

Pilz 12-AA0-4-0-0-208-480VAC User Manual

PDrive
Motion Control PMC
User Manual – No. 21 511-EN-11
1 General Information
1.1 Copyright
Copyright 2010 Pilz GmbH & Co. KG
All rights reserved. The implementation of technical changes which improve the performance of
the product is subject to change without prior notification! The product or parts of the content
may be reproduced or transmitted in any form (by printing, photocopying, microfilm or any other
method) or stored, processed, copied or distributed by electronic means without the written
permission of Pilz GmbH & Co. KG.
1.2 Notice
Pilz GmbH & Co. KG reserves the right to make amendments to this document at any time.
The examples given serve only as illustrations. No guarantee is given for their suitability in
particular applications. Although the utmost care has been taken in the production of this
document, no liability can be accepted for any mistakes that it may contain. We welcome any
suggestions for the improvement of our products, or documentation.
1 General Information
We reserve the right to make technical changes, which lead to the improvement of the product!
1.3 Previously published editions
Version Notes
12/2001 Initial version: valid from software version version 2.01
V1-16-07-2002 Revised version: valid from software version 2.03
V2-20-11-2002 Revised version: valid from software version 2.04
V3-10-06-2003 Revised version: valid from software version 2.05
V4-11-05-2004 Revised version: valid from software version 2.06
V5-24-02-2005 Revised version: valid from software version 2.07
V6-23-08-2005 Revised version: valid from software version 2.08
V7-16-11-2005 Revision
V8-03-05-2006 Revised version: valid from software version 3.0
V9-12-10-2007 Revised version: valid from software version 3.1
V10-18-01-2008 Revised version: valid from software version 3.2
Page 2 User Manual for Setup Software PDrive

2 Table of contents
2 Table of contents
1 General Information...........................................................................................2
1.1 Copyright...........................................................................................................................2
1.2 Notice................................................................................................................................2
1.3 Previously published editions............................................................................................2
2 Table of contents...............................................................................................3
3 Symbols...............................................................................................................4
4 Safety Guidelines...............................................................................................5
5 About this manual..............................................................................................6
6 Prescribed use (“Use as directed”).................................................................7
7 Installation .........................................................................................................8
7.1 Hardware requirements.....................................................................................................8
7.2 Installation under Microsoft Windows................................................................................8
8 Use.......................................................................................................................9
8.1 Notes.................................................................................................................................9
8.2 Connection .......................................................................................................................9
8.3 Screen layout...................................................................................................................11
8.3.1 Title bar............................................................................................................................12
8.3.2 Menu bar.........................................................................................................................12
8.3.3 Tool bar...........................................................................................................................14
8.3.4 Service bar......................................................................................................................15
8.3.5 Status bar........................................................................................................................16
8.3.6 Select servo amplifier......................................................................................................16
8.3.7 Project window.................................................................................................................17
9 Project window.................................................................................................18
9.1 Setup...............................................................................................................................18
9.1.1 Basic setup......................................................................................................................18
9.1.2 Units................................................................................................................................19
9.1.3 CAN/Fieldbus..................................................................................................................20
9.1.4 Feedback.........................................................................................................................21
9.1.5 Motor...............................................................................................................................23
9.1.6 Current controller.............................................................................................................25
9.1.7 Speed controller..............................................................................................................26
9.1.8 Position controller............................................................................................................28
9.1.9 Electronic Gearing...........................................................................................................29
9.1.10 Encoder...........................................................................................................................30
9.1.11 Digital I/O.........................................................................................................................31
9.1.12 Analog I/O........................................................................................................................32
9.2 Positioning.......................................................................................................................33
9.2.1 Homing............................................................................................................................33
9.2.2 Position Data...................................................................................................................40
9.2.3 Motion task......................................................................................................................42
9.2.4 Position registers.............................................................................................................47
9.3 Status..............................................................................................................................48
9.4 Monitor.............................................................................................................................48
9.5 Screen page „Expansion Card“.......................................................................................49
9.5.1 Expansion card "DA1" ....................................................................................................49
9.5.2 Expansion card "D1"........................................................................................................50
9.5.3 Profibus DP Expansion card............................................................................................51
9.5.4 Expansion card PMCprimo..............................................................................................52
9.5.5 Expansion card PMCprotego S.......................................................................................53
10 Index..................................................................................................................54
User Manual for Setup Software PDrive Page 3
3 Symbols
Symbol Meaning
3 Symbols
This symbol indicates a possible danger, hazard, risk to life and/ or
health. Ignorance may seriously affect health and cause dangerous
injuries.
VER ]
[
•
⇒
This symbol indicates an important hint regarding the correct use of the
product. Ignorance may affect the performance of the machinery and/or
the surrounding.
This parameter applies only
PMCprimo Drive2
This parameter applies only
PMCprimo Drive3
This parameter applies only
Reference to the according command in the onlne help (example
command „VER“)
Emphasis
see page (cross reference)
to a PMCtendo DD4 and
to a PMCtendo DD5 and
to a PMCprotego D.
Page 4 User Manual for Setup Software PDrive

4 Safety Guidelines
4 Safety Guidelines
● When commissioning, you must ensure that neither the controllers nor the amplifiers
present any risk to persons, plant or machinery. Appropriate protection and
precautionary measures must be put in place.
● To avoid personal injury and material damage, only qualified, trained personnel should
work on the devices.
● Only specialist staff with extensive knowledge of drive technology and control
engineering should be permitted to program a running drive online. Data stored on data
media is not protected from unintended changes by third parties. Data must be
checked for accuracy before it is loaded on to the hardware.
● The installation and operating instructions must be read carefully and all safety
regulations observed before installation and initial operation as danger to personnel and
damage to machinery may be caused.
● Only qualified and well-trained specialists who are familiar with the transportation,
installation, initial operation, maintenance and operation of the units as well as with the
relevant standards may carry out the corresponding works.
● Technical data and indications (Type tag and documentation) are to be kept absolutely.
User Manual for Setup Software PDrive Page 5
5 About this manual
This documentation explains the use of the PDrive.exe setup software for setting
parameters and configuring servo amplifiers of the PMCtendo DD4/5, PMCprimo Drive2/3 and
PMCprotego D series.
The series PMCprimo Drive2/3 differ from the series PMCtendo DD4/5 only in the motion
control functionality.
