

Page 1
For pricing, delivery, and ordering information, please contact Maxim/Dallas Direct! at
1-888-629-4642, or visit Maxim’s website at www.maxim-ic.com.
General Description
The MAX6690†is a precise digital thermometer that
reports the temperature of both a remote P-N junction
and its own die. The remote junction can be a diode-connected transistor—typically a low-cost, easily mounted
2N3904 NPN type or 2N3906 PNP type—that replaces
conventional thermistors or thermocouples. Remote
accuracy is ±2°C for multiple transistor manufacturers,
with no calibration needed. The remote junction can also
be a common-collector PNP, such as a substrate PNP of
a microprocessor (µP).
The 2-wire serial interface accepts standard System
Management Bus (SMBus
TM
), Write Byte, Read Byte,
Send Byte, and Receive Byte commands to program the
alarm thresholds and to read temperature data.
Measurements can be done automatically and
autonomously, with the conversion rate programmed by
the user, or programmed to operate in a single-shot
mode. The adjustable conversion rate allows the user to
optimize supply current and temperature update rate to
match system needs. When the conversion rate is faster
than 1Hz, the conversion results are available as a 7-bitplus-sign byte with a 1°C LSB. When the conversion rate
is 1Hz or slower, the MAX6690 enters the extended
mode. In this mode, 3 additional bits of temperature data
are available in the extended resolution register, providing 10-bit-plus-sign resolution with a 0.125°C LSB.
Single-shot conversions also have 0.125°C per LSB resolution when the conversion rate is 1Hz or slower.
A parasitic resistance cancellation (PRC) mode can also
be invoked for conversion rates of 1Hz or slower by setting bit 4 of the configuration register to 1. In PRC mode,
the effect of series resistance on the leads of the external
diode is canceled. The 11-bit conversion in PRC mode is
performed in <500ms and is disabled for conversion
rates faster than 1Hz. The one-shot conversion is also 11
bits in <500ms.
The MAX6690 default low-temperature measurement
limit is 0°C. This can be extended to -64°C by setting bit
5 of the configuration register to 1.
The MAX6690 is available in a small, 16-pin QSOP surface-mount package.
________________________Applications
Features
♦ High Accuracy ±2°C (max) from +70°C to +100°C
(Remote)
♦ 11-Bit, 0.125°C Resolution
♦ Dual Channel: Measures Remote and Local
Temperature
♦ No Calibration Required
♦ Programmable Under/Overtemperature Alarms
♦ I
2
C™-Compatible/SMBus Interface
♦ +3V to +5.5V Supply Range
MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
________________________________________________________________ Maxim Integrated Products 1
Pin Configuration
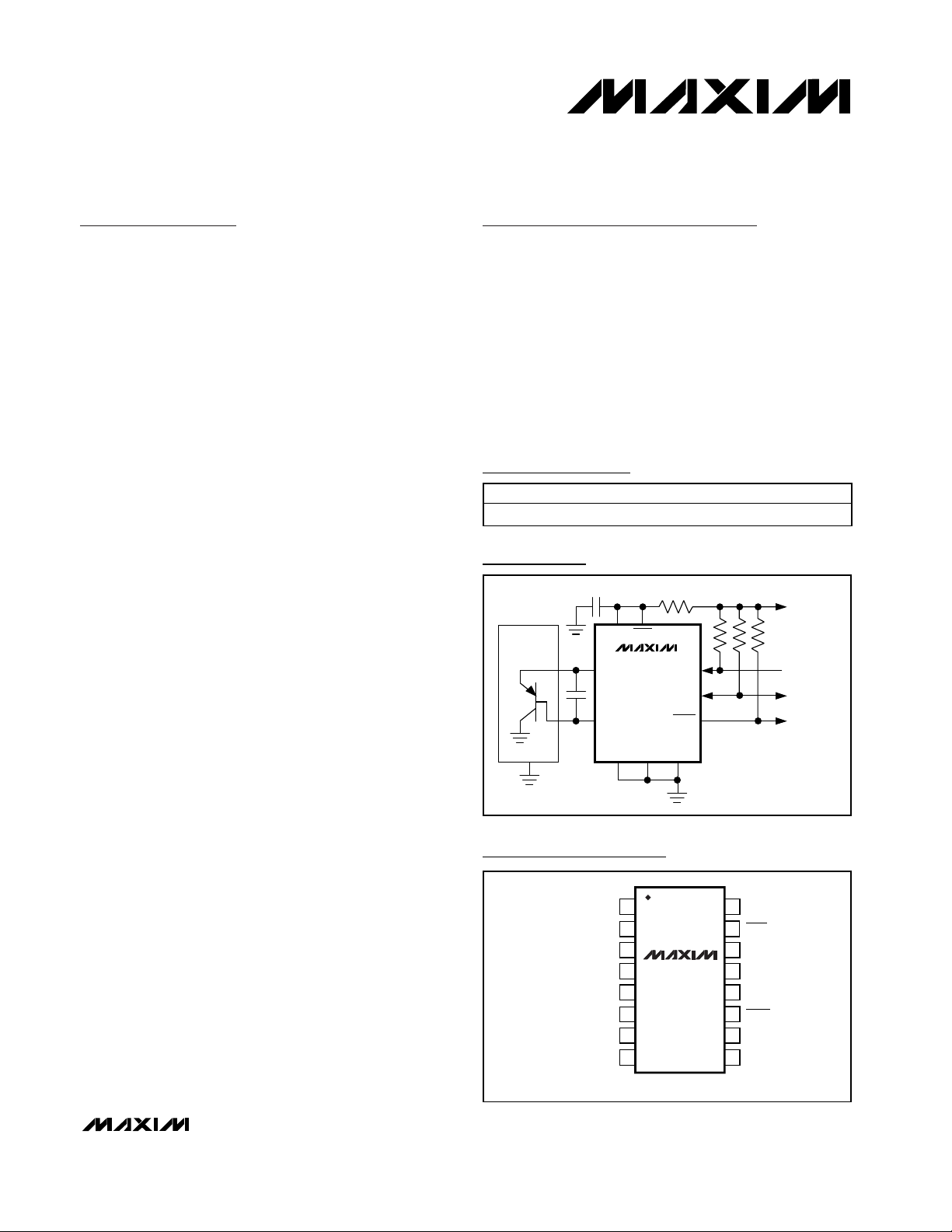
V
CC
DXP
CPU
DXN
STBY
10kΩ EACH
CLOCK
DATA
INTERRUPT TO µC
+3V TO +5V SUPPLY
200Ω
0.1µF
SMBCLK
SMBDATA
ALERT
GND
ADD0 ADD1
2200pF
MAX6690
Typical Operating Circuit
19-2190; Rev 0; 10/01
Ordering Information
Desktop Computers
Notebook Computers
Servers
Thin Clients
Workstations
Test and Measurement
Multichip Modules
SMBus is a trademark of Intel Corp.
