, vous pouvez
raccorder et commander, à l’aide de la
télécommande, quatre servos au maximum (canal
5 – 8).
Ceci n’est seulement possible que si l’émetteur et
le récepteur mettent cette fonction à disposition et
si les sorties du récepteur sont raccordées à la prise
de sortie du convertisseur de signal cumulé
(« X13 »).
Les contacts enfichés suivants sont prévus pour le
raccordement du servo :
X5 : Servo 1 (sortie récepteur/canal 5)
X6 : Servo 2 (sortie récepteur/canal 6)
X7 : Servo 3 (sortie récepteur/canal 7)
X8 : Servo 4 (sortie récepteur/canal 8)
Attention, lors du raccordement des servos, que le câble d’impulsion (PPM) soit toujours raccordé à la
broche supérieure des trois prises de contact !
R42
R41
X15
R43
PPM
LD2
+
-
R21
R22
X6
X11
X8
X7
PPM
+
X5
X10
X10
X12
SW1
IC2
X9
R2
R2
T
-
Figure 19
33
Page 34

14. Fonctionnement Light & Sound
a) Informations de base
La carte Combi est dotée, en plus du convertisseur de signal cumulé, huit sorties de DEL (« L1 » à « L8 »), ainsi que
trois entrées numériques (« IN-1 », « IN-2 », « IN-3 ») et une sortie RC externe (« PPM »).
La commande des sorties DEL peut être configurée par 7 modes différents.
Pour ce faire, soit le système électronique génère une trame fixe sur les orties, soit les sorties sont commutées en
fonction des signaux d’entrée. Les modes réglables par les cavaliers peuvent, de plus, être commutés en trois états à
l’aide d’un signal RC (canal 5, 6, 7, 8 ou externe). Ce qui permet une commutation en vol.
Entrées numériques :
Les entrées numériques activent les sorties correspondantes lorsque le mode correspondant a été sélectionné. Un
signal élevé (+5 V) signifie alors une sortie activée. La DEL raccordée ou la bande de DEL raccordée s’allume.
Les trois entrées numériques se trouvent sur la prose interface « X10 » et sont affectées comme suit :
IN-1 = Contact 6
IN-2 = Contact 5
IN-3 = Contact 16
X10
X10
C16
C9
C11
C11
IN-1
C10
C10
T5
T5
C8
C9
C8
C13
C13
C12
C12
C15
C15
C14
C14
R23
IN-3
T2
T2
R23
T3
T3
Q1
Q1
C16
IN-2
R2
R2
T4
T4
34
IC2
X9
X4
X3
C2
C3
Figure 20
Différents affichages d’état ou des messages d’erreurs du QuadroCopter peuvent être affichés visiblement
à l’aide des 3 entrées numériques. La fonctionnalité des signaux émis dépend cependant majoritairement
du Firmware utilisé et peut être modifiée en cas de développement ultérieur du QuadroCopter. Vous
trouverez une description détaillée de l’affectation des 3 entrées numériques dans le fichier Text du Firmware correspondant.
Page 35

