

Page 1

INTEGRATED CIRCUITS
TDA5360
Pre–Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
Objective specification, Revision 2.2 1998 Jul 30
Page 2

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
1 FEATURES
2 APPLICATIONS
3 QUICK REFERENCE DATA
4 DESCRIPTION
5 ORDERING INFORMATION
6 BLOCK DIAGRAM
7 PINOUT DIAGRAM
8 PIN DESCRIPTIONS
9 FUNCTIONAL DESCRIPTION
9.1 ACTIVE READ MODE
9.2 ACTIVE WRITE MODE
9.3 ACTIVE STW MODE
9.4 STANDBY MODE
9.5 SLEEP MODE
10 BIASING OFTHE MR ELEMENT
10.1 MR HEAD RESISTANCE AND TEMPERATURE MEASUREMENT
10.2 FAULT MODE
10.3 SERIAL INTERFACE ADDRESSING
10.4 SERIAL INTERFACE REGISTER BIT ALLOCATION
10.5 SERIAL INTERFACE OPERATIONS
10.6 REGISTERS DESCRIPTION
11 SERIAL INTERFACE TIMING
12 ELECTRICAL PARAMETERS
12.1 DC CHARACTERISTICS
12.2 READ CHARACTERISTICS
12.3 WRITE CHARATERISTICS
12.4 SWITCHING CHARACTERISTICS
13 LIMITING VALUES / RECOMMENDED OPERATION CONDITIONS
14 ABSOLUTE MAXIMUM RATINGS
TDA5360
1998 July 30
2
Page 3

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
1 FEATURES
• 12 channels design for Single-stripe (SAL and GMR) Read / Thin-film Write heads.
• Design target 350 Mbps, for d=0 (16 / 17) rate code.
• Differential Hybrid sense Reader architecture.
• MR element biased by direct programmable constant Power or constant Current.
• Voltage driven Writer architecture.
• MR read / inductive write heads biased at ground level.
• Short rise and fall time with near rail to rail voltage swing.
• Dual power supplies : +5.0 V and -5.0 V.
• On-chip AC couplings eliminate MR head DC and DC offset voltage.
• Programmable 3-wire Serial Port Interface for programming (3.3 V and 5 V TTL / CMOS compatible).
• Extensive programmability of Write current wave overshoot.
• Programmable voltage / current mode write data input.
• Programmable voltage / current mode read data output.
• Programmable Read gain.
• Programmable Reader input impedance.
• Thermal asperity detection with programmable threshold.
• Thermal asperity compression with extensive programmability.
• High spurious-noise rejections.
• Internal Dummy Head available for MR heads protection during switchings.
• FAST mode available for short Write to Read mode transient.
• Sleep, Standby, Active, Servo Track Write, and Test modes available.
• Support servo writing.
• Write / Read Fault detection with fault code read back register and Fault masking capability.
• Low power-supplies fault protections.
• Short Write to Read Recovery, including DC settling.
• On-chip digitizing of Temperature and MR element Resistance value.
• Vendor ID and chip revision register.
• Illegal Multiple Device Selected detection.
• 2 pads CS0 and CS1, hard wired, for separate activation for multiple pre-amplifiers operation.
• Requires one external resistor.
TDA5360
2 APPLICATIONS
Hard Disk Drive (HDD).
1998 July 30
3
Page 4

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
TDA5360
3 QUICK REFERENCE DATA
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
V
CC
V
EE
DC Supply voltage +4.5 +5 +5.5 V
-4.5 -5 -5.5 V
NF Noise Figure Note 3, Section 14 1.7 1.7 dB
IRNV Input Referred Noise
Voltage
Avd Differential gain VIN=1mVpp @ 20 MHz,
Rmr=66Ω; Imr=8mA;
10 MHz<f<100 MHz
R
=330Ω, Imr=8mA,
Loaddif
0.8 nV/
sqrtHz
50 dB
Rmr=66Ω,
GAIN0=0, GAIN1=1;
f
HR
-3dB frequency bandwidth Rmr=66Ω, Lmr=30 nH
-3dB: without Boost SAL
GMR
225
225
MHz
MHz
CMR Common Mode Rejection Imr=8mA, Rmr=66Ω,
10MHz<f<200MHz
1 MHz<f< 10MHz
f<100 kHz, 1mV input signal
20
40
60
dB
dB
dB
PSR Power Supply Rejection 200mVpp on Vcc or Vee,
Imr=8mA, Rmr=66Ω,
tr, t
f
I
MR(PR)
I
WR(b-p)
Write Current Rise/Fall times
(-0.8 * Iwr => +0.8 * Iwr)
Programming MR bias
current range
Programming Write current
10MHz<f<200MHz
1 MHz<f<10 MHz
f<100 kHz
Iwr=50mA; f=20 MHz;
LH=75nH, RH=10Ω 0.84 ns
SAL
GMR (see note section 10)43
Rext = 10 kΩ 10 50.3 mA
20
40
60
10.2
6 .1
dB
dB
dB
mA
mA
range (base-to-peak)
f
sclk
Serial interface clock rate 40 MHz
1998 July 30
4
Page 5

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
4 DESCRIPTION
The +/- 5.0 volt pre-amplifier for HDD described here has been designed for 12 terminals, comprised of a SAL or GMR
magneto-resistive reader and an inductive thin film writer. In read mode, the device operates as a low noise differential
preamplifier which senses resistance changes in the MR element that correspond to flux changes on the disk. In write
mode, the circuit operates as a thin film head current switch, driving the inductive element of the head.
The IC incorporates Read amplifiers with programmable gain and HF boosts, Write amplifiers, 3-wires Serial Interface,
Digital-to-Analog Converters, Thermal Asperity Detector and Programmable Thermal Asperity Compressor, reference
and control circuits which operate on a Dual Supply Voltage of +/-5V (+/-10%).
The Read amplifier has programmable medium input impedance. The DC offset between the two terminals of the MR
head is eliminated using on chip AC coupling. The bandwidth can be enhanced by using programmable high frequency
gain-boost. Fast settling features are used to keep the transients short. As an option, the Read amplifier may be left
biased during writing, so as to reduce the duration of these transients even further.
The Write amplifier has a programmable current overshoot which may be added to the programmable steady state write
current.
Fault protection is provided for a variety of read or write unsafe conditions. For added data protection, internal pull up
resistors are connected to RWN, CS0, CS1, STWN, WDP and WDN pins and pull down resistors are connected to SEN,
SDATA, SCLK, DRN and BFAST pins, to prevent accidental writing due to open lines and to ensure the device will power
up in a non-writing condition.
On-chip Digital to Analog converters for MR bias current or power and Write current are programmed via a 3 wire Serial
Interface. Head selection, Mode control, Testing and Servo Writing can also be programmed using the serial interface.
In Sleep mode, the CMOS serial interface is operationnal. Fig 2 shows the block diagram of the IC. Invalid head select
codes disable the writer, select the dummy head and trigger the FLT output.
TDA5360
5 ORDERING INFORMATION
EXTENDED TYPE NUMBER PACKAGE
TDA5360UH bare die
TDA5360UK bumped die
Fig.1 Type Number
1998 July 30
5
Page 6

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
6 BLOCK DIAGRAM
hybrid
sense
TA handling
Rin:2bits
RMR
RFE
hybrid
sense
TA handling
Rin:2bits
RMR
RFE
HEADMUX
Read Back End
MR BIAS
CURRENT
/ POWER
SETTING
TA CORRECTOR
5 bits
3bits
Av
1.5 bit
THERMAL
ASPERITY
DETECTOR
Rmr measure
temperatue
DIGITIZER
Av
On/Off
d/dt
4 bits
+
FAULT
DETECTION
CODING
SERIAL
INTERFACE
BUFFER
out
V / I
TDA5360
RDp
RDn
FLT
SDATA
SCLK
SEN
1998 July 30
voltage
driven
voltage
driven
WRITE
boost:1bit
pre-driver
CURRENT
5 bits
WDI
MUX
boost:2bits
boost 1 bit
pre-driver
6
BANDGAP
WDI
V/I
Interface
1 bit
Rext
WDp
WDn
Page 7

