

Page 1
Features
• Utilizes the AVR
• AVR – High-performance and Low-power RISC Architecture
– 90 Powerful Instructions – Most Single Clock Cycle Execution
– 32 x 8 General-purpose Working Registers
– Up to 4 MIPS Throughput at 4 MHz
• Nonvolatile Program Memory
– 2K Bytes of Flash Program Memory
– Endurance: 1,000 Write/Erase Cycles
– Programming Lock for Flash Program Data Security
• Peripheral Features
– Interrupt and Wake-up on Low-level Input
– One 8-bit Timer/Counter with Separate Prescaler
– On-chip Analog Comparator
– Programmable Watchdog Timer with On-chip Oscillator
– Built-in High-current LED Driver with Programmable Modulation
• Special Microcontroller Features
– Low-power Idle and Power-down Modes
– External and Internal Interrupt Sources
– Power-on Reset Circuit with Programmable Start-up Time
– Internal Calibrated RC Oscillator
• Power Consumption at 1 MHz, 2V, 25°C
– Active: 3.0 mA
– Idle Mode: 1.2 mA
– Power-down Mode: <1 µA
• I/O and Packages
– 11 Programmable I/O Lines, 8 Input Lines and a High-current LED Driver
– 28-lead PDIP, 32-lead TQFP, and 32-pad MLF
• Operating Voltages
–V
: 1.8V - 5.5V for the ATtiny28V
CC
: 2.7V - 5.5V for the ATtiny28L
–V
CC
• Speed Grades
– 0 - 1.2 MHz for the ATtiny28V
– 0 - 4 MHz For the ATtiny28L
®
RISC Architecture
8-bit
Microcontroller
with 2K Bytes of
Flash
ATtiny28L
ATtiny28V
Pin Configurations
PDIP
RESET
XTAL1
XTAL2
(AIN0) PB0
PD0
PD1
PD2
PD3
PD4
VCC
GND
PD5
PD6
PD7
1
2
3
4
5
6
7
8
9
10
11
12
13
14
28
27
26
25
24
23
22
21
20
19
18
17
16
15
PA0
PA1
PA3
PA2 (IR)
PB7
PB6
GND
NC
VCC
PB5
PB4 (INT1)
PB3 (INT0)
PB2 (T0)
PB1 (AIN1)
PD3
PD4
NC
VCC
GND
NC
XTAL1
XTAL2
TQFP/MLF
PD2
PD1
32313029282726
1
2
3
4
5
6
7
8
9101112131415
PD5
PD6
PD0
RESET
PD7
(AIN0) PB0
PA0
PA1
PA3
(T0) PB2
(INT0) PB3
(AIN1) PB1
PA2 (IR)
25
24
23
22
21
20
19
18
17
16
(INT1) PB4
PB7
PB6
NC
GND
NC
NC
VCC
PB5
Rev. 1062E–10/01
1
Page 2
Description The ATtiny28 is a low-power CMOS 8-bit microcontroller based on the AVR RISC archi-
tecture. By executing powerful instructions in a single clock cycle, the ATtiny28 achieves
throughputs approaching 1 MIPS per MHz, allowing the system designer to optimize
power consumption versus processing speed. The AVR core combines a rich instruction
set with 32 general-purpose working registers. All the 32 registers are directly connected to the Arithmetic Logic Unit (ALU), allowing two independent registers to be
accessed in one single instruction executed in one clock cycle. The resulting architecture is more code efficient while achieving throughputs up to ten times faster than
conventional CISC microcontrollers.
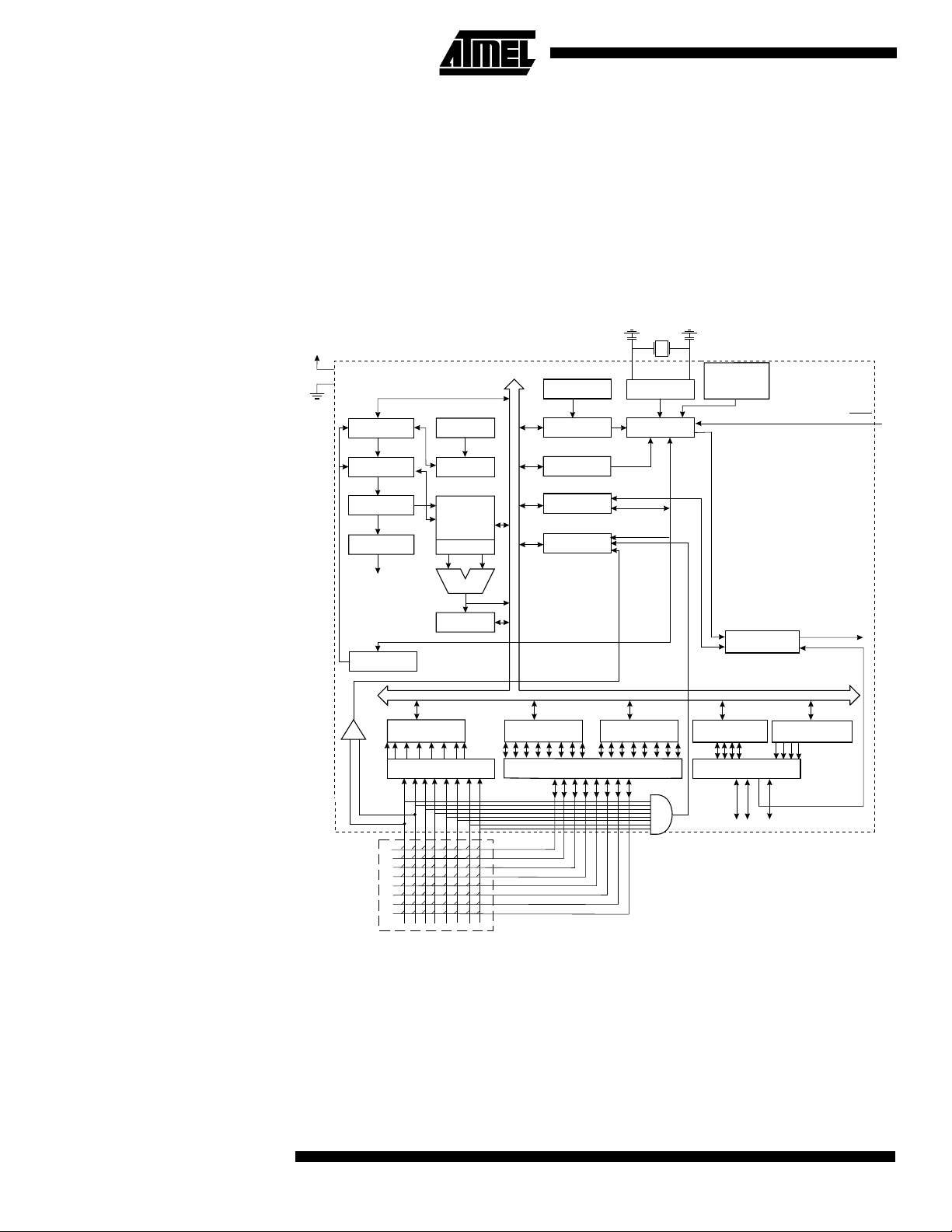
Block Diagram Figure 1. The ATtiny28 Block Diagram
VCC
GND
PROGRAM
COUNTER
PROGRAM
FLASH
INSTRUCTION
REGISTER
INSTRUCTION
DECODER
CONTROL
LINES
PROGRAMMING
LOGIC
DATA REGISTER
+
-
ANALOG
COMPARATOR
PORTB
STACK
POINTER
HARDWARE
STACK
GENERAL
PURPOSE
REGISTERS
STATUS
REGISTER
PORTB
8-BIT DATA BUS
Z
ALU
INTERNAL
OSCILLATOR
WATCHDOG
MCU CONTROL
REGISTER
TIMER/
COUNTER
INTERRUPT
DATA REGISTER
PORTD
TIMER
UNIT
PORTD
OSCILLATOR
TIMING AND
CONTROL
DATA DIR
REG. PORTD
XTAL2XTAL1
INTERNAL
CALIBRATED
OSCILLATOR
HARDWARE
MODULATOR
DATA REGISTER
PORTA
PORTA
PORTA CONTROL
REGISTER
RESET
The ATtiny28 provides the following features: 2K bytes of Flash, 11 general-purpose I/O
lines, 8 input lines, a high-current LED driver, 32 general-purpose working registers, an
8-bit timer/counter, internal and external interrupts, programmable Watchdog Timer with
internal oscillator and 2 software-selectable power-saving modes. The Idle Mode stops
the CPU while allowing the timer/counter and interrupt system to continue functioning.
The Power-down mode saves the register contents but freezes the oscillator, disabling
all other chip functions until the next interrupt or hardware reset. The wake-up or inter-
2
ATtiny28L/V
1062E–10/01
Page 3

