

Page 1
General Description
The MAX15034 two-phase, configurable single- or dualoutput buck controller has an input voltage range of
4.75V to 5.5V or 5V to 28V. A mode select input allows
for a dual-output supply or connecting two phases
together for a single-output, high-current supply. Each
output channel of the MAX15034 drives n-channel
MOSFETs and is capable of providing more than 25A of
load current. The MAX15034 uses average currentmode control with a switching frequency up to 1MHz
per phase where each phase is 180° out of phase with
respect to the other. Out-of-phase operation results in
significantly reduced input capacitor ripple current and
output voltage ripple in dual-phase, single-output voltage applications. Each controller has its own high-performance current and voltage-error amplifier that can
be compensated for optimum output filter L-C values
and transient response.
The MAX15034 offers two enable inputs with accurate
turn-on thresholds to allow for output voltage sequencing
of the two outputs. The device’s switching frequency can
be programmed from 100kHz to 1MHz with an external
resistor. The MAX15034 can be synchronized to an
external clock. Each output voltage is adjustable from
0.61V to 5.5V. Additional features include thermal shutdown and hiccup-mode, short-circuit protection. Use the
MAX15034 with adaptive voltage positioning for applications that require a fast transient response or accurate
output voltage regulation.
The MAX15034 is available in a thermally enhanced 28pin TSSOP package capable of dissipating 2.1W. The
device is rated for operation over the -40°C to +125°C
automotive temperature range.
Applications
High-End Computers/Workstations/Servers
Graphics Cards
Networking Systems
Point-of-Load High-Current/High-Density
Telecom DC-DC Regulators
RAID Systems
Features
o 4.75V to 5.5V or 5V to 28V Input
o Dual-Output Synchronous Buck Controller
o Configurable for Two Separate Outputs (25A) or
One Single Output (50A)
o Average Current-Mode Control with Accurate
Adjustable Current Limit
o 180° Interleaved Operation Reduces Size of Input
Filter Capacitors
o Limits Reverse Current Sinking When Operated in
Parallel Mode
o Each Output is Adjustable from 0.61V to 5.5V
o Independently Programmable Adaptive Voltage
Positioning
o Monotonic Startup into Prebiased Outputs
o Independent Shutdown for Each Output
o 100kHz to 1MHz per Phase Programmable
Switching Frequency
o Oscillator Frequency Synchronization from
200kHz to 2MHz
o Digital Soft-Start on Outputs
o Hiccup-Mode Overcurrent Protection
o Overtemperature Shutdown
o Thermally Enhanced 28-Pin TSSOP Package
Capable of Dissipating 2.1W
MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
________________________________________________________________
Maxim Integrated Products
1
Ordering Information
19-4218; Rev 0; 7/08
For pricing, delivery, and ordering information, please contact Maxim Direct at 1-888-629-4642,
or visit Maxim’s website at www.maxim-ic.com.
+
Denotes a lead-free/RoHS-compliant package.
*
EP = Exposed pad.
PART TEMP RANGE PIN-PACKAGE
MAX15034AAUI+ -40°C to +125°C 28 TSSOP
MAX15034BAUI+ -40°C to +125°C 28 TSSOP-EP*
Page 2
MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
2 _______________________________________________________________________________________
ABSOLUTE MAXIMUM RATINGS
Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional
operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to
absolute maximum rating conditions for extended periods may affect device reliability.
IN, LX_ to AGND.....................................................-0.3V to +30V
BST_ to AGND........................................................-0.3V to +35V
DH_ to LX_ ....................................-0.3V to (V
BST_
- V
LX_
) + 0.3V
DL_ to PGND..............................................-0.3V to (V
DD
+ 0.3V)
BST_ to LX_ ..............................................................-0.3V to +6V
V
DD
to PGND............................................................-0.3V to +6V
AGND to PGND .....................................................-0.3V to +0.3V
AVGLIMIT, REG, RT/CLKIN, CSP_,
CSN_ to AGND ......................................................-0.3V to +6V
All Other Pins to AGND ............................-0.3V to (V
REG
+ 0.3V)
REG Continuous Output Current
(limited by power dissipation, no thermal or short-circuit
protection).........................................................................67mA
Continuous Power Dissipation (T
A
= +70°C) (Note 1)
28-Pin TSSOP (derate 14mW/°C above +70°C) ..........1117mW
28-Pin TSSOP-EP (derate 27mW/°C above +70°C) ........2162mW
Package Thermal Resistance (θ
JA
) (Note 1)
MAX15034A ................................................................71.6°C/W
MAX15034B ...................................................................37°C/W
Package Thermal Resistance (θ
JC
) (Note 1)
MAX15034A ...................................................................13°C/W
MAX15034B .....................................................................2°C/W
Operating Temperature Range .........................-40°C to +125°C
Maximum Junction Temperature .....................................+150°C
Storage Temperature Range .............................-60°C to +150°C
Lead Temperature (soldering, 10s) .................................+300°C
ELECTRICAL CHARACTERISTICS
(VIN= V
REG
= VDD= V
EN_
= +5V, TA= TJ= T
MIN
to T
MAX
, unless otherwise noted, circuit of Figure 6. Typical values are at TA= +25°C.)
(Note 2)
Note 1: Package thermal resistances were obtained using the method described in JEDEC specification JESD51-7, using a four-
layer board. For detailed information on package thermal considerations, refer to www.maxim-ic.com/thermal-tutorial
.
SYSTEM SPECIFICATIONS
Input Voltage Range V
Quiescent Supply Current I
STARTUP/INTERNAL REGULATOR OUTPUT (REG)
REG Undervoltage Lockout UVLO V
Hysteresis V
REG Output Accuracy VIN = 5.8V to 28V, I
REG Dropout VIN < 5.8V, I
INTERNAL REFERENCE
Internal Reference Voltage V
Digital Ramp Period for Soft-Start 1024
Soft-Start Voltage Steps 64 Steps
MOSFET DRIVERS
p-Channel Output Driver
Impedance
n-Channel Output Driver
Impedance
Output Driver Source Current I
Output Driver Sink Current I
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
R
R
DH_
DH_
IN
IN
HYST
EAN_
ON_P
ON_N
, I
DL_
, I
DL_
IN and REG shorted together for +5V
operation
f
= 500kHz, DH_ or DL_ = open 7 17 mA
OSC
rising 4.0 4.15 4.5 V
REG
SOURCE
= 60mA 0.5 V
SOURCE
EAN_ connected to
EAOUT_
(Note 3)
T
= 0 to 65mA 4.75 5.10 5.30 V
= -40°C to +125°C 0.605 0.6125 0.620 V
A
528
4.75 5.50
200 mV
1.35 3 Ω
0.45 1.35 Ω
2.5 A
5A
V
Clock
cycles
Page 3
MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
_______________________________________________________________________________________ 3
ELECTRICAL CHARACTERISTICS (continued)
(VIN= V
REG
= VDD= V
EN_
= +5V, TA= TJ= T
MIN
to T
MAX
, unless otherwise noted, circuit of Figure 6. Typical values are at TA= +25°C.)
(Note 2)
Nonoverlap Time (Dead Time) t
RT/CLKIN Output Voltage V
RT/CLKIN Current Sourcing
Capability
RT/CLKIN Logic-High Threshold V
RT/CLKIN Logic-Low Threshold V
RT/CLKIN High Pulse Width t
RT/CLKIN Synchronization
Frequency Range
CURRENT LIMIT
Internal Average Current-Limit
Threshold
Reverse Average Current-Limit
Threshold
External Average Current-Limit
Threshold Adjustment
AVGLIMIT Ground Threshold
Voltage
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
NO
RT/CLKIN
I
RT/CLKIN
RT/CLKIN_H
RT/CLKIN_L
RT/CLKIN
f
RT/CLKIN
V
CL_
V
RCL_
V
CL_ADJ
V
AVGLIMIT_GND
C
or C
DH_
fSW = 1MHz nominal, RRT = 12.4kΩ -10 +10
V
CSP_
V
CSP_
Resistor-divider connected from REG