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
7 PAD ARRANGEMENT
DRN
BFAST
WP11
RP11
SDATA
SEN
WDP
RWN
RDN
SHIELDP
SCLK
FLT
WDN
SHIELDN
RDP
REXT
CS0
CS1
WN11
RN11
VCC
RP10
RN10
VCC
WP10
WN10
VCC
GND
TDA5360
WN7
RN9
WN9
RP9
WP9
GND
RP8
RN8
VCC
VCC
VEE
WP8
WN8
WP7
RP7
RN7
RN6
RP6
WP6
WN6
WN5
WP5
RP5
RN5
STWN
1998 July 30
RN4
RP4
WP4
RN0
WN0
RP0
WP0
RN1
RP1
WP1
WN1
RP2
WP2
WN2
RN3
RN2
RP3
VEE
WP3
WN3
WN4
Fig.2 TDA5360 pad arrangement pads up.
7
Page 8

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
8 PAD DESCRIPTION
SYMBOL Pin Description
VCC +5V supply
GND Ground
VEE -5V supply
RDP,RDN output Read Data, Differential read signal outputs
RWN logic input Read/Write : read = HIGH, write = LOW
WDP,WDN input Differential PECL or current mode write data input
FLT output
input
REXT a 10kΩ external resistor must be connected between REXT and GND
SEN logic input Serial Enable line. Active High
SCLK logic input Serial Clock line. 40 MHz max.
SDATA logic
input/output
BFAST logic input Controls reader passband or enables the Imr generator depending on the state
DRN logic input Selects the dummy head or performs a system reset depending on the state of
RP0...RP11 input MR head connections, positive end
RN0...RN11 input MR head connections, negative end
WP0...WP11 output Write head connections, positive end
WN0...WN11 output Write head connections, negative end
STWN logic input Set Low for Servo Track Write mode only
CS0 logic input Code for Chip ID
CS1 logic input Code for Chip ID
In Write mode, a fault is flagged when FLT is high.
In Read Mode, a fault is flagged when FLT is low.
a 5kΩ external resistor must be connected between FLT and VCC.
This pad is used as an input in MDS mode.
Serial Data line. Bi-directional interface
of BFCTL bit from Reg.01
RSTDMY bit from Reg.09
TDA5360
1998 July 30
8
Page 9

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
9 FUNCTIONAL DESCRIPTION
9.1 Active READ mode
Taking RWN high and programming bits MODE0 and MODE1 (see Reg.09) selects the read mode.
The Head select inputs, in serial register, select the appropriate head.
In read mode, the circuit provides either a constant power bias or a constant current bias that flows from the P to the N
side of the MR section of the head.
The value of the current/power is programmed in Reg. 02 and is referenced by the external resistor, REXT, which is
connected between the REXT pin and GND. The reference voltage on REXT pin is stable over the entire operating
temperature range and process.
The current or power in the MR element is constant over temperature.
The resistance of the MR element, RMR, changes in the presence of a magnetic field and causes a change in the MR
head voltage. The circuit acts as a low-noise differential amplifier to sense this voltage change. The read amplifier
outputs, RDP and RDN, are in phase with the MRP and MRN head ports.
The read data at pins RDP, RDN can output either voltage or current, depending on how the RVORI bit in Reg.01 is set:
LOW or HIGH respectively.
The polarity convention for current mode is :
“positive” => pin with least current flowing
“negative” => pin with most current flowing
Write current is not present in read mode under any circumstances; either transient or steady state.
The read path includes the following programmable features :
Gain programmation (Reg. 02 and Reg. 03) :
- gain only,
- a combination of gain plus differentiator (therefore HF-gain-boost),
- differentiator only.
The gain is programmable with step of 3dB between 44dB and 50dB.
Input impedance :
With bits RIN1, RIN0 (Reg.01), the input impedance of the readpath can be programmed from 15 to 30Ω.
Low Pole Frequency :
Bits LFP (Reg.03) allow the programmation of the Low Pole Frequency from 1 to 4 MHz.
Thermal Asperity Detection and Compression :
Thermal Asperity Detector flags an error on FLT line when a thermal disturbance is detected and load the
appropriate error code in Reg. 07. The threshold is programmable via Reg. 05.
Thermal Asperity Compressor extracts the signal from the disturbance. Its thresholds levels and frequency
response are also programmable with Reg.11.
TDA5360
1998 July 30
9
Page 10

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
9.2 Active WRITE mode
Taking RWN low from an Active READ mode selects the Active WRITE mode. The head select inputs, in a serial register,
select the appropriate head.
In write mode the circuit acts as a current switch with write current toggled between the P and N directions of the thinfilm section of the selected head x. The signal polarity is noninverting from WDP, WDN to WPx, WNx.
The write data at pins WDP, WDN could be driven by either a voltage or a current, according to the WVORI bit in Reg.01
(set LOW or HIGH respectively.)
The polarity convention for current mode is :
“positive” => input pin with minimum current flowing
“negative” => input pin with maximum current flowing
The writer terminal voltages are driven to GND during read mode to avoid accidental discharges to the disc.
Note that the write mode CAN NOT be selected directly from a sleep or standby condition.
The steady state value of the write current is programmed in Reg. 04 and is referenced by the external resistor, REXT,
which is connected between the REXT pin and GND. The reference voltage on REXT pin is stable over the entire
operating temperature range and process.
Internal compensation networks are optimized and provided to control the write current shape and settling characteristics
based on specified head loads. The value can be programmed in Reg. 04.
TDA5360
9.3 Active STW mode
In Active Read or Active Write mode, only one head in one preamp is selected.
A special programmation of Reg. 09, using (STWN = LOW) AND (CS0 = CS1 = HIGH) allows the user to either :
- select one head per preamp (if several preamps are adressed at the same time)
- select one head in one preamp when in read mode but two heads in one preamp when going to write mode.
In that case Head x and Head (x+6) will be selected, with x=0...5. Head x is selected via Reg. 00
9.4 STANDBY mode
The standby mode is selected by programming bits MODE0 and MODE1. (see Reg.09)
The internal write current source, and MR bias current source are deactivated while RDP, RDN and FLT outputs are in
a high-impedance state so that they can be OR’d in multiple preamplifiers applications. The device is specially designed
for reduced dissipation in this mode. Response time from Standby to Active Read mode is much shorter than from Sleep
mode to Active Read. The CMM of RDP and RDN is the same as in Sleep or Active mode. (see Note 2)
Internal fault detectors are powered off.
1998 July 30
10
Page 11

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
9.5 SLEEP mode
The sleep mode is selected by programming bits MODE0 and MODE1. (see Reg.09)
In Sleep Mode, the IC is accessible via the Serial Interface. All circuits, other than those of the CMOS Serial Interface
and the circuit which forces the data registers to their default values at power up and which fixes the DC level of RDpRDn (required when operating with more than one amplifier), are inactive. Typical static current consumption is less than
one mA, depending on the state of the logic pins where internal pull-up or pull-down resistors are connected. Dynamic
current consumption during operation of the Serial Interface in the Sleep mode and owing to external activity at the inputs
to the Serial Interface is not included. In all Modes including the Sleep mode, data registers can be
programmed. Sleep is the default Mode at power-up. Switching to other modes takes less than 0.1 ms.
The CMM of RDP and RDN is the same as in Standby or Active mode. (see Note)
Internal fault detectors are powered off.
Note 1 : At power-up, as long as DRN pin is LOW, a reset of the Serial Interface registers occurs. Before any register
programmation, the user should first force DRN pin to HIGH in order to exit the reset mode and enable a register
programmation. See description of DRN function in (10.6).
Note 2 : As a goal, the CMM of RDP and RDN is identical in all operating modes. The term “high-impedance” here means
at least 10 to 20 kOhm from RDP or RDN to an internal CMM voltage reference.
TDA5360
1998 July 30
11
Page 12

