

Page 1

PHOENIX AC DRIVE
MODBUS PROTOCOL
DX, EX, DS & ES
3 TO 3500 HP
MODBUS RTU PROTOCOL
MODBUS TCP PROTOCOL
MODBUS USD PROTOCOL
Page 2

SECTION TITLE PAGE
1.0 INTRODUCTION 1-1
2.0 HARDWARE INTERFACE 2-1
2.1 RS-485 4 Wire Operation 2-1
2.2 RS-422 4 Wire Operation 2-1
2.3 RS-232 Operation 2-1
2.3.1 RS-232C-to-RS-422 Interface 2-1
Adapter
2.3.2 Direct RS-232 Wiring 2-1
2.3.3 RS-232 Isolated Communications
Interface 2-2
2.4 Ethernet Operation 2-2
3.0 MODBUS RTU PROTOCOL 3-1
DESCRIPTION
3.1 Introduction Modbus Protocol 3-1
3.1.1 Transaction on Modbus Networks 3-1
3.1.2 The Query-Response Cycle 3-1
3.2 Two Serial Transmission Modes 3-1
3.2.1 RTU Mode 3-2
3.2.2 ASCII Mode 3-2
3.3 Modbus Message Framing 3-2
3.3.1 RTU Framing 3-2
3.3.2 ASCII Framing 3-3
3.3.3 How the Address Field is Handled 3-3
3.3.4 How the Function Field is Handled 3-3
3.3.5 Contents of the Data Field 3-3
3.3.6 Contents of the Error Checking Field 3-4
3.3.7 How Characters are Transmitted 3-4
Serially
3.4 Error Checking Methods 3-4
3.4.1 Parity Checking 3-4
3.4.2 CRC Checking 3-5
4.0 MODBUS TCP PROTOCOL
DESCRIPTIONS 4-1
4.1 Ethernet Frame 4-1
4.2 Modbus TCP Message Framing 4-1
4.3 Modbus TCP Header Description 4-1
4.4 Ethernet TCP Message Framing 4-2
5.0 MODBUS FUNCTION FORMATS 5-1
5.1 Field Contents in Modbus Messages 5-1
5.2 Function Codes 5-1
6.0 PHOENIX AC DRIVE FUNCTION 6-1
6.1 MODBUS USD Function Formats 6-1
6.2 MODBUS RTU Function Formats 6-3
6.3 MODBUS USD Alternate Function Format 6-4
FORMATS
TABLE OF CONTENTS i
SECTION TITLE PAGE
7.0 EXCEPTION RESPONSE 7-1
7.1 Exception Codes 7-1
8.0 CRC GENERATION 8-1
9.0 PARAMETER CONVERSION 9-1
9.1 Parameter Coding Format 9-1
9.2 Parameter to Register Address
Conversion 9-1
APPENDIX PAGE
1.0 INTRODUCTION A-1
1.1 Introduction A-1
1.2 Layering A-1
2.0 NETWORK LAYER A-2
2.1 IP A-2
2.2 IP Address A-2
2.3 IP Address Classes A-3
2.4 Netmasks A-3
2.5 Subnet Address A-3
2.6 Directed Broadcast Address A-3
2.7 Limited Broadcast Address A-3
2.8 ICMP A-3
3.0 LINK LAYER A-3
3.1 ARP A-3
4.0 THE TRANSPORT LAYER A-4
4.1 UDP A-4
4.2 TCP A-4
5.0 THE APPLICATION LAYER A-4
5.1 DNS A-4
6.0 ETHERNET FRAME A-4
6.1 Ethernet Frame A-4
6.2 Encapsulation A-4
Page 3
LIST OF FIGURES AND TABLES
ii
FIGURE TITLE PAGE
2.1 RS-485 4-Wire Multi Drop Hookup 2-3
2.2 RS-422 4-Wire Point-to-Point Hookup 2-3
2.3 Quasi – RS 232 Hookup 2-3
2.4 Installation of Isolated RS-422/485 Board 2-4
2.5 Installation of Removable RS-232 Isolated
Communication Interface with Cable 2-5
2.6 Installation of Isolated RS-422/485 Board 2-6
2.7 Installation of Removable USB-RS-485
Isolated Communications Interface 2-7
4.1 Ethernet Frame 4-1
4.2 Encapsulation of Modbus RTU Frame 4-1
4.3 Encapsulation of Modbus RTU Frame
In Ethernet Frame 4-2
APPENDIX
FIGURES TITLE PAGE
A-1 The Four Layers of the TCP/IP Protocol
Suite A-1
A-2 Two Hosts on a LAN Running TCP A-2
A-3 Various Protocols at Different Layers
In the TCP/IP Protocol Suite A-2
A-4 Ethernet Frame (RFC 894) A-4
A-5 Encapsulation of Data as it goes down
The Protocol Stack Page A-5
Page 4
1.0 INTRODUCTION
The US DRIVES PHOENIX digital AC drive has an
optional isolated
enables the user to control and setup the drive using a
host computer, such as an IBM compatible PC. The
drive’s serial interface may be configured to support
either the RS-422 or RS-485 interconnect standard. In
addition, schematics shown in this document show a
simple hookup that permits an RS-232 interface (this
hookup does not meet EIA standards, due to noise
immunity levels, but will work with most host
computers). The PHOENIX Modbus USD protocol is
loosely based on the MODBUS RTU Protocol and
features full CRC (Cyclical Redundancy Check)
protection in both directions. The Phoenix drive
defaults to 9600 Baud Rate, No Parity, 8-Bit Data and
2 Stop Bits.
Using an RS-485 serial interconnect, up to 32 drives
can be party-lined to permit the host computer to
setup and query any one of them. With using the
Ethernet Communications Card, any host computer on
a network can communicate to the Phoenix AC Drives.
The PHOENIX AC drive contains an onboard database
of over 282 parameters that define and describe drive
setups and operating conditions. In essence, a user
armed with a printout of the drive’s parameters can
configure and operate the drive with a simple read
and write command to the desired parameter.
For those users wishing to develop their own host
computer drive control software, the following sections
of this manual describe the Modbus USD, Modbus
RTU, and Modbus TCP Protocols that are used.
serial communication interface that
INTRODUCTION 1-1
Page 5