For this reason the series PMCprimo Drive2/3 is not mentioned furthermore in this
manual. Parameters for the PMCtendo DD4 are concerning the PMCprimo Drive2 too and
parameters for the PMCtendo DD5 the PMCprimo Drive3.
Detailed descriptions of functions and parameters are located in the Object Reference Guide.
The setup software must be installed on a personal computer (PC). The PC is connected
to the servo amplifier by a communication cable. The setup software initiates the communication
between PC and servo amplifier.
With very little effort you can alter parameters and instantly observe the effect on the servo
amplifier, since there is a continuous (online) connection to the amplifier. At the same time,
important actual values are read out from the servo amplifier and displayed on the monitor of the
PC.
5 About this manual
Any interface modules (expansion cards), which may be built into the servo amplifier, are
automatically recognized and the additional parameters required for position control or motionblock definition are made available.
You can save sets of data on data media (archiving), and load them again. You can also
print out the data sets.
We provide you with default sets of motor-specific data for all the reasonable combinations of
servo amplifier and motor. In most applications you will be able to commission your drive
without any problems, just by using these default values.
Knowledge of the Microsoft Windows operating system and the use of a personal
computer is assumed.
You must follow the safety, installation and commissioning instructions in the
installation manual for the servo amplifier that is used.
We provide training and familiarization courses on request.
Page 6 User Manual for Setup Software PDrive
6 Prescribed use (“Use as directed”)
6 Prescribed use (“Use as directed”)
The setup software PDrive is intended to be used for altering or storing the operational
parameters for the servo amplifiers of the PMCtendo DD4/5, PMCprimo Drive2/3 and
PMCprotego D series. The servo amplifier that is connected is commissioned with the aid of the
software - whereby the drive can be directly controlled by the setup and service functions.
The characteristic nature of a PC means that these functions are not functionally safe
without further measures. A PC-program might be unexpectedly disturbed or stopped, so
that in the event of a malfunction any movements that have already been initiated cannot
be stopped from the PC.
The manufacturer of the machine must carry out a hazard analysis for the machine, and
is responsible for the functional, mechanical and personnel safety aspects of the
machine. This applies especially to the initiation of movements with the aid of functions
in the commissioning software.
Only personnel who have extensive knowledge in the fields of drive technology and
control technology are permitted to carry out online parameter setting of a drive that is
running.
Sets of data that are stored on data media are not safe from undesirable alteration by