Entrée RC :
f
f
f
f
f
f
f
L’entréee RC vous permet de mettre chaque mode d’éclairage dans trois états de commutation différents. Vous
pouvez utiliser pour cela un convertisseur à position centrale (Haut, Neutre, Bas) ou un régulateur linéaire ou rotatif.
Pour commuter les modes d’éclairage, vous pouvez utiliser le canal 5 - 8 ou un signal de servo alimenté de l’extérieur
(PPM).
Vous obtenez, en lien avec les 7 modes d’éclairage différents, le modèle d’éclairage suivant :
Mode PPM L1 L2 L3 L4 L5 L6 L7 L8 Ronfleur
Elevé IN-1 IN-2 IN-3 DF SF SB DF Bat Bat
1 Neutre IN-1 IN-2 IN-3 DF SF SB Of
Faible IN-1 IN-2 IN-3 DF SF SB On Bat Bat
Elevé IN-1 IN-2 IN-3 DF SF SB DF Bat IN-3
2 Neutre IN-1 IN-2 IN-3 DF SF SB Of
Faible IN-1 IN-2 IN-3 DF SF SB On Bat IN-3
Elevé Lumière défilante L1 vers L8 IN-3
3 Neutre Of
Faible Lumière défilante L8 vers L1 IN-3
Elevé Lumière défilante inversée L1 vers L8 IN-3
4 Neutre Of
Faible Lumière défilante inversée L8 vers L1 IN-3
Elevé Lumière défilante L1 vers L4 IN-1 IN-3 SB Bat IN-3
5 Neutre Of
Faible Lumière défilante L4 vers L1 IN-1 IN-3 SB Bat IN-3
Elevé Lumière défilante inversée L1 vers L4 IN-1 IN-3 SB Bat IN-3
6 Neutre Of
Faible Lumière défilante inversée L4 vers L1 IN-1 IN-3 SB Bat IN-3
Elevé WB1 WB2 IN-1 IN-2 IN-3 SF DF Bat IN-3
7 Neutre WB1 WB2 IN-1 IN-2 IN-3 SF Of
Faible WB1 WB2 IN-1 IN-2 IN-3 SF On Bat IN-3
IN-1 IN-3 SB Bat IN-3
IN-1 IN-3 SB Bat IN-3
Bat Bat
Bat IN-3
IN-3
IN-3
Bat IN-3
Signification des abréviations :
SB : Slow Blink (400 ms en service, 400 ms à l’arrêt)
FB : Fast Blink (200 ms en service, 200 ms à l’arrêt)
SF : Single Flash (50 ms, 1 s pause)
DF : Double Flash (50 ms, 50 ms, 1 s pause)
Bat : Alerte de batterie à 5 niveaux (>9,4 V = OFF; <9,4 V = SF; <9,2 V = DF; <9,0 V = SB; <8,8 V = FB)
WB1, WB2 : Clignotement alterné (alternance toutes les 100 ms)
Vitesse de lumière courante : Alternance toutes les 100 ms
35
Page 36

b) Sélection du mode d’éclairage
Vous pouvez régler les 7 modes d’éclairage à l’aide du cavalier (« X2 »). En fonction du mode souhaité, les différents
contacts doivent être raccordés avec un cavalier de court-circuit (Jumper). Les différents ponts doivent être définis
pour les modes correspondants :
Mode 1 : aucun cavalier
R45
R44
BUZ1
1
X1
R7
R6
R3
X2
2
Mode 2 : Cavalier 1 - 2
Mode 3 : Cavalier 3 - 4
Mode 4 : Cavalier 1 - 2 et cavalier 3 - 4
Mode 5 : Cavalier 1 - 3
Mode 6 : Cavalier 2 - 4
Mode 7 : Cavalier 1 - 3 et cavalier 2 - 4
C12
C12
C15
C15
C14
C14
T3
T3
R23
R23
SW2
R1
Q1
Q1
C1
X3
C2
C3
IC1
3
5
4
6
Figure 21
36
Page 37

c) Sélection de l’entrée RC
Vous pouvez régler l’entrée RC souhaitée pour commuter les effets de lumière à l’aide du cavalier SW1. Pour cela,
vous devez toujours raccorder le contact supérieur et le contact inférieur avec un cavalier (jumper).
L’affectation est alors la suivante :
Sélection de servo 1 = canal 5
Sélection de servo 2 = canal 6
Sélection de servo 3 = canal 7
Sélection de servo 4 = canal 8
R42
R41
X15
R43
LD2
R21
R22
X6
X11
X8
X7
PPM
1
X12
2
SW1
X5
Sur la figure ci-contre, le cavalier est mis sur la Sélection de servo 1. La commutation du mode d’éclairage sélectionné
peut être effectuée uniquement sur l’émetteur par le canal 5 La commande par les canaux 5, 6, 7 ou 8 n’est cependant
possible que si elle est effectuée par la commande principale. La génération de signaux est indépendante du
convertisseur de signal cumulé !
Si ce n’est pas le cas, vous pouvez alimenter directement, au contact de raccordement gauche de la prise « X9 », un
signal de servo externe (PPM) d’une sortie de récepteur non encore affectée (p.ex. canal 9). Si vous n’utilisez aucune
entrée RC et vous passez de la possibilité de commuter, l’état de commutation PPM « High » est toujours actif !
3
IC2
X9
X10
X10
4
R2
R2
Figure 22
T
37
Page 38

