

QuadroCopter „650“ ARF
Best.-Nr.: 20 93 00
Bedienungsanleitung
¨
¨
Version 11/10

1. Einführung ........................................................................................................................................................... 4
2. Bestimmungsgemäße Verwendung .................................................................................................................... 5
3. Produktbeschreibung .......................................................................................................................................... 5
4. Lieferumfang ........................................................................................................................................................ 6
5. Symbol-Erklärung ................................................................................................................................................ 7
6. Sicherheitshinweise ............................................................................................................................................. 7
7. Batterie- und Akku-Hinweise ............................................................................................................................. 10
8. Endmontage des QuadroCopters ..................................................................................................................... 12
9. Überprüfen der Konfiguration ............................................................................................................................ 18
10. Vor jeder Inbetriebnahme .................................................................................................................................. 25
11. Sicherheitseinrichtungen ................................................................................................................................... 27
Inhaltsverzeichnis
a) Allgemein ....................................................................................................................................................... 7
b) Vor der Inbetriebnahme ................................................................................................................................ 8
c) Während des Betriebs .................................................................................................................................. 8
a) Sender ......................................................................................................................................................... 10
b) Flugakku ...................................................................................................................................................... 11
a) Montage der Landebeine ............................................................................................................................ 12
b) Montage der Rotoren .................................................................................................................................. 14
c) Anschluss des Empfängers ........................................................................................................................ 15
d) Montage des Flugakkus .............................................................................................................................. 16
e) Montage der oberen Abdeckhaube ............................................................................................................ 17
a) Allgemein ..................................................................................................................................................... 18
b) Erkennen der Kanäle vom Sender (allgemein) .......................................................................................... 19
c) „Gas“ erlernen ............................................................................................................................................. 20
d) „Gier“ erlernen ............................................................................................................................................. 20
e) „Nick“ erlernen ............................................................................................................................................. 20
f) „Roll“ erlernen.............................................................................................................................................. 21
g) Einstellung des Flugmodus ......................................................................................................................... 22
h) Konfiguration mit PC-Software ................................................................................................................... 23
i) Mögliche Fernsteuermodi ........................................................................................................................... 24
a) Überprüfen der Verschraubungen .............................................................................................................. 25
b) Überprüfen der beweglichen Teile .............................................................................................................. 25
c) Abgleich der Neutrallage ............................................................................................................................. 25
a) Motorschutz ................................................................................................................................................. 27
b) Notlandung .................................................................................................................................................. 27
c) Unterspannungsüberwachung .................................................................................................................... 27
d) Finderfunktion ............................................................................................................................................. 27
Seite
2

Seite
12. LED-Anzeigen ................................................................................................................................................... 28
a) Ready to Fly ................................................................................................................................................ 28
b) Start des QuadroCopters ............................................................................................................................ 28
c) Konfigurationsmodus .................................................................................................................................. 28
d) RC-Offsetabgleich ....................................................................................................................................... 28
e) Abgleich der Neutrallage ............................................................................................................................. 28
f) Gestörte Funkverbindung vor dem Start .................................................................................................... 28
g) Gestörte Funkverbindung im Flugbetrieb ................................................................................................... 29
h) Notlandefunktion ......................................................................................................................................... 29
i) Unterspannungsüberwachung .................................................................................................................... 29
13. Informationen zum Combiboard QC08 ............................................................................................................. 30
a) Anschlusskontakte bzw. Jumper-Stecker des Combiboards ..................................................................... 30
b) Summensignal-Ausgang ............................................................................................................................. 31
c) LED-Statusanzeige ..................................................................................................................................... 31
d) Interface-Anschluss ..................................................................................................................................... 32
e) Servo-Anschluss ......................................................................................................................................... 33
14. Funktionsweise Light & Sound.......................................................................................................................... 34
a) Grundsätzliche Informationen ..................................................................................................................... 34
b) Auswahl des Lichtmodus ............................................................................................................................ 36
c) Auswahl des RC-Eingangs ......................................................................................................................... 37
d) Anschluss der LED-Streifen/LEDs .............................................................................................................. 38
e) Summer-Konfiguration ................................................................................................................................ 39
15. PC-Anschluss des Combiboards ...................................................................................................................... 40
16. Informationen zum ersten Start .........................................................................................................................41
a) Allgemeines Steuerverhalten...................................................................................................................... 41
b) Starten der Motoren .................................................................................................................................... 41
c) Stoppen der Motoren .................................................................................................................................. 41
d) Schwebeflug ................................................................................................................................................42
e) Gier .............................................................................................................................................................. 42
f) Nick .............................................................................................................................................................. 42
g) Roll .............................................................................................................................................................. 43
17. Der erste Flug ....................................................................................................................................................44
18. Wartung, Pflege und Reparatur ........................................................................................................................ 45
a) Regelmäßige Reinigung ............................................................................................................................. 45
b) Austausch der Rotoren ............................................................................................................................... 45
c) Austausch eines Motors .............................................................................................................................. 45
d) Austausch eines Auslegers......................................................................................................................... 46
e) Austausch des kompletten Rahmens ......................................................................................................... 46
f) Austausch der Stabilisierungsplatte ............................................................................................................ 46
19. Entsorgung ........................................................................................................................................................ 47
a) Allgemein ..................................................................................................................................................... 47
b) Batterien und Akkus .................................................................................................................................... 47
20. Technische Daten .............................................................................................................................................. 48
3

1. Einführung
Sehr geehrte Kundin, sehr geehrter Kunde,
wir bedanken uns für den Kauf dieses Produkts.
Dieses Produkt erfüllt die gesetzlichen, nationalen und europäischen Anforderungen.
Um diesen Zustand zu erhalten und einen gefahrlosen Betrieb sicherzustellen, müssen Sie als Anwender diese Bedienungsanleitung beachten!
Diese Bedienungsanleitung gehört zu diesem Produkt. Sie enthält wichtige Hinweise zur Inbetriebnahme und Handhabung. Achten Sie hierauf, auch wenn Sie dieses Produkt an Dritte weitergeben.
Heben Sie deshalb diese Bedienungsanleitung zum Nachlesen auf!
Alle enthaltenen Firmennamen und Produktbezeichnungen sind Warenzeichen der jeweiligen Inhaber. Alle Rechte
vorbehalten.
Bei technischen Fragen wenden Sie sich bitte an:
Tel.: 0180/5 31 21 11
Fax: 0180/5 31 21 10
E-Mail: Bitte verwenden Sie unser Formular im Internet: www.conrad.de, unter der Rubrik „Kontakt“.
Mo. bis Fr. 8.00-18.00 Uhr
www.conrad.at
www.business.conrad.at
Tel.: 0848/80 12 88
Fax: 0848/80 12 89
E-Mail: support@conrad.ch
Mo. bis Fr. 8.00-12.00, 13.00-17.00 Uhr
4

2. Bestimmungsgemäße Verwendung
Der „QuadroCopter 650 ARF“ ist ein modellhubschrauberähnliches Flugmodell; es ist ausschließlich für den privaten
Einsatz im Modellbaubereich und für die damit verbundenen Betriebszeiten ausgelegt.
Für einen anderen Einsatz ist dieses System nicht geeignet. Eine andere Verwendung als zuvor beschrieben kann zur
Beschädigung des Produktes mit den damit verbundenen Gefahren wie z.B. Kurzschluss, Brand, elektrischer Schlag
etc. führen. Die Sicherheitshinweise sind unbedingt zu befolgen! Das Produkt darf nicht feucht oder nass werden!
Das Produkt ist kein Spielzeug, es ist nicht für Kinder unter 14 Jahren geeignet.
Beachten Sie alle Sicherheitshinweise dieser Bedienungsanleitung. Diese enthalten wichtige Informationen zum Umgang mit dem Produkt.
Sie allein sind für den gefahrlosen Betrieb des Modells verantwortlich! Das Chassis ist flugfertig aufgebaut.
3. Produktbeschreibung
Bei dem Elektroflugmodell „QuadroCopter 650 ARF“ handelt es sich um ein weitestgehend vormontiertes Flugobjekt.
Im professionellen Bereich werden solche Fluggeräte bereits für verschiedenste Aufgaben eingesetzt. Modernste
mikroprozessorgesteuerte Elektronik mit Lageregelung und Beschleunigungssensoren stabilisieren den QuadroCopter.
Hochwertige bürstenlose Gleichstrommotoren in Verbindung mit einer speziell entwickelten Ansteuerung ermöglichen
einen langen, kraftvollen Flugbetrieb und geben jede Menge Reserve für Nutzlasten wie z.B. Kameras etc. Durch die
neuartige Steuerung und die elektronische Selbststabilisierung ergeben sich hervorragende Flugeigenschaften. Verschiedene Flugprogramme sorgen dafür, dass sowohl Einsteiger als auch Profis sehr rasch ihre Freude haben.
Der QuadroCopter kann sowohl in Hallen als auch im Freien betrieben werden. Die eingebauten elektronischen
Regelungen können zwar kleinere unerwünschte Änderungen der Fluglage abfangen, jedoch nicht vollkommen unwirksam werden lassen. Da das Gewicht eines QuadroCopters relativ niedrig ist, reagiert dieser sensibel auf Wind.
Ideale Flugbedingungen sind daher völlige Windstille bis sehr leichter und gleichmäßiger Wind.
Der Designerrahmen in Leichtbauweise mit Aluminium- und Kunststoffkomponenten ist stabil und ermöglicht hervorragende Flugeigenschaften. Der Rahmen ist klappbar und damit einfach und platzsparend zu transportieren. Der
Designerrahmen nimmt die komplette Elektronik auf und hat Platz für Erweiterungsplatinen. Durch die Gitterbauweise
ergeben sich bei geringem Gewicht eine hohe Festigkeit und ein guter Schutz für die Elektronik.
Das Modell ist aufgrund seiner Auslegung für den erfahrenen Modellhubschrauberpiloten konzipiert, der mit dem
QuadroCopter nicht nur hubschauberähnliche, sondern auch aufsehen erregende Flüge absolvieren will.
Das extrem wendige Modell ist aber auch für Modellflugeinsteiger geeignet. Für Einsteiger empfehlen wir jedoch vor
dem ersten Flug ein entsprechendes Training an einem Flugsimulator für Helikopter bzw. die aktive Hilfe eines erfahrenen Modellhelikopterpiloten.
Das Modell bietet die Möglichkeit von Erweiterungen mittels zusätzlicher Elektronik (Erweiterungs-Schnittstelle auf
der Steuereinheit vorhanden) und den Anbau von diversen Mechaniken an der Plattformhalterung auf der Unterseite
des Gitterrahmens.
5
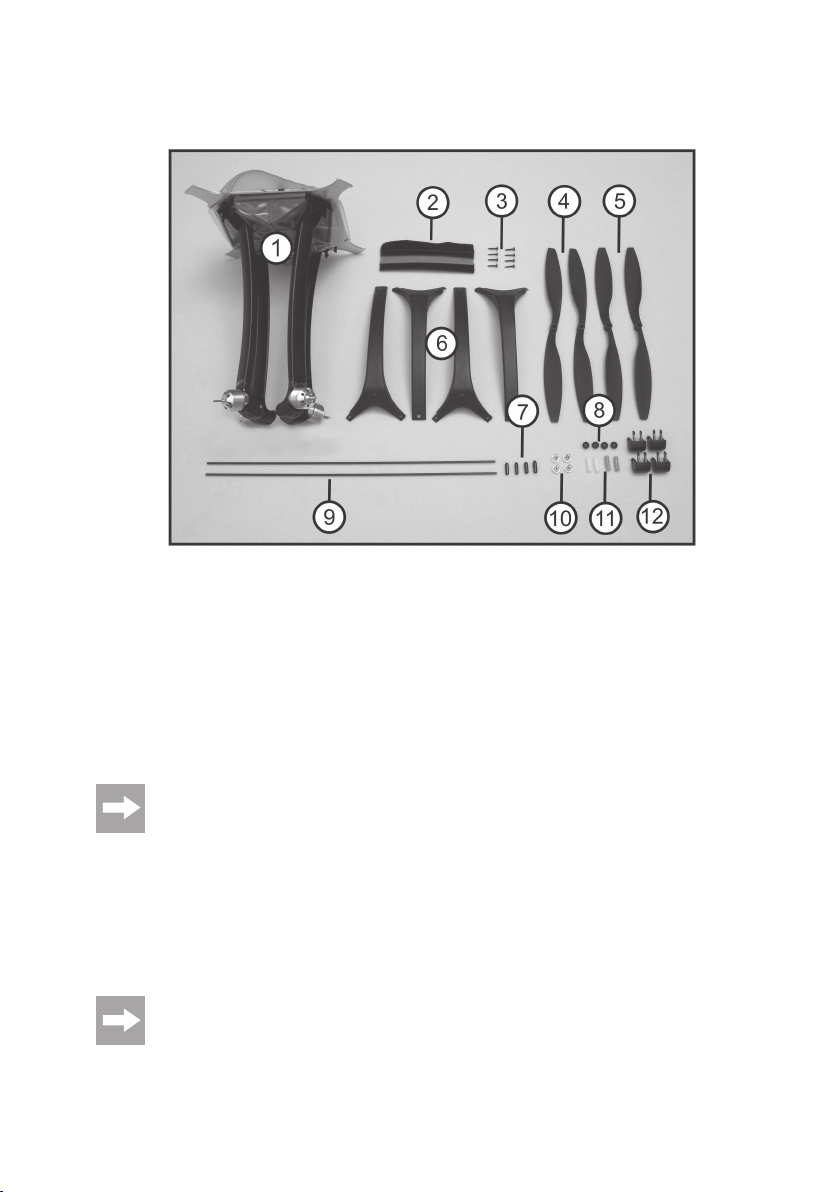
4. Lieferumfang
Bild 1
1) Vormontierter Quadroccopter
2) Klettbänder (4 Stück)
3) Schauben (8 Stück)
4) Rotoren 2x links
5) Rotoren 2x rechts
6) Landebeine (4 Stück)
7) Endkappen Landekufen (4 Stück)
8) Gummitüllen (4 Stück)
9) Landekufen (2 Stück)
10) Rotorspitzen (4 Stück)
11) Silikonschläuche (4 Stück)
12) Endkappen für Ausleger (4 Stück)
Ohne Abbildung: Bedienungsanleitung in deutsch (Handbuch),
Bedienungsanleitung in englisch, französisch und holländisch auf
CD, Antennenröhrchen, Jumper (2 Stück), Hochstromstecker für
Akkuanschluss, Klettbänder für Akkumontage (2 Stück), Federringe
(4 Stück) für Rotorspitzen, selbstklebende Gummidämpfer (4 Stück)
und Gummi für die Haubenbefestigung.
Eine Ersatzteilliste finden Sie auf unserer Internetseite www.conrad.com im Download-Bereich zum jeweiligen Produkt. Alternativ können Sie die Ersatzteilliste auch telefonisch anfordern. Die Kontaktdaten finden Sie am Anfang dieser Bedienungsanleitung im Kapitel “Einführung“.
Für den Aufbau und den Betrieb sind noch folgende Komponenten erforderlich, die nicht im Lieferumfang des Flugmodells beinhaltet sind:
Aufbau: Lötkolben und das dazu erforderliche Zubehör.
Betrieb: Zum Betrieb des Modells ist eine einfache 6-Kanal-Fernsteueranlage, ein 3-zelliger LiPo-Flugakku mit einer
Kapazität von mindestens 2500 mAh und einer Entladerate von 25 C sowie ein passendes LiPo-Ladegerät mit LiPoBalancer erforderlich.
Praxiserprobtes passendes Zubehör finden Sie in unseren Katalogen oder unter www.conrad.com.
6
5. Symbol-Erklärung
Das Symbol mit dem Ausrufezeichen weist Sie auf besondere Gefahren bei Handhabung, Betrieb oder
Bedienung hin.
Das „Pfeil“-Symbol steht für spezielle Tipps und Bedienhinweise.
6. Sicherheitshinweise
Bei Schäden, die durch Nichtbeachtung dieser Bedienungsanleitung verursacht werden, erlischt
die Gewährleistung/Garantie. Für Folgeschäden übernehmen wir keine Haftung!
Bei Sach- oder Personenschäden, die durch unsachgemäße Handhabung oder Nichtbeachten
der Sicherheitshinweise verursacht werden, übernehmen wir keine Haftung! In solchen Fällen
erlischt die Gewährleistung/Garantie.
Von der Gewährleistung und Garantie ausgeschlossen sind ferner normaler Verschleiß bei Betrieb und
Unfallschäden (z.B. gebrochene Rotoren oder Rahmen etc.).
Sehr geehrte Kundin, sehr geehrter Kunde, diese Sicherheitshinweise dienen nicht nur zum Schutz des
Produkts, sondern auch zu Ihrer eigenen Sicherheit und der anderer Personen. Lesen Sie sich deshalb
dieses Kapitel sehr aufmerksam durch, bevor Sie das Produkt in Betrieb nehmen!
a) Allgemein
Achtung, wichtiger Hinweis!
Beim Betrieb des Modells kann es zu Sach- und/oder Personenschäden kommen. Achten Sie deshalb
unbedingt darauf, dass Sie für den Betrieb des Modells ausreichend versichert sind, z.B. über eine Haftpflichtversicherung. Falls Sie bereits eine Haftpflichtversicherung besitzen, so informieren Sie sich vor
Inbetriebnahme des Modells bei Ihrer Versicherung, ob der Betrieb des Modells mitversichert ist.
Beachten Sie: In verschiedenen Ländern der EU besteht eine Versicherungspflicht für alle Flugmodelle!
• Aus Sicherheits- und Zulassungsgründen (CE) ist das eigenmächtige Umbauen und/oder das Verändern des Pro-
dukts oder deren Komponenten nicht gestattet.
• Das Produkt ist kein Spielzeug, es ist nicht für Kinder unter 14 Jahren geeignet.
• Das Produkt darf nicht feucht oder nass werden. Da im QuadroCopter empfindliche Steuerelektronik verwendet
wird, die auch auf Temperaturschwankungen reagiert und für einen bestimmten Temperaturbereich optimiert ist, ist
ein Betrieb unter 10°C zu vermeiden.
7