third parties. So after you have loaded a set of data, you must check all the parameters
before enabling the servo amplifier.
The servo amplifiers are components that are built into electrical equipment or machines,
and can only be operated as integral components of such equipment.
The BTB/RTO contact must be wired into the safety loop of the system. The safety loop,
and the Stop and Emergency Stop functions must fulfil the requirements of EN 60204,
EN 292 and VDI 2853.
User Manual for Setup Software PDrive Page 7
7 Installation
7.1 Hardware requirements
Minimum specification for the PC:
7 Installation
Operating system
Hardware
Interface
Windows 2000, XP, Vista or 7
Minimum requirements of operating system
one free serial interface
Ethernet interface (optional)
7.2 Installation under Microsoft Windows
The PC interface (X6, RS232) of the servo amplifier is connected to the serial interface of the
PC.
You can order the necessary programming cable from us or make one up yourself. The pin
assignment can be found in the installation manual of the servo amplifiers.
Start your PC and insert the Motion Control Tools-CD into the CD-ROM drive. The installation
software will start automatically. Otherwise start MInstall.exe on the CD-ROM.
Click on „Install Motion Control Tools“ and follow the instructions.
Page 8 User Manual for Setup Software PDrive
8 Use
8Use
8.1 Notes
The setup software is basically used in the same way as other Windows programs. Use a
decimal point as the decimal symbol, do not use a comma.
Please note that, after an alteration in a parameter on a screen page, you must first press
„Return“ or select an other parameter on the page, so that the parameter is transferred to
the RAM of the servo amplifier.
If a reset of the servo amplifier is necessary to activate a function, this will be recognized by the
setup software, which will make a reset after a software confirmation request.
The currently valid data set must be saved in the EEPROM of the servo amplifier, in order to be
permanently stored. So execute the Save Data to EEPROM function on the service bar before
you switch off the servo amplifier or quit processing the data set.
8.2 Connection
Connect the interface cable to a serial interface on your PC and to the serial interface of the
servo amplifier.
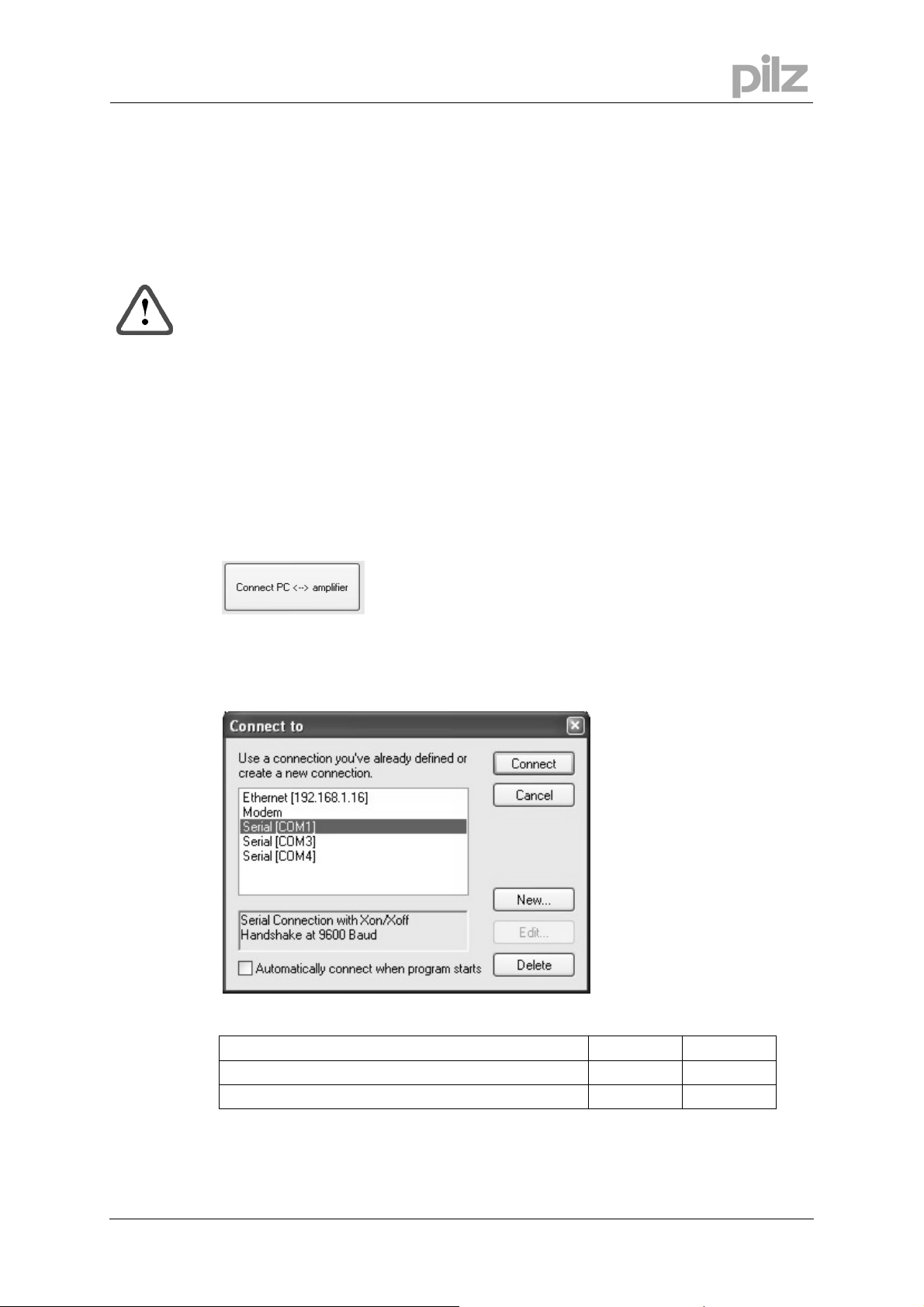
Start PDrive.exe and click to the button:
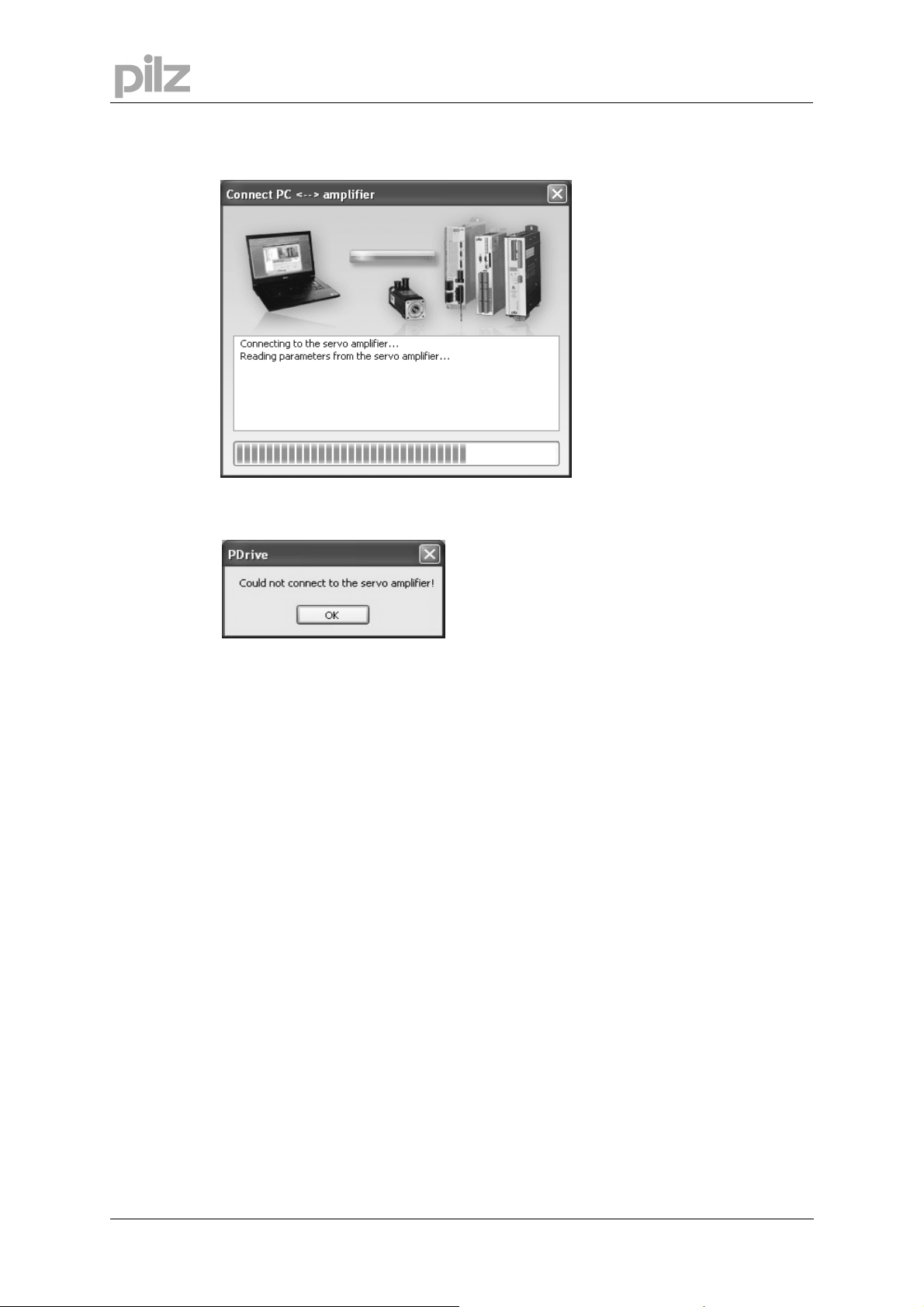
PDrive is trying to read data from the servo amplifier.
If you have never started a communication before, you have to configure the communication
parameters first (PTerm):
Choose a connection, set the
connection parameters and click
to „Connect“.
Connection parameter:
Device Baud rate Handshake
PMCtendo DD4 / PMCprimo Drive2 9600 XON/XOFF
PMCtendo DD5 / PMCprimo Drive3 / PMCprotego D 38400 XON/XOFF
User Manual for Setup Software PDrive Page 9
8 Use
PDrive is now reading the actual parameters of the servo amplifier.
