

Page 1

19-5040; Rev 0; 10/09
6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
General Description
The MAX16068 flash-configurable system manager
monitors and manages up to six system voltages
simultaneously. The MAX16068 integrates an analogto-digital converter (ADC). Device configuration information, including overvoltage and undervoltage limits,
time delay settings is stored in nonvolatile flash memory.
During a fault condition, fault flags and channel voltages can be automatically stored in the nonvolatile flash
memory for later readback.
The internal 1% accurate, 10-bit ADC measures each
input and compares the result to one overvoltage and
one undervoltage limit. A fault signal asserts when a
monitored voltage falls outside the set limits.
The MAX16068 supports a power-supply voltage of up to
14V and can be powered directly from the 12V intermediate bus in many systems.
The MAX16068 includes six programmable generalpurpose inputs/outputs (GPIOs). GPIOs are flash configurable as a fault output, as a watchdog input or output,
or as a manual reset.
The MAX16068 features nonvolatile fault memory for
recording information during system shutdown events.
The fault logger records a failure in the internal flash
and sets a lock bit protecting the stored fault data from
accidental erasure.
An SMBus™ or a JTAG serial interface configures the
MAX16068. The MAX16068 is available in a 28-pin, 5mm
x 5mm, TQFN package and is fully specified over the
-40NC to +85NC extended temperature range.
Features
S Operates from 2.8V to 14V
S 1% Accurate, 10-Bit ADC Monitors 6 Voltage
Inputs
S Analog EN Monitoring Input
S 6 Monitored Inputs with Overvoltage and
Undervoltage Limits
S Nonvolatile Fault Event Logger
S Six General-Purpose Inputs/Outputs Configurable
as:
Dedicated Fault Output
Watchdog Timer Function
Manual Reset
SMBus Alert
Fault Propagation Input/Output
S SMBus and JTAG Interface
S Supports Cascading with MAX16065/MAX16066
S Flash-Configurable Time Delays and Thresholds
S -40NC to +85NC Extended Operating Temperature
Range
Applications
Networking Equipment
Telecom Equipment (Base Stations, Access)
Storage/Raid Systems
Servers
Typical Operating Circuit appears at end of data sheet.
MAX16068
Ordering Information/Selector Guide
PART PIN-PACKAGE VOLTAGE-DETECTOR INPUTS
MAX16068ETI+ 28 TQFN-EP* 6 6
Note: This device is specified over the -40NC to +85NC extended temperature range.
+Denotes a lead(Pb)-free/RoHS-compliant package.
*EP = Exposed pad.
SMBus is a trademark of Intel Corp.
_______________________________________________________________ Maxim Integrated Products 1
For pricing, delivery, and ordering information, please contact Maxim Direct at 1-888-629-4642,
or visit Maxim’s website at www.maxim-ic.com.
GENERAL-PURPOSE INPUTS/
OUTPUTS
Page 2
6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
ABSOLUTE MAXIMUM RATINGS
V
to GND ...............……………………………….-0.3V to +15V
CC
MON_, SCL, SDA, A0 to GND ................................-0.3V to +6V
EN, TCK, TMS, TDI to GND ....................................-0.3V to +4V
TDO to GND ............................................-0.3V to (V
RESET, GPIO_
(configured as open-drain) to GND. ....................-0.3V to +6V
RESET, GPIO_ (configured as push-pull)
to GND .................................................-0.3V to (V
DBP, ABP to GND .......................................-0.3V to minimum of
MAX16068
(4V and (VCC + 0.3V))
*As per JEDEC 51 Standard, Multilayer Board (PCB).
Note 1: Package thermal resistances were obtained using the method described in JEDEC specification JESD51-7, using a four-
layer board. For detailed information on package thermal considerations, refer to www.maxim-ic.com/thermal-tutorial.
Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional
operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect device reliability.
DBP
DBP
+ 0.3V)
+ 0.3V)
ELECTRICAL CHARACTERISTICS
(VCC = 2.8V to 14V, TA = TJ = -40NC to +85NC, unless otherwise specified. Typical values are at V
TA = +25NC.) (Note 2)
Continuous Current (all pins) .......................................... Q20mA
Continuous Power Dissipation (TA = +70NC)
28-Pin TQFN (derate 34.5mW/NC above +70NC) ..... 2759mW*
Thermal Resistance (Note 1)
BJA ................................................................................29NC/W
BJC ........................…………………………….………… 2NC/W
Operating Temperature Range .......................... -40NC to +85NC
Junction Temperature .....................................................+150NC
Storage Temperature Range ............................ -65NC to +150NC
Lead Temperature (soldering, 10s) ................................+300NC
ABP
= V
= VCC = 3.3V,
DBP
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
Operating Voltage Range V
Undervoltage Lockout V
Undervoltage Lockout Hysteresis UVLO
Minimum Flash Operating Voltage V
Supply Current
DBP Regulator Voltage V
ABP Regulator Voltage V
Boot Time t
Flash Writing Time 8-byte word 122 ms
Internal Timing Accuracy (Note 4) -10 +10 %
ADC
Resolution 10 Bits
Gain Error ADC
Offset Error ADC
CC
UVLO
FLASH
I
CC1
CC2
DBP
ABP
BOOT
RESET output asserted low 1.2
2.8 14
Minimum voltage on VCC to ensure the
device is flash configurable
HYS
Minimum voltage on VCC to ensure flash
erase and write operations
No load on any output 2.8 4
No load on any output, during flash writing
cycle
VCC = V
VCC = 5V, C
VCC = 5V, C
V
CC
TA = +25NC
GAIN
TA = -40NC to +85NC
OFF
> V
ABP
UVLO
= V
DBP
= 1FF, no load
DBP
= 1FF, no load
ABP
= 3.6V (Note 3) 5
2.7 V
2.8 3 3.2 V
2.85 3 3.15 V
2.7 V
55 mV
7.7 14
100 200
0.35
0.75
1.5 LSB
V
mAI
Fs
%
2 ______________________________________________________________________________________
Page 3
6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
ELECTRICAL CHARACTERISTICS (continued)
(VCC = 2.8V to 14V, TA = TJ = -40NC to +85NC, unless otherwise specified. Typical values are at V
TA = +25NC.) (Note 2)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
Integral Nonlinearity ADC
Differential Nonlinearity ADC
ADC Total Monitoring Cycle Time t
ADC MON_ Ranges ADC
ADC LSB Step Size ADC
ADC Input Leakage Current 1
ENABLE INPUT (EN)
EN Input-Voltage Threshold
EN Input Current I
EN Input-Voltage Range 0 3.6 V
OUTPUTS (RESET, GPIO_)
Output-Voltage Low V
Maximum Output Sink Current
CYCLE
V
TH_EN_R
V
TH_EN_F
EN
OL
INL
DNL
Monitoring all 6 inputs, no MON_ fault
detected
MON_ range set to ‘00’ 5.552
RNG
MON_ range set to ‘10’ 1.388
MON_ range set to ‘00’ 5.42
LSB
MON_ range set to ‘10’ 1.35
EN voltage rising 1.24
EN voltage falling 1.195 1.215 1.235
-0.5 +0.5
I
= 2mA 0.4
SINK
= 10mA, GPIO_ only 0.7
SINK
VCC = 1.2V, I
Total current into RESET, GPIO_,
VCC = 3.3V
= 100FA (RESET only)
SINK
= V
ABP
24 30
18 mA
= VCC = 3.3V,
DBP
1 LSB
1 LSB
0.3
Fs
VMON_ range set to ‘01’ 2.776
mVMON_ range set to ‘01’ 2.71
FA
V
FA
VI
MAX16068
Output-Voltage High (Push-Pull) V
Output Leakage Current
(Open-Drain)
INPUTS (A0, GPIO_)
Input Logic-Low V
Input Logic-High V
WDI Pulse Width t
MR Pulse Width
SMBus INTERFACE
Logic-Input Low Voltage V
Logic-Input High Voltage V
Input Leakage Current VCC shorted to GND, V
Output Sink Current V
Input Capacitance C
_______________________________________________________________________________________ 3
OH
I
OUT_LKG
WDI
t
MR
OL
I
SOURCE
IL
IH
Input voltage falling 0.8 V
IL
Input voltage rising 2.0 V
IH
I
SINK
IN
=100FA
= 3mA 0.4 V
2.4 V
20 V
100 ns
2
= 0 or 6V -1 +1
MON_
1
0.8 V
5 pF
FA
Fs
FA
Page 4
6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
ELECTRICAL CHARACTERISTICS (continued)
(VCC = 2.8V to 14V, TA = TJ = -40NC to +85NC, unless otherwise specified. Typical values are at V
TA = +25NC.) (Note 2)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
SMBus TIMING
Serial Clock Frequency f
Bus Free Time Between STOP
and START Condition
MAX16068
START Condition Setup Time t
START Condition Hold Time t
STOP Condition Setup Time t
Clock Low Period t
Clock High Period t
Data Setup Time t
Output Fall Time t
Data Hold Time t
Pulse Width of Spike Suppressed t
SMBus Timeout t
JTAG INTERFACE
TDI, TMS, TCK Logic-Low Input
Voltage
TDI, TMS, TCK Logic-High Input
Voltage
TDO Logic-Output Low Voltage V
TDO Logic-Output High Voltage V
TDI, TMS Pullup Resistors R
I/O Capacitance C
TCK Clock Period t
TCK High/Low Time t
TCK to TMS, TDI Setup Time t
TCK to TMS, TDI Hold Time t
TCK to TDO Delay t
TCK to TDO High-Z Delay t
Note 2: Specifications are guaranteed for the stated global conditions, unless otherwise noted. 100% production tested at TA =
+25NC and TA = +85NC. Specifications at TA = -40NC are guaranteed by design.
Note 3: For VCC of 3.6V or lower, connect VCC, DBP, and ABP together. For higher supply applications, connect only VCC to the
supply rail.
Note 4: Applies to RESET (except for a reset timeout period of 25Fs), fault, autoretry, sequence delays, and watchdog timeout.
SCL
t
BUF
SU:STA
HD:STA
SU:STO
LOW
HIGH
SU:DAT
OF
HD:DAT
SP
TIMEOUT
V
V
OL_TDOISINK
OH_TDO
JPU
2, t3
10pF P C
From 50% SCL falling to SDA
change
SMBCLK time low for reset 22 35 ms
Input voltage falling 0.8 V
IL
Input voltage rising 2.0 V
IH
I
SOURCE
Pullup to DBP 30 50 65
I/O
1
4
5
6
7
1.3
0.6
0.6
0.6
1.3
0.6
100 ns
P 400pF
BUS
Receive 0.15
Transmit 0.3 0.9
= 3mA 0.4 V
= 200FA
2.4 V
50 500 ns
15 ns
15 ns
= V
ABP
250 ns
5 pF
= VCC = 3.3V,
DBP
400 kHz
250 ns
1000 ns
500 ns
500 ns
Fs
Fs
Fs
Fs
Fs
Fs
Fs
kI
4 ______________________________________________________________________________________
Page 5
6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
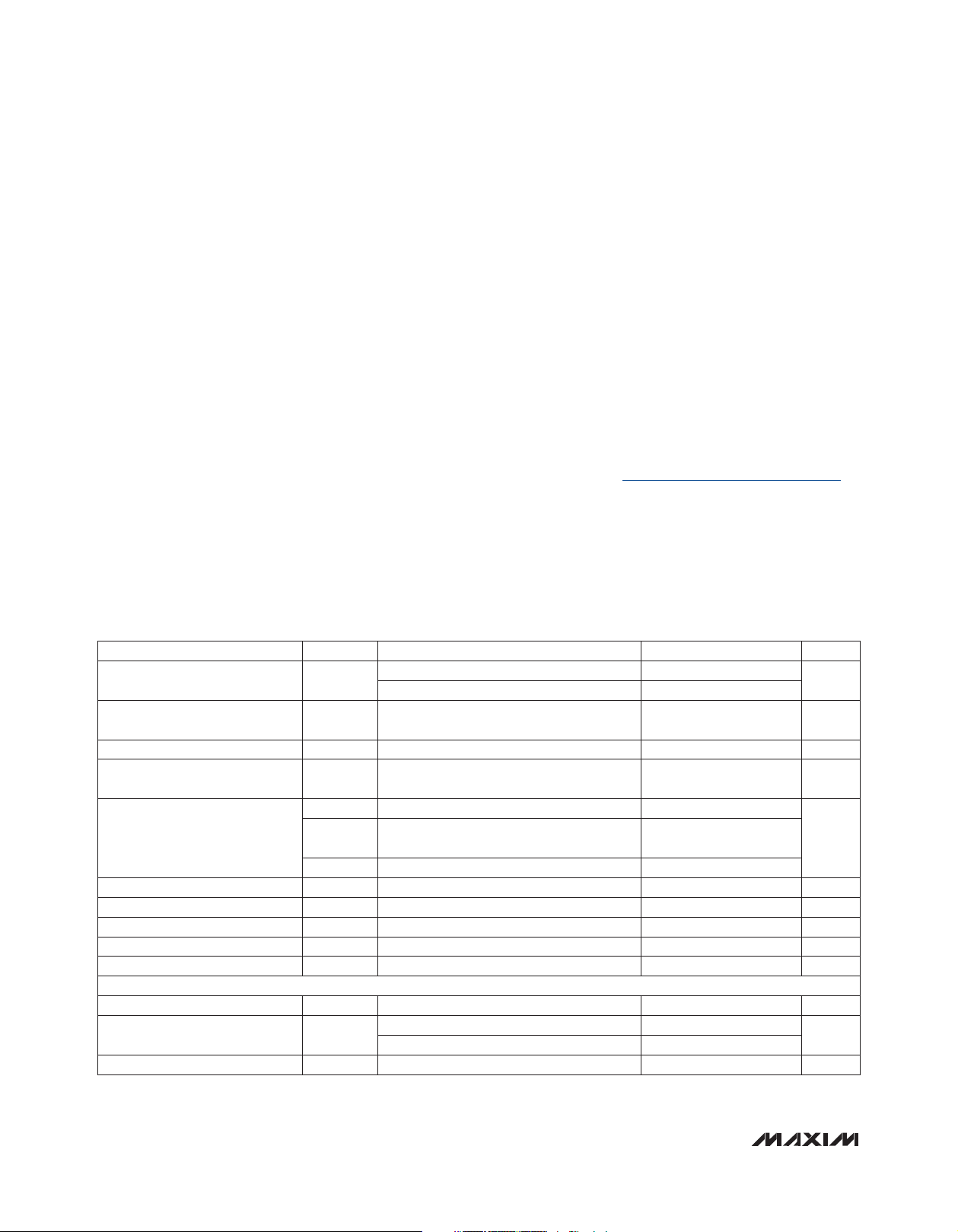
SDA
t
STOP
BUF
START
CONDITION
t
SU:DAT
t
LOW
SCL
t
HIGH
t
HD:STA
t
R
START
CONDITION
Figure 1. SMBus Timing Diagram
t
t
HD:DAT
t
F
SU:STA
REPEATED START
CONDITION
t
HD:STA
t
SU:STO
CONDITION
MAX16068
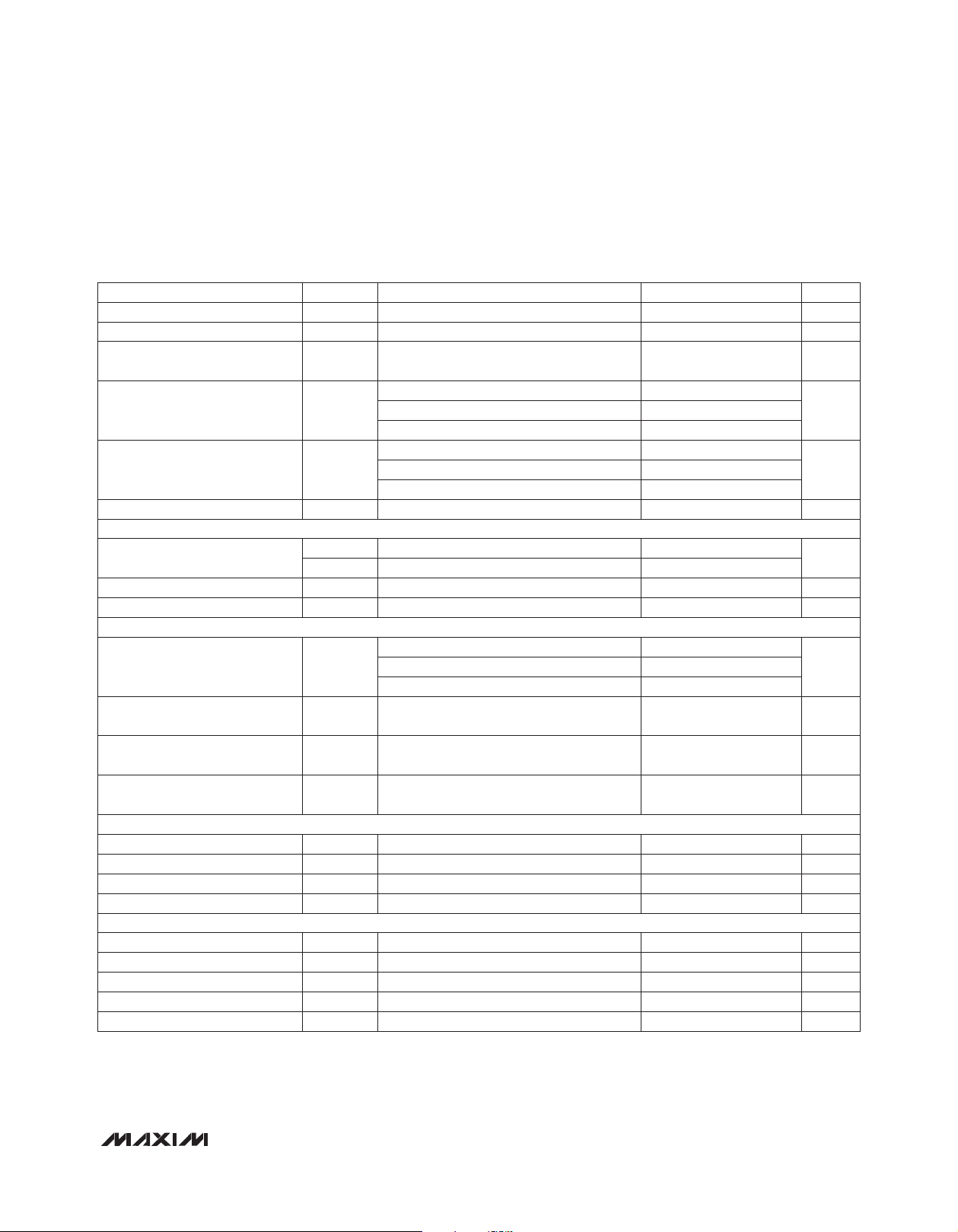
TCK
TDI, TMS
t
6
t
7
TDO
Figure 2. JTAG Timing Diagram
t
1
t
2
t
4
t
5
t
3
_______________________________________________________________________________________ 5
Page 6
6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
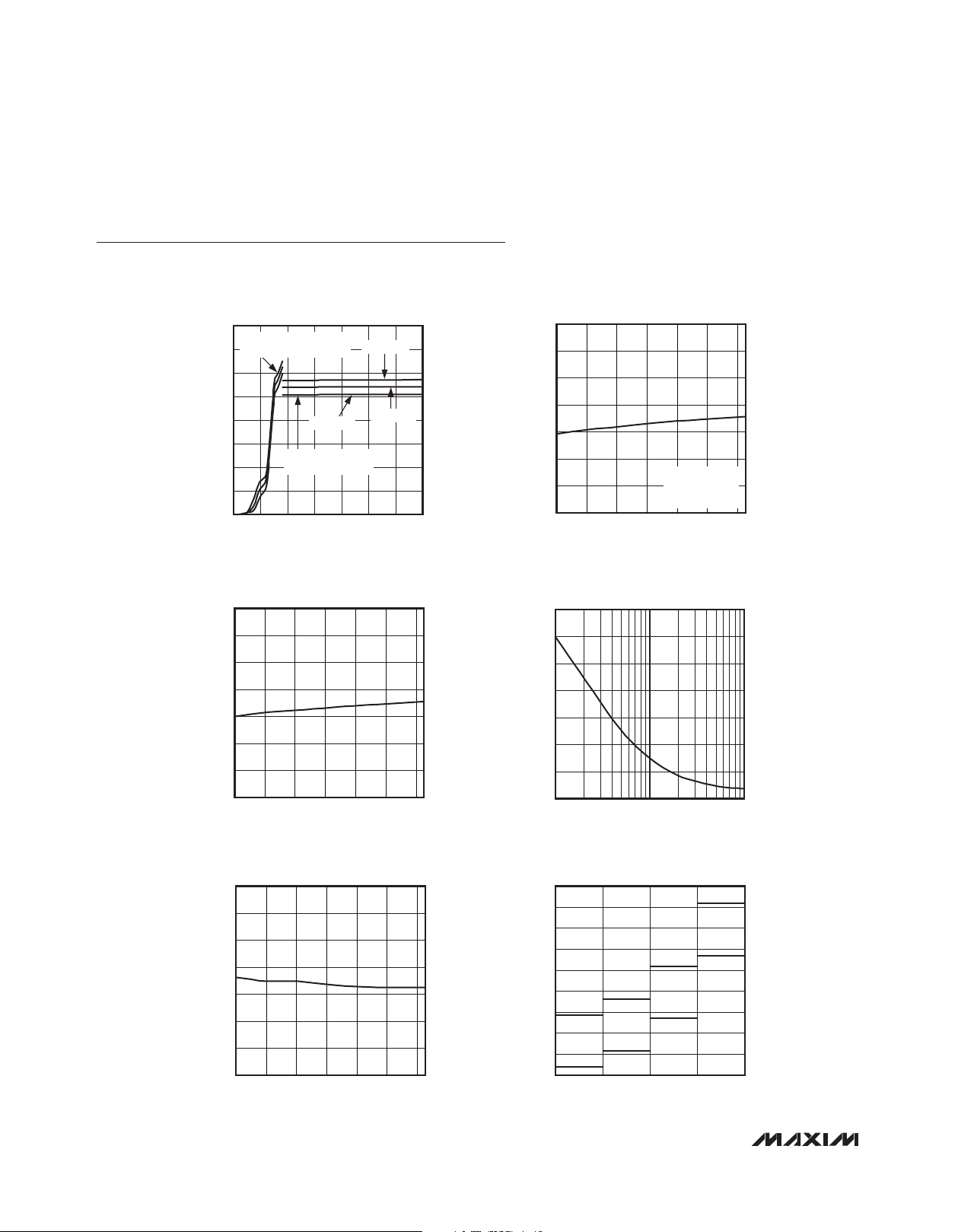
Typical Operating Characteristics
(Typical values are at VCC = 3.3V, TA = +25NC.)
4.0
3.5
MAX16068
3.0
2.5
(mA)
2.0
CC
I
1.5
1.0
0.5
0
0 14
1.055
1.040
1.025
1.010
0.995
0.980
NORMALIZED EN THRESHOLD
0.965
0.950
-40
VCC SUPPLY CURRENT
vs. V
SUPPLY VOLTAGE
CC
ABP AND DBP CONNECTED
TO V
CC
TA = -40°C
ABP AND DBP
REGULATORS ACTIVE
VCC (V)
NORMALIZED EN THRESHOLD
vs. TEMPERATURE
TEMPERATURE (°C)
TA = +85°C
TA = +25°C
12102 4 6 8
806040200-20
MAX16068 toc01
MAX16068 toc03
NORMALIZED MON_THRESHOLD
vs. TEMPERATURE
1.055
1.040
1.025
1.010
0.995
0.980
NORMALIZED MON_ THRESHOLD
0.965
0.950
-40
TEMPERATURE (°C)
5.6V RANGE
HALF-SCALE
PUV THRESHOLD
TRANSIENT DURATION
vs. THRESHOLD OVERDRIVE (EN)
35
30
25
20
15
10
TRANSIENT DURATION (µs)
5
0
1 100
10
EN OVERDRIVE (mV)
MAX16068 toc02
806040200-20
MAX16068 toc04
NORMALIZED TIMING ACCURACY
vs. TEMPERATURE
1.055
1.040
1.025
1.010
0.995
0.980
NORMALIZED SLOT DELAY
0.965
0.950
-40
TEMPERATURE (°C)
806040200-20
MAX16068 toc05
90
80
70
60
50
40
30
TRANSIENT DURATION (us)
20
10
0
TRANSIENT DURATION
vs. MON_ DEGLITCH
2
DEGLITCH VALUE
1684
6 ______________________________________________________________________________________
MAX16068 toc06
Page 7
6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
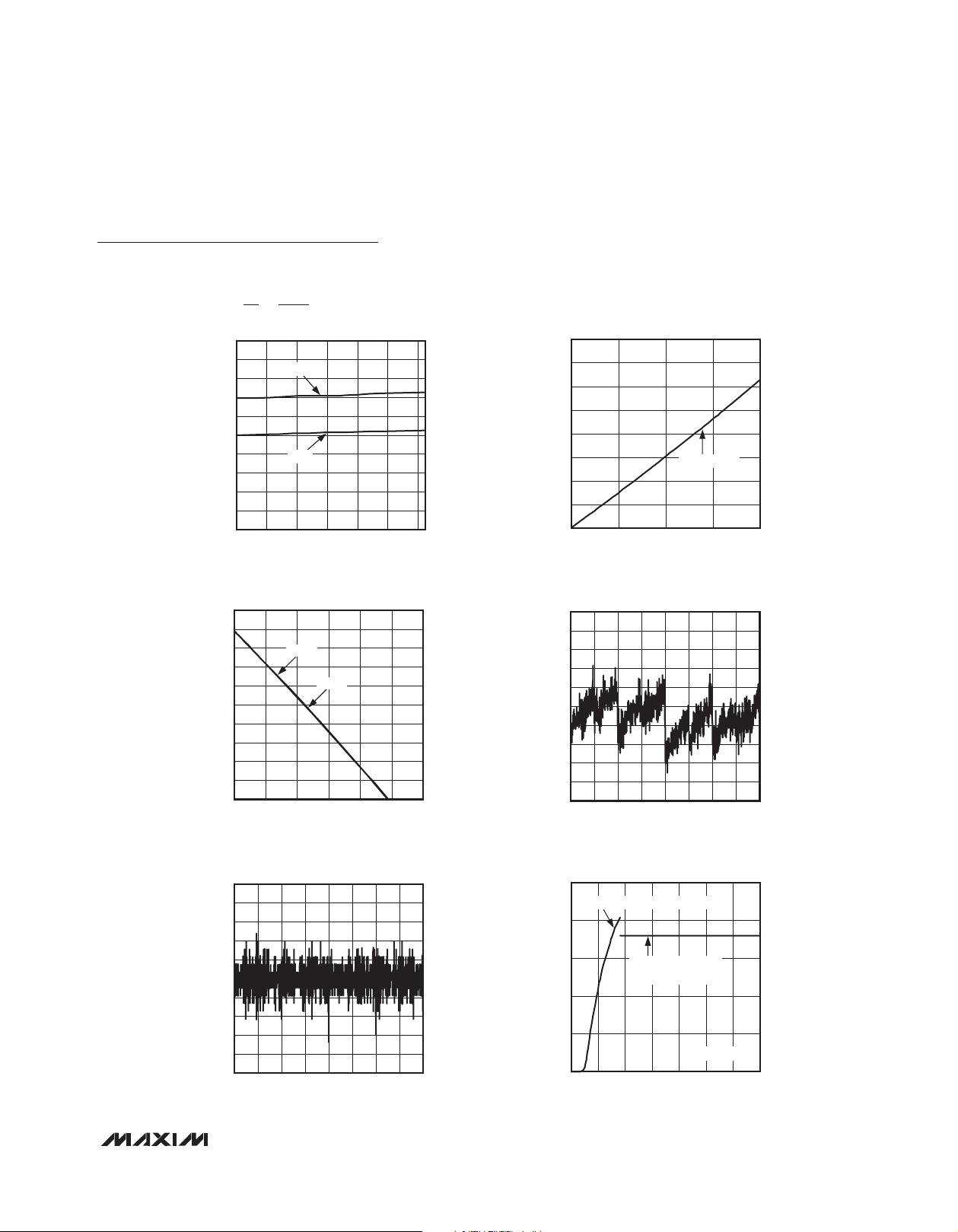
Typical Operating Characteristics (continued)
(Typical values are at VCC = 3.3V, TA = +25NC.)
MAX16068
MR TO RESET PROPAGATION DELAY
vs. TEMPERATURE
1100
1000
900
800
700
600
DELAY (ns)
500
400
300
200
100
MAX
MIN
TEMPERATURE (°C)
OUTPUT-VOLTAGE HIGH vs.
SOURCE CURRENT (PUSH-PULL OUTPUT)
3.4
3.3
3.2
3.1
3.0
(V)
2.9
OUT
V
2.8
2.7
2.6
2.5
2.4
0 1200
RESET
I
SOURCE
GPIO_
(µA)