• Sollten Sie noch nicht über ausreichende Kenntnisse zum Fliegen von ferngesteuerten Hubschraubern verfügen,
so wenden Sie sich bitte an einen erfahrenen Modellsportler oder an einen Modellbau-Club. Alternativ sollten Sie an
einem geeigneten Flugsimulator die ersten Flugerfahrungen sammeln.
• Lassen Sie das Verpackungsmaterial nicht achtlos liegen, dieses könnte für Kinder zum gefährlichen Spielzeug
werden.
• Das Produkt wurde für einen Betrieb bei einer Umgebungstemperatur zwischen 10°C und 40°C und einer in Mittel-
europa normalen Luftfeuchtigkeit bei trockenem Wetter entwickelt. Bei einem Betrieb außerhalb dieser genannten
Bedingungen kann es zu veränderten (Material-) Eigenschaften und daraus resultierend auch zu Beschädigungen
des Produkts kommen!
• Ein max. Abfluggewicht von 2000g soll nicht überschritten werden. Bei einem höheren Abfluggewicht können die
Rotoren im Betrieb beschädigt werden und so einen Absturz verursachen!
• Sollten sich Fragen ergeben, die nicht mit Hilfe der Bedienungsanleitung abgeklärt werden können, so setzen Sie
sich bitte mit uns (Kontaktinformationen siehe Kapitel 1) oder einem anderen Fachmann in Verbindung.
b) Vor der Inbetriebnahme
• Beachten Sie die Bedienungsanleitung zu der von Ihnen verwendeten Fernsteueranlage.
• Überprüfen Sie regelmäßig die Funktionssicherheit Ihres Modells und der Fernsteueranlage. Achten Sie dabei auf
sichtbare Beschädigungen, wie z.B. defekte Steckverbindungen oder beschädigte Kabel.
• Sämtliche beweglichen Teile am Modell müssen leichtgängig funktionieren, dürfen jedoch kein Spiel in der Lage-
rung aufweisen.
• Überprüfen Sie vor jeder Inbetriebnahme den korrekten und festen Sitz der Rotoren.
• Der zum Betrieb erforderliche Flugakku sowie eventuell im Fernsteuersender eingesetzte Akkus sind entsprechend
den Herstellerangaben aufzuladen.
• Werden zur Stromversorgung des Senders Batterien genutzt, achten Sie auf eine noch ausreichende Restkapazität
(Batterieprüfer). Sollten die Batterien leer sein, so tauschen Sie immer den kompletten Satz und niemals nur einzelne Zellen aus.
• Schalten Sie immer zuerst den Sender ein. Achten Sie darauf, dass beim Einschalten des Senders der Gashebel
auf niedrigster Stellung (Motoren aus) eingestellt ist! Erst danach darf der Flugakku des Modells angeschlossen
werden. Andernfalls kann es zu unvorhersehbaren Reaktionen des Modells kommen und die Rotoren können ungewollt anlaufen!
• Achten Sie bei laufenden Rotoren darauf, dass sich weder Gegenstände noch Körperteile im Dreh- und Ansaug-
bereich der Rotoren befinden.
c) Während des Betriebs
• Gehen Sie bei Betrieb des Modells kein Risiko ein! Ihre eigene Sicherheit und die Ihres Umfeldes hängen alleine
von Ihrem verantwortungsbewussten Umgang mit dem Modell ab.
• Der unsachgemäße Betrieb kann schwerwiegende Personen- und Sachschäden verursachen! Achten Sie deshalb
beim Flugbetrieb auf einen ausreichenden Sicherheitsabstand zu Personen, Tieren und Gegenständen.
• Wählen Sie ein geeignetes Gelände zum Betrieb Ihres Modells aus.
• Fliegen Sie mit Ihrem Modell nur dann, wenn Ihre Reaktionsfähigkeit uneingeschränkt gegeben ist. Müdigkeit, Alko-
hol- oder Medikamenten-Einfluss können zu Fehlreaktionen führen.
8

• Fliegen Sie nie direkt auf Zuschauer oder auf sich selbst zu.
• Sowohl Motor, Flugregler als auch Flugakku können sich beim Betrieb des Modells erwärmen. Machen Sie aus
diesem Grund spätestens nach 20 Minuten Flugdauer eine Pause von 10 - 15 Minuten, bevor Sie den Flugakku
wieder laden bzw. mit einem eventuell vorhandenen Ersatzflugakku erneut starten. Die Antriebsmotoren müssen
auf Umgebungstemperatur abgekühlt sein.
• Lassen Sie immer die Fernsteuerung (Sender) eingeschaltet, solange das Modell in Betrieb ist. Schließen Sie nach
der Landung immer zuerst den Flugakku ab, bzw. schalten Sie das Modell aus. Erst danach darf der Fernsteuersender ausgeschaltet werden.
• Bei einem Defekt oder einer Fehlfunktion ist zuerst die Ursache der Störung zu beseitigen, bevor Sie Ihr Modell
wieder starten.
• Setzen Sie Ihr Modell und die Fernsteueranlage nicht über längere Zeit der direkten Sonneneinstrahlung oder
großer Hitze aus.
• Bei einem schweren Absturz (zum Beispiel aus großer Höhe) können die elektronischen Gyro-Sensoren beschädigt
bzw. verstimmt werden. Vor einem erneuten Flug ist daher unbedingt die volle Funktion zu prüfen! Wir empfehlen zu
dem einen Abgleich der Neutrallage.
• Bei einem Absturz ist das Gas sofort auf null zu reduzieren. Drehende Rotoren können bei Kontakt mit Hindernissen
bzw. beim Aufschlag beschädigt werden. Vor einem erneuten Flug sind diese unbedingt auf eventuelle Risse oder
Bruchstellen zu prüfen!
• Um Schäden am QuadroCopter durch Absturz wegen Unterspannung bzw. am Akku durch Tiefentladung zu ver-
meiden, empfehlen wir, im Flug die Leuchtsignale zur Unterspannung unbedingt zu beachten. Da die eingebauten
LEDs nur in eine Richtung abstrahlen, empfehlen wir den zusätzlichen Einbau des LiPo-Saver Best.Nr. 230327. Der
Lipo-Saver zeigt Ihnen per Lichtsignal eine drohende Unterspannung an. Platzieren Sie den LiPo-Saver an geeigneter Stelle im QuadroCopter.
Alternativ kann auch über das integrierte Combiboard die Unterspannungsanzeige an dort angeschlossene LEDs
zur Anzeige gebracht werden. Beachten Sie hierzu die Hinweise in dieser Bedienungsanleitung im Kapitel 14 „Funktionsweise Light & Sound“.
9
7. Batterie- und Akkuhinweise
Obwohl der Umgang mit Batterien und Akkus im täglichen Leben heute eine Selbstverständlichkeit ist,
bestehen zahlreiche Gefahren und Probleme. Speziell bei LiPo-/LiIon-Akkus mit ihrem hohen Energieinhalt (im Vergleich zu herkömmlichen NiCd- oder NiMH-Akkus) sind diverse Vorschriften unbedingt einzuhalten, da andernfalls Explosions- und Brandgefahr besteht.
Der QuadroCopter wird ohne Fernsteuerung, Akkus und Ladegerät geliefert. Trotzdem möchten wir Ihnen
aus Sicherheitsgründen zum Umgang mit Batterien und Akkus umfangreiche Informationen geben. Beachten Sie außerdem alle Unterlagen und Informationen, die bei den von Ihnen eingesetzten Zubehörteilen (z.B. Fernsteuerung, Akkus, Ladegerät) beiliegen!
a) Sender
• Batterien/Akkus gehören nicht in Kinderhände.
• Lassen Sie Batterien/Akkus nicht offen herumliegen, es besteht die Gefahr, dass diese von Kindern oder Haustieren
verschluckt werden. Suchen Sie in einem solchen Fall sofort einen Arzt auf!
• Batterien/Akkus dürfen niemals kurzgeschlossen, zerlegt oder ins Feuer geworfen werden. Es besteht Explosions-
gefahr!
• Ausgelaufene oder beschädigte Batterien/Akkus können bei Berührung mit der Haut Verätzungen verursachen,
benutzen Sie deshalb in diesem Fall geeignete Schutzhandschuhe.
• Herkömmliche Batterien dürfen nicht aufgeladen werden. Es besteht Brand- und Explosionsgefahr! Laden Sie aus-
schließlich dafür vorgesehene Akkus; verwenden Sie dazu geeignete Akkuladegeräte.
• Achten Sie beim Einlegen von Batterien/Akkus bzw. beim Anschluss eines Akkupacks auf die richtige Polung
(Plus/+ und Minus/- beachten).
• Bei längerem Nichtgebrauch (z.B. bei Lagerung) entnehmen Sie die in der Fernsteuerung eingelegten Batterien
(bzw. Akkus), um Schäden durch auslaufende Batterien/Akkus zu vermeiden.
• Laden Sie NiMH- bzw. NiCd-Akkus etwa alle 3 Monate nach, da es andernfalls durch die Selbstentladung zu einer
sog. Tiefentladung kommen kann, wodurch die Akkus unbrauchbar werden können.
• Wechseln Sie immer den ganzen Satz Batterien bzw. Akkus aus. Mischen Sie nicht volle mit halbvollen Batterien/
Akkus. Verwenden Sie immer Batterien bzw. Akkus des gleichen Typs und Herstellers.
• Mischen Sie niemals Batterien mit Akkus!
10

