


A product of a PHYTEC Technology Holding company
phyFLEX®-i.MX 6
Quickstart Instructions
Document No.: L-781e_7
Release No.: SO-525v9
Edition: September 2015

phyFLEX®-i.MX 6
PHYTEC Messtechnik GmbH 2015 L-781e_7
Copyrighted products are not explicitly indicated in this manual. The absence of the trademark (, or ®)
and copyright (©) symbols does not imply that a product is not protected. Additionally, registered patents
and trademarks are similarly not expressly indicated in this manual.
The information in this document has been carefully checked and is considered to be entirely reliable.
However, PHYTEC Messtechnik GmbH assumes no responsibility for any inaccuracies. PHYTEC Messtechnik
GmbH neither gives any guarantee nor accepts any liability whatsoever for consequential damages
resulting from the use of this manual or its associated product. PHYTEC Messtechnik GmbH reserves the
right to alter the information contained herein without prior notification and accepts no responsibility for
any damages that might result.
Additionally, PHYTEC Messtechnik GmbH offers no guarantee nor accepts any liability for damages arising
from the improper usage or improper installation of the hardware or software. PHYTEC Messtechnik GmbH
further reserves the right to alter the layout and/or design of the hardware without prior notification and
accepts no liability for doing so.
Copyright 2015 PHYTEC Messtechnik GmbH, D-55129 Mainz.
Rights - including those of translation, reprint, broadcast, photomechanical or similar reproduction and
storage or processing in computer systems, in whole or in part - are reserved. No reproduction may occur
without the express written consent from PHYTEC Messtechnik GmbH.
EUROPE NORTH AMERICA FRANCE
Address: PHYTEC Messtechnik GmbH
Robert-Koch-Str. 39
D-55129 Mainz
GERMANY
PHYTEC America LLC
203 Parfitt Way SW
Bainbridge Island, WA 98110
USA
PHYTEC France
17, place Saint-Etienne
F-72140 Sillé-le-Guillaume
FRANCE
Sales:
+49 6131 9221-32
sales@phytec.de
+1 8
00 278-9913
sales@phytec.com
+33 2 43 29 22 33
info@phytec.fr
Technical
Support:
+49 6131 9221-31
support@phytec.de
+1 2
06 780-9047
support@phytec.com
support@phytec.fr
Fax: +49 6131 9221-33 +1 206 780-9135 +33 2 43 29 22 34
Web Site:
http://www.phytec.de
http://www.phytec.eu
http://www.phytec.com http://www.phytec.fr
INDIA CHINA
Address: PHYTEC Embedded Pvt. Ltd.
#16/9C, 3rd Main, 3rd Floor, 8th Block,
Opp. Police Station Koramangala,
Bangalore-560095
INDIA
PHYTEC Information Technology (Shenzhen) Co. Ltd.
Suite 2611, Floor 26, Anlian Plaza,
4018 Jin Tian Road
Futian District, Shenzhen
CHINA 518026
Sales:
+91-80-4086 7046/48
sales@phytec.in
+86-755-3
395-5875
sales@phytec.cn
Technical
Support:
+91-80-4086 7047
support@phytec.in
support@phytec.cn
Fax: +86-755-3395-5999
Web Site: http://www.phytec.in http://www.phytec.cn
7th Edition September 2015

Contents
.................................................................69
PHYTEC Messtechnik GmbH 2015 L-781e_7 i
Conventions, Abbreviations and Acronyms ....................................................................iii
1 ...................................................................................................... 1 Introduction
1.1
............................................................. 1 Rapid Development Kit Documentation
1.2
........................................................... 1 Professional Support Packages Available
1.3
.......................................................... 2 Overview of these QuickStart Instructions
1.4
.................................................................................... 2 System Requirements
1.5
........................................... 2 Software used in the virtual machine hard disk image
1.5.1
............................................................................................ 2 Ubuntu
1.5.2
............................................................................................. 3 Eclipse
1.5.3
........................................................................................ 3 Qt Creator
1.5.4
.................................................................................... 3 Yocto Project
2
................................................................................................... 4 Getting Started
2.1
........................................................ 4 Preparing and Starting the virtual machine
2.2
................................................................................... 5 Starting the Hardware
3
......................................................................................... 10 Working with Eclipse
3.1
.............................................................10 Programming in the C/C++ Perspective
3.1.1
................................................................10 Work with the Demo Project
3.1.2
.......................................................................15 Creating a New Project
3.1.3
..........................................................22 Modifying the Demo Application
3.1.4
.......................................25 Starting a Program out of Eclipse on the Target
3.2
.......................................................................27 Debugging an Example Project
3.2.1
...................................................28 Starting the GDB Server on the Target
3.2.2
....................................28 Configuring and Starting the Debugger in Eclipse
3.2.3
.........................................................................33 Setting a Breakpoint
3.2.4
..................................34 Stepping through and Watching Variable Contents
3.2.5
..................................36 Stepping through and Changing Variable Contents
3.2.6
..................................................................37 Using the Memory Monitor
4
..................................................................................... 40 Working with Qt Creator
4.1
..........................................................40 Stop the Running Qt Demo on the Target
4.2
.....................................................................40 Importing the Demo Application
4.3
.....................................................................42 Work with the Demo Application
4.4
..........................................45 Compile and Run the Demo Application on the Target
4.5
............................................48 Compile and Run the Demo Application on the Host
4.6
....................................................................49 Debugging the Demo Application
4.6.1
........................................49 Using QDebug for simple Debugging Messages
4.6.2
.............................................51 Using the integrated Qt Creator Debugger
5
........................................................................................... 55 Working with Yocto
5.1
.........................................................55 Add new packages to the Root Filesystem
5.2
.............................................59 Writing the Root Filesystem into the Target’s Flash
6
............................................................................ 62 Setup your own Linux-Host-PC
6.1
........................................................................................62 Essential Settings
6.1.1
.............................................................................62 Installing Ubuntu
6.1.2
........................................................64 Installation of Software Packages
6.1.3
....................................................................65 Set the Git Configuration
6.1.4
...............................65 Build the Board Support Package and Install the SDK
6.1.5
....................................................67 Set up Eclipse and Integrate Plug-ins
6.1.6 Install and Setup Qt Creator

phyFLEX®-i.MX 6
ii
PHYTEC Messtechnik GmbH 2015 L-781e_7
6.1.7 ..................................................................... 75 Setting up a TFTP server
6.1.8
............................................................................. 76 Optional Settings

Conventions, Abbreviations and Acronyms
Conventions, Abbreviations and Acronyms
The following is a list of the typographical conventions used in this book:
Conventions
The conventions used in this manual are as follows:
Signals that are preceded by an "n", "/", or “#”character (e.g.: nRD, /RD, or #RD), or
that have a dash on top of the signal name (e.g.: RD) are designated as active low
signals. That is, their active state is when they are driven low, or are driving low.
A "0" indicates a logic zero or low-level signal, while a "1" represents a
logic one or
high-level signal.
The hex-numbers given for addresses of I
2
C devices always represent the 7 MSB of the
address byte. The correct value of the LSB which depends on the desired command
(read (1), or write (0)) must be added to get the complete address byte. E.g. given
address in this manual 0x41 => complete address byte = 0x83 to read from the device
and 0x82 to write to the device.
Tables which describe jumper settings show the default position in bold, blue text.
Text in blue italic indicates a hyperlink within, or external to the document. Click these
links to quickly jump to the applicable URL, part, chapter, table, or figure.
Text in bold italic indicates an interaction by the user, which is defined on the screen.
Text in
Consolasindicates an input by the user, without a premade text or button to
click on.
Text in italic indicates proper names of development tools and corresponding controls
(windows, tabs, commands etc.) used within the development tool, no interaction
takes place.
White Text on black background shows the result of any user interaction (command,
program execution, etc.)
PHYTEC Messtechnik GmbH 2015 L-781e_7 iii

phyFLEX®-i.MX 6
At this icon you might leave the path of this Application Guide.
This is a warning. It helps you to avoid annoying problems.
You can find useful supplementary information about the topic.
At the beginning of each chapter you can find information about the time
required to read the following chapter.
Y
ou have successfully completed an important part of this Application
Guide.
You can find information to solve problems.
iv
PHYTEC Messtechnik GmbH 2015 L-781e_7

