

Page 1
19-5258; Rev 0; 4/10
1-Wire and SPI Authentication Microcontroller
General Description
The MAXQ1004 is a low-power microcontroller that
integrates a 10-bit ADC, 1-WireM slave interface, SPIK,
AES encryption, random-number generator (RNG), and
temperature sensor with a 16-bit MAXQM pipelined CPU.
Performance bandwidth is sufficient to handle master
or slave challenge-response authentication in portable
devices.
The device incorporates 16KB of flash memory and 640B
of RAM. Factory programming of a customer secret key
is available upon request. The microcontroller runs within
a wide 1.7V to 3.6V operating range.
For the ultimate in low-power performance, an ultra-lowpower stop mode (300nA typ) is available. In this mode,
only a minimum amount of circuitry is powered to support detection of the start of a 1-Wire transaction. When
1-Wire activity is detected, the microcontroller is turned
on and the command is executed in an atomic fashion.
This allows for stateless operation between commands,
providing the highest reliability and lowest power consumption.
Applications
Portable Electronics
Battery Chargers
Battery Packs
Ordering Information
PART
MAXQ1004-B01+
+Denotes a lead(Pb)-free/RoHS-compliant package.
*EP = Exposed pad.
TEMP
RANGE
-40°C to
+85°C
AES
ENCRYPTION
Yes
PIN-
PACKAGE
16 TQFN-
EP*
Features
S High-Performance, Low-Power, 16-Bit MAXQ20
RISC Core
S 6MHz Operation from an Internal Oscillator,
Approaching 1MIPS per MHz
S 1.7V to 3.6V Wide Operating Voltage
S Three Independent Data Pointers Accelerate Data
Movement with Automatic Increment/Decrement
S Up to Eight General-Purpose I/O Pins
S 16-Level Hardware Stack
S Optimized for C-Compiler (High-Speed/Density Code)
S Memory
16KB Flash Memory, In-Application Programmable
640B of Data RAM
4KB of ROM
JTAG/TAP Bootloader Mode for In-System
Programming
S Peripheral Features
10-Bit Delta-Sigma ADC, Internal Reference
1-Wire Slave Interface
On-Chip Power-On Reset (POR)/Power-Fail Reset
Overvoltage Detection
Programmable Watchdog Timer
Built-In Temperature Sensor, ±6NC
S Secure Programming Interface
Flash Programming Through Secure ROM Loader
Secret Key Destruction on Mass Erase
Permanent Loader Lockout Option
Code and Secret Scrambling
S Unique 64-Bit Serial Number
S Low-Power Consumption
300nA (typ) in Stop Mode
3.75mA (typ) at 6MHz, 0.8mA (typ) at 1MHz
Low-Power Divide-by Modes (2, 4, 8, 256)
1-Wire/Interrupt Activity Detector
MAXQ1004
1-Wire and MAXQ are registered trademarks of Maxim
Integrated Products, Inc.
SPI is a trademark of Motorola, Inc.
Note: Some revisions of this device may incorporate deviations from published specifications known as errata. Multiple revisions of any device
may be simultaneously available through various sales channels. For information about device errata, go to: www.maxim-ic.com/errata.
_______________________________________________________________ Maxim Integrated Products 1
For pricing, delivery, and ordering information, please contact Maxim Direct at 1-888-629-4642,
or visit Maxim’s website at www.maxim-ic.com.
Page 2
1-Wire and SPI Authentication Microcontroller
TABLE OF CONTENTS
Absolute Maximum Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Recommended DC Operating Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
10-Bit ADC Performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
SPI Electrical Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
SPI Master Communications Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
SPI Slave Communications Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
MAXQ1004
Pin Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Pin Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Detailed Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
MAXQ Core Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Memory Organization. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Utility ROM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Loading Flash Memory with the Bootstrap Loader . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
In-Application Flash Programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Code Scrambling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
ADC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Temperature Sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Nanopower Ring Wake-Up Timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Serial Number/Device ID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Hardware AES Engine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Watchdog Timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
16-Bit Timer/Counter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Serial Peripherals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Serial Peripheral Interface (SPI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1-Wire Bus System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Hardware Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Slave Functionality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Operating Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
In-Circuit Debug. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Applications Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Grounds and Bypassing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Design Guidelines for ESD Protection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Additional Documentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Development and Technical Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Typical Application Circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Package Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Revision History . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2
Page 3
1-Wire and SPI Authentication Microcontroller
LIST OF FIGURES
Figure 1. ADC Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Figure 2. In-Circuit Debugger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Figure 3. I/O Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Figure 4. Typical Application Circuit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
LIST OF TABLES
Table 1. Watchdog Interrupt Timeout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
MAXQ1004
3
Page 4
1-Wire and SPI Authentication Microcontroller
ABSOLUTE MAXIMUM RATINGS
Voltage Range on All Pins (including VDD),
except DQ to GND ............................................-0.5V to +3.6V
Voltage Range on DQ Relative to GND ...............-0.5V to +6.0V
Continuous Output Current
Any Single I/O Pin ...........................................................35mA
All I/O Pins Combined .....................................................35mA
Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional
MAXQ1004
operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect device reliability.