DIFFERENTIAL NONLINEARITY vs. CODE
1.0
0.8
0.6
0.4
0.2
0
DNL (LSB)
-0.2
-0.4
-0.6
-0.8
-1.0
0 1024
CODE (LSB)
OUTPUT VOLTAGE vs. SINK CURRENT
(OUT = LOW)
0.40
806040200-20-40
MAX16068 toc07
0.35
0.30
0.25
(V)
0.20
OUT
V
0.15
0.10
0.05
0
0 20
I
SINK
RESET, GPIO_
(mA)
15105
MAX16068 toc08
INTEGRAL NONLINEARITY vs. CODE
1.0
0.8
MAX16068 toc09
1000800600400200
0.6
0.4
0.2
0
INL (LSB)
-0.2
-0.4
-0.6
-0.8
-1.0
0 1024
CODE (LSB)
MAX16068 toc10
896768512 640256 384128
RESET OUTPUT CURRENT
vs. V
SUPPLY VOLTAGE
25
MAX16068 toc11
896768512 640256 384128
20
15
10
OUTPUT CURRENT (mA)
5
0
0 14
CC
ABP AND DBP CONNECTED TO V
ABP AND DBP
REGULATORS ACTIVE
V
RESET
VCC (V)
CC
MAX16068 toc12
= 0.3V
12108642
_______________________________________________________________________________________ 7
Page 8
6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
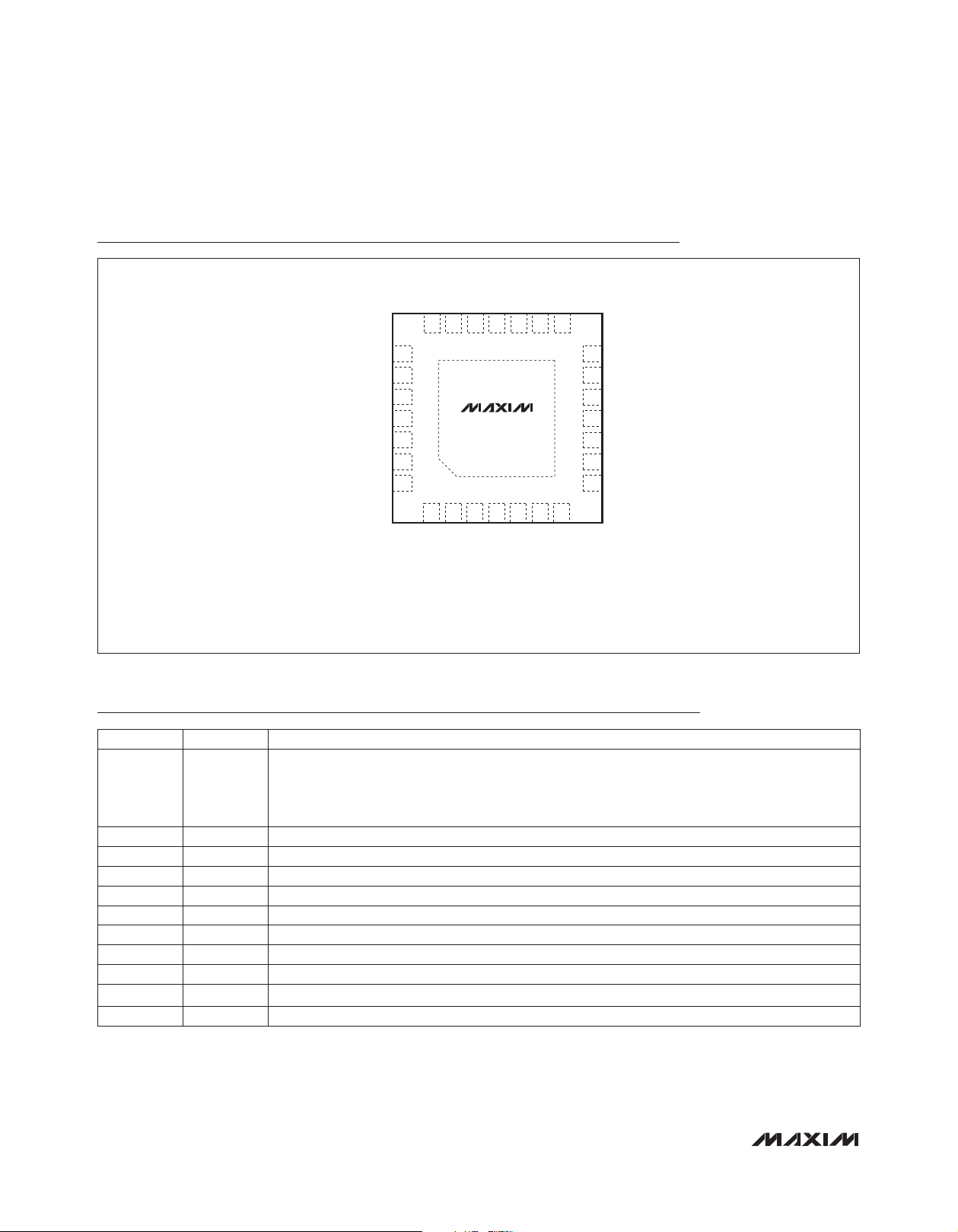
Pin Configuration
MAX16068
TOP VIEW
MON3
MON4
MON5
MON6
RESET
GPIO1
GPIO2
MON2
MON1
2021 19 17 16 15
22
23
24
25
26
27
28
1 2 4 5 6 7
+
GPIO3
GPIO4
MAX16068
3
GPIO5
GND
18
ABP
GPIO6
CC
V
GND
EP*
DBP
AO
EN
SCL
N.C.
14
N.C.
13
12
TMS
11
TCK
10
TDI
9
TDO
8
SDA
THIN QFN
(5mm x 5mm)
*CONNECT EXPOSED PAD TO GND.
Pin Description
PIN NAME FUNCTION
GPIO3–
1–4, 27, 28
GPIO6,
GPIO1,
General-Purpose Inputs/Outputs. Each GPIO_ can be configured to act as an input, a push-pull
output, an open-drain output, or a special function.
GPIO2
5, 19 GND Ground. Connect all GNDs together.
6 A0 Four-State SMBus Address. Address is sampled upon POR.
7 SCL SMBus Serial-Clock Input
8 SDA SMBus Serial-Data Open-Drain Input/Output
9 TDO JTAG Test Data Output
10 TDI JTAG Test Data Input
11 TCK JTAG Test Clock
12 TMS JTAG Test Mode Select
13, 14 N.C. No Connection. Not internally connected.
15 EN Analog Enable Input. All outputs deassert when VEN is below the enable threshold.
8 ______________________________________________________________________________________
Page 9
6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Pin Description (continued)
PIN NAME FUNCTION
16 DBP
17 V
CC
18 ABP
20–25
MON1–
MON6
26 RESET Configurable Reset Output
— EP
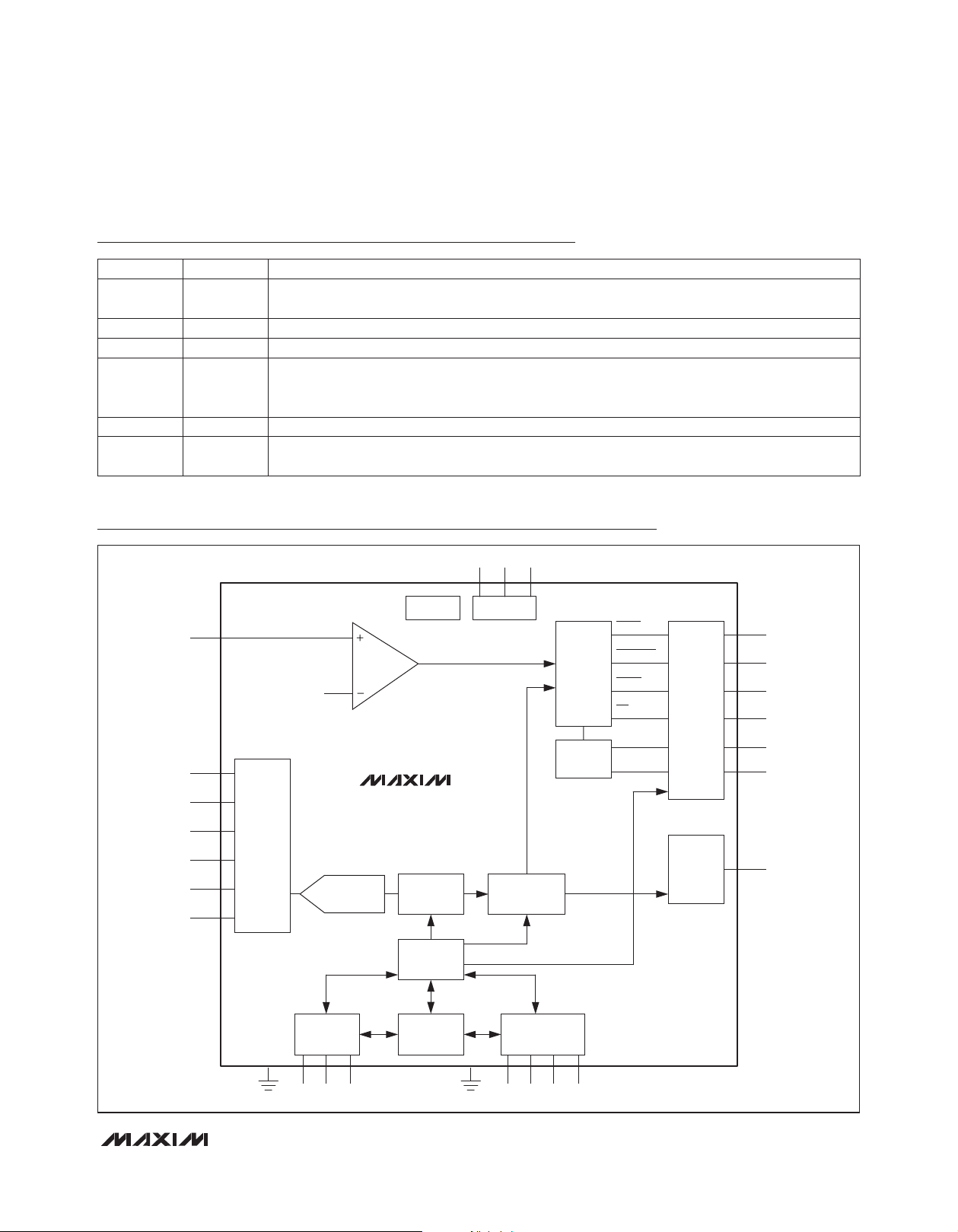
Functional Diagram
EN
MON1
Digital Bypass. All push-pull outputs are referenced to DBP. Bypass DBP with a 1FF capacitor to
GND.
Power-Supply Input. Bypass VCC to GND with a 10FF ceramic capacitor.
Analog Bypass. Bypass ABP to GND with a 1FF ceramic capacitor.
Monitor Voltage Inputs. Set the monitor voltage range through the configuration registers.
Measured values are written to the ADC registers and can be read back through the SMBus or
JTAG interface.
Exposed Pad. Internally connected to GND. Connect to ground, but do not use EP as the main
ground connection.
ABP
V
V
REF REG
TH_EN
DBP
CC
GPIO1
GPIO2
GPIO3
GPIO4
GPIO5
GPIO6
DECODE
LOGIC
WATCHDOG
TIMER
ALERT
EXTFAULT
FAULT
MR
WDI
WDO
GPIO
CONTROL
MAX16068
MON2
MON3
MON4
MON5
MON6
VOLTAGE
AND
SCALING
MUX
10-BIT ADC
SMBus
INTERFACE
AO SCL SDA
(SAR)
MAX16068
ADC
REGISTERS
RAM
REGISTERS
FLASH
REGISTERS
DIGITAL
COMPARATORS
INTERFACE
TDI TCK TMSGND GND
TDO
JTAG
RESET
OUTPUT
LOGIC
RESET
_______________________________________________________________________________________ 9
Page 10
6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Detailed Description
The MAX16068 monitors up to six system power supplies. The monitoring phase begins after boot-up if EN is
high and the software enable bit is set to ‘1’. An internal
multiplexer cycles through each MON_ input. At each
multiplexer stop, the 10-bit ADC converts the monitored
analog voltage to a digital result and stores the result in
a register. Each time a conversion cycle (5Fs, max) completes, internal logic circuitry compares the conversion
MAX16068
results to the overvoltage and undervoltage thresholds
stored in memory. When a result violates a programmed
threshold, the conversion can be configured to generate
a fault. GPIO_ can be programmed to assert on combinations of faults. Additionally, faults can be configured to
trigger the nonvolatile fault logger, which writes all fault
information automatically to the flash and write-protects
the data to prevent accidental erasure.
The MAX16068 contains both SMBus and JTAG serial
interfaces for accessing registers and flash. Use only
one interface at any given time. For more information
on how to access the internal memory through these
interfaces, see the SMBus-Compatible Serial Interface
and JTAG Serial Interface sections. The memory map
is divided into three pages with access controlled by
special SMBus and JTAG commands.
The factory-default values at POR (power-on reset) for all
RAM registers are ‘0’s. POR occurs when VCC reaches
the undervoltage-lockout threshold (UVLO) of 2.7V
(max). At POR, the device begins a boot-up sequence.
During the boot-up sequence, all monitored inputs are
masked from initiating faults and flash contents are
copied to the respective register locations. During bootup, the MAX16068 is not accessible through the serial
interface. The boot-up sequence takes up to 150Fs, after
which the device is ready for normal operation. RESET
is asserted low up to the boot-up phase after which it
assumes its programmed active state. RESET remains
active for its programmed timeout period once all monitored channels are within their respective thresholds. Up
to the boot-up phase, the GPIO_s are high impedance.
Power
Apply 2.8V to 14V to VCC to power the MAX16068.
Bypass VCC to ground with a 10FF capacitor. Two internal voltage regulators, ABP and DBP, supply power to
the analog and digital circuitry within the device. For
operation at 3.6V or lower, disable the regulators by connecting ABP and DBP to VCC.
ABP is a 3.0V (typ) voltage regulator that powers the internal analog circuitry. Bypass ABP to GND with a 1FF ceramic capacitor installed as close as possible to the device.
DBP is an internal 3.0V (typ) voltage regulator. DBP
powers flash and digital circuitry. All push-pull outputs
refer to DBP. DBP supplies the input voltage to the internal charge pump when the programmable outputs are
configured as charge-pump outputs. Bypass the DBP
output to GND with a 1FF ceramic capacitor installed as
close as possible to the device.
Do not power external circuitry from ABP or DBP.
Enable Input (EN)
To enable monitoring, the voltage at EN must be above
1.24V (typ) and the software enable bit in r73h[0] must
be set to ‘1.’ To disable monitoring, either pull EN
below 1.215V (typ) or set the software enable bit to ‘0.’
See Table 1 for the software enable bit configurations.
Connect EN to ABP if not used.
Table 1. Software Enable Configurations
REGISTER
ADDRESS
73h 273h
10 _____________________________________________________________________________________
FLASH
ADDRESS
BIT RANGE DESCRIPTION
Software Enable
[0]
[1] Reserved
[2] 1 = Margin mode enabled
[3] Reserved
[4]
1 = Sequencing enabled
0 = Power-down
Independent watchdog mode enable
1 = Watchdog timer is independent of EN input
0 = Watchdog timer boots after EN goes high and the boot-up delay completes
Page 11
6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
When in the monitoring state, and when EN falls below
the undervoltage threshold, a register bit, ENRESET
(r20h[2]), is set to a ‘1.’ This register bit latches and must
be cleared through software. This bit indicates if RESET
asserted low due to EN going under the threshold. The
POR state of ENRESET is ‘0.’ The bit is only set on a falling edge of the EN comparator output or the software
enable bit. If operating in latch-on fault mode, toggle
EN or toggle the software enable bit to clear the latch
condition and restart the device once the fault condition
has been removed.
Set r73h[2] to ‘1’ to enable monitoring functionality.
Faults are not recorded when the device is in margining
mode. Set r73h[2] to ‘0’ for normal functionality.
Voltage Monitoring
The MAX16068 features an internal 10-bit ADC that monitors the MON_ voltage inputs. An internal multiplexer
cycles through each of the enabled inputs, taking less
than 24Fs for a complete monitoring cycle. Each acquisition takes approximately 4Fs. At each multiplexer stop,
the 10-bit ADC converts the analog input to a digital
result and stores the result in a register. ADC conversion
results are stored in registers r00h–r0Bh (see Table 2).
Use the SMBus or JTAG serial interface to read ADC
conversion results.
The MAX16068 provides six inputs, MON1–MON6, for
voltage monitoring. Each input-voltage range is programmable in registers r43h–r44h (see Table 3). When
MON_ configuration registers are set to ’11,’ MON_ voltages are not monitored and the multiplexer does not stop
at these inputs, decreasing the total cycle time. These
inputs cannot be configured to trigger fault conditions.
The two programmable thresholds for each monitored
voltage include an overvoltage and an undervoltage
threshold. See the Faults section for more information
on setting overvoltage and undervoltage thresholds. All
voltage thresholds are 8 bits wide. The 8 MSBs of the
10-bit ADC conversion result are compared to these
overvoltage and undervoltage thresholds.
For any undervoltage or overvoltage condition to be
monitored and any faults detected, the MON_ input must
be assigned to monitoring mode. Inputs that are not
enabled are not converted by the ADC; they contain the
last value acquired before that channel was disabled.
The ADC conversion result registers are reset to 00h at
boot-up. These registers are not reset when a reboot
command is executed.
To temporarily disable voltage monitoring during voltage margining conditions, set r73h[2] to ‘1’ to enable
margining mode functionality. Faults (except for faults
triggered by EXTFAULT being pulled low externally) are
not recorded when the device is in margining mode, but
the ADC continues to run and conversion results continue to be available. Set r73h[2] back to ‘0’ for normal
functionality.
MAX16068
Table 2. ADC Conversion Results (Read Only)
REGISTER ADDRESS BIT RANGE DESCRIPTION
00h [7:0] MON1 result (MSB)
01h [7:6] MON1 result (LSB)
02h [7:0] MON2 result (MSB)
03h [7:6] MON2 result (LSB)
04h [7:0] MON3 result (MSB)
05h [7:6] MON3 result (LSB)
06h [7:0] MON4 result (MSB)
07h [7:6] MON4 result (LSB)
08h [7:0] MON5 result (MSB)
09h [7:6] MON5 result (LSB)
0Ah [7:0] MON6 result (MSB)
0Bh [7:6] MON6 result (LSB)
______________________________________________________________________________________ 11
Page 12
6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Table 3. ADC Configuration Registers
REGISTER ADDRESS FLASH ADDRESS BIT RANGE DESCRIPTION
MON1 Full-Scale Range
00 = 5.6V
[1:0]
MAX16068
[3:2]
43h 243h
[5:4]
[7:6]
[1:0]
44h 244h
[3:2]
[7:4] Not used
01 = 2.8V
10 = 1.4V
11 = channel not converted
MON2 Full-Scale Range
00 = 5.6V
01 = 2.8V
10 = 1.4V
11 = channel not converted
MON3 Full-Scale Range
00 = 5.6V
01 = 2.8V
10 = 1.4V
11 = channel not converted
MON4 Full-Scale Range
00 = 5.6V
01 = 2.8V
10 = 1.4V
11 = channel not converted
MON5 Full-Scale Range
00 = 5.6V
01 = 2.8V
10 = 1.4V
11 = channel not converted
MON6 Full-Scale Range
00 = 5.6V
01 = 2.8V
10 = 1.4V
11 = channel not converted
t
Boot-Up Delay
Once EN is above its threshold and the software enable
bit is set, a boot-up delay occurs before monitoring
where t
4 MSBs and b is the decimal value of the 4 LSBs.
= (5 x 10-6) x 2a x (16 + b) + 480µs
BOOT
is in seconds, a is the decimal value of the
BOOT
begins. This delay is configured in register 77h as shown
in Table 4, and it is stored as an 8-bit value calculated
as follows:
Table 4. Boot-Up Delay
REGISTER
ADDRESS
77h 277h [7:0] Boot-up delay
12 _____________________________________________________________________________________
FLASH
ADDRESS
BIT
RANGE
DESCRIPTION
Page 13

