

Page 1

Repair Center for Powertec Drives and Motors
460 Milford Parkway
Milford, OH . 45150
www.motorsystems.com
513-576-1725
Page 2
Model
1000
Brushless DC Motor Control
NSTALLATION AND
I
PERATION
O
NSTRUCTION MANUAL
I
J
UNE
, 2001
Page 3

Model
Installation and Operation Manual
1000
Page
1
IIII
NTRODUCTION
NTRODUCTION
NTRODUCTIONNTRODUCTION
WHAT IS A GENESIS SERIES BRUSHLESS DC DRIVE ?
The GENESIS series of drives were developed to operate very large Brushless DC motors. Large BLDC
motors were first made by POWERTEC Industrial Corporation in 1987.
Small BLDC motors have been in use for many years. The GENESIS series were the first drives that
were produced to operate really large BLDC motors. They range from fractional Horsepower (HP) to 300 HP.
Brushless DC motors and drives offer three significant benefits to the user:
1. Absolute Speed Control
2. High Efficiency
3. Low Maintenance.
ABSOLUTE SPEED CONTROL
The AC induction motor must “slip” in order to develop torque. “Slip” means that the rotor slows down
when loaded. The amount of slip varies with the load on the motor. When the motor load changes from no
load to full load, speed may change as much as 50 RPM. You must use extraordinary means to employ AC
motors in speed sensitive applications.
Traditional brush-type DC motors have “IR Losses.” These cause the speed of the motor to vary as the
load changes. “IR Losses” account for speed changes of as much as 2% of base speed. You can limit speed
changes to about 0.5% with a very expensive tachometer. That is still 8 or 9 RPM from no load to full load.
You must use extraordinary means to employ brush-type DC motors in speed sensitive applications.
Brushless DC drives and motors do not change speed when the load changes. This is true with the
standard product, right out of the box! This is very good for speed sensitive applications.
HIGH EFFICIENCY
AC induction motors are fairly efficient when operated across the line on plant power. Using an AC
variable speed inverter to control the speed of the AC motor adds power losses as heat in the drive. It also
creates additional losses in the motor. Total losses in the AC system approach 10% at the 100HP level.
Brush-type DC motor systems at 100 HP are relatively efficient, but the losses total about 8%.
Losses average less than 6% in Brushless DC systems at the 100 HP level.
At 100 HP, each percentage of losses is 750 watts. That’s 18 Kilo-Watt-Hours (KWH) per day, or about
6,500 KWH per year. A 2% increase in efficiency results in over $1,000 a year in direct energy savings.
LOW MAINTENANCE
An AC motor running on a variable speed AC drive produces a lot of heat. The motor needs lubrication
more often. It needs extra bearing changes. Heat also shortens the life of the motor.
Brush-type DC motors require frequent brush replacement. They need commutator service and field and
armature rewinding. They also require frequent lubrication and bearing changes due to heat.
Brushless DC motors need greasing, but oversize bearings and low heat output allow long bearing life.
Maintenance on a Brushless DC motor is minimal.
POWERTEC offers the GENESIS series for general purpose industrial use.
POWERTEC also offers a complete line of servo-duty rated drives and motors covering the range from
1/10 to 300 HP.
QUICK START - Page 3 TABLE OF CONTENTS - Page 5
OFFICIAL 6/1/2001
Page 4
Page
2
Model
Installation and Operation Manual
1000
POWER
HS3
HS2
HS1
TAC
RED/GREEN
GREEN
RED
RED
RED
JP1
TB1
CURRENT CONTROLLER
BOARD
JP3
STALL
RED
BUS
RED/GREEN
ENABLE
YELLOW
PL
RED
OV/UV
RED
IOC
RED
SPEED CONTROLLER
BOARD
POWERTEC
JP2
GAIN
STAB
CLIM
ACCEL
DECEL
JOG SPD
MAX SPD
MIN SPD
JP1
CURRENT
LIMIT
P4
REMOVE
FOR
COAST
STOP
LED
RUN
LED
TB2
RUN
123456789101112131415161718
ZERO
SPEED
LED
6/1/2001 © copyright 1997 by Powertec
Page 5

Model
Installation and Operation Manual
1000
Page
3
QQQQ
UICK
UICK
UICK UICK
Follow these steps to quickly set up and operate the Model 1000 Brushless DC drive. If you are not sure
of the procedure for any of the steps, consult the installation section (beginning on page 7).
CONNECTIONS
Connect the proper three-phase AC power from a suitably rated switching device to the input terminals L1, L2,
1.
and L3. Check the nameplate. The sequence of the phases is not important to the drive.
Connect the power system ground to the GND terminal. Make sure the system ground is earth ground.
2.
Connect T1 of the motor to T1 of the drive. Connect T2 to T2, and T3 to T3. The order of connection is
3.
important. The motor will not run with improper motor connections..
Connect a ground wire from the motor’s ground lug to the GND terminal on the drive.
4.
Connect the encoder cable to the motor. Consult the drawing on page 2. The cable used should be a nine-
5.
conductor shielded cable. The colors do not matter, but they aid in tracing wires. Connect the shield at both
ends of the cable (the shield continues inside the motor, but is not connected there).
Connect a 10 Kilo-ohm Speed Potentiometer to TB2 terminals 9 (CW), 10 (Wiper), and 11 (CCW). Connect the
6.
shield of the speed pot cable to TB2 terminal 12.
Connect an Emergency Stop (ESTOP) button between TB2 terminals 6 and 7. Use a normally closed,
7.
maintained open contact type pushbutton.
Connect a normally closed, momentary type, STOP pushbutton between TB2 terminals 7 and 5.
8.
Connect a normally open, momentary type, RUN pushbutton between TB2 terminals 5 and 4.
9.
If desired, connect a normally open, momentary type, JOG pushbutton between TB2 terminals 5 and 13.
10.
If desired, connect a Forward-Reverse (FWD-REV) selector switch to TB2 terminals 17 and 14. Use a single-
11.
pole, two-position switch. The switch should close a contact in the Reverse position.
START UP
Before applying power, turn the speed pot fully counter-clockwise (CCW) and turn the CLIM pot fully counter-
1.
clockwise. Do not connect the motor to a load for its initial run. Set FWD-REV to FWD.
When you apply power, the PWR LED should light up GREEN immediately.
2.
When you apply power, the BUS LED should light up RED immediately.
3.
When power is on, the HS1, HS2, and HS3 LED’s may or may not be on RED, depending on the position of
4.
the motor. Only one or two should light; never all three and never none.
When power is on, the TAC LED may be OFF, RED, GREEN, or ORANGE.
5.
Within 30 seconds, the BUS LED should turn GREEN and the you should hear the charging contactor click as
6.
it energizes. If this does not happen within 30 seconds, shut power off and consult the troubleshooting section.
Press and release the START button. The RUN LED should light. The CURRENT LIMIT LED may come on at
7.
this time because the CLIM pot is all the way counter-clockwise.
Immediately after the RUN LED comes on, the ENABLE LED should light.
8.
Increase the speed pot reference to about 10% of its rotation from the CCW position.
9.
Turn the CLIM pot slowly clockwise. If the motor does not turn (HS1, HS2, HS3, and TAC will start blinking)
10.
before CLIM is at 50%, turn the CLIM pot back down fully CCW. Consult the troubleshooting section.
When the motor begins turning more than 10 RPM, the ZERO SPD LED should light up YELLOW.
11.
Leave the CLIM pot at 50 % and increase the speed pot to 50% of its rotation. Check the motor speed with a
12.
hand-held tachometer. Adjust the MAX speed pot, if necessary to attain 50% speed.
Turn the speed pot to 100% and measure the motor speed. Adjust MAX speed if necessary.
13.
Press the Normal Stop button and start again. Time the acceleration to full speed and set ACCEL time.
14.
Turn speed pot to 0% (CCW) and set MIN SPD potentiometer, if desired.
15.
Set STAB and GAIN to 50% of their rotation. Press the Normal Stop button. ENABLE should go OFF.
16.
Press the JOG button and set the JOG speed, if desired.
17.
Start the drive at any speed and switch the Forward-Reverse switch to check reversing.
18.
The motor is ready for service.
19.
SSSS
TART
TART
TARTTART
OFFICIAL 6/1/2001
Page 6

Page
4
Model
Installation and Operation Manual
1000
REFERENCE PAGES
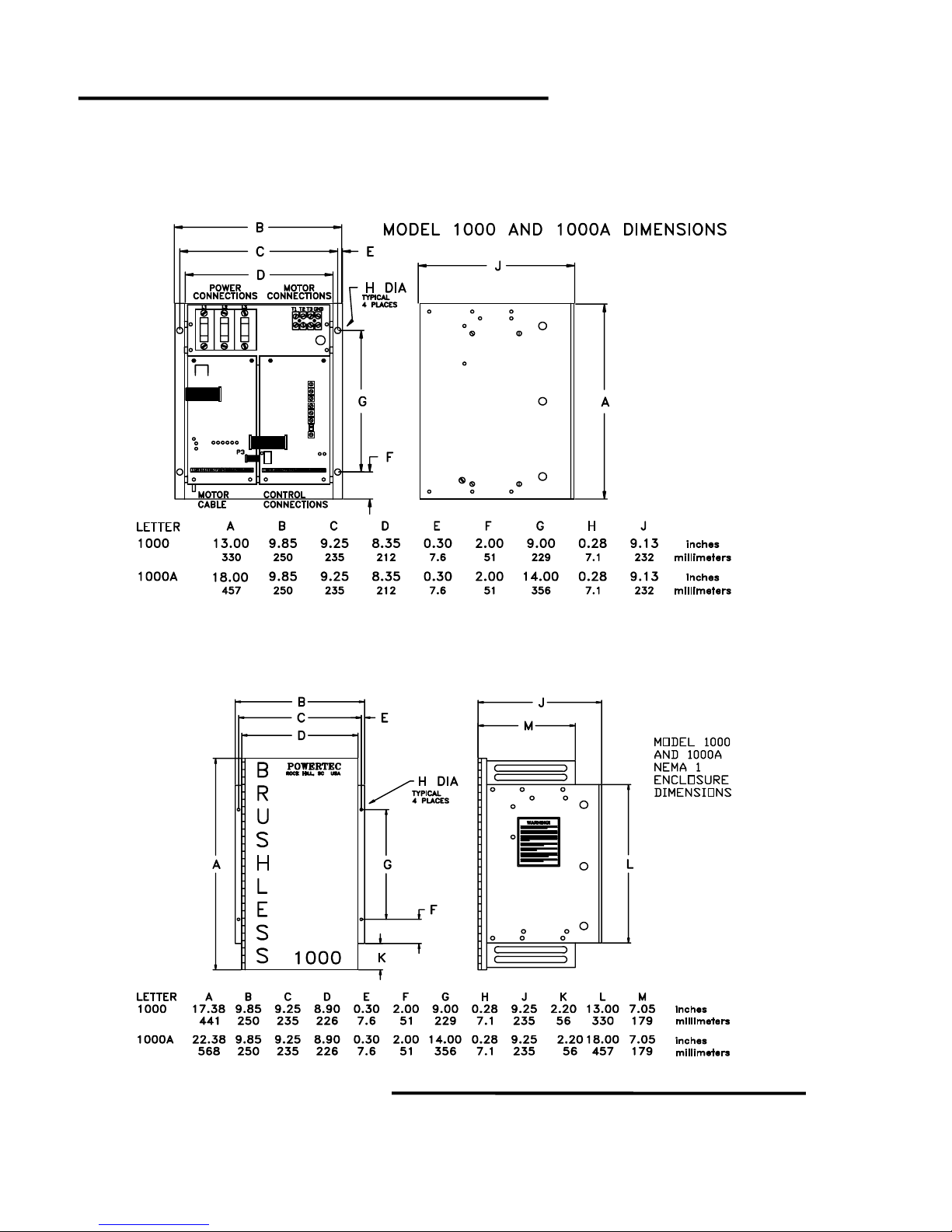
Model 1000 Dimensions Chart ...............................................................................................................8
Model 1000 AC
Model 1000
Contactor Specifications .....................................................................................................................14
Dynamic Braking Resistors ................................................................................................................. 14
Model 1000 Control Connections Table ..............................................................................................16
Terminal Descriptions List ...................................................................................................................18
PLC Interface Suggestions .................................................................................................................20
Digital Mode Notes ..............................................................................................................................22
Analog Versus Digital Operation Comparison .....................................................................................24
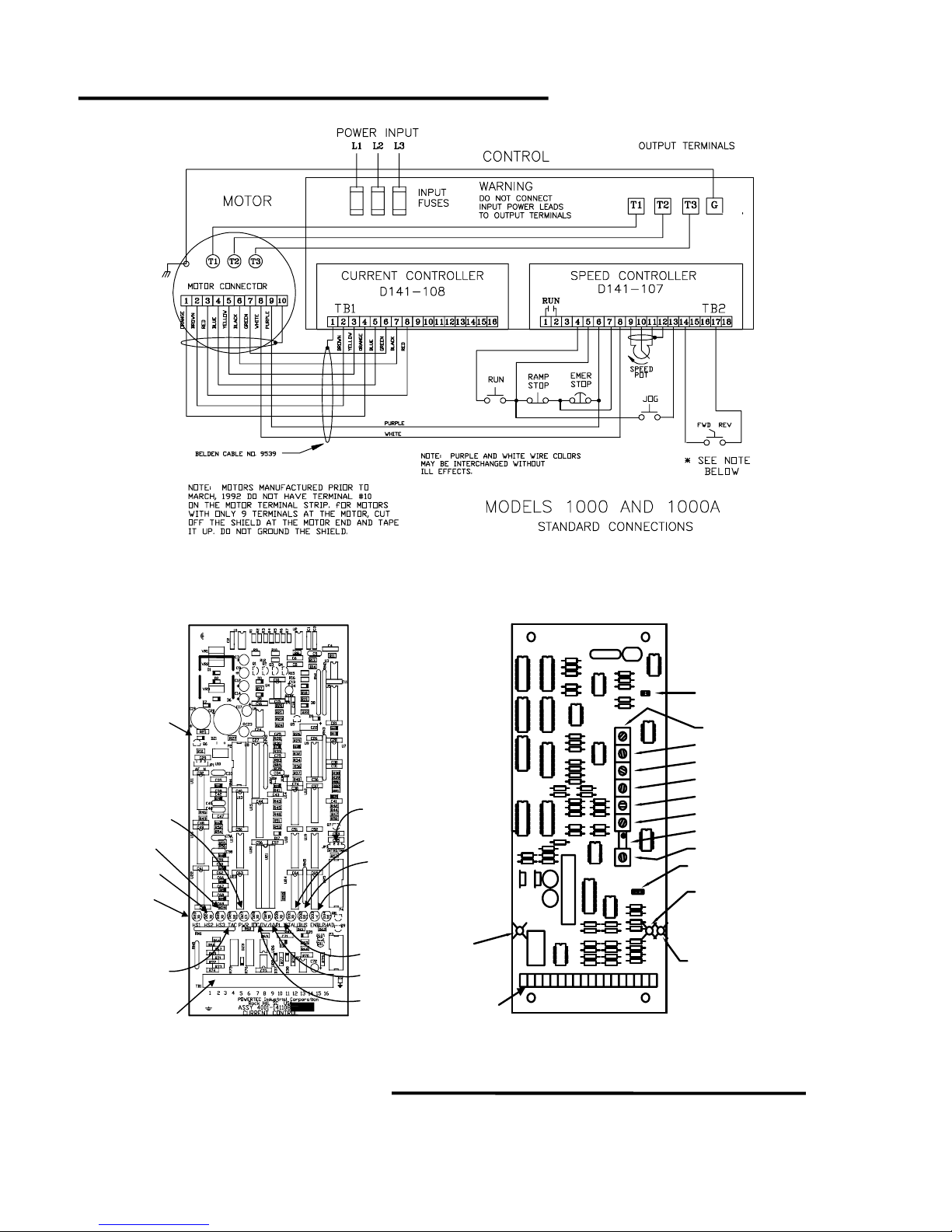
Standard Basic Connection Diagram ................................................................................................... 26
Capacitor Board Location and Layout ..................................................................................................28
Current Controller Board Layout .......................................................................................................... 30
Speed Controller Board Layout ............................................................................................................30
Jumpers List .......................................................................................................................................30
LED Indicators .....................................................................................................................................32
Adjustments .........................................................................................................................................34
Simplified Power Schematic ................................................................................................................36
Semiconductor Diagrams......................................................................................................................36
Transistor Module Static Test ...............................................................................................................38
Diode Bridge Test ................................................................................................................................40
Transistor Leakage Test .......................................................................................................................40
Encoder Waveforms and Connections ................................................................................................. 42
IOC Tests.............................................................................................................................................. 44
OV/UV Tests ......................................................................................................................................... 44
Block Diagram Speed and Current Controller boards .......................................................................... 46
Base Driver board- Layout and Connections........................................................................................ 48
Output
Electrical Ratings Table ................................................................................... 10
Input
Electrical Ratings Table ...................................................................................... 12
6/1/2001 © copyright 1997 by Powertec
Page 7