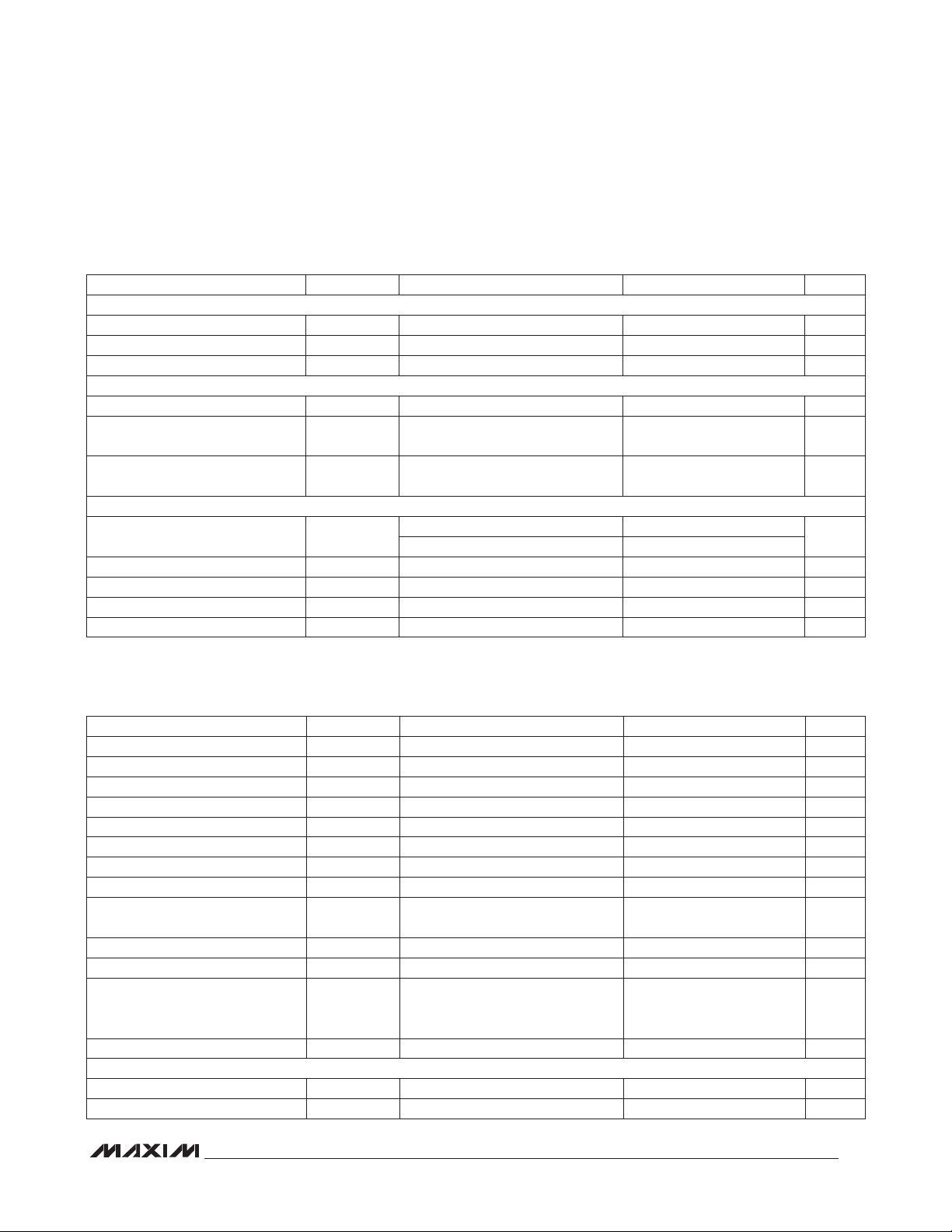
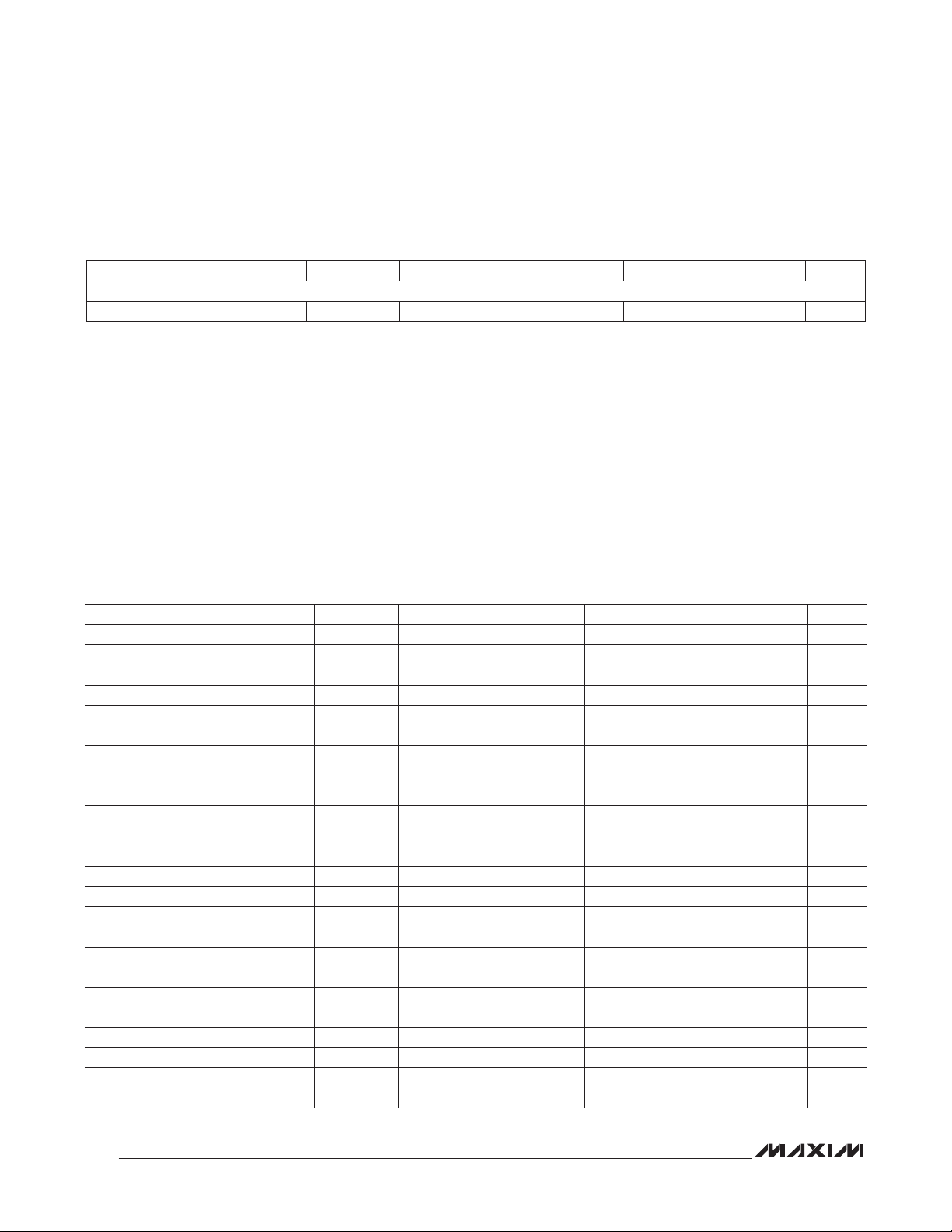
RECOMMENDED DC OPERATING CONDITIONS
(VDD = 1.7V to 3.6V, TA = -40NC to +85NC, unless otherwise noted. Typical values are at TA = +25NC and VDD = 3.3V, unless otherwise noted.) (Note 1)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
Supply Voltage V
1.8V Internal Regulator V
Power-On Reset Voltage V
Power-Fail Reset Voltage V
Power-Fail Warning Voltage V
Digital Overvoltage Detect V
Supply Current (Note 5)
Stop-Mode Current (Note 5)
DIGITAL I/O
Input High Voltage (P0, RST)
Input Hysteresis V
Input Low Voltage (P0, RST)
Output Low Voltage (P0, RST)
(Note 7)
Output High Voltage (P0, RST)
Input Leakage Current I
Input/Output Pin Capacitance C
Input Low Current for All Pins I
RST Pullup Resistor
DD
REG18
POR
RST
PFW
HV
I
DD1
I
DD2
I
STOP1
I
STOP2
I
STOP3
I
STOP4
V
IH
IHYS
V
IL
V
OL
V
OH
L
IO
IL
R
RST
(Note 2) 1.64 1.695 V
(Notes 3, 4) 1.75 1.85 V
Monitors V
Device is executing
from flash
TA = +25NC, CPU not backed up
TA = +85NC, CPU not backed up
TA = +25NC, CPU backed up
TA = +85NC, CPU backed up
(Note 6) 0.3 V
VDD = 3.6V, IOL = 4mA (Note 6) 0.4
VDD = 1.85V, IOL = 4mA 0.4
IOH = -2mA
Internal pullup disabled -100 +100 nA
(Note 6) 15 pF
V
= 0.4V, pullup enabled -70
IN
Continuous Power Dissipation (TA = +70NC)
Single-Layer Board (derate 16.9mW/NC above +70NC) .. 1349.1mW
Multilayer Board (derate 25mW/NC above +70NC) ....2000mW
Operating Temperature Range .......................... -40NC to +85NC
Storage Temperature Range ............................ -65NC to +150NC
Lead Temperature (soldering, 10s) ................................+300NC
Soldering Temperature (reflow) ......................................+260NC
V
RST
3.3 3.6 V
1.62 1.8 1.98 V
1.0 1.42 V
REG18
f
= 6MHz 3.5
SYS
f
= 1MHz 0.8
SYS
2.4 2.8 V
5
7.5
6.5
9
0.7 x
V
DD
V
GND
VDD -
0.4
65
V
DD
0.3 x
V
DD
V
DD
Q20% kI
mA
FA
V
V
V
V
FA
4
Page 5
1-Wire and SPI Authentication Microcontroller
RECOMMENDED DC OPERATING CONDITIONS (continued)
(VDD = 1.7V to 3.6V, TA = -40NC to +85NC, unless otherwise noted. Typical values are at TA = +25NC and VDD = 3.3V, unless otherwise noted.) (Note 1)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