A previously opened data set in PDrive will be overwritten with the new data.
If there is no communication possible, you will receive this message:
In this case check the following:
1. Is the servo amplifier's 24V supply voltage connected?
2. Has the correct PC interface been selected?
3. Has the correct servo amplifier interface been selected?
4. Has an incorrect connection cable been used?
5. Has the correct baud rate been set?
Find the error, rectify it and then restart the connection.
Page 10 User Manual for Setup Software PDrive
8 Use
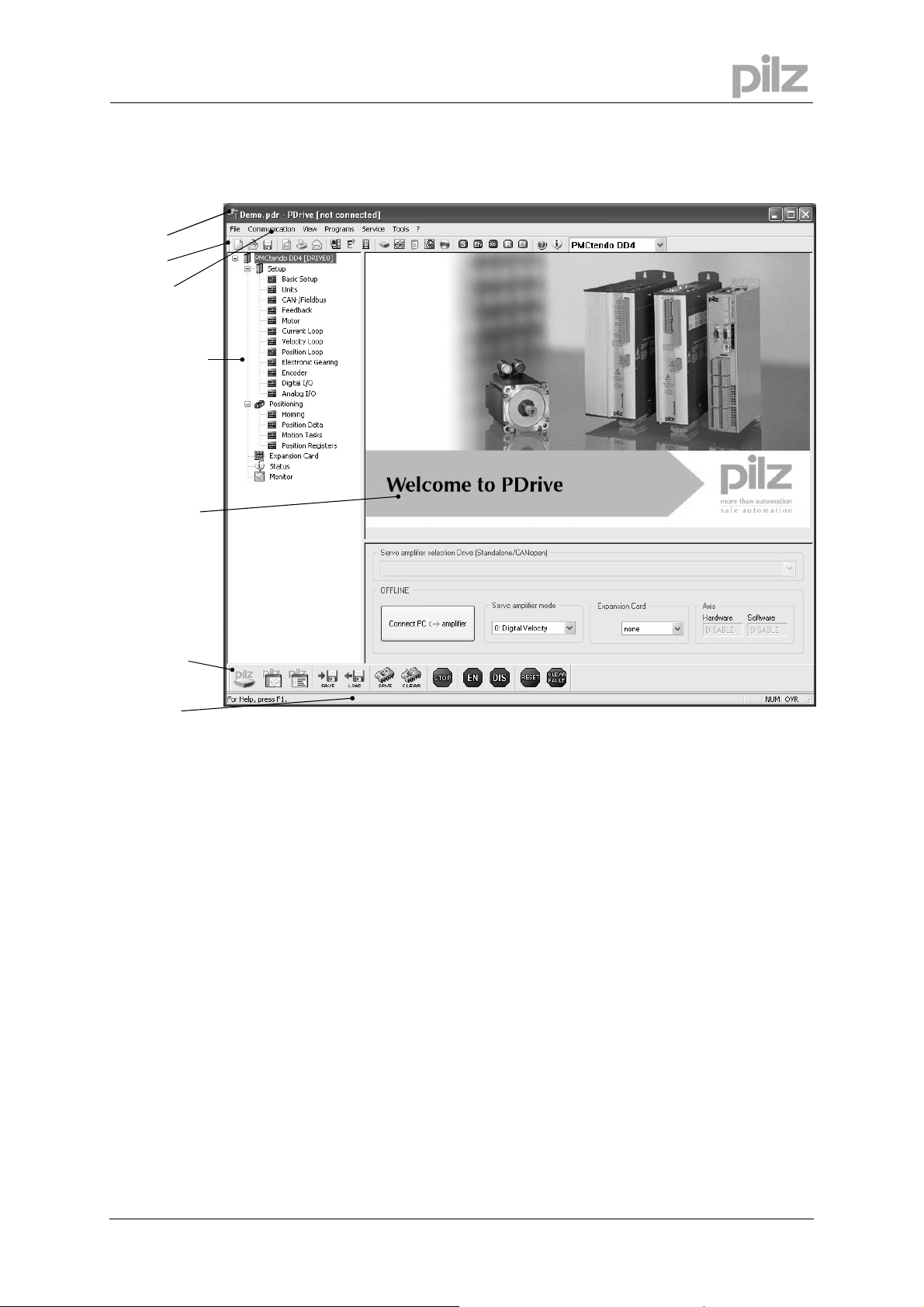
8.3 Screen layout
Title bar
Tool bar
Menu bar
Project window
Main window
Service bar
Status bar
Title bar The program name and the name of the currently opened document are displayed in the title
bar.
Furthermore the connection status will be shown ("connected" or "not connected").
Tool bar The typical Windows-style buttons can be used for a direct start of individual functions.
Menu bar Access to several program functions using Windows menus.
Main view The main frame allows changing parameters, monitoring actual values of the servo amplifier
and selecting functions.The lower part of this window shows the communication status, the
operate mode, the expansion cards and the axis status. In a network the servo amplier can be
changed in this window, too.
Service bar Service functions for operating the servo amplifier.
Status bar Current information about the data communication is shown here.
Project window In a structure similar to Windows Explorer, links to all screen pages are listed that you need for
setup, optimizing and monitoring of the servo amplifier. The selected screen is shown in the
main frame. The top level of the tree shows the name of the connected servo amplifier.
User Manual for Setup Software PDrive Page 11
8.3.1 Title bar
The program name and the name of the currently opened document are displayed in the title
bar.
Furthermore the connection status will be shown ("connected" or "not connected").
8.3.2 Menu bar
File
New Creates a new parameter file.
Open... Opens a parameter file: A parameter data set is read from the
Save parameters Saves the current parameter data set to a data medium (hard
Save parameters as... Saves the current parameter data set to a data medium (hard
Export as FB for
SoftPLC
Print... The current data set will be printed out. You can choose whether
Print preview /
Print setup...
Send... Sends the actual data file via E-mail.
Exit Terminates the program.
8 Use
data medium (hard drive, floppy disk). If there is an active
connection, the data set is downloaded to the servo amplifier.
disk, diskette) while keeping the file name, if the data set already
has a name. If the data set has not yet got a name, you will be
prompted to enter a name and storage location.
disk, diskette). You will be prompted to enter a name and storage
location.
Exports the actual parameters into a EXP file. This file can be
imported in the windows program CoDeSys for a Software-PLC.
the print data are sent to the system printer or saved to a file.