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
General-Purpose Inputs/Outputs
GPIO1–GPIO6 are programmable general-purpose
inputs/outputs. GPIO1–GPIO6 are configurable as a
manual reset input, a watchdog timer input and output,
logic inputs/outputs, and fault-dependent outputs. When
programmed as outputs, GPIO_s are open-drain or
push-pull. See Tables 5 and 6 for more detailed information on configuring GPIO1–GPIO6.
Table 5. GPIO_ Configuration Registers
REGISTER ADDRESS FLASH ADDRESS BIT RANGE DESCRIPTION
[1:0] GPIO1 configuration
3Fh 23Fh
40h 240h
[3:2] GPIO2 configuration
[5:4] GPIO3 configuration
[7:6] GPIO4 configuration
[1:0] GPIO5 configuration
[3:2] GPIO6 configuration
[7:5] Not used
Table 6. GPIO_ Function Configuration Bits
GPIO1 GPIO2 GPIO3 GPIO4 GPIO5 GPIO6
00 Logic input Logic input Logic input Logic input Logic input Logic input
01
10
11
Logic output
(push-pull)
Logic output
(open drain)
ALERT (open drain)
Logic output
(push-pull)
Logic output
(open drain)
FAULT (open drain)
When GPIO1–GPIO6 are configured as general-purpose inputs/outputs, read values from the GPIO_ ports
through r1Eh and write values to GPIO_s through r3Eh.
Note that r3Eh has a corresponding flash register, which
programs the default state of a general-purpose output.
See Table 7 for more information on reading and writing
to the GPIO_.
[4] ARAEN bit
Logic output
(push-pull)
Logic output
(open drain)
MR input
Logic output
(push-pull)
Logic output
(open drain)
WDI
Logic output
(push-pull)
Logic output
(open drain)
WDO
(open drain)
Logic output
(push-pull)
Logic output
(open drain)
EXTFAULT
(open drain)
MAX16068
Table 7. GPIO_ State Registers
REGISTER
ADDRESS
1Eh —
3Eh 23Eh
FLASH
ADDRESS
______________________________________________________________________________________ 13
BIT RANGE DESCRIPTION
[0] GPIO1 input state
[1] GPIO2 input state
[2] GPIO3 input state
[3] GPIO4 input state
[4] GPIO5 input state
[5] GPIO6 input state
[7:6] Not used
[0] GPIO1 output state
[1] GPIO2 output state
[2] GPIO3 output state
[3] GPIO4 output state
[4] GPIO5 output state
[5] GPIO6 output state
[7:6] Not used
Page 14