INTERNAL OSCILLATOR
Oscillator Frequency f
Oscillator Startup Time t
OSC
OSC_RDYVREG18
= 1.8V (Note 6) 350
Oscillator Duty Cycle (Note 6) 45 55 %
NANOPOWER RING OSCILLATOR
Nanopower Ring Frequency f
Nanopower Ring Current I
Wakeup Timer Interval t
NANO
NANO
WAKEUP
TA = +25NC
Typical at VDD = 3.0V, active
during wake-up (Note 6)
1/f
NANO
FLASH MEMORY
Flash Erase Time
Flash Programming Time per Word t
PROG
Mass erase 20 40
Page erase 20 40
Write/Erase Cycles 1000 Cycles
Data Retention
Analog Supply Voltage V
AVDD
TA = +25NC
5 6 7 MHz
3 11 22 kHz
120 400 nA
t
NANO
65,535
x t
NANO
20 40
100 Years
V
DD
Fs
s
ms
Fs
V
MAXQ1004
10-BIT ADC PERFORMANCE
(VDD = 1.7V to 3.6V, V
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
Resolution 10 Bits
ADC Clock Frequency f
ADC Clock Period t
AN0 Input Voltage Range V
Analog Input Capacitance C
Integral Nonlinearity INL (Note 6)
Differential Nonlinearity DNL No missing codes over temperature
Offset Error V
ADC Active Current Consumption I
ADC Setup Time t
ADC Output Latency t
ADC Settling Time t
ADC Throughput f
TEMPERATURE SENSOR
Temperature Sensor Setup Time t
Temperature Sensor Error
= 1.845V, TA = -40NC to +85NC, unless otherwise noted.)
REF
ACLK
ACLK
AN0
AIN
OS
ADC
ADC_SETUP
ADC
ACLK = 6MHz, internal reference
on, ADEN = 1 (Note 6)
Settling time due to channel, refer-
ADC_SETTLE
ence or scale change (not production tested)
ADC
TSN_SETUP
D
TSN
V
GND
f
SYSCLK
1/f
ACLK
V
AVDD
1 pF
Q2
Q1
Q2
100 150
25
1025 t
10
f
ADC/tADC
25
Q6 NC
MHz
ACLK
ksps
Fs
V
LSB
LSB
LSB
FA
Fs
Fs
Fs
5
Page 6
1-Wire and SPI Authentication Microcontroller
10-BIT ADC PERFORMANCE (continued)
(VDD = 1.7V to 3.6V, V
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
10-BIT ADC REFERENCE VOLTAGE
Internal Reference Voltage V
Note 1: Specifications to -40NC are guaranteed by design and are not production tested.
Note 2: The power-fail reset and POR detectors operate in tandem so one or both of these signals are active at all times when
VDD < V
Note 3: The power-fail warning monitor and the power-fail reset monitor track each other with a typical delta between the two of 0.13V.