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
10 BIASING OF THE MR ELEMENT
This preamplifier has been designed for SAL and GMR elements. Programming bit GMR in Reg. 01 select either a SAL
range (LOW) or a GMR range (HIGH).
By programming bit PORI in Reg. 01, the user can program either a constant current bias (LOW) or a constant power
bias (HIGH) for the MR element. The value of the current/power is programmed on 5 bits via Reg. 02.
If bit PORI in Reg. 01 is HIGH, a constant power bias is maintained accross the MR element.
The power is defined as :
Pw = RMR * I
In power bias mode, two power ranges are possible :
For SAL heads 1.5mW to 9.25 mW in steps of 0.25mW
For GMR heads 375uW to 2.3 mW in steps of 0.0625mW
Note : whatever Power programmation is used, the IMR current flowing into the MR element will be within the min-
If bit PORI in Reg.01 is LOW, then the biasing scheme shall revert to constant current instead of constant power.
IMR is then constant over temperature and process.
In current bias mode, two current ranges are possible :
For SAL heads : 4 to 10.2 mA in steps of 0.2 mA
For GMR heads : 3 to 6.1 mA in steps of 0.1 mA
2
, where Pw is constant over temperature and process.
MR
max range given below.
TDA5360
Note : In GMR mode, IMR current is guaranted up to 5.1mA
6.1mA can be reached under certain supplies/Rmr conditions.
10.1 MR Head Resistance and Temperature Measurement
By programming RANGE0,RANGE1 bits in Reg. 08, the user can select either a Rmr measurement or a Temperature
measurement (junction temperature).
Setting DIGON bit HIGH launch a digitazation
The settling time of the digitization operation is less than TBD µs.
A 5 bit code is then available in Reg. 08, as long as DIGON stays HIGH,
Setting DIGON bit LOW, reset the 5 bit code.
In case of Rmr measurement, the user have access to two Rmr range by programming RANGE0 and RANGE1 bits.
In case of Temperature too high condition (T > 140oC), during a Temperature measurement, a Fault is triggered on FLT
line and a error code is available in Reg. 07.
1998 July 30
12
Page 13