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
GPIO1 is configurable as the SMBus alert signal, ALERT.
ALERT asserts when any fault condition occurs. When the
SMBus host sends the ARA (Alert Response Address),
the MAX16068 responds with its slave address and
deasserts ALERT. ALERT is an open-drain output.
Set the ARAEN bit in r40h[4] to ‘1’ to disable the ARA
feature. Under these conditions, the device does not
respond to an ARA on the SMBus line.
MAX16068
GPIO2 is configurable as a dedicated fault output,
FAULT. FAULT asserts when an overvoltage or undervoltage condition occurs on the selected inputs. FAULT
dependencies are set using registers r36h and r37h
(see Table 8). When FAULT depends on more than one
MON_, the fault output asserts when one or more MON_
exceeds a programmed threshold voltage. FAULT acts
independently of the critical fault system, described in
the Critical Faults section. Use r37h[7] to set the polarity
of FAULT.
ALERT
FAULT
Manual Reset (MR)
GPIO3 is configurable to act as an active-low manual reset
input, MR. Drive MR low to assert RESET. RESET remains
asserted for the selected reset timeout period after MR
transitions from low to high. When connecting MR to a push-
button, use a pullup resistor. See the Reset Output section
for more information on selecting a reset timeout period.
Watchdog Input (WDI) and Output (WDO)
GPIO4 and GPIO5 are configurable as the watchdog
timer input (WDI) and output, WDO, respectively. See
Table 16 for configuration details. WDO is an open-drain,
active-low output. See the Watchdog Timer section for
more information about the operation of the watchdog
timer.
External Fault (EXTFAULT)
GPIO6 is configurable as the external fault input/output,
EXTFAULT. EXTFAULT asserts if any monitored voltage exceeds an overvoltage or undervoltage threshold.
EXTFAULT also asserts if a power-up or power-down
sequencing fault occurs. This signal can be used to
cascade multiple MAX16068s.
For the MAX16068, if register bit r6Dh[2] is set in addition to r72h[5], EXTFAULT going low triggers a nonvolatile fault log operation.
Table 8. FAULT Dependencies
REGISTER
ADDRESS
36h 236h
37h 237h
FLASH
ADDRESS
BIT RANGE DESCRIPTION
[0] FAULT depends on MON1 undervoltage threshold
[1] FAULT depends on MON2 undervoltage threshold
[2] FAULT depends on MON3 undervoltage threshold
[3] FAULT depends on MON4 undervoltage threshold
[4] FAULT depends on MON5 undervoltage threshold
[5] FAULT depends on MON6 undervoltage threshold
[7:6] Not used
[0] FAULT depends on MON1 overvoltage threshold
[1] FAULT depends on MON2 overvoltage threshold
[2] FAULT depends on MON3 overvoltage threshold
[3] FAULT depends on MON4 overvoltage threshold
[4] FAULT depends on MON5 overvoltage threshold
[5] FAULT depends on MON6 overvoltage threshold
[6] Not used
[7]
0 = FAULT is an active-low digital output
1 = FAULT is an active-high digital output
14 _____________________________________________________________________________________
Page 15

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Faults
The MAX16068 monitors the input (MON_) channels and
compares the results with an overvoltage threshold and
an undervoltage threshold. Based on these conditions,
the MAX16068 asserts various fault outputs and save
specific information about the channel conditions and
voltages into the nonvolatile flash. Once a critical fault
event occurs, the failing channel condition, ADC conversions at the time of the fault, or both can be saved by
configuring the event logger. The event logger records a
single failure in the internal flash and sets a lock bit that
protects the stored fault data from accidental erasure on
a subsequent power-up.
Table 9. Fault Threshold Registers
The MAX16068 is capable of measuring overvoltage
and undervoltage fault events. Fault conditions are
detected at the end of each ADC conversion. An overvoltage event occurs when the voltage at a monitored
input exceeds the overvoltage threshold for that input.
An undervoltage event occurs when the voltage at a
monitored input falls below the undervoltage threshold.
Fault thresholds are set in registers r49h–r59h as shown
in Table 9. Disabled inputs are not monitored for fault
conditions and are skipped over by the input multiplexer.
Only the upper 8 bits of a conversion result are compared with the programmed fault thresholds.
MAX16068
REGISTER
ADDRESS
48h 248h [7:0] Not used
49h 249h [7:0] MON1 overvoltage threshold
4Ah 24Ah [7:0] MON1 undervoltage threshold
4Bh 24Bh [7:0] Not used
4Ch 24Ch [7:0] MON2 overvoltage threshold
4Dh 24Dh [7:0] MON2 undervoltage threshold
4Eh 24Eh [7:0] Not used
4Fh 24Fh [7:0] MON3 overvoltage threshold
50h 250h [7:0] MON3 undervoltage threshold
51h 251h [7:0] Not used
52h 252h [7:0] MON4 overvoltage threshold
53h 253h [7:0] MON4 undervoltage threshold
54h 254h [7:0] Not used
55h 255h [7:0] MON5 overvoltage threshold
56h 256h [7:0] MON5 undervoltage threshold
57h 257h [7:0] Not used
58h 258h [7:0] MON6 overvoltage threshold
59h 259h [7:0] MON6 undervoltage threshold
FLASH
ADDRESS
BIT RANGE DESCRIPTION
______________________________________________________________________________________ 15
Page 16