d) Raccordement de la bande de DEL/des DEL
La carte Combi vous permet de raccorder directement 8 bandes de DEL maximum avec une tension de service de 12
V et une puissance absorbée maximale de 1 A par bande. Même si les sorties de commutation MOSFET (FDS6890A)
peuvent supporter jusqu’à 7,5 A, nous vous recommandons de ne pas les solliciter à plus de 1 A, à cause de la
configuration de la carte et du refroidissement.
Si vous souhaitez raccorder des DEL individuellement avec une tension de service de 2 – 3 V seulement, vous devez
prévoir une prérésistance (Rv) adaptée. Pour le calcul de la prérésistance, nous vous conseillons de travailler avec
une tension de service de 12 V, car les accus LiPo à 3 cellules rechargés peuvent indiquer plus de 12 V au lieu des
11,1 V prévus.
Exemple de calcul :
Supposons que la diode utilisée dispose d’une tension d’alimentation de 2,6 V et d’une puissance absorbée de 20
mA. Vous devez tout d’abord calculer la tension sur la prérésistance :
12 V - 2,6 V = 9,4 V
Si vous souhaitez activer deux mêmes diodes l’une après l’autre, vous devez extraire 2 x 2,6 V = 5,2 V de la tension
d’alimentation de 12 V (12 V - 5.2 V = 6.8 V).
Avec trois diodes identiques, vous devez extraire 3 x 2.6 V = 7.8V de la tension d’alimentation de 12 V (12 V - 7.8 V =
4.2 V).
Vous pouvez alors suivre la loi ohmique R = U : et calculer I la prérésistance Rv :
Rv = 9,4 V : 0,02 A = 470 Ohm
D’après la formule P = U x I, vous pouvez également calculer la puissance que la prérésistance doit supporter :
9,4 V x 0,02 A = 0,188 W
Une résistance de ¼ W (0,25 W) serait donc suffisante. Pour raccorder les DEL ou bandes de DEL, vous devez
prévoir les contacts de raccordement supérieurs des prises « X3 » (« L1 » à « L4 ») et « X4 » (« L5 » à « L8 »). Les
contacts de raccordement inférieurs sont raccordés à la prise Plus (+) de l’accu d’entraînement (11,1 V de l’accu
LiPo).
X10
IC2
X10
C16
C11
C10C9C8
C13
C12
C15
C16
C11
C10C9C8
R2
R2
X9
L5
L6
T5
T5
T4
T4
L8
L7
X4
-
+
12 V
-
C13
T2
T2
L1
C14
C12
C15
C14
R23
R23
T3
T3
Q1
Q1
L3
L2
X3
+
Rv
C2
C3
LED
L4
Figure 23
Schéma de raccordement
La figure 23 vous indique le schéma de
raccordement d’une DEL avec prérésistance à la
sortie « L1 » et le raccordement d’une barre
lumineuse de 12 V au raccordement « L7 ».
Important !
Veillez à la polarité correcte des règles
de raccordement, lors du raccordement
de DEL et de barres lumineuses DEL.
Dans la pratique, les douilles BEC confectionnées
à cosses ouvertes sont très bien adaptées au
raccordement de DEL.
38
Page 39

e) Configuration du ronfleur
Le ronfleur peut être mis en ou hors service à l’aide
du cavalier (« X1 »).
Lorsque les contacts 1 et 2 sont reliés par un
cavalier, le ronfleur est hors service.
Lorsque les contacts 2 et 3 sont reliés par un
cavalier, le ronfleur est en service et émet les
signaux conformément au tableau des modes.
C12
C12
C15
C15
C14
C14
T3
T3
R23
R23
SW2
BUZ1
3
X1
2
R44
R7
1
R6
R3
X2
R45
R1
Q1
Q1
C1
X3
C2
C3
IC1
Figure 24
39
Page 40

15. Raccordement au PC de la carte Combi
La carte Combi, tout comme la carte de commande du QuadroCopter sont équipées d’une interface sérielle. Les
systèmes électroniques peuvent communiquer avec un PC par ces deux interfaces.
Vous pouvez, à l’aide du cavalier « X11 », faire communiquer l’interface de série de la carte Combi soit par le câble
interface à 26 poles avec la carte de commande du QuadroCopter (2ème interface interne) , soit l’activer sur la prise
interface « X12 ». Cette fonction est utilisée pour de futures extensions et est actuellement non utilisée.
Lorsque les contacts 1 et 2 sont reliés par un cavalier, l’interface sur la carte de commande du QuadroCopter est
active.
Lorsque les contacts 2 et 3 sont reliés par un cavalier, l’interface sur la carte Combi (« X12 ») est active.
Vous trouverez l’affectation des broches de la prise interface « X12 », sur la figure 25.
3
2
1
X10
X10
R42
R41
X15
R43
LD2
R21
R22
X6
X11
X8
X7
GND
TXD RXD
X5
X12
SW1
IC2
X9
R2
R2
+5V
Figure 25
T
40
Page 41