Model
Installation and Operation Manual
1000
Page
TABLE OF CONTENTS
INTRODUCTION
QUICK START
REFERENCE PAGES
TABLE OF CONTENTS
SPECIFICATIONS
MOTOR PROTECTION
WARRANTY
INSTALLATION
HOW DO I …
Physically Install
Connect AC Power
Connect the Motor
Install an
Install
Dynamic Braking
Connect
Get
RUN
Connect an
Connect a
Connect a
Installation Checklist
..................................................................................................................................................... 1
......................................................................................................................................................... 3
.......................................................................................................................................... 4
...................................................................................................................................... 5
................................................................................................................................................. 6
........................................................................................................................................ 7
............................................................................................................................................................. 7
the Model 1000 Drive ? ........................................................................................................... 9
to the 1000 Drive ? ........................................................................................................... 11
to the 1000 Drive ? ............................................................................................................ 13
Output Contactor
Standard Control Circuits
, Zero Speed,
ANALOG Speed Reference
DIGITAL Speed Reference
DIGIMAX
? ........................................................................................................................... 15
? ................................................................................................................................. 15
? .............................................................................................................. 17
, and
FAULT
? ..................................................................................................................................... 25
...................................................................................................................................... 27
ENABLE
Information ? ............................................................................ 19
?........................................................................................................ 21
? ........................................................................................................... 23
5
START UP
WHAT HAPPENS WHEN I …
Apply Power
Give the Start Command
Give the Speed Command
Make an Adjustment
to the Model 1000 Drive ? ............................................................................................................ 29
to the Model 1000 Drive........................................................................................... 31
to the Model 1000 Drive ........................................................................................ 33
on the Model 1000 Drive................................................................................................. 35
TROUBLESHOOTING
Troubleshooting the Model 1000 Drive............................................................................................................... 37
Troubleshooting Chart - POWER LED ............................................................................................................... 39
Troubleshooting Chart - BUS LED...................................................................................................................... 41
Troubleshooting Chart - HS1, HS2, HS3, and TAC LED’s.................................................................................. 43
Troubleshooting Chart - RUN and ENBL LED’s ................................................................................................. 45
Troubleshooting Chart - TAC and ZERO SPEED LED’s .................................................................................... 47
Troubleshooting Chart - CURRENT LIMIT and PHAD LED’s............................................................................. 49
OFFICIAL 6/1/2001
Page 8
Page
6
Model
Installation and Operation Manual
1000
SPECIFICATIONS
ENVIRONMENTAL
ALTITUDE : Use above 3300 feet (1000 meters) requires de-rating.
De-rate at 3% of full rating for each additional 1100 feet (330 meters).
STORAGE TEMPERATURE : -40 °C to +65 °C (-40 °F to + 150 °F)
AMBIENT TEMPERATURE :
Chassis : Maximum air temperature of 55 °C (131 °F).
Nema1 : Maximum air temperature of 40 °C (104 °F).
RELATIVE HUMIDITY : Less than 95%, non-condensing.
POWER SOURCE :
Voltage : Nominal 230 VAC, 380 VAC, or 460 VAC per nameplate rating.
Voltage Tolerance : -10%, +10% of nominal rated voltage.
Phases : Three (Drive will not operate on single phase).
Frequency : 48 to 62 Hertz
KVA Required : KVA rating of source must be at least equal to Horsepower rating.
Max KVA Rating : 100 KVA (limited by input fuse AIC rating).
DIMENSIONS
Physical Dimensions : See page 8.
Approximate Weights :
1000 chassis : 30 pounds ( 66 kg ).
1000A chassis : 44 pounds ( 97 kg )
1000 Nema1 : 41 pounds ( 90 kg )
1000A Nema1 : 56 pounds ( 123 kg )
PERFORMANCE
Maximum Load : 150% for 1 minute out of 10 minutes.
Speed Regulation : 0.0% (on load change from no load to full load)
Speed Accuracy :
Analog Mode : +/- 1.0% typical with speed pot supplied by internal reference.
Linearity : +/- 0.5% typical with external reference source.
Digital Mode : 0.0 % typical ( +/- ¾ revolution of the motor shaft ).
Displacement power factor : 0.96 typical
ADJUSTMENTS
ACCELERATION TIME : 2 to 90 seconds with JP2 installed; 0.05 to 2 seconds with JP2 removed..
DECELERATION TIME : 2 to 90 seconds with JP2 installed; 0.05 to 2 seconds with JP2 removed..
Acceleration and deceleration times settable in analog mode only.
MAXIMUM SPEED : 600 to 5000 RPM ( motor dependent ), analog mode only.
MINIMUM SPEED : 0 to 15% of MAXIMUM SPEED with 5K speed potentiometer, analog mode only.
JOG SPEED : 0 to 30% of MAXIMUM SPEED, analog mode only.
CURRENT LIMIT : Adjustable from 0% to 150% of rated current, calibrated by Horsepower Resistor.
GAIN : 10 to 1 stiffness ratio
STABILITY : 20 to 1 dynamic response.
JUMPERS
LED INDICATORS
TERMINAL ASSIGNMENTS
SEE PAGE 30
SEE PAGE 32
SEE PAGE 18
6/1/2001 © copyright 1997 by Powertec
Page 9

