

Page 1
QuadroCopter „450“ ARF QC09
Best.-Nr. / Item No. / N° de commande / Bestelnr.: 23 98 80
Bedienungsanleitung Seite 2 - 42
Operating Instructions Page 43 - 83
Notice d’emploi Page 84 - 124
Gebruiksaanwijzing Pagina 125 - 165
¨
¨
Version 09/12
Page 2

1. Einführung ........................................................................................................................................................... 4
2. Bestimmungsgemäße Verwendung .................................................................................................................... 5
3. Symbol-Erklärung ................................................................................................................................................ 5
4. Produktbeschreibung .......................................................................................................................................... 6
5. Lieferumfang ........................................................................................................................................................ 7
6. Sicherheitshinweise ............................................................................................................................................. 8
7. Batterie- und Akkuhinweise ............................................................................................................................... 11
8. Endmontage des QuadroCopters ..................................................................................................................... 13
9. Überprüfung der Konfiguration .......................................................................................................................... 21
10. Vor jeder Inbetriebnahme .................................................................................................................................. 28
Inhaltsverzeichnis
a) Allgemein ....................................................................................................................................................... 8
b) Vor der Inbetriebnahme ................................................................................................................................ 9
c) Während des Betriebs .................................................................................................................................. 9
a) Sender ......................................................................................................................................................... 11
b) Flugakku ...................................................................................................................................................... 12
a) Montage der Ausleger ................................................................................................................................. 13
b) Montage der Landebeine ............................................................................................................................ 13
c) Montage der Rotoren .................................................................................................................................. 14
d) Summensignalwandler................................................................................................................................ 15
e) Anschluss an den Empfänger ..................................................................................................................... 16
f) Summensignal-Ausgang ............................................................................................................................. 17
g) LED-Statusanzeige ..................................................................................................................................... 18
h) Inbetriebnahme des Summensignalwandlers ............................................................................................ 19
i) Montage des Flugakkus .............................................................................................................................. 19
j) Montage von Antenne und oberer Abdeckhaube ....................................................................................... 20
a) Allgemein ..................................................................................................................................................... 21
b) Erkennen der Kanäle vom Sender (allgemein) .......................................................................................... 22
c) „Gas“ erlernen ............................................................................................................................................. 23
d) „Gier“ erlernen ............................................................................................................................................. 23
e) „Nick“ erlernen ............................................................................................................................................. 23
f) „Roll“ erlernen.............................................................................................................................................. 24
g) Schalter für „Agility-Mode“ erlernen ............................................................................................................ 24
h) Einstellung des Flugmodus ......................................................................................................................... 25
i) Konfiguration mit der PC-Software ............................................................................................................. 26
j) Anschlüsse und Signalelemente der Flight Control „QC 09“ ..................................................................... 27
k) Mögliche Fernsteuermodi .............................................................................................................................. 28
a) Überprüfen der Verschraubungen .............................................................................................................. 28
b) Überprüfen der beweglichen Teile .............................................................................................................. 28
c) Abgleich der Neutrallage ............................................................................................................................. 29
Seite
2
Page 3

Seite
11. Sicherheitseinrichtungen ................................................................................................................................... 30
a) Motorschutz ................................................................................................................................................. 30
b) Notlandung .................................................................................................................................................. 30
c) Unterspannungsüberwachung .................................................................................................................... 30
12. LED-Anzeigen ................................................................................................................................................... 31
13. Akustische Meldungen des Signalgebers......................................................................................................... 33
14. Informationen zum ersten Start .........................................................................................................................34
a) Allgemeines Steuerverhalten...................................................................................................................... 34
b) Starten der Motoren .................................................................................................................................... 34
c) Stoppen der Motoren .................................................................................................................................. 35
d) Schwebeflug ................................................................................................................................................35
e) Gier .............................................................................................................................................................. 35
f) Nick .............................................................................................................................................................. 36
g) Roll .............................................................................................................................................................. 36
15. Der erste Flug ....................................................................................................................................................37
16. Wartung, Pflege und Reparatur ........................................................................................................................ 39
a) Regelmäßige Reinigung ............................................................................................................................. 39
b) Austausch der Rotoren ............................................................................................................................... 39
c) Austausch eines Motors .............................................................................................................................. 39
d) Austausch eines Auslegers......................................................................................................................... 40
e) Austausch des kompletten Rahmens ......................................................................................................... 40
17. Entsorgung ........................................................................................................................................................ 41
a) Allgemein ..................................................................................................................................................... 41
b) Batterien und Akkus .................................................................................................................................... 41
18. Konformitätserklärung (DOC)............................................................................................................................ 41
19. Technische Daten .............................................................................................................................................. 42
3
Page 4

1. Einführung
Sehr geehrte Kundin, sehr geehrter Kunde,
wir bedanken uns für den Kauf dieses Produkts.
Dieses Produkt erfüllt die gesetzlichen, nationalen und europäischen Anforderungen.
Um diesen Zustand zu erhalten und einen gefahrlosen Betrieb sicherzustellen, müssen Sie als Anwender diese Bedienungsanleitung beachten!
Diese Bedienungsanleitung gehört zu diesem Produkt. Sie enthält wichtige Hinweise zur Inbetriebnahme und Handhabung. Achten Sie hierauf, auch wenn Sie dieses Produkt an Dritte weitergeben.
Heben Sie deshalb diese Bedienungsanleitung zum Nachlesen auf!
Alle enthaltenen Firmennamen und Produktbezeichnungen sind Warenzeichen der jeweiligen Inhaber. Alle Rechte
vorbehalten.
Bei technischen Fragen wenden Sie sich bitte an:
Tel.: 0180/5 31 21 11
Fax: 0180/5 31 21 10
E-Mail: Bitte verwenden Sie unser Formular im Internet: www.conrad.de, unter der Rubrik „Kontakt“.
Mo. bis Fr. 8.00-18.00 Uhr
www.conrad.at
www.business.conrad.at
Tel.: 0848/80 12 88
Fax: 0848/80 12 89
E-Mail: support@conrad.ch
Mo. bis Fr. 8.00-12.00, 13.00-17.00 Uhr
4
Page 5
2. Bestimmungsgemäße Verwendung
Der „QuadroCopter 450 ARF QC09“ ist ein modellhubschrauberähnliches Flugmodell, es ist ausschließlich für den
privaten Einsatz im Modellbaubereich und den damit verbundenen Betriebszeiten ausgelegt.
Für einen anderen Einsatz ist dieses System nicht geeignet. Eine andere Verwendung als zuvor beschrieben kann zur
Beschädigung des Produktes mit den damit verbundenen Gefahren wie z.B. Kurzschluss, Brand, elektrischer Schlag
etc. führen. Die Sicherheitshinweise sind unbedingt zu befolgen!
Das Produkt darf nicht feucht oder nass werden.
Das Produkt ist kein Spielzeug, es ist nicht für Kinder unter 14 Jahren geeignet.
Beachten Sie alle Sicherheitshinweise dieser Bedienungsanleitung. Diese enthalten wichtige Informationen zum Umgang mit dem Produkt.
Sie allein sind für den gefahrlosen Betrieb des Modells verantwortlich!
3. Symbol-Erklärung
Das Symbol mit dem Ausrufezeichen weist Sie auf besondere Gefahren bei Handhabung, Betrieb oder
Bedienung hin.
Das „Pfeil“-Symbol steht für spezielle Tipps und Bedienhinweise.
5
Page 6

4. Produktbeschreibung
Bei dem Elektroflugmodell „QuadroCopter 450 ARF QC09“ handelt es sich um ein weitestgehend vormontiertes Flugobjekt. Im professionellen Bereich werden solche Fluggeräte bereits für verschiedenste Aufgaben eingesetzt. Modernste mikroprozessorgesteuerte Elektronik mit Lageregelung und Beschleunigungssensoren stabilisieren den QuadroCopter.
Die wesentlichen Unterschiede zu dem Vorgängermodell „QuadroCopter 450“ (Conrad Best.-Nr. 208000) sind die
höherwertigeren Sensoren in MEMS-Technologie, ein „Agility-Mode“ und eine verbesserte Steuerungs- und Regelsoftware. Diese Änderungen ergeben in Summe deutlich bessere Flugeigenschaften und ermöglichen im „AgilityMode“ auch einfachen Kunstflug. Zu dem ist auch ein Summensignalwandler verbaut, der den Betrieb mit herkömmlichen Empfängern (z.B. von einer bereits vorhandenen Fernsteuerung) ermöglicht.
Auch wurde das Layout der Flight-Control-Platine (Hauptplatine QC09) komplett neu gestaltet, um für künftige Zusatzmodule entsprechende Schnittstellen und Anschlussmöglichkeiten zu schaffen. Statt Stiftleisten zur Mode-Einstellung wurden DIP-Schalter verbaut.
Hochwertige bürstenlose Gleichstrommotoren in Verbindung mit einer speziell entwickelten Ansteuerung ermöglichen
einen langen, kraftvollen Flugbetrieb und geben jede Menge Reserve für Nutzlasten wie z.B. Kameras etc. Durch die
neuartige Steuerung und die elektronische Selbststabilisierung ergeben sich hervorragende Flugeigenschaften. Verschiedene Flugprogramme sorgen dafür, dass sowohl Einsteiger als auch Profis sehr rasch ihre Freude haben.
Der QuadroCopter kann sowohl in Hallen als auch im Freien betrieben werden. Die eingebauten elektronischen
Regelungen können zwar kleinere unerwünschte Änderungen der Fluglage abfangen, jedoch nicht vollkommen unwirksam werden lassen. Da das Gewicht eines QuadroCopters relativ niedrig ist, reagiert dieser sensibel auf Wind.
Ideale Flugbedingungen sind daher völlige Windstille bis sehr leichter und gleichmäßiger Wind.
Der Designerrahmen in Leichtbauweise mit Aluminium-Auslegern ist stabil und ermöglicht hervorragende Flugeigenschaften. Der Rahmen ist klappbar und damit einfach und platzsparend zu transportieren. Der Designerrahmen
nimmt die komplette Elektronik auf und hat Platz für Erweiterungsplatinen. Durch die Gitterbauweise ergeben sich bei
geringem Gewicht eine hohe Festigkeit und ein guter Schutz für die Elektronik.
Das Modell ist aufgrund seiner Auslegung für den erfahrenen Modellhubschrauberpiloten konzipiert, der mit dem
QuadroCopter nicht nur hubschauberähnliche, sondern auch Aufsehen erregende Flüge absolvieren will.
Das extrem wendige Modell ist aber auch für Modellflugeinsteiger geeignet. Für Einsteiger empfehlen wir jedoch vor
dem ersten Flug ein entsprechendes Training an einem Flugsimulator für Helikopter bzw. die aktive Hilfe eines erfahrenen Modellhelikopterpiloten.
Das Modell bietet die Möglichkeit von Erweiterungen mittels zusätzlicher Elektronik (Erweiterungs-Schnittstelle auf
der Steuereinheit vorhanden) und den Anbau von diversen Mechaniken an das Modell.
6
Page 7
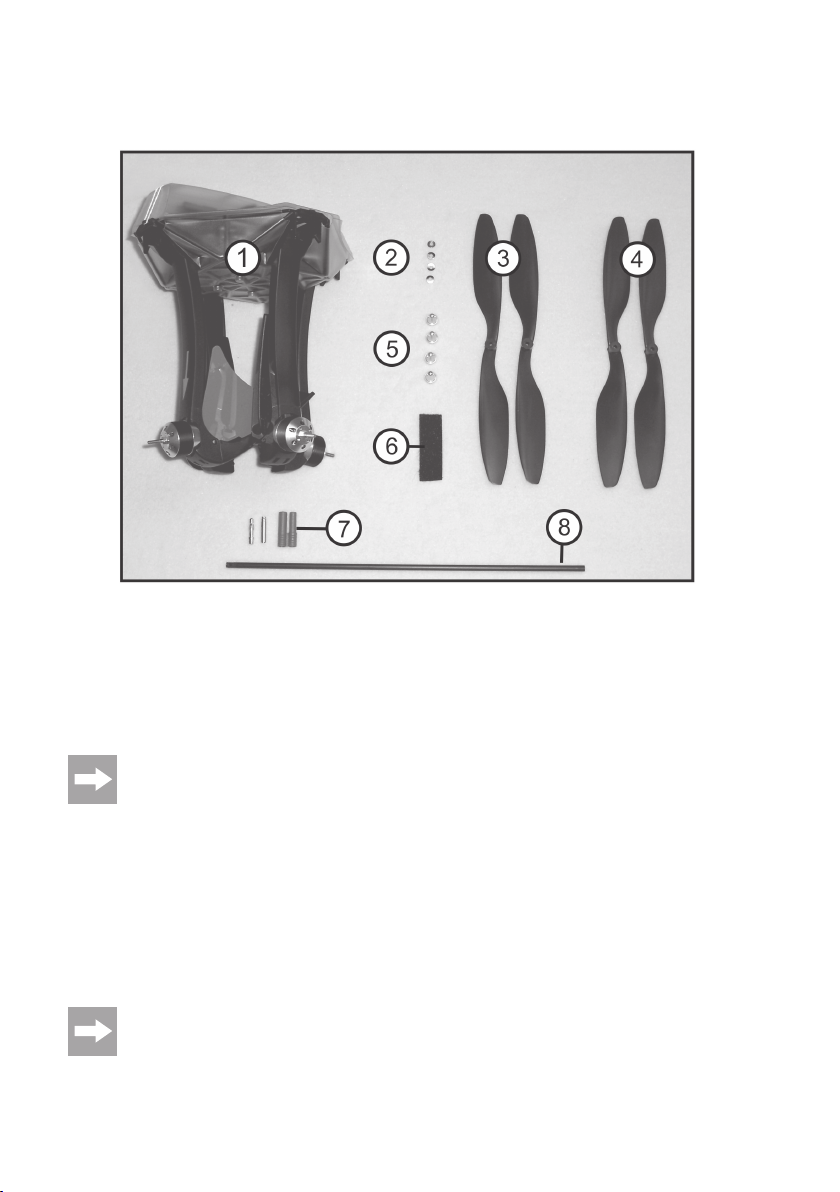
5. Lieferumfang
Bild 1
1) Vormontierter QuadroCopter
2) Vier Federscheiben M3
3) Zwei Propeller linksdrehend
4) Zwei Propeller rechtsdrehend
5) Vier Rotorspitzen
6) Klettband
7) Steckverbinder für Akku
8) Antennenrohr
Ohne Abb.: Bedienungsanleitung
Eine Ersatzteilliste finden Sie auf unserer Internetseite www.conrad.com im Download-Bereich zum jeweiligen Produkt. Alternativ können Sie die Ersatzteilliste auch telefonisch anfordern. Die Kontaktdaten finden Sie am Anfang dieser Bedienungsanleitung im Kapitel “Einführung“.
Für den Aufbau und den Betrieb sind noch folgende Komponenten erforderlich, die nicht im Lieferumfang des Flugmodells beinhaltet sind:
Aufbau:
Lötkolben und das dazu erforderliche Zubehör.
Betrieb:
Zum Betrieb des Modells ist eine einfache 5-Kanal-Fernsteueranlage, ein 3-zelliger LiPo-Flugakku mit ca. 2500 mAh
und einer Entladerate von 25 C sowie ein passendes LiPo-Ladegerät mit LiPo-Balancer erforderlich.
Praxiserprobtes passendes Zubehör finden Sie in dem eigens für den Einsteiger zusammengestellten
„QuadroCopter Ergänzungsset“, in unseren Katalogen oder unter www.conrad.com.
7
Page 8
6. Sicherheitshinweise
Bei Schäden, die durch Nichtbeachtung dieser Bedienungsanleitung verursacht werden, erlischt
die Gewährleistung/Garantie. Für Folgeschäden übernehmen wir keine Haftung!
Bei Sach- oder Personenschäden, die durch unsachgemäße Handhabung oder Nichtbeachten
der Sicherheitshinweise verursacht werden, übernehmen wir keine Haftung! In solchen Fällen
erlischt die Gewährleistung/Garantie.
Von der Gewährleistung und Garantie ausgeschlossen sind ferner normaler Verschleiß und Unfall- bzw.
Absturzschäden (z.B. gebrochene Rotorblätter oder Chassisteile).
Sehr geehrte Kundin, sehr geehrter Kunde, diese Sicherheitshinweise dienen nicht nur zum Schutz des
Produkts, sondern auch zu Ihrer eigenen Sicherheit und der anderer Personen. Lesen Sie sich deshalb
dieses Kapitel sehr aufmerksam durch, bevor Sie das Produkt in Betrieb nehmen!
a) Allgemein
Achtung, wichtiger Hinweis!
Beim Betrieb des Modells kann es zu Sach- und/oder Personenschäden kommen. Achten Sie deshalb
unbedingt darauf, dass Sie für den Betrieb des Modells ausreichend versichert sind, z.B. über eine Haftpflichtversicherung. Falls Sie bereits eine Haftpflichtversicherung besitzen, so informieren Sie sich vor
Inbetriebnahme des Modells bei Ihrer Versicherung, ob der Betrieb des Modells mitversichert ist.
Beachten Sie: In verschiedenen Ländern der EU besteht eine Versicherungspflicht für alle Flugmodelle!
• Aus Sicherheits- und Zulassungsgründen (CE) ist das eigenmächtige Umbauen und/oder das Verändern des Pro-
dukts oder deren Komponenten nicht gestattet.
• Das Produkt ist kein Spielzeug, es ist nicht für Kinder unter 14 Jahren geeignet.
• Das Produkt darf nicht feucht oder nass werden. Da im QuadroCopter empfindliche Steuerelektronik verwendet
wird, die auch auf Temperaturschwankungen reagiert und für einen bestimmten Temperaturbereich optimiert ist, ist
ein Betrieb unter +10 °C zu vermeiden.
Das Produkt wurde für einen Betrieb bei einer Umgebungstemperatur zwischen +10 °C und +40 °C und einer in
Mitteleuropa normalen Luftfeuchtigkeit bei trockenem Wetter entwickelt. Bei einem Betrieb außerhalb dieser genannten Bedingungen kann es zu veränderten (Material-) Eigenschaften und daraus resultierend auch zu Beschädigungen des Produkts kommen!
• Sollten Sie noch nicht über ausreichende Kenntnisse zum Fliegen von ferngesteuerten Hubschraubern verfügen,
so wenden Sie sich bitte an einen erfahrenen Modellsportler oder an einen Modellbau-Club. Alternativ sollten Sie an
einem geeigneten Flugsimulator die ersten Flugerfahrungen sammeln.
• Lassen Sie das Verpackungsmaterial nicht achtlos liegen, dieses könnte für Kinder zum gefährlichen Spielzeug
werden.
• Ein max. Abfluggewicht von 1000 g sollte nicht überschritten werden. Bei einem höheren Abfluggewicht können die
Rotoren im Betrieb beschädigt werden und so einen Absturz verursachen!
• Sollten sich Fragen ergeben, die nicht mit Hilfe der Bedienungsanleitung abgeklärt werden können, so setzen Sie
sich bitte mit uns (Kontaktinformationen siehe Kapitel 1) oder einem anderen Fachmann in Verbindung.
8
Page 9

b) Vor der Inbetriebnahme
• Stellen Sie sicher, dass innerhalb der Reichweite der Fernsteuerung keine weiteren Modelle auf dem gleichen
Fernsteuerkanal (Sendefrequenz bei 35 bzw. 40 MHz-Fernsteuerungen) betrieben werden. Bei Fernsteuerungen
im 2,4 GHz-Band müssen Sie prüfen, ob Ihre Fernsteuerung ohne Störungen mit anderen Fernsteuerungen im
gleichen Frequenzband (2,4 GHz) gleichzeitig betrieben werden kann. Sie verlieren sonst die Kontrolle über die
ferngesteuerten Modelle!
• Rollen Sie den Antennendraht des Empfängers im Modell auf seine komplette Länge ab. Verlegen Sie die Antenne
in der Art, dass sich der Antennendraht unter keinen Umständen in drehenden Teilen verfangen kann. Der Antennendraht sollte in das Antennenrohr eingeschoben und die überschüssige Länge (z.B. bei 35 bzw. 40 MHzFernsteuerungen) lose aufgerollt mit einem transparenten Klebestreifen am Antennenröhrchen fixiert werden. Schneiden Sie unter keinen Umständen den Antennendraht ab, da sonst die Reichweite der Funkfernsteuerung massiv
verkürzt wird. Orientieren Sie sich hierzu auch gemäß den Vorschriften des Fernsteuerherstellers.
• Überprüfen Sie regelmäßig die Funktionssicherheit Ihres Modells und der Fernsteueranlage. Achten Sie dabei auf
sichtbare Beschädigungen, wie z.B. defekte Steckverbindungen oder beschädigte Kabel.
• Sämtliche beweglichen Teile am Modell müssen leichtgängig funktionieren, dürfen jedoch kein Spiel in der Lage-
rung aufweisen.
• Überprüfen Sie vor jeder Inbetriebnahme den korrekten und festen Sitz der Rotoren.
• Der zum Betrieb erforderliche Flugakku sowie eventuell im Fernsteuersender eingesetzte Akkus sind entsprechend
den Herstellerangaben aufzuladen.
• Werden zur Stromversorgung des Senders Batterien genutzt, achten Sie auf eine noch ausreichende Restkapazität
(Batterieprüfer). Sollten die Batterien leer sein, so tauschen Sie immer den kompletten Satz und niemals nur einzelne Zellen aus.
• Ziehen Sie für den Betrieb Ihres Modells die Teleskopantenne (bei 35 bzw. 40 MHz-Fernsteuerungen) am Sender
immer auf die komplette Länge aus, da der Sender sonst eine wesentlich geringere Reichweite aufweist und die
Sendeendstufe überdurchschnittlich stark belastet wird.
• Schalten Sie immer zuerst den Sender ein. Achten Sie darauf, dass beim Einschalten des Senders der Gashebel
auf niedrigster Stellung (Motoren aus) eingestellt ist! Erst danach darf der Flugakku des Modells angeschlossen
werden. Andernfalls kann es zu unvorhersehbaren Reaktionen des Modells kommen und die Rotoren können ungewollt anlaufen! Verletzungsgefahr!
• Achten Sie bei laufenden Rotoren darauf, dass sich weder Gegenstände noch Körperteile im Dreh- und Ansaug-
bereich der Rotoren befinden.
c) Während des Betriebs
• Gehen Sie bei Betrieb des Modells kein Risiko ein! Ihre eigene Sicherheit und die Ihres Umfeldes hängen alleine
von Ihrem verantwortungsbewussten Umgang mit dem Modell ab.
• Der unsachgemäße Betrieb kann schwerwiegende Personen- und Sachschäden verursachen! Achten Sie deshalb
beim Flugbetrieb auf einen ausreichenden Sicherheitsabstand zu Personen, Tieren und Gegenständen.
• Wählen Sie ein geeignetes Gelände zum Betrieb Ihres Modells aus.
• Fliegen Sie mit Ihrem Modell nur dann, wenn Ihre Reaktionsfähigkeit uneingeschränkt gegeben ist. Müdigkeit, Alko-
hol- oder Medikamenten-Einfluss können zu Fehlreaktionen führen.
9
Page 10

• Fliegen Sie nie direkt auf Zuschauer oder auf sich selbst zu.
• Sowohl Motor, Flugregler als auch Flugakku können sich beim Betrieb des Modells erwärmen. Machen Sie aus
diesem Grund spätestens nach 20 Minuten Flugdauer eine Pause von 10 - 15 Minuten, bevor Sie den Flugakku
wieder laden bzw. mit einem eventuell vorhandenen Ersatzflugakku erneut starten. Die Antriebsmotoren müssen
auf Umgebungstemperatur abgekühlt sein.
• Lassen Sie immer die Fernsteuerung (Sender) eingeschaltet, solange das Modell in Betrieb ist. Stecken Sie nach
der Landung immer zuerst den Flugakku ab, bzw. schalten Sie das Modell aus. Erst danach darf der Fernsteuersender ausgeschaltet werden.
• Bei einem Defekt oder einer Fehlfunktion ist zuerst die Ursache der Störung zu beseitigen, bevor Sie Ihr Modell
wieder starten.
• Setzen Sie Ihr Modell und die Fernsteueranlage nicht über längere Zeit der direkten Sonneneinstrahlung oder
großer Hitze aus.
• Bei einem schweren Absturz (zum Beispiel aus großer Höhe) können die elektronischen Gyro-Sensoren beschädigt
bzw. verstimmt werden. Vor einem erneuten Flug ist daher unbedingt die volle Funktion zu prüfen! Wir empfehlen
zudem einen Abgleich der Neutrallage.
• Bei einem Absturz ist das Gas sofort auf null zu reduzieren. Drehende Rotoren können bei Kontakt mit Hindernissen
bzw. beim Aufschlag beschädigt werden. Vor einem erneuten Flug sind diese unbedingt auf eventuelle Risse oder
Bruchstellen zu prüfen!
• Um Schäden am QuadroCopter durch Absturz wegen Unterspannung bzw. am Akku durch Tiefentladung zu ver-
meiden, empfehlen wir, im Flug die Leuchtsignale zur Unterspannung unbedingt zu beachten. Da die eingebauten
LEDs nur in eine Richtung abstrahlen, empfehlen wir den zusätzlichen Einbau des LiPo-Saver (Conrad Best.-Nr.
230327). Der LiPo-Saver zeigt Ihnen per Lichtsignal eine drohende Unterspannung an. Platzieren Sie den LiPoSaver an geeigneter Stelle im QuadroCopter.
10
Page 11
7. Batterie- und Akkuhinweise
Obwohl der Umgang mit Batterien und Akkus im täglichen Leben heute eine Selbstverständlichkeit ist,
bestehen zahlreiche Gefahren und Probleme. Speziell bei LiPo-/LiIon-Akkus mit ihrem hohen Energieinhalt (im Vergleich zu herkömmlichen NiCd- oder NiMH-Akkus) sind diverse Vorschriften unbedingt einzuhalten, da andernfalls Brand- und Explosionsgefahr besteht.
Der QuadroCopter wird ohne Akkus und ohne Ladegerät geliefert. Trotzdem möchten wir Ihnen aus Sicherheitsgründen zum Umgang mit Batterien und Akkus umfangreiche Informationen geben. Bei eigenem
Zubehör beachten Sie auch alle beiliegenden Informationen des Herstellers.
a) Sender
• Batterien/Akkus gehören nicht in Kinderhände.
• Lassen Sie Batterien/Akkus nicht offen herumliegen, es besteht die Gefahr, dass diese von Kindern oder Haustieren
verschluckt werden. Suchen Sie in einem solchen Fall sofort einen Arzt auf!
• Batterien/Akkus dürfen niemals kurzgeschlossen, zerlegt oder ins Feuer geworfen werden. Es besteht Explosions-
gefahr!
• Ausgelaufene oder beschädigte Batterien/Akkus können bei Berührung mit der Haut Verätzungen verursachen,
benutzen Sie deshalb in diesem Fall geeignete Schutzhandschuhe.
• Herkömmliche Batterien dürfen nicht aufgeladen werden. Es besteht Brand- und Explosionsgefahr! Laden Sie aus-
schließlich dafür vorgesehene Akkus; verwenden Sie dazu geeignete Akkuladegeräte.
• Bei längerem Nichtgebrauch (z.B. bei Lagerung) entnehmen Sie die in der Fernsteuerung eingelegten Batterien
(bzw. Akkus), um Schäden durch auslaufende Batterien/Akkus zu vermeiden.
• Laden Sie NiMH- bzw. NiCd-Akkus etwa alle 3 Monate nach, da es andernfalls durch die Selbstentladung zu einer
sog. Tiefentladung kommen kann, wodurch die Akkus unbrauchbar werden können.
• Wechseln Sie immer den ganzen Satz Batterien bzw. Akkus aus. Mischen Sie nicht volle mit halbvollen Batterien/
Akkus. Verwenden Sie immer Batterien bzw. Akkus des gleichen Typs und Herstellers.
• Mischen Sie niemals Batterien mit Akkus!
11
Page 12