1-2 INTRODUCTION
END OF INTRODUCTION SECTION
Page 6

2.0 HARDWARE INTERFACE
2.1 RS-485 4-Wire Operation
RS-485 and RS-422 interfaces use differential
transceivers for increased noise immunity, since any
noise induced in one wire will usually be induced in
the other wire and thus will be canceled out at the
differential receiver.
RS-485 4-Wire operation allows 32 drivers and 32
receivers to be party-lined together at distances up to
4000 feet. This allows a host computer to talk to 31
drives. The host computer has its transmitter and
receiver enabled at all times. The drives always have
their receivers enabled but only one drive transmitter
on the party-line can be enabled at any one time.
The host computer transmits a query to a specific
drive (queries have an address field that identifies the
destination drive). Even though all drives on the
party-line or network receive the query and decode it,
only one drive will prepare and transmit a response.
The destination drive enables its transmitter during its
response and disables it immediately after
transmission is complete. This sequencing of the drive
transmitters is built into the PHOENIX drive software.
The host software requires no special hand-shaking
since the transmitter and receiver are enabled at all
times.
There are a number of electrical supply houses that
offer RS-485 interface cards for IBM-compatible PCs.
US Drives has decided to only support 4-Wire RS-485
and RS-422 operation because standard MS-DOS serial
device drivers may be used without modification. The
proper hookup for 4-Wire RS-485 Multi-Drop between
a host PC and a number of PHOENIX drives is shown
in Figure 2-1.
2.2 RS-422 4-Wire Operation
RS-422 4-Wire operation is similar to RS-485 4-Wire
operation except that the wiring is “point-to-point”
with no other drives party-lined. This mode works at
full duplex and is illustrated in Figure 2-2.
2.3 RS-232 Operation
The PHOENIX drive permits a direct RS-232 interface.
It is felt, however, that the differential transmission
scheme offered by the RS-422/485 standard is much
more suitable for an industrial environment. Direct
connection to a PC using the RS-232 scheme is not
HARDWARE INTERFACE 2-1
recommended for drives operating on the factory
floor.
Those users that still wish to use a RS-232 interface
have the following alternatives.
2.3.1 RS-232C-to-RS-422 Interface
Adapter
Users who wish to use the PC’s RS-232C serial port
can install a RS-232C-to-RS-422 converter that is
readily available from a number of electrical suppliers.
It need not be isolated, as the PHOENIX user serial
port is already electrically isolated from the rest of the
drive. These converters typically look much like a “25
pin gender changer” plug with the conversion circuits
built into the plug. Power is normally supplied to the
converter by an AC-DC adapter that plugs into an
110vac duplex outlet.
2.3.2 Direct RS-232 Wiring
The following “scheme” is not recommended for
permanent use. By connecting the +RXD and +TXD
pins to the PC RS-232 ground, a quasi-single ended
RS-232 interface can be accomplished.
Normal RS-232C signals bounce between +10 volts
and –10 volts (the positive rail voltage can be between
the values of +3 volts and +25 volts – likewise for the
negative rail). Thus, +10 volts is interpreted as a logic
“0” while -10 volts is interpreted as a logic “1”. Most
RS-232C receivers will detect zero volts as a logic “1”
due to hysteresis effects which allows the wiring
scheme shown in Figure 2-3 to work (usually!).
This direct connection generates RS-232C levels of
approximately +3.7 volts to -3.7 volts. Note that the
isolated RS-422/485 common on the PHOENIX control
board (TB6-5) must not be grounded or it will shortcircuit the +TXD line if the PC is grounded. This direct
RS-232 wiring scheme, if it must be done, is most
appropriate when using a laptop PC that is floating
from earth ground.
Page 7
2-2 HARDWARE INTERFACE
INTERNET/INTRANET
PLC PC ETHERNET
ETHERNET PATCH
NETWORK HUB
PHOENIX
PHOENIX
PHOENIX
SERIAL RS
-
485 4 WIRE
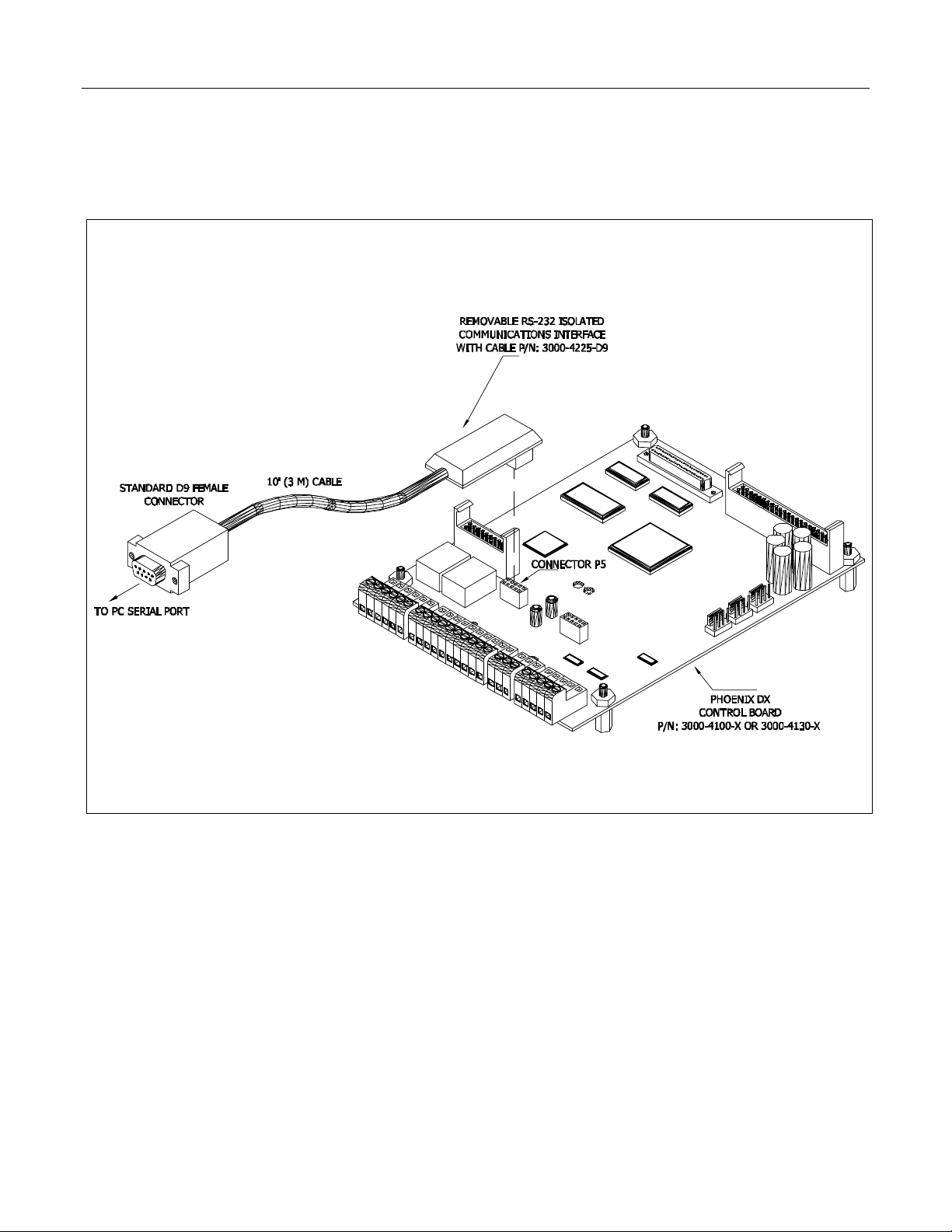
2.3.3 RS-232 Isolated Communication
Interface
Using the Removable RS-232 Isolated Communication
Interface, user’s can use the PC’s RS-232C serial port.
The Communication Interface isolates the PC from the
Phoenix AC Drive and no external power supply is
needed. This comes with D9 female connector, 10’
cable, and removable RS-232 Isolated Communication
interface. Figure 2.6 shows the installation of the
removable RS-232 Isolated Communication card.
2.4 Ethernet Operation
Ethernet is a local area network technology that
transmits information between devices at speeds of 10
and 100 mbps. The word Ethernet refers to hardware
called out in IEEE specification 802.3 and has become
an increasingly popular medium for communication in
industrial environments. The protocols are
implementation of TCP and UDP transport used with
Ethernet hardware. This allows many different
applications to run over the same network and the
same cables. Thus, webservers and email run on the
same physical connection courtesy of TCP/IP.
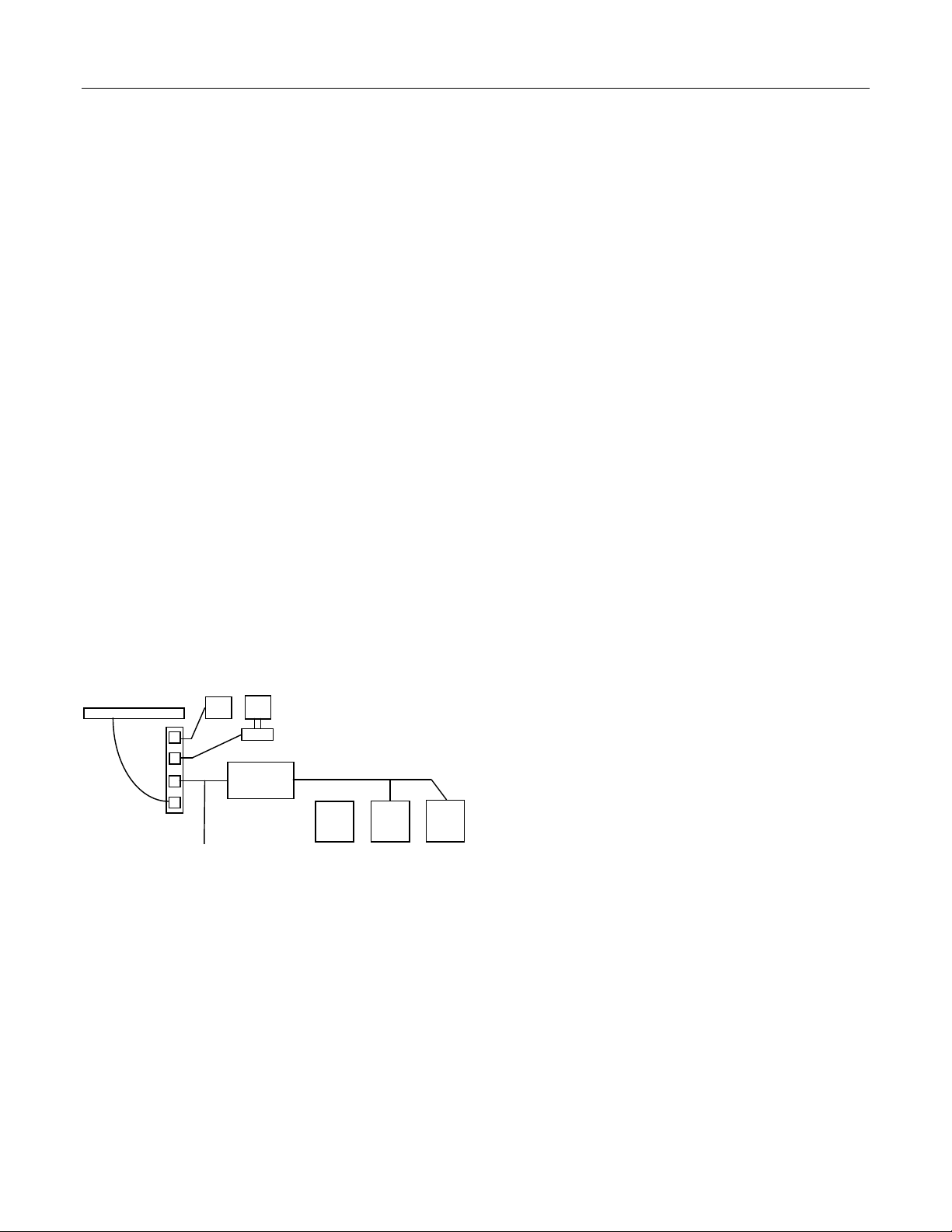
The Ethernet Gateway Device is used to interface
Phoenix AC Drives to Ethernet Network. The figure
below shows a typical network connection of the
Phoenix AC Drives using a Ethernet Gateway Device.
OR
SWITCH
CABLE
GATEWAY
DEVICE
AC
DRIVE
#1
AC
DRIVE
#2
AC
DRIVE
#2
Page 8