ATtiny28L/V
rupt on low-level input feature enables the ATtiny28 to be highly responsive to external
events, still featuring the lowest power consumption while in the power-down modes.
The device is manufactured using Atmel’s high-density, nonvolatile memory technology.
By combining an enhanced RISC 8-bit CPU with Flash on a monolithic chip, the Atmel
ATtiny28 is a powerful microcontroller that provides a highly flexible and cost-effective
solution to many embedded control applications. The ATtiny28 AVR is supported with a
full suite of program and system development tools including: macro assemblers, program debugger/simulators, in-circuit emulators and evaluation kits.
Pin Descriptions
VCC Supply voltage pin.
GND Ground pin.
Port A (PA3..PA0) Port A is a 4-bit I/O port. PA2 is output-only and can be used as a high-current LED
driver. At V
bi-directional I/O pins with internal pull-ups (selected for each bit). The port pins are tristated when a reset condition becomes active, even if the clock is not running.
= 2.0V, the PA2 output buffer can sink 25 mA. PA3, PA1 and PA0 are
CC
Port B (PB7..PB0) Port B is an 8-bit input port with internal pull-ups (selected for all Port B pins). Port B
pins that are externally pulled low will source current if the pull-ups are activated.
Port B also serves the functions of various special features of the ATtiny28 as listed on
page 39. If any of the special features are enabled, the pull-up(s) on the corresponding
pin(s) is automatically disabled. The port pins are tri-stated when a reset condition
becomes active, even if the clock is not running.
Port D (PD7..PD0) Port D is an 8-bit I/O port. Port pins can provide internal pull-up resistors (selected for
each bit). The port pins are tri-stated when a reset condition becomes active, even if the
clock is not running.
XTAL1 Input to the inverting oscillator amplifier and input to the internal clock operating circuit.
XTAL2 Output from the inverting oscillator amplifier.
RESET
Reset input. An external reset is generated by a low level on the RESET pin. Reset
pulses longer than 50 ns will generate a reset, even if the clock is not running. Shorter
pulses are not guaranteed to generate a reset.
1062E–10/01
3
Page 4
Clock Options The device has the following clock source options, selectable by Flash Fuse bits as
shown in Table 1.
Table 1. Device Clocking Option Select
Clock Option CKSEL3..0
External Crystal/Ceramic Resonator 1111 - 1010
External Low-frequency Crystal 1001 - 1000
External RC Oscillator 0111 - 0101
Internal RC Oscillator 0100 - 0010
External Clock 0001 - 0000
Note: “1” means unprogrammed, “0” means programmed.
The various choices for each clocking option give different start-up times as shown in
Table 5 on page 14.
Internal RC Oscillator The internal RC oscillator option is an on-chip calibrated oscillator running at a nominal
frequency of 1.2 MHz. If selected, the device can operate with no external components.
The device is shipped with this option selected.
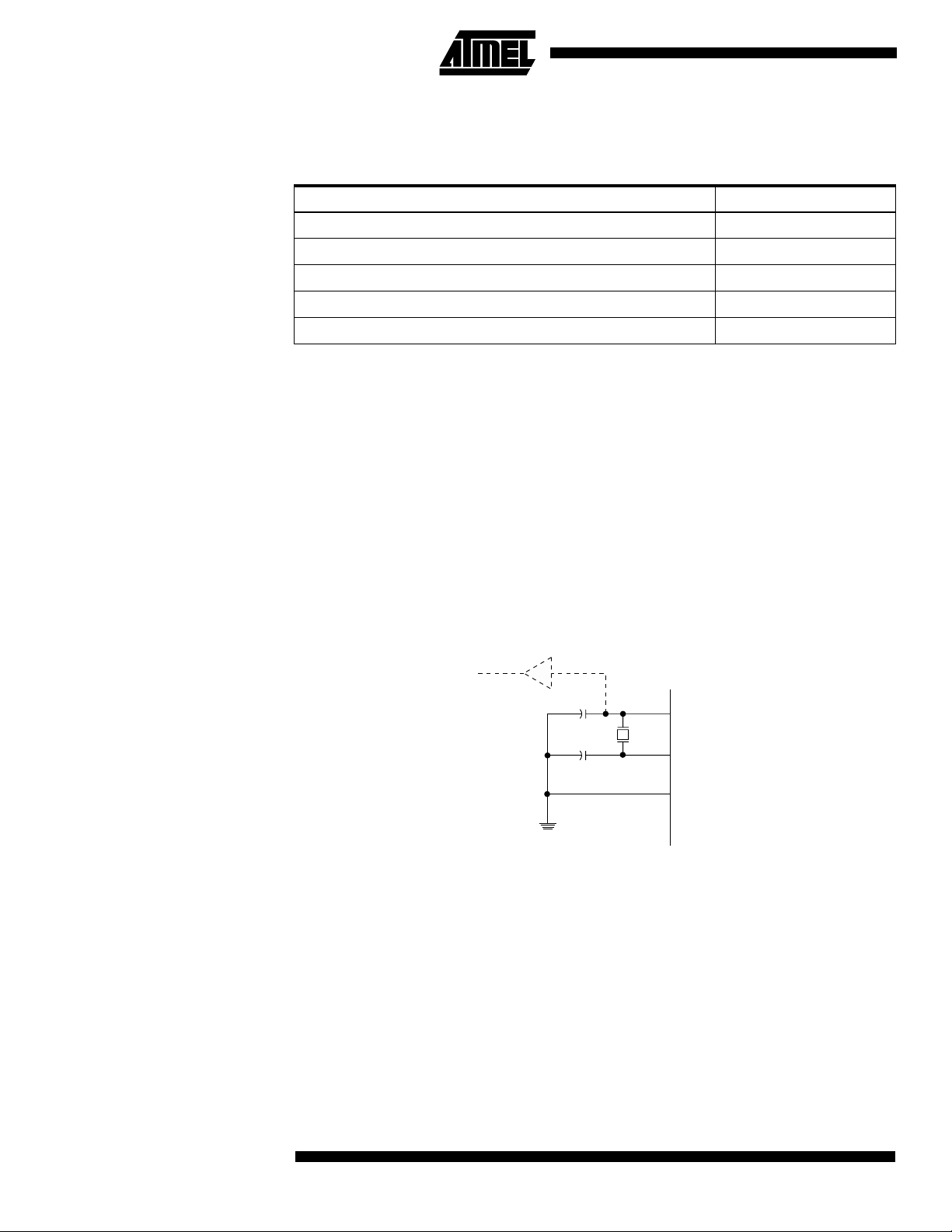
Crystal Oscillator XTAL1 and XTAL2 are input and output, respectively, of an inverting amplifier, which
can be configured for use as an on-chip oscillator, as shown in Figure 2. Either a quartz
crystal or a ceramic resonator may be used. When the INTCAP fuse is programmed,
internal load capacitors with typical values 50 pF are connected between XTAL1/XTAL2
and ground.
Figure 2. Oscillator Connections
MAX 1 HC BUFFER
HC
C2
C1
Note: 1. When using the MCU oscillator as a clock for an external device, an HC buffer should
be connected as indicated in the figure.
XTAL2
XTAL1
GND
4
ATtiny28L/V
1062E–10/01
Page 5
ATtiny28L/V
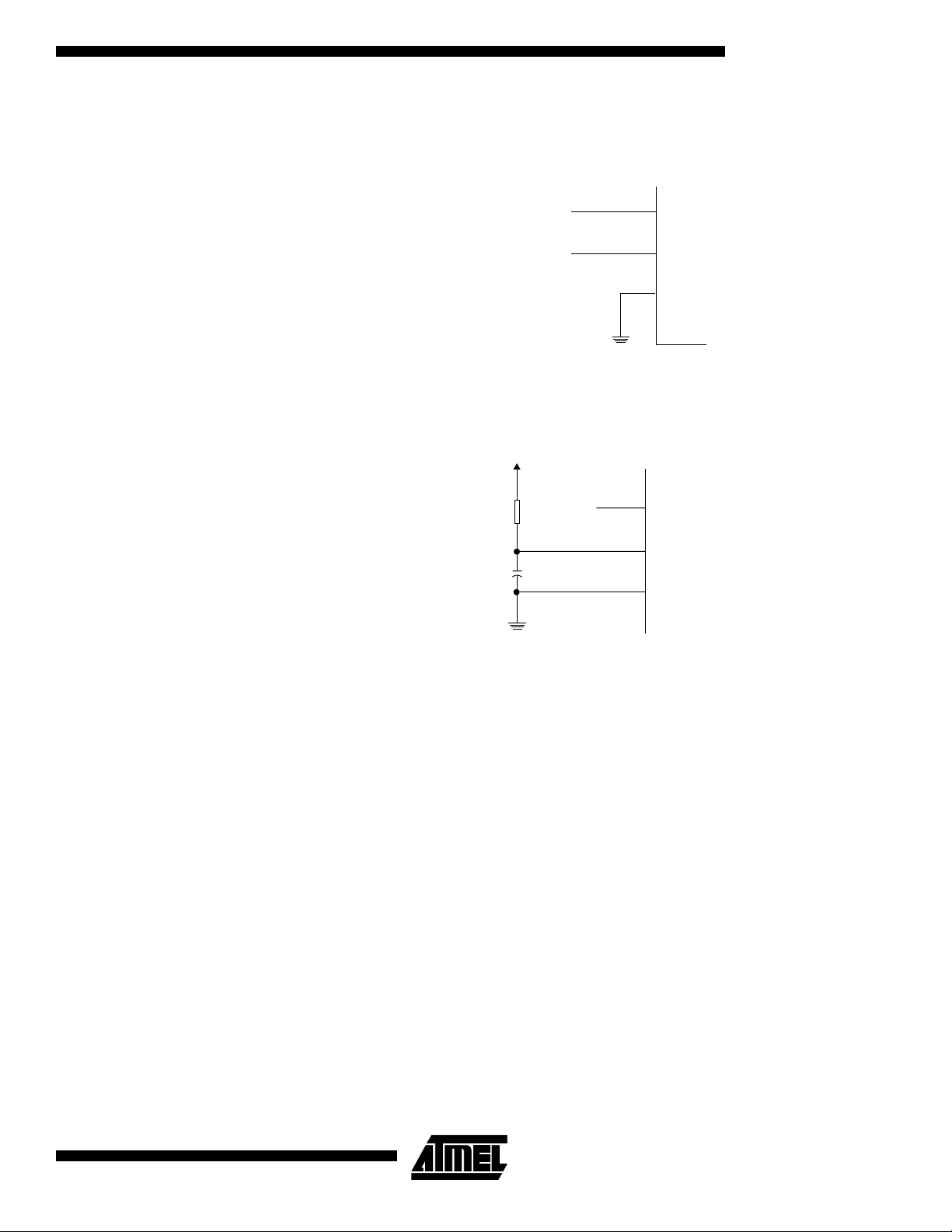
External Clock To drive the device from an external clock source, XTAL2 should be left unconnected
while XTAL1 is driven as shown in Figure 3.
Figure 3. External Clock Drive Configuration
NC
EXTERNAL
OSCILLATOR
SIGNAL
XTAL2
XTAL1
GND
External RC Oscillator For timing insensitive applications, the external RC configuration shown in Figure 4 can
be used. For details on how to choose R and C, see Table 25 on page 54.
Figure 4. External RC Configuration
V
CC
R
C
NC
XTAL2
XTAL1
GND
1062E–10/01
5
Page 6
Architectural Overview
The fast-access register file concept contains 32 x 8-bit general-purpose working registers with a single clock cycle access time. This means that during one single clock cycle,
one ALU (Arithmetic Logic Unit) operation is executed. Two operands are output from
the register file, the operation is executed, and the result is stored back in the register
file – in one clock cycle.
Two of the 32 registers can be used as a 16-bit pointer for indirect memory access. This
pointer is called the Z-pointer and can address the register file and the Flash program
memory.
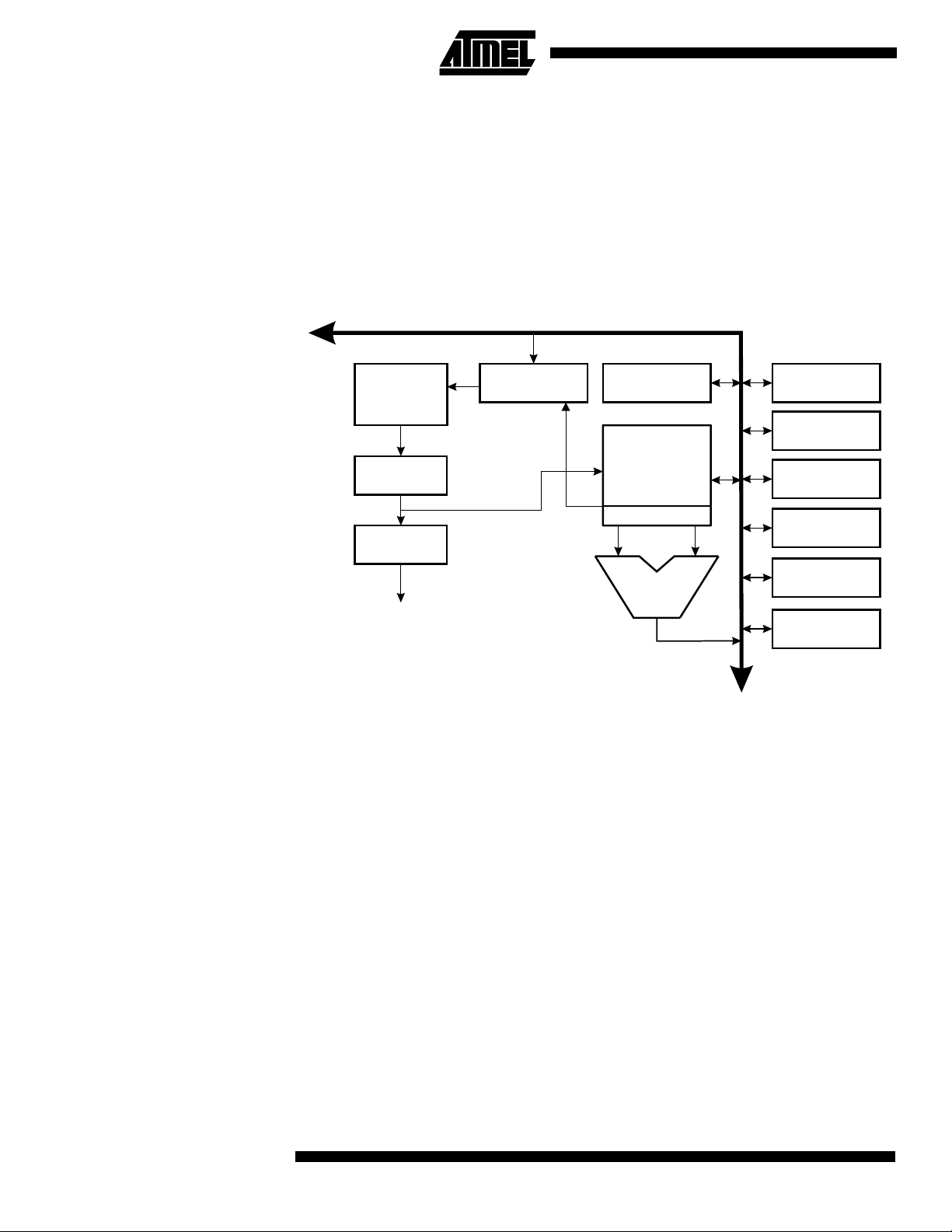
Figure 5. The ATtiny28 AVR RISC Architecture
Data Bus 8-bit
1K x 16
Program
Flash
Instruction
Register
Instruction
Decoder
Control Lines
Program
Counter
Status
and Test
32 x 8
General
Purpose
Registrers
Z
ALU
Control
Registrers
Interrupts
Unit
8-bit
Timer/Counter
Watchdog
Timer
Analog
Comparator
20
I/O Lines
The ALU supports arithmetic and logic functions between registers or between a constant and a register. Single register operations are also executed in the ALU. Figure 5
shows the ATtiny28 AVR RISC microcontroller architecture. The AVR uses a Harvard
architecture concept – with separate memories and buses for program and data memories. The program memory is accessed with a two-stage pipeline. While one instruction
is being executed, the next instruction is pre-fetched from the program memory. This
concept enables instructions to be executed every clock cycle. The program memory is
reprogrammable Flash memory.
With the relative jump and relative call instructions, the whole 1K address space is
directly accessed. All AVR instructions have a single 16-bit word format, meaning that
every program memory address contains a single 16-bit instruction.
During interrupts and subroutine calls, the return address program counter (PC) is
stored on the stack. The stack is a 3-level-deep hardware stack dedicated for subroutines and interrupts.
The I/O memory space contains 64 addresses for CPU peripheral functions such as
Control Registers, Timer/Counters and other I/O functions. The memory spaces in the
AVR architecture are all linear and regular memory maps.
A flexible interrupt module has its control registers in the I/O space with an additional
global interrupt enable bit in the status register. All the different interrupts have a sepa-
6
ATtiny28L/V
1062E–10/01
Page 7
ATtiny28L/V
rate interrupt vector in the interrupt vector table at the beginning of the
program memory. The different interrupts have priority in accordance with their interrupt
vector position. The lower the interrupt vector address, the higher the priority.
General-purpose Register File
Figure 6 shows the structure of the 32 general-purpose registers in the CPU.
Figure 6. AVR
CPU General-purpose Working Registers
70
R0
R1
R2
General …
Purpose …
Working R28
Registers R29
R30 (Z-Register low byte)
R31(Z-Register high byte)
All the register operating instructions in the instruction set have direct and single cycle
access to all registers. The only exception are the five constant arithmetic and logic
instructions SBCI, SUBI, CPI, ANDI and ORI between a constant and a register and the
LDI instruction for load immediate constant data. These instructions apply to the second
half of the registers in the register file – R16..R31. The general SBC, SUB, CP, AND,
OR and all other operations between two registers or on a single register apply to the
entire register file.
Registers 30 and 31 form a 16-bit pointer (the Z-pointer), which is used for indirect Flash
memory and register file access. When the register file is accessed, the contents of R31
are discarded by the CPU.
ALU – Arithmetic Logic Unit
Downloadable Flash Program Memory
Program and Data Addressing Modes
The high-performance AVR ALU operates in direct connection with all the 32 generalpurpose working registers. Within a single clock cycle, ALU operations between registers in the register file are executed. The ALU operations are divided into three main
categories – arithmetic, logic and bit functions. Some microcontrollers in the AVR product family feature a hardware multiplier in the arithmetic part of the ALU.
The ATtiny28 contains 2K bytes of on-chip Flash memory for program storage. Since all
instructions are single 16-bit words, the Flash is organized as 1K x 16 words. The Flash
memory has an endurance of at least 1,000 write/erase cycles.
The ATtiny28 program counter is 10 bits wide, thus addressing the 1K word Flash program memory. See page 44 for a detailed description of Flash data downloading.
The ATtiny28 AVR RISC microcontroller supports powerful and efficient addressing
modes. This section describes the different addressing modes supported in the
ATtiny28. In the figures, OP means the operation code part of the instruction word. To
simplify, not all figures show the exact location of the addressing bits.
1062E–10/01
7
Page 8
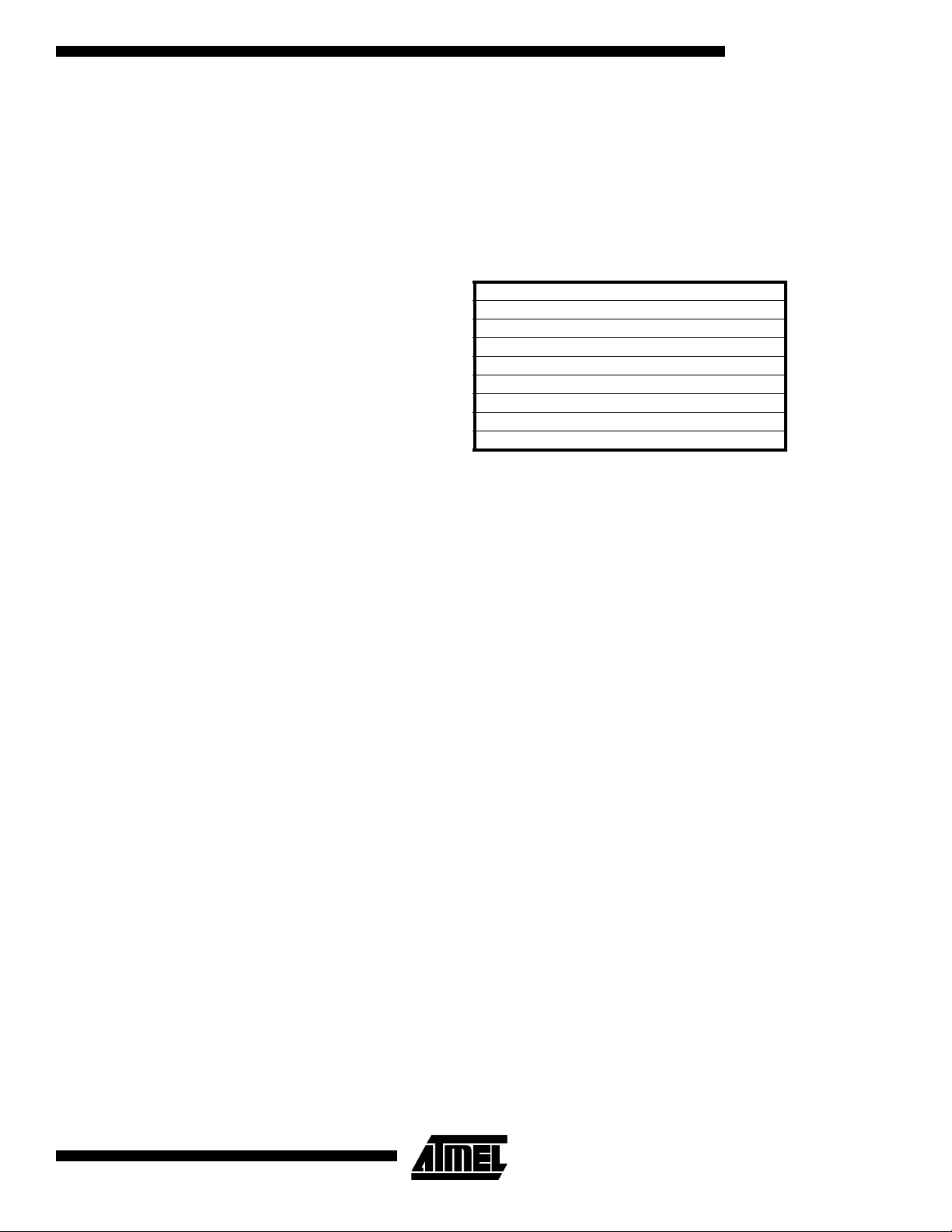
Register Direct, Single
Figure 7. Direct Single Register Addressing
Register Rd
The operand is contained in register d (Rd).
Register Indirect Figure 8. Indirect Register Addressing
Register Direct, Two Registers Rd and Rr
REGISTERFILE
Z-Register
0
30
31
The register accessed is the one pointed to by the Z-register (R31, R30).
Figure 9. Direct Register Addressing, Two Registers
Operands are contained in register r (Rr) and d (Rd). The result is stored in register d
(Rd).
8
ATtiny28L/V
1062E–10/01
Page 9
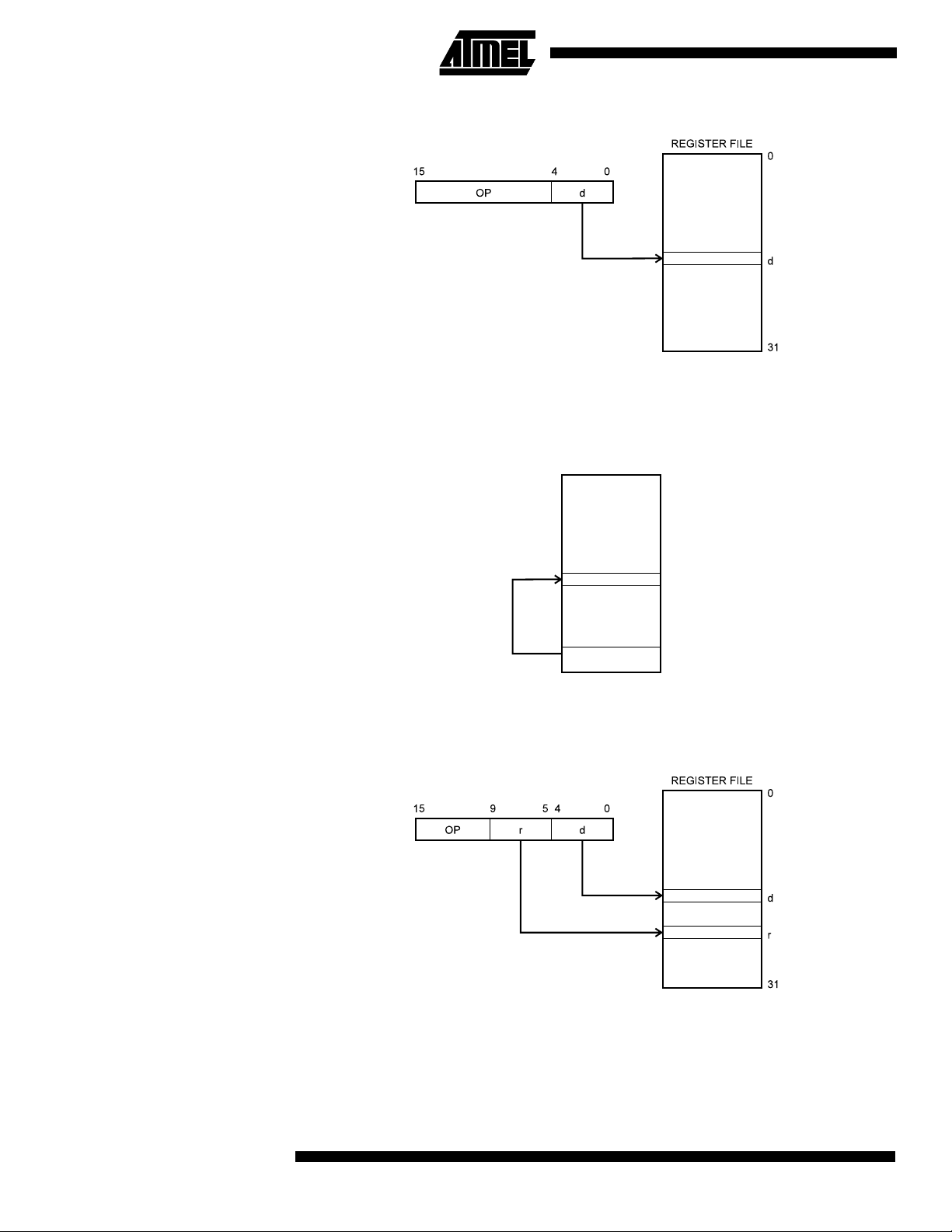
I/O Direct Figure 10. I/O Direct Addressing
Operand address is contained in six bits of the instruction word. n is the destination or
source register address.
ATtiny28L/V
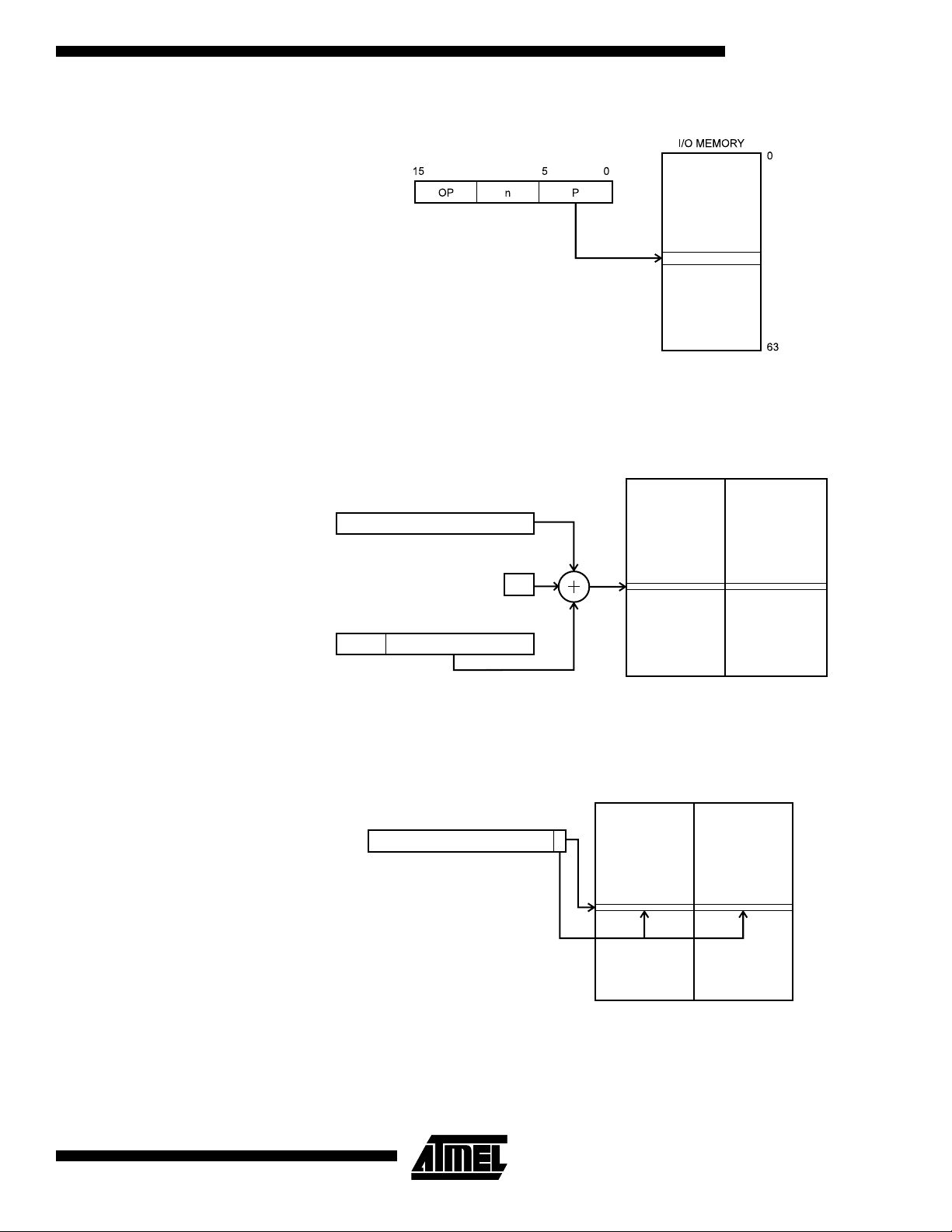
Relative Program Addressing, RJMP and RCALL
Constant Addressing Using the LPM Instruction
Figure 11. Relative Program Memory Addressing
15 0
PC
+1
15 012 11
OP
k
PROGRAM MEMORY
$000
$3FF
Program execution continues at address PC + k + 1. The relative address k is -2048 to
2047.
Figure 12. Code Memory Constant Addressing
PROGRAM MEMORY
15 1 0
Z-REGISTER
$000
1062E–10/01
$3FF
Constant byte address is specified by the Z-register contents. The 15 MSBs select word
address (0 - 1K), and LSB selects low byte if cleared (LSB = 0) or high byte if set (LSB =
1).
9
Page 10
Subroutine and Interrupt Hardware Stack
The ATtiny28 uses a 3-level-deep hardware stack for subroutines and interrupts. The
hardware stack is 10 bits wide and stores the program counter (PC) return address
while subroutines and interrupts are executed.
RCALL instructions and interrupts push the PC return address onto stack level 0, and
the data in the other stack levels 1 - 2 are pushed one level deeper in the stack. When a
RET or RETI instruction is executed the returning PC is fetched from stack level 0, and
the data in the other stack levels 1 - 2 are popped one level in the stack.
If more than three subsequent subroutine calls or interrupts are executed, the first values written to the stack are overwritten.
Memory Access and Instruction Execution Timing
This section describes the general access timing concepts for instruction execution and
internal memory access.
The AVR CPU is driven by the System Clock, directly generated from the external clock
crystal for the chip. No internal clock division is used.
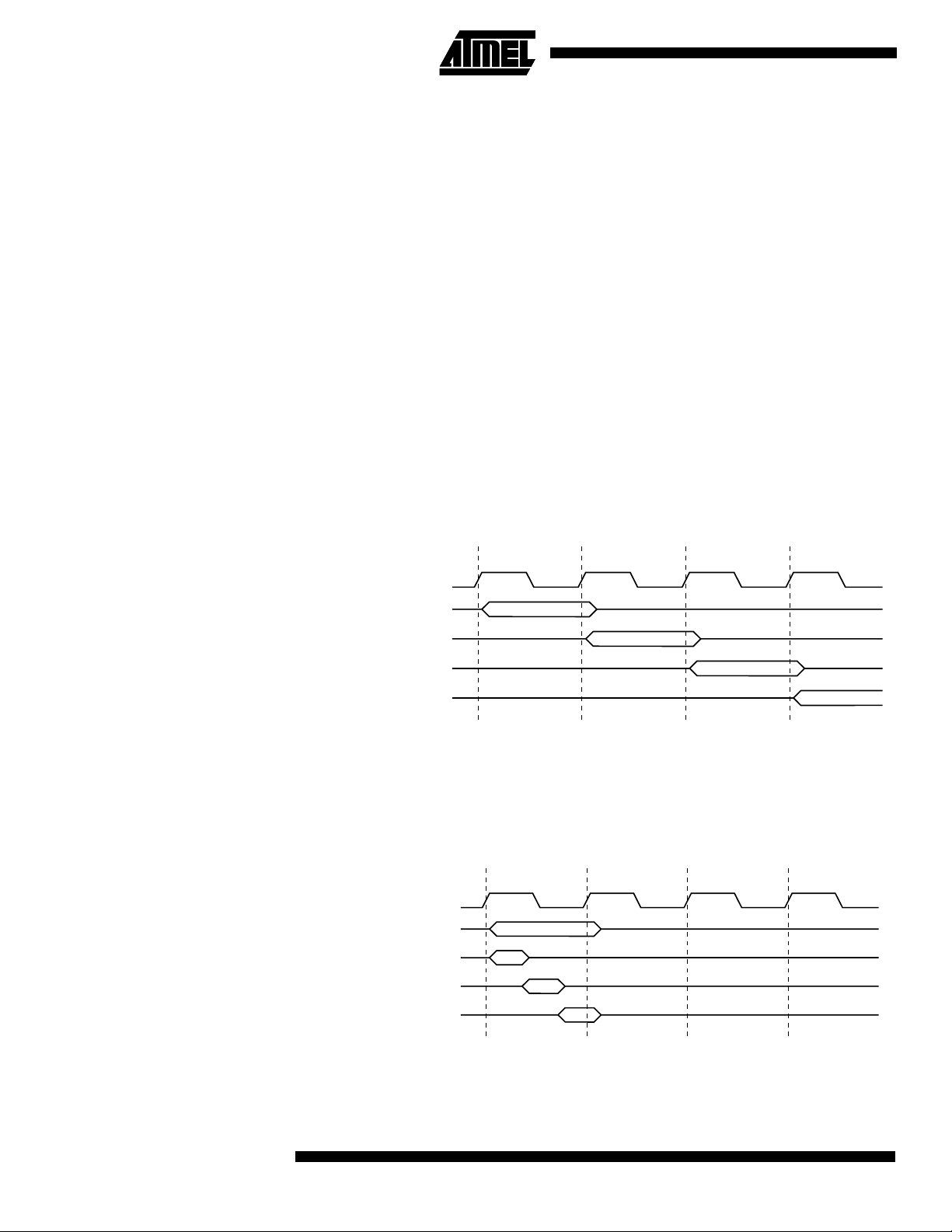
Figure 13 shows the parallel instruction fetches and instruction executions enabled by
the Harvard architecture and the fast-access register file concept. This is the basic pipelining concept to obtain up to 1 MIPS per MHz with the corresponding unique results for
functions per cost, functions per clocks and functions per power unit.
Figure 13. The Parallel Instruction Fetches and Instruction Executions
T1 T2 T3 T4
System Clock Ø
1st Instruction Fetch
1st Instruction Execute
2nd Instruction Fetch
2nd Instruction Execute
3rd Instruction Fetch
3rd Instruction Execute
4th Instruction Fetch
Figure 14 shows the internal timing concept for the register file. In a single clock cycle
an ALU operation using two register operands is executed, and the result is stored back
to the destination register.
10
Figure 14. Single Cycle ALU Operation
T1 T2 T3 T4
System Clock Ø
Total Execution Time
Register Operands Fetch
ALU Operation Execute
Result Write Back
ATtiny28L/V
1062E–10/01
Page 11
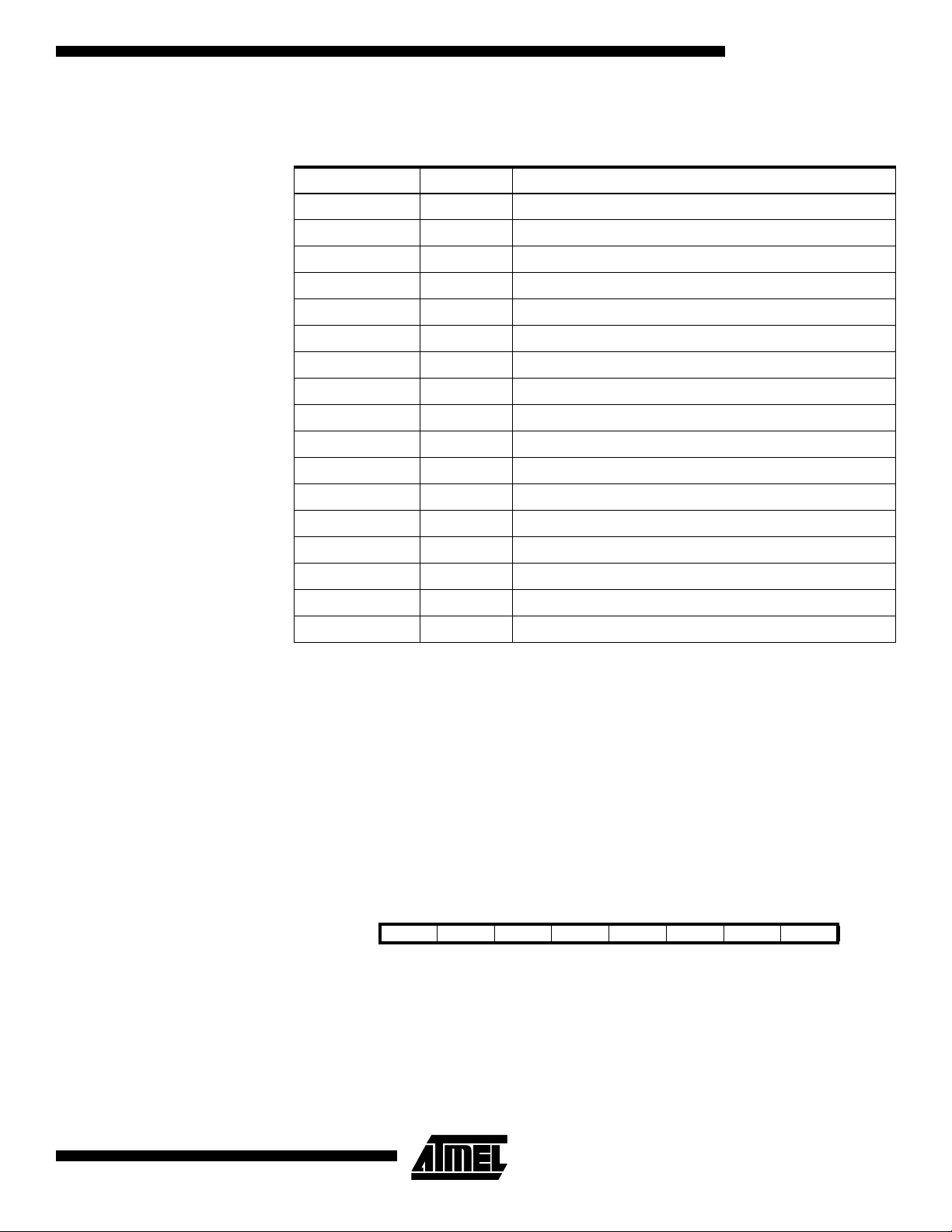
I/O Memory The I/O space definition of the ATtiny28 is shown in Table 2.
Table 2. ATtiny28 I/O Space
Address Hex Name Function
$3F SREG Status Register
$1B PORTA Data Register, Port A
$1A PACR Port A Control Register
$19 PINA Input Pins, Port A
$16 PINB Input Pins, Port B
$12 PORTD Data Register, Port D
$11 DDRD Data Direction Register, Port D
$10 PIND Input Pins, Port D
$08 ACSR Analog Comparator Control and Status Register
$07 MCUCS MCU Control and Status Register
$06 ICR Interrupt Control Register
$05 IFR Interrupt Flag Register
ATtiny28L/V
$04 TCCR0 Timer/Counter0 Control Register
$03 TCNT0 Timer/Counter0 (8-bit)
$02 MODCR Modulation Control Register
$01 WDTCR Watchdog Timer Control Register
$00 OSCCAL Oscillator Calibration Register
Note: Reserved and unused locations are not shown in the table.
All ATtiny28 I/O and peripherals are placed in the I/O space. The I/O locations are
accessed by the IN and OUT instructions transferring data between the 32 general-purpose working registers and the I/O space. I/O registers within the address range $00 $1F are directly bit-accessible using the SBI and CBI instructions. In these registers, the
value of single bits can be checked by using the SBIS and SBIC instructions. Refer to
the Instruction Set section for more details.
For compatibility with future devices, reserved bits should be written to zero if accessed.
Reserved I/O memory addresses should never be written.
The I/O and peripherals control registers are explained in the following sections.
Status Register – SREG The AVR status register (SREG) at I/O space location $3F is defined as:
Bit 76543210
$3F I T H S V N Z C SREG
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value00000000
1062E–10/01
• Bit 7 – I: Global Interrupt Enable
The global interrupt enable bit must be set (one) for the interrupts to be enabled. The
individual interrupt enable control is then performed in separate control registers. If the
global interrupt enable register is cleared (zero), none of the interrupts are enabled independent of the individual interrupt enable settings. The I-bit is cleared by hardware after
11
Page 12