I
2
C is a trademark of Philips Corp.
†
Patents pending.
PART TEMP. RANGE PIN-PACKAGE
MAX6690MEE
16 QSOP
-55°C to +125°C
TOP VIEW
1
N.C. N.C.
2
V
CC
DXP
3
MAX6690
4
DXN
N.C.
5
ADD1
6
GND
7
GND
8
QSOP
16
15
14
13
12
11
10
9
STBY
SMBCLK
N.C.
SMBDATA
ALERT
ADD0
N.C.
Page 2
MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
2 _______________________________________________________________________________________
ABSOLUTE MAXIMUM RATINGS
ELECTRICAL CHARACTERISTICS
(VCC= +3V to +5.5V, TA= -55°C to +125°C, unless otherwise noted. Typical values are at VCC= +3.3V and TA= +25°C.)
Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional
operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to
absolute maximum rating conditions for extended periods may affect device reliability.
(All voltages are referenced to GND unless otherwise noted.)
V
CC
..........................................................................-0.3V to +6V
DXP, ADD_ .................................................-0.3V to (V
CC
+ 0.3V)
DXN ......................................................................-0.3V to +0.8V
SMBCLK, SMBDATA, ALERT, STBY.. ......................-0.3V to +6V
SMBDATA, ALERT Current .................................-1mA to +50mA
DXN Current ......................................................................±1mA
ESD Protection (all pins, Human Body Model). .................2000V
Continuous Power Dissipation (T
A
= +70°C)
16-Pin QSOP (derate 8.30mW/°C above +70°C).........667mW
Operating Temperature Range ........................-55°C to +125°C
Junction Temperature......................................................+150°C
Storage Temperature Range ............................-65°C to +165°C
Lead Temperature (soldering, 10s) .................................+300°C
TEMPERATURE-TO-DIGITAL CONVERTER
Accuracy (Local Sensor)
Line Regulation 0.2 0.5 °C
Resolution (Legacy Mode) Conversion rate >1Hz
Resolution (Extended Mode) Conversion rate ≤1Hz
Undervoltage Lockout
Threshold
Undervoltage Lockout
Hysteresis
Supply Voltage Range V
Pow er -On Reset ( POR) Thr eshol d VCC, falling edge +1.5 +2.0 +2.5 V
POR Threshold Hysteresis +90 mV
Standby Current SMBus static +3 +10 µA
Operating Current During conversion +0.55 +1 mA
Average Operating Current
Conversion Time t
Conversion Timing Error ±25 %
Remote-Diode Current I
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
+60°C ≤ TA≤ +100°C, VCC = +3.3V -2.5 +2.5
0°C ≤ TA≤ +100°C, VCC = +3.3V -3.5 +3.5
≤ +120°C, VCC = +3.3V -5.0 +5.0
A
≤ +120°C, V CC = + 3.3V ( Notes 1, 2) -5 +5
RJ
+1 °C
+0.125 °C
input, disables A/D conversion,
+2.60 +2.80 +2.95 V
+3.0 +5.5 V
+95 +125 +156 ms
+8 Bits
+11 Bits
+90 mV
UVLO
CC
CONV
RJ
-55°C ≤ T
+70° C ≤ TRJ≤ + 100° C, V CC = + 3.3V ( Note 1) -2 +2
0°C ≤ TRJ≤ +100°C, VCC = +3.3V (Note 1) -3.5 +3.5Accuracy (Remote Sensor)
-55°C ≤ T
V
CC
rising edge
0.25 conversion/s (Note 3) +40 +70
2 conversion/s (Note 3) +150 +250
From stop bit to conversion completed, in
legacy mode (Note 3)
High level +80 +100 +120
Low level +8 +10 +12
°C
°C
µA
µA
Page 3
MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
_______________________________________________________________________________________ 3
ELECTRICAL CHARACTERISTICS (continued)
(VCC= +3V to +5.5V, TA= -55°C to +125°C, unless otherwise noted. Typical values are at VCC= +3.3V and TA= +25°C.)
Note 1: +25°C ≤ TA≤ +85°C.
Note 2: If both the MAX6690 and the remote junction are below T
A
= -20°C, then VCC> 3.15V.
Note 3: The conversion time doubles for the extended resolution mode. This causes the average operating current to approximately
double.
Note 4: The serial interface resets when SMBCLK is low for more than t
TIMEOUT
.
Note 5: Note that a transition must internally provide at least a hold time to bridge the undefined region (300ns max) of SMBCLK’s
falling edge.