Introduction
PHYTEC Messtechnik GmbH 2015 L-781e_7 1
1 Introduction
In this QuickStart Instructions Manual you will find general information about the PHYTEC
phyFLEX-i.MX6-Kit and instructions how to start-up with the phyFLEX-i.MX6. You will learn
how to...
… use the prepared virtual machine hard disk image.
... connect to the target.
... handle with the Yocto Project and our Board Support Package to build your own images.
... working with Eclipse and Qt Creator .
... setup your own linux host system.
This first Chapter gives a short introduction about the PHYTEC phyFLEX-i.MX6-Kit and it's
Quickstart. Also you will find general requirements and information to successfully pass the
Quickstart.
1.1 Rapid Development Kit Documentation
This
Rapid Development Kit
(RDK) includes the following electronic documentation in the
virtual machine hard disk under /opt/PHYTEC_Tools/Documentation.
The PHYTEC phyFLEX-i.MX6 Hardware Manual
Hardware schematics
The Yocto Reference Manual
The BSP Quickstart
Image Processing manuals
These Quickstart Instructions
1.2 Professional Support Packages Available
If you have any questions concerning installation and setup, you are welcome to contact
our support department.
For more in-depth questions, we offer a variety of custom-tailored packages with different
support options (e-mail, phone, direct contact to the developer) and different reaction
times.
Please contact our sales team to discuss the appropriate support option if professional
support beyond installation and setup is important for you. For more information please
refer to the following sources:
http://www.phytec.de
http://www.phytec.eu
support@phytec.de
Also more contact information can be foun
d on page 2.

phyFLEX®-i.MX 6
2
PHYTEC Messtechnik GmbH 2015 L-781e_7
1.3 Overview of these QuickStart Instructions
This QuickStart gives you an overview of the phyFLEX-i.MX6. It's content ranges from the
first startup, to building your own kernel and file system, to the point of building your own
program with
Eclipse
and
Qt Creator
. This Quickstart is structured as follows:
The Getting Started section describes the basics such as configure your host platform
and starting the phyFLEX-i.MX6 platform.
The Working with Eclipse explains how to modify an example application, create, build,
debug a new project, and copy programs to the phyFLEX-i.MX6 using Eclipse with the
C/C++ CDT plugin.
The Working with Qt Creator section explains how to modify an example application,
create, build, debug a new project, and copy programs to the phyFLEX-i.MX6 using Qt
Creator.
The
Working with Yocto
section explains how to add new packages in our Board Support
Package, build a new root filesystem and copy the root filesystem into the target’s flash.
The Setup your own Linux-Host-PC section explains how to setup your own Linux-Host-PC
if you don’t want to use our virtual machine hard disk image.
1.4 System Requirements
The following items will be needed to complete this Quickstart successfully:
The PHYTEC phyFLEX-i.MX6
The PHYTEC Development Board with the included DB-9 serial cable, Ethernet crossover
cable and AC adapter supplying 12 VDC (min. 2 A)
The PHYTEC virtual machine hard disk image (
SO-525v9
).
An IBM-compatible host-PC (586 or higher) with 512 MB RAM (or more)
1.5 Software used in the virtual machine hard disk image
1.5.1 Ubuntu
Ubuntu - which is used as operating system for our virtual machine - is a free and open
source operating system based on Debian Linux. Basically it is designed for desktop use.
Web statistics suggest that Ubuntu is one of the most popular operating systems in the
Linux desktop environment.
The Ubuntu release which we deliver is 14.04.3 and was released on 06. August 2015.
Ubuntu 14.04 code name "Trusty Tahr" is designated as a Long Term Support (LTS) release
and the first stable release was on 17. April 2014. LTS means that it will be supported and
updated for five years.

Introduction
PHYTEC Messtechnik GmbH 2015 L-781e_7 3
Our Ubuntu version comes with Unity as desktop environment, dpkg as package
management system, the update method is based on APT (Advanced Packaging Tool) and
the user space uses GNU.
1.5.2 Eclipse
The Eclipse platform provides support for C/C++. Because the Eclipse platform is only a
framework for developer tools, it does not support C/C++ directly, instead it uses external
plug-ins. This Application Guide shows you how to make use of the CDT plug-in.
The CDT is an open source project (licensed under the Common Public License)
implemented purely in Java as a set of plug-ins for the Eclipse SDK platform. These plug-ins
add a C/C++ perspective to the Eclipse Workbench that can now support C/C++ development
with a number of views and wizards, along with advanced editing and debugging support.
1.5.3 Qt Creator
Qt Creator is a cross-platform development environment for the Qt framework. Included are
a code editor and a Qt Designer to build graphical user interfaces (GUI). It uses the GNU
C/C++ compiler.
1.5.4 Yocto Project
The Yocto Project is an open source collaboration to create custom Linux-based systems for
embedded products regardless of the hardware architecture. We use the Yocto Project to
create the Board Support Package (BSP) for our hardware.

phyFLEX®-i.MX 6
2 Getting Started
2.1 Preparing and Starting the virtual machine
To ensure successful introduction to the development with the phyFLEXi.MX6 we strongly recommend continuing with the prepared virtual
machine hard disk image
Nonetheless, if you want to use your already existing environment we
explain how to modify your system to get the same experience as with our
virtual machine in section 6.
To follow this QuickStart you need our phyFLEX-i.MX6
virtual machine hard disk image. The
hard disk image includes all software installations and configurations (e.g. pre-built Yocto
BSP, Eclipse, Qt Creator) necessary for a successful start-up of the phyFLEX-i.MX6. You can
freely download the compressed virtual machine hard disk image from our website, if you
did not purchase an USB flash drive with our image. The compressed image (SO525v9.tar.xz) has a size of approx. 15 GB and includes a virtual machine disk file (.vmdk)
which is suitable for most virtualization software, and which can be mounted to an
appropriate Linux machine (tested with VMware Player and VirtualBox).
1. Plug-in the purchased USB flash drive or download the compressed VM hard disk
image from http://www.phytec.de/de/support/faq/faq-phyflex-imx6 .
2. Unpack the compressed file with an appropriate tool to get the i
ncluded .vmdk file.
3. Follow the instructions of your virtualization software to create a new virtual
machine. However, pay regard to the following settings required to obtain a
correctly working virtual machine:
- choose Linux-Ubuntu 64-bit version as operating system
- use the unpacked file SO-525v9.vmdk as hard disk
- an Ethernet adapter, as well as a serial interface, or the USB controller must be
available to connect to the phyFLEX-i.MX6
In order to avoid any conflicts we recommend to have only the Ethernet
adapter in the virtual machine which will be used for the peer to-peer
connection between your PC and the phyFLEX-i.MX6.
4
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
4. Start the virtual machine with our hard disk image.
You will see the modified Ubuntu desktop :
PHYTEC Messtechnik GmbH 2015 L-781e_7 5
reated login data is:
sername: „phyvm“ — passwo
rd: „phytec“.
For further use of the virtual machine the pre-c
u
Now you are ready to connect your PC with the phyFLEX-i.MX6.
2.2 Starting the Hardware
am Microcom as well as via a SSH session using a peer-to-peer
etwork connection.
In this section you will learn how to connect your host PC to the target. The connection will
be done using a cross-over Ethernet cable and a serial one-to-one cabl
e. You will start
Linux from the flash memory on the target and you will be able to log in with the serial
communication progr
n

phyFLEX®-i.MX 6
By default every input and output is transmitted over the serial
connection.
Connect the serial cable to the UART0 RS232 port on the target and the first serial
interface on your host.
Be sure to use the one-to-one serial cable included in this Rapid
Development Kit.
Connect the cross-over Ethernet cable to the Ethernet connector on the target and to
the appropriate network card of your host, which is passed on the virtual machine.
Clic
k the Microcom_ttyS0 icon on your desktop, if you have connected the target to your
serial interface on your host. If you have connected the serial cable with an USB dongle
to your PC click the Microcom_ttyUSB0 icon on your desktop.
Connect the AC adapter to the power supply connector X12 (12V) on your board.
After connecting the board to the power supply, the target starts booting. When the target
has finished loading the system, you should see a screen similar to the following:
6
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
Enter root as the login name and press
Enter
.
As a good example (and helpful for understanding the next step) enter
ifconfig .
.
You will get information about the configuration of the Ethernet interface on the phyFLEXi.MX6
PHYTEC Messtechnik GmbH 2015 L-781e_7 7