b) Flugakku
Achtung!
Nach dem Flug ist der LiPo-Flugakku von der Elektronik des QuadroCopters zu trennen. Lassen Sie den
LiPo-Flugakku nicht an der Elektronik angesteckt, wenn Sie diesen nicht benutzen (z.B. bei Transport
oder Lagerung). Andernfalls kann der LiPo-Flugakku tiefentladen werden. Dadurch wird er zerstört und
unbrauchbar! Zudem besteht die Gefahr von Fehlfunktionen durch Störimpulse. Die Rotoren könnten
ungewollt anlaufen und Schäden oder Verletzungen verursachen.
• Laden Sie den LiPo-Flugakku niemals unmittelbar nach dem Gebrauch. Lassen Sie den LiPo-Flugakku immer erst
abkühlen (mindestens 10 - 15 Minuten).
• Verwenden Sie zum Laden von LiPo-Akkus ein geeignetes LiPo-Ladegerät sowie einen LiPo-Equalizer/-Balancer.
• Laden Sie nur intakte und unbeschädigte Akkus. Sollte die äußere Isolierung des Akkus beschädigt sein bzw. der
Akku verformt bzw. aufgebläht sein, darf er auf keinen Fall aufgeladen werden. In diesem Fall besteht akute Brandund Explosionsgefahr!
• Beschädigen Sie niemals die Außenhülle des LiPo-Flugakkus. Zerschneiden Sie die Folienumhüllung nicht. Ste-
chen Sie nicht mit scharfen Gegenständen in den LiPo-Flugakku. Es besteht Brand- und Explosionsgefahr!
• Entnehmen Sie den LiPo-Flugakku zum Laden aus dem Modell und legen Sie ihn auf einen feuerfesten Untergrund
(z.B. Steinfliese). Halten Sie ausreichend Abstand zu brennbaren Gegenständen.
• Da sich sowohl das Ladegerät als auch der LiPo-Flugakku während des Ladevorgangs erwärmen, ist es erforder-
lich, auf eine ausreichende Belüftung zu achten. Decken Sie das Ladegerät und den LiPo-Flugakku niemals ab!
• Laden Sie LiPo-Akkus niemals unbeaufsichtigt.
• Trennen Sie den LiPo-Flugakku vom Ladegerät, wenn dieser vollständig aufgeladen ist.
• Ladegeräte dürfen nur in trockenen, geschlossenen Innenräumen betrieben werden. Ladegeräte und LiPo-Flug-
akku dürfen nicht feucht oder nass werden.
Bei Ladegeräten, die über die Netzspannung betrieben werden, besteht in diesem Fall Lebensgefahr
durch einen elektrischen Schlag! Außerdem besteht Brand- und Explosionsgefahr durch den Akku. Gerade LiPo-Akkus sind durch die darin enthaltenen Chemikalien sehr feuchtigkeitsempfindlich! Setzen Sie
das Ladegerät und den LiPo-Flugakku keinen hohen/niedrigen Temperaturen sowie direkter Sonneneinstrahlung aus. Beachten Sie beim Umgang mit LiPo-Akkus die speziellen Sicherheitshinweise des Akkuherstellers!
12
Page 13
8. Endmontage des QuadroCopters
a) Montage der Ausleger
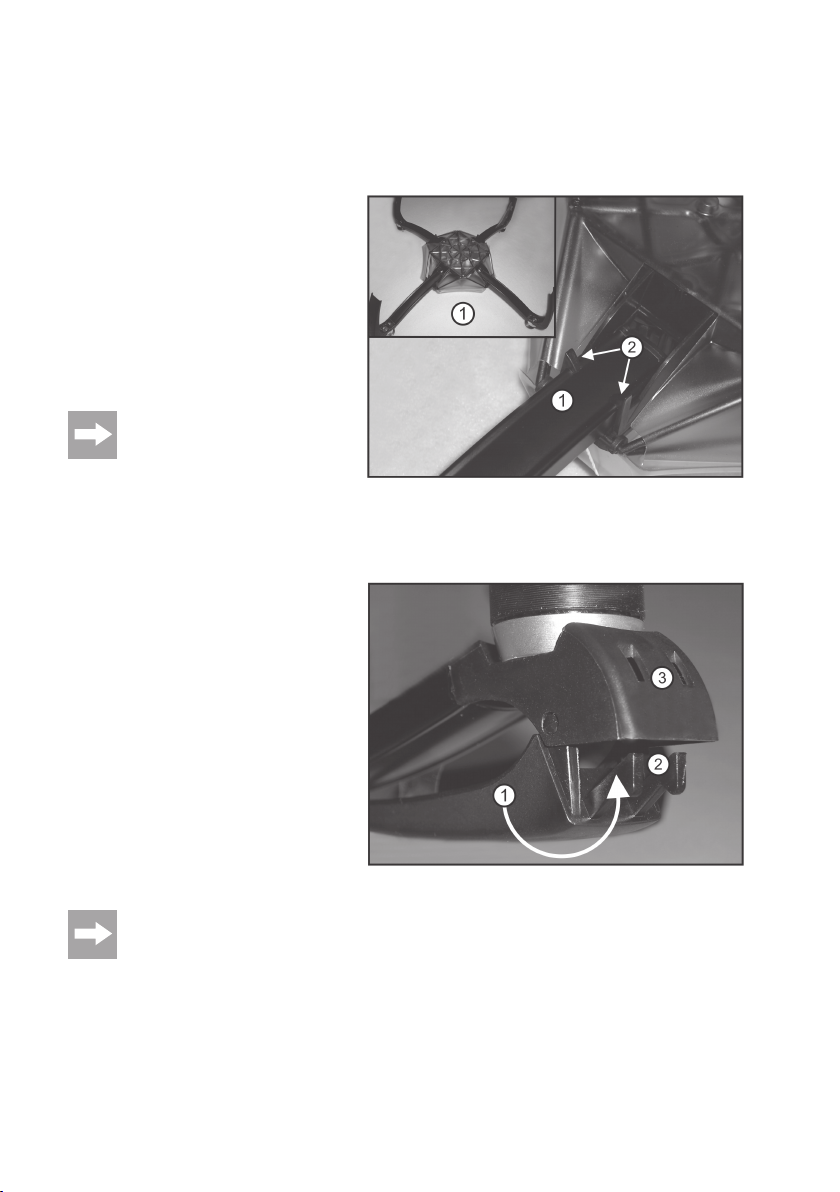
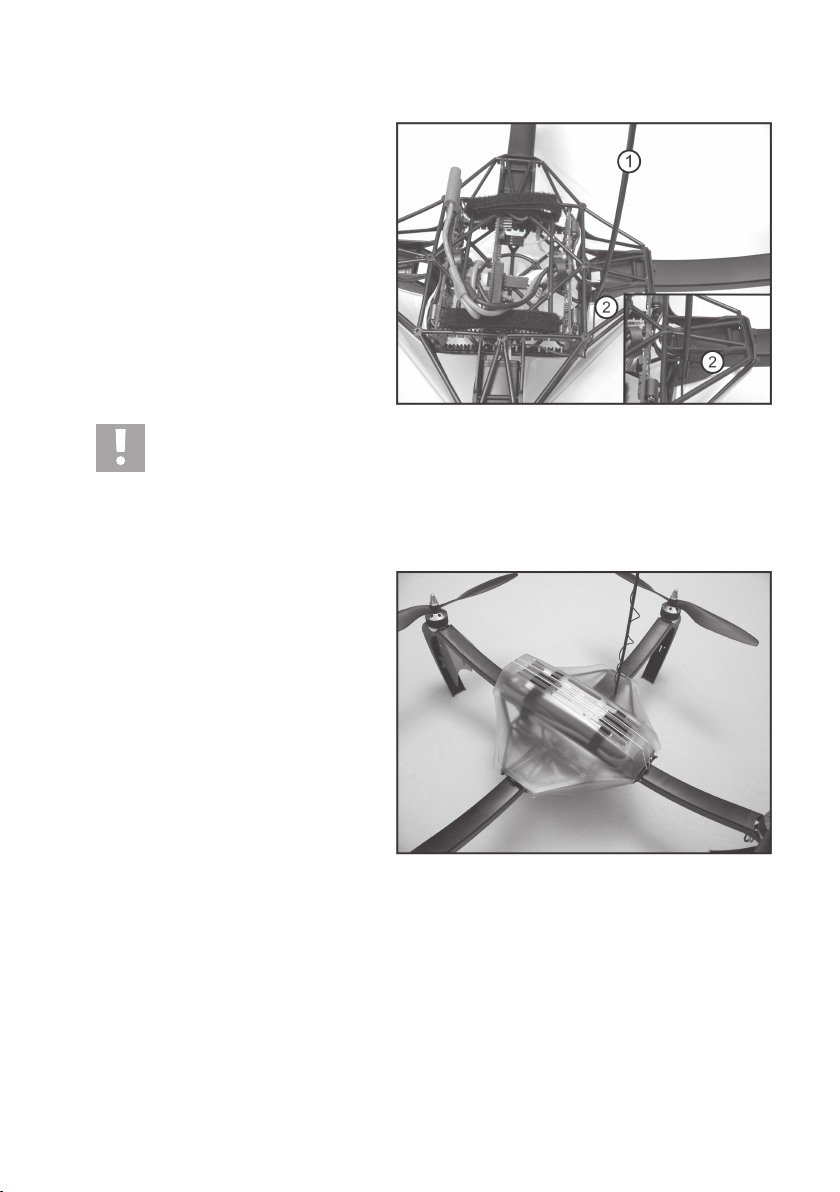
Das Modell wird in zusammengeklapptem Zustand
geliefert. Klappen Sie als Erstes die vier Ausleger
(1) in ihre Flugposition. Dazu drücken Sie die Klammern am Zentralrahmen (2) etwas auseinander und
klappen den Ausleger nach oben (deutliches Einrasten spürbar).
Wollen Sie zum Transport die Ausleger wieder einklappen, sollten Sie die Klammern am Zentralrahmen etwas auseinander drücken, um ein Abbrechen zu vermeiden.
Wollen Sie die Ausleger für einen
Transport nicht mehr einklappen, so
können Sie diese mit einem Tropfen
Sekundenkleber oder mit Kabelbindern
auch dauerhaft fixieren.
Bild 2
b) Montage der Landebeine
Klappen Sie die Landebeine (1) in die Flugposition.
Es muss ein deutliches Einrasten der Halteklammern (2) in den Schlitzen (3) spürbar sein.
Für ein Einklappen sollten Sie mit einem kleinen
Schraubenzieher die Halteklammern (2) in den
Schlitzen (3) etwas eindrücken, um ein Brechen
der Plastikteile zu vermeiden.
An einem Landebein ist ein roter Richtungsanzeiger montiert. Dieser Richtungsanzeiger ist in Flugrichtung immer als „vorne“ zu betrachten.
Bild 3
Bei etwas härteren Landungen klappen die Landebeine ein. Das ist normal uns so gewünscht. Wollen Sie
diesen Effekt vermeiden bzw. wollen Sie die Landebeine für einen Transport nicht mehr einklappen, so
können Sie mit einem Tropfen Sekundenkleber die Beine auch dauerhaft fixieren.
13
Page 14
c) Montage der Rotoren
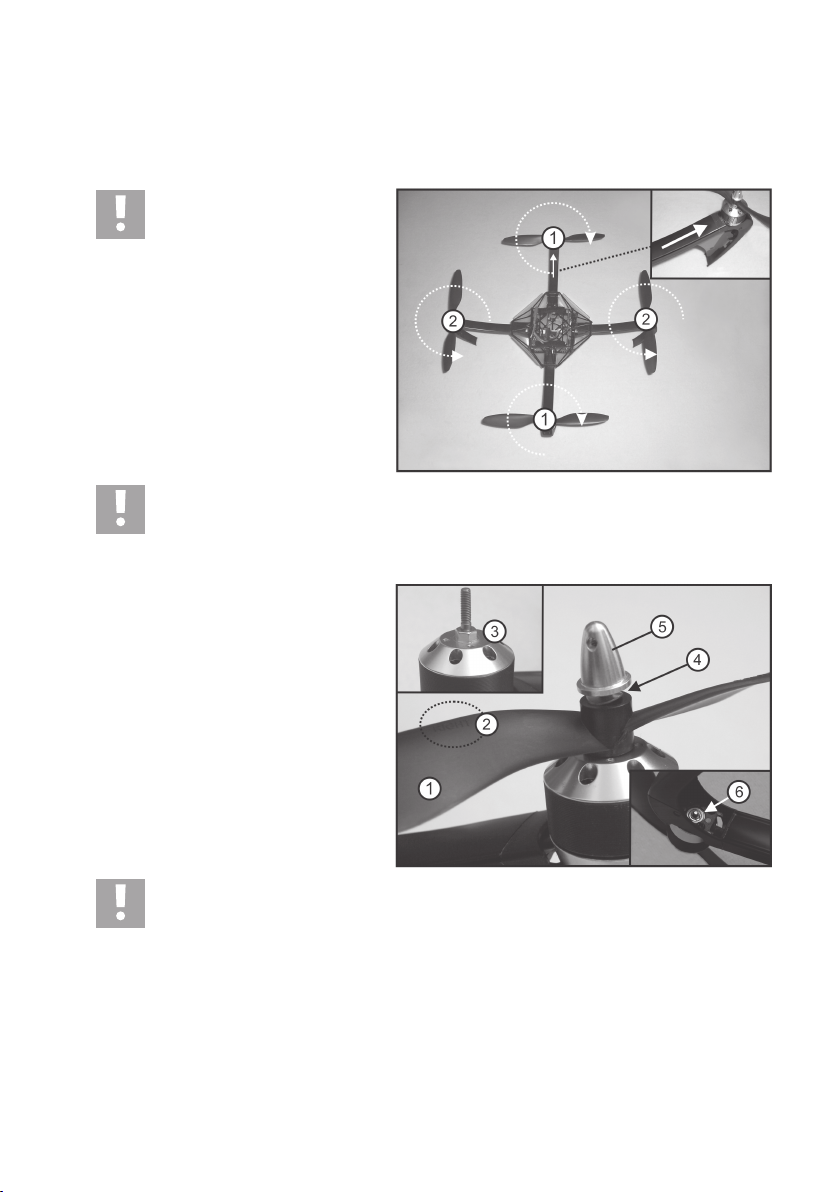
Die Drehrichtung der Rotoren kann aus Bild 4 (Ansicht von oben) entnommen werden. Dabei ist die Lage des roten
Richtungsanzeigers im Landebein und der Pfeil auf dem Ausleger als Anhaltspunkt für die Ausrichtung des Modells zu
verwenden und gilt als „vorne“.
Achtung!
Da die Motoren bereits vormontiert
sind, gilt es an Hand der Flugrichtung
die Drehrichtung der Rotoren genau zu
beachten (Bild 4)!
Die Rotoren in der Längsachse (1) drehen sich im Uhrzeigersinn (rechtslaufend) und müssen mit der Aufschrift
„Right“ beschriftet sein.
Die Rotoren in der Querachse (2) drehen sich gegen den Uhrzeigersinn
(linkslaufend) und müssen mit „Left“
beschriftet sein.
Achtung!
Wenn die Rotoren nicht wie aufgezeigt montiert werden, passen die programmierten Drehrichtungen nicht
mehr zu den Drehrichtungen der Rotoren. Der QuadroCopter ist somit nicht mehr flugfähig und nicht mehr
steuerbar!
Rotoren und Motorwellen sind mit einem Sechskant versehen (3).
Setzen Sie die Rotoren (1) auf den Motorwellen
(3) in der Art auf, dass sie in dem Sechskant einrasten.
Legen Sie nun die jeweils eine der mitgelieferten
Federscheiben (4) zwischen Rotor und Rotorspitze
(5) bei, da sich ansonsten die Rotoren im Flug lösen können.
Schrauben Sie mit der Hand die Rotorspitzen an
den Motorwellen fest.
Bild 4
14
Achtung!
Ein zu festes Anschrauben führt zu Beschädigungen der Motoren. Die Wellen können dabei reißen oder
aus den Lagern gezogen werden. Die Motoren laufen schwergängiger und das kann sich negativ auf die
Flugeigenschaften auswirken. Prüfen Sie deshalb nach dem Anschrauben der Rotoren, dass sich alle
Rotoren leicht drehen lassen. Der in Bild 5, Pos. 6 dargestellte Sprengring auf der Unterseite der Motoren
muss sich bewegen lassen und darf nicht klemmen.
Vergewissern Sie sich vor jedem Flug, dass die Rotoren fest auf den Motoren verschraubt sind. Bei Einsatz von Werkzeugen ist äußerste Vorsicht geboten.
Bild 5
Page 15
d) Summensignalwandler
Bei einem handelsüblichen Empfänger wird für jedes Servo ein eigenes Ansteuersignal erzeugt und am jeweiligen
Servo-Steckkontakt am Empfänger ausgegeben. Der Summensignalwandler fügt die einzelnen Servoimpulse wieder
zusammen und gibt sie als serielles Summensignal aus. Zur Summensignalbildung können bis zu 8 Kanäle verarbeitet werden.
Der Empfänger kann dabei vom Summensignalwandler mit 5 V/DC versorgt werden. Eine zusätzliche Spannungsversorgung ist bei der Verwendung im „QuadroCopter“ ist nicht erforderlich.
Der Fernsteuerempfänger wird an der Anschluss-Buchse „ST3“ des Summensignalwandlers „QC07“ angeschlossen.
Dafür liegt dem Summenwandler ein geeignetes Anschlusskabel bei.
Die Anschlussbuchse „ST3“ verfügt über 10 Kontakte, die von rechts nach links durchnummeriert sind. Links befindet
sich der Kontakt 10 und rechts der Kontakt 1.
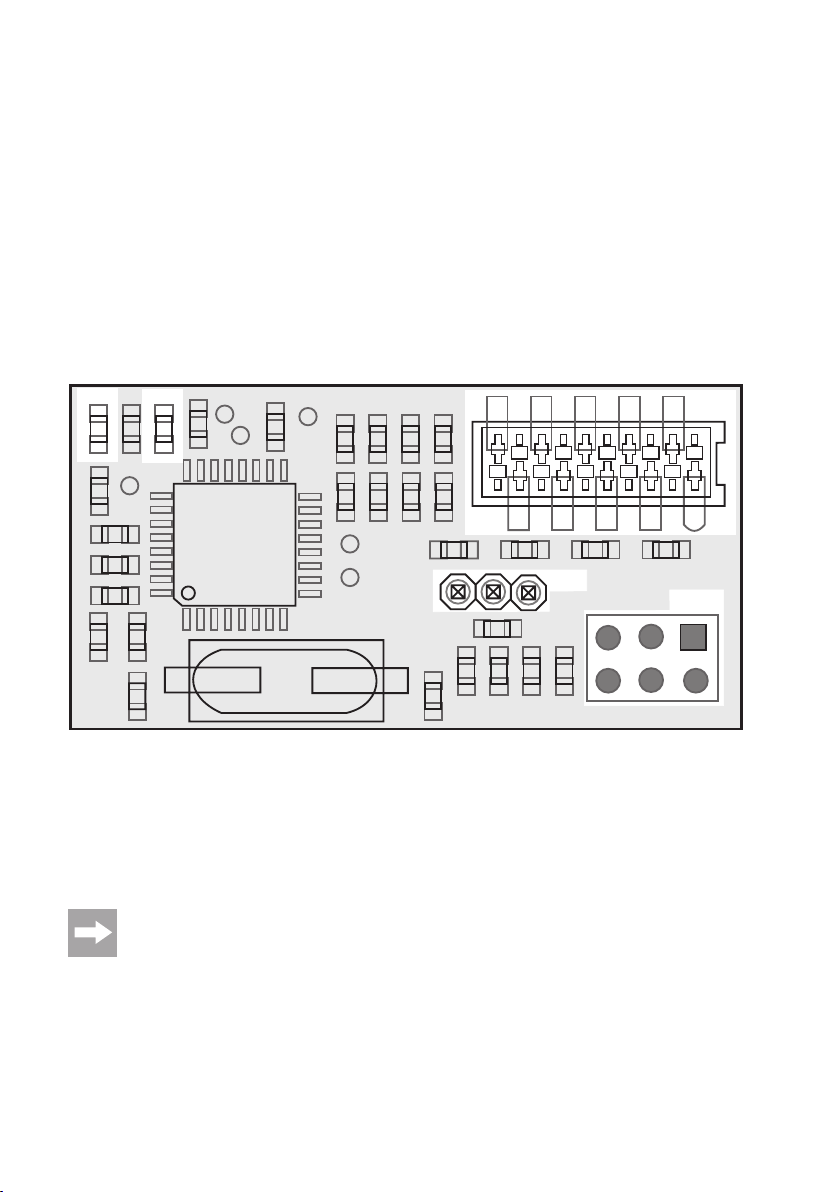
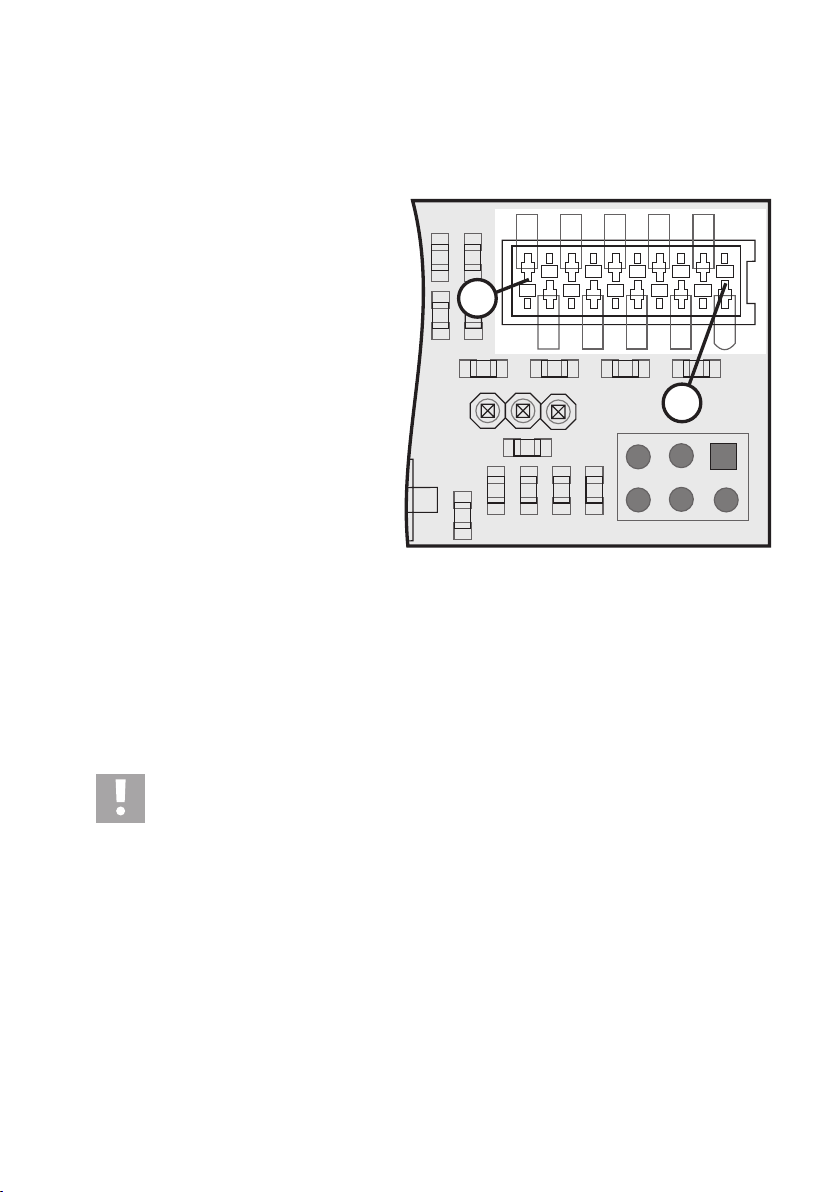
Der Summensignalwandler „QC07“ verfügt über folgende Anschlusskontakte:
C3
R17
U1
TP3
TP8
Q1
C7
TP7
R5
R1 R9 R13
R2 R10 R14
R6
TP2
TP1
C1
R3
R4
R7
R8
ST2
C6
R11 R15
ST3
R12
R16
ST1
5
6
1
2
LED2
C5
R20
R19
C4
C2
R18
R21
LED1
TP4
LED1: Grüne LED-Kontroll-Leuchte
LED2: Rote LED-Kontroll-Leuchte
ST3: Anschluss-Buchse für die Empfängerkabel
ST2: Anschluss-Kontakte für das Summensignal
ST1: Programmierstecker für produktionsbedingte Einstellungen
Eine genaue Beschreibung der einzelnen Kontakte und der Anschlussmöglichkeiten können Sie den folgenden Abschnitten entnehmen.
Bild 6
15
Page 16
e) Anschluss an den Empfänger
Stecken Sie das Anschlusskabel für den Empfängeranschluss in die Buchse „ST3“ des Summensignalwandlers. Die
Anschlussbuchsen 1 - 10 des Kabels sind für den Empfängeranschluss vorgesehen.
Die Kontakte des Anschlusskabels sind wie folgt belegt:
Kontakt 10 = Kanal 1
Kontakt 9 = Kanal 2
Kontakt 8 = Kanal 3
Kontakt 7 = Kanal 4
Kontakt 6 = Kanal 5
Kontakt 5 = Kanal 6
Kontakt 4 = Kanal 7
Kontakt 3 = Kanal 8
Kontakt 2 = GND/Minus (-)
Kontakt 1 = 5 V/Plus (+)
Die Signale der 8 Eingänge (Kanal 1 - 8) werden vom Summensignalwandler gemessen und verarbeitet. Dabei wird
aus allen verfügbaren Signalen ein Summensignal gemäß der Spezifikation für RC-Fernsteueranlagen (Pulsbreite
zwischen 1 ms und 2 ms) gebildet. Aufgrund der Messung der Signale und der Signalverarbeitung kommt es dabei zu
einer Zeitverzögerung von einer Framelänge. Dies wirkt sich allerdings im Betrieb nicht aus und ist deshalb lediglich
der Vollständigkeit halber erwähnt.
Die gemessenen Servosignale können in beliebiger Reihenfolge, parallel, hintereinander oder überlappend auftreten.
Dabei gibt es keinerlei Einschränkung und somit ist der Summensignalwandler für alle gängigen Systeme einsetzbar.
Ebenso ist keine Sync-Pause zwischen den einzelnen Signalen erforderlich.
Wichtig!
Achten Sie darauf, die Eingänge des Summensignalwandlers ohne Lücken zu belegen!
Bei einer 6-Kanal- Anlage müssen also die Eingänge 1-6 verwendet werden - und nicht beispielsweise die
Kanäle 1 - 4 und dann 6 - 7. Bei einer derartigen Belegung würde die Elektronik die Kanäle 6 und 7 nicht
erkennen!
R9 R13
10
R10 R14
C1
R3
R4
R7
R8
ST2
C6
R11 R15
ST3
R12
1
5
6
R16
ST1
1
2
Bild 7
16
Page 17
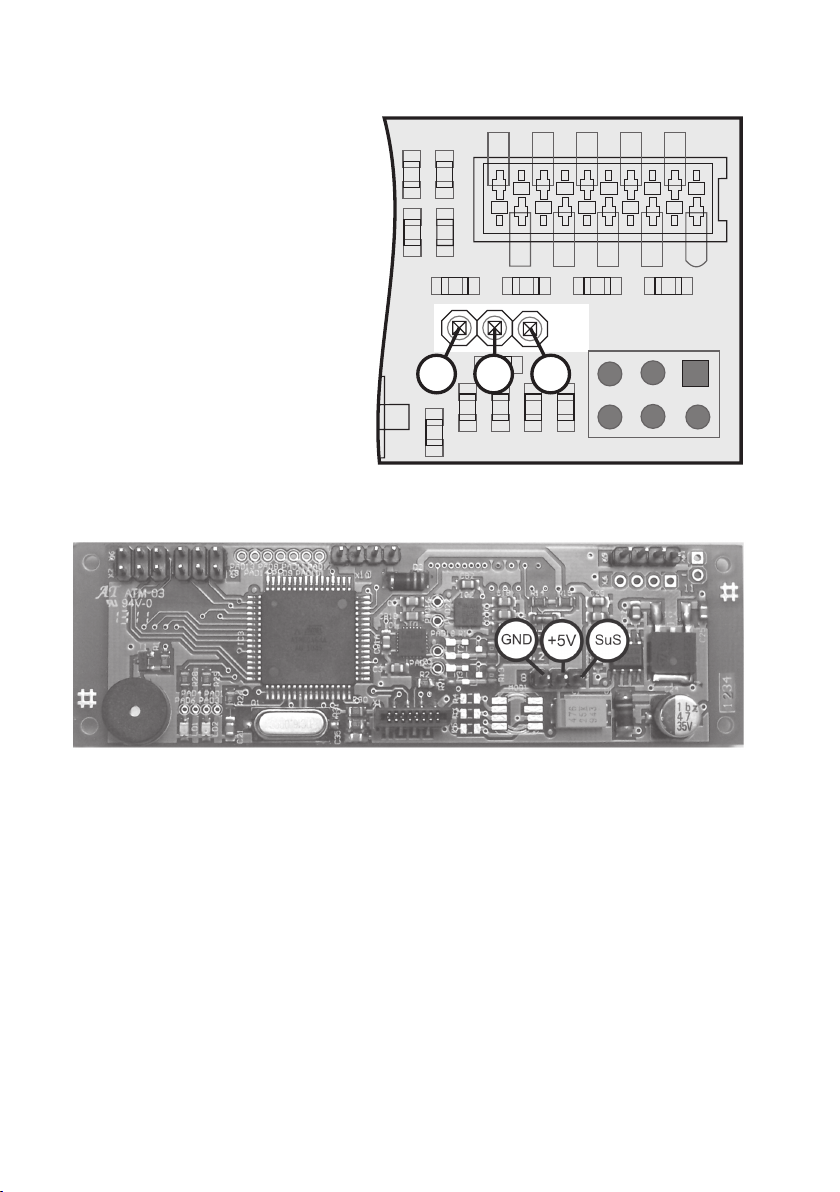
f) Summensignal-Ausgang
Der Summensignalwandler gibt das gebildete
Summensignal („SuS“) am linken Kontakt des Anschlusses „ST2“ aus.
Dieses Summensignal besteht aus so vielen Einzelsignalen wie an den Eingängen gemessen wurden.
Wird beispielsweise ein 6-Kanal-Empfänger verwendet, so hat das Summensignal ebenfalls 6
Kanäle. Die Erkennung der Kanalanzahl erfolgt
über die gültige Signalmessung an den Eingängen.
Schließen Sie das dreipolige Summensignalkabel
am Anschluss „ST2“ an (siehe Bild 8a). Die Impulsleitung (Markierung am Kabel) muss dabei mit dem
linken Kontakt des Steckers „ST2“ verbunden werden.
Die Anschlüsse „SuS“, „+5V“ und „GND“ sind mit
den entsprechenden Anschlüssen der Hauptplatine
(Bild 8b) im QuadroCopter zu verbinden. Achten
Sie auf die polungsrichtige Verbindung der beiden
Stiftleisten!
R9 R13
R10 R14
SuS
C1
R3
+5V
R7
R4
R8
ST2
C6
GND
R11 R15
ST3
R12
R16
ST1
5
6
1
2
Bild 8a
Bild 8b
17
Page 18
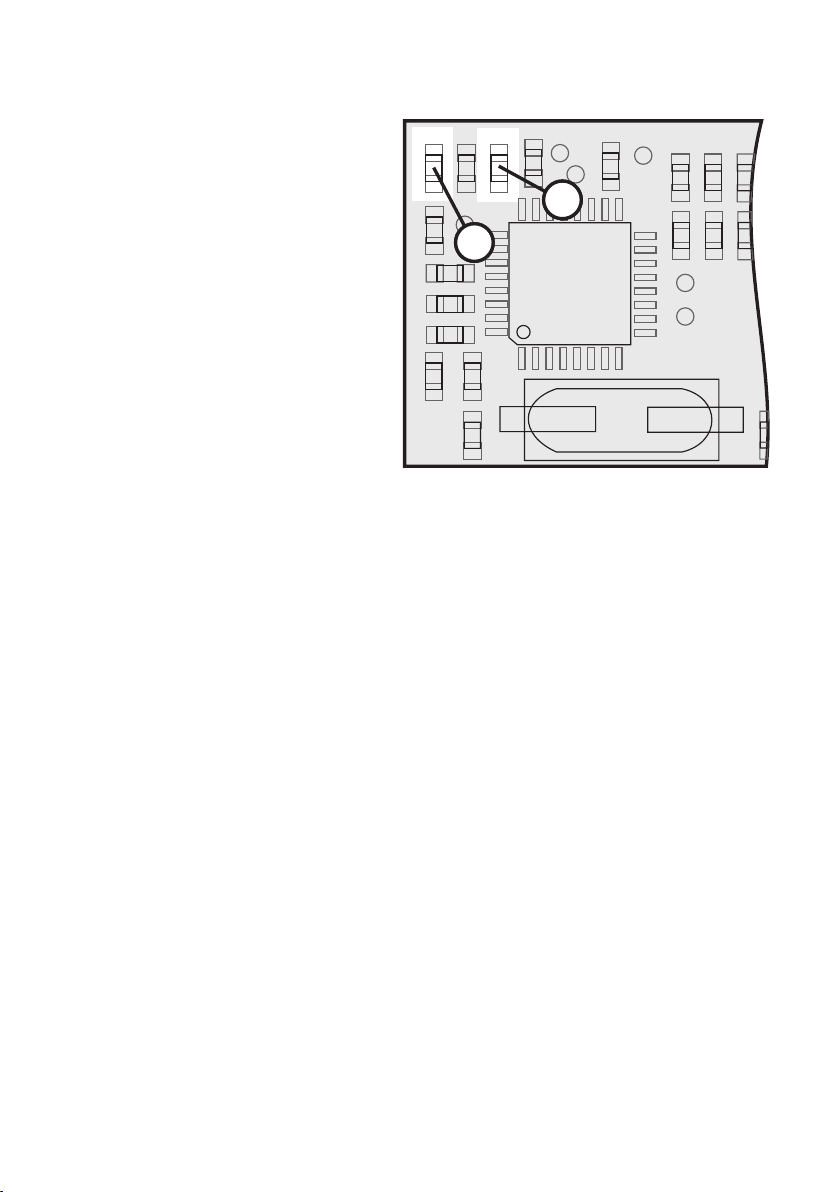
g) LED-Statusanzeige
Der Summensignalwandler verfügt über eine grüne und eine rote LED zur Statusanzeige.
LED2
LED1
Eine grün leuchtende LED („LED1“) zeigt an, dass
sich die Elektronik im normalen Betriebsmodus
befindet. Dies bedeutet, es können Servosignale
gemessen und gegebenenfalls ein Summensignal
erzeugt werden. Erlischt die grüne LED, liegt eine
C5
R18
R21
TP4
LED2
Rot
grundlegende Störung in der Elektronik vor.
Eine rot leuchtende LED („LED2“) zeigt an, dass
keine Servosignale vorhanden sind. Die Ursachen
hierfür können beispielsweise Empfangsstörungen,
R20
R19
fehlende Stromversorgung des Empfängers, ausgeschalteter Sender oder Kontaktfehler in den Anschlussleitungen sein.
C4
C2
Verhalten bei Empfangsstörungen
Der Summensignalwandler misst die Qualität der Signale und erkennt somit auch Empfangsstörungen. Da die Kanäle
1 - 4 überwiegend zur grundlegenden Steuerung von Modellen verwendet werden, liegt hierbei ein spezielles Augenmerk auf diesen Kanälen.
Störungen auf den Kanälen 1 - 4
Bei den Kanälen erfolgt eine Prüfung auf eine gültige Pulsbreite (zwischen 1 und 2 ms). Wird dabei ein Fehler erkannt,
so wird das Summensignal mit dem zuletzt gültigen Wert generiert. Übersteigt die Fehlerrate das Maß für einen
vernünftigen Empfang, so gibt der Summensignalwandler kein Summensignal mehr aus und aktiviert die rote LED.
Somit kann das Empfangsproblem von der nachgeschalteten Logik erkannt werden und es werden keine Empfangsprobleme verschleiert. Ist das Eingangssignal wieder gültig, so erlischt die rote LED wieder und es wird ein Summensignal erzeugt.
Störungen auf den Kanälen 5 - 8
Wirkt sich die Empfangsstörung nur auf die Kanäle 5 - 8 aus, so wird weiterhin ein Summensignal der Kanäle 1 - 4
erzeugt und die Kanäle 5 - 8 werden mit einer ungültigen Pulslänge ausgegeben. Dadurch ist weiterhin eine grundlegende Steuerung des Modells möglich, die Störung kann aber durch eine nachgeschaltete Logik an den Kanälen
5 - 8 erkannt werden. Ist das Eingangssignal wieder gültig, so wird ein reguläres Summensignal ausgegeben.
C3
R17
LED1
Rot
U1
TP3
TP8
Q1
C7
TP7
R5
R6
R1 R9
R2
TP2
TP1
R10
Bild 9
C
18
Page 19
h) Inbetriebnahme des Summensignalwandlers
Wenn Sie den Summensignalwandler mit dem Empfänger und dem Summensignalkabel des QuadroCopters verbunden haben, ist es erforderlich die Kanalbelegung der Fernsteuerung im QuadroCopter einzulernen. Die genaue Vorgehensweise können Sie dieser Bedienungsanleitung im Kapitel „Überprüfung der Konfiguration“ entnehmen.
i) Montage des Flugakkus
Der Flugakku gehört nicht zum Lieferumfang, sondern ist getrennt bestellbar.
Um den Flugakku zu montieren, gehen Sie folgendermaßen vor:
Löten Sie an die Anschlusskabel vom Akku das mitgelieferte, hochstromfähige Steckersystem (Bild 1, Pos. 7) an.
Achten Sie dabei unbedingt auf die richtige Polarität.
Das rote Kabel der Elektronik des QuadroCopters muss durch die Steckverbinder mit dem Pluskabel des Akkus
verbunden werden, das schwarze Kabel mit dem Minuskabel des Akkus.
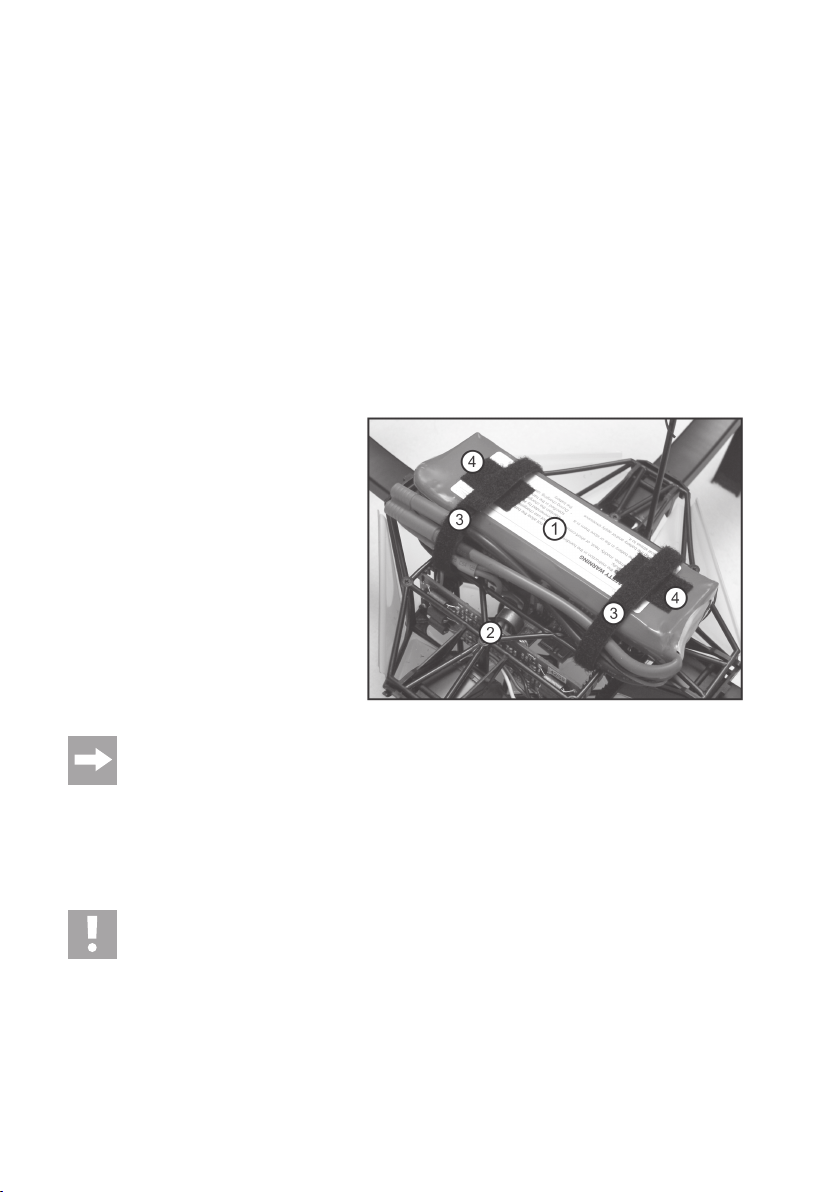
Montieren Sie den Akku (1) auf dem Gitterrahmen
(2) und befestigen Sie ihn mit den Klettbändern (3).
Kleben Sie zusätzlich zum gezeigten Klettband auf
die Oberseite des Akkus jeweils einen Streifen
Klettband (4; siehe auch Bild 1, Pos. 6), um auch
das Verrutschen nach vorne oder hinten wirksam
zu verhindern.
Die Anschlusskabel können wie im Bild gezeigt
auch unter den Klettbändern (3) befestigt werden.
Bild 10
Der Akku muss mittig aufgesetzt werden, so dass der QuadroCopter nicht heck-, kopf- oder seitenlastig
ist.
Die Elektronik des QuadroCopters besitzt eine Sicherheitseinrichtung gegen versehentliches Anlaufen des Motors.
Wenn der Kontakt zum Akku hergestellt wird, obwohl der Sender nicht eingeschaltet ist oder der Steuerknüppel für
Drehzahl/Pitch nicht auf Null gezogen wurde, gibt die Steuerelektronik im Modell keinen Anlaufbefehl an die Motoren.
Erst wenn der Sender eingeschaltet wird und der Steuerknüppel für Drehzahl/Pitch einmal auf Null gezogen wird, gibt
die Steuerelektronik den normalen Betriebszustand frei.
Achtung!
Um beim Ausfall der Sicherheitseinrichtung ein versehentliches Anlaufen des Motors zu verhindern, sollte
der Sender eingeschaltet sein. Der Steuerknüppel für Drehzahl/Pitch muss auf Null gezogen sein, so dass
kein Befehl zum Gasgeben ausgesendet wird.
19
Page 20
j) Montage von Antenne und oberer Abdeckhaube
Rollen Sie das Antennenkabel des eingebauten
Empfängers komplett aus und führen Sie dieses
durch das mitgelieferte Antennenrohr (1).
Stecken Sie danach das Antennenrohr von oben
in die vorgesehene Halterung (2). Drücken Sie das
Antennenrohr nicht von der Seite in die Halterung,
diese könnte sonst zerbrechen!
Sie können bei 35 bzw. 40 MHz-Empfängern das
überhängende Kabel dann an der Außenseite des
Antennenrohrs lose entlang wickeln und am Ende
mit Klebeband befestigen. Achten Sie auch darauf, dass das Antennenkabel im Bereich der Elektronik keine Schleifen oder Ähnliches bildet, da dies
die Reichweite beeinträchtigen kann!
Achtung!
Der Antennendraht darf sich keinesfalls lockern oder sich im Drehbereich der Rotoren befinden. Andernfalls könnte der Antennendraht ungewollt gekürzt werden oder einen der Rotoren blockieren. In beiden
Fällen droht ein Absturz des Modells.
Wenn Sie Ihren QuadroCopter mit einer Fernsteuerung mit 2,4 GHz ausrüsten wollen, entfällt wegen den
kurzen Antennen dieser Abschnitt.
Durch die Lage des Antennenröhrchens und dem
in der oberen Haube vorgebohrten Lochs kann die
Haube nur in einer Position montiert werden.
Verwenden Sie zur Montage der oberen Abdekkung die beiliegenden Gummibänder.
Dazu fädeln Sie einen Ausleger durch das Band,
spannen dieses in Längsrichtung über die Abdekkung und befestigen es anschließend an dem Haken des Kunststoffrahmens.
Verwenden Sie aus Sicherheitsgründen immer zwei
Bänder gegenläufig.
Bild 11a
20
Bild 11b
Page 21