Logic Input Low Voltage V
Logic Input High Voltage V
Input Leakage Current I
Output Low Sink Current I
Input Capacitance C
Output High Leakage Current VOH = +5.5V +1 µA
Serial Clock Frequency f
Bus Free Time Between STOP
and START Conditions
START Condition Setup Time +4.7 µs
Repeat START Condition Setup
Time
START Condition Hold Time t
STOP Condition Setup Time t
Clock Low Period t
Clock High Period t
Data Setup Time t
Data Hold Time t
Receive SCL/SDA Rise Time t
Receive SCL/SDA Fall Time t
SMBus Timeout t
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
VCC = +3.0V to +5.5V +0.8 V
IL
VCC = +3.0V +2.2
IH
VCC = +5.5V +2.6
LEAK
OL
IN
SCL
t
BUF
t
SU:STA
HD:STA
SU:STO
LOW
HIGH
SU:DAT
HD:DAT
R
F
TIMEOUT
VIN= GND or V
VOL = +0.6V +6
VOL= +0.4V +1
(Note 4) 0 +100 kHz
90% to 90% +50 µs
10% of SMBDATA to 90% of SMBCLK +4 µs
90% of SMBCLK to 10% of SMBDATA662 +4 µs
10% to 10% +4.7 µs
90% to 90% +4 µs
90% of SMBDATA to 10% of SMBCLK +250 ns
(Note 5) 0 µs
SMBDATA and SMBCLK time low for reset
of serial interface
CC
+5 pF
+4.7 µs
+25 +40 ms
±2µA
+1 µs
+300 ns
V
mA
Page 4
MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
4 _______________________________________________________________________________________
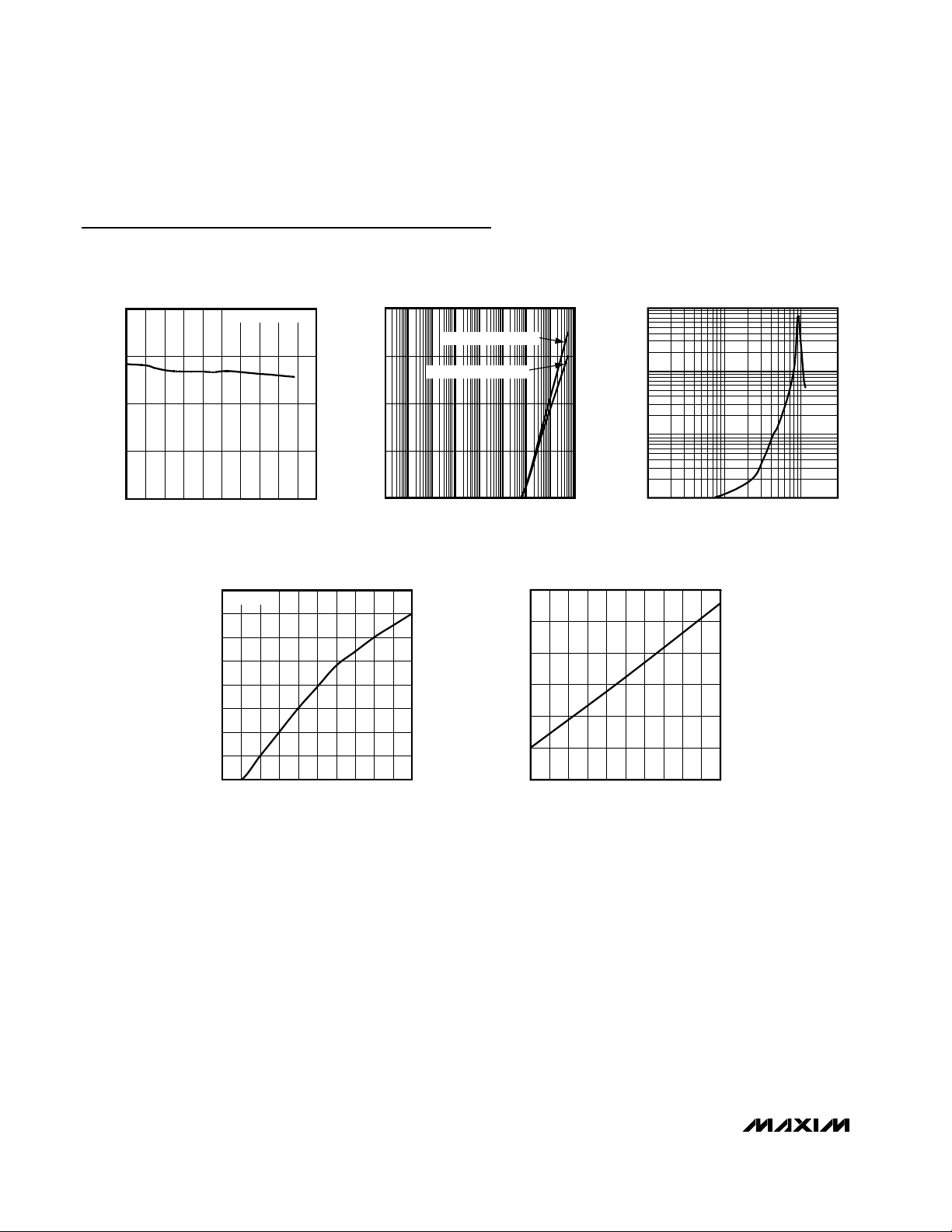
Typical Operating Characteristics
(VCC= +3.3V to +5.5V, TA= +25°C, unless otherwise noted.)
-2
-1
1
0
2
-50 -10 10 30 50-30 70 90 110 130 150
TEMPERATURE ERROR vs.
REMOTE-DIODE TEMPERATURE
MAX6690 toc01
TEMPERATURE (°C)
TEMPERATURE ERROR (°C)
FAIRCHILD 2N3904
1 10k 1M100 100M
TEMPERATURE ERROR vs.
POWER-SUPPLY NOISE FREQUENCY
MAX6690 toc02
FREQUENCY (Hz)
TEMPERATURE ERROR (°C)
0
4
8
12
16
VIN = 500mVp-p LOCAL
VIN = 500mVp-p REMOTE
3
0
1k 10M
TEMPERATURE ERROR vs.
COMMON-MODE NOISE FREQUENCY
1
2
MAX6690 toc03
FREQUENCY (Hz)
TEMPERATURE ERROR (°C)
100k
0
2
1
3
6
7
5
4
8
0 2030405010 60 70 80 90 100
TEMPERATURE ERROR vs.
DXP-DXN CAPACITANCE
MAX6690 toc04
DXP-DXN CAPACITANCE (nF)
TEMPERATURE ERROR (°C)
VCC = +5V
40
70
60
50
80
90
100
3.0 3.83.63.2 3.4 4.0 4.2 4.4 4.6 4.8 5.0
STANDBY SUPPLY CURRENT vs.
SUPPLY VOLTAGE
MAX6690 toc05
SUPPLY VOLTAGE (V)
STANDBY SUPPLY CURRENT (µA)
Page 5
MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
_______________________________________________________________________________________ 5
Pin Description
PIN NAME FUNCTION
1, 5, 9, 13, 16 N.C. No Connection. Not internally connected. May be used for PC board trace routing.
2V
3 DXP
4 DXN
6 ADD1 SMBus Slave Address Select Input. ADD0 and ADD1 are sampled upon power-up.
7, 8 GND Ground
10 ADD0 SMBus Slave Address Select Input. ADD0 and ADD1 are sampled upon power-up.
11 ALERT SMBus Alert (Interrupt) Output. Open drain.
12 SMBDATA SMBus Serial-Data Input/Output. Open drain.
14 SMBCLK SMBus Serial-Clock Input
15 STBY
CC
Supply Voltage Input. +3.0V to +5.5V. Bypass to GND with a 0.1µF capacitor. A 200Ω series
resistor is recommended but not required for additional noise filtering.
Combined Current Source and ADC Positive Input for Remote-Junction Channel. If a remotesensing junction is not used, connect DXP to DXN.