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
10.2 Fault Mode
Fault conditions are indicated on the FLT pin (HIGH during write mode and LOW during read mode). The fault condition
is coded and stored in Reg. 07 for monitoring purposes. The fault code is cleared on power up, on system reset and on
writing to Reg.09
The FLT output is an open collector to an external resistor of 5Kohms connected to +5V.
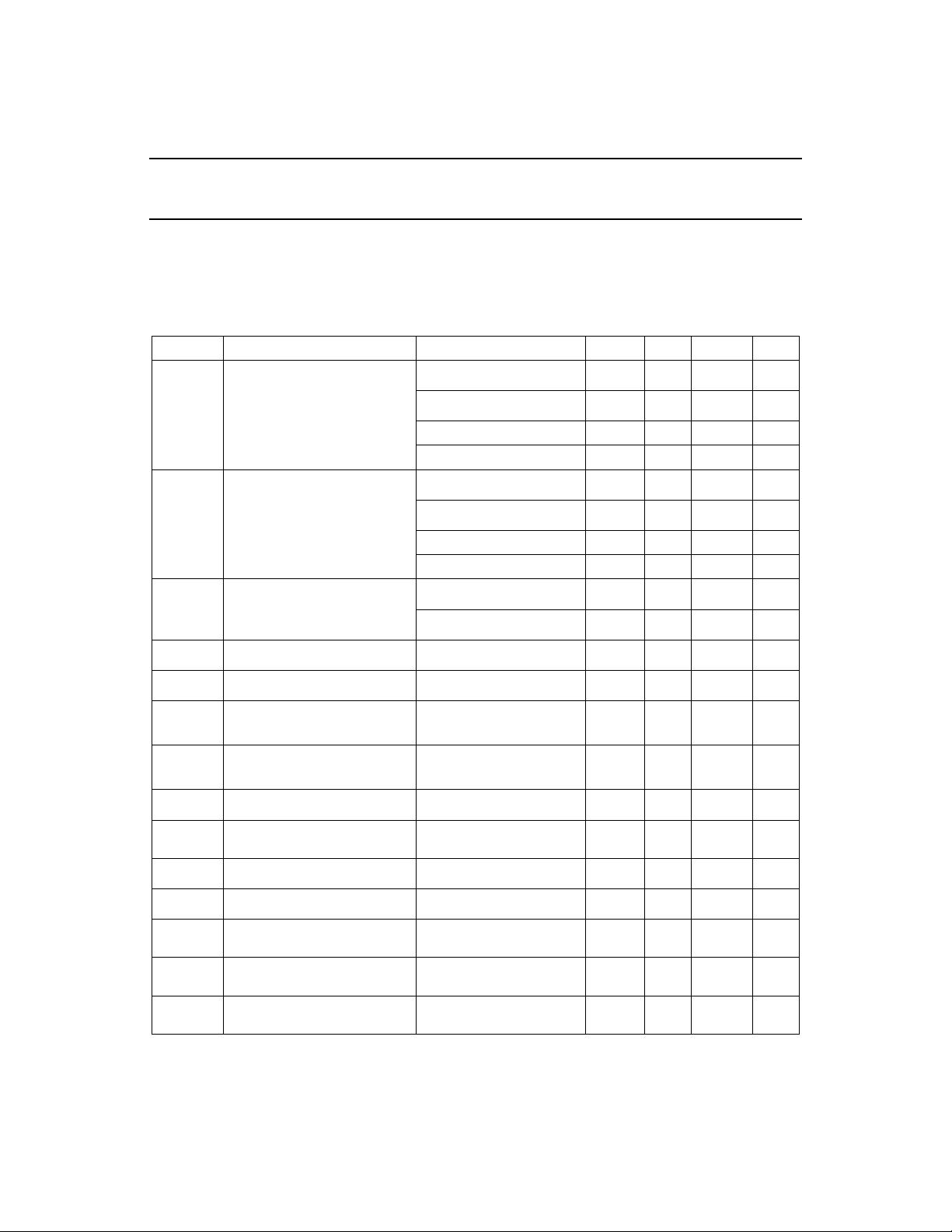
Table 1: Fault Conditions
Mode Fault condition FCOD3 FCOD2 FCOD1 FCOD0
Both No fault 0 0 0 0
Read Write current present 0 0 0 1
Fault code not used 0 0 1 0
Thermal Asperity detected 0 0 1 1
Read head open 0 1 0 0
Write No write current 0 1 0 1
Write Data frequency to low 0 1 1 0
Write head open 0 1 1 1
Write head shorted to GND 1 0 0 0
Both Rext open or short 1 0 0 1
Write to read head short 1 0 1 0
Low Vcc or Low Vee 1 0 1 1
Fault code not used 1 1 0 0
Illegal head address 1 1 0 1
Fault code not used 1 1 1 0
Temperature too high 140 C 1 1 1 1
TDA5360
1998 July 30
13
Page 14
Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
The following are valid READ fault conditions which set FLT=LOW
• Rext pin open or shorted to GND or Vcc
• Thermal Asperity detected
• Read Head open
• Power supplies too low (VCC and/or VEE)
• Write current present in read mode
• Illegal head address ( i.e. head 12, 13, 14 or 15)
In this case, besides asserting the fault flag, the MR bias current is diverted to the dummy head.
The following are valid WRITE fault conditions which set FLT=HIGH. An action can eventually be taken :
FAULT ACTION
• No write current in write mode Disable write current
• Rext pin open or shorted to GND or Vcc Disable write current
• Open write head or shorted to GND Do not disable write current
• Write data frequency too low Do not disable write current
• Power supplies too low Disable write current
• lllegal head address (i.e. HD 12, 13, 14, 15) Disable write current
TDA5360
If the write current is disabled, the writer is powered down. The only way to restart a write sequence is to switch R/W
high and then to switch R/W low again.
Trying to go in Write mode from a sleep or standby mode condition will disable the write current.
If two fault conditions occurs nearly at the same time, the first to occur will be loaded in Reg. 07.
1998 July 30
14
Page 15
Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
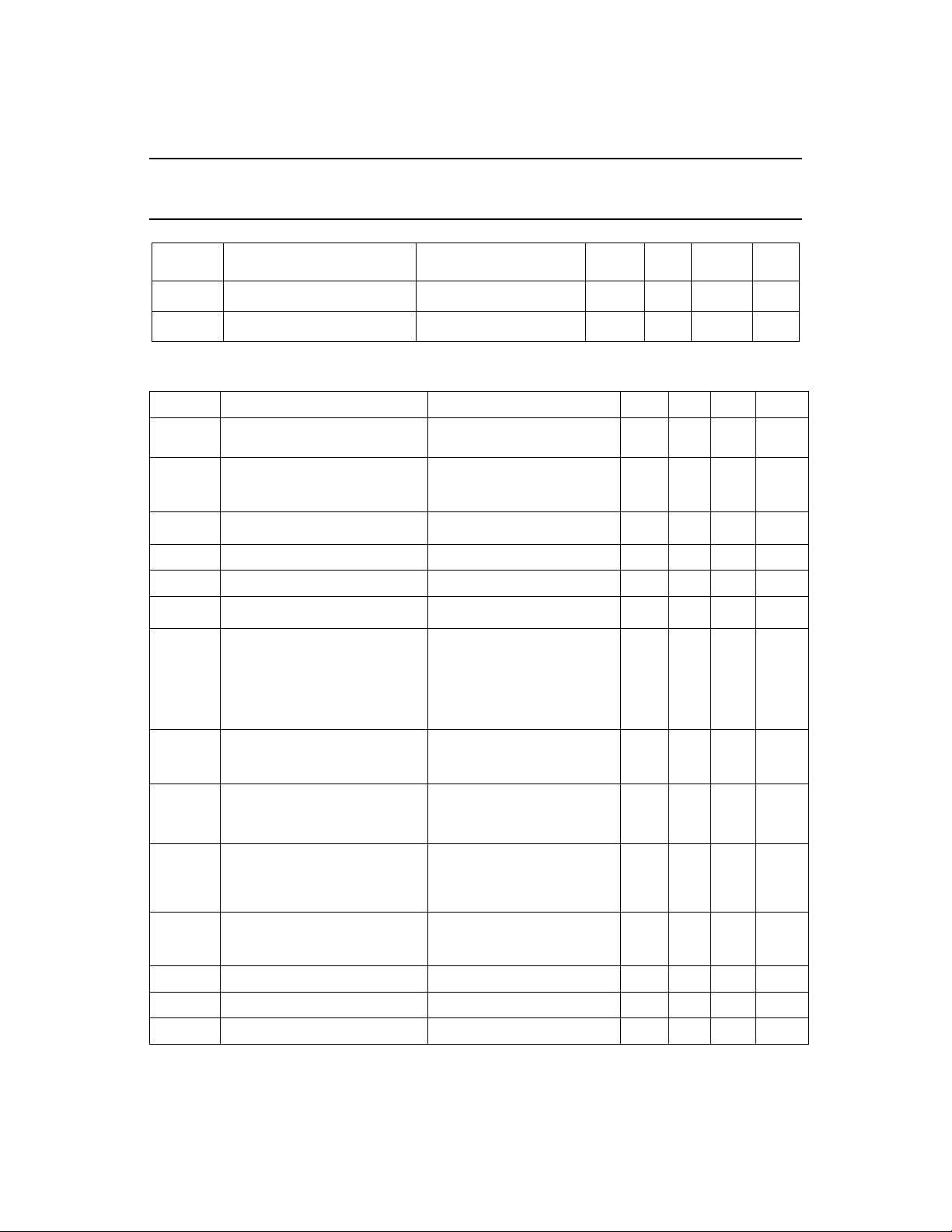
10.3 Serial Interface Address bit Allocation
Register A7 A6 A5 A4 A3 A2 A1 A0
0 X 0 0 0 0 CS1 CS0 RWN
1 X 0 0 0 1 CS1 CS0 RWN
2 X 0 0 1 0 CS1 CS0 RWN
3 X 0 0 1 1 CS1 CS0 RWN
4 X 0 1 0 0 CS1 CS0 RWN
5 X 0 1 0 1 CS1 CS0 RWN
6 X 0 1 1 0 CS1 CS0 RWN
7 X 0 1 1 1 CS1 CS0 RWN
8 X 1 0 0 0 CS1 CS0 RWN
9 X 1 0 0 1 CS1 CS0 RWN
10 X 1 0 1 0 CS1 CS0 RWN
11 X 1 0 1 1 CS1 CS0 RWN
TDA5360
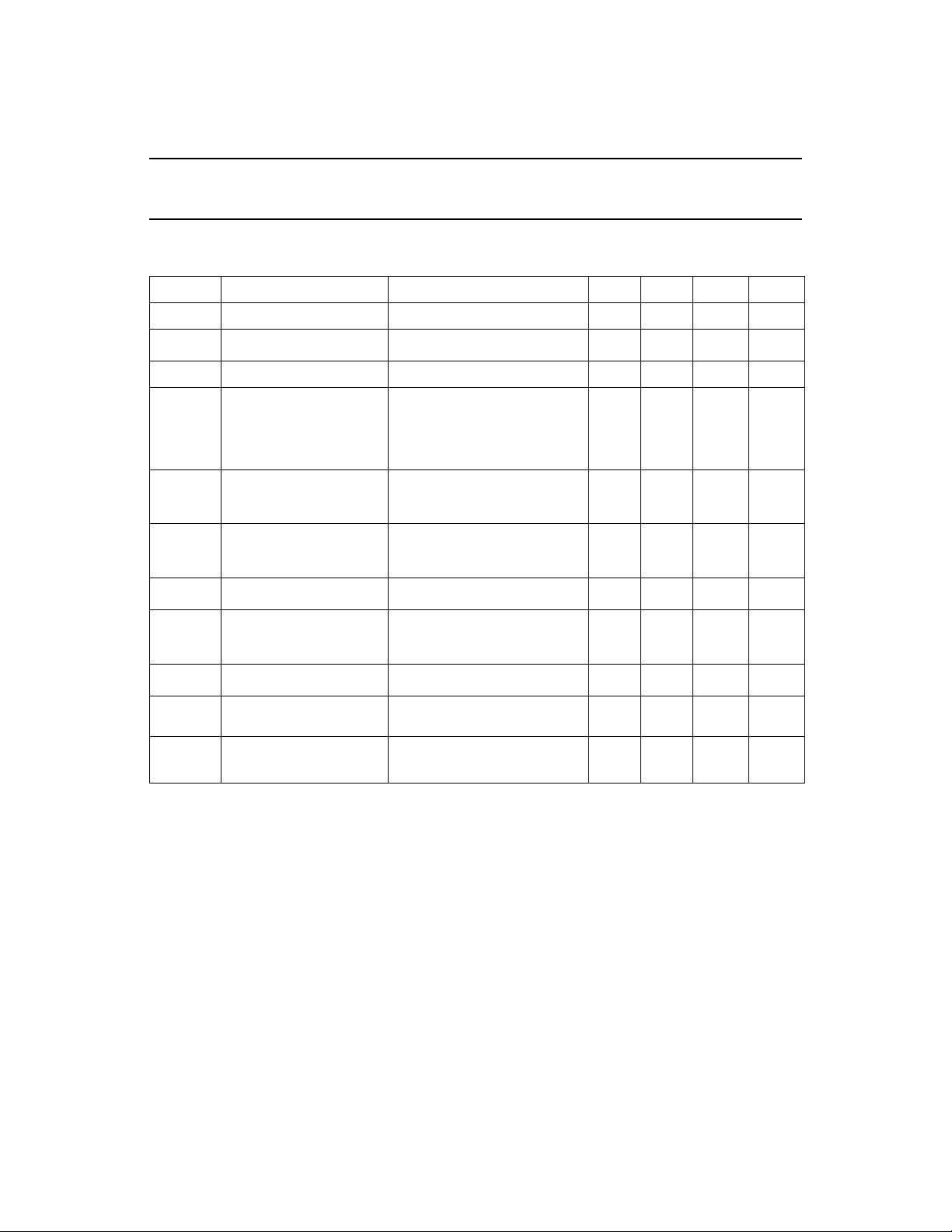
10.4 Serial Interface Register bit Allocation
9
Register D7 D6 D5 D4 D3 D2 D1 D0
0 HS3 HS2 HS1 HS0 SELT SELF LCS1 LCS0
1 X PORI GMR RIN1 RIN0 RVORI WVORI BFCTL
2 DUMMY PWR4 PWR3 PWR2 PWR1 PWR0 GAIN1 GAIN0
3 HFZ3 HFZ2 HFZ1 HFZ0 X X LFP1 LFP0
4 IW4 IW3 IW2 IW1 IW0 WCP2 WCP1 WCP0
5 TRANGE TAD TAC TAD4 TAD3 TAD2 TAD1 TAD0
6 VEND7 VEND6 VEND5 VEND4 VEND3 VEND2 VEND1 VEND0
7 X FLT2 FLT1 FLT0 FCOD3 FCOD2 FCOD1 FCOD0
8 M4 M3 M2 M1 M0 RANGE1 RANGE0 DIGON
9 X X X X SIOLVL RSTDMY MODE1 MODE0
10 X X X X X X X X
11 X X X ENFST TAU TACT2 TACT1 TACT0
1998 July 30
15
Page 16