MAXQ1004
Note 4: Writes to flash memory must not be performed when the supply voltage drops below the power-fail warning levels, as
RST
there is uncertainty in the duration of continuous power supply. The user application should check the status of the powerfail warning flag before writing to flash to ensure valid write operations.
Note 5: Measured on the combined AVDD and VDD pins and the part not in reset. All inputs are connected to GND or VDD.
Outputs do not source/sink any current.
Note 6: Guaranteed by design and not production tested.
Note 7: The maximum total current, I
mum specified voltage drop.
SPI ELECTRICAL CHARACTERISTICS
(VDD = 1.7V to 3.6V, TA = -40NC to +85NC, unless otherwise noted. AC electrical specifications are guaranteed by design and are
not production tested.)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
SPI Master Operating Frequency 1/t
SPI Slave Operating Frequency 1/t
SPI I/O Rise/Fall Time t
SCLK Output Pulse-Width High/Low t
MOSI Output Hold Time After SCLK
Sample Edge
MOSI Output Valid to Sample Edge t
MISO Input Valid to SCLK Sample
Edge Rise/Fall Setup
MISO Input to SCLK Sample Edge
Rise/Fall Hold
SCLK Inactive to MOSI Inactive t
SCLK Input Pulse-Width High/Low t
SSEL Active to First Shift Edge
MOSI Input to SCLK Sample Edge
Rise/Fall Setup
MOSI Input from SCLK Sample
Edge Transition Hold
MISO Output Valid After SCLK Shift
Edge Transition
SSEL Inactive
SCLK Inactive to SSEL Rising
MISO Output Disabled After SSEL
Edge Rise
= 1.845V, TA = -40NC to +85NC, unless otherwise noted.)
REF
IREF
1.845
, ensuring the device maintains the reset state until minimum operating voltage is achieved.
OH(MAX)
SPI_RF
MCH
t
SCH
and I
MCK
SCK
, t
MOH
MOV
t
MIS
t
MIH
MLH
, t
t
SSE
t
SIS
t
SIH
t
SOV
t
SSH
t
SD
t
SLH
OL(MAX)
MCL
SCL
, for all outputs combined should not exceed 35mA to satisfy the maxi-
CL = 15pF, pullup = 560W
8.3 23.6 ns
t
/2 - t
MCK
t
MCK
t
MCK
/2 - t
/2 - t
SPI_RF
SPI_RF
SPI_RF
25 ns
0 ns
t
/2 - t
MCK
tCK + t
t
SPI_RF
t
SPI_RF
t
SPI_RF
t
SPI_RF
SPI_RF
SPI_RF
t
/2 ns
SCK
2tCK + 2t
Q5%
f
SYSCLK
f
SYSCLK
2t
SPI_RF
SPI_RF
/2 MHz
/4 MHz
V
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
ns
6
Page 7

1-Wire and SPI Authentication Microcontroller
SPI Master Communications Timing
SHIFT SAMPLE SHIFT SAMPLE
SSEL
(SAS = 0)
t
MCK
1/0
0/1
SCLK
CKPOL/CKPHA
1/0
0/1
MAXQ1004
SCLK
CKPOL/CKPHA
MOSI
MISO
1/1
0/0
t
MCH
t
MOH
MSB MSB-1
t
MIS
MSB MSB-1
t
MCL
t
MOV
1/1
0/0
t
RF
LSB
t
MIH
LSB
t
MLH
SPI Slave Communications Timing
SHIFT SAMPLE SHIFT SAMPLE
t
SSEL
(SAS = 1)
SCLK
CKPOL/CKPHA
1/0
0/1
t
SSE
t
SCK
SSH
t
SD
1/0
0/1
SCLK
CKPOL/CKPHA
MOSI
MISO
1/1
0/0
t
SCH
t
SIS
MSB MSB-1
MSB MSB-1
t
SCL
t
SOV
1/1
0/0
t
SIH
LSB
t
RF
LSB
t
SLH
7
Page 8

1-Wire and SPI Authentication Microcontroller
Pin Configuration
TOP VIEW
MAXQ1004
AVDD
GND
REG18
V
AN0
AVREF
12 11 9
13
14
15
16
DD
+
1 2
RST
MAXQ1004
DQ
10
EP
4
3
P0.0/INT0/MOSI P0.7/INT7/TDO
P0.6/INT6/TMS
8
7
6
5
P0.1/INT1/MISO
P0.5/INT5/TDI/T0G
P0.4/INT4/TCK/T0
P0.3/INT3/SSEL
P0.2/INT2/SCLK
TQFN
(4mm × 4mm)
Pin Description
PIN NAME FUNCTION
POWER PINS
11 AN0 Analog Input 0. This pin is the analog input to the ADC.
12 AVREF Analog Voltage Reference. Do not connect anything external to this pin.
13 AVDD Analog Supply Voltage. Directly connect AVDD to DVDD.
14 GND Digital Ground
15 REG18
16 V
DD
— EP Exposed Pad. Connect the EP to the ground plane.
1
RST
Regulator Capacitor. This pin must be connected to ground through an external 1FF low ESR
(< 5I) capacitor.
Digital Supply Voltage. +3.3V nominal supply voltage.
RESET AND STATUS PINS
Active-Low Reset. This bidirectional pin recognizes external active-low reset inputs and
employs an internal pullup resistor to allow for a combination of wired-OR external reset
sources. This pin also acts as an output when the source of the reset is internal to the device
(e.g., watchdog timer, power-fail, etc.). In this case, the pin is low while the processor is in a
reset state, and it returns high as the processor exits this state.
8
Page 9

1-Wire and SPI Authentication Microcontroller
Pin Description (continued)
PIN NAME FUNCTION
GENERAL-PURPOSE I/O PINS
General-Purpose, Digital I/O, Type D Port/SPI Interface/JTAG Interface/External EdgeSelectable Interrupt. This port functions as 8-bit I/O and as an alternate interface to external
interrupts. Each interrupt can be individually enabled and the active edge can be selected.
The default reset condition of the pins is as a weak pullup input. To drive port 0 as output, the
port direction register must be programmed to enable output. P0.7–P0.4 default to their JTAG
P0.0–P0.7,
INT0–INT7,
3–10
MOSI, MISO,
SCLK, SSEL,
TCK, TDI,
TMS, TDO
2 DQ
function on any reset.