Model
Installation and Operation Manual
1000
Page
7
IIII
NSTALLATION
NSTALLATION
NSTALLATIONNSTALLATION
Underwriter’s Laboratories® requires this notice for UL® listed equipment.
This Notice applies to Brushless DC Drive Model Numbers 1000 and 1000A.
Do not use this device on a circuit capable of delivering more than
5000 RMS symmetrical Amperes at 500 VAC maximum voltage.
MOTOR PROTECTION CONSIDERATIONS
You are about to install a
protected while it is in service. This is what the Model 1000 series drive provides :
1.
“F” Series
switch to the drive. Look up the method of connection in the drive manual. When the thermal switch opens, the drive
has to be shut down before high temperatures can cause damage.
2. The Model 1000 series drive provides motor current limiting. This protection is adjustable from 0% to 150% of
the drive’s rated output current.
3. The Model 1000 series drive provides an overcurrent trip. This shuts off the drive if peak currents greater than
300% of the RMS rating occur.
4. The Model 1000 drive provides fast clearing fuses in the AC input. It does not provide an input circuit breaker
unless you chose that option at the time of purchase. If you did not purchase an optional circuit breaker with the drive,
you must supply a switch for input power. You must do this in order to meet the requirements of the National Electrical
Code.
5.
GENESIS
Industrial Control Equipment Specification 508. The user is responsible for complying with local codes and practices. If
you decide you need more protection, that protection must shut off the drive.
motors have an internal switch that opens at high winding temperatures. You must connect this
series drives do not provide running overload protection as described in Underwriters Laboratories
GENESIS
Series Brushless DC (BLDC) drive. You need to consider how the motor will be
SUMMARY
Powertec
defects in materials and workmanship for a period of
from the factory.
repair or replace such defective parts as we deem necessary to restore the unit to service. We will make these repairs,
or replacement of parts, at the factory. Shipping charges to and from the factory and on-site service charges are the
responsibility of the user.
does not cover accidental or intentional damage or accidental or intentional abuse. This warranty does not cover
results from defective or incorrect installation, interference with other equipment, or any other situation over which
Powertec
damages.
information. If you find mistakes of fact in this manual, please notify your distributor or
OFFICIAL 6/1/2001
manufactures Model 1000 Series Brushless DC (BLDC) motor controls. We warrant these units against
You must notify us in writing of a defect in materials or workmanship in a warranted unit. We will, at our sole option,
There is no other warranty. We do not warrant the fitness of purpose for the application intended. This warranty
has no control.
This warranty does not cover any other claims, including, but not limited to, special, incidental, or consequential
Powertec
supplies this manual as a guide to the use of our products. We have used our best efforts to compile this
OF WARRANTY AND DISCLAIMER
two years
. This period begins on the date of original shipment
Powertec
at once.
Page 10
Page
8
Model
Installation and Operation Manual
1000
M
ODEL
1000 D
IMENSIONS
CHASSIS UNITS
ENCLOSED UNITS
6/1/2001 © copyright 1997 by Powertec
Page 11
Model
Installation and Operation Manual
1000
Page
H
OW DO
WARNING:
I …
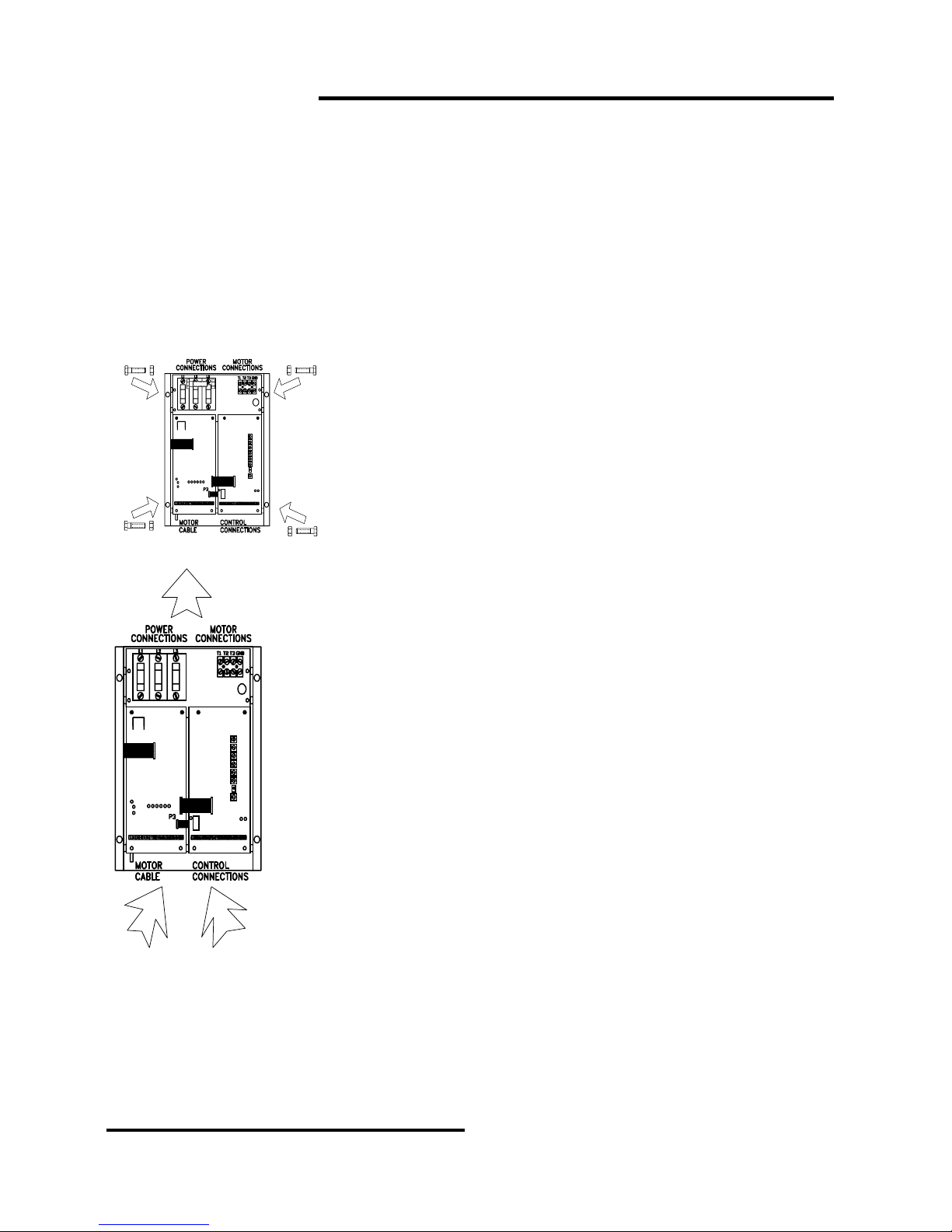
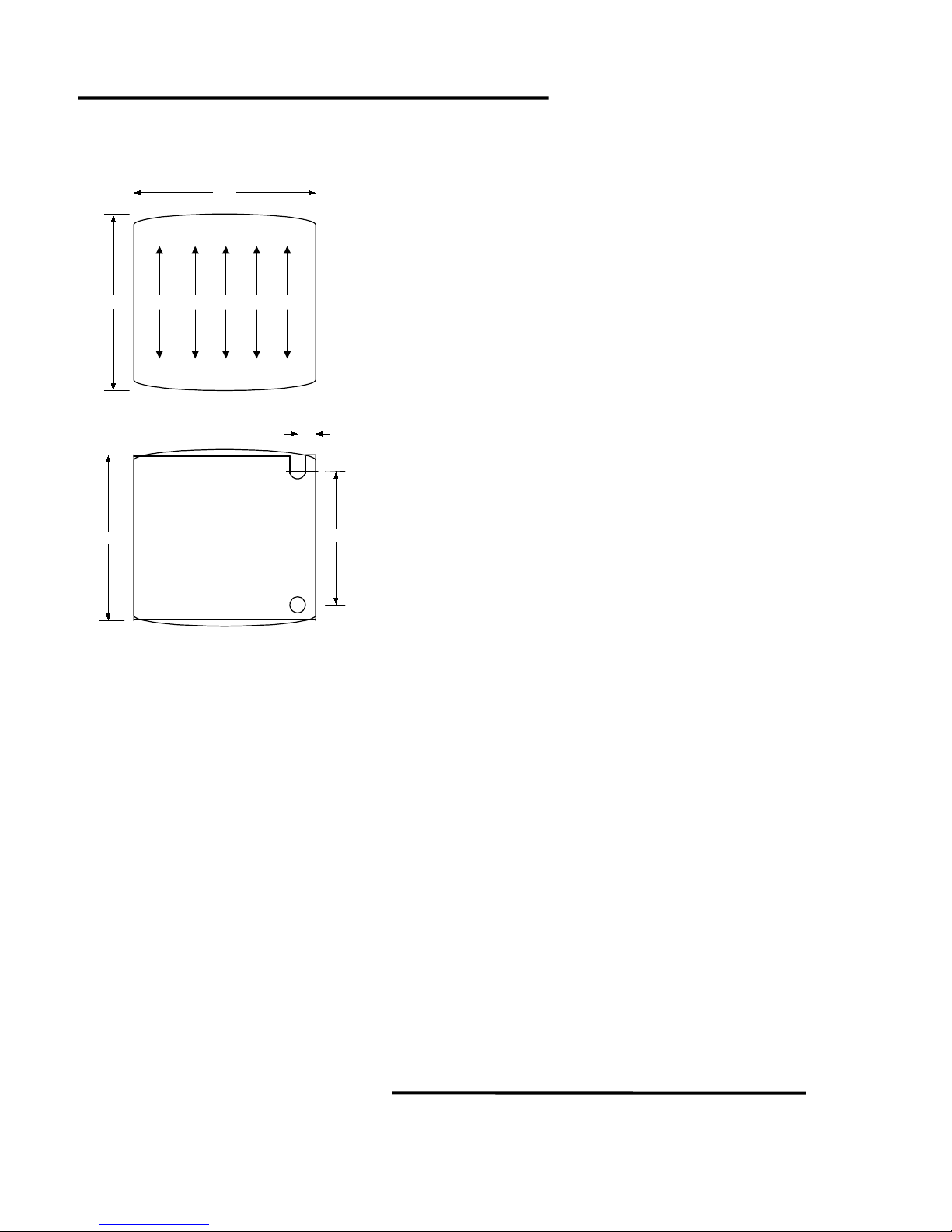
PHYSICALLY INSTALL THE MODEL 1000 DRIVE?
DANGEROUS HIGH VOLTAGES ARE NORMAL IN THIS EQUIPMENT! WHEN THE AC INPUT POWER IS
REMOVED, THE CAPACITORS ARE NOT DISCHARGED AT ONCE! WAIT FIVE MINUTES AND THEN CHECK
TO BE SURE THAT THE CAPACITORS ARE DISCHARGED BEFORE WORKING ON THE DRIVE.
9
WARNING! :
Mount with 1/4-20 bolts
and nuts in 4 places
IF YOU TESTED THE DRIVE BEFORE INSTALLATION, CHECK THE BUS VOLTAGE. YOU WANT TO MAKE
SURE THAT THE BUS CAPACITORS HAVE DISCHARGED.
Mount a Model 1000 series drive of the NEMA 1 style with the fuses at
the top. Do not block air flow around the unit. Free air must flow up through
the fins on the back of the drive.
The temperature of the air around the drive (the ambient) must not
exceed 40°C (104°F) with a relative humidity of 95% or less.
Leave at least 6 inches (150 mm) of open space on all sides of the
NEMA 1 box. Do not mount it directly above a heat source, such as another
drive. If you mount two drive units in line vertically, there must be at least 18
inches (450 mm) of open space between the units.
When you move the Model 1000 series drive chassis to an enclosure,
DO NOT handle the chassis by parts that may bend or come loose. This
applies to the front cover of the drive. Support the chassis by the outside
edges of the heatsink.
Mount the chassis style Model 1000 series drive in an upright position (fuses at
top) inside an enclosure. Mount the chassis this way to promote cooling air flow
through the heatsink fins.
The temperature of the air around the chassis (ambient) may not exceed 55 °C
(131 °F). Relative humidity should be 95% or less, non-condensing.
Avoid mounting one chassis directly above another. This will result in hot air from
the lower chassis flowing up into the upper chassis. Leave at least 12 inches (300
mm) of open space between them.
There must be a minimum free panel space of 3 inches (75 mm) above and
below the chassis. This allows proper air flow through the heatsink fins.
The total heat dissipation within the electrical enclosure, for chassis units,
determines the size. There is a list of the heat output of the Model 1000 series drives
in the table on page 10.
NEMA 1, NEMA 1A, and NEMA 12 ventilated boxes depend upon air flowing
through the enclosure for cooling. They must have an air flow of 1 CFM (cubic feet
per minute) per 10 watts of dissipation (1 cubic meter/minute per 350 watts).
The allowance for totally enclosed units is 1 square foot of enclosure surface per
7 watts of dissipation (75 watts per square meter). Surface area includes front, sides,
top and bottom surface areas. Enclosure surfaces not exposed to cooling air do not
count.
For further information, consult the publication THERMAL MANAGEMENT,
available from your distributor.
Use of the Model 1000 Series drive above 3300 ft (1000 meters) requires de-rating.
If the drive is to be stored, store it in its original packaging in a dry environment.
Storage temperature should be between -40°C and +65°C.
OFFICIAL 6/1/2001
Page 12
Page
10
Model
Installation and Operation Manual
1000
M
ODEL
1000 AC I
NPUT ELECTRICAL RATINGS
NOMINAL
AC LINE
VOLTAGE
230 ½ 0.37 1.4 0.550 35
230 ¾ 0.56 1.8 0.725 42
230 1 0.75 2.4 0.950 60
230 1.5 1.1 3.6 1.450 85
230 2 1.5 4.9 1.950 122
230 3 2.2 7.3 2.900 165
230 5 3.7 12.1 4.825 232
230 7.5 5.6 18.1 7.200 281
‡
230 10 7.5 23.9 9.525 385
380 1 0.75 1.5 0.975 36
380 1.5 1.1 2.2 1.450 55
380 2 1.5 2.9 1.925 70
380 3 2.2 4.4 2.875 105
380 5 3.7 7.3 4.810 142
380 7.5 5.6 10.9 7.150 178
‡
380 10 7.5 14.1 9.250 222
460 2 1.5 2.4 1.910 113
460 3 2.2 3.5 2.800 144
460 5 3.7 5.9 4.750 200
460 7.5 5.6 8.9 7.100 258
460 10 7.5 11.4 9.050 355
‡
460 15 11 17.8 14.150 475
HORSEPOWER
KILO-
WATTS
MAXIMUM
CONTINUOUS
AC LINE
CURRENT
INPUT
KVA
MAXIMUM
HEAT
OUTPUT IN
WATTS
Indicates 1000A models.
N
The Model 1000 Series drives are designed to operate on power line frequencies from 48 to 62 hertz.
The
supplies AC motors, in addition to the drive, must be capable of supporting the starting current of the motors without dropping
more than 10%. If the drive is operating at a line voltage of less than 95% of the nominal line voltage, brief power line
disturbances may trip the drive.
Measure the actual input line voltage while the control is operating the motor in a loaded condition.
generate significant noise back onto the power service. Events that distort the AC waveform may lower the bus voltage. These
may trigger an under-voltage or power loss condition.
problem that is capable of causing destructive results. It can also cause intermittent and annoying problems. The methods
used in the installation of the equipment plays a large part in prevention of electrical noise interference in operation. Any digital
type control requires that extra care be taken in installation. Pay attention to the grounding of the equipment, the shielding of
wires and cables, and the placement of wires in the conduit runs. Pay attention to the sections of this manual that address the
precautions against noise. This also applies to peripheral equipment.
protection. Pay particular attention to power and grounding requirements.
tolerance
Do not measure the input voltage while the drive is not running. This neglects the effects of load on the power source.
Brief power line disturbances will not normally disturb the Model 1000 series drives. The Model 1000 series drives do not
One of the most frequent problems encountered with digital type equipment is electrical noise. Noise is a treacherous
When you use other manufacturer’s equipment in a system, follow their directions regarding noise suppression and
of the input voltage is +10% to -10% of the nominal voltage listed on the nameplate. A service that
OTES
6/1/2001 © copyright 1997 by Powertec
Page 13
Model
Installation and Operation Manual
1000
Page
H
OW DO
TRANSFORMER
L1
L2
I …
L3
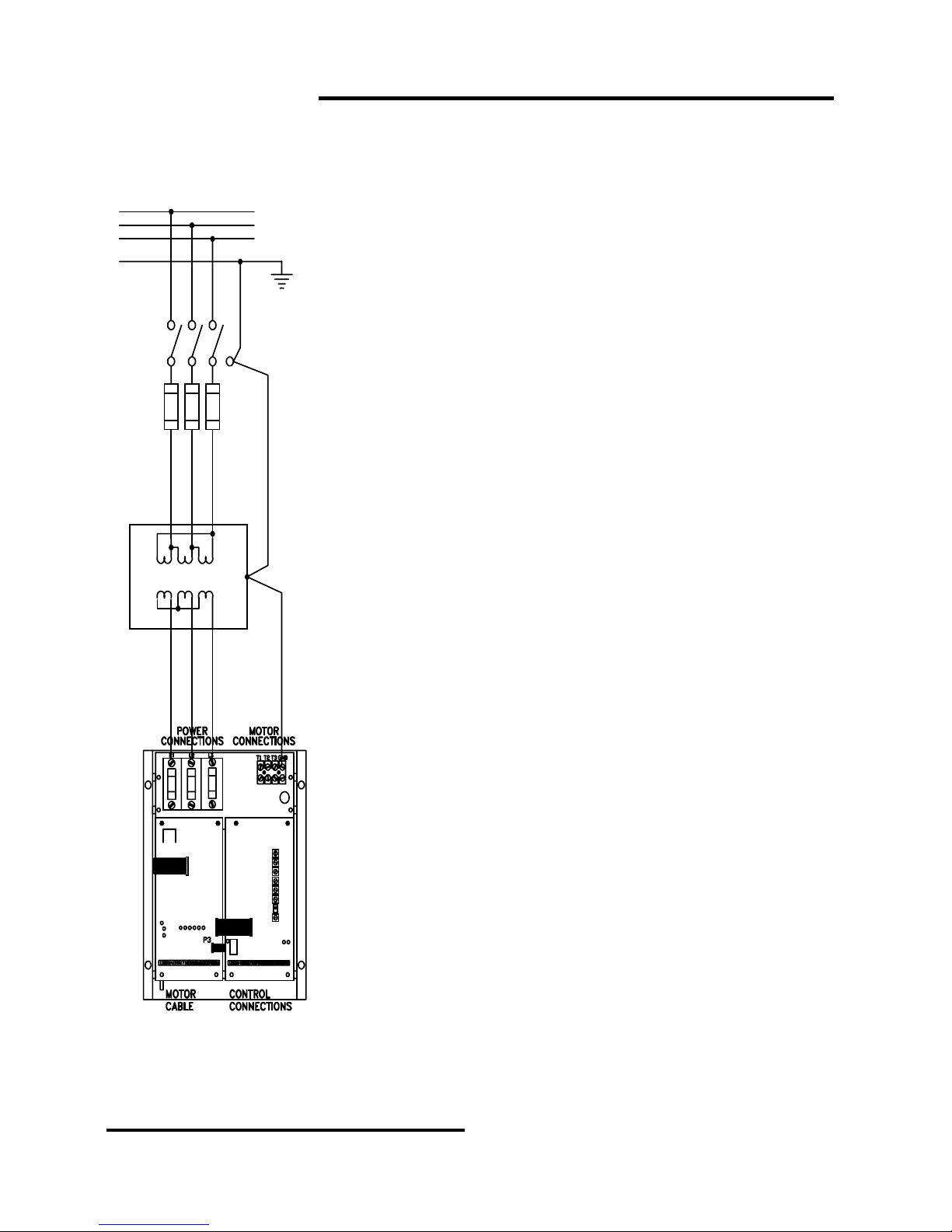
CONNECT AC POWER TO THE 1000 DRIVE?
Standard Model 1000 series Brushless DC drives will not operate on
MAIN
POWER
GND
SEE FUSE
INPUT
BOARD
DRAWING
ON PAGE 8
single phase AC power.
Model 1000 series drives require a three-phase main power source with a
.
KVA rating
However, the branch service rating (in KVA) supplying the drive must not
at least equal to the
HorsePower rating
be more than 10 times the HP rating of the drive. If it is, you may need special
disconnecting means with a higher AC short-circuit current interrupting
capacity.
Model 1000 series drives do not include a disconnect for input power. The
user must supply a switch that meets applicable code requirements.
The maximum Interrupting Capacity (AIC) of the fuses is 5,000 amperes.
You will need a switch with a rating greater than 5,000 amperes if the short
circuit current on the service is greater.
You do not necessarily need an ISOLATION TRANSFORMER for
operation of the drive. You may want to use one, or you might need to meet
local code requirements. You may need to change the voltage level.
If you use a transformer, you will need one with a KVA rating at least as
large as the HP rating of the drive. If you use a transformer, we recommend a
delta/wye winding configuration. We also recommend that the transformer
have taps to raise or lower voltage.
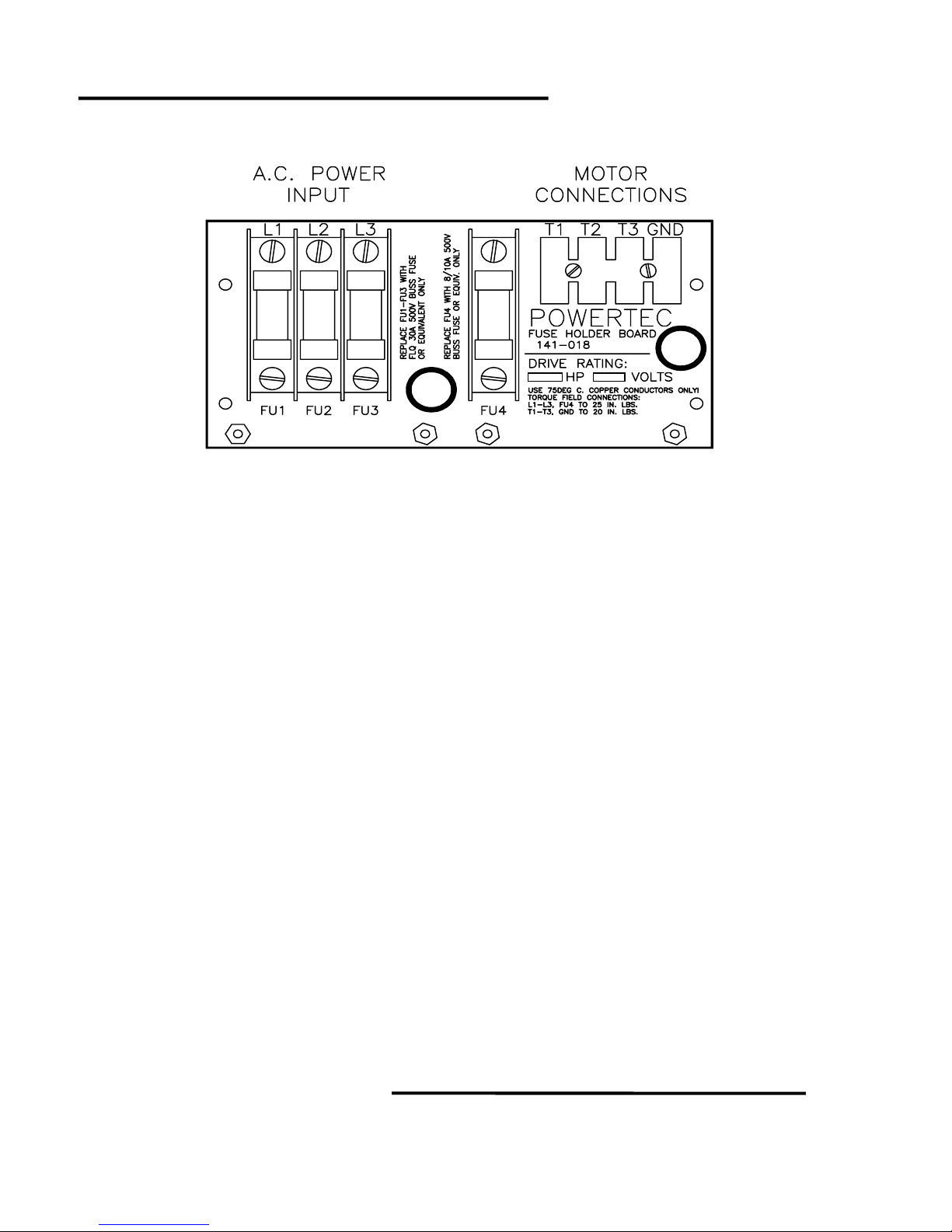
The user protection supplied before the wires determines the sizes of the
power wires to the drive input. The table on the opposite page lists the full load
AC line currents of Model 1000 series drives.
The order of connection of the input phases is not important.
We size the main fuses to protect the semiconductor elements of the unit.
THEY MAY OR MAY NOT MEET THE REQUIREMENTS OF NATIONAL,
STATE AND/OR LOCAL ELECTRICAL CODES. The responsibility for meeting
the branch service protection and other code requirements and safety codes
belongs to the user.
NOTICE: THE AC LINE CURRENT OF THE BRUSHLESS DC DRIVE IS NOT
REPRESENTATIVE OF THE OUTPUT LOAD CURRENT TO THE
MOTOR!
The AC input current is directly proportional to the POWER output of the
motor. The only time the AC line current reaches its full value is when the
motor is operating at full speed with full load.
DO NOT ATTEMPT TO MEASURE MOTOR LOAD BY
MEASURING AC INPUT LINE CURRENT TO THE BLDC MOTOR
CONTROL.
11
of the drive.
OFFICIAL 6/1/2001
Page 14
Page
12
Model
Installation and Operation Manual
1000
MODEL 1000 FUSE BOARD
MODEL 1000 OUTPUT ELECTRICAL RATINGS
NOMINAL
AC LINE
VOLTAGE
230 ½ 0.37 2.2 3.3 68.1 K
230 ¾ 0.56 3.4 5.1 45.3 K
230 1 0.75 4.7 7.0 33.2 K
230 1.5 1.1 7.0 10.5 22.1 K
230 2 1.5 8.5 12.7 18.2 K
230 3 2.2 12.8 19.2 12.1 K
230 5 3.7 22.8 34.2 6.81 K
230 7.5 5.6 31.1 46.6 4.99 K
‡
380 1 0.75 2.7 4.0 56.2 K
380 1.5 1.1 3.9 5.8 39.2 K
380 2 1.5 4.7 7.0 33.2 K
380 3 2.2 7.8 11.7 20.0 K
380 5 3.7 14.1 21.1 11.0 K
380 7.5 5.6 18.8 28.2 8.25 K
‡
460 2 1.5 4.0 6.0 39.2 K
460 3 2.2 6.9 10.3 22.1 K
460 5 3.7 11.6 17.4 13.3 K
460 7.5 5.6 17.1 25.6 9.09 K
460 10 7.5 20.7 31.0 7.50 K
‡
230 10 7.5 41.5 61.1 3.74 K
380 10 7.5 25.0 37.5 6.19 K
460 15 11 31.1 46.6 4.99 K
Indicates 1000A models.
‡
HORSE-
POWER
KILO-
WATTS
MAXIMUM
CONTINUOUS
MOTOR
CURRENT
MAXIMUM
MOMENTARY
MOTOR
CURRENT
NOMINAL
HP
CALIBRATE
RESISTOR
6/1/2001 © copyright 1997 by Powertec
Page 15
Model
Installation and Operation Manual
1000
Page
13
H
OW DO
I …
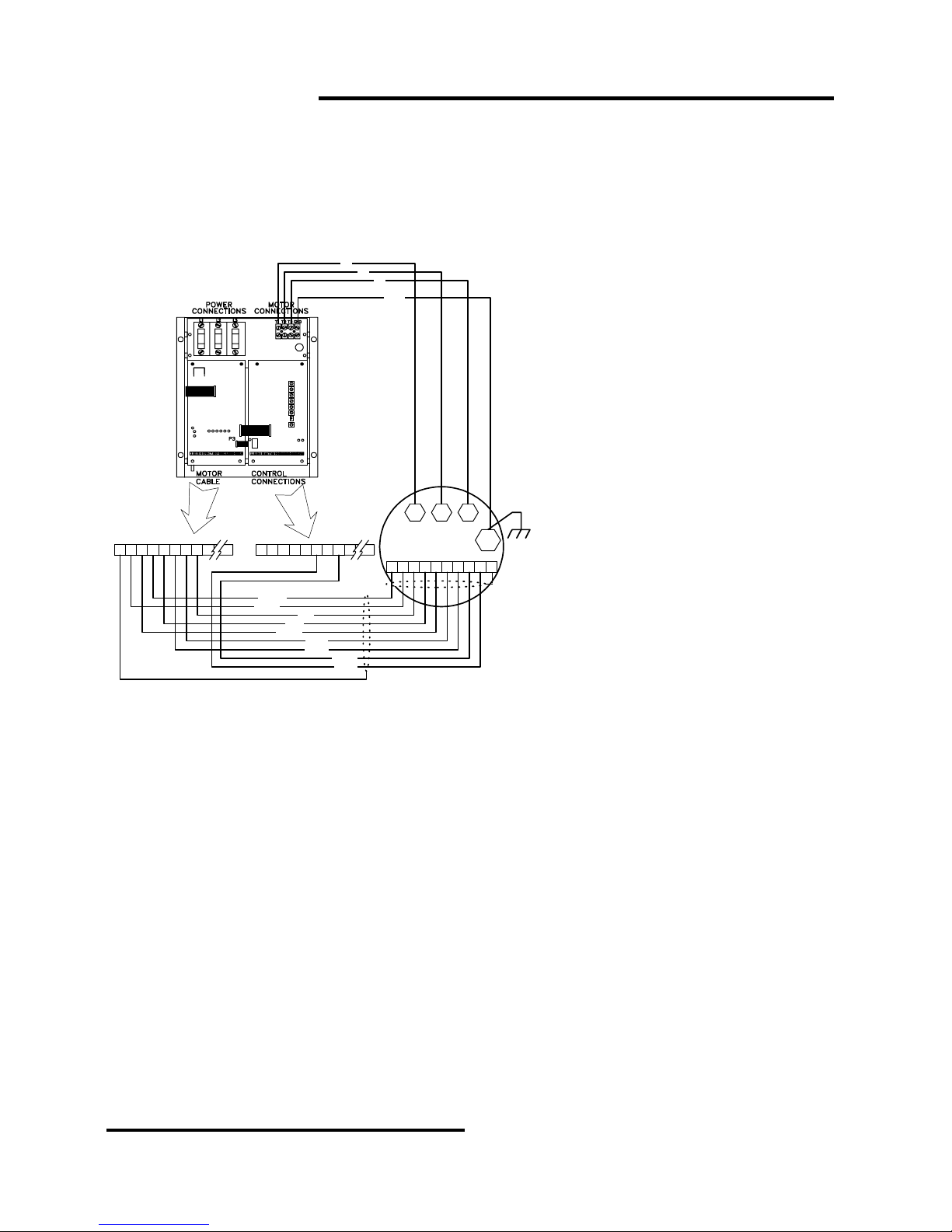
CONNECT THE MOTOR TO THE 1000 DRIVE?
We ship every drive from the factory with A STANDARD CONNECTIONS card.
T1
T2
T3
GND
SEE FUSE
INPUT
BOARD
DRAWING
ON PAGE 8
SEE MOTOR
MANUAL FOR
CORRECT
MOTOR
CONNECTIONS
T1 T2 T3
TB1
1 2 3 4 5 6 7 89
TB2
16
1 2 3 4 5 6 7 89
Orange
Brown
Blue
Yellow
Red
Black
Green
Purple
White
18
BLDC
MOTOR
1 2 3 4 5 6 7 8 9 S
GND
ADDITION TO GROUNDING THE MOTOR FRAME TO ITS MOUNTING, WHICH IS REQUIRED BY
CODE.
The purpose of this separate ground is to equalize the potential between the motor's frame and the drive
chassis. There may be enough impedance to broadcast EMI and RFI even with the motor grounded to its
mounting frame. A direct wire connection between the motor frame and the drive chassis minimizes
interference in other equipment.
The encoder feedback cable must be a shielded cable. Connect the shield to TB1 terminal 1 on the
control end. Standard installation requires a nine-conductor shielded cable (Belden
The colors of this cable correspond to the colors of the wires in the motor and on the connection diagram. You
may interchange the Purple and White wires without ill effect.
The shield must be continuous from the motor to the control. Do NOT ground the shield at intermediate
points. This applies to all junction boxes installed between motor and control.
DO NOT USE THE SHIELD OF THE ENCODER CABLE AS AN ACTIVE CONDUCTOR!
If you want to use the motor thermal protector in a 120 VAC circuit, run it in wiring separate from the
cable. Use seven-conductor shielded cable. In this case, if the cable wire colors are different from the
diagram, you need to check them carefully for proper connections.
Connect the motor lead marked T1 to the
T1 terminal on the drive. Connect the T2 lead
to T2 on the drive, and connect T3 to T3.
Other connections to T1, T2, and T3 at the
motor will vary with the motor. The motor will
not operate correctly if the power wires from
motor to drive are not in the proper order.
Full load motor current determines the
wire size to the motor. The table on the
opposite page lists these currents.
Any high voltage, high frequency
equipment generates EMI and RFI.
YOU
MUST USE METALLIC CONDUIT TO
ENCLOSE MOTOR WIRES BETWEEN THE
MOTOR AND THE DRIVE.
This will minimize
interference.
You must install a ground wire between
the motor frame and the drive chassis. There
is a ground lug in most motors. If there is no
ground lug, make a connection at any bolt in
the motor junction box.
THIS GROUND WIRE MUST BE RUN IN
™
part #9539 or equivalent).
OFFICIAL 6/1/2001
Page 16
Page
14
Model
Installation and Operation Manual
1000
CONTACTOR SPECIFICATIONS
If you want to operate an Output or Dynamic Braking Contactor
directly from the Model 1000 or 1000A, you must choose a coil that
draws less than 50 milliamps DC.
The Output Contactor drawing on page 15 shows the
connections for direct operation of the contactor (use the same
connections for Dynamic Braking). The coil must be 48VDC and
draw less than 50 ma DC (2.4 Watts). This is the most power
available from the Model 1000 series drive’s supplies.
To use a 115VAC or 230 VAC coil, you need a 156-012
Contactor Control board, as shown in the drawing on page 15. Use
the same drawing for the Output Contactor. Maximum current for the
Contactor Control board is 1 Amp at 230 VAC.
You need three normally open power poles and a normally open
auxiliary for an Output Contactor. The contactor does not make or
break with current in the power contacts. Choose the contact ratings
only on the basis of carrying the current.
For Dynamic Braking, you need three normally closed power
poles and a normally open auxiliary. The contacts make with current
present, but they do not break current in the dynamic braking
operation. Choose contacts accordingly.
1.25"
The contactor outline sketched at left is from the SH-04 series by
AEG Industries. The model used for the Output Contactor is part
number SH-04.40 and the Dynamic Braking is SH-04.13. Contact
ratings are 16 Amps.
1.66"
1.54"
1.77"
13 21 31 41
14 22 32 42 A2
TOP VIEW
BOTTOM VIEW
A1
0.19"
DYNAMIC BRAKING RESISTORS
We choose DB resistors for their ability to absorb high inrush currents and to accept large amounts of
power for short periods of time. Typical DB resistors can absorb ten times their power rating for up to five
seconds. The resistors must then cool down to ambient temperature before they can dissipate their full rating
again (usually a few minutes). It is possible to extend the ratings by about three times with power resistors by
forced-air cooling.
You can derive an approximate value of dynamic braking resistor from the bus voltage and the full load
current on the nameplate of the motor:
Bus Voltage X 0.47
Each Resistor Value ~ ---------------------------------- Motor FLA
Three resistors (or groups of resistors) are necessary. The power rating of each should be:
Power > 0.02 X (Buss Voltage)
These formulas are very general, and results will vary from motor to motor. For dynamic braking tailored
to your application, consult
Powertec
Engineering.
6/1/2001 © copyright 1997 by Powertec
2
/ (Resistor Value)
Page 17