HARDWARE INTERFACE 2-3
Figure
2.3
Figure 2.2
Figure 2.1
Page 9
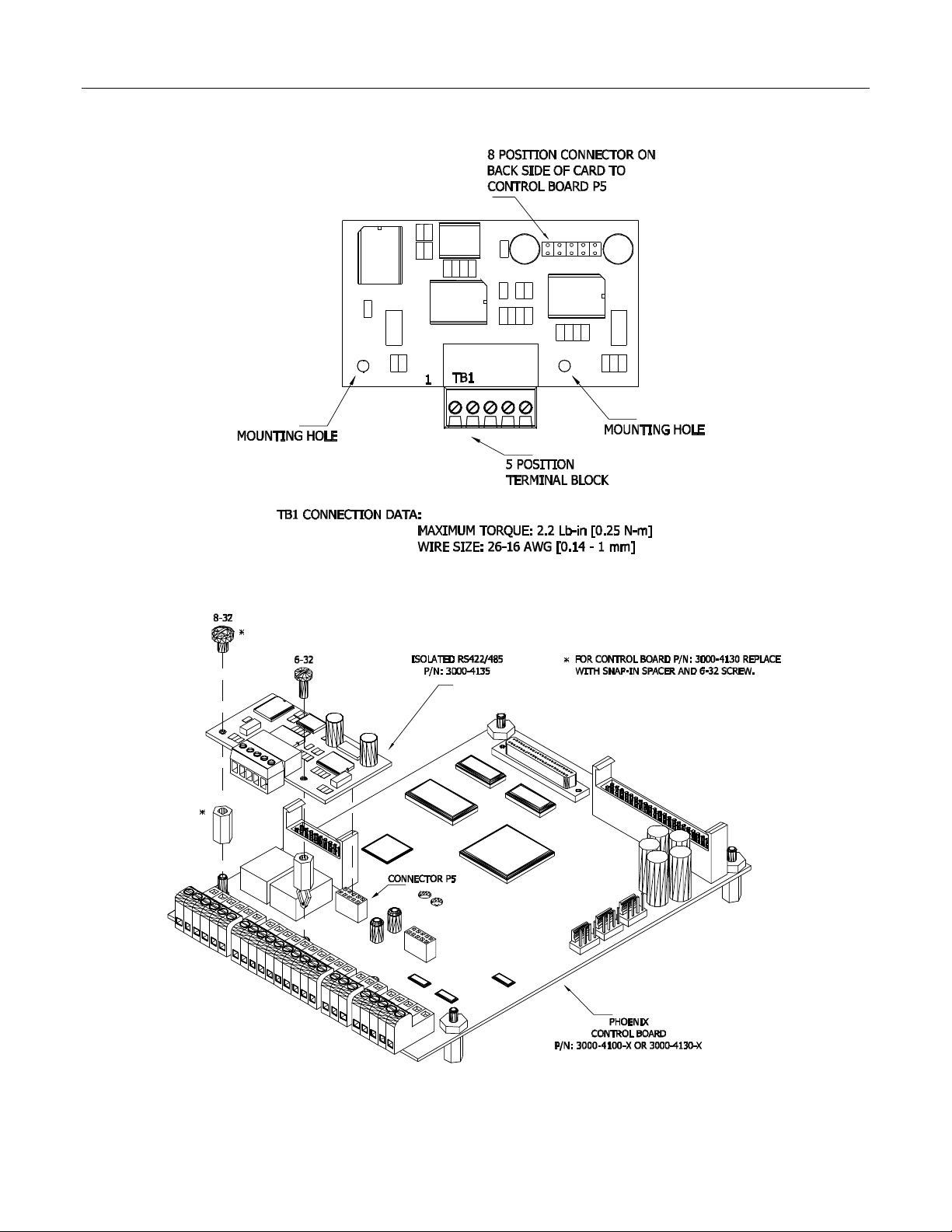
2-4 HARDWARE INTERFACE
Isolated Communication Card 3000-4135-1
Installation of Isolated RS-422/485 Board
(with Control Board 3000-4100 & 3000-4130)
Figure 2.4
Page 10
HARDWARE INTERFACE 2-5
Removable USB/RS-485 Isolated Communications Interface with Cable
P/N: 3000-4226-USB
Installation of Removable USB-RS-485 Isolated Communications Interface with Cable
P/N: 3000-4226-USB (with Control Board 3000-4100 & 3000-4130)
Figure 2.5
Page 11
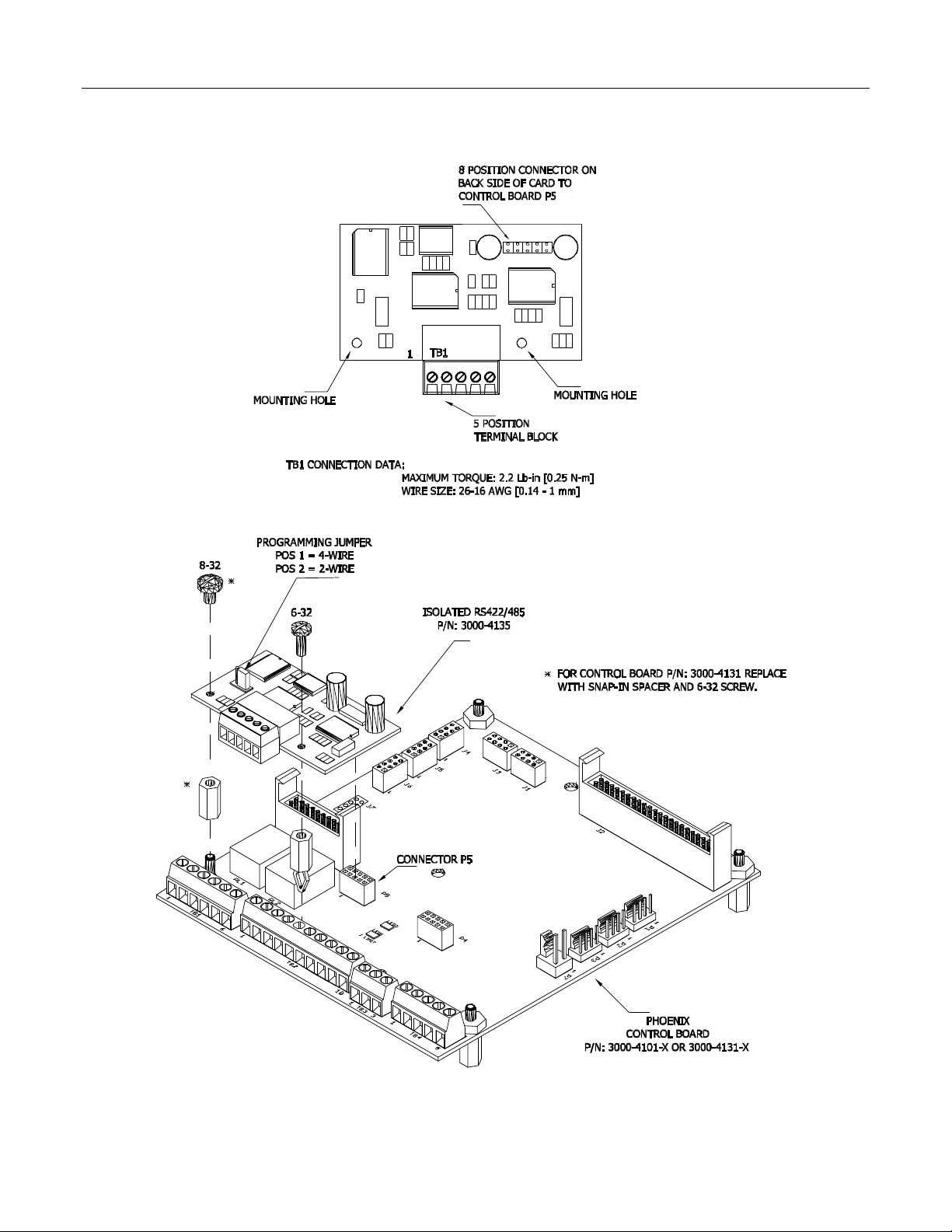
2-6 HARDWARE INTERFACE
Isolated Communication Card 3000-4135
Installation of Isolated RS-422/485 Board
(with Control Board 3000-4101 & 3000-4131)
Figure 2.6
Page 12
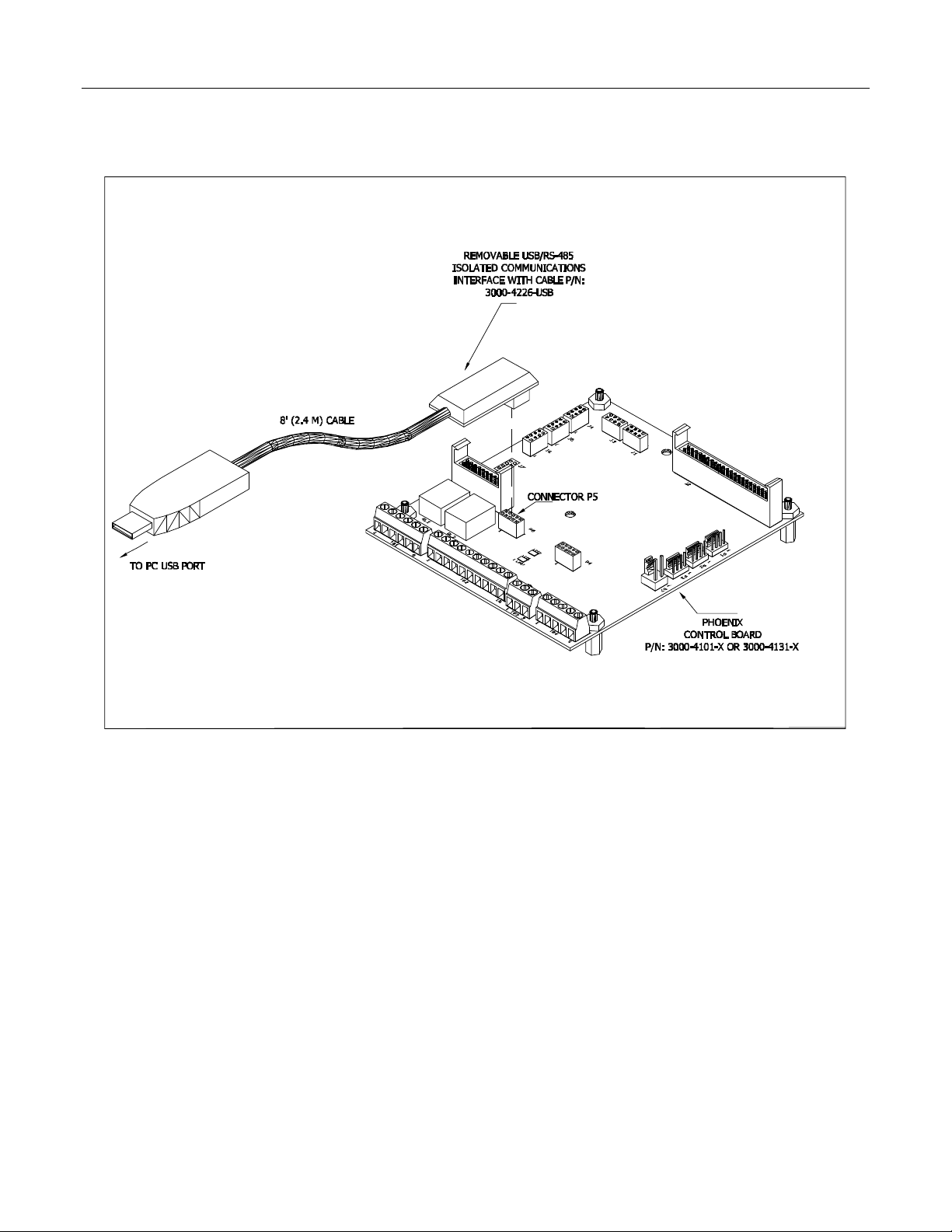
HARDWARE INTERFACE 2-7
Removable USB/RS-485 Isolated Communications Interface with Cable
P/N: 3000-4226-USB
Installation of Removable USB/RS-485 Isolated Communications Interface with Cable
P/N: 3000-4226-USB (with Control Board 3000-4101 & 3000-4131)
Figure 2.7
Page 13

2-8 HARDWARE INTERFACE
E
ND OF HARDWARE INTERFACE
Page 14
MODBUS RTV PROTOCAL DESCRIPTION 3- 1
3.0 MODBUS RTU PROTOCOL
DESCRIPTION
3.1 Introduction Modbus Protocol
The common language used by Phoenix AC Drives is
the Modbus protocol. This protocol defines a message
structure that Phoenix AC Drives will recognize and
use.
The Modbus protocol provides the internal standard
that the Phoenix AC Drives use for parsing messages.
During communications on a Modbus network, the
protocol determines how each drive will know its
device address, recognize a message addressed to it,
determine the kind of action to be taken, and extract
any data or other information contained in the
message. If a reply is required, the drive will
construct the reply message and send it using Modbus
protocol.
3.1.1 Transaction on Modbus Networks
Controllers communicate using a master-slave
technique, in which only one device (the master) can
initiate transactions (queries). The other devices (the
slaves) respond by supplying the requested data to
the master, or by taking the action requested in the
query. Typical master devices include host
processors. Typical slaves include Phoenix AC Drives.
The master can address individual slaves, or can
initiate a broadcast message to all slaves. Slaves
return a message (response) to queries that are
addressed to them individually. Responses are not
returned to broadcast queries from the master.
The Modbus protocol establishes the format for the
master’s query by placing into it the device (or
broadcast) address, a function code defining the
requested action, any data to be sent, and an errorchecking field. The slave’s response message is also
constructed using Modbus protocol. It contains fields
confirming the action taken, any data to be returned,
and an error-checking field. If an error occurred in
receipt of the message, or if the slave is unable to
perform the requested action, the slave will construct
an error message and send it as its response.
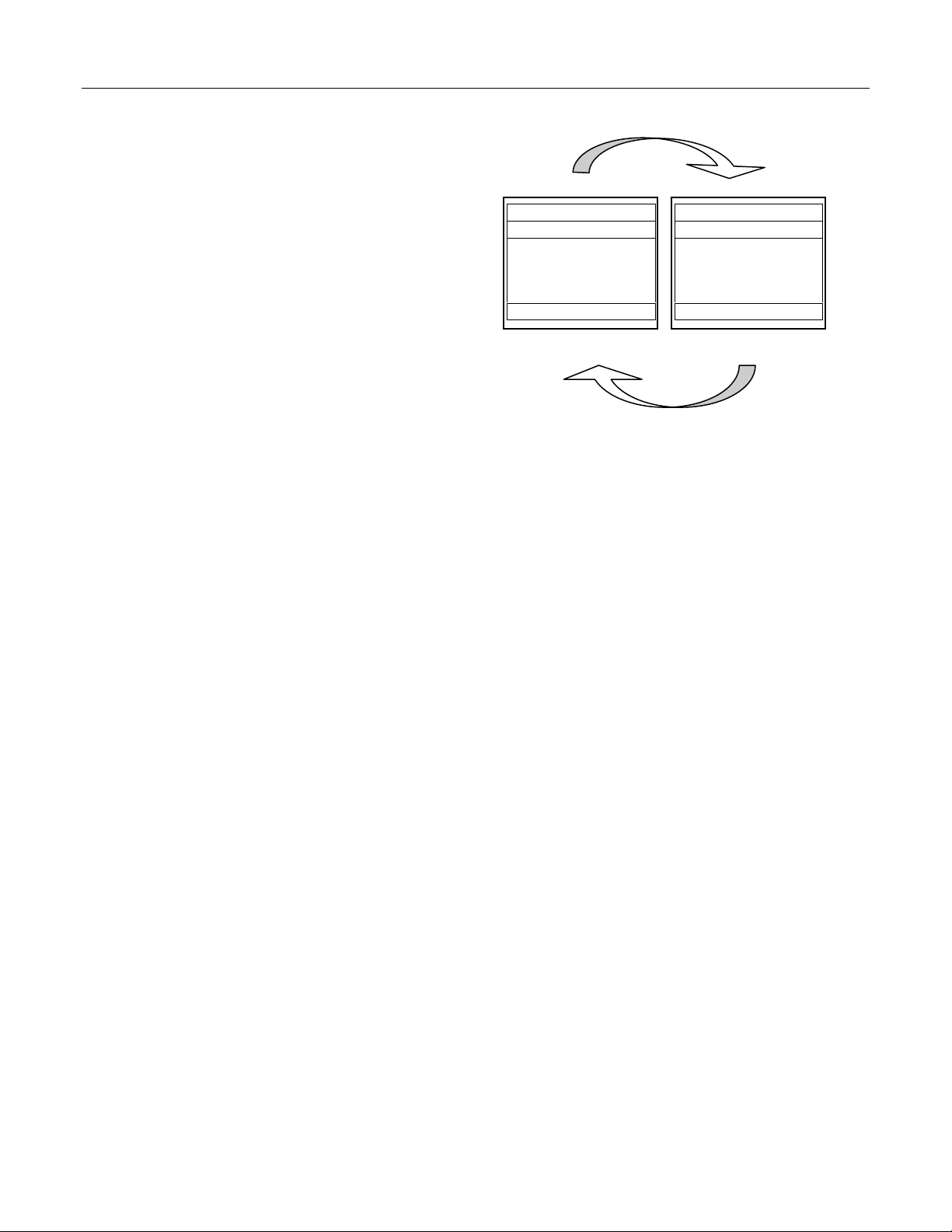
3.1.2 The Query-Response Cycle
Query message from master
Device Address
Function Code
Eight-Bit
Data Bytes
Error Check
Device Address
Function Code
Eight-Bit
Data Bytes
Error Check
Response message from slave
Master-Slave Query-Response Cycle
The Query
The function code in the query tells the addressed
slave device what kind of action to perform. The data
bytes contain any additional information that the slave
will need to perform the function. For example,
function code 03 will query the slave to read holding
registers and respond with their contents. The data
field must contain the information telling the slave
which register to start at and how many registers to
read. The error check field provides a method for the
slave to validate the integrity of the message contents.
The Response
If the slave makes a normal response, the function
code in the response is an echo of the function code in
the query. The data bytes contain the data collected
by the slave, such as register values or status. If an
error occurs, the function code is modified to indicate
that the response is an error response, and the data
bytes contain a code that describes the error. The
error check field allows the master to confirm that the
message contents are valid.
3.2 Two Serial Transmission Modes
Devices communicate on standard Modbus networks
using either of two transmission modes: ASCII or RTU.
Phoenix AC drives use RTU mode, but select the serial
port communication parameters (baud rate, parity
mode, etc.), during configuration of each drive. The
mode and serial parameters must be the same for all
devices on a Modbus network.
Page 15