an interrupt has occurred, and is set by the RETI instruction to enable subsequent
interrupts.
• Bit 6 – T: Bit Copy Storage
The bit copy instructions BLD (Bit LoaD) and BST (Bit STore) use the T-bit as source
and destination for the operated bit. A bit from a register in the register file can be copied
into T by the BST instruction, and a bit in T can be copied into a bit in a register in the
register file by the BLD instruction.
• Bit 5 – H: Half-carry Flag
The half-carry flag H indicates a half-carry in some arithmetic operations. See the
Instruction Set description for detailed information.
• Bit 4 – S: Sign Bit, S = N
The S-bit is always an exclusive or between the negative flag N and the two’s complement overflow flag V. See the Instruction Set description for detailed information.
• Bit 3 – V: Two’s Complement Overflow Flag
The two’s complement overflow flag V supports two’s complement arithmetic. See the
Instruction Set description for detailed information.
• Bit 2 – N: Negative Flag
The negative flag N indicates a negative result from an arithmetical or logical operation.
See the Instruction Set description for detailed information.
• Bit 1 – Z: Zero Flag
⊕ V
Reset and Interrupt Handling
The zero flag Z indicates a zero result from an arithmetical or logical operation. See the
Instruction Set description for detailed information.
• Bit 0 – C: Carry Flag
The carry flag C indicates a carry in an arithmetical or logical operation. See the Instruction Set description for detailed information.
Note that the status register is not automatically stored when entering an interrupt routine and restored when returning from an interrupt routine. This must be handled by
software.
The ATtiny28 provides five different interrupt sources. These interrupts and the reset
vector each have a separate program vector in the program memory space. All the interrupts are assigned to individual enable bits. In order to enable the interrupt, both the
individual enable bit and the I-bit in the status register (SREG) must be set to one.
The lowest addresses in the program memory space are automatically defined as the
Reset and Interrupt vectors. The complete list of vectors is shown in Table 3. The list
also determines the priority levels of the different interrupts. The lower the address, the
higher the priority level. RESET has the highest priority, and next is INT0 – the External
Interrupt Request 0.
12
ATtiny28L/V
1062E–10/01
Page 13
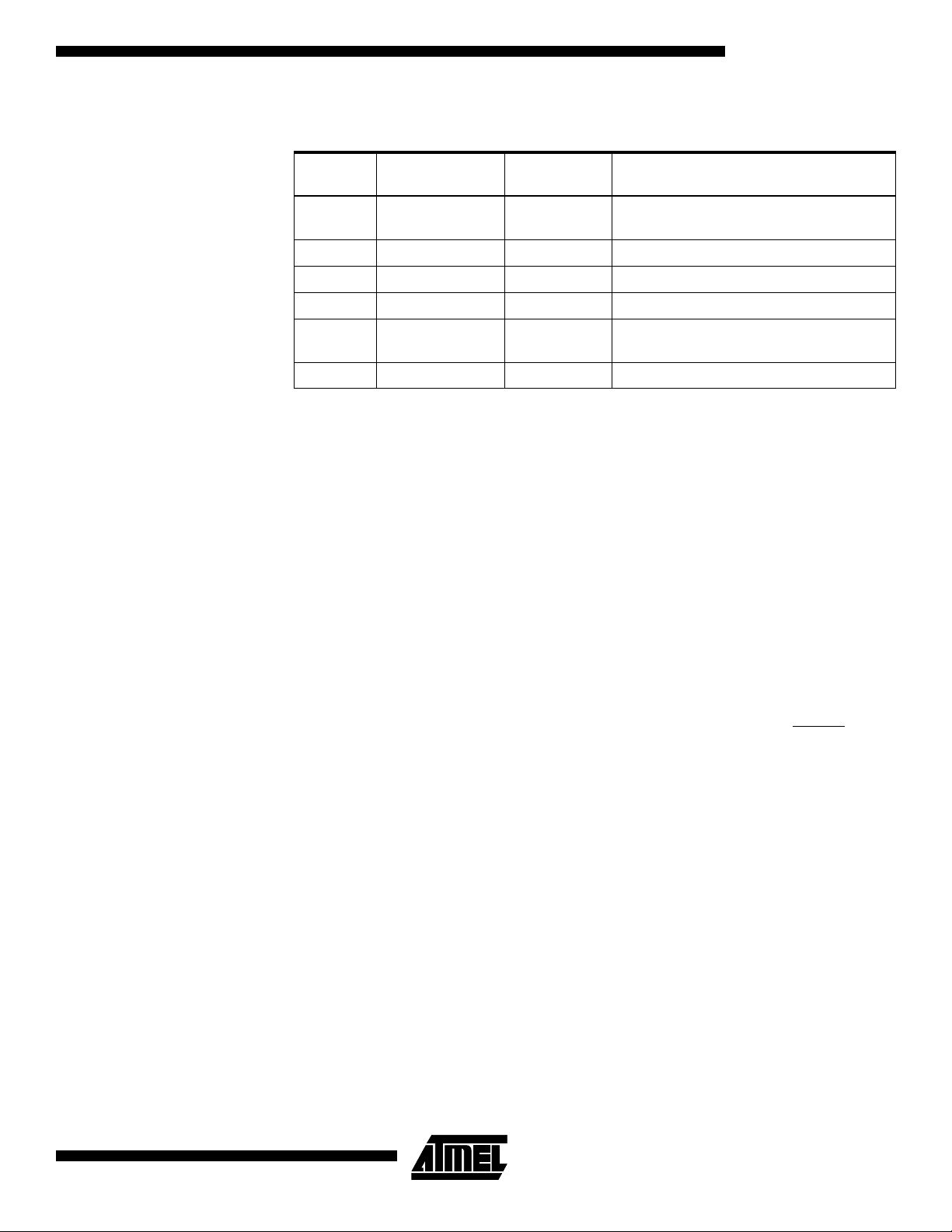
Table 3. Reset and Interrupt Vectors
ATtiny28L/V
Vector
No.
1 $000 RESET
2 $001 INT0 External Interrupt Request 0
3 $002 INT1 External Interrupt Request 1
4 $003 Input Pins Low-level Input on Port B
5 $004
6 $005 ANA_COMP Analog Comparator
Program
Address Source Interrupt Definition
Hardware Pin, Power-on Reset and
Watchdog Reset
TIMER0,
OVF0
Timer/Counter0 Overflow
The most typical and general program setup for the Reset and Interrupt vector
addresses are:
Address Labels Code Comments
$000 rjmp RESET ; Reset handler
$001 rjmp EXT_INT0 ; IRQ0 handler
$002 rjmp EXT_INT1 ; IRQ1 handler
$003 rjmp LOW_LEVEL ; Low level input handler
$004 rjmp TIM0_OVF ; Timer0 overflow handle
$005 rjmp ANA_COMP ; Analog Comparator handle
;
$006 MAIN: <instr> xxx ; Main program start
…… ……
Reset Sources The ATtiny28 provides three sources of reset:
• Power-on Reset. The MCU is reset when the supply voltage is below the Power-on
Reset threshold (V
POT
).
• External Reset. The MCU is reset when a low level is present on the RESET pin for
more than 50 ns.
• Watchdog Reset. The MCU is reset when the Watchdog Timer period expires and
the Watchdog is enabled.
During reset, all I/O registers are then set to their initial values and the program starts
execution from address $000. The instruction placed in address $000 must be an RJMP
(relative jump) instruction to the reset handling routine. If the program never enables an
interrupt source, the interrupt vectors are not used, and regular program code can be
placed at these locations. The circuit diagram in Figure 15 shows the reset logic. Table 4
defines the timing and electrical parameters of the reset circuitry.
1062E–10/01
13
Page 14
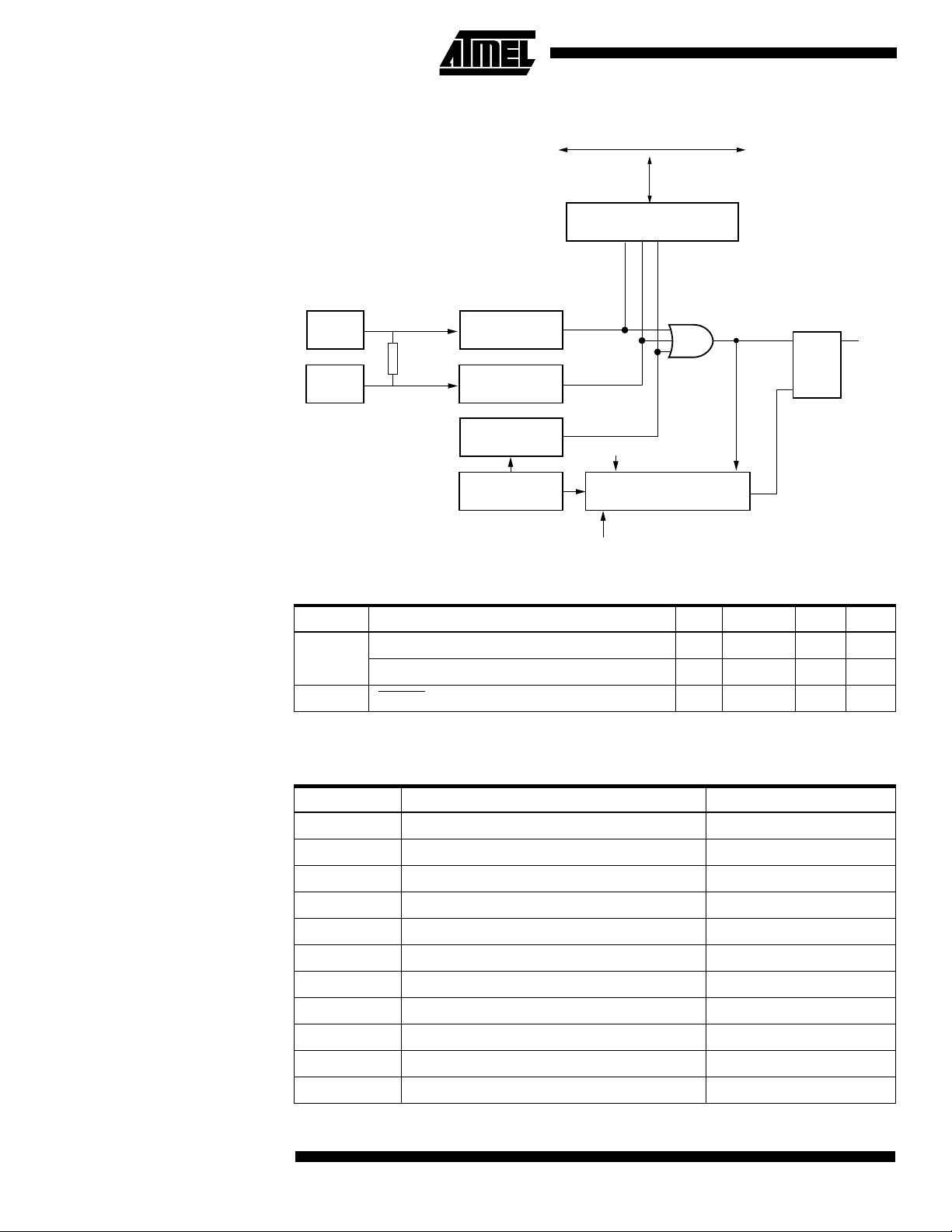
Figure 15. Reset Logic
DATA BUS
MCU Control and Status
Register (MCUCS)
PORF
WDRF
EXTRF
VCC
100 - 500K
RESET
Power-on
Reset Circuit
Reset Circuit
SRQ
Watchdog
Timer
CKSEL[3..0]
COUNTER RESET
On-chip
RC Oscillator
Delay Counters
Full
CK
Table 4. Reset Characteristics
Symbol Parameter Min Typ Max Unit
(1)
V
POT
V
RST
Power-on Reset Threshold Voltage (rising) 1.0 1.4 1.8 V
Power-on Reset Threshold Voltage (falling) 0.4 0.6 0.8 V
RESET Pin Threshold Voltage 0.6 V
CC
Note: 1. The Power-on Reset will not work unless the supply voltage has been below V
(falling).
INTERNAL RESET
V
POT
14
ATtiny28L/V
Table 5. ATtiny28 Clock Options and Start-up Time
CKSEL3..0 Clock Source Start-up Time at 2.7V
1111 External Crystal/Ceramic Resonator
1110 External Crystal/Ceramic Resonator
1101 External Crystal/Ceramic Resonator
1100 External Crystal/Ceramic Resonator 16K CK
1011 External Crystal/Ceramic Resonator 4.2 ms + 16K CK
1010 External Crystal/Ceramic Resonator 67 ms + 16K CK
1001 External Low-frequency Crystal 67 ms + 1K CK
1000 External Low-frequency Crystal 67 ms + 32K CK
0111 External RC Oscillator 6 CK
0110 External RC Oscillator 4.2 ms + 6 CK
0101 External RC Oscillator 67 ms + 6 CK
(1)
(1)
(1)
1K CK
4.2 ms + 1K CK
67 ms + 1K CK
1062E–10/01
Page 15
ATtiny28L/V
Table 5. ATtiny28 Clock Options and Start-up Time (Continued)
CKSEL3..0 Clock Source Start-up Time at 2.7V
0100 Internal RC Oscillator 6 CK
0011 Internal RC Oscillator 4.2 ms + 6 CK
0010 Internal RC Oscillator 67 ms + 6 CK
0001 External Clock 6 CK
0000 External Clock 4.2 ms + 6 CK
Note: 1. Due to limited number of clock cycles in the start-up period, it is recommended that
ceramic resonator be used.
This table shows the start-up times from reset. From Power-down mode, only the clock
counting part of the start-up time is used. The Watchdog oscillator is used for timing the
real-time part of the start-up time. The number WDT oscillator cycles used for each
time-out is shown in Table 6.
Table 6. Number of Watchdog Oscillator Cycles
Time-out Number of Cycles
4.2 ms 1K
67 ms 16K
The frequency of the Watchdog oscillator is voltage-dependent, as shown in the section
“Typical Characteristics” on page 55.
The device is shipped with CKSEL = 0010.
Power-on Reset A Power-on Reset (POR) pulse is generated by an on-chip detection circuit. The detec-
tion level is nominally 1.4V. The POR is activated whenever V
is below the detection
CC
level. The POR circuit can be used to trigger the start-up reset, as well as detect a failure in supply voltage.
The Power-on Reset (POR) circuit ensures that the device is reset from power-on.
Reaching the Power-on Reset threshold voltage invokes a delay counter, which determines the delay for which the device is kept in RESET after V
rise. The time-out
CC
period of the delay counter can be defined by the user through the CKSEL fuses. The
different selections for the delay period are presented in Table 5. The RESET signal is
activated again, without any delay, when the V
decreases below detection level. See
CC
Figure 16.
If the built-in start-up delay is sufficient, RESET
an external pull-up resistor. By holding the RESET
can be connected to VCC directly or via
pin low for a period after VCC has
been applied, the Power-on Reset period can be extended. Refer to Figure 17 for a timing example of this.
1062E–10/01
15
Page 16
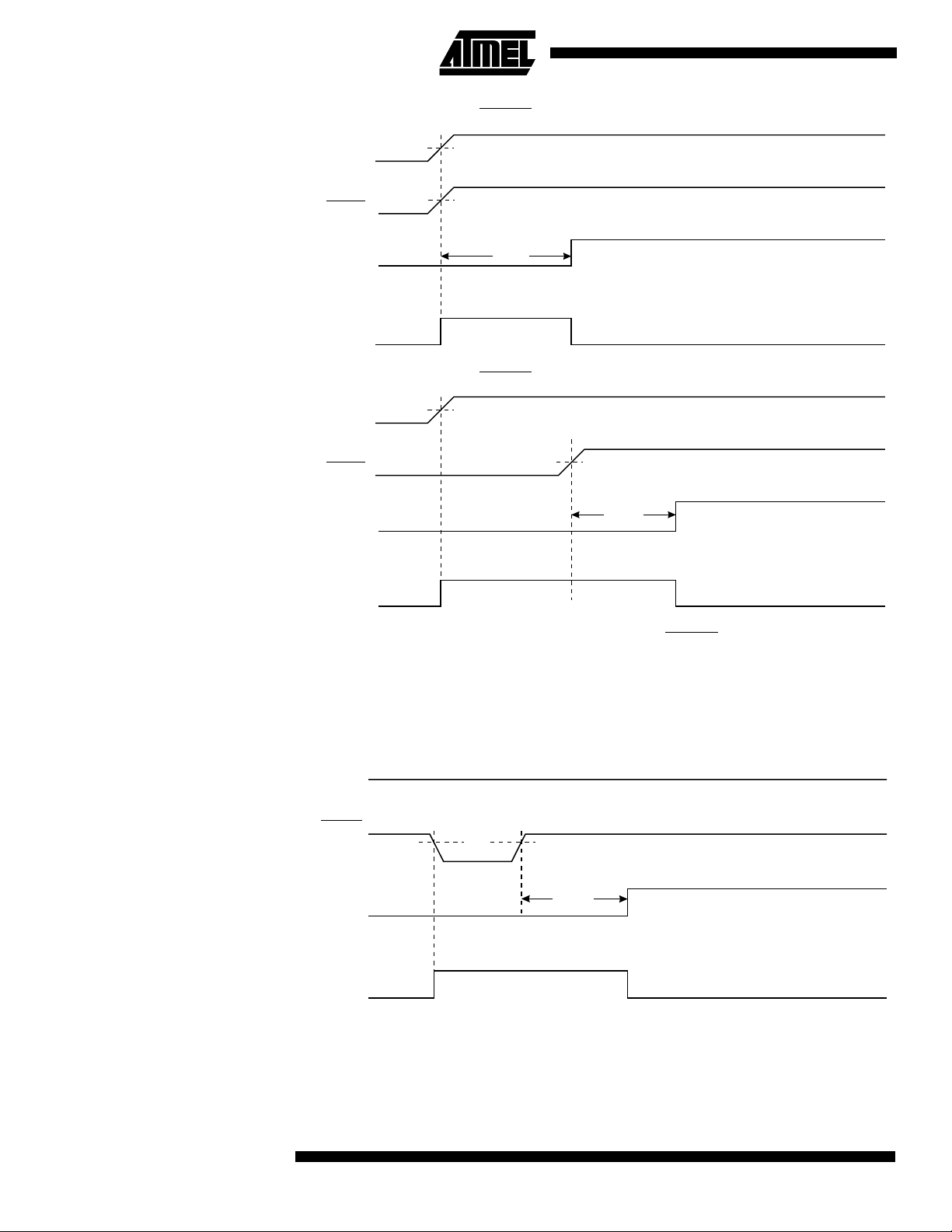
Figure 16. MCU Start-up, RESET Tied to VCC.
V
VCC
RESET
TIME-OUT
INTERNAL
RESET
POT
V
RST
t
TOUT
Figure 17. MCU Start-up, RESET
V
VCC
RESET
TIME-OUT
INTERNAL
RESET
POT
Controlled Externally
V
RST
t
TOUT
External Reset An external reset is generated by a low level on the RESET
than 50 ns will generate a reset, even if the clock is not running. Shorter pulses are not
guaranteed to generate a reset. When the applied voltage reaches the Reset Threshold
Voltage (V
period (t
) on its positive edge, the delay timer starts the MCU after the Time-out
RST
) has expired.
TOUT
Figure 18. External Reset during Operation
VCC
RESET
V
RST
pin. Reset pulses longer
16
ATtiny28L/V
TIME-OUT
INTERNAL
RESET
t
TOUT
1062E–10/01
Page 17
ATtiny28L/V
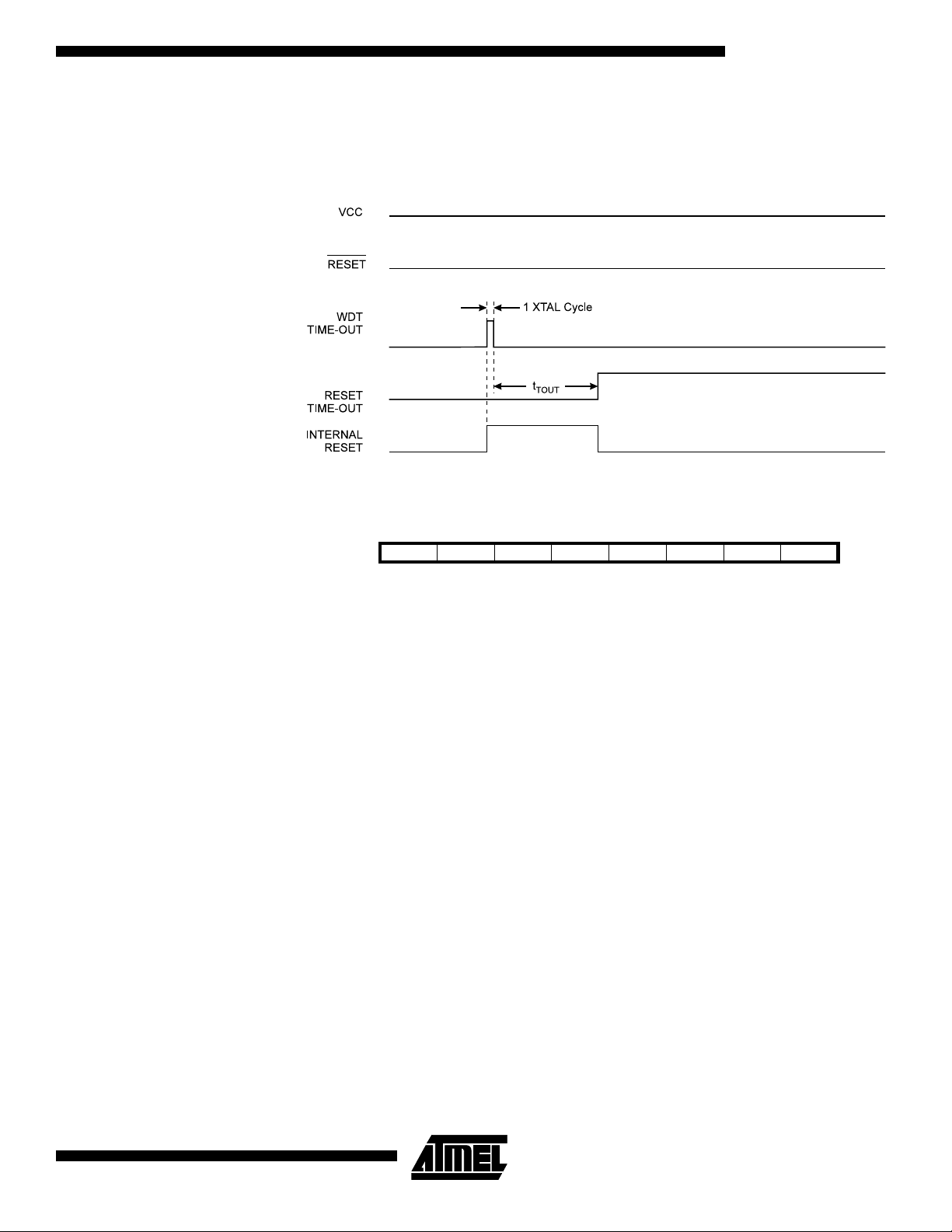
Watchdog Reset When the Watchdog times out, it will generate a short reset pulse of 1 XTAL cycle dura-
tion. On the falling edge of this pulse, the delay timer starts counting the Time-out period
). Refer to page 26 for details on operation of the Watchdog.
(t
TOUT
Figure 19. Watchdog Reset during Operation
MCU Control and Status Register – MCUCS
The MCU Control and Status Register contains control and status bits for general MCU
functions.
Bit 76543210
$07 PLUPB – SE SM WDRF – EXTRF PORF MCUCS
Read/Write R/W R R/W R/W R/W R R/W R/W
Initial Value 0 0 0 0 See Bit
Desc.
0 See Bit Description
• Bit 7 – PLUPB: Pull-up Enable Port B
When the PLUPB bit is set (one), pull-up resistors are enabled on all Port B input pins.
When PLUPB is cleared, the pull-ups are disabled. If any of the special functions of Port
B is enabled, the corresponding pull-up(s) is disabled, independent of the value of
PLUPB.
• Bit 6 – Res: Reserved Bit
This bit is a reserved bit in the ATtiny28 and always reads as zero.
• Bit 5 – SE: Sleep Enable
The SE bit must be set (one) to make the MCU enter the sleep mode when the SLEEP
instruction is executed. To avoid the MCU entering the sleep mode unless it is the programmer’s purpose, it is recommended to set the Sleep Enable SE bit just before the
execution of the SLEEP instruction.
• Bit 4 – SM: Sleep Mode
This bit selects between the two available sleep modes. When SM is cleared (zero), Idle
Mode is selected as sleep mode. When SM is set (one), Power-down mode is selected
as sleep mode. For details, refer to “Sleep Modes” below.
• Bit 3 – WDRF: Watchdog Reset Flag
1062E–10/01
This bit is set if a Watchdog reset occurs. The bit is cleared by a Power-on Reset, or by
writing a logical “0” to the flag.
• Bit 2 – Res: Reserved Bit
This bit is a reserved bit in the ATtiny28 and always reads as zero.
17
Page 18