phyFLEX®-i.MX 6
When the target is connected to the power supply, the boot loader Barebox
is first loaded from the flash memory. Then the boot loader is
uncompressing and booting the Linux kernel from the flash. Then the
kernel will install the root file system, which is also located in the target's
flash.
If you don’t see any output in the Microcom window, check the serial
connection between the target and your host. If you have more than one
serial port try the others. By default Microcom uses /dev/ttyS0. If you want
to use another port you can click on the Microcom Icon at your desktop
with your right mouse button and select Properties. A window opens in
which you can change the Properties of theMicrocom Icon. Click in the
Command field and search for "-p /dev/ttyS0". Change it for example to
/dev/ttyS1 and so on if you have more than one serial port. If you are
connecting the board via RS232 to USB change it to /dev/ttyUSB0. The -p
Parameter defines the port which Microcom will use.
If the Microcom window does not open, one reason could be a lock-file
which was created when Microcom was not correctly terminated. Delete
this file by opening a terminal and type: sudo rm /var/lock/LCK..*
In the virtual machine hard disk image the Ethernet adapter eth0 is preconfigured to the IP
address 192.168.3.10 and netmask 255.255.255.0 to establish the peer-to-peer
connection to the phyFLEX-i.MX6.
You are ready to test the Ethernet network connection.
Click on the SSH for Target icon on your de
sktop.
A console window will open and you will see an authentication question.
Type
yes and press Enter.
8
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
If the connection is working you will see following output in the SSH connection:
If you don’
t see the user login, check the Ethernet connection between the
target and the host. If you have installed more than one network card on
your host, be sure to connect the cable to the network card which you have
configured with the IP address 192.168.3.10.
If you do not see the login, you may not have set up the right IP address for
your host. Open the
System Settings
, click on the
Network
icon and check
the settings for the physical interface to which you have connected the
Ethernet cable.
PHYTEC Messtechnik GmbH 2015 L-781e_7 9
You have successfully set up all configurations to access your phyFLEXi.MX6 from your host.

phyFLEX®-i.MX 6
3 Working with Eclipse
Now we start developing our own applications with the help of Eclipse.
3.1 Programming in the C/C++ Perspective
We are starting with the C/C++ workbench. Therefore you will import an existing Eclipse
project into your workspace. The imported example project will be compiled with the cross
compiler. After that, you will copy and execute the newly created program on the target.
3.1.1 Work with the Demo Project
Clic
k the Eclipse icon to start the application. You can find this icon on your desktop.
Change the workspace directory to
/opt/prj_workspace/Eclipse if necessary and
confirm with OK.
10
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
Now you can see the Eclipse wor
kbench
First we will import an existing project.
Select File ► Import from the menu bar.
Select Exis
ting Projects into Workspace and click Next.
PHYTEC Messtechnik GmbH 2015 L-781e_7 11

phyFLEX®-i.MX 6
Select Browse.
Double-click the HelloWorld directory under /opt/prj_workspace/Eclipse/.
Clic
k OK.
12
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
Select Fini
sh to import the project.
Select Project ► Build Project from the menu bar.
The HelloWorld program will be compiled and the HelloWorld executable is built for the
target. The
n the HelloWorld file is copied to the target using secure copy. After the file has
been copied to the target, the program is executed on the target using SSH.
PHYTEC Messtechnik GmbH 2015 L-781e_7 13

phyFLEX®-i.MX 6
You will see the following content in the Console
window:
If you do not get this result verify that you have the target connected to
your host, and that the network has been configured as explained in this
Quickstart.
You have successfully passed the first steps with the Eclipse IDE. You are
now able to import existing projects into the Eclipse workspace. You can
compile an existing project and execute the program on the target.
14
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
3.1.2 Creating a New Project
In this section you will learn how to create a new project with Eclipse and how to configure
the project for use with the GNU C/C++ cross development toolchain.
Open Eclipse if it is not already opened.
Select File ► New ► Project from the menu bar.
A new dialog opens.
Select C Project and click Next.
PHYTEC Messtechnik GmbH 2015 L-781e_7 15

phyFLEX®-i.MX 6
Enter the project name
myHelloWorld and click Next.
Clic
k Finish.
16
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
You will see the C/C++ IDE with the myHelloWorld project.
If the HelloWorld Project is not expanded double-click the HelloWorld project which we
have worked with previously.
Right-click on HelloWorld.c in the HelloWorld project.
Select Copy.
Select the myHelloWorld projec
t.
Right-click the myHelloWorld project.
Select Paste.
Double-click on HelloWorld.c in the myHelloWorld project.
If Build Automatically from the Project menu is selected, the HelloWorld application will now
be compiled and created with the standard GCC C/C++ compiler suitable for your host
machine. You will find the executable file, which can only run on your host system, in the
workspace/myHelloWorld/Debug directory.
To compile your project for phyFLEX-i.MX6 instead, you will have to use the GNU C/C++
cross compiler.
Right-click the myHelloWorld project and choose Properties.
The Properties dialog appears.
Select C/C++ Build ► Settings.
Select GCC C Compiler.
PHYTEC Messtechnik GmbH 2015 L-781e_7 17

phyFLEX®-i.MX 6
Enter
${CC} into the Command input field.
Select GCC C Linker.
Enter
${CC} into the Command input field and add ${LDFLAGS} in the Command line
pattern after ${COMMAND}.
18
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
Select GCC Assembler.
Change the Command input field to
${AS}.
Click Apply.
Select the Build Steps tab.
PHYTEC Messtechnik GmbH 2015 L-781e_7 19

phyFLEX®-i.MX 6
Enter the following command in the Post-build steps Command input field:
scp./myHelloWorldroot@192.168.3.11:/home/root/.,ssh
root@192.168.3.11./home/root/myHelloWorld
Be sure to enter the semicolon before the ssh command.
Ensure that the file myHelloWorld on the target will have execution rights,
because otherwise ssh will fail.
Click Apply.
Click OK.
Select Project ► Clean from the menu bar.
20
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
Confirm with OK.
The project will be rebuilt.
Select the Console tab.
If no errors occur while building the project, you will see the following output:
You have successfully created your first own project with the Eclipse IDE.
You have configured the project to create an application for your target
platform.
PHYTEC Messtechnik GmbH 2015 L-781e_7 21

phyFLEX®-i.MX 6
22
PHYTEC Messtechnik GmbH 2015 L-781e_7
3.1.3 Modifying the Demo Application
Now we will extend the myHelloWorld application. The extended myHelloWorld application
will write an output to the first serial interface as well as to the standard output.
Open Eclipse if it is not opened yet.
Double-click HelloWorld.c in the myHelloWorld project.
First include the following two additional header files:
#include<unistd.h>
#include<fcntl.h>
Then add the function write_tty(), which writes n bytes to the first serial interface
(which, on the phyFLEX-i.MX6, is connected to the system console /dev/console):
voidwrite_tty(char*buffer,intcount)
{
intout,
out=open("/dev/console",O_RDWR),
write(out,buffer,count),
close(out),
}
Enter the following two lines in the main() function to declare the buffer and call the
write_tty() function:
charbuf[]={"WelcometotheWorldofPHYTEC!(serial)\n"},
write_tty(buf,sizeof(buf)‐1),
In the next screenshot you can see the complete program.

Quickstart Instructions
Save your program after changing the code.
The applic
ation will be compiled, built, copied to the target and executed.
Click the Microcom icon on the desktop.
PHYTEC Messtechnik GmbH 2015 L-781e_7 23

phyFLEX®-i.MX 6
If you are not logged in, enter
root and press Enter.
Type .
/myHelloWorld to start the application.
You will see the following output:
.Welcome to the World of PHYTEC! (serial).
.Welcome to the World of PHYTEC!.......... .
Close Microcom.
When you start the application via an SSH session, you only see one output line. When you
execute the program with Microcom, you see two output lines.
The first line is a direct output on the serial interface. You can not see this
line in an SSH session, because you are connected over a TCP/IP
connection to the target. With Microcom, however, you have direct access
to the serial interface, so you can also see the line that is written to the
serial console.
In this section you have changed an existing application. You also learned
how to access the serial interface. First you called the function open() on
the device /dev/console. The return value of this function was a file
descriptor. With the file descriptor you called the function write() to send
n bytes to the device /dev/console. After that, the file descriptor was
closed with the function close().
This procedure is quite typical for Linux, because Linux treats everything
as a file.
24
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
3.1.4 Starting a Program out of Eclipse on the Target
In the following you will find another method to start an application out of Eclipse.
After compiling a project in Eclipse, the program is copied to the target and directly
executed. A program can also be executed on the target without compiling a project. In the
following section you will learn how to start a program on the target as an external tool.
Select Run ► External Tools ► External Tools Configurations from the menu bar.
Double-Click Program a new program configuration will be opened.
PHYTEC Messtechnik GmbH 2015 L-781e_7 25

phyFLEX®-i.MX 6
In the Name input field, enter:
myHelloWorldTarget.
Enter
/usr/bin/ssh in the Location input field.
Enter
root@192.168.3.11./myHelloWorld into the Arguments field.
26
PHYTEC Messtechnik GmbH 2015 L-781e_7
Select App
ly.