Use these functions in the same way as for any other Windows
software.
Communication
Connect / Disconnect
PC ↔ amplifier
Save parameters to
EEPROM
Load default
parameters to RAM /
EEPROM
View
Toolbar
Status bar
Service bar
Programs
PTerm
PScope
PEdit
PMotion
primoFTP
Connect or disconnect PDrive and servo amplifier.
Saves the current parameter data set permanent in the EEPROM
of the servo amplifier.
Reset all parameters and load the default parameters to RAM /
EEPROM.
Switch to show/hide the toolbar (above) or the service bar and
status bar (below).
Starts the tools PTerm (terminal program) ,PScope (scope
function), PEdit (text editor), PMotion (motion generator) or
primoFTP (PMCprimo FTP program).
Page 12 User Manual for Setup Software PDrive
8 Use
Service
STOP amplifier Stops the current service function.
ENABLE amplifier Enables the servo amplifier by software.
DISABLE amplifier Disables the servo amplifier by software.
RESET amplifier Software reset of servo amplifier.
CLRFAULT Clears the current errors and warnings.
Tools
Options Settings for using the program.
- Show tooltips.
- Default values for PMCprimo Drive.
User Manual for Setup Software PDrive Page 13
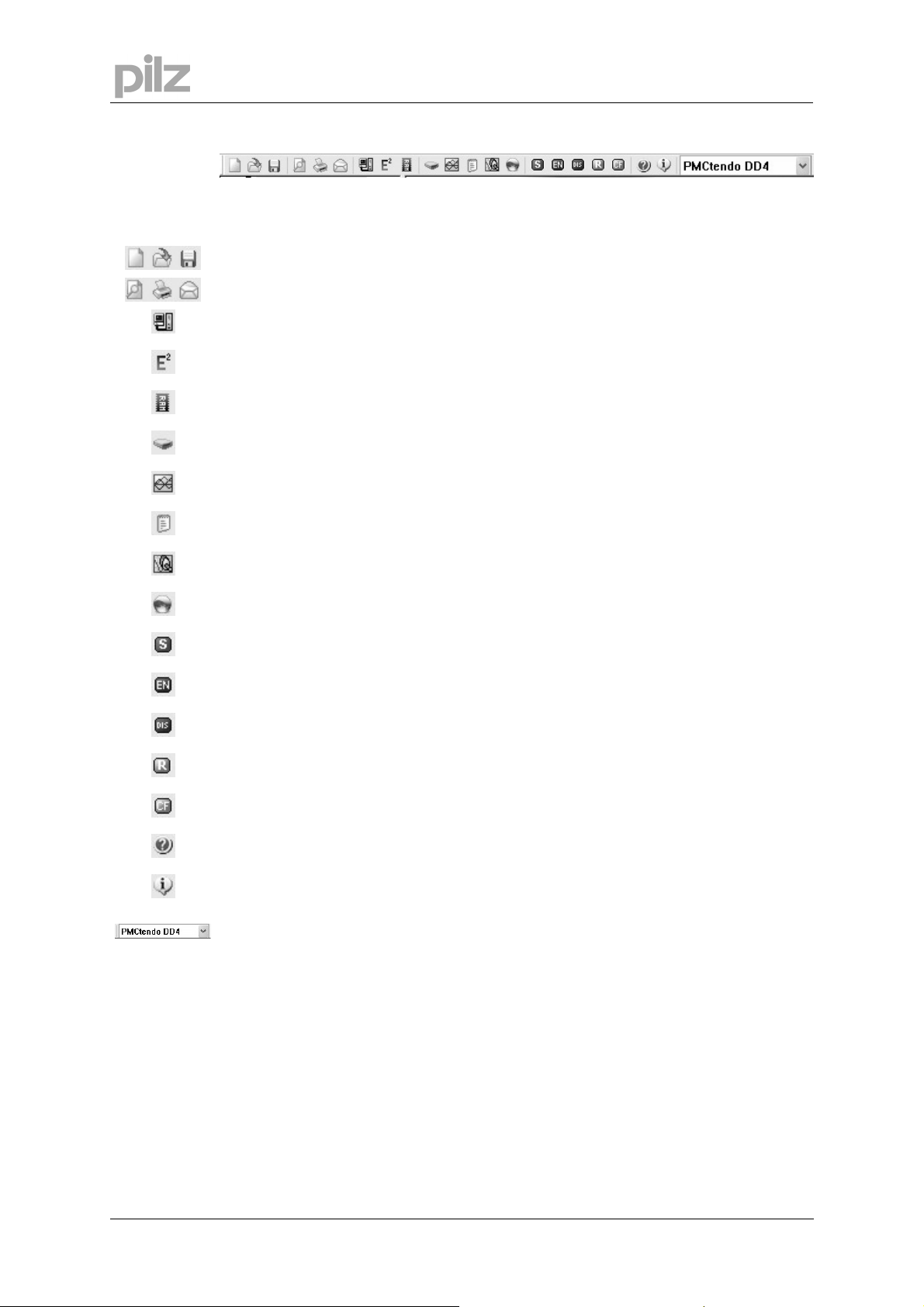
8.3.3 Tool bar
All symbols of the toolbar and their meaning:
Standard Windows:
New – open – save
Search – print – send
Connect / Disconnect PC <--> amplifier:
Reads actual parameters from the amplifier. Clicking again diconnects the communication.
Save parameters to EEPROM:
Saves the current parameter data set permanent in the EEPROM of the servo amplifier.
Load default parameters to RAM / EEPROM:
Reset all parameters and load the default parameters to RAM / EEPROM.
PTerm:
Starts PTerm.exe.
PScope:
Starts PScope.exe.
PEdit:
Starts PEdit.exe.
PMotion:
Starts PMotion.exe.
PrimoFTP:
Start primoFTP.exe.
STOP amplifier:
Stopps the current service function and disables power stage.
ENABLE:
Enables power stage.
DISABLE:
Disables power stage.
RESET amplifier:
Software reset of servo amplifier.
Clear Fault:
Clears the current errors and warnings.
Help topics:
Starts online help for PDrive.
Info:
Displays program information, version number and copyright of PDrive.
Current device:
In offline mode, selection as to whether a DD4, DD5 or PMCprotego D parameter file is to be
created. In online mode, displays whether there is a connection to DD4, DD5 or PMCprotego D.
