

PRACTICA CONTROL DE VELOCIDAD Y POSICION Diagram
Facultad de Ingeniería
División de Ingeniería Eléctrica
Departamento de Ingeniería de Control
LABORATORIO DE CONTROL
ANALOGICO
P R A C T I C A
CONTROL DE VELOCIDAD Y POSICION
(I n t r o d u c c i ó n)
Octubre 1998
1
CONTROL DE VELOCIDAD
(Introducción)
CONTENIDO
I. Objetivos.
II. Antecedentes.
III. Material y equipo.
IV. Descripción de los Módulos de Velocidad TY36A y
Controlador G36A.
V. Desarrollo de la Práctica:
Transductor tacogenerador de directa.
Transductor de posición.
VI. Hoja de resultados.
I. Objetivos
Al concluir la práctica el alumno conocerá cada elemento de los módulos G36A y TY36A/EVy será
capaz de alambrarlo correctamente
Se familiarizará con el uso de los transductores de velocidad y sus características.
II. Antecedentes
Para una comprensión satisfactoria de esta práctica es necesario que el alumno conozca lo siguiente
Equipo de laboratorio: Manejo del multímetro y del osciloscopio.
Semiconductores: Deberá conocer los conceptos básicos de la función y operación
de diodos, transistores, mos-fets compuertas lógicas y amplificadores
operacionales.
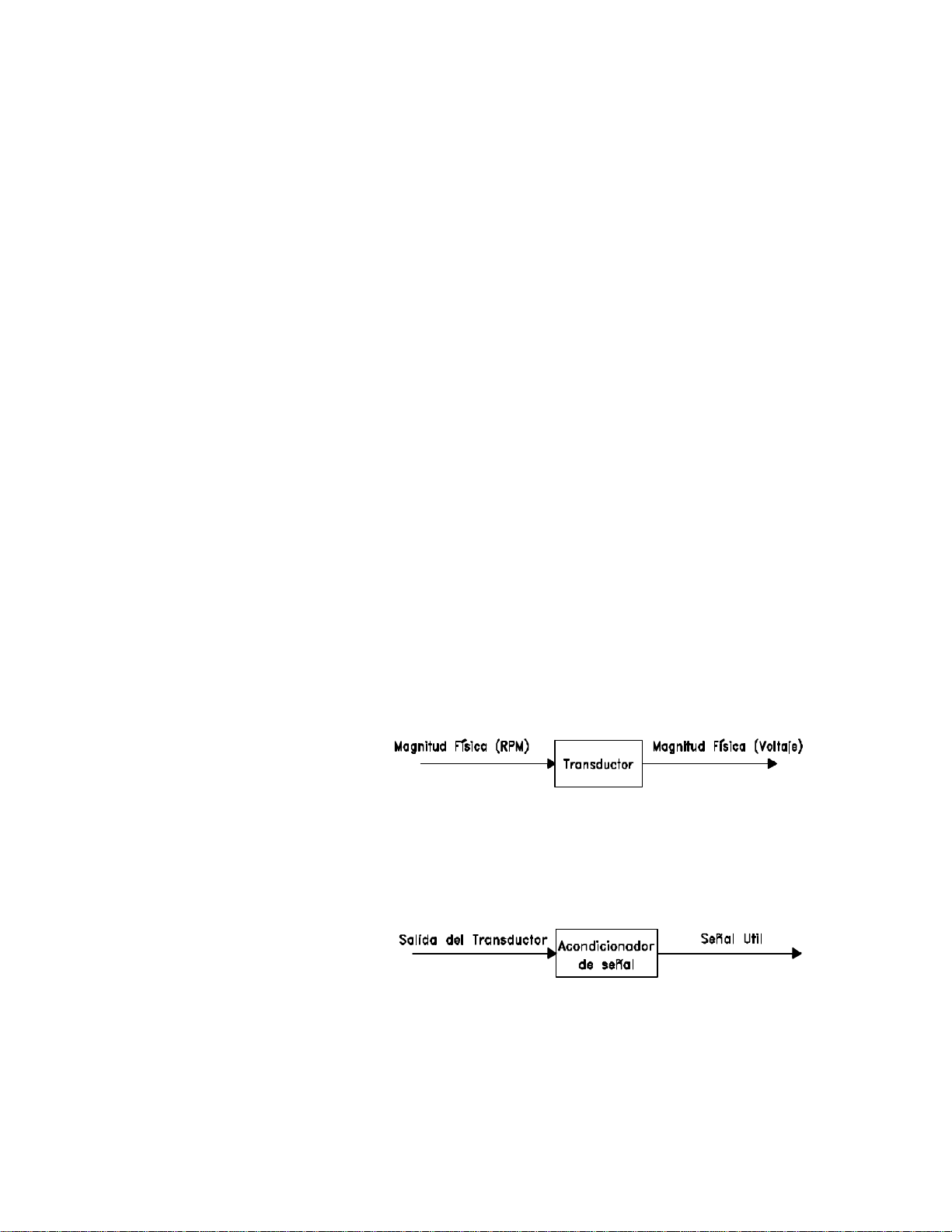
Transductor: Es un dispositivo que realiza la conversión de una magnitud física
en otra.
Por ejemplo:
Acondicionador de señal: Durante la práctica se observará que, la señal de salida de un transductor
es una señal que no se puede utilizar directamente por diversas causas que
se explicarán posteriormente; por esta razón, a la salida de cada
transductor siempre existe una etapa de acondicionamiento de la señal del
transductor para su uso.
2
III. Material y equipo
1 Fuente PS1/EV.
1 Módulo de Velocidad TY36A y Controlador G36A.
1 Multímetro.