9. Überprüfung der Konfiguration
a) Allgemein
Führen Sie die Konfiguration des QuadroCopters wie beschrieben durch. Unbedingt erforderlich ist das Einlernen der
Kanäle, da anderenfalls der QuadroCopter Ihre Sendeanlage nicht erkennt. Sobald Sie dies durchgeführt haben, ist
der QuadroCopter flugbereit.
Bei Verwendung einer Computerfernsteueranlage muss diese unbedingt ohne Mischer im Standard-Flächenprogramm
angelernt werden! Um eine korrekte Zuordnung der Steuerknüppel zu den gewünschten Steuerbefehlen durchzuführen, ist es notwendig, den QuadroCopter auf den verwendeten Sender anzulernen.
Dabei speichert die Elektronik des QuadroCopters ab, welcher Kanal welches Steuerkommando überträgt. Grundsätzlich können Sie die Belegung der Steuerhebel frei wählen (je nach Ihren Gewohnheiten), für Anfänger wird aber
empfohlen, die vorgeschlagenen Beispiele zu befolgen.
Ab Werk ist der QuadroCopter auf Mode 2 konfiguriert. Bei den Beispielen handelt es sich um eine gängige Belegung
aus der Praxis vieler Modellpiloten. Überlegen Sie sich, welche Belegung Sie programmieren wollen und führen Sie
dann das Erlernen der Kanäle dementsprechend durch. Weitere Möglichkeiten zum Steuermodus 1, 3 oder 4 finden
Sie in der Anleitung in diesem Kapitel unter Punkt „Mögliche Steuermodi“. Der in diesem Kapitel abgebildete Standard-Sender gehört nicht zum Lieferumfang und ist zum Betrieb genauso gut geeignet wie ein Computer-Sender.
Zur Kontrolle der Konfiguration, der Anzeige von Funktionsstörungen oder dem Betriebszustand sind eine rote und
eine grüne LED auf der Flight-Control „QC09“ installiert. Die jeweiligen Anzeigen entnehmen Sie bitte den nachfolgenden Kapiteln 11 und 12 in dieser Anleitung.
Bei Verwendung von Multiplex-Fernsteuerungen müssen die Servoprotokolle für alle vier Funktionen (Gas,
Rollen, Nicken und Gieren) von „MPX“ auf „UNI“ umgestellt werden.
21
Page 22
b) Erkennen der Kanäle vom Sender (allgemein)
Bevor Sie mit dem Einlernen beginnen, stecken Sie einen eventuell angeschlossenen Akku vom QuadroCopter ab.
Entfernen Sie auch ein eventuell angeschlossenes Verbindungskabel zum PC vom QuadroCopter.
Mit den DIP-Schaltern 1 - 6 (siehe auch Bild 17) werden die gewünschten Modi gesetzt. Schalten Sie hierzu den
betreffenden Schalter in die Stellung „ON“.
Folgende Schalterbelegungen sind möglich:
1 Parameter „Sport-Mode“
2 Parameter „User-Mode“
3 Bootloader-Mode
4 RC-Konfigurations-Mode
5 ohne Funktion
6 ohne Funktion
Zum Anlernen der Fernsteuerung schalten Sie den DIP-Schalter 4 auf Stellung „ON“.
Unabhängig davon, welchen Fernsteuermode (Mode 1 - 4, siehe auch im Kapitel „Mögliche Fernsteuermodi“) anlernen möchten, müssen Sie nachfolgende Reihenfolge der Kanalvergabe und hierzu die Signale der roten LED „LED2“ beachten.
Achten Sie bei der Anlernprozedur unbedingt darauf, nur die geforderten Hebel zu bewegen, ansonsten
wird die Einstellung nicht erkannt!
Schalten Sie nun Ihren Sender ein. Achten Sie darauf, dass sich alle Hebel und Trimmungen des Senders in Neutralstellung befinden. Die dargestellten Beispiele zeigen den Vorgang anhand einer Fernsteuerung im Mode 2. Falls Sie
einen anderen Mode bevorzugen, können die verwendeten Achsen abweichen (siehe im Kapitel „Mögliche Fernsteuermodi“)!
Stellen Sie auch sicher, dass sich an der Fernsteuerung die Schieberegler für die Trimmung in der Neutralstellung
befinden! Ansonsten ist ein korrektes Erkennen der Kanäle nicht möglich! Achten Sie ebenfalls auf die korrekte Richtung der Hebelbewegungen, da anderenfalls die Signale invertiert abgespeichert werden! Computerfernsteueranlagen immer ohne Mischer betreiben!
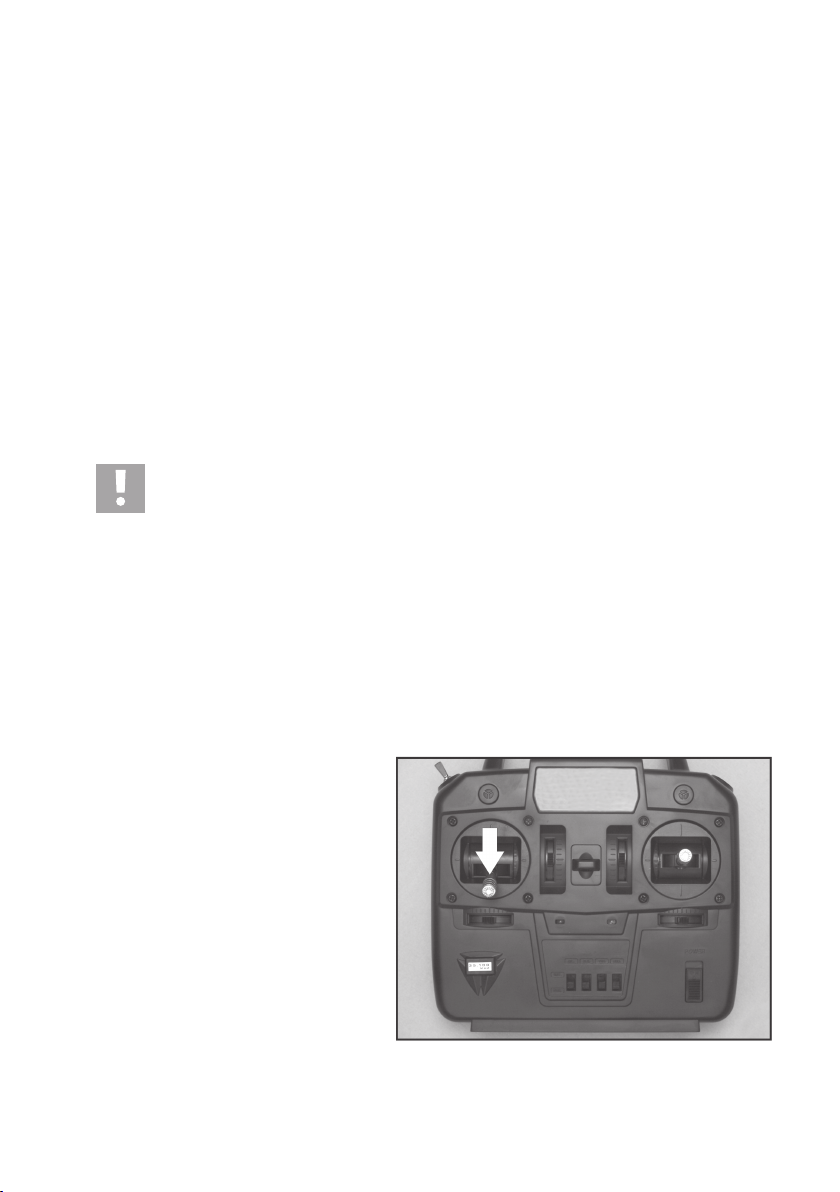
Bewegen Sie den Gashebel (siehe Bild 12) nach
hinten auf die Nullstellung (Motor aus), alle anderen Steuerelemente auf Neutral.
Wollen Sie „Pitch Reverse“ fliegen (bei „Motor aus“
zeigt der Steuerknüppel für Gas vom Körper weg),
dann bringen Sie den Gas-Hebel in die max. Position nach vorne, bevor Sie den Akku anschließen.
22
Bild 12
Page 23