Combined Current Sink and ADC Negative Input. DXN is internally biased to a diode voltage above
ground.
Hardware Standby Input. Temperature and comparison threshold data are retained in standby
mode. Low = standby mode, high = operating mode.
Page 6

MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
6 _______________________________________________________________________________________
Detailed Description
The MAX6690 is a temperature sensor that communicates through an SMBus/I2C-compatible interface with a
µP in thermal-management applications. Essentially an
11-bit serial analog-to-digital converter (ADC) with a
sophisticated front end, the MAX6690 measures the
change in diode voltage at different current levels to calculate temperature. It contains a current source, a multiplexer, an ADC, an SMBus interface, and associated
control logic (Figure 1). Temperature data from the ADC
is loaded into data registers, where it is automatically
compared with data previously stored in four
over/undertemperature alarm registers.
ADC and Multiplexer
The ADC is an averaging type that integrates over a
60ms period (each channel, typically, in the 8-bit “legacy” mode), with excellent noise rejection.
The multiplexer automatically steers bias currents
through the remote and local diodes. The ADC and
associated circuitry measure their forward voltages and
compute their temperatures. Both channels are automatically converted once the conversion process has
started, either in free-running or single-shot mode. If
one of the two channels is not used, the device still performs both measurements, and the user can ignore the
results of the unused channel. If the remote-diode
channel is unused, connect DXP to DXN rather than
leave the pins open.
The DXN input is biased at 1VBEabove ground by an
internal diode to set up the ADC inputs for a differential
measurement. The worst-case DXP-DXN differential
input voltage range is 0.28V to 0.9V.
Excess resistance in series with the remote diode causes about +1/2°C error per ohm when the parasitic resistance cancellation mode is not being used. When the
parasitic resistance cancellation mode is being used,
excess resistance of up to 100Ω does not cause any
discernable error. A 200µV offset voltage forced on
DXP-DXN causes about 1°C error.
A/D Conversion Sequence
A conversion sequence consists of a local temperature
measurement and a remote-temperature measurement.
Each time a conversion begins, whether initiated automatically in the free-running autoconvert mode
(RUN/STOP = 0) or by writing a “One-Shot” command,
both channels are converted, and the results of both
measurements are available after the end of conversion. A BUSY status bit in the status byte shows that the
device is actually performing a new conversion; however, even if the ADC is busy, the results of the previous
conversion are always available.
Remote-Diode Selection
The MAX6690 can directly measure the die temperature of CPUs and other ICs having on-board temperature-sensing diodes as shown in the Typical Operating
Circuit, or it can measure the temperature of a discrete
diode-connected transistor. For best accuracy, the discrete transistor should be a small-signal device with its
collector and base connected together. Accuracy has
been experimentally verified for all of the devices listed
in Table 1.
The transistor must be a small-signal type with a relatively high forward voltage; otherwise, the A/D input
voltage range can be violated. The forward voltage
must be >0.28V at 10µA; check to ensure this is true at
the highest expected temperature. The forward voltage
must be <0.9V at 100µA; check to ensure this is true at
the lowest expected temperature. Large power transistors don’t work at all. Also, ensure that the base resistance is <100Ω. Tight specifications for forward-current
gain (+50 to +150, for example) indicate that the manufacturer has good process controls and that the
devices have consistent VBE characteristics.
For heat-sink mounting, the 500-32BT02-000 thermal
sensor from Fenwal Electronics is a good choice. This
device consists of a diode-connected transistor, an aluminum plate with screw hole, and twisted-pair cable
(Fenwal Inc., Milford, MA, 508-478-6000).
Thermal Mass and Self-Heating
Thermal mass can significantly affect the time required
for a temperature sensor to respond to a sudden
change in temperature. The thermal time constant of
the 16-pin QSOP package is about 140s in still air. For
the junction temperature of a MAX6690 in still air to settle to within +1°C after a sudden +100°C change in air
temperature, about five time constants or 12 minutes
are required. However, the MAX6690 is not intended to
Table 1. Remote-Sensor Transistor
Manufacturers
Note: Transistors must be diode connected (base shorted to
collector).
MANUFACTURER MODEL NO.
Central Semiconductor (USA) CMPT3904
Fairchild Semiconductor (USA) 2N3904, 2N3906
ON Semiconductor (USA) 2N3904, 2N3906
Rohm Semiconductor (USA) SST3904
Samsung (Korea) KST3904-TF
Siemens (Germany) SMBT3904
Zetex (England) FMMT3904CT-ND
Page 7

MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
_______________________________________________________________________________________ 7
Figure 1. Functional Diagram
REMOTE
MUX
LOCAL
REMOTE TEMPERATURE
DATA REGISTER
HIGH-TEMPERATURE THRESHOLD
(REMOTE T
HIGH
)
LOW-TEMPERATURE THRESHOLD
(REMOTE T
LOW
)
DIGITAL COMPARATOR
(REMOTE)
LOCAL TEMPERATURE
DATA REGISTER
HIGH-TEMPERATURE THRESHOLD
(LOCAL T
HIGH)
LOW-TEMPERATURE THRESHOLD
(LOCAL T
LOW
)
DIGITAL COMPARATOR
(LOCAL)
COMMAND BYTE
(INDEX) REGISTER
SMBDATA
SMBCLK
ADDRESS
DECODER
READ WRITE
CONTROL
LOGIC
SMBus
ADD1ADD0STBY
STATUS BYTE REGISTER
CONFIGURATION
BYTE REGISTER
CONVERSION RATE
REGISTER
ALERT RESPONSE
ADDRESS REGISTER
SELECTED VIA
SLAVE ADD = 0001 100
ADC
+
DIODE
FAULT
DXP
DXN
GND
V
CC
-
-
+
-
8
8
8
8
8
8
88
2
7
ALERT
QS
R
MAX6690
Page 8

MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
8 _______________________________________________________________________________________
measure ambient temperature; when measuring local
temperature, it senses the temperature of the PC board
to which it is soldered. The leads provide a good thermal path between the PC board traces and the
MAX6690’s die. Thermal conductivity between the
MAX6690’s die and the ambient air is poor by comparison. Because the thermal mass of the PC board is far
greater than that of the MAX6690, the device follows
temperature changes on the PC board with little or no
perceivable delay.