• Bit 1 – EXTRF: External Reset Flag
This bit is set if an external reset occurs. The bit is cleared by a Power-on Reset, or by
writing a logical “0” to the flag.
• Bit 0 – PORF: Power-on Reset Flag
This bit is set if a Power-on Reset occurs. The bit is cleared by writing a logical “0” to the
flag.
To make use of the reset flags to identify a reset condition, the user should read and
then clear the flag bits in MCUCS as early as possible in the program. If the register is
cleared before another reset occurs, the source of the reset can be found by examining
the reset flags.
Interrupt Handling The ATtiny28 has one 8-bit Interrupt Control Register (ICR).
When an interrupt occurs, the Global Interrupt Enable I-bit is cleared (zero) and all interrupts are disabled. The user software can set (one) the I-bit to enable nested interrupts.
The I-bit is set (one) when a Return from Interrupt instruction (RETI) is executed.
When the program counter is vectored to the actual interrupt vector in order to execute
the interrupt handling routine, hardware clears the corresponding flag that generated the
interrupt. Some of the interrupt flags can also be cleared by writing a logical “1” to the
flag bit position(s) to be cleared.
If an interrupt condition occurs when the corresponding interrupt enable bit is cleared
(zero), the interrupt flag will be set and remembered until the interrupt is enabled or the
flag is cleared by software.
If one or more interrupt conditions occur when the global interrupt enable bit is cleared
(zero), the corresponding interrupt flag(s) will be set and remembered until the global
interrupt enable bit is set (one), and will be executed by order of priority.
Note that external level interrupt does not have a flag and will only be remembered for
as long as the interrupt condition is active.
Note that the status register is not automatically stored when entering an interrupt routine and restored when returning from an interrupt routine. This must be handled by
software.
Interrupt Response Time The interrupt execution response for all the enabled AVR interrupts is four clock cycles
minimum. After four clock cycles the program vector address for the actual interrupt
handling routine is executed. During this 4-clock-cycle period, the program counter (10
bits) is pushed onto the stack. The vector is normally a relative jump to the interrupt routine, and this jump takes two clock cycles. If an interrupt occurs during execution of a
multi-cycle instruction, this instruction is completed before the interrupt is served. If an
interrupt occurs when the MCU is in sleep mode, the interrupt execution response time
is increased by four clock cycles.
A return from an interrupt handling routine takes four clock cycles. During these four
clock cycles, the program counter (10 bits) is popped back from the stack, and the I-flag
in SREG is set. When AVR exits from an interrupt, it will always return to the main program and execute one more instruction before any pending interrupt is served.
18
ATtiny28L/V
1062E–10/01
Page 19
Interrupt Control Register – ICR
ATtiny28L/V
Bit 76543210
$06 INT1 INT0 LLIE TOIE0 ISC11 ISC10 ISC01 ISC00 ICR
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
• Bit 7 – INT1: External Interrupt Request 1 Enable
When the INT1 bit is set (one) and I-bit in the Status Register (SREG) is set (one), the
external pin interrupt 1 is enabled. The interrupt Sense Control1 bits 1/0 (ISC11 and
ISC10) define whether the external interrupt is activated on rising or falling edge, on pin
change or low level of the INT1 pin. The corresponding interrupt of External Interrupt
Request 1 is executed from program memory address $002. See also “External
Interrupt”.
• Bit 6 – INT0: External Interrupt Request 0 Enable
When the INT0 bit is set (one) and the I-bit in the Status Register (SREG) is set (one),
the external pin interrupt 0 is enabled. The interrupt Sense Control0 bits 1/0 (ISC01 and
ISC00) define whether the external interrupt is activated on rising or falling edge, on pin
change or low level of the INT0 pin. The corresponding interrupt of External Interrupt
Request 0 is executed from program memory address $001. See also “External
Interrupt”.
• Bit 5 – LLIE: Low-level Input Interrupt Enable
When the LLIE is set (one) and the I-bit in the status register (SREG) is set (one), the
interrupt on low-level input is activated. Any of the Port B pins pulled low will then cause
an interrupt. However, if any Port B pins are used for other special features, these pins
will not trigger the interrupt. The corresponding interrupt of Low-level Input Interrupt
Request is executed from program memory address $003. See also “Low-level Input
Interrupt”.
• Bit 4 – TOIE0: Timer/Counter0 Overflow Interrupt Enable
When the TOIE0 bit is set (one) and the I-bit in the Status Register is set (one), the
Timer/Counter0 Overflow Interrupt is enabled. The corresponding interrupt (at vector
$004) is executed if an overflow in Timer/Counter0 occurs, i.e., when the TOV0 bit is set
in the Interrupt Flag Register (IFR).
• Bits 3, 2 – ISC11, ISC10: Interrupt Sense Control 1 Bit 1 and Bit 0
The External Interrupt 1 is activated by the external pin INT1 if the SREG I-flag and the
corresponding interrupt enable are set. The level and edges on the external INT1 pin
that activate the interrupt are defined in Table 7.
1062E–10/01
19
Page 20
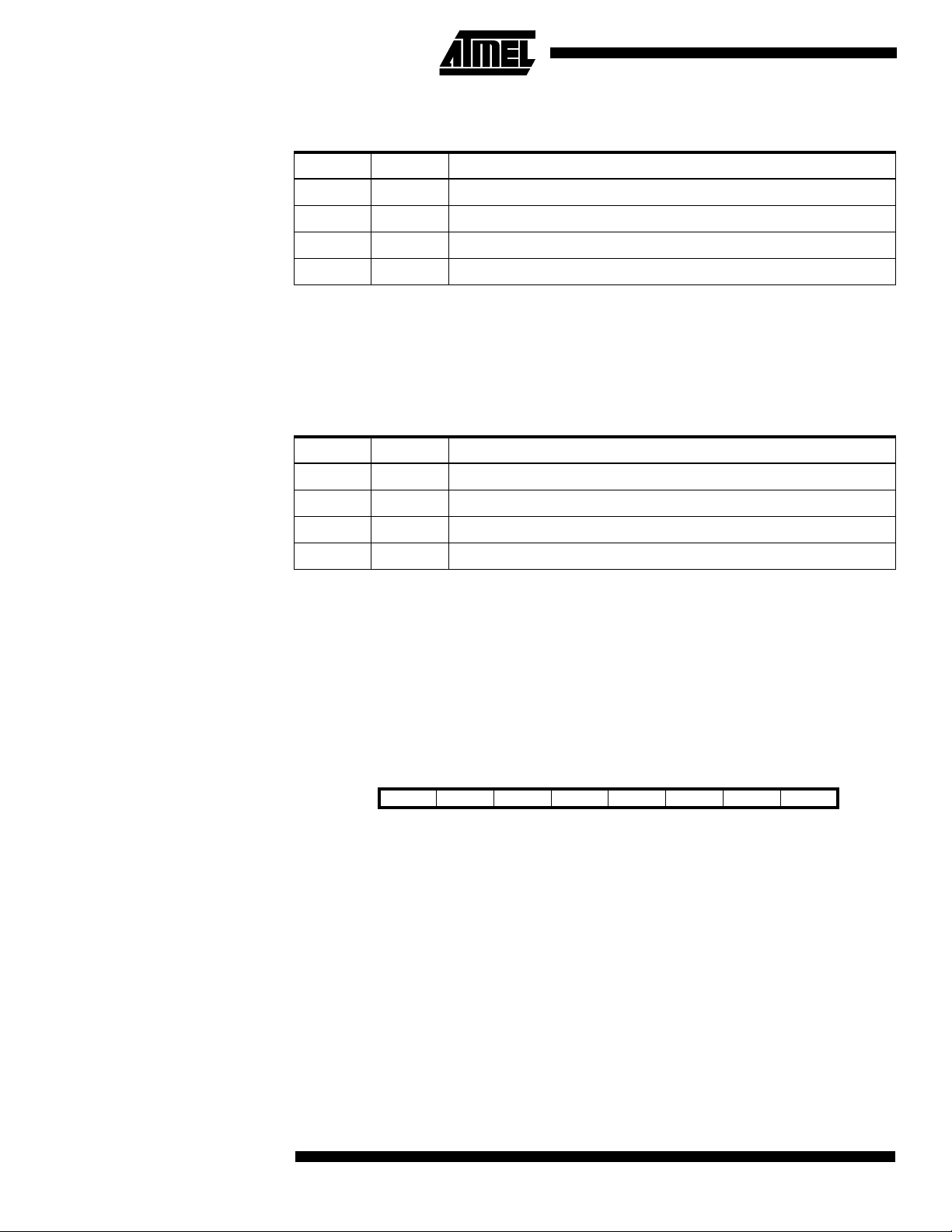
Table 7. Interrupt 1 Sense Control
ISC11 ISC10 Description
0 0 The low level of INT1 generates an interrupt request.
0 1 Any change on INT1 generates an interrupt request.
1 0 The falling edge of INT1 generates an interrupt request.
1 1 The rising edge of INT1 generates an interrupt request.
Note: When changing the ISC11/ISC10 bits, INT1 must be disabled by clearing its Interrupt
Enable bit. Otherwise, an interrupt can occur when the bits are changed.
• Bits 1, 0 – ISC01, ISC00: Interrupt Sense Control 0 Bit 1 and Bit 0
The External Interrupt 0 is activated by the external pin INT0 if the SREG I-flag and the
corresponding interrupt enable are set. The level and edges on the external INT0 pin
that activate the interrupt are defined in Table 8.
Table 8. Interrupt 0 Sense Control
ISC01 ISC00 Description
0 0 The low level of INT0 generates an interrupt request.
0 1 Any change on INT0 generates an interrupt request.
1 0 The falling edge of INT0 generates an interrupt request.
1 1 The rising edge of INT0 generates an interrupt request.
Note: When changing the ISC01/ISC00 bits, INT0 must be disabled by clearing its Interrupt
Enable bit. Otherwise, an interrupt can occur when the bits are changed.
Interrupt Flag Register – IFR
The value on the INT pins are sampled before detecting edges. If edge interrupt is
selected, pulses that last longer than one CPU clock period will generate an interrupt.
Shorter pulses are not guaranteed to generate an interrupt. If low-level interrupt is
selected, the low level must be held until the completion of the currently executing
instruction to generate an interrupt. If enabled, a level-triggered interrupt will generate
an interrupt request as long as the pin is held low.
Bit 76543210
$05 INTF1 INTF0 – TOV0 ––––IFR
Read/Write R/W R/W R R/W R R R R
Initial Value 0 0 0 0 0 0 0 0
• Bit 7 – INTF1: External Interrupt Flag1
When an edge on the INT1 pin triggers an interrupt request, the corresponding interrupt
flag, INTF1 becomes set (one). If the I-bit in SREG and the corresponding interrupt
enable bit, INT1 in GIMSK is set (one), the MCU will jump to the interrupt vector. The
flag is cleared when the interrupt routine is executed. Alternatively, the flag can be
cleared by writing a logical “1” to it. This flag is always cleared when INT1 is configured
as level interrupt.
• Bit 6 – INTF0: External Interrupt Flag0
When an edge on the INT0 pin triggers an interrupt request, the corresponding interrupt
flag, INTF0 becomes set (one). If the I-bit in SREG and the corresponding interrupt
enable bit, INT0 in GIMSK is set (one), the MCU will jump to the interrupt vector. The
flag is cleared when the interrupt routine is executed. Alternatively, the flag can be
20
ATtiny28L/V
1062E–10/01
Page 21