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Deglitch
Fault conditions are detected at the end of each conversion. When the voltage on an input falls outside a monitored threshold for one acquisition, the input multiplexer
remains on that channel and performs several successive conversions. To trigger a fault, the input must stay
outside the threshold for a certain number of acquisitions
as determined by the deglitch setting in r74h[6:5] (see
Table 10).
MAX16068
Table 10. Deglitch Configuration
REGISTER
ADDRESS
74h 274h [6:5]
Table 11. Fault Flags
REGISTER
ADDRESS
1Bh
1Ch
FLASH
ADDRESS
BIT RANGE DESCRIPTION
[0] MON1 undervoltage threshold
[1] MON2 undervoltage threshold
[2] MON3 undervoltage threshold
[3] MON4 undervoltage threshold
[4] MON5 undervoltage threshold
[5] MON6 undervoltage threshold
[7:6] Reserved
[0] MON1 overvoltage threshold
[1] MON2 overvoltage threshold
[2] MON3 overvoltage threshold
[3] MON4 overvoltage threshold
[4] MON5 overvoltage threshold
[5] MON6 overvoltage threshold
[6]
[7] SMB alert
BIT RANGE DESCRIPTION
External fault (EXTFAULT)
Fault Flags
Fault flags indicate the fault status of a particular input.
The fault flag of any monitored input in the device can be
read at any time from registers r1Bh and r1Ch, as shown
in Table 11. Clear a fault flag by writing a ‘1’ to the appropriate bit in the flag register. Unlike the fault signals sent
to the fault outputs, these bits are masked by the critical
fault enable bits (see Table 12). The fault flag is only set
when the matching enable bit in the critical fault enable
register is also set.
Voltage Comparator Deglitch Configuration
00 = 2 cycles
01 = 4 cycles
10 = 8 cycles
11 = 16 cycles
16 _____________________________________________________________________________________
Page 17

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
If GPIO6 is configured as the EXTFAULT input/output
and EXTFAULT is pulled low by an external circuit, bit
r1Ch[6] is set.
The SMB Alert (ALERT) bit is set if the MAX16068 has
asserted the SMBus Alert output. Clear by writing a ‘1’.
See the SMBALERT (ALERT) section for more details.
Table 12. Critical Fault Configuration
REGISTER
ADDRESS
6Dh 26Dh
6Eh 26Eh
6Fh 26Fh
70h
71h 271h [7:0] Not used
72h 272h
FLASH
ADDRESS
270h
BIT
RANGE
Fault Information to Log
00 = Save failed line flags and ADC values in flash
[1:0]
[2] 1 = Fault log triggered when EXTFAULT is pulled low externally
[7:3] Not used
[0] 1 = Fault log triggered when MON1 is below its undervoltage threshold
[1] 1 = Fault log triggered when MON2 is below its undervoltage threshold
[2] 1 = Fault log triggered when MON3 is below its undervoltage threshold
[3] 1 = Fault log triggered when MON4 is below its undervoltage threshold
[4] 1 = Fault log triggered when MON5 is below its undervoltage threshold
[5] 1 = Fault log triggered when MON6 is below its undervoltage threshold
[7:6] Not used
[3:0] Not used
[4] 1 = Fault log triggered when MON1 is above its overvoltage threshold
[5] 1 = Fault log triggered when MON2 is above its overvoltage threshold
[6] 1 = Fault log triggered when MON3 is above its overvoltage threshold
[7] 1 = Fault log triggered when MON4 is above its overvoltage threshold
[0] 1 = Fault log triggered when MON5 is above its overvoltage threshold
[1] 1 = Fault log triggered when MON6 is above its overvoltage threshold
[7:2] Not used
[4:0] Not used
[5]
[7:6] Not used
01 = Save only failed line flags in flash
10 = Save only ADC values in flash
11 = Do not save anything
1 = EXTFAULT pulled low externally causes the device to stop monitoring until EN
is toggled or the autoretry delay expires (see Autoretry/Latch Mode section)
0 = EXTFAULT pulled low externally does not cause the device to stop monitoring
During normal operation, a fault condition can be stored
in the flash memory by setting the appropriate critical
fault enable bits. Set the appropriate critical fault enable
bits in registers r6Eh–r72h (see Table 12) for a fault condition to trigger a critical fault.
DESCRIPTION
Critical Faults
MAX16068
______________________________________________________________________________________ 17
Page 18

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Logged fault information is stored in flash registers
r200h–r208h (see Table 13). After fault information is
logged, the flash is locked and must be unlocked to
enable a new fault log to be stored. Write a ‘0’ to r8Ch[1]
to unlock the configuration flash. Fault information can
be configured to store ADC conversion results and/or
fault flags in registers. Select the critical fault configuration in r6Dh[1:0]. Set r6Dh[1:0] to ‘11’ to turn off the fault
logger. All stored ADC results are 8 bits wide (MSBs of
MAX16068
the conversion).
Table 13. Nonvolatile Fault Log Registers
FLASH
ADDRESS
200h [7:0] Reserved
201h
202h
203h [7:0] MON1 ADC output (8 MSBs)
204h [7:0] MON2 ADC output (8 MSBs)
205h [7:0] MON3 ADC output (8 MSBs)
206h [7:0] MON4 ADC output (8 MSBs)
207h [7:0] MON5 ADC output (8 MSBs)
208h [7:0] MON6 ADC output (8 MSBs)
BIT RANGE DESCRIPTION
[0] Fault log triggered on MON1 falling below its undervoltage threshold
[1] Fault log triggered on MON2 falling below its undervoltage threshold
[2] Fault log triggered on MON3 falling below its undervoltage threshold
[3] Fault log triggered on MON4 falling below its undervoltage threshold
[4] Fault log triggered on MON5 falling below its undervoltage threshold
[5] Fault log triggered on MON6 falling below its undervoltage threshold
[7:6] Not used
[0] Fault log triggered on MON1 exceeding its overvoltage threshold
[1] Fault log triggered on MON2 exceeding its overvoltage threshold
[2] Fault log triggered on MON3 exceeding its overvoltage threshold
[3] Fault log triggered on MON4 exceeding its overvoltage threshold
[4] Fault log triggered on MON5 exceeding its overvoltage threshold
[5] Fault log triggered on MON6 exceeding its overvoltage threshold
[6]
[7] Not used
Fault log triggered on EXTFAULT
Autoretry/Latch Mode
The MAX16068 can be configured for one of two fault
management methods: autoretry or latch-on-fault. Set
r74h[4:3] to ‘00’ to select the latch-on-fault mode. The
device does not reinitiate monitoring until EN is toggled
or the software enable bit is toggled. See the Enable
Input (EN) section for more information on setting the
software enable bit.
18 _____________________________________________________________________________________
Page 19

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Set r74h[4:3] to a value other than ‘00’ to select autoretry
mode (see Table 14). In this configuration, the device
stops monitoring after a critical fault event then monitors again following the boot-up delay plus 20ms (see
the Boot-Up Delay section). Use r74h[2:0] to select an
autoretry delay from 20ms to 1.6s. See Table 14 for more
information on setting the autoretry delay.
When fault information is stored in flash (see the Critical
Faults section) and autoretry mode is selected, set an
autoretry delay greater than the time required for the
storing operation. When fault information is stored in
flash and latch-on-fault mode is chosen, toggle EN or
reset the software enable bit only after the completion
of the storing operation. When saving information about
the failed lines only, ensure a delay of at least 102ms
before the restart procedure. Otherwise, ensure a minimum 153ms timeout, to ensure that ADC conversions
are completed and values are stored correctly in flash.
The reset output, RESET, indicates the status of the
monitored inputs. It asserts during the boot phase and
deasserts following the reset timeout period once the
monitored input voltage is within the undervoltage/overvoltage.
During normal monitoring, RESET can be configured to
assert when any combination of MON_ inputs violates
configurable combinations of undervoltage or overvoltage thresholds. Select the combination of MON_ inputs
using r3Ch[5:0] and r3Dh[5:0]. Note that MON_ inputs
configured as critical faults always cause RESET to
assert regardless of these configuration bits.
RESET can be configured as push-pull or open drain
using r3Bh[3], and active high or active low using
r3Bh[2]. Select the reset timeout by loading a value from
Table 15 into r3Bh[7:4].
To generate a one-shot pulse on RESET, write a ‘1’ into
r3Bh[0]. The pulse width is the configured reset timeout.
Register bit r3Bh[0] clears automatically (see Table 15).
The current state of RESET can be checked by reading
r20h[0].
Reset Output
MAX16068
Table 14. Autoretry Configuration
REGISTER
ADDRESS
74h 274h
FLASH
ADDRESS
BIT
RANGE
[2:0]
[4:3]
Retry Delay
000 = 20ms
001 = 40ms
010 = 80ms
011 = 150ms
100 = 280ms
101 = 540ms
110 = 1s
111 = 2s
Autoretry/Latch Mode
00 = Latch
01 = Retry 1 time
10 = Retry 3 times
11 = Always retry
DESCRIPTION
______________________________________________________________________________________ 19
Page 20

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Table 15. Reset Output Configuration
REGISTER
ADDRESS
MAX16068
3Bh 23Bh
3Ch 23Ch
3Dh 23Dh
FLASH
ADDRESS
BIT RANGE DESCRIPTION
RESET Soft Trigger
[0]
[1] Not used
[2]
[3]
[7:4]
[0] 1 = RESET depends on MON1 undervoltage
[1] 1 = RESET depends on MON2 undervoltage
[2] 1 = RESET depends on MON3 undervoltage
[3] 1 = RESET depends on MON4 undervoltage
[4] 1 = RESET depends on MON5 undervoltage
[5] 1 = RESET depends on MON6 undervoltage
[7:6] Not used
[0] 1 = RESET depends on MON1 overvoltage
[1] 1 = RESET depends on MON2 overvoltage
[2] 1 = RESET depends on MON3 overvoltage
[3] 1 = RESET depends on MON4 overvoltage
[4] 1 = RESET depends on MON5 overvoltage
[5] 1 = RESET depends on MON6 overvoltage
[7:6] Not used
0 = Normal RESET behavior
1 = Force RESET to assert
0 = Active low
1 = Active high
0 = Open drain
1 = Push-pull
Reset Timeout Period
0000 = 25Fs
0001 = 1.5ms
0010 = 2.5ms
0011 = 4ms
0100 = 6ms
0101 = 10ms
0110 = 15ms
0111 = 25ms
1000 = 40ms
1001 = 60ms
1010 = 100ms
1011 = 150ms
1100 = 250ms
1101 = 400ms
1110 = 600ms
1111 = 1s
20 _____________________________________________________________________________________
Page 21

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Watchdog Timer
The watchdog timer operates together with or independently of the MAX16068. When operating in dependent
mode, the watchdog is not activated until RESET is
deasserted. When operating in independent mode,
the watchdog timer activates immediately after VCC
exceeds the UVLO threshold and the boot phase is
complete. Set r73h[4] to ‘0’ to configure the watchdog
in dependent mode. Set r73h[4] to ‘1’ to configure the
watchdog in independent mode. See Table 16 for more
information on configuring the watchdog timer in dependent or independent mode. The watchdog timer can be
reset by toggling the WDI inputs (GPIO4) or by writing a
‘1’ to r75h[5].
Dependent Watchdog Timer Operation
Use the watchdog timer to monitor FP activity in two
modes. Flexible timeout architecture provides an adjustable watchdog startup delay of up to 300s, allowing
complicated systems to complete lengthy boot-up routines. An adjustable watchdog timeout allows the supervisor to provide quick alerts when the processor activity
fails. After each reset event (VCC drops below UVLO
then returns above UVLO, software reboot, manual reset
(MR), EN input going low then high, or watchdog reset),
the watchdog startup delay provides an extended time
for the system to power up and fully initialize all FP and
system components before assuming responsibility for
routine watchdog updates. Set r76h[6:4] to a value other
than ‘000’ to enable the watchdog startup delay. Set
r76h[6:4] to ‘000’ to disable the watchdog startup delay.
The normal watchdog timeout period, t
, begins after
WDI
the first transition on WDI before the conclusion of the
long startup watchdog period, t
WDI_STARTUP
(Figures 3
and 4). During the normal operating mode, WDO asserts
if the FP does not toggle WDI with a valid transition (high-
to-low or low-to-high) within the standard timeout period,
t
. WDO remains asserted until WDI is toggled or
WDI
RESET is asserted (Figure 4).
While EN is low, the watchdog timer is in reset. The
watchdog timer does not begin counting until the monitoring starts and RESET is deasserted. The watchdog
timer is reset and WDO deasserts any time RESET is
asserted (Figure 5). The watchdog timer is held in reset
while RESET is asserted.
MAX16068
LAST MON_
WDI
RESET
Figure 3. Normal Watchdog Startup Sequence
V
CC
WDI
0V
V
CC
WDO
0V
Figure 4. Watchdog Timer Operation
< t
WDI
WDI
< t
WDI
< t
V
TH
< t
WDI
t
WDI_STARTUP
< t
WDI
t
RP
> t
WDI
t
WDI
< t
WDI
WDI
< t
WDI
< t
______________________________________________________________________________________ 21
Page 22

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
V
CC
WDI
V
RESET
< t
WDI
0V
CC
0V
t
WDI
t
RP
< t
WDI_STARTUP
< t
WDI
MAX16068
WDO
V
CC
0V
1µs
Figure 5. Watchdog Startup Sequence with Watchdog Reset Enable Bit Set to ‘1’
Table 16. Watchdog Configuration
REGISTER
ADDRESS
73h 273h [4]
76h 276h
FLASH
ADDRESS
BIT
RANGE
[7]
[6:4]
[3:0]
1 = Independent mode
0 = Dependent mode
1 = Watchdog reset output enabled
0 = Watchdog reset output disabled
Watchdog Startup Delay
000 = No initial timeout
001 = 30s
010 = 40s
011 = 80s
100 = 120s
101 = 160s
110 = 220s
111 = 300s
Watchdog Timeout
0000 = Watchdog disabled
0001 = 1ms
0010 = 2ms
0011 = 4ms
0100 = 8ms
0101 = 14ms
0110 = 27ms
0111 = 50ms
1000 = 100ms
1001 = 200ms
1010 = 400ms
1011 = 750ms
1100 = 1.4s
1101 = 2.7s
1110 = 5s
1111 = 10s
DESCRIPTION
22 _____________________________________________________________________________________
Page 23