When measuring temperature with discrete remote sensors, the use of smaller packages, such as SOT23s,
yields the best thermal response times. Take care to
account for thermal gradients between the heat source
and the sensor, and ensure that stray air currents
across the sensor package do not interfere with measurement accuracy. When measuring the temperature
of a CPU or other IC with an on-chip sense junction,
thermal mass has virtually no effect; the measured temperature of the junction tracks the actual temperature
within a conversion cycle.
Self-heating does not significantly affect measurement
accuracy. Remote-sensor self-heating due to the diode
current source is negligible. For the local diode, the
worst-case error occurs when autoconverting at the
fastest rate and simultaneously sinking maximum current at the ALERT output. For example, at an 8Hz rate
and with ALERT sinking 1mA, the typical power dissipation is VCCx 450µA + 0.4V x 1mA. Package theta JA is about 150°C/Ω, so with VCC= 5V and no copper
PC board heat sinking, the resulting temperature rise is:
∆T = 2.7mW x 150°C/W = 0.4°C
Even with these contrived circumstances, it is difficult
to introduce significant self-heating errors.
ADC Noise Filtering
The ADC is an integrating type with inherently good
noise rejection, especially of low-frequency signals such
as 60Hz/120Hz power-supply hum. Micropower operation places constraints on high-frequency noise rejection;
therefore, careful PC board layout and proper external
noise filtering are required for high-accuracy remote
measurements in electrically noisy environments.
High-frequency EMI is best filtered at DXP and DXN with
an external 2200pF capacitor. This value can be
increased to about 3300pF (max), including cable
capacitance. Capacitance >3300pF introduces errors
due to the rise time of the switched current source.
Nearly all noise sources tested cause the ADC measurements to be higher than the actual temperature, typically
by +1°C to +10°C, depending on the frequency and
amplitude (see Typical Operating Characteristics).
PC Board Layout
1) Place the MAX6690 as close as practical to the
remote diode. In a noisy environment, such as a
computer motherboard, this distance can be 4in to
8in (typ) or more, as long as the worst noise
sources (such as CRTs, clock generators, memory
buses, and ISA/PCI buses) are avoided.
2) Do not route the DXP-DXN lines next to the deflec-
tion coils of a CRT. Also, do not route the traces
across a fast memory bus, which can easily introduce +30°C error, even with good filtering.
Otherwise, most noise sources are fairly benign.
3) Route the DXP and DXN traces in parallel and in
close proximity to each other, away from any highvoltage traces, such as +12VDC. Leakage currents
from PC board contamination must be dealt with
carefully since a 20MΩ leakage path from DXP to
ground causes about +1°C error.
4) Connect guard traces to GND on either side of the
DXP-DXN traces (Figure 2). With guard traces in
place, routing near high-voltage traces is no longer
an issue.
5) Route through as few vias and crossunders as pos-
sible to minimize copper/solder thermocouple
effects.
6) When introducing a thermocouple, make sure that
both the DXP and the DXN paths have matching
thermocouples. In general, PC-board-induced thermocouples are not a serious problem. A coppersolder thermocouple exhibits 3µV/°C, and it takes
about 200µV of voltage error at DXP-DXN to cause
a +1°C measurement error. So, most parasitic thermocouple errors are swamped out.
7) Use wide traces. Narrow traces are more inductive
and tend to pick up radiated noise. The 10mil
widths and spacings recommended in Figure 2
aren’t absolutely necessary (as they offer only a
MINIMUM
10mils
10mils
10mils
10mils
GND
DXN
DXP
GND
Figure 2. Recommended DXP/DXN PC Traces
Page 9

MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
_______________________________________________________________________________________ 9
minor improvement in leakage and noise), but try to
use them where practical.
8) Keep in mind that copper can’t be used as an EMI
shield, and only ferrous materials such as steel
work well. Placing a copper ground plane between
the DXP-DXN traces and traces carrying high-frequency noise signals does not help reduce EMI.
PC Board Layout Checklist
• Place the MAX6690 close to the remote-sense junction.
• Keep traces away from high voltages (+12V bus).
• Keep traces away from fast data buses and CRTs.
• Use recommended trace widths and spacings.
• Place a ground plane under the traces.
• Use guard traces flanking DXP and DXN and connecting to GND.
• Place the noise filter and the 0.1µF VCCbypass
capacitors close to the MAX6690.
• Add a 200Ω resistor in series with VCCfor best
noise filtering (see Typical Operating Circuit).
Twisted-Pair and Shielded Cables
For remote-sensor distances longer than 8in, or in particularly noisy environments, a twisted pair is recommended. Its practical length is 6ft to 12ft (typ) before noise
becomes a problem, as tested in a noisy electronics laboratory. For longer distances, the best solution is a
shielded twisted pair like that used for audio microphones. For example, Belden #8451 works well for distances up to 100ft in a noisy environment. Connect the
twisted pair to DXP and DXN and the shield to GND, and
leave the shield’s remote end unterminated.
Excess capacitance at DXN and DXP limits practical
remote-sensor distances (see Typical Operating
Characteristics). For very long cable runs, the cable’s
parasitic capacitance often provides noise filtering, so
the 2200pF capacitor can often be removed or reduced
in value.
Cable resistance also affects remote-sensor accuracy;
1Ω series resistance introduces about +1/2°C error.
Setting bit 4 of the configuration register to 1 invokes
the parasitic resistance cancellation mode. This rejects
external resistance in excess of 100Ω while maintaining
conversion accuracy.
Low-Power Standby Mode
Standby mode disables the ADC and reduces the supply-current drain to less than 10µA. Enter standby
mode by forcing the STBY/pin low or through the
RUN/STOP bit in the configuration byte register.
Hardware and software standby modes behave almost
identically; all data is retained in memory, and the SMB
interface is alive and listening for reads and writes. The
only difference is that in hardware standby mode, the
one-shot command does not initiate a conversion.
Standby mode is not a shutdown mode. With activity on
the SMBus, extra supply current is drawn (see Typical
Operating Characteristics). In software standby mode,
the MAX6690 can be forced to perform A/D conversions through the one-shot command, despite the
RUN/STOP bit being high.
Activate hardware standby mode by forcing the STBY
pin low. In a notebook computer, this line may be connected to the system SUSTAT# suspend-state signal.
The STBY pin low state overrides any software conversion command. If a hardware or software standby command is received while a conversion is in progress, the
conversion cycle is truncated, and the data from that
conversion is not latched into either temperature reading register. The previous data is not changed and
remains available.