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
10.5 Serial Interface Operations
The serial interface communication consists of an adress word of 8 bits followed by a data word of 8 bits. See section
11, page 24 and 25 for timing diagrams.
10.5.1 SERIAL ADDRESSING
When SEN goes HIGH, bits are latched-in at rising edges of SCLK. The first eight bits a7-a0 starting with the LSB, are
shifted serially into an address register.
If SEN goes LOW before 16 bits have been found, then the operation is ignored.
When STWn is HIGH; if a1 does not match CS0 or a2 does not match CS1, then the operation is ignored.
When STWn is LOW; if a1 and a2 are not HIGH, then the operation is ignored.
Bits a3 to a6 constitute the register address. Bit a7 is an unused one.
If (a0, a1, a2, STWn) = (0, CS0, CS1, 1)
or if (a0, a1, a2, STWn) = (0, 1, 1, 0)
then a PROGRAMMING sequence starts (see Reg. 09 description for details about preamp addressing)
If (a0, a1, a2, STWn) = (1, CS0, CS1, 1)
or if (a0, a1, a2, STWn) = (1, 1, 1, 0)
then READING data from the pre-amplifier can start. The data read back can be either 3.3V compatible or 5V
compatible depending on SIOLV bit in Reg. 09.
TDA5360
10.5.2 PROGRAMMING DATA
During a programming sequence, the last eight bits d0-d7, before SEN goes LOW, are shifted into an input register.
When SEN goes LOW, the communication sequence is ended and the data in the input register are copied in parallel to
the data register corresponding to the decoded address a6-a3. SEN should go LOW at least 5ns after the last rising
edge of SCLK.
10.5.3 READING DATA
Immediately after the IC detects a reading sequence, data from the data register (address a6-a3) are copied
in parallel to the input register. The LSB d0 is placed on SDATA line followed by d1 at the
next falling edge of SCLK, etc...
If SEN goes LOW before 8 address bits (a7-a0) have been detected, the communication is ignored. If SEN goes LOW
before the 8 data bits have been sent out of the IC, the reading sequence is immediately interrupted.
SEN must stay LOW at least 75ns between two adressings.
See Timing diagramms for Serial Adressing on section 11.
10.5.4 BROADCAST MODE
When A1=A2=1 and STWN=LOW, all the preamps will be adressed whatever their CS1/CS0 setup is.
This mode allows parallel programming of any register of the serial interface, and allows STW mode programming (See
Reg. 09 description).
1998 July 30
16
Page 17
Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
10.6 Registers description
Nb Register Name Contents
0 Head Select Register HS3..HS0 = 0,0,0,0 to 1,0,1,1 = H0 to H11
SELT : if HIGH, the multiple selection detector is enabled. Inactive in STW mode
SELF : is set HIGH if illegal MDS is detected (read back only bit)
( Note 0 )
LCS1,LCS0 : copy of CS1,CS0 pins state (read back only bits)
1 Control Register PORI : Select a MR Bias mode.
LOW = Current Bias
HIGH = Power Bias
GMR : select the range to be used in current or power
LOW = SAL range
HIGH = GMR range
RIN1,0 = define the input impedance of the reader.
(0,0) = 30Ω
(0,1) = 23Ω
(1,0) = 18Ω
(1,1) = 15Ω
RVORI = Reader output buffer mode.
LOW = Voltage mode
HIGH = Current mode
TDA5360
WVORI = Writer data inputs mode.
LOW = Voltage mode,
HIGH = Current mode
( Note 1a)
BFCTL = Control of BFAST pin functionality
( Note 1b)
2 Reader Bias Register DUMMY : Dummy head is selected in read mode if LOW
PWR4...PWR0 = define Imr current/power.
Range according to GMR bit setting
Rmr current bias mode :
SAL : Imr = 4mA+200uA*(pwr0 + 2 * pwr1 + 4 * pwr2 + 8 * pwr3 + 16 * pwr4)
GMR : Imr = 3mA+100uA*(pwr0 + 2 * pwr1 + 4 * pwr2 + 8 * pwr3 + 16 * pwr4)
Rmr power bias mode :
SAL : Pwr = 1.5mW+250uW*(pwr0 + 2 * pwr1 + 4 * pwr2 + 8 * pwr3 + 16 * pwr4)
GMR : Pwr = 375uW+62.5uW*(pwr0 + 2 * pwr1 + 4 * pwr2 + 8 * pwr3 + 16 * pwr4)
GAIN1, GAIN0 = read amplifier gain.
(0,0) = 44 dB
(0,1) = 47 dB
(1,0) = 50 dB
(1,1) = Differentiator only
1998 July 30
17
Page 18

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
3 Reader Bandwith
Register
4 Writer Bias Register IW4, IW3, IW2, IW1, IW0 = 5 bits to define Iwr current :
5 Thermal Asperity
Detection
6 Vendor Register VEND7...VEND0 = 8 bits for identification (read back only bits)
7 Fault Management
Register
HFZ3, HFZ2, HFZ1, HFZ0 = high frequency gain boost/ differentiator control
( Note 3 )
LFP1, LFP0 = low frequency pole.
(0,0) =1 MHz
(0,1) =2 MHz
(1,0) =3 MHz
(1,1) =4 MHz
Iwr = 10mA + 1.3mA*(IW0+2*IW1+4*IW2+8*IW3+16*IW4)
WCP2...WCP1 = 3 bits for the write current overshoot
(Note 4)
TRANGE = if HIGH, the TA detector range is shifted up 3.17mV
TAD = if HIGH, the TA detection circuits are enabled
TAC = if HIGH, the TA Compression circuits are enabled
TAD4..TAD0 = 5 bits for TAD threshold programmation (referred to the input)
Vth(mV) = 0.390
+ 3.170*TRANGE
+ 0.177*(TAD0 + 2*TAD1 + 4*TAD2+ 8*TAD3 + 16*TAD4)
(Note 5)
7 6 5 4 3 2 1 0
0 0 1 0 0 0 1 1 = rev1
0 1 0 0 0 0 1 1 = rev2
FLT2...FLT0 = 3 bits to set the reporting of a fault condition :
000 = report all fault detected
001 = Disable low supply fault
010 = Disable temperature too high fault
011 = Disable write head open/short fault
100 = Disable write data frequency too low fault
101 = disable MR power too high fault
110 = Disable TA Detected fault
111 = Disable all faults
TDA5360
1998 July 30
FCOD3...FCOD0 = 4 bits for encoding the fault conditions (read back only bits)
( Note 7 )
18
Page 19