c) „Gas“ erlernen
Schließen Sie den voll geladenen Akku an den QuadroCopter an. Dieser beginnt mit einem Selbsttest und direkt
anschließend mit dem Einlernen der Kanäle. Anhand der Gasstellung erkennt der QuadroCopter automatisch, welchen Kanal Sie für das Gas verwenden wollen.
Als Bestätigung blinkt die rote „LED2“ kurzzeitig beim Initialisieren.
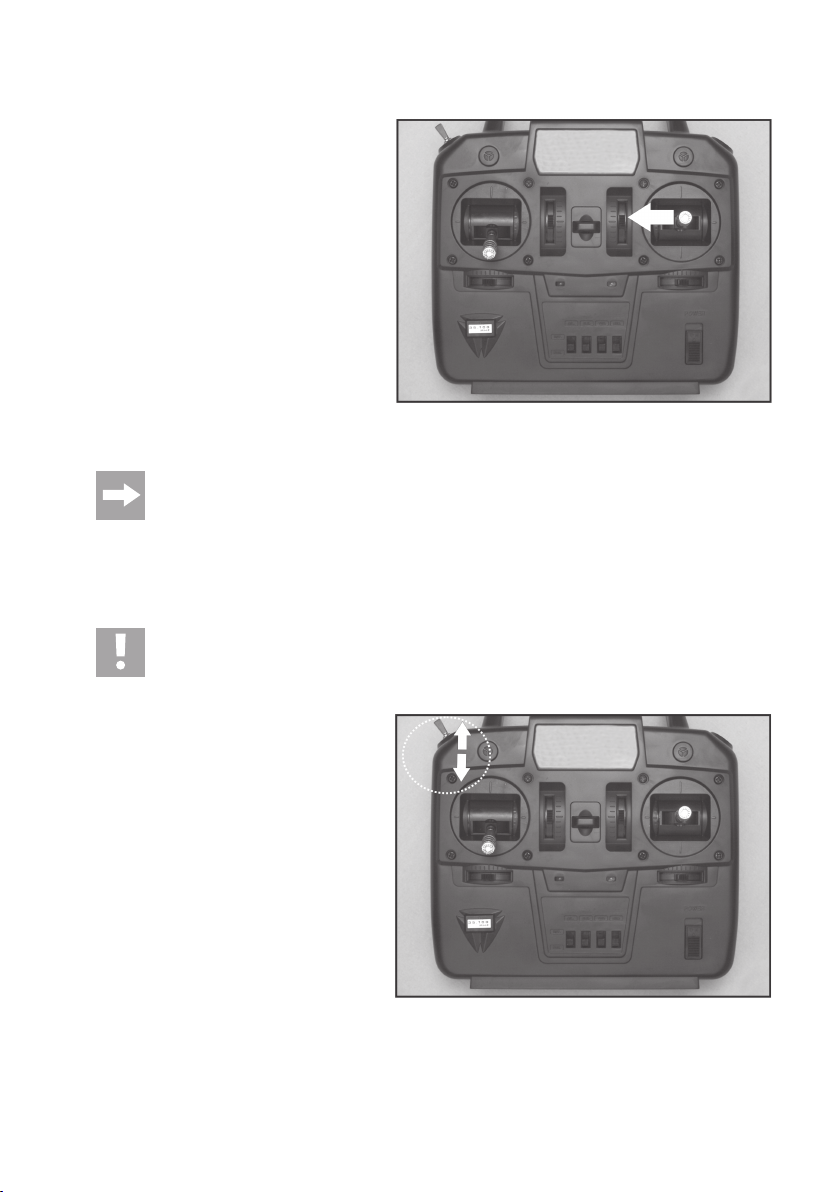
d) „Gier“ erlernen
Bewegen Sie nun den GIER-Hebel (siehe Bild 13)
nach links unten auf Vollausschlag und halten ihn
dort für mindestens eine Sekunde.
Der QuadroCopter erkennt dadurch den GIER-Kanal und speichert diesen ab.
Bewegen Sie den GIER-Hebel wieder auf die
Neutralstellung zurück, GAS bleibt weiterhin auf
null.
Als Bestätigung pulsiert die rote LED des QuadroCopters im 2er-Rhythmus (2x kurzes Blinken, danach Pause usw.).
Die grüne LED zeigt im jeweiligen
Konfigurationsschritt die Kanalnummer
an, solange der Hebel betätigt bleibt!
Wichtig für die Fortschrittsanzeige ist
jedoch nur die rote LED!
Achten Sie bei der Anlernprozedur unbedingt darauf, nur die geforderten Hebel zu bewegen, ansonsten wird die
Einstellung nicht erkannt!
Bild 13
e) „Nick“ erlernen
Bewegen Sie den NICK-Hebel (siehe Bild 14) auf
Vollausschlag für NICK GEBEN ganz nach oben
und halten Sie ihn dort für mindestens eine Sekunde.
Der QuadroCopter erkennt dadurch den NICK-Kanal und speichert diesen ab. Bewegen Sie den
NICK-Hebel wieder auf die Neutralstellung zurück,
lassen Sie GAS weiterhin auf null.
Als Bestätigung pulsiert die rote LED2 des QuadroCopters im 3er-Rhythmus (3x kurzes Blinken, danach Pause usw.).
Bild 14
23
Page 24
f) „Roll“ erlernen
Bewegen Sie den ROLL-Hebel (siehe Bild 15) auf
Vollausschlag für ROLL LINKS nach ganz links und
halten Sie ihn dort für mindestens eine Sekunde.
Der QuadroCopter erkennt dadurch den ROLLKanal und speichert diesen ab. Bewegen Sie den
ROLL-Hebel wieder in die Neutralstellung zurück,
GAS bleibt weiterhin auf null.
Als Bestätigung pulsiert die rote LED des
QuadroCopters im 4er-Rhythmus (4x kurzes Blinken, danach Pause usw.).
g) Schalter für „Agility-Mode“ erlernen
In die montierte Flight Control „QC 09“ sind zur Fluglagenstabilisierung hochwertige MEMS-Sensoren
eingebaut. Dadurch werden relativ einfach zu beherrschende Flugeigenschaften, ähnlich eines KoaxHelikopters, erreicht.
Die Agilität des QuadroCopters wird aber durch diese Sensorik eingeschränkt. Wird die Funktion „AgilityMode“ aktiviert, werden die Sensoren in der Flight Control in ihren Funktionen eingeschränkt. Der QuadroCopter ist in diesem Modus um alle Achsen deutlich agiler steuerbar. Die Flugeigenschaften ähneln nun
eher einem Helikopter. Zudem ist einfacher Kunstflug (Looping, Rollen) möglich.
Die Flugeigenschaften bei aktivierter Funktion „Agility-Mode“ sind nicht mehr für Anfänger geeignet. Sofern Sie nicht über ausreichende Flugerfahrung mit QuadroCoptern und/oder Helikoptern verfügen, empfehlen wir, die ersten Flüge mit aktiviertem „Agility-Mode“ mit entsprechender Vorsicht durchzuführen. Die
Funktion „Agility-Mode“ ist weder im Beginner- noch im Sport-Mode, sondern nur im User-Mode möglich.
Um Kanal 5 zur Aktivierung des „Agility-Mode“ zu
lernen, muss ein Schalter am Fernsteuersender
(Bild 16) zweimal betätigt werden (Ein - Aus).
Beim Anlernen von Kanal 5 bedeutet die letzte
Position des angelernten Schalters, dass in dieser
Schalterstellung die Funktion „Agility-Mode“
deaktiviert ist.
Als Bestätigung erlischt die rote LED des QuadroCopters und die grüne LED leuchtet dauerhaft.
Der Einlernvorgang ist damit erfolgreich abgeschlossen.
Bild 15
24
Bild 16
Page 25
Stecken Sie den Akku vom QuadroCopter ab und schalten den DIP-Schalter 4 wieder auf „OFF“.
Andere bereits gesetzte DIP-Schalter (z.B. 1 = Sport-Modus) können Sie belassen. Das Einlernen der Kanäle ist nun
abgeschlossen.
Wichtig!
Wird nach dem Anlernen der Roll-Funktion nicht innerhalb von fünf Sekunden ein Schalterkanal für den
„Agility-Mode“ angelernt, wird die RC-Konfiguration automatisch beendet. In diesem Fall leuchtet LED1
(grüne LED) dauerhaft, der „Agility-Mode“ steht aber nicht zur Verfügung.
Wollen Sie die Funktion „Agility-Mode“ anlernen, müssen Sie den Anlernvorgang erneut starten. Der Schalter
am Fernsteuersender muss auf einen beliebigen Empfängerkanal wirken, darf jedoch nicht Kanal 1 - 4
sein bzw. diese Kanäle durch Mischer beeinflussen. Kontrollieren Sie bei Computerfernsteuersendern die
Wirksamkeit des Schalters mit einem Servo (z.B. an einen Empfänger anschließen) oder einer geeigneten Anzeige Ihres Senders.
Auf dem Schaltkanal für den „Agility-Mode“ dürfen senderseitig weder eine Wegbegrenzung, Dual Rate,
Expotentional oder andere Mischer programmiert werden. Die erlernten Kanäle können während der Anlernphase per serieller Statusmeldungen im QuadroCopter-Konfigurationskit oder in einem anderen seriellen Terminal überwacht werden.
Wird Kanal 5 nicht angelernt oder ein Fernsteuersender mit nur 4 Kanälen genutzt, so ist die Funktion „Agility-Mode“
dauerhaft deaktiviert.
Beachten Sie auch die nachfolgenden Hinweise im Kapitel „Funktion Agility-Mode“ und im Kapitel „Der erste Flug“.
h) Einstellung des Flugmodus
Der QuadroCopter bietet drei unterschiedliche Flugmodis:
• Beginner-Modus (geeignet für Anfänger)
• Sport-Modus (geeignet für geübte QuadroCopter Piloten; geringere Achsbegrenzung und höhere Dynamik)
• User-Modus (Flugparameter einstellbar mit einer PC-Software, siehe Kapitel Konfiguration mit PC-Software)
Mit den DIP-Schaltern 1und 2 (siehe auch Bild 17) werden die gewünschten Modi gesetzt. Schalten Sie hierzu den
betreffenden Schalter in die Stellung „ON“. Folgende Schalterbelegungen sind möglich:
DIP-Schalter 1: „Sport-Mode“
DIP-Schalter 2: „User-Mode“
Sind die DIP-Schalter 1 und 2 nicht aktiviert (Stellung „OFF“), ist der „Beginner“-Modus aktiv.
Werden mit dem QuadroCopter-Konfigurationskit im User-Modus Parameter verändert, so werden diese
im Parametersatz „User“ abgespeichert. Werden Parameter verändert und Sie befinden sich im Parametersatz „Beginner“-Modus (bzw. „Sport-Modus“), so werden diese Änderungen übernommen und auch im
Parametersatz „User“ gesichert. Der alte Parametersatz vom „User“-Modus wird somit überschrieben.
Ist der DIP-Schalter 2 nicht im „User-Mode“ gesetzt (Schalter 2 nicht auf „ON“), so werden nach einem
Reset (z.B. nach einem Akkuwechsel) wieder die Standard-Beginner- bzw. Sport-Parameter geladen.
25
Page 26
Tipp aus der Praxis:
Speziell Anfängern ist es dringend angeraten, die Direktheit der Steuerbefehle zu reduzieren, mit der der QuadroCopter Steuerbefehle der Fernsteuerung um die Mittellage herum umsetzt (negatives Exponential oder „Expo“).
Zur Verdeutlichung:
Normalerweise reagiert der QuadroCopter linear. Das bedeutet, dass sich der Steuerknüppelausschlag und die Reaktion synchron zueinander verhalten. Mit negativem Expo wird erreicht, dass der QuadroCopter am Anfang der
Steuerbewegung relativ träge, dafür aber bei stärkeren Steuerausschlägen umso heftiger auf den Steuerbefehl reagiert. Dieses Verhalten kommt besonders dem Einsteiger zugute, der anfänglich dazu neigt, zu übersteuern, also die
Knüppel der Fernsteuerung heftiger als notwendig zu bewegen. Dieser Effekt ist aber natürlich nur bei den drei
Steuerachsen (Rollen, Nicken und Gieren) erwünscht, nicht jedoch beim Gas. Daher gilt: Kein Expo auf die GasFunktion legen.
Mit anderen Worten: Mit negativem Expo erreicht man ein trägeres Verhalten des Fluggerätes auf Steuerbewegungen
im Bereich der Mittellage der Steuerknüppel. Dies geschieht entweder über die optional erhältliche Software, über die
Schalter des QuadroCopter (siehe „Beginner-Modus“) oder über eine vorhandene „Expo“-Funktion der Fernsteuerung. Die Möglichkeit zur Einstellung von „Expo“ haben nur Computerfernsteueranlagen. Jedoch ist Vorsicht geboten,
denn je höher das negative Expo gewählt wird, desto aggressiver reagiert der QuadroCopter bei Knüppelbewegungen
im Bereich des Endausschlags.
Für den Flugmodus „User“ müssen Sie mit der optional erhältlichen Konfigurationssoftware Ihr eigenes
„Setting“ programmieren. Hierzu können Sie als Vorlage entweder den Beginner- oder den Sport-Modus
verwenden und Ihren individuellen Wünschen anpassen. Beachten Sie hierzu die Hinweise in der Bedienungsanleitung des Konfigurations-Sets.
i) Konfiguration mit der PC-Software
Um den QuadroCopter komplett mit eigenen Parametern zu fliegen, ist es möglich, die Elektronik des QuadroCopters
über ein Schnittstellenkabel Seriell-TTL auf USB an einen PC anzuschließen.
Optional ist hierfür ein PC-Konfigurationskit erhältlich. Dieses enthält ein Verbindungskabel, eine detaillierte Beschreibung sowie die Software auf CD. Dieses Kit ist verwendbar für Microsoft® Windows XP®*, Windows Vista®* und
Windows 7®* (* Microsoft, Windows XP, Windows Vista und Windows 7 sind eingetragene Markenzeichen der Microsoft Cooperation in den USA und anderen Ländern).
Da es für einen normalen Flugbetrieb nicht notwendig ist, eine Konfiguration mittels PC durchzuführen, ist dies hier
auch nur am Rande erwähnt.
Wenn der DIP-Schalter 3 auf „ON“ gesetzt ist, befindet sich der QuadroCopter im PC-Konfigurationsmodus (PCModus) und kann nicht geflogen werden. Nähere Informationen zur Konfiguration zum Anschluss an die Flight Control
„QC 09“ und der Programmierung finden Sie in der Bedienungsanleitung der Software.
Im PC-Modus (auch „Bootloader-Betrieb“ genannt) muss die grüne „LED1“ dauerhaft mit ca. 1 Hz blinken. Die rote
„LED2“ blinkt während der Kommunikation mit dem Computer in schnellem, unterschiedlichen Rhythmus.
26
Page 27
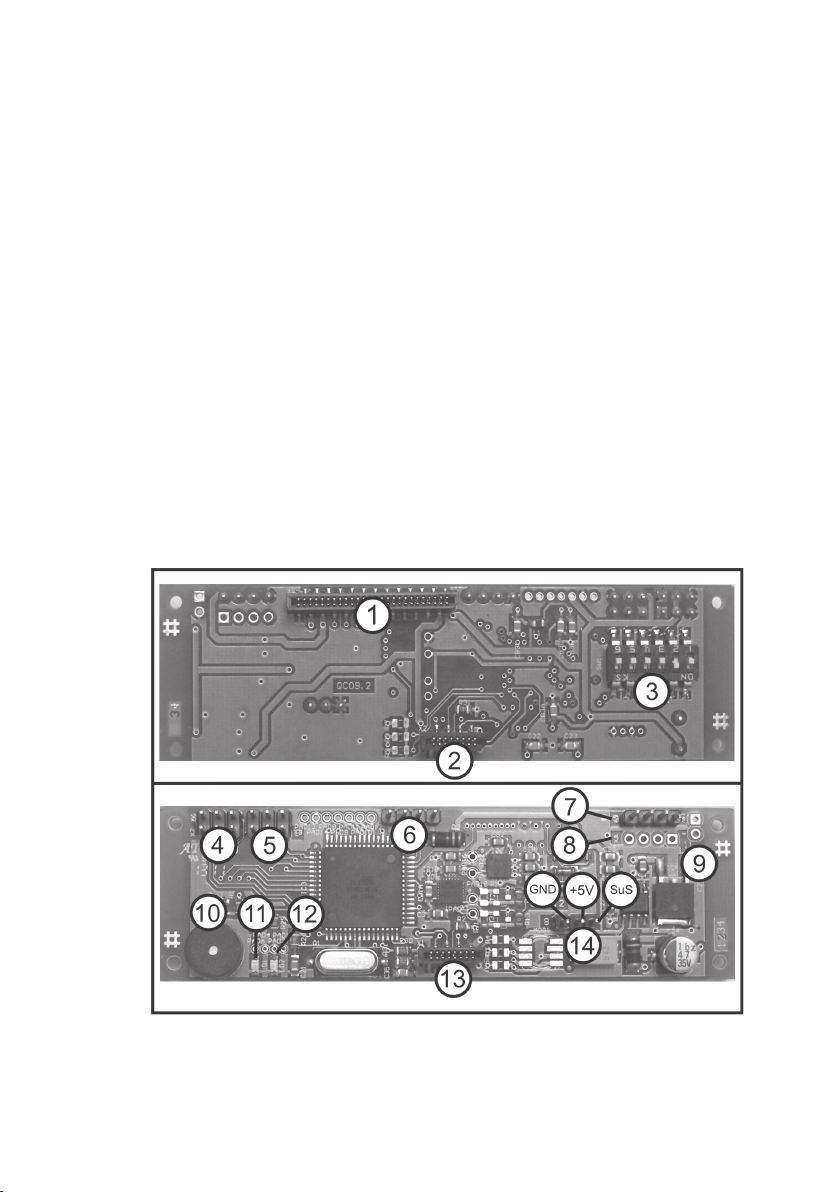
j) Anschlüsse und Signalelemente der Flight Control „QC 09“
1 X5 Schnittstelle zu Erweiterungsboards
2 X2 Schnittstelle zu den Motortreibern
3 SW1 DIP-Schalter 1-6 für die Mode-Umschaltung
4 X6 / X7 ohne Funktion
5 X3 ohne Funktion
6 X10 Serielle Schnittstelle zur Programmierung und Statusmeldungsausgabe
7 X9 Zweite serielle Schnittstelle für externe Steuerbefehle (aktuelle Informationen hierzu finden Sie im
8 X4 ohne Funktion
9 X11 ohne Funktion
10 Buzzer Signalgeber
11 LED1 grüne LED
12 LED2 rote LED
13 X1 Schnittstelle zu den Motortreibern
14 X8 Summensignaleingang
Downloadcenter von www.conrad.com)
Bild 17
27
Page 28
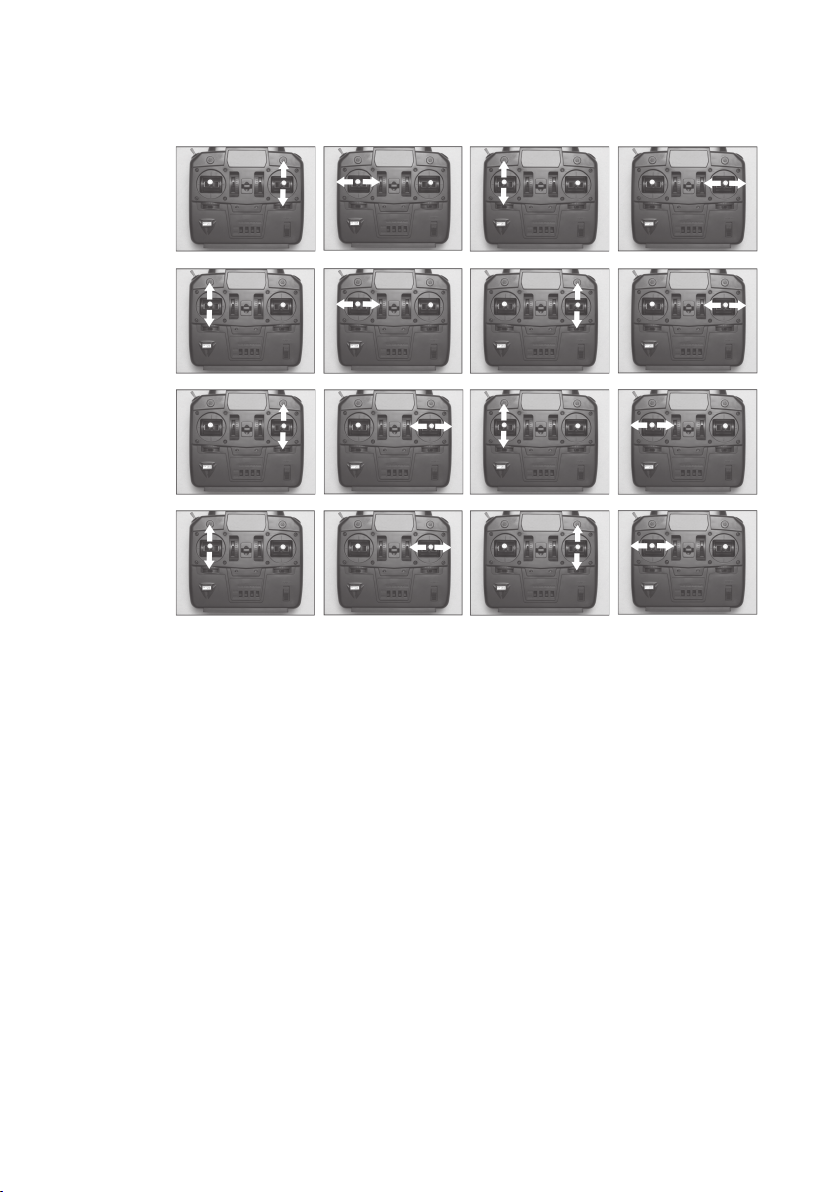
k) Mögliche Fernsteuermodi
Mode Gas Gier Nick Roll
1
2
3
4
10. Vor jeder Inbetriebnahme
a) Überprüfen der Verschraubungen
Überprüfen Sie nach dem Transport und vor dem Fliegen unbedingt alle Verschraubungen auf festen Sitz. Durch die
Erschütterungen beim Transport und beim Fliegen können sich Verschraubungen lockern. Daher müssen Sie, wie bei
einem echten Hubschrauber, einen gründlichen Pre-flight-check durchführen.
b) Überprüfen der beweglichen Teile
Überprüfen Sie vor dem Fliegen unbedingt alle beweglichen und gelagerten Teile auf Leichtgängigkeit. Sie müssen
leicht beweglich sein, dürfen aber kein Spiel aufweisen.
28
Page 29

c) Abgleich der Neutrallage
Damit die Stabilisierung des QuadroCopters korrekt arbeitet, muss die Neutrallage eingestellt werden. Dies ist die
Position, die der QuadroCopter versucht zu stabilisieren, sofern kein anderes Flugmanöver gewünscht ist.
Gehen Sie dabei in folgender Reihenfolge vor:
1) Schalten Sie den Sender ein.
2) Stellen Sie GAS auf null und alle anderen Hebel und Trimmungen in die Neutralstellung.
3) Stellen Sie den QuadroCopter auf eine waagrechte, ebene Fläche.
4) Schließen Sie den Akku an den QuadroCopter an.
5) Die rote LED des QuadroCopters muss aus sein und die grüne LED muss leuchten.
6) Bewegen Sie GAS auf Vollausschlag und
GIER auf rechten Vollausschlag (Bild 18).
Bild 18
7) Die grüne LED des QuadroCopters blinkt als Bestätigung und die Neutrallage ist abgespeichert.
8) Bewegen Sie das GAS wieder auf 0, GIER, NICK und ROLL in die Neutralstellung.
9) Die rote LED ist aus und die grüne LED muss leuchten. Der QuadroCopter ist nun startbereit.
Sollten Sie die Neutrallage nicht einstellen, so verwendet der QuadroCopter entweder die Werkseinstellung oder den
zuletzt gespeicherten Wert!
Es ist von entscheidender Bedeutung, die Neutrallage des QuadroCopters möglichst genau einzustellen.
Hierzu ist es notwendig, die Neutrallage auf einer absolut horizontalen Unterlage einzustellen. Idealerweise misst man diese mit einer Wasserwaage aus.
Vor einem Erstflug wird deshalb dringend empfohlen, die Neutrallage einzustellen. Aufgrund anderer Umgebungsbedingungen als im Werk bzw. am tatsächlichen Flugort kann die Werkseinstellung nicht ideal sein!
Falls der QuadroCopter trotz entsprechenden Trimmungen am Sender immer noch nach einer Richtung ausbricht,
muss die Neutrallage nochmals abgespeichert werden, in dem der QuadroCopter leicht an der Seite angehoben
wird, in die der QuadroCopter ausbricht. Somit speichert man diese (manipulierte) Position als neue Nulllage ab.
29
Page 30

11. Sicherheitseinrichtungen
Der QuadroCopter ist mit einer Reihe von Sicherheitseinrichtungen versehen, die das Modell vor Schäden bewahren
bzw. mögliche Schäden auf ein Minimum reduzieren sollen. Sie Schutzmechanismen werden per LED-Anzeigen
kenntlich gemacht. Beachten Sie hierzu auch das nachfolgende Kapitel 12.
a) Motorschutz
Die Steuerelektronik verfügt über einen Motorschutz, die alle Motoren bei einem Blockieren eines Rotors (z. B. nach
einem Absturz) sofort automatisch abschaltet. Nach einer Überprüfung auf eventuelle Schäden können die Motoren
mittels des normalen Steuerkommandos „Start der Motoren“ wieder gestartet werden.
b) Notlandung
Stellt die Steuerelektronik des QuadroCopter zu starke Störungen des Fernsteuersignals fest, versucht sie, den QuadroCopter in einer waagrechten Position auszurichten.
Ist die Störung des Empfangs weiterhin vorhanden, so wird das Gas auf einen Wert knapp unter Schwebeflug (ohne
Zusatzgewicht) gestellt und der QuadroCopter beginnt einen Sinkflug.
Ist die Störung des Empfangs vorbei, kann der Modellpilot jederzeit durch eigene Steuerkommandos eingreifen und
das Notlandeprogramm wird beendet.
c) Unterspannungsüberwachung
Der QuadroCopter überwacht ständig die Spannung des angeschlossenen Akkus. Sinkt diese über einen bestimmten
Zeitraum unter einen kritischen Wert, so wird dies durch die LEDs angezeigt.
Dabei blinkt die rote LED und die grüne LED leuchtet dauernd. Diese Anzeige kann nur durch Abstecken des Akkus
abgeschaltet werden.
Um im Flug einen schwachen Akku festzustellen, empfiehlt es sich, zeitweise starke Gasschübe durchzuführen. Reagiert der QuadroCopter träge und schwach, so sollte eine Landung durchgeführt und der Akku überprüft werden.
Dieser Test ist allerdings aufgrund der Leistung nur schwer erkennbar.
Bei einem längeren ununterbrochenen Flugbetrieb empfiehlt es sich ferner, auch die LED-Anzeigen durch eine zeitweise Landung zu überprüfen!
Tipp aus der Praxis:
Um Schäden am QuadroCopter durch Absturz wegen Unterspannung bzw. am Akku durch Tiefentladung zu vermeiden, empfehlen wir, im Flug unbedingt die Leuchtsignale zur Unterspannungsanzeige zu beachten. Da die eingebauten LEDs nur in eine Richtung abstrahlen, empfehlen wir den zusätzlichen Einbau des LiPo-Savers (Conrad Best.-Nr.
230327). Der Lipo-Saver zeigt Ihnen per Lichtsignal eine drohende Unterspannung an. Platzieren Sie den LiPo-Saver
an geeigneter Stelle im QuadroCopter und schließen diesen (z.B. über den Balanceranschluss des Akkus) an.
30
Page 31

12. LED-Anzeigen
Werden von der Flight Control während dem Selbsttest, dem Start der Motoren oder während des Fluges Fehlfunktionen festgestellt, werden diese Funktionsstörungen per LED-Anzeigen von „LED1“ und „LED2“ optisch gemeldet.
Folgende LED-Codes sind möglich:
Normalbetrieb:
Initialisierung Rot und Grün dauerhaft an
Initialisierung OK, nicht gestartet Grün an, Rot aus
Motor gestartet, Gas auf Low Rot an, Grün blinkt langsam (2 Hz)
Flugbetrieb Rot an, Grün an
Notlandung (*) Rot und Grün blinken im langsamen Gleichtakt (2 Hz)
Neutrallagenabgleich Rot aus, Grün blinkt schnell (8 Hz)
Funkausfall (*) Rot und Grün blinken im langsamen Gegentakt (2 Hz)
Gas nicht auf unterster Stellung (*) Rot und Grün blinken im schnellen Gegentakt (10 Hz)
Low-Bat Level 1 und 2 (*) Grün an, Rot blinkt schnell (8 Hz)
Motor-Fehler (*) Grün aus, rot blinkt 2x kurz, kurze Pause
Bei den LED-Anzeigen, die oben mit einem Stern (*) gekennzeichnet sind, handelt es sich um Sicherheitsanzeigen. Die Ursachen hierfür müssen erforscht und abgestellt werden!
Funkausfall (gestörte Funkverbindung)
Mögliche Ursachen: Empfängerquarz aus dem Sockel gefallen; Empfängerquarz defekt; Empfängerantenne abgerissen; Empfänger hat das „Binding“ verloren und muss neu „gebunden“ werden; Senderantenne nicht ausgezogen;
zweiter Sender mit gleichen Sendekanal eingeschaltet; Batterien/Akkus vom Sender leer.
Überprüfen Sie die möglichen Ursache und starten führen Sie einen erneuten Startversuch durch.
Sollte im Flug eine dauerhafte Funkstörung bestehen, so leitet der QuadroCopter eine Notlandung ein und die LEDs
zeigen auch hier durch Blinken eine gestörte Funkverbindung an.
Notladefunktion
Während des Betriebs herrscht eine dauerhafte Funkstörung vor. Der QuadroCopter leitet hierbei selbstständig eine
Notlandung ein. Die rote und grüne LED blinken langsam und gleichzeitig. Beachten Sie den Abschnitt „Funkausfall“
und suchen Sie nach der Ursache.
Verwenden Sie zur Steuerung des QuadroCopters eine Computerfernsteuerung mit integrierter FailsafeFunktion, so muss das Failsafe deaktiviert werden. Ist eine komplette Deaktivierung des Failsafe nicht
möglich, wird von der Flight Control das Failsafe-Signal als Steuersignal erkannt. Durch diesen Umstand
könnte die Flight Control entgegen den Angaben in der Bedienungsanleitung keine Notlandefunktion einleiten. Auch reagieren weder Signalgeber noch LED-Anzeigen wie in den Bedienungsanleitungen aufgezeigt. In diesem Fall empfehlen wir, durch Versuche eine geeignete Gasstellung im Failsafe-Betrieb zu
ermitteln, die eine „sanfte“ Landung durch entsprechende Gassteuerung einleitet.
31
Page 32

Unterspannungserkennung
Die Akkuspannung wird permanent überwacht. Bei Unterschreitung einer bestimmten Akkuspannung (Schwellwert
ca. 9,4 V) fängt die rote LED an, im schnellen Rhythmus zu blinken. Die grüne LED leuchtet dauernd. Diese Anzeige
kann nur noch durch Abstecken des Flugakkus zurück gesetzt werden. Wenn die rote LED blinkt, sollten Sie schnellstens eine Landung einleiten und den Flugbetrieb einstellen.
Sollte an den QuadroCopter ein nicht vollständig geladener Akku angeschlossen werden, kann es ebenfalls zu einer Unterspannungserkennung kommen und die Motoren starten nicht. Laden Sie in diesem Fall
den Flugakku erst vollständig auf und probieren Sie den Start erneut.
Wird die Ladeschlussspannung des Akkus erreicht, fängt die rote LED „LED2“ in schnellem Rhythmus an zu blinken.
Gleichzeitig fängt der Signalgeber an, in langsamen Rhythmus Töne abzugeben. Landen Sie unmittelbar, nach dem
Sie diese Signale wahrnehmen. Ignorieren Sie diese Signale, erfolgt eine weitere Entladung des Akkus und der
Signalgeber fängt an, in schnellem Rhythmus Warntöne auszugeben. Werden weiterhin die Alarmsignale ignoriert,
schaltet die Flight Control ab einem bestimmten Spannungswert des Akkus die Motoren ab. Der QuadroCopter stürzt
dann unweigerlich ab. Verlust von Gewährleistung/Garantie!
Motorfehler
Die Elektronik stellt einen Fehler bei einem oder mehreren Motoren fest. Überprüfen Sie die Anschlusskabel der
Motoren auf Kabelbrüche und einer guten Verlötung auf den Motortreiberplatinen. Achten Sie auf einen leichten Lauf
der Rotoren. Beachten Sie hierzu die Hinweise in den Kapiteln „Montage der Rotoren“ und „Wartung, Pflege, Reparatur“.
Die aufgezeigten Störungen sind meistens nicht von Dauer, sondern durch kurzzeitige Umstände entstanden. Durch das Abstecken des Akkus wird ein Reset erzeugt, der in den meisten Fällen den Fehler eliminiert. Dauerhaften Störungen muss auf den Grund gegangen werden. Beachten Sie bei den optischen
Meldungen der LEDs und auch alle Hinweise, die im Kapitel 13 beschrieben werden.
32
Page 33

13. Akustische Meldungen des Signalgebers
Werden von der Flight Control während dem Selbsttest, dem Start der Motoren oder während des Fluges Fehlfunktionen festgestellt, werden diese Funktionsstörungen per Signalgeber akustisch gemeldet. Folgende Codes sind möglich:
Fehler Tonsignal
Gyro-Fehler beim Nullabgleich Roll 1 x kurz, dann 1 s Pause
Gyro-Fehler beim Nullabgleich Nick 2 x kurz, dann 1 s Pause
Gyro-Fehler beim Nullabgleich Gier 3 x kurz, dann 1 s Pause
Motor-Fehler vorne 1 x lang, 1x kurz, dann 1 s Pause
Motor-Fehler hinten 1 x lang, 2x kurz, dann 1 s Pause
Motor-Fehler rechts 1 x lang, 3x kurz, dann 1 s Pause
Motor-Fehler links 1 x lang, 4x kurz, dann 1 s Pause
Notlandung Dauerton
Unterspannung Level 1 1 Hz (langsame Tonfolge)
Unterspannung Level 2 2,5 Hz (schnellere Tonfolge)
Signalisierung Flugbereitschaft 1 x kurz (0,5 s)
Signalisierung Nullabgleich 1 x kurz (0,5 s)
Signalisierung Motorstart 1 x kurz (0,5 s)
Signalisierung Motorstopp 1 x kurz (0,5 s)
Die aufgezeigten Störungen sind meistens nicht von Dauer sondern durch kurzzeitige Umstände entstanden. Durch das Abstecken des Akkus wird ein „Reset“ erzeugt, dass in den meisten Fällen den Fehler
eliminiert. Dauerhaften Störungen muss auf den Grund gegangen werden. Beachten Sie bei den akustischen Meldungen des Signalgebers auch alle Hinweise, die in dieser Bedienungsanleitung unter dem
Punkt „LED-Anzeigen“ beschrieben werden.
33
Page 34