Supply-current drain during the 125ms conversion period is always about 550µA. Slowing down the conversion rate reduces the average supply current (see
Typical Operating Characteristics). In between conversions, the supply current is about 25µA due to the current consumed by the conversion rate timer. In standby
mode, supply current drops to about 3µA. At very low
supply voltages (under the power-on-reset threshold),
the supply current is higher due to the address pin bias
currents. It can be as high as 100µA, depending on
ADD0 and ADD1 settings.
SMBus Digital Interface
From a software perspective, the MAX6690 appears as
a set of byte-wide registers that contain temperature
data, alarm threshold values, or control bits. A standard
SMBus 2-wire serial interface is used to read temperature data and write control bits and alarm threshold
data. The device responds to the same SMBus slave
address for access to all functions.
The MAX6690 employs four standard SMBus protocols:
Write Byte, Read Byte, Send Byte, and Receive Byte
(Figures 3, 4, 5). The shorter Receive Byte protocol
allows quicker transfers, provided that the correct data
register was previously selected by a Read Byte instruction. Use caution with the shorter protocols in multimaster systems, since a second master could overwrite the
command byte without informing the first master.
Page 10

MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
10 ______________________________________________________________________________________
Figure 4. SMBus Write Timing Diagram
Figure 5. SMBus Read Timing Diagram
ACK
7 bits
ADDRESS ACKWR
8 bits
DATA ACK
1
P
8 bits
S COMMAND
Write Byte Format
Read Byte Format
Send Byte Format Receive Byte Format
Slave Address: equivalent to chip-select line of
a 3-wire interface
Command Byte: selects which
register you are writing to
Data Byte: data goes into the register
set by the command byte (to set
thresholds, configuration masks, and
sampling rate)
ACK
7 bits
ADDRESS ACKWR S ACK
8 bits
DATA
7 bits
ADDRESS RD
8 bits
/// PS COMMAND
Slave Address: equivalent to chip-select line
Command Byte: selects
which register you are
reading from
Slave Address: repeated
due to change in dataflow direction
Data Byte: reads from
the register set by the
command byte
ACK
7 bits
ADDRESS WR
8 bits
COMMAND ACK PS ACK
7 bits
ADDRESS RD
8 bits
DATA /// PS
Command Byte: sends command with no data, usually
used for one-shot command
Data Byte: reads data from
the register commanded
by the last Read Byte or
Write Byte transmission;
also used for SMBus Alert
Response return address
S = Start condition Shaded = Slave transmission
P = Stop condition /// = Not acknowledged
Figure 3. SMBus Protocols
SMBCLK
SMBDATA
A = START CONDITION
B = MSB OF ADDRESS CLOCKED INTO SLAVE
C = LSB OF ADDRESS CLOCKED INTO SLAVE
D = R/W BIT CLOCKED INTO SLAVE
E = SLAVE PULLS SMBDATA LINE LOW
SMBCLK
SMBDATA
AB CDEFG H
t
SU:STAtHD:STA
A = START CONDITION
B = MSB OF ADDRESS CLOCKED INTO SLAVE
C = LSB OF ADDRESS CLOCKED INTO SLAVE
D = R/W BIT CLOCKED INTO SLAVE
AB CDEFG HIJ
t
LOWtHIGH
t
t
HD:STA
SU:STA
t
t
HIGH
LOW
t
SU:DAT
t
SU:DAT
F = ACKNOWLEDGE BIT CLOCKED INTO MASTER
G = MSB OF DATA CLOCKED INTO SLAVE
H = LSB OF DATA CLOCKED INTO SLAVE
I = SLAVE PULLS SMBDATA LINE LOW
E = SLAVE PULLS SMBDATA LINE LOW
F = ACKNOWLEDGE BIT CLOCKED INTO MASTER
G = MSB OF DATA CLOCKED INTO MASTER
H = LSB OF DATA CLOCKED INTO MASTER
t
HD:DAT
K
J = ACKNOWLEDGE CLOCKED INTO MASTER
K = ACKNOWLEDGE CLOCK PULSE
L = STOP CONDITION, DATA EXECUTED BY SLAVE
M = NEW START CONDITION
J
KLM
I
I = MASTER PULLS DATA LINE LOW
J = ACKNOWLEDGE CLOCKED INTO SLAVE
K = ACKNOWLEDGE CLEAR PULSE
M
L
t
t
SU:STO
BUF
t
t
SU:STO
BUF
J = STOP CONDITION, DATA
EXECUTED BY SLAVE
K = NEW START CONDITION
Page 11

MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
______________________________________________________________________________________ 11
When the conversion rate is greater than 1Hz, temperature data can be read from the read internal temperature (00h) and read external temperature (01h)
registers. The temperature data format is 7 bits plus
sign in two’s-complement form for each channel, with
the LSB representing 1°C (Table 2), transmitted MSB
first. When the conversion rate is less than 1Hz, the
extended data can be read from the read external
extended temperature register (10h) and the read internal extended temperature register (11h), and the first 3
bits of the register represent 1/2, 1/4, and 1/8 of a
degree. Measurements are offset by +1/2°C to minimize quantization errors; for example, +99.6°C is
reported as +100°C.
When the conversion rate is 1Hz or less, the first 8 bits
of temperature data can be read from the read internal
temperature (00h) and read external temperature (01h)
registers, the same as for faster conversion rates. An
additional 3 bits can be read from the read external
extended temperature and read internal extended temperature registers, which extend the resolution to
0.125°C per LSB (Table 3).
If a conversion ends after reading the main register but
before reading the extended register, the extended
register contains the 3LSBs from the new conversion
while the main register contains the 8MSBs from the
previous conversion. The extended data in this case is
meaningless. To avoid this problem, read extended
resolution temperature data using one of the following
approaches:
1) Put the MAX6690 into standby mode by setting bit 6
of the configuration register to 1. Initiate a one-shot
conversion using Command Byte 0Fh. When this
conversion is complete, read the contents of the
temperature data registers.
2) If the MAX6690 is in run mode and the conversion
rate is not set to either 1Hz or 8Hz, read the Status
Byte. If the BUSY bit indicates that a conversion is
in progress, wait until the conversion is complete as
indicated by the BUSY bit. Then immediately read
the contents of the temperature data registers. If no
conversion is in progress, the data can be read
within a few µs, which is a sufficiently short period
to ensure that a new conversion can’t be completed
until after the data has been read.
Note: Extended resolution applies only for conversion speeds of 1Hz and below.