to AVGLIMIT to AGND
- V
- V
DL_
CSN_
CSN_
= 5nF
-7.5 +7.5
1.225 V
0.5 mA
2.4 V
0.8 V
30 ns
200 2000 kHz
20.4 22.5 24.75 mV
-3.0 -1.53 -0.1 mV
V
AVGLIMIT
-
0.6/36
550 mV
%
V
Leakage Current at AVGLIMIT I
DIGITAL FAULT INTEGRATION (DF_)
Number of Switching Cycles to
Shutdown in Current Limit
Number of Switching Cycles to
Recover from Shutdown
CURRENT-SENSE AMPLIFIER
CSP_ to CSN_ Input Resistance R
Common-Mode Range V
Input Offset Voltage V
Amplifier Gain A
AVGLIMIT
NS
NR
CMR(CS)
DF_
DF_
CS_
OS(CS)
V(CS)
V
AVGLIMIT
VIN = V
V
IN
VIN = 7V to 28V -0.3 +5.5 V
= 3V 100 nA
32,768
524,288
3.8 kΩ
= 4.75V to 5.5V or
REG
= 5V to 10V
-0.3 +3.6 V
100 μV
36 V/V
Clock
cycles
Clock
cycles
Page 4
MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
4 _______________________________________________________________________________________
ELECTRICAL CHARACTERISTICS (continued)
(VIN= V
REG
= VDD= V
EN_
= +5V, TA= TJ= T
MIN
to T
MAX
, unless otherwise noted, circuit of Figure 6. Typical values are at TA= +25°C.)
(Note 2)
)
Note 2: The device is 100% production tested at TA= TJ= +125°C. Limits at TA= -40°C and TA= +25°C are guaranteed by design.
Note 3: The internal reference voltage accuracy is measured at the negative input of the error amplifiers (EAN_). Output voltage
accuracy must include external resistor-divider tolerances.
-3dB Bandwidth f
CSP_ Input Bias Current I
CURRENT-ERROR AMPLIFIER (CEA_)
Transconductance g
Open-Loop Gain A
VOLTAGE-ERROR AMPLIFIER (EAOUT_)
Open-Loop Gain A
Unity-Gain Bandwidth f
EAN_ Input Bias Current I
Error-Amplifier Output Clamping
High Voltage
Error-Amplifier Output Clamping
Low Voltage
EN_ INPUTS
EN_ Input High Voltage V
EN_ Hysteresis 0.05
EN_ Input Leakage Current I
Startup Delay Time to OUT_ t
MODE INPUT
MODE Logic-High Threshold V
MODE Logic-Low Threshold V
MODE Input Pulldown I
PREBIASED OUTPUT
Peak Sink Current-Limit
Threshold during Reference
Soft-Start
Digital Ramp Period for
Stepping Peak Sink Current
Limit after Reference Soft-Start
THERMAL SHUTDOWN
Thermal Shutdown T
Thermal Shutdown Hysteresis T
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
-3dB
CSA(IN)
m
VOL(CEA)
VOL(EA)
UGEA
BIAS(EA)
V
C LM P_ H I (E A)
V
C LM P_LO ( EA
ENH
EN
START_DELAY
MODE_H
MODE_L
PULLDWN
SHDN
HYST
4 MHz
V
= 5.5V, sinking 120
CSP_
V
= 0V, sourcing 30
CSP_
550 μS
No load 50 dB
70 dB
3 MHz
V
= 2.0V 100 nA
EAN_
With respect to V
With respect to V
EN rising 1.2 1.222 1.245
From EN_ rising to V
- V
V
CSP_
CSN_
CM
CM
-200 +200 nA
rising 1 ms
OUT_
2.4 V
1V
-0.234 V
0.8 V
5μA
-2.1 mV
448
160
10
μA
V
Clock
cycles
°C
Page 5
MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
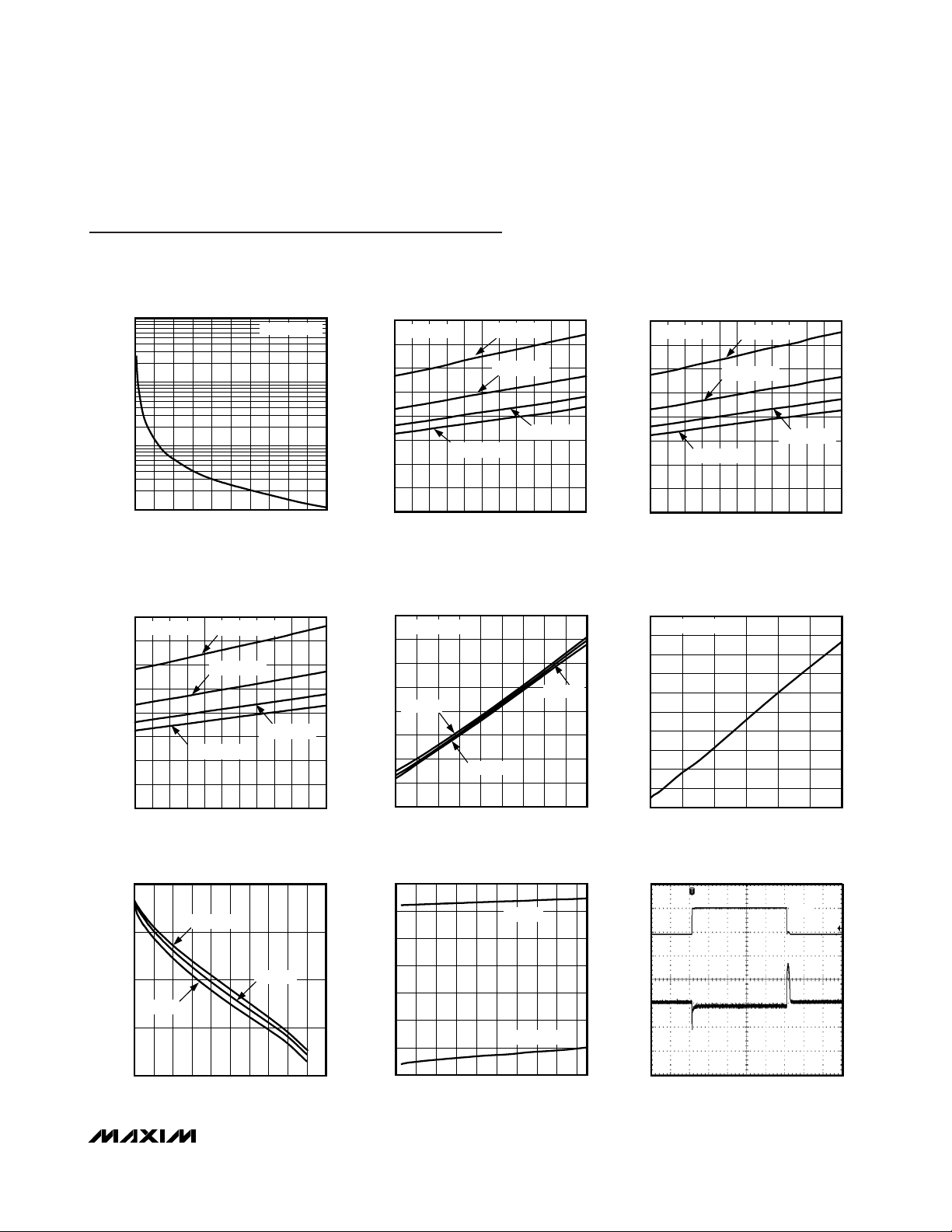
OSCILLATOR FREQUENCY vs. R
T
MAX15034 toc01
RT (kΩ)
OSCILLATOR FREQUENCY (kHz)
900800700600500400300200100
100
1000
10,000
10
0 1000
C
DH_
= C
DL_
= 0
SUPPLY CURRENT
vs. TEMPERATURE AND FREQUENCY
(V
IN
= 5V)
MAX15034 toc02a
TEMPERATURE (°C)
SUPPLY CURRENT (mA)
11095-25 -10 5 35 50 6520 80
2
4
6
8
10
12
14
16
0
-40 125
C
DH_
= C
DL_
= 0
fSW = 1MHz
fSW = 250kHz
fSW = 500kHz
fSW = 125kHz
SUPPLY CURRENT
vs. TEMPERATURE AND FREQUENCY
(V
IN
= 12V)
MAX15034 toc02b
TEMPERATURE (°C)
SUPPLY CURRENT (mA)
11095-25 -10 5 35 50 6520 80
2
4
6
8
10
12
14
16
0
-40 125
C
DH_
= C
DL_
= 0
fSW = 1MHz
fSW = 250kHz
fSW = 500kHz
fSW = 125kHz
SUPPLY CURRENT
vs. TEMPERATURE AND FREQUENCY
(V
IN
= 24V)
MAX15034 toc02c
TEMPERATURE (°C)
SUPPLY CURRENT (mA)
11095-25 -10 5 35 50 6520 80
2
4
6
8
10
12
14
16
0
-40 125
C
DH_
= C
DL_
= 0
fSW = 1MHz
fSW = 250kHz
fSW = 500kHz
fSW = 125kHz
SUPPLY CURRENT
vs. OSCILLATOR FREQUENCY
MAX15034 toc03
FREQUENCY (kHz)
SUPPLY CURRENT (mA)
18001600400 600 800 12001000 1400
7
8
9
10
11
12
13
14
6
200 2000
C
DH_
= C
DL_
= 0
VIN = 24V
VIN = 5V
VIN = 12V
SUPPLY CURRENT
vs. DRIVER LOAD CAPACITANCE
MAX15034 toc04
C
LOAD
(nF)
SUPPLY CURRENT (mA)
252015105
10
20
30
40
50
60
70
80
90
100
0
030
C
LOAD
= C
DH_
= C
DL_
REG LOAD REGULATION
MAX15034 toc05
I
REG
(mA)
V
REG
(V)
908070605040302010
4.95
5.00
5.05
5.10
4.90
0100
VIN = 12V
VIN = 24V
VIN = 5.5V
REG LINE REGULATION
MAX15034 toc06
VIN (V)
V
REG
(V)
2321191715131197
4.98
5.00
5.02
5.04
5.06
5.08
5.10
4.96
5
I
REG
= 0
I
REG
= 60mA
OUTPUT LOAD-TRANSIENT RESPONSE
MAX15034 toc07
2ms/div
10A/div
I
OUT
V
OUT
100mV/div
AC-COUPLED
20A
Typical Operating Characteristics
(Circuit of Figure 6, TA= +25°C, unless otherwise noted. VIN= 12V, V
OUT1
= 0.8V, V
OUT2
= 1.3V, fSW= 500kHz per phase.)
_______________________________________________________________________________________ 5
Page 6
MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
6 _______________________________________________________________________________________
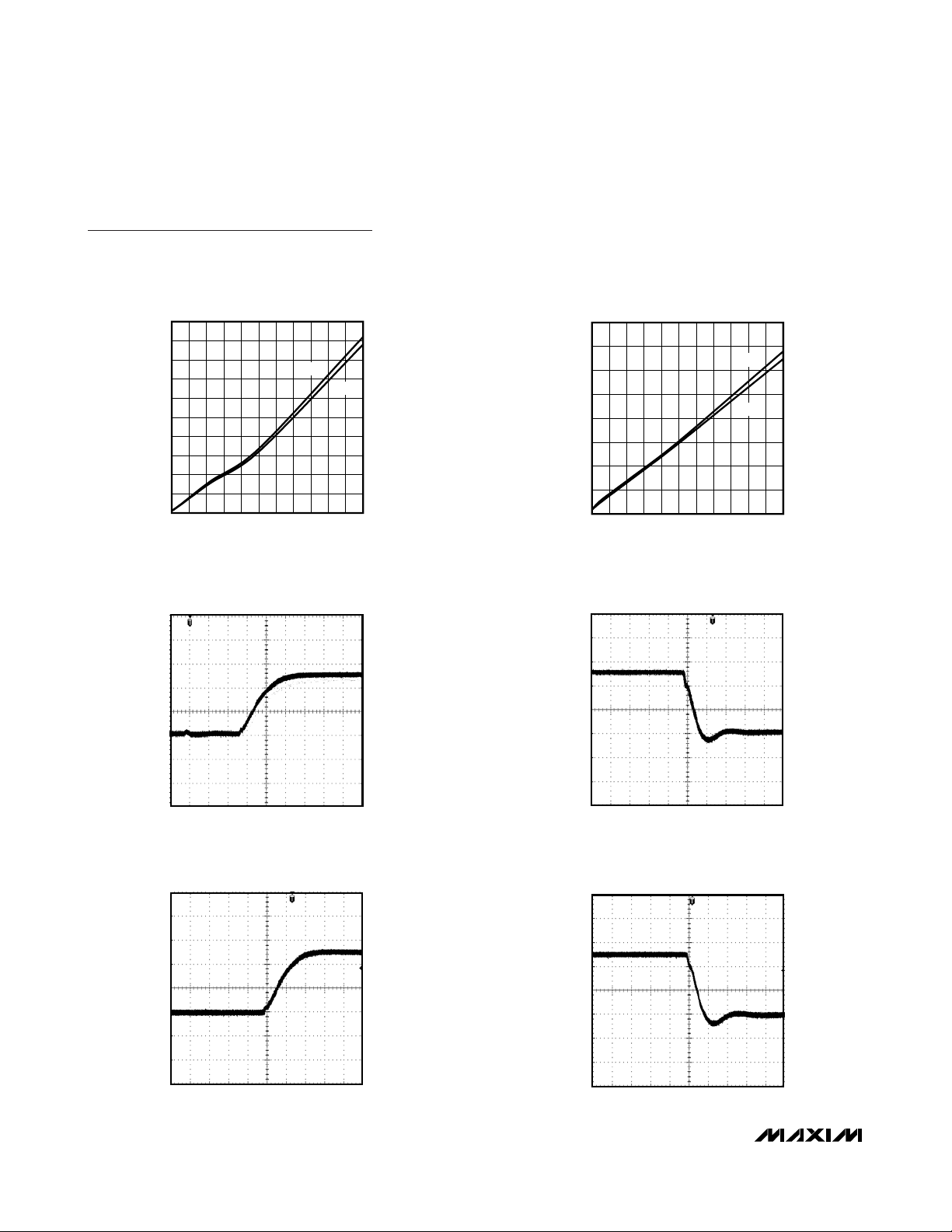
Typical Operating Characteristics (continued)
(Circuit of Figure 6, TA= +25°C, unless otherwise noted. VIN= 12V, V
OUT1
= 0.8V, V
OUT2
= 1.3V, fSW= 500kHz per phase.)
DRIVER RISE TIME
vs. LOAD CAPACITANCE
100
90
80
70
60
(ns)
50
RISE
t
40
30
20
10
0
022
HIGH-SIDE DRIVER RISE TIME
= 12V, C
(V
IN
DRIVER FALL TIME
vs. LOAD CAPACITANCE
40
DH_
C
(nF)
LOAD
MAX15034 toc08
DL_
201814 164 6 8 10 122
35
30
25
(ns)
20
FALL
t
15
10
5
0
022
C
(nF)
LOAD
DL_
DH_
MAX15034 toc09
201814 164 6 8 10 122
HIGH-SIDE DRIVER FALL TIME
LOAD
= 10nF)
MAX15034 toc10
DH_
2V/div
(V
IN
= 12V, C
LOAD
= 10nF)
MAX15034 toc11
DH_
2V/div
= 12V, C
IN
20ns/div
LOAD
20ns/div
= 10nF)
20ns/div
LOW-SIDE DRIVER RISE TIME
(V
IN
= 12V, C
LOAD
20ns/div
= 10nF)
MAX15034 toc12
DL_
2V/div
LOW-SIDE DRIVER FALL TIME
(V
MAX15034 toc13
DL_
2V/div
Page 7
MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
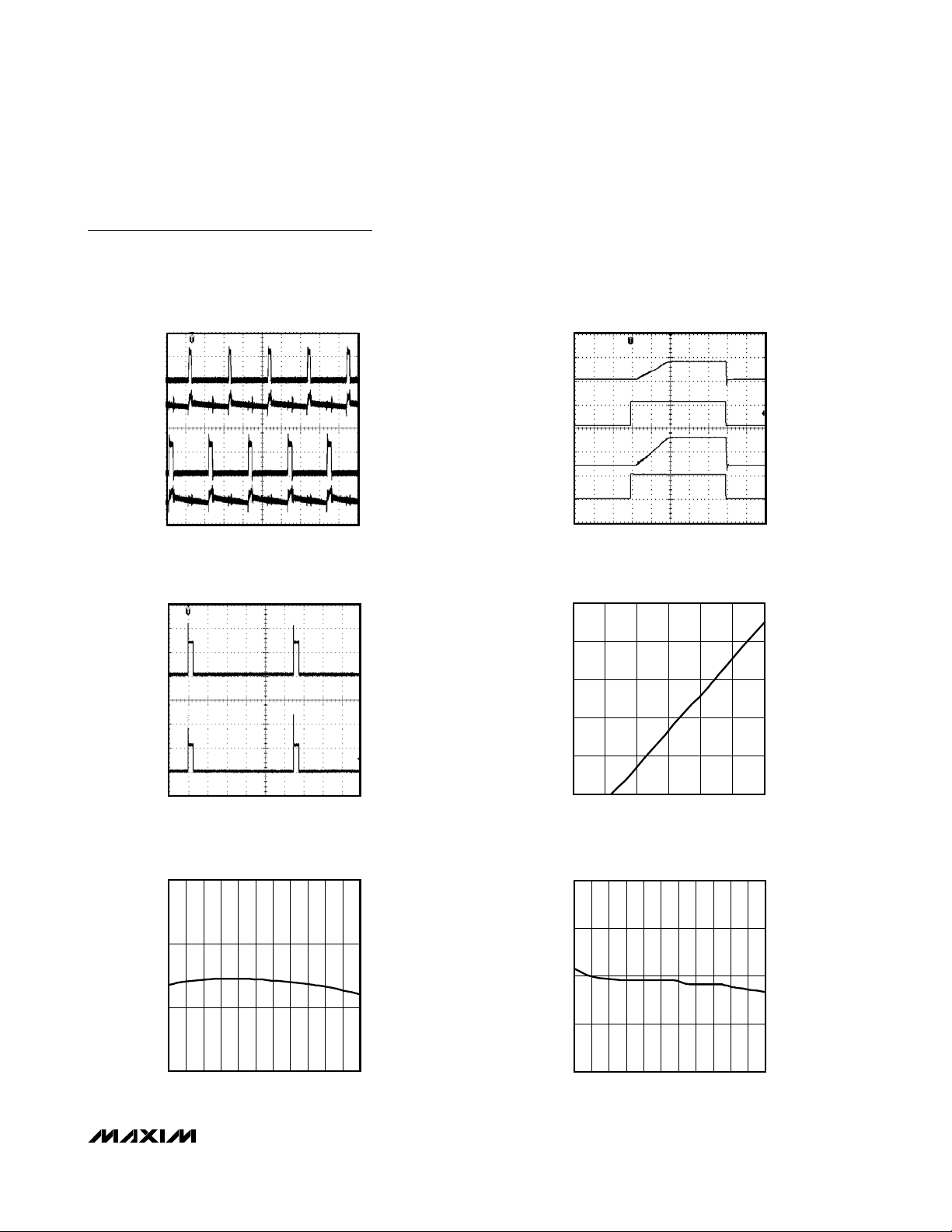
TURN-ON/TURN-OFF WAVEFORM
MAX15034 toc15
1ms/div
V
OUT1
1V/div
EN1
5V/div
EN2
5V/div
V
OUT2
1V/div
_______________________________________________________________________________________ 7
Typical Operating Characteristics (continued)
(Circuit of Figure 6, TA= +25°C, unless otherwise noted. VIN= 12V, V
OUT1
= 0.8V, V
OUT2
= 1.3V, fSW= 500kHz per phase.)
SHORT-CIRCUIT CURRENT WAVEFORMS
(V
IN
= 5V)
MAX15034 toc16
200ms/div
I
OUT2
10A/div
I
OUT1
10A/div
AVERAGE CURRENT LIMIT
vs. V
AVGLIMIT
MAX15034 toc17
V
AVGLIMIT
(V)
AVERAGE CURRENT LIMIT (mV)
15
30
45
60
75
0
2.52.01.51.00.503.0
INTERNAL REFERENCE VOLTAGE
vs. TEMPERATURE
MAX15034 toc18
TEMPERATURE (°C)
INTERNAL REFERENCE VOLTAGE (V)
1109580655035205-10-25
0.610
0.615
0.620
0.605
-40 125
SWITCHING FREQUENCY
vs. TEMPERATURE
MAX15034 toc19
TEMPERATURE (°C)
SWITCHING FREQUENCY (kHz)
475
500
525
550
450
1109580655035205-10-25-40 125
OUT1/OUT2 OUT-OF-PHASE WAVEFORMS
(V
OUT1
= 0.8V, V
10μs/div
OUT2
= 1.3V)
MAX15034 toc14
LX1
10V/div
OUT1
100mV/div
LX2
10V/div
OUT2
100mV/div
Page 8
MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
8 _______________________________________________________________________________________
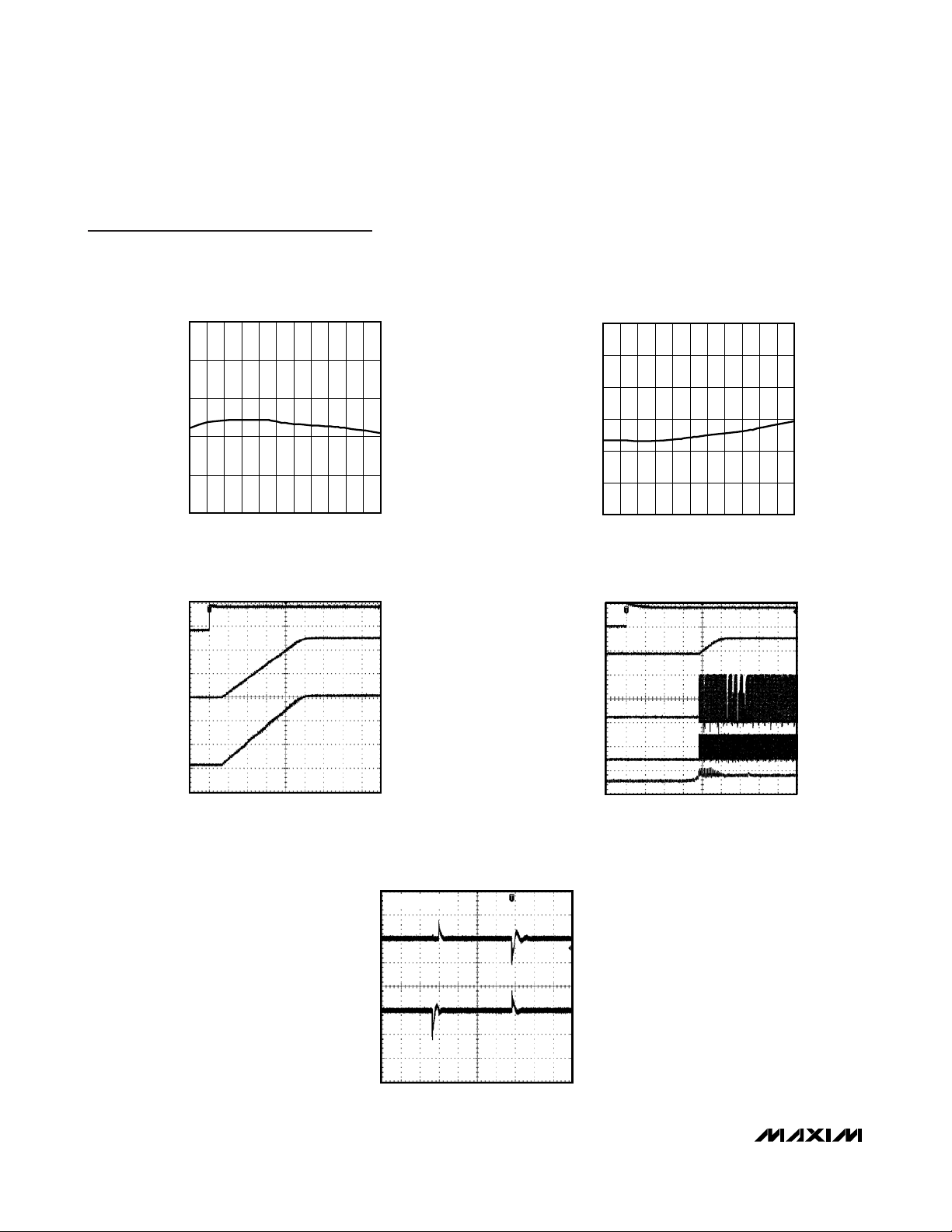
Typical Operating Characteristics (continued)
(Circuit of Figure 6, TA= +25°C, unless otherwise noted. VIN= 12V, V
OUT1
= 0.8V, V
OUT2
= 1.3V, fSW= 500kHz per phase.)
SOFT-START WAVEFORM
MAX15034 toc22
400μs/div
EN2
5V/div
V
OUT2
500mV/div
V
EAN2
200mV/div
PREBIASED OUTPUT CONDITION
MAX15034 toc23
400μs/div
EN2
5V/div
0V
V
OUT2
500mV/div
DH2
5V/div
DL2
5V/div
EAOUT2
1V/div
INTERNAL AVERAGE CURRENT LIMIT
vs. TEMPERATURE
MAX15034 toc20
TEMPERATURE (°C)
INTERNAL AVERAGE CURRENT LIMIT (mV)
21
22
23
24
25
20
1109580655035205-10-25-40 125
INTERNAL AVERAGE REVERSE
CURRENT LIMIT vs. TEMPERATURE
MAX15034 toc21
INTERNAL AVERAGE CURRENT LIMIT (mV)
-2.5
-2.0
-1.5
-1.0
-0.5
0
-3.0
TEMPERATURE (°C)
1109580655035205-10-25-40 125
PEAK PULLUP AND PULLDOWN CURRENT
OR DRIVER AT DH_ AND DL_
MAX15034 toc24
200ns/div
C
LOAD
= 10nF
DH_
500mV/div
DL_
500mV/div
Page 9

MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
_______________________________________________________________________________________ 9
Pin Description
PIN NAME FUNCTION
Current-Sense Differential Amplifier Negative Input for Output 2. Connect CSN2 to the negative terminal of
1 CSN2
2 CSP2
3 EAOUT2
4 EAN2
5 CLP2
6 AVGLIMIT
7 RT/CLKIN
8 AGND Analog Ground
9 MODE
10 CLP1
11 EAN1
12 EAOUT1
13 CSP1
14 CSN1
the sense resistor. The differential voltage between CSP2 and CSN2 is internally amplified by the currentsense amplifier (A
Current-Sense Differential Amplifier Positive Input for Output 2. Connect CSP2 to the positive terminal of the
sense resistor. The differential voltage between CSP2 and CSN2 is internally amplified by the current-sense
amplifier (A
Voltage Error-Amplifier Output 2. Connect to an external gain-setting feedback resistor. The error-amplifier
gain determines the output voltage load regulation for adaptive voltage positioning. This output also serves
as the compensation network connection from EAOUT2 to EAN2. A resistive network results in a drooped
output-voltage-regulation characteristic. An integrator configuration results in very tight output-voltage
regulation (see the Adaptive Voltage Positioning section).
Voltage Error-Amplifier Inverting Input for Output 2. Connect a resistive divider from V
AGND to set the output voltage. A compensation network connects from EAOUT2 to EAN2. A resistive
network results in a drooped output-voltage-regulation characteristic. An integrator configuration results in
very tight output-voltage regulation (see the Adaptive Voltage Positioning section).
Current-Error Amplifier Output 2. Compensate the current loop by connecting an R-C network from CLP2 to
AGND.
Average Current-Limit Programming. Connect a resistor-divider between REG, AVGLIMIT, and AGND to set
the average current-limit value (see the Programming Average the Current Limit section).
External Clock Input or Internal Frequency-Setting Connection. Connect a resistor from RT/CLKIN to AGND
to set the switching frequency. Connect an external clock at RT/CLKIN for external frequency
synchronization.
Mode Function Input. MODE selects between a single-output dual phase or a dual-output buck regulator.
When MODE is grounded, VEA1 and VEA2 connect to CEA1 and CEA2, respectively (see Figure 1) and the
device operates as a two-output, out-of-phase buck regulator. When MODE is connected to REG (logic
high), VEA2 is disconnected and VEA1 is routed to both CEA1 and CEA2.
Current-Error Amplifier Output 1. Compensate the current loop by connecting an R-C network from CLP1 to
AGND.
Voltage Error-Amplifier Inverting Input for Output 1. Connect a resistive divider from V
regulate the output voltage. A compensation network connects from EAOUT1 to EAN1. A resistive network
results in a drooped output-voltage-regulation characteristic. An integrator configuration results in very tight
output-voltage regulation (see the Adaptive Voltage Positioning section).
Voltage Error-Amplifier Output 1. Connect to an external gain-setting feedback resistor. The error-amplifier
gain determines the output-voltage-load regulation for adaptive voltage positioning. This output also serves
as the compensation network connection from EAOUT1 to EAN1. A resistive network results in a drooped
output-voltage-regulation characteristic. An integrator configuration results in very tight output-voltage
regulation (see the Adaptive Voltage Positioning section).
Current-Sense Differential Amplifier Positive Input for Output 1. Connect CSP1 to the positive terminal of the
sense resistor. The differential voltage between CSP1 and CSN1 is internally amplified by the current-sense
amplifier (A
Current-Sense Differential Amplifier Negative Input for Output 1. Connect CSN1 to the negative terminal of
the sense resistor. The differential voltage between CSP1 and CSN1 is internally amplified by the currentsense amplifier (A
V(CS)
V(CS)
= 36V/V).
V(CS)
= 36V/V).
= 36V/V).
= 36V/V).
V(CS)
to EAN2 to
OUT2
to EAN1 to
OUT1
Page 10

MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
10 ______________________________________________________________________________________
Detailed Description
The MAX15034 switching power-supply controller can
be configured two ways. With the MODE input high, this
device operates as single-output, dual-phase, stepdown switching regulators where each output is 180°
out of phase. With MODE connected low, the
MAX15034 operates as a dual-output, step-down
switching regulator. The average current-mode control
topology of the MAX15034 offers high-noise immunity
while having benefits similar to those of peak currentmode control. Average current-mode control has the
intrinsic ability to accurately limit the average current
sourced by the converter during a fault condition. When
a fault condition occurs, the error-amplifier output voltage (EAOUT1 or EAOUT2) that connects to the positive
input of the transconductance amplifier (CA1 or CA2) is
clamped, thus limiting the output current.
The MAX15034 has internal logic to ensure each output’s
monotonic startup under prebias load conditions. This
facilitates glitch-free output voltage power-up in the presence of another redundant/parallel voltage regulator.
The MAX15034 contains all blocks necessary for two
independently regulated average current-mode PWM
regulators. This device has two voltage error amplifiers
(VEA1 and VEA2), two current-error amplifiers (CEA1
and CEA2), two current-sensing amplifiers (CA1 and
CA2), two PWM comparators (CPWM1 and CPWM2),
and drivers for both low- and high-side power MOSFETs
(see Figure 1). Each PWM section is also equipped with
a pulse-by-pulse, current-limit protection and a fault
integration block for hiccup protection.
Pin Description (continued)
PIN NAME FUNCTION
15 EN1
16 BST1
17 DH1 High-Side Gate Driver Output 1. DH1 drives the gate of the high-side MOSFET.
18 LX1
19 DL1 Low-Side Gate Driver Output 1. Gate driver output for the synchronous MOSFET.
20 V
21 REG
22 IN Supply Voltage Connection. Connect IN to a 5V to 28V input supply.
23 PGND
24 DL2 Low-Side Gate Driver Output 2. Gate driver for the synchronous MOSFET.
25 LX2
26 DH2 High-Side Gate Driver Output 2. DH2 drives the gate of the high-side MOSFET.
27 BST2
28 EN2
— EP Exposed Pad. Connect exposed pad to ground plane (MAX15034BAUI only).
DD
Output 1 Enable. A logic-low shuts down channel 1’s MOSFET drivers. EN1 can be used for output
sequencing.
Boost Flying-Capacitor Connection. Reservoir capacitor connection for the high-side MOSFET driver
supply. Connect a 0.47μF ceramic capacitor between BST1 and LX1.
External Inductor Connection and Source Connection for the High-Side MOSFET for Output 1. LX1 also
serves as the return terminal for the high-side MOSFET driver.
Supply Voltage for Low-Side Drivers. REG powers VDD. Connect a parallel combination of 0.1μF and 1μF
ceramic capacitors from V
currents of the driver from the internal circuitry.
Internal 5V Regulator Output. REG is derived internally from IN and is used to power the internal bias
circuitry. Bypass REG to AGND with a 4.7μF ceramic capacitor.
Power Ground. Source connection for the low-side MOSFET. Connect V
PGND.
External Inductor Connection and Source Connection for the High-Side MOSFET for Output 2. Also serves
as the return terminal for the high-side MOSFET driver.
Boost Flying-Capacitor Connection. Reservoir capacitor connection for the high-side MOSFET driver
supply. Connect a 0.47μF ceramic capacitor between BST2 and LX2.
Output 2 Enable. A logic-low shuts down channel 2’s MOSFET drivers. EN2 can be used for output
sequencing.
to PGND and a 1Ω resistor from VDD to REG to filter out the high-peak
DD
’s bypass capacitor returns to
DD
Page 11