16. Informations concernant le premier démarrage
a) Comportement général de pilotage
D’une manière générale, le comportement de pilotage d’un QuadroCopter est le même que celui d’un hélicoptère
normal. Les détails font la différence. Sur les hélicoptères, la compensation de couple est stabilisée par des gyroscopes
spéciaux (dans la fonction Gier). Il existe deux systèmes différents : Les « Gyroscopes normaux » et les gyroscopes
avec fonction « Heading Lock ».
Les gyroscopes normaux stabilisent (amortissent) le rotor arrière des rotations générées par le pilote (modifications
de vitesses de rotation ou de pas) ou par des influences extérieures (vent de côté, p.ex.). Les gyroscopes à « Heading
Lock » ont, quand à eux, un « Effet de retenue » sur ces rotations. Les deux systèmes réagissent suite à une commande,
p.ex. « Gier à gauche », puis position neutre avec arrêt immédiat de la rotation.
Votre QuadroCopter est équipé de - contrairement aux hélicoptères normaux - trois gyroscopes sur les fonctions Gier,
Nick et Roll. Les gyroscopes montés sont - si on les compare aux gyroscopes conventionnels - ni des « Gyroscopes
normaux » ni des gyroscopes à « Heading Lock ».
Les gyroscopes du QuadroCopter sont reliés entre eux, de manière à ce que le QuadroCopter essaye toujours, après
une commande, de revenir en position neutre (vol stationnaire). La réussite de cette tentative dépend, bien sûr, de la
place disponible, de la vitesse de col et de l’état actuel du vol, des valeurs de compensation du QuadroCopter ainsi
que des conditions extérieures de vol, comme le vent, p.ex.
b) Démarrage des moteurs
Important !
Mettez le levier des gaz sur « Arrêt moteurs » et tous les leviers de compensation des levier de commande
en position centrale, avant de mettre l’émetteur en service. Vous risquez, dans le cas contraire, que le
QuadroCopter ne reconnaisse pas l’émetteur après le raccordement de l’accu de propulsion.
• Après le raccordement de l’accu de propulsion, les DEL indiquent « Ready to Fly ».
• GAZ à zéro, GIER en butée complète à gauche, NICK et ROLL sur neutre (voir également la figure 10)
• Les rotors commencent à tourner l’un après l’autre et passent en vitesse à vide
• La DEL rouge est allumée en continu et la DEL verte clignote (« Moteurs en marche »)
• Augmenter légèrement les GAZ pour lever l’appareil (vol stationnaire)
c) Arrêt des moteurs
Les moteurs en marche peuvent être arrêtés de la manière suivante :
• GAZ à zéro, GIER en butée complète à droite, NICK et ROLL sur neutre
• Les rotors s’arrêtent
• La DEL rouge est éteinte, la DEL verte est allumée en continu (« Ready to Fly »)
41
Page 42

d) Vol stationnaire
Pour expliquer plus simplement et unanimement la commande, les termes classiques sont utilisés ici. Ils
viennent du jargon des pilotes et sont bien connus.
Les indications de direction sont toujours énoncés du point de vue d’un pilote « virtuel ». La console avec la flèche
collée est considérée comme l’« avant ». Les explications se basent toutes sur la configuration en mode 2.
Le « Vol stationnaire » est le vol dans lequel le QuadroCopter ne monte ni ne descend, la force d’entraînement vers le
haut est identique à la force d’entraînement vers le bas. Ce vol est effectué généralement en position neutre des gaz
(en fonction, cependant, d’une éventuelle charge utile).
Lors des vols juste au-dessus du sol ainsi que lors des démarrages, des turbulences et courants d’air
surviennent et influencent le QuadroCopter. Il réagit alors plus rapidement aux mouvements de pilotage et
le QuadroCopter part alors légèrement vers l’avant, l’arrière ou les côtés.
e) Gier
Le « Gier » est la rotation du QuadroCopter sur
l’axe de hauteur (axe vertical). Ce mouvement
survient soit involontairement causé par le couple
des rotors, soit volontairement en cas de
modification de la direction du vol. Sur le QuadroCopter, ce mouvement n’est pas contrôlé par un
rotor arrière, mais par la modification de vitesse de
rotation des rotors entre eux.
Le point (1) indique l’« avant ».
f) Nick
Le « Nick » est le mouvement autour de l’axe transversal, comme le mouvement opinant d’une tête.
Le QuadroCopter gagne alors en vitesse vers
l’avant ou vers l’arrière, ou freine.
Le point (1) indique l’« avant ».
42
Figure 26
Figure 27
Page 43