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
The watchdog can be configured to control the RESET
output as well as the WDO output. RESET asserts for
the reset timeout, tRP, when the watchdog timer expires
and the Watchdog Reset Output Enable bit (r76h[7]) is
set to ‘1’. When RESET is asserted, the watchdog timer
is cleared and WDO is deasserted, therefore, WDO
pulses low for a short time (approximately 1Fs) when
the watchdog timer expires. RESET is not affected by
the watchdog timer when the Watchdog Reset Output
Enable bit (r76h[7]) is set to ‘0’. If a RESET is asserted
by the watchdog timeout, the WDRESET bit is set to ‘1’. A
connected processor can check this bit to see the reset
was due to a watchdog timeout.
See Table 16 for more information on configuring watchdog functionality.
Independent Watchdog Timer Operation
When r73h[3] is ‘1,’ the watchdog timer operates in
the independent mode. In the independent mode, the
watchdog timer operates as if it were a separate device.
The watchdog timer is activated immediately upon VCC
exceeding UVLO and once the boot-up sequence is
finished. When RESET is asserted by EN being low, the
watchdog timer and WDO are not affected.
There is a startup delay if r76h[6:4] is set to a value different than ‘000’. If r76h[6:4] is set to ‘000’, there is not
a startup delay. See Table 16 for delay times.
In independent mode, if the Watchdog Reset Output
Enable bit r76h[7] is set to ‘1,’ when the watchdog timer
expires, WDO asserts then RESET asserts. WDO then
deasserts. WDO is low for approximately 1Fs. If the
Watchdog Reset Output Enable bit (r76h[7]) is set to
‘0,’ when the watchdog timer expires, WDO asserts but
RESET is not affected.
User-Defined Register
Register r8Ah provides storage space for a user-defined
configuration or firmware version number. Note that this
register controls the contents of the JTAG USERCODE
register bits 7-0. The user-defined register is stored at
r28Ah in the flash memory.
Memory Lock Bits
Register r8Ch contains the lock bits for the configuration
registers, configuration flash, user flash, and fault register lock. See Table 17 for details.
SMBus-Compatible Interface
The MAX16068 features an SMBus-compatible, 2-wire
serial interface consisting of a serial-data line (SDA)
and a serial-clock line (SCL). SDA and SCL facilitate
bidirectional communication between the MAX16068
and the master device at clock rates up to 400kHz.
Figure 1 shows the 2-wire interface timing diagram. The
MAX16068 is a transmit/receive, slave-only device, relying upon a master device to generate a clock signal.
The master device (typically a microcontroller) initiates
a data transfer on the bus and generates SCL to permit
that transfer.
MAX16068
Table 17. Memory Lock Bits
REGISTER
ADDRESS
8Ch 28Ch
FLASH
ADDRESS
______________________________________________________________________________________ 23
BIT RANGE DESCRIPTION
[0]
[1]
[2]
[3]
[7.4] Not used
Configuration Register Lock
1 = Locked
0 = Unlocked
Flash Fault Register Lock
1 = Locked
0 = Unlocked
Flash Configuration Lock
1 = Locked
0 = Unlocked
User Flash Lock
1 = Locked
0 = Unlocked
Page 24

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
A master device communicates to the MAX16068 by
transmitting the proper address followed by command
and/or data words. The slave address input, A0, is
capable of detecting four different states, allowing multiple identical devices to share the same serial bus. The
slave address is described further in the Slave Address
section. Each transmit sequence is framed by a START
(S) or REPEATED START (Sr) condition and a STOP (P)
condition. Each word transmitted over the bus is 8 bits
MAX16068
long and is always followed by an acknowledge pulse.
SCL is a logic input, while SDA is an open-drain input/
output. SCL and SDA both require external pullup resistors to generate the logic-high voltage. Use 4.7kI for
most applications.
Bit Transfer
Each clock pulse transfers one data bit. The data on
SDA must remain stable while SCL is high (Figure 6);
otherwise, the MAX16068 registers a START or STOP
condition (Figure 7) from the master. SDA and SCL idle
high when the bus is not busy.
START and STOP Conditions
Both SCL and SDA idle high when the bus is not busy.
A master device signals the beginning of a transmission
with a START condition by transitioning SDA from high to
low while SCL is high. The master device issues a STOP
condition by transitioning SDA from low to high while
SCL is high. A STOP condition frees the bus for another
transmission. The bus remains active if a REPEATED
START condition is generated, such as in the block read
protocol (see Figure 1, SMBus Timing Diagram).
Early STOP Conditions
The MAX16068 recognizes a STOP condition at any point
during transmission except if a STOP condition occurs in
the same high pulse as a START condition. This condition
is not a legal SMBus format; at least one clock pulse must
separate any START and STOP condition.
REPEATED START Conditions
A REPEATED START can be sent instead of a STOP
condition to maintain control of the bus during a read
operation. The START and REPEATED START conditions
are functionally identical.
SDA
SCL
DATA LINE STABLE,
DATA VALID
Figure 6. Bit Transfer Figure 7. START and STOP Conditions
CHANGE OF
DATA ALLOWED
SDA
SCL
START
CONDITION
PS
STOP
CONDITION
24 _____________________________________________________________________________________
Page 25

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Acknowledge
The acknowledge bit (ACK) is the 9th bit attached to
any 8-bit data word. The receiving device always generates an ACK. The MAX16068 generates an ACK when
receiving an address or data by pulling SDA low during
the 9th clock period (Figure 8). When transmitting data,
such as when the master device reads data back from
the MAX16068, the device waits for the master device to
generate an ACK. Monitoring ACK allows for detection
of unsuccessful data transfers. An unsuccessful data
transfer occurs if the receiving device is busy or if a system fault has occurred. In the event of an unsuccessful
data transfer, the bus master can reattempt communication at a later time. The MAX16068 generates a NACK
after the command byte received during a software
reboot, while writing to the flash, or when receiving an
illegal memory address.
Use the slave address input, A0, to allow multiple identical devices to share the same serial bus. Connect A0 to
GND, DBP (or an external supply voltage greater than
2V), SCL, or SDA to set the device address on the bus.
See Table 18 for a listing of all possible 7-bit addresses.
The slave address can also be set to a custom value by
loading the address into register r8Bh[6:0]. See Table
19. If r8Bh[6:0] is loaded with 00h, the address is set by
input A0. Do not set the address to 09h or 7Fh to avoid
address conflicts. The slave address setting takes effect
immediately after writing to the register.
CLOCK PULSE FOR ACKNOWLEDGE
Slave Address
MAX16068
SCL
SDA BY
TRANSMITTER
S
SDA BY
RECEIVER
Figure 8. Acknowledge
1
Table 18. Setting the SMBus Slave Address
SLAVE ADDRESSES
A0 SLAVE ADDRESS
0 1010 100R
1 1010 101R
SCL 1010 110R
SDA 1010 111R
R = Read/write select bit.
2
8 9
NACK
ACK
______________________________________________________________________________________ 25
Page 26

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Packet Error Checking (PEC)
The MAX16068 features a packet-error checking (PEC)
mode that is useful to improve the reliability of the communication bus by detecting bit errors. By enabling PEC,
an extra CRC-8 error check byte is added in the data
string during each read and/or write sequence. Enable
PEC by writing a ‘1’ to r8Bh[7].
The CRC-8 byte is calculated using the polynomial:
MAX16068
The PEC calculation includes all bytes in the transmission, including address, command and data. The PEC
calculation does not include ACK, NACK, START, STOP,
or REPEATED START.
The MAX16068 uses eight command codes for block
read, block write, and other commands. See Table 20
for a list of command codes.
To initiate a software reboot, send A7h using the send
byte format. A software-initiated reboot is functionally the same as a hardware-initiated power-on reset.
During boot-up, flash configuration data in the range
of 230h–28Ch is copied to r30h–r8Ch registers in the
default page.
C = X8 + X2 + X + 1
Command Codes
Send command code A8h to trigger a fault store to flash.
Configure the Critical Fault Log Control register (6Dh) to
store ADC conversion results and/or fault flags.
While in the flash page, send command code A9h to
access the flash page (addresses from 200h–2FFh).
Once command code A9h has been sent, all addresses
are recognized as flash addresses only. Send command
code AAh to return to the default page (addresses from
000h–0FFh). Send command code ABh to access the
user flash-page (addresses from 300h–3FFh), and send
command code ACh to return to the flash page.
Restrictions When Writing to Flash
Flash must be written to 8 bytes at a time. The initial
address must be aligned to 8-byte boundaries—the 3
LSBs of the initial address must be ‘000’. Write the 8
bytes using a single block write command or using eight
successive Write Byte commands. A write operation
requires 122ms for each 8-byte block. After programming a block, check r20h[1] (see Table 25) to make sure
the write operation is complete before attempting to write
the next block.
Table 19. SMBus Settings Register
REGISTER
ADDRESS
8Bh 28Bh
FLASH
ADDRESS
BIT RANGE DESCRIPTION
Table 20. Command Codes
COMMAND CODE ACTION
A5h Block write
A6h Block read
A7h Reboot flash in register file
A8h Trigger emergency save to flash
A9h Flash page access ON
AAh Flash page access OFF
ABh User flash access ON (must be in flash page already)
ACh User flash access OFF (return to flash page)
[6:0]
[7] 1 = Enable PEC (Packet Error Check).
SMBus Slave Address Register. Set to 00h to use A0 pin address
setting.
26 _____________________________________________________________________________________
Page 27

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Send Byte
The send byte protocol allows the master device to
send one byte of data to the slave device (see Figure
9). The send byte presets a register pointer address for
a subsequent read or write. The slave sends a NACK
instead of an ACK if the master tries to send a memory
address or command code that is not allowed. If the
master sends A5h or A6h, the data is ACK, because this
could be the start of the write block or read block. If the
master sends a STOP condition before the slave asserts
an ACK, the internal address pointer does not change.
If the master sends A7h, this signifies a software reboot.
The send byte procedure is as follows:
1) The master sends a START condition.
2) The master sends the 7-bit slave address and a write
bit (low).
3) The addressed slave asserts an ACK on SDA.
4) The master sends an 8-bit memory address or command code.
5) The addressed slave asserts an ACK (or NACK) on
SDA.
6) The master sends a STOP condition.
Receive Byte
The receive byte protocol allows the master device to
read the register content of the MAX16068 (see Figure
9). The flash or register address must be preset with a
send byte or write word protocol first. Once the read
is complete, the internal pointer increases by one.
Repeating the receive byte protocol reads the contents
of the next address. The receive byte procedure follows:
1) The master sends a START condition.
2) The master sends the 7-bit slave address and a read
bit (high).
3) The addressed slave asserts an ACK on SDA.
4) The slave sends 8 data bits.
5) The master asserts a NACK on SDA.
6) The master generates a STOP condition.
Write Byte
The write byte protocol (see Figure 9) allows the master device to write a single byte in the default page,
extended page, or flash page, depending on which
page is currently selected. The write byte procedure is
as follows:
1) The master sends a START condition.
2) The master sends the 7-bit slave address and a write
bit (low).
3) The addressed slave asserts an ACK on SDA.
4) The master sends an 8-bit memory address.
5) The addressed slave asserts an ACK on SDA.
6) The master sends an 8-bit data byte.
7) The addressed slave asserts an ACK on SDA.
8) The master sends a STOP condition.
To write a single byte, only the 8-bit memory address
and a single 8-bit data byte are sent. The data byte is
written to the addressed location if the memory address
is valid. The slave asserts a NACK at step 5 if the memory address is not valid.
When PEC is enabled, the Write Byte protocol becomes:
1) The master sends a START condition.
2) The master sends the 7-bit slave ID plus a write bit
(low).
3) The addressed slave asserts an ACK on the data
line.
4) The master sends an 8-bit command code.
5) The active slave asserts an ACK on the data line.
6) The master sends an 8-bit data byte.
7) The slave asserts an ACK on the data line.
8) The master sends an 8-bit PEC byte.
9) The slave asserts an ACK on the data line (if PEC is
good, otherwise NACK).
10) The master generates a STOP condition.
Read Byte
The read byte protocol (see Figure 9) allows the master
device to read a single byte located in the default page,
extended page, or flash page depending on which page is
currently selected. The read byte procedure is as follows:
1) The master sends a START condition.
2) The master sends the 7-bit slave address and a write
bit (low).
3) The addressed slave asserts an ACK on SDA.
4) The master sends an 8-bit memory address.
5) The addressed slave asserts an ACK on SDA.
6) The master sends a REPEATED START condition.
7) The master sends the 7-bit slave address and a read
bit (high).
8) The addressed slave asserts an ACK on SDA.
MAX16068
______________________________________________________________________________________ 27
Page 28

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
9) The slave sends an 8-bit data byte.
10) The master asserts a NACK on SDA.
11) The master sends a STOP condition.
If the memory address is not valid, it is NACKed by the
slave at step 5 and the address pointer is not modified.
When PEC is enabled, the Read Byte protocol becomes:
1) The master sends a START condition.
2) The master sends the 7-bit slave ID plus a write bit
MAX16068
(low).
3) The addressed slave asserts an ACK on the data
line.
4) The master sends 8 data bits.
5) The active slave asserts an ACK on the data line.
6) The master sends a REPEATED START condition.
7) The master sends the 7-bit slave ID plus a read bit
(high).
8) The addressed slave asserts an ACK on the data
line.
9) The slave sends 8 data bits.
10) The master asserts an ACK on the data line.
11) The slave sends an 8-bit PEC byte.
12) The master asserts a NACK on the data line.
13) The master generates a STOP condition.
Block Write
The block write protocol (see Figure 9) allows the master
device to write a block of data (1–16 bytes) to memory.
Preload the destination address by a previous send byte
command; otherwise the block write command begins to
write at the current address pointer. After the last byte
is written, the address pointer remains preset to the
next valid address. If the number of bytes to be written
causes the address pointer to exceed 8Fh for configuration registers or configuration flash or FFh for user flash,
the address pointer stays at 8Fh or FFh, respectively,
overwriting this memory address with the remaining
bytes of data. The slave generates a NACK at step 5 if
the command code is invalid or if the device is busy, and
the address pointer is not altered.
The block write procedure is as follows:
1) The master sends a START condition.
2) The master sends the 7-bit slave address and a
write bit (low).
3) The addressed slave asserts an ACK on SDA.
4) The master sends the 8-bit command code for block
write (94h).
5) The addressed slave asserts an ACK on SDA.
6) The master sends the 8-bit byte count (1 byte to 16
bytes), n.
7) The addressed slave asserts an ACK on SDA.
8) The master sends 8 bits of data.
9) The addressed slave asserts an ACK on SDA.
10) Repeat steps 8 and 9 n - 1 times.
11) The master sends a STOP condition.
When PEC is enabled, the Block Write protocol becomes:
1) The master sends a START condition.
2) The master sends the 7-bit slave ID plus a write bit
(low).
3) The addressed slave asserts an ACK on the data
line.
4) The master sends 8 bits of the block write command
code.
5) The slave asserts an ACK on the data line.
6) The master sends 8 bits byte count (min 1, max 16) n.
7) The slave asserts an ACK on the data line.
8) The master sends 8 bits of data.
9) The slave asserts an ACK on the data line.
10) Repeat 8 and 9 n - 1 times.
11) The master sends an 8-bit PEC byte.
12) The slave asserts an ACK on the data line (if PEC is
good, otherwise NACK).
13) The master generates a STOP condition.
Block Read
The block read protocol (see Figure 9) allows the master
device to read a block of up to 16 bytes from memory.
Read fewer than 16 bytes of data by issuing an early
STOP condition from the master, or by generating a
NACK with the master. The destination address should
be preloaded by a previous send byte command;
otherwise, the block read command begins to read at
the current address pointer. If the number of bytes to
be read causes the address pointer to exceed 8Fh for
the configuration register or configuration flash or FFh
in user flash, the address pointer stays at 8Fh or FFh,
respectively.
28 _____________________________________________________________________________________
Page 29

