

Page 1

PicoLog® 1000 Series
USB Data Loggers
Programmer's Guide
pl1000pg r7
Page 2

Page 3

Contents
1 Introduction ......................................................................................................................... 1
1 Overview ................................................................................................................................................. 1
2 Software license conditions .................................................................................................................. 2
3 Trademarks ............................................................................................................................................ 2
2 Getting started .................................................................................................................... 3
1 About the driver ...................................................................................................................................... 3
2 Installing the driver ................................................................................................................................. 3
3 Connecting the logger ............................................................................................................................ 3
4 USB ADC-11 compatibility mode ........................................................................................................... 3
3 Technical reference ............................................................................................................ 5
1 Capture modes ....................................................................................................................................... 5
2 Scaling .................................................................................................................................................... 5
4 Driver routines .................................................................................................................... 6
IPicoLog 1000 Series Programmer's Guide
1 Summary ................................................................................................................................................. 6
2 pl1000CloseUnit() - close the unit ......................................................................................................... 7
3 pl1000GetSingle() - get a single value from a specified channel ........................................................ 8
4 pl1000GetUnitInfo() - return information about the unit ...................................................................... 9
5 pl1000GetValues() - get a number of sample values after a run ...................................................... 10
6 pl1000MaxValue() - return the maximum ADC value ......................................................................... 11
7 pl1000OpenUnit() - open and enumerate the unit .............................................................................. 12
8 pl1000OpenUnitAsync() - open the unit without waiting for completion .......................................... 13
9 pl1000OpenUnitProgress() - report progress of pl1000OpenUnitAsync() ........................................ 14
10 pl1000PingUnit() - check that the unit is responding ...................................................................... 15
11 pl1000Ready() - indicate when pl1000Run() has captured data ..................................................... 16
12 pl1000Run() - tell the unit to start capturing data ............................................................................ 17
13 pl1000SetDo() - control the digital outputs on the unit ................................................................... 18
14 pl1000SetInterval() - set the sampling speed of the unit ................................................................ 19
15 pl1000SetPulseWidth() - configure the PWM output ....................................................................... 20
16 pl1000SetTrigger() - set the trigger on the unit ................................................................................ 21
17 pl1000Stop() - abort data collection ................................................................................................. 22
18 PICO_STATUS values ......................................................................................................................... 23
5 Glossary ............................................................................................................................ 25
Index ..................................................................................................................................... 27
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved. pl1000pg r7
Page 4

Page 5

PicoLog 1000 Series Programmer's Guide 1
Version
Part No.
Resolution
Channels
PicoLog 1012
PP543
10 bits
12
PicoLog 1216
PP544
12 bits
16
1 Introduction
1.1 Overview
The PicoLog 1000 Series PC Data Loggers are medium-speed, multichannel
voltage-input devices for sampling analog data using a PC. This manual
explains how to use the Application Programming Interface to write your
own programs to control the unit. You should read it in conjunction with the
PicoLog 1000 Series User's Guide.
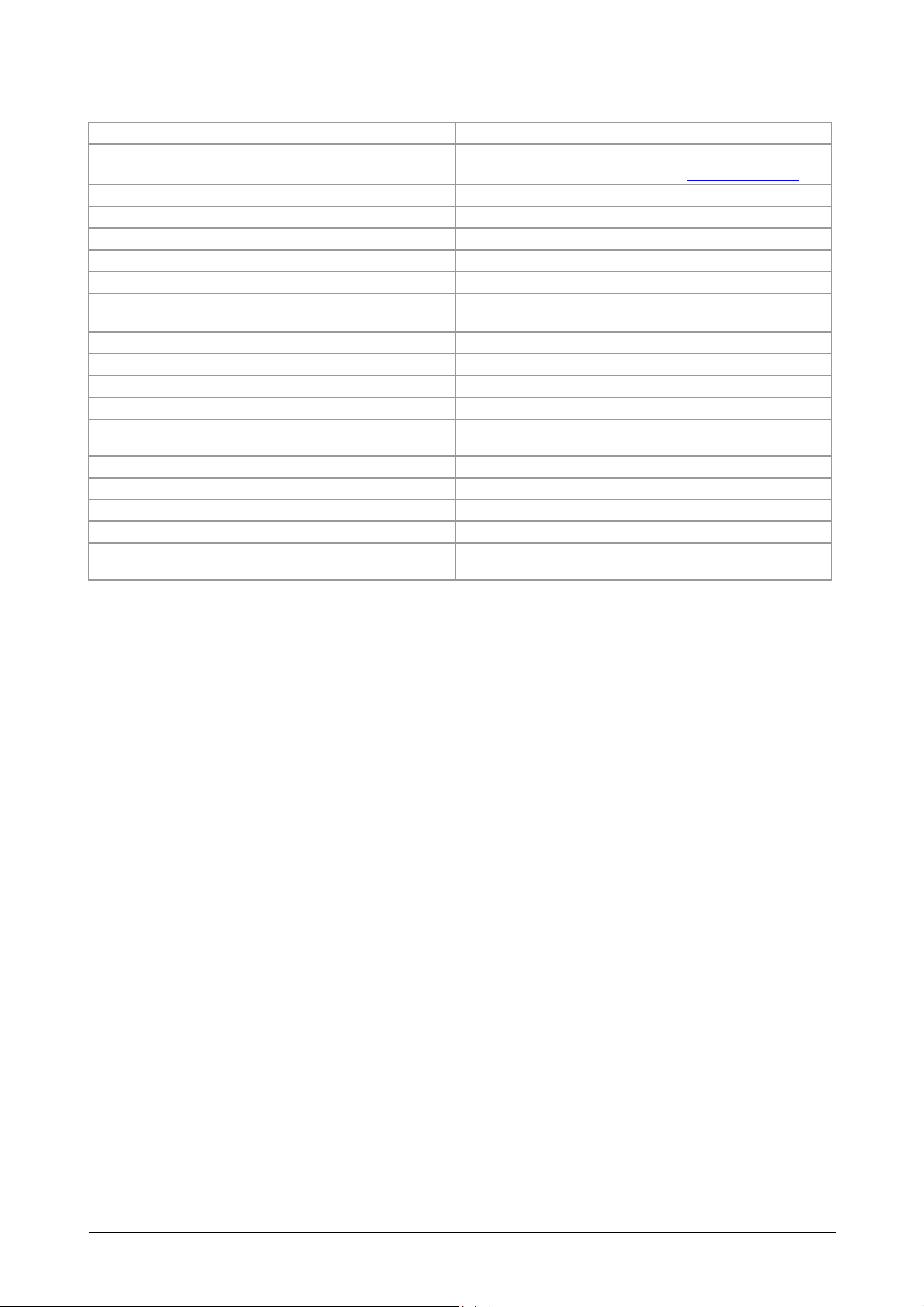
The following PicoLog 1000 Series Data Loggers are available:
These devices can also be used with the PicoLog data logging software and the PicoScope oscilloscope
software.
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved. pl1000pg r7
Page 6