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
8 Measurement Register M4...M0 = 5 bits for Rmr/Temperature digitazation (read back only bits)
RANGE1,RANGE0 = 2bits to define which measurement to be done
(0,0) RMR measurement for 15Ω < Rmr < 46Ω
Rmr = 698 / (15.5 + M0 + 2*M1 + 4*M2 + 8*M3 + 16*M4)
(0,1) and (1,0) : RMR measurement for 40Ω < Rmr < 90Ω
Rmr = 2094 / ( 21 + M0 + 2*M1 + 4*M2 + 8*M3 + 16*M4 )
9 Operating mode
Register
(1,1) = Temperature measurement
DIGON = is set HIGH to launch a digitazation
( Note 8 )
SIOLVL = level of SDATA when reading back a register
if LOW, 3.3V compatible.
if HIGH, 5.0V compatible.
RSTDMY = define functionality of DRN pin
( Note 9a)
Temp = 473K - 4.6K * (M0 + 2*M1 + 4*M2 + 8*M3 + 16*M4)
TDA5360
11 Thermal Asperity
Compression
1998 July 30
MODE1,MODE0 = 2 power management control bits.
(0,0) Sleep Mode
(0,1) Standby Mode
(1,0) Active Mode or STW one head
(1,1) Test Mode or STW two heads
(Note 9b)
ENFST = when TAC is enable, this bit defines BFAST functionality
( Note 11a)
TAU = Low Pole Frequency time constant of the TAC
LOW = 700 ns
HIGH = 70 ns
TACT2,TACT1,TACT0 = 3 bits to determine the TAC threshold
(0,0,0) = 4.00 mV
(0,0,1) = 2.97 mV
(0,1,0) = 2.21 mV
(0,1,1) = 1.64 mV
(1,0,0) = 1.22 mV
(1,0,1) = 0.91 mV
(1,1,0) = 0.67 mV
(1,1,1) = 0.50 mV
( Note 11b )
19
Page 20
Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
Note 0 : MDS (Multiple Device Selected) detector :
When several preamps are connected in parallel, this function allows the user detection of wrong adressing
withing the preamps.
When SELT is high, the selected preamp pull a precise current on FLT pin. If only one preamp has reacted,
SELF is LOW. If more than one preamp has reacted, the voltage on FLT pin is lower than a reference voltage
and thus SELF is HIGH.
Note 1a : The Write path can be controled by either a voltage or a current input signal.
The signal polarity is non inverted from WDP - WDN input to WPx - WNx output
Voltage mode : WDP-WDN > 0 => WPx-WNx > 0 (current flowing externally from WPx to WNx)
Current mode : current has to be pulled from WDP and WDN pins.
The positive side for signal, is the one where the least current is pulled
The negative side for signal, is the one where the most current is pulled
most current pulled from WDN => current flowing externally from WPx to WNx)
Note 1b : BFCTL define BFAST functionality :
BFCTL BFAST Function
LOW LOW IMR generator ON (Reader ON) during write
LOW HIGH IMR generator OFF (Reader OFF) during write
HIGH LOW Normal Reader PassBand
HIGH HIGH Low Frequency corner increased to 8 MHz
See ENFST bit in Reg. 11 for restrictions of BFAST functionality
Note 3 : For differentiator only (GAIN0 = GAIN1 = 1),
the midrange setting ( HFZ3 = 1, HFZ0 = HFZ1 = HFZ2 = 0 ) have a gain of 44dB at 100 Mhz.
i.e. gain (@100 Mhz)= 80 +10 * (HFZ0 + 2*HFZ1 + 4*HFZ2 + 8*HFZ3)
TDA5360
For gain plus differentiator (other GAIN0, GAIN1 programmation)
the midrange setting (HFZ3=1, HFZ0,1,2=0) create a zero at 300 Mhz independent of the gain bits.
HF Zero @ f = 2400 MHz / (HFZ0 +2*HFZ1 + 4*HFZ2 +8*HFZ3)
i.e. gain = 150 + 75 * ( GAIN0 + 2*GAIN1 - 5*GAIN0*GAIN1)
Note 4 : In order to increase performance for high data rate, 3 bits are available to tune the write current waveform.
WCP2 : this bit is used to add a capacitive boost during a transition of the write current.
WCP1,WCP0 : these bits are used to increase the internal swing on the write data signal.
when IW4 is HIGH ( Iwr > 30.8 mA), some capacitive compensation is also activated in the write driver.
Note 5 : The threshold range of the TAD can be shifted up by 50% by setting TRANGE HIGH.
1998 July 30
In that case the steps are still 177uV,
but the range is shifted from ( 0.390mV-5.877mV ) to ( 3.560mV-9.047mV )
The relation between the threshold of the TAD programmed in Reg. 05 and the real threshold is a function of
the input impedance of the reader and the low corner frequency of the reader.
20
Page 21

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
Formula to link real TAD threshold with LF pole of the reader and programmed input impedance :
VthVthprog
----------------------------------------------------------×=
K
where : fLFP is the low frequency pole of the read amplifer (1 to 4 MHz, programmable via Reg. 03)
and :
fTA is the frequency of the principal harmonic of the TA signal.
K
RINnom
-----------------------------------------=
RINnomRMR+
0.85
1
------------------------
+
KfTA×()
-------------------------------------------×
1
+
fLFP
fLFP
-------------
fTA
2
2
TDA5360
where : RINnom is the input impedance of the reader in mid-band (programmable via Reg. 01)
For RINnom = 18Ω, RMR = 66Ω, fTA = 2MHz, Tj = 70
and so, Vth( fLFP = 1MHz) = Vthprog * 1.747
Vth( fLFP = 4MHz) = Vthprog * 0.945
Note 7: FAULT code protocol.
When a fault occurs, the FAULT pin is set LOW (if read mode) or HIGH (if write mode) and a 4 bits code is
available in Reg. 07 (See Section 10.2 for details).
The FAULT pin is flagged as long as the error remains present. When the error condition is removed, the
FAULT pin toggles to a non-error state, but the 4 bits code still remains present in Reg. 07
To Reset the FAULT code, the user should reprogramm Reg. 09.
Some fault detections can be inhibited via FLT2,1,0 bits. If an action is linked to the inhibited detection (for
example inhibiting the write current when a low power supply condition occurs), then the action is still taken,
but no fault code and no FAULT pin toggling occurs.
Note 8 : RMR and Temperature Digitizer
- RMR digitizer
This measurement can only be done in Read mode, with the head to be measured selected.
the Digitazation is launched when DIGON toggles from LOW to HIGH,
after a maximum of TBD us, a 5 bits code is available in Reg. 08.
The 5 bits code will only be reseted by DIGON toggling from HIGH to LOW.
1998 July 30
o
C, we have K = 0.214
21
Page 22

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
- Temperature digitizer
This measurement can be done either in Active Read mode or in Active Write mode.
Note 9a : RSTDMY define DRN pin functionality
RSTDMY DRN Function
LOW LOW Serial Interface register reset
LOW HIGH No effect
HIGH LOW No effect
HIGH HIGH Dummy Head selected in read mode
Note 9b : MODE1,MODE0 power management control bits
A2 A1 Mode1 Mode0 STWN
CS1 CS0 0 0 x Sleep
CS1 CS0 0 1 x Standby
CS1 CS0 1 0 1 Active Read or Write
1 1 1 0 0 Active STW with one head
CS1 CS0 1 1 1 Test mode
1 1 1 1 0 Active STW with 2 heads in write mode
1 1 x x 1 Forbidden : no change in register
TDA5360
- Test mode is a state where both Reader and Writer are ON when R/W pin is LOW : in write mode, reader
signal is present at RDP-RDN output pins.
- (A2=A1=1 and STWN=0) is a broadcast mode condition, where all the preamps will treat the data arriving on
SDATA line.
- In order to get two write head selected, Head Hx should be programmed in Reg. 00 (x = 0 to 5). In that case
Head Hx and Head H(x+6) will be selected in STW (Servo Track Write) 2 heads.
Note 11a : ENFST define BFAST pin functionality when Thermal Asperity Compression is ON
Note 11b : Thermal Asperity Compression ( TAC ) functionality
ENFST BFAST functionality
LOW inhibit BFAST control of the passband
HIGH enable BFAST control of the passband
When a thermal asperity occurs at the reader input, the reader output signal get superposed with an amplified
signal corresponding, to a certain extent, to the thermal asperity.
1998 July 30
22
Page 23

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
The aim of the TAC is to limit the amplitude and the duration of the perturbation seen at the reader output.
Because thermal asperity amplitude is not constant, the TAC need some threshold programmation to define
the sharpness of the response.
note that reducing the TAC threshold also impact the Low corner frequency value of the read amplifier.
TDA5360
1998 July 30
23
Page 24

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
11 SERIAL INTERFACE TIMING
t > 5ns
1 Tclk
a0=1 a2a1 a3 a4 a5 a6 a7
Address
When Fclk > 20 MHz and a register reading is performed, it is necessary to extend the clock period as above
When Fclk < 20 MHz, this is not necessary
READ
2 Tclk
1.5 Tclk
WRITE
d0
d1 d2 d3
Data
d4
d5
t > 5ns
d6 d7
TDA5360
SEN
SCLK
SDATA
a0=0
0...Reg.00H
1998 July 30
a2a1 a3 a4 a5 a6 a7
Address
1 Tclk
0.5 Tclk
24
d0
d1 d2 d3
Data
d4
d5
SEN
SCLK
SDATA
d5 d7
Page 25