ATtiny28L/V
cleared by writing a logical “1” to it. This flag is always cleared when INT0 is configured
as level interrupt.
• Bit 5 – Res: Reserved Bit
This bit is a reserved bit in the ATtiny28 and always reads as zero.
• Bit 4 – TOV0: Timer/Counter0 Overflow Flag
The bit TOV0 is set (one) when an overflow occurs in Timer/Counter0. TOV0 is cleared
by hardware when executing the corresponding interrupt handling vector. TOV0 is
cleared by writing a logical “1” to the flag. When the SREG I-bit, TOIE0 in ICR and TOV0
are set (one), the Timer/Counter0 Overflow interrupt is executed.
• Bit 3..0 - Res: Reserved Bits
These bits are reserved bits in the ATtiny28 and always read as zero.
Note: 1. One should not try to use the SBI (Set Bit in I/O Register) instruction to clear individ-
ual flags in the Register. This will result in clearing all the flags in the register,
because the register is first read, then modified and finally written, thus writing ones
to all set flags. Using the CBI (Clear Bit in I/O Register) instruction on IFR will result in
clearing all bits apart from the specified bit.
External Interrupt The external interrupt is triggered by the INT pins. Observe that, if enabled, the interrupt
will trigger even if the INT pin is configured as an output. This feature provides a way of
generating a software interrupt. The external interrupt can be triggered by a falling or rising edge, a pin change or a low level. This is set up as indicated in the specification for
the Interrupt Control Register (ICR). When the external interrupt is enabled and is configured as level-triggered, the interrupt will trigger as long as the pin is held low.
The external interrupt is set up as described in the specification for the Interrupt Control
Register (ICR).
Low-level Input Interrupt The low-level interrupt is triggered by setting any of the Port B pins low. However, if any
Port B pins are used for other special features, these pins will not trigger the interrupt.
For example, if the analog comparator is enabled, a low level on PB0 or PB1 will not
cause an interrupt. This is also the case for the special functions T0, INT0 and INT1. If
low-level interrupt is selected, the low level must be held until the completion of the currently executing instruction to generate an interrupt. When this interrupt is enabled, the
interrupt will trigger as long as any of the Port B pins are held low.
Sleep Modes To enter the sleep modes, the SE bit in MCUCS must be set (one) and a SLEEP instruc-
tion must be executed. The SM bit in the MCUCS register selects which sleep mode
(Idle or Power-down) will be activated by the SLEEP instruction. If an enabled interrupt
occurs while the MCU is in a sleep mode, the MCU awakes. The CPU is then halted for
four cycles. It executes the interrupt routine and resumes execution from the instruction
following SLEEP. The contents of the register file and I/O memory are unaltered. If a
reset occurs during sleep mode, the MCU wakes up and executes from the Reset
vector.
Idle Mode When the SM bit is cleared (zero), the SLEEP instruction forces the MCU into the Idle
Mode, stopping the CPU but allowing Timer/Counters, Watchdog and the interrupt system to continue operating. This enables the MCU to wake up from external triggered
interrupts as well as internal ones like Timer Overflow interrupt and Watchdog reset. If
wake-up from the Analog Comparator Interrupt is not required, the analog comparator
can be powered down by setting the ACD bit in the Analog Comparator Control and Status register (ACSR). This will reduce power consumption in Idle Mode. Note that the
ACD bit is set by default.
1062E–10/01
21
Page 22
Power-down Mode When the SM bit is set (one), the SLEEP instruction forces the MCU into the Power-
down mode. In this mode, the external oscillator is stopped, while the external interrupts
and the Watchdog (if enabled) continue operating. Only an external reset, a Watchdog
reset (if enabled), or an external level interrupt can wake up the MCU.
Note that if a level-triggered interrupt is used for wake-up from Power-down mode, the
changed level must be held for some time to wake up the MCU. This makes the MCU
less sensitive to noise. The wake-up period is equal to the clock-counting part of the
reset period (see Table 5). The MCU will wake up from power-down if the input has the
required level for two Watchdog oscillator cycles. If the wake-up period is shorter than
two Watchdog oscillator cycles, the MCU will wake up if the input has the required level
for the duration of the wake-up period. If the wake-up condition disappears before the
wake-up period has expired, the MCU will wake up from power-down without executing
the corresponding interrupt. The period of the Watchdog oscillator is 2.7 µs (nominal) at
3.0V and 25
shown in the section “Typical Characteristics” on page 55.
When waking up from the Power-down mode, there is a delay from the wake-up condition until the wake-up becomes effective. This allows the clock to restart and become
stable after having been stopped.
°C. The frequency of the watchdog oscillator is voltage-dependent as
22
ATtiny28L/V
1062E–10/01
Page 23
ATtiny28L/V
Timer/Counter0 The ATtiny28 provides one general-purpose 8-bit Timer/Counter – Timer/Counter0.
Timer/Counter0 has prescaling selection from the 10-bit prescaling timer. The
Timer/Counter0 can either be used as a timer with an internal clock time base or as a
counter with an external pin connection that triggers the counting.
Timer/Counter Prescaler Figure 20 shows the Timer/Counter prescaler.
Figure 20. Timer/Counter0 Prescaler
CK
COUNT ENABLE
FROM MODULATOR
T0
CS00
CS01
CS02
10-BIT T/C PRESCALER
CK/64
0
TIMER/COUNTER0 CLOCK SOURCE
TCK0
CK/256
CK/1024
The four different prescaled selections are: the hardware modulator period, CK/64,
CK/256 and CK/1028, where CK is the oscillator clock. CK, external source and stop
can also be selected as clock sources.
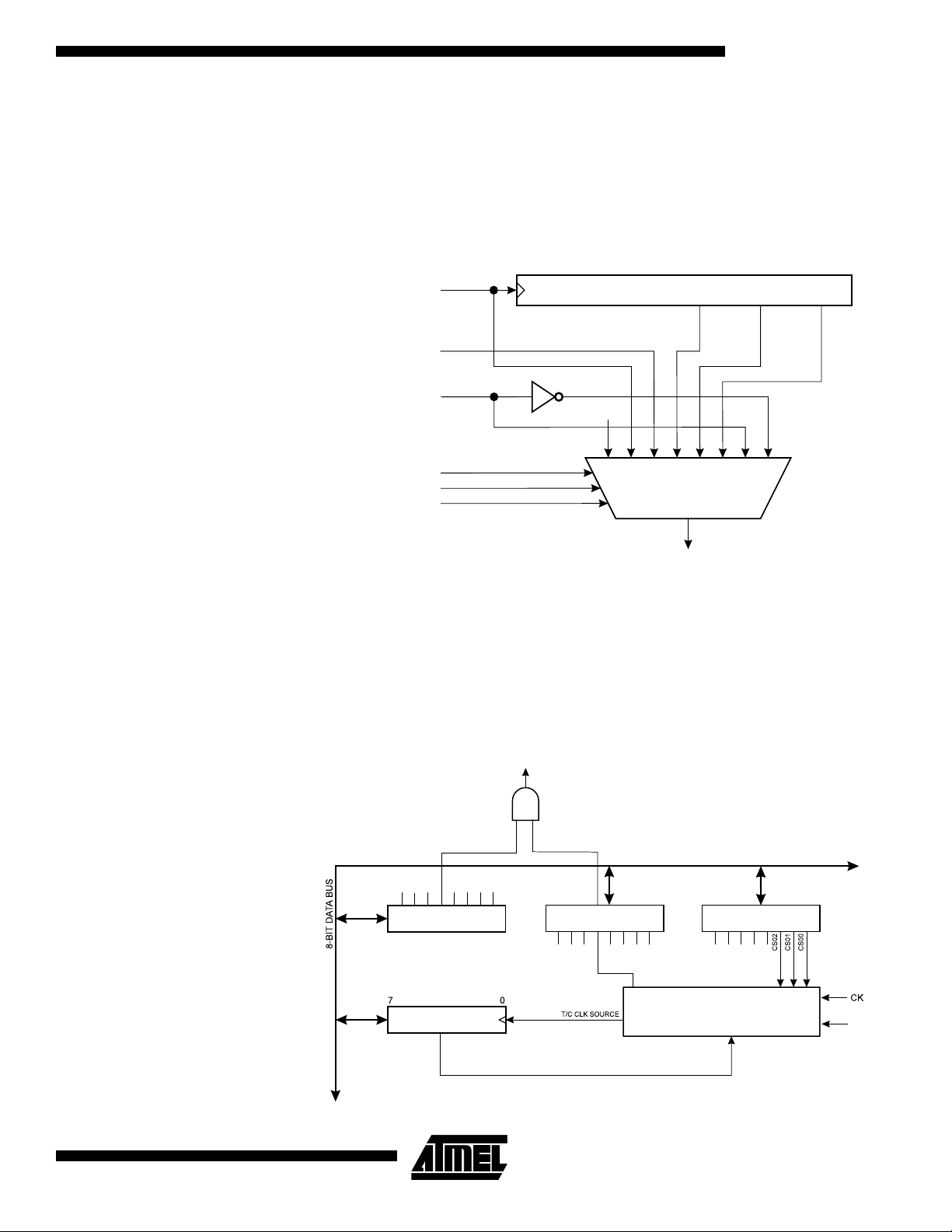
Figure 21 shows the block diagram for Timer/Counter0.
Figure 21. Timer/Counter0 Block Diagram
T/C0 OVER-
FLOW IRQ
1062E–10/01
INTERRUPT CONTROL
TOIE0
REGISTER (ICR)
TIMER/COUNTER0
(TCNT0)
TOV0
INTERRUPT FLAG
REGISTER (IFR)
TOV0
T/C0 CONTROL
REGISTER (TCCR0)
CONTROL
LOGIC
T0
23
Page 24

Timer/Counter0 Control Register – TCCR0
The 8-bit Timer/Counter0 can select clock source from CK, prescaled CK or an external
pin. In addition, it can be stopped as described in the specification for the
Timer/Counter0 Control Register (TCCR0). The overflow status flag is found in the Interrupt Flag Register (IFR). Control signals are found in the Timer/Counter0 Control
Register (TCCR0). The interrupt enable/disable setting for Timer/Counter0 is found in
the Interrupt Control Register (ICR).
When Timer/Counter0 is externally clocked, the external signal is synchronized with the
oscillator frequency of the CPU. To ensure proper sampling of the external clock, the
minimum time between two external clock transitions must be at least one internal CPU
clock period. The external clock signal is sampled on the rising edge of the internal CPU
clock.
The 8-bit Timer/Counter0 features both a high-resolution and a high-accuracy usage
with the lower prescaling opportunities. Similarly, the high prescaling opportunities make
the Timer/Counter0 useful for lower speed functions or exact timing functions with infrequent actions.
Bit 7 6 5 4 3 210
$04 FOV0 ––OOM01 OOM00 CS02 CS01 CS00 TCCR0
Read/Write R/W R R R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
• Bit 7 – FOV0: Force Overflow
Writing a logical “1” to this bit forces a change on the overflow output pin PA2 according
to the values already set in OOM01 and OOM00. If the OOM01 and OOM00 bits are
written in the same cycle as FOV0, the new settings will not take effect until the next
overflow or forced overflow occurs. The Force Overflow bit can be used to change the
output pin without waiting for an overflow in the timer. The automatic action programmed
in OOM01 and OOM00 happens as if an overflow had occurred, but no interrupt is generated. The FOV0 bit will always read as zero, and writing a zero to this bit has no effect.
• Bits 6, 5 – Res: Reserved Bits
These bits are reserved bits in the ATtiny28 and always read as zero.
• Bits 4, 3 – OOM01, OOM00: Overflow Output Mode, Bits 1 and 0
The OOM01 and OOM00 control bits determine any output pin action following an overflow or a forced overflow in Timer/Counter0. Any output pin actions affect pin PA2. The
control configuration is shown in Table 9.
Table 9. Overflow Output Mode Select
OOM01 OOM00 Description
0 0 Timer/Counter0 disconnected from output pin PA2
0 1 Toggle the PA2 output line.
1 0 Clear the PA2 output line to zero.
1 1 Set the PA2 output line to one.
24
• Bits 2, 1, 0 – CS02, CS01, CS00: Clock Select0, Bits 2, 1 and 0
The Clock Select0 bits 2, 1 and 0 define the prescaling source of Timer/Counter0.
ATtiny28L/V
1062E–10/01
Page 25

Timer Counter 0 – TCNT0
ATtiny28L/V
Table 10. Clock 0 Prescale Select
CS02 CS01 CS00 Description
0 0 0 Stop, the Timer/Counter0 is stopped.
001CK
0 1 0 Modulator Period
011CK/64
100CK/256
1 0 1 CK/1024
1 1 0 External Pin T0, falling edge
1 1 1 External Pin T0, rising edge
The Stop condition provides a Timer Enable/Disable function. The CK down divided
modes are scaled directly from the CK oscillator clock. If the external pin modes are
used for Timer/Counter0, transitions on PB2/(T0) will clock the counter even if the pin is
configured as an output. This feature can give the user software control of the counting.
Bit 76543210
$03 MSB LSB TCNT0
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
The Timer/Counter0 is realized as an up-counter with read and write access. If the
Timer/Counter0 is written and a clock source is present, the Timer/Counter0 continues
counting in the timer clock cycle following the write operation.
1062E–10/01
25
Page 26

Watchdog Timer The Watchdog Timer is clocked from a separate on-chip oscillator. By controlling the
Watchdog Timer prescaler, the Watchdog reset interval can be adjusted as shown in
Table 11. See characterization data for typical values at other V
(Watchdog Reset) instruction resets the Watchdog Timer. Eight different clock cycle
periods can be selected to determine the reset period. If the reset period expires without
another Watchdog reset, the ATtiny28 resets and executes from the reset vector. For
timing details on the Watchdog reset, refer to page 17.
To prevent unintentional disabling of the Watchdog, a special turn-off sequence must be
followed when the Watchdog is disabled. Refer to the description of the Watchdog Timer
Control Register for details.
Figure 22. Watchdog Timer
Oscillator
1 MHz at V
350 kHz at V
110 kHz at V
CC
CC
CC
= 5V
= 3V
= 2V
levels. The WDR
CC
Watchdog Timer Control Register – WDTCR
Bit 765 4 3210
$01 –––WDTOE WDE WDP2 WDP1 WDP0 WDTCR
Read/Write R R R R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
• Bits 7..5 - Res: Reserved Bits
These bits are reserved bits in the ATtiny28 and will always read as zero.
• Bit 4 – WDTOE: Watchdog Turn-off Enable
This bit must be set (one) when the WDE bit is cleared. Otherwise, the Watchdog will
not be disabled. Once set, hardware will clear this bit to zero after four clock cycles.
Refer to the description of the WDE bit for a Watchdog disable procedure.
• Bit 3 – WDE: Watchdog Enable
When the WDE is set (one), the Watchdog Timer is enabled and if the WDE is cleared
(zero), the Watchdog Timer function is disabled. WDE can only be cleared if the
WDTOE bit is set (one). To disable an enabled Watchdog Timer, the following procedure must be followed:
1. In the same operation, write a logical “1” to WDTOE and WDE. A logical “1” must
be written to WDE even though it is set to one before the disable operation starts.
2. Within the next four clock cycles, write a logical “0” to WDE. This disables the
Watchdog.
26
ATtiny28L/V
1062E–10/01
Page 27

ATtiny28L/V
• Bits 2..0 – WDP2, WDP1, WDP0: Watchdog Timer Prescaler 2, 1 and 0
The WDP2, WDP1 and WDP0 bits determine the Watchdog Timer prescaling when the
Watchdog Timer is enabled. The different prescaling values and their corresponding
time-out periods are shown in Table 11.
Table 11. Watchdog Timer Prescale Select
Number of WDT
Oscillator
WDP2 WDP1 WDP0
0 0 0 16K cycles 0.15 s 47 ms 15 ms
0 0 1 32K cycles 0.30 s 94 ms 30 ms
0 1 0 64K cycles 0.60 s 0.19 s 60 ms
0 1 1 128K cycles 1.2 s 0.38 s 0.12 s
1 0 0 256K cycles 2.4 s 0.75 s 0.24 s
1 0 1 512K cycles 4.8 s 1.5 s 0.49 s
1 1 0 1,024K cycles 9.6 s 3.0 s 0.97 s
1 1 1 2,048K cycles 19 s 6.0 s 1.9 s
Note: The frequency of the Watchdog oscillator is voltage-dependent, as shown in the section
“Typical Characteristics” on page 55.
The WDR (Watchdog Reset) instruction should always be executed before the Watchdog
Timer is enabled. This ensures that the reset period will be in accordance with the
Watchdog Timer prescale settings. If the Watchdog Timer is enabled without reset, the
Watchdog Timer may not start counting from zero.
Cycles
Typical
Time-out at
V
= 2.0V
CC
Typ i cal
Time-out at
V
= 3.0V
CC
Typ i cal
Time-out at
V
= 5.0V
CC
1062E–10/01
27
Page 28

Calibrated Internal RC Oscillator
Oscillator Calibration Register – OSCCAL
The calibrated internal oscillator provides a fixed 1.2 MHz (nominal) clock at 3V and
°C. This clock may be used as the system clock. See the section “Clock Options” on
25
page 4 for information on how to select this clock as the system clock. This oscillator
can be calibrated by writing the calibration byte to the OSCCAL register. When this
oscillator is used as the chip clock, the Watchdog oscillator will still be used for the
Watchdog Timer and for the reset time-out. For details on how to use the pre-programmed calibration value, see the section “Calibration Byte” on page 44.
Bit 76543210
$00 CAL7 CAL6 CAL5 CAL4 CAL3 CAL2 CAL1 CAL0 OSCCAL
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
• Bits 7..0 – CAL7..CAL0: Oscillator Calibration Value
Writing the calibration byte to this address will trim the internal oscillator to remove process variation from the oscillator frequency. When OSCCAL is zero, the lowest available
frequency is chosen. Writing non-zero values to the register will increase the frequency
to the internal oscillator. Writing $FF to the register gives the highest available frequency. Table 12 shows the range for OSCCAL. Note that the oscillator is intended for
calibration to 1.2 MHz, thus tuning to other values is not guaranteed. At 3V and 25
o
C,
the pre-programmed calibration byte gives a frequency within ± 1% of the nominal
frequency.
Table 12. Internal RC Oscillator Range
OSCCAL Value Min Frequency Max Frequency
0x00 0.6 MHz 1.2 MHz
0x7F 0.8 MHz 1.7 MHz
0xFF 1.2 MHz 2.5 MHz
28
ATtiny28L/V
1062E–10/01
Page 29

ATtiny28L/V
Hardware Modulator ATtiny28 features a built-in hardware modulator connected to a high-current output pad,
PA2. The hardware modulator generates a configurable pulse train. The on-time of a
pulse can be set to a number of chip clock cycles. This is done by configuring the Modulation Control Register (MODCR).
Modulation Control Register – MODCR
Bit 76543 2 1 0
$02
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
ONTIM4 ONTIM3 ONTIM2 ONTIM1 ONTIM0 MCONF2 MCONF1 MCONF0 MODCR
• Bits 7..3 – ONTIM4..0: Modulation On-time
This 5-bit value +1 determines the number of clock cycles the output pin PA2 is active
(low).
• Bits 2..0 – MCONF2..0: Modulation Configuration Bits 2, 1 and 0
These three bits determine the relationship between the on- and off-times of the modulator, and thereby the duty-cycle. The various settings are shown in Table 13. The
minimum and maximum modulation period is also shown in the table. The minimum
modulation period is obtained by setting ONTIM to zero, while the maximum period is
obtained by setting ONTIM to 31. The configuration values for some common oscillator
and carrier frequencies are listed in Table 15. The relationship between oscillator frequency and carrier frequency is:
fcarrier
-----------------------------------------------------=
()
On-time Off-time+
fosc
If the MCONF register is set to 111, the carrier frequency will be equal to the oscillator
frequency.
Table 13. MCONF2..0 Effect on Duty-cycle and Modulation Period
MCONF2..0 On-time Off-time Duty-cycle Min Period Max Period Comment
000 X X 100% X X Unmodulated output
001 ONTIM+1 ONTIM+1 50% 2 CK 64 CK
010 ONTIM+1 2 x (ONTIM+1) 33% 3 CK 96 CK
011 ONTIM+1 3 x (ONTIM+1) 25% 4 CK 128 CK
100 2 x (ONTIM+1) ONTIM+1 67% 3 CK 96 CK
101 3 x (ONTIM+1) ONTIM+1 75% 4 CK 128 CK
110 Reserved
111 X X Note 1 1 CK 1 CK High-frequency output
Note: In the high-frequency mode, the output is gated with the clock signal. Thus, the on- and off-times will be dependent on the clock
input to the MCU. Also note that when changing from this mode directly to another modulation mode, the output will have a
small glitch. Thus, PA2 should be set to stop the modulated output before changing from this mode.
1062E–10/01
29
Page 30

PA2 is the built-in, high-current LED driver and it is always an output pin. The output
buffer can sink 25 mA at V
= 2.0V. When MCONF is zero, modulation is switched off
CC
and the pin acts as a normal high-current output pin. The following truth table shows the
effect of various PORTA2 and MCONF settings.
Table 14. PA2 Output
PORTA2 MCONF PA2 Output
000
0 1 - 7 Modulated
1X1
The modulation period is available as a prescale to Timer/Counter0 and thus, this timer
should be used to time the length of each burst. If the number of pulses to be sent is N,
the number 255 - N should be loaded to the timer. When an overflow occurs, the transmission is complete.The OOM01 and OOM00 bits in TCCR0 can be configured to
automatically change the value on PA2 when a Timer/Counter0 overflow occurs. See
“Timer/Counter0” on page 23 for details on how to configure the OOM01 and OOM00
bits.
The modulation period is available as a prescale even when PORTA2 is high and modulation is stopped. Thus, this prescale can also be used to time the intervals between
bursts.
To get a glitch-free output, the user should first configure the MODCR register to enable
modulation. There are two ways to start the modulation:
1. Clear the PORTA2 bit in Port A Data Register (PORTA).
2. Configure OOM00 and OOM01 bits in the Timer/Counter0 Control Register
(TCCR0) to clear PA2 on the next overflow. Either an overflow or a forced overflow can then be used to start modulation.
The PA2 output will then be set low at the start of the next cycle. To stop the modulated
output, the user should set the PORTA2 bit or configure OOM00 and OOM01 to set PA2
on the next overflow. If the MODCR register is changed during modulation, the changed
value will take effect at the start of the next cycle, producing a glitch-free output. See
Figure 23 below and Figure 30 on page 38.
30
ATtiny28L/V
1062E–10/01
Page 31