Quickstart Instructions
Select Run.
Now the program is executed on the target and you will see the output .Welcome to the
World of PHYTEC! (serial) in the Microcom window.
If you want to execute the program the next time, you can use the Run External Programs
button from the menu bar.
You have successfully created your own Eclipse project and you learned
how to execute a program on the target.
3.2 Debugging an Example Project
In this chapter you will learn using the GNU debugger GDB on the host for remote debug-
irst you will start the GDB server on the target. Then you will configure the Eclipse
he CDT extends the standard Eclipse Debug view with functions for debugging
he GDB client is running on the host and is used to control the GDB server on the target,
ging in conjunction with the GDB server on the target. GDB is the symbolic debugger of the
GNU project and is arguably the most important debugging tool for any Linux system.
F
platform and start the GNU debugger out of Eclipse using the Debug view.
T
C/C++ code. The Debug view allows you to manage the debugging and running of a program
in the workbench. Using the Debug view you will be able to set breakpoints/watchpoints in
the code and trace variables and registers. The Debug view displays the stack frame for the
threads of each target you are debugging. Each thread in your program appears as a node
in the tree, and the Debug view displays the process for each target you are running.
T
which in turn controls the application running on the target. GDB client and GDB server can
communicate over a TCP/IP network connection as well as via a serial interface. In this
Application Guide we will only describe debugging via TCP/IP.
PHYTEC Messtechnik GmbH 2015 L-781e_7 27

phyFLEX®-i.MX 6
3.2.1 Starting the GDB Server on the Target
In this passage you will learn how to start the GDB server on the target. The GDB server will
be used to start and control the myHelloWorld program.
To debug a program with GDB, the program needs extended debugging symbols. These
have already been added while building the program.
Open Microcom.
Type
rootand press Enter.
Start the GDB server:
gdbserver192.168.3.11:10000myHelloWorld
You have started the GDB server on the target. The GDB server is now waiting for
connections on TCP port 10000.
3.2.2 Configuring and Starting the Debugger in Eclipse
In this passage you will learn ho
w to configure your project settings to use Eclipse with the
GNU debugger. After the configuration of your project settings, the GNU debugger will start
and connect to the GDB server on the target.
Start Eclipse if the application is not started yet.
Right-click on the myHelloWorld project in the Navigator window.
Select Debug As ► Debug Configurations.
A dialog to create, manage and run applications appears.
28
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
Select myHelloWorld under C/C++ Application (to expand it double click on it).
Select the Debugger tab.
PHYTEC Messtechnik GmbH 2015 L-781e_7 29

phyFLEX®-i.MX 6
Select gdbserver Debugger from the Debugger drop-down box.
Enter
${GDB} in the GDB Debugger field
Keep the GDB command file field empty.
30
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
Select the Connection tab and select TCP in the drop-down box.
Enter
192.168.3.11 (the target's IP address) in the Host name input field.
The host's GDB will connect to this IP address to communicate with the target's GDB server.
Click Apply.
Click Debug.
A new dialog appears.
•Select Yes to switch to the Debug perspective.
PHYTEC Messtechnik GmbH 2015 L-781e_7 31

phyFLEX®-i.MX 6
The debug perspective opens and the debugger stops automatically at the first line. The
host's GDB is now connected to the GDB server on the target.
You have configured your project for re
mote debugging. You have started the GNU
debugger in Eclipse and connected the host's GDB with the target's GDB server. You can
now start to debug the project.
32
PHYTEC Messtechnik GmbH 2015 L-781e_7
Quickstart Instructions
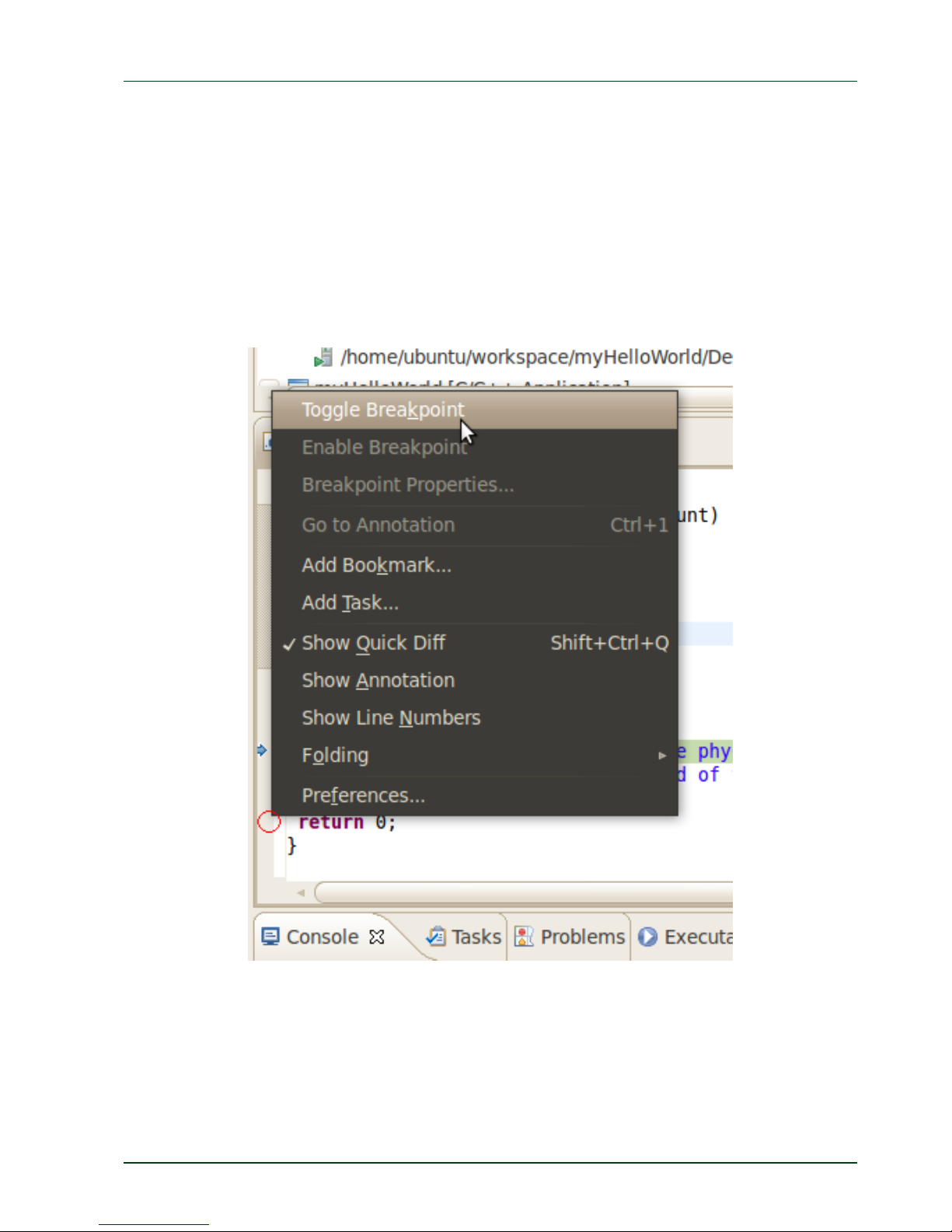
3.2.3 Setting a Breakpoint
Now you will set a breakpoint in your program. The breakpoint will be set on the last line of
the function main(). If you resume the application, the debugger will stop at this line.
Select the last line in main().
Right-click into the small grey border on the left-hand side and select
Toggle Breakpoint to set a new breakpoint.
PHYTEC Messtechnik GmbH 2015 L-781e_7 33

phyFLEX®-i.MX 6
3.2.4 Stepping through and Watching Variable Contents
In this part you will step through the example project with the debugger. You will also
learn how to check the content of a variable.
Expand bu
f in the Variables window.
Click the Step Over button in the Debug window to step to the next line. You will see the
content of the buf variable in the Variables window.
34
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
Click on the variable buf.
Then click the button Step into to enter th
e function write_tty().
The debugger stops i
n write_tty().
You will see the following variable window:
PHYTEC Messtechnik GmbH 2015 L-781e_7 35

phyFLEX®-i.MX 6
Click on the variable buffer.
You will probably see a different address on the buffer pointer. Remember which address is
shown in your case, you will need this address later.
3.2.5 Stepping through and Changing Variable Contents
In this section you will change the value of a variable. At the end of this part you will see
the effect of this change.
Select the count variable in the Variables window.
Right-click on count and select Change Value.
Change the value of count to
7 and click OK.
Open Microcom if the application is not already opened.
Go back to Eclipse.
Clic
k the Step Over button twice.
Switch to Microcom.
Because we changed the count variable to 7 only the first seven characters (Welcome) are
displayed in the Microcom console.
36
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
3.2.6 Using the Memory Monitor
In the last section of this chapter you will use the memory monitor to control the content
at a memory address.
Select the Memory tab in the frame where you can find the Console.
Click + Add Memory Monitor.
Enter the address of the buffer and click OK. Remember that the variable's address
might be different on your system.
Change the size of the window.
Clic
k Add Rendering.
PHYTEC Messtechnik GmbH 2015 L-781e_7 37

phyFLEX®-i.MX 6
Select ASCII and click Add Rendering(s).
38
PHYTEC Messtechnik GmbH 2015 L-781e_7
e variable buffer at address 0xb
ef9ec47 (or at the specific
ddress used on your system).
Now click the Resume button from the menu bar.
The debugger stops at the breakpoint in the last line of main().
You can see the contents of th
a