g) Roll
Le « Roll » est le mouvement autour de l’axe longitudinal, il est comparable au roulement latéral
d’une bille (ou à la manière d’avancer d’un crabe).
Le QuadroCopter se déplace par le soulèvement
de son côté gauche indépendamment de son
avancée vers la droite.
Le point (1) indique l’« avant ».
Figure 28
43
Page 44

17. Le premier vol
Important !
Mettez le levier des gaz sur « Arrêt moteurs » et tous les leviers de compensation des levier de commande
en position centrale, avant de mettre l’émetteur en service. Vous risquez, dans le cas contraire, que le
QuadroCopter ne reconnaisse pas l’émetteur après le raccordement de l’accu de propulsion.
Allumez la radiocommande. Raccordez l´accu de propulsion. Le QuadroCopter effectue et acquitte un auto-test avec
la DEL verte qui s’allume en continu. En cas de défaut, les DEL clignotent. En cas de défaut, débranchez l’accu et
après avoir résolu le problème (p.ex. Gaz pas sur la position neutre), puis rebranchez-le. En cas de défaut, les
moteurs ne peuvent pas démarrer, pour des raisons de sécurité.
Veillez à ce que le QuadroCopter soit bien à l’horizontale lorsque vous branchez l’accu. Jusqu’à ce que la DEL verte
s’allume, tous les détecteurs sont compensés et le QuadroCopter ne doit pas bouger. Si l’emplacement n’est pas plat
au démarrage, nous vous conseillons d’effectuer la compensation sur un support horizontal et d’enregistrer la position
neutre avec Plein Gaz/Gier droit (voir le chapitre « Réglage de la position neutre »).
Démarrez les moteurs (Gaz à zéro, Gier gauche) et laisser les tourner à l’arrêt. Contrôlez de nouveau que le
fonctionnement des rotors. Tous les rotors doivent tourner régulièrement au même niveau sans que le QuadroCopter
ne vibre. Si l’un des moteurs ne démarre pas, éteignez les moteurs et bougez le rotor du moteur qui n’a pas démarré
d’un quart de tour à la main. Puis redémarrez les moteurs.
La vitesse de rotation des rotors (le gaz) du QuadroCopter devrait augmenter lentement, jusqu’à ce que l’appareil
commence à se lever. Testez les directions Roll et Nick juste avant que le QuadroCopter commence à planer afin de
vous assurer que l’émetteur est bien réglé et qu’aucun canal n’est inversé (les signaux de commande sont du mauvais
côté). Évitez, d’une manière générale, les mouvements de pilotage brusques et grands. Surveillez si et dans quelle
direction le QuadroCopter se déplace. Vous pouvez compenser les mouvements intempestifs avec la compensation
de la télécommande.
Important !
Ne démarrez jamais un engin volant mal compensé.
Augmentez alors les gaz jusqu’à ce que le QuadroCopter se trouve à au moins un mètre du sol. Essayez alors de
corriger les décalages légers avec les leviers de compensation de Gier, Nick ou Roll.
Dès que le QuadroCopter est assez haut, enlevez le gaz jusqu’à ce que le QuadroCopter soit en vol stationnaire.
Vous avez réussi la partie la plus critique et vous pouvez vous familiariser lentement et avec des mouvements de gaz
modérés avec le QuadroCopter. Pour faire atterrir le QuadroCopter, enlevez des gaz jusqu’à ce que le QuadroCopter
descende au sol. Si l’arrivée au sol est un peu brutale, cela ne pose pas de problème, n’essayez pas de corriger
l’arrivée par des mouvements de gaz brusques.
Essayez d’atterrir le plus à l’horizontale possible (« Pose d’hélicoptère »). Évitez les atterrissages à grande vitesse
horizontale (« Atterrissage d’avion »). Après l’atterrissage, éteignez les moteurs (appuyez le levier des gaz vers la
droite et le bas).
Entraînez-vous plusieurs fois à effectuer ce démarrage pour vous familiariser avec le QuadroCopter. Dès que vous
vous sentez un peu plus sûr de vous, vous pouvez commencer à piloter la direction avec les fonctions Gier, Nick et
Roll. Pilotez toujours doucement et avec sensibilité et entraînez-vous avant d’attaquer une nouvelle manoeuvre. Les
premiers vols ne devraient pas durer plus de 30 à 60 secondes.
44
Page 45