Figure 23. The Hardware Modulator
RM
8
/
5
/
5
3
/
/
WM
ONTIM
MCONF
FROM
PORTA2
3
/
IONTIM
IMCONF
IPORTA2
ATtiny28L/V
5
/
MODULATOR
STATE
3
/
MACHINE
DISABLE
MODUALTOR
ENABLE SETTING
COUNT ENABLE
TO TIMER/COUNTER0
WM: WRITE MODCR
RM: READ MODCR
DQ
PA2
0
1
Figure 24 to Figure 27 show examples on output from the Modulator. Figure 24 also
shows the timing for the enable setting signal and for the count enable signal to
Timer/Counter0.
Figure 24. Modulation with ONTIM = 3, MCONF = 010.
CLK
PA 2
ENABLE
SETTING
COUNT
ENABLE
Note: 1. Clock frequency: 455 kHz; modulation frequency: 38 kHz; duty-cycle: 33%
1062E–10/01
Figure 25. Modulation with ONTIM = 5, MCONF = 001
CLK
PA 2
Note: Clock frequency: 455 kHz; modulation frequency: 38 kHz; duty-cycle: 50%
31
Page 32

Figure 26. Modulation with ONTIM = 1, MCONF = 011
CLK
PA 2
Note: Clock frequency: 3.64 MHz; modulation frequency: 455 kHz; duty-cycle: 25%
Figure 27. Modulation with ONTIM = 3, MCONF = 001
CLK
PA 2
Note: Clock frequency: 3.64 MHz; modulation frequency: 455 kHz; duty-cycle: 50%
Table 15. Some Common Modulator Configurations
Crystal/Resonator
Frequency
455 kHz 38 kHz 0.2 25% 2 011
455 kHz 38 kHz 0.2 33% 3 010
455 kHz 38 kHz 0.2 50% 5 001
455 kHz 38 kHz 0.2 67% 3 100
455 kHz 38 kHz 0.2 75% 2 101
1 MHz 38 kHz 1.2 50% 12 001
1.8432 MHz 38 kHz 1.1 25% 11 011
1.8432 MHz 38 kHz 1.1 33% 15 010
1.8432 MHz 38 kHz 1.1 50% 23 001
2 MHz 38 kHz 1.2 25% 12 011
2 MHz 38 kHz 1.2 50% 25 001
2.4576 MHz 38 kHz 1.1 50% 31 001
3.2768 MHz 38 kHz 2.0 25% 21 011
4 MHz 38 kHz 1.2 25% 25 011
455 kHz 455 kHz 0.0 approx. 50% X 111
1 MHz 455 kHz 9.9 50% 0 001
Carrier
Frequency
% Error in
Frequency Duty-cycle
ONTIM
Value
MCONF
Value
32
1.82 MHz 455 kHz 0.0 25% 0 011
1.82 MHz 455 kHz 0.0 50% 1 001
1.8432 MHz 455 kHz 1.3 25% 0 011
1.8432 MHz 455 kHz 1.3 50% 1 001
2 MHz 455 kHz 9.9 25% 0 011
2 MHz 455 kHz 9.9 50% 1 001
ATtiny28L/V
1062E–10/01
Page 33

Table 15. Some Common Modulator Configurations (Continued)
ATtiny28L/V
Crystal/Resonator
Frequency
2.4576 MHz 455 kHz 10.0 33% 1 010
2.4576 MHz 455 kHz 10.0 50% 2 001
3.2768 MHz 455 kHz 10.0 25% 1 011
3.2768 MHz 455 kHz 10.0 50% 3 001
3.64 MHz 455 kHz 0.0 25% 1 011
3.64 MHz 455 kHz 0.0 50% 3 001
4 MHz 455 kHz 9.9 25% 1 011
4 MHz 455 kHz 9.9 50% 3 001
Carrier
Frequency
% Error in
Frequency Duty-cycle
ONTIM
Value
MCONF
Value
1062E–10/01
33
Page 34

Analog Comparator The analog comparator compares the input values on the positive input PB0 (AIN0) and
negative input PB1 (AIN1). When the voltage on the positive input PB0 (AIN0) is higher
than the voltage on the negative input PB1 (AIN1), the Analog Comparator Output
(ACO) is set (one). The comparator can trigger a separate interrupt exclusive to the analog comparator. The user can select interrupt triggering on comparator output rise, fall or
toggle. A block diagram of the comparator and its surrounding logic is shown in Figure
.
28
Figure 28. Analog Comparator Block Diagram
PB0
PB1
Analog Comparator Control and Status Register – ACSR
Bit 76543210
$08 ACD – ACO ACI AC IE – ACIS1 ACIS0 ACSR
Read/Write R/W R R R/W R/W R R/W R/W
Initial Value 1 0 X 0 0 0 0 0
• Bit 7 – ACD: Analog Comparator Disable
When this bit is set (one), the power to the analog comparator is switched off. This bit
can be set at any time to turn off the analog comparator. When changing the ACD bit,
the Analog Comparator Interrupt must be disabled by clearing the ACIE bit in ACSR.
Otherwise, an interrupt can occur when the bit is changed. To use the analog comparator, the user must clear this bit.
• Bit 6 – Res: Reserved Bit
This bit is a reserved bit in the ATtiny28 and will always read as zero.
• Bit 5 – ACO: Analog Comparator Output
ACO is directly connected to the comparator output.
• Bit 4 – ACI: Analog Comparator Interrupt Flag
This bit is set (one) when a comparator output event triggers the interrupt mode defined
by ACI1 and ACI0. The Analog Comparator Interrupt routine is executed if the ACIE bit
is set (one) and the I-bit in SREG is set (one). ACI is cleared by hardware when executing the corresponding interrupt handling vector. Alternatively, ACI is cleared by writing a
logical “1” to the flag.
• Bit 3 – ACIE: Analog Comparator Interrupt Enable
34
When the ACIE bit is set (one) and the I-bit in the Status Register is set (one), the analog comparator interrupt is activated. When cleared (zero), the interrupt is disabled.
ATtiny28L/V
1062E–10/01
Page 35

ATtiny28L/V
• Bit 2 – RES: Reserved Bit
This bit is a reserved bit in the ATtiny28 and will always read as zero.
• Bits 1, 0 - ACIS1, ACIS0: Analog Comparator Interrupt Mode Select
These bits determine which comparator events trigger the Analog Comparator Interrupt.
The different settings are shown in Table 16.
Table 16. ACIS1/ACIS0 Settings
ACIS1 ACIS0 Interrupt Mode
0 0 Comparator Interrupt on Output Toggle
01Reserved
1 0 Comparator Interrupt on Falling Output Edge
1 1 Comparator Interrupt on Rising Output Edge
Note: When changing the ACIS1/ACIS0 bits, the Analog Comparator Interrupt must be dis-
abled by clearing its Interrupt Enable bit in the ACSR register. Otherwise, an interrupt can
occur when the bits are changed.
Caution: Using the SBI or CBI instruction on bits other than ACI in this register will write
a one back into ACI if it is read as set, thus clearing the flag.
1062E–10/01
35
Page 36

I/O Ports All AVR ports have true read-modify-write functionality when used as general digital I/O
ports. This means that the direction of one port pin can be changed without unintentionally changing the direction of any other pin with the SBI and CBI instructions. The same
applies for changing drive value (if configured as output) or enabling/disabling of pull-up
resistors (if configured as input).
Port A Port A is a 4-bit I/O port. PA2 is output-only, while PA3, PA1 and PA0 are bi-directional.
Three I/O memory address locations are allocated for Port A, one each for the Data
Register – PORTA, $1B, Port A Control Register – PACR, $1A and the Port A Input Pins
– PINA, $19. The Port A Input Pins address is read-only, while the Data Register and
the Control Register are read/write. Compared to other output ports, the Port A output is
delayed one extra clock cycle.
Port pins PA0, PA1 and PA3 have individually selectable pull-up resistors. When pins
PA0, PA1 or PA3 are used as inputs and are externally pulled low, they will source current if the internal pull-up resistors are activated. PA2 is output-only. The PA2 output
buffer can sink 25 mA and thus drive a high-current LED directly. This output can also
be modulated (see “Hardware Modulator” on page 29 for details).
Port A Data Register – PORTA
Bit 76543210
$1B
Read/Write R R R R R/W R/W R/W R/W
Initial Value 0 0 0 0 0 1 0 0
––––PORTA3 PORTA2 PORTA1 PORTA0 PORTA
Port A Control Register – PAC R
Bit 76543210
$1A ––––DDA3 PA2HC DDA1 DDA0 PACR
Read/Write R R R R R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
• Bits 7..4 – Res: Reserved Bits
These bits are reserved bits in the ATtiny28 and always read as zero.
• Bit 3 – DDA3: Data Direction PA3
When DDA3 is set (one), the corresponding pin is an output pin. Otherwise, it is an input
pin.
• Bit 2 – PA2HC: PORTA2 High Current Enable
When the PA2HC bit is set (one), an additional driver at the output pin PA2 is enabled.
This makes it possible to sink 25 mA at V
cleared (zero), PA2 can sink 15 mA at V
= 1.8V (VOL = 0.8V). When the PA2HC bit is
CC
= 1.8V (VOL = 0.8V).
CC
• Bits 1, 0 – DDA1, DDA0: Data Direction PA1 and PA0
When DDAn is set (one), the corresponding pin is an output pin. Otherwise, it is an input
pin.
36
ATtiny28L/V
1062E–10/01
Page 37

ATtiny28L/V
Port A as General Digital I/O PA3, PA1 and PA0 are general I/O pins. The DDAn (n: 3,1,0) bits in PACR select the
direction of these pins. If DDAn is set (one), PAn is configured as an output pin. If DDAn
is cleared (zero), PAn is configured as an input pin. If PORTAn is set (one) when the pin
is configured as an input pin, the MOS pull-up resistor is activated. To switch the pull-up
resistor off, the PORTAn bit has to be cleared (zero) or the pin has to be configured as
an output pin. The effects of the DDAn and PORTAn bits on PA3, PA1 and PA0 are
shown in Table 17. The port pins are tri-stated when a reset condition becomes active,
even if the clock is not running.
Table 17. DDAn Effects on Port A Pins
DDAn PORTAn I/O Pull-up Comment
0 0 Input No Tri-state (high-Z)
0 1 Input Yes PAn will source current if ext. pulled low.
1 0 Output No Push-pull Zero Output
1 1 Output No Push-pull One Output
Note: n: 3,1,0, pin number
Port A Input Pins Address – PINA
Bit 76543210
$19 ––––PINA3 – PINA1 PINA0 PINA
Read/WriteRRRRRRRR
Initial Value 0 0 0 0 N/A 0 N/A N/A
The Port A Input Pins address (PINA) is not a register; this address enables access to
the physical value on each Port A pin. When reading PORTA, the Port A Data Latch is
read and when reading PINA, the logical values present on the pins are read.
Alternate Function of PA2 PA2 is the built-in, high-current LED driver and it is always an output pin. The output sig-
nal can be modulated with a software programmable frequency. See “Hardware
Modulator” on page 29 for further details.
1062E–10/01
37
Page 38

Port A Schematics Note that all port pins are synchronized. The synchronization latches are, however, not
shown in the figures.
Figure 29. Port A Schematic Diagram (Pins PA0, PA1 and PA3)
RD
MOS
PULL-
UP
RESET
R
D
Q
DDAn
C
WD
RESET
Q
PORTAn
WP
R
D
C
DATA BUS
PAn
RESET
R
C
DQ
RL
RP
WRITE PORTA
WP:
WRITE DDRA
WD:
READ PORTA LATCH
RL:
READ PORTA PIN
RP:
READ DDRA
RD:
0,1,3
n:
Figure 30. Port A Schematic Diagram (Pin PA2)
PA2
WP:
WRITE PORTA
RL:
READ PORTA LATCH
Note: Both the flip-flops shown
have reset value one (set).
HARDWARE
MODULATOR
1
0
RESET
R
C
RESET
OOM01
0
0
1
1
DATA BUS
OOM00
0
1
0
1
R
DQ
PORTA2
C
WP
RL
DISABLE
TOGGLE
CLEAR
SET
DQ
38
ATtiny28L/V
TOV0
FOV0
1062E–10/01
Page 39

Port B Port B is an 8-bit input port.
One I/O address location is allocated for the Port B Input Pins – PINB, $16. The Port B
Input Pins address is read-only.
All port pins have pull-ups that can be switched on for all Port B pins simultaneously. If
any of the Port B special functions is enabled, the corresponding pull-up(s) is disabled.
When pins PB0 to PB7 are externally pulled low, they will source current (I
nal pull-up resistors are activated.
The Port B pins with alternate functions are shown in Table 18.
Table 18. Port B Pin Alternate Functions
Port Pin Alternate Functions
PB0 AIN0 (Analog Comparator Positive Input)
PB1 AIN1 (Analog Comparator Negative Input)
PB2 T0 (Timer/Counter 0 External Counter Input)
PB3 INT0 (External Interrupt 0 Input)
PB4 INT1 (External Interrupt 1 Input)
ATtiny28L/V
) if the inter-
IL
Port B Input Pins Address – PINB
Bit 76543210
$16 PINB7 PINB6 PINB5 PINB4 PINB3 PINB2 PINB1 PINB0 PINB
Read/WriteRRRRRRRR
Initial Value N/A N/A N/A N/A N/A N/A N/A N/A
The Port B Input Pins address (PINB) is not a register; this address enables access to
the physical value on each Port B pin. When reading PINB, the logical values present on
the pins are read.
Port B as General Digital Input All eight pins in Port B have equal functionality when used as digital input pins.
PBn, general input pin: To switch the pull-up resistors on, the PLUPB bit in the MCUCS
register must be set (one). This bit controls the pull-up on all Port B pins. To turn the
pull-ups off, this bit has to be cleared (zero). Note that if any Port B pins are used for
alternate functions, the pull-up on the corresponding pins are disabled. The port pins are
tri-stated when a reset condition becomes active, even if the clock is not running.
Alternate Functions of Port B All Port B pins are connected to a low-level detector that can trigger the low-level input
interrupt. See “Low-level Input Interrupt” on page 21 for details. In addition, Port B has
the following alternate functions:
• INT1 – Port B, Bit 4
INT1, External Interrupt source 1. The PB4 pin can serve as an external interrupt source
to the MCU. See the interrupt description for details on how to enable and configure this
interrupt. If the interrupt is enabled, the pull-up resistor on PB4 is disabled and PB4 will
not give low-level interrupts.
• INT0 – Port B, Bit 3
1062E–10/01
INT0, External Interrupt source 0. The PB3 pin can serve as an external interrupt source
to the MCU. See the interrupt description for details on how to enable and configure this
interrupt. If the interrupt is enabled, the pull-up resistor on PB3 is disabled and PB3 will
not give low-level interrupts.
39
Page 40

• T0 – Port B, Bit 2
T0, Timer/Counter0 Counter source. See the timer description for further details. If T0 is
used as the counter source, the pull-up resistor on PB2 is disabled and PB2 will not give
low-level interrupts.
• AIN1 – Port B, Bit 1
AIN1, Analog Comparator Negative input. When the on-chip analog comparator is
enabled, this pin also serves as the negative input of the comparator. If the analog comparator is enabled, the pull-up resistors on PB1 and PB0 are disabled and these pins will
not give low-level interrupts.
• AIN0 – Port B, Bit 0
AIN0, Analog Comparator Positive input. When the on-chip analog comparator is
enabled, this pin also serves as the positive input of the comparator. If the analog comparator is enabled, the pull-up resistors on PB1 and PB0 are disabled and these pins will
not give low-level interrupts.
Port B Schematics Note that all port pins are synchronized. The synchronization latches are, however, not
shown in the figures.
Figure 31. Port B Schematic Diagram (Pins PB0 and PB1)
MOS
PULLUP
PBn
RP: READ PORTB PIN
n : 0, 1
PWRDN
PULL-UP PORT B
COMPARATOR DISABLE
RP
TO LOW-LEVEL DETECTOR
TO COMPARATOR
AINn
TA BUS
DA
40
ATtiny28L/V
1062E–10/01
Page 41

Figure 32. Port B Schematic Diagram (Pin PB2)
ATtiny28L/V
MOS
PULLUP
PB2
RP: READ PORTB PIN
SENSE CONTROL
CS02 CS01 CS00
PULL-UP PORT B
RP
TO LOW-LEVEL DETECTOR
Figure 33. PORT B Schematic Diagram (Pins PB3 and PB4)
DATA BUS
TIMER0 CLOCK
SOURCE MUX
MOS
PULLUP
PBn
RP: READ PORTB PIN
n : 3, 4
m : 0, 1
SENSE CONTROL
ISCm1 ISCm0
PULL-UP PORT B
INTm ENABLE
RP
DATA BUS
TO LOW-LEVEL DETECTOR
INTm
1062E–10/01
41
Page 42

Figure 34. PORT B Schematic Diagram (Pins PB7 - PB5)
PBn
MOS
PULLUP
RP:n:READ PORT B PIN
5 - 7
RP
PULL-UP PORT B
TO LOW-LEVEL DETECTOR
Port D Port D is an 8-bit bi-directional I/O port with internal pull-up resistors.
Three I/O memory address locations are allocated for Port D, one each for the Data
Register – PORTD, $12, Data Direction Register – DDRD, $11 and the Port D Input Pins
– PIND, $10. The Port D Input Pins address is read-only, while the Data Register and
the Data Direction Register are read/write.
DATA BUS
Port D Data Register – PORTD
Port D Data Direction Register – DDRD
Port D Input Pins Address – PIND
The Port D output buffers can sink 10 mA. As inputs, Port D pins that are externally
pulled low will source current if the pull-up resistors are activated.
Bit 76543210
$12
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 76543210
$11 DDD7 DDD6 DDD5 DDD4 DDD3 DDD2 DDD1 DDD0 DDRD
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 76543210
$10 PIND7 PIND6 PIND5 PIND4 PIND3 PIND2 PIND1 PIND0 PIND
Read/WriteRRRRRRRR
Initial Value N/A N/A N/A N/A N/A N/A N/A N/A
PORTD7 PORTD6 PORTD5 PORTD4 PORTD3 PORTD2 PORTD1 PORTD0 PORTD
The Port D Input Pins Address (PIND) is not a register; this address enables access to
the physical value on each Port D pin. When reading PORTD, the Port D Data Latch is
read and when reading PIND, the logical values present on the pins are read.
42
ATtiny28L/V
1062E–10/01
Page 43

ATtiny28L/V
Port D as General Digital I/O All eight pins in Port D have equal functionality when used as digital I/O pins.
PDn, general I/O pin: The DDDn bit in the DDRD register selects the direction of this pin.
If DDDn is set (one), PDn is configured as an output pin. If DDDn is cleared (zero), PDn
is configured as an input pin. If PDn is set (one) when configured as an input pin, the
MOS pull-up resistor is activated. To switch the pull-up resistor off, the PDn has to be
cleared (zero), or the pin has to be configured as an output pin. The port pins are tristated when a reset condition becomes active, even if the clock is not running.
Table 19. DDDn Bits on Port D Pins
DDDn PORTDn I/O Pull-up Comment
0 0 Input No Tri-state (high-Z)
0 1 Input Yes PDn will source current if ext. pulled low
1 0 Output No Push-pull Zero Output
1 1 Output NO Push-pull One Output
Note: n: 7,6,...,0, pin number
Figure 35. Port D Schematic Diagram (Pins PD7 - PD0)
RD
MOS
PULLUP
RESET
PDn
WP:
WRITE PORTD
WD:
WRITE DDRD
RL:
READ PORTD LATCH
RP:
READ PORTD PIN
RD:
READ DDRD
n : 0 - 7
RL
RP
R
Q
DDDn
C
WD
RESET
R
Q
PORTDn
C
WP
D
DATA BUS
D
1062E–10/01
43
Page 44

Memory Programming
Program Memory Lock Bits
The ATtiny28 MCU provides two Lock bits that can be left unprogrammed (“1”) or can be
programmed (“0”) to obtain the additional features listed in Table 20. The Lock bits can
only be erased with the Chip Erase command.
Table 20. Lock Bit Protection Modes
Memory Lock Bits
Protection TypeMode LB1 LB2
1 1 1 No memory lock features enabled.
2 0 1 Further programming of the Flash is disabled.
3 0 0 Same as mode 2, and verify is also disabled.
Note: 1. Further programming of the Fuse bits is also disabled. Program the Fuse bits before
programming the Lock bits.
Fuse Bits The ATtiny28 has five Fuse bits, INTCAP and CKSEL3..0.
• When the INTCAP Fuse is programmed (“0”), internal load capacitors are
connected between XTAL1/XTAL2 and GND, similar to C1 and C2 in Figure 2. See
“Crystal Oscillator” on page 4. Default value is unprogrammed (“1”).
• CKSEL3..0 Fuses: See Table 1, “Device Clocking Option Select,” on page 4 and
Ta bl e 5 , “ATtiny28 Clock Options and Start-up Time,” on page 14, for which
combination of CKSEL3..0 to use. Default value is “0010”, internal RC oscillator with
long start-up time.
(1)
The status of the Fuse bits is not affected by Chip Erase.
Signature Bytes All Atmel microcontrollers have a 3-byte signature code that identifies the device. The
three bytes reside in a separate address space.
For the ATtiny28, they are:
1. $000: $1E (indicates manufactured by Atmel)
2. $001: $91 (indicates 2 KB Flash memory)
3. $002: $07 (indicates ATtiny28 device when signature byte $001 is $91)
Calibration Byte The ATtiny28 has one byte calibration value for the internal RC oscillator. This byte
resides in the high byte of address $000 in the signature address space. During memory
programming, the external programmer must read this location, and program it into a
selected location in the the normal Flash program memory. At start-up, the user software must read this Flash location and write the value to the OSCCAL register.
Programming the Flash Atmel’s ATtiny28 offers 2K bytes of Flash program memory.
The ATtiny28 is shipped with the on-chip Flash program memory array in the erased
state (i.e., contents = $FF) and ready to be programmed. This device supports a highvoltage (12V) parallel programming mode. Only minor currents (<1mA) are drawn from
the +12V pin during programming.
The program memory array in the ATtiny28 is programmed byte-by-byte. During programming, the supply voltage must be in accordance with Table 21.
44
ATtiny28L/V
1062E–10/01
Page 45