PIN PORT
EXTERNAL
INTERRUPT
SPECIAL FUNCTION
3 P0.0 INT0 MOSI: Master Out-Slave In (SPI)
4 P0.1 INT1 MISO: Master In-Slave Out (SPI)
5 P0.2 INT2 SCLK: Slave Clock (SPI)
6 P0.3 INT3
SSEL: Active-Low Slave Select (SPI)
7 P0.4 INT4 TCK: Test Clock (JTAG)/T0
8 P0.5 INT5 TDI: Test Data In (JTAG)/T0G
9 P0.6 INT6 TMS: Test Mode Select (JTAG)
10 P0.7 INT7 TDO: Test Data Out (JTAG)
1-Wire Slave Interface, I/O. This 5V tolerant, open-drain I/O pin serves as both transmit and
receive pin for the 1-Wire interface. The DQ pin requires an external pullup resistor, the value
of which is determined by the speed mode.
MAXQ1004
Block Diagram
16KB FLASH MEMORY
INTERNAL
REFERENCE
10-BIT ADC
TEMP
SENSOR
AES ENCRYPTION
ENGINE
RANDOM-NUMBER
GENERATOR
640B DATA SRAM
4KB UTILITY ROM
MAXQ RISC
WATCHDOG TIMER
INTERNAL
6MHz
OSCILLATOR
CPU
VOLTAGE
MONITOR
GND +1.7V TO +3.6V
MAXQ1004
TIMER 0
1-Wire
INTERFACE
JTAG
SPI
GPIO
(UP TO 8)
9
Page 10

1-Wire and SPI Authentication Microcontroller
Detailed Description
The MAXQ1004 is a low-power, high-performance, 16-bit
MAXQ microcontroller providing the high security and
reliability demanded in today’s portable electronics, battery chargers, and battery packs. An ISO/IEC 9797-1
standards-based authentication protocol is available as
standard application code.
A 1-Wire communication interface minimizes batterypack connections required to authenticate and monitor
MAXQ1004
battery health. The 1-Wire I/O pin (DQ) can wake the
device from low-power stop mode. In stop mode, power
is supplied only to the circuitry required to wake up the
slave microcontroller. During stop mode, 512 bytes of
data memory are preserved, with an option to preserve
the CPU state and the remaining 128 bytes of data
memory.
MAXQ Core Architecture
The microcontroller is based on a low-power implementation of the 16-bit MAXQ family of RISC cores. The core
supports the Harvard memory architecture with separate
16-bit program and data address buses. A fixed 16-bit
instruction word is standard, but data can be arranged in
8 or 16 bits. The core is implemented as a pipelined processor with performance approaching 1MIPS per MHz.
The 16-bit data path is implemented around register
modules, and each register module contributes specific
functions to the core. The accumulator module consists
of sixteen 16-bit registers and is tightly coupled with the
arithmetic logic unit (ALU).
Execution of instructions is triggered by data transfer
between functional register modules or between a functional register module and memory. Because data movement involves only source and destination modules,
circuit-switching activities are limited to active modules
only. For power-conscious applications, this approach
localizes power dissipation and minimizes switching
noise. The modular architecture also provides a maximum of flexibility and reusability that is important for a
microprocessor used in embedded applications.
The MAXQ instruction set is highly orthogonal. All arithmetical and logical operations can use any register
in conjunction with the accumulator. Data movement
is supported from any register to any other register.
Memory is accessed through specific data-pointer registers with automatic increment/decrement support.
Memory Organization
There are three distinct memory areas: registers, program memory, and data memory. All registers are
located on-chip. The device contains built-in program
and data memory, including:
• 16KB flash memory, in-application programmable
• 640B of data RAM
• 4KB of ROM
Program flash memory is arranged in 1024-byte pages
that can be individually erased and programmed through
the use of utility ROM functions.
Utility ROM
The utility ROM is a block of internal ROM that defaults to
a starting address of 8000h. The utility ROM consists of
subroutines that can be called from application software.
These include the following:
• In-system programming using a bootstrap loader
• Test routines (internal memory tests, memory loader,
etc.)
• User-callable routines for in-application flash programming and fast table lookup
Following any reset, execution begins in the utility ROM.
The ROM software determines whether the program
execution should immediately jump to location 0000h,
the start of application code, or to one of the special
routines mentioned. Routines within the utility ROM are
user-accessible and can be called as subroutines by the
application software. More information on the utility ROM
functions is contained in the MAXQ1004 User’s Guide.
Some applications require protection against unauthorized viewing of program code memory. For these
applications, access to in-system programming, inapplication programming, or in-circuit debugging functions is prohibited until a password has been supplied.
The password is defined as the 16 words of physical
program memory at addresses 0010h–001Fh.
A single password lock (PWL) bit is implemented in
the SC register. When the PWL is set to one (POR
default) and the contents of the memory at addresses
0010h–001Fh are any value other than FFh or 00h, the
password is required to access the utility ROM, including in-circuit debug and in-system programming routines
that allow reading or writing of internal memory. When
PWL is cleared to zero, these utilities are fully accessible
without the password. The password is automatically set
to all ones following a mass erase.
10
Page 11

1-Wire and SPI Authentication Microcontroller
Loading Flash Memory with
the Bootstrap Loader
An internal bootstrap loader allows the device to be
reloaded over a simple JTAG interface. As a result, software can be upgraded in-system, eliminating the need
for a costly hardware retrofit when updates are required.
Remote software uploads are possible that enable
physically inaccessible applications to be frequently
updated. If in-system programmability is not required,
a commercial gang programmer can be used for mass
programming.
In-Application Flash Programming
From user-application code, internal flash memory can
be programmed/erased by calling internal ROM utility
functions from either C or assembly language. Memory
protection is enforced by the ROM utility functions. The
function declarations below show examples of some of
the ROM utility functions provided for in-application flash
memory programming.
/* Write one 16-bit word to code address ‘dest’.
* Dest must be aligned to 16 bits.
* Returns 0 = failure, 1 = OK.