1 Juego de 25 cables para conexión.
2 Cables de alimentación.
1 Juego de puntas para multímetro.
1 Cable de conexión DIN 7.
IV. Descripción de la práctica
Para el desarrollo de la práctica se utilizará un sistema que consta de dos módulos, el módulo G36A y el
módulo TY36A/EV, los cuales se describen en esta sección presentando una breve explicación de cada uno de
ellos.
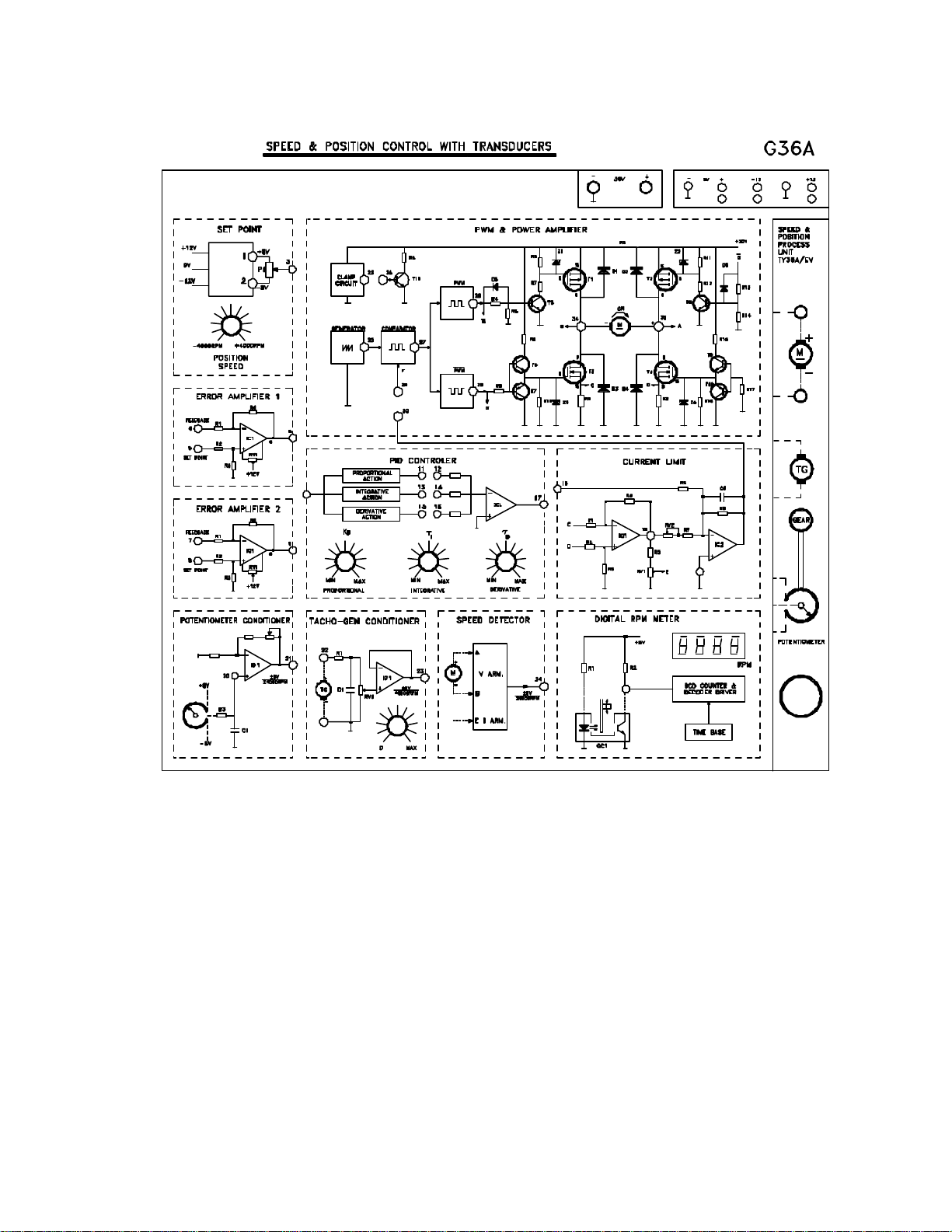
El módulo G36A, que lleva el nombre de Control de Velocidad y Posición con Transductores (“Speed &
Position Control with Transducer”), es un sistema muy útil para estudiar el comportamiento teórico
experimental de las técnicas básicas de control aplicadas a la regulación de la velocidad angular de un motor
de corriente continua.
Como se observa en la figura 2, este módulo se compone a su vez de un conjunto de diez bloques, los cuales