b) Flugakku
Achtung!
Nach dem Flug ist der LiPo-Flugakku von der Elektronik des QuadroCopters zu trennen.
Lassen Sie den LiPo-Flugakku nicht an der Elektronik angesteckt, wenn Sie diesen nicht benutzen (z.B.
bei Transport oder Lagerung). Andernfalls kann der LiPo-Flugakku tiefentladen werden. Dadurch wird er
zerstört und unbrauchbar! Zu dem besteht die Gefahr von Fehlfunktionen durch Störimpulse. Die Rotoren
könnten ungewollt anlaufen und Schäden oder Verletzungen verursachen.
• Laden Sie den LiPo-Flugakku niemals unmittelbar nach dem Gebrauch. Lassen Sie den LiPo-Flugakku immer erst
abkühlen (mindestebs 10-15 Minuten).
• Verwenden Sie zum Laden von LiPo-Akkus ein geeignetes LiPo-Ladegerät sowie einen LiPo-Equalizer/-Balancer.
• Laden Sie nur intakte und unbeschädigte Akkus. Sollte die äußere Isolierung des Akkus beschädigt sein bzw. der
Akku verformt bzw. aufgebläht sein, darf er auf keinen Fall aufgeladen werden. In diesem Fall besteht akute Brandund Explosionsgefahr!
• Beschädigen Sie niemals die Außenhülle des LiPo-Flugakkus. Zerschneiden Sie die Folienumhüllung nicht. Ste-
chen Sie nicht mit scharfen Gegenständen in den LiPo-Flugakku. Es besteht Brand- und Explosionsgefahr!
• Entnehmen Sie den LiPo-Flugakku zum Laden aus dem Modell und legen Sie ihn auf einen feuerfesten Untergrund.
Halten Sie Abstand zu brennbaren Gegenständen.
• Da sich sowohl das Ladegerät als auch der LiPo-Flugakku während des Ladevorgangs erwärmen, ist es erforder-
lich, auf eine ausreichende Belüftung zu achten. Decken Sie das Ladegerät und den LiPo-Flugakku niemals ab!
Dies gilt selbstverständlich auch für andere Ladegeräte und andere Akkus.
• Laden Sie LiPo-Akkus niemals unbeaufsichtigt.
• Trennen Sie den LiPo-Flugakku vom Ladegerät, wenn dieser vollständig aufgeladen ist.
• Ladegeräte dürfen nur in trockenen, geschlossenen Innenräumen betrieben werden. Ladegeräte und LiPo-Flug-
akku dürfen nicht feucht oder nass werden.
Es besteht Lebensgefahr durch einen elektrischen Schlag. Außerdem besteht Brand- und Explosionsgefahr durch den Akku. Gerade LiPo-Akkus sind durch die darin enthaltenen Chemikalien sehr feuchtigkeitsempfindlich! Setzen Sie das Ladegerät und den LiPo-Flugakku keinen hohen/niedrigen Temperaturen
sowie direkter Sonneneinstrahlung aus. Beachten Sie beim Umgang mit LiPo-Akkus die speziellen
Sicherheitshinweise des Akkuherstellers!
11
8. Endmontage des QuadroCopters
a) Montage der Landebeine
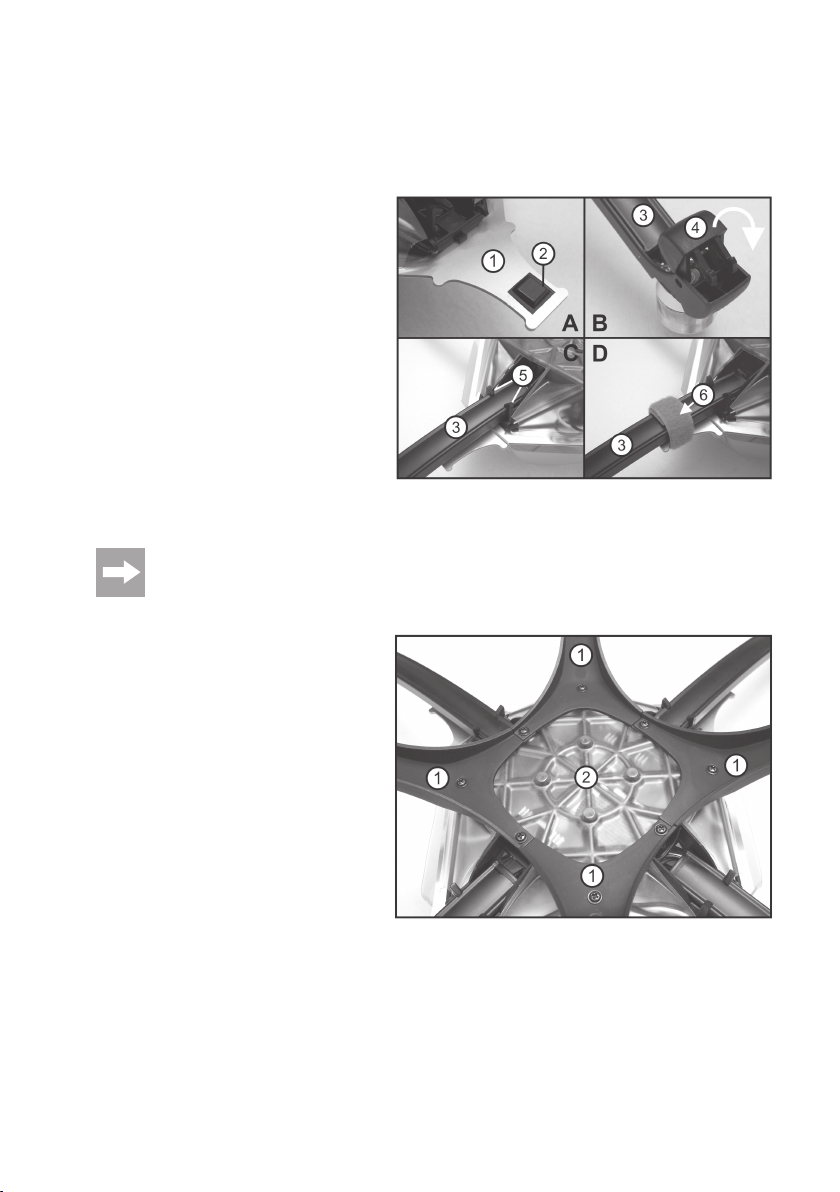
Bringen Sie je einen selbstklebenden Gummidämpfer (2) an den vier Enden der Verstärkungsplatte vom Chassis (1) an, wie in Bild 2a, Position
„A“ gezeigt. Diese Gummidämpfer dienen als Anschlagsdämpfer der Ausleger (3).
Montieren Sie an den vier Auslegern (3) die Endstücke (4) wie in Bild 2a, Position „B“ gezeigt und
lassen die Endstücke einrasten.
Klappen Sie die vier Ausleger (3) komplett aus und
lassen diese in den Verriegelungen (5) einrasten,
siehe Bild 2a, Position „C“.
Wickeln Sie die Klettbänder (6) fest um die Ausleger, siehe Bild 2a, Position „D“. Das rote Klettband
muss auf den Ausleger montiert werden, der einen
„Richtungspfeil“ aufgeklebt hat und signalisiert somit zusätzlich „vorne“ am QuadroCopter.
Durch die Montage der Gummidämpfer (Bild 2a, Position „A“) und den Klettbändern (Bild 2a, Position „D“)
wird die Verbindung der Ausleger mit der Rumpfzelle zusätzlich stabilisiert. Gleichzeitig ist diese Art der
Befestigung ausreichend elastisch, um härtere Landungen zu dämpfen. Durch die aufgezeigte Maßnahme verbessern sich zudem auch die Flugeigenschaften.
Legen Sie den QuadroCopter mit der Oberseite auf
eine geeignete Unterlage. Montieren Sie die vier
Landebeine (1) an die Unterseite des Chassis (2)
wie in Bild 2b gezeigt. Verwenden Sie hierzu die
acht Schrauben aus dem Lieferumfang.
Die Löcher in der Plastikhaube vom Chassis müssen vor der Montage mit einem kleinen Bohrer vorsichtig gebohrt werden.
Beachten Sie bei der Montage, dass die Landebeine an den Außenseiten eine „Oberseite“ und
gegenüber eine „Unterseite“ an der Stelle haben,
wo das Loch für die Befestigungsschraube vorgesehen ist.
Bild 2a
12
Bild 2b
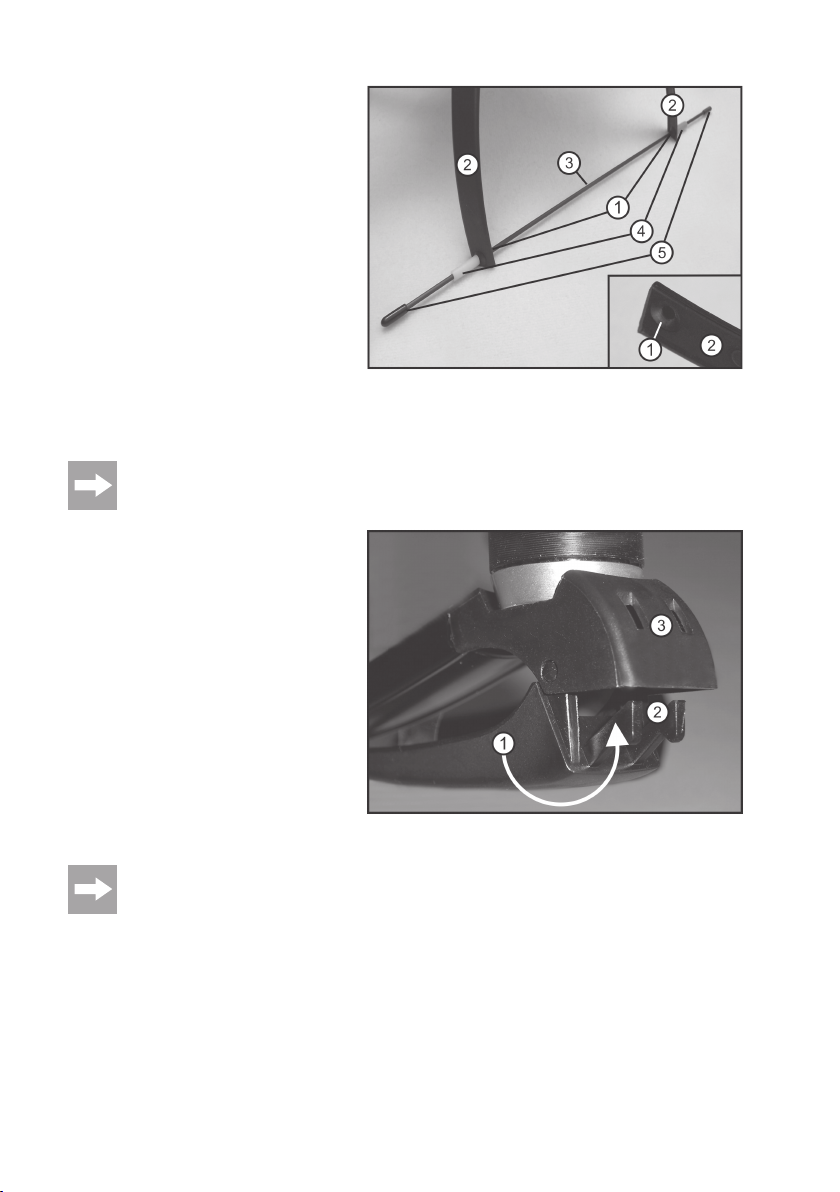
Montieren Sie die vier Gummitüllen (1) in den Löchern der Landebeine (2). Schieben Sie dann die
Landekufen (3) mittig in die Gummitüllen (1).
Schieben Sie nun von außen die kurzen Silikonschläuche (4) bis zu den Gummitüllen (1) auf die
Landekufen (3). Durch die Silikonschläuche wird
verhindert, dass sich die Landekufen verschieben.
An den Enden der Landekufen (3) schieben Sie je
eine Endkappe (5) auf.
Für den normalen Flugbetrieb reicht die aufgezeigte
Art der Kufenmontage vollkommen aus. Für den
harten Flugbetrieb empfehlen wir, die Kufen und
Gummitüllen durch ein paar Tropfen Sekundenkleber zu sichern.
Optionale Verwendung der Landebeine des „QuadroCopter 450“:
Anstelle des am „QuadroCopter 650“ eingesetzten Landegestells können auch die Landebeine des
„QuadroCopter 450“ verwendet werden. Diese sind nicht im Lieferumfang des „QuadroCopter 650“, sondern können als Ersatzteil bestellt werden (siehe Ersatzteilliste des „QuadroCopter 450“).
Im Bild 2d können Sie die Landebeine des „QuadroCopter 450“ sehen.
Klappen Sie die Landebeine (1) in die Flugposition.
Es muss ein deutliches Einrasten der Halteklammern (2) in den Schlitzen (3) spürbar sein.
Für ein Einklappen sollten Sie mit einem kleinen
Schraubenzieher die Halteklammern (2) in den
Schlitzen (3) etwas eindrücken, um ein Brechen
der Plastikteile zu vermeiden.
An einem Landebein ist ein roter Richtungsanzeiger montiert. Dieser Richtungsanzeiger ist in Flugrichtung immer als „vorne“ zu betrachten.
Bild 2c
Bild 2d
Bei etwas härteren Landungen klappen die Landebeine ein. Das ist normal und so gewünscht. Wollen Sie
diesen Effekt vermeiden bzw. wollen Sie die Landebeine für einen Transport nicht mehr einklappen, so
können Sie mit einem Tropfen Sekundenkleber die Beine auch dauerhaft fixieren.
13
b) Montage der Rotoren
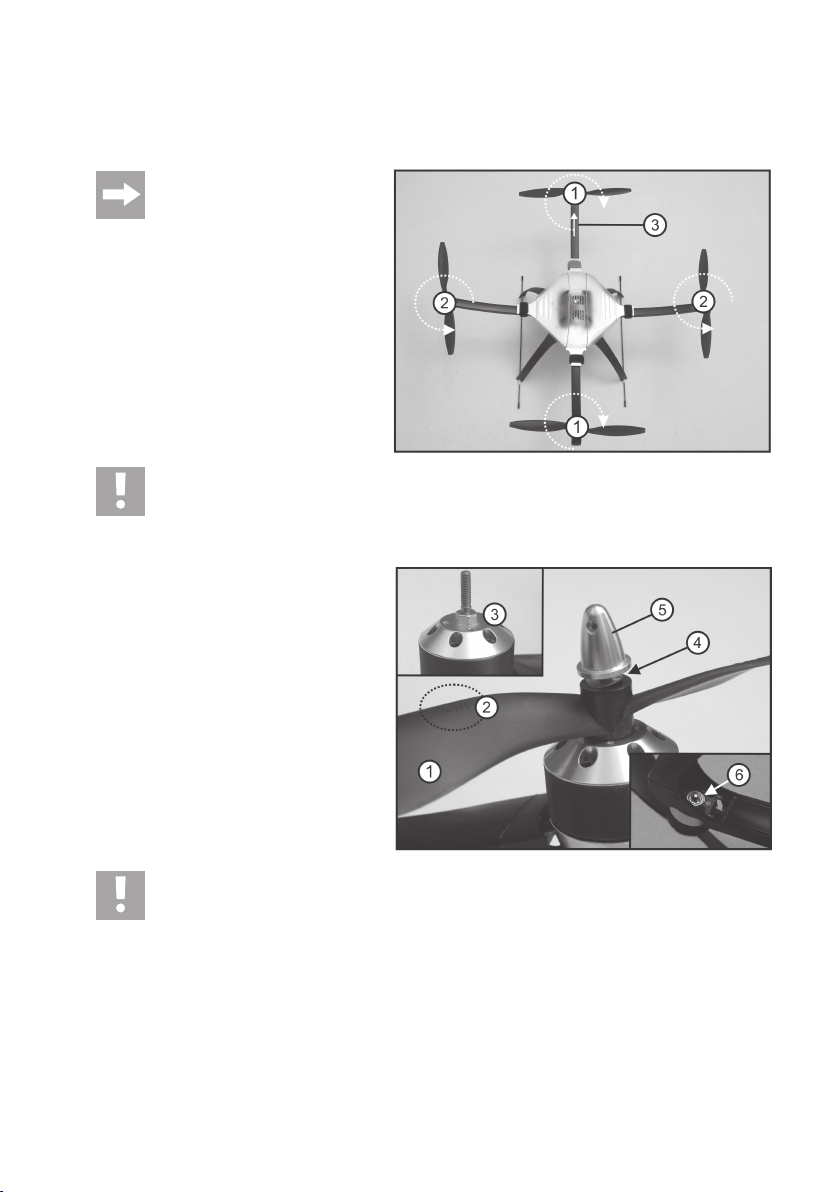
Die Drehrichtung der Rotoren kann aus nebenstehendem Bild (Ansicht von oben) entnommen werden. Dabei ist der
Pfeil auf dem Ausleger als Anhaltspunkt für die Ausrichtung des Modells zu verwenden und gilt als „vorne“.
Achtung!
Da die Motoren bereits vormontiert
sind, gilt es an Hand der Flugrichtung
die Drehrichtung der Rotoren genau zu
beachten (Bild 3)!
Die Rotoren in der Längsachse (1) drehen sich im
Uhrzeigersinn (rechtslaufend) und müssen mit der
Aufschrift „RIGHT“ beschriftet sein.
Die Rotoren in der Querachse (2) drehen sich gegen den Uhrzeigersinn (linkslaufend) und müssen
mit „LEFT“ beschriftet sein.
Der Pfeil am Ausleger (3) zeigt „vorne“ an.
Achtung!
Wenn die Rotoren nicht wie aufgezeigt montiert werden, passen die programmierten Drehrichtungen nicht
mehr zu den Drehrichtungen der Rotoren. Der QuadroCopter ist somit nicht mehr flugfähig und nicht mehr
steuerbar! Verlust von Gewährleistung/Garantie!
Rotoren und Motorwellen sind mit einem Sechskant versehen (3).
Setzen Sie die Rotoren (1) auf den Motorwellen
(3) in der Art auf, dass sie in dem Sechskant einrasten. Achten Sie auf die Beschriftung „RIGHT“ und
„LEFT“ auf den Rotoren (2).
Legen Sie nun die jeweils eine der mitgelieferten
Federscheiben (4) zwischen Rotor und Rotorspitze
(5) ein, da sich ansonsten die Rotoren im Flug lösen können.
Schrauben Sie mit einem kleinen Stift oder Schraubendreher die Rotorspitzen an den Motorwellen
fest.
Achtung!
Ein zu festes Anschrauben führt zu Beschädigungen der Motoren. Die Wellen können dabei reißen oder
aus den Lagern gezogen werden. Die Motoren laufen schwergängiger und das kann sich negativ auf die
Flugeigenschaften auswirken. Prüfen Sie deshalb nach dem Anschrauben der Rotoren, dass sich alle
Rotoren leicht drehen lassen. Der in Bild 4 Pos. 6 dargestellte Sprengring auf der Unterseite der Motoren
muss sich bewegen lassen und darf nicht klemmen.
Vergewissern Sie sich vor jedem Flug, dass die Rotoren fest auf den Motoren verschraubt sind. Bei Einsatz von Werkzeugen ist äußerste Vorsicht geboten.
Bild 3
Bild 4
14
c) Anschluss des Empfängers
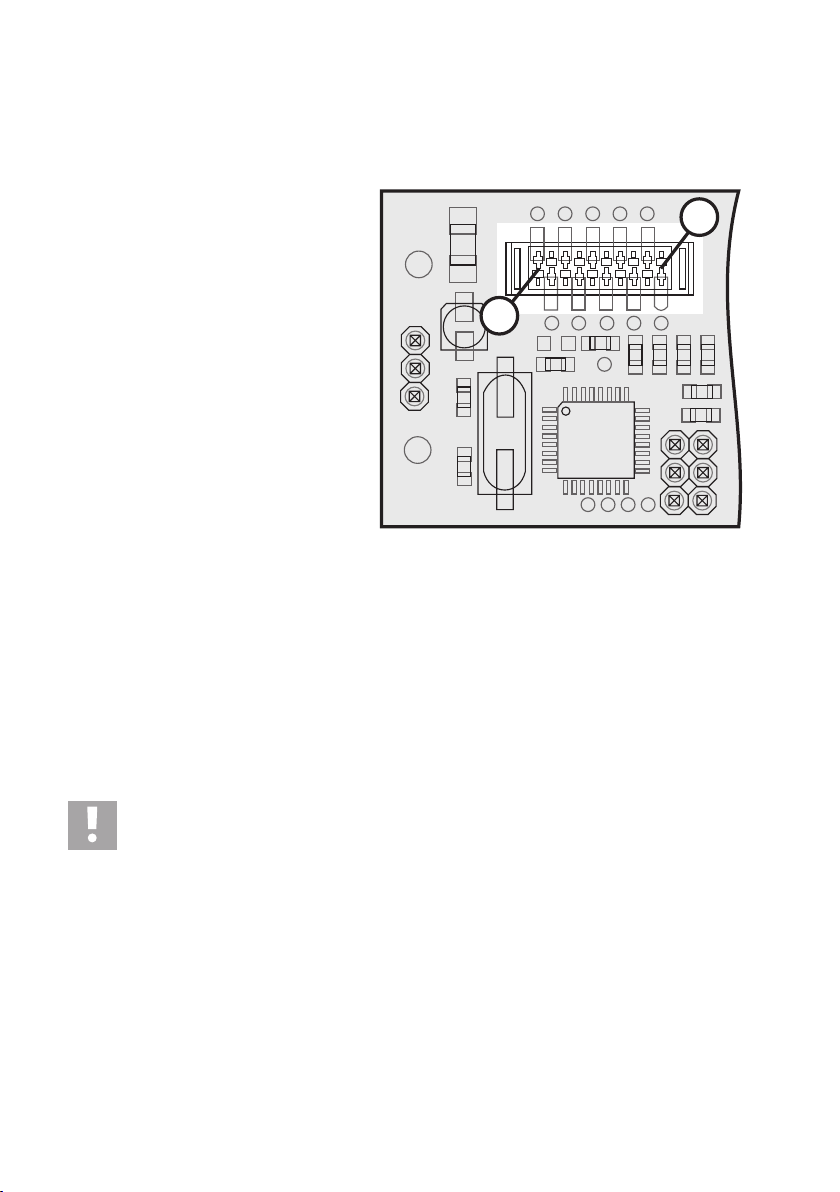
Der Empfänger wird an der Anschluss-Buchse „X13“ des Combiboards (1) angeschlossen. Dafür liegt dem
QuadroCopter ein geeignetes Anschlusskabel (2) bei. Die Anschlussbuchse „X13“ verfügt über 10 Kontakte, die von
rechts nach links durchnummeriert sind. Links befindet sich der Kontakt 10 und rechts der Kontakt 1.
Die Kontakte sind folgendermaßen belegt:
R41
X15
R43
1
LD2
Bild 5
Kontakt 10 = Kanal 1
Kontakt 9 = Kanal 2
Kontakt 8 = Kanal 3
Kontakt 7 = Kanal 4
Kontakt 6 = Kanal 5
Kontakt 5 = Kanal 6
Kontakt 4 = Kanal 7
Kontakt 3 = Kanal 8
Kontakt 2 = 5 V/DC/Plus (+)
+
PAD1
X14
-
PAD2
C18
C19
Q2
D1
10
X13
C4
R40
C17
LD1
R42
IC3
Kontakt 1 = GND/Minus (-)
Die Signale der 8 Eingänge (Kanal 1 – 8) werden vom Summensignalwandler gemessen und verarbeitet. Dabei wird
aus allen verfügbaren Signalen ein Summensignal gemäß der Spezifikation für RC-Fernsteueranlagen (Pulsbreite
zwischen 1 und 2 ms) gebildet. Aufgrund der Messung der Signale und der Signalverarbeitung kommt es dabei zu
einer Zeitverzögerung von einer Framelänge. Dies wirkt sich allerdings im Betrieb nicht aus und ist deshalb lediglich
der Vollständigkeit halber erwähnt.
Die gemessenen Servosignale können in beliebiger Reihenfolge, parallel, hintereinander oder überlappend auftreten.
Dabei gibt es keinerlei Einschränkung und somit ist der Summensignalwandler für alle gängigen Systeme einsetzbar.
Ebenso ist keine Sync-Pause zwischen den einzelnen Signalen erforderlich.
Für die Stromversorgung des Empfängers ist es ausreichend die Kontakte 1 (Minus/-) und 2 (Plus/+) nur an einem
Servo-Anschlusskabel zu verbinden.
Wichtig!
Achten Sie darauf, die Eingänge des Summensignalwandlers ohne Lücken zu belegen! Bei einer 6 Kanal
Anlage also von 1 - 6 und nicht beispielsweise 1 - 4 und dann 6 und 7. Bei einer derartigen Belegung
würde die Elektronik die Kanäle 6 und 7 nicht erkennen!
Bei der Vielzahl der am Markt befindlichen Größen und Bauformen der Fernsteuerempfänger können wir
keine konkreten Einbauhinweise für den Empfänger geben. Je nach verwendetem Empfänger können
Sie diesen entweder zwischen den Platinen im Gitterrahmen oder auf der Verstärkungsplatte montieren.
Falls für den Einbau des Empfängers die Platinen im Gitterrahmen versetzt werden müssen, so empfehlen wir für optimale Flugeigenschaften, dass die Hauptplatine mit den Gyros (diese befinden sich auf der
kleinen abstehenden Platine) genau mittig montiert wird.
R21
R22
X6
R21
X6
15
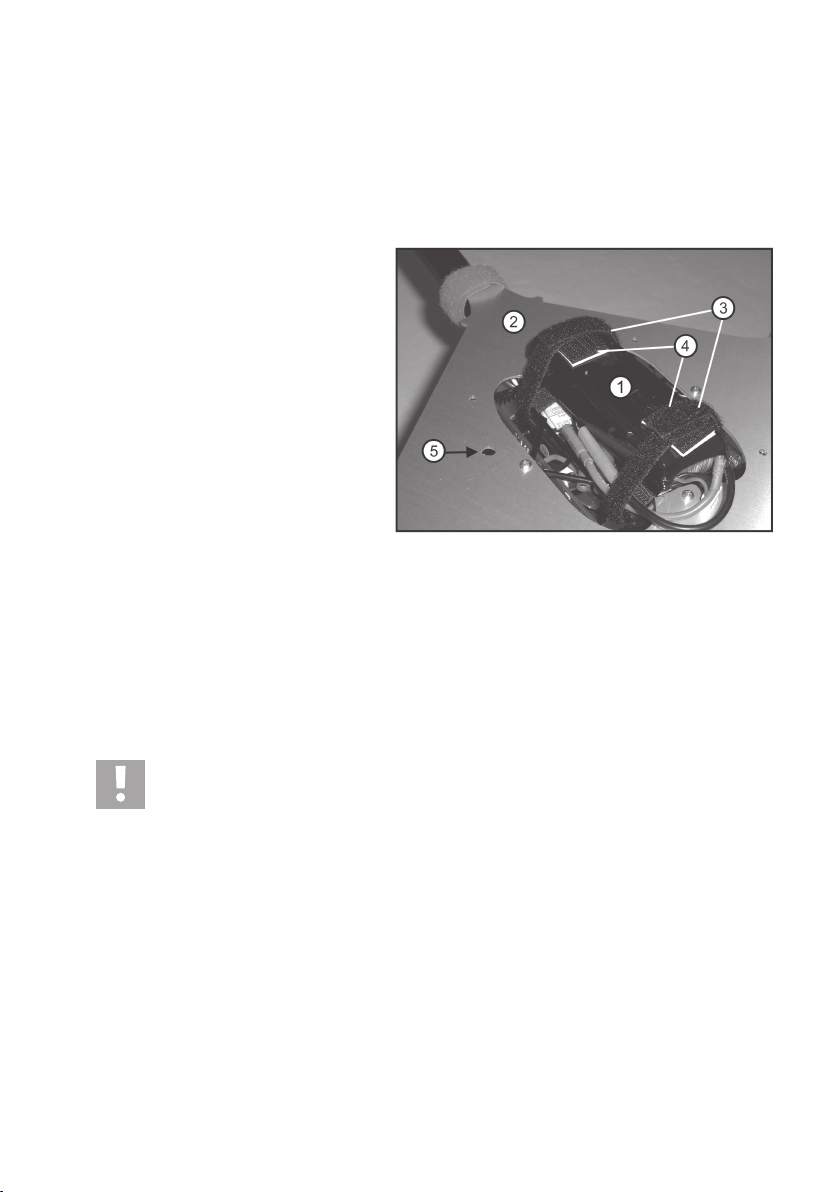
d) Montage des Flugakkus
Der Flugakku gehört nicht zum Lieferumfang. Um den Flugakku zu montieren, gehen Sie folgendermaßen vor:
Löten Sie an die Anschlusskabel vom Akku das mitgelieferte, hochstromfähige Steckersystem an. Achten Sie dabei
unbedingt auf die richtige Polarität.
Das rote Kabel der Elektronik des QuadroCopters muss durch die Steckverbinder mit dem Pluskabel des Akkus
verbunden werden, das schwarze Kabel mit dem Minuskabel des Akkus.
Montieren Sie den Akku (1) auf dem Rahmen (2)
und befestigen Sie ihn mit den Klettbändern (3).
Kleben Sie zusätzlich zum gezeigten Klettband auf
die Oberseite des Akkus jeweils einen Streifen
Klettband (4 – aus dem Lieferumfang, um auch das
Verrutschen nach vorne oder hinten wirksam zu
verhindern. Die Anschlusskabel können wie im Bild
gezeigt auch unter den Klettbändern (3) befestigt
werden
Der Akku muss mittig aufgesetzt werden, so
dass der QuadroCopter nicht heck-, kopf- oder
seitenlastig ist.
In der Verstärkungsplatte vom Chassis (2) ist eine
Bohrung für ein Antennenröhrchen (5) vorgesehen.
In dem Antennenröhrchen können Sie eine
Empfängerantenne nach außen führen. In der oberen Abdeckhaube ist an gleicher Stelle ebenfalls
ein Loch.
Die Elektronik des QuadroCopters besitzt eine Sicherheitseinrichtung gegen versehentliches Anlaufen des Motors.
Wenn der Kontakt zum Akku hergestellt wird, obwohl der Sender nicht eingeschaltet ist oder der Steuerknüppel für
Drehzahl/Pitch nicht auf Null gezogen wurde, gibt die Steuerelektronik im Modell keinen Anlaufbefehl an die Motoren.
Erst wenn der Sender eingeschaltet wird und der Steuerknüppel für Drehzahl/Pitch einmal auf Null gezogen wird, gibt
die Steuerelektronik den normalen Betriebszustand frei.
Achtung:
Um beim Ausfall der Sicherheitseinrichtung ein versehentliches Anlaufen des Motors zu verhindern, soll
der Sender eingeschaltet sein. Der Steuerknüppel für Drehzahl/Pitch muss auf Null gezogen sein, so dass
kein Befehl zum Gasgeben ausgesendet wird.
Bild 6
16