18. Maintenance, entretien et réparation
a) Nettoyage régulier
Le QuadroCopter est un engin volant très simple mais très bien pensé. Aucune de ces pièces mécaniques n’a besoin
de lubrification ou d’un autre entretien. Nettoyez cependant le QuadroCopter après chaque vol pour en enlever les
éventuelles salissures (herbe, poussière, etc.).
Nettoyez avec un chiffon sec ou légèrement humide et évitez le contact du système électronique, de l’accu et des
moteurs avec l’eau.
N’effectuez jamais de vol sans le capot du système électronique. Veillez à ce que l’humidité ne puisse pas pénétrer à
l’intérieur de la pièce centrale (brins d’herbe mouillés, p.ex.). Ne volez jamais par temps de pluie !
b) Remplacement des rotors
Si un rotor est endommagé suite à une chute ou à un évènement extérieur, vous devez le remplacer aussitôt. Ceci est
également valable si vous détectez des fissures fines ou capillaires sur un rotor. Les vitesses de rotation élevées
pourraient générer, si les rotors sont endommagés, que des pièces se détachent et puissent abîmer ou mettre en
danger l’environnement.
Pour remplacer un rotor, enlevez la pointe de rotor avec la rondelle élastique ainsi que le rotor endommagé. Pour
monter le nouveau rotor, procédez comme décrit au chapitre « Montage final du QuadroCopter » qui décrit le montage
des rotors.
Attention !
Vérifiez impérativement le sens de rotation du moteur concerné et la sélection du rotor adapté. Si vous
choisissez le mauvais rotor, le modèle réduit ne peut pas voler et un dysfonctionnement apparaît lors du
prochain démarrage du modèle réduit ! Perte de la garantie !
c) Remplacement d’un moteur
Lorsqu’un moteur est endommagé (surchauffe, défaut électrique ou problème de roulement) vous devez absolument
le remplacer. Suivez alors les étapes suivantes :
• Enlevez le rotor du moteur endommagé.
• Enlevez le capot supérieur, la plaque de renfort et la partie supérieur du châssis grillagé en dévissant les raccords
vissés supérieurs. Vous avez alors accès au pilote du moteur (Driverboard). Vous pouvez également la sortir avec
précaution de son support pour avoir plus de place.
• Notez les couleurs du câble de raccordement du moteur aux points de soudage A, B et C et déssoudez les câbles.
• Desserrez les vis du support moteur et détachez le moteur de son support. Sortez le câble par la console.
• Prenez le nouveau moteur et passez le câble de raccordement par la console. Revissez le moteur et soudez le
câble en suivant le tableau de couleurs que vous avez préparé.
45
Page 46