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
t_sen_sen
SEN
tr
trsen_sclk
SCLK
tr
tclkperiod tf_sclk_sen
tsetup
tclkwidth
thold
TDA5360
tf
tclklow
SDATA
SEN timing Description Min Nom Max Unit
tr_sen_sclk 90% of SEN to 10% of SCLK 5 ns
tf_sclk_sen last SCLK to 90% of SEN 5 ns
tr,tf rise/fall time 10%-90% 2 Tclk/4 ns
t_sen_sen delay between 2 SEN 75 ns
SCLK timing
frequency 40 MHz
tr , tf rise/fall time 10%-90% 2 Tclk/4 ns
tclklow 10% of SEN to CLK state change 5(*) ns
tclkwidth TBD ns
SDATA timing
tsetup data setup time before 10% of SCLK 5 Tclk/2 ns
thold data hold time after 90% of SCLK 5 Tclk/2 ns
1998 July 30
(*) either positive or negative, but ABS (tclklow) > 5ns
25
Page 26
Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
12 ELECTRICAL PARAMETERS
12.1 DC Characteristics
Unless otherwise specified, recommended operating conditions apply
CS0=CS1=LOW, DRN=HIGH, BFAST=LOW, STWn=HIGH, RIN=18 Ohm, LFP = 1MHz, Imr = 8mA, Rmr = 66 Ohm
Iwr = 30.8mA.
SYMBOL PARAMETER CONDITIONS MIN TYP MAX UNIT
I
CC
I
EE
Pw (TJ=105°C) Write Mode IWR = 30.8 mA 800 1050 1625 mW
VCC Supply Current
VEE Supply Current
Power Dissipation Read Mode, IMR = 8mA 365 435 525 mW
Read Mode, IMR = 8mA 65 75 85 mA
Write Mode, IWR = 30.8 mA 100 130 175 mA
Standby Mode 200 1400 2500 uA
Sleep Mode 200 700 2000 uA
Read Mode, IMR = 8mA -20 -12 -8 mA
Write Mode, IWR = 30.8 mA -150 -80 -60 mA
Standby Mode -200 -5 0 uA
Sleep Mode -200 -5 0 uA
TDA5360
V
IL
V
IH
I
IL
I
IH
V
OL
V
OH
I
OH
V
OL
1998 July 30
Input Low Voltage TTL 0 0.8 V
Input High Voltage TTL 2.4 5 V
Input Low Current
VIL = 0.8 V
Input High Current
VIH = 2.4V
Output Low voltage SDATA IOL = 4mA 0.4 V
Output High voltage SDATA 5V mode
Output High Current FLT VOH = 5.0V 50 uA
Output Low Voltage FLT IOL = 4mA 0.4 V
High level WDP and WDN PECL (Note 1)
Low level WDP and WDN PECL (Note 1)
|WDP-WDN| PECL swing Voltage mode selected
PECL
TTL -160
PECL
TTL
SDATA 3.3V mode
Current mode (Note2) -0.25
Current mode (Note 2)
peak to peak (Note 1) 0.4 1.5 V
26
3.6
2.4
2.4
- 4 -1
50 uA
50
80
Vcc
3.6
Vcc
0
uA
uA
uA
V
V
V
mA
V
mA
Page 27
Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
Voltage compliance for WDP
and WDN in current mode
V
CCTL
V
EETL
12.2 Read Characteristics
Unless otherwise specified, recommended operating conditions apply.
SYMBOL PARAMETER CONDITIONS MIN TYP MAX UNIT
I
MR
Pwr MR Power Range SAL
V
Rext
A
Vd
f
HR
VCC Fault Threshold Hysteresis=100mV +/- 10% 3.80 4.00 4.20 V
VEE Fault Threshold Hysteresis=100mV +/- 10% -4.20 -4.00 -3.80 V
MR Current Range SAL
MR Power Tolerance 3 < IMR < 10mA -5 +5 %
MR Bias Current Overshoot 0 %
RMR Digitizer Accuracy 5 %
Rext Reference Voltage 1.31 V
Differential Voltage Gain VIN = 1mVPP @ 20MHz,
Passband Upper -3dB
Frequency
CMM of the inputs
in current mode
GMR
GMR
(Note 3)
R
dif = 330 Ohm,IMR=8mA,
Load
R
= 66 Ohm,
MR
RIN = 18 Ohm,
GAIN0=0, GAIN1=1,GMR=0
RMR = 66Ω;LMR=30nH
- 3dB. Without boost.
1.5 Vcc -1.7 V
4
3
1.500
0.375
48 50 52 dB
225
TDA5360
8 10.26mA
4.219.25
2.30mWmW
MHz
f
LR
IRNV Input referenced noise voltage
NF Noise figure (Note 5) 1.7 dB
1998 July 30
Passband Lower -3dB
Frequency
(including MR bias current noise,
excluding Rmr noise)
MR bias current noise IMR=8mA 10 MHz<f<100MHz
HF noise +3dB frequency Preamp noise=head noise 350 MHz
LF noise +3dB frequency Preamp noise=head noise 3 MHz
RMR = 66Ω; LMR = 30nH;
LPF0=0
LPF1=1
RMR = 66Ω; IMR=8mA
10 MHz<f<100 MHz, GMR=0
(Note 4)
IMR=5mA 10 MHz<f<130MHz
27
3 MHz
0.8 nV/
8
5.7
÷sqrt
Hz
pA/
sqrt÷
Hz
Page 28

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
C
IN
R
IN
DR Dynamic Range AC input where AVd falls to
CMR Common Mode Rejection IMR = 8mA, RMR = 66Ω,
PSR Power Supply Rejection
CS Channel Separation Unselected Channels:
VOS Output Offset Voltage IMR=8mA, RMR=66Ω,
V
OCM
R
SEO
Differential Input
Capacitance
Differential Input
Resistance
from a signal on VCC, VEE or any
logic pin, to RDP, R
Common Mode Output Voltage 2.45 V
Single-Ended Output
Resistance
DN
RIN0=0, RIN1=1 18 Ohm
90% of its value at@f = 20MHz TBD
10 Mhz < f < 200 Mhz
1 Mhz < f < 10 Mhz
f < 100 KHz, GMR=0,
1mV input signal
300mV
IMR = 8mA, RMR =66Ω,
10 Mhz < f < 200 Mhz
1 Mhz < f < 10 Mhz
f < 100 KHz, GMR=0
VIN = 1mV
1 < f < 200 MHz
GAIN0=GAIN1=0, GMR=0
on VCC or VEE,
P-P
PP
50
TDA5360
10 pF
mV
20
40
60
20
40
60
17.5 Ohm
dB
dB
dB
100 mV
PP
I
O
THD Total Harmonic Distortion First 10 harmonics 0.5 %
I
DISK
DV
OCM
1998 July 30
Output Current AC Coupled Load, RDP to RDN
MR head potential From any point to GND -500 +500 mV
MR Head-to-Disc Contact Current Extended contact
Common Mode Output Voltage
Change
TA Detection Response Time TA occurred to FLT active 20 40 nS
RVORI = HIGH
RVORI = LOW
Maximum Peak Discharge for
<20ns
C
=300pF,R
DISK
V
(READ) - V
OCM
(WRITE)
28
DISK
=10MΩ
OCM
TBD
4 mA
100
20uAmA
100 mV
Page 29