e) Montage der oberen Abdeckhaube
Durch die Lage des Antennenröhrchens und dem
in der oberen Haube vorgebohrten Loch kann die
Haube nur in einer Position montiert werden.
Befestigen Sie die obere Abdeckhaube (1) mit einem Gummiband (2) wie in Bild 7 gezeigt.
Die Gummibänder sind hierzu vorne und hinten
unter den Auslegern der Verstärkungsplatte zu
schieben.
Die Haube muss so aufgesetzt werden, dass das
Loch für das Antennenröhrchen (3) oberhalb von
dem Loch in der Verstärkungsplatte liegt (siehe
auch vorheriges Kapitel).
Bild 7
17

9. Überprüfung der Konfiguration
a) Allgemein
Führen Sie die Konfiguration des QuadroCopters wie in diesem Kapitel beschrieben durch. Unbedingt erforderlich ist
das Einlernen der Kanäle, da anderenfalls der QuadroCopter Ihre Sendeanlage nicht erkennt. Sobald Sie dies durchgeführt haben, ist der QuadroCopter flugbereit.
Bei Verwendung einer Computerfernsteueranlage ist diese unbedingt ohne Mischer im Standardprogramm anzulernen!
Um eine korrekte Zuordnung der Steuerknüppel zu den gewünschten Steuerbefehlen durchzuführen, ist es notwendig, den QuadroCopter auf den verwendeten Sender anzulernen. Dabei speichert die Elektronik vom QuadroCopter
ab, welcher Kanal welches Steuerkommando überträgt. Grundsätzlich können Sie die Belegung der Steuerhebel frei
wählen (je nach Ihren Gewohnheiten), für Anfänger wird aber empfohlen, die vorgeschlagenen Beispiele zu befolgen.
Ab Werk ist der QuadroCopter auf „Mode 2“ konfiguriert. Bei den Beispielen handelt es sich um eine gängige Belegung aus der Praxis vieler Modellpiloten.
Überlegen Sie sich, welche Belegung Sie programmieren wollen und führen Sie dann das Erlernen der Kanäle dementsprechend durch. Weitere Möglichkeiten zum Steuermodus 1, 3 oder 4 (Mode 1, 3 oder 4) finden Sie in der Anleitung in diesem Kapitel unter Punkt „Mögliche Steuermodi“.
Zur Kontrolle der Konfiguration, der Anzeige von Funktionsstörungen oder dem Betriebszustand sind eine rote und
eine grüne LED auf dem Controlboard installiert. Die jeweiligen Anzeigen entnehmen Sie bitte der Tabelle im nachfolgenden Kapitel „Sicherheitseinrichtungen“ in dieser Anleitung.
Bei Verwendung von Multiplex-Fernsteuerungen müssen die Servoprotokolle für alle vier Funktionen (Gas,
Rollen, Nicken und Gieren) von „MPX“ auf „UNI“ umgestellt werden.
Sollte sich der QuadroCopter nicht auf Ihre Fernsteuerung anlernen lassen, kann es gegebenenfalls an
der Reverse-Funktion Ihrer Fernsteuerung liegen. Wir empfehlen Ihnen, hier für die Gas-Funktion den
Reverse-Schalter zu betätigen und den Anlern-Vorgang erneut zu starten.
18

b) Erkennen der Kanäle vom Sender (allgemein)
Bevor Sie mit dem Einlernen beginnen, stecken Sie
einen eventuell angeschlossenen Akku vom
QuadroCopter ab. Entfernen Sie auch ein eventuell angeschlossenes Verbindungskabel zum PC
vom QuadroCopter.
Setzen Sie eine Steckbrücke (engl. „Jumper“) für
die RC-Konfigurationseinstellung „R2“ für „Remote
Setting“ (5). Sie finden die Stiftleisten für die Steckbrücken/Jumper im rechten oberen Bereich auf der
Rückseite des Controlboards des QuadroCopters.
Auf der einen Seite der Platine (1) sind die beiden
LEDs (2) zur Anzeige bestimmter Betriebszustände
vorhanden. Gegenüber auf der anderen Seite der
Platine (3) sind die Stiftleisten „S1, S2, R1, R2“ (4)
für die Steckbrücken/Jumper zu sehen.
Um den QuadroCopter im „Remote Setting“-Modus zu betreiben, setzten Sie die Steckbrücke „R2“ (5) wie in Bild 8
gezeigt. Diese Einstellung ist unabhängig von anderen gesetzten Steckbrücken/Jumpern.
Wichtig!
Stellen Sie vor dem Einschalten des Senders den Gasknüppel auf „Motoren aus“ und alle Trimmhebel/
Trimm-Schieberegler der Steuerknüppel in die Mittelstellung. Andernfalls könnte es sein, dass der
QuadroCopter nach dem Anschluss des Flugakkus den Sender nicht erkennt.
Schalten Sie jetzt Ihren Sender ein, ziehen Sie bei 27-/40MHz-Fernsteueranlagen die Teleskopantenne des Senders
komplett heraus. Achten Sie darauf, dass sich alle Hebel und Trimmungen des Senders in der Neutralstellung befinden. Die dargestellten Beispiele zeigen den Vorgang an Hand einer Fernsteuerung im Mode 2. Falls Sie einen anderen Mode bevorzugen, können die verwendeten Achsen abweichen (siehe im Kapitel „Mögliche Steuermodi“)!
Stellen Sie auch sicher, dass sich an der Fernsteuerung die Schieberegler für die Trimmung in der Neutralstellung
befinden! Ansonsten ist ein korrektes Erkennen der Kanäle nicht möglich!
Achten Sie ebenfalls auf die korrekte Richtung der
Hebelbewegungen, da anderenfalls die Signale
invertiert abgespeichert werden! Computerfernsteueranlagen immer ohne Mischer betreiben!
Bewegen Sie den Gashebel (siehe Bild 9) nach
hinten auf die Nullstellung (Motor aus), alle anderen Steuerelemente auf Neutral.
Wollen Sie „Pitch Reverse“ fliegen (bei „Motor aus“
zeigt der Steuerknüppel für Gas vom Körper weg),
dann bringen Sie den Gas-Hebel in die max. Position nach vorne, bevor Sie den Akku anschliessen.
Bild 8
Bild 9
19