*/
int flash_write16(uint16_t dest, uint16_t data);
To erase, the following function would be used:
/* Erase the given Flash page
* addr: Flash offset (anywhere within page)
*/
int flash_erasepage(uint16_t addr);
Code Scrambling
Automated code scrambling protects user-code memory against attempts to determine the code contents.
The proprietary scrambling algorithm is transparent to
the user and still allows in-application programming.
Address shuffling prevents well-known startup code from
always being at the known location 0000h and interrupt
vector code at known locations. This obfuscates confidential software and makes the application secure from
hackers and copiers.
ADC
The 10-bit delta-sigma analog-to-digital converter (ADC)
allows the application to measure external voltages,
most commonly the voltage of the batteries driving VDD.
The analog input, AN0, can be optionally scaled by 50%
for direct supply voltage measurement. The ADC value
saturates (all data bits read 1) when the input voltage
exceeds the maximum allowable ADC reference voltage.
The internal temperature sensor is measured by the ADC
when selected.
Each conversion can choose its own reference from
AVDD or the internal reference. Data can be retrieved
in either left-justified or right-justified format, giving the
application direct control on data format.
A conversion takes 1025 ADCCLK cycles to complete. The ADCCLK is derived from the system clock
with divide ratio defined by the ADC clock-divider bits
(ADCCLK). Therefore, with 1025 ADCCLK to acquire
one data, the fastest ADC rate = Sysclk/1025 (ADCCLK
= 0h). See Figure 1.
Temperature Sensor
An integrated temperature sensor measures the internal
temperature of the device with an error of Q6NC. The temperature sensor is connected to channel 1 of the ADC.
To read the temperature sensor, select ADCH to 1.
Nanopower Ring Wake-Up Timer
A nanopower-ring oscillator can be used to drive a
wake-up timer that causes the device to exit stop mode
after a user-selectable time period. The wake-up timer is
software programmable in 16-bit steps of the nanopower
ring clock up to approximately 8 seconds.
Serial Number/Device ID
Each device has a factory-programmed, unique, 64-bit
device identification number (ID). This ID ensures device
traceability and serves as an input to the device’s
authentication protocol.
The first 8 bits of the device ID are a 1-Wire family code
that is the same for all MAXQ1004 devices. The next 48
bits are a factory-programmed unique serial number.
Even if multiple devices are used in a 1-Wire network, the
unique, 48-bit serialization field prevents any address
conflict, allowing communication with each device individually. The last 8 bits are a factory-programmed cyclic
redundancy check (CRC) of the first 56 bits. The 1-Wire
CRC is generated using a polynomial generator consisting of a shift register and XOR gates. The polynomial is
x8 + x5 + x4 + 1.
MAXQ1004
11
Page 12

1-Wire and SPI Authentication Microcontroller
ADCH
ADSCL
ADEN
ADCONV
ADCCLK
ADDATA
ADREF
1
10-BIT
DELTA-SIGMA
CONVERTER
/2
0
1
AN0
TEMP
SENSOR
MAXQ1004
INTERNAL REFERENCE
ADC
CONTROLLER
AVDD
Figure 1. ADC Block Diagram
0
Hardware AES Engine
The AES engine is a bidirectional block cipher supporting encryption and decryption for all three key lengths
recommended by the National Institute of Standards and
Technology (NIST). Secret keys can be generated by
an on-chip RNG and stored in a predetermined memory
location. The AES engine operates independently of the
processor, except for setting up an operation through
the AES Control register (AESC). The AESC register
provides AES engine operation status and option control.
The AES engine shares the cryptographic memory with
the 1-Wire communications peripheral. Application software must ensure that the two peripherals do not access
the cryptographic memory at the same time or data in
the memory may be corrupted. Application software can
interrogate activity bits to ensure that one peripheral
does not interrupt the other. To perform an encryption
or decryption, the keys and data are loaded into the
cryptographic memory and the operation is started with
the appropriate write to the AESC register. Completion
of the operation can be detected by user firmware either
by polling the AESC register or through the use of an
interrupt.
The AES engine displays excellent performance. Based
on key size, the following encryption throughputs are
achieved:
• 128-bit key size—55 cycles (9.2µs at 6MHz)
• 192-bit key size—70 cycles (12.0µs at 6MHz)
• 256-bit key size—75 cycles (12.5µs at 6MHz)
An optional jitter injection feature reduces the effectiveness of differential power analysis (DPA) attacks
against the device. Adding jitter causes random delays
in both the start and ending times of the calculation,
confounding attempts to determine the values in the AES
operation by measuring minute power fluctuations. When
active, the feature adds a variable random delay of 0
to 30 clock cycles to AES calculations. This is accomplished by randomly adding 0 to 15 clock cycles before
the AES operation is started, and adding 0 to 15 clock
cycles after the operation is complete.
Watchdog Timer
The watchdog timer functions as the source of both the
timer timeout and the watchdog timer reset. The timeout
period can be programmed in a range of 212 to 229 system clock cycles. An interrupt is generated when the timeout period expires, if the interrupt is enabled. All watchdog
timer resets follow the programmed interrupt timeouts by
512 clock cycles. If the watchdog timer is not restarted
for another full interval in this time period, a system reset
occurs when the reset timeout expires. Table 1 shows
values that demonstrate the various interrupt timeouts
based on an internal clock frequency of 6MHz.
12
Page 13

1-Wire and SPI Authentication Microcontroller
Table 1. Watchdog Interrupt Timeout
PMME CD[1:0]
0 00
0 01 2
0 10 2
0 11 2
1 xx 2
WD[1:0] = 00 WD[1:0] = 01 WD[1:0] = 10 WD[1:0] =11
212 (683Fs)
13
(1.36ms) 216 (11ms) 2
14
(2.73ms) 2
15
(5.46ms) 2
20
(175ms) 2
WATCHDOG INTERRUPT TIMEOUT (Sysclk = 6MHz)
15
2
(5.46ms) 2
17
(21.8ms) 2
18
(43.7ms) 2
23
(1.4s) 2
18
(43.7ms) 2
19
(87.4ms) 222 (700ms)
20
(175ms) 2
21
(350ms) 2
26
(11.2s) 2
21
(350ms)
23
24
29
(1.4s)
(2.8s)
(89.5s)
MAXQ1004
16-Bit Timer/Counter
The microcontroller has one instance of the 16-bit Timer
0 timer/counter peripheral, which supports the following
functions:
• 13-bit timer/counter
• 16-bit timer/counter
• 8-bit timer with autoreload
• 2 8-bit timer/counters
Serial Peripherals
Serial Peripheral Interface (SPI)
The integrated SPI is an independent serial communication channel that communicates synchronously with
peripheral devices in a multiple-master or multiple-slave
system. The interface allows access to a 4-wire, fullduplex serial bus and can be operated in either master
mode or slave mode. Collision detection is provided
when two or more masters attempt a data transfer at the
same time.