3-2 MODBUS RTV PROTOCAL DESCRIPTION
3.2.1 RTU Mode
The Phoenix AC drive are setup to communicate on a
Modbus network using RTU (Remote Terminal Unit)
mode, each eight-bit byte in a message contains two
four-bit hexadecimal characters. The main advantage
of this mode is that its greater character density allows
better data throughput than ASCII for the same baud
rate. Each message must be transmitted in a
continuous stream.
Coding System
Eight-bit binary, hexadecimal 0…9, A…F
Two hexadecimal characters contained in each eight-
bit field of the message.
Bits per Byte
1 start bit
8 data bits, least significant bit sent first
1 bit for even/odd parity-no bit for no parity
1 stop bit if parity is used-2 bits if no parity
Error Check Field
Cyclical Redundancy Check (CRC)
3.2.2 ASCII Mode
The Phoenix AC drive does not incorporate ASCII
(American Standard Code for Information
Interchange) mode. But, if a device is using ASCII
mode, each eight-bit byte in a message is sent as two
ASCII characters. The main advantage of this mode is
that it allows time intervals of up to one second to
occur between characters without causing an error.
Coding System
Hexadecimal, ASCII characters 0… 9, A…F
One hexadecimal character contained in each ASCII
character of the message.
Bits per Byte
1 start bit
7 data bits, least significant bit sent first
1 bit for even/odd parity-no bit for no parity
1 stop bit if parity is used-2 bits if no parity
Error Check Field
Longitudinal Redundancy Check (LRC)
3.3 Modbus Message Framing
In either of the two serial transmission modes (ASCII
or RTU), a Modbus message is placed by the
transmitting device into a frame that has a known
beginning and ending point. This allows receiving
devices to begin at the start of the message, read the
address portion and determine which device is
addressed (or all devices, if the message is broadcast),
and to know when the message is completed. Partial
messages can be detected and errors can be set as a
result.
3.3.1 RTU Framing
In RTU mode, messages start with a silent interval of
at least 3.5 character times. This is most easily
implemented as a multiple of character times at the
baud rate that is being used on the network (shown as
T1 – T2 – T3 – T4 in the figure below). The first field
then transmitted is the device address.
The allowable characters transmitted for all fields are
hexadecimal 0…9, A…F. Networked devices
monitor the network bus continuously, including
during the silent intervals. When the first field (the
address field) is received, each device decodes it to
find out if it is the addressed device.
Following the last transmitted character, a similar
interval of at least 3.5 character times marks the end
of the message. A new message can begin after this
interval.
The entire message frame must be transmitted as a
continuous stream. If a silent interval of more than
1.5 character times occurs before completion of the
frame, the receiving device flushes the incomplete
message and assumes that the next byte will be the
address field of a new message.
Similarly, if a new message begins earlier that 3.5
character times following a previous message, the
receiving device will consider it a continuation of the
previous message. This will set an error, as the value
in the final CRC field will not be valid for the combined
messages. A typical message frame is shown below.
START ADDRESS FUNCTION
T1-T2-T3-T4 8 BITS 8 BITS NX 8BITS 16 BITS T1-T2-T3-T4
DATA
CRC
CHECK
END
Page 16

MODBUS RTV PROTOCAL DESCRIPTION 3- 3
3.3.2 ASCII Framing
In ASCII mode, which is not incorporated in Phoenix
AC drives, messages start with a colon (: character
(ASCII 3A hex), and end with a carriage return-line
feed (CRLF) pair (ASCII 0D and 0A hex).
The allowable characters transmitted for all other
fields are hexadecimal 0… 9, A… F. Networked
devices monitor the network bus continuously for the
colon character. When one is received, each device
decodes the next field (the address field) to find out if
it is the addressed device.
Intervals of up to one second can elapse between
characters within the message. If a greater interval
occurs, the receiving device assumes an error has
occurred. A typical message frame is shown below.
START
1
CHAR
:
SLAVE
ADDRESS
2
CHARS
FUNCTION DATA
2
CHARS N CHARS 2 CHARS
LRC
CHECK
END
2
CHARS
CRLF
3.3.3 How the Address Field is Handled
The address field of a message frame contains eight
bits (RTU). Valid slave device addresses are in the
range of 0…247 decimal. The individual slave devices
are assigned addresses in the range of 1…247. A
master addresses a slave by placing the slave address
in the address field of the message. When the slave
sends its response, it places its own address in this
address field of the response to let the master know
which slave is responding.
Address 0 is used for the broadcast address, which all
slave devices recognize. When Modbus protocol is
used on higher level networks, broadcasts may not be
allowed or may be replaced by other methods. For
example, Modbus Plus uses a shared global database
that can be updated with each token rotation.
3.3.4 How the Function Field is
Handled
The function code field of a message frame contains
eight bits (RTU). Valid codes are in the range of
1…255 decimal. Of these, some codes are applicable
to all Modicon controllers, while some codes apply only
to certain models, and others are reserved for future
use.
When a message is sent from a master to a slave
device the function code field tells the slave what kind
of action to perform. Examples are to read the
ON/OFF states of a group of discrete coils or inputs; to
read the data contents of a group of registers; to read
the diagnostic status of the slave; to write to
designated coils or registers; or to allow loading,
recording, or verifying the program within the slave.
When the slave responds to the master, it uses the
function code field to indicate either a normal (errorfree) response or that some kind of error occurred
(called an exception response). For a normal
response, the slave simply echoes the original function
code. For an exception response, the slave returns a
code that is equivalent to the original function code
with its most significant bit set to a logic 1.
For example, a message from master to slave to read
a group of holding registers would have the following
function code.
0000 0011 (Hexadecimal 03)
If the slave device takes the requested action without
error, it returns the same code in its response. If an
exception occurs, it returns:
1000 0011 (Hexadecimal 83)
In addition to its modification of the function code for
an exception response, the slave places a unique code
into the data field of the response message. This tells
the master what kind of error occurred, or the reason
for the exception.
The master device’s application program has the
responsibility of handling exception responses. Typical
processes are to post subsequent retries of the
message, to try diagnostic messages to the slave, and
to notify operators.
3.3.5 Contents of the Data Field
The data field is constructed using sets of two
hexadecimal digits, in the range of 00 to FF
hexadecimal. These can be made from one RTU
character.
The data field of messages sent from a master to
slave devices contains additional information, which
the slave must use to take the action defined by the
function code. This can include items like discrete and
register addresses, the quantity of items to be
handled, and the count of actual data bytes in the
field.
For example, if the master requests a slave to read a
group of holding registers (function code 03), the data
field specifies the starting register and how many
Page 17

3-4 MODBUS RTV PROTOCAL DESCRIPTION
registers are to be read. If the master writes to a
group of registers in the slave (function code 10
hexadecimal), the data field specifies the starting
register, how many registers to write, the count of
data bytes to follow in the data field, and the data to
be written into the registers.
If no error occurs, the data field of a response from a
slave to a master contains the data requested. If an
error occurs, the field contains and exception code
that the master application can use to determine the
next action to be taken.
The data field can be nonexistent (of zero length) in
certain kinds of messages. For example, in a request
from a master device for a slave to respond with its
communications event log (function code 0B
hexadecimal), the slave does not require any
additional information. The function code alone
specifies the action.
3.3.6 Contents of the Error Checking
Field
RTU Mode
When RTU mode is used for character framing, the
error checking field contains a 16-bit value
implemented as two eight-bit bytes. The error check
value is the result of a Cyclical Redundancy Check
calculation performed on the message contents.
The CRC field is appended to message as the last field
in the message. When this is done, the low-order
byte of the field is appended first, followed by the
high-order byte. The CRC high-order byte is the last
byte to be sent in the message.
3.3.7 How Characters are Transmitted
Serially
With RTU character framing, the bit sequence is:
Start
1 2 3 4 5 6 7 8
With Parity Checking
Par Stop
Without Parity Checking
Start
1 2 3 4 5 6 7 8
Stop Stop
Bit Order (RTU)
3.4 Error Checking Methods
Standard Modbus serial networks use two kinds of
error checking. Parity checking (even or odd) can be
optionally applied to each character. Frame checking
(LRC or CRC) is applied to the entire message. Both
the character check and message frame check are
generated in the master device and applied to the
message content before transmission. The slave
checks each character and the entire message frame
during receipt.
The master is configured by the used to wait for a
predetermined timeout interval before aborting the
transaction. This interval is set to be long enough for
any slave to respond normally. If the slave detects a
transmission error, the message will not be acted
upon. The slave will not construct a response to the
master. Thus the timeout will expire and allow the
master’s program to handle the error.
3.4.1 Parity Checking
Users can configure Phoenix AC drives for Even or Odd
Parity checking, or for No Parity checking. This will
determine how the parity bit will be set in each
character.
If either Even or Odd Parity is specified, the quantity
of 1 bit will be counted in the data portion of each
character (eight for RTU). The parity bit will then be
set to a 0 or 1 to result in an Even or Odd total of 1
bits. For example, these eight data bits are contained
in an RTU character frame:
1100 0101
The total quantity of 1 bits in the frame is four. If
Even Parity is used, the frame’s parity bit will be a 0,
making the total quantity of 1 bits still an even
number (four). If Odd Parity is used, the parity bit will
be a 1, making an odd quantity (five).
When the message is transmitted, the parity bit is
calculated and applied to the frame of each character.
The receiving device counts the quantity of 1 bits and
sets an error if they are not the same as configured
for that device (all devices on the Modbus network
must be configured to use the same parity check
method).
Note that Parity Checking can only detect an error if
an odd number of bits are picked up or dropped in a
character frame during transmission. For example, if
Odd Parity checking is employed, and two 1 bits are
dropped form a character containing three 1 bits, the
result is still an odd count of 1 bits.
Page 18

MODBUS RTV PROTOCAL DESCRIPTION 3- 5
If No Parity checking is specified, no parity bit is
transmitted and no parity check can be made. An
additional stop bit is transmitted to fill out the
character frame.
3.4.2 CRC Checking
In RTU mode, messages include an error-check field
that is based on a CRC method. The CRC field checks
the contents of the entire message. It is applied
regardless of any parity check method used for the
individual characters of the message.
The CRC field is two bytes, containing a 16-bit binary
value. The CRC value is calculated by the transmitting
device, which appends the CRC to the message. The
receiving device recalculates a CRC during receipt of
the message, and compares the calculated value to
the actual value it received in the CRC field. If the two
values are not equal, an error results.
The CRC is started by first preloading a 16-bit register
to all 1’s. Then a process begins of applying
successive eight-bits bytes of the message to the
current contents of the register. Only the eight bits of
data in each character are used for generating the
CRC. Start and stop bits, and the parity bit, do not
apply to the CRC.
During generation of the CRC, each eight-bit character
is exclusive ORed with the register contents. Then the
result is shifted in the direction of the least significant
bit (LSB), with a zero filled into the most significant bit
(MSB) position. The LSB is extracted and examined.
If the LSB was a 1, the register is then exclusive ORed
with a preset, fixed value. If the LSB was a 0, no
exclusive OR takes place.
This process is repeated until eight shifts have been
performed. After the last (eighth) shift, the next
eight-bit byte is exclusive ORed with the register’s
current value, and the process repeats for eight more
shifts as described above. The final contents of the
register, after all the bytes of the message have been
applied, is the CRC value.
When the CRC is appended to the message, the loworder byte is appended first, followed by the highorder byte.
Page 19