realizan cada uno una función específica. Además, muestra las conexiones que unen a los diferentes bloques,
así como los puntos de medición.
En la parte superior derecha muestra los bornes de conexión con los diferentes voltajes de alimentación. A la
derecha del módulo se encuentran dos bornes para la conexión al motor de corriente directa y una base de 8
polos para el conductor procedente del transductor ubicado en el módulo TY36A/EV.
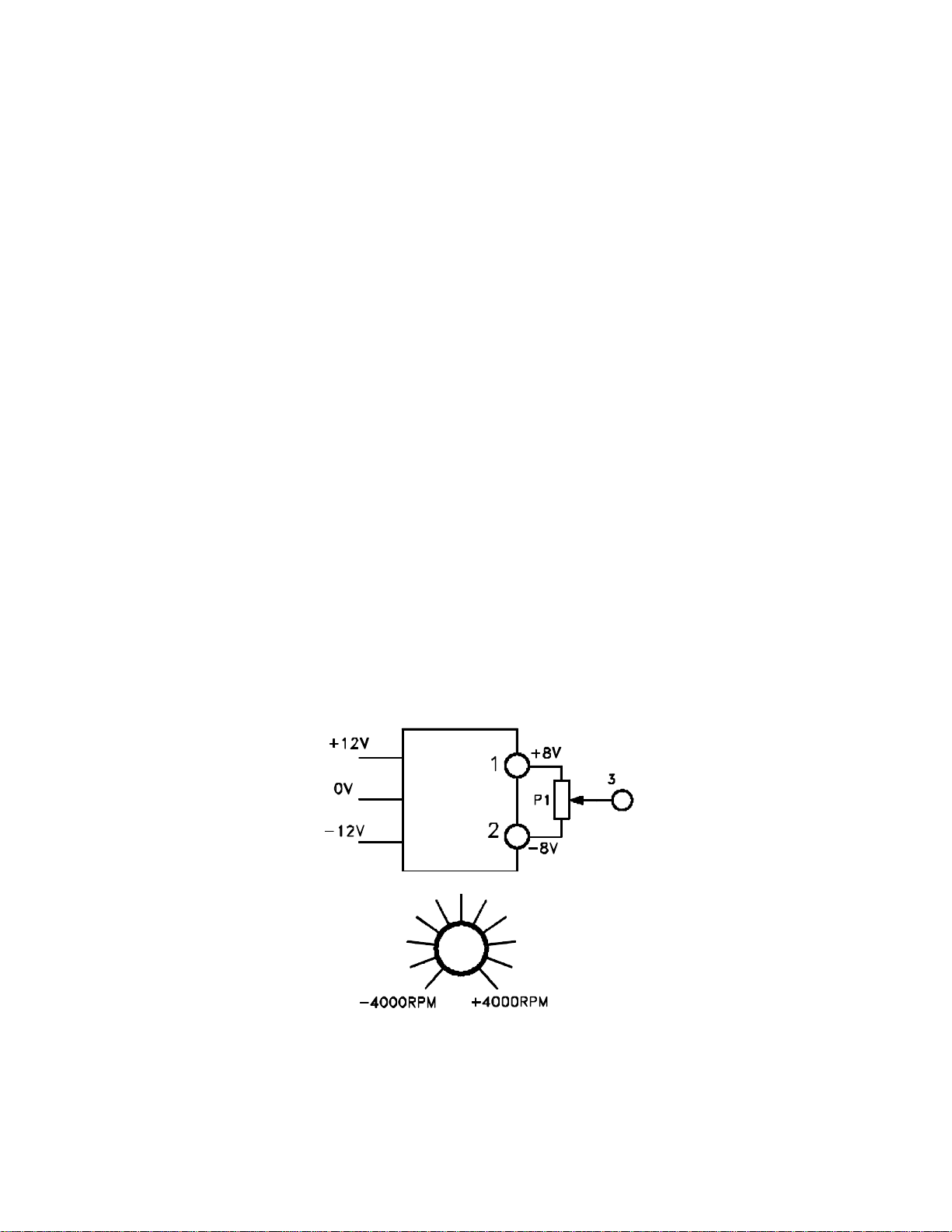
• Set point
Este bloque, denominado “Set Point” o módulo de entrada de referencia tiene la finalidad de
proporcionar la señal de entrada al circuito.
En el circuito mostrado, Z1 y Z2 son reguladores de tensión variable (junto con RV1 y RV2).
Con el potenciómetro P1 se regula el valor de la tensión de salida de este circuito la cual servirá como
señal de referencia del sistema de control.