Quickstart Instructions
Click the Resume button to end the application.
You have successfully passed the debugging chapter. You are now able to
configure and use Eclipse for remote debugging. You can step through a
project, watch and change the content of variables, and you can use the
memory monitor to view the content at a memory address.
PHYTEC Messtechnik GmbH 2015 L-781e_7 39

phyFLEX®-i.MX 6
4 Working with Qt Creator
In this section we learn how to work with Qt Creator. The Qt framework provides tools to
develop graphical user interfaces. With the help of an example project we show how to
compile your own Qt based programs and automatically transfer them to the target.
4.1 Stop the Running Qt Demo on the Target
A Qt demo application starts automatically by default after the target has booted
completely.
Qt provided by Digia is very commonly used for embedded systems and it is
supported by this BSP. Please visit http://www.qt.io in order to get all the
documentation that is available about this powerful cross-pl
atform GUI
toolkit.
Some demos that show the capabilities of Qt version 5.3.2 are included in
the BSP.
Before we start compiling and running our example project out of Qt Creator we must first
close this Qt application.
Open a serial connection with Microcom.
After the target is booted login with root and enter the following command to stop the
Qt applicat
ion:
systemctlstopqt5demo
After the Qt demo is stopped with the command above we can start to use Qt Creator.
If you want to remove the qt5demo from the autostart enter the following
command:
systemctldisableqt5demo
4.2 Importing the Demo Application
We start with opening the Qt Creator in a terminal, because otherwise the correct
environment of the toolchain is not set.
40
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
Open a terminal.
Enter the following command in the terminal to start Qt Creator
/usr/bin/qtcreator.sh&
The user interface of Qt Creator appears:
Now we import the example project by clicking Open Project.
This opens a dialog in which the path to /opt/prj_workspace/Qt is set automatically.
PHYTEC Messtechnik GmbH 2015 L-781e_7 41

phyFLEX®-i.MX 6
Double-click on the HelloWidget folder.
Select HelloWidget.pro and click Open.
The HelloWidget project is now imported into your Qt Creator workspace.
4.3 Work with the Demo Application
42
PHYTEC Messtechnik GmbH 2015 L-781e_7
Our example project is a simple Qt Widget Application. First we take a look at the user
interface of our example:

Quickstart Instructions
Expand the folder Forms under the project sidebar on
the left side and double-click
mainwindow.ui.
Qt Creator opens the design mode and you can see the design of our project, which has a
menu bar with an exit action under the menu item miniQT, one label and three buttons
including one with the PHYTEC logo inside.
PHYTEC Messtechnik GmbH 2015 L-781e_7 43

phyFLEX®-i.MX 6
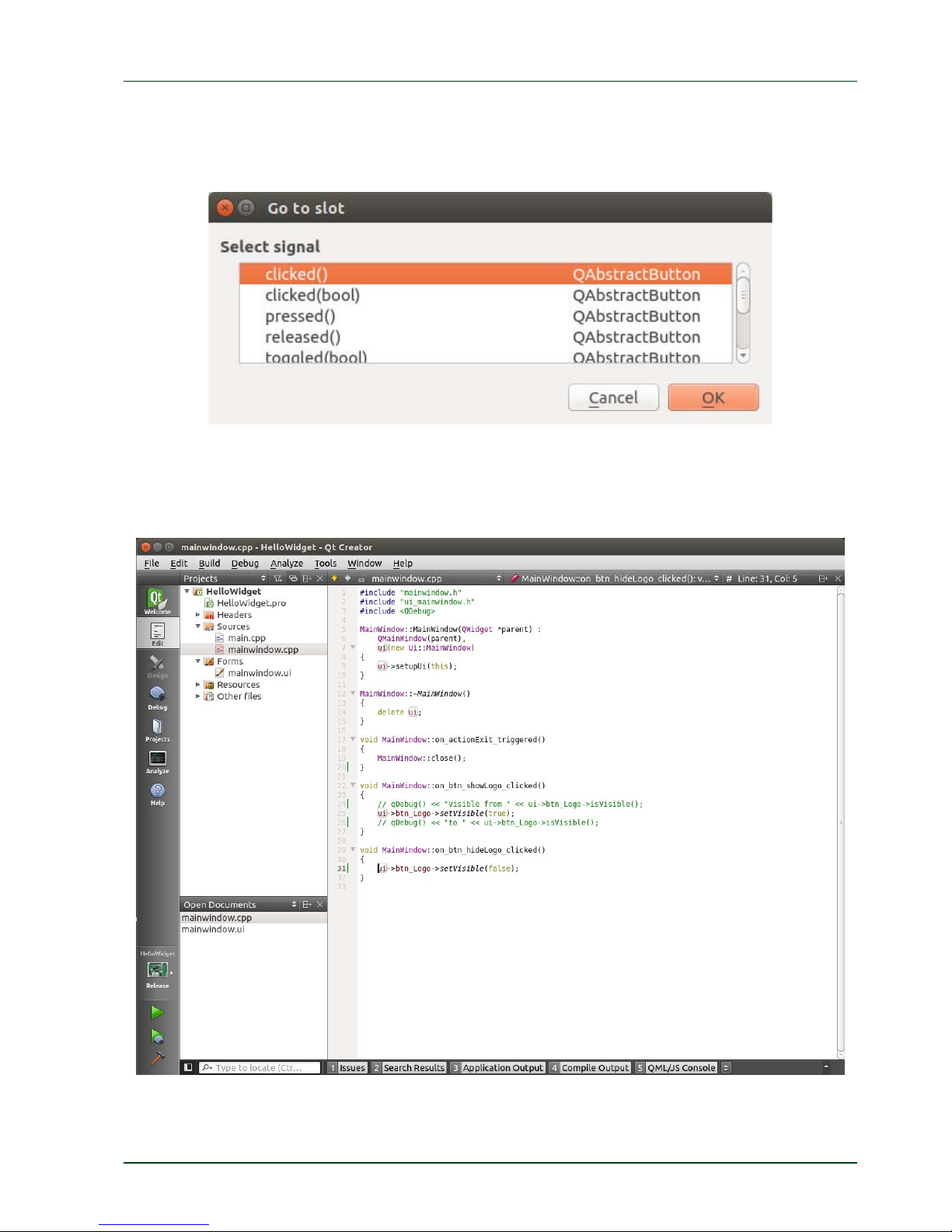
Right-click the “Hide Logo” button and select Go to slot … from the context menu.
44
PHYTEC Messtechnik GmbH 2015 L-781e_7
Quickstart Instructions
A window opens allowing you to select a signal.
Select clicked() and clic
k OK.
Now Qt Creator jumps into the mainwindow.cpp where you can find the definition of the
function on_btn_hideLogo_clicked(). You see that clicking this button changes the status
of the btn_Logo button from visible to hidden.
Next we build and run the example.
PHYTEC Messtechnik GmbH 2015 L-781e_7 45
4.4 Compile and Run the Demo Application on the Target

phyFLEX®-i.MX 6
Now we want to compile and run the demo application on the phyFLEX-i.MX6. The correc
t
Qt settings are already preset in the virtual machine, so the project can be build directly.
If you want to check the settings click Tools ►Options… in the menu bar. A
new dialog appears. Click Build & Run if it is not already selected. Now, you
can select different tabs to see the settings for the workspace, compiler,
debugger, Qt version and a lot other options.
Be sure that the target is connected via Ethernet and is powered on. As
described before do not forget to stop all actually running Qt applications
on the target.
With only one click the project will be built, deployed to the target and executed.
Click the green filled triangle near the bottom of the gray bar on the left.
46
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
After the target is successfully deployed on to the target the Application Output frame is
shown in the frame under the mainwindow.cpp source code where you can see the prompt
from the phyFLEX-i.MX6.
PHYTEC Messtechnik GmbH 2015 L-781e_7 47
ication. Click the
big button with
he PHYTEC logo to enable and disable the Welcome label.
ifferent build steps click Compile output which can be found in the bottom
The Compile output frame is opened and you can scroll threw through the compile steps.
On the connected display you will see the HelloWidget appl
t
To see the d
menu bar.