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
12.3 Write Charateristics
Unless otherwise specified, recommended operating conditions apply,
IW=50mA, LH=75nH, RH = 10Ω, f
SYMBOL PARAMETERS CONDITIONS MIN TYP MAX UNIT
I
WR
∆I
WR
I
UH
f
DATA
R
O
Write Current Range 10 30.8 50.3 mA
/ I
Write Current Tolerance -7 7 %
WR
Differential Head Voltage
Swing
Unselected Head Current
Glitch
Write Data Frequency for
Safe Condition
Differential Output
Resistance
=5MHz, Ambient temperature.
DATA
Iwr = 50mA TBD 16 V
IW = 50mA 1 mA
FLT = Low 1 MHz
30 60 Ohm
TDA5360
PK
PP
PK
C
O
A
SYM
tr , t
f
T
WSET
W
COV
1998 July 30
Differential Output
Capacitance
Asymmetry
(A
= |tr-tf| )
SYM
Rise/Fall Time
(-0.8 * IWR => +0.8 * IWR)
Write Current Settling Time IWR = 50mA,
Write Current Overshoot IW = 50mA,
6 pF
Write Data has 50% duty cycle &
0.5ns rise/fall time, load=short
10-90%; IW = 50mA
LH=75nH, RH=10Ω
LH=75nH, RH=10Ω
LH = 75 nH, RH = 10Ω
WCP0,1,2 = 000
0.1 ns
0.84 ns
2.5 ns
20 %
29
Page 30
Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
12.4 Switching Characteristics
Unless otherwise specified, recommended operating conditions apply
PARAMETER CONDITIONS MIN TYP MAX UNIT
SI Serial Interface timing (Note 6)
t
RW
t
WR
t
CS
t
HS
t
RI
t
D1
t
D2
t
D3
T
RSET
R/WN to Write Mode To 90% of write current 50 ns
SEN to Write Mode To 90% of write current 50 ns
R/WN to Read Mode Reader outputs loaded with high-
CS to Read Mode Reader outputs loaded with high-
Head Switching Reader outputs loaded with high-
CS to Unselect To 10% write current 50 ns
Safe to Unsafe 50% WDP to 50% FLT
Unsafe to Safe 50% WDP to 50% FLT 20 ns
Head Current Propagation
Delay
MR Bias Current Settling
Time
pass single ended filters :
R=165Ω, C=270pF
Writer output shorted
(Note 7)
pass single ended filters :
R=165Ω, C=270pF
pass single ended filters :
R=165Ω, C=270pF
when a low frequency condition
occurs.
From 50% of WDP to 50% of write
current, load=short
IMR = 8mA, RMR =66Ω
(Note 8)
TDA5360
175 ns
1 us
1 us
1 us
5 ns
1 us
Notes:
1. The differential peak to peak voltage swing could be from 0.4V to 1.5V and the common mode should be such that
for any of the two states the maximum High shall be less than Vcc and the minimum LOW shall be more than 2.4V.
2. In current mode, a ratio of at least 5 sould exist between the HIGH and LOW level currents.
3. Whatever constant power is programmed, the value of the Imr current can not exceed the limits given in the constant
current mode.
4. The input referred noise voltage, excluding the noise of the MR resistor iis defined as follows :
2
4 kTRMR×××–=
Av
30
1998 July 30
vn
2
vnout
--------------
Page 31

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
5. The noise figure is defined as :
NF[dB] = 10xlog[(Vnout/Av)2 / (4kTxRMR)]
where Av is the gain and Vnout is the noise voltage at the output of the amplifier
6. See Section 11 for Serial Interface timing diagrams
7. This tWR is defined for a specific load on RDP,RDN reader outputs :
RDP
R
MR
tWR is the time between R/Wn going HIGH and the time when :
AND the differential DC decaying at RDPch-RDNch is below 10mV :
90% of the signal envelop is present at RDPch-RDNch
A
v
RDN
270pF
270pF
TDA5360
RDPch
330 Ohm
RDNch
RDPch-RDNch
10mV
R/Wn
Changing the load of the preamp will change tWR according to the new RC time constant.
8. When changing MR bias current, from SEN to 90% of IMR bias current.
1998 July 30
tWR
31
Page 32

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
TDA5360
13 LIMITING VALUES / RECOMMENDED OPERATION CONDITIONS
In accordance with the Absolute Maximum System (IEC 134)
SYMBOL PARAMETER CONDITIONS MIN. TYP MAX. UNIT
V
CC
Positive Supply voltage
note1 4.5 5.0 5.5 V
range
V
EE
Negative Supply voltage
note 2 -4.5 - 5.0 -5.5 V
range
V
IH
High level CMOS input
2.4 V
CC
voltage
V
IL
Low level CMOS input
0 0.8 V
voltage
V
i(dif)(p-p)
Differential Peak to Peak
0.4
0.7
1.5
input voltage
(Writer input)
High level PECL input
voltage
Low level PECL input
2.4
3.2
2.8
V
CC
voltage
Imode
(Writer input)
T
amb
T
j
R
MR
L
l(tot)
Differential Peak to Peak
0.4
0.8
1.0
input current
High level input current
Low level input current
-1.4
-1.2
-0.4
-0.1
Ambient temperature 0 55 70 °C
Junction temperature when reading
when writing
70 110
130
MR element resistance 46 66 86 Ohm
Total lead inductance to
in each lead - 17 nH
the head
V
V
V
V
mA
mA
mA
°C
R
l(tot)
V
MR
V
sig(dif)(p-p)
L
wh
R
wh
C
wh
R
ext
1998 July 30
Total lead resistance to the
in each lead - 1.5 Ohm
head
Voltage accross MR
1 V
element (RPx-RNx)
MR head input signal peak
differential 0.4 1 3 mVpp
to peak voltage
Write Head inductance including lead 75 nH
Write Head resistance including lead - 10 Ohm
Write head capacitance including lead - TBD pF
Reference resistor Iref=Vref/Rext 9.9 10 10.1 k Ω
32
Page 33

Philips Semiconductors Objective Specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
TDA5360
Notes
1. A supply by-pass capacitor from VCC to ground or a low pass filter may be used to optimize the PSRR.
2. A supply by-pass capacitor from VEE to ground or a low pass filter may be used to optimize the PSRR
14 ABSOLUTE MAXIMUM RATINGS
SYMBOL PARAMETER MIN. MAX. UNIT
V
CC
V
EE
V
IN
V
n1
Positive supply voltage -0.5 6.0 V
Negative supply voltage -6.0 0.5 V
Digital input voltage -0.5 VCC+0.3V V
Voltage on all pins except VCC, read inputs RPx, RNx, write
-0.5 5.5
outputs WPx, WNx (x=0 to 11) and the ones mentionned in
this table
but not higher than
V
n2
V
n3
T
stg
T
j
Voltage on write driver outputs WPx, WNx
but not larger than
V
EE
VEE-0.5
Read inputs RPx, RNx -1 1 V
IC Storage temperature range -65 150 °C
Junction temperature range 150 °C
VCC+0.5
V
CC
VCC+0.5
V
V
V
V
1998 July 30
33
Page 34

Philips Semiconductors Objective specification, Revision 2.2
Pre-Amplifier for Hard Disk Drive with
MR-Read / Inductive Write Heads
Data sheet status
Data sheet
status
Objective
specification
Preliminary
specification
Product
specification
Product
status
Development
Qualification
Production
Definition
This data sheet contains the design target or goal specifications for product development.
Specification may change in any manner without notice.
This data sheet contains preliminary data, and supplementary data will be published at a later date.
Philips Semiconductors reserves the right to make chages at any time without notice in order to
improve design and supply the best possible product.
This data sheet contains final specifications. Philips Semiconductors reserves the right to make
changes at any time without notice in order to improve design and supply the best possible product.
[1]
TDA5360
[1] Please consult the most recently issued datasheet before initiating or completing a design.
Definitions
Short-form specification — The data in a short-form specification is extracted from a full data sheet with the same type number and title. For
detailed information see the relevant data sheet or data handbook.
Limiting values definition — Limiting values given are in accordance with the Absolute Maximum Rating System (IEC 134). Stress above one
or more of the limiting values may cause permanent damage to the device. These are stress ratings only and operation of the device at these or
at any other conditions above those given in the Characteristics sections of the specification is not implied. Exposure to limiting values for extended
periods may affect device reliability.
Application information — Applications that are described herein for any of these products are for illustrative purposes only. Philips
Semiconductors make no representation or warranty that such applications will be suitable for the specified use without further testing or
modification.
Disclaimers
Life support — These products are not designed for use in life support appliances, devices or systems where malfunction of these products can
reasonably be expected to result in personal injury . Philips Semiconductors customers using or selling these products for use in such applications
do so at their own risk and agree to fully indemnify Philips Semiconductors for any damages resulting from such application.
Right to make changes — Philips Semiconductors reserves the right to make changes, without notice, in the products, including circuits, standard
cells, and/or software, described or contained herein in order to improve design and/or performance. Philips Semiconductors assumes no
responsibility or liability for the use of any of these products, conveys no license or title under any patent, copyright, or mask work right to these
products, and makes no representations or warranties that these products are free from patent, copyright, or mask work right infringement, unless
otherwise specified.
Philips Semiconductors
811 East Arques Avenue
P.O. Box 3409
Sunnyvale, California 94088–3409
Telephone 800-234-7381
Copyright Philips Electronics North America Corporation 1998
All rights reserved. Printed in U.S.A.
Date of release: 09-98
Document order number: 9397 750 04468
 Loading...
Loading...