14. Informationen zum ersten Start
a) Allgemeines Steuerverhalten
Grundsätzlich ist ein QuadroCopter vom Steuerverhalten wie ein normaler Helikopter zu sehen. Die Unterschiede
liegen jedoch im Detail. Bei Helikoptern wird der Drehmomentausgleich durch spezielle Gyros (in der Gier-Funktion)
stabilisiert. Hierbei gibt es zwei unterschiedliche Systeme: „Normale Gyros“ oder Gyros mit der Funktion „Heading
Lock“.
Normale Gyros stabilisieren (dämpfen) den Heckrotor gegen Drehbewegungen, die verursacht durch den Piloten
(Drehzahl- bzw. Pitch-Änderungen) bzw. äußeren Einwirkungen (z.B. Seitenwind) entstehen. Ein Gyro mit „Heading
Lock“-Funktion hat dagegen eine Haltewirkung gegen diese Drehbewegungen. Beide Systeme reagieren nach einem
Steuerbefehl (z.B. „Gier nach links“ und anschließender Neutralstellung) mit einem sofortigen Stillstand der Drehbewegung.
In Ihrem QuadroCopter sind - abweichend von herkömmlichen Helikoptern - drei Gyros auf den Funktionen Gier, Nick
und Roll eingebaut. Die eingebauten Gyros sind - verglichen mit herkömmlichen Gyros - weder als „normaler Gyro“
noch als Gyro mit „Heading Lock“-Funktion zu bezeichnen.
Die Gyros im QuadroCopter sind in der Art miteinander verknüpft, dass der QuadroCopter nach Beendigung eines
Steuerbefehls immer versucht, wieder in die Neutrallage (Schwebeflug) zu gelangen. Wie gut dies gelingen kann, ist
natürlich abhängig von den zur Verfügung stehenden Platzverhältnissen, der Fluggeschwindigkeit bzw. dem vorherrschenden Flugzustand, den Trimmwerten des QuadroCopters sowie den äußeren Flugbedingungen wie z.B. Wind.
In der im QuadroCopter montierten Flight Control „QC 09“ sind hochwertige MEMS-Sensoren eingebaut. Dadurch
werden relativ einfach zu beherrschende Flugeigenschaften, ähnlich eines Koax-Helikopters, erreicht.
Die Agilität des QuadroCopters wird aber durch diese Sensorik eingeschränkt. Wird die Funktion „Agility-Mode“ aktiviert, werden die Sensoren in der Flight Control in Ihren Funktionen eingeschränkt. Der QuadroCopter ist in diesem
Modus um alle Achsen deutlich agiler steuerbar. Die Flugeigenschaften ähneln nun eher einem Helikopter. Zudem ist
einfacher Kunstflug (Looping, Rollen) möglich.
Die Flugeigenschaften bei aktivierter Funktion „Agility-Mode“ sind jedoch nicht mehr für Anfänger geeignet. Sofern Sie
nicht über ausreichende Flugerfahrung mit QuadroCoptern und/oder Helikoptern verfügen, empfehlen wir, die ersten
Flüge mit aktiviertem „Agility-Mode“ mit entsprechender Vorsicht durchzuführen.
b) Starten der Motoren
• LEDs zeigen „Ready to Fly“ an
• GAS auf null, GIER auf Vollausschlag nach links, NICK und ROLL bleiben auf neutral (siehe auch Bild 12)
• Rotoren beginnen zu drehen und gehen auf Leerlaufdrehzahl
• Rote LED leuchtet dauernd und die grüne LED blinkt („Motoren an“)
• GAS langsam erhöhen zum Abheben (Schwebeflug)
34
Page 35

c) Stoppen der Motoren
Die laufenden Motoren können folgendermaßen abgestellt werden:
• GAS auf null, GIER auf Vollausschlag nach rechts, NICK und ROLL bleiben auf Neutral
• Rotoren stoppen
• Rote LED ist aus, grüne LED leuchtet dauernd („Ready to Fly“)
d) Schwebeflug
Um die Erklärung der Steuerung einfacher und einheitlicher zu gestalten, werden auch hier die klassischen Begriffe verwendet. Diese kommen aus der Fliegersprache und haben sind weit verbreitet.
Richtungsbezeichnungen sind dabei stets aus der Perspektive eines „virtuellen“ Piloten im Modell zu verstehen. Der
Richtungsanzeiger im Landebein gilt als „vorne“. Die Erklärungen basieren alle auf einer Konfiguration der Fernsteuerung im Mode 2.
Als Schweben wird jener Flugzustand bezeichnet, an dem der QuadroCopter weder steigt noch sinkt, somit die nach
oben gerichtete Auftriebskraft gleich der nach unten gerichteten Gewichtskraft ist. Dies wird in etwa bei mittlerer
Gasstellung erreicht (allerdings abhängig von einer eventuell vorhandenen Nutzlast).
Bei einem Flug knapp über dem Boden sowie beim Start entstehen Verwirbelungen und Luftströmungen,
die den QuadroCopter beeinflussen. Dadurch ergibt sich eine schnellere Reaktion auf die Steuerbewegungen sowie ein leichtes Ausbrechen des QuadroCopter nach vorne, hinten oder zur Seite. Ab
einer Flughöhe von ca. einem Meter ist dieser Effekt nicht mehr zu spüren. Der QuadroCopter lässt sich
nun leichter und präziser steuern.
e) Gier
Als Gier wird die Drehung des QuadroCopter um
die Hochachse (senkrechte Achse) genannt.
Diese Bewegung tritt entweder ungewollt aufgrund
des Drehmoments der Rotoren oder gewollt als
Flugrichtungsänderung auf.
Beim QuadroCopter wird diese Bewegung nicht mit
einem Heckrotor kontrolliert, sondern durch
Drehzahländerung der einzelnen Rotoren zueinander.
Der Punkt (1) zeigt „vorne“ an.
Bild 19
35
Page 36

f) Nick
Als Nick wird die Bewegung um die Querachse
bezeichnet, vergleichbar mit der Nickbewegung
eines Kopfes. Dadurch gewinnt der QuadroCopter
an Fluggeschwindigkeit vorwärts bzw. rückwärts
oder bremst ab.
Der Punkt (1) zeigt „vorne“ an.
g) Roll
Als Roll wird die Bewegung um die Längsachse
bezeichnet, vergleichbar mit dem seitwärts Rollen
einer Kugel (oder dem seitwärts Gehen einer Krabbe). Dadurch bewegt sich durch Anheben einer
Seite der QuadroCopter unabhängig seiner Vorwärtsrichtung zur Seite.
Der Punkt (1) zeigt „vorne“ an.
Bild 20
36
Bild 21
Page 37

15. Der erste Flug
Die ersten Flugversuche sollten Sie mit eingeschalteten Sensoren durchführen (Funktion „Agility-Mode“ ist deaktiviert),
um sich an die Flugeigenschaften gewöhnen.
Nach erfolgter Eingewöhnungsphase aktivieren Sie in ausreichender Höhe über Grund an Ihrem Fernsteuersender
die Funktion „Agility-Mode“. Die Sensoren sind jetzt in ihrer Wirksamkeit eingeschränkt. Ihr QuadroCopter reagiert
nun ähnlich einem Helikopter und die Steuerreaktionen sind deutlich agiler.
Sind die im „Agility-Mode“ vorherrschenden Flugeigenschaften für Sie noch nicht 100%ig beherrschbar, so können
Sie jederzeit im Flug die Sensorik wieder einschalten. Der QuadroCopter hat dann wieder die gewohnten Flug- und
Steuereigenschaften.
Im „Agility-Mode“ kann mit dem QuadroCopter einfacher Kunstflug (Loopings und Rollen) durchgeführt werden. Die
Durchführung dieser Flugfiguren sollten jedoch in ausreichend großer Flughöhe durchgeführt werden.
Wichtig!
Stellen Sie vor dem Einschalten des Senders den Gasknüppel auf „Motoren aus“ und alle Trimmhebel der
Steuerknüppel auf null (Trimmung Mitte). Andernfalls könnte es sein, dass der QuadroCopter nach dem
Anschluss des Flugakkus den Sender nicht erkennt.
Achtung!
Die Flugeigenschaften bei aktivierter Funktion „Agility-Mode“ sind nicht mehr für Anfänger geeignet. Sofern Sie nicht über ausreichende Flugerfahrung mit QuadroCoptern und/oder Helikoptern verfügen, empfehlen wir, die ersten Flüge mit aktiviertem „Agility-Mode“ mit entsprechender Vorsicht durchzuführen.
Anders als bei kunstflugtauglichen Helikoptern dürfen Sie bei einem Looping oder einer Rolle in der Rückenlage des
QuadroCopters nicht das Gas zurücknehmen, da die Flugbewegungen einzig durch Drehzahländerungen der Rotoren erwirkt werden. Ist das Gas in der Rückenlage zu niedrig, sind die möglichen bzw. erforderlichen Drehzahländerungen der einzelnen Rotoren durch die Flight Control für Kunstflugfiguren nicht mehr möglich. Der QuadroCopter wird in diesem Fall unkontrollierbar!
Achten Sie auf eine besonders gute Akkubefestigung an Ihrem QuadroCopter, die zuverlässig das Lösen oder Verrutschen des Akkus verhindert.
Schalten Sie die Fernsteuerung ein. Schließen Sie danach den Flugakku an. Der QuadroCopter quittiert einen kurzen
Selbsttest mit einem Dauerleuchten der grünen LED. Im Fehlerfall blinken die LEDs.
Falls ein Fehler auftritt, muss der Akku abgesteckt und nach Beseitigung des Fehlers (z.B. Gas nicht auf Nullposition)
wieder angesteckt werden. Im Fehlerfall können die Motoren aus Sicherheitsgründen nicht gestartet werden. Achten
Sie darauf, dass der QuadroCopter möglichst waagerecht steht, wenn der Akku angesteckt wird.
Bis zum Aufleuchten der grünen LED werden alle Sensoren intern abgeglichen und während dieser Zeit darf der
QuadroCopter nicht bewegt werden. Falls der Startplatz nicht eben ist, empfiehlt es sich, den Abgleich auf einer
waagerechten Unterlage durchzuführen und die Neutrallage durch Vollgas/Gier Rechts zu speichern (siehe Kapitel
„Neutrallage einstellen“).
Starten Sie die Motoren (mit Gas auf Null, Gier links) und lassen Sie die Motoren im Standgas laufen. Kontrollieren Sie
nochmals den Lauf der Rotoren. Alle Rotoren sollten gleichmäßig in einer Ebene laufen ohne dass der QuadroCopter
vibriert.
37
Page 38

Falls ein Motor nicht anläuft, schalten Sie die Motoren wieder ab und bewegen Sie den Rotor des nicht angelaufenen
Motors um eine viertel Drehung mit der Hand. Danach starten Sie die Motoren wieder.
Idealerweise erhöhen Sie jetzt die Drehzahl der Rotoren (das Gas) des QuadroCopters langsam, bis Sie ein leichtes
Anheben feststellen können. Testen Sie die Roll- und Nick-Richtung, kurz bevor der QuadroCopter zu schweben
beginnt, um sicherzustellen, dass der Sender richtig eingestellt und keine Kanal-Invertierung (Steuersignale sind
seitenverkehrt) vorhanden ist.
Vermeiden Sie generell hektische und große Steuerbewegungen. Beobachten Sie dabei, ob und ggf. in welche Richtung sich der QuadroCopter bewegt. Mittels Trimmung an der Fernsteuerung können Sie ungewollte Bewegungen
ausgleichen.
Wichtig!
Starten Sie niemals mit einem schlecht getrimmten Fluggerät.
Erhöhen Sie danach das Gas, bis sich der QuadroCopter mindestens einen Meter über dem Boden befindet.
Versuchen Sie eine leichte Drift mit den Trimmhebeln für Gier, Nick oder Roll vorsichtig zu korrigieren.
Sobald sich der QuadroCopter ausreichend in der Luft befindet, nehmen Sie das Gas wieder soweit zurück, bis der
QuadroCopter schwebt.
Nun haben Sie den kritischsten Teil bereits geschafft und können sich mit langsamen und vorsichtigen Steuerbewegungen am Gas mit dem QuadroCopter vertraut machen.
Um den QuadroCopter wieder zu landen, nehmen Sie das Gas etwas zurück, bis der QuadroCopter zu Boden sinkt.
Ein etwas festeres Aufsetzen auf dem Boden stellt dabei kein Problem dar und sollte nicht mit ruckartigen Gasbewegungen korrigiert werden.
Versuchen Sie, möglichst in der Vertikalen zu landen („Hubschrauberlandung“). Vermeiden Sie Landungen mit hohen
horizontalen Geschwindigkeiten („Flugzeuglandung“).
Schalten Sie nach der Landung die Motoren ab (Gasknüppel nach rechts unten drücken).
Üben Sie diesen Startvorgang einige Male, um ein Gefühl für den QuadroCopter zu bekommen. Sobald Sie einigermaßen sicher sind, können Sie beginnen, im Flug mit Gier, Nick und Roll die Richtung zu steuern. Steuern Sie dabei
immer langsam und gefühlvoll und üben Sie die Vorgänge etwas ein, bevor Sie ein neues Flugmanöver angehen. Die
ersten Flüge sollten nicht länger als jeweils 30 bis 60 Sekunden dauern.
38
Page 39

16. Wartung, Pflege und Reparatur
a) Regelmäßige Reinigung
Der QuadroCopter ist ein sehr einfach, aber dennoch durchdacht aufgebautes Fluggerät. Es gibt keine mechanischen
Teile, die einer Schmierung oder sonstigen Wartung bedürfen. Dennoch sollten Sie den QuadroCopter nach jedem
Flugbetrieb von eventuell vorhandenen Verschmutzungen (Grashalme, Staub etc.) reinigen.
Verwenden Sie zur Reinigung ein trockenes oder leicht feuchtes Tuch und vermeiden Sie den Kontakt mit Wasser an
Elektronik, Akku und Motoren.
Fliegen Sie nicht ohne Abdeckungen der Elektronik. Achten Sie darauf, dass keine Feuchtigkeit in das Innere des
Zentralstücks eindringt (z.B. nasse Grashalme etc.). Vermeiden Sie das Fliegen bei Regen!
b) Austausch der Rotoren
Falls ein Rotor durch Absturz oder sonstige Einwirkung beschädigt ist, so sollten Sie diesen umgehend austauschen.
Dies gilt ebenso, wenn Sie feine Risse oder Haarrisse im Rotor feststellen. Aufgrund der hohen Drehzahl können sich
bei beschädigten Rotoren Materialteile ablösen und zu Beschädigung oder Gefährdung der Umgebung führen.
Zum Wechseln eines Rotors entfernen Sie die Rotorspitze mit der Federscheibe und den schadhaften Rotor. Bei der
Montage des neuen Rotors gehen Sie wie unter Kapitel „Endmontage des QuadroCopters“, unter Montage der Rotoren beschrieben vor. Achten Sie dabei auf eine korrekte Wahl des Rotors entsprechend der Drehrichtung des jeweiligen Motors.
Achtung!
Beachten Sie unbedingt die Drehrichtung des jeweiligen Motors und die Wahl des entsprechenden Rotors. Wird dieser falsch gewählt, so ist das Modell nicht flugfähig und es kommt zu Fehlverhalten bei einem
nachfolgenden Start des Modells!
c) Austausch eines Motors
Bei einem schadhaften Motor (Überhitzung, elektrischer Fehler, Lagerschaden oder verbogener Motorwelle) ist es
notwendig, diesen auszutauschen.
Führen Sie dazu folgende Schritte durch:
• Entfernen Sie den Rotor des schadhaften Motors.
• Entfernen Sie die obere Abdeckung und den oberen Teil des Gitterrahmens durch Lösen der oberen Verschraubun-
gen.
Nun haben Sie freien Zugang zu den Motortreibern (Driverboard). Sie können diese auch vorsichtig aus der Halterung ziehen, um mehr Platz zu haben.
• Notieren Sie sich die Farben des Motoranschlusskabels an den Lötpunkten A, B und C und entlöten Sie die Kabel.
• Lösen Sie die Schrauben der Motorhalterung und entfernen Sie den Motor aus dem Motorhalter. Ziehen Sie dabei
das Kabel durch den Ausleger.
• Nehmen Sie den neuen Motor und führen Sie das Anschlusskabel durch den Ausleger.
39
Page 40

• Schrauben Sie den Motor wieder fest und löten Sie die Kabel entsprechend den oben notierten Farben wieder an.
Achtung!
Falls die Farben des Anschlusskabels verwechselt werden, ändert sich die Drehrichtung des Motors. Dies
führt zu einer Fehlfunktion des Modells! Vergleichen Sie sicherheitshalber die Belegung der anderen Motoren
mit der des ausgetauschten Motors.
• Setzen Sie das Driverboard wieder in ihre Halterung ein, kontrollieren Sie den korrekten Sitz des Flachkabels der
Verbindung zur Flight Control und montieren Sie den oberen Teil des Gitterrahmens.
Sollten Sie mehrere Motoren austauschen wollen, so führen Sie die einzelnen Schritte nacheinander für
jeden Motor durch.
d) Austausch eines Auslegers
Bei Beschädigung eines Auslegers kann dieser ausgetauscht werden. Führen Sie dazu die Schritte wie unter „Austausch eines Motors“ durch. Wenn Sie den Motor vom beschädigten Ausleger entfernt haben, dann befestigen Sie
den Motor einfach am neuen Ausleger und vollenden die Schritte wie angegeben.
Entfernen Sie zum Austausch des Auslegers den oberen Teil des Gitterrahmens. Beim Entfernen des Auslegers
drehen Sie diesen leicht und ziehen Sie ihn aus dem Gitterrahmen.
e) Austausch des kompletten Rahmens
Sollte nach einem Absturz einmal mehr zu Bruch gegangen, die Elektronik aber funktionstüchtig sein, so können Sie
den kompletten Rahmen austauschen.
Entfernen Sie dazu einfach die obere und untere Abdeckung und den oberen Teil des Gitterrahmens, danach die
Motoren wie unter Punkt „Austausch eines Motors“ beschrieben und setzen Sie die Motoren in die neuen Ausleger
ein. Die restliche Elektronik (Flight Control und 2x Driverboard) ziehen Sie aus der Halterung und setzen Sie in den
neuen Gitterrahmen ein. Die neuen Ausleger montieren Sie danach in den neuen Gitterrahmen.
40
Eine Ersatzteilliste finden Sie im Internet unter www.conrad.com im Download-Bereich zum jeweiligen
Produkt.
Page 41

17. Entsorgung
a) Allgemein
Elektrische und elektronische Geräte dürfen nicht in den Hausmüll!
Entsorgen Sie das Produkt am Ende seiner Lebensdauer gemäß den geltenden gesetzlichen Vorschriften.
b) Batterien und Akkus
Sie als Endverbraucher sind gesetzlich (Batterieverordnung) zur Rückgabe aller gebrauchten Batterien und Akkus
verpflichtet; eine Entsorgung über den Hausmüll ist untersagt!
Schadstoffhaltige Batterien/Akkus sind mit nebenstehendem Symbol gekennzeichnet, das auf das Verbot
Ihre verbrauchten Batterien/Akkus können Sie unentgeltlich bei den Sammelstellen Ihrer Gemeinde, unseren Filialen
oder überall dort abgeben, wo Batterien/Akkus verkauft werden.
Sie erfüllen damit die gesetzlichen Verpflichtungen und leisten Ihren Beitrag zum Umweltschutz.
der Entsorgung über den Hausmüll hinweist. Die Bezeichnungen für das ausschlaggebende Schwermetall sind: Cd=Cadmium, Hg=Quecksilber, Pb=Blei (Bezeichnung steht auf der Batterie/Akku z.B. unter
dem links abgebildeten Mülltonnen-Symbol).
18. Konformitätserklärung (DOC)
Hiermit erklärt der Hersteller, dass sich dieses Produkt in Übereinstimmung mit den grundlegenden Anforderungen
und den anderen relevanten Vorschriften der Richtlinie 1999/5/EG befindet.
Die Konformitätserklärung zu diesem Produkt finden Sie unter www.conrad.com.
41
Page 42

19. Technische Daten
Abmessungen
Durchmesser ohne Rotoren: ..................................... ca. 450 mm
Gesamthöhe ausgeklappt: ........................................ ca. 165 mm
Gewicht: ..................................................................... ca. 690 g inkl. Akku
Max. Abfluggewicht ................................................... 1000 g (darf nicht überschritten werden!)
Elektrische Daten
Versorgungsspannung: ............................................. 9 - 12 V (3 Zellen LiPo-Akku)
Leistungsdaten
Durchschnittliche Stromaufnahme pro Motor: .......... ca. 3 - 9 A
Max. Strom pro Motor: ............................................... ca. 14 A
Schub pro Motor: ....................................................... max. 700 g
Betriebsumgebung
Betriebsbereich: ........................................................ Innen- und Außenbereich (trocken, kein Niederschlag)
Wind bei Flugbetrieb: ................................................ Kein bis leichter Wind
Umgebungstemperatur: ............................................ +10 °C bis +40 °C
Relative Luftfeuchtigkeit: ........................................... max. 80%, nicht kondensierend
42
Page 43

1. Introduction ........................................................................................................................................................ 45
2. Intended Use ..................................................................................................................................................... 46
3. Explanation of Symbols ..................................................................................................................................... 46
4. Product Description ........................................................................................................................................... 47
5. Scope of Delivery .............................................................................................................................................. 48
6. Safety Information ............................................................................................................................................. 49
7. Notes on Batteries and Rechargeable Batteries .............................................................................................. 52
8. Final Assembly of the QuadroCopter ................................................................................................................54
9. Checking the Configuration ............................................................................................................................... 62
10. Before Each Use ............................................................................................................................................... 69
Table of Contents
a) General Information .................................................................................................................................... 49
b) Before Commissioning ................................................................................................................................50
c) During Operation ......................................................................................................................................... 50
a) Transmitter .................................................................................................................................................. 52
b) Flight Battery ............................................................................................................................................... 53
a) Assembly of the radial arms ........................................................................................................................54
b) Assembly of the Landing Legs .................................................................................................................... 54
c) Assembly of the Rotors ............................................................................................................................... 55
d) Composite Signal Converter ....................................................................................................................... 56
e) Connection to the Receiver .........................................................................................................................57
f) Composite Output Signal ............................................................................................................................ 58
g) LED Status Display ..................................................................................................................................... 59
h) Composite Signal Inverter Commissioning................................................................................................. 60
i) Installing the Flight Battery .......................................................................................................................... 60
j) Assembly of Aerial and Upper Cover Hood ................................................................................................ 61
a) General Information .................................................................................................................................... 62
b) Programming of Transmitter Channels (General) ...................................................................................... 63
c) Programming of „Throttle“ ........................................................................................................................... 64
d) Programming of „Yaw“ ................................................................................................................................ 64
e) Programming of „Pitch“ ............................................................................................................................... 64
f) Programming of „Roll“ ................................................................................................................................. 65
g) Programme Switch for „Agility Mode“ ......................................................................................................... 65
h) Setting the Flight Mode ............................................................................................................................... 66
i) Configuration with PC Software .................................................................................................................. 67
j) Connections and Signal Elements of the Flight Control „QC 09“ ............................................................... 68
k) Possible Flight Modes ................................................................................................................................... 69
a) Checking the Connections .......................................................................................................................... 69
b) Checking Movable Parts ............................................................................................................................. 69
c) Adjustment of the Neutral Position ............................................................................................................. 70
Page
43
Page 44

Page
11. Safety Devices ................................................................................................................................................... 71
a) Motor Protection .......................................................................................................................................... 71
b) Emergency Landing .................................................................................................................................... 71
c) Low Voltage Monitoring............................................................................................................................... 71
12. LED Displays ..................................................................................................................................................... 72
13. Acoustic Signal Encoder Messages .................................................................................................................. 74
14. Information for First Take-Off............................................................................................................................. 75
a) General Handling ........................................................................................................................................ 75
b) Starting the Motor ........................................................................................................................................ 75
c) Cutting the Motor ......................................................................................................................................... 76
d) Hover Flight ................................................................................................................................................. 76
e) Yaw .............................................................................................................................................................. 76
f) Pitch .............................................................................................................................................................77
g) Roll .............................................................................................................................................................. 77
15. The First Flight ................................................................................................................................................... 78
16. Maintenance, Care and Repair ......................................................................................................................... 80
a) Regular Cleaning ........................................................................................................................................ 80
b) Replacing the Rotors................................................................................................................................... 80
c) Replacing a Motor ....................................................................................................................................... 80
d) Replacing a Radial Arm .............................................................................................................................. 81
e) Replacing the Complete Frame .................................................................................................................. 81
17. Disposal ............................................................................................................................................................. 82
a) General Information .................................................................................................................................... 82
b) Batteries and Rechargeable Batteries ........................................................................................................ 82
18. Declaration of Conformity (DOC) ...................................................................................................................... 82
19. Technical Data ...................................................................................................................................................83
44
Page 45

1. Introduction
Dear Customer,
Thank you for purchasing this product.
This product complies with the statutory national and European requirements.
To maintain this status and to ensure safe operation, you as the user must observe these operating instructions!
These operating instructions are part of this product. They contain important notes on
commissioning and handling. Also consider this if you pass on the product to any third party.
Therefore, retain these operating instructions for reference!
All company names and product names are trademarks of their respective owners. All rights reserved.
If there are any technical questions, contact:
Tel. no.: +49 9604 / 40 88 80
Fax. no.: +49 9604 / 40 88 48
E-mail: tkb@conrad.de
Mon. to Thur. 8.00am to 4.30pm, Fri. 8.00am to 2.00pm
45
Page 46

2. Intended Use
The „QuadroCopter 450 ARF QC09“ is a flight model similar to a model helicopter solely designed for private use in
the model making area and the operating times associated with this.
This system is not suitable for other types of use. Any use other than the one described above damages the device.
Moreover, this involves dangers such as short circuit, fire, electric shock, etc. Observe the safety information under all
circumstances!
The product must not become damp or wet.
This product is not a toy and not suitable for children under 14 years of age.
Observe all safety information in these operating instructions. They contain important information on handling
of the product.
You alone are responsible for the safe operation of the model!
3. Explanation of Symbols
The symbol with the exclamation mark points out particular dangers associated with handling, function or
operation.
The „arrow“ symbol indicates special advice and operating information.
46
Page 47

4. Product Description
The electric flight model „QuadroCopter 450 ARF QC09“ is pre-assembled as far as possible. In the professional field,
such flight devices are already used for the most diverse of tasks. The latest micro processor controlled electronics
with position control and acceleration sensor stabilise the QuadroCopter.
The essential differences to the predecessor model „QuadroCopter 450“ (Conrad item no. 208000) are the higherquality sensors in MEMS technology, an „agility mode“ and improved range and control software. Together, the changes
lead to better flight characteristics and enable simple freestyle flight in „agility mode“. Additionally, a composite signal
converter is installed that permits operation with conventional receivers (e.g. of a remote control that is already present).
Additionally, the flight control PCB layout (main PCB QC09) was entirely redesigned to create interfaces and connection
options for future additional modules. Instead of pin strips, the mode is set with DIP switches.
High quality brushless DC motors paired with a specially developed drive enable long and powerful flight operation
while still providing reserve for transporting loads such as cameras, etc. The novel steering and the electronic selfstabilisation result in excellent flight handling characteristics. Different flying programmes ensure that both beginners
and experts will be able to have their fun.
The QuadroCopter can be used both indoors and outdoors. The in-built electronic controls can balance out small
undesired changes to the flight altitude, but cannot remove them completely. The QuadroCopter weighs relatively little
and this is sensitive to wind. Therefore, ideal flying conditions are complete lack of wind to very gentle and even wind.
The lightweight aluminium booms are sturdy and enable excellent flight handling characteristics. The frame is collapsible
and therefore space-saving and easy to transport. The designer frame contains the complete set of electronics and
has space for expansion plates. The grid construction makes for good stability and good protection of the electronics
at a low weight.
Due to its construction, the QuadroCopter is designed for experienced model helicopter pilots who do not just want to
carry out helicopter-like, but also sensational moves.
However, this extremely manoeuvrable model is also suitable for beginners. However, before the first flight, we
recommend that beginners follow an appropriate training program in a flight simulator for helicopters and/or seek
active assistance from an experienced model helicopter pilot.
The model can be expanded by additional electronics (expansion interface available on the control unit) and the
mounting of several mechanisms on the platform mount fixture on the model.
47
Page 48

5. Scope of Delivery
Figure 1
1) Pre-assembled QuadroCopter
2) Four spring washers M3
3) Two left-turning propellers
4) Two right-turning propellers
5) Four rotor tips
6) Hook-and-loop tape
7) Plug-in connector for rechargeable battery
8) Aerial tube
Not illustrated: Operating instructions
The spare parts list is located on our website www.conrad.com in the download section for the respective
product. Alternatively, you may also request the spare parts list on the phone. For contact information,
please refer to the top of these instructions in the chapter „Introduction“.
The following components not included in delivery are required for assembly and operation:
Assembly:
Soldering iron and the necessary kit.
Operation:
To operate the model, a simple 5 channel remote control, a 3 cellular LiPo flight battery with approx. 2500 mAh and a
discharge rate of 25 C as well as a compatible LiPo charging device with LiPo balance charger are required.
You will find tried and tested suitable kit in the QuadroCopter accessories set that is especially designed
for beginners and which can be found in our catalogue or at our website www.conrad.com.
48
Page 49