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
SEND BYTE FORMAT
ADDRESS
S
SLAVE ADDRESS: Address
of the slave on the serial
interface bus.
WRITE BYTE FORMAT
S
SLAVE ADDRESS: Address
of the slave on the serial
interface bus.
READ BYTE FORMAT
S
SLAVE ADDRESS: Address
of the slave on the serial
interface bus.
BLOCK WRITE FORMAT
S
SLAVE ADDRESS: Address
of the slave on the
serial interface bus.
BLOCK READ FORMAT
S
SLAVE ADDRESS: Address
of the slave on the
serial interface bus.
WRITE BYTE FORMAT WITH PEC
S ADDRESS COMMAND PEC P
R/W ACK COMMAND ACK P
7 BITS 0 00 8 BITS
DATA BYTE: Presets the internal
address pointer or represents
a command.
ADDRESS
R/W ACK COMMAND ACK
7 BITS 0 0 0
SLAVE
R/W
ADDRESS
7 BITS 0 0 0 0 18 BITS
R/W
ADDRESS
7 BITS 0
R/W R/W
ADDRESS
7 BITS
R/W
7 BITS
8 BITS
COMMAND BYTE:
Sets the internal
address pointer.
ACK COMMAND ACK
COMMAND BYTE:
Sets the internal
address pointer.
ACK COMMAND ACK
0
COMMAND BYTE:
FAh
ACK COMMAND ACK
COMMAND BYTE:
FBh
ACK ACK ACK ACK
8 BITS
00 8 BITS 0
0
0
0
DATA ACK P
8 BITS
DATA BYTE: Data is written to
the locations set by the
internal address pointer.
SLAVE
SR
ADDRESS
7 BITS 1
BYTE
COUNT = N
8 BITS
ADDRESS
SR ACK
7 BITS0 0
SLAVE ADDRESS: Address
of the slave on the
serial interface bus.
DATA
8 BITS
RECEIVE BYTE FORMAT
ADDRESS
S
SLAVE ADDRESS: Address
of the slave on the serial
interface bus.
0
R/W
ACK DATA BYTE
DATA BYTE: Data is written to
the locations set by the
internal address pointer.
ACK P
DATA BYTE 1 ACK
8 BITS
0 0
DATA BYTE: Data is written to the locations
set by the internal address pointer.
0 0 0
1
0
R/W ACK DATA NACK P
7 BITS 1 0
DATA BYTE: Data is read from
the location pointed to by the
internal address pointer.
SMBALERT#
S ADDRESS R/W ACK DATA NACK P
0001100 D.C. 8 BITS
ALERT RESPONSE ADDRESS:
Only the device that
interrupted the master
responds to this address.
NACK P
8 BITS
DATA BYTE … ACK
0 08 BITS
8 BITS
BYTE
ACK P
COUNT = N
8 BITS
DATA BYTE: Data is read from the locations
set by the internal address pointer.
DATA BYTE N ACK
8 BITS
18 BITS
0 1
SLAVE ADDRESS: Slave places
its own address on the
serial bus.
DATA BYTE N ACK
8 BITS
DATA BYTE … NACK
8 BITS
ACK DATA BYTE N
0
8 BITS
SLAVE TO MASTER
MASTER TO SLAVE
18 BITS
MAX16068
READ BYTE FORMAT WITH PEC
S
ADDRESS COMMAND DATA PEC P
7 BITS
BLOCK WRITE WITH PEC
ADDRESS
S
7 BITS
BLOCK READ WITH PEC
ADDRESS
S
7 BITS
S = START CONDITION
P = STOP CONDITION
Sr = REPEATED START CONDITION
D.C. = DON’T CARE
ACK ACK ACK ACK NACK
R/W R/W
0
0
ACK ACK ACK ACK ACK ACK
R/W
0
0
ACK ACK ACK ACK ACK ACK ACK
R/W R/W
0
0
Figure 9. SMBus Protocols
______________________________________________________________________________________ 29
SRSRADDRESS
8 BITS
8 BITS
COMMAND
8 BITS
COMMAND
8 BITS
0
0
ACK = ACKNOWLEDGE, SDA PULLED LOW DURING RISING EDGE OF SCL.
NACK = NOT ACKNOWLEDGE, SDA LEFT HIGH DURING RISING EDGE OF SCL.
ALL DATA IS CLOCKED IN/OUT OF THE DEVICE ON RISING EDGES OF SCL.
7 BITS
BYTE COUNT N
8 BITS
ADDRESS
7 BITS
0
1 1
DATA BYTE 1
0
1
8 BITS
00
0
BYTE COUNT N
8 BITS
0
DATA BYTE
8 BITS
0
8 BITS
DATA N
8 BITS
0 0 0
DATA BYTE 1
8 BITS
DATA BYTE
0
8 BITS
= SDA TRANSITIONS FROM HIGH TO LOW DURING PERIOD OF SCL.
= SDA TRANSITIONS FROM LOW TO HIGH DURING PERIOD OF SCL.
ACK
PEC
8 BITS
DATA N
0 0
8 BITS
P
PEC
NACK1P
8 BITS
Page 30

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
The block read procedure is the following:
1) The master sends a START condition.
2) The master sends the 7-bit slave address and a
write bit (low).
3) The addressed slave asserts an ACK on SDA.
4) The master sends 8 bits of the block read command
(95h).
5) The slave asserts an ACK on SDA, unless busy.
MAX16068
6) The master generates a REPEATED START condition.
REGISTERS
AND EEPROM
MEMORY WRITE REGISTER
[LENGTH = 8 BITS]
MEMORY READ REGISTER
[LENGTH = 8 BITS]
MEMORY ADDRESS REGISTER
[LENGTH = 8 BITS]
USER CODE REGISTER
[LENGTH = 32 BITS]
IDENTIFICATION REGISTER
[LENGTH = 32 BITS]
BYPASS REGISTER
[LENGTH = 1 BIT]
7) The master sends the 7-bit slave address and a
read bit (high).
8) The slave asserts an ACK on SDA.
9) The slave sends the 8-bit byte count (16).
10) The master asserts an ACK on SDA.
11) The slave sends 8 bits of data.
12) The master asserts an ACK on SDA.
13) Repeat steps 11 and 12 up to fifteen times.
14) The master asserts a NACK on SDA.
15) The master sends a STOP condition.
01100
01011
01010
01001
01000
00111
00110
MUX 1
00101
COMMAND
00100
00011
00000
11111
DECODER
01100
01011
01010
01001
01000
00111
SETFLSHADD
RSTFLSHADD
RSTUSRFLSH
SETUSRFLSH
SAVE
REBOOT
V
DB
INSTRUCTION REGISTER
[LENGTH = 5 BITS]
R
TDI
TMS
TCK
PU
TEST ACCESS PORT
(TAP) CONTROLLER
MUX 2
Figure 10. JTAG Block Diagram
30 _____________________________________________________________________________________
TDO
Page 31

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
When PEC is enabled, the Block Read protocol becomes:
1) The master sends a START condition.
2) The master sends the 7-bit slave ID plus a write bit
(low).
3) The addressed slave asserts an ACK on the data
line.
4 The master sends 8 bits of the block read command
code.
5) The slave asserts an ACK on the data line unless
busy.
6) The master sends a REPEATED START condition.
7) The master sends the 7-bit slave ID plus a read bit
(high).
8) The slave asserts an ACK on the data line.
9) The slave sends 8-bit byte count (16).
10) The master asserts an ACK on the data line.
11) The slave sends 8 bits of data.
12) The master asserts an ACK on the data line.
13) Repeat 11 and 12 up to 15 times.
14) The slave sends an 8-bit PEC byte.
15) The master asserts a NACK on the data line.
16) The master generates a STOP condition.
SMBALERT (ALERT)
The MAX16068 supports the SMBus alert protocol. To
enable the SMBus alert output, set r40h[4] to ‘1’, then
configure GPIO1 to act as the SMBus alert (ALERT)
according to Table 12. This output is open drain and
uses the wired-OR configuration with other devices
on the SMBus. During a fault, the MAX16068 asserts
ALERT low, signaling the master that an interrupt has
occurred. The master responds by sending the ARA
(Alert Response Address) protocol on the SMBus. This
protocol is a read byte with 09h as the slave address.
The slave acknowledges the ARA (09h) address and
sends its own SMBus address to the master. The slave
then deasserts ALERT. The master can then query the
slave and determine the cause of the fault. By checking
r1C[7], the master can confirm that the MAX16068 triggered the SMBus alert. The master must send the ARA
before clearing r1Ch[7]. Clear r1Ch[7] by writing a ‘1’. If
GPIO1 is configured as the SMBus alert output but the
SMBus alert feature is disabled (r40h[4] is set to ‘0’),
GPIO1 acts as an additional fault output.
The MAX16068 features a JTAG port that complies with
a subset of the IEEE 1149.1 specification. Either the
SMBus or the JTAG interface can be used to access
internal memory; however, only one interface is allowed
to run at a time. The MAX16068 contains extra JTAG
instructions and registers not included in the JTAG
specification that provide access to internal memory.
The extra instructions include LOAD ADDRESS, WRITE,
READ, REBOOT, and SAVE.
The TAP controller is a finite state machine that responds
to the logic level at TMS on the rising edge of TCK. See
Figure 11 for a diagram of the finite state machine. The
possible states are described as follows:
Test-Logic-Reset: At power-up, the TAP controller
is in the test-logic-reset state. The instruction register
contains the IDCODE instruction. All system logic of the
device operates normally. This state can be reached
from any state by driving TMS high for five clock cycles.
Run-Test/Idle: The run-test/idle state is used between
scan operations or during specific tests. The instruction
register and test data registers remain idle.
Select-DR-Scan: All test data registers retain their previous state. With TMS low, a rising edge of TCK moves the
controller into the capture-DR state and initiates a scan
sequence. TMS high during a rising edge on TCK moves
the controller to the select-IR-scan state.
Capture-DR: Data can be parallel-loaded into the test
data registers selected by the current instruction. If the
instruction does not call for a parallel load or the selected
test data register does not allow parallel loads, the test
data register remains at its current value. On the rising
edge of TCK, the controller goes to the shift-DR state if
TMS is low or it goes to the exit1-DR state if TMS is high.
Shift-DR: The test data register selected by the current
instruction connects between TDI and TDO and shifts
data one stage toward its serial output on each rising
edge of TCK while TMS is low. On the rising edge of TCK,
the controller goes to the exit1-DR state if TMS is high.
Exit1-DR: While in this state, a rising edge on TCK puts the
controller in the update-DR state. A rising edge on TCK with
TMS low puts the controller in the pause-DR state.
JTAG Serial Interface
Test Access Port (TAP)
Controller State Machine
MAX16068
______________________________________________________________________________________ 31
Page 32

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
TEST-LOGIC-RESET
1
0
RUN-TEST/IDLE
0
MAX16068
1
SELECT-DR-SCAN SELECT-IR-SCAN
1
CAPTURE-DR
SHIFT-DR SHIFT-IR
EXIT1-DR EXIT1-IR
PAUSE-DR PAUSE-IR
0
EXIT2-DR EXIT2-IR
UPDATE-DR
1
1 1
0
1
0
0
1
1
0
0
1
0
1
0
CAPTURE-IR
UPDATE-IR
1
0
0
0
1
1
0
0
1
1
0
Figure 11. Tap Controller State Diagram
Pause-DR: Shifting of the test data registers halts while
in this state. All test data registers retain their previous
state. The controller remains in this state while TMS is
low. A rising edge on TCK with TMS high puts the controller in the exit2-DR state.
Exit2-DR: A rising edge on TCK with TMS high while in
this state puts the controller in the update-DR state. A rising edge on TCK with TMS low enters the shift-DR state.
Update-DR: A falling edge on TCK while in the updateDR state latches the data from the shift register path of
the test data registers into a set of output latches. This
prevents changes at the parallel output because of
changes in the shift register. On the rising edge of TCK,
the controller goes to the run-test/idle state if TMS is low
or goes to the select-DR-scan state if TMS is high.
Select-IR-Scan: All test data registers retain the previous states. The instruction register remains unchanged
during this state. With TMS low, a rising edge on TCK
32 _____________________________________________________________________________________
moves the controller into the capture-IR state. TMS high
during a rising edge on TCK puts the controller back into
the test-logic-reset state.
Capture-IR: Use the capture-IR state to load the shift
register in the instruction register with a fixed value.
This value is loaded on the rising edge of TCK. If TMS is
high on the rising edge of TCK, the controller enters the
exit1-IR state. If TMS is low on the rising edge of TCK,
the controller enters the shift-IR state.
Shift-IR: In this state, the shift register in the instruction
register connects between TDI and TDO and shifts data
one stage for every rising edge of TCK toward the TDO
serial output while TMS is low. The parallel outputs of
the instruction register as well as all test data registers
remain at the previous states. A rising edge on TCK with
TMS high moves the controller to the exit1-IR state. A
rising edge on TCK with TMS low keeps the controller in
the shift-IR state while moving data one stage through
the instruction shift register.
Page 33