Alarm Threshold Registers
Four registers store alarm threshold data, with hightemperature (T
HIGH
) and low-temperature (T
LOW
) registers for each A/D channel. If either measured
temperature equals or exceeds the corresponding
alarm threshold value, an ALERT interrupt is asserted.
The POR state of both T
HIGH
registers is full scale
(0111 1111, or +127°C). The POR state of both T
LOW
registers is 1100 1001 or -55°C.
Diode Fault Alarm
There is a continuity fault detector at DXP that detects
whether the remote diode has an open-circuit condition
or if DXP is shorted to DXN, GND, or VCC. If an open
circuit exists, then the temperature register is loaded
with 1000 0000, and bit 3 of the status register is set to
1 at the end of a conversion. This means that immediately after POR, the status byte indicates no fault is present until the end of the first conversion.
Table 2. Data Format
Table 3. Extended Resolution Register
TEMP (°C) ROUNDED TEMP (°C)
130.00 +127 0 111 1111
127.00 +127 0 111 1111
126.00 +127 0 111 1111
25.25 +25 0 001 1001
0.50 +1 0 000 0001
0.00 0 0 000 0000
<0.00 (Note 1) (Normal mode) 1 000 0000
-1 (Extended temp mode) 1 111 1111
<-64 (Extended temp mode) 1 000 0000
Diode fault
(short or open)
FRACTIONAL
TEMPERATURE
0.000 000X XXXX
0.125 001X XXXX
0.250 010X XXXX
0.375 011X XXXX
0.500 100X XXXX
0.625 101X XXXX
0.750 110X XXXX
0.875 111X XXXX
DIGITAL OUTPUT
DIGITAL
OUTPUT
1 000 0000
Page 12

MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
12 ______________________________________________________________________________________
Alert
Interrupts
The ALERT interrupt output signal is latched and can
only be cleared by either reading the status register or
by receiving an Alert Response address, if the fault
condition has ceased. Interrupts are generated in
response to T
HIGH
and T
LOW
comparisons and when
the remote diode is disconnected (for continuity fault
detection). The interrupt does not halt automatic conversions; new temperature data continues to be available over the SMBus interface after ALERT is asserted.
The interrupt output pin is open drain so that multiple
devices can share a common interrupt line. The interrupt rate can never exceed the conversion rate.
The MAX6690 responds to the SMBus Alert Response
address, an interrupt pointer return-address feature
(see Alert Response Address section). Prior to taking
corrective action, always check to ensure that an interrupt is valid by reading the current temperature.
Alert Response Address
The SMBus Alert Response interrupt pointer provides
quick fault identification for simple slave devices that
lack the complex, expensive logic needed to be a bus
master. Upon receiving an ALERT interrupt signal, the
host master can broadcast a Receive Byte transmission
to the Alert Response slave address (0001 100). Then
any slave device that generated an interrupt attempts
to identify itself by putting its own address on the bus
(Table 4).
The Alert Response can activate several different slave
devices simultaneously, similar to the I2C General Call.
If more than one slave attempts to respond, bus arbitration rules apply, and the device with the lower address
code wins. The losing device does not generate an
acknowledge and continues to hold the ALERT line low
until cleared. (The conditions for clearing an ALERT
vary depending on the type of slave device. Successful
reading of the alert response address clears the interrupt latch provided that the condition that caused the
ALERT has already ceased. The ALERT is cleared after
the slave address has been returned to the host.)
Command Byte Functions
The 8-bit command byte register (Table 5) is the master
index that points to the various other registers within the
MAX6690. The register’s POR state is 0000 0000, so
that a Receive Byte transmission (a protocol that lacks
the command byte) that occurs immediately after POR
returns the current local temperature data. The oneshot command immediately forces a new conversion
cycle to begin. If the one-shot command is received
when the MAX6690 is in software standby mode
(RUN/STOP bit = high), a new conversion is begun,
after which the device returns to standby mode. If a
conversion is in progress when a one-shot command is
received, the command is ignored. If a one-shot command is received in autoconvert mode (RUN/STOP bit
= low) between conversions, a new conversion begins,
the conversion rate timer is reset, and the next automatic conversion takes place after a full delay elapses.
Configuration Byte Functions
The configuration byte register (Table 6) is a read-write
register with several functions. Bit 7 is used to mask
(disable) interrupts. Bit 6 puts the MAX6690 into software standby mode (STOP) or autoconvert (RUN) mode.
Bit 5 selects the extended temperature range mode,
which allows temperature data to be read down to
-65°C. Bit 4 puts the MAX6690 into parasitic resistance
cancellation mode (PRCM), which can reduce temperature measurement errors due to resistance in series with
the sensing junction. Bit 3 should always be set to zero
(default value). Bits 2, 1, and 0 are internally set to zero.
Parasitic Resistance Cancellation
Mode
Resistance in series with the remote-sensing junction
causes conversion errors on the order of 0.5°C per
ohm. The MAX6690 can cancel the effect of parasitic
series resistance by using the PRCM. If bit 4 of the configuration byte is set HIGH, then the PRCM is invoked,
provided the conversion rate is set ≤ 1Hz. If the conversion rate is faster than this, then the setting of bit 4 in
the configuration register is ignored. In the PRCM, the
conversion time is doubled (to typically 500ms to read
both local and remote diodes) but external resistances
as high as 100Ω can be compensated.
Table 4. Read Format for Alert Response
Address (0001100)
NAMEBIT
Logic 1
0
(LSB)
1
7
(MSB)
ADD7
1 ADD1
2 ADD2
3 ADD3
4 ADD4
5 ADD5
FUNCTION
Provide the current MAX6690
slave address that was latched at
POR (Table 9)
6 ADD6
Page 13

MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
______________________________________________________________________________________ 13
Status Byte Functions
The status byte register (Table 7) indicates which (if
any) temperature thresholds have been exceeded. This
byte also indicates whether the ADC is converting and
whether there is an open circuit in the remote-diode
DXP–DXN path. After POR, the normal state of all the
flag bits is zero, assuming none of the alarm conditions
are present. The status byte is cleared by any successful read of the status byte, unless the fault persists.
Note that the ALERT interrupt latch is not automatically
cleared when the status flag bit indicating the ALERT is
cleared. The fault condition must be eliminated before
the ALERT can be cleared.
When reading the status byte, check for internal bus
collisions caused by asynchronous ADC timing, or else
disable the ADC prior to reading the status byte
(through the RUN/STOP bit in the configuration byte). In
one-shot mode, read the status byte only after the conversion is complete, which is 150ms max after the oneshot conversion is commanded.