6. Safety Information
In case of damage caused by non-compliance with these operating instructions, the warranty/
guarantee will expire. We do not assume any liability for consequential damage!
We do not assume any liability for damage to property or personal injury caused by improper use
or the failure to observe the safety instructions! In such cases the warranty/guarantee will expire.
Normal wear and tear and accident and crash damage (e.g. broken rotor blades or chassis parts) are also
excluded from the guarantee and warranty.
Dear customer, these safety instructions are not only for the protection of the product but also for your own
safety and that of other people. Therefore, read this chapter very carefully before taking the product into
operation!
a) General Information
Caution, important note!
Operating the model may cause damage to property and/or individuals. Therefore, make sure that you are
sufficiently insured when using the model, e.g. by taking out private liability insurance. If you already have
private liability insurance, verify whether or not operation of the model is covered by your insurance before
commissioning your model.
Note: In some EU countries, you are required to have insurance for any flying models!
• The unauthorized conversion and/or modification of the product or its components is inadmissible for safety and
approval reasons (CE).
• This product is not a toy and not suitable for children under 14 years of age.
• The product must not become damp or wet. As delicate control electronics are used in the QuadroCopter which are
also sensitive to temperature fluctuations and are optimised for a particular temperature range, operation below
+10 °C is to be avoided.
The product has been designed for operation in an ambient temperature of between +10 °C und +40 °C and under
normal air humidity conditions in Central Europe in dry weather. Operation under different conditions can lead to
changed (material) properties and damage to the product as a result!
• If you do not have sufficient knowledge yet of how to fly remote-controlled helicopters, please contact an experienced
model sportsman or a model construction club. Alternatively, it is recommended that you practice on a suitable flight
simulator before first use.
• Do not leave packaging material unattended. It may become dangerous playing material for children.
• The maximum permissible take-off weight of 1,000 g must not be exceeded. A take-off weight in excess of this could
lead to damage to the rotors during operation and may cause a crash!
• Should questions arise that are not answered by these operating instructions, contact us (for contact information, see
chapter 1) or another expert.
49
Page 50

b) Before Commissioning
• Make sure that no other models are operated on the same channel (transmitter frequency in 35 or 40 MHz remote
controls) within the range of the remote control. For remote controls in the 2.4 GHz-band, check if your remote
control can be operated at the same time as other remote controls in the same frequency band (2.4 GHz) without
interferences. Otherwise, you will lose control of the remote-controlled models!
• Unroll the aerial wire of the receiver on the model to its complete length. Install the aerial in a way that the aerial wire
cannot be caught in any rotating parts. The aerial wire should be inserted into the aerial pipe and the loosely coiled
excess length (e.g. in 35 or 40 MHz remote controls) fixed with transparent adhesive tape to the aerial pipes. Do not
cut the aerial wire off under any circumstances as this will reduce the range of the remote control. Also check the
specifications of the remote control manufacturer.
• Regularly check the functional reliability of your model and the remote control system. Watch out for any visible
damage such as defective plug connections or damaged cables.
• All moving parts of the model must run smoothly, but should not have any play in their bearings.
• Check before each operation the correct and secure position of the rotors.
• Charge the flight battery, which is necessary for operation, as well as the rechargeable battery that may be inserted
in the remote control according the manufacturer’s instructions.
• If batteries are used as a transmitter power supply, make sure that they have sufficient remaining capacity (battery
checker). If the batteries are empty, always replace the complete set, never individual cells only.
• To operate your model, always pull out the telescopic aerial completely as the transmitter (for 35 or 40 MHz remote
controls) would otherwise cover a decisively smaller range and the amplifier of the transmitter would be overloaded
significantly.
• Always switch on the transmitter first. Please ensure that when you turn on the transmitter the throttle control is set
to the lowest setting (motors off)! Then the flight battery of the model may be connected. Otherwise, unexpected
reactions of the model may occur and the rotors might run unintentionally! Risk of injury!
• When the rotors are running, make sure that neither objects nor body parts are in the rotating and suction area of the
rotors.
c) During Operation
• Do not take any risks when operating the model! Your own safety and that of your environment is solely down to you
being responsible when dealing with the model.
• Improper operation may cause serious injury and property damage! Therefore make sure to keep a sufficiently safe
distance to persons, animals or objects during operation.
• Select suitable ground to operate your model.
• Fly your model only if your ability to respond is unrestricted. The influence of tiredness, alcohol or medication can
cause incorrect responses.
• Do not direct your model towards spectators or towards yourself.
• Motor, flight controller and flight battery may heat up during operation of the model. For this reason, please take a
break of 10 to 15 minutes after flying for a maximum of 20 minutes before recharging the flight battery or restarting
with a possible spare battery. The drive motors must have cooled down to ambient temperature.
50
Page 51

• Never switch off the remote control (transmitter) while the model is in use. After landing, always disconnect the flight
battery first or switch off the model. Only then may the remote control be switched off.
• In case of a defect or a malfunction, remove the problem before using the model again.
• Never expose your model or the remote control to direct sunlight or excessive heat for an extended period of time.
• In the case of a severe crash (e.g. from a high altitude). the electric gyro sensors can be damaged and/or misadjusted.
Therefore, full functionality must be tested before flying again without fail! We recommend adjustment to the neutral
position.
• In the event of a crash, the throttle should be immediately reduced to zero. Rotating rotors may be damaged if they
come into contact with obstacles e.g. overcharging. Before flying again, these should be checked for possible tears
or breakages!
• To avoid damage to the QuadroCopter through crashing due to low voltage of the rechargeable battery through total
discharge, we recommend that you respect the low voltage light signals without fail. As the integrated LEDs only
flash in one direction, we also recommend installing the LiPo Saver (Conrad item no. 230327). The LiPo saver
warns you of impending low voltage by light signal. Place the LiPo Saver on the appropriate place of the QuadroCopter.
51
Page 52

7. Notes on Batteries and Rechargeable Batteries
Despite the fact that handling batteries and rechargeable batteries in daily life nowadays is a matter of fact,
there are still numerous dangers and problems involved. For LiPo/Lion rechargeable batteries in particular,
various regulations must be observed under any circumstances due to their high energy content (in
comparison to conventional NiCd or NiMH rechargeable batteries), because otherwise there is danger of
explosion and fire.
The QuadroCopter is delivered without batteries and charging device. Nevertheless, we are including
extensive information on handling batteries for safety reasons. Should you use your own accessories,
please ensure you follow all information enclosed by the respective manufacturer.
a) Transmitter
• Keep batteries/rechargeable batteries out of the reach of children.
• Do not leave any batteries/rechargeable batteries lying around openly. There is a risk of batteries being swallowed
by children or pets. In this case, see a doctor immediately!
• Batteries/rechargeable batteries must never be short-circuited, disassembled or thrown into fire. There is a danger
of explosion!
• Leaking or damaged batteries/rechargeable batteries can cause chemical burns to skin. Wear suitable protective
gloves when handling them.
• Do not recharge normal batteries. There is a risk of fire and explosion! Only charge rechargeable batteries intended
for this purpose. Use suitable battery chargers.
• If the device is not used for an extended period of time (e.g. storage), remove the inserted batteries (or rechargeable
batteries) from the remote control to avoid damage from leaking batteries/rechargeable batteries.
• Recharge the NiCd or NiMH rechargeable batteries about every 3 months, as otherwise there may be a total discharge
due to self-discharge, which renders the rechargeable batteries useless.
• Always replace the entire set of batteries or rechargeable batteries. Never mix fully charged batteries/rechargeable
batteries with partially discharged ones. Always use batteries or rechargeable batteries of the same type and
manufacturer.
• Never mix batteries and rechargeable batteries!
52
Page 53

b) Flight Battery
Attention!
After the flight, the LiPo flight battery must be disconnected from the electronics system of the QuadroCopter. Do not leave the LiPo flight battery connected to the helicopter electronic system when you do not
use it (e.g. during transport or storage). Otherwise the LiPo flight battery may be fully discharged. This
would destroy it and render it unusable! There is also a danger of malfunction due to interferences. The
rotors could start up inadvertently and cause damage or injury.
• Never charge the LiPo flight battery immediately after use. Always leave the LiPo flight battery to cool off first (at
least 10 - 15 minutes).
• To charge LiPo rechargeable batteries, always use a LiPo charger and a LiPo equalizer/balancer.
• Only charge intact and undamaged batteries. If the external insulation of the rechargeable battery is damaged or if
the rechargeable battery is deformed or bloated, it must not be charged. In this case, there is immediate danger of
fire and explosion!
• Never damage the exterior of a LiPo flight battery. Never cut the covering foil. Never stab any LiPo flight batteries
with pointed objects. There is a risk of fire and explosion!
• Remove the LiPo flight battery that is to be charged from the model and place it on a fire-proof support (e.g. a stone
tile). Maintain enough distance from flammable objects.
• As the charger and the rechargeable LiPo flight battery both heat up during the charging procedure, it is necessary
to ensure sufficient ventilation. Never cover the charger or the LiPo flight battery!
• Never leave LiPo batteries unattended while charging them.
• Disconnect the LiPo flight battery from the charger when it is fully charged.
• Chargers may only be operated in dry rooms. The charger and the LiPo flight battery must not get damp or wet.
With chargers operated via mains voltage, there is a danger of potentially fatal electric shock! There is also
the risk of fire or explosion by the rechargeable battery. Rechargeable LiPo batteries in particular are very
susceptible to moisture due to the chemicals they contain! Do not expose the charger or LiPo flight battery
to high/low temperatures or to direct solar radiation. When handling LiPo batteries, observe the special
safety information of the battery manufacturer!
53
Page 54

8. Final Assembly of the QuadroCopter
a) Assembly of the radial arms
The model is delivered in flat-pack form. Firstly, click
the four radial arms (1) into flying position. Then
push the clips on the central frame (2) slightly apart
from one another and click the radial arms upwards
(definite clicking into place noticeable).
Should you wish to dismantle the radial arms again
for transportation, you should push the clips on the
central frame slightly apart from one another to
avoid tearing.
Should you not wish to dismantle the
radial arms again for transportation, you
can also permanently affix these using
superglue or cable clips.
Figure 2
b) Assembly of the landing legs
Extend the landing legs (1) into flying position. The
retaining clips (2) must catch clearly noticeably in
the slots (3).
For folding in, slightly push the retaining clips (2)
into the slots (3) with a small screw driver in order
to avoid breaking the plastic parts.
A red direction indicator is mounted to one of the
landing legs. This direction indicator should always
be considered as „forwards“ when flying.
54
Figure 3
In harder landings, the landing legs will fold in. This is normally expected by us. Should you wish to avoid
this effect or if you no longer wish to fold away the landing legs for transportation, you can also permanently
affix the landing legs using superglue.
Page 55

c) Assembly of the rotors
The rotating direction of the rotors can be seen in figure 4 (bird’s eye view). The position of the red direction indicator
on the landing leg and the arrow on the radial arm is to be used as the indication for the direction of the model and is
deemed to be „in front“.
Attention!
As the motors are pre-assembled, the
rotating direction of the rotors on the
basis of the flight direction should be
carefully observed (figure 4)!
The rotors in the centre line (1) turn
clockwise (right rotating) and must be
marked with the inscription „right“.
The rotors on the cross axis (2) turn
anticlockwise (left rotating) and must be
marked with the inscription „left“.
Attention!
If the rotors are not installed as described, the programmed rotating directions will no longer be in line with
the rotating directions of the rotors. The QuadroCopter is therefore no longer able to fly and can no longer
be operated!
Rotors and motor shafts are provided with a hexagonal bolt (3).
Place the rotors (1) on the motor shafts (3) so that
they lock into place in the hexagonal bolt.
Now insert one of the provided spring washers (4)
at a time between the rotor and rotor tip (5), as
otherwise the rotors may become loose during
flight.
Screw the rotor tops to the motor shafts manually.
Attention!
Tightening the screws too much can damage the motors. The shafts may tear or be pulled from the
bearings. The motors operate sluggishly, which may have a negative effect on the flight characteristics.
Therefore, please verify that all of the rotors can turn easily after tightening the rotors. The snap ring shown
in figure 5, item 6, on the underside of the motors must be able to move and must not jam.
Please ensure before each operation that the rotors are firmly screwed in place on the motors. It is
recommended that you are careful when handling work tools.
Figure 4
Figure 5
55
Page 56

d) Composite Signal Converter
With a common receiver, a separate control signal is generated for each servo and sent to the respective servo plug
contact at the receiver. The composite signal converter reassembles the different servo impulses and outputs them as
a serial composite signal. Up to 8 channels can be used for formation of the composite signal.
The receiver can be supplied with 5 V/DC by the composite signal converter. No additional voltage supply is required
for use in the „QuadroCopter“.
The remote control receiver is connected to the „ST3“ connection socket of the composite signal converter „QC07“. A
suitable connection cable for this is supplied with the composite signal converter.
The connection socket „ST3“ has 10 contacts that are numbered from the right to the left. Contact 10 is on the left,
contact 1 on the right.
The composite signal converter „QC07“ has the following connection contacts:
C3
R17
U1
TP3
TP8
Q1
C7
TP7
R5
R1 R9 R13
R2 R10 R14
R6
TP2
TP1
C1
R3
R4
R7
R8
ST2
C6
R11 R15
ST3
R12
R16
ST1
5
6
1
2
LED2
C5
R20
R19
C4
C2
R18
R21
LED1
TP4
LED1: Green LED indicator
LED2: Red LED indicator
ST3: Connection sockets for the receiver cable
ST2: Connection contacts for the composite signal
ST1: Programming plug for production-related settings
For a detailed description of the different contacts and the connection options, see the following sections.
56
Figure 6
Page 57

e) Connection to the Receiver
Connect the connection cable for the receiver connection to the socket „ST3“ of the composite signal converter. The
connection sockets 1 - 10 of the cable are intended for the receiver connection.
The contacts of the connection cable are assigned as follows:
Contact 10 = Channel 1
Contact 9 = Channel 2
Contact 8 = Channel 3
Contact 7 = Channel 4
Contact 6 = Channel 5
Contact 5 = Channel 6
Contact 4 = Channel 7
Contact 3 = Channel 8
Contact 2 = GND/Minus (-)
Contact 1 = 5 V/Plus (+)
The signals of the 8 inputs (channels 1 - 8) are measured and processed by the composite signal converter. All
available signals are combined into a composite signal pursuant to the specifications for RC remote control systems
(pulse width between 1 ms and 2 ms). Due to measuring of the signals and signal processing, there will be a delay of
one frame length. However, this has no effect during operation and is therefore only mentioned for the same of
completeness.
The measured servo signals may appear in any order, parallel, in sequence or overlapping. There is no limitation, so
that the composite signal converter can be used for all common systems. A synch break between the different signals
is also not required.
Important!
Observe that the composite signal converter inputs are assigned without gaps!
In a 6-channel system, this means inputs 1 - 6 must be used rather than, e.g., 1 - 4 and then 6 - 7. With this
assignment, the electronics would not recognise channels 6 and 7!
R9 R13
10
R10 R14
C1
R3
R4
R7
R8
ST2
C6
R11 R15
ST3
R12
1
5
6
R16
ST1
1
2
Figure 7
57
Page 58

f) Composite Signal Output
The composite signal converter outputs the formed
composite signal („SuS“) at the left contact of the
„ST2“ connection.
This composite signal consists of so many single
signals as measured at the inputs.
For example, if a 6-channel receiver is used, the
composite signal also has 6 channels. Channel
number recognition is performed via the valid signal
measurement at the inputs.
Connect the three-pole composite signal cable to
the connection „ST2“ (see figure 8a). The impulse
line (mark at the cable) must be connected to the
left contact of the „ST2“ plug.
The connections „SuS“, „+5V“ and „GND“ must be
connected to the respective connections of the main
PCB (figure 8b) in the QuadroCopter. Ensure
correct polarity for the connection of the two pin
contact strips!
R9 R13
R10 R14
SuS
C1
R3
+5V
R7
R4
R8
ST2
C6
GND
R11 R15
ST3
R12
R16
ST1
5
6
1
2
Figure 8a
58
Figure 8b
Page 59

g) LED Status Display
The composite signal converter has a green and a
red LED for status display.
LED2
LED1
A green LED („LED1“) indicates that the electronics
are in normal operation. This means that servo
signals can be measured, and if required a
composite signal can be generated. When the
greed LED goes out, there is a basic interference
C5
R18
R21
TP4
LED2
Rot
in the electronics.
A red LED („LED2“) shows that no servo signals
are present. The reasons fort his may be reception
interference, lack of power supply to the receiver ,
R20
R19
switched-off transmitter of contact errors in the
connection lines.
C4
C2
Behaviour in case of reception interferences
The composite signal converter measures the signal quality and thus also recognises reception interferences. Since
channels 1 - 4 are mainly used for general control of models, they are specifically described.
Interferences on channels 1 - 4
For these channels, verification of a valid pulse width (between 1 and 2 ms) is performed. If an error is recognised, the
composite signal is generated with the last valid value. When the error rate exceeds the measure for proper reception,
the composite signal converter does not output any composite signal anymore and activates the red LED. Now the
reception problem can be recognised by the downstream logic and no reception problems are concealed. If the input
signal is valid again, the red LED goes out and a composite signal is generated.
Interferences on channels 5 - 8
If the reception interference only acts on channels 5 - 8, a composite signal continues to be generated for channels
1 - 4 and channels 5 - 8 are output with an invalid pulse length. Thus, it is possible to continue to control the model, but
the interference can be recognised by a downstream logic at channels 5 - 8. When the input signal is valid again, a
regular composite signal is output.
C3
R17
LED1
Rot
U1
TP3
TP8
Q1
C7
TP7
R5
R6
R1 R9
R2
TP2
TP1
R10
Figure 9
C
59
Page 60

h) Composite Signal Converter Commissioning
When the composite signal converter is connected to the receiver and the composite signal cable of the QuadroCopter, you have to programme the channel assignment of the remote control in the QuadroCopter. The precise
approach can be taken from these operating instructions, chapter „Checking the Configuration“.
i) Installing the Flight Battery
The flight battery is not included but must be ordered separately.
Take the following steps to install the flight battery:
Solder the supplied, high power loading system (figure 1, item 7) to the connecting cable of the rechargeable battery.
Always ensure correct polarity.
The red electronics system cable of the QuadroCopter must be connected to the positive cable of the rechargeable
battery and the black cable to the negative cable of the rechargeable battery.
Install the rechargeable battery (1) in the grid frame
(2) and attach it with Velcro (3).
in addition to the shown Velcro, also attach a strip
of Velcro to the surface of the battery (4, see also
figure 1, item 6), to prevent slipping forwards or
backwards.
The connecting cables can also be fixed under the
Velcro (3) as shown in the figure.
Figure 10
The rechargeable battery must be placed in the centre so that the QuadroCopter is not tail-heavy, topheavy or side-heavy.
The QuadroCopter’s electronics system has a safety device to prevent inadvertent engine start-up. When contact is
made with the rechargeable battery although the transmitter is not switched on or the speed/pitch control stick was not
set to zero, the control electronics in the model will not cause the engines to start. When the transmitter is switched on
and the speed/pitch control stick is set to zero once, the control electronics in the model clears normal operating state.
Attention!
To prevent inadvertent engine start-up if the safety device fails, the transmitter should be switched on. The
speed/pitch control stick must be set to zero so that no acceleration command is sent.
60
Page 61

j) Assembly of Aerial and Upper Cover Hood
Roll out the aerial cable of the integrated receiver
entirely and carry this through the supplied aerial
pipe (1).
Then place the aerial pipe from top to bottom in
the designated clamp (2). Do not press the aerial
pipe from the side into the clamp, otherwise this
may break!
You can then loosely wrap the overhanging cable
along the outside of the aerial pipe and fasten the
end with adhesive tape in 35 or 40 MHz receivers.
Please ensure that the aerial cable in the electronics
system does not form a loop or knot as this can
impair the operating range!
Attention!
Under no circumstances must the aerial wire become loose or be in slewing range of the rotors. Otherwise,
the aerial wire may be unintentionally shortened or block one of the rotors. In both cases there is a risk of
crashing for the model.
Should you wish to retrofit your QuadroCopter with a remote control with 2.4 GHz, this step is not applicable
due to the short aerial.
Due to the position of the aerial pipe and the predrilled hole in the upper hood, the hood can only
be mounted in one position.
For mounting the upper hood, please use the
supplied elastic bands.
Thread a radial arm through the band, tense this in
a longitudinal direction over the enclosure and then
fix it to the clasp of the plastic frame.
For safety reasons, please always use two elastic
bands oppositely.
Figure 11a
Figure 11b
61
Page 62

9. Checking the Configuration
a) General Information
Please carry out the configuration of the QuadroCopter as described. Programming of the channels is essential, since
otherwise the QuadroCopter will not recognise your transmitting equipment. When you have carried this out, your
QuadroCopter is ready to fly.
If you are using a computer remote control, programme it without using a mixer in the standard wing program! To
correctly align the pilot stick for the desired control commands, it is necessary to familiarise the QuadroCopter with the
used transmitter.
In the process, the QuadroCopter’s electronics system memorises which channel which control command broadcasts.
Generally, you can freely choose the configuration of the control lever (according to your habits), however, it is
recommended that beginners follow the recommended examples.
Ex factory, the QuadroCopter is configured to mode 2. The examples are for a common assignment used by many
model pilots. Decide which configuration you wish to program and carry out the familiarisation of the channels
correspondingly. Further possibilities for control mode 1, 3 or 4 can be found in the instructions in this chapter under
the heading „possible control modes“. The standard transmitter illustrated in this chapter is not part of the delivery and
is just as suitable for operation as a computer transmitter.
For monitoring the configuration, indicating malfunction or operating status, a red and a green LED are installed on the
flight control „QC09“. The respective indications can be seen in the following chapters 11 and 12 of these instructions.
When using multiplex remote controls, the servo protocols must be adapted for all four functions (throttle,
roll, pitch and yaw) from „MPX“ to „UNI“.
62
Page 63

b) Programming of Transmitter Channels (General)
Before you begin programming, unplug the rechargeable battery, if connected, from the QuadroCopter. Also disconnect
the connection cable to the PC, if connected, from the QuadroCopter.
The desired modes are set with the DIP switches 1 - 6 (also see figure 17). Switch the corresponding switch to „ON“ for
this.
The following switch assignments are possible:
1 Parameter „Sport-Mode“
2 Parameter „User-Mode“
3 Bootloader mode
4 RC confirmation mode
5 No function
6 No function
To programme the remote control, set the DIP switch 4 to „ON“.
Independently of what remote control mode (mode 1 - 4, also see chapter „Possible remote control modes“)
you want to teach in you have to observe the following order of channel assignment and the signals of the
red LED „LED2“.
During the programming process, please ensure that you only move the required lever, otherwise the
setting will not be recognised!
Switch on your transmitter now. Please ensure that all levers and trims of the transmitter are in neutral position. The
examples given show the procedure using a remote control in mode 2. If you prefer to use another mode, the used
axes may differ (see chapter „Possible Flight Modes“)!
Please also ensure that the slider for the trim is set to neutral position! Otherwise correct recognition of the channels
will not be possible! Please also ensure that lever movements are made in the right direction, otherwise the signals will
be memorised in reverse! Computer remote controls should always be operated without mixer!
Move the throttle lever (see figure 12) backwards
to the neutral position (motor off), all other control
devices should be set to neutral.
Do you want to try out „pitch reverse“ (during „motor
off“ the pilot stick for throttle is pulled away from
the body), then bring the throttle lever forwards into
the max. position before you connect the
rechargeable battery.
Figure 12
63
Page 64

c) Programming of „Throttle“
Connect the charged battery to the QuadroCopter. The model starts with a self-test and directly continues with
programming of the channels. On the basis of the throttle setting, the QuadroCopter automatically recognises which
channel you would like to use for the throttle.
The red „LED2“ briefly flashes during initialisation as confirmation.
d) Programming of „Yaw“
Now move the yaw lever (see figure 13) to the left
to full deflection and hold it there for at least one
second.
The QuadroCopter thus recognises the YAW
channel and memorises this.
Move the YAW lever back to neutral position with
the THROTTLE still on zero.
As confirmation, the QuadroCopter’s red LED
flashes in a cycle of 2 (2x short flashes, then a pause, etc.).
During the respective configuration
step, the green LED shows the channel
as long as the lever is still being
pushed! However, only the red LED is
important for the progress indicator!
During the programming process, please ensure that you only move the required lever, otherwise the setting will not
be recognised!
Figure 13
e) Programming of „Pitch“
Move the PITCH lever (see figure 14) to full
deflection for GIVE PITCH upwards and hold it
there for at least one second.
The QuadroCopter thus recognises the PITCH
channel and memorises this. Move the PITCH lever
back to neutral position, continue to leave the
THROTTLE on zero.
As confirmation, the QuadroCopter’s red LED2
flashes in a cycle of 3 (3x short flashes, then a pause, etc.).
64
Figure 14
Page 65

f) Programming of „Roll“
Move the ROLL lever (see figure 15) to full
deflection for ROLL LEFT and hold it there for at
least one second.
The QuadroCopter thus recognises the ROLL
channel and memorises this. Move the ROLL lever
back to neutral position with the THROTTLE still
on zero.
As confirmation, the QuadroCopter’s red LED
flashes in a cycle of 4 (4x short flashes, then a pause, etc.).
g) Programme Switch for „Agility Mode“
The installed Flight Control „QC 09“ has high-quality MEMS sensors installed for flight position stabilisation.
This leads to relatively easy to control flight characteristics similar to those of a coax helicopter.
The QuadroCopter agility is limited by these sensors, however. Activating the „agility mode“ function limits
the Flight Control sensors in their functions. The QuadroCopter can be controlled much more agile around
all axes in this mode. The flight characteristics are now closer to those of a helicopter. Simple freestyle
flight (looping, rolls) is possible as well.
The flight characteristics with active „Agility mode“ function are not suitable for beginners. If you do not
have sufficient flight experience with QuadroCopters and/or helicopters, we recommend performing the
first flights with active „agility mode“ with appropriate care. The „agility mode“ function is not possible in
beginner or sport mode, but in user mode only.
To programme channel 5 to activate „agility mode“,
a switch at the remote control transmitter (figure
16) must be operated twice (on - off).
When teaching in channel 5, the last position of
the taught-in switch means that the „agility mode“
function is deactivated in this switch position.
As confirmation, the QuadroCopter’s red LED goes
off and the green LED is lit permanently.
This is the end of the teaching process.
Figure 15
Figure 16
65
Page 66

Disconnect the rechargeable battery from the QuadroCopter and switch DIP switch 4 to „OFF“ again.
Other DIP switches already set (e.g. 1 = Sport-Mode) can be left as they are. This is the end of the programming
process for the channels.
Important!
If you do not teach in a switching channel for „agility mode“ within five seconds of teaching in the roll
function, the RC configuration is interrupted automatically. In this case, LED1 (green LED) is permanently
lit, but the „agility mode“ is not available.
If you want to teach in the function „Agility mode“, you have to start the teaching process again. The
remote control transmitter switch may act on any receiver channel but must not be channel 1 - 4 or influence
these channels by mixers. Check the switch effectiveness in computer remote control transmitters with a
servo (e.g. connect to a receiver) or a suitable transmitter display.
No path limitation, dual rate, expositional or other mixers must be programmed on the switching channel
for „agility mode“. The taught-in channels can be monitored via serial status messages in the QuadroCopter configuration kit or another serial terminal during the teaching stage.
If channel 5 is not taught in or a remote control with only 4 channels is used, the „agility mode“ function is permanently
deactivated.
Also observe the following notes in chapters „Agility Mode Function“ and „The First Flight“.
h) Setting the Flight Mode
The QuadroCopter offers three different flight modes:
• Beginner mode (suitable for novices)
• Sport mode (suitable for proficient QuadroCopter pilots; lower axis limits and higher dynamics)
• User mode (flight parameters adjustable with PC software, see chapter configuration with PC software)
The desired modes are set with the DIP switches 1 and 2 (also see figure 17). Switch the corresponding switch to „ON“
for this. The following switch assignments are possible:
DIP switch 1: „Sport-Mode“
DIP switch 2: „User-Mode“
If the DIP switches 1 and 2 are not active (position „OFF“), „Beginner“ mode is active.
If parameters are changed in user mode with the QuadroCopter configuration kit, they are stored in the
parameter set „User“. If parameters are changed in the parameter set „Beginner mode“ (or „Sport mode“),
these changes are accepted and also stored in the parameter set „user“. The old parameter set for „User
mode“ is overwritten.
If the DIP switch 2 is not set in „User mode“ (switch 2 not set to „ON“), the started beginner (or sport)
parameters are loaded again after reset (e.g. after battery change).
66
Page 67