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Exit1-IR: A rising edge on TCK with TMS low puts the
controller in the pause-IR state. If TMS is high on the rising edge of TCK, the controller enters the update-IR state.
Pause-IR: Shifting of the instruction shift register halts
temporarily. With TMS high, a rising edge on TCK puts
the controller in the exit2-IR state. The controller remains
in the pause-IR state if TMS is low during a rising edge
on TCK.
Exit2-IR: A rising edge on TCK with TMS high puts the
controller in the update-IR state. The controller loops
back to shift-IR if TMS is low during a rising edge of TCK
in this state.
Update-IR: The instruction code that has been shifted
into the instruction shift register latches to the parallel
outputs of the instruction register on the falling edge of
TCK as the controller enters this state. Once latched,
this instruction becomes the current instruction. A rising
edge on TCK with TMS low puts the controller in the runtest/idle state. With TMS high, the controller enters the
select-DR-scan state.
Instruction Register
The instruction register contains a shift register as well
as a latched 5-bit wide parallel output. When the TAP
controller enters the shift-IR state, the instruction shift
register connects between TDI and TDO. While in the
shift-IR state, a rising edge on TCK with TMS low shifts
the data one stage toward the serial output at TDO. A
rising edge on TCK in the exit1-IR state or the exit2-IR
state with TMS high moves the controller to the updateIR state. The falling edge of that same TCK latches the
data in the instruction shift register to the instruction
register parallel output. Table 21 shows the instructions
supported by the MAX16068 and the respective operational binary codes.
BYPASS: When the BYPASS instruction is latched into
the instruction register, TDI connects to TDO through the
1-bit bypass test data register. This allows data to pass
from TDI to TDO without affecting the device’s operation.
IDCODE: When the IDCODE instruction is latched into
the parallel instruction register, the identification data
register is selected. The device identification code is
loaded into the identification data register on the rising
edge of TCK following entry into the capture-DR state.
Shift-DR can be used to shift the identification code
out serially through TDO. During test-logic-reset, the
IDCODE instruction is forced into the instruction register.
The identification code always has a ‘1’ in the LSB position. The next 11 bits identify the manufacturer’s JEDEC
number and number of continuation bytes followed by
16 bits for the device and 4 bits for the version. See
Table 22.
MAX16068
Table 21. JTAG Instruction Set
INSTRUCTION CODE NOTES
BYPASS 0x1F Mandatory instruction code
IDCODE 0x00 Load manufacturer ID code/part number
USERCODE 0x03 Load user code
LOAD ADDRESS 0x04 Load address register content
READ DATA 0x05 Read data pointed by current address
WRITE DATA 0x06 Write data pointed by current address
REBOOT 0x07 Reboot FLASH data content into register file
SAVE 0x08 Trigger emergency save to flash
SETFLSHADD 0x09 Flash page access ON
RSTFLSHADD 0x0A Flash page access OFF
SETUSRFLSH 0x0B User flash access ON (must be in flash page already)
RSTUSRFLSH 0x0C User flash access OFF (return to flash page)
Table 22. 32-Bit Identification Code
MSB LSB
VERSION (4 BITS) PART NUMBER (16 BITS) MANUFACTURER (11 BITS) FIXED VALUE (1 BIT)
0001 1000000000000010 00011001011 1
______________________________________________________________________________________ 33
Page 34

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
USERCODE: When the USERCODE instruction latches
into the parallel instruction register, the user-code data
register is selected. The device user-code loads into the
user-code data register on the rising edge of TCK following entry into the capture-DR state. Shift-DR can be
used to shift the user-code out serially through TDO. See
Table 24. This instruction can be used to help identify
multiple MAX16068 devices connected in a JTAG chain.
LOAD ADDRESS: This is an extension to the standard
MAX16068
IEEE 1149.1 instruction set to support access to the
memory in the MAX16068. When the LOAD ADDRESS
instruction latches into the instruction register, TDI connects to TDO through the 8-bit memory address test
data register during the shift-DR state.
READ DATA: This is an extension to the standard
IEEE 1149.1 instruction set to support access to the
memory in the MAX16068. When the READ instruction
latches into the instruction register, TDI connects to TDO
through the 8-bit memory read test data register during
the shift-DR state.
WRITE DATA: This is an extension to the standard
IEEE 1149.1 instruction set to support access to the
memory in the MAX16068. When the WRITE instruction
latches into the instruction register, TDI connects to TDO
through the 8-bit memory write test data register during
the shift-DR state.
REBOOT: This is an extension to the standard IEEE
1149.1 instruction set to initiate a software-controlled
reset to the MAX16068. When the REBOOT instruction latches into the instruction register, the MAX16068
resets and immediately begins the boot-up sequence.
SAVE: This is an extension to the standard IEEE 1149.1
instruction set that triggers a fault log. The current ADC
conversion results along with fault information are saved
to flash depending on the configuration of the Critical
Fault Log Control register (r6Dh).
SETFLSHADD: This is an extension to the standard
IEEE 1149.1 instruction set that allows access to the
flash page. Flash registers include ADC conversion
results, DACOUT enables, and GPIO input/output data.
Use this page to access registers 200h–2FFh.
RSTFLSHADD: This is an extension to the standard
IEEE 1149.1 instruction set. Use RSTFLSHADD to return
to the default page and disable access to the flash page.
SETUSRFLSH: This is an extension to the standard
IEEE 1149.1 instruction set that allows access to the user
flash page. When on the configuration flash page, send
the SETUSRFLSH command, all addresses are recognized as flash addresses only. Use this page to access
registers 300h–3FFh.
RSTUSRFLSH: This is an extension to the standard
IEEE 1149.1 instruction set. Use RSTUSRFLSH to return
to the configuration flash page and disable access to
the user flash.
Restrictions When Writing to Flash
Flash must be written to 8 bytes at a time. The initial
address must be aligned to 8-byte boundaries—the 3
LSBs of the initial address must be ‘000’. Write the 8
bytes using eight successive Write Data commands. A
write operation requires 122ms for each 8-byte block.
After programming a block, check r20h[1] (see Table
25) to make sure the write operation is complete before
attempting to write the next block.
Table 23. 32-Bit User-Code Data
MSB LSB
DON’T CARE SMBUS SLAVE ID USER ID (r8A[7:0])
00000000000000000 See Table 18
Table 24. Maximum Write Time
r6Dh[1:0] VALUE DESCRIPTION MAXIMUM WRITE TIME (ms)
00 Save flags and ADC readings 153
01 Save flags 102
10 Save ADC readings 153
11 Do not save anything —
34 _____________________________________________________________________________________
Page 35

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Table 25. RESET State, Flash State, and Reset Reason
REGISTER ADDRESS BIT RANGE DESCRIPTION
Reset output state
r20h
[0]
[1] 1 = Flash memory is busy
[2] 1 = Last reset asserted due to EN going low
[3] 1 = Last reset asserted due to watchdog timeout
[7:4] Not used
0 = RESET is low
1 = RESET is high
MAX16068
Applications Information
Device Behavior at Power-Up
When VCC is ramped from 0V, the RESET output is
high impedance until VCC reaches 1.4V, at which point
RESET goes low. All other outputs are high impedance
until VCC reaches 2.7V, then the flash contents are copied into register memory. This takes 150Fs (max) after
which the outputs assume their programmed states.
Programming the MAX16068 in Circuit
The MAX16068 can be programmed in the application
circuit by taking into account the following points during
circuit design:
U The MAX16068 needs to be powered from an inter-
mediate voltage bus or an auxiliary voltage supply so
programming can occur even when the board’s power
supplies are off. This could also be achieved by using
ORing diodes so that power can be provided through
the programming connector.
U The SMBus or JTAG bus lines should not connect
through a bus multiplexer powered from a voltage rail
controlled by the MAX16068. If the device needs to be
controlled by an on-board FP, consider connecting the
FP to one bus (such as SMBus) and use the other bus
for in-circuit programming.
circuit. Table 25 shows that the amount of time required
depends on the settings in the fault control register
(r6Dh[1:0]).
Maintain power for shutdown during fault conditions in
applications where the always-on power supply cannot
be relied upon by placing a diode and a large capacitor
between the voltage source, VIN, and VCC (Figure 12).
The capacitor value depends on VIN and the time delay
required, t
FAULT_SAVE
. Use the following formula to cal-
culate the capacitor size:
C = (t
FAULT_SAVE
where the capacitance is in Farads and t
seconds, I
CC(MAX)
across the diode, and V
a VIN of 14V, a diode drop of 0.7V, and a t
x I
CC(MAX)
is 14mA, V
UVLO
)/(VIN - V
is the voltage drop
DIODE
- V
DIODE
FAULT_SAVE
UVLO
)
is in
is 2.7V. For example, with
FAULT_SAVE
of 153ns, the minimum required capacitance is 202FF.
V
IN
V
CC
C
MAX16068
Maintaining Power During
a Fault Condition
Power to the MAX16068 must be maintained for a specific period of time to ensure a successful flash fault
log operation during a fault that removes power to the
______________________________________________________________________________________ 35
GND
Figure 12. Power Circuit for Shutdown During Fault Conditions
Page 36

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Configuring the Device
An evaluation kit and a graphical user interface (GUI) are
available to create a custom configuration for the device
(Figure 13).
Refer to the MAX16068 Evaluation Kit for configuration.
Cascading Multiple MAX16068s
Multiple MAX16068s can be cascaded to monitor more
power supplies. There are many ways to cascade the
MAX16068
devices depending on the desired behavior. In general,
there are several techniques as follows:
U Configure a GPIO on each device to be EXTFAULT
(open drain). Externally wire them together with a single pullup resistor. Set register bits r72h[5] and r6Dh[2]
to ‘1’ so that all faults propagate between devices. If a
critical fault occurs on one device, EXTFAULT asserts,
triggering the nonvolatile fault logger in all cascaded
devices and recording a snapshot of all system voltages.
U Connect open-drain RESET outputs together to obtain
a master system reset signal.
U Connect all EN inputs together for a master enable
signal.
Layout and Bypassing
Bypass DBP and ABP each with a 1FF ceramic capacitor
to GND. Bypass VCC with a 10FF capacitor to ground.
Avoid routing digital return currents through a sensitive
analog area, such as an analog supply input return path
or ABP’s bypass capacitor ground connection. Use
dedicated analog and digital ground planes. Connect
the capacitors as close as possible to the device.
Figure 13. Graphical User Interface Screenshot
36 _____________________________________________________________________________________
Page 37

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Register Map
MAX16068
FLASH
ADDRESS
ADC VALUES, FAULT REGISTERS, GPIO_s AS INPUT PORTS—NOT IN FLASH
— 000 R MON1 ADC output, MSBs
— 001 R MON1 ADC output, LSBs
— 002 R MON2 ADC output, MSBs
— 003 R MON2 ADC output, LSBs
— 004 R MON3 ADC output, MSBs
— 005 R MON3 ADC output, LSBs
— 006 R MON4 ADC output, MSBs
— 007 R MON4 ADC output, LSBs
— 008 R MON5 ADC output, MSBs
— 009 R MON5 ADC output, LSBs
— 00A R MON6 ADC output, MSBs
— 00B R MON6 ADC output, LSBs
— 00C–01A — Reserved
— 01B R/W Fault register—failed line flags
— 01C R/W Fault register—failed line flags
— 01D — Reserved
— 01E R GPIO_ data in (read only)
— 01F — Reserved
— 020 R/W Flash status/reset output monitor
— 021 — Reserved
GPIO_ AND OUTPUT DEPENDENCIES/CONFIGURATIONS
230 030 — Reserved
231 031 — Reserved
232 032 — Reserved
233 033 — Reserved
234 034 — Reserved
235 035 — Reserved
236 036 R/W
237 037 R/W
238–23A 038–03A — Reserved
23B 03B R/W RESET output configuration
23C 03C R/W RESET output dependencies
23D 03D R/W RESET output dependencies
23E 03E R/W GPIO data out
23F 03F R/W GPIO configuration
240 040 R/W GPIO configuration, ARANEN (ARA Enable)
241–242 041–042 — Reserved
REGISTER
ADDRESS
READ/
WRITE
DESCRIPTION
FAULT dependencies
FAULT dependencies
______________________________________________________________________________________ 37
Page 38

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Register Map (continued)
FLASH
ADDRESS
ADC—CONVERSIONS
243 043 R/W ADCs voltage ranges for MON_ monitoring
244 044 R/W ADCs voltage ranges for MON_ monitoring
245–247 045–047 — Reserved
INPUT THRESHOLDS
MAX16068
248 048 — Reserved
249 049 R/W MON1 OV threshold
24A 04A R/W MON1 UV threshold
24B 04B — Reserved
24C 04C R/W MON2 OV threshold
24D 04D R/W MON2 UV threshold
24E 04E — Reserved
24F 04F R/W MON3 OV threshold
250 050 R/W MON3 UV threshold
251 051 — Reserved
252 052 R/W MON4 OV threshold
253 053 R/W MON4 UV threshold
254 054 — Reserved
255 055 R/W MON5 OV threshold
256 056 R/W MON5 UV threshold
257 057 — Reserved
258 058 R/W MON6 OV threshold
259 059 R/W MON6 UV threshold
25A–26C 05A–06C — Reserved
FAULT SETUP
26D 06D R/W
26E 06E R/W Faults causing store in flash
26F 06F R/W Faults causing store in flash
270 070 R/W Faults causing store in flash
271 071 — Reserved
272 072 R/W
REGISTER
ADDRESS
READ/
WRITE
DESCRIPTION
Save after EXTFAULT fault control
EXTFAULT enable
38 _____________________________________________________________________________________
Page 39

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Register Map (continued)
MAX16068
FLASH
ADDRESS
TIMEOUTS
273 073 R/W
274 074 R/W ADC fault deglitch/autoretry configuration
275 075 R/W WDI toggle/fault timeout, reverse sequencing bit
276 076 R/W WDRESET, WD timers
277 077 R/W Boot-up delay
278 078 — Reserved
279 079 — Reserved
27A 07A — Reserved
27B 07B — Reserved
27C 07C — Reserved
27D 07D — Reserved
MISCELLANEOUS
27E 07E — Reserved
27F 07F — Reserved
280 080 — Reserved
281–283 081–083 — Reserved
284 084 — Reserved
285 085 — Reserved
286 086 — Reserved
287–289 087–089 — Reserved
28A 08A R/W Customer use (version)
28B 08B R/W PEC enable/SMBus address
28C 08C R/W Lock bits
28D 08D R Revision code
REGISTER
ADDRESS
READ/
WRITE
DESCRIPTION
Watchdog independent mode, MARGIN enabled, soft RESET functionality
______________________________________________________________________________________ 39
Page 40

6-Channel, Flash-Configurable System Manager
with Nonvolatile Fault Registers
Typical Operating Circuit
+48V IN
IN
OUT
DC-DC
EN
MAX16068
LATCH
CIRCUIT
OUTIN
DC-DC
MON1 MON2
V
CC
EN
Chip Information
PROCESS: BiCMOS
DC-DC
OUTIN
MAX16068
DBPABP
DC-DC
AOGND
OUTIN
MON3–
MON6
FAULT
RESET
SCL
SDA
3.3V
Package Information
For the latest package outline information and land patterns, go to www.maxim-ic.com/packages. Note that
a “+”, “#”, or “-” in the package code indicates RoHS
status only. Package drawings may show a different suffix character, but the drawing pertains to the package
regardless of RoHS status.
PACKAGE TYPE PACKAGE CODE DOCUMENT NO.
28 TQFN-EP T2855+6
21-0140
Maxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit patent licenses are implied.
Maxim reserves the right to change the circuitry and specifications without notice at any time.
40 Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 408-737-7600
©
2009 Maxim Integrated Products Maxim is a registered trademark of Maxim Integrated Products, Inc.
 Loading...
Loading...