Table 6. Configuration-Byte Bit Assignments
Table 5. Command-Byte Bit Assignments
REGISTER ADDRESS POR STATE FUNCTION
RLTS 00h 0000 0000 Read Internal Temperature
RRTE 01h 0000 0000 Read External Temperature
RSL 02h 0000 0000 Read Status Byte
RCL 03h 0000 0000 Read Configuration Byte
RCRA 04h 0000 0010 Read Conversion Rate Byte
RLHN 05h 0111 1111 Read Internal High Limit
RLLI 06h 1100 1001 Read Internal Low Limit
RRHI 07h 0111 1111 Read External High Limit
RRLS 08h 1100 1001 Read External Low Limit
WCA 09h N/A Write Configuration Byte
WCRW 0Ah N/A Write Conversion Rate Byte
WLHO 0Bh N/A Write Internal High Limit
WLLM 0Ch N/A Write Internal Low Limit
WRHA 0Dh N/A Write External High Limit
WRLN 0Eh N/A Write External Low Limit
OSHT 0Fh N/A One-Shot
RRET 10h 0000 0000 Read External Extended Temperature
RLET 11h 0000 0000 Read Internal Extended Temperature
N/A FEh 4D Read Device ID
N/A FFh 08 Read Device Revision
BIT NAME POR STATE FUNCTION
7 (MSB) MASK1 0 Masks ALERT interrupts if high.
6 RUN/STOP 0 Standby mode control bit; if high, standby mode is initiated.
5 ETA 0 If high, lower temperature range is extended from 0°C to -64°C.
4 PRCM 0 If high, parasitic resistance cancellation mode is enabled.
3 SPNP 0 —
2 to 0 RFU 0 Reserved.
Page 14

MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
14 ______________________________________________________________________________________
The MAX6690 incorporates collision avoidance so that
completely asynchronous operation is allowed between
SMBus operations and temperature conversions.
When autoconverting, if the T
HIGH
and T
LOW
limits are
close together, it’s possible for both high-temp and lowtemp status bits to be set, depending on the amount of
time between status read operations (especially when
converting at the fastest rate). In these circumstances,
it is best not to rely on the status bits to indicate reversals in long-term temperature changes. Instead, use a
current temperature reading to establish the trend
direction.
Conversion Rate Byte
The conversion rate register (Table 8) programs the
time interval between conversions in free-running autoconvert mode. This variable rate control can be used to
reduce the supply current in portable-equipment applications. The conversion rate byte’s POR state is 02h
(0.25Hz). The MAX6690 looks only at the 3LSB bits of
this register, so the upper 5 bits are “don’t care” bits,
which should be set to zero. The conversion rate tolerance is ±25% at any rate setting.
Valid A/D conversion results for both channels are
available one total conversion time (125ms nominal,
156ms maximum) after initiating a conversion, whether
conversion is initiated through the RUN/STOP bit, hardware STBY/pin, one-shot command, or initial power-up.
Extended resolution and the parasitic resistance cancellation mode are available at conversion rates of 1Hz
or lower.
Slave Addresses
The MAX6690’s device address can be set to one of
nine different values by pin strapping ADD0 and ADD1
so that more than one MAX6690 can reside on the
same bus without address conflicts (Table 9).
The address pin states are checked at POR only, and
the address data stays latched to reduce quiescent
supply current due to the bias current needed for highZ state detection.
The MAX6690 also responds to the SMBus Alert
Response slave address (see the Alert Response
Address section).
POR and UVLO
The MAX6690 has a volatile memory. To prevent
ambiguous power-supply conditions from corrupting
the data in memory and causing erratic behavior, a
POR voltage detector monitors VCCand clears the
memory if V
CC
falls below 2V (typ, see Electrical
Characteristics). When power is first applied and V
CC
rises above 2.0V (typ), the logic blocks begin operating, although reads and writes at V
CC
levels below 3V
are not recommended. A second V
CC
comparator, the
ADC undervoltage lockout (UVLO) comparator, prevents the ADC from converting until there is sufficient
headroom (V
CC
= 2.8V typ).
Table 7. Status Byte Bit Assignments
BIT NAME
7 (MSB) BUSY 0 ADC is busy converting when high.
6 LHIGH 0
5 LLOW 0
4 RHIGH 0
3 RLOW 0
2 OPEN 0
1 or 0 RFU 0 Reserved.
POR
STATE
Internal high-temperature alarm has tripped when high; cleared by POR or readout
of the entire status byte if the fault condition no longer exists.
Internal low-temperature alarm has tripped when high; cleared by POR or readout of
the entire status byte if the fault condition no longer exists.
External high-temperature alarm has tripped when high; cleared by POR or readout
of the entire status byte if the fault condition no longer exists.
External low-temperature alarm has tripped when high; cleared by POR or readout
of the entire status byte if the fault condition no longer exists.
A high indicates an external diode is open; cleared by POR or readout of the entire
status byte if the fault condition no longer exists.
FUNCTION
Page 15

Power-Up Defaults:
• Interrupt latch is cleared.
• Address select pins are sampled.
• ADC begins autoconverting at a 0.25Hz rate.
• Command byte is set to 00h to facilitate quick
remote Receive Byte queries.
•T
HIGH
and T
LOW
registers are set to max and min
limits, respectively.
MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
______________________________________________________________________________________ 15
Table 8. Conversion-Rate Control Byte
Table 9. Slave Address Decoding (ADD0
and ADD1)
Note: High-Z means that the pin is left unconnected and floating.
Chip Information
TRANSISTOR COUNT: 12,504
PROCESS: BiCMOS
DATA CONVERSION RATE (Hz)
00h 0.0625
01h 0.125
02h 0.25
03h 0.5
04h 1
05h 2
06h 4
07h 8
08h-FFh Reserved
ADD0 ADD1 ADDRESS
0 0 0011 000
0 High-Z 0011 001
0 1 0011 010
High-Z 0 0101 001
High-Z High-Z 0101 010
High-Z 1 0101 011
1 0 1001 100
1 High-Z 1001 101
1 1 1001 110
Page 16

MAX6690
2°C Accurate Remote/Local Temperature
Sensor with SMBus Serial Interface
Maxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit patent licenses are
implied. Maxim reserves the right to change the circuitry and specifications without notice at any time.
16 ____________________Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 408-737-7600
© 2001 Maxim Integrated Products Printed USA is a registered trademark of Maxim Integrated Products.
Package Information
QSOP.EPS
 Loading...
Loading...