The maximum SPI master transfer rate is Sysclk/2. When
operating as an SPI slave, the device can support up to
Sysclk/4 SPI transfer rate. Data is transferred as an 8-bit
or 16-bit value, MSB first. In addition, the SPI module
supports configuration of an active SSEL state through
the slave active select.
1-Wire Bus System
The 1-Wire bus is a system that has a single bus master
and one or more slaves. This microcontroller is always
a slave device in any system. The bus master is typically another microcontroller. The discussion of this bus
system is broken down into three topics: hardware configuration, transaction sequence, and 1-Wire signaling
(signal types and timing). The 1-Wire protocol defines
bus transactions in terms of the bus state during specific
time slots, which are initiated on the falling edge of sync
pulses from the bus master. Refer to Application Note
937: Book of iButton® Standards for a more detailed
description the 1-Wire network and protocols.
The device permits the use of lower 1-Wire voltage levels
(as low as 1.7V) to support the device’s full operating
voltage, but can still be connected to a regular 1-Wire
bus of up to 6V.
Hardware Configuration
The 1-Wire bus has only a single data line (DQ); all
devices on the bus must be able to drive it at the appropriate time. This means that each device attached to the
1-Wire bus must have open-drain or high-impedance
outputs. The 1-Wire port is open drain.
Both the standard and overdrive communication speed
of 15.4kbps (max) and 111kbps (max), respectively,
are supported. The value of the pullup resistor primarily depends on the network size and load conditions.
Recommended pullup resistor values can be found in
Table 4-1 of Application Note 937: Book of iButton®
Standards.
The idle state for the 1-Wire bus is high. If, for any reason, a transaction needs to be suspended, the bus must
remain in the idle state if the transaction is to resume. If
this does not occur and the bus is left low for more than
120Fs (standard speed), one or more devices on the bus
can be reset.
iButton is a registered trademark of Maxim Integrated
Products, Inc.
13
Page 14

1-Wire and SPI Authentication Microcontroller
Slave Functionality
The 1-Wire slave provides three functions. The first is
that of a totally independent slave function, which can
be externally accessed at any time to verify its identity.
The 1-Wire front-end functions in an identical fashion to
that of the DS1990 serial ID to verify the serial ID number.
The bus master must provide one of the ROM function
commands:
• Read ROM
MAXQ1004
• Match ROM
• Search ROM
• Skip ROM
• Overdrive-Skip ROM
• Overdrive-Match ROM
• Resume
The second function is that of a 1-Wire that includes full
bidirectional data flow and data flow control. The 1-Wire
functions that become accessible after a ROM function
command is successfully executed initiate communications with the microcontroller through the use of specific
1-Wire commands:
• Read I/O Buffer
• Write I/O Buffer
• Read Command Buffer
• Write Command Buffer
• Read Command Buffer Extended
• Write Command Buffer Extended
• Status Register Read
• Status Register Write
The third function controls the operation of the 1-Wire
interface:
• 1-Wire Micro Reset
And the remaining are 1-Wire run commands:
• Start Program
• Continue Program
• Write Command Buffer Extended and Start Program
• Write Command Buffer Extended and Continue Program
Operating Modes
The low-power mode of operation is stop mode. In this
mode, CPU state and memories are preserved, but the
CPU is not actively running. Wake-up sources include
external I/O interrupts, the power-fail warning interrupt,
a valid 1-Wire command received, or a power-fail reset.
Any time the microcontroller is in a state where code
does not need to be executed, the user software can
enter stop mode.
An even lower stop mode is the data-retention mode,
in which the CPU is not active. When the data-retention
mode option is invoked (DRET = 1) and the regulator is disabled (REGEN = 0), only the first 512 bytes
of data memory is retained (data memory word offset
0000h–00FFh). CPU status and 1-Wire/AES memory are
powered down and contents are lost. A POR occurs
when exiting stop mode from data-retention mode. This
mode can be exited from any of the following enabled
interrupt sources:
• Enabled external interrupts
• External reset
• Enabled PFW interrupt
• Valid 1-Wire command received
• Wake-up timer
The wake-up timer causes the device to exit stop mode
after a user-selectable time period. The power-fail monitor is always on during normal operation. However, it can
be selectively disabled during stop mode using the power-fail monitor disable (PFD) bit in the PWCN register. By
default, the power-fail monitor function is enabled during
stop mode. If power-fail monitoring is disabled (PFD = 1)
during stop mode, the circuitry responsible for generating a power-fail warning or reset is shut down and neither
condition is detected. Thus, the VDD < V
does not invoke a reset state. However, in the event that
VDD falls below the POR level, a POR is generated. The
power-fail monitor is enabled prior to stop mode exit and
before code execution begins. If a power-fail warning
condition (VDD < V
interrupt flag is set on stop mode exit. If a power-fail condition is detected (VDD < V
The 1-Wire peripheral can operate in a special mode
that draws minimal power, yet can serve as a wakeup source to bring the device out of stop mode. If the
1-Wire peripheral is required to run in stop mode, it can
be enabled so a regular 1-Wire reset pulse briefly wakes
up the 1-Wire controller. The 1-Wire controller then determines if it was addressed. If so, the 1-Wire controller
wakes up the CPU from stop mode. If the microcontroller
is not being addressed, then stop mode continues and
the 1-Wire controller is powered down again, and the
device returns to its lowest power state. The device does
not respond to an overdrive reset pulse in stop mode.
) is then detected, the power-fail
PFW
), the CPU goes into reset.