Introduction2
1.2 Software license conditions
The material contained in this release is licensed, not sold. Pico Technology Limited grants a license to the
person who installs this software, subject to the conditions listed below.
Access. The licensee agrees to allow access to this software only to persons who have been informed of
these conditions and agree to abide by them.
Usage. The software in this release is for use only with Pico products or with data collected using Pico
products.
Copyright. Pico Technology Ltd. claims the copyright of, and retains the rights to, all material (software,
documents, etc.) contained in this SDK except the example programs. You may copy and distribute the SDK
without restriction, as long as you do not remove any Pico Technology copyright statements. The example
programs in the SDK may be modified, copied and distributed for the purpose of developing programs to
collect data using Pico products.
Liability. Pico Technology and its agents shall not be liable for any loss, damage or injury, howsoever
caused, related to the use of Pico Technology equipment or software, unless excluded by statute.
Fitness for purpose. As no two applications are the same, Pico Technology cannot guarantee that its
equipment or software is suitable for a given application. It is your responsibility, therefore, to ensure that
the product is suitable for your application.
Mission-critical applications. This software is intended for use on a computer that may be running other
software products. For this reason, one of the conditions of the license is that it excludes use in missioncritical applications, for example life support systems.
Viruses. This software was continuously monitored for viruses during production, but you are responsible
for virus-checking the software once it is installed.
Support. If you are dissatisfied with the performance of this software, please contact our technical support
staff, who will try to fix the problem within a reasonable time. If you are still dissatisfied, please return the
product and software to your supplier within 14 days of purchase for a full refund.
Upgrades. We provide upgrades, free of charge, from our web site at www.picotech.com. We reserve the
right to charge for updates or replacements sent out on physical media.
1.3 Trademarks
Pico Technology, PicoLog and PicoScope are trademarks of Pico Technology Limited, registered in the
United Kingdom and other countries.
PicoScope and Pico Technology are registered in the U.S. Patent and Trademark Office.
Windows is a registered trademark of Microsoft Corporation in the USA and other countries.
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved.pl1000pg r7
Page 7