Fig.1 Diagrama del circuito de la entrada de referencia
3
Fig.2 Módulo G36A
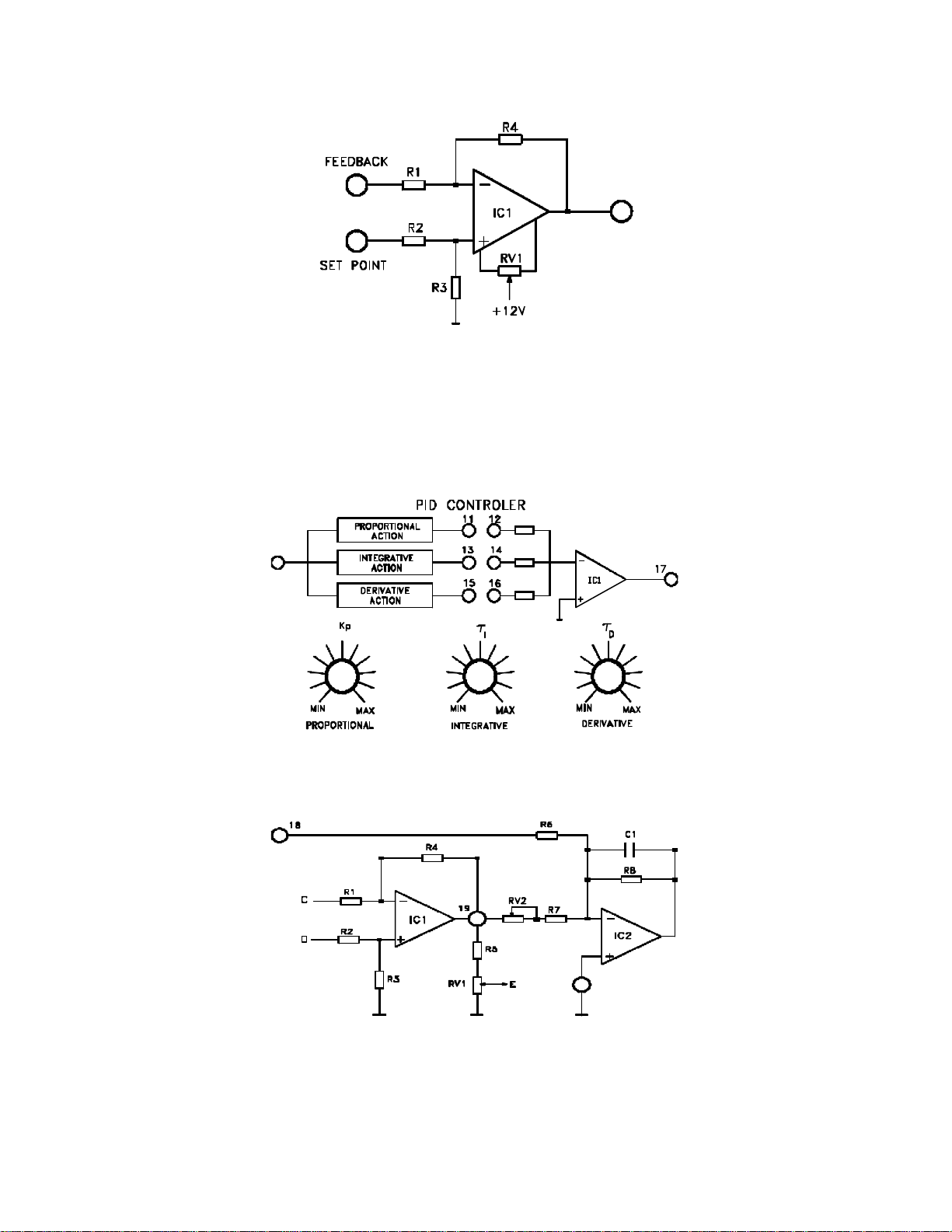
• Amplificador de error
Este bloque realiza la comparación entre el valor de entrada, proveniente del “Set Point” y el valor
obtenido a la salida del sistema, con el objeto de generar la señal de error. (E). El módulo G36A cuenta
con dos bloques de este tipo (“ERROR AMPLIFIER 1” y “ERROR AMPLIFIER 2”), cuyo diagrama
se muestra en la figura 3. El circuito está constituido básicamente por un amplificador operacional en
configuración diferencial, cuya salida es el resultado de la diferencia de las dos entra das presentes
afectada por la razón R4/R1. El potenciómetro RV1 sirve para poner el offset del amplificador
operacional en el nivel de cero.
4
.
Fig.3 Diagrama del amplificador de error
• Controlador PID
Este bloque proporciona un controlador versátil que puede tomar las configuraciones P, I o D por
separado, o bien un control combinado de ellos mediante el puenteo de algunos bornes específicos, ver
la figura 4.
Fig.4 Diagrama a bloques del controlador PID
• Limitador de corriente
Fig.5 Limitador de corriente
La función de esta etapa es la de limitar la corriente del motor que se encuentra en el módulo
TY36A/EV.
 Loading...
Loading...