Model
Installation and Operation Manual
1000
Page
15
HOW DO
@ 2.4 W
TB2
M
CONTACTOR
3 POLE N.O.
1 N.O. aux
48VDC COIL
I …
T1
M aux
RUN STOP
CONNECT AN OUTPUT CONTACTOR?
T3
GND
T2
M
T3
T1
T2
BLDC
MOTOR
9 10 11 12 13
EMER
STOP
G
181 2 3 4 5 6 7 814
MOTOR
THERMAL
JOG
DO NOT BREAK THE GROUND CONNECTION OR THE CABLE
CONNECTIONS WITH THE OUTPUT CONTACTOR.
When you use an output contactor with the Model 1000, you
MUST interlock the output contactor with the Emergency Stop.
You WILL damage the drive if you do not interlock it.
Requirements for the Model 1000 series are:
1. The contactor must close its main power contacts
BEFORE it enables the drive;
2. The contactor may only open its contacts AFTER
disabling the drive.
It is important to note that the contactor does not make
or break current.
The figure at left shows the connections for a 48VDC output
contactor (such as AEG part number SH-04.40-ODC, which is
available from
POWERTEC
).
In this configuration, the contactor energizes on a run
command and de-energizes ONLY on an emergency stop. The
contactor stays energized during normal stops.
POWERTEC
makes an optional track mount PC board (Part
# 156-012) for sequencing of contactors with AC coils.
H
OW DO
6
I …
CONNECT DYNAMIC BRAKING?
You MUST interlock the contactor with the
Emergency Stop when using Dynamic Braking. You
will damage the drive and/or the resistor banks if
you do not properly interlock the contactor.
The requirements are:
1. The contactor must open the main power
contacts BEFORE the drive is enabled; AND
CONTACTOR
3 POLE N.C.
1 N.O. AUX
COIL < 230VAC
2. The contactor may only close its contacts
AFTER disabling the drive.
The AEG SH-04.13-ODC contactor is suitable
to the circuitry above. The figure on the left shows
the connections for using a POWERTEC 156-012
Contactor Control board to control a larger
contactor or a contactor with an AC coil.
In this configuration, the contactor energizes
when there is a run command and de-energizes
ONLY on an emergency stop. The contactor stays
energized during normal stops.
OFFICIAL 6/1/2001
Page 18

Page
16
Model
M
ODEL
THERMAL
EMERGENCY
RAMP STOP
START /
RUN
RUN
CONTACT
ZERO
SPEED
JOG
REVERSE
FAULT
OUTPUT
ANALOG/
DIGITAL
SWITCH
1000 C
MOTOR
STOP
ONTROL CONNECTIONS
STD:
CONNECT FROM
TB2-8
+24VDC
TB2-6**
TO
ON
STD: N/C PB
TB2-7
+24VDC
TB2-6**
TO
ON
S
: N/C PB
TD
TB2-7
+24VDC
TO TB
ON
STD: N/O PB
TB2-5
TO TB
TB2-1
AND
OUTPUT
COMMON
+24VD
: TB2-16
: TB2-12
C ON
STD: N/O PB FROM
TB2-5
+24VDC
TB2-13
TO
ON
: N/O PB
STD
2-17
TB
TO TB
OUTPUT
COLLECTOR
E
MITTER
+24VDC
REFERENCE TB
: TB1-12
: TB1-13
ON
1-9
TB
IS NOT DRIVE
COMMON
1000
TB2-7
FROM
TB2-5
FROM
2-5
TB2-4
FROM
2-4
TB2-2
TB2-13
TB2-14
FROM
2-14
TB1-10
1-9
Installation and Operation Manual
Normally closed bi-metallic thermal switch in the motor. THE
MOTOR THERMAL SWICH MUST BE USED TO PROPERLY
PROTECT THE MOTOR! When the motor thermal switch opens,
the drive must be shut off to prevent damage to the motor
from overheating.
Voltage must be present to RUN or JOG. When removed,
ENABLE REQUEST is blocked immediately (see page 31) and
all control functions are disabled. Do not connect voltage to
terminal with permanent jumper. In RAMP STOP mode, this is
the only way to stop the drive.
Voltage must be present to maintain RUN mode after a
momentary START is removed. When voltage is removed, the
drive decelerates to zero speed at the DECEL rate and shuts
off if RAMP STOP jumper JP2 is installed. Otherwise drive
shuts off immediately and the motor coasts to a stop.
Voltage must be applied to initiate RUN mode. When it is
removed, drive shuts off unless +24VDC is present at TB2-5.
RUN LED turns on when +24VDC is applied to TB2-4. RUN
LED turns off and RUN relay drops out when voltage is
removed from both TB2-4 and TB2-5.
Normally open dry contact which closes when START is
energized and opens when RUN relay drops out (see above).
The RUN contact does not open on a FAULT unless the fault
removes the voltages from TB2-4 and TB2-5. The RUN contact
does not close on JOG and opens in RAMP STOP mode.
Open collector transistor output referenced to TB2-12. Rated
at 50 mADC @ 50 VDC max. This output operates only in RUN,
JOG, or RAMP STOP modes. The ZERO SPEED output turns
on at about 10 RPM and off at about 5 RPM. The ZERO
SPEED output shuts off if ENABLE LED shuts off.
Voltage must be applied to initiate JOG mode. JOG mode will
be maintained only as long as the voltage is present. When
the voltage is removed, the drive will go to RAMP STOP mode
if COAST TO STOP jumper JP2 is installed. Otherwise the
drive shuts off and the motor coasts to a stop.
Voltage must be applied to make motor go in reverse direction
(forward direction is defined as clockwise rotation of shaft
looking at output shaft end). In analog mode, applying or
removing voltage causes drive to decelerate to zero speed
and accelerate to set speed in opposite direction. In digital
mode, input frequency must be reduced to zero until motor
stops, then re-applied to go in opposite direction.
Optically coupled transistor output (isolated). Rated at 50
mADC @ 50 VDC. Turns on when bus has achieved proper
level. Output is off when any trip occurs.
Apply voltage to switch to DIGITAL mode. TB1-10 and TB1-9
are electrically isolated from the board power supplies. The
negative side of the +24VDC used for the input must be
connected to TB1-9. External frequency must be applied to
terminal 11. Terminal 9 is also common for this frequency.
** NOTE: TB2-6 is a dead terminal. It is used as a tie point.
6/1/2001 © copyright 1997 by Powertec
Page 19

Model
Installation and Operation Manual
1000
Page
17
H
OW DO
I …
CONNECT STANDARD CONTROL CIRCUITS?
If you are using an output contactor or dynamic
braking, see page 15
The table on the opposite page lists the functions,
connections and descriptions of the control circuits of the
Model 1000. Read the descriptions of the operations of
these circuits carefully, since there are some differences
between operation in analog and digital modes.
The control circuits of the POWERTEC Brushless DC
Drive Models 1000 and 1000A motor controls operate on
48 VDC. This results from using the positive and negative
24 VDC unregulated power supplies. Using 48VDC helps to
balance the load of relays and other devices on the
supplies.
The maximum current from each of the raw supplies is
50 milliamps. Due to this supply limitation, you must use an
external supply when you use several external relays.
TB2
16151413121110987654321 1817
TO
MOTOR
THERMAL
THE POWER SUPPLIES OF THE MODELS 1000 AND
1000A SHOULD NOT BE USED FOR EXTERNAL
EQUIPMENT! We make an optional power supply (part #
127-101) available for additional 24 VDC power.
EMER
STOP
JOG
FWD REV
It is possible to operate the control circuits with a
variety of devices. Standard operator devices are O.K.. The
current flowing through these devices is very small. When
START
RAMP
STOP
locating pushbuttons more than 30 feet away from the drive,
you should consider using 120 VAC control circuits.
There is a desire in some cases to place a jumper
across the Emergency Stop terminals, rather than to install ESTOP buttons. Because the drive has a
ramp to stop capability, this could set up an UNSAFE situation. IT IS STRONGLY RECOMMENDED
THAT AN EMERGENCY STOP BUTTON (or an ESTOP relay) BE CONNECTED TO THE DRIVE! This
should be of the MAINTAINED CONTACT TYPE.
HE MOTOR THERMAL MUST BE USED TO
T
PROPERLY
You can use the "two-wire" control method by connecting a contact or switch between terminals 7
and 4 on TB2. Leave off the RAMP STOP and START buttons. This DOES NOT disable the RAMP STOP
function. The only way to disable the RAMP STOP function is removing the RAMP STOP jumper.
The RAMP STOP function in the analog mode shorts the analog reference input to zero. This causes
the motor to decelerate to zero speed before shut-down. In digital mode, you must reduce the external
frequency to zero, or the RAMP STOP circuitry will not function.
Note that the JOG function OVERRIDES the RUN function. If you activate the JOG input while the
RUN mode is in operation, it will change the motor speed to JOG speed.
.
PROTECT THE MOTOR
!
OFFICIAL 6/1/2001
Page 20