PicoLog 1000 Series Programmer's Guide 3
2 Getting started
2.1 About the driver
The PicoLog 1000 Series units are supplied with a kernel driver and a DLL containing routines that you can
call from your own programs. The drivers are supported by the following operating systems:
·
Windows 7
·
Windows 8
·
Windows 10
The PicoSDK containing the drivers is available in 32-bit and 64-bit versions from
www.picotech.com/downloads. The 32-bit driver will run on a 64-bit Windows system if you write a 32-bit
application and run it under WoW64.
The DLL can be used with any programming language or application that can interface with DLLs: for
example, C, Visual Basic for Applications (VBA) and LabVIEW. Example code is available in numerous
repositories under the "picotech" organisation on GitHub. Some of these examples are fairly simple, but the
C console mode example, pl1000con.c, demonstrates most of the facilities available in the driver.
The driver supports up to 64 USB units at one time.
2.2 Installing the driver
The driver is included in PicoSDK, which you can download from www.picotech.com/downloads.
Select PicoLog Data Loggers > PicoLog 1012 or PicoLog 1216 > Software > PicoSDK.
2.3 Connecting the logger
Before you connect your logger, please install the driver software.
To connect the data logger, plug the cable provided into any available USB port on your PC. The first time
you connect the unit, Windows may display a New Hardware Wizard. Follow any instructions in the Wizard
and wait for the driver to be installed. Later versions of Windows display an Installing new hardware
message and complete the process automatically. The unit is then ready for use.
2.4 USB ADC-11 compatibility mode
The PicoLog 1000 Series data loggers may be used as replacements for the USB ADC-11, an 11-channel
data logger previously available from Pico Technology. The 1000 Series units have all the functions of the
USB ADC-11 and some extra functions such as extra digital outputs, a PWM output and a sensor power
output.
The 1000 Series units are API-compatible with the USB ADC-11. This means that any programs that you
have already written do not need to be changed or recompiled - you simply need to update the
usbadc11.dll to the latest version supplied in PicoSDK. The 1000 Series unit will behave like a USB ADC-
11 and the extra outputs (pins 15 to 25) will be internally disconnected. You can continue to use the unit with
an old ADC-11 terminal board if you have one, or you can switch to the new Small Terminal Board (PP545).
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved. pl1000pg r7
Page 8

Getting started4
If you wish to use the extra functions of the 1000 Series units, you must rewrite your application to use the
new PicoLog 1000 Series DLL (pl1000.dll), which is described in this manual and is available free of
charge from Pico Technology. Example code is available to help you make the transition.
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved.pl1000pg r7
Page 9

PicoLog 1000 Series Programmer's Guide 5
3 Technical reference
3.1 Capture modes
Three modes are available for capturing data:
·
BM_SINGLE: collect a single block of data and exit
·
BM_WINDOW: collect a series of overlapping blocks of data
·
BM_STREAM: collect a continuous stream of data
BM_SINGLE is useful when you wish to collect data at high speed for a short period: for example, to collect
1000 readings in 50 milliseconds. The maximum capture size in this mode is 1 million samples.
BM_WINDOW is useful when collecting several blocks of data at low speeds - for example when collecting
10,000 samples over 10 seconds. Collecting a sequence of single blocks like this would take 10 seconds for
each block, so displayed data would not be updated frequently. Using windowing, it is possible to ask for a
new block more frequently, for example every second, and to receive a block containing 9 seconds of repeat
data and 1 second of new data. The block is effectively a 10-second window that advances one second per
cycle.
BM_STREAM is useful when you need to collect data continuously for long periods. In principle, it could be
used to collect data indefinitely. Every time pl1000GetValues() is called, it returns the new readings
since the last time it was called. The noOfValues argument passed to pl1000Run() must be sufficient to
ensure that the buffer does not overflow between successive calls to pl1000GetValues(). For example, if
you call pl1000GetValues() every second and you are collecting 500 samples per second, noOfValues
must be at least 500, or preferably 1000, to allow for delays in the operating system.
3.2 Scaling
The PicoLog 1000 Series devices produce values in the range 0 to maxValue, where maxValue is the value
returned by pl1000MaxValue(). To convert ADC readings to volts, multiply by 2.5 and divide by
maxValue.
For example, maxValue for the PicoLog 1216 is 4095. Therefore, an ADC reading of 132 from this device
from a represents 132 x 2.5 / 4095 = approx. 0.0806 volts.
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved. pl1000pg r7
Page 10

Driver routines6
4 Driver routines
4.1 Summary
The driver routines in the PicoLog 1000 Series API are listed, with short descriptions, in the Table of
Contents at the start of this manual.
The driver allows you to do the following:
·
Identify and open the logger
·
Take a single reading from a particular channel
·
Collect a block of samples at fixed time intervals from one or more channels
·
Set up a trigger event for a particular channel
You can specify a sampling interval from 1 microsecond to 1 second. The shortest interval that the driver
will accept depends on the capture mode selected.
The normal calling sequence to collect a block of data is as follows:
Check that the driver version is correct
Open the driver
Set trigger mode (if required)
Set sampling mode (channels and time per sample)
While you want to take measurements,
Run
While not ready
Wait
End while
... Get a block of data ...
End While
Close the driver (this happens automatically when the application terminates)
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved.pl1000pg r7
Page 11