MAX15034
Two enable comparators (CEN1 and CEN2) are available to control and sequence the two PWM sections
through the enable (EN1 or EN2) inputs. An oscillator,
with an externally programmable frequency generates
two clock pulse trains and two ramps for both PWM
sections. The two clocks and the two ramps are 180°
out of phase with each other.
A linear regulator (REG) generates the 5V to supply the
device. This regulator has the output-current capability
necessary to provide for the MAX15034’s internal
circuitry and the power for the external MOSFET’s gate
drivers. Internal UVLO circuitry ensures that the
MAX15034 starts up when V
REG
is at the correct voltage levels to guarantee safe operation of the IC and of
the power MOSFETs.
Finally, a thermal-shutdown feature protects the device
during thermal faults and shuts down the MAX15034
when the die temperature exceeds +160°C.
Figure 1. Block Diagram
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
______________________________________________________________________________________ 11
CLP1
EAN1
REG
EN1
10
CA1
12EAOUT1
11
VEA1
IN
21
15
REG
= 5V
V
22
UVLO
FOR INTERNAL
BIASING
1.225V
2V
RAMP
CEN1
CEA1
P-P
DF1 AND
HICCUP
LOGIC
CPWM1
CONTROL
AND DRIVER
LOGIC 1
0°
CSP1
13
CSN1
14
BST1
16
DH1
17
LX1
18
V
20
DD
DL1
19
EN2
AGND
EAN2
EAOUT2
MODE
CLP2
6
V
= 0.61V
INTREF
28
8
VEA2
4
3
9
5
1.225V
CEN2
MUX
AVGLIMIT
THERMAL
SHUTDOWN
2V
P-P
RAMP
CEA2
OSCILLATOR
AND PHASE
SPLITTER
CPWM2
EXTERNAL FREQUENCY SYNC
180°
CONTROL
AND DRIVER
LOGIC 2
DF2 AND
HICCUP
LOGIC
CA2
V
DD
7
27
26
25
24
23
2
1
RT/CLKIN
BST2
DH2
LX2
DL2
PGND
CSP2
CSN2
Page 12

MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
12 ______________________________________________________________________________________
Dual-Output/Dual-Phase Select (MODE)
The MAX15034 can operate as a dual-output, independently regulated buck converter, or as a dual-phase,
single-output buck converter. The MODE input selects
between the two operating modes. When MODE is
grounded (logic-low), VEA1 and VEA2 connect to CEA1
and CEA2, respectively (see Figure 1), and the device
operates as a two-output DC-DC converter. When
MODE is connected to REG (logic-high), VEA2 is disconnected and VEA1 is routed to both CEA1 and CEA2
and the device works as a dual-phase, single-output
buck regulator with each output 180° out of phase with
respect to each other.
Supply Voltage Connections (VIN/V
REG
)
The MAX15034 accepts a wide input voltage range at
IN of 5V to 28V. An internal linear regulator steps down
V
IN
to 5.1V (typ) and provides power to the MAX15034.
The output of this regulator is available at REG. For V
IN
= 4.75V to 5.5V, connect IN and REG together externally. REG can supply up to 65mA for external loads.
Bypass REG to AGND with a 4.7μF ceramic capacitor
for high-frequency noise rejection and stable operation.
REG supplies the current for the MAX15034’s internal
circuitry and for the MOSFET gate drivers (when connected externally to V
DD
), and can source up to 65mA.
Calculate the maximum bias current (I
BIAS
) for the
MAX15034:
where IINis the quiescent supply current into IN (4mA,
typ), Q
GQ1
, Q
GQ2
, Q
GQ3
, Q
GQ4
are the total gate
charges of MOSFETs Q1 through Q4 at VGS= 5V (see
Figure 6), and fSWis the switching frequency of each
individual phase.
Low-Side MOSFET Driver Supply (VDD)
VDDis the power input for the low-side MOSFET drivers. Connect the regulator output REG externally to
VDDthrough an R-C lowpass filter. Use a 1Ω resistor
and a parallel combination of 1μF and 0.1μF ceramic
capacitors to filter out the high peak currents of the
MOSFET drivers from the sensitive internal circuitry.
High-Side MOSFET Drive Supply (BST_)
BST1 and BST2 supply the power for the high-side
MOSFET drivers for output 1 and output 2, respectively.
Connect BST1 and BST2 to VDDthrough rectifier
diodes D1 and D2 (see Figure 6). Connect a 0.1μF
ceramic capacitor between BST_ and LX_.
Minimize the trace inductance from BST_ and VDDto
the rectifier diodes, D1 and D2, and from BST_ and LX_
to the boost capacitors, C8 and C9 (see Figure 6). This
is accomplished by using short, wide trace lengths.
Undervoltage Lockout (UVLO)/
Power-On Reset (POR)/Soft-Start
The MAX15034 includes an undervoltage lockout
(UVLO) with hysteresis, and a power-on reset circuit for
converter turn-on and monotonic rise of the output voltage. The UVLO threshold monitors V
REG
and is internally set between 4.0V and 4.5V with 200mV of
hysteresis. Hysteresis eliminates chattering during
startup. Most of the internal circuitry, including the
oscillator, turns on when V
REG
reaches 4.5V. The
MAX15034 draws up to 4mA (typ) of current before
V
REG
reaches the UVLO threshold.
The compensation network at the current-error amplifiers (CLP1 and CLP2) provides an inherent soft-start of
the output voltage. It includes (R14 and C10) in parallel
with C11 at CLP1 and (R15 and C12) in parallel with
C13 at CLP2 (see Figure 6). The voltage at the currenterror amplifier output limits the maximum current available to charge the output capacitors. The capacitor at
CLP_ in conjunction with the finite output-drive current
of the current-error amplifier yields a finite rise time for
the output current and thus, the output voltage.
Setting the Switching Frequency (fSW)
An internal oscillator generates the 180oout-of-phase
clock signals required for both PWM modulators. The
oscillator also generates the 2V
P-P
voltage ramps necessary for the PWM comparators. The oscillator frequency can be set from 200kHz to 2MHz by an external
resistor (RT) connected from RT/CLKIN to AGND (see
Figure 6). The equation below shows the relationship
between RTand the switching frequency:
where R
RT
is in ohms and the per-phase switching fre-
quency is fSW= f
OSC
/2.
Use RT/CLKIN as a clock input to synchronize the
MAX15034 to an external frequency (f
RT/CLKIN
).
Applying an external clock to RT/CLKIN allows each
PWM section to work at a frequency equal to
f
RT/CLKIN
/2. An internal comparator with a 1.6V thresh-
old detects f
RT/CLKIN
. If f
RT/CLKIN
is present, internal
logic switches from the internal oscillator clock, to the
clock present at RT/CLKIN.
IIfQQQQ
=+×+++
BIAS IN SW GQ GQ GQ GQ
()
1234
.
×25 10
=
OSC
R
RT
10
Hz
Page 13
MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
______________________________________________________________________________________ 13
Hiccup Fault Protection
The MAX15034 includes overload fault protection circuitry
that prevents damage to the power MOSFETs. The fault
protection consists of two digital fault integration blocks
that enable hiccuping under overcurrent conditions. This
circuit works as follows: for every clock cycle the currentlimit threshold is exceeded, the fault integration counter
increments by one count. Thus, if the current-limit condition persists, the counter reaches its shutdown threshold
in 32,768 counts and shuts down the external MOSFETs.
When the MAX15034 shuts down due to a fault, the
counter begins to count down (since the current-limit condition has ended), once every 16 clock cycles. Thus, the
device counts down for 524,288 clock cycles. At this
point, switching resumes. This produces an effective duty
cycle of 6.25% power-up and 93.75% power-down under
fault conditions. With a switching frequency set to
250kHz, power-up and power-down times are approximately 131ms and 2.09s, respectively.
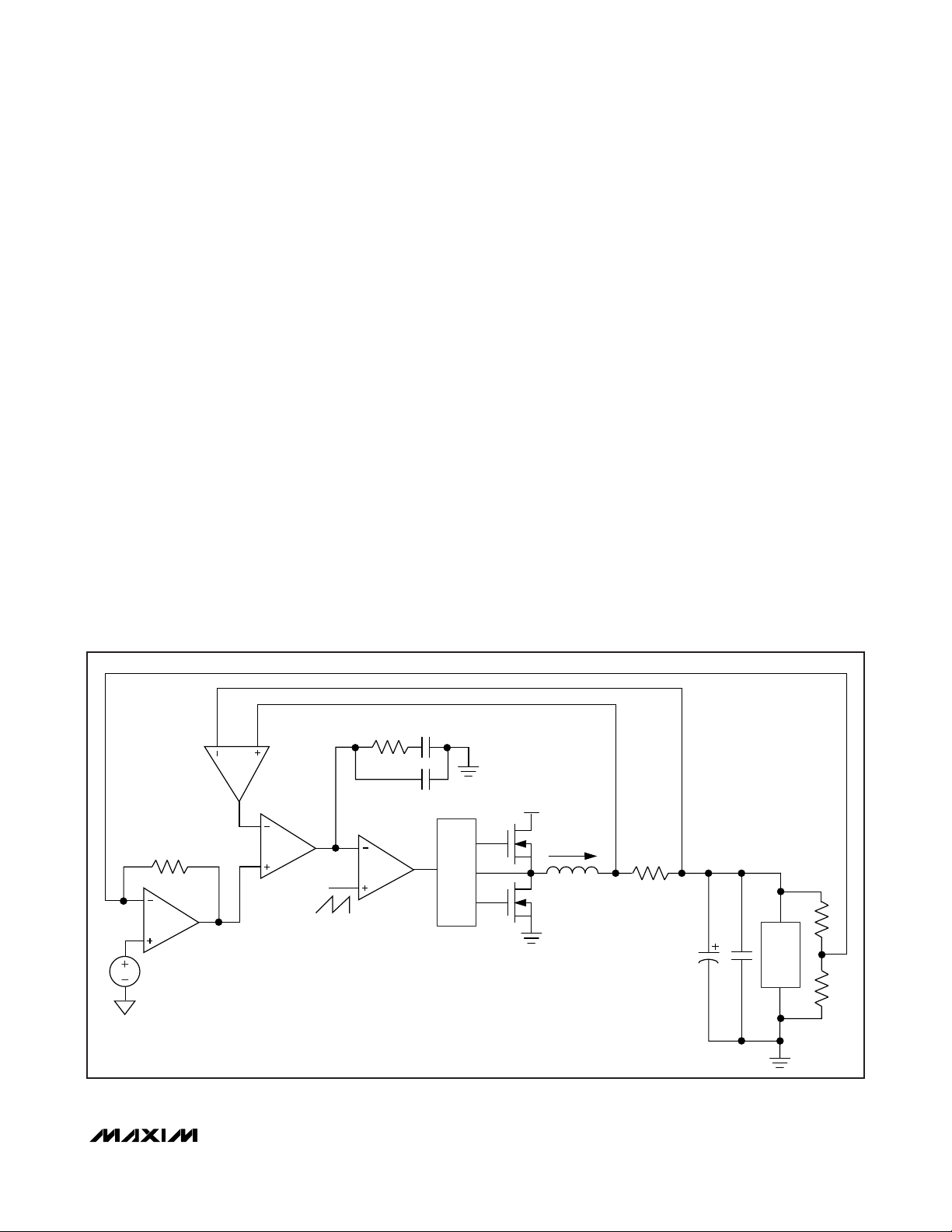
Control Loop
The MAX15034 uses an average current-mode control
topology to regulate the output voltage. The control
loop consists of an inner current loop and an outer voltage loop. The inner current loop controls the output
current, while the outer voltage loop controls the output
voltage. The inner current loop absorbs the inductor
pole, reducing the order of the outer voltage loop to
that of a single-pole system. Figure 2 is the block diagram of OUT1’s control loop.
The current loop consists of a current-sense resistor,
R
SENSE
, a current-sense amplifier (CA1), a currenterror amplifier (CEA1), an oscillator providing the carrier ramp, and a PWM comparator (CPWM1). The
precision current-sense amplifier (CA1) amplifies the
sense voltage across R
SENSE
by a factor of 36. The
inverting input to CEA1 senses the output of CA1. The
output of CEA1 is the difference between the voltageerror amplifier output (EAOUT1) and the gained-up voltage from CA1. The RC compensation network
connected to CLP1 provides external frequency compensation for the respective CEA1 (see the
Compensation
section). The start of every clock cycle
enables the high-side driver and initiates a PWM oncycle. Comparator CPWM1 compares the output voltage from CEA1 against a 0 to 2V ramp from the
oscillator. The PWM on-cycle terminates when the ramp
voltage exceeds the error voltage from the current-error
amplifier (CEA1).
Figure 2. Current and Voltage Loops
CSN1
R
F
VEA1
V
= 0.61V
REF
CSP1
CA 1
CEA1
C
R
CF
CF
CLP1
CPWM1
2V
P-P
C
CFF
DRIVE
V
IN
I
L
R
SENSE
V
OUT1
R1
C
OUT
LOAD
R2
Page 14

MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
14 ______________________________________________________________________________________
The outer voltage control loop consists of the voltageerror amplifier (VEA1). The noninverting input (EAN1) is
externally connected to the midpoint of a resistive voltage-divider from OUT1 to EAN1 to AGND. The voltage
loop gain is set by using an external resistor from the
output of this amplifier (EAOUT1) to its inverting input
(EAN1). The noninverting input of (VEA1) is connected
to the 0.61V internal reference.
Current-Error Amplifier
The MAX15034 features two dedicated transconductance current-error amplifiers CEA1 and CEA2 with a
typical gmof 550μS and 320μA output sink and source
capability. The current-error amplifier outputs (CLP1 and
CLP2) serve as the inverting input to the PWM comparators. CLP1 and CLP2 are externally accessible to provide frequency compensation for the inner current loops
(see C
CFF
, CCF, and RCFin Figure 2). Compensate the
current-error amplifier so that the inductor current down
slope, which becomes the up slope at the inverting
input of the PWM comparator, is less than the slope of
the internally generated voltage ramp (see the
Compensation
section).
PWM Comparator and R-S Flip-Flop
The PWM comparator (CPWM1 or CPWM2) sets the
duty cycle for each cycle by comparing the currenterror amplifier output to a 2V
P-P
ramp. At the start of
each clock cycle an R-S flip-flop resets and the highside drivers (DH1 and DH2) turn on. The comparator
sets the flip-flop as soon as the ramp voltage exceeds
the current-error amplifier output voltage, thus terminating the on-cycle.
Voltage-Error Amplifier
The voltage-error amplifier (VEA_) sets the gain of the
voltage control loop. Its output clamps to 1.14V and
-0.234V relative to VCM= 0.61V. Set the MAX15034 output voltage by connecting a voltage-divider from the
output to EAN_ to GND (see Figure 4). At no load, the
output of the voltage error amplifier is zero.
Use the equation below to calculate the no load voltage:
The voltage at full load is given by:
where Δ V
OUT
is the voltage-positioning window
described in the
Adaptive Voltage Positioning
section.
Adaptive Voltage Positioning
Powering new-generation ICs requires new techniques
to reduce cost, size, and power dissipation. Voltage
positioning (Figure 5) reduces the total number of output capacitors to meet a given transient response
requirement. Setting the no-load output voltage slightly
higher than the output voltage during nominally loaded
conditions allows a larger downward voltage excursion
when the output current suddenly increases.
Regulating at a lower output voltage under a heavy
load allows a larger upward-voltage excursion when
the output current suddenly decreases. A larger
allowed voltage-step excursion reduces the required
number of output capacitors and/or allows the use of
higher ESR capacitors.
The MAX15034 internal 0.6125V reference provides a
tolerance of ±1.25%. Using 0.1% resistors for R1 and
R2 allows a 4% variation from the nominal output voltage. This available voltage range allows the reduction
of the total number of output capacitors to meet a given
transient response requirement resulting in a voltagepositioning window as shown in Figure 5.
From the allowable voltage-positioning window calculate the value of RFfrom the equation below.
where ΔV
OUT
is the allowable voltage-positioning win-
dow, R
SENSE
is the sense resistor, 36 is the current-
sense amplifier gain, and R1is as shown in Figure 4.
V
OUT NL()
.=×+
0 6125 1
⎛
⎜
⎝
⎞
R
1
⎟
R
⎠
2
⎛
⎞
R
V
OUT FL OUT()
.=×+
1
V
−0 6125 1
⎜
⎝
Δ
⎟
R
⎠
2
IR R
F
V
Δ
OUT
×××36
OUT SENSE
R
=
1
Page 15

MAX15034
MOSFET Gate Drivers (DH_, DL_)
The high-side drivers (DH1 and DH2) and low-side drivers (DL1 and DL2) drive the gates of external n-channel
MOSFETs. The high-peak sink and source current capability of these drivers provides ample drive for the fast
rise and fall times of the switching MOSFETs. Faster rise
and fall times result in reduced switching losses. For lowoutput, voltage-regulating applications where the duty
cycle is less than 50%, choose high-side MOSFETs (Q2
and Q4, Figure 6) with a moderate R
DS(ON)
and a very
low gate charge. Choose low-side MOSFETs (Q1 and
Q3, Figure 6) with very low R
DS(ON)
and moderate gate
charge. The driver block also includes a logic circuit that
provides an adaptive nonoverlap time (30ns typ) to prevent shoot-through currents during transition. Figure 7
shows the dual-phase, single-output buck regulator.
Figure 3. Current Comparator and MOSFET Driver Logic
Figure 4. Voltage Error Amplifier
Figure 5. Defining the Voltage-Positioning Window
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
______________________________________________________________________________________ 15
CLP_
A
= 36V/V
CSP_
CSN_
GM
RAMP
CLK
EN_
IN
2 x fSW (V/S)
V
gm = 500μS
PWM
COMPARATOR
1.225V
V
OUT
V
CNTR
+ ΔV
OUT
V
DD
BST_
S
R
/2
Q
Q
DH_
LX_
DL_
PGND
VOLTAGE-POSITIONING WINDOW
R
F
R
1
C
OUT
LOAD
EAN_
R
2
V
= 0.61V
REF
EAOUT_
V
CNTR
- ΔV
V
CNTR
/2
OUT
NO LOAD
1/2 LOAD
LOAD (A)
FULL LOAD
Page 16

MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
16 ______________________________________________________________________________________
Figure 6. Dual-Output Buck Regulator
V
IN
1μF
R1
0.8V/10A
680μF
C6
R4
1.74kΩ
R5
4.64kΩ
2mΩ
C2
(100mA, 30V)
V
REG
L1
0.5μH
0.1μF
R16
100kΩ
R17
100kΩ
V
IN
MAX15034
AVGLIMIT
REG
V
D1
22Ω
29.4kΩ
C15
0.1μF
Q2
IRF7821
Q1
IRF7832
R8
C14
0.1μF
C8
DD
BST1
DH1
LX1
DL1
CSP1
CSN1
EAN1
EAOUT1
EN1
EN2
PGND
RT/CLKIN
REG
BST2
DH2
LX2
DL2
PGND
CSP2
CSN2
EAN2
EAOUT2
MODE
CLP1
CLP2
AGND
22Ω
Q4
IRF7821
Q3
IRF7832
60.4kΩ
R3
1Ω
D2
(100mA, 30V)
C9
0.1μF
L2
0.8μH
R9
C10
R14
15nF
1kΩ
C11
120pF
C13
120pF
C12
15nF
R15
1kΩ
C3
0.1μF
2mΩ
R2
C4
4.7μF
5.11kΩ
4.75kΩ
C7
680μF
C5
10μF
R6
R7
1.3V/10A
EXTERNAL FREQUENCY SYNC
24.9kΩ
R18
19.6kΩ
R
T
R19
10kΩ
Page 17

MAX15034
Figure 7. Dual-Phase, Single-Output Buck Regulator
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
______________________________________________________________________________________ 17
V
IN
C5
C4
4.7μF
10μF
1.3V/20A
680μF
V
D1
(100mA, 30V)
C2
1μF
C8
0.1μF
R1
2mΩ
C6
L1
0.8μH
22Ω
Q2
IRF7821
Q1
IRF7832
DD
BST1
DH1
LX1
DL1
IN
MAX15034
REG
BST2
DH2
LX2
DL2
22Ω
Q4
IRF7821
Q3
IRF7832
D2
(100mA, 30V)
C9
0.1μF
L2
0.8μH
C3
0.1μF
2mΩ
R3
1Ω
R2
R4
5.11kΩ
R5
4.75kΩ
PGND
CSP1
CSN1
EAN1
R8
60.4kΩ
V
REG
R16
100kΩ
R17
100kΩ
C15
0.1μF
C14
0.1μF
EAOUT1
EN1
EN2
PGND
24.9kΩ
RT/CLKIN
R
T
AVGLIMIT
CSP2
CSN2
EAN2
EAOUT2
MODE
CLP1
CLP2
AGND
1kΩ
R15
1kΩ
R14
TO REG
C11
120pF
C13
120pF
C10
15nF
C12
15nF
EXTERNAL FREQUENCY SYNC
Page 18

MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
18 ______________________________________________________________________________________
Design Procedures
Inductor Selection
The switching frequency per phase, peak-to-peak ripple
current in each phase, and allowable voltage ripple at
the output, determine the inductance value. Selecting
higher switching frequencies reduces the inductance
requirement, but at the cost of lower efficiency due to
the charge/discharge cycle of the gate and drain
capacitances in the switching MOSFETs. The situation
worsens at higher input voltages, since capacitive
switching losses are proportional to the square of the
input voltage. Lower switching frequencies on the other
hand increase the peak-to-peak inductor ripple current
(ΔI
L
), and therefore, increase the MOSFET conduction
losses (see the
Power MOSFET Selection
section for a
detailed description of MOSFET power loss).
When using higher inductor ripple current, the ripple cancellation in the multiphase topology, reduces the input
and output capacitor RMS ripple current. Use the following equation to determine the minimum inductance value:
Choose ΔI
L
to be equal to approximately 30% of the output current per channel. Since ΔILaffects the output-ripple voltage, the inductance value may need minor
adjustment after choosing the output capacitors for fullrated efficiency. Choose inductors from the standard
high-current, surface-mount inductor series available
from various manufacturers. Particular applications may
require custom-made inductors. Use high-frequency core
material for custom inductors. High ΔILcauses large
peak-to-peak flux excursion increasing the core losses at
higher frequencies. The high-frequency operation coupled with high ΔIL, reduces the required minimum inductance and even makes the use of planar inductors
possible. The advantages of using planar magnetics
include low-profile design, excellent current sharing
between phases due to the tight control of parasitics, and
low cost. For example, the minimum inductance at VIN=
12V, V
OUT
= 0.8V, ΔIL= 3A, and fSW= 500kHz is 0.5μH.
The average current-mode control feature of the
MAX15034 limits the maximum inductor current, which
prevents the inductor from saturating. Choose an
inductor with a saturating current greater than the
worst-case peak inductor current:
where 24.75mV is the maximum average current-limit
threshold for the current-sense amplifier and R
SENSE
is
the sense resistor.
Power MOSFET Selection
When choosing the MOSFETs, consider the total gate
charge, R
DS(ON)
, power dissipation, the maximum
drain-to-source voltage, and package thermal impedance. The product of the MOSFET gate charge and onresistance is a figure of merit, with a lower number
signifying better performance. Choose MOSFETs optimized for high-frequency switching applications. The
average gate-drive current from the MAX15034’s output
is proportional to the total capacitance it drives at DH1,
DH2, DL1, and DL2. The power dissipated in the
MAX15034 is proportional to the input voltage and the
average drive current. See the
Supply Voltage
Connections (VIN/V
REG
)
and the
Low-Side MOSFET
Drives Supply (VDD)
sections to determine the maximum total gate charge allowed from all driver outputs
together.
The losses may be broken into four categories: conduction loss, gate drive loss, switching loss, and output loss.
The following simplified power loss equation is true for
both MOSFETs in the synchronous buck-converter:
For the low-side MOSFET, the P
SWITCH
term becomes
virtually zero because the body diode of the MOSFET is
conducting before the MOSFET is turned on.
Tables 1 and 2 describe the different losses and shows
an approximation of the losses during that period.
Input Capacitance
The discontinuous input-current waveform of the buck
converter causes large ripple currents in the input
capacitor. The switching frequency, peak inductor current, and the allowable peak-to-peak voltage ripple
reflected back to the source, dictate the capacitance
requirement. Increasing the number of phases increases the effective switching frequency and lowers the
peak-to-average current ratio, yielding lower input
capacitance requirement. It can be shown that the
worst-case RMS current occurs when only one controller section is operating. The controller section with
the highest output power needs to be used in determining the maximum input RMS ripple current requirement.
Increasing the output current drawn from the other outof-phase controller section results in reducing the input
VV V
()
OUT IN MAX OUT
L
=
Vf I
××
IN SW L
I
_
L PEAK
24 75 10
−
()
Δ
. =×
R
SENSE
−
3
Δ
+
I
L
2
PP P
LOSS CONDUCTION GATEDRIVE
=+
PP
++
SWITCH OUTP
UUT
Page 19

MAX15034
ripple current. A low-ESR input capacitor that can handle the maximum input RMS ripple current of one channel must be used. The maximum RMS capacitor ripple
current is given by:
where I
MAX
is the full load current of the regulator. V
OUT
is the output voltage of the same regulator and CINis C5
in Figure 6. The ESR of the input capacitors wastes
power from the input and heats up the capacitor.
Reducing the ESR is important to maintain a high overall
efficiency and in reducing the heating of the capacitors.
Output Capacitors
The worst-case peak-to-peak inductor ripple current,
the allowable peak-to-peak output ripple voltage, and
the maximum deviation of the output voltage during
step loads determine the capacitance and the ESR
requirements for the output capacitors. The output ripple can be approximated as the inductor current ripple
multiplied by the output capacitor’s ESR (R
ESR_OUT
).
The peak-to-peak inductor current ripple is given by:
During a load step, the allowable deviation of the output
voltage during the fast transient load dictates the output
capacitance and ESR. The output capacitors supply the
load step until the controller responds with a greater duty
cycle. The response time (t
RESPONSE
) depends on the
closed-loop bandwidth of the regulator. The resistive
drop across the capacitor’s ESR and capacitor discharge
causes a voltage drop during a load step. Use a combination of SP polymer and ceramic capacitors for better
transient load and ripple/noise performance.
Table 1. High-Side MOSFET Losses
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
______________________________________________________________________________________ 19
LOSS DESCRIPTION SEGMENT LOSS
PIR
CONDUCTION RMS DS ON
where I
PVQQf
GATEDRIVE DD G GD SW
PVI
SWITCH IN LOA
where I
OUTPUT
≈×
RMS
=×
=×
GATE
QQ
OSS HS OSS LS
=
Conduction Loss
Gate Drive Loss
Switching Loss
Output Loss
Losses associated with MOSFET on-time and
on-resistance. I
and duty cycle.
Losses associated with charging and
discharging the gate capacitance of the
MOSFET every cycle. Use the MOSFET’s (Q
specification.
Losses during the drain voltage and drain
current transitions for every switching cycle.
Losses occur only during the Q
time period and not during the initial Q
period. The initial Q
gate voltage from zero to V
side MOSFET driver’s on-resistance and R
is the internal gate resistance of the high-side
MOSFET (Q
MOSFET data sheet).
Losses associated with Q
occur every cycle when the high-side MOSFET
turns on. The losses are caused by both
MOSFETs, but are dissipated in the high-side
MOSFET.
is a function of load current
RMS
period is the rise in the
GS1
TH. RDH_
GD
and Q
are found in the
GS2
of the MOSFET
OSS
and Q
GS2
is the high-
G
GD
GS1
GATE
)
=×
2
V
OUT
V
IN
()
DDSW
R=× (
2 ++ R
DH
() ()
2
()
II
LOAD
f
××
V
DD
_
GATE
+
×−
QQ
+()
GS GD
2
I
GATE
)
××P
Vf
IN SW
()
−
V
IN
VVV
II
CIN RMS MAX
≈
()
OUT IN OUT
VD
ΔI
=
L
OUT
Lf
−×()1
SW
Page 20

MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
20 ______________________________________________________________________________________
Keep the maximum output-voltage deviation less than
or equal to the adaptive voltage-positioning window
(ΔV
OUT
). During a load step, assume a 50% contribution each from the output capacitance discharge and
the voltage drop across the ESR (ΔV
OUT
= ΔV
ESR_OUT
+ ΔV
Q_OUT
). Use the following equations to calculate
the required ESR and capacitance value:
where I
LOAD_STEP
is the step in load current and
t
RESPONSE
is the response time of the controller.
Controller response time depends on the control-loop
bandwidth. C
OUT
is C6 and C7 in Figure 6.
Current Limit
The MAX15034 incorporates two forward current-limit
protection mechanisms, average current limit and hiccup fault current limit, which accurately limit the output
current per phase. The average current-mode control
technique of the MAX15034 accurately limits the maximum average output current per phase. The
MAX15034 senses the voltage across either a sense
resistor or can implement lossless inductor sense,
sensing the voltage across the parasitic resistance of
the inductor (DCR). Use either mechanism to limit the
maximum inductor current.
The minimum average voltage, at which the voltage
across the current-sense resistor is clamped, is either
internally set to 20.4mV or is controlled by the voltage
at AVGLIMIT. The AVGLIMIT ground threshold of
550mV (typ) is the threshold above which the control of
the average current-limit voltage is transferred from the
internal 20.4mV (min) reference to the externally set
V
AVGLIMIT
. For using the internal average current-limit
value, short AVGLIMIT to AGND. The minimum (internally set) average current limit is set at:
For example, the current-sense resistor:
for a maximum output current limit of 10A. A standard
value is 2mΩ. Also, adjust the value of the currentsense resistor to compensate for parasitics associated
with the PCB. Select a noninductive resistor with an
appropriate wattage rating.
The implementation is shown in Figure 8.
When sensing directly across the inductor, connect an
RC circuit directly across the shunt or inductor (see
Figure 9).
Table 2. Low-Side MOSFET Losses
Note: The gate drive losses are distributed between the drivers and the MOSFETs in the ratio of the gate driver’s resistance and the
MOSFET’s internal gate resistance.
LOSS DESCRIPTION SEGMENT LOSSES
PIR
Conduction Loss
Gate Drive Loss
Losses associated with MOSFET on-time, I
is a function of load current and duty cycle.
Losses associated with charging and
discharging the gate of the MOSFET every
cycle. There is no QGD charging involved in this
MOSFET due to the zero-voltage turn-on. The
charge involved is (Q
- QGD).
G
V
Δ
ESR OUT
R
ESR OUT
_
C
OUT
=
It
LOAD STEP RESPONSE
=
_
I
LOAD STEP
_
×
_
Δ
V
Q OUT
_
RMS
CONDUCTION RMS DS ON
where I
PVQQf
RMS
GATEDRIVE DD G GD SW
I
LIMIT MIN
=×
2
VV
−
IN OUT
≈
=×
V
IN
()
.=20 4
()
R
SENSE
mV
()
×
I
LOAD
×−
mV
R
SENSE
20 4
==
10
A
204.. Ω
m
Page 21