Practical advice:
Beginners in particular are urgently advised to reduce the directness of the control command with which the QuadroCopter performs the commands from the remote control around the centre detent (negative exponential or „expo“).
To illustrate:
Normally, the QuadroCopter responds linearly. This means that the pilot stick deflection and the reaction are synchronous.
With negative expo, the QuadroCopter will respond relatively sluggishly at the start of the controlling motion. In the
case of stronger control deflections, however, it responds much more strongly to the control command. This is particularly
beneficial for beginners who initially tend to oversteer, i.e. move the control stick of the remote control more intensely
than necessary. This effect is, of course, only desired for the three control axes (roll, pitch and yaw) and not, however,
for throttle. Observe: Do not configure expo on throttle.
In other words: With negative expo, slow behaviour of the flying device is achieved on the controlling motions in the
area of the centre detent of the pilot stick. This takes place either via the optionally available software, via the
QuadroCopter’s switches (see „beginner mode“) or via the existing „expo function“ of the remote control. Only
computerised remote controls can set „expo“. However, care must be taken, since the higher the negative expo
selected, the more aggressively the QuadroCopter reacts when the control stick is moved in the area of full deflection.
For the „user“ flight mode, you must configure your own setting with the optionally available configuration
software. For this, you can use either the beginner or sport modes as a basis and customise your own
personal requirements. Please observe the operating instructions for the configuration sets.
i) Configuration with PC Software
To fly the QuadroCopter with your own settings, you may connect the electronics system of the QuadroCopter to a PC
via an interface cable (serial TTL on USB).
An optional PC configuration set is available for this. This contains a connection cable, a detailed description and the
software on CD. This kit may be used with Microsoft® Windows XP®*, Windows Vista®* and Windows 7®* (* Microsoft, Windows XP, Windows Vista and Windows 7 are registered trademarks of the Microsoft Cooperation in the U.S.
and other countries).
As it is not necessary to carry out configuration with a PC for normal flight operation, this is only mentioned here as a
side note.
When the DIP switch 3 is set to „ON“, the QuadroCopter is in PC configuration mode (PC mode) and cannot be flown.
For more information on the configuration of the connection to the Flight Control „QC 09“ and the programming, see
the software’s operating instructions.
In PC mode (also called „Bootloader operation“), the green „LED1“ must flash continually at approx. 1 Hz. The red
„LED2“ flashes at a quick, irregular rhythm during communication with the computer.
67
Page 68

j) Connections and Signal Elements of the Flight Control „QC 09“
1 X5 Interface to the expansion boards
2 X2 Interface to the motor drivers
3 SW1 DIP switches 1-6 for mode changing
4 X6 / X7 No function
5 X3 No function
6 X10 Serial interface for programming and status message output
7 X9 Second serial interface for external control commands (up-to-date information on this are available in
8 X4 No function
9 X11 No function
10 Buzzer Signal encoder
11 LED1 Green LED
12 LED2 Red LED
13 X1 Interface to the motor drivers
14 X8 Composite signal input
the download centre at www.conrad.com)
68
Figure 17
Page 69

k) Possible Flight Modes
Mode Throttle Yaw Pitch Roll
1
2
3
4
10. Before Each Use
a) Checking the Connections
Check all screws for tightness before transport and flights. Vibrations at transport and during flight may cause screws
to loosen. Due to this, you need to conduct a thorough pre-flight check just as for a real helicopter.
b) Checking Movable Parts
Always check all movable parts and all parts with bearings for unobstructed movement before flying. They must be
easy to move, but without play.
69
Page 70

c) Adjustment of the Neutral Position
For the stabilisation of the QuadroCopter to work correctly, the neutral position must be set. This is the position that the
QuadroCopter tries to stabilise as long as no other flying manoeuvre is desired.
Proceed in the following sequence:
1) Switch on the transmitter.
2) Set THROTTLE to zero and all other levers and trims to the neutral position.
3) Place the QuadroCopter on a level, even surface.
4) Connect the rechargeable battery to the QuadroCopter.
5) The QuadroCopter’s red LED must be off and the green LED must be lit.
6) Move THROTTLE to full deflection and YAW
to full deflection on the right (figure 18).
Figure 18
7) The QuadroCopter’s green LED flashes as confirmation and the neutral position is memorised.
8) Move the THROTTLE back to 0, move YAW, PITCH, and ROLL into the neutral position.
9) The red LED is off and the green LED must be lit. Now your QuadroCopter is ready to start.
If you do not set the neutral position, the QuadroCopter will use either the factory settings or the last saved value!
It is very important that you set the neutral position of the QuadroCopter as precisely as possible. For this,
it is necessary to set the neutral position on a completely horizontal base. Ideally, this should be measured
with a spirit level.
It is therefore urgently recommended that you set the neutral position before first flight. Due to different environmental
conditions than in the factory and/or at the actual place of flight operation, the factory setting may not be ideal!
If the QuadroCopter still swerves in one direction despite the relevant trims to the transmitter, the neutral position must
be stored again by slightly lifting up the QuadroCopter on the side to which it swerves. This way, the (changed) position
is saved as the new centre position.
70
Page 71

11. Safety Devices
The QuadroCopter has a range of safety devices which protect the model from damage and/or should reduce possible
damage to a minimum. The protection mechanisms are identified by LED indicators. Also see the next chapter 12.
a) Motor Protection
The control electronics has a motor protection which immediately switches off all motors if one rotor is blocked (e.g.
after a crash). After possible damage has been checked for, the motors can be restarted using the normal control
command „starting the motors“.
b) Emergency Landing
If the control electronics of the QuadroCopter detects too great interferences, it tries to realign the QuadroCopter in a
level position.
If interference of the receiver continues, the throttle is set to a value just under hovering (without rear weight) and the
QuadroCopter begins its descent.
When the interference of the receiver is over, the model pilot can give another control command and the emergency
landing programme is terminated.
c) Low Voltage Monitoring
The QuadroCopter constantly monitors the voltage of the connected battery. If it falls below a critical level over a
particular period of time, this will be indicated by the LEDs.
In this case, the red LED flashes and the green LED will be permanently lit. This indicator can only be switched off by
disconnecting the battery.
In order to detect a low rechargeable battery during flight, it is recommended that strong throttle thrusts be carried out
from time to time. If the QuadroCopter responds slowly and weakly, it should be landed and the rechargeable battery
should be checked. Due to the performance, this test is, however, difficult to realize.
In the case of a long, uninterrupted flight operation, it is recommended to also test the LED indictors through time to
time landing!
Practical advice:
To avoid damage to the QuadroCopter from crashing due to undervoltage and/or to the rechargeable battery due to
total discharge, we recommend that you always observe the low voltage light signals. As the integrated LEDs only
flash in one direction, we also recommend installing the LiPo Saver (Conrad item no. 230327). The LiPo saver warns
you of impending low voltage by light signal. Place the LiPo Saver on the appropriate position on the QuadroCopter
and connect it to the battery via, e.g., the balancing connector.
71
Page 72

12. LED Displays
If the flight control determines any malfunctions during self-test, motor start or in flight, these functional problems are
visually indicated via the LED displays of „LED1“ and „LED2“. The following LED codes are possible:
Normal operation:
Initialisation Red and green on permanently
Initialising OK, not started Green on, red off
Motor on, throttle to low Red on, green flashes slowly (2 Hz)
Flight operation Red on, green on
Emergency landing (*) Red and green flash slowly in time (2 Hz)
Neutral position reconciliation Red off, green flashes quickly (8 Hz)
Radio loss (*) Red and green flash slowly in counter-time (2 Hz)
Throttle not in the bottom-most position (*) Red and green flash quickly counter-time (10 Hz)
Low-Bat level 1 and 2 (*) Green on, red flashes quickly (8 Hz)
Motor error (*) Green off, red flashes 2x brief, brief break
LED displays marked (*) are safety displays. The causes for the these must be explored and resolved!
Radio loss (impaired radio connection)
Possible causes: Receiver crystal has fallen from the socket; receiver crystal defective; receiver aerial broken; receiver
has lost „binding“ and must be newly „bound“; receiver aerial not extended; second receiver with same transmission
channel active; batteries/rechargeable batteries of the transmitter flat.
Check the possible cause and try starting again.
If there is any permanent radio interference during flight, the QuadroCopter will start an emergency landing and the
LEDs will also indicate an impaired radio link here by flashing.
Emergency charging function
During operation, a permanent radio interference prevails. The QuadroCopter starts an emergency landing
independently. The red and green LEDs flash slowly and simultaneously. Observe the section „Radio outage“ and find
the cause.
If you control the QuadroCopter with a computer remote control with integrated failsafe function, the failsafe
must be deactivated. If the failsafe cannot be deactivated entirely, the flight control will recognise the
failsafe signal as a control signal. This will prevent the flight control from initiating emergency landing
function contrary to the information of the operating instructions. Signal encoder and LED displays also will
not react as shown in the operating instructions. In this case., we recommend to try and determine a
suitable throttle position in failsafe operation that will initiate „gentle“ landing by the corresponding throttle
control.
72
Page 73

Undervoltage recognition
The battery voltage is permanently monitored. If a certain battery voltage is exceeded (threshold approx. 9.4 V), the
red LED starts to flash quickly. The green LED is permanently lit. This indicator can only be reset by disconnecting the
flight battery. If the red LED flashes, you should carry out a landing as quickly as possible and adjust the flight operation.
If the QuadroCopter is connected to a non-fully charged battery, this can also lead to undervoltage detection
and the motors do not start. In this case, fully charge the flight battery first of all and then try the take-off
once again.
If the charging end voltage of the battery is reached, the red LED „LED2“ will flash at a quick rhythm. At the same time,
the signal encoder will start emitting sounds at a slow rhythm. Land at once when you notice these signals. If you
ignore these signals, the battery will be discharged further and the signal encoder will start emitting warning sounds at
a quick rhythm. If the alarm signals are still ignored the flight control will switch off the motors when the battery drops
below a specified voltage. The QuadroCopter will crash. Loss of guarantee/warranty!
Motor error
The electronic system finds an error in one or several motors. Check the connection cables of the motors for cable
breaks and good soldering to the motor driver PCBs. Ensure that the rotors are running smoothly. For this, observe the
notes in the chapters „Assembly of the Rotors“ and „Maintenance, Care and Repair“.
The interferences shown are usually not permanent but have been caused by temporary causes.
Disconnection of the battery generates a reset that usually eliminates the error. The cause for permanent
interferences must be found. For visual indications of the LEDs, also observe all notes described in chapter
13.
73
Page 74

13. Acoustic Signal Encoder Messages
If the flight control determines any malfunctions during self-test, motor start or in flight, these functional problems are
acoustically indicated via the signal encoder. The following codes are possible:
Error Sound signal
Gyro error at zero reconciliation roll 1 x brief, then 1 s break
Gyro error at zero reconciliation pitch 2 x brief, then 1 s break
Gyro error at zero reconciliation yaw 3 x brief, then 1 s break
Motor error front 1 x long , 1x brief beep, then 1 s break
Motor error rear 1 x long , 2x brief, then 1 s break
Motor error right 1 x long , 3x brief, then 1 s break
Motor error left 1 x long , 4x brief, then 1 s break
Emergency landing Permanent sound
Undervoltage level 1 1 Hz (slow sound sequence)
Undervoltage level 2 2.5 Hz (quick sound sequence)
Signalling readiness for flight 1 x brief (0.5 s)
Signalling zero reconciliation 1 x brief (0.5 s)
Signalling motor start 1 x brief (0.5 s)
Signalling motor stop 1 x brief (0.5 s)
The interferences shown are usually not permanent but have been caused by temporary causes.
Disconnection of the battery generates a „Reset“ that usually eliminates the error. The cause for permanent interferences must be found. Also observe all notes described in these operating instructions, item
„LED displays“ in acoustic messages of the signal encoder.
74
Page 75

14. Information for First Take-Off
a) General Handling
A QuadroCopter is essentially equipped with the handling of a normal helicopter. The differences, however, are in the
detail. For helicopters, the torque balance is stabilised by special gyros (in the yaw function). For this, there are two
different systems: „Normal gyros“ or gyros with the „heading lock“ function.
Normal gyros stabilise (cushion) the tail rotor against tipping motions which are caused by the pilots (driving speed
and/or pitch changes and/or external influences (e.g. side wind). A gyro with „heading lock“ function has a holding
action against these tipping motions. Both systems respond to a control command - e.g. „yaw to the left“ and subsequent neutral positioning with the immediate stopping of the tipping motion.
In your QuadroCopter - unlike in standard helicopters - there are three gyros installed for the yaw, pitch and roll
functions. The installed gyros are - in comparison with standard gyros - neither to be described as „normal gyros“ nor
with „heading lock“ function.
The gyros in the QuadroCopter are linked together so that after the end of a control command the QuadroCopter
always attempts to reach neutral position (hovering flight). Of course, how well this works depends on the space
available, the flight speed and/or the prevailing flight condition, the trim values of the QuadroCopter and external flight
conditions e.g. wind.
The flight control „QC 09“ installed in the QuadroCopter has high-quality MEMS sensors installed. This leads to
relatively easy to control flight characteristics similar to those of a coax helicopter.
The QuadroCopter agility is limited by these sensors, however. Activating the „agility mode“ function limits the Flight
Control sensors in their functions. The QuadroCopter can be controlled much more agile around all axes in this mode.
The flight characteristics are now closer to those of a helicopter. Simple freestyle flight (looping, rolls) is possible as
well.
The flight characteristics with active „Agility mode“ function are not suitable for beginners. If you do not have sufficient
flight experience with QuadroCopters and/or helicopters, we recommend performing the first flights with active „agility
mode“ with appropriate care.
b) Starting the Motor
• LEDs indicate „Ready to Fly“
• THROTTLE to zero, YAW to full deflection to the left, PITCH and ROLL to neutral (also see figure 12)
• Rotors start to turn and start idle speed
• Red LED lights permanently and the green LED flashes („motors on“)
• Increase THROTTLE slowly for lift-off (hovering flight)
75
Page 76

c) Cutting the Motor
The running motors can be turned off as follows:
• THROTTLE to zero, YAW to full deflection to the right, PITCH and ROLL to neutral
• Stop rotors
• Red LED is off, green LED is permanently lit („ready to fly“)
d) Hover Flight
For a simpler and consistent explanation of steering , classic terminology is used here as well. This comes
from flight language and is widely used.
Directional descriptions are always to be interpreted from the perspective of a „virtual“ pilot in the model. The direction
indicators on the landing leg are deemed to be „in front“. The explanations are all based on configuration of the remote
control to mode 2.
Hovering denotes a flight status in which the QuadroCopter neither rises nor falls so that the upwards directed uplift
force is equal to the downwards directed weight. This is achieved approximately in mid throttle setting (but independent of a possible payload).
During flight close above the ground and during take-off, turbulence and air flow can be experienced which
may affect the QuadroCopter. A quicker response to the controlling motions and slight swerving of the
QuadroCopter forwards, backwards or to the side may result from this. From a height of about one meter,
this effect is no longer noticeable. The QuadroCopter can now be controlled more easily and more precisely.
e) Yaw
Yaw denotes the rotation of the QuadroCopter
around the yaw axis (vertical axis).
This movement either occurs unintentionally due
to the speed torque of the rotors or intentionally as
a flight direction change.
For the QuadroCopter, this movement is not
controlled by a tail rotor, but through speed variation
of the individual rotors to each other.
Point (1) indicates „forwards“.
76
Figure 19
Page 77

f) Pitch
Pitch denotes the movement around the cross axis
which can be compared to the nodding of a head.
Through this, the QuadroCopter gains flight speed
forwards or backwards or decelerates.
Point (1) indicates „forwards“.
g) Roll
Roll denotes the movement around the centre line
which can be compared to the sideways rolling of
a ball (or the sideways crawl of a crab). In this way,
through lifting one side the QuadroCopter moves
independent of its forward direction to the side.
Point (1) indicates „forwards“.
Figure 20
Figure 21
77
Page 78

15. The First Flight
The first flight test should be made with the sensors on (function „agility mode“ off) to get used to the flight characteristics.
After getting used to them, activate the „agility mode“ function on your remote control transmitter at a sufficient distance
from the ground. The sensors are now limited in their function. Your QuadroCopter now reacts similar to a helicopter
and the control reactions are much more agile.
If the flight characteristics that prevail in „agility mode“ are not yet 100% controllable for you, you may switch on the
sensors again in flight at any time. The QuadroCopter then returns to the usual flight and control characteristics.
In „agility mode“, the QuadroCopter can be used for simple freestyle flying (loopings and rolls). Such flight figures
should, however, be performed at a sufficient height.
Important!
Before switching on the transmitter, please set the throttle stick to „motor off“ and all trim levers of the pilot
stick to zero (mid trimming). Otherwise, the QuadroCopter may not recognise the transmitter after the flight
battery is connected.
Attention!
The flight characteristics with active „Agility mode“ function are not suitable for beginners. If you do not
have sufficient flight experience with QuadroCopters and/or helicopters, we recommend performing the
first flights with active „agility mode“ with appropriate care.
In contrast to freestyle-capable helicopters, never reduce the throttle during a looping or roll while the QuadroCopter is
on its back, since the flight motions are only achieved by speed changes of the rotors. If the throttle is too low in the
reverse position, the speed changes of the individual rotors by flight control possible or required for the flight figures
can no longer be achieved. The QuadroCopter can no longer be controlled in such cases!
Observe particularly good battery attachment to your QuadroCopter to reliably prevent loosening or slipping of the
battery.
Switch on the remote control. Then connect the flight battery. The QuadroCopter then performs a short self-test after
which the green LED is permanently lit. In case of an error, the LEDs flash.
If an error occurs, the rechargeable battery should be disconnected and connected again after the error is eliminated
(e.g. throttle not in zero position). In case of an error, the motors cannot be started again for safety reasons. Please
ensure that the QuadroCopter stands as level as possible when the rechargeable battery is connected.
Until the green LED lights up, all sensors are being internally aligned and the QuadroCopter should not be moved
during this time. If the place of take-off is uneven, it is recommended that you level out the surface and save the neutral
position through full throttle/yaw right (see chapter „set neutral position“).
Start the motors (with throttle on zero, yaw left) and let the motors run at idling speed. Check the running of the rotors
once again. All rotors should run smoothly on one level without the QuadroCopter vibrating.
If a motor does not start, turn the motors off again and move the rotor of the non-starting motor to a quarter rotation
with your hand. Then start the motors again.
Ideally, now slowly increase the speed of the rotors (the throttle) of the QuadroCopter until you can see a slight
increase of altitude. Test the roll and yaw directions just before the QuadroCopter starts to hover to ensure that the
transmitter is correctly set and there is no channel inverting (control signals are reversed).
78
Page 79

Generally avoid any fast and big controlling motions. Also watch closely to see whether and in which direction the
QuadroCopter moves. By using trimming on the remote control, you can prevent undesired movements.
Important!
Never take off with a badly trimmed flight device.
Then increase the throttle until the QuadroCopter is at least one meter above the ground.
Carefully try to correct a gentle drift with the trim levers for yaw, pitch or roll.
Once the QuadroCopter is high enough in the sky, decrease the throttle until the QuadroCopter hovers.
Now you have managed the critical part and can slowly and carefully better familiarise yourself with the throttle controlling
motions of the QuadroCopter.
To land the QuadroCopter again, decrease the throttle slightly until the QuadroCopter gravitates to the ground. A
somewhat solid touchdown on the ground is no problem and should not be corrected with jerky throttle movements.
Try to touch down where possible in vertical position („helicopter landing“). Avoid landing with high horizontal speeds
(„airplane landing“).
After landing, turn off the motors (push throttle stick to the bottom right).
Practice this starting procedure a few times to get a feel for the QuadroCopter. Once you are reasonably sure, you can
begin to steer the direction with yaw, pitch and roll. Always steer slowly and carefully and practice the processes a little
before trying a new flight manoeuvre. The first flights should not last longer than 30 to 60 seconds each.
79
Page 80

16. Maintenance, Care and Repair
a) Regular Cleaning
The QuadroCopter is a very simple but nonetheless well-designed flying device. There are no mechanical parts that
need to be lubricated or require special maintenance. However, after each flight operation you should clean the
QuadroCopter of possible dirt (grass blades, dust, etc.).
For cleaning, use a dry or slightly damp cloth and avoid contact between water and the electronics, rechargeable
battery and motors.
Do not fly without covering the electronics. Please ensure that no moisture enters the inner central piece (e.g. wet
grass blades etc.). Never fly when it is raining!
b) Replacing the Rotors
If a rotor is damaged in a crash or other action, replace it immediately. This also applies if there are any fine tears or
grazing in the rotor. Due to the high speed, material parts could come loose if the rotors are damaged and this could
lead to damage to or endangerment of the environment.
To change a rotor, remove the rotor tip with the spring washers and the faulty rotor. Carry out the mounting of the new
rotor as described in the chapter „Final Assembly of the QuadroCopter „, under mounting of the rotors. Observe
correct selection of the rotor according to the respective motor’s rotating direction.
Attention!
Please observe the rotating direction of the respective motor and the choice of the corresponding rotor
without fail. If these are incorrectly chosen, the model will not be able to fly and will act in an erratic way
when next started!
c) Replacing a Motor
If a motor is defective (overheating, electrical fault, bearing damage or bent motor shaft), this must be replaced.
For this purpose, carry out the following steps:
• Remove the rotor from the faulty motor.
• Remove the upper enclosure and the upper part of the grid frame by loosening the upper screws.
Now you have free access to the motor drivers (driver board). You can also carefully remove these from the clamp
for more space.
• Note down the colours of the motor connecting cable at the soldering points A, B and C and unsolder the cable.
• Loosen the screws of the motor clamp and remove the motor from the motor clamp. Pull the cable through the radial
arm.
• Take the new motor and pull the connecting cable through the radial arm.
80
Page 81

• Bolt down the motor and solder the cable again following the colours that you noted down.
Attention!
If the colours of the connecting cables are swapped, the rotating direction of the motors will change. This
will cause the model to malfunction! As a precaution, compare the configuration of the other motors with
that of the replaced motor.
• Insert the driver board in its clamp once again, check to see if the flat cable is sitting correctly as a connector to the
flight control and mount the upper part of the grid frame.
Should you wish to replace several motors, you should carry out the individual steps in sequence for each
motor.
d) Replacing a Radial Arm
Damaged radial arms can be replaced. Carry out the steps as described under „Replacing a Motor“. When you have
removed the motor from the damaged radial arm, simply secure the motor to the new radial arm and carry out the
steps as described.
For replacing the radial arm, remove the upper part of the grid frame. When removing the radial arm, turn this slightly
and remove from the grid frame.
e) Replacing the Complete Frame
If the frame is broken after crashing but the electronics are still in working condition, it is possible to replace the
complete frame.
For this, simply remove the upper and lower enclosures and the upper part of the grid frame, then remove the motors
as described under the point „replacing a motor“ and insert the motors in the new radial arms. Remove the remaining
electronics (flight control and 2x driver board) from the clamp and place in the new grid frames. Then mount the new
radial arms in the new grid frames.
The spare parts list is located on our Internet page www.conrad.com in the download section for the
respective product.
81
Page 82

17. Disposal
a) General Information
Electronic devices must not be disposed of in the domestic waste!
At the end of its service life, dispose of the product according to the relevant statutory regulations.
b) Batteries and Rechargeable Batteries
You as the end user are required by law (Battery Ordinance) to return all used batteries/rechargeable batteries. Disposing
of them in the household waste is prohibited!
Batteries and rechargeable batteries containing hazardous substances are marked with adjacent symbol
You may return used batteries/rechargeable batteries free of charge at the official collection points of your community,
in our stores, or wherever batteries/rechargeable batteries are sold.
You thus fulfil your statutory obligations and contribute to the protection of the environment.
to indicate that disposal in the household waste is prohibited. The descriptions for the respective heavy
metal are: Cd=cadmium, Hg=mercury, Pb=lead (the designation is written on the battery/rechargeable
battery, e.g. under the dust bin symbol depicted at the left).
18. Declaration of Conformity (DOC)
The manufacturer hereby declares that this product complies with the essential requirements and regulations and all
other relevant provisions of the 1999/5/EC directive.
The compliance statement for this product is available at www.conrad.com.
82
Page 83

19. Technical Data
Dimensions
Diameter without rotors: ............................................ approx. 450 mm
Total expanded height: .............................................. approx. 165 mm
Weight:....................................................................... approx. 690 g incl. battery
Max. take-off weight .................................................. 1,000 g (must not be exceeded!)
Electrical Data
Supply voltage: .......................................................... 9 - 12 V (3 cell LiPo battery)
Performance Data
Average power input per motor: ................................ approx. 3 - 9 A
Max. power per motor: .............................................. approx. 14 A
Shear force per motor: .............................................. Max. 700 g
Operating environment
Operational area: ....................................................... Indoors and outdoors (dry environment, in the absence of rain)
Wind during flight operation: ..................................... No to light wind
Ambient temperature: ................................................ +10 °C to +40 °C
Relative humidity: ...................................................... Max. 80%, non-condensing
83
Page 84

1. Introduction ........................................................................................................................................................ 86
2. Utilisation conforme ........................................................................................................................................... 87
3. Explication des symboles .................................................................................................................................. 87
4. Description du produit ....................................................................................................................................... 88
5. Étendue de la livraison ...................................................................................................................................... 89
6. Consignes de sécurité ....................................................................................................................................... 90
7. Remarques spécifiques aux piles et batteries .................................................................................................. 93
8. Montage final du QuadroCopter ........................................................................................................................ 95
9. Vérification de la configuration ........................................................................................................................ 103
10. Avant chaque mise en service ........................................................................................................................ 110
Table des matières
a) Généralités .................................................................................................................................................. 90
b) Avant la mise en service ............................................................................................................................. 91
c) Durant le fonctionnement ............................................................................................................................ 91
a) Émetteur ...................................................................................................................................................... 93
b) Batterie de propulsion ................................................................................................................................. 94
a) Montage des balanciers .............................................................................................................................. 95
b) Montage des jambes d’atterrissage ............................................................................................................ 95
c) Montage des rotors ..................................................................................................................................... 96
d) Convertisseur de signal composite ............................................................................................................. 97
e) Raccordement au récepteur ....................................................................................................................... 98
f) Sortie du signal composite .......................................................................................................................... 99
g) Indicateur d’état à DEL ............................................................................................................................. 100
h) Mise en service du convertisseur de signal composite ............................................................................ 101
i) Montage de la batterie de propulsion ....................................................................................................... 101
j) Montage de l’antenne et du couvercle du haut ........................................................................................ 102
a) Généralités ................................................................................................................................................ 103
b) Détection des canaux de l’émetteur (généralités) .................................................................................... 104
c) Apprentissage de « l’accélération » .......................................................................................................... 105
d) Apprentissage du « lacet » ....................................................................................................................... 105
e) Apprentissage du « tangage » ..................................................................................................................105
f) Apprentissage du « roulis » ......................................................................................................................106
g) Procédure d’apprentissage de l’interrupteur « Agility-Mode » ................................................................. 106
h) Réglage du mode de vol ........................................................................................................................... 107
i) Configuration à l’aide du logiciel de l’ordinateur ....................................................................................... 108
j) Raccords et éléments de signalisation du régulateur de vol « QC 09 » .................................................. 109
k) Modes de télécommande disponibles ...................................................................................................... 110
a) Contrôle des raccords vissés .................................................................................................................... 110
b) Contrôle des pièces mobiles ..................................................................................................................... 110
c) Ajustage de la position neutre .................................................................................................................. 111
Page
84
Page 85

Page
11. Dispositifs de sécurité ...................................................................................................................................... 112
a) Protection du moteur ................................................................................................................................. 112
b) Atterrissage d’urgence .............................................................................................................................. 112
c) Surveillance des sous-tensions ................................................................................................................ 112
12. Affichages à DEL ............................................................................................................................................. 113
13. Signaux acoustiques du générateur de signaux ............................................................................................. 115
14. Informations pour le premier décollage ........................................................................................................... 116
a) Comportement général lors du pilotage ................................................................................................... 116
b) Démarrage des moteurs ........................................................................................................................... 116
c) Arrêt des moteurs ...................................................................................................................................... 117
d) Vol stationnaire.......................................................................................................................................... 117
e) Lacet .......................................................................................................................................................... 117
f) Tangage..................................................................................................................................................... 118
g) Roulis......................................................................................................................................................... 118
15. Le premier vol .................................................................................................................................................. 119
16. Maintenance, entretien et réparation .............................................................................................................. 121
a) Nettoyage régulier .....................................................................................................................................121
b) Remplacement des rotors ......................................................................................................................... 121
c) Remplacement d’un moteur...................................................................................................................... 121
d) Remplacement d’un balancier .................................................................................................................. 122
e) Remplacement du cadre complet ............................................................................................................. 122
17. Élimination ....................................................................................................................................................... 123
a) Généralités ................................................................................................................................................ 123
b) Piles et batteries ........................................................................................................................................ 123
18. Déclaration de conformité (DOC) .................................................................................................................... 123
19. Caractéristiques techniques ............................................................................................................................ 124
85
Page 86

1. Introduction
Chère cliente, cher client,
Nous vous remercions pour l’achat du présent produit.
Ce produit est conforme aux exigences légales, nationales et européennes.
Afin de maintenir l’appareil en bon état et d’en assurer un fonctionnement sans danger, l’utilisateur doit impérativement
respecter le présent mode d’emploi !
Le présent mode d’emploi fait partie intégrante du produit. Il contient des remarques importantes
pour la mise en service et la manipulation du produit. Tenez compte de ces remarques, même en
cas de cession de ce produit à un tiers.
Conservez le présent mode d’emploi afin de pouvoir le consulter à tout moment !
Tous les noms d’entreprises et appellations de produits contenus dans ce mode d’emploi sont des marques déposées
des propriétaires respectifs. Tous droits réservés.
Pour toute question technique, veuillez vous adresser à :
Tél. : 0892 897 777
Fax : 0892 896 002
e-mail : support@conrad.fr
Du lundi au vendredi de 8h00 à 18h00
le samedi de 8h00 à 12h00
86
Tél. : 0848/80 12 88
Fax : 0848/80 12 89
e-mail : support@conrad.ch
Du lundi au vendredi de 8h00 à 12h00 et de 13h00 à 17h00
Page 87

2. Utilisation conforme
Le « QuadroCopter 450 ARF QC09 » est un modèle réduit similaire à un hélicoptère exclusivement destiné à un
usage privé dans le domaine du modélisme et pour les temps d’utilisation associés.
Le système n’est pas approprié pour une utilisation dans un autre domaine. Toute utilisation autre que celle stipulée
ci-dessus peut endommager le produit et engendrer des dangers comme par ex. court-circuit, incendie, électrocution,
etc. Impérativement respecter les consignes de sécurité !
Le produit ne doit ni prendre l’humidité ni être mouillé.
Ce produit n’est pas un jouet et ne convient pas aux enfants de moins de 14 ans.
Observez toutes les consignes de sécurité stipulées dans le présent mode d’emploi. Celles-ci contiennent
des informations importantes relatives à l’utilisation du produit.
Vous êtes seul responsable de l’utilisation sans danger du modèle réduit !
3. Explication des symboles
Un point d’exclamation placé dans un triangle attire l’attention sur des dangers particuliers lors du
maniement, du fonctionnement et de l’utilisation.
Le symbole de la « flèche » renvoie à des conseils et consignes d’utilisation particuliers.
87
Page 88