PicoLog 1000 Series Programmer's Guide 7
4.2 pl1000CloseUnit() - close the unit
PICO_STATUS pl1000CloseUnit
(
int16_t handle
)
This function closes the unit.
Arguments:
handle, device identifier returned by pl1000OpenUnit() or pl1000OpenUnitProgress()
Returns:
PICO_OK
PICO_HANDLE_INVALID
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved. pl1000pg r7
Page 12
Driver routines8
4.3 pl1000GetSingle() - get a single value from a specified channel
PICO_STATUS pl1000GetSingle
(
int16_t handle,
PL1000_INPUTS channel,
uint16_t * value
)
This function returns a single sample value from the specified input channel.
Arguments:
handle, device identifier returned by pl1000OpenUnit() or pl1000OpenUnitProgress()
channel, which channel to sample:
[PL1000_CHANNEL_1 to PL1000_CHANNEL_12] (PicoLog 1012)
[PL1000_CHANNEL_1 to PL1000_CHANNEL_16] (PicoLog 1216)
value, a location where the function will write the sample value
Returns:
PICO_OK
PICO_INVALID_HANDLE
PICO_NO_SAMPLES_AVAILABLE
PICO_DEVICE_SAMPLING
PICO_NULL_PARAMETER
PICO_INVALID_PARAMETER
PICO_DATA_NOT_AVAILABLE
PICO_INVALID_CALL
PICO_NOT_RESPONDING
PICO_MEMORY
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved.pl1000pg r7
Page 13

PicoLog 1000 Series Programmer's Guide 9
4.4 pl1000GetUnitInfo() - return information about the unit
PICO_STATUS pl1000GetUnitInfo
(
int16_t handle,
int8_t * string,
int16_t stringLength,
int16_t * requiredSize,
PICO_INFO info
)
This function returns a string containing the specified item of information about the unit.
If you want to find out the length of the string before allocating a buffer for it, call the function with string
= NULL first.
Arguments:
handle, device identifier returned by pl1000OpenUnit() or pl1000OpenUnitProgress()
string, a location where the function writes the requested information, or NULL if you are only interested
in the value of requiredSize
stringLength, the maximum number of characters that the function should write to string
requiredSize, a location where the function writes the length of the information string before it was
truncated to stringLength. If the string was not truncated, requiredSize will be less than or equal to
stringLength.
info, the information that the driver should return. These values are specified in PicoStatus.h:
PICO_DRIVER_VERSION
PICO_USB_VERSION
PICO_HARDWARE_VERSION
PICO_VARIANT_INFO
PICO_BATCH_AND_SERIAL
PICO_CAL_DATE
PICO_KERNEL_DRIVER_VERSION
PICO_FIRMWARE_VERSION_1
Returns:
PICO_OK
PICO_INVALID_HANDLE
PICO_NULL_PARAMETER
PICO_INVALID_INFO
PICO_INFO_UNAVAILABLE
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved. pl1000pg r7
Page 14

Driver routines10
4.5 pl1000GetValues() - get a number of sample values after a run
PICO_STATUS pl1000GetValues
(
int16_t handle,
uint16_t * values,
uint32_t * noOfValues,
uint16_t * overflow,
uint32_t * triggerIndex
)
This function is used to get values after calling pl1000Run().
Arguments:
handle, device identifier returned by pl1000OpenUnit() or pl1000OpenUnitProgress()
values, an array of sample values returned by the function. The size of this buffer must be the number of
enabled channels multiplied by the number of samples to be collected.
noOfValues, on entry, the number of sample values per channel that the function should collect. On exit,
the number of samples per channel that were actually written to the buffer.
overflow, on exit, a bit field indicating which, if any, input channels overflowed the input range of the
device. A bit set to 1 indicates an overflow. The least significant bit corresponds to channel 1. May be NULL
if an overflow warning is not required.
triggerIndex, on exit, a number indicating when the trigger event occurred. The number is a zero-based
index to the values array, or 0xffffffff if the information is not available. On entry, the pointer may be
NULL if a trigger index is not required.
Returns:
PICO_OK
PICO_INVALID_HANDLE
PICO_NO_SAMPLES_AVAILABLE
PICO_DEVICE_SAMPLING
PICO_NULL_PARAMETER
PICO_INVALID_PARAMETER
PICO_TOO_MANY_SAMPLES
PICO_DATA_NOT_AVAILABLE
PICO_INVALID_CALL
PICO_NOT_RESPONDING
PICO_MEMORY
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved.pl1000pg r7
Page 15

PicoLog 1000 Series Programmer's Guide 11
4.6 pl1000MaxValue() - return the maximum ADC value
PICO_STATUS pl1000MaxValue
(
int16_t handle,
uint16_t * maxValue
)
This function returns the maximum ADC value that the device will return. This value may be different on
different models in the PicoLog 1000 Series.
Arguments:
handle, device identifier returned by pl1000OpenUnit() or pl1000OpenUnitProgress()
maxValue, a location where the function will write the maximum ADC value
Returns:
PICO_OK
PICO_INVALID_HANDLE
PICO_NULL_PARAMETER
PICO_INVALID_PARAMETER
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved. pl1000pg r7
Page 16