Page
18
Model
Installation and Operation Manual
1000
TERMINAL DESCRIPTIONS
- M
ODEL
1000
AND
1000A
TB1 CURRENT CONTROLLER BOARD (141-108)
1 Dedicated Shields and Ground connection
2 HS1 position encoder
3 HS3 position encoder
4 HS2 position encoder
5 HS4 speed encoder
6 HS5 speed encoder
7 Encoder Common for encoder ONLY
8 Encoder +5 VDC for encoder ONLY
9 Isolated Common for terminals 10 and 11
10 Auto/Manual Selection +24 VDC for Digital Mode
11 External Frequency Input +24 VDC Square Wave
12 Collector of FAULT transistor
13 Emitter of FAULT transistor
14 Drive Load output -2VDC = 150%
15 Auxiliary Supply output +15VDC for extra encoder
16 Power Supplies Common
TB2 SPEED CONTROLLER BOARD (141-107)
1 RUN contact closes on RUN
2 RUN contact 1 Amp 125 VAC
3 -24 VDC raw supply 50 ma max
4 RUN input +24VDC to RUN
5 RUN hold +24VDC to maintain RUN
6 SPARE tie point for motor thermal
7 Emergency STOP +24VDC to RUN
8 +24 VDC RUN Logic Supply 50 ma max
9 +10 VDC reference supply
10 Speed reference input 0 to +10VDC
11 Minimum speed connection for speed pot
12 Signal common
13 Jog input +24VDC to JOG
14 Forward/Reverse input +24VDC to reverse **
15 Frequency output open collector to common
16 Zero speed output open collector to common
17 +24VDC raw supply 50 ma max
18 Current reference (velocity error) 0 to +10VDC
TB3 CAPACITOR BOARD (141-106)
1 Horsepower calibration resistor
2 No connection
3 Horsepower calibration resistor
*+24 VDC source for forward/reverse input must be must be from TB2 terminal 17 ONLY.
6/1/2001 © copyright 1997 by Powertec
Page 21

Model
Installation and Operation Manual
1000
Page
19
H
OW DO
I …
GET RUN, ZERO SPEED, FAULT AND ENABLE INFORMATION?
The RUN relay contact at TB2 terminals 1 and 2 is a dry
contact rated at 1 Amp (Resistive load) at 125VAC. You may
use it in an external circuit as long as the voltage does not
exceed 125 VAC (limitation of the terminal strip).
You may use an auxiliary relay if you need more power, or
if you need more contacts, as shown in the drawing at the left.
You should use a 48VDC coil (highly recommended) since this
reduces the burden on one supply. The diode is a general
purpose type rated for at least 1 Amp at 100VDC PIV (1N4002
or equivalent).
The ZERO SPEED output at TB2 terminal 16 is an open
collector NPN transistor, rated at 50 ma at 50 VDC. The
ZERO SPEED transistor turns on at about 10 RPM and turns
off at about 5 RPM
The transistor emitter is at drive common and it may
RUN
TB1
RUN RELAY
AUXILIARY
48VDC Coil
TB2
FAULT
OUTPUT
ISOLATOR
ZERO
SPEED
ZERO SPEED
RELAY
24VDC Coil
16151413121110987654321
ENABLE
48V
DC
FAULT
48V
DC
RUN
16151413121110987654321 1817
-24VDC
+24VDC
FROM TB2
TERM 17
interface directly with a PLC as a sinking input.
The output can operate a relay as shown in the top
drawing on the left. The transistor returns to drive common, so
it is not possible to use a 48VDC relay with the drive’s
supplies. If you use a 24VDC relay, the current must be as low
as possible. The diode is a general purpose type.
The ZERO SPEED relay will chatter at very low speeds.
You can overcome this with a latching circuit that releases at
the first dropout of the zero speed relay.
The FAULT output at TB1 terminals 12 and 13 is the
output transistor of an optical coupler. The coupler’s rating is
100VDC @ 50 ma.
Connect a FAULT relay with a 48VDC coil as shown in
the bottom figure at left. The external FAULT relay energizes
when the drive completes power-up and de-energizes when a
fault occurs. The diode is a general purpose diode.
The Model 1000 does not have a READY output or an
ENABLE output.
We can imitate an ENABLE relay by a combination of the
FAULT output and the RUN output. The RUN relay does not
TB2
drop out on a fault. The combination of the FAULT and the
RUN circuits shows that the drive is in the RUN mode and that
4321
5
there is no fault.
The internal RUN relay drops out on RAMP STOP.
Therefore, do not use the ENABLE relay, as shown in the
diagram, to control dynamic braking or contactor functions.
OFFICIAL 6/1/2001
Page 22

Page
20
Model
Installation and Operation Manual
1000
PLC INTERFACE
The interface of the Models 1000 and 1000A with a process controller is dependent upon
SINKING CONNECTION
the ability of the PC to handle the required signals.
Most of the signals are +24 VDC or 48 VDC (positive
and negative 24 VDC supplies for control), or +10 VDC
for speed. You may also use computer generated
frequency signals for speed in the DIGITAL mode.
DRIVE
+24VDC
TB2
17
PLC
INPUT
MODULE
+V
There are two types of input modules.
ZERO
SPEED
16
INPUT
A "sinking" connection uses the Programmable
Controller’s own power, or an external source (such as
the drive’s power as shown at left, and connects it (sinks
12
SOURCING CONNECTION
COM
it) to common level by the connected input device. The
drawing on the left illustrates the method for using an
open collector output to "sink" the input of a +24 VDC PC
input module. When the transistor turns on, it turns on the
input module.
A “sourcing” connection turns on the PLC module by
supplying power to it. The second figure shows a sourcing
connection. Notice, however, the inverted sense, that is,
when the transistor turns on, the input is not.
You can use the fault output with connections similar
to those in the above figures. You can use a PLC input
DRIVE
ZERO
SPEED
+24VDC
TB2
17
2Kohm
MIN
16
PLC
INPUT
MODULE
+V
INPUT
module, with the FAULT output of the control at TB1
terminals 12 and 13, to sense a FAULT in the drive. The
12
COM
bottom figure illustrates this.
You need to keep in mind that the FAULT isolated
output transistor is "ON" when there is no fault present in
FAULT MONITOR
the drive.
You should accomplish all of the programmable
controller operations of the standard control circuits of the
Models 1000 series controls with relays. These circuits
see 24VDC to ground, but they operate at 48VDC. RUN,
JOG, STOP, REVERSE, and EMERGENCY STOP inputs
operate on +24 VDC supplies. The circuitry, however,
actually operates between positive and negative supplies,
FAULT
TB1
12
PLC
INPUT
MODULE
+V
INPUT
and it is difficult to make connections that do not involve
both power supplies.
13
COM
6/1/2001 © copyright 1997 by Powertec
Page 23

Model
Installation and Operation Manual
1000
Page
21
H
OW DO
I …
CONNECT AN ANALOG SPEED REFERENCE?
The analog speed reference for the Model 1000
and 1000A is 0 to +10 VDC with the positive
connection on TB2 terminal 10 and the common
connection on TB2 terminal 12. Voltages less than 0
VDC have no effect and voltages greater than 10 VDC
become non-linear.
The input impedance is in excess of 100K when
the drive is in RUN mode, and about 30 K when the
drive is not in RUN mode. Using a speed
potentiometer with a resistance greater than 10 Kohms
may result in non-linear operation of the speed pot.
There is a +10VDC source at TB2 terminal 9. The
supply has a 10 ma limit.
There is a 1000 ohm potentiometer, connected as
a rheostat, for MINIMUM SPEED between TB2-11 and
common. With a 10K external speed pot, this allows a
minimum speed adjustment of up to about 9% of full
speed. You may connect the low end of the speed pot
directly to TB2 terminal 12, bypassing the MIN SPD
pot.
Enclose the wires to a speed pot in a shielded
cable, for noise reduction. Connect the shield only at
the drive end, on TB2 terminal 12.
The reference voltage for the input does not have
to come from the reference source at TB2 terminal 9.
You can introduce an external reference voltage
between TB2 terminals 10 (+) and 12 (common). The
speed of the motor varies as the external voltage
varies.
If you use an external “current source” speed
control (such as a 4 to 20 ma signal), you must convert
it to a voltage. Then you may introduce this voltage as
a speed command to TB2 terminal 10 (+) and TB2
terminal 12 (-).
When using a speed pot or an external voltage, it
is not necessary to reduce the speed signal to zero
TB2
TB2
REF IN
+10VDC
CW
REF IN
+10VDC
+
0 TO 10VDC
REFERENCE
CW
SPEED
-
10 OHMS
POT
10K
10 OHMS
MIN
SPEED
16151413121110987654321 1817
16151413121110987654321 1817
before starting the drive. Starting the drive with a speed input already present will not damage the drive,
even at very high accel rates.
The Brushless DC drive operates over very wide speed ranges, so when you want the motor to stop
with the drive in RUN mode, there must be ZERO VDC at the input. Voltages as low as 70 millivolts (0.070
VDC) will cause the motor to turn. Noise levels on the reference line can reach these values. You must be
very careful about shielding and common mode voltages if you expect to operate with references of less
than 0.5 VDC.
OFFICIAL 6/1/2001
Page 24

Page
22
Model
Installation and Operation Manual
1000
DIGITAL MODE NOTES
Since the Brushless DC motor control system is inherently digital,
the performance in the digital mode of operation far exceeds the
performance in the analog mode. In the digital mode the control and
motor respond to a frequency signal fed to the control from an external
source.
In the digital mode, we use the same digital control circuitry for the
speed control as we do in the analog mode. The analog output of the
accel/decel circuits drives a voltage-controlled-oscillator (VCO), which in
turn feeds the digital circuitry. We bypass the VCO in digital mode and
use an external reference frequency to control speed.
Activate the digital mode by applying a nominal +24 VDC voltage to
TB1 terminal 10, positive with respect to TB1 terminal 9 (figure 16).
There is also a jumper next to P2 on the Current Controller board (141-
108) which, when placed in the AF position, switches the control into the
digital mode without energizing terminal 10.
Either of these actions disconnects the control's internal VCO and
looks for a frequency at TB1 terminal 11, which must be positive with
respect to TB1 terminal 9. This frequency signal must meet certain
specifications:
"ON" VOLTAGE: 18 VDC min, 30 VDC max
"OFF" VOLTAGE: less than 1.5 VDC
FREQUENCY: 2X desired RPM (250 frames or smaller)
DUTY CYCLE: 25% min, 75% max
MAXIMUM FREQ: 50 KiloHertz
You can obtain the best tracking by "ramping" the frequency, that is,
changing the frequency gradually. The motor accelerates in current limit if
a frequency is present when the control starts.
The nature of the Brushless DC motor control is that the motor must
return a pulse for each reference pulse supplied, except in current limit!
You will lose pulses if the control goes into current limit, even for a brief
time. So it is best to not change the external frequency so rapidly that the
motor cannot respond without going into current limit.
6/1/2001 © copyright 1997 by Powertec
Page 25

Model
Installation and Operation Manual
1000
Page
23
H
OW DO
I …
CONNECT A DIGITAL SPEED REFERENCE?
Apply +24VDC to TB1 terminal 10 (TB1-10)
with respect to TB1-9 to operate the Model 1000
with a digital reference. Terminal 9 on TB1 is
NOT the same as drive common, so a jumper
from TB2-8 or TB2-17 will NOT switch to digital
mode unless you connect TB1-9 to a drive
common terminal (TB1-16).
With +24VDC on TB1-10, a pulse train at
TB1-11 (with respect to TB1-9) commands the
motor movement. On page 22, there is a list of
the parameters for the pulse train.
You can also activate digital mode by
moving the “AF-N” jumper (JP1) on the Current
TB1
MAN AUTO
+
-
1615141312111098
24
VDC
24VDC
0VDC
TB2
1615141312111098 1817
SPEED
POT
10K
CW
the collector of a transistor (TB2-12 is common) which switches at twice the motor RPM. If you connect a
resistor (at least 1 Kohm minimum) from TB2-17 (+24 VDC) to TB2-15, you generate a signal that can
drive the input of another drive. Connect TB2-15 on the first control to TB1-11 on the second control, and
connect TB2-12 on the first control to TB1-9 on the second. To switch to digital mode, connect TB2-17 on
the first control to TB1-10 on the second control.
Controller board to the AF position (the two left
pins). Placing the jumper in the AF position
makes it unnecessary to energize terminal 10.
While in digital mode, the Speed Controller
board adjustments related to speed do not
function, that is, SPEED POT, MIN SPD, MAX
SPEED, ACCEL, DECEL, and JOG. The pulse
train input governs the movement of the motor.
Almost all motors used with the Model 1000
and 1000A standard drives have 30 pulse per
revolution quadrature encoders. This produces a
120 pulse per revolution (PPR) feedback, so each
pulse put into the drive is a command to turn 3° in
its mechanical rotation.
The pulse train input for a
may come from another
GENESIS
GENESIS
drive, since
drive
there is an output on TB2 (the figure below shows
Model 1000 connections). Terminal 15 (TB2-15) is
With this arrangement, the second motor will
operate at exactly the same speed as the first, as
long as you avoid current limit on the second
control. If the first control encounters current limit,
or changes speed for any other reason, the
second one (the follower) will follow it in speed,
even to zero speed.
OFFICIAL 6/1/2001
Page 26

Page
24
Model
Installation and Operation Manual
1000
ANALOG VERSUS DIGITAL OPERATION
The choice between ANALOG and DIGITAL operation comes down to performance.
In ANALOG mode, a voltage sets the speed of the motor. Due to analog component tolerances, the
best accuracy you can expect is on the order of +/- 1%. It is typically 0.1% or better. The biggest problem
with Brushless DC is not the following of an analog source. It is the obtaining of a clean and stable analog
ANALOG
Value
Speed Regulation 0% from No Load to Full Load
Speed Accuracy +/- 1% of Speed Reference
Speed Drift +/- 1% of Speed Reference
adequate in almost all cases. Changing load does not change the speed of the motor.
Coordinating the speed of two or more motors with analog methods requires some type of trimming
device, such as a dancer or load cell. Analog tolerances and noise make exact coordination very hard.
In DIGITAL mode, the speed of the motor is proportional to the frequency of the pulse train presented
at the TB1 terminals 11 and 9. Each pulse to the drive at these terminals will require a pulse from the
DIGITAL Value
Speed Regulation 0% from No Load to Full Load
Speed Accuracy 1 Motor Feedback Pulse for each Pulse
of Speed Reference
Speed Drift +/- 1 Speed Reference Pulse
really want to be able to set 1749 RPM and get that speed precisely. Motor load does not change the
speed and the speed set by DIGITAL means has a drift of 1 Speed Reference pulse (less than 3° of motor
shaft rotation).
Speed coordination of two or more motors requires DIGITAL means for systems that do not have a
trimming device. Two motors connected by DIGITAL signals will track pulse for pulse.
Even though the motors may be made to operate together or in an exact ratio, there is a possibility
that the mechanical system or the speed setting devices may not be identical. If this is the case, some
type of trimming device may be necessary in a digital system. If the material does not stretch, this will
become apparent in short order.
source to follow. Electrical noise can
be a nasty problem, and you must
use good shielding methods.
In single motor operation, the
motor does not have to follow a
precise speed or a profile generated
by another motor or other source.
The ANALOG speed reference is
motor. The EEPROM multiplier used
in the Current Controller board
determines the effect of the pulse
from the motor. Analog tolerances do
not disturb the system, nor will there
be any temperature drift.
For single motor operation, use
DIGITAL methods where precise
speeds are important, that is, if you
6/1/2001 © copyright 1997 by Powertec
Page 27

Model
Installation and Operation Manual
1000
Page
25
H
OW DO
I …
CONNECT A DIGIMAX®?
The DIGIMAX® is a
crystal-based Speed or Ratio
controller. It creates a train of
pulses to command the
movement of a motor when
the drive is operating in digital
speed mode.
A suitable train of pulses
applied at TB1 terminal 11
(with respect to TB1-9) of the
Model 1000 commands the
drive to turn the motor 3° for
each pulse. However, the
drive’s routine adjustments
such as MIN SPEED, MAX
SPEED, ACCEL, DECEL, and
JOG SPEED are not
functional. The DIGIMAX
supplies these functions.
The wiring diagram at left
shows all the basic
connections to the DIGIMAX.
Not all of them are necessary
for all installations. For
instance, external frequency is
only needed for slave mode.
The power, ground, and
shield connections on
DIGIMAX TB1 are necessary.
The jumper from TB1-4 goes
to a screw in the back plate.
The pulse train comes from DIGIMAX TB1 terminals 11(+) and 10(-). It is applied to the Model 1000
TB1 terminals 11(+) and 9(-).
The MAN/AUTO switch may be left out. You can make a straight connection from DIGIMAX TB1-7 to
Model 1000 TB1-10. Even this connection may be left off if the Current Controller board jumper JP1 is in
the AF position (see page 23).
The DIGIMAX control inputs are on TB2 terminals 5 through 10. These inputs require +24VDC. TB2
terminal 4 is the common connection for these isolated inputs. RUN (terminal 5) and ESTOP (terminal 7)
are required for DIGIMAX operation. PRESET (terminal 6) is an optional second speed. The REVERSE
input (terminal 8) must operate in conjunction with the drive’s reverse input, if it is used.
The EXTERNAL FREQUENCY input (TB2 terminals 13 and 14) is only used in the SLAVE mode. It is
used when the DIGIMAX is to follow another pulse train from another DIGIMAX or drive.
The input at DIGIMAX TB2 terminals 15, 16, and 17 in an optional motor load reading signal.
For further information, refer to the DIGIMAX Installation and Operation Manual.
OFFICIAL 6/1/2001
Page 28