phyFLEX®-i.MX 6
If you want to stop the application on the target switch back to the Application output
frame and click the red rectangle there.
You have successfully imported and built a Qt project with Qt Creator.
You have also learned how to download and execute your application on
the target.
4.5 Compile and Run the Demo Application on the Host
In some cases you do not want to compile and run the application on the target. For
example if the phyFLEX-i.MX6 is not connected to the host or if you only changed some
user interface relevant things and you do not want to copy the application and all the
necessary resources to the target. Running the demo application on the host is faster, but
features specific to the target do not work.
To change the target for downloading and running the application do following steps:
In the gray bar on the left click the button with the small phyFLEX-i.MX6 picture.
In the ope
ned context menu select Desktop as Kit and Release as Build.
48
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
Click outside of the context menu to close
it.
Now you can start the compilation and execution of the application by clicking the green
triangle.
After the application is compiled a window opens displaying the application running.
Close the running application.
4.6 Debugging the Demo Application
We finish the Qt Creator chapter by showing how to debug the HelloWidget demo
application.
4.6.1 Using QDebug for simple Debugging Messages
In our first debuggin
g step we use the QDebug class. This class provides an output stream
for debugging information. It is used whenever the developer needs to write out
debugging or tracing information to a device, file, string or console.
To make use of the QDebug functions QDebug is already included in the header of the file
mainwindow.cpp.
In this file you will also see two out-commented lines in the function
on_btn_showLogo_clicked() which start with a qDebug() command. This is an example how
to make use of qDebug().
PHYTEC Messtechnik GmbH 2015 L-781e_7 49

phyFLEX®-i.MX 6
Remove the comment flags ( // ) from both "qDebug lines" to enable the two debug
messages.
Save the changes with Ctrl + S .
Open the Application Output if it is not already opened.
Build and run the application on the Desktop with the build configuration Release, as it
was shown in the chapter before.
A window with the running application opens.
Press the Show Log
o button.
The logo was visible before we pressed the button so we see the appropriate message from
qDebug() in the Application Output.
Press the Hide Logo button and then the Show Logo button.
Now the logo was hidden before we pressed the Show Logo button again and we see the
appropriate message from qDebug() in the Application Output.
QDebug is a simple way to generate debug information. In the next chapter we use the
debugger integrated i
n Qt Creator.
50
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
4.6.2 Using the integrated Qt Creator Debugger
Before we start the integrated Debugger we first set a breakpoint where the demo
application stops.
Open the mainwindow.cpp if it is not already open.
Right-click in front of line number 31.
In the context menu click on Set Breakpoint at Line 31 to add a breakpoint.
You now see a red fille
d circle with a small sand glass in front of this line.
The next step is to change the build configuration from Release to Debug.
In the gray bar on the
left click the button with the small Desktop icon.
In the ope
ned context menu select phyFLEX-i.MX6 as Kit and Debug as Build.
PHYTEC Messtechnik GmbH 2015 L-781e_7 51

phyFLEX®-i.MX 6
Be sure that the target is connected via Ethernet to the host.
Start Debugging by clicking on the green filled triangle with the small magnifier.
The debugger starts and Qt Creator changes his view to the Debug mode.
The demo application is shown on the connected display.
In the running demo application clic
k on the Hide Logo button.
52
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
When the button is pressed the debugger stops at the created breakpoint, because the
function is called. Yo
u can now watch the stack or the Locals and Expressions.
Step into the setVisibl
e function by pressing the Step Into button.
Now the definition of this function is opened.
PHYTEC Messtechnik GmbH 2015 L-781e_7 53

phyFLEX®-i.MX 6
As many other calls are following it is recommended to close the opened qwidget.cpp.
Close qwidget.cpp in the Open Documents frame by clicking the X on the right side.
Continue the stoppe
d application by clicking on Continue.
Now the demo applica
tion is continued and waiting for user interactions.
Stop the Debugger by pressing Stop Debugger.
54
PHYTEC Messtechnik GmbH 2015 L-781e_7
You have successfully finished our short introduction to the Debugger from
Qt Creator.

Quickstart Instructions
5 Working with Yocto
In this chapter of the Quickstart we describe only the basic Yocto usage. For
in-depth explanations refer to the Yocto Reference Manual.
In this part you will learn how to use the Yocto Project and the PHYTEC BSP.
5.1 Add new packages to the Root Filesystem
You can find the pre-build BSP in the virtual machine under /opt/PHYTEC_BSPs/phyFLEXi.MX6/. All necessary tools and programs are already pre-installed to directly start with
Yocto.Open a new terminal if you have not already done and change to the directory of the
pre-installed BSP:
Click the terminal icon on your desktop.
Type the following command to change to the BSP-directory:
cd/opt/PHYTEC_BSPs/phyFLEX‐i.MX6/
This directory is the start point for our BSP. You will also find further documents in this
directory. First we must set the correct environment.
Enter the following command
sourcesources/poky/oe‐init‐build‐env
PHYTEC Messtechnik GmbH 2015 L-781e_7 55

phyFLEX®-i.MX 6
The environment is set and we are now in the build folder. In this example we want to add
the nano editor to the image. Usually new packages are downloaded from an appropriate
server prior to building the image unless they are stored locally. In the virtual machine the
package for the nano editor is already pre-downloaded and available locally.
Before we add the package we check if the right configuration is set.
Open the configuration file with any editor, e.g. VI, with the following command:
viconf/local.conf
Check the MACHINE variable in this file.
56
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
By default the variable is set to phyflex-imx6-2. This is the corre
ct MACHINE for the PFL-
A-02-13237E0 module..
In the same file we can add nano by adding the following line at the end of the file (as
shown in the previous picture):
IMAGE_INSTALL_append=“nano”
Save the changes and close the file with :x and Enter.
PHYTEC Messtechnik GmbH 2015 L-781e_7 57

phyFLEX®-i.MX 6
You can search for more available packages at:
http://layers.openembedded.org/layerindex/branch/master
/recipes/
Be sure that the layer on which the package depends is in our BSP. You can
check our integrated layers in the file conf/bblayers.conf .
When your needed layer is not in our BSP you must first checkout the layer
to the folder /opt/PHYTEC_BSPs/phyFLEX-i.MX6/source/ .
Please note that there is no a guarantee that the build process proceeds
successfully with all new packages added.
Now you can start building the configured BSP. There are two methods to
create the images. You can use either bitbake phytec-hwbringup-image, or
bitbake phytec-qt5demo-image
The first option leads to a faster compilation and smaller images, because all Qt relevant
features are left out.
In our example we want to keep the Qt relevant features, so we type following command:
bitbakephytec‐qt5demo‐image
Because of dead links it is possible that an attempt to download a source
package fails. PHYTEC cannot guarantee the accessibility of all the web
pages that are needed to build a BSP. In case of a failure please check our
ftp-server at ftp://ftp.phytec.de/pub/BSP_PACKAGES/EXTERNALS, and
download the source package from there into the source dire
ctory under
/opt/PHYTEC_BSPs/phyFLEX-i.MX6/build/downloads manually. After that,
please restart the build process by again calling
bitbake phytec‐
qt5demo‐image
orbitbakephytec‐hwbringup‐image.
If the package is also missing on our ftp-server, please send an email to
support@phytec.de. We will then take it from our build-server and upload
it onto our ftp-server for you.
Among other images you will find the kernel named zImage, the device tree named zImage-
imx6q-phytec-pbab01.dtb and the root file system named phytec-qt5demo-image-phyfleximx6-2.ubifs in the directory deploy/images/phyflex-imx6-2/.
The three files are only a symbolic link to the correct images with the timestamp of the
build date.
58
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
5.2 Writing the Root Filesystem into the Target’s Flash
In this section you will find a description on how to write the newly created root filesystem
into the phyFLEX-i.MX6’s flash memory. Before the images can be written into the flash, it
must be uploaded to the phyFLEX-i.MX6 from a TFTP server. This will be done from the
command line of the boot loader. The partition of the root filesystem will be formatted.
Then the image will be downloaded over TFTP to the created flash partition.
You should never erase the Barebox partition. If this partition is erased,
you will not be able to start your target anymore. In such a case, refer to
our BSP Manual.
The versions of the Barebox and the Linux kernel must match. Therefore
the following steps should only be done using the hardware that was
shipped together with the virtual machine and thus already contains the
same version of the BSP.
First open a new terminal window if it is not opened yet. Then change to the directory
/opt/PHYTEC_BSPs/phyFLEX-i.MX6/build/deploy/images/phyflex-imx6-2/
Copy the root filesystem to the folder /tftpboot:
cpphytec‐qt5demo‐image‐phyflex‐imx6‐2.ubifs/tftpboot/
Open Microcom and press the RESET button on the target.
You will see the output .Hit any key to stop autoboot..
Press any key to stop autoboot.
PHYTEC Messtechnik GmbH 2015 L-781e_7 59