MAX15034
Set the RC time constant to be 1.1 to 1.2 times the
inductor time constant (L/DCR). Select C1 to be in the
0.1μF to 0.47μF range, and then calculate R1 from:
In some applications, it may be useful to add a resistor
(R2 in Figure 9) in series with the CSN_ connection to
minimize input offset error. Set R2 equal to R1. It may
also prove useful to add capacitor C3 (Figure 9) in
parallel with R2 to aid in short-circuit recovery. Set C3
equal to C1. Finally, it may be helpful to add a 100pF
(C2) capacitor immediately across the CSP_ and CSN_
inputs to minimize high-frequency noise pick-up at the
IC in some applications.
For current-sense resistors that have a noticeable
inductance component, use lossless inductor sense
implementation (and design procedure). See Figure 10.
Table 3 highlights the tradeoffs of each current-sense
method.
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
______________________________________________________________________________________ 21
Figure 8. Noninductive Resistive Sense
Figure 9. Lossless Inductor Sense
Table 3. Current-Sense Configurations
MAX15034
CSP_
CSN_
MAX15034
CSP_
CSN_
LX_
LX_
C2*
L
OUT
INDUCTOR
L
R1
R
SENSE
DCR
C1
R2*
V
OUT
C3*
*OPTIONAL.
V
OUT
LH
12
.[]
Rk
1
[]
ΩΩ=
DCR m C F
××μ
[] []
1
μ
METHOD
Output Current-Sense Resistor High Allowed (highest accuracy) R
Equivalent Inductor DC Resistance Low Allowed No additional loss
CURRENT-SENSE
ACCURACY
INDUCTOR-SATURATION
PROTECTION
CURRENT-SENSE POWER
LOSS (EFFICIENCY)
x I
SENSE
OUT
2
Page 22

MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
22 ______________________________________________________________________________________
The MAX15034 provides precision average current-limit
programmability while using standard sense resistors
or shunts. Use the equation below to determine the
appropriate V
AVGLIMIT
external reference voltage at
AVGLIMIT:
For example, assuming the desired average current
limit is 18A, and R
SENSE
= 2mΩ.
where R
SENSE
is determined from maximum load current, wattage rating, and circuit parasitics (see above)
and I
LOAD(MAX)
from circuit requirements. V
AVGLIMIT
is
the average current-limit reference voltage selected for
a desired I
LOAD(MAX)
and is set by a resistive voltage-
divider from REG to AGND. See the
Programming the
Average Current Limit
section.
The second current-protection circuit is the hiccup fault
protection as explained in the
Hiccup Fault Protection
section. The average current during a short at the output is given by:
Programming the Average Current Limit
The MAX15034 average current-limit reference voltage
is set by connecting a resistor-divider network from
REG to AGND, the center node is connected to
AVGLIMIT. The resistive divider’s upper resistor, R1, is
connected between REG and the AVGLIMIT. The resistive divider’s lower resistor, R2, is connected between
the AVGLIMIT and AGND.
The resistor-divider values are determined by first,
choosing R2. To minimize reference noise select R2
such that (R1 + R2) < 100kΩ; a typical value is 10kΩ.
Next, determine R1 from:
From the example above, assuming V
AVGLIMIT
= 1.91V:
A standard value for R1 is 16.2kΩ. Connect AVGLIMIT
to AGND for default current limit
V
Figure 10. Inductive Sense Resistor
SENSE RESISTOR (INDUCTIVE)
LX_
L
OUT
ESL
R
SENSE
V
OUT
MAX15034
CSP_
C2
CSN_
VRmIA
AVGLIMIT SENSE LOAD MAX
=× ×
()
Ω 6612 5.m
()
+56 [ ] [ ]
VmAmV
AVGLIMIT
=××
2 36 18 612 5
Ω .
()
mV V
==
1910 1 91
+
.
II
AVG SHORT LOAD MAX() ()
.=×0 0625
R1
C1
R2
C3
RR
12 1
Rk
⎛
V
⎜
V
⎝
AVGLIMIT
REG
=× −
⎛
k
10
=×Ω
⎜
V
⎝
AVGLIMT
⎛
⎜
⎝
191
.
V
5
⎞
⎟
⎠
V
5
(()
MAX
⎞
11618=× −
=ΩΩ
⎟
⎠
V
⎛
⎜
⎝
[]
V
.
20 4..mV
R
SENSE
−
1
k110
⎞
⎟
⎠
⎞
⎟
⎠
Page 23

MAX15034
Reverse Current Limit
The MAX15034 limits the reverse current when the output capacitor voltage is higher than the preset output
voltage. Calculate the maximum reverse current limit
based on V
CLMP_LO
and the current-sense resistor
R
SENSE
.
Output-Voltage Setting
The output voltage is set by the combination of resistors
R1, R2, and RFas described in the
Voltage-Error
Amplifier
section. First select a value for resistor R2. Then
calculate the value of R1 from the following equation:
where V
OUT(NL)
is the voltage at no load. Then find the
value of R
F
from the following equation:
where ΔV
OUT
is the allowable drop in voltage from no
load to full load. RFis R8 and R9, R1 is R4 and R6, R2
is R5 and R7 in Figure 6.
Compensation
The MAX15034 uses an average current-mode control
scheme to regulate the output voltage (see Figure 2).
The main control loop consists of an inner current loop
and an outer voltage loop. The voltage error amplifier
(VEA1 and VEA2) provides the controlling voltage for
the current loop in each phase. The output inductor is
hidden inside the inner current loop. This simplifies the
design of the outer voltage control loop and also
improves the power-supply dynamics. The objective of
the inner current loop is to control the average inductor
current. The gain-bandwidth characteristic of the current loop can be tailored for optimum performance by
the compensation network at the output of the currenterror amplifier (CEA1 or CEA2). Compared with peak
current-mode control, the current-loop gain crossover
frequency, fC, can be made approximately the same,
but the gain at low frequencies is much higher. This
results in the following advantages over peak currentmode control.
1) The average current tracks the programmed current with a high degree of accuracy.
2) Slope compensation is not required, but there is a
limit to the loop gain at the switching frequency to
achieve stability.
3) Noise immunity is excellent.
4) The average current-mode method can be used to
sense and control the current in any circuit branch.
For stability of the current loop, the amplified inductorcurrent downslope at the negative input of the PWM
comparator (CPWM1 and CPWM2) must not exceed
the ramp slope at the comparator’s positive input. This
puts an upper limit on the current-error amplifier gain at
the switching frequency. The inductor current downslope is given by V
OUT
/L where L is the value of the
inductor (L1 and L2 in Figure 6) and V
OUT
is the output
voltage. The amplified inductor current downslope at
the negative input of the PWM comparator is given by:
where R
SENSE
is the current-sense resistor (R1 and R2
in Figure 6) and gMx RCFis the gain of the current-error
amplifier (CEA_) at the switching frequency. The slope
of the ramp at the positive input of the PWM comparator
is 2V x fSW. Use the following equation to calculate the
maximum value of RCF(R14 or R15 in Figure 6).
The highest crossover frequency f
CMAX
is given by:
or alternatively:
Equation (1) can now be rewritten as:
F
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
______________________________________________________________________________________ 23
−
I
REVERSE
155 10
.
=
R
×
SENSE
3
V
(.)
OUT NL
R
1
=
IR R
OUT SENSE
R
=
F
0 6125
−
()
0 6125
.
×××36
V
Δ
OUT
R
×
2
1
V
ΔΔV
OUT
L
=× ×××36
t
RgR
L
SENSE m C
fL
××
2
R
≤
CF
VR g
OUT SENSE m
f
CMAX
SW
×××
fV
SW IN
=
×2π
×
V
OUT
36
1()
fV
××2π
CMAX OUT
f
=
SW
V
IN
fL
××
π
R
=
CF
VR g
C
×××
IN S m
9
2()
Page 24

MAX15034
In practical applications, pick the crossover frequency
(fC) in the range of:
First calculate R
CF
in equation 2 above. Calculate C
CF
so that:
where C
CF
is C10 and C12 in Figure 6.
Calculate C
CFF
so that:
where C
CFF
is C11 and C13 in Figure 6.
Applications Information
Independent Turn-On and Turn-Off
The MAX15034 can be used to regulate two outputs
from one controller. Each of the two outputs can be
turned on and off independently of one another by controlling the enable input of each phase (EN1 and EN2).
A logic-low on each enable pin shuts down the
MOSFET drivers for that phase. When the voltage on the
enable pin exceeds 1.2V, the drivers are turned on and
the output can come up to regulation. This method of
turning on the outputs allows the MAX15034 to be used
for power sequencing.
PCB Layout Guidelines
Careful PCB layout is critical to achieve low losses, low
output noise, and clean and stable operation. This is
especially true for dual-phase converters where one
channel can affect the other. Use the following guidelines for PCB layout:
1) Place the V
DD
, REG, and the BST1 and BST2 bypass
capacitors close to the MAX15034.
2) Minimize all high-current switching loops.
3) Keep the power traces and load connections short.
This practice is essential for high efficiency. Use
thick copper PCBs (2oz or higher) to enhance efficiency and minimize trace inductance and resistance.
4) Run the current-sense lines CSP_ and CSN_ very
close to each other to minimize loop areas. Do not
cross these critical signal lines through power circuitry. Sense the current right at the pads of the
current-sense resistors.
5) Place the bank of output capacitors close to the
load.
6) Isolate the power components on the top side from
the analog components on the bottom side with a
ground plane in between.
7) Provide enough copper area around the switching
MOSFETs, inductors, and sense resistors to aid in
thermal dissipation and reducing resistance.
8) Distribute the power components evenly across the
top side for proper heat dissipation.
9) Keep AGND and PGND isolated and connect them
at one single point close to the IC. Do not connect
them together anywhere else.
10) Place all input bypass capacitors for each input as
close to each other as is practical.
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
24 ______________________________________________________________________________________
f
SW
10 2
C
=
CF
2 π
C
=
CFF
×× × ×
210π
f
SW
f
<<
C
10
fR
×× ×
CCF
1
fR
CCF
Page 25

MAX15034
Configurable, Single-/Dual-Output, Synchronous
Buck Controller for High-Current Applications
Maxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit patent licenses are
implied. Maxim reserves the right to change the circuitry and specifications without notice at any time.
Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 408-737-7600 ____________________
25
© 2008 Maxim Integrated Products is a registered trademark of Maxim Integrated Products, Inc.
Package Information
For the latest package outline information, go to
www.maxim-ic.com/packages
.
PACKAGE TYPE PACKAGE CODE DOCUMENT NO.
28 TSSOP U28-2
21-0066
28 TSSOP-EP U28E-4
21-0108
28
27
26
25
24
23
22
21
20
19
18
17
16
15
1
2
3
4
5
6
7
8
9
10
11
12
13
14
EN2
BST2
DH2
LX2
DL2
PGND
EN1
IN
REG
V
DD
DL1
LX1
DH1
BST1
CSN1
CSP1
EAOUT1
EAN1
CLP1
MODE
AGND
RT/CLKIN
AVGLIMIT
CLP2
EAN2
EAOUT2
CSP2
CSN2
TSSOP
TOP VIEW
MAX15034
*EXPOSED PAD
*CONNECT EXPOSED PAD TO GROUND PLANE.
MAX15034A DOES NOT HAVE AN EXPOSED PAD.
+
Pin Configuration Chip Information
PROCESS: BiCMOS
 Loading...
Loading...