8 Use
Page 14 User Manual for Setup Software PDrive
8 Use
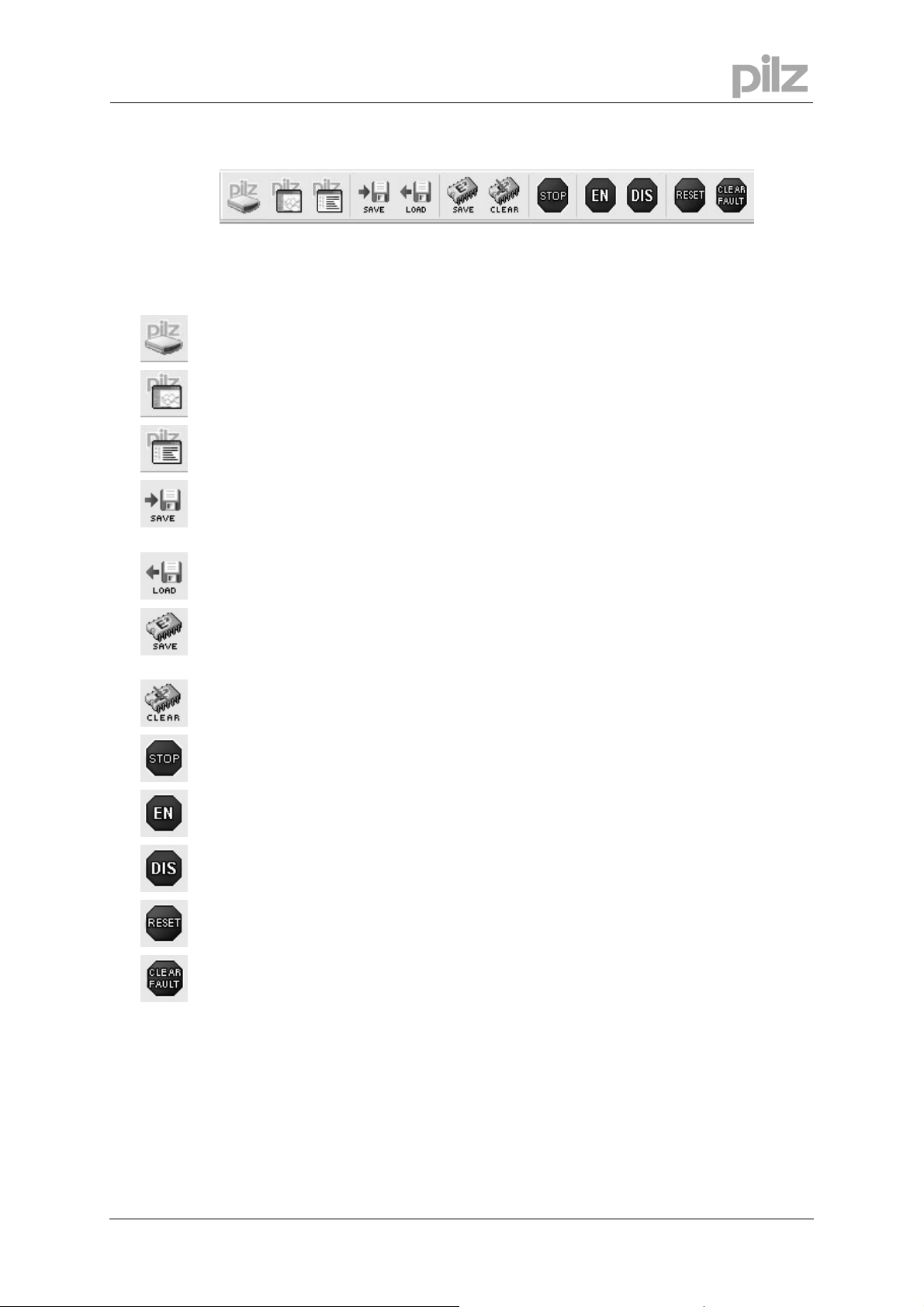
8.3.4 Service bar
With the service bar you have a direct access to important service functions of the servo
amplifier.
PTerm:
Starts PTerm.exe.
PScope:
Starts PScope.exe.
PEdit:
Starts PEdit.exe.
Save:
Saves the current parameter/motion task data set to a data medium (hard drive, floppy disk). If
the data set does not yet have a file name, you will be prompted to enter a name and storage
location.
Load:
Opens a parameter file: A parameter data set is read from the data medium (hard drive, floppy
disk). If there is an active connection, the data set is downloaded to the servo amplifier.
Save data in EEPROM:
Non-volatile storage of the currently valid parameter set in the EEPROM of the servo amplifier.
In this way you can permanently save all the parameter changes that you have made since the
last switch-on/reset of the servo amplifier.
Load default parameters to RAM / EEPROM:
Cancel all the parameters that have been set up, and load the manufacturer’s default values.
STOP amplifier:
Stop the currently active service function and disables the power stage.
ENABLE:
Enables the power stage.
DISABLE:
Disables the power stage.
RESET amplifier:
Software-reset of the servo amplifier.
Clear Fault:
Clear the present errors and warnings.
User Manual for Setup Software PDrive Page 15
8.3.5 Status bar
Current information about the data communication is shown here.