c) „Gas“ erlernen
Schließen Sie den aufgeladenen Akku an den QuadroCopter an. Dieser beginnt mit einem Selbsttest und direkt
anschließend mit dem Einlernen der Kanäle. Anhand der Gasstellung erkennt der QuadroCopter automatisch, welchen Kanal Sie für das Gas verwenden wollen.
Als Bestätigung pulsiert die rote LED des QuadroCopters im 2er Rhythmus (2x kurzes Blinken, danach längere Pause, danach wieder 2x kurzes Blinken usw.)
d) „Gier“ erlernen
Bewegen Sie nun den GIER-Hebel (siehe Bild 10)
nach links unten auf Vollausschlag und halten ihn
dort für mind. eine Sekunde.
Der QuadroCopter erkennt dadurch den GIER-Kanal und speichert diesen ab.
Bewegen Sie GIER wieder auf die Neutralstellung
zurück, GAS weiterhin auf null.
Als Bestätigung pulsiert die rote LED des QuadroCopters im 3er Rhythmus (3x kurzes Blinken, danach Pause usw.)
Die grüne LED zeigt im jeweiligen
Konfigurationsschritt die Kanalnummer
an, solange der Hebel betätigt bleibt!
Wichtig für die Fortschrittsanzeige ist
jedoch nur die rote LED!
Achten Sie bei der Anlernprozedur unbedingt darauf, nur die geforderten Hebel zu bewegen, ansonsten wird die
Einstellung nicht erkannt!
Bild 10
e) „Nick“ erlernen
Bewegen Sie den NICK-Hebel (siehe Bild 11) auf
Vollausschlag für NICK GEBEN ganz nach oben
und halten Sie ihn dort für mind. eine Sekunde.
Der QuadroCopter erkennt dadurch den NICK-Kanal und speichert diesen ab. Bewegen Sie NICK
wieder auf die Neutralstellung zurück, lassen Sie
GAS weiterhin auf null.
Als Bestätigung pulsiert die rote LED
des QuadroCopters im 4er Rhythmus
(4x kurzes Blinken, danach Pause
usw.)
20
Bild 11

f) „Roll“ erlernen
Bewegen Sie den ROLL-Hebel (siehe Bild 12) auf
Vollausschlag für ROLL LINKS nach ganz links und
halten Sie ihn dort für mind. eine Sekunde.
Der QuadroCopter erkennt dadurch den ROLLKanal und speichert diesen ab. Bewegen Sie ROLL
wieder auf die Neutralstellung zurück, lassen Sie
GAS weiterhin auf null.
Als Bestätigung erlischt die rote LED des QuadroCopters und die grüne LED leuchtet dauerhaft. Der
Einlernvorgang ist damit erfolgreich abgeschlossen.
Stecken Sie den Akku vom QuadroCopter ab und
entfernen Sie die Steckbrücke/Jumper „R2“.
Andere eventuell gesteckte Jumper können Sie
belassen. Das Einlernen der Kanäle ist nun abgeschlossen.
Bild 12
21

g) Einstellung des Flugmodus
Der QuadroCopter bietet drei unterschiedliche Flugmodi:
• Beginner (geeignet für Anfänger)
• Sport (geeignet für geübte QuadroCopter Piloten; geringere Achsbegrenzung und höhere Dynamik)
• User (Flugparameter einstellbar mit einer PC-Software, siehe Kapitel „Konfiguration mit PC-Software“)
Der Flugmodus wird vor dem Einschalten durch Setzen der Steckbrücken/Jumper „S1“ und „S2“ festgelegt und kann
während des Betriebs nicht verändert werden. Die Positionen für die Steckbrücken befinden sich auf dem Controlboard (siehe auch Bild 8 im Kapitel „Erkennen der Kanäle vom Sender“).
Tipp aus der Praxis:
Speziell Anfängern ist es dringend angeraten, die Direktheit der Steuerbefehle zu reduzieren, mit der der
QuadroCopter Steuerbefehle der Fernsteuerung um die Mittellage herum umsetzt (negatives Exponential
„Expo“).
Zur Verdeutlichung:
Normalerweise reagiert der QuadroCopter linear. Das bedeutet, dass sich der Steuerknüppelausschlag und die Reaktion synchron zueinander verhalten. Mit negativem Expo wird erreicht, dass der QuadroCopter am Anfang der
Steuerbewegung relativ träge, dafür aber bei stärkeren Steuerausschlägen umso heftiger auf den Steuerbefehl reagiert. Dieses Verhalten kommt besonders dem Einsteiger zugute, der anfänglich dazu neigt, zu übersteuern, also die
Knüppel der Fernsteuerung heftiger als notwendig zu bewegen. Dieser Effekt ist aber natürlich nur bei den drei
Steuerachsen (Rollen, Nicken und Gieren) erwünscht, nicht jedoch beim Gas. Daher: Kein Expo auf Gas einstellen!
Mit anderen Worten: Mit negativem Expo erreicht man ein trägeres Verhalten des Fluggerätes auf Steuerbewegungen
im Bereich der Mittellage der Steuerknüppel. Dies geschieht entweder über die optional erhältliche Software, über die
Steckbrücken/Jumper des QuadroCopter (siehe „Beginner-Modus“) oder über eine vorhandene „Expo“-Funktion der
Fernsteuerung. Die Möglichkeit zur Einstellung von „Expo“ haben nur Computerfernsteueranlagen. Jedoch ist Vorsicht geboten, denn je höher das negative Expo gewählt wird, desto aggressiver reagiert der QuadroCopter bei Knüppelbewegungen im Bereich des Endausschlags.
Nachstehende Tabelle erläutert die verschiedenen Einstellungen der Steckbrücken/Jumper. Ab Werk ist keine Steckbrücke/Jumper gesetzt und der QuadroCopter befindet sich im Beginner-Modus. Die Steckbrücken/Jumper „S1“ und
„S2“ sind unabhängig von den restlichen Steckbrücken/Jumpern!
Beginner Sport User
22
Für den Flugmodus „User“ müssen Sie mit der optional erhältlichen Konfigurationssoftware Ihr eigenes
„Setting“ programmieren. Hierzu können Sie als Vorlage entweder den Beginner- oder den Sport-Modus
verwenden und Ihren individuellen Wünschen anpassen. Beachten Sie hierzu die Hinweise in der Bedienungsanleitung des Konfigurations-Sets.

h) Konfiguration mit PC-Software
Um den QuadroCopter komplett mit eigenen Parametern zu fliegen, ist es möglich, die Elektronik des QuadroCopters
über ein Schnittstellenkabel (Seriell-TTL auf USB) an einen PC anzuschließen.
Optional ist hierfür ein PC-Konfigurations-Kit erhältlich. Dieses enthält ein Verbindungskabel, eine detailierte Beschreibung sowie die Software auf CD. Dieses Kit ist verwendbar für Microsoft® Windows XP®*, Windows Vista®*
und Windows 7®* (* Microsoft, Windows XP, Windows Vista und Windows 7 sind eingetragene Markenzeichen der
Microsoft Cooperation in den USA und anderen Ländern).
Da es für einen normalen Flugbetrieb nicht notwendig ist, eine Konfiguration mittels PC durchzuführen, ist dies hier
auch nur am Rande erwähnt. Nähere Informationen zur Konfiguration finden Sie in der Bedienungsanleitung der
Software.
Wenn die Steckbrücke/Jumper „R1“ gesetzt ist, befindet sich der QuadroCopter im PC-Konfigurationsmodus (PCMode) und kann nicht geflogen werden. Entfernen Sie diese Steckbrücke/Jumper für den normalen Flugbetrieb!
Auf der Steuerplatine unterhalb der LED‘s ist ein Micro-Taster montiert, der zum Reset der Steuerelektronik verwendet werden kann. Dazu drücken Sie den Micro-Taster bei angeschlossenem Akku für ca. 1
Sekunde. Danach startet die Elektronik neu und geht in den je nach Steckbrücke/Jumper gesetzten Zustand. Der Effekt ist der Gleiche wie „Flugakku abstecken“.
Den Micro-Taster (1) und die Schnittstelle (2) finden Sie auf dem Controlboard (3). Aus fototechnischen Gründen sehen Sie in Bild 13 die ausgebaute Platine des Controlboards.
Bild 13
23

i) Mögliche Fernsteuermodi
Mode Gas Gier Nick Roll
1
2
3
4
24

10. Vor jeder Inbetriebnahme
a) Überprüfen der Verschraubungen
Überprüfen Sie nach dem Transport und vor dem Fliegen unbedingt alle Verschraubungen auf festen Sitz. Durch die
Erschütterungen beim Transport und beim Fliegen können sich Verschraubungen lockern. Daher müssen Sie, wie bei
einem echten Hubschrauber, einen gründlichen Pre-flight-check durchführen.
b) Überprüfen der beweglichen Teile
Überprüfen Sie vor dem Fliegen unbedingt alle beweglichen und gelagerten Teile auf Leichtgängigkeit. Sie müssen
leicht beweglich sein, dürfen aber kein Spiel aufweisen.
c) Abgleich der Neutrallage
Damit die Stabilisierung des QuadroCopters korrekt arbeitet, muss die Neutrallage eingestellt werden. Dies ist die
Position, die der QuadroCopter versucht zu stabilisieren, sofern kein anderes Flugmanöver gewünscht ist.
Gehen Sie dabei in folgender Reihenfolge vor:
1) Schalten Sie den Sender ein
2) Stellen Sie GAS auf null und alle anderen Hebel und Trimmungen in die Neutralstellung
3) Stellen Sie den QuadroCopter auf eine waagrechte, ebene Fläche!
4) Schließen Sie den Akku an den QuadroCopter an
5) Die rote LED des QuadroCopters muss AUS und die grüne AN sein
6) Bewegen Sie GAS auf Vollausschlag und GIER auf rechten
Vollausschlag (Bild 14)
7) Die grüne LED des QuadroCopters blinkt als Bestätigung und die Neutrallage ist abgespeichert.
8) Bewegen Sie das GAS wieder auf Null, GIER, NICK und ROLL in die Neutralstellung
9) Die rote LED ist AUS und die grüne LED AN -> Der QuadroCopter ist nun flugbereit!
Bild 14
25

Sollten Sie die Neutrallage nicht einstellen, so verwendet der QuadroCopter entweder die Werkseinstellung oder den
zuletzt gespeicherten Wert!
Es ist von entscheidender Bedeutung, die Neutrallage des QuadroCopters möglichst genau einzustellen.
Hierzu ist es notwendig, die Neutrallage auf einer absolut horizontalen Unterlage einzustellen. Idealerweise misst man diese mit einer Wasserwaage aus.
Aufgrund anderer Umgebungsbedingungen als im Werk bzw. am tatsächlichen Flugort kann die Werkseinstellung
nicht ideal sein! Vor einem Erstflug wird deshalb dringend empfohlen, die Neutrallage einzustellen.
Falls der QuadroCopter trotz entsprechenden Trimmungen am Sender immer noch nach einer Richtung ausbricht,
muss die Neutrallage nochmals abgespeichert werden, in dem der QuadroCopter leicht an der Seite angehoben wird,
in die der QuadroCopter ausbricht. Somit speichert man diese (manipulierte) Position als neue Nulllage ab.
26

11. Sicherheitseinrichtungen
Der QuadroCopter ist mit einer Reihe von Sicherheitseinrichtungen versehen, die das Modell vor Schäden bewahren
bzw. mögliche Schäden auf ein Minimum reduzieren sollen. Sie Schutzmechanismen werden per LED-Anzeigen
kenntlich gemacht. Beachten Sie hierzu auch das nachfolgende Kapitel 12 „LED-Anzeigen“.
a) Motorschutz
Die Steuerelektronik verfügt über einen Motorschutz, die alle Motoren bei einem Blockieren eines Rotors (z. B. nach
einem Absturz) sofort automatisch abschaltet. Nach einer Überprüfung auf eventuelle Schäden können die Motoren
mittels des normalen Steuerkommandos „Start der Motoren“ wieder gestartet werden.
b) Notlandung
Stellt die Steuerelektronik des QuadroCopter zu starke Störungen des Fernsteuersignals fest, versucht sie, den
QuadroCopter in einer waagrechten Position auszurichten.
Ist die Störung des Empfangs weiterhin vorhanden, so wird das Gas auf einen Wert knapp unter Schwebeflug (ohne
Zusatzgewicht) gestellt und der QuadroCopter beginnt einen Sinkflug.
Ist die Störung des Empfangs vorbei, kann der Modellpilot jederzeit durch eigene Steuerkommandos eingreifen und
das Notlandeprogramm wird beendet.
c) Unterspannungsüberwachung
Der QuadroCopter überwacht ständig die Spannung des angeschlossenen Akkus. Sinkt diese über einen bestimmten
Zeitraum unter einen kritischen Wert, so wird dies durch die LEDs angezeigt.
Dabei blinkt die rote LED und die grüne LED leuchtet dauernd. Diese Anzeige kann nur durch Abstecken des Akkus
abgeschaltet werden.
Um im Flug einen schwachen Akku festzustellen, empfiehlt es sich, zeitweise starke Gasschübe durchzuführen. Reagiert der QuadroCopter träge und schwach, so sollte eine Landung durchgeführt und der Akku überprüft werden.
Dieser Test ist allerdings aufgrund der Leistung nur schwer erkennbar.
Bei einem längeren ununterbrochenen Flugbetrieb empfiehlt es sich ferner, auch die LED-Anzeigen durch eine zeitweise Landung zu überprüfen!
Tipp aus der Praxis: Um Schäden am QuadroCopter durch Absturz wegen Unterspannung bzw. am Akku durch
Tiefentladung zu vermeiden, empfehlen wir, im Flug unbedingt die Leuchtsignale zur Unterspannungsanzeige zu
beachten. Da die eingebauten LEDs nur in eine Richtung abstrahlen, empfehlen wir den zusätzlichen Einbau des
LiPo-Savers (Conrad Best.-Nr. 230327). Der Lipo-Saver zeigt Ihnen per Lichtsignal eine drohende Unterspannung
an. Platzieren Sie den LiPo-Saver an geeigneter Stelle im QuadroCopter und schließen diesen z.B. über den
Balanceranschluss des Akkus an.
d) Finderfunktion
Bei fehlendem Sendersignal bzw. bei ausgeschaltetem Sender gibt der eingeschaltete QuadroCopter automatisch
ein akustisches Signal (Pieptöne) ab. Im Falle einer Außenlandung im hohen Gras oder in einem Korn- bzw. Maisfeld
kann er so leicht wieder gefunden werden.
27

12. LED-Anzeigen
Die folgenden LED-Anzeigemöglichkeiten sind keine Sicherheitsanzeigen, sondern deuten nur auf bestimmte Betriebszustände hin. Die LEDs für nachfolgend beschriebene Anzeigen finden Sie auf dem Controlboard (siehe Bild 8).
a) Ready to Fly
Nach dem Sie den Flugakku angeschlossen und die Motoren noch nicht gestartet haben, leuchtet die grüne LED und
die rote LED ist aus. Ihr QuadroCopter ist startbereit. Ist dies nicht der Fall, liegt eine Störung vor. Beachten Sie
nachfolgende Hinweise in diesem Kapitel.
b) Start des Quadrokopters
Sie starten die Motoren. Die rote LED leuchtet nun dauernd und die grüne LED blinkt. Nach ca. zwei Sekunden
leuchtet auch die grüne LED dauerhaft. Ist dies nicht der Fall, liegt eine Störung vor. Beachten Sie nachfolgende
Hinweise in diesem Kapitel.
c) Konfigurationsmodus
Während der Konfiguration der Fernsteuerung zeigt die rote LED den Programmierschritt und die grüne LED den zu
programmierenden Kanal durch entsprechendes Blinken mit Pausen an.
d) RC-Offsetabgleich
Nach dem Anstecken des Flugakkus blinken die rote und die grüne LED im schnellen Rhythmus und zeigen den
Abgleich von Sender und Elektronik des QuadroCopters an. Nach erfolgreichem Abgleich geht die rote LED aus und
die grüne LED leuchtet dauernd.
e) Abgleich der Neutrallage
Wird ein Abgleich der Neutrallage durchgeführt, blinkt die grüne LED im schnellen Rhythmus. Die rote LED ist aus.
Die folgenden LED-Anzeigemöglichkeiten sind Sicherheitsanzeigen. Die Ursachen hierfür müssen erforscht
und abgestellt werden.
f) Gestörte Funkverbindung vor dem Start
Sie wollen starten und die Motoren sind noch aus. Die rote und die grüne LED blinken langsam im Gegentakt und
signalisieren eine gestörte Funkverbindung.
Mögliche Ursachen: Empfängerquarz aus dem Sockel gefallen; Empfängerquarz defekt; Empfängerantenne abgerissen. Senderantenne nicht ausgezogen; zweiter Sender mit gleichem Sendekanal eingeschaltet; Batterien/Akkus
vom Sender leer. Überprüfen Sie die mögliche Ursachen und starten Sie dann neu.
Sollte im Flug eine dauerhafte Funkstörung bestehen, so leitet der QuadroCopter eine Notlandung ein und die LEDs
zeigen auch hier durch gegenseitiges Blinken eine gestörte Funkverbindung an.
28

g) Gestörte Funkverbindung im Flugbetrieb
Sie wollen starten und die Motoren sind bereits an oder während des Flugbetriebs. Die rote und die grüne LED blinken
langsam im Gegentakt und signalisieren eine gestörte Funkverbindung.
Mögliche Ursachen: Empfängerquarz aus dem Sockel gefallen; Empfängerquarz defekt; Empfängerantenne abgerissen. Senderantenne nicht ausgezogen; zweiter Sender mit gleichen Sendekanal eingeschaltet; Batterien/Akkus
vom Sender leer. Überprüfen Sie die mögliche Ursache und starten Sie dann neu.
Sollte im Flug eine dauerhafte Funkstörung bestehen, so leuchtet der QuadroCopter eine Notlandung ein und die
LEDss zeigen auch hier durch gegenseitiges Blinken eine gestörte Funkverbindung an.
h) Notlandefunktion
Während des Betriebs herrscht eine dauerhafte Funkstörung vor. Der QuadroCopter leitet selbstständig eine Notlandung ein. Die rote und grüne LED blinken langsam und gleichzeitig. Suchen Sie an Hand der vorher aufgezeigten
möglichen Fehlerursachen.
i) Unterspannungsüberwachung
Die Akkuspannung wird permanent überwacht. Bei Unterschreitung einer bestimmten Akkuspannung (Schwellwert
ca. 9,4 V) fängt die rote LED an im schnellen Rhythmus an zu blinken. Die grüne LED leuchtet dauernd. Diese
Anzeige kann nur noch durch Abstecken des Flugakkus zurückgesetzt werden. Wenn die rote LED blinkt, sollten Sie
schnellstens eine Landung einleiten und den Flugbetrieb einstellen.
Sollte an den QuadroCopter ein nicht vollständig geladener Akku angeschlossen werden, kann es ebenfalls zu einer Unterspannungserkennung kommen. Laden Sie in diesem Fall den Flugakku erst vollständig
auf und probieren Sie den Start erneut.
29