Driver routines12
4.7 pl1000OpenUnit() - open and enumerate the unit
PICO_STATUS pl1000OpenUnit
(
int16_t * handle
)
This function opens and enumerates the unit.
Arguments:
handle, the function will write a value here that uniquely identifies the data logger that was opened. Use
this as the handle parameter when calling any other PicoLog 1000 Series API function.
Returns:
PICO_OK
PICO_OS_NOT_SUPPORTED
PICO_OPEN_OPERATION_IN_PROGRESS
PICO_EEPROM_CORRUPT
PICO_KERNEL_DRIVER_TOO_OLD
PICO_FW_FAIL
PICO_MAX_UNITS_OPENED
PICO_NOT_FOUND
PICO_NOT_RESPONDING
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved.pl1000pg r7
Page 17

PicoLog 1000 Series Programmer's Guide 13
4.8 pl1000OpenUnitAsync() - open the unit without waiting for completion
PICO_STATUS pl1000OpenUnitAsync
(
int16_t * status
)
This function opens a PicoLog 1000 Series data logger without waiting for the operation to finish. You can
find out when it has finished by periodically calling pl1000OpenUnitProgress() until that function
returns a non-zero value and a valid data logger handle.
The driver can support up to 64 data loggers.
Arguments:
status, a location where the function writes a status flag:
0: if there is already an open operation in progress
1: if the open operation is initiated
Returns:
PICO_OK
PICO_OPEN_OPERATION_IN_PROGRESS
PICO_OPERATION_FAILED
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved. pl1000pg r7
Page 18
Driver routines14
4.9 pl1000OpenUnitProgress() - report progress of pl1000OpenUnitAsync()
PICO_STATUS pl1000OpenUnitProgress
(
int16_t * handle,
int16_t * progress,
int16_t * complete
)
This function checks on the progress of pl1000OpenUnitAsync().
Arguments:
handle, a pointer to where the function should store the device identifier of the opened data logger, if the
operation was successful. Use this as the handle parameter when calling any other PicoLog 1000 Series
API function.
0: if no unit is found or the unit fails to open
<>0: handle of unit (valid only if function returns PICO_OK)
progress, a location where the function writes an estimate of the progress towards opening the data
logger. The value is between 0 and 100.
complete, a location where the function will write a non-zero value if the operation has completed
Returns:
PICO_OK
PICO_NULL_PARAMETER
PICO_OPERATION_FAILED
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved.pl1000pg r7
Page 19
PicoLog 1000 Series Programmer's Guide 15
4.10 pl1000PingUnit() - check that the unit is responding
PICO_STATUS pl1000PingUnit
(
int16_t handle
)
This function can be used to check that the already opened device is still connected to the USB port and
communication is successful.
Arguments:
handle, device identifier returned by pl1000OpenUnit() or pl1000OpenUnitProgress()
Returns:
PICO_OK
PICO_INVALID_HANDLE
PICO_DRIVE_FUNCTION
PICO_BUSY
PICO_NOT_RESPONDING
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved. pl1000pg r7
Page 20

Driver routines16
4.11 pl1000Ready() - indicate when pl1000Run() has captured data
PICO_STATUS pl1000Ready
(
int16_t handle,
int16_t * ready
)
This function indicates when pl1000Run() has captured the requested number of samples.
Arguments:
handle, device identifier returned by pl1000OpenUnit() or pl1000OpenUnitProgress()
ready, TRUE if ready, FALSE otherwise
Returns:
PICO_OK
PICO_INVALID_HANDLE
PICO_NOT_RESPONDING
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved.pl1000pg r7
Page 21

PicoLog 1000 Series Programmer's Guide 17
4.12 pl1000Run() - tell the unit to start capturing data
PICO_STATUS pl1000Run
(
int16_t handle,
uint32_t no_of_values,
BLOCK_METHOD method
)
This function tells the unit to start capturing data.
Arguments:
handle, device identifier returned by pl1000OpenUnit() or pl1000OpenUnitProgress()
no_of_values, the total number of samples to be collected per channel
method, which method to use to collect the data, from the following list:
BM_SINGLE
BM_WINDOW
BM_STREAM
See Capture modes for details.
Returns:
PICO_OK
PICO_INVALID_HANDLE
PICO_USER_CALLBACK
PICO_INVALID_CHANNEL
PICO_TOO_MANY_SAMPLES
PICO_INVALID_TIMEBASE
PICO_NOT_RESPONDING
PICO_CONFIG_FAIL
PICO_INVALID_PARAMETER
PICO_NOT_RESPONDING
PICO_TRIGGER_ERROR
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved. pl1000pg r7
Page 22