3-6 MODBUS RTV PROTOCAL DESCRIPTION
END OF MODBUS RTU PROTOCAL DESCRIPTION
Page 20

MODBUS TCP PROTOCOL DESCRIPTION 4-1
S
t
t
4.0 MODBUS TCP PROTOCAL DESCRIPTION
This section describes the general form of
encapsulation of Modbus request and response when
carried on the Ethernet network. It is important to
note that the structure of the request and response
body, from the slave address to the end of the data
portion, have exactly the same way out and meaning
as in the other Modbus variants.
4.1 Ethernet Frame
Ethernet
header
The above figure shows an Ethernet frame. The
message framing is encapsulated into the application
data of the Ethernet frame.
4.2 Modbus TCP Message Framing
MODBUS TCP HEADER MODBUS RTU FRAME
TRANSACTION
PROTOCOL
IDENTIFIER
IDENTIFIER
2x8 BITS
2x8 BITS
16 BITS
16 BIT
Figure 4.2 Encapsulation of Modbus RTU Frame in
IP
TCP
header
header
20 20 14 4
46 to 1500 bytes
application data
Ethernet Frame
Figure 4.1 Ethernet Frame
SLAVE ADDRESS
LENGTH
FIELD
2x8 BITS
16 BITS
Ethernet
header
14
8 BITS
IP
header
20 20
UNIT
IDENTIFIER
TCP
header
Ethernet Frame
46 to 1500 bytes
FUNCTION DATA
8 BITS NX8BITS
application data
Ethernet Frame as Modbus TCP
Etherne
trailer
Etherne
trailer
4
The Modbus RTU frame request and responses as
Modbus TCP message framing is inserted into
application data location. The Modbus RTU message
frame start, stop, and cRC are not included into the
Modbus TCP frame. A Modbus TCP header is added
and the slave address is replaced by a unit identifier.
The unit identifier is considered part of the header.
4.3 Modbus TCP Header Description
The Modbus TCP Header contains the following
fields:
Fields
Identifier
Protocol
Identifier
Length 2 Bytes Number of following bytes
Unit
Identifier
The header is 6 bytes long:
• Transaction Identifier – It is used for
• Protocol Identifier – It is used for intra-system
• Length – The length field is a byte count of the
• Unit Identifier – This field is used for intra-
All Modbus/TCP Message Frames are sent via TCP on
registered port 502.
Length
Description Client Server Contents
Identification of a MODBUS
2 Bytes
Request / Response
transaction
2 Bytes 0 = MODBUS protocol
Identification of a remote
1 Byte
slave connected on a serial
line or on other buses
Initialized by
the client
Initialized by
the client
Initialized by
the client
(request)
Initialized by
the client
Recopied by the
server from the
received request
Recopied by the
server from the
received request
Initialized by the
server
(Response)
Recopied by the
server from the
received request
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Usually
0 Transaction
Usually
0
0
0
0
Number
of Bytes
transaction pairing, the Modbus server copies in
the response the transaction identifier of the
request.
multiplexing. The Modbus protocol is identified
by the value 0.
Unit Identifier, Function Code, and Data Fields.
system routing purpose. It is typically used to
communicate to a Modbus serial line slave
through a gateway between an Ethernet TCP/IP
network and a Modbus serial line. This field is
set by the Modbus Client in the request and must
be returned with the same value in the response
by the server.
Page 21

4-2 MODBUS TCP PROTOCOL DESCRIPTION
t
4.4 Ethernet TCP Message Framing
The Modbus RTU frame request and response as
Ethernet TCP message frame is inserted into the
application data location. The Modbus RTU message
frame start and stop is not included into the Ethernet
TCP frame. The format is as shown.
SLAVE
ADDRESS
8 BITS 8 BITS
FUNCTION D A T A
NX8BITS
Modbus RTU Frame
Ethernet
header
14
IP
header
20
TCP
header
20
Ethernet Frame
46 to 1500 bytes
Figure 4.3 Encapsulation of Modbus RTU frame in
Ethernet frame as Ethernet TCP
CRC
CHECK
2x8 BITS
16 BITS
application data
Etherne
trailer
4
Page 22

MODBUS FUNCTION FORMATS 5-1
5.0 MODBUS FUNCTION FORMATS
5.1 Field Contents in Modbus Messages
The following tables show examples of a Modbus
query and normal response. Both examples show the
field contents in hexadecimal, and also show how a
message could be framed in RTU mode.
Query
Field Name
Header None
Slave Address 06 0000 0110
Function 03 0000 0011
Starting Address Hi 00 0000 0000
Starting Address Lo 6B 0110 1011
No. of Registers Hi 00 0000 0000
No. of Registers Lo 03 0000 0011
Error Check CRC (16 bits)
Trailer None
Total Bytes 8
Response
Field Name
Header None
Slave Address 06 0000 0110
Function 03 0000 0011
Byte Count 06 0000 0110
Data Hi 02 0000 0010
Data Lo 2B 0010 1011
Data Hi 00 0000 0000
Date Lo 00 0000 0000
Data Hi 00 0000 0000
Data Lo 63 0110 0011
Error Check
Trailer
Total Bytes 11
The master query is a Read Holding Registers request
to slave device address 06. The message requests
data from three holding registers, 40108…40110.
Note: The message specifies the starting register
address as 0107 (006B hex).
The slave response echoes the function code,
indicating this is a normal response. The Byte Count
field specifies how many eight-bit data items are being
returned. It shows the count of eight-bit bytes to
follow in the data.
How to Use the Byte Count Field
When you construct responses in buffers, use a Byte
Count value that equals the count of eightbit bytes in
your message data. The value is exclusive of all other
field contents, including the Byte Count field.
Example
(hex)
Example
(hex)
RTU 8-Bit Field
RTU 8-Bit Field
CRC (16 bits)
None
5.2 Function Codes
The listing below shows some function codes
supported by Modicon controllers.
Code Name
01 Read Coil Status
02 Read Input Status
03 Read Holding Registers
04 Read Input Registers
05 Force Single Coil
06 Preset Single Register
07 Read Exception Status
08 Diagnostics
Page 23

5-2 MODBUS FUNCTION FORMATS
END OF MODBUS FUNCTION FORMATS
Page 24

PHOENIX AC DRIVE FUNCTION FORMATS 6-
1
6.0 PHOENIX AC DRIVE FUNCTION FORMATS
6.1 Modbus USD Function Formats
The Phoenix AC drive supports five Modbus functions.
The drive Modbus function supports only one
parameter per query. Each response to the query
returns multiple bytes of information. A query’s a
non-existing function, the response will be an error.
Code
01 Read Coil Status Read Value Strings
03 Read Holding Register Read Parameter Value
04 Read Input Register Read Parameter Name
05 Force Single Coil Write Parameter Name
06 Preset Single Register Write Parameter Value
Function Code 01–Read Parameter Value Name
This function reads the parameter value name that
describes the specified parameter value on the
Phoenix drive. This is for only parameters that have
names for values. The value name can be 9 or 16
characters. Broadcast is not supported.
Query
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 01
Starting Address Hi Menu Number 0B
Starting Address Lo Parameter Number 19
Number of Points Hi Parameter Value Hi 00
Number of Points Lo Parameter Value Lo 01
CRC Lo CRC Lo 2E
CRC Hi CRC Hi 29
Response
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 01
Byte Count Byte Count 09
Data 1 Hi
Data 1 Lo
Data 2 Hi
Data 2 Lo
Data 3 Hi
Data 3 Lo
Data 4 Hi
Data 4 Lo
Data 5 Hi
CRC Lo CRC Lo 3F
CRC Hi CRC Hi 46
The example above is reading drive 1 parameter
M11P25 value name for value of 1. The response is
“9600 BAUD”.
Function Code 03 – Read Parameter Value
This function reads the data value and decimal point
position of the specified parameter on the Phoenix
drive. Broadcast is not supported.
Modbus
Function
Parameter Name Char 1
Parameter Name Char 2
Parameter Name Char 3
Parameter Name Char 4
Parameter Name Char 5
Parameter Name Char 6
Parameter Name Char 7
Parameter Name Char 8
Parameter Name Char 9
Phoenix
Format
Phoenix
Format
Phoenix
Function
Example
Example
39
36
30
30
20
42
41
55
44
Query
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 03
Starting Address Hi Menu Number 05
Starting Address Lo Parameter Number 09
Number of Points Hi Don’t Care 00
Number of Points Lo Don’t Care 00
CRC Lo CRC Lo 95
CRC Hi CRC Hi 04
Phoenix
Format
Example
Response
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 03
Byte Count Byte Count 03
Data 1 Hi Parameter Value Hi 02
Data 1 Lo Parameter Value Lo 58
Data 2 Hi
CRC Lo CRC Lo 1E
CRC Hi CRC Hi 4E
Phoenix
Format
Decimal Point Location
Example
01
The example above is reading drive 1 parameter
M05P09 BASE MOTOR FREQ. The response is 60.0
hertz.
Decimal point is to the right 1 position:
0258 Hex 600 Decimal 60.0 Hertz
When the parameter has a text string for value (ex.
MODBUSUSD), the data value, decimal point, and
parameter name value will be return.
Query
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 03
Starting Address Hi Menu Number 0B
Starting Address Lo Parameter Number 1A
Number of Points Hi Don’t Care 00
Number of Points Lo Don’t Care 00
CRC Lo CRC Lo 66
CRC Hi CRC Hi 29
Phoenix
Format
Example
Response
Modbus
Format
Slave Address Dri ve Address 01
Function Code Function Code 03
Byte Count Byte Count 0C
Data 1 Hi
Data 1 Lo
Data 2 Hi
Data 2 Lo
Data 3 Hi
Data 3 Lo
Data 4 Hi
Data 4 Lo
Data 5 Hi
Data 5 Lo
Data 6 Hi
Data 6 Lo
CRC Lo CRC Lo 84
CRC Hi CRC Hi EE
Phoenix
Format
Parameter Value Hi
Parameter Value Lo
Decimal Point Location
Parameter Name Char 1
Parameter Name Char 2
Parameter Name Char 3
Parameter Name Char 4
Parameter Name Char 5
Parameter Name Char 6
Parameter Name Char 7
Parameter Name Char 8
Parameter Name Char 9
Example
00
00
00
4D
4F
44
42
55
53
55
53
44
Page 25

6-2 PHOENIX AC DRIVE FUNCTION FORMATS
The example above is reading drive 1 parameter
M11P26 SERIAL PROTOCOL. The response is
MODBUSUSD.
Decimal point is to the right 0 position:
0 Hex 0 Decimal 0 = MODBUSUSD
Query
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 03
Starting Address Hi Menu Number 01
Starting Address Lo Parameter Number 39
Number of Points Hi Don’t Care 00
Number of Points Lo Don’t Care 00
CRC Lo CRC Lo 94
CRC Hi CRC Hi 3B
Phoenix
Format
Example
Response
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 03
Byte Count Byte Count 05
Data 1 Hi Parameter Value Hi 1 EA
Data 1 Lo Parameter Value Lo 1 60
Data 2 Hi
Data 2 Lo Parameter Value Hi 2 00
Data 3 Hi Parameter Value Lo 2 00
CRC Lo CRC Lo 45
CRC Hi CRC Hi 45
Phoenix
Format
Decimal Point Location
Example
03
The example above is reading drive 1 parameter
M01P57 PRECIS FREQ REF2. This is 32-Bit integer
which is supported on DS, ES, and LS series only. The
response is 60.000 hertz.
Decimal point is to the right 3 position:
0000 EA60 HEX → 60000 Decimal → 60.000 hertz.
Function Code 04 – Read Parameter Name
This function reads the parameter name that describes
the specified parameter on the Phoenix drive.
Broadcast is not supported.
Query
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 04
Starting Address Hi Menu Number 05
Starting Address Lo Parameter Number 09
Number of Points Hi Don’t Care 00
Number of Points Lo Don’t Care 00
CRC Lo CRC Lo 20
CRC Hi CRC Hi C4
Phoenix
Format
Example
Response
Modbus
Format
Slave Address Dri ve Address 01
Function Code Function Code 04
Byte Count Byte Count 10
Data 1 Hi
Data 1 Lo
Data 2 Hi
Data 2 Lo
Data 3 Hi
Data 3 Lo
Data 4 Hi
Data 4 Lo
Data 5 Hi
Data 5 Lo
Data 6 Hi
Data 6 Lo
Data 7 Hi
Data 7 Lo
Data 8 Hi
Data 8 Lo
CRC Lo CRC Lo 52
CRC Hi CRC Hi D1
The example above is reading drive 1 parameter
M05P09 name. The response is “BASE MOTOR FREQ”.
Function Code 05 – Write Parameter Name
This function writes a character in the specified
character position for parameter name. The
parameter name is only for value of 1 on parameter
M11P31 or M11P32. Broadcast is not supported.
Query
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 05
Coil Address Hi Menu Number 0B
Coil Address Lo Parameter Number 1F
Force Data Hi Character Number 02
Force Data Lo Character Value 55
CRC Lo CRC Lo 3F
CRC Hi CRC Hi 77
Response
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 05
Coil Address Hi Menu Number 0B
Coil Address Lo Parameter Number 1F
Force Data Hi Character Number 02
Force Data Lo Character Value 55
CRC Lo CRC Lo 3F
CRC Hi CRC Hi 77
This example above is writing the character “U” in
position 3 on parameter M11P31 text for value 1.
Phoenix
Format
Parameter Name Char 1
Parameter Name Char 2
Parameter Name Char 3
Parameter Name Char 4
Parameter Name Char 5
Parameter Name Char 6
Parameter Name Char 7
Parameter Name Char 8
Parameter Name Char 9
Parameter Name Char 10
Parameter Name Char 11
Parameter Name Char 12
Parameter Name Char 13
Parameter Name Char 14
Parameter Name Char 15
Parameter Name Char 16
Phoenix
Format
Phoenix
Format
Example
42
41
53
45
20
4D
4F
54
4F
52
20
46
52
45
51
20
Example
Example
Page 26