13. Informationen zum Combiboard QC08
a) Anschlusskontakte bzw. Jumper-Stecker des Combiboards
PAD1: Plus-Lötanschluss für die Versorgungsspannung (+)
PAD2: Minus-Lötanschluss für die Versorgungsspannung (-)
LD1: Grüne LED-Kontroll-Leuchte
LD2: Rote LED-Kontroll-Leuchte
X1: Jumper-Stecker für den Summer
X2: Jumper-Stecker für den Lichtmodus
X3: Anschluss-Kontakte für LED bzw. LED-Streifen 1 - 4
X4: Anschluss-Kontakte für LED bzw. LED-Streifen 5 – 8
X5: Anschluss-Kontakte für Servo 1 (Kanal 5)
X6: Anschluss-Kontakte für Servo 2 (Kanal 6)
X7: Anschluss-Kontakte für Servo 3 (Kanal 7)
X8: Anschluss-Kontakte für Servo 4 (Kanal 8)
X9: Anschluss-Kontakte für ein externes RC-Eingangssignal
X10: Anschluss-Leiste für das Interface-Flachbandkabel
X11: Jumper-Stecker für die Schnittstellen-Auswahl
X12: Serielle Schnittstelle
X13: Anschluss-Buchse für die Empfängerkabel
X14: Anschluss-Kontakte für das Summensignal
X15: Programmierstecker für produktionsbedingte Einstellungen
SW1: Jumper-Stecker für die Auswahl des RC-Eingangs
SW2: Reset-Taster
BUZ1: Summer
X10
X10
BUZ1
SW2
X1
R23
R23
C14
C14
C15
C15
C12
C12
C13
C13
C8
C8
C9
C9
C10
C10
C11
C11
C16
C16
X12
X11
R7
R45
R1
R2
R2
SW1
X7
X8
LD2
R43
X2
R6
R3
R44
IC1
C1
Q1
Q1
C2
T3
T3
X3
T2
T2
T5
T5
T4
T4
LD1
R41
R42
R21
X4
X9
IC2
X5
X6
R22
X15
IC3
C3
30
X13
C17
R40
D1
C4
Q2
C18
C19
+
X14
PAD1
-
PAD2
Bild 15

b) Summensignal-Ausgang
Der Summensignalwandler gibt das gebildete
Summensignal (SuS) am oberen Kontakt des Anschlusses „X14“ aus.
Dieses Summensignal besteht aus so vielen Einzelsignalen wie an den Eingängen gemessen wurden.
Wird beispielsweise ein 6-Kanal Empfänger verwendet, so hat das Summensignal ebenfalls 6
Kanäle.
Die Erkennung der Kanalanzahl erfolgt über die
gültige Signalmessung an den Eingängen.
Die Anschlüsse „SuS“, „+5V“ und „GND“ sind mit
den entsprechenden Anschlüssen der Hauptplatine
(Bild 16b) im QuadroCopter zu verbinden.
Achten Sie auf die polungsrichtige Verbindung der
beiden Stiftleisten!
c) LED-Statusanzeige
Der Summensignalwandler verfügt über eine grüne und eine rote LED zur Statusanzeige.
Eine grün leuchtende LED (LD1) zeigt an, dass sich
die Elektronik im normalen Betriebsmodus befindet. Dies bedeutet, es können Servosignale gemessen und gegebenenfalls ein Summensignal erzeugt
werden.
Erlischt die grüne LED, liegt eine grundlegende
Störung in der Elektronik vor.
Eine rot leuchtende LED (LD2) zeigt an, dass keine Servosignale vorhanden sind. Die Ursachen
hierfür können beispielsweise Empfangsstörungen,
fehlende Stromversorgung des Empfängers, ausgeschalteter Sender oder Kontaktfehler in den Anschlussleitungen sein.
+
PAD1
X14
-
PAD2
+
PAD1
X14
-
PAD2
SuS
+5V
C18
GND
C19
C18
C19
X13
D1
LD2
R42
R41
X15
R43
R21
R22
X6
C4
R40
Q2
C17
LD1
IC3
Bild 16a
Bild 16b
X13
D1
Rot
LD1
C4
R40
Q2
C17
LD1
IC3
Rot
LD2
R42
R41
X15
R43
LD2
R21
R22
X6
Bild 17
31

Verhalten bei Empfangsstörungen
Der Summensignalwandler misst die Qualität der Signale und erkennt somit auch Empfangsstörungen.
Da die Kanäle 1 - 4 überwiegend zur grundlegenden Steuerung von Modellen verwendet werden, liegt hierbei ein
spezielles Augenmerk auf diesen Kanälen.
Störungen auf den Kanälen 1 – 4
Bei den Kanälen erfolgt eine Prüfung auf eine gültige Pulsbreite (zwischen 1 und 2 ms). Wird dabei ein Fehler erkannt,
so wird das Summensignal mit dem zuletzt gültigen Wert generiert.
Übersteigt die Fehlerrate das Maß für einen vernünftigen Empfang, so gibt der Summensignalwandler kein Summensignal mehr aus und aktiviert die rote LED. Somit kann das Empfangsproblem von der nachgeschalteten Logik erkannt werden und es werden keine Empfangsprobleme verschleiert.
Ist das Eingangssignal wieder gültig, so erlischt die rote LED wieder und es wird ein Summensignal erzeugt.
Störungen auf den Kanälen 5 – 8
Wirkt sich die Empfangsstörung nur auf die Kanäle 5 - 8 aus, so wird weiterhin ein Summensignal der Kanäle 1 - 4
erzeugt und die Kanäle 5 - 8 werden mit einer ungültigen Pulslänge ausgegeben.
Dadurch ist weiterhin eine grundlegende Steuerung des Modells möglich, die Störung kann aber durch eine nachgeschaltete Logik an den Kanälen 5 - 8 erkannt werden.
Ist das Eingangssignal wieder gültig, so wird ein reguläres Summensignal ausgegeben.
d) Interface-Anschluss
Für die Verbindung des Combiboards mit dem
Controlboard des QuadroCopters liegt dem Combiboard ein 26poliges Folienkabel bei, das an der
Anschluss-Leiste für das Interface-Flachbandkabel
(„X10“) angesteckt werden muss.
Achten Sie später beim Einbau des Combiboards
in den QuadroCopter darauf, dass die beiden Anschlussleisten für das Interface-Flachbandkabel
(Combiboard und Controlboard) genau gegenüber
liegen.
Der Anschluss erfolgt dann in gleicher Weise, wie
die Verbindung der beiden Motortreiber-Platinen
zum Controlboard.
IC2
X10
X10
C16
C9
C16
1
R2
R2
T4
T4
X9
X4
C8
C9
C8
C13
C10
C10
C13
C12
C12
C15
C15
C14
C14
R23
R23
C11
C11
26
T3
T5
T5
T3
T2
T2
X3
Q1
Q1
C2
C3
32
Bild 18

e) Servo-Anschluss
Wenn das Combiboard im QuadroCopter eingebaut ist und die Fernsteuerung eingelernt wurde,
können bis zu vier Servos (Kanal 5 – 8) angeschlossen und per Fernsteuerung bedient werden.
Dies ist jedoch nur dann möglich, wenn Sender und
Empfänger diese Funktion zur Verfügung stellen
und die jeweiligen Empfängerausgänge am Eingangsstecker des Summensignalwandlers („X13“)
angeschlossen wurden.
Folgende Steckkontakte sind für den ServoAnschluss vorgesehen:
X5: Servo 1 (Empfängerausgang/Kanal 5)
X6: Servo 2 (Empfängerausgang/Kanal 6)
X7: Servo 3 (Empfängerausgang/Kanal 7)
X8: Servo 4 (Empfängerausgang/Kanal 8)
Bitte beachten Sie beim Anschluss der Servos, dass die Impulsleitung (PPM) immer mit dem oberen Pin
der drei Kontaktstecker verbunden werden muss!
R42
R41
X15
R43
PPM
LD2
+
-
R21
R22
X6
X11
X8
X7
PPM
+
X5
X10
X10
X12
SW1
IC2
X9
R2
R2
T
-
Bild 19
33

14. Funktionsweise Light & Sound
a) Grundsätzliche Informationen
Das Combiboard besitzt neben den Summensignalwandler noch acht LED-Ausgänge („L1“ bis „L8“), sowie drei digitale Eingänge („IN-1“, „IN-2“, „IN-3“) und einen externen RC-Eingang („PPM“).
Die Ansteuerung der LED-Ausgänge können über 7 verschiedene Modi konfiguriert werden.
Dabei wird von der Elektronik entweder ein fixes Muster auf den Ausgängen generiert oder die Ausgänge werden in
Abhängigkeit von den Eingangssignalen geschaltet. Die über Jumper einstellbaren Modi können zusätzlich mittels
eines RC-Signals (Kanal 5, 6, 7, 8 oder extern) in drei Zustände geschaltet werden. Dadurch ergibt sich die Möglichkeit eines Umschaltens während des Fluges.
Digitale Eingänge:
Die digitalen Eingänge schalten die jeweiligen Ausgänge, wenn der entsprechende Modus gewählt wurde. Ein High
Signal (+5 V) bedeutet dabei einen eingeschalteten Ausgang. Die angeschlossene LED bzw. der angeschlossene
LED-Streifen leuchtet.
Die drei digitalen Eingänge befinden sich am Interface-Anschluss „X10“ und sind folgendermaßen belegt:
IN-1 = Kontakt 6
IN-2 = Kontakt 5
IN-3 = Kontakt 16
X10
X10
C16
C9
C11
C11
IN-1
C10
C10
T5
T5
C8
C9
C8
C13
C13
C12
C12
C15
C15
C14
C14
R23
IN-3
T2
T2
R23
T3
T3
Q1
Q1
C16
IN-2
R2
R2
T4
T4
34
IC2
X9
X4
X3
C2
C3
Bild 20
Über die 3 digitalen Eingänge können verschiedene Statusanzeigen oder Fehlermeldungen des QuadroCopters gut sichtbar angezeigt werden. Die Funktionalität der ausgegebenen Signale ist aber zum großen
Teil von der verwendeten Firmware abhängig und kann sich im Zuge der Weiterentwicklung des QuadroCopters ändern. Eine genaue Beschreibung mit der Belegung der 3 digitalen Eingänge können Sie der
Text-Datei der jeweiligen Firmware entnehmen.
RC-Eingang:
g
f
g
f
g
f
g
f
g
f
g
f
g
f
Mit Hilfe des RC-Eingangs können Sie jeden Lichtmode in drei verschiedene Schaltzustände bringen. Verwenden Sie
dazu am Sender einen Umschalter mit Mittelstellung (High, Neutral, Low) oder einen Schiebe- bzw. Drehregler. Für
die Umschaltung des Lichtmodes kann der Kanal 5 – 8 oder ein extern eingespeistes Servosignal (PPM) verwendet
werden.
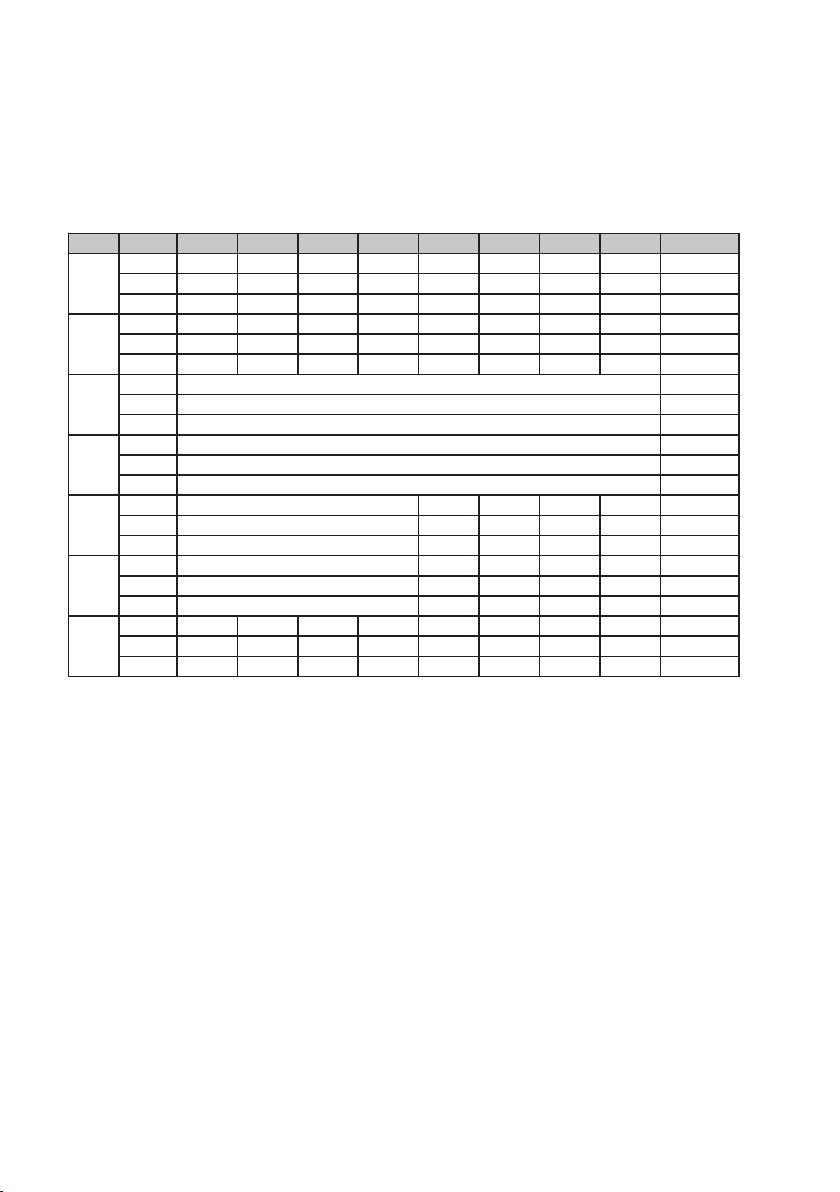
In Verbindung mit den 7 unterschiedlichen Modi ergeben sich dann folgende Lichtmuster:
Mode PPM L1 L2 L3 L4 L5 L6 L7 L8 Summer
Hi
h IN-1 IN-2 IN-3 DF SF SB DF Bat Bat
1 Neutral IN-1 IN-2 IN-3 DF SF SB Of
Low IN-1 IN-2 IN-3 DF SF SB On Bat Bat
Hi
h IN-1 IN-2 IN-3 DF SF SB DF Bat IN-3
2 Neutral IN-1 IN-2 IN-3 DF SF SB Of
Low IN-1 IN-2 IN-3 DF SF SB On Bat IN-3
Hi
h Lauflicht L1 nach L8 IN-3
3 Neutral Of
Low Lauflicht L8 nach L1 IN-3
Hi
h Invertiertes Lauflicht L1 nach L8 IN-3
4 Neutral Of
Low Invertiertes Lauflicht L8 nach L1 IN-3
Hi
h Lauflicht L1 nach L4 IN-1 IN-3 SB Bat IN-3
5 Neutral Of
Low Lauflicht L4 nach L1 IN-1 IN-3 SB Bat IN-3
Hi
h Invertiertes Lauflicht L1 nach L4 IN-1 IN-3 SB Bat IN-3
6 Neutral Of
Low Invertiertes Lauflicht L4 nach L1 IN-1 IN-3 SB Bat IN-3
Hi
h WB1 WB2 IN-1 IN-2 IN-3 SF DF Bat IN-3
7 Neutral WB1 WB2 IN-1 IN-2 IN-3 SF Of
Low WB1 WB2 IN-1 IN-2 IN-3 SF On Bat IN-3
IN-1 IN-3 SB Bat IN-3
IN-1 IN-3 SB Bat IN-3
Bat Bat
Bat IN-3
IN-3
IN-3
Bat IN-3
Bedeutungen der Abkürzungen:
SB: Slow Blink (400 ms ein, 400 ms aus)
FB: Fast Blink (200 ms ein, 200 ms aus)
SF: Single Flash (50 ms, 1 s Pause)
DF: Double Flash (50 ms, 50 ms, 1 s Pause)
Bat: Batterie-Warnung in 5 Stufen (>9,4 V = OFF; <9,4 V = SF; <9,2 V = DF; <9,0 V = SB; <8,8 V = FB)
WB1, WB2: Wechselblinker (Wechsel alle 100 ms)
Lauflicht Geschwindigkeit: Wechsel alle 100 ms
35