Driver routines18
4.13 pl1000SetDo() - control the digital outputs on the unit
PICO_STATUS pl1000SetDo
(
int16_t handle,
int16_t do_value,
int16_t doNo
)
This function controls the digital outputs DO0 to DO3 on the unit.
Arguments:
handle, device identifier returned by pl1000OpenUnit() or pl1000OpenUnitProgress()
do_value, whether to switch the output on or off:
1 - turns the digital output on
0 - turns the digital output off
doNo, which output to switch:
[PL1000_DO_CHANNEL_0 to PL1000_DO_CHANNEL_3]
Returns:
PICO_OK
PICO_INVALID_HANDLE
PICO_NOT_RESPONDING
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved.pl1000pg r7
Page 23

PicoLog 1000 Series Programmer's Guide 19
4.14 pl1000SetInterval() - set the sampling speed of the unit
PICO_STATUS pl1000SetInterval
(
int16_t handle,
uint32_t * us_for_block,
uint32_t ideal_no_of_samples,
int16_t * channels,
int16_t no_of_channels
)
This function sets the sampling rate of the unit.
Call this function with us_for_block set to the number of microseconds in which you wish to capture the
entire requested data set. The function will return the actual number of microseconds the operation will
take. You can then calculate the sampling interval i as follows:
in BM_SINGLE mode*:
i = 1 µs x us_for_block / (ideal_no_of_samples x no_of_channels)
in other modes:
i = 10 µs x us_for_block / (ideal_no_of_samples x no_of_channels)
* BM_SINGLE mode can achieve sampling intervals down to 1 µs when ideal_no_of_samples x
no_of_channels is no more than 8192. Under all other conditions, the fastest possible sampling interval
is 10 µs per channel and ideal_no_of_samples x no_of_channels may be anything up to 1000000.
Arguments:
handle, device identifier returned by pl1000OpenUnit() or pl1000OpenUnitProgress()
us_for_block, on entry: the target total time in which to collect (ideal_no_of_samples *
no_of_channels) samples, in microseconds; on exit: the time the driver will actually take to achieve this.
ideal_no_of_samples, the number of samples that you want to collect per channel. This number is
used only for timing calculations.
channels, an array of numbers identifying the channels from which you wish to capture:
[PL1000_CHANNEL_1 to PL1000_CHANNEL_12] (PicoLog 1012)
[PL1000_CHANNEL_1 to PL1000_CHANNEL_16] (PicoLog 1216)
Sampling of multiple channels is sequential.
no_of_channels, the number of channels in the channels array
Returns:
PICO_OK
PICO_INVALID_HANDLE
PICO_INVALID_CHANNEL
PICO_INVALID_TIMEBASE
PICO_NOT_RESPONDING
PICO_CONFIG_FAIL
PICO_INVALID_PARAMETER
PICO_NOT_RESPONDING
PICO_TRIGGER_ERROR
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved. pl1000pg r7
Page 24

Driver routines20
4.15 pl1000SetPulseWidth() - configure the PWM output
PICO_STATUS pl1000SetPulseWidth
(
int16_t handle,
uint16_t period,
uint8_t cycle
)
This function sets the pulse width of the PWM (pulse-width modulated) output.
Arguments:
handle, device identifier returned by pl1000OpenUnit() or pl1000OpenUnitProgress()
period, the required period of the PWM waveform in microseconds, from 100 to 1800
cycle, the required duty cycle as a percentage from 0 to 100
Returns:
PICO_OK
PICO_INVALID_HANDLE
PICO_SIG_GEN_PARAM
PICO_NOT_RESPONDING
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved.pl1000pg r7
Page 25

PicoLog 1000 Series Programmer's Guide 21
4.16 pl1000SetTrigger() - set the trigger on the unit
PICO_STATUS pl1000SetTrigger
(
int16_t handle,
uint16_t enabled,
uint16_t auto_trigger,
uint16_t auto_ms,
uint16_t channel,
uint16_t dir,
uint16_t threshold,
uint16_t hysteresis,
float delay
)
This function sets up the trigger, which controls when the unit starts capturing data.
Arguments:
handle, device identifier returned by pl1000OpenUnit() or pl1000OpenUnitProgress()
enabled, whether to enable or disable the trigger:
0: disable the trigger
1: enable the trigger
auto_trigger, whether to rearm the trigger automatically after each trigger event:
0: do not auto-trigger
1: auto-trigger
auto_ms, time in milliseconds after which the unit will auto-trigger if the trigger condition is not met
channel, which channel to trigger on:
[PL1000_CHANNEL_1 to PL1000_CHANNEL_12] (PicoLog 1012)
[PL1000_CHANNEL_1 to PL1000_CHANNEL_16] (PicoLog 1216)
dir, which edge to trigger on:
0: rising edge
1: falling edge
threshold, trigger threshold (the level at which the trigger will activate) in ADC counts
hysteresis, trigger hysteresis in ADC counts. This is the difference between the upper and lower
thresholds. The signal must then pass through both thresholds in the same direction in order to activate the
trigger, so that there are fewer unwanted trigger events caused by noise. The minimum value allowed is 1.
delay, delay between the trigger event and the start of the block as a percentage of the block size. 0%
means that the trigger event is the first data value in the block, and -50% means that the trigger event is in
the middle of the block.
Returns:
PICO_OK
PICO_INVALID_HANDLE
PICO_USER_CALLBACK
PICO_TRIGGER_ERROR
PICO_MEMORY_FAIL
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved. pl1000pg r7
Page 26