ATtiny28L/V
Table 21. Supply Voltage during Programming
Part Serial Programming Parallel Programming
ATtiny28 Not applicable 4.5 - 5.5V
Parallel Programming This section describes how to parallel program and verify Flash program memory, Lock
bits and Fuse bits in the ATtiny28.
Signal Names In this section, some pins of the ATtiny28 are referenced by signal names describing
their function during parallel programming. See Figure 36 and Table 22. Pins not
described in Table 22 are referenced by pin name.
The XA1/XA0 pins determine the action executed when the XTAL1 pin is given a positive pulse. The coding is shown in Table 23.
When pulsing WR
or OE, the command loaded determines the action executed. The
command is a byte where the different bits are assigned functions, as shown in Table
24.
Figure 36. Parallel Programming
RDY/BSY
OE
WR
BS
XA0
XA1
+12V
PD1
PD2
PD3
PD4
PD5
PD6
RESET
XTAL1
GND
ATtiny28
VCC
PB7 - PB0
+5V
DATA
1062E–10/01
45
Page 46

Table 22. Pin Name Mapping
Signal Name in
Programming Mode Pin Name I/O Function
RDY/BSY PD1 O
OE
WR
BS PD4 I
XA0 PD5 I XTAL1 Action Bit 0
XA1 PD6 I XTAL1 Action Bit 1
DATA PB7 - PB0 I/O Bi-directional Data Bus (output when OE
.
PD2 I Output Enable (active low)
PD3 I Write Pulse (active low)
“0”: Device is busy programming, “1”: Device is
ready for new command
Byte Select (“0” selects low byte, “1” selects
high byte)
Table 23. XA1 and XA0 Coding
XA1 XA0 Action when XTAL1 is Pulsed
00
0 1 Load Data (High or low data byte for Flash determined by BS)
1 0 Load Command
1 1 No Action, Idle
Load Flash/Signature byte Address (High or low address byte for Flash
determined by BS)
Table 24. Command Byte Coding
is low)
Command Byte Command Executed
1000 0000 Chip Erase
0100 0000 Write Fuse Bits
0010 0000 Write Lock Bits
0001 0000 Write Flash
0000 1000 Read Signature Bytes and Calibration Byte
0000 0100 Read Fuse and Lock Bits
0000 0010 Read Flash
Enter Programming Mode The following algorithm puts the device in parallel programming mode:
1. Apply 4.5 - 5.5V between VCC and GND.
2. Set RESET and BS pins to “0” and wait at least 100 ns.
3. Apply 11.5 - 12.5V to RESET. Any activity on BS within 100 ns after +12V has
been applied to RESET
will cause the device to fail entering programming mode.
46
ATtiny28L/V
1062E–10/01
Page 47

ATtiny28L/V
Chip Erase The Chip Erase command will erase the Flash memory and the Lock bits. The Lock bits
are not reset until the Flash has been completely erased. The Fuse bits are not
changed. Chip Erase must be performed before the Flash is reprogrammed.
Load Command “Chip Erase”
1. Set XA1, XA0 to “10”. This enables command loading.
2. Set BS to “0”.
3. Set DATA to “1000 0000”. This is the command for Chip Erase.
4. Give XTAL1 a positive pulse. This loads the command.
5. Give WR
6. Wait until RDY/BSY goes high before loading a new command.
Programming the Flash A: Load Command “Write Flash”
1. Set XA1, XA0 to “10”. This enables command loading.
2. Set BS to “0”.
3. Set DATA to “0001 0000”. This is the command for Write Flash.
4. Give XTAL1 a positive pulse. This loads the command.
B: Load Address High Byte
1. Set XA1, XA0 to “00”. This enables address loading.
2. Set BS to “1”. This selects high byte.
3. Set DATA = Address high byte ($00 - $03).
4. Give XTAL1 a positive pulse. This loads the address high byte.
a negative pulse. This starts the Chip Erase. RDY/BSY goes low.
C: Load Address Low Byte
1. Set XA1, XA0 to “00”. This enables address loading.
2. Set BS to “0”. This selects low byte.
3. Set DATA = Address low byte ($00 - $FF).
4. Give XTAL1 a positive pulse. This loads the address low byte.
D: Load Data Low Byte
1. Set XA1, XA0 to “01”. This enables data loading.
2. Set DATA = Data low byte ($00 - $FF).
3. Give XTAL1 a positive pulse. This loads the data low byte.
E: Write Data Low Byte
1. Set BS to “0”. This selects low data.
2. Give WR
goes low.
3. Wait until RDY/BSY
(See Figure 37 for signal waveforms.)
F: Load Data High Byte
1. Set XA1, XA0 to “01”. This enables data loading.
2. Set DATA = Data high byte ($00 - $FF).
3. Give XTAL1 a positive pulse. This loads the data high byte.
a negative pulse. This starts programming of the data byte. RDY/BSY
goes high to program the next byte.
1062E–10/01
G: Write Data High Byte
47
Page 48

1. Set BS to “1”. This selects high data.
2. Give WR a negative pulse. This starts programming of the data byte. RDY/BSY
goes low.
3. Wait until RDY/BSY
(See Figure 38 for signal waveforms.)
The loaded command and address are retained in the device during programming. For
efficient programming, the following should be considered:
• The command needs to be loaded only once when writing or reading multiple
memory locations.
• Address high byte only needs to be loaded before programming a new 256-word
page in the Flash.
• Skip writing the data value $FF, that is, the contents of the entire Flash after a Chip
Erase.
These considerations also apply to Flash and signature bytes reading.
Reading the Flash The algorithm for reading the Flash memory is as follows (refer to “Programming the
Flash” for details on command and address loading):
A: Load Command “0000 0010”.
B: Load Address High Byte ($00 - $03).
C: Load Address Low Byte ($00 - $FF).
1. Set OE
2. Set BS to “1”. The Flash word high byte can now be read from DATA.
3. Set OE to “1”.
to “0”, and BS to “0”. The Flash word low byte can now be read at DATA.
goes high to program the next byte.
Programming the Fuse Bits The algorithm for programming the Fuse bits is as follows (refer to “Programming the
Flash” for details on command and data loading):
A: Load Command “0100 0000”.
D: Load Data Low Byte. Bit n = “0” programs and bit n = “1” erases the Fuse bit.
Bit 4 = INTCAP Fuse
Bit 3 = CKSEL3 Fuse
Bit 2 = CKSEL2 Fuse
Bit 1 = CKSEL1 Fuse
Bit 0 = CKSEL0 Fuse
Bits 7 - 5 = “1”. These bits are reserved and should be left unprogrammed (“1”).
E: Write Data Low Byte.
Programming the Lock Bits The algorithm for programming the Lock bits is as follows (refer to “Programming the
Flash” for details on command and data loading):
A: Load Command “0010 0000”.
D: Load Data Low Byte. Bit n = “0” programs the Lock bit.
Bit 2 = Lock Bit2
Bit 1 = Lock Bit1
Bits 7 - 3,0 = “1”. These bits are reserved and should be left unprogrammed (“1”).
E: Write Data Low Byte.
The Lock bits can only be cleared by executing Chip Erase.
48
ATtiny28L/V
1062E–10/01
Page 49

ATtiny28L/V
Reading the Fuse and Lock Bits
Reading the Signature Bytes and Calibration Byte
The algorithm for reading the Fuse and Lock bits is as follows (refer to “Programming
the Flash” for details on command loading):
A: Load Command “0000 0100”.
1. Set OE to “0”, and BS to “0”. The status of the Fuse bits can now be read at
DATA (“0” means programmed).
Bit 4 = INTCAP Fuse
Bit 3 = CKSEL3 Fuse
Bit 2 = CKSEL2 Fuse
Bit 1 = CKSEL1 Fuse
Bit 0 = CKSEL0 Fuse
2. Set BS to “1”. The status of the Lock bits can now be read at DATA (“0” means
programmed).
Bit 2: Lock Bit2
Bit 1: Lock Bit1
3. Set OE
to “1”.
The algorithm for reading the signature bytes and the calibration byte is as follows (refer
to “Programming the Flash” for details on command and address loading):
A: Load Command “0000 1000”.
C: Load Address Low Byte ($00 - $02).
1. Set OE
to “0”, and BS to “0”. The selected signature byte can now be read at
DATA.
C: Load Address Low Byte ($00).
1. Set OE to “0”, and BS to “1”. The calibration byte can now be read at DATA.
2. Set OE to “1”.
Figure 37. Programming the Flash Waveforms
DATA
XA1
XA0
BS
XTAL1
WR
RDY/BSY
RESET
12V
$10 ADDR. HIGH ADDR. LOW DATA LOW
1062E–10/01
OE
49
Page 50

Figure 38. Programming the Flash Waveforms (Continued)
DATA
XA1
XA0
BS
XTAL1
WR
RDY/BSY
RESET
OE
DATA HIGH
+12V
50
ATtiny28L/V
1062E–10/01
Page 51

ATtiny28L/V
Parallel Programming Characteristics
Figure 39. Parallel Programming Timing
t
XLWL
t
DVXH
t
XHXL
t
XLDX
t
XLOL
t
BVWL
t
WLWH
t
WLRL
t
OLDV
t
RHBX
t
WLRH
t
OHDZ
XTAL1
Data & Contol
(DATA, XA0/1, BS)
WR
RDY/BSY
OE
DATA
Parallel Programming Characteristics
TA = 25°C ± 10%, VCC = 5V ± 10%
Symbol Parameter Min Typ Max Unit
V
PP
I
PP
t
DVXH
t
XHXL
t
XLDX
t
XLWL
t
BVWL
t
RHBX
t
WLWH
t
WLRL
t
WLRH
t
XLOL
t
OLDV
t
OHDZ
Programming Enable Voltage 11.5 12.5 V
Programming Enable Current 250.0 µA
Data & Control Valid before XTAL1 High 67.0 ns
XTAL1 Pulse Width High 67.0 ns
Data & Control Hold after XTAL1 Low 67.0 ns
XTAL1 Low to WR Low 67.0 ns
BS Valid to WR Low 67.0 ns
BS Hold after RDY/BSY High 67.0 ns
WR Pulse Width Low 67.0 ns
WR Low to RDY/BSY Low 0.0 2.5 µs
WR Low to RDY/BSY High 0.5 0.7 0.9 ms
XTAL1 Low to OE Low 67.0 ns
OE Low to DATA Valid 20.0 ns
OE High to DATA Tri-stated 20.0 ns
Write
Read
1062E–10/01
51
Page 52

Electrical Characteristics
Absolute Maximum Ratings
Operating Temperature............................. -40°C to +85/105°C
Storage Temperature..................................... -65°C to +150°C
Voltage on Any Pin except RESET
with Respect to Ground.............................-1.0V to VCC + 0.5V
Maximum Operating Voltage ............................................ 6.0V
Voltage on RESET
with Respect to Ground ....-1.0V to +13.0V
DC Current per I/O Pin, except PA2 ........................... 40.0 mA
DC Current PA2 .......................................................... 60.0 mA
DC Current VCC and GND Pin................................. 300.0 mA
DC Characteristics
TA = -40°C to 85°C, VCC = 1.8V to 5.5V (unless otherwise noted)
Symbol Parameter Condition Min Typ Max Units
V
IL
V
IL1
V
IH
V
IH1
V
IH2
V
OL
V
OL
V
OH
I
IL
I
IL
Input Low Voltage (Except XTAL) -0.5 0.3 Vcc
Input Low Voltage XTAL -0.5 0.1 Vcc
Input High Voltage (Except XTAL, RESET)0.6 V
Input High Voltage XTAL 0.7 V
Input High Voltage RESET 0.85 V
Output Low Voltage
Por ts A, D
Output Low Voltage
(3)
(3)
I
= 20 mA, VCC = 5V
OL
= 10 mA, VCC = 3V
I
OL
I
= 25 mA, VCC = 2.0V
OL
Por t A2
Output High Voltage
Por ts A, D
(4)
= -3 mA, VCC = 5V
I
OH
I
= -1.5 mA, VCC = 3V
OH
Input Leakage Current I/O Pin VCC = 5.5V, pin low
(absolute value)
Input Leakage Current I/O Pin VCC = 5.5V, pin high
(absolute value)
*NOTICE: Stresses beyond those ratings listed under
“Absolute Maximum Ratings” may cause permanent damage to the device. This is a stress rating
only and functional operation of the device at
these or other conditions beyond those indicated
in the operational sections of this specification is
not implied. Exposure to absolute maximum rating conditions for extended periods may affect
device reliability.
(1)
(1)
CC
CC
CC
(2)
(2)
(2)
VCC + 0.5 V
VCC + 0.5 V
VCC + 0.5 V
0.6
0.5
1.0
4.3
2.3
8.0 µA
8.0 µA
V
V
V
V
V
V
V
V
52
R
I/O
I/O Pin Pull-up 35.0 122.0 kΩ
Active Mode, VCC = 3V,
3.0 mA
4MHz
Idle Mode VCC = 3V,
1.0 1.2 mA
4MHz
I
CC
Power Supply Current
Power-down
(5)
, VCC = 3V
9.0 15.0 µA
WDT enabled
Power-down
, VCC = 3V
<1.0 2.0 µA
(5)
WDT disabled
ATtiny28L/V
1062E–10/01
Page 53

ATtiny28L/V
DC Characteristics (Continued)
TA = -40°C to 85°C, VCC = 1.8V to 5.5V (unless otherwise noted)
Symbol Parameter Condition Min Typ Max Units
V
I
ACLK
T
ACPD
ACIO
Analog Comparator Input
Offset Voltage
Analog Comparator Input
Leakage Current
Analog Comparator
Propagation Delay
VCC = 5V
= VCC/2
V
IN
VCC = 5V
V
= VCC/2
IN
VCC = 2.7V
= 4.0V
V
CC
-50.0 50.0 nA
Notes: 1. “Max” means the highest value where the pin is guaranteed to be read as low.
2. “Min” means the lowest value where the pin is guaranteed to be read as high.
3. Although each I/O port can sink more than the test conditions (20 mA at VCC = 5V, 10 mA at VCC = 3V) under steady-state
conditions (non-transient), the following must be observed:
1] The sum of all I
2] The sum of all I
exceeds the test condition, VOL may exceed the related specification.
If I
OL
, for all ports, should not exceed 300 mA.
OL
, for port D0 - D7 and XTAL2 should not exceed 100 mA.
OL
Pins are not guaranteed to sink current greater than the listed test conditions.
4. Although each I/O port can source more than the test conditions (3 mA at VCC = 5V, 1.5 mA at VCC = 3V) under steady-state
conditions (non-transient), the following must be observed:
1] The sum of all I
2] The sum of all I
exceeds the test condition, VOH may exceed the related specification.
If I
OH
, for all ports, should not exceed 300 mA.
OH
, for port D0 - D7 and XTAL2 should not exceed 100 mA.
OH
Pins are not guaranteed to source current greater than the listed test conditions.
5. Minimum VCC for power-down is 1.5V.
750.0
500.0
40.0 mV
ns
1062E–10/01
53
Page 54

External Clock Drive Waveforms
Figure 40. External Clock
VIH1
VIL1
External Clock Drive
Symbol Parameter
1/t
t
t
t
t
t
CLCL
CLCL
CHCX
CLCX
CLCH
CHCL
Oscillator Frequency 0.0 1.2 0.0 4.0 0.0 4.0 MHz
Clock Period 833.0 250.0 250.0 ns
High Time 333.0 100.0 100.0 ns
Low Time 333.0 100.0 100.0 ns
Rise Time 1.6 1.6 0.5 µs
Fall Time 1.6 1.6 0.5 µs
:
= 1.8V to 2.7V VCC = 2.7V to 4.0V VCC = 4.0V to 5.5V
V
CC
UnitsMin Max Min Max Min Max
Table 25. External RC Oscillator, Typical Frequencies
R [kΩ] C [pF] f
100.0 70.0 100.0 kHz
31.5 20.0 1.0 MHz
6.5 20.0 4.0 MHz
Note: R should be in the range 3 - 100 kΩ, and C should be at least 20 pF.
54
ATtiny28L/V
1062E–10/01
Page 55

ATtiny28L/V
Typical Characteristics
The following charts show typical behavior. These figures are not tested during manufacturing. All current consumption measurements are performed with all I/O pins
configured as inputs and with internal pull-ups enabled. A sine wave generator with railto-rail output is used as clock source.
The power consumption in Power-down mode is independent of clock selection.
The current consumption is a function of several factors, such as: operating voltage,
operating frequency, loading of I/O pins, switching rate of I/O pins, code executed and
ambient temperature. The dominating factors are operating voltage and frequency. The
current drawn from capacitive loaded pins may be estimated (for one pin) as C
where C
= Load Capacitance, VCC = Operating Voltage and f = Average Switching Fre-
L
• VCC • f,
L
quency of I/O pin.
The parts are characterized at frequencies and voltages higher than test limits. Parts are
not guaranteed to function properly at frequencies and voltages higher than the ordering
code indicates.
The difference between current consumption in Power-down mode with Watchdog
Timer enabled and Power-down mode with Watchdog Timer disabled represents the differential current drawn by the Watchdog Timer.
Figure 41. Active Supply Current vs. Frequency
ACTIVE SUPPLY CURRENT vs. FREQUENCY
18
16
T
A
= 25˚C
VCC = 6.0V
14
12
10
(mA)
I
CC
8
6
4
2
0
VCC = 1.8V
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
VCC = 2.1V
Frequency (MHz)
VCC = 2.4V
VCC = 3.3V
VCC = 3.0V
VCC = 2.7V
VCC = 3.6V
VCC = 5.5V
VCC = 5.0V
VCC = 4.5V
VCC = 4.0V
1062E–10/01
55
Page 56

Figure 42. Active Supply Current vs. V
CC
ACTIVE SUPPLY CURRENT vs. V
FREQUENCY = 4 MHz
8
7
6
5
4
(mA)
CC
I
3
2
1
0
1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
VCC (V)
CC
TA = 25˚C
TA = 85˚C
Figure 43. Active Supply Current vs. VCC, Device Clocked by Internal Oscillator
ACTIVE SUPPLY CURRENT vs. V
DEVICE CLOCKED BY 1.2MHz INTERNAL RC OSCILLATOR
6
cc
5
T = 25˚C
A
4
3
(mA)
cc
I
2
1
0
1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
V
(V)
cc
T = 85˚C
A
56
ATtiny28L/V
1062E–10/01
Page 57

ATtiny28L/V
Figure 44. Active Supply Current vs. VCC, Device Clocked by External 32 kHz Crystal
ACTIVE SUPPLY CURRENT vs. V
DEVICE CLOCKED BY 32 kHz CRYSTAL
4
3.5
3
2.5
2
(mA)
CC
I
1.5
1
0.5
0
1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
VCC (V)
Figure 45. Idle Supply Current vs. Frequency
IDLE SUPPLY CURRENT vs. FREQUENCY
4.5
4
3.5
3
TA = 25˚C
CC
TA = 25˚C
TA = 85˚C
VCC = 6.0V
VCC = 5.5V
VCC = 5.0V
1062E–10/01
2.5
(mA)
I
CC
2
1.5
1
0.5
0
VCC = 1.8V
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
VCC = 2.1V
Frequency (MHz)
VCC = 2.4V
VCC = 2.7V
VCC = 3.6V
VCC = 3.3V
VCC = 3.0V
VCC = 4.5V
VCC = 4.0V
57
Page 58

Figure 46. Idle Supply Current vs. V
CC
(mA)
CC
I
IDLE SUPPLY CURRENT vs. V
FREQUENCY = 4 MHz
1.4
1.2
1
0.8
0.6
0.4
0.2
0
CC
TA = 85˚C
TA = 25˚C
1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
VCC (V)
Figure 47. Idle Supply Current vs. VCC, Device Clocked by Internal Oscillator
0.7
DEVICE CLOCKED BY 1.2MHz INTERNAL RC OSCILLATOR
IDLE SUPPLY CURRENT vs. V
cc
0.6
T = 25˚C
0.5
0.4
(mA)
0.3
cc
I
0.2
0.1
0
1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
V
(V)
cc
A
T = 85˚C
A
58
ATtiny28L/V
1062E–10/01
Page 59

ATtiny28L/V
Figure 48. Idle Supply Current vs. VCC, Device Clocked by External 32 kHz Crystal
IDLE SUPPLY CURRENT vs. V
DEVICE CLOCKED BY 32 kHz CRYSTAL
30
25
20
15
(µA)
CC
I
10
5
0
1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
VCC (V)
Figure 49. Power-down Supply Current vs. V
POWER-DOWN SUPPLY CURRENT vs. V
WATCHDOG TIMER DISABLED
3
CC
TA = 85˚C
TA = 25˚C
CC
CC
TA = 85˚C
2.5
2
(µA)
1.5
CC
I
1
0.5
0
1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
VCC (V)
TA = 70˚C
TA = 45˚C
TA = 25˚C
1062E–10/01
59
Page 60

Figure 50. Power-down Supply Current vs. V
CC
POWER-DOWN SUPPLY CURRENT vs. V
WATCHDOG TIMER ENABLED
70
60
50
40
(µA)
CC
I
30
20
10
0
1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
VCC (V)
CC
TA = 25˚C
TA = 85˚C
Analog comparator offset voltage is measured as absolute offset.
Figure 51. Analog Comparator Offset Voltage vs. Common Mode Voltage (V
CC
= 5V)
18
16
14
12
10
8
Offset Voltage (mV)
6
4
2
0
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Common Mode Voltage (V)
TA = 25˚C
TA = 85˚C
60
ATtiny28L/V
1062E–10/01
Page 61