phyFLEX®-i.MX 6
Check the network settings with following command:
ifupeth0
devinfoeth0
The target should return these lines:
..ipaddr=192.168.3.11..... e
..netmask=255.255.255.0. ic
..gateway=255.255.255.0. .
..serverip=192.168.3.10...ev
If you need to change something, type:
edit/env/network/eth0
edit the settings, save them by leaving the editor with Strg-D, then typesaveenv and
reboot the board.
Now we flash the root filesystem. T ype:
ubiformat/dev/nand0.root
ubiattach/dev/nand0.root
ubimkvol/dev/ubi0root0
cp/mnt/tftp/phytec‐qt5demo‐image‐phyflex‐imx6‐2.ubifs/dev/ubi0.root
Enter boot to boot the phyFLEX-i.MX6 with the new kernel and root file system.
After the target has successfully finished booting, type
root to log in.
60
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
Now we ca
n test the newly installed editor nano by trying to open a file with it.
Enternano/etc/profile.
Close nano by pressing CTRL+X.
Close Microcom after nano is closed.
Troubleshooting:
If any problem occurs after writing the kernel or the root filesystem into the
flash memory, you can restore the original kernel (zimage) from the
/tftpboot directory. The root file system is available in the following
directory of the virtual machine:
/opt/PHYTEC_BSPs/phyFLEX-iMX6/build/deploy/images/phyflex-imx62/phytec-qt5demo-image-phyflex-imx6-2-20150915092725.rootfs.ubifs
All files are also downloadable from our ftp server. If you want other
versions also check our ftp server:
ftp://ftp.phytec.de/pub/Products/
For more information about how to update the software on our target,
please refer to our BSP Manual.
In this section you learned how to prepare the partition of the root
filesystem and how to download the root filesystem from a TFTP server into
the flash of the target.
PHYTEC Messtechnik GmbH 2015 L-781e_7 61

phyFLEX®-i.MX 6
6 Setup your own Linux-Host-PC
This chapter is for developers who want to use there own existing environment and not our
modified Ubuntu version. It is not needed if you are satisfied with our virtual machine.
We will give an overview of the modifications which we made to the Ubuntu version on the
phyFLEX-i.MX6 USB flash drive in comparison to the original Ubuntu in this chapter. In the
following we distinguish between optional and essential modifications. So you can see
faster which changes are important to execute this Quickstart in case you do not want to
use our modified Ubuntu version. You can find a step-by-step instruction of the essential
changes in order to modify your own distribution.
We can not guarantee that the presented changes are compatible to other
distributions or versions. If you want to use another distribution, it might
take a lot of individual initiative. We do not support other distributions.
You should be sure about what you do.
6.1 Essential Settings
In the following section you get a short instruction about the important settings which are
essential to guarantee the execution of the examples in this Application Guide.
6.1.1 Installing Ubuntu
We recommend to have at least 80 GB of free disk space available.
Download Ubuntu 14.04.3 LTS from www.ubuntu.com and create a bootable medium.
Boot Ubuntu from your created boot medi
um.
Select Install Ubuntu in the first Welcome window.
62
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
The Preparing to install Ubuntu… window appears. From Ubuntu it is advised that you
select Download updates while installing and Install this third-party software now.
PHYTEC Messtechnik GmbH 2015 L-781e_7 63

phyFLEX®-i.MX 6
64
PHYTEC Messtechnik GmbH 2015 L-781e_7
Click Continue.
The Installation type window appears. You now have different options how to install
Ubuntu. Depending on your system you have a number of possibilities that are shown in
the dialog. After you have chosen one click Continue.
The Install Ubuntu... window appears. After you have checked the settings you can click
Install now.
While the installation is started Ubuntu asks for your location, keyboard layout and login
and password details. Please insert this information and wait until the installation is
finished.
Finally you must restart your system after the installation is finished.
After that the system boots up and you can log into Ubuntu. Please configure your
network connection now and connect the phyFLEX-i.MX6
6.1.2 Installation of Software Packages
First of all various sof
tware packages that are required must be installed using the package
manager APT.
To gain a better understanding of the packages required, they are installed separately
according to their function:
1. Packages which are needed for compiling and building the Board Support Package:
sudoapt‐get‐yinstallgawkwgetgit‐corediffstatunziptexinfo
gcc‐multilibbuild‐essentialchrpathsocatlibsdl1.2‐devxterm
2. Packages for development
sudoapt‐get‐yinstallvimeclipse
3. Packages to set up the TFTP server:
sudoapt‐get‐yinstalltftpd‐hpa
During installation some programs may ask for a license agreement. Just go through the
steps shown on the screen.
The first preparations are completed. In the next sections you will proceed with building
the Board Support Package installation of Eclipse and Qt Creator and the set up of the TFTP
server.

Quickstart Instructions
PHYTEC Messtechnik GmbH 2015 L-781e_7 65
6.1.3 Set the Git Configuration
The Board Support Package is heavily based on Git. Git needs some information from you as
a user to be able to identify which changes were done by whom. So at least set the name
and email in your git configuration, otherwise building the BSP generates many warnings.
Enter following two commands to directly set them
gitconfig‐‐globaluser.email“your_email@example.com”
gitconfig‐‐globaluser.name“namesurname”
6.1.4 Build the Board Support Package and Install the SDK
In this chapter we build our Board Support Package with the help of the Yocto Project.
First we create a folder for the BSP in our example we use the path as it is in our virtual
machine
Enter the following commands:
sudo mkdir‐p/opt/PHYTEC_BSPs/phyFLEX‐i.MX6/
sudochmod‐R777/opt/PHYTEC_BSPs/
cd/opt/PHYTEC_BSPs/phyFLEX‐i.MX6/
Download the phyLinux script and set execution privileges:
wgetftp://ftp.phytec.de/pub/Software/Linux/Yocto/Tools/phyLinux
chmod+x./phyLinux
The phyLinux script is a basic management tool for PHYTEC Yocto BSP releases. It is mainly a
tool to get started with the BSP structure. You can get all the BSP sources without the need
of interacting with repo or git.
Start the phyLinux script
./phyLinuxinit
During the execution of the init command, you need to choose your processor platform
(iMX6), PHYTEC's BSP release number (PD15.1.1) and the hardware you are working on
(phyflex-imx6-2 ).
After you downloaded all the meta data with phyLinux, you have to set up the
shell
environment variables. This needs to be done every time you open a new shell for starting
builds. We use the shell script provided by poky in its default configuration.
Type:
sourcesources/poky/oe‐init‐build‐env

phyFLEX®-i.MX 6
The current working directory of the shell should change to build/ and you are now ready
to build your first images.
Build the BSP:
bitbakephytec‐qt5demo‐image
Generate the SDK needed for Eclipse and Qt Creator:
bitbakephytec‐qt5demo‐image‐cpopulate_sdk
Install the SDK into the recommended default directory:
./
deploy/sdk/yogurt‐glibc‐*.sh
66
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
6.1.5 Set up Eclipse and Integrate Plug-ins
The instructions in this chapter
show how to
setup
Eclipse
and integrate the C/C++
plug
-in.
Thus you will be able to assign your own programs, written in Eclipse, to the target.
First of all you have to create a workspace folder, in which you can save your Eclipse
projects.
In this example we create the workspace in the /opt/ directory as it is in the virtual
machine:
mkdir‐p/opt/prj_workspace/Eclipse
sudochmod–R777/opt/prj_workspace/
Before we start Eclipse we must set the correct environment to our SDK:
sudo vi/usr/bin/eclipse
Enter following line before #!/bin/sh:
./opt/yogurt/iMX6‐PD15.1.1/environment‐setup‐cortexa9hf‐vfp‐neon‐
phytec‐linux‐gnueabi
Afterwards open Eclipse and insert the path to the created workspace in the pop-up
window:
eclipse
Enter the path to the created workspace:
/opt/prj_workspace/Eclipse
PHYTEC Messtechnik GmbH 2015 L-781e_7 67