Driver routines22
4.17 pl1000Stop() - abort data collection
PICO_STATUS pl1000Stop
(
int16_t handle
)
This function aborts data collection. It is the normal method of terminating BM_WINDOW and BM_STREAM
data collection. You can also call it to terminate a BM_SINGLE data collection early, but this will invalidate
any data that has been captured.
Arguments:
handle, device identifier returned by pl1000OpenUnit() or pl1000OpenUnitProgress()
Returns:
PICO_OK
PICO_INVALID_HANDLE
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved.pl1000pg r7
Page 27

PicoLog 1000 Series Programmer's Guide 23
Code
(hex)
Enum
Description
00
PICO_OK
The Data Logger is functioning correctly
01
PICO_MAX_UNITS_OPENED
An attempt has been made to open more than 64 units
02
PICO_MEMORY_FAIL
Not enough memory could be allocated on the host
machine
03
PICO_NOT_FOUND
No PicoLog 1000 device could be found
04
PICO_FW_FAIL
Unable to download firmware
05
PICO_OPEN_OPERATION_IN_PROGRESS
A request to open a device is in progress
06
PICO_OPERATION_FAILED
The operation was unsuccessful
07
PICO_NOT_RESPONDING
The device is not responding to commands from the PC
08
PICO_CONFIG_FAIL
The configuration information in the device has become
corrupt or is missing
09
PICO_KERNEL_DRIVER_TOO_OLD
The picopp.sys file is too old to be used with the device
driver
0A
PICO_EEPROM_CORRUPT
The EEPROM has become corrupt, so the device will use a
default setting
0B
PICO_OS_NOT_SUPPORTED
The operating system on the PC is not supported by this
driver
0C
PICO_INVALID_HANDLE
There is no device with the handle value passed
0D
PICO_INVALID_PARAMETER
A parameter value is not valid
0E
PICO_INVALID_TIMEBASE
The timebase is not supported or is invalid
0F
PICO_INVALID_VOLTAGE_RANGE
The voltage range is not supported or is invalid
10
PICO_INVALID_CHANNEL
The channel number is not valid on this device or no
channels have been set
11
PICO_INVALID_TRIGGER_CHANNEL
The channel set for a trigger is not available on this device
12
PICO_INVALID_CONDITION_CHANNEL
The channel set for a condition is not available on this
device
13
PICO_NO_SIGNAL_GENERATOR
The device does not have a signal generator
14
PICO_STREAMING_FAILED
Streaming has failed to start or has stopped without user
request
15
PICO_BLOCK_MODE_FAILED
Block failed to start - a parameter may have been set
wrongly
16
PICO_NULL_PARAMETER
A parameter that was required is NULL
18
PICO_DATA_NOT_AVAILABLE
No data is available from a run block call
19
PICO_STRING_BUFFER_TOO_SMALL
The buffer passed for the information was too small
1A
PICO_ETS_NOT_SUPPORTED
ETS is not supported on this device
1B
PICO_AUTO_TRIGGER_TIME_TOO_SHORT
The auto trigger time is less than the time it will take to
collect the data
1C
PICO_BUFFER_STALL
The collection of data has stalled as unread data would be
overwritten
1D
PICO_TOO_MANY_SAMPLES
The number of samples requested is more than available in
the current memory segment
1E
PICO_TOO_MANY_SEGMENTS
Not possible to create number of segments requested
1F
PICO_PULSE_WIDTH_QUALIFIER
A null pointer has been passed in the trigger function or one
of the parameters is out of range
20
PICO_DELAY
One or more of the hold-off parameters are out of range
21
PICO_SOURCE_DETAILS
One or more of the source details are incorrect
4.18 PICO_STATUS values
Every function in the PicoLog 1000 Series API returns an error code from the following list of PICO_STATUS
values defined in PicoStatus.h:
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved. pl1000pg r7
Page 28
Driver routines24
22
PICO_CONDITIONS
One or more of the conditions are incorrect
24
PICO_DEVICE_SAMPLING
An attempt is being made to get stored data while
streaming. Stop streaming by calling pl1000Stop().
25
PICO_NO_SAMPLES_AVAILABLE
...because a run has not been completed
26
PICO_SEGMENT_OUT_OF_RANGE
The memory index is out of range
27
PICO_BUSY
Data cannot be returned yet
28
PICO_STARTINDEX_INVALID
The start time to get stored data is out of range
29
PICO_INVALID_INFO
The information number requested is not a valid number
2A
PICO_INFO_UNAVAILABLE
The handle is invalid so no information is available about
the device. Only PICO_DRIVER_VERSION is available.
2B
PICO_INVALID_SAMPLE_INTERVAL
The sample interval selected for streaming is out of range
2C
PICO_TRIGGER_ERROR
Not used
2D
PICO_MEMORY
Driver cannot allocate memory
36
PICO_DELAY_NULL
NULL pointer passed as delay parameter
37
PICO_INVALID_BUFFER
The buffers for overview data have not been set while
streaming
3A
PICO_CANCELLED
A block collection has been canceled
3B
PICO_SEGMENT_NOT_USED
The segment index is not currently being used
3F
PICO_NOT_USED
The function is not available
41
PICO_INVALID_STATE
Device is in an invalid state
43
PICO_DRIVE_FUNCTION
You called a driver function while another driver function
was still being processed
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved.pl1000pg r7
Page 29