4. Description du produit
Le modèle réduit d’hélicoptère « QuadroCopter 450 ARF QC09 » est un objet volant presque complètement prémonté.
Ces engins volants sont déjà utilisés, dans le domaine professionnel, pour diverses activités. Le QuadroCopter est
stabilisé par une électronique pilotée par un microprocesseur récent et des détecteurs d’accélération.
Les principales différences avec le prédécesseur « QuadroCopter 450 » (n° de commande Conrad 208000) sont les
capteurs de plus grande qualité à technologie MEMS, un « Agility-Mode » et un logiciel amélioré pour la commande et
la régulation. Dans l’ensemble, ces modifications offrent des caractéristiques de vol améliorées et permettent de
réaliser des figures acrobatiques simples en « Agility-Mode ». Par ailleurs, un convertisseur de signal composite est
intégré. Celui-ci permet une utilisation avec des récepteurs traditionnels (par ex. à partir d’une autre télécommande).
Le concept de la platine du régulateur de vol (platine principale QC09) a également complètement été remanié afin de
proposer des interfaces et raccords correspondants pour d’éventuels modules supplémentaires. Pour le réglage du
mode, des barrettes à broches remplacent les interrupteurs DIP.
Des moteurs à courant continu haut de gamme sans balais, associés à une commande spécialement conçue à cet
effet, garantissent une grande autonomie de vol avec une puissance élevée et offrent une grande réserve pour les
charges utiles, comme par ex. les caméras, etc. Grâce à sa commande révolutionnaire et à son autostabilisation
électronique, l’appareil présente d’excellentes caractéristiques de vol. Grâce aux différents programmes de vol, les
débutants et les pilotes expérimentés auront rapidement du plaisir à piloter ce modèle réduit.
Le QuadroCopter peut être piloté aussi bien en salle qu’à l’extérieur. Les régulations électroniques intégrées peuvent
certes amortir les petits changements indésirables de la position de vol mais ne peuvent toutefois pas les neutraliser
complètement. Le poids du QuadroCopter étant relativement faible, il réagit fortement au vent. Les conditions de vol
idéales sont donc assurées en présence d’un vent nul, voire très léger et régulier.
Le cadre design en matériau léger composé de balanciers en aluminium est robuste et offre d’excellentes
caractéristiques de vol. Le cadre est pliable et peut être transporté facilement sans prendre de place. Le cadre design
accueille l’ensemble du système électronique et dispose de place pour les cartes d’extension. La construction en
treillis associée à un faible poids offre une grande résistance et une bonne protection du circuit électronique.
De par sa construction, ce modèle réduit a été conçu pour les pilotes expérimentés de modèle réduit d’hélicoptère
souhaitant effectuer, avec le QuadroCopter, non seulement des manœuvres comme avec un vrai hélicoptère, mais
aussi des manœuvres acrobatiques.
Le modèle extrêmement maniable convient également aux débutants en modélisme. Avant le premier vol, nous
recommandons toutefois aux débutants de s’entraîner sur un simulateur de vol pour hélicoptères ou de faire appel à
un pilote expérimenté de modèle réduit d’hélicoptère.
L’équipement du modèle réduit peut être étendu au moyen de dispositifs électroniques supplémentaires (interface
d’extension disponible sur l’unité de commande) et il est possible de monter différents mécanismes sur le modèle
réduit.
88
Page 89

5. Étendue de la livraison
Figure 1
1) QuadroCopter prémonté
2) Quatre rondelles élastiques M3
3) Deux hélices à rotation à gauche
4) Deux hélices à rotation à droite
5) Quatre pointes de rotor
6) Bande auto-agrippante
7) Connecteur à fiches pour la batterie
8) Tube d’antenne
Sans illustration : mode d’emploi
Vous trouverez la liste des pièces détachées sur notre site Internet www.conrad.com dans la section
téléchargement du produit respectif. Vous pouvez également demander la liste des pièces de rechange
par téléphone. Vous trouverez les coordonnées au début de ce mode d’emploi au chapitre « Introduction ».
Le montage et le fonctionnement du modèle réduit requièrent des composants additionnels qui ne sont pas compris
dans l’étendue de la livraison du modèle réduit d’avion :
Montage :
Fer à souder et accessoires nécessaires.
Fonctionnement :
Pour le fonctionnement, vous avez besoin d’une télécommande simple à 5 canaux, d’une batterie de propulsion LiPo
à 3 cellules d’env. 2 500 mAh et d’un régime de décharge de 25 C ainsi que d’un chargeur LiPo avec Balancer LiPo.
Les accessoires assortis, qui ont fait leurs preuves, dans le « kit d’extension du QuadroCopter »,
spécialement conçu pour les débutants, sont disponibles dans nos catalogues ou sur www.conrad.com.
89
Page 90

6. Consignes de sécurité
Tout dommage résultant du non-respect du présent mode d’emploi entraîne l’annulation de la
garantie légale / du fabricant. Nous déclinons toute responsabilité pour les dommages
consécutifs !
De même, nous n’assumons aucune responsabilité en cas de dommages matériels ou corporels
résultant d’une utilisation de l’appareil non conforme aux spécifications ou du non-respect des
présentes consignes de sécurité ! De tels cas entraînent l’annulation de la garantie ou garantie
légale.
En outre, la garantie légale et la garantie ne couvrent pas les traces d’usure normales ni les dommages
causés par un accident ou une chute (par ex. pales du rotor ou pièces du châssis cassées).
Chère cliente, cher client, ces mesures de sécurité servent non seulement à la protection du produit, mais
également à assurer votre propre sécurité et celle d’autres personnes. Veuillez donc très attentivement
lire ce chapitre avant la mise en service du produit !
a) Généralités
Attention, remarque importante !
L’utilisation du modèle réduit peut occasionner des dommages matériels et / ou corporels. Veillez donc
impérativement à ce que l’utilisation du modèle réduit soit couverte par votre assurance, par ex. par une
assurance responsabilité civile. Si vous avez déjà souscrit une assurance responsabilité civile, veuillez
vous renseigner auprès de votre compagnie d’assurance si l’utilisation du modèle réduit est bien couverte
par cette assurance avant la mise en service du modèle réduit.
Veuillez noter : une assurance est obligatoire pour tous les modèles réduits d’avion dans divers pays de
l’Union européenne !
• Pour des raisons de sécurité et d’homologation (CE), il est interdit de modifier soi-même la construction et / ou de
transformer le produit et ses composants.
• Ce produit n’est pas un jouet et ne convient pas aux enfants de moins de 14 ans.
• Le produit ne doit ni prendre l’humidité ni être mouillé. Le QuadroCopter étant équipé d’un système électronique très
sensible, réagissant à des variations de température et optimisé pour une plage de température définie, vous devez
éviter tout fonctionnement en-dessous de +10 °C.
Le produit a été développé pour un fonctionnement à une température ambiante entre +10 °C et +40 °C et pour une
humidité de l’air normale en Europe centrale par temps sec. Un fonctionnement en dehors des conditions mentionnées
peut modifier les propriétés (des matériaux) et donc endommager le produit !
• Si vous ne disposez pas de connaissances suffisantes concernant l’utilisation de modèles d’hélicoptères
télécommandés, veuillez vous adresser à un modéliste expérimenté ou à un club de modélisme. Vous pouvez
également obtenir une première expérience à l’aide d’un simulateur de vol adapté.
• Ne laissez pas traîner le matériel d’emballage sans surveillance ; il pourrait devenir un jouet dangereux pour les
enfants.
• Veiller à ne pas dépasser un poids au décollage supérieur à 1 000 g. Si le poids au décollage est supérieur, les
rotors pourraient être endommagés durant le fonctionnement et ainsi provoquer un crash du modèle réduit !
• Si vous avez des questions auxquelles le mode d’emploi ne répond pas, prière de nous contacter (coordonnées,
voir chapitre 1) ou demandez l’avis d’un autre spécialiste.
90
Page 91

b) Avant la mise en service
• Assurez-vous qu’aucun autre modèle réduit ne fonctionne sur le même canal que la télécommande (fréquence
émise avec les télécommandes 35 ou 40 MHz) dans le champ de portée de cette dernière. Avec les télécommandes
qui travaillent dans la gamme 2,4 GHz, vous devez vous assurer que votre télécommande fonctionne de manière
irréprochable en parallèle avec d’autres télécommandes sur la même bande de fréquences (2,4 GHz). Vous risqueriez
sinon de perdre le contrôle du modèle réduit télécommandé !
• Déroulez complètement le fil d’antenne du récepteur du modèle réduit. Posez l’antenne en veillant à ce que son
câble ne puisse en aucun cas se coincer dans les pièces rotatives. Le câble de l’antenne doit être inséré dans le
tube d’antenne et l’excédent de câble (par ex. avec les télécommandes 35 ou 40 MHz) doit être enroulé puis fixé à
l’aide d’un morceau de ruban adhésif transparent sur le tube d’antenne. Ne coupez en aucun cas le fil d’antenne
sinon la portée de la télécommande sans fil risque d’être considérablement réduite. Observez ici également les
consignes du fabricant de la télécommande.
• Contrôlez régulièrement la sécurité de fonctionnement de votre modèle réduit et de la télécommande. Assurez-vous
alors de l’absence de dommages visibles tels que connecteurs à fiches défectueux ou câbles endommagés.
• Toutes les pièces mobiles du modèle doivent être facilement manœuvrables, mais ne doivent pas avoir de jeu dans
le logement.
• Vérifiez avant chaque mise en service que les rotors sont correctement placés et bien fixés.
• La batterie de propulsion requise pour le fonctionnement ainsi que celles insérées dans la télécommande le cas
échéant doivent être rechargées conformément aux instructions du fabricant.
• Si vous utilisez des piles pour l’alimentation de l’émetteur, veillez à ce qu’il y ait encore suffisamment de capacité
résiduelle (contrôleur de piles). Si les piles sont vides, remplacez toujours le jeu complet et jamais uniquement des
cellules individuelles.
• Durant le fonctionnement de votre modèle réduit, déployez toujours l’antenne télescopique (des télécommandes 35
et 40 MHz) de l’émetteur sur toute sa longueur, la portée de l’émetteur s’en trouverait sinon considérablement
réduite et l’étage final de l’émetteur en serait fortement affecté.
• Allumez toujours d’abord l’émetteur. Veillez à ce que le levier d’accélération soit en position la plus basse (moteurs
arrêtés) lorsque vous allumez l’émetteur ! Ne branchez qu’ensuite la batterie de propulsion du modèle réduit. Le
modèle peut sinon réagir de manière inattendue et les rotors peuvent se mettre involontairement en marche ! Danger de blessures !
• Lorsque les rotors tournent, veillez à ce qu’aucun objet ni aucune partie du corps n’entre dans la zone de rotation ou
d’aspiration des rotors.
c) Durant le fonctionnement
• Ne prenez pas de risques lors du fonctionnement du modèle réduit ! Votre sécurité personnelle et celle de votre
entourage dépendent exclusivement de votre comportement responsable durant l’utilisation du modèle réduit.
• Une utilisation incorrecte peut provoquer de graves dommages matériels et corporels ! Durant le vol, veillez donc à
maintenir une distance suffisante entre le modèle réduit et les personnes, animaux et objets à proximité.
• Choisissez un terrain approprié pour l’utilisation de votre modèle réduit.
• Pilotez uniquement votre modèle réduit lorsque vous êtes en pleine possession de vos moyens. La fatigue, l’alcool
et les médicaments peuvent fausser vos réactions.
91
Page 92

• Ne pilotez jamais le modèle réduit directement vers les spectateurs ou vers vous-même.
• Non seulement le moteur et le régulateur de vol, mais aussi la batterie de propulsion peuvent chauffer pendant le
fonctionnement du modèle réduit. Pour cette raison, faites une pause de 10 à 15 minutes au plus tard au bout 20
minutes de vol avant de recharger la batterie de propulsion ou de redémarrer avec une éventuelle batterie de
propulsion de rechange. Attendre que les moteurs d’entraînement aient refroidi à la température ambiante.
• Laissez toujours la télécommande (émetteur) allumée tant que le modèle réduit est en marche. Après l’atterrissage,
déconnectez toujours d’abord la batterie de propulsion ou éteignez le modèle réduit. Vous pouvez ensuite éteindre
l’émetteur de la télécommande.
• En présence d’un défaut ou d’un dysfonctionnement, d’abord éliminer la cause de la panne avant de redémarrer le
modèle réduit.
• N’exposez pas votre modèle réduit et la télécommande à un rayonnement solaire direct ou à une chaleur trop
élevée pendant une durée prolongée.
• En cas de crash grave (d’une grande hauteur, par exemple), les détecteurs électroniques du gyroscope peuvent
être endommagés ou déréglés. Leur bon fonctionnement doit être impérativement vérifié avant tout nouveau vol !
Nous recommandons également un ajustage de la position neutre.
• En cas de crash, mettez immédiatement l’accélération à zéro. Les rotors en rotation peuvent être endommagés en
cas de contact avec des obstacles et en cas de choc. Vérifiez impérativement l’absence d’éventuelles fissures ou
points de rupture avant tout nouveau décollage !
• Afin d’éviter toute détérioration du QuadroCopter en cas de crash en présence d’une sous-tension ou en cas de
décharge totale de la batterie, nous vous recommandons de surveiller les signaux lumineux de sous-tension durant
le vol. Comme les DEL intégrées ne diffusent de la lumière que dans une direction, nous recommandons l’installation
d’un LiPo-Saver supplémentaire (n° de commande Conrad 230327). Le LiPo-Saver vous indique une sous-tension
imminente au moyen d’un signal lumineux. Installez le LiPo-Saver à un emplacement approprié dans le QuadroCopter.
92
Page 93

7. Remarques spécifiques aux piles et batteries
Bien que le maniement de piles et de batteries dans la vie quotidienne fasse partie de la normalité de la
vie, ceci présente toutefois de nombreux problèmes et dangers. En particulier avec les batteries LiPo /
LiIon et leur contenu énergétique élevé (en comparaison aux batteries traditionnelles NiCd ou NiMH),
différentes consignes doivent impérativement être observées, sans quoi il y a risque d’explosion et
d’incendie.
Le QuadroCopter est livré sans batteries ni chargeur. Nous souhaitons toutefois, pour des raisons de
sécurité, vous fournir des informations complètes sur la manipulation des piles et batteries. Pour les
accessoires propres, veuillez également observer toutes les informations jointes du fabricant.
a) Émetteur
• Maintenez les piles et batteries hors de la portée des enfants.
• Ne laissez pas traîner les piles et batteries, les enfants ou les animaux domestiques risqueraient de les avaler. En tel
cas, consultez immédiatement un médecin !
• Ne court-circuitez ni ne démontez jamais les piles et batteries et ne les jetez jamais dans le feu. Il y a danger
d’explosion !
• En cas de contact avec la peau, les piles / batteries qui fuient ou sont endommagées peuvent entraîner des brûlures
à l’acide. En tel cas, veuillez donc utiliser des gants de protection appropriés.
• Les piles conventionnelles ne sont pas rechargeables. Il y a danger d’incendie et d’explosion ! Ne rechargez que les
batteries prévues à cet effet ; n’utilisez que des chargeurs de batteries appropriés.
• Si vous n’utilisez pas l’appareil pendant une période prolongée (par ex. en cas de stockage), retirez les piles (ou
batteries) de la télécommande afin d’éviter de l’endommager en cas de fuite des piles ou batteries.
• Rechargez les batteries NiMH ou NiCd environ tous les 3 mois. Le cas contraire, l’autodécharge pourrait provoquer
une décharge totale, susceptible de rendre les batteries inutilisables.
• Remplacez toujours le jeu complet de piles ou batteries. Ne mélangez pas les piles / batteries pleines avec des
piles / batteries à moitié pleines. N’utilisez que des piles ou batteries du même type et du même fabricant.
• Ne mélangez jamais piles et batteries !
93
Page 94

b) Batterie de propulsion
Attention !
Après le vol, déconnectez la batterie de propulsion LiPo du circuit électronique du QuadroCopter. Ne
laissez pas la batterie de propulsion LiPo connectée au système électronique quand vous ne l’utilisez pas
(par ex. durant le transport ou le stockage). La batterie de propulsion LiPo peut sinon subir une décharge
complète. Ce qui la détruit et la rend inutilisable ! Il y a également danger de dysfonctionnements liés aux
impulsions parasites. Les rotors peuvent démarrer involontairement et provoquer des dommages ou des
blessures.
• Ne rechargez jamais la batterie de propulsion LiPo directement après son utilisation. Attendez toujours d’abord que
la batterie de propulsion LiPo ait refroidi (pendant au moins 10 à 15 minutes).
• Utilisez un chargeur approprié et un égaliseur / Balancer pour recharger les batteries LiPo.
• Ne rechargez que les batteries intactes, qui ne sont pas endommagées. Si l’isolation externe de la batterie devait
être endommagée ou la batterie déformée ou gonflée, il est absolument interdit de la charger. En tel cas, il y a un
danger élevé d’incendie et d’explosion !
• N’endommagez jamais l’enveloppe extérieure de la batterie de propulsion LiPo. Ne découpez pas l’enveloppe
extérieure. Ne percez pas la batterie de propulsion LiPo avec des objets tranchants. Il y a danger d’incendie et
d’explosion !
• Pour recharger la batterie de propulsion LiPo, retirez-la du modèle réduit et placez-la sur un support réfractaire
(par ex. carreau en pierre). Respectez une distance suffisante par rapport aux objets inflammables.
• Le chargeur et la batterie de propulsion LiPo s’échauffant pendant la procédure de charge, il est nécessaire d’assurer
une ventilation suffisante. Ne recouvrez jamais le chargeur ni la batterie de propulsion LiPo !
• Ne rechargez jamais les batteries LiPo sans surveillance.
• Débranchez la batterie de propulsion LiPo du chargeur dès qu’elle est complètement rechargée.
• Les chargeurs doivent uniquement être utilisés en intérieur, dans les locaux fermés et secs. Il faut impérativement
veiller à ce que les chargeurs et la batterie LiPo ne prennent pas l’humidité et ne soient pas mouillés.
Avec les chargeurs qui fonctionnent sur la tension du secteur, il y a alors danger de mort par électrocution !
De plus, il y existe un risque d’incendie et d’explosion par la batterie. En raison des produits chimiques
qu’elles contiennent, les batteries LiPo sont particulièrement sensibles à l’humidité ! N’exposez pas le
chargeur ou la batterie de propulsion LiPo à des températures élevées / basses ni à un rayonnement
solaire direct. Lorsque vous manipulez des batteries LiPo, respectez les consignes de sécurité spéciales
du fabricant de la batterie !
94
Page 95

8. Montage final du QuadroCopter
a) Montage des balanciers
Le modèle réduit est livré dans un état plié.
Déployez d’abord les quatre balanciers (1) en
position de vol. Pour cela, écartez légèrement les
clips au niveau du cadre central (2) et relevez le
balancier vers le haut (enclenchement perceptible).
Si vous souhaitez rabattre les balanciers à des fins
de transport, vous devez légèrement écarter les
clips au niveau du cadre central afin d’éviter de les
casser.
Si vous ne souhaitez plus rabattre les
balanciers à des fins de transport, vous
pouvez les fixer durablement en
appliquant une goutte de colle
instantanée ou à l’aide de serre-câbles.
Figure 2
b) Montage des jambes d’atterrissage
Déployez les jambes d’atterrissage (1) en position
de vol. L’enclenchement net des clips de maintien
(2) dans les fentes (3) doit être perceptible.
Pour rabattre les jambes, utilisez un petit tournevis
pour légèrement enfoncer les clips de maintien (2)
dans les fentes (3) et pour éviter ainsi de casser
les pièces en plastique.
Un indicateur de direction rouge est monté sur l’une
des jambes d’atterrissage. Cet indicateur de
direction doit toujours être considéré comme le sens
« avant » de vol.
Figure 3
Lors d’un atterrissage difficile, les jambes d’atterrissage se rabattent. Il s’agit d’un effet normal volontaire.
Si vous souhaitez éviter cet effet ou si vous ne souhaitez plus rabattre les jambes d’atterrissage à des fins
de transport, vous pouvez les fixer durablement en appliquant une goutte de colle instantanée.
95
Page 96

c) Montage des rotors
Le sens de rotation des rotors est indiqué sur la figure 4 (vue de dessus). Utilisez l’indicateur de direction rouge au
niveau de la jambe d’atterrissage et la flèche sur le balancier en tant que point de repère pour l’orientation du modèle.
Ils indiquent « l’avant » de l’appareil.
Attention !
Comme les moteurs sont déjà
prémontés, impérativement respecter
le sens de rotation des rotors en
fonction de la direction de vol (figure 4) !
Les rotors dans l’axe longitudinal (1)
tournent dans le sens des aiguilles
d’une montre (vers la droite) et doivent
disposer de l’inscription « Right ».
Les rotors dans l’axe transversal (2)
tournent dans le sens contraire des
aiguilles d’une montre (vers la gauche)
et doivent disposer de l’inscription
« Left ».
Attention !
Lorsque les rotors ne sont pas montés comme indiqué, les sens de rotation programmés ne correspondent
plus aux sens de rotation des rotors. Vous ne pouvez alors plus faire voler ni piloter le QuadroCopter !
Les rotors et les arbres moteur sont munis d’un
écrou hexagonal (3).
Installez les rotors (1) sur les arbres moteur (3) en
veillant à ce qu’ils s’enclenchent dans l’écrou.
Intercalez ensuite respectivement l’une des
rondelles élastiques fournies (4) entre le rotor et
l’extrémité de rotor correspondante (5), les rotors
risqueraient sinon de se desserrer pendant le vol.
Vissez à la main les extrémités de rotor sur les
arbres moteurs.
Figure 4
96
Attention !
Ne serrez pas trop au risque d’endommager les moteurs. Les arbres peuvent se rompre ou sortir des
paliers. Les moteurs tourneraient difficilement, ce qui peut aussi avoir un impact négatif sur les
caractéristiques de vol. Vérifiez, par conséquent, que tous les rotors tournent facilement après les avoir
vissés. La bague d’arrêt représentée sur la figure 5, n° 6, sur le dessous des moteurs doit pouvoir être
déplacée et ne doit pas se coincer.
Assurez-vous avant le vol que les rotors sont correctement vissés sur les moteurs. Procédez avec la plus
grande prudence en cas d’utilisation d’outils.
Figure 5
Page 97

d) Convertisseur de signal composite
En cas d’utilisation d’un récepteur disponible dans le commerce, un signal de commande distinct est généré pour
chaque servo puis émis via le contact enfichable du servo du récepteur. Le convertisseur de signal composite réassemble
les différentes impulsions du servo puis les émet sous forme de signal composite sériel. Pour la formation du signal
composite, il est possible de traiter jusqu’à 8 canaux.
Le récepteur peut alors être alimenté par le convertisseur de signal composite avec 5 V/DC. En cas d’utilisation avec
le « QuadroCopter », une alimentation électrique supplémentaire n’est pas requise.
Le récepteur de la télécommande doit être raccordé à la prise femelle de raccordement « ST3 » du convertisseur de
signal composite « QC07 ». Un câble de raccordement adéquat est fourni, à cet effet, avec le convertisseur de signal
composite.
La douille de raccordement « ST3 » est équipée de 10 contacts, numérotés de la droite vers la gauche. Le contact 10
se trouve à droite et le contact 1 à gauche.
Le convertisseur de signal composite « QC07 » est équipé des contacts de raccordement suivants :
C3
R17
U1
TP3
TP8
Q1
C7
TP7
R5
R1 R9 R13
R2 R10 R14
R6
TP2
TP1
C1
R3
R4
R7
R8
ST2
C6
R11 R15
ST3
R12
R16
ST1
5
6
1
2
LED2
C5
R20
R19
C4
C2
R18
R21
LED1
TP4
LED1 : Témoin de contrôle DEL verte
LED2 : Témoin de contrôle DEL rouge
ST3 : Prise de raccordement pour le câble du récepteur
ST2 : Contacts de raccordement pour le signal composite
ST1 : Prise de programmation pour les réglages liés à la production
Une description détaillée des différents contacts et des possibilités de raccordement est fournie dans les
paragraphes ci-après.
Figure 6
97
Page 98

e) Raccordement au récepteur
Enfichez le câble de raccordement du récepteur dans la prise femelle « ST3 » du convertisseur de signal composite.
Les prises femelles de raccordement 1 à 10 du câble sont prévues pour le raccordement du récepteur.
Les contacts du câble de raccordement sont affectés de la manière suivante :
Contact 10 = Canal 1
Contact 9 = Canal 2
Contact 8 = Canal 3
Contact 7 = Canal 4
Contact 6 = Canal 5
Contact 5 = Canal 6
Contact 4 = Canal 7
Contact 3 = Canal 8
Contact 2 = GND / Moins (-)
Contact 1 = 5 V / Plus (+)
Les signaux des 8 entrées (canaux 1 à 8) sont mesurés et traités par le convertisseur de signal composite. Un signal
composite est alors formé à partir de tous les signaux disponibles conformément aux spécifications pour télécommandes
RC (largeur d’impulsion comprise entre 1 et 2 ms). Suite à la mesure des signaux et à la diffusion des signaux, on
obtient une temporisation de la longueur d’une Frame. Cette temporisation n’a cependant aucune influence sur le
fonctionnement et n’est évoqué que pour plus de compréhension.
Les signaux de servo mesurés peuvent survenir dans n’importe quel ordre, en parallèle, les uns après les autres ou se
chevaucher. Il n’y a donc aucune restriction et le convertisseur de signal composite peut être utilisé pour tous les
systèmes conventionnels. Aucune pause de synchronisation n’est nécessaire entre les différents signaux.
Important !
Veillez à ce que toutes les entrées du convertisseur de signal composite soient, sans exception, affectées !
Avec un système à 6 canaux, il est donc impératif d’employer les entrées 1 à 6, et non pas, par exemple,
les canaux 1 à 4 puis 6 et 7. Avec une telle affectation, le circuit électronique ne reconnaîtrait pas les
canaux 6 et 7 !
R9 R13
10
R10 R14
C1
R3
R4
R7
R8
ST2
C6
R11 R15
ST3
R12
1
5
6
R16
ST1
1
2
Figure 7
98
Page 99

f) Sortie du signal composite
Le convertisseur de signal composite émet le signal
composite formé (« SuS ») sur le contact de gauche
du raccord « ST2 ».
Ce signal composite se compose d’autant de
signaux individuels que les signaux mesurés aux
entrées.
En cas d’utilisation d’un récepteur à 6 canaux par
exemple, le signal composite comprend également
6 canaux. La reconnaissance du nombre de canaux
s’effectue par le biais de la mesure valide du signal
au niveau des entrées.
Raccordez le câble tripolaire du signal composite
sur la prise femelle « ST2 » (voir figure 8a). La ligne
d’impulsions (repère sur le câble) doit alors être
raccordée au contact de gauche du connecteur
« ST2 ».
Les prises femelles « SuS», « +5V » et « GND »
doivent être reliées aux prises femelles
correspondantes de la platine principale (figure 8b)
à l’intérieur du QuadroCopter. Veillez à la polarité
correcte des deux barres !
R9 R13
R10 R14
SuS
C1
R3
+5V
R7
R4
R8
ST2
C6
GND
R11 R15
ST3
R12
R16
ST1
5
6
1
2
Figure 8a
Figure 8b
99
Page 100

g) Indicateur d’état à DEL
Le convertisseur de signal composite est équipé
d’une DEL verte et d’une DEL rouge pour l’affichage
LED2
LED1
d’état.
Une DEL verte allumée (« LED1 ») indique que
l’électronique se trouve en mode de fonctionnement
normal. Cela signifie que les signaux des servos
peuvent être mesurés et génèrent, le cas échéant,
C5
R18
R21
TP4
LED2
Rot
un signal composite. Si la DEL verte s’éteint, cela
signifie qu’un défaut élémentaire a été détecté au
niveau de l’électronique.
Une DEL rouge allumée (« LED2 ») indique
R20
R19
l’absence de signaux servo. Les causes peuvent
être, par exemple, des perturbations de réception,
un manque d’alimentation électrique du récepteur,
un émetteur éteint ou un défaut de contact dans
les câbles de raccordement.
C4
C2
Comportement en cas de perturbations de réception
Le convertisseur de signal composite mesure la qualité des signaux et reconnaît ainsi également les perturbations de
la réception. Comme les canaux 1 à 4 sont principalement employés pour la commande élémentaire des modèles
réduits, il faut accorder une attention particulière à ces canaux.
Perturbation des canaux 1 à 4
Les canaux sont contrôlés au niveau de la largeur d’impulsion (entre 1 et 2 ms). Lorsqu’une erreur est détectée, le
signal composite est généré en se servant de la dernière valeur valide. Si le taux d’erreurs est tellement élevé qu’une
bonne réception ne s’avère plus possible, le convertisseur de signal composite n’émet plus de signal composite et
active la DEL rouge. Le problème de réception peut ainsi être reconnu par la logique en aval et les problèmes de
réception ne passent pas inaperçus. Dès que le signal d’entrée est à nouveau valide, la DEL rouge s’éteint et un
signal composite est généré.
Perturbation des canaux 5 à 8
Si la perturbation de la réception se affecte uniquement les canaux 5 à 8, le signal composite est encore généré pour
les canaux 1 à 4 et les canaux 5 à 8 sont émis avec un longueur d’impulsion invalide. Une commande élémentaire du
modèle réduit reste ainsi possible, mais la perturbation peut également être détectée par une logique en aval sur les
canaux 5 à 8. Dès que le signal d’entrée est à nouveau valide, un signal composite normal est émis.
C3
R17
LED1
Rot
U1
TP3
TP8
Q1
C7
TP7
R5
R6
R1 R9
R2
TP2
TP1
R10
Figure 9
C
100
 Loading...
Loading...