b) Auswahl des Lichtmodus
Die 7 Lichtmodi können mit Hilfe der Jumper-Stecker („X2“) eingestellt werden. Je nach gewünschtem Mode müssen
die einzelnen Kontakte mit einer Kurzschluss-Brücke (Jumper) verbunden werden. Für die jeweiligen Modes sind
folgende Brücken zu setzen:
Mode 1: Kein Jumper
R45
R44
BUZ1
1
X1
R7
R6
R3
X2
2
Mode 2: Jumper 1 - 2
Mode 3: Jumper 3 - 4
Mode 4: Jumper 1 - 2 und Jumper 3 - 4
Mode 5: Jumper 1 - 3
Mode 6: Jumper 2 - 4
Mode 7: Jumper 1 - 3 und Jumper 2 – 4
C12
C12
C15
C15
C14
C14
T3
T3
R23
R23
SW2
R1
Q1
Q1
C1
X3
C2
C3
IC1
3
5
4
6
Bild 21
36

c) Auswahl des RC-Eingangs
Der gewünschte RC-Eingang zum Umschalten der Lichteffekte kann mit Hilfe der Jumper-Stecker SW1 eingestellt
werden. Dabei muss immer der obere und der untere Kontakt mit der Kurzschluss-Brücke (Jumper) verbunden werden.
Die Zuordnung ist dabei wie folgt:
Servoauswahl 1 = Kanal 5
Servoauswahl 2 = Kanal 6
Servoauswahl 3 = Kanal 7
Servoauswahl 4 = Kanal 8
R42
R41
X15
R43
LD2
R21
R22
X6
X11
X8
X7
PPM
1
X12
2
SW1
X5
In der nebenstehenden Abbildung ist der Jumper auf Servoauswahl 1 gesetzt. Die Umschaltung des eingestellten
Lichtmodus kann nun am Sender über Kanal 5 erfolgen. Die Ansteuerung über Kanal 5, 6, 7 oder 8 ist aber nur dann
möglich, wenn sie auch von der Hauptsteuerung erzeugt wird. Die Signalerzeugung ist dabei vom Summensignalwandler unabhängig!
Sollte dies nicht der Fall sein, so können Sie am linken Anschluss-Kontakt des Steckers „X9“ ein externes ServoSignal (PPM) von einem noch nicht belegten Empfängerausgang (z.B. Kanal 9) direkt einspeisen. Sollten Sie keinen
RC-Eingang nutzen und somit auf die Umschaltmöglichkeit verzichten, so ist immer der PPM-Schaltzustand „High“
aktiv!
3
IC2
X9
4
R2
R2
X10
X10
T
Bild 22
37

d) Anschluss der LED-Streifen/LEDs
Das Combiboard bietet die Möglichkeit bis zu acht LED-Streifen mit einer Betriebsspannung von 12 V und einer
maximalen Stromaufnahme von 1 A pro Streifen direkt anzuschließen. Auch wenn die MOSFET-Schaltausgänge
(FDS6890A) mit bis zu 7,5 A belastbar sind, wird aufgrund des Bord-Layouts und der Kühlung empfohlen, die einzelnen Ausgänge nicht höher als mit 1 A zu belasten.
Wenn Sie einzelne LEDs anschließen wollen, die eine geringere Betriebsspannung von lediglich 2 – 3 V aufweisen,
so muss ein geeigneter Vorwiderstand (Rv) berechnet werden. Zur Berechnung des Vorwiderstandes sollten Sie mit
einer Betriebsspannung von 12 V arbeiten, da ein frisch geladener 3zelliger LiPo-Akku anstelle von 11,1 V weit über
12 V aufweisen kann.
Rechenbeispiel:
Angenommen, die verwendete Leuchtdiode hat eine Versorgungsspannung von 2,6 V und eine Stromaufnahme von
20 mA. Nun muss zunächst die Spannung am Vorwiderstand ausgerechnet werden:
12 V - 2,6 V = 9,4 V
Sollten Sie zwei gleiche Leuchtdioden hintereinander schalten wollen, so sind 2 x 2,6 V = 5,2 V von der Betriebsspannung 12 V abzuziehen (12 V - 5.2 V = 6.8 V).
Bei drei gleichen Dioden sind es 3 x 2.6 V = 7.8V, die von der Betriebspannung 12 V abzuziehen sind (12 V - 7.8 V =
4.2 V).
Nun kann nach dem Ohm’schen Gesetz R = U : I der Vorwiderstand Rv berechnet werden:
Rv = 9,4 V : 0,02 A = 470 Ohm
Mit der Leistungsformel P = U x I kann noch die Leistung berechnet werden, die der Vorwiderstand aushalten muss:
9,4 V x 0,02 A = 0,188 W
Ein Widerstand mit einer Leistung von ¼ W (0,25 W) wäre demzufolge ausreichend. Für den Anschluss der LEDs
bzw. LED-Streifen sind jeweils die oberen Anschluss-Kontakte der Stecker „X3“ („L1“ bis „L4“) und „X4“ („L5“ bis „L8“)
vorgesehen. Die unteren Anschluss-Kontakte sind mit dem Plus-Anschluss (+) des Antriebsakkus (11,1 V vom LiPoAkku) verbunden.
X10
IC2
X10
C16
C11
C10C9C8
C13
C12
C15
C16
C11
C10C9C8
R2
R2
X9
L5
L6
T5
T5
T4
T4
L8
L7
X4
-
+
12 V
-
C13
T2
T2
L1
C14
C12
C15
C14
R23
R23
T3
T3
Q1
Q1
L3
L2
X3
+
Rv
C2
C3
LED
L4
Bild 23
Anschluss-Schema
Bild 23 zeigt Ihnen den schematischen Anschluss
einer LED mit Vorwiderstand am Ausgang am Ausgang „L1“ und den Anschluss eines 12 VLeuchtstreifens am Anschluss „L7“.
Wichtig!
Bitte achten Sie beim Anschluss von
LEDs und LED-Leuchtstreifen auf die
korrekte Polung der Anschlussleitungen.
In der Praxis haben sich konfektionierte BEC-Buchsen mit offenen Kabelenden bestens für den LEDAnschluss bewährt.
38

e) Summer-Konfiguration
Der Summer kann mit Hilfe des Jumper-Steckers
(„X1“) ein- oder ausgeschaltet werden.
Sind die Kontakte 1 und 2 mit Hilfe einer
Kurzschluss-Brücke verbunden, ist der Summer
aus.
Sind die Kontakte 2 und 3 mit Hilfe einer
Kurzschluss-Brücke verbunden, ist der Summer
aktiv und gibt die Signale entsprechend der ModiTabelle aus.
C12
C12
C15
C15
C14
C14
T3
T3
R23
R23
SW2
BUZ1
3
X1
2
R44
R7
1
R6
R3
X2
R45
R1
Q1
Q1
C1
X3
C2
C3
IC1
Bild 24
39

15. PC-Anschluss des Combiboards
Das Combiboard verfügt, ebenso wie das Controlboard des QuadroCopters, über eine serielle Schnittstelle. Über
diese beiden Schnittstellen können die Elektroniken mit einem PC kommunizieren.
Mit Hilfe des Jumpers „X11“ kann die serielle Schnittstelle des Combiboards entweder über das 26polige Interfacekabel zum Controlboard des QuadroCopters (2. Interne Schnittstelle) kommunizieren oder auf den SchnittstellenAnschluss „X12“ geschaltet werden. Diese Funktion wird für zukünftige Erweiterungen verwendet und ist im Moment
ohne Funktion.
Sind die Kontakte 1 und 2 mit Hilfe einer Kurzschluss-Brücke verbunden, ist die Schnittstelle am Controlboard des
QuadroCopters aktiviert.
Sind die Kontakte 2 und 3 mit Hilfe einer Kurzschluss-Brücke verbunden, ist die Schnittstelle am Combiboard („X12“)
aktiviert.
Die Pin-Belegung des Schnittstellensteckers „X12“ können Sie Bild 25 entnehmen.
3
2
1
X10
X10
40
R42
R41
X15
R43
LD2
R21
R22
X6
X11
X8
X7
GND
TXD RXD
X5
X12
SW1
IC2
X9
+5V
R2
R2
T
Bild 25

16. Informationen zum ersten Start
a) Allgemeines Steuerverhalten
Grundsätzlich ist ein QuadroCopter vom Steuerverhalten wie ein normaler Helikopter zu sehen. Die Unterschiede
liegen jedoch im Detail. Bei Helikoptern wird der Drehmomentausgleich durch spezielle Gyros (in der Gier-Funktion)
stabilisiert. Hierbei gibt es zwei unterschiedliche Systeme: „Normale Gyros“ oder Gyros mit der Funktion „Heading
Lock“.
Normale Gyros stabilisieren (dämpfen) den Heckrotor gegen Drehbewegungen, die verursacht durch den Piloten
(Drehzahl- bzw. Pitch-Änderungen) bzw. äußeren Einwirkungen (z.B. Seitenwind) entstehen. Ein Gyro mit „Heading
Lock“-Funktion hat dagegen eine „Haltewirkung“ gegen diese Drehbewegungen. Beide Systeme reagieren nach einem Steuerbefehl, z.B. „Gier nach links“ und anschließender Neutralstellung mit einem sofortigen Stillstand der Drehbewegung.
In Ihrem QuadroCopter sind - abweichend von herkömmlichen Helikoptern - drei Gyros auf den Funktionen Gier, Nick
und Roll eingebaut. Die eingebauten Gyros sind - verglichen mit herkömmlichen Gyros - weder als „normaler Gyro“
noch als Gyro mit „Heading Lock“-Funktion zu bezeichnen.
Die Gyros im QuadroCopter sind in der Art miteinander verknüpft, dass der QuadroCopter nach Beendigung eines
Steuerbefehls immer versucht, wieder in die Neutrallage (Schwebeflug) zu gelangen. Wie gut dies gelingen kann, ist
natürlich abhängig von den zur Verfügung stehenden Platzverhältnissen, der Fluggeschwindigkeit bzw. dem vorherrschenden Flugzustand, den Trimmwerten des QuadroCopters sowie den äußeren Flugbedingungen wie z.B. Wind.
b) Starten der Motoren
Wichtig!
Stellen Sie vor dem Einschalten des Senders den Gasknüppel auf „Motoren aus“ und alle Trimmhebel der
Steuerknüppel auf null (Trimmung Mitte). Andernfalls könnte es sein, dass der QuadroCopter nach dem
Anschluss des Flugakkus den Sender nicht erkennt.
• Nach dem Anschluss des Flugakkus zeigen die LEDs „Ready to Fly“ an.
• GAS auf null, GIER auf Vollauschlag nach links, NICK und ROLL auf neutral (siehe auch Bild 10)
• Rotoren beginnen nacheinander zu drehen und gehen auf Leerlaufdrehzahl
• Rote LED leuchtet dauernd und die grüne LED blinkt („Motoren an“)
• GAS langsam erhöhen zum Abheben (Schwebeflug)
c) Stoppen der Motoren
Die laufenden Motoren können folgendermaßen abgestellt werden:
• GAS auf null, GIER auf Vollausschlag nach rechts, NICK und ROLL auf Neutral
• Rotoren stoppen
• Rote LED ist aus, grüne LED leuchtet dauernd („Ready to Fly“)
41
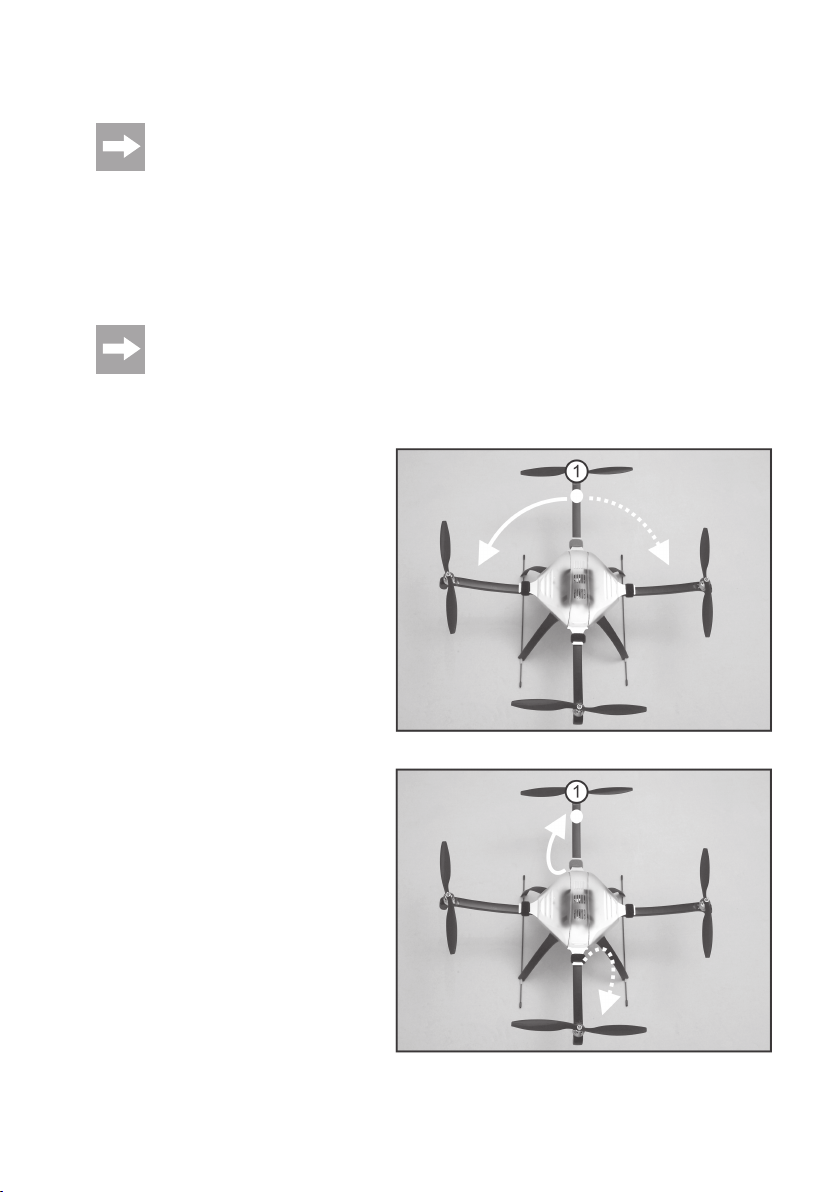
d) Schwebeflug
Um die Erklärung der Steuerung einfacher und einheitlicher zu gestalten, werden auch hier die klassischen Begriffe verwendet. Diese kommen aus der Fliegersprache und sind weit verbreitet.
Richtungsbezeichnungen sind dabei stets aus der Perspektive eines „virtuellen“ Piloten im Modell zu verstehen. Der
Ausleger mit dem aufgeklebten Pfeil gilt als „vorne“. Die Erklärungen basieren alle auf einer Konfiguration der Fernsteuerung im Mode 2.
Als „Schweben“ wird jener Flugzustand bezeichnet, an dem der QuadroCopter weder steigt noch sinkt, somit die nach
oben gerichtete Auftriebskraft gleich der nach unten gerichteten Gewichtskraft ist. Dies wird in etwa bei mittlerer
Gasstellung erreicht (allerdings abhängig von einer eventuell vorhandenen Nutzlast).
Bei einem Flug knapp über dem Boden sowie beim Start entstehen Verwirbellungen und Luftströmungen,
die den QuadroCopter beeinflussen. Dadurch ergibt sich eine schnellere Reaktion auf die Steuerbewegungen sowie ein leichtes Ausbrechen des QuadroCopter nach vorne, hinten oder zur Seite.
e) Gier
Als „Gier“ wird die Drehung des QuadroCopter um
die Hochachse (senkrechte Achse) genannt. Diese Bewegung tritt entweder ungewollt aufgrund des
Drehmoments der Rotoren oder gewollt als Flugrichtungsänderung auf. Beim QuadroCopter wird
diese Bewegung nicht mit einem Heckrotor kontrolliert, sondern durch Drehzahländerung der einzelnen Rotoren zueinander.
Der Punkt (1) zeigt „vorne“ an.
f) Nick
Als „Nick“ wird die Bewegung um die Querachse
bezeichnet, vergleichbar mit der Nickbewegung
eines Kopfes. Dadurch gewinnt der QuadroCopter
an Fluggeschwindigkeit vorwärts bzw. rückwärts
oder bremst ab.
Der Punkt (1) zeigt „vorne“ an.
42
Bild 26
Bild 27