PicoLog 1000 Series Programmer's Guide 25
5 Glossary
ADC. Analog to Digital Converter. An ADC samples analog signals and converts them to digital data for
storage and processing. It is an essential component of a data logger.
DLL. Dynamic Link Library. A file containing a collection of Windows functions designed to perform a
specific class of operations. A DLL is supplied with the PicoLog Data Loggers to enable you to control the
devices from your own programs.
Driver. A small program that acts as an interface, generally between a hardware component and a computer
program. The PicoLog Data Loggers require a USB driver that runs in the Windows kernel, and a second
driver in the form of a DLL that communicates with your application.
Maximum sampling rate. A figure indicating the maximum number of samples the ADC is capable of
acquiring per second. Maximum sample rates are usually given in S/s (samples per second). The higher the
sampling rate of the ADC, the more accurately it can represent the high-frequency details in a signal.
Streaming. An operating mode in which the ADC samples data and returns it to the computer in an unbroken
stream.
USB. Universal Serial Bus. This is a standard port that enables you to connect external devices to PCs. A fullspeed USB 2.0 port operates at up to 480 megabits per second. The PicoLog 1000 Series is also compatible
with any USB port from USB 1.1 upwards.
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved. pl1000pg r7
Page 30

Page 31

PicoLog 1000 Series Programmer's Guide 27
Index
6
64-bit Windows 3
A
ADC value, maximum 11
ADC-11 compatibility 3
Asynchronous operation 5
B
BM_SINGLE mode 5
BM_STREAM mode 5
BM_WINDOW mode 5
C
Capture modes
BM_SINGLE 5
BM_STREAM 5
BM_WINDOW 5
Closing a unit 7
Connecting to the PC 3
D
Data, reading 8, 10
Digital outputs, setting 18
DLLs 3
Driver routines
pl1000CloseUnit 7
pl1000GetSingle 8
pl1000GetUnitInfo 9
pl1000GetValues 10
pl1000MaxValue 11
pl1000OpenUnit 12
pl1000OpenUnitAsync 13
pl1000OpenUnitProgress 14
pl1000Ready 16
pl1000Run 17
pl1000SetDo 18
pl1000SetInterval 19
pl1000SetPulseWidth 20
pl1000SetTrigger 21
pl1000Stop 22
summary 6
G
Glossary 25
I
Information on unit, obtaining 9
Installation 3
L
Legal information 2
M
Maximum ADC value 11
N
New Hardware Wizard 3
O
Opening a unit 12, 13, 14, 16
Overview 1
P
PicoLog 1000 Series SDK 3
Programming 3
Pulse width, setting 20
PWM output, setting up 20
R
Running a unit 17
S
Sampling interval, setting 19
Scaling 5
SDK 3
Software license conditions 2
Stopping a unit 22
Streaming 5
T
Trademarks 2
Trigger, setting 21
U
Unit information, obtaining 9
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved. pl1000pg r7
Page 32

USB ADC-11 compatibility 3
W
WoW64 3
Index28
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved.pl1000pg r7
Page 33

US regional office:UK headquarters:
Asia-Pacific regional office:
Pico Technology
James House
Colmworth Business Park
St. Neots
Cambridgeshire
PE19 8YP
United Kingdom
Tel: +44 (0) 1480 396 395
Fax: +44 (0) 1480 396 296
sales@picotech.com
support@picotech.com
pl1000pg r7 2018-03-01
Copyright © 2013–2018 Pico Technology Ltd. All rights reserved.
Pico Technology
320 N Glenwood Blvd
Tyler
Texas 75702
United States
Tel: +1 800 591 2796
Fax: +1 620 272 0981
www.picotech.com
Pico Technology
Room 2252, 22/F, Centro
568 Hengfeng Road
Zhabei District
Shanghai 200070
PR China
Tel: +86 21 2226-5152
pico.china@picotech.com
 Loading...
Loading...