Attention !
Si vous intervertissez les couleurs du câble de raccordement, le sens de rotation du moteur est inversé.
Cela entraîne des dysfonctionnements du modèle réduit ! Comparez donc, par précaution, l’affectation
des autres moteurs avec celle du moteur remplacé. Perte de la garantie !
• Remettez la Driverboard dans son support, vérifiez que le câble plat de liaison avec la carte de contrôle est bien fixé
et remontez la partie supérieure du châssis grillagé.
• Si vous souhaitez remplacer plusieurs moteurs, répétez ces étapes pour chaque moteur.
d) Remplacement d’une console
Vous pouvez remplacer une console si elle est endommagée. Suivez les mêmes étapes que celles du « Remplacement
d’un moteur ». Une fois le moteur enlevé de la console endommagée, refixez le moteur sur la nouvelle console et
terminez les étapes décrites.
Enlevez la partie supérieure du châssis grillagé pour remplacer une console. Pour enlever la console, tournez la
légèrement et sortez-la du châssis grillagé.
e) Remplacement du châssis complet
Si une chute a provoqué une casse, mais que le système électronique fonctionne, vous pouvez remplacer le châssis
complet.
Enlevez simplement les capots supérieur et inférieur, la plaque de renfort et la partie supérieure du châssis grillagé,
puis les moteurs, comme décrit sous « Remplacement d’un moteur » et montez les moteurs dans la nouvelle console.
Sortez le système électronique du support et montez-le dans le nouveau châssis grillagé. Montez alors la nouvelle
console dans le nouveau châssis grillagé.
f) Remplacement de la plaque de stabilisation
Vous pouvez remplacer une plaque de stabilisation si elle est endommagée. Suivez les mêmes étapes que celles du
« Remplacement du châssis complet ».
Desserrez les raccords vissés de la plaque de stabilisation avec le châssis et les bandes auto-agrippantes. Remplacez
la plaque de stabilisation endommagée par la plaque neuve et revissez la. Fixez ensuite les consoles à l’aide des
bandes auto-agrippantes à la plaque de stabilisation.
Vous trouverez la liste des pièces détachées sur notre site Internet www.conrad.com dans la section
téléchargement du produit respectif.
46
Page 47

19. Elimination
a) Généralités
Evacuez le produit en fin de vie conformément aux directives légales en vigueur.
b) Piles et accumulateurs
Le consommateur final est légalement tenu (ordonnance relative à l´élimination des piles usagées) de rapporter
toutes les piles et accumulateurs usés, il est interdit de les jeter dans les ordures ménagères !
Les piles et accumulateurs qui contiennent des substances toxiques sont caractérisés par les symboles
ci-contre qui indiquent l´interdiction de les jeter dans les ordures ménagères. Les désignations pour le
métal lourd prépondérant sont : Cd = cadmium, Hg = mercure, Pb = plomb (vous trouverez la désignation
sur la pile/accu, par ex. au-dessous des symboles de poubelles figurant à gauche).
Vous pouvez rapporter gratuitement vos piles/accumulateurs usagés aux centres de récupération de votre
commune, à nos succursales ou à tous les points de vente de piles et d’accumulateurs.
Vous répondez ainsi aux exigences légales et contribuez à la protection de l’environnement.
47
Page 48

20. Caractéristiques techniques
Dimensions
Diamètre sans rotors : ............................................... 650 mm
Hauteur totale rabattu : ............................................. 285 mm
Poids : ........................................................................ env. 1 100 g accus compris
Poids maximal au décollage : ................................... 2000 g (cette valeur ne doit pas être dépassée !)
Données électriques
Tension d’alimentation : ............................................. 9 - 12 V (Accu LiPo à 3 cellules)
Accu de propulsion recommandé : ........................... LiPo, 3 cellules, 2500 mAh, 25C
Radiocommande nécessaire : .................................. 6 canaux
Performances
Puissance absorbée moyenne par moteur : ............. env. 7 - 14 A
Courant maxi. par moteur : ....................................... env. 19 A
Course par moteur : .................................................. max. 900 g
Environnement de fonctionnement
Zone de fonctionnement : ......................................... Intérieur et extérieur (temps sec, pas de précipitation)
Vent en vol :............................................................... Pas de vent à vent faible
Température ambiante : ............................................ +10 °C à +40 °C
Humidité de l´air : ...................................................... 80% maximum, sans condensation
48
Page 49

495051
Page 50

Page 51

Page 52

Information légales
Ce mode d'emploi est une publication de la société Conrad Electronic SE, Klaus-Conrad-Str. 1, D-92240 Hirschau
(www.conrad.com).
Tous droits réservés, y compris de traduction. Toute reproduction, quelle qu'elle soit (p. ex. photocopie, microfilm, saisie dans des
installations de traitement de données) nécessite une autorisation écrite de l'éditeur. Il est interdit de le réimprimer, même par
extraits.
Ce mode d'emploi correspond au niveau technique du moment de la mise sous presse. Sous réserve de modifications techniques
et de l'équipement.
© Copyright 2010 by Conrad Electronic SE.
V1_1110_01
 Loading...
Loading...