phyFLEX®-i.MX 6
After Eclipse has started click Help in the menu bar and then Install new Software.
A window opens to add a plug-in to Eclipse.
In the drop-down menu Work with select
Indigo http://download.eclipse.org/releases/indigo
The available plug-ins appear in the selection area below now. Expand Programming
Languages and check C/C++ Development Tools. Clic
k Next.
Now the system displays an overview of the installation details. Click Next to proceed.
68
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
Finally accept the licensing agreement and click Fin
ish to start the installation of the
required software.
After that start Eclipse with the option clean, which cleans any cached data:
eclipse‐‐clean
Congratulations! You have successfully integrated the CDT plug-in in
Eclipse and now you can start programming in C/C++. In the next section
you will find a short introduction on how to install and setup the Qt
Creator.
6.1.6 Install and Setup Qt Creator
Because we want the same qmake version as in our BSP we install Qt Creator manually.
Download Qt Creator with following command:
wgethttp://download.qt.io/official_releases/qt/5.3/5.3.2/qt‐
opensource‐linux‐x64‐5.3.2.run
Set execute priviliges:
sudochmod+xqt‐opensource‐linux‐x64‐5.3.2.run
Run the Qt Creator installation routine
./qt‐opensource‐linux‐x64‐5.3.2.run
This opens a window for the installation.
Step trough the installation and if you are asked set following installation directory:
/opt/x64_Qt5.3.2
PHYTEC Messtechnik GmbH 2015 L-781e_7 69

phyFLEX®-i.MX 6
In the Select Components window keep the default selection of the components and click
Next.
Proceed trough the license agreement and start the installation.
After the installation is finished make a symbolic link to easily start Qt Creator:
sudoln‐s/opt/x64_Qt5.3.2/Tools/QtCreator/bin/qtcreator.sh
/usr/bin/qtcreator.sh
Set the correct environment to our SDK:
sudovi/usr/bin/qtcreator.sh
70
PHYTEC Messtechnik GmbH 2015 L-781e_7
Enter following line before #!/bin/sh:
./opt/yogurt/iMX6‐PD15.1.1/environment‐setup‐cortexa9hf‐vfp‐neon‐
phytec‐linux‐gnueabi

Quickstart Instructions
Create a workspace for QtCreator e.g.
mkdir‐p/opt/prj_workspace/Qt/build
Start Qt Creator with the following command in a terminal:
/usr/bin/qtcreator.sh
Add the phyFLEX-i.MX6 as device with following inputs by opening
Tools --> Options --> Devices --> Add --> Generic Linux Device:
Name: phyFLEX-i.MX6
IP: 192.168.3.11
Username: root
Keep
the password empty
Set the project directory and build directory
Tools --> Options --> Build & Run --> General.
Projects Directory --> Directory:
/opt/prj_workspace/Qt
PHYTEC Messtechnik GmbH 2015 L-781e_7 71

phyFLEX®-i.MX 6
Change the beginning of the entry in the Default build directory field:
../build/%{CurrentProject:Name}
Select tab Qt Versions and click Add… to add a new one.
Name:
iMX6_Qt5.3.2
qmake Location:/opt/yogurt/iMX6‐PD15.1.1/sysroots/x86_64‐yogurtsdk‐
linux/usr/bin/qt5/qmake
72
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
PHYTEC Messtechnik GmbH 2015 L-781e_7 73
Nam
mpiler Path:
/opt/yogurt/iMX6‐PD15.1.1/sysroots/x86_64‐yogurtsdk‐
linux/usr/bin/arm‐phytec‐linux‐gnueabi/arm‐phytec‐linux‐gnueabi‐gcc
Select tab Compilers and click on Add select GCC
e:
arm‐gcc
Co
Nam
Path:
/opt/yogurt/iMX6‐PD15.1.1/sysroots/x86_64‐yogurtsdk‐
Select tab Debuggers an click on Add
e:
arm‐gdb
linux/usr/bin/arm‐phytec‐linux‐gnueabi/arm‐phytec‐linux‐gnueabi‐gdb

phyFLEX®-i.MX 6
Select tab Kit and click on Adds
Name:
phyFLEX‐i.MX6
Device Type:GenericLinuxDevice
Sysroot:/opt/yogurt/iMX6‐PD15.1.1/sysroots/cortexa9hf‐vfp‐neon‐phytec‐
linux‐gnueabi
Compiler:arm‐gcc
Debugger:arm‐gdb
Qt version:iMX6_Qt5.3.2
Select Debugger on the left side of the window and click on the GDB tab.
Enter following command in the Addition Startup Commands:
setauto‐loadsafe‐path/
74
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
Click on Apply and close the window with OK.
Now all configurations are done and you can use this Kit to cross compile your application
also if you generate a new project.
6.1.7 Setting up a TFTP server
In the
chapter "Installation of software packages" you have installed the required
packages to set up a
TFTP
server.
Now we
have to change some short
settings.
First
change the file
/etc/default/tftp-hpa
as follows:
TFTP_USERNAME="tftp"
TFTP_DIRECTORY="/tftpboot"
TFTP_ADDRESS="0.0.0.0:69"
TFTP_OPTIONS="‐‐secure"
Then create a folder called /tftpboot. The TFTP server will access this folder later.
mkdir/tftpboot
Finally we
have to set the right permissions:
chmod777/tftpboot
PHYTEC Messtechnik GmbH 2015 L-781e_7 75

phyFLEX®-i.MX 6
Due to a bug in the current version of the TFTP-hpa daemon the daemon
does not start after the system is rebooted. You have to start it in the
terminal with the following command:
restarttftpd‐hpa
A permanent workaround is to create a file called tftp-hpa under
/etc/network/if-up.d/. Insert the following commands in the file:
#!/bin/sh
restarttftpd‐hpa
After saving the file set the correct permission with
chmod755/etc/network/if‐up.d/tftpd‐hpa.
You have successfully set up the TFTP server. In the future the phyFLEXi.MX6 can access to the /tftpboot/ folder to load the images.
6.1.8 Optional Settings
In the
following section
we list the optional settings.
These
settings are not needed for
a
successful
operation of this
Application Guide.
They only simplify
the handling and the
look
of
the system.
For
this reason
we show
the
modifications
without big
explanation.
vim, the improved vi editor is installed.
Desktop-icons for faster and easier start of required programs are created.
The following modifications were made to the look of Ubuntu:
– Other wallpaper and associated options are adjusted with the help of gsettings
– The color of the Gnome terminal is changed.
- The scrolling log for the Gnome terminal is changed.
History-search-backward and history-search-forward in /etc/inputrc is activated.
This allows you to search through your history with the entered string.
Also there are some scripts that will be executed at the first start after the installation.
These scripts ensure that the right permissions are set for the created user.
Congratulations! You have successfully configured your Ubuntu to work
with.
76
PHYTEC Messtechnik GmbH 2015 L-781e_7

Quickstart Instructions
PHYTEC Messtechnik GmbH 2015 L-781e_7 77
Revision History
Date Version # Changes in this manual
21.09.2012 Quickstart
L-781e_1
First draft
10.10.2013 L-781e_4 Update Quickstart for working with Ubuntu 12.04
Update Quickstart for working with PD13.1.0
New barebox handling
Fixed some issues
29.01.2014 L-781e_5 Update Quickstart for working with PD13.2.2
Fixed some issues
11.03.2014 L-781e_6 Change description for updating the bootloader
17.09.2015 L-781e_7 Major alteration
Change LiveDVD to virtual machine hard disk image
Change ptxdist to Yocto
Update for working with Ubuntu 14.04.3
Update for working with PD15.1.1
Update for working with SO-525v9
Add Programming with Qt Creator
Remove chapter Updating the Software (now in BSP Manual)

phyFLEX®-i.MX 6
78
PHYTEC Messtechnik GmbH 2015 L-781e_7
Document: phyFLEX-i.MX6
Document number: L-7816e_7, September 2015
How would you improve this manual?
Did you find any mistakes in this manual? page
Submitted by:
Customer number
:
Name:
Company:
Address:
Return to:
PHYTEC Messtechnik GmbH
Postfach 100403
D-55135 Mainz, Germany
Fax : +49 (6131) 9221-33

79
 Loading...
Loading...