g) Roll
Als „Roll“ wird die Bewegung um die Längsachse
bezeichnet, vergleichbar mit dem Seitwärts-Rollen
einer Kugel (oder dem Seitwärts-Gehen einer Krabbe). Dadurch bewegt sich durch Anheben der linken Seite der QuadroCopter unabhängig seiner
Vorwärtsrichtung zur rechten Seite.
Der Punkt (1) zeigt „vorne“ an.
Bild 28
43

17. Der erste Flug
Wichtig!
Stellen Sie vor dem Einschalten des Senders den Gasknüppel auf „Motoren aus“ und alle Trimmhebel der
Steuerknüppel auf null (Trimmung Mitte). Andernfalls könnte es sein, dass der QuadroCopter nach dem
Anschluss des Flugakkus den Sender nicht erkennt.
Schalten Sie die Fernsteuerung ein. Schließen Sie danach den Flugakku an. Der QuadroCopter quittiert einen kurzen
Selbsttest mit einem Dauerleuchten der grünen LED. Im Fehlerfall blinken die LEDs. Falls ein Fehler auftritt, muss der
Akku abgesteckt und nach Beseitigung des Fehlers (z.B. Gas nicht auf Nullposition) wieder angesteckt werden. Im
Fehlerfall können die Motoren aus Sicherheitsgründen nicht gestartet werden.
Achten Sie darauf, dass der QuadroCopter möglichst waagerecht steht, wenn der Akku angesteckt wird. Bis zum
Aufleuchten der grünen LED werden alle Sensoren intern abgeglichen und während dieser Zeit darf der QuadroCopter
nicht bewegt werden. Falls der Startplatz nicht eben ist, empfiehlt es sich, den Abgleich auf einer waagerechten
Unterlage durchzuführen und die Neutrallage durch Vollgas/Gier Rechts zu speichern (siehe Kapitel „Neutrallage
einstellen“).
Starten Sie die Motoren (mit Gas auf Null, Gier links) und lassen Sie die Motoren im Standgas laufen. Kontrollieren Sie
nochmals den Lauf der Rotoren. Alle Rotoren sollten gleichmäßig in einer Ebene laufen ohne dass der QuadroCopter
vibriert. Falls ein Motor nicht anläuft, schalten Sie die Motoren wieder ab und bewegen Sie den Rotor des nicht
angelaufenen Motors um eine viertel Drehung mit der Hand. Danach starten Sie die Motoren wieder.
Idealerweise erhöhen Sie jetzt die Drehzahl der Rotoren (das Gas) des QuadroCopters langsam, bis Sie ein leichtes
Anheben feststellen können. Testen Sie die Roll- und Nick-Richtung kurz bevor der QuadroCopter zu schweben
beginnt, um sicherzustellen, dass der Sender richtig eingestellt und keine Kanalinvertierung (Steuersignale sind seitenverkehrt) vorhanden ist. Vermeiden Sie generell hektische und große Steuerbewegungen. Beobachten Sie dabei,
ob und ggf. in welche Richtung sich der QuadroCopter bewegt. Mittels Trimmung an der Fernsteuerung können Sie
ungewollte Bewegungen ausgleichen.
Wichtig!
Starten Sie niemals mit einem schlecht getrimmten Fluggerät.
Erhöhen Sie danach das Gas, bis der QuadroCopter sich mindestens einen Meter über dem Boden befindet. Versuchen Sie eine leichte Drift mit den Trimmhebeln für Gier, Nick oder Roll vorsichtig zu korrigieren.
Sobald sich der QuadroCopter ausreichend hoch in der Luft befindet, nehmen Sie das Gas wieder soweit zurück, bis
der QuadroCopter schwebt. Nun haben Sie den kritischsten Teil bereits geschafft und können sich mit langsamen und
vorsichtigen Steuerbewegungen am Gas mit dem QuadroCopter vertraut machen. Um den QuadroCopter wieder zu
landen, nehmen Sie das Gas etwas zurück, bis der QuadroCopter zu Boden sinkt. Ein etwas festeres Aufsetzen auf
dem Boden stellt dabei kein Problem dar und sollte nicht mit ruckartigen Gasbewegungen korrigiert werden.
Versuchen Sie, möglichst in der Vertikalen zu landen („Hubschrauberlandung“). Vermeiden Sie Landungen mit hohen
horizontalen Geschwindigkeiten („Flugzeuglandung“). Schalten Sie nach der Landung die Motoren ab (Gasknüppel
nach rechts unten drücken).
Üben Sie diesen Startvorgang einige Male, um ein Gefühl für den QuadroCopter zu bekommen. Sobald Sie einigermaßen sicher sind, können Sie beginnen, im Flug mit Gier, Nick und Roll die Richtung zu steuern. Steuern Sie dabei
immer langsam und gefühlvoll und üben Sie Vorgänge etwas ein, bevor Sie ein neues Flugmanöver angehen. Die
ersten Flüge sollten nicht mehr als jeweils 30 bis 60 Sekunden dauern.
44

18. Wartung, Pflege und Reparatur
a) Regelmäßige Reinigung
Der QuadroCopter ist ein sehr einfach, aber dennoch durchdacht aufgebautes Fluggerät. Es gibt keine mechanischen
Teile, die einer Schmierung oder sonstigen Wartung bedürfen. Dennoch sollten Sie den QuadroCopter nach jedem
Flugbetrieb von eventuell vorhandenen Verschmutzungen (Grashalme, Staub etc.) reinigen.
Verwenden Sie zur Reinigung ein trockenes oder leicht feuchtes Tuch und vermeiden Sie den Kontakt mit Wasser an
Elektronik, Akku und Motoren.
Fliegen Sie nicht ohne Abdeckungen der Elektronik. Achten Sie darauf, dass keine Feuchtigkeit in das Innere des
Zentralstücks eindringt (z.B. nasse Grashalme etc.). Fliegen Sie niemals bei Regen!
b) Austausch der Rotoren
Falls ein Rotor durch Absturz oder sonstige Einwirkung beschädigt ist, so sollten Sie diesen umgehend austauschen.
Dies gilt ebenso, wenn Sie feine Risse oder Haarrisse im Rotor feststellen. Aufgrund der hohen Drehzahl können sich
bei beschädigten Rotoren Materialteile ablösen und zu Beschädigung oder Gefährdung der Umgebung führen.
Zum Wechseln eines Rotors entfernen Sie die Rotorspitze mit der Federscheibe und den schadhaften Rotor. Bei der
Montage des neuen Rotors gehen Sie wie unter Kapitel „Endmontage des QuadroCopters“, unter Montage der Rotoren beschrieben vor.
Achtung!
Beachten Sie unbedingt die Drehrichtung des jeweiligen Motors und die Wahl des entsprechenden Rotors. Wird dieser falsch gewählt, so ist das Modell nicht flugfähig und es kommt zu Fehlverhalten bei einem
nachfolgenden Start des Modells! Verlust von Gewährleistung/Garantie!
c) Austausch eines Motors
Bei einem schadhaften Motor (Überhitzung, elektrischer Fehler oder Lagerschaden) ist es notwendig, diesen auszutauschen. Führen Sie dazu die angegebenen Schritte durch:
• Entfernen Sie den Rotor des schadhaften Motors.
• Entfernen Sie die obere Abdeckung, die Verstärkungsplatte und den oberen Teil des Gitterrahmens durch Lösen der
oberen Verschraubungen. Nun haben Sie freien Zugang zu den Motortreibern (Driverboard). Sie können diese
auch vorsichtig aus der Halterung ziehen, um noch besser hantieren zu können.
• Notieren Sie sich die Farben des Motoranschlusskabels an den Lötpunkten A, B und C und entlöten Sie die Kabel.
• Lösen Sie die Schrauben der Motorhalterung und entfernen Sie den Motor aus dem Motorhalter. Ziehen Sie dabei
das Kabel durch den Ausleger.
• Nehmen Sie den neuen Motor und führen Sie das Anschlusskabel durch den Ausleger. Schrauben Sie den Motor
wieder fest und löten Sie die Kabel gemäß der von Ihnen erstellten Farbtabelle wieder an.
45

Achtung!
Falls die Farben des Anschlusskabels verwechselt werden, ändert sich die Drehrichtung des Motors. Dies
führt zu einer Fehlfunktion des Modells! Vergleichen Sie sicherheitshalber die Belegung der anderen Motoren
mit der des ausgetauschten Motors. Verlust von Gewährleistung/Garantie!
• Setzen Sie die Driverboard wieder in ihre Halterung ein, kontrollieren Sie den korrekten Sitz des Flachkabels als
Verbindung zum Controlboard und montieren Sie den oberen Teil des Gitterrahmens.
• Sollten Sie mehrere Motoren austauschen wollen, so führen Sie die einzelnen Schritte für jeden Motor durch.
d) Austausch eines Auslegers
Bei Beschädigung eines Auslegers kann dieser ausgetauscht werden. Führen Sie dazu die Schritte wie unter „Austausch eines Motors“ durch. Wenn Sie den Motor vom beschädigten Ausleger entfernt haben, dann befestigen Sie
den Motor einfach am neuen Ausleger und vollenden die Schritte wie angegeben.
Entfernen Sie zum Austausch des Auslegers den oberen Teil des Gitterrahmens. Beim Entfernen des Auslegers
drehen Sie diesen leicht und ziehen Sie ihn aus dem Gitterrahmen.
e) Austausch des kompletten Rahmens
Sollte nach einem Absturz einmal mehr zu Bruch gegangen, die Elektronik aber funktionstüchtig sein, so können Sie
den kompletten Rahmen austauschen.
Entfernen Sie dazu einfach die obere und untere Abdeckung, die Verstärkungsplatte und den oberen Teil des Gitterrahmens, danach die Motoren wie unter Punkt „Austausch eines Motors“ beschrieben und setzen Sie die Motoren in
die neuen Ausleger ein. Ziehen Sie nun die Elektronik aus der Halterung und setzen Sie sie in den neuen Gitterrahmen ein. Die neuen Ausleger montieren Sie danach in den neuen Gitterrahmen.
f) Austausch der Stabilisierungsplatte
Bei einer Beschädigung der Stabilisierungsplatte kann diese ausgetauscht werden. Führen Sie dazu die Schritte wie
unter „Austausch des kompletten Rahmens“ durch.
Lösen Sie dazu die Verschraubungen der Stabilisierungsplatte mit dem Rahmen und die Klettbänder. Tauschen Sie
die beschädigte Stabilisierungsplatte gegen die neue Platte aus und schrauben Sie diese wieder fest. Abschließend
fixieren Sie die Ausleger mit den Klettbändern an der Stabilisierungsplatte.
Eine Ersatzteilliste finden Sie im Internet unter www.conrad.com im Download-Bereich zum jeweiligen
Produkt.
46
19. Entsorgung
a) Allgemein
Entsorgen Sie das Produkt am Ende seiner Lebensdauer gemäß den geltenden gesetzlichen Vorschriften.
b) Batterien und Akkus
Sie als Endverbraucher sind gesetzlich (Batterieverordnung) zur Rückgabe aller gebrauchten Batterien und Akkus
verpflichtet; eine Entsorgung über den Hausmüll ist untersagt!
Schadstoffhaltige Batterien/Akkus sind mit nebenstehenden Symbolen gekennzeichnet, die auf das Verbot der Entsorgung über den Hausmüll hinweisen. Die Bezeichnungen für das ausschlaggebende Schwer-
metall sind: Cd=Cadmium, Hg=Quecksilber, Pb=Blei (Bezeichnung steht auf Batterie/Akku z.B. unter dem
links abgebildeten Mülltonnen-Symbol).
Ihre verbrauchten Batterien/Akkus können Sie unentgeltlich bei den Sammelstellen Ihrer Gemeinde, unseren Filialen oder überall dort abgeben, wo Batterien/Akkus verkauft werden.
Sie erfüllen damit die gesetzlichen Verpflichtungen und leisten Ihren Beitrag zum Umweltschutz.
47

20. Technische Daten
Abmessungen
Durchmesser ohne Rotoren: ..................................... 650 mm
Gesamthöhe ausgeklappt: ........................................ 285 mm
Gewicht: ..................................................................... Ca. 1100 g inkl. Akku
Max. Abfluggewicht: .................................................. 2000 g (darf nicht überschritten werden!)
Elektrische Daten
Versorgungsspannung: ............................................. 9 - 12 V (3 Zellen LiPo-Akku)
Empfohlener Flugakku: ............................................. LiPo, 3 Zellen, 2500 mAh, 25C
Erforderliche Fernsteueranlage: ............................... 6 Kanäle
Leistungsdaten
Durchschnittliche Stromaufnahme pro Motor: .......... ca. 7 - 14 A
Max. Strom pro Motor: ............................................... ca. 19 A
Schub pro Motor: ....................................................... max. 900 g
Betriebsumgebung
Betriebsbereich: ........................................................ Innen- und Außenbereich (trocken, kein Niederschlag)
Wind bei Flugbetrieb: ................................................ Kein bis leichter Wind
Umgebungstemperatur: ............................................ +10 °C bis +40 °C
Luftfeuchtigkeit: ......................................................... max. 80%, nicht kondensierend
48

495051



Impressum
Diese Bedienungsanleitung ist eine Publikation der Conrad Electronic SE, Klaus-Conrad-Str. 1, D-92240 Hirschau
(www.conrad.com).
Alle Rechte einschließlich Übersetzung vorbehalten. Reproduktionen jeder Art, z. B. Fotokopie, Mikroverfilmung, oder die
Erfassung in elektronischen Datenverarbeitungsanlagen, bedürfen der schriftlichen Genehmigung des Herausgebers.
Nachdruck, auch auszugsweise, verboten.
Diese Bedienungsanleitung entspricht dem technischen Stand bei Drucklegung. Änderung in Technik und Ausstattung
vorbehalten.
© Copyright 2010 by Conrad Electronic SE.
V1_1110_01
 Loading...
Loading...