Page
26
Model
Installation and Operation Manual
1000
NOTICE:
ANY POWER EQUIPMENT SWITCHING HIGH VOLTAGES AT HIGH FREQUENCIES EMITS RADIO
FREQUENCY INTERFERENCE ( RFI ) AND ELECTROMAGNETIC INTERFERENCE ( EMI ). THE
MOTOR LEADS MUST BE RUN IN METALLIC CONDUIT TO PREVENT INTERFERENCE WITH
OTHER EQUIPMENT. THIS CONDUIT MUST BE ALL IN ONE PIECE, IF POSSIBLE, AND THIS
CONDUIT MUST BE SOLIDLY GROUNDED. ONLY THE MOTOR LEADS AND THE GROUND WIRE
FROM THE CONTROL TO THE MOTOR SHOULD BE IN THIS CONDUIT.
* NOTE:
THE POWER SUPPLY FOR THE FWD/REV SWITCH, WHEN USED, MUST COME FROM TB2
TERMINAL 17 ONLY. DO NOT CONNECT THE FWD/ REV SWITCH ANYWHERE IN THE CONTROL
PUSHBUTTONS CIRCUIT BETWEEN TB2 TERMINAL 4 AND TB2 TERMINAL 8.
6/1/2001 © copyright 1997 by Powertec
Page 29

Model
Installation and Operation Manual
1000
Page
INSTALLATION CHECKLIST
Is the Model 1000 securely mounted in a vertical position (fuses up) [page 9]?
Is the motor mechanically safe to run (an unloaded motor is recommended) ?
Is the machine safe to run and are all personnel clear ?
Is there a clear path for airflow through the base heatsink and through the chassis
Is the temperature of the air surrounding the drive within specifications
Is the AC power source for the drive of the proper voltage, frequency, and capacity
Is the motor securely mounted and aligned
Is the drive and motor system properly grounded
Are the motor leads connected in the proper order
Is the cable from the motor to the drive properly connected
If an Output Contactor is used, is it properly interlocked
If Dynamic Braking is used, are the resistors properly installed and wired
Is the motor thermal properly wired to the drive
Is the Emergency Stop button properly installed
Are other drive controls properly wired
Is the Speed Reference source properly wired in
Proceed to the Start Up section.
[motor manual]
[pages 11 and 13]
[page 13]
[pages 16 and 17]
[pages 16 and 17]
[pages 16 and 17]
[page 21 or 23]
?
?
[page 13]
[page15]
?
[page 9]
?
?
?
?
?
?
?
[page15]
[page 9]
[page 11]
?
27
?
?
OFFICIAL 6/1/2001
Page 30

Page
28
Model
Installation and Operation Manual
1000
BUS CONNECTIONS ARE ON
THE CAPACITOR BOARD ON
THE RIGHT SIDEWALL.
BEHIND FRONT PANELS.
CURRENT
CONTROLLER
BOARD
SPEED
CONTROLLER
BOARD
Capacitor Board Layout and Connections
6/1/2001 © copyright 1997 by Powertec
Page 31

Model
Installation and Operation Manual
1000
Page
WHAT HAPPENS WHEN I …
APPLY POWER TO THE MODEL 1000 ?
When the power to the Model 1000 or 1000A is turned on, the graph below demonstrates what
happens to the drive’s bus voltage.
640
VDC
563
VDC
540
VDC
VOLTAGE
POWER ON
CONTACTOR
PULLS IN
OUTPUT
OF DIODE
BRIDGE
BUS
VOLTAGE
BUS
VOLTAGE IF
CONTACTOR
DOES NOT
PULL IN
UNDERVOLTAGE
29
START UP
0
VDC
PWR
LED
ON
BUS
LED
RED
TIME
BUS
LED
GREEN
The bus voltage can be observed with a voltmeter connected to the POSITIVE BUS and NEGATIVE
BUS terminals on the Capacitor Board. This board is located on the right sidewall of the drive behind the
front panels (see page 28). The Bus terminals are near the top of the drive. BE CAREFUL. THESE
TERMINALS MAY HAVE POTENTIALS UP TO 800VDC!!
There are LED indicators on the Current Controller board (see the layout on page 30). The action of
some of these LED’s is indicated in the graph above and on subsequent pages.
The POWER LED (it is GREEN in color) comes on as soon as the main power is turned on. This
LED operates from the +24VDC raw power supply. If this LED does not come on, you should check the
incoming power, main fuses and power transformer fuse.
While the bus is charging, the BUS LED lights up RED in color. When the bus reaches a level of
approximately 35VDC below the nominal bus level, a contactor energizes to bypass the charging resistor.
The BUS light then changes to GREEN in color. If the light does not change to GREEN within 30 seconds,
turn off the input power and attach a meter to the bus terminals to monitor the bus voltage. See the
troubleshooting section for assistance.
On the Current Controller board, there are three LED’s labeled HS1, HS2, and HS3. These are the
encoder position indicators. One
or two of these indicators should be on. If none are on or if all three are
on, there is a problem. Refer to the troubleshooting section.
The ENABLE LED should be off.
The TAC LED may be off or RED or GREEN. It is not important at this time.
Once the bus has charged up and the BUS LED is GREEN, you may proceed to the next section.
OFFICIAL 6/1/2001
Page 32

Page
30
CURRENT CONTROLLER
BOARD
Model
Installation and Operation Manual
1000
SPEED CONTROLLER
BOARD
POWERTEC
JP2
JP1
GAIN
STAB
CLIM
ACCEL
POWER
GREEN
HS3
RED
HS2
RED
HS1
RED
JP3
STALL
RED
BUS
RED/GREEN
ENABLE
YELLOW
P4
REMOVE
FOR
COAST
STOP
DECEL
JOG SPD
MAX SPD
MIN SPD
JP1
CURRENT
LIMIT
LED
TAC
RED/GREEN
TB1
PL
RED
OV/UV
RED
IOC
RED
RUN
LED
TB2
RUN
123456789101112131415161718
ZERO
SPEED
LED
JUMPERS
CURRENT CONTROLLER BOARD 141-108
- “AF-N” Jumper - Used to decide whether or not the drive is permanently in the “DIGITAL”
JP1
mode. This selection overrides the input at TB1 terminal 10. If JP1 is in the “AF” position,
the drive is in the DIGITAL mode and TB1 terminal 10 has no effect. If JP1 is in the “N”
position, you must apply +24VDC to TB1-terminal 10 to switch to DIGITAL mode.
- “RESET” Jumper - Used to trap faults when troubleshooting. Faults are normally reset by
JP3
pressing the STOP button when the RESET jumper is in the INTERNAL (INT) position.
When the RESET jumper is moved to the MAN (Manual) position, the faults do not reset
by pushing the STOP button. The fault must be reset by moving the RESET jumper to the
middle (RESET) position and then the jumper must be moved to either INT or MAN. The
drive will not run with the jumper in the middle position.
SPEED CONTROLLER BOARD 141-107
- “COAST TO STOP” Jumper - Determines whether the drive has a RAMP STOP mode, i.e.
JP1
if the drive attempts to decelerate the motor to a stop or if the motor is allowed to coast to
a stop. When the jumper is installed, the drive changes from RUN or JOG mode to RAMP
STOP mode when the RUN or JOG mode is ended. If the jumper is removed, the drive
has no RAMP STOP mode and the drive is disabled when the RUN or JOG mode ends.
- “RAMP RATE” Jumper - Sets the range of the ACCEL and DECEL pots. If the jumper is
JP2
installed, rates are adjustable from about 2 to about 90 seconds. If the jumper is
removed, the rates are adjustable from about 50 milliseconds to about 2 seconds. Times
given are the time to change speed from zero speed to maximum speed (ACCEL), or
from maximum speed to zero speed (DECEL). Other speed change times are
proportional.
6/1/2001 © copyright 1997 by Powertec
Page 33

Model
Installation and Operation Manual
1000
Page
WHAT HAPPENS WHEN I …
GIVE THE START COMMAND TO THE MODEL 1000 ?
Before starting the Model 1000 drive, turn the Current Limit pot fully counter-clockwise, and the
speed reference command input, analog or digital, should be set to zero.
You must have +24VDC (all voltages are relative to TB1 terminal 16)
applied to TB2 terminal 7 (Emergency Stop input) before attempting to
RUN or JOG. You must maintain +24V on TB2 - 7 as long as you want to
run or jog.. Removing +24V from the Emergency Stop input will stop the
drive regardless of whatever other inputs may be energized.
You must apply +24V to TB2 terminal 4 to start the
Model 1000 drive. When you energize TB2-4, even if the
START
Emergency Stop circuit is NOT energized, the RUN LED
on the Speed Controller board will light up and the normally
open RUN contact between TB2 terminals 1 and 2 will
close. If the Emergency Stop is closed, the drive will be in
the RUN mode as long as the +24V is maintained on TB2 -
RUN
MODE
4.
If you use a momentary contact to energize the RUN
input at TB2-4, then you must have +24V applied to TB2
terminal 5 to continue running, as illustrated in the drawing
at left. If you do not have +24V applied to TB2 - 5, then the
RUN
RAMP
STOP
RUN LED will go off and the RUN contact will open as
soon as you let go of the START button.
If you press the STOP button in the drawing at left, or
otherwise remove +24V from TB2-5, the drive will go to the
ramp stop mode, i.e., the motor will coast or decelerate to
EMERGENCY
STOP
a stop and the drive shuts off.
To shut off immediately, open the Emergency Stop
button or otherwise remove +24V from TB2-7.
. The RUN contact will NOT close at TB2 terminals 1 and 2.
+24VDC
+24VDC
E.STOP
CLOSED
E.STOP
OPEN
E.STOP
+24V
E.STOP
+24V
E.STOP
+24V
E.STOP
+24V
OPEN
+
o
STOP
CLOSED
STOP
CLOSED
STOP
OPEN
STOP
TB2
7
TB2
7
OR
RUN
AND
RUN JOG
START
TB2
+
4
CLOSEDCLOSED
+
5
+
7
START
TB2
0
4
OPENCLOSED
+
5
+
7
START
TB2
0
4
OPENCLOSED
0
5
+
7
START
TB2
0
4
OPENCLOSED
0
5
0
7
JOG
RUN
ENABLE
RUN
ENABLE
ENABLE
RUN
ENABLE
You may start the drive with the JOG input by applying +24 VDC to TB2 terminal 13. The JOG LED
will light. The RUN LED will NOT light up
The JOG mode should be initiated from the STOPPED condition. If the JOG input is energized while
in RUN mode, the JOG overrides the RUN mode. When the JOG input is released, the drive returns to
RUN mode (if it is still on) and accelerates to the speed commanded by the input speed reference.
In either JOG or RUN mode, an ENABLE REQUEST is generated, and the ENABLE LED should light
on the Current Controller board. There are several reasons why the LED may not light:
1. The ENABLE LED will not light if the BUS LED is not GREEN;
2. The ENABLE LED will not light if the EMERGENCY STOP input is not energized;
3. The ENABLE LED will not light if any trip LED on the Current Controller board is lighted:
• The OV/UV LED, indicating an over-voltage or under-voltage bus condition;
• The PL LED, indicating a power supply deficiency;
• The IOC LED, indicating excessive current going to the output transistors.
4. The ENABLE LED will not light if any of the ribbon cables is loose;
5. The ENABLE LED will not light if the RESET JUMPER is in the middle position.
Once the ENABLE LED is lit, turning the motor only requires the insertion of a speed reference.
31
OFFICIAL 6/1/2001
Page 34

Page
32
Model
Installation and Operation Manual
1000
LED INDICATORS
CURRENT CONTROLLER BOARD 141-108
PWR Power Turns ON GREEN as soon as power is applied to the drive.
Turns OFF when power is removed from the drive.
BUS Bus Status Turns ON RED as soon as power is applied to the drive
Changes to GREEN when voltage across charging resistor drops below 35VDC.
Changes back to RED if there is an OV/UV fault AND the drive is not enabled.
Changes back to GREEN when OV/UV fault is cleared.
Turns off when power is revoved from the drive.
HS1 Hall Sensor 1 Turns on RED when SOUTH magnetic pole is over HS1 in encoder.
Turns off when NORTH magnetic pole is over HS1 in encoder.
HS2 Hall Sensor 2 Turns on RED when SOUTH magnetic pole is over HS2 in encoder.
Turns off when NORTH magnetic pole is over HS2 in encoder.
HS3 Hall Sensor 3 Turns on RED when SOUTH magnetic pole is over HS3 in encoder.
Turns off when NORTH magnetic pole is over HS3 in encoder.
TAC Hall Sensor 4 Turns on GREEN when SOUTH magnetic pole is over HS4 in encoder.
Hall Sensor 5 Turns off RED when SOUTH magnetic pole is over HS5 in encoder.
Turns on BOTH when SOUTH magnetic pole is over both HS4 and HS5.
Turns off when NORTH magnetic poles are over both HS4 and HS5.
ENBL Enable Turns ON YELLOW when:
1.
Drive is in RUN mode with no faults.
2.
Drive is in JOG mode with no faults.
3.
Turns off when:
STALL Stall Fault Turns ON RED if motor does not move 30° within specified time.
Time is inversely proportional to motor current.
Times out in 1.6 seconds at Current Limit (150% of full load).
Will not time out if current is less than 40% of full load.
Turns off when trips are reset.
PL Power Loss Turns ON RED if the +24 VDC raw supply drops below 18VDC.
Turns ON RED if the +15VDC supply rises to within 3VDC of +24VDC.
Turns off when trips are reset if the condition no longer exists.
OV/UV Overvoltage Turns ON RED in the following cases:
UnderVoltage 1. Bus Voltage is greater than 120% of nominal at any time.
Turns off when trips are reset if the condition no longer exists.
IOC Instantaneous Turns ON RED if bus current to output transistors exceeds 300%.
OverCurrent Turns off when trips are reset.
PHAD Phase Advance Indicates electronic shifting of encoder signals to achieve Constant Horsepower.
GREEN indicates no phase advance.
ORANGE indicates 18° of phase advance timing.
RED indicates 30° of phase advance timing.
SPEED CONTROLLER BOARD 141-107
RUN RUN mode Turns ON GREEN when +24VDC is applied to TB2 terminal 4.
Stays ON GREEN as long as +24VDC is applied to TB2-4 or TB2-5.
Turns off when + 24VDC is removed from BOTH TB2-4 and TB2-5.
CURRENT LIMIT Current Limit Turns on RED when speed demand cannot be satisfied.
One cause is current limit, which is adjustable from 0% to 150% of full load motor current.
Another cause is when the speed required is too great at that load and bus voltage.
Turns off when above conditions cease to exist.
ZERO SPEED Zero Speed Turns ON YELLOW when motor speed exceeds approximately 10 RPM with 120 PPR encoder.
Turns OFF when RUN, JOG or RAMP STOP mode ends.
During RAMP STOP with no faults.
1.
The UnderVoltage Timer times out.
2.
There is an Undervoltage (UV) fault.
3.
There is an OverVoltage (OV) fault.
4.
There is an IOC fault.
5.
There is a STALL fault.
6.
RUN, JOG, and RAMP STOP modes are all off.
2.
Bus Voltage is less than 75% of nominal at any time.
3.
Bus Voltage is below 85% of nominal for 80 mS or more.
4.
The charging contactor is not energized.
6/1/2001 © copyright 1997 by Powertec
Page 35

Model
Installation and Operation Manual
1000
Page
WHAT HAPPENS WHEN I …
GIVE THE SPEED COMMAND TO THE MODEL 1000 ?
Once the drive is in RUN mode, the application of the speed reference should cause the motor to
turn. At this point:
the PWR and BUS LED’s on the Current Controller board (CCB) should be GREEN;
•
one or two of the HS1, HS2, and HS3 LED’s should be on,
•
the ENABLE LED should be ON,
•
the RUN LED on the Speed Controller should be on,
•
the TAC LED on the CCB may be OFF, RED or GREEN, depending on the position of the motor.
•
the ILIMIT LED may be on if the Current Limit pot is fully counter-clockwise.
•
If the above conditions do not exist, see the Troubleshooting section.
There are several ways to apply a reference:
1. For an analog speed reference, a speed pot or an external voltage, see page 21;
2. For a digital speed reference, see page 23 (Read the notes on page 22).
When the speed reference is increased from zero, the motor should turn. If the current limit LED
turns on, check for the following:
1. If the motor is not turning, turn the Current Limit pot clockwise to see if the motor will turn and
the Current Limit LED turns off. If the pot is already more clockwise than its mid-point, turn it
all the way counter-clockwise to protect the motor and drive.
2. If the Current Limit pot is fully counterclockwise, and the motor is not turning, turn the pot
slowly clockwise to see if the motor will turn. If the motor turns, leave the Current Limit pot
where it is when the motor begins to turn.
3. If the motor does not turn when the Current Limit pot is increased, do not turn the Current
Limit pot higher than 50% of its rotation. Shut the drive off and check the connections
between the drive and the motor. It is quite common that these connections are mixed up.
When the speed reference is increased, if the motor does not turn, but the Current Limit LED does
NOT turn ON, check the following:
1. Make sure the RUN and ENABLE LED’s are on;
2. Make sure a reference is being properly applied:
• For an analog reference, a voltage between 0 VDC and +10V must be present at
TB2-10 with respect to TB2-12(common). The AF/N jumper (JP1) on the Current
Controller board must be in the “N” position and there must be 0 VDC between
terminals 9 and 10 on TB1.
• For a digital reference, there must be a suitable pulse train between terminals 11 and
9 on TB1 (see page 22). There must be +24V between terminals TB1-10 (+) and
TB1-9(-) OR the “AF/N” jumper (JP1) on the Current Controller board must be in the
“AF” position.
When the motor begins to turn, the HS1, HS2, and HS3 LED’s on the Current Controller board will
begin to flash on and off. These indicate rotation of the motor by turning on when the encoder magnets
pass over the sensors. When the motor is turning rapidly, it will appear as though all three of the HS1,
HS2, and HS3 LED’s are on at the same time.
When the motor begins to turn, the TAC LED will begin to flash alternately RED and GREEN, then
appear to be ORANGE as the motor turns faster.
When the motor begins to turn, the ZERO SPEED LED should turn on and remain lighted until the
motor next comes to a stop.
Check the speed of the motor at the 10%, 25%, 50% and 100% points of the speed reference.
33
OFFICIAL 6/1/2001
Page 36