PHOENIX AC DRIVE FUNCTION FORMATS 6-
3
Function Code 06 – Write Parameter Value
This function writes the data value to the specified
parameter of the Phoenix drive. Broadcast is
supported.
Query
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 06
Register Address Hi Menu Number 05
Register Address Lo Parameter Number 09
Preset Data Hi Data Value Hi 02
Preset Data Lo Data Value Lo 4E
CRC Lo CRC Lo D8
CRC Hi CRC Hi 50
Response
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 06
Register Address Hi Menu Number 05
Register Address Lo Parameter Number 09
Preset Data Hi Data Value Hi 02
Preset Data Lo Data Value Lo 4E
CRC Lo CRC Lo D8
CRC Hi CRC Hi 50
This example above is writing data value 59.0 Hertz to
parameter M05P09.
Query
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 06
Register Address Hi Menu Number 01
Register Address Lo Parameter Number 39
Preset Data Hi Data Value Hi 1 42
Preset Data Lo Data Value Lo 1 40
Data Value Hi 2 00
Data Value Lo 2 0F
CRC Lo CRC Lo 2F
CRC Hi CRC Hi BB
Response
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 06
Register Address Hi Menu Number 01
Register Address Lo Parameter Number 39
Preset Data Hi Data Value Hi 1 42
Preset Data Lo Data Value Lo 1 40
Data Value Hi 2 00
Data Value Lo 2 0F
CRC Lo CRC Lo D8
CRC Hi CRC Hi 50
This example above is writing data value 1000.000
hertz to parameter M01P57. This is a 32-Bit integer
which is supported on DS, ES and LS series only.
Phoenix
Format
Phoenix
Format
Phoenix
Format
Phoenix
Format
Example
Example
Example
Example
6.2 Modbus RTU Function Formats
The Phoenix AC drive supports three Modbus
functions. The drive Modbus write function supports
only one parameter per query. The drive Modbus read
function supports multiple parameters per query. A
query’s a non-existing function, the response will be
an error.
Code
03 Read Multiple Register Read Parameter Value
06 Preset Single Register W rite Parameter Value
16 Preset Multiple Register Write Parameter Value
Function Code 03 – Read Parameter Value
This function reads the data value the specified
parameters on the Phoenix drive. Up to a maximum of
sixteen parameter values can be returned in the
response. Broadcast is not supported.
Query
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 03
Starting Address Hi Menu Number 05
Starting Address Lo Parameter Number 08
Number of Points Hi
Number of Points Lo
CRC Lo CRC Lo 84
CRC Hi CRC Hi C5
Response
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 03
Byte Count Byte Count 06
Data 1 Hi Parameter 1 Value Hi 02
Data 1 Lo Parameter 1 Value Lo 3F
Data 2 Hi Parameter 2 Value Hi 02
Data 2 Lo Parameter 2 Value Lo 58
Data 3 Hi Parameter 3 Value Hi 00
Data 3 Lo Parameter 3 Value Lo 01
CRC Lo CRC Lo 75
CRC Hi CRC Hi 39
The example above is reading drive 1 parameter
M05P08 BASE MOTOR VOLT, M05P09 BASE MOTOR
FREQ, M05P10 NUMBER OF POLES. The response is
575 volts, 60.0 hertz, 4 poles.
Decimal point is to the right 0 position:
023F Hex 575 Decimal 575 Volts
Decimal point is to the right 1 position:
0258 Hex 600 Decimal 60.0 Hertz
Decimal point is to the right 0 position:
0001 Hex 1 Decimal 4 Poles
Modbus
Function
Phoenix
Format
Number of Parameters Hi
Number of Parameters Lo
Phoenix
Format
Phoenix
Function
Example
00
03
Example
Page 27

6-4 PHOENIX AC DRIVE FUNCTION FORMATS
Query
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 03
Starting Address Hi Menu Number 01
Starting Address Lo Parameter Number 39
Number of Points Hi
Number of Points Lo
CRC Lo CRC Lo 15
CRC Hi CRC Hi FA
Phoenix
Format
Number of Parameters Hi
Number of Parameters Lo
Example
00
02
Response
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 03
Byte Count Byte Count 04
Data 1 Hi Parameter 1 Value Hi EA
Data 1 Lo Parameter 1 Value Lo 60
Data 2 Hi Parameter 2 Value Hi 00
Data 2 Lo Parameter 2 Value Lo 00
CRC Lo CRC Lo CE
CRC Hi CRC Hi 35
Phoenix
Format
Example
The example above is reading drive 1 parameter
M01P57 PRECIS FREQ REF2. This is 32-Bit integer
which is supported on DS, ES, and LS series only. The
response is 60.000 hertz.
0000 EA60 Hex → 60000 Decimal → 60.000 hertz.
Function Code 06 – Write Parameter Value
This function writes the data value to the specified
parameter of the Phoenix drive. Broadcast is
supported.
Query
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 06
Register Address Hi Menu Number 05
Register Address Lo Parameter Number 09
Preset Data Hi Data Value Hi 02
Preset Data Lo Data Value Lo 4E
CRC Lo CRC Lo D8
CRC Hi CRC Hi 50
Phoenix
Format
Example
Response
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 06
Register Address Hi Menu Number 05
Register Address Lo Parameter Number 09
Preset Data Hi Data Value Hi 02
Preset Data Lo Data Value Lo 4E
CRC Lo CRC Lo D8
CRC Hi CRC Hi 50
Phoenix
Format
Example
This example above is writing data value 59.0 Hertz to
parameter M05P09.
Function Code 16 – Write Parameter Value
This function writes the data value to the specified
parameter of the Phoenix Drive. Broadcast is
supported.
Query
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 10
Starting Address Hi Menu Number 05
Starting Address Lo Parameter Number 09
Number of Register Hi
Number of Register Lo
Byte Count Byte Count 02
Data 1 Hi Parameter Value Hi 00
Data 1 Lo Parameter Value Lo 64
CRC Lo CRC Lo F2
CRC Hi CRC Hi 22
Response
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 10
Starting Address Hi Menu Number 05
Starting Address Lo Parameter Number 09
Number of Register Hi Don’t Care 00
Number of Register Lo Don’t Care 01
CRC Lo CRC Lo D1
CRC Hi CRC Hi 07
This example above is writing data value 10.0 Hertz to
parameter M05P09.
Query
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 10
Starting Address Hi Menu Number 01
Starting Address Lo Parameter Number 39
Number of Register Hi
Number of Register Lo
Byte Count Byte Count 04
Data 1 Hi Parameter Value Hi 1 42
Data 1 Lo Parameter Value Lo 1 40
Data 2 Hi Parameter Value Hi 2 00
Data 2 Lo Parameter Value Lo 2 0F
CRC Lo CRC Lo 68
CRC Hi CRC Hi E9
Response
Modbus
Format
Slave Address Drive Address 01
Function Code Function Code 10
Starting Address Hi Menu Number 01
Starting Address Lo Parameter Number 39
Number of Register Hi Don’t Care 00
Number of Register Lo Don’t Care 02
CRC Lo CRC Lo 90
CRC Hi CRC Hi 37
The example above is writing data value 1000.000
hertz to parameter M01P57. This is 32-Bit integer
which is supported on DS, ES, and LS series only.
Phoenix
Format
Number of Parameters Hi
Number of Parameters Lo
Phoenix
Format
Phoenix
Format
Number of Parameters Hi
Number of Parameters Lo
Phoenix
Format
Example
00
01
Example
Example
00
02
Example
Page 28

PHOENIX AC DRIVE FUNCTION FORMATS 6-
5
6.3 Modbus USD Alternate Function
Formats
When in Modbus RTU protocol mode, you can use
Modbus USD function formats by adding 64 (0x40
hex) to the function code.
Code
65 Read Value Strings
67 Read Parameter Value
68 Read Parameter Name
69 Write Parameter Name
70 Write Parameter Value
Function Code 67 - Read Parameter Value
This function reads the data value and decimal point
position of the specified parameter on the Phoenix
drive. Broadcast is not supported.
Query
Phoenix
Format
Drive Address 01
Function Code 43
Menu Number 05
Parameter Number 09
Don’t Care 00
Don’t Care 00
CRC Lo 94
CRC Hi CB
Response
Phoenix
Format
Drive Address 01
Function Code 43
Byte Count 03
Parameter Value Hi 02
Parameter Value Lo 58
Decimal Point Location 01
CRC Lo 1F
CRC Hi 81
The example above is reading drive 1 parameter
M05P09 BASE MOTOR FREQ. The response is 60.0
hertz.
Decimal point is to the right 1 position:
0258 Hex 600 Decimal 60.0 Hertz
Phoenix
Function
Example
Example
Page 29

6-6 PHOENIX AC DRIVE FUNCTION FORMATS
END OF PHOENIX AC DRIVE FUNCTION FORMATS
Page 30

7.0 EXCEPTION RESPONSES
Except for broadcast messages, when a master device
sends a query to a slave device it expects a normal
response. One of four possible events can occur from
the master’s query:
If the slave device receives the query without a
communication error, and can handle the query
normally, it returns a normal response.
If the slave does not receive the query due to a
communication error, no response is returned. The
master program will eventually process a timeout
condition for the query.
If the slave receives the query, but detects a
communication error (parity or CRC), no response is
returned. The master program will eventually process
a timeout condition for the query.
If the slave receives the query without a
communication error, but cannot handle it (for
example, if the request is to read a nonexistent coil or
register), the slave will return an exception response
informing the master of the nature of the error.
The exception response message has two fields that
differentiate it from a normal response.
Function Code Field
In a normal response, the slave echoes the function
code of the original query in the function code field of
the response. All function codes have a most
significant bit (MSB) of 0 (their values are all below 80
hexadecimal). In an exception response, the slave
sets the MSB of the function code to 1. This makes
the function code value in an exception response
exactly 80 hexadecimal higher than the value would
be for a normal response.
With the function code’s MSB set, the master’s
application program can recognize the exception
response and can examine the data field for the
exception code.
Data Field
In a normal response, the slave may return data or
statistics in the data field (any information that was
requested in the query). In an exception response,
the slave returns an exception code in the data field.
This defines the slave condition that caused the
exception. Here is an example of a master query and
EXCEPTION RESPONSE 7-1
slave exception response. The field examples are
shown in hexadecimal.
Query
Byte Contents Example
1 Slave Address 01
2 Function 03
3 Starting Address Hi 04
4 Starting Address Lo A1
5 Number of Points Hi 00
6 Number of Points Lo 01
7 CRC Lo D4
8 CRC Hi D8
Exception Response
Byte Contents Example
1 Slave Address 01
2 Function 83
3 Exception Code 02
4 CRC Lo C0
5 CRC Hi F1
In this example, the master addresses a query to slave
device 01. The function code (03) is for a Read
Holding Resister operation. It requests the contents
of the holding resister at address 1245 (04A1 hex).
If the holding resister address is nonexistent in the
slave device, the slave will return the exception
response with the exception code shown (02). This
specifies an illegal data address for the slave.
7.1 Exception Codes
Code Name
01 ILLEGAL FUNCTION
02 ILLEGAL DATA ADDRESS
03 ILLEGAL DATA VALUE
04 SLAVE DEVICE FAILURE
05 ACKNOWLEDGE
06 SLAVE DEVICE BUSY
07 NEGATIVE ACKNOWLEDGE
08 MEMORY PARITY ERROR
The Phoenix AC drive exception response uses some
of the existing Modbus exception codes and also has
three new exception codes. The Modbus RTU Protocol
only uses exception codes 01, 02 and 03.
Exception
Code
01 Illegal Function Illegal Function
02 Illegal Data
03 Illegal Data
10 N/A Bad CRC
11 N/A More data needed for valid
12 N/A To much data needed for
Modbus
Name
Address
Value
Phoenix
Name
Invalid Menu and/or
Parameter Number
Illegal Data Value (Invalid
Data, Read Only, Value
Out of Range, Drive
Running, Ect.)
message
valid message
Page 31