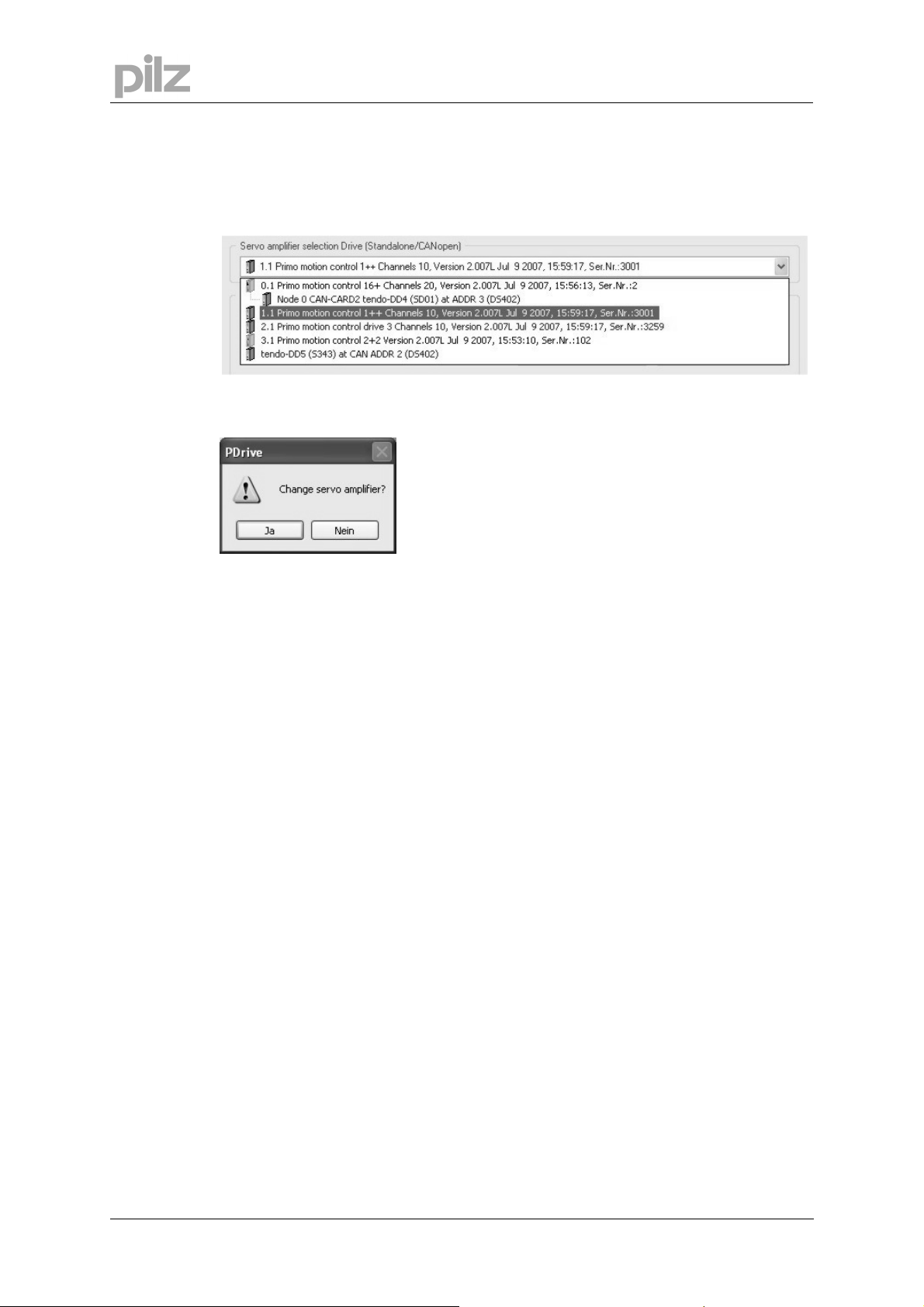
8.3.6 Select servo amplifier
In a network you can change the actual servo amplifier here.
The following message box appears:
8 Use
After clicking „Yes“ PDrive reads the data of the chosen servo amplifier.
Page 16 User Manual for Setup Software PDrive
8 Use
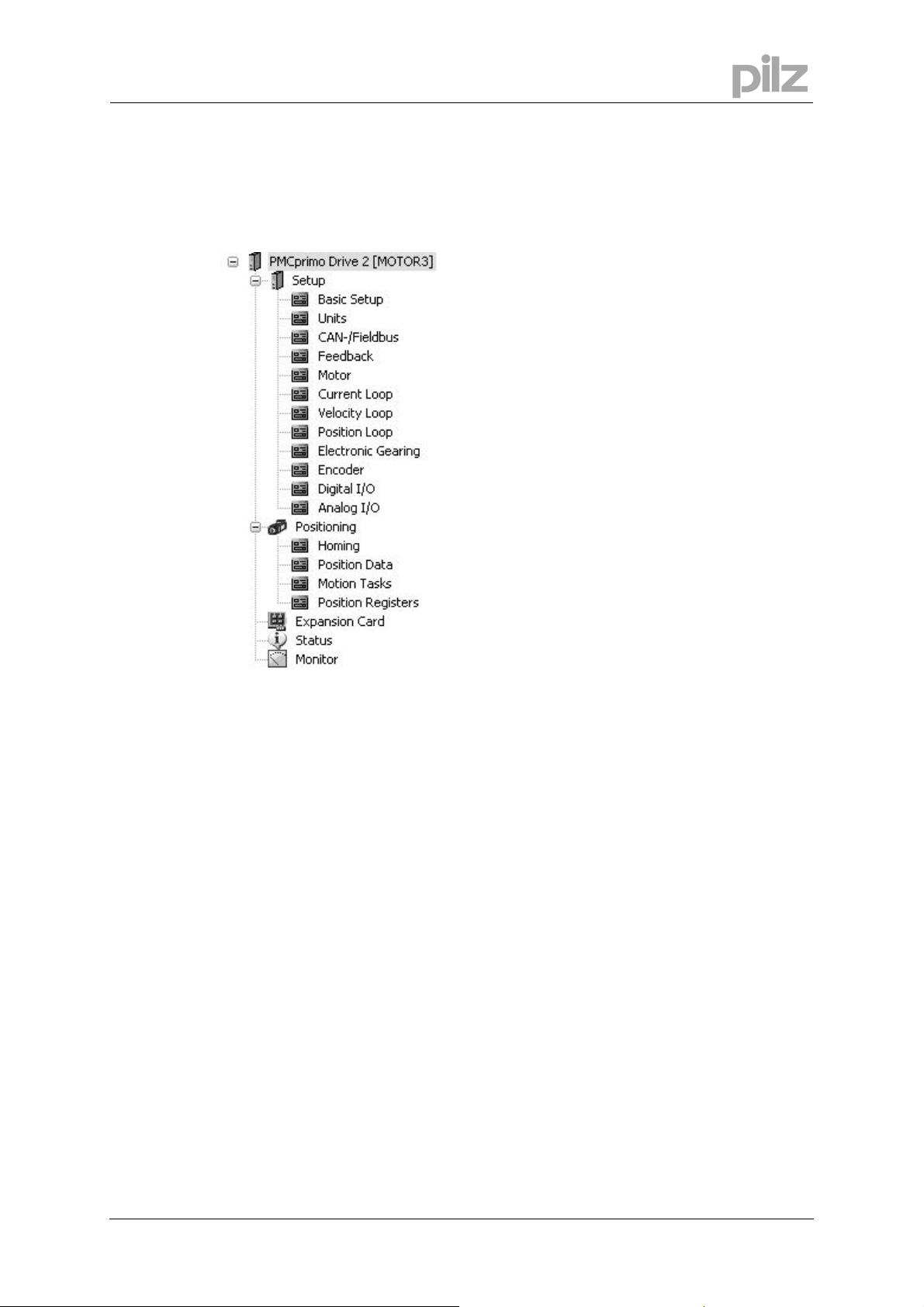
8.3.7 Project window
In a structure similar to Windows Explorer, links to all screen pages are listed that you need for
setup, optimizing and monitoring of the servo amplifier.