Page
34
Model
Installation and Operation Manual
1000
ADJUSTMENTS
CCW = Counter-ClockWise position CW = ClockWise position
MIN Minimum Speed ANALOG MODE only.
No effect unless speed pot is connected to TB2-11.
Effect equals 100 * 1000/(Speed Pot Value + 1000) percent of full speed
CCW is 0% effect, or zero speed.
CW is full effect. With a 5000 ohm speed pot, this is 16% of full speed.
MAX Maximum Speed ANALOG MODE only.
Not an absolute speed limit. Calibration to reference.
At CCW, with 10VDC input, generates a VCO frequency of 1200 Hertz.
At CW, with 10VDC input, generates VCO frequency of 10 Kilohertz.
JOG Jog Speed ANALOG MODE only.
Sets speed during JOG mode.
CCW is zero Jog Speed.
CW is a jog speed of about 30% of full speed.
ACCEL Acceleration time ANALOG MODE only.
Sets amount of time to change from zero speed to full speed.
With JP2 installed, CCW is about 90 seconds.
With JP2 not installed, CCW is about 2 seconds.
With JP2 installed, CW is about 2 seconds.
With JP2 not installed, CW is about 0.05 seconds.
DECEL Acceleration time ANALOG MODE only.
Sets amount of time to change from full speed to zero speed.
With JP2 installed, CCW is about 90 seconds.
With JP2 not installed, CCW is about 2 seconds.
With JP2 installed, CW is about 2 seconds.
With JP2 not installed, CW is about 0.05 seconds.
GAIN Gain adjust ANALOG and DIGITAL modes.
Sets the stiffness of the motor shaft.
Zero position is where the shaft should be at any point in time.
Motor amps is proportional to offset of the shaft from the zero position.
Stiffness is motor amps per degree of shaft offset from zero position.
CCW is about 0.56% of full load current per degree of offset.
CW is about 5.6% of full load current per degree of offset.
Normal Gain setting is between CCW and 50% of rotation.
STAB Stability adjust ANALOG and DIGITAL modes.
Sets the stability of the motor under load.
CCW makes the drive more sluggish.
CW makes the drive more sensitive.
Normal setting is at about mid-range (50%) of pot rotation.
CLIM Current Limit ANALOG and DIGITAL modes.
Sets the maximum average current to the motor in percent of full load.
This adjustment depends on the HP calibration resistor on TB3-1 and TB3-3.
CCW is zero percent, or zero current.
CW is maximum current limit, or about 150% of full load.
Initial startup should be made with CLIM fully CCW.
Increase CLIM to full CW gradually as confidence in setup is gained.
In normal operation, CLIM is set to 150% (CW).
6/1/2001 © copyright 1997 by Powertec
Page 37

Model
Installation and Operation Manual
1000
Page
WHAT HAPPENS WHEN I …
MAKE AN ADJUSTMENT ON THE MODEL 1000 ?
Once the motor is running, it may be necessary to make adjustments to produce the desired results.
ACCEL time DECEL time
MAX speed
35
MIN speed
ZERO speed
START
Speed
Pot at
CCW
Speed
Pot to CW
STOP
RAMP
STOP
JOGONJOG
OFF
JOG speed
With a standard speed pot connection (see page 21), the MIN pot on the Speed Controller board is
actually a minimum reference level. When the drive is started in the RUN mode with the speed pot fully
counter-clockwise (CCW, or 0%), the speed reference will be whatever is dialed in on the MIN speed pot.
If the low end of the speed pot is connected to TB2 terminal 12, or if an external reference is used,
the MIN pot has no effect.
If the speed pot is turned to 100% clockwise (CW), or the speed reference is otherwise increased to
+10VDC at TB2 terminal 10, the motor will accelerate to the maximum speed. You may use the MAX pot
on the Speed Controller to adjust the maximum speed of the motor.
Actually, the MAX pot will affect the speed at any speed reference input. The MAX pot adjustment is
not an absolute limit. It is a calibration to the reference.
The amount of time it takes the motor to change from zero speed to maximum speed is adjustable
with the ACCEL pot on the Speed Controller board. The range of time depends on whether or not JP2 is
installed. With JP2 installed, the time for acceleration is adjustable from about 2 seconds (ACCEL pot fully
clockwise) to about 90 seconds (ACCEL POT fully CCW). With JP2 removed, the time is adjustable from
about 0.05 seconds to about 2 seconds.
The ACCEL time is the time it takes the ramp circuit to change the speed reference from zero to full
speed. The motor may not accelerate in the same amount of time if it is limited by inertia or load, in which
case the motor will accelerate in current limit.
When the STOP button is pressed at full speed, if the COAST TO STOP jumper is removed, the
drive will shut off and the motor will coast to a stop. The time it takes the motor to stop is called the “coast
time”. This time is not controlled unless Dynamic Braking is installed.
If the STOP button is pressed and the COAST TO STOP jumper is installed, RAMP STOP mode is
initiated. The speed reference input is clamped to zero after the input at TB2 terminal 10 and the drive
ramps the speed to zero. The drive then shuts off.
The amount of time allowed for the deceleration is adjustable with the DECEL pot on the Speed
Controller board. This time has the same ranges as the ACCEL pot.
The Models 1000 and 1000A are non-regenerative drives, i.e., they have no braking effect. When the
RAMP STOP mode is in operation, or if the speed pot is turned to 0% while running at full speed, the
DECEL time will only be effective if the coast time of the motor (see above) is shorter than the DECEL
time. Otherwise, the motor will coast to a stop. When the motor gets to zero speed, the drive shuts off.
JOG speed is adjustable with the JOG pot on the Speed Controller board. JOG speed is affected by
the MAX speed adjustment, but JOG speed is not affected by the MAX pot, the ACCEL pot, or the DECEL
pot. JOG accelerates in current limit.
OFFICIAL 6/1/2001
Page 38

Page
36
Model
Installation and Operation Manual
1000
L1, L2, AND L3 MAY BE SWITCHED AROUND
AMONG THEMSELVES WITHOUT ILL EFFECT
6/1/2001 © copyright 1997 by Powertec
Page 39

Model
Installation and Operation Manual
1000
Page
TROUBLESHOOTING
TROUBLESHOOTING
TROUBLESHOOTINGTROUBLESHOOTING
37
T
ROUBLESHOOTING THE MODEL
1000 D
RIVE
Troubleshooting of the Model 1000 drive should only be attempted by personnel
experienced in working on high-voltage, high power equipment.
Equipment Necessary for Troubleshooting :
Safety Glasses
1.
A Volt-Ohm-Milliammeter, preferably digital, with:
2.
A DC Voltage scale of 1000VDC minimum
•
An AC True-RMS Voltage scale of 1000VAC minimum
•
A fuse-protected ohmmeter with as low a scale as possible
•
A frequency reading capability, if possible
•
A plug-in attachment to read AC and DC current, if possible
•
Meter leads insulated for 1500 VDC
•
A True RMS clamp on ammeter for AC current, or DC current, or both
3.
An oscilloscope is handy if the person using it knows how to use it well.
4.
.
Other equipment may be required for some configurations.
A Megger is useful for checking motor integrity and wiring insulation.
.
Spare Parts are Necessary to do On-Site Repairs Quickly and Efficiently.
Some or all of the following parts may be required for fast on-site repair.
Listed in approximate order of importance.
Item Part Part Spares
Description Designation Number Quantity
Input Fuses FU1, FU2, and FU3 * HP * 10
Transformer Fuse FU4 FLQ-8/10 5
Capacitor Board 141-206 1
Output Transistor Module * HP * 1
Driver Board 141-105 1
Current Controller Board 141-108 1
Input Diode Module RECT1 * HP * 1
Power Transformer T1 141-004 1
Speed Controller Board 141-107 1
Input Choke L1 141-005 1
* HP * means horsepower and/or voltage dependent.
Consult your Distributor for spare parts pricing and delivery.
A Word About The Troubleshooting Charts
Troubleshooting charts cannot solve every problem
Troubleshooting charts are a useful tool in tracing simple problems down to the board or major component level.
Follow the troubleshooting chart as far as you can until the problem is resolved or you reach a dead end.
If you find yourself coming back to the same point in the troubleshooting chart several times, call the factory and
obtain the help of a trained technician. Let him know what point you keep coming to in the chart. This will help us to
improve the troubleshooting chart in the future.
!
OFFICIAL 6/1/2001
Page 40

Page
38
Model
Installation and Operation Manual
1000
TRANSISTOR MODULE STATIC TEST
Equipment needed: A Digital Multi-Meter (
in the positive (+) input and a BLACK lead in the negative (-) input.
Preparation: Different meters give different readings on diode tests. KNOW YOUR METER !! Some
meters read backwards due to battery polarity. Test YOUR meter on a known good diode
bridge before performing tests so that you know how your meter will act.
Refer to page 36 for the drive power schematic and semi-conductor diagrams.
Precautions: If the transistor module is to be tested in circuit, make sure power has been off long
enough for the capacitor banks to completely discharge.
Procedure: The procedure is the same for in circuit or out of circuit testing. If a component tests bad
in
circuit, it must be tested again after it is removed because of the possibility of alternate
paths when the component is in circuit.
SIX TRANSISTOR MODULE
RED LEAD BLACK LEAD GOOD BAD
P N open short
N P 0.3 to 2.0 short or open
N U 0.3 to 0.7 short or open
N V 0.3 to 0.7 short or open
N W 0.3 to 0.7 short or open
U P 0.3 to 0.7 short or open
V P 0.3 to 0.7 short or open
W P 0.3 to 0.7 short or open
P B1 open short
P B2 open short
P B3 open short
U B4 open short
V B5 open short
W B6 open short
B1 U 0.3 to 500 short or open
B2 V 0.3 to 500 short or open
B3 W 0.3 to 500 short or open
B4 N 0.3 to 500 short or open
B5 N 0.3 to 500 short or open
B6 N 0.3 to 500 short or open
TWO TRANSISTOR MODULE
RED LEAD BLACK LEAD GOOD BAD
C1 E2 open short
E2 C1 0.3 to 2.0 short or open
E2 E1C2 0.3 to 0.7 short or open
E1C2 C1 0.3 to 0.7 short or open
C1 B1 open short
E1C2 B2 open short
B1 E1C2 0.3 to 500 short or open
B2 C2 0.3 to 500 short or open
)with a diode scale is preferred. You should have a RED lead
DMM
6/1/2001 © copyright 1997 by Powertec
Page 41

Model
Installation and Operation Manual
1000
Page
POWERTEC Model 1000 Drive Start Up and Troubleshooting Chart
START
Turn Power Off.
Remove fuses.
Check for shorts.
Install new fuses.
Re-apply power.
Yes
1st
time
fuses have
blown
?
Page 1
Check for grounds,
then turn on power
Is
PWR
LED ON
?
No
Are
No Yes
FU1, FU2,
and FU3
OK?
NOTE: This chart assumes standard control connections
and no options installed which affect speed control.
This step assumes that you know for a
fact that the proper power is applied.
CC = Current Controller board.
SC = Speed Controller board.
Yes
No
Is
Fuse FU4
OK
?
No
Is
P2 on CC
unplugged
?
Yes
39
Page 2
Turn Power Off
Remove Fuse.
Unplug P2 on CC.
Replace Fuse
Start Over.
Do the following in
order, checking FU4
after each change.
No
Turn Power Off
Disconnect motor.
Remove, separate, and tape up
wires on + (or P) terminal of
transistor bridge.Replace fuses.
Re-apply Power.
Are
FU1, FU2,
and FU3
OK?
Yes
Turn Power Off
Re-connect + of diode bridge to
Capacitor Board tab. Leave + of
transistor module disconnected.
Re-apply Power.
Are
FU1, FU2,
and FU3
OK?
Yes
Turn Power Off
Re-connect + (or P)
terminal of transistor
bridge.
Re-apply Power.
No
No
Before disconnecting
any wires, make sure
you know where to re-
connect them.
Replace
Diode Bridge
Replace
Capacitor Board
Yes
Turn Power Off
On CC: Plug in P2.
Unplug P3 and P4.
Unplug TB1 and TB2.
Re-apply Power.
Is
PWR
LED ON
?
Yes
Turn Power Off
Plug in P4 on CC.
Re-apply Power.
Turn Power Off
Plug in TB2 on SC.
Re-apply Power.
Turn Power Off
Plug in TB1 on CC.
Re-apply Power.
After turning off power, make
sure that capacitors are
discharged before touching
live parts.
No
Tolerance:
+ / - 4 VDC
Is
+24VDC
TB2-17(+) to
TB1-16(-)
?
Yes
Is
+24VDC
TB2-17(+) to
TB1-16(-)
?
Yes
Is
+24VDC
TB2-17(+) to
TB1-16(-)
?
No
No
Yes
1st Replace
PowerTransformer
2nd Replace
Driver Board
3rd Replace
P2 Ribbon Cable
Replace Current
Controller board.
Replace Speed
Controller board.
Replace P4 Cable
Check external
controls on TB2.
Replace
Capacitor Board
Replace Transistor
Block
No
OFFICIAL 6/1/2001
Are
FU1, FU2,
and FU3
OK?
Yes
Have motor
checked.
No
Check external
controls on TB1.
Page 42

Page
40
Model
D
IODE BRIDGE TEST
Equipment needed: A Digital Multi-Meter (
Preparation: Different meters give different readings on diode tests. KNOW YOUR METER !! Some
Precautions: If the diode bridge is to be tested in circuit, make sure power has been off long enough for
Procedure: The procedure is the same for in circuit or out of circuit testing. If a component tests bad
in the positive (+) input and a BLACK lead in the negative (-) input.
meters read backwards due to battery polarity. Test YOUR meter on a known good diode
bridge before performing tests so that you know how your meter will act.
the capacitor banks to completely discharge.
in circuit, it must be tested again after it is removed because of the possibility of alternate
paths when the component is in circuit.
Set the DMM on the diode scale.
1.
Place the RED (positive) lead on the “-“ or “N” terminal of the diode bridge. Place the
2.
BLACK (negative) lead on each of the AC terminals in turn. In each case you should
read about 0.300 to 0.700 on a digital meter. If you see a short or an open circuit,
disconnect the wires from the diode bridge terminals and re-test.
Repeat the above step with the BLACK lead on the “+” or “P” terminal of the diode
3.
bridge, placing the RED lead on each of the AC terminals.
Place the RED lead on the “+” or “P” terminal and the BLACK lead on the “-“ or “N”
4.
terminal. It should read an open circuit.
Installation and Operation Manual
1000
)with a diode scale is preferred. You should have a RED lead
DMM
T
RANSISTOR LEAKAGE TEST
Equipment needed: A Digital Multi-Meter (
input and a BLACK lead in the negative (-) input.
Preparation: Set the meter on the 1000VDC scale. Be sure the leads are insulated for this voltage.
Refer to page 36 for the drive power schematic and semi-conductor diagrams.
Precautions:
Procedure: Turn the drive power off and disconnect motor leads T1, T2, and T3.
Turn the power on and wait for the bus to charge (a green BUS LED). If the bus will not
Measure the BUS voltage (POSITIVE BUS to NEGATIVE BUS) before beginning.
Place the Red lead of the meter on the POSITIVE BUS. Place the BLACK lead, in turn, on
This test is an in-circuit test with power on
have been trained to work around high voltage.
charge, turn power off and go to TRANSISTOR MODULE STATIC TEST.
T1, then T2, then T3. In each case, notice the voltage reading.
1. Repeat the above test with the BLACK lead on the NEGATIVE BUS and touching the
RED lead, in turn, to T1, T2, and T3. Check the transistor block connected to any T
lead reading 0 VDC or BUS voltage.
) is preferred. You should have a RED lead in the positive (+)
DMM
. It should be performed by personnel who
If any voltage reading is 0 VDC, there may be a bad transistor. Turn off
•
power, disconnect the transistor module connected to the T lead with the
bad reading, and perform the TRANSISTOR MODULE STATIC TEST.
If any voltage reading is the same as the BUS VOLTAGE, it may indicate a
•
problem in the opposing transistor in that T lead leg or an unexpected
alternate path in the circuit.
If any voltage reading is 0 VDC, there may be a bad transistor. Turn off
•
power, disconnect the transistor module connected to the T lead with the
bad reading, and perform the TRANSISTOR MODULE STATIC TEST.
If any voltage reading is the same as the BUS VOLTAGE, it may indicate a
•
problem in the opposing transistor in that T lead leg or an unexpected
alternate path in the circuit.
6/1/2001 © copyright 1997 by Powertec
Page 43