ATtiny28L/V
Figure 52. Analog Comparator Offset Voltage vs. Common Mode Voltage (VCC = 2.7V)
10
TA = 25˚C
8
6
4
Offset Voltage (mV)
2
0
0 0.5 1 1.5 2 2.5 3
Common Mode Voltage (V)
Figure 53. Analog Comparator Input Leakage Current (V
60
50
40
30
(nA)
ACLK
20
I
TA = 85˚C
= 6V; TA = 25°C)
CC
1062E–10/01
10
0
-10
0 0.5 1.51 2 2.5 3.53 4 4.5 5 6 6.5 75.5
VIN (V)
61
Page 62

Figure 54. Calibrated Internal RC Oscillator Frequency vs. V
CC
CALIBRATED RC OSCILLATOR FREQUENCY vs.
1.28
1.26
1.24
1.22
1.2
(MHz)
1.18
Rc
F
1.16
1.14
1.12
1.1
2 2.5 3 3.5 4 4.5 5 5.5 6
OPERATING VOLTAGE
V
(V)
cc
Figure 55. Watchdog Oscillator Frequency vs. V
1600
CC
T = 25˚C
A
T = 85˚C
A
T = 45˚C
A
T = 70˚C
A
1400
1200
1000
(kHz)
800
RC
F
600
400
200
0
1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
V
(V)
CC
TA = 25˚C
TA = 85˚C
62
ATtiny28L/V
1062E–10/01
Page 63

ATtiny28L/V
Sink and source capabilities of I/O ports are measured on one pin at a time.
Figure 56. Pull-up Resistor Current vs. Input Voltage (VCC = 5V)
120
100
80
(µA)
60
OP
I
40
20
0
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
TA = 25˚C
TA = 85˚C
VOP (V)
Figure 57. Pull-up Resistor Current vs. Input Voltage (V
30
TA = 25˚C
25
TA = 85˚C
20
= 2.7V)
CC
1062E–10/01
(µA)
15
OP
I
10
5
0
0 0.5 1 1.5 2 2.5 3
V (V)
OP
63
Page 64

Figure 58. I/O Pin Sink Current vs. Output Voltage. All pins except PA2 (VCC = 5V)
70
60
50
40
(mA)
OL
I
30
20
10
0
0 0.5 1 1.5 2 2.5 3
TA = 25˚C
VOL (V)
Figure 59. I/O Pin Source Current vs. Output voltage (V
20
18
16
14
12
(mA)
10
OH
I
8
6
4
2
0
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
TA = 25˚C
TA = 85˚C
VOH (V)
TA = 85˚C
= 5V)
CC
64
ATtiny28L/V
1062E–10/01
Page 65

ATtiny28L/V
Figure 60. I/O Pin Sink Current vs. Output Voltage, All Pins Except PA2 (VCC = 2.7V)
25
20
15
(mA)
OL
I
10
5
0
0 0.5 1 1.5 2
TA = 25˚C
TA = 85˚C
VOL (V)
Figure 61. I/O Pin Source Current vs. Output Voltage (V
6
TA = 25˚C
= 2.7V)
CC
5
4
(mA)
3
OH
I
2
1
0
0 0.5 1 1.5 2 2.5 3
TA = 85˚C
VOH (V)
1062E–10/01
65
Page 66

Figure 62. PA2 I/O Pin Sink Current vs. Output Voltage (High Current Pin PA2; TA =
°C)
25
90
80
70
60
50
(mA)
OL
40
I
30
20
10
0
0 0.5 1 1.5 2 2.5 3 3.5 4
VCC = 1.8V
V
(V)
OL
Figure 63. I/O Pin Input Threshold Voltage vs. V
2.5
VCC = 2.4V
(TA = 25°C)
CC
VCC = 3.6V
2
1.5
1
Threshold Voltage (V)
0.5
0
2.7 4.0 5.0
V
CC
66
ATtiny28L/V
1062E–10/01
Page 67

Figure 64. I/O Pin Input Hysteresis vs. VCC (TA = 25°C)
0.18
0.16
0.14
0.12
0.1
0.08
Input Hysteresis (V)
0.06
0.04
0.02
0
2.7 4.0 5.0
V
CC
ATtiny28L/V
1062E–10/01
67
Page 68

Register Summary
Address Name Bit 7Bit 6Bit 5Bit 4Bit 3Bit 2Bit 1Bit 0 Page
$3F SREG I T H S V N Z C page 11
$3E Reserved
... Reserved
$20 Reserved
$1F Reserved
$1E Reserved
$1D Reserved
$1C Reserved
$1B PORTA - - - - PORTA3 PORTA2 PORTA1 PORTA0 page 36
$1A PACR - - - - DDA3 PA2HC DDA1 DDA0 page 36
$19 PINA - - - -PINA3- PINA1 PINA0 page 37
$18 Reserved
$17 Reserved
$16 PINB PINB7 PINB6 PINB5 PINB4 PINB3 PINB2 PINB1 PINB0 page 39
$15 Reserved
$14 Reserved
$13 Reserved
$12 PORTD PORTD7 PORTD6 PORTD5 PORTD4 PORTD3 PORTD2 PORTD1 PORTD0 page 42
$11 DDRD DDD7 DDD6 DDD5 DDD4 DDD3 DDD2 DDD1 DDD0 page 42
$10 PIND PIND7 PIND6 PIND5 PIND4 PIND3 PIND2 PIND1 PIND0 page 42
$0F Reserved
$0E Reserved
$0D Reserved
$0C Reserved
$0B Reserved
$0A Reserved
$09 Reserved
$08 ACSR ACD - ACO ACI ACIE - ACIS1 ACIS0 page 34
$07 MCUCS PLUPB - SE SM WDRF - EXTRF PORF page 17
$06 ICR INT1 INT0 LLIE TOIE0 ISC11 ISC10 ISC01 ISC00 page 19
$05 IFR INTF1 INTF0 -TOV0- - - - page 20
$04 TCCR0 FOV0 - - OOM01 OOM00 CS02 CS01 CS00 page 24
$03 TCNT0 Timer/Counter0 (8-bit) page 25
$02 MODCR ONTIM4 ONTIM3 ONTIM2
$01 WDTCR - - - WDTOE WD E WDP2 WDP1 WDP0 page 26
$00 OSCCAL Oscillator Calibration Register page 28
Notes: 1. For compatibility with future devices, reserved bits should be written to zero if accessed. Reserved I/O memory addresses
should never be written.
2. Some of the status flags are cleared by writing a logical “1” to them. Note that the CBI and SBI instructions will operate on all
bits in the I/O register, writing a one back into any flag read as set, thus clearing the flag. The CBI and SBI instructions work
with registers $00 to $1F only.
ONTIM1
ONTIM0 MCONF2 MCONF1 MCONF0 page 29
68
ATtiny28L/V
1062E–10/01
Page 69

ATtiny28L/V
Instruction Set Summary
Mnemonic Operands Description Operation Flags # Clocks
ARITHMETIC AND LOGIC INSTRUCTIONS
ADD Rd, Rr Add Two Registers Rd ← Rd + Rr Z,C,N,V,H 1
ADC Rd, Rr Add with Carry Two Registers Rd ← Rd + Rr + C Z,C,N,V,H 1
SUB Rd, Rr Subtract Two Registers Rd ← Rd - Rr Z,C,N,V,H 1
SUBI Rd, K Subtract Constant from Register Rd ← Rd - K Z,C,N,V,H 1
SBC Rd, Rr Subtract with Carry Two Registers Rd ← Rd - Rr - C Z,C,N,V,H 1
SBCI Rd, K Subtract with Carry Constant from Reg. Rd ← Rd - K - C Z,C,N,V,H 1
AND Rd, Rr Logical AND Registers Rd ← Rd • Rr Z,N,V 1
ANDI Rd, K Logical AND Register and Constant Rd ← Rd • K Z,N,V 1
OR Rd, Rr Logical OR Registers Rd ← Rd v Rr Z,N,V 1
ORI Rd, K Logical OR Register and Constant Rd ← Rd v K Z,N,V 1
EOR Rd, Rr Exclusive OR Registers Rd ← Rd ⊕=Rr Z,N,V 1
COM Rd One’s Complement Rd ← $FF - Rd Z,C,N,V 1
NEG Rd Two’s Complement Rd ← $00 - Rd Z,C,N,V,H 1
SBR Rd, K Set Bit(s) in Register Rd ← Rd v K Z,N,V 1
CBR Rd, K Clear Bit(s) in Register Rd ← Rd • (FFh - K) Z,N,V 1
INC Rd Increment Rd ← Rd + 1 Z,N,V 1
DEC Rd Decrement Rd ← Rd - 1 Z,N,V 1
TST Rd Test for Zero or Minus Rd ← Rd •=Rd Z,N,V 1
CLR Rd Clear Register Rd ← Rd ⊕=Rd Z,N,V 1
SER Rd Set Register Rd ← $FF None 1
BRANCH INSTRUCTIONS
RJMP k Relative Jump PC ← PC + k + 1 None 2
RCALL k Relative Subroutine Call PC ← PC + k + 1 None 3
RET Subroutine Return PC ← STACK None 4
RETI Interrupt Return PC ← STACK I 4
CPSE Rd, Rr Compare, Skip if Equal if (Rd = Rr) PC ← PC + 2 or 3 None 1/ 2
CP Rd, Rr Compare Rd - Rr Z,N,V,C,H 1
CPC Rd, Rr Compare with Carry Rd - Rr - C Z,N,V,C,H 1
CPI Rd, K Compare Register with Immediate Rd - K Z N,V,C,H 1
SBRC Rr, b Skip if Bit in Register Cleared if (Rr(b) = 0) PC ← PC + 2 or 3 Non e 1/2
SBRS Rr, b Skip if Bit in Register is Set if (Rr(b) = 1) PC ← PC + 2 or 3 None 1/2
SBIC P, b Skip if Bit in I/O Register Cleared if (P(b) = 0) PC ← PC + 2 or 3 None 1/2
SBIS P, b Skip if Bit in I/O Register is Set if (P(b) = 1) PC ← PC + 2 or 3 None 1/2
BRBS s, k Branch if Status Flag Set if (SREG(s) = 1) then PC ← PC + k + 1 None 1/2
BRBC s, k Branch if Status Flag Cleared if (SREG(s) = 0) then PC ← PC + k + 1 None 1/2
BREQ k Branch if Equal if (Z = 1) then PC ← PC + k + 1 None 1/2
BRNE k Branch if Not Equal if (Z = 0) then PC ← PC + k + 1 None 1/2
BRCS k Branch if Carry Set if (C = 1) then PC ← PC + k + 1 None 1/2
BRCC k Branch if Carry Cleared if (C = 0) then PC ← PC + k + 1 None 1/2
BRSH k Branch if Same or Higher if (C = 0) then PC ← PC + k + 1 None 1/2
BRLO k Branch if Lower if (C = 1) then PC ← PC + k + 1 None 1/2
BRMI k Branch if Minus if (N = 1) then PC ← PC + k + 1 None 1/2
BRPL k Branch if Plus if (N = 0) then PC ← PC + k + 1 None 1/2
BRGE k Branch if Greater or Equal, Signed if (N ⊕ V = 0) then PC ← PC + k + 1 None 1/2
BRLT k Branch if Less than Zero, Signed if (N ⊕ V = 1) then PC ← PC + k + 1 None 1/2
BRHS k Branch if Half-carry Flag Set if (H = 1) then PC ← PC + k + 1 None 1/2
BRHC k Branch if Half-carry Flag Cleared if (H = 0) then PC ← PC + k + 1 None 1/2
BRTS k Branch if T-flag Set if (T = 1) then PC ← PC + k + 1 None 1/2
BRTC k Branch if T-flag Cleared if (T = 0) then PC ← PC + k + 1 None 1/2
BRVS k Branch if Overflow Flag is Set if (V = 1) then PC ← PC + k + 1 None 1/2
BRVC k Branch if Overflow Flag is Cleared if (V = 0) then PC ← PC + k + 1 None 1/2
BRIE k Branch if Interrupt Enabled if (I = 1) then PC ← PC + k + 1 None 1/2
BRID k Branch if Interrupt Disabled if (I = 0) then PC ← PC + k + 1 None 1/2
1062E–10/01
69
Page 70

Instruction Set Summary (Continued)
Mnemonic Operands Description Operation Flags # Clocks
DATA TRANSFER INSTRUCTIONS
LD Rd, Z Load Register Indirect Rd ← (Z) None 2
ST Z, Rr Store Register Indirect (Z) ← Rr None 2
MOV Rd, Rr Move between Registers Rd ← Rr None 1
LDI Rd, K Load Immediate Rd =← KNone1
IN Rd, P In Port Rd ← PNone1
OUT P, Rr Out Port P ← Rr None 1
LPM Load Program Memory R0 ←=(Z) None 3
BIT AND BIT-TEST INSTRUCTIONS
SBI P, b Set Bit in I/O Register I/O(P,b) ← 1None2
CBI P, b Clear Bit in I/O Register I/O(P,b) ← 0None2
LSL Rd Logical Shift Left Rd(n+1) ← Rd(n), Rd(0) ← 0 Z,C,N,V 1
LSR Rd Logical Shift Right Rd(n) ← Rd(n+1), Rd(7) ← 0 Z,C,N,V 1
ROL Rd Rotate Left through Carry Rd(0) ← C, Rd(n+1) ← Rd(n), C ← Rd(7) Z,C,N,V 1
ROR Rd Rotate Right through Carry Rd(7) ← C, Rd(n) ← Rd(n+1), C ← Rd(0) Z,C,N,V 1
ASR Rd Arithmetic Shift Right Rd(n) ← Rd(n+1), n = 0..6 Z,C,N,V 1
SWAP Rd Swap Nibbles Rd(3..0) ← Rd(7..4), Rd(7..4) ← Rd(3..0) None 1
BSET s Flag Set SREG(s) ← 1 SREG(s) 1
BCLR s Flag Clear SREG(s) ← 0 SREG(s) 1
BST Rr, b Bit Store from Register to T T ← Rr(b) T 1
BLD Rd, b Bit Load from T to Register Rd(b) ← TNone1
SEC Set Carry C ← 1C1
CLC Clear Carry C ← 0C1
SEN Set Negative Flag N ←=1N1
CLN Clear Negative Flag N ← 0N1
SEZ Set Zero Flag Z ← 1Z1
CLZ Clear Zero Flag Z ← 0Z1
SEI Global Interrupt Enable I ← 1I1
CLI Global Interrupt Disable I ← 0I1
SES Set Signed Test Flag S ← 1S1
CLS Clear Signed Test Flag S ← 0S1
SEV Set Two’s Complement Overflow V=← 1V1
CLV Clear Two’s Complement Overflow V ← 0V1
SET Set T in SREG T=← 1T1
CLT Clear T in SREG T ←=0T1
SEH Set Half-carry Flag in SREG H ← 1H1
CLH Clear Half-carry Flag in SREG H ← 0H1
NOP No Operation None 1
SLEEP Sleep (see specific descr. for Sleep function) None 1
WDR Watchdog Reset (see specific descr. for WDR/timer) None 1
70
ATtiny28L/V
1062E–10/01
Page 71

ATtiny28L/V
Ordering Information
Speed (MHz) Power Supply (Volts) Ordering Code Package Operation Range
4 2.7 - 5.5 ATtiny28L-4AC
ATtiny28L-4PC
ATtiny28L-4MC
ATtiny28L-4AI
ATtiny28L-4PI
ATtiny28L-4MI
1.2 1.8 - 5.5 ATtiny28V-1AC
AT ti n y 28 V- 1 P C
AT ti n y 28 V- 1 M C
AT ti n y 28 V- 1 A I
AT ti n y 28 V- 1 P I
AT ti n y 28 V- 1 M I
32A
28P3
32M1-A
32A
28P3
32M1-A
32A
28P3
32M1-A
32A
28P3
32M1-A
Commercial
(0°C to 70°C)
Industrial
(-40°C to 85°C)
Commercial
(0°C to 70°C)
Industrial
(-40°C to 85°C)
Package Type
32A 32-lead, Thin (1.0 mm) Plastic Quad Flat Package (TQFP)
28P3 28-lead, 0.300" Wide, Plastic Dual Inline Package (PDIP)
32M1-A 32-pad, 5x5x1.0 body, Lead Pitch 0.50mm Micro Lead Frame Package (MLF)
1062E–10/01
71
Page 72

Packaging Information
32A
32-lead, Thin (1.0mm) Plastic Quad Flatpack
(TQFP), 7x7mm body, 2.0mm footprint, 0.8mm pitch.
Dimensions in Millimeters and (Inches)*
JEDEC STADARD MS-026 ABA
9.25 (0.364)
PIN 1 ID
0.45 (0.018)
0.30 (0.012)
PIN 1
8.75 (0.344)
0.80 (0.0315) BSC
0.20 (0.008)
0.09 (0.004)
0º~7º
9.25 (0.364)
8.75 (0.344)
7.10 (0.280)
6.90 (0.272)
0.75 (0.030)
0.45 (0.018)
*Controlling dimensions: Millimeters
SQ
1.20 (0.047) MAX
0.15 (0.006)
0.05 (0.002)
72
ATtiny28L/V
1062E–10/01
Page 73

28P3
ATtiny28L/V
28-lead, Plastic Dual Inline
Package (PDIP), 0.300" Wide, (0.288" body width)
Dimensions in Millimeters and (Inches)*
34.80(1.370)
34.54(1.360)
7.49(0.295)
7.11(0.280)
4.57(0.180)MAX
3.56(0.140)
3.05(0.120)
2.54(0.100)BSC
0.38(0.015)
0.56(0.022)
0.38(0.015)
1.65(0.065)
1.27(0.050)
8.26(0.325)
7.62(0.300)
0º~ 15º REF
10.20(0.400)MAX
1062E–10/01
*Controlling dimension: Inches
REV. A 04/11/2001
73
Page 74

32M1-A
PIN #1 ID
D
D1
1
2
3
E1
E
0
TOP VIEW
P
D2
PIN 1 ID
P
b
BOTTOM VIEW
NOTE 1. JEDEC STANDARD MO-220, Fig 2 (Anvil Singulation), VHHD-2
e
1
2
3
E2
L
A2
A
SIDE VIEW
SYMBOL
A
A1
A2
A3
b
D1 4.75 BSC
D2
E 5.00 BSC
E1 4.75 BSC
E2 1.25 - 3.25
e 0.50 BSC
L 0.30 0.40 0.50
P
0
A3
A1
C
0.08
COMMON DIMENSIONS
(*Unit of Measure = mm)
MIN
0.80 0.90 1.00
0.00 0.02 0.05
- 0.65 1.00
0.20 REF
0.18 0.23 0.30
5.00 BSCD
1.25 - 3.25
- - 0.60
- - 12º
NOM
MAX
NOTE
74
2325 Orchard Parkway
R
R
San Jose, CA 95131
ATtiny28L/V
TITLE
32M1-A, 32-pad, 5x5x1.0mm body, Lead Pitch 0.50mm
06/27/01
Mirco Lead Frame package (MLF)
DRAWING NO. REV
32M1-A
A
1062E–10/01
Page 75

Atmel Headquarters Atmel Product Operations
Corporate Headquarters
2325 Orchard Parkway
San Jose, CA 95131
TEL (408) 441-0311
FAX (408) 487-2600
Europe
Atmel SarL
Route des Arsenaux 41
Casa Postale 80
CH-1705 Fribourg
Switzerland
TEL (41) 26-426-5555
FAX (41) 26-426-5500
Asia
Atmel Asia, Ltd.
Room 1219
Chinachem Golden Plaza
77 Mody Road Tsimhatsui
East Kowloon
Hong Kong
TEL (852) 2721-9778
FAX (852) 2722-1369
Japan
Atmel Japan K.K.
9F, Tonetsu Shinkawa Bldg.
1-24-8 Shinkawa
Chuo-ku, Tokyo 104-0033
Japan
TEL (81) 3-3523-3551
FAX (81) 3-3523-7581
Atmel Colorado Springs
1150 E. Cheyenne Mtn. Blvd.
Colorado Springs, CO 80906
TEL (719) 576-3300
FAX (719) 540-1759
Atmel Grenoble
Avenue de Rochepleine
BP 123
38521 Saint-Egreve Cedex, France
TEL (33) 4-7658-3000
FAX (33) 4-7658-3480
Atmel Heilbronn
Theresienstrasse 2
POB 3535
D-74025 Heilbronn, Germany
TEL (49) 71 31 67 25 94
FAX (49) 71 31 67 24 23
Atmel Nantes
La Chantrerie
BP 70602
44306 Nantes Cedex 3, France
TEL (33) 0 2 40 18 18 18
FAX (33) 0 2 40 18 19 60
Atmel Rousset
Zone Industrielle
13106 Rousset Cedex, France
TEL (33) 4-4253-6000
FAX (33) 4-4253-6001
Atmel Smart Card ICs
Scottish Enterprise Technology Park
East Kilbride, Scotland G75 0QR
TEL (44) 1355-357-000
FAX (44) 1355-242-743
e-mail
literature@atmel.com
Web Site
http://www.atmel.com
BBS
1-(408) 436-4309
© Atmel Corporation 2001.
Atmel Corporation makes no warranty for the use of its products, other than those expressly contained in the Company’s standard warranty
which is detailed in Atmel’s Terms and Conditions located on the Company’s web site. The Company assumes no responsibility for any errors
which may appear in this document, reserves the right to change devices or specifications detailed herein at any time without notice, and does
not make any commitment to update the information contained herein. No licenses to patents or other intellectual property of Atmel are granted
by the Company in connection with the sale of Atmel products, expressly or by implication. Atmel’s products are not authorized for use as critical
components in life support devices or systems.
AT ME L® and AVR® are the registered trademarks of Atmel.
Other terms and product names may be the trademarks of others.
Printed on recycled paper.
1062E–10/01/xM
 Loading...
Loading...