The selected screen is shown in the main frame.
The top level of the tree shows the name of the
connected servo amplifier
(PMCprimo Drive2[MOTOR3] in the example).
Below there is a summary of all pages for
parametrization and setup of the servo amplifier
(„Setup“).
„Positioning“ combines all pages which deal with
moving and motion tasks .
Under „Expansion Card“ you can setup
expansion cards.
„Status“ and „Monitor“ display the current status of
the servo amplifier and important parameters.
User Manual for Setup Software PDrive Page 17
9 Project window
9.1 Setup
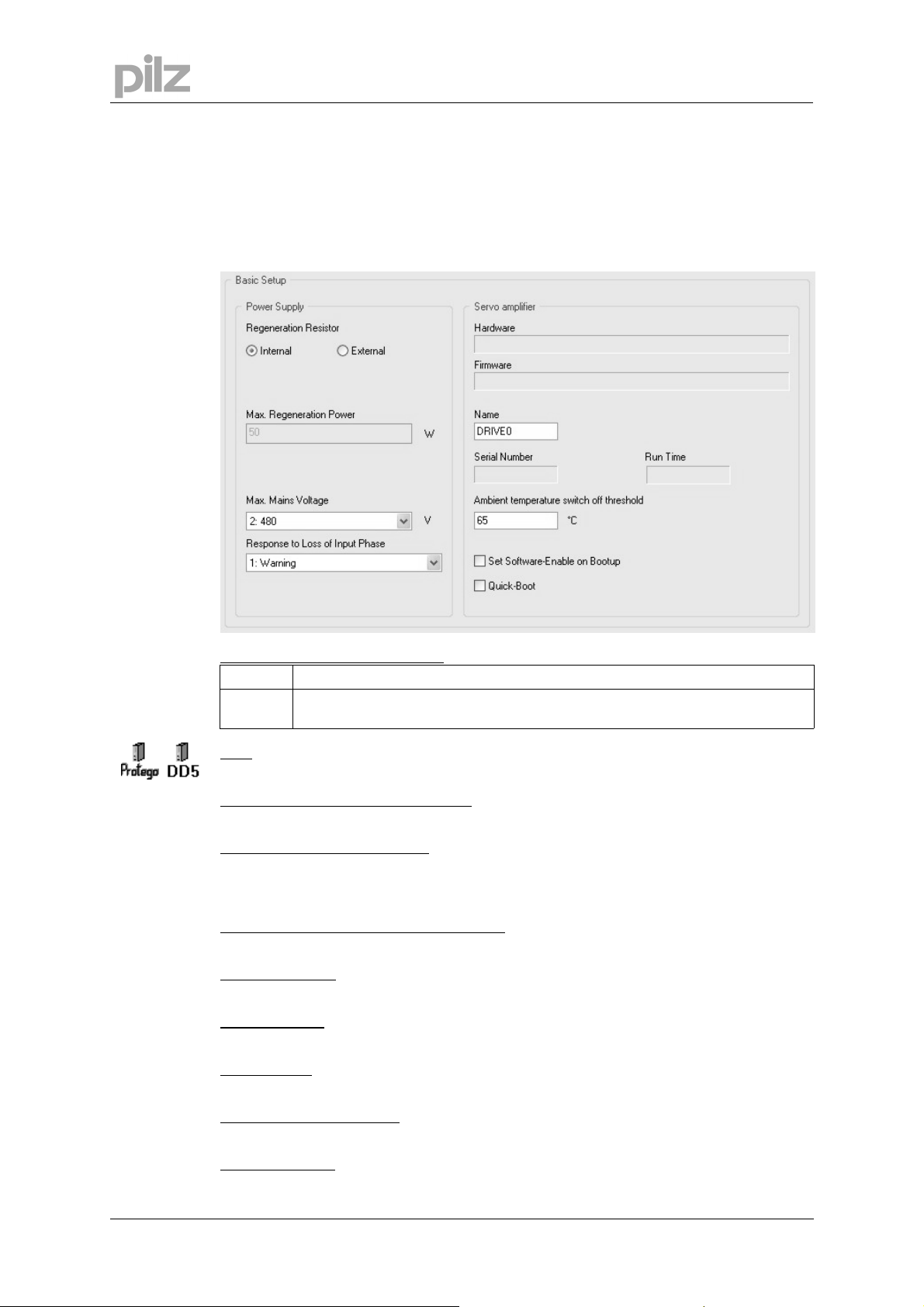
9.1.1 Basic setup
9 Project window
Regeneration resistor [ PBALRES ]
Internal The internal regeneration resistor is used.
External An external regeneration resistor, connected to the terminals +R
used.
- PMCtendo DD5 and PMCprotego D only
Ohm
Sets the value of the regeneration resistor in unit Ohm.
Max. Regeneration Power [
Set the maximum Regen Power.
Max. Mains Voltage [
This parameter is used to adjust the regeneration and switch-off levels of the servo amplifiers to
suit the mains power supply voltage or the system conditions for multi-axis systems with
parallel-connected DC-link circuits.
Response to Loss of Input Phase [
Handles the message „Phase missing“.
Hardware [
Display the version and revision level of the servo amplifier hardware.
Firmware [
Display the version and revision level of the servo amplifier firmware.
Name [
Here you can assign a name (8 chars max.) to the servo amplifier.
HVER ]
VER ]
ALIAS ]
PBALMAX ]
VBUSBAL ]
PMODE ]
and -RB , is
bext
Serial Number [
Display the serial number of the servo amplifier.
Run Time [
Display the operational time of the servo amplifier, saved at 8 min. intervals.
Page 18 User Manual for Setup Software PDrive
SERIALNO ]
TRUN ]
 Loading...
Loading...