Model
Installation and Operation Manual
1000
Page
POWERTEC Model 1000 Drive Start Up and Troubleshooting Chart
Wait up to 30 seconds for
BUS LED to change from
RED to GREEN
From
Page 1
Page 2
Is
BUS LED
GREEN
?
No
NOTE: This chart assumes standard control connections
and no options installed which affect speed control.
CC = Current Controller board.
Yes
41
To
Page 3
Replace Current
Controller board
Disconnect Motor
Measure the Bus
Voltage between
POSITIVE BUS Tab
and the NEGATIVE
BUS Tab on the
Capacitor Board.
Is
Bus
VDC
< 10%
?
No
Is
Bus
VDC
> 90%
?
No
No
Yes
Line VAC = 230
Bus VDC = 320
Line VAC = 380
Bus VDC = 530
Line VAC = 460
Bus VDC = 640
No
Is
BUS LED
RED
?
Yes
Is
Line
Voltage
Too Low
?
Bus
Loader
Connected
?
Yes
Perform
Transistor Module
Leakage Test
Yes
No
Bus Loader and
Nominal Line Voltage = 230VAC
Too Low < 208 VAC
Nominal Line Voltage = 380VAC
Too Low < 342VAC
Nominal Line Voltage = 460VAC
Too Low < 415VAC
Fix Line Voltage
Problem
Turn Power Off
Remove FU1 on
Capacitor Board
Disconnect
Start Over.
Is
Charge
Fuse OK
?
Yes
Turn Power Off
Perform Diode
Bridge Test
No
Replace
Charge Fuse
Yes
Replace
Capacitor Board
OFFICIAL 6/1/2001
Is
Transistor
Module
OK?
Yes
No
Replace
Transistor
Module
Replace
Capacitor Board
Replace
Capacitor Board
Is
Diode
Bridge OK
?
Yes
Turn Power Off
Check Choke L1
for continuity
Is
Yes No
Choke
OK
?
No
Replace Diode
Bridge
Replace
Choke
Page 44

Page
42
Model
Installation and Operation Manual
1000
MOTOR ENCODER CONNECTIONS
IN MOTOR TERMINAL BOX
MOTOR ENCODER LAYOUT
6/1/2001 © copyright 1997 by Powertec
Page 45

Model
Installation and Operation Manual
1000
Page
POWERTEC Model 1000 Drive Start Up and Troubleshooting Chart
Page 3
Yes
NOTE: This chart assumes standard control connections
and no options installed which affect speed control.
CC = Current Controller board.
43
From
Page 2
You can see the
rotation of these
three LED's by
turning the motor by
hand. There should
always be one or
two on at a time -
never all three on
and never all three
off.
Connect Encoder
Cable
Replace Encoder
No
Is
HS1 LED
ON
?
No
Is
HS2 LED
ON
?
No
Is
HS3 LED
ON
?
No
Is
Cable
Connected to
motor
?
Yes
+5VDC
TB1-8(+)
TB1-7(-)
?
Yes
Yes
Yes
No
No
No
Turn off Power
Disconnect Encoder
Cable at Motor End
Re-apply power.
HS2 LED
HS3 LED
Turn off Power
Disconnect wires
on TB1-2, TB1-
3, and TB1-4.
Reapply power.
Any of the
HSX LED's
Replace Current
Controller Board
Is
ON
?
Yes
Is
ON
?
Yes
Are
ON
?
Is
TAC LED
ON
?
No
Turn Motor by hand to
see the TAC LED
sequence, which is:
RED, ORANGE,
GREEN, OFF or the
reverse order.
HSX LED's
means HS1,
HS2, and
HS3
Turn off Power
Re-connect
wires on TB1-2,
TB1-3, and TB1-
No
4. Disconnect
Cable at motor
end. Reapply
power.
Are
Any of the
HSX LED's
ON
Yes
Yes
Is
TAC LED
operation
OK
?
No
Turn off Power
Disconnect wires
on TB1-5 and
TB1-6. Reapply
power.
Is
TAC LED
ON
?
No
No
?
Replace
Encoder
To
Page 4
Yes
Yes
Is
Wiring
OK
?
No
Fix Wiring
Turn off Power
Check Encoder Wiring
to Motor
OFFICIAL 6/1/2001
Yes
+5VDC
TB1-8(+)
TB1-7(-)
?
Replace Current
Controller board
Yes
No
Turn off Power
Disconnect TB1
+5VDC
TB1-8(+)
TB1-7(-)
?
Yes
NoYes
Replace
Cable
Replace Current
Controll board
Check TB1 Connections
Check for short in cable.
Page 46

Page
44
Model
Installation and Operation Manual
1000
IOC T
An Instantaneous Over Current (IOC) fault is a serious matter. An IOC fault is indicated when the drive has
detected a potentially damaging amount of current going into the output transistor stage. Whenever possible, avoid
trying to restart the drive after an IOC fault until the following tests have been performed:
:
ESTS
Turn off power and wait for the main power capacitors to discharge.
1.
Turn the ILIMIT potentiometer fully Counter-ClockWise (CCW).
2.
Disconnect the motor power leads and check the motor for grounds.
3.
With power still off, perform the Transistor Module Static Test (page 38).
4.
Re-apply power and perform the Transistor Leakage Test (page 40).
5.
If any of the Driver board LED’s are on now, change the driver board.
6.
Press the START button and rotate the motor slowly by hand. Watch the driver board LED’s to see
7.
which ones are turning on and off. If the IOC LED comes on at some point in the rotation, change the
transistor block connected to that driver.
Turn off the power and, after the main capacitors have discharged, re-connect the motor and test the
8.
entire motor power circuit for grounds again.
Turn power on and begin the start-up procedure again, turning up the ILIMIT potentiometer slowly to
9.
catch a possible overcurrent event.
OV/UV T
An OverVoltage/UnderVoltage (OV/UV) indication may come on for many reasons. The important point to
remember is that the OV/UV indicator applies to the BUS voltage.
Make sure there are no common buss connections or bus loaders causing problems with the proper charging
and maintenance of the bus voltage.
1.
2.
3.
4.
:
ESTS
Before turning off the main power, measure the AC line voltage at the input to the drive. It should be
the nameplate voltage +/- 10%. If it is not, correct it.
Assess when the OV/UV indication occurred. The OV/UV trip occurs:
If the BUS voltage exceeds 121% of nominal bus (see troubleshooting chart, page 35 for
•
voltages) for any period of time. This may occur if the line voltage exceeds 121% of nominal,
or
If the BUS voltage drops to less than 85% of nominal bus voltage for a period of time
•
exceeding 80 milliseconds (0.08 seconds), or
If the BUS voltage drops below 75% of nominal bus voltage for any length of time, or
•
If the charging contactor drops out.
•
In the case of 380VAC and 460VAC drives, check the balance of the voltage across the capacitor bank
halves. (Measure across R1 and R2). The voltages should not differ by more than 10%. If the voltages
are unbalanced, change the Capacitor board.
Do not assume that the AC line voltage which is measured while the drive is off will be the same while
the drive is running the motor under load. Measure the AC line voltage under both circumstances.
6/1/2001 © copyright 1997 by Powertec
Page 47

Model
Installation and Operation Manual
1000
Page
POWERTEC Model 1000 Drive Start Up and Troubleshooting Chart
NOTE: This chart assumes standard control connections
Yes
Release
START
Yes
+24V
?
No
Check
+24V
TB2-17(+)
TB2-12(-)
?
<21VDC
Shut off power
Unplug P3 and TB2
Reapply power
+24V
TB2-17(+)
TB2-12(-)
?
>21VDC
Shut off power
Plug In P3
Reapply power
+24V
TB2-17(+)
TB2-12(-)
?
and no options installed which affect speed control.
Button
CC = Current Controller board.
Is
ENBL LED
ON
?
No
+24V
TB2-7(+)
TB2-12(-)
?
Yes
PJ1
on CC
in RESET
position
?
No
Is
PL LED
Yes
<21VDC
>21VD
C
on CC
ON
?
No
Is
IOC LED
on CC
ON
?
No
Is
OVUV
LED on CC
ON
?
Replace
Capacitor Board
Check TB2
Connections
From
Page 3
Check
"START Button"
connections
This sequence
assumes that standard
control connections
are being used.
See page 17.
The voltages given
must be at the
indicated terminals
unless otherwise
indicated.
Check
"STOP Button"
connections
In some cases TB2 terminal
6 may not be used. If so,
skip this block.
Check "EMERG
STOP Button"
connections
Check
"Motor Thermal"
connections
Replace Speed
Controller Board
Check
disconnected
wires
Yes
Yes
Yes
Yes
Press START
Button and
Release
(See note
above)
Press and
HOLD START
Button
Yes
+24V
TB2-5(+)
TB2-12(-)
+24V
TB2-7(+)
TB2-12(-)
+24V
TB2-6(+)
TB2-12(-)
+24V
TB2-8(+)
TB2-12(-)
No
+24V
TB2-8(+)
TB2-12(-)
No
No
No
?
?
?
?
?
RUN LED
No
RUN LED
TB2-4(+)
TB2-12(-)
Replace Current
Controller Board
Replace Speed
Controller Board
No
Disconnect all
wires connected
to TB2-8
and TB2-17
Is
ON
?
Is
ON
?
No
+24V
?
No
Release
START
Button
Yes
Yes
>21VD
C
<21VDC
Page 4
TB2-5(+)
TB2-12(-)
"STOP Button"
connections
Replace Speed
Controller Board
No
Yes
No
Yes
Yes
Yes
45
To
Page 5
Check "EMERG
STOP Button"
connections
Set PJ1 jumper on
Current Controller
board to either INT
or MAN position
TRIP
Perform IOC
tests (page 38)
Perform OV/UV
tests (page 38)
Replace Cable
on P3 Connector
OFFICIAL 6/1/2001
Page 48

Page
46
Model
BLOCK DIAGRAM
BLOCK DIAGRAM ---- ---- SPEED CONTROLLER AND CURRENT CONTROLLER
BLOCK DIAGRAM BLOCK DIAGRAM
Installation and Operation Manual
1000
SPEED CONTROLLER AND CURRENT CONTROLLER
SPEED CONTROLLER AND CURRENT CONTROLLER SPEED CONTROLLER AND CURRENT CONTROLLER
6/1/2001 © copyright 1997 by Powertec
Page 49

Model
Installation and Operation Manual
1000
Page
POWERTEC Model 1000 Drive Start Up and Troubleshooting Chart
NOTE: This chart assumes standard control connections
and no options installed which affect speed control.
CC = Current Controller board.
Yes
ZERO SPD
LED ON
Is
?
From
Page 4
Increase SPEED
reference from
0% to 10%. If
ILIMIT is at full
CCW, turn it up
to 25% CW.
Page 5
Is
TAC LED
changing
?
No No
Yes
47
To
Page 6
STOP.
Turn off power.
Disconnect
TB1-7 and
TB1-8
+5VDC
TB1-8(+)
TB1-7(-)
?
Replace Current
Controller board
Yes
Check cable and/or
Change encoder
Disconnect motor
from load and
start over
Check connections
of T1, T2, T3 and cable
connections
Yes
Can
you
turn the shaft
by hand
?
No
Is
Dynamic
Braking
Installed
?
No
Yes
Yes
Measure voltages at
TB1-5 and TB1-6.
TB1-7 is common.
They switch between
0VDC and 8VDC as
the motor turns.
Yes
No
motor
connected
to load
No
STOP.
Turn off power.
Turn motor shaft
by hand.
Do NOT
re-apply power
Disconnect
Dynamic
Braking
+5VDC
TB1-8(+)
TB1-7(-)
Yes
Yes
Are
TB1-5 and
TB1-6 OK
Is
?
?
?
YesNo
No
Connect Motor
Power Leads
No
Re-Apply
Power and
Re-start
Yes
Can
you
turn the shaft
by hand
?
Is
motor
turning
?
No
Is
ILIMIT
LED
ON
?
Yes
Are
T1, T2, T3
connected
?
Yes
Can you
turn the shaft
by hand
?
Yes
No
Do
HS1, HS2,
HS3 change
?
Yes
VDC
at
TB2-18(+)
TB2-12(-)
?
>2.0VDC
Is
motor
turning
?
No
Is
ENBL
LED
ON
?
No
Is
STALL
LED
ON
?
Yes
Check motor load
and connections
+5VDC
No
TB1-8(+)
TB1-7(-)
<2.0VDC
speed
reference
at 10%
Change Speed
Yes
Controller board
Check Motor
Connections and
Yes
motor load
No
No
?
Yes
Is
Yes
?
TRIP
To Page 4
Replace Current
Controller board
Check cable and/or
Change encoder
Replace Speed
Controller board
No
Check motor
connections
OFFICIAL 6/1/2001
No
Check motor
connections
Check motor
connections
No
Fix speed reference
Page 50

Page
48
Model
Installation and Operation Manual
1000
DRIVER BOARD LAYOUT AND CONNECTIONS
DRIVER BOARD LAYOUT AND CONNECTIONS
DRIVER BOARD LAYOUT AND CONNECTIONSDRIVER BOARD LAYOUT AND CONNECTIONS
DRIVER BOARD LED’S
The base driver board LED’s turn on when current is being supplied to the bases of
the output power transistors.
For output transistor numbering, see the Simplified Power Schematic drawing on
page 36.
On the Model 1000 series non-regenerative drives, transistors #1, #2, and #3 (
referred to as the “top” transistors because they are connected to the positive side of the
bus) are “block fired”, i.e., they are on continuously while the motor is in a position where
they should be on. On a four-pole motor (standard motors with frame sizes from 42T
through 259T), each of the output transistors 1, 2, and 3 are on for 60 degrees of shaft
rotation. This makes the LED’s for transistors 1, 2, and 3 easy to see while the motor is
running.
Transistors #4, #5, and #6 are each enabled for 60 degrees of shaft rotation while
the motor is in the corresponding position, but the output transistor is controlled by a
“pulse-width modulation” (PWM) which is determined by the motor current required.
Under light loads, this means that the transistor may only be on 1 percent of the time. The
LED’s for #4, #5, and #6 (referred to as the “bottom” transistors because they are
connected to the negative side of the bus) therefore, may be difficult to see. As the load
increases on the motor, observation becomes easier.
The best way to check the LED’s on the Base Driver Board is to disconnect the
motor power leads T1, T2, and T3, start the drive, and rotate the motor shaft by hand.
Then all of the LED’s will come on at full brightness.
6/1/2001 © copyright 1997 by Powertec
Page 51

Model
Installation and Operation Manual
1000
Page
POWERTEC Model 1000 Drive Start Up and Troubleshooting Chart
NOTE: This chart assumes standard control connections
and no options installed which affect speed control.
CC = Current Controller board.
Yes
From
Page 5
Increase
SPEED
reference
from 10%
to 50%. If
CURRENT
LIMIT is
turned
down, turn
it up to
50% CW.
Is
motor at
50% speed
?
No
Page 6
50% speed refers to 1/2 of
the max speed of the motor.
49
Put Motor
In Service
Yes
Correct
Speed
Reference
Disconnect
load from the
motor and
start over
1st
Replace
Base Driver
Board
2nd
+5VDC
No Yes
Yes
No
TB2-10(+)
TB2-12(-)
?
Is
the load
connected to
the motor
?
No
Turn off power,
disconnect T1, T2,
T3. Turn on power
and rotate motor
by hand.
Are
all of the
Driver board
LED's OK
?
Yes
Is
CURRENT
LIMIT LED
On ?
Yes
Is
motor
running faster
No Yes
than 50%
?
Replace
Speed
Controller
board
No
No
Adjust
MAX pot
on Speed
Controller
board
Yes
Is
speed at
base speed
or more
?
No
Is
PHAD
LED
On ?
Yes
Is
motor an
F2 motor
?
No
Yes
Is
motor at
50% speed
?
No
Remove
Phase
Advance Chip
U8 on CCB
Replace
Current
Controller
board
Replace
Motor
reconnect T1, T2,
and T3. Replace
Speed Controller
OFFICIAL 6/1/2001
Turn off power,
board. Restart.
Is
Speed
at 50%
?
Replace
Capacitor
Board
Return to
YesNo
Start
Page 52

Page
50
Model
Installation and Operation Manual
1000
6/1/2001 © copyright 1997 by Powertec
 Loading...
Loading...