7-2 EXCEPTION RESPONSE
END OF EXCEPTION RESPONSE
Page 32

8.0 CRC GENERATION
The Cyclical Redundancy Check (CRC) field is two
bytes, containing a 16-bit binary value. The CRC
value is calculated by the transmitting device, which
appends the CRC to the message. The receiving
device recalculates a CRC during receipt of the
message, and compares the calculated value to the
actual value it received in the CRC field. If the two
values are not equal, an error results.
The CRC is started by first preloading a 16-bit register
to all 1’s. Then a process begins of applying
successive eight-bit bytes of the message to the
current contents of the register. Only the eight bits of
data in each character are used for generating the
CRC. Start and stop bits, and the parity bit, do not
apply to the CRC.
During generation of the CRC, each eight-bit character
is exclusive ORed with the register contents. The
result is shifted in the direction of the least significant
bit (LSB), with a zero filled into the most significant bit
(MSB) position. The LSB is extracted and examined.
If the LSB was a 1, the register is then exclusive ORed
with a preset, fixed value. If the LSB was a 0, no
exclusive OR takes place.
This process is repeated until eight shifts have been
performed. After the last (eighth) shift, the next
eight-bit character is exclusive ORed with the
register’s current value, and the process repeats for
eight more shifts as described above. The final
contents of the register, after all the characters of the
message have been applied, is the CRC value.
Generating a CRC
Step 1 Load a 16-bit register with FFFF hex (all 1’s).
Call this the CRC register.
Step 2 Exclusive OR the first eight-bit byte of the
message with the low order byte of the 16-bit CRC
register, putting the result in the CRC register.
Step 3 Shift the CRC register on bit to the right
(toward the LSB), zerofilling the MSB. Extract and
examine the LSB.
Step 4 If the LSB is 0, repeat Step 3 (another shift).
If the LSB is 1, Exclusive OR the CRC register with the
polynomial value A001 hex (1010 0000 0000 0001).
CRC GENERATION 8-1
Step 5 Repeat Steps 3 and 4 until eight shifts have
been performed. When this is done, a complete eightbit byte will have been processed.
Step 6 Repeat Steps 2…5 for the next eight-bit byte
of the message. Continue doing this until all bytes
have been processed.
Result The final contents of the CRC register is the
CRC value.
Step 7 When the CRC is placed into the message, its
upper and lower bytes must be swapped as described
below.
Placing the CRC into the Message
When the 16-bit CRC (two eight-bit bytes) is
transmitted in the message, the low order byte will be
transmitted first, followed by the high order byte-e.g.,
if the CRC value is 1241 hex (0001 0010 0100 0001):
Addr
41 12
CRC Byte Sequence
Example
An example of a C language function performing CRC
generation is shown on the following pages. All of the
possible CRC values are preloaded into two arrays,
which are simply indexed as the function increments
through the message buffer. One array contains all of
the 256 possible CRC values for the high byte of the
16-bit CRC field, and the other array contains all of the
values for the low byte,
Indexing the CRC in this way provides faster execution
than would be achieved by calculating a new CRC
value with each new character from the message
buffer.
Note: This function performs the swapping of the
high/low CRC bytes internally. The bytes are already
swapped in the CRC value that is returned from the
function. Therefore the CRC value returned from the
function can be directly placed into the message for
transmission.
Func
Data
Data Data Data Data
Count
CRC
Lo
CRC
Hi
Page 33

8-2 CRC GENERATION
The function takes two arguments:
unsigned char puchMsg; /* A pointer to the message buffer */
unsigned short usDataLen; /* The quantity of bytes in the message buffer */
The function returns the CRC as a type unsigned short.
CRC Generation Function
unsigned short CRC16 (puchMsg, usDataLen)
unsigned char *puchMsg; /* message to calculate CRC upon */
unsigned short usDataLen; /* quantity of bytes in message */
{
unsigned char uchCRCHi = 0xFF; /* high CRC byte initialized */
unsigned char uchCRCLo = 0xFF; /* low CRC byte initialized */
unsigned uIndex; /* will index into CRC lookup */
while( usDataLen--) /* pass through message buffer */
{
uIndex = uchCRCHi ^ *puchMsg++; /* calculate the CRC */
uchCRCHi = uchCRCLo ^ auchCRCHi[ uIndex};
uchCRCLo = auchCRCLo[ uIndex];
}
return( uchCRCHi << 8 | uchCRCLo);
}
Page 34

CRC GENERATION 8-3
High Order Byte Table
/* Table of CRC values for high-order byte */
static unsigned char auchCRCHi [ ] =
{
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, ox41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xc0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40
};
Page 35

8-4 CRC GENERATION
Low Order Byte Table
/* Table of CRC values for low-order byte */
static unsigned char auchCRCLo [ ] =
{
0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, oxC2, 0xC6, 0x06,
0x07, 0xC7, 0x05, 0xC5, 0xC4, 0x04, 0xCC, 0x0C, 0x0D, 0xCD,
0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09,
0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A,
0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC, 0x14, 0xD4,
0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3,
0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3,
0xF2, 0x32, 0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4,
0x3C, 0xFC, 0xFD, 0x3D, 0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A,
0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38, 0x28, 0xE8, 0xE9, 0x29,
0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF, 0x2D, 0xED,
0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,
0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60,
0x61, 0xA1, 0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67,
0xA5, 0x65, 0x64, 0xA4, 0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F,
0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68,
0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA, 0xBE, 0x7E,
0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5,
0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71,
0x70, 0xB0, 0x50, 0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92,
0x96, 0x56, 0x57, 0x97, 0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C,
0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E, 0x5A, 0x9A, 0x9B, 0x5B,
0x99, 0x59, 0x58, 0x98, 0x88, 0x48, 0x49, 0x89, 0x4B, 0x8B,
0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,
0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42,
0x43, 0x83, 0x41, 0x81, 0x80, 0x40
};
Page 36

9.0 PARAMETER CONVERSION
9.1 Parameter Coding Format
The Modbus Format for a 16-bit register address is
sent as two hexadecimal bytes. The register address
Hi is the two digit Menu number and register
address Lo is the two digit Parameter number. The
example below shows M12P05 parameter coded into
the Menu Number and Parameter Number for
Phoenix drive. The Menu number 12 decimal is
converted into a one byte (two digit representation)
0C hexadecimal. The Parameter number 5 decimal is
converted into a one byte (two digit representation)
05 hexadecimal.
Modbus
Format
Register Address Hi Menu Number 0C
Register Address Lo Parameter Number 05
Phoenix
Format
Example
9.2 Parameter to Register Address
Conversion
The US Drives Phoenix two digit Menu number and
Parameter number sometimes needs to be
converted to a register address in third party
software programs. The conversion formula is:
(Menu Number * 256) + Parameter Number =
Register Address
Examples:
M05P06
(5 * 256) + 6 = 1280 + 6 = 1286
0506 Hex Æ 1286 Decimal
M12P05
(12 * 256) + 5 = 3072 + 5 = 3077
0C05 Hex Æ 3077 Decimal
M06P41
(6 * 256) + 41 = 1536 + 41 = 1577
0629 Hex Æ 1577 Decimal
M17P19
(17 * 256) + 19 = 4352 + 19 = 4371
1113 Hex Æ 4371 Decimal
PARAMETER CONVERSION 9-1
Page 37

9-2 PARAMETER CONVERSION
END OF PARAMETER CONVERSION
Page 38

APPENDIX / BASIC TCP/IP DESCRIPTION A-1
1.0 INTRODUCTION
1.1 Introduction
Connectivity is required either too exchange billing
information or business data, or to facilitate remote
process and/or machine control. For almost everyone,
the TCP/IP is now the core technology for this
connectivity. For many, TCP/IP is now the technology
of choice for all data transfers, including both video
and voice.
The TCP/IP protocol suite allows computers of all
sizes, from many different computer vendors, running
totally different operating systems, to communicate
with each other. TCP/IP stands for Transaction
Control Protocol and Internet Protocol. Actually,
thought, TCP/IP is a complete protocol suite which
includes these protocols, as well as others.
What started in the late 1960’s as a governmentfinanced research project into packet switching
networks has, in the 1990’s, turned into the most
widely used form of networking between computers.
It is truly an open system in that the definition of the
protocol suite and many of its implementations are
publicly available at little charge or no charge. It
forms the basis for what is called the worldwide
Internet, or the Internet, a wide area network (WAN)
of more than one million computers that literally spans
the globe.
This section provides an overview of the TCP/IP
protocol suite.
1.2 Layering
Networking protocols are normally developed in
layers, with each layer responsible for a different facet
of the communications. A protocol suite, such as
TCP/IP, is the combination of different protocols at
various layers. TCP/IP is normally considered to be a
4-layer system.
Application Telnet, TFP, e-mail, etc.
Transport TCP, UDP
Network IP, ICMP, IGMP
Link device driver and interface card
Figure A.1 The four layers of the TCP/IP protocol
suite
Each layer has a different responsibility.
1. The link layer, sometimes called the data-link
layer or network interface layer, normally
includes the device driver in the operating
system and the corresponding network
interface cad in the computer. Together they
handle all the hardware details of physically
interfacing with the cable (or whatever type
of media is being used).
2. The network layer (sometimes called the
internet layer) handles the movement of
packets around the network. Routing of
packets, for example, takes place here. IP
(Internet Protocol), ICMP (Internet Control
Message Protocol), and IGMP (Internet
Group Management Protocol) provide the
network layer in the TCP/IP protocol suite.
3. The transport layer provides a flow of data
between two hosts, for the application layer
above. In the TCP/IP protocol suite there
are two vastly different transport protocols:
TCP (Transmission Control Protocol) and UDP
(User Datagram Protocol).
TCP provides a reliable flow of data between
two hosts. It is concerned with things such
as dividing the data passed to it from the
application into appropriately sized chunks
for the network layer below, acknowledging
received packets, setting timeouts to make
certain the other end acknowledges packets
that are sent, and so on. Because this
reliable flow of data is provided by the
transport layer, the application layer can
ignore all these details.
UDP, on the other hand, provides a much
simpler service to the application layer. It
just sends packets of data called datagrams
from one host to the other, but there is no
guarantee that the datagrams reach the
other end. Any desired reliability must be
added by the application layer.
4. The application layer handles the details of
the details of the particular application.
There are many common TCP/IP applications
that almost every implementation provides:
• Telnet for remote login,
• FTP, the File Transfer Protocol,
• SMTP, the Simple Mail Transfer
Protocol, for electronic mail,
• SNMP, the Simple Network
Management Protocol,
• And many moreIf we have two hosts
on a local area network (LAN) such as
Page 39