RST
condition
RST
14
Page 15

1-Wire and SPI Authentication Microcontroller
In-Circuit Debug
Embedded debugging capability is available through
the JTAG-compatible test access port (TAP). Embedded
debug hardware and embedded ROM firmware provide
in-circuit debugging capability to the user application,
eliminating the need for an expensive in-circuit emulator.
See Figure 2. The in-circuit debug features include the
following:
• Hardware debug engine
• Set of debug service routines stored in the utility ROM
The embedded hardware debug engine is an independent hardware block in the microcontroller. The debug
engine can monitor internal activities and interact with
selected internal registers while the CPU is executing
user code. Collectively, the hardware and software features allow two basic modes of in-circuit debugging:
• Background mode allows the host to configure and set
up the in-circuit debugger while the CPU continues to
execute the application software at full speed. Debug
mode can be invoked from background mode.
• Debug mode allows the debug engine to take control
of the CPU, providing read/write access to internal
registers and memory and single-step trace operation.
DEBUG
SERVICE
MAXQ1004
TMS
TCK
TDI
TDO
Figure 2. In-Circuit Debugger
TAP
CONTROLLER
ROUTINES
(UTILITY ROM)
CPU
DEBUG
ENGINE
CONTROL
BREAKPOINT
ADDRESS
DATA
Applications Information
Grounds and Bypassing
Careful PCB layout significantly minimizes crosstalk
among the high-speed external address/data bus signals and with digital I/O that could cause improper
operation. The use of multilayer boards is essential to
allow the use of dedicated power planes. Bypass VDD
on each microcontroller with a 0.1FF capacitor located
as close as possible to the pin.
Design Guidelines for ESD Protection
CMOS design guidelines for any semiconductor require
that no pin be taken above VDD or below ground.
Violation of this guideline can result in a hard failure
(damage to the silicon inside the device) or a soft failure
(unintentional modification of memory contents). Voltage
spikes above or below the device’s absolute maximum
ratings can cause a temporary brownout of the internal
power rail, possibly corrupting memory.
Microcontrollers commonly experience negative voltage spikes through either their power pins or generalpurpose I/O pins. Negative voltage spikes on power pins
are especially problematic as they directly couple to the
internal power buses. Devices such as keypads can
conduct electrostatic discharges directly into the microcontroller and seriously damage the device. System
designers must protect components against these transients that can corrupt system memory.
In a practical application, it is difficult to remove all voltages above VDD or below ground. Undershoots of 0.3V
can be tolerated by the microcontroller, and 5V tolerant
pins can accept up to 5.5V. Figure 3 demonstrates a
diode protection scheme that can be used to protect the
I/O pins of a microcontroller. The scheme relies on the
use of a Schottky diode and current limiting resistor to
reduce the effect of current spikes on the device. When
the voltage approaching the device pin exceeds VDD
or GND by more than 0.1V to 0.2V, the Schottky diodes
become forward biased, conducting the excess voltage
away from the device pins. The current limiting resistors
also help dampen the effect of the voltage spike on the
microcontroller.
MAXQ1004
15
Page 16

1-Wire and SPI Authentication Microcontroller
MAXQ1004
EXTERNAL CONNECTION
EXPOSED TO ESD
LOW-LEAKAGE
SCHOTTKY DIODE
Figure 3. I/O Protection
Any Schottky diode used should have a leakage well
below the maximum drive current of the sourcing device.
Diodes with low reverse leakage currents are available
from many vendors.
Additional Documentation
Designers must have the following documents to fully
use all the features of this device. This data sheet
contains pin descriptions, feature overviews, and electrical specifications. Errata sheets contain deviations
from published specifications. The user’s guides offer
detailed information about device features and operation. The following documents can be downloaded from
www.maxim-ic.com/microcontrollers.
• This MAXQ1004 data sheet, which contains electrical/
timing specifications, pin descriptions, and package
information.
• The MAXQ1004 revision-specific errata sheet
(www.maxim-ic.com/errata).
• The MAXQ1004 User’s Guide, which contains detailed
information on core features and operation, including
programming.
1kΩ
V
DD
I/O
GND
USER APPLICATION
I/O
I/O
I/O
I/O
µC
I/O
I/O
I/O
I/O
I/O
INTERNAL
CIRCUIT
INTERNAL
CIRCUIT
NOT SUBJECT TO
NEGATIVE VOLTAGE OR ESD
Development and
Technical Support
Maxim and third-party suppliers provide a variety of
highly versatile, affordably priced development tools for
this microcontroller, including the following:
• Compilers
• In-circuit emulators
• Integrated Development Environments (IDEs)
• Serial-to-JTAG converters for programming and
debugging.
A partial list of development tool vendors can be found
at www.maxim-ic.com/MAXQ_tools.
For technical support, go to https://support.maxim-ic.
com/micro.
Typical Application Circuit
The 1-Wire interface can be used to authenticate a
3-contact battery pack and also measure the battery
voltage and temperature. See Figure 4 for a typical application circuit.
16
Page 17

1-Wire and SPI Authentication Microcontroller
FACTORY-ISSUE
PACK+
PROTECTOR
150Ω
1-Wire
ORIGINAL BATTERY PACK
DQ
MAXQ1004
V
DD
AVDD
REG18
1kΩ
AN0
GND
MAXQ1004
100nF
PACK-
1µF
Figure 4. Typical Application Circuit
Package Information
For the latest package outline information and land patterns, go to www.maxim-ic.com/packages. Note that a “+”, “#”, or “-” in the
package code indicates RoHS status only. Package drawings may show a different suffix character, but the drawing pertains to the
package regardless of RoHS status.
PACKAGE TYPE PACKAGE CODE DOCUMENT NO.
16 TQFN-EP T1644+4
21-0139
17
Page 18

1-Wire and SPI Authentication Microcontroller
Revision History
REVISION
NUMBER
0 4/10 Initial release —
REVISION
DATE
MAXQ1004
DESCRIPTION
PAGES
CHANGED
Maxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit patent licenses are implied.
Maxim reserves the right to change the circuitry and specifications without notice at any time.
18 Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 408-737-7600
©
2010 Maxim Integrated Products Maxim is a registered trademark of Maxim Integrated Products, Inc.
 Loading...
Loading...