A-2 APPENDIX / BASIC TCP/IP DESCRIPTION
T
t
an Ethernet, both running FTP, Figure
1.2 shows the protocols involved.
application
FTP
client
FTP protocol
FTP
server
user
processes
handles
application
details
transport
network
TCP TCP
IP
TCP protocol
IP protocol
kernel
IP
handles
communication
details
link
Ethernet
driver
Ethernet protocol
Ethernet
driver
Figure A.2 Two hosts on a LAN running FTP
We have labeled one application box the FTP client and
the other the FTP server. Most network applications are
designed so that one end is the client and the other side
the server. The server provides some type of service to
clients, in this case access to files on the server host.
Each layer has one or more protocols for communicating
with its peer at the same layer. One protocol, for
example, allows the two TCP layers to communicate, and
another protocol lets the two IP layers communicate.
On the right side of Figure 1.2 we have noted that
normally the application layer is a user process while the
lower three layers are usually implemented in the kernel
(the operating system).
There is another critical difference between the top layer
in Figure 1.2 and the lower three layers. The application
layer is concerned with the details of the application and
not with the movement of data across the network. The
lower three layers know nothing about the application
but handle all the communication details.
We show four protocols in Figure 1.2, each at a different
layer. FTP is an application layer protocol, TCP is a
transport layer protocol, IP is a network layer protocol,
and the Ethernet protocols operate at the link layer. The
TCP/IP protocol suite is a combination of many protocols.
Although the commonly used name for the entire
protocol suite is TCP/IP, TCP and IP are only two of the
protocols. (An alternative name is the Internet Protocol
Suite.)
The purpose of the network interface layer and the
application layer are obvious – the former handles the
details of the communication media (Ethernet, ring,
etc) while the latter handles one specific user
application (FTP, Telnet, etc.).
This figure shows some layers and protocols in the
TCP/IP protocol suite.
User
Process
User
Process
User
Process
User
Process
application
CP
UDP
transpor
ICMP IP IGMP
network
ARP
Hardware
Interface
RARP
link
media
Figure A.3 Various protocols at the different layers
in the TCP/IP protocol suite.
TCP and UDP are the two predominant transport
layer protocols. Both use IP as the network layer.
2.0 NETWORK LAYER
2.1 IP
IP provides communication between hosts on
different kinds of networks (i.e., different data-link
implementations such as Ethernet and Token Ring).
It is connectionless, unreliable packet delivery
service. Connectionless means that there is no
handshaking, each packet is independent of any
other packet. It is unreliable because there is no
guarantee that a packet gets delivered; higher-level
protocols must deal with that.
2.2 IP Address
IP defines an addressing scheme that is independent
of the underlying physical address (e.g, 48-bit MAC
address). IP specifies a unique 32-bit number for
each host on a network. This number is known as
Page 40

APPENDIX / BASIC TCP/IP DESCRIPTION A-3
the Internet Protocol Address, the IP Address or the
Internet Address. These terns are interchangeable.
Each packet sent across the internet contains the IP
address of the source of the packet and the IP
address of its destination.
For routing efficiency, the IP address is considered in
two parts: the prefix which identifies the physical
network, and the suffix which identifies a computer on
the network. A unique prefix is needed for each
network in an internet. For the global Internet,
network numbers are obtained from Internet Service
Providers (ISPs). ISPs coordinate with a central
organization called the Internet Assigned Number
Authority (IANA).
2.3 IP Address Classes
The first four bits of an IP address determine the class
of the network. The class specifies how many of the
remaining bits belong to the prefix (aka Network ID)
and to the suffix (aka Host ID). The first three
classes, A, B and C, are the primary network classes.
Class
First 4
A 0xxx 7 128 24
B 10xx 14 16,384 16 65,536
C 110x 21 2,097,152 8 256
D 1110 Multica st
E 1111 Reserved for future use
Bits
Number
of Prefix
Bits
Max # of
Networks
Number
of Suffix
Bits
Max # of
Hosts Per
Network
16,777,216
Range
0000 to
127.255.255.255
128.0.0.0 to
191.255.255.255
192.0.0.0 to
223.255.255.255
224.0.0.0 to
239.255.255.255
240.0.0.0 to
255.255.255
When interacting with mere humans, software uses
dotted decimal notation; each 8 bits is treated as an
unsigned binary integer separated by periods. IP
reserves host address 0 to denote a network.
140.211.0.0 denotes the network that was assigned
the class B prefix 140.211.
2.4 Netmasks
Netmasks are used to identify which part of the
address is the Network ID and which part is the Host
ID. This is done by a logical bitwise-AND of the IP
address and the netmask. For class A networks the
netmask is always 255.0.0.0; for class B networks it is
255.255.0.0 and for class C networks the netmask is
255.255.255.0.
2.5 Subnet Address
All hosts are required to support subnet addressing.
While the IP address classes are the convention, IP
addresses are typically subnetted to smaller address
sets that do not match the class system. The suffix
bits are divided into a subnet ID and a host ID. This
makes sense for class A and B networks, since no
one attaches as many hosts to these networks as is
allowed. Whether to subnet and how many bits to
use for the subnet ID is determined by the local
network administrator of each network.
If subnetting is used, then the netmask will have to
reflect this fact. On a class B network with
subnetting, the netmask would not be 255.255.0.0.
The bits of the Host ID that were used for the subnet
would need to be set in the netmask.
2.6 Directed Broadcast Address
IP defines a directed broadcast address for each
physical network as all ones in the host ID part of the
address. The network ID and the subnet ID must be
valid network and subnet values. When a packet is
sent to a network’s broadcast address, a single copy
travels to the network, and then the packet is sent to
every host on that network or subnetwork.
2.7 Limited Broadcast Address
If the IP address is all ones (255.255.255.255), this is
a limited broadcast address; the packet is addressed
to all hosts on the current (sub)network. A router
will not forward this type of broadcast to other (sub)
networks.
2.8 ICMP
Internet Control Message Protocol is a set of
messages that communicate errors and other
conditions that require attention. ICMP messages,
delivered in IP datagrams, are usually acted on by
either IP, TCP or UDP. Some ICMP messages are
returned to application protocols.
A common use of ICMP is “pinging” a host. The Ping
command (Packet INternet Groper) is a utility that
determines whether a specific IP address is
accessible. It sends an ICMP echo request and waits
for a reply. Ping can be used to transmit a series of
packets to measure average round-trip times and
packet loss percentages.
3.0 LINK LAYER
3.1 ARP
The Address Resolution Protocol is used to translate
virtual addresses to physical ones. The network
Page 41

A-4 APPENDIX / BASIC TCP/IP DESCRIPTION
hardware does not understand the softwaremaintained IP addresses. IP uses ARP to translate the
32-bit IP address to a physical address that matches
the addressing scheme of the underlying hardware
(for Ethernet, the 48-bit MAC address).
4.0 THE TRANSPORT LAYER
There are two primary transport layer protocols:
Transmission Control Prot
ocol (TCP) and User Datagram Protocol (UDP). They
provide end-to-end communication services for
applications.
4.1 UDP
This is a minimal service over IP, adding only optional
checksumming of data and multiplexing by port
number. UDP is often used by applications that need
multicast or broadcast delivery, services not offered by
TCP. Like IP, UDP is connectionless and works with
datagrams.
4.2 TCP
TCP is a connection-oriented transport service; it
provides end-to-end reliability, resequencing, and flow
control. TCP enables two hosts to establish a
connection and exchange streams of data, which are
treated in bytes. The delivery of data in the proper
order is guaranteed.
TCP can detect errors or lost data and can trigger
retransmission until the data is received, complete and
without errors.
5.0 The Application Layer
There are many applications available in the TCP/IP
suite of protocols. Some of the most useful ones are
for sending mail (SMTP), transferring files (FTP), and
displaying web pages (HTTP).
Another important application layer protocol is the
Domain Name System (DNS). Domain names are
significant because they guide users to where they
want to go on the Internet.
5.1 DNS
The Domain Name System is a distributed database of
domain name and IP address bindings. A domain
name is simply an alphanumeric character string
separated into segments by periods. It represents a
specific and unique place in the “domain name
space.” DNS makes it possible for us to use
identifiers such as zworld.com to refer to an IP
address on the Internet. Name servers contain
information on some segment of the DNS and make
that information available to clients who are called
resolvers.
6.0 ETHERNET FRAME
6.1 Ethernet Frame
The term Ethernet generally refers to a standard
published in 1982 by Digital Equipment Corp., Intel
Corp., and Xerox Corp. It is the predominant form of
local area network technology used with TCP/IP
today. It uses an access method called CSMA/CD,
which stands for Carrier Sense, Multiple Access with
Collision Detection.
The Ethernet frame length ranges from 64 bytes to
1518 bytes. The Ethernet frame uses 48-bit (6-byte)
destination and source addresses. These are what
we call hardware addresses.
The next 2 bytes is the Ethernet type field which
identifies the type of data that follows. In the
Ethernet frame the data immediately follows the type
field. The data length ranges from 46 bytes to 1500
bytes. The minimum data frames for Ethernet is 46
bytes.
The CRC field is a cyclic redundancy check (a
checksum) that detects errors in the rest of the
frame. (This is also called the FCS or frame check
sequence.) The CRC field is 4 bytes.
Ethernet Encapsulation (RFC 894): 46-1500 bytes
destination
addr
source
addr
type
data
CRC
6
6
2
46-1500
4
Figure A.4 Ethernet Frame (RFC 894)
6.2 Encapsulation
When an application sends data using TCP, the data
is sent down the protocol stack, through each layer,
until it is sent as a stream of bits across the network.
Each layer adds information to the data by
prepending headers (and sometimes adding trailer
information) to the data that it receives. Figure 4.2
shows this process. The unit of data that TCP sends
to IP is called a TCP segment. The unit of data that
IP sends to the network interface is called an IP
datagram. The stream of bits that flows across the
Ethernet is called a frame.
Page 42

APPENDIX / BASIC TCP/IP DESCRIPTION A-5
A
t
t
The numbers at the bottom of the headers and trailer
of the Ethernet frame in Figure 4.2 are the typical
sizes of the headers in bytes.
A physical property of an Ethernet frame is that the
size of its data must be between 46 and 1500 bytes.
To be completely accurate in Figure 4.2 we should say that the
unit of data passed between IP and the network interface is a
packet. This packet can be either an IP datagram or a
fragment of an IP datagram.
We could draw a nearly identical picture for UDP data.
The only changes are that the unit of information that
UDP passes to IP is called a UDP datagram, and the
size of the UDP header is 8 bytes.
Ethernet
header
14
IP
header
IP
header
20
ppl
header
TCP
header
header
header
application data
TCP segment
TCP
application data
IP datagram
TCP
application data
20
Ethernet Frame
46 to 1500 bytes
user data
user data
Ethernet
trailer
4
application
TCP
IP
Etherne
driver
Etherne
Figure A.5 Encapsulation of data as it goes down the
protocol stack
Recall from Figure 1.3 (p. 2) that TCP, UDP, ICMP,
and IGMP all send data to IP. IP must add some type
of identifier to the IP header that it generates, to
indicate the layer to which the data belongs. IP
handles this by storing an 8-bit value in its header
called the protocol field. A value of 1 is for ICMP, 2 is
for IGMP, 6 indicates TCP, and 17 is for UDP.
Similarly, many different applications, can be using
TCP or UDP at any one time. The transport layer
protocols store an identifier in the headers they
generate to identify the application. Both TCP and
UDP use 16-bit port numbers to identify applications.
TCP and UDP store the source port number and the
destination port number in their respective headers.
The network interface sends and receives frames on
behalf of IP, ARP, and RARP. There must be some
form of identification in the Ethernet header
indicating which network layer protocol generated
the data. To handle this there is a 16-bit frame type
field in the Ethernet header.
Page 43

A-6 APPENDIX / BASIC TCP/IP DESCRIPTION
THIS PAGE INTENTIONALLY LEFT BLANK
Page 44

Products Designed And Manufactured
"THE HIGH HORSEPOWER DESIGN EXPERTS"
US Drives Inc.
2221 Niagara Falls Boulevard
P.O. Box 281
Niagara Falls, NY 14304-0281
Tel: (716) 731-1606 Fax: (716) 731-1524
Visit us at www.usdrivesinc.com
In The United States Of America
MODP0917 Printed in U.S.A.
Data Subject to Change Without